PERANCANGAN EMULATOR KIPAS PEMBUANG PANAS
Makalah Mata Kuliah Penggunaan Mesin ListrikSWITCHED RELUCTANCE
MOTOROktarico Susilatama PP (21060110141053)
[email protected] Teknik Elektro, Fakultas
Teknik, Universitas Diponegoro, Jl. Prof. Sudharto, Tembalang,
Semarang, Indonesia
Abstrak Switched reluctance drive dikembangkan pada tahun 1980
an untuk menyelesaikan dalam masalah efisiensi, daya tiap satuan
berat dan volume, kehandalan dan fleksibilitas operasional. Motor
dan hubungannya dengan penggerak elektronika daya harus didesain
sebagai kesatuan yang terintegrasi dan di optimasi untuk
spesifikasi tertentu, contohnya untuk efisiensi maksimum dengan
sebuah beban tertentu, atau jangkauan kecepatan maksimum atau torsi
puncak jangka pendek. Walaupun relatif baru, teknologi telah
diterapkan pada aplikasi yang luas termasuk industri umum, aplikasi
kompresor dan peralatan bisnis. Motor reluktansi tersebut merupakan
motor sinkron yang beroperasi tanpa adanya eksitasi dari sumber
dc,yang operasinya bergantung dari perbedaan dan reluktansi dalam
kuadran titik. Motor fraksional biasanya dalam bentuk satu phasa
dan dalam aplikasinya membutuhkan kecepatan sinkron yang tepat
seperti pada jam listrik ataupun peralatan waktu. Motor reluktansi
sinkron adalah versi lain dari motor tipe rotor sangkar, sinkron
disini mengimplikasikan motor berputar pada kecepatan sinkron pada
keadaan normal, tergantung beban yang dipakai, selama beban lebih
rendah dari pada level tertentu.
Kata kunci : Switched Reluctance Motor (SRM),
posisi rotor, arus fasa, konverterI PENDAHULUANSwitched
reluctance motor (SRM) merupakan motor yang memiliki desain lebih
sederhana dibandingkan dengan motor induksi dan motor sinkron.
Kombinasi motor reluktansi dengan kontroler elektronika daya dapat
menghasilkan sebuah solusi ekonomis. Struktur motor sederhana
dengan kumparan yang terpusat pada stator dan tidak memiliki
kumparan dan sikat-sikat (brushes) pada rotor. Penggerak switched
reluctance motor
memberikan beberapa keunggulan yaitu efisiensi
tinggi, kecepatan operasi maksimum, performa motor bagus dalam
hal rasio torsi atau inersia yang bekerja sama dengan operasi empat
kuadran sehingga menjadi solusi dalam aplikasi kecepatan yang
variable.
Performa dari switched reluctance motor tergantung pada
pengkontrolan yang diterapkan. Terdapat tiga bagian utama dari
motor reluktansi switched yaitu motornya sendiri, konverter
elektronika daya dan kontroller. Terdapat satu unit konverter tiap
fasa. Sebuah batere atau rectifier mensuplai daya dc. Pada motor
ini tiap fasa disuplai dengan tegangan dc dengan unit konverter
elektronika dayanya yang berfungsi sebagai unit kontrol yang
mengembangkan torsi yang cenderung untuk menggerakkan kutub rotor
segaris dengan kutub stator yang terenergize dengan tujuan untuk
memaksimalkan induktansi dari kumparan eksitasi. Sebuah fakta
penting bahwa produksi torsi tidak tergantung dengan arah arus
untuk mengurangi jumlah saklar tiap fasa.
II. SWITCHED RELUCTANCE MOTOR2.1 PENGERTIAN MOTOR
RELUKTANSISwitched Reluctance Motor (SRM) merupakan jenis motor
yang memiliki konstruksi yang lebih sederhana dibandingkan dengan
jenis motor lainnya. Pada bagian stator terdapat belitan medan dan
pada bagian rotornya tidak memiliki belitan atau magnet permanen,
namun terdiri dari laminasi baja yang ditumpuk ke poros. Dengan
konstruksi mekanik yang sederhana sehingga penggunaan SRM lebih
ekonomis, dan pada bagian stator dan rotor SRM memiliki bentuk
kutub menonjol (salient pole). Oleh karena itu, SRM sering juga
disebut mesin dengan kutub ganda (doubly salient machine). Jika
kumparan pada stator dihubungkan dengan sumber tegangan, maka akan
tercipta medan magnet pada kutub-kutub stator tersebut. Saat rotor
berputar maka akan terjadi reluktansi antara rotor dengan medan
magnet pada
1
stator. Saat kutub pada rotor segaris lurus dengan kutub
menonjol pada stator maka saat itulah terjadi reluktansi medan
magnet minimum, dan jika rotor tidak segaris lurus dengan kutub
menonjol pada stator saat itu lah terjadi reluktansi medan magnet
maksimum. Sehingga menyebabkan terjadinya perputaran yang konstan
pada rotor. Bentuk konstruksi stator dan rotor dari beberapa jenis
SRM dapat dilihat pada gambar 1 berikut
.Gambar 1 konstruksi stator dan rotor SRM
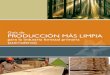
2.2 PRINSIP OPERASI MOTOR RELUKTANSI SWITCHEDMotor reluktansi
switched berbeda dari
motor reluktansi konvensional dimana rotor dan stator memiliki
kutub menonjol (salient pole). Susunan tonjolan (salient)
ganda(seperti yang ditunjukan pada gambar 2) diperlukan untuk
keefektifan selama konversi energi elektromaknetik.
Stator membawa kumparan pada tiap kutub, sedangkan rotor yang
dibuat dari laminasi pada cara umumnya tidak memiliki kumparan atau
magnet dan sehingga murah untuk dipabrikan dan sangat handal.
Ditunjukan pada gambar 2 memiliki
12 kutub stator dan 8 kutub rotor dan mewakili susunan yang
digunakan secara umum, tapi kombinasi kutub lain digunakan untuk
membentuk tiga fasa yang di energi secara mandiri dari konverter 3
fasa.
Motor berotasi dengan mengeksitasi fasa secara berurutan pada
urutan A,B,C untuk putaran berlawanan arah jarum jam atau A,C,B
untuk putaran searah jarum jam, pasangan terdekat dari kutub rotor
menarik kutub stator yang cocok dengan aksi torsi reluktansi. Pada
gambar 2, empat kumparan membentuk fasa A ditunjukan dengan garis
tipis, polaritas dari kumparan MMF di tandai dengan huruf N dan S .
Tiap kali fasa dieksitasi posisi ekuilibrium dari kemajuan rotor
sebesar 15 derajat, sehingga setelah satu putaran penuh ( tiap
fasa dari tiga fasa telah dieksitasi sekali) sudut berubah 45
derajat. Mesin berputar sekali untuk delapan putaran dasar dari
supply ke kumparan stator, sehingga sesuai dengan hubungan antara
frekuensi dasar masukan dan kecepatan putar, mesin pada gambar 2
berperilaku sebagai mesin konvensional 16 kutub.
Gambar 2 Motor reluktansi switched (SR). Tiap 12 kutub membawa
satu kumparan padat sedangkan 8 kutub rotor tidak memiliki kumparan
ataupun magnet
Terdapat perbedaan desain penting yang mencerminkan pandangan
yang berbeda (rotasi kontinu untuk SR, progres bertahap untuk
stepper ), tapi disisi lain mekanisme dari produksi torsi ialah
mirip. Namun, ketika stepper di desain pertama kali dan terpenting
untuk operasi loop terbuka, motor SR di desain untuk operasi
self-sinkron, fasa diaktifkan menggunakan sinyal yang diturunkan
dari detektor posisi rotor poros (RPT). Dalam hal performa, pada
semua kecepatan dibawah kecepatan base operasi kontinu pada torsi
penuh ialah mungkin. Diatas kcepatan base, fluks tidak dapat
dipertahankan lebih lama pada amplitudo penuh dan tersedia torsi
yang mengurangi kecepatan. Sifat operasi sangat mirip dengan
pengendali kontrol kecepatan, tapi dengan efisiensi satu persen
atau dua persen lebih tinggi.
Diketahui bahwa mekanisme dari produksi torsi pada motor
reluktansi switched tampak berbeda dari mesin DC, motor induksi dan
mesin sinkron dikarenakan semuanya memanfaatkan daya BIL pada
konduktor didalam medan magnet
Gambar 3 diagram operasi motor reluktansi switched
2.3 TORSI PREDIKSI DAN KENDALIJika besi dalam sirkit magnetik
merupakan ideal, ekspresi analitis dapat diturunkan untuk
mengekpresikan torsi dari reluktansi motor dalam hal posisi rotor
dan arus didalam kumparan. Pada prakteknya analisis ini ialah,
tidak hanya karena motor reluktansi switched di desain untuk
beroperasi pada tingkat saturasi magnetik yang tinggi pada sirkit
magnetik, tetapi juga karena, kecuali pada kecepatan rendah, tidak
dapat dipraktekkan untuk mencapai profil arus spesifik.
Faktanya bahwa saturasi tingkat tinggi termasuk membuat
permasalahan prediksi torsi pada desain tapi ialah mungkin untuk
menghitung fluks, arus dan torsi sebagai fungsi dari posisi rotor,
sehingga strategi pengontrolan optimum dapat di rancang untuk
menemui spesifikasi performa tertentu. Sayangnya kompleksitas ini
berarti bahwa tidak terdapat sirkit ekuivalen sederhana.
Seperti yang kita lihat ketika kita mendiskusikan motor
stepping, untuk memaksimalkan torsi rata rata dapat menetapkan arus
penuh pada tiap fasa dan untuk menghilangkan nya seketika pada
akhir dari tiap periode torsi positif. Operasi menggunakan tegangan
positif penuh pada awal dan tegangan negatif penuh pada akhir dari
periode aktif yang diacukan pada operasi pulsa tunggal. Untuk smua
motor kecil ( kurang dari 1 kW) resistansi fasa di abaikan dan
akibatnya besar fasa fluks gandeng ditentukan dengan penerapan
tegangan dan frekuensi, seperti kita lihat pada tipe motor
lainnya.
Hubungan antara fluks gandeng dan tegangan mirip sekali dengan
hukum faraday sehingga operasi pulsa tunggal memiliki bentuk
gelombang tegangan kotak dan fluks gandeng memiliki bentuk segitiga
sederhana sperti pada gambar 4 dimana menunjukan bentuk gelombang
untuk fasa A dari motor 3 fasa. (bentuk gelombang untuk fasa B dan
C ialah mirip tapi tidak ditunjukan) Setengah keatas dari diagram
menunjukan situasi pada kecepatan N, ketika setengah ke bawah
berkoresponden pada kecepatan
2N. Seperti yang kita lihat, pada kecepatan yang lebih tinggi
(frekuensi tinggi) setengah periode aktif sehingga amplitudo dari
setengah fluks, menuju pada pengurangan torsi yang tersedia..
Penting untuk dicatat bahwa bentuk gelombang fluks ini tidak
tergantung pada posisi rotor, tapi bentuk gelombang arus
koresponden karena MMF dibutuhkan untuk memberikan fluks yang
tergantung pada reluktansi efektif dari sirkit magnetik dan hal ini
tentunya bervariasi dengan posisi rotor.
Untuk mendapat torsi motor untuk bentuk gelombang fluks fasa
yang diketahui penaikan dan penurunan dari fluks harus di ukur
waktunya untuk bertepatan dengan posisi rotor.
Gambar 4 Bentuk gelombang tegangan dan fluks untuk motor
reluktansi switched pada mode pulsa tunggal
Idealnya, fluks seharusnya hanya ada ketika fluks memproduksi
torsi positif dan menjadi nol ketika
fluks akan menghasilkan torsi negatif, tapi diketahui penundaan
sehingga lebih baik untuk mengaktifkan lebih awal sehingga fluks
mencapai tingkat turunan pada titik ketika dapat menghasilkan torsi
umumnya, walaupun jika ini membawa pada beberapa torsi negatif pada
permulaan dan akhir siklus.
Pekerjaan dari sistem pengontrolan torsi ialah untuk mensaklar
tiap fasa aktif dan mati pada posisi rotor optimum yang berhubungan
dengan torsi pada waktu selesai dengan menjaga posisi rotor
menggunakan RPT. Hanya sudut apa yang menetapkan dan ditentukan
dengan acuan data yang disimpan secara digital didalam kontroller
peta memori yang menghubungkan arus,fluks, posisi rotor dan torsi
untuk mesin tertentu. Kontrol torsi dipertimbangkan kurang mudah
dari pada pengendali DC yang torsi langsung sebanding dengan arus
jangkar atau pengendali motor induksi dimana torsi sebanding dengan
slip.
2.4 KONVERTER DAYA DAN PENGENDALIPerbedaan penting antara motor
SR dan motor self-sinkron lainnya ialah bahwa kemampuan torsi penuh
dapat dicapai tanpa harus menyediakan arus positif dan negatif pada
fasa. Karena torsi tidak tergantung pada arah dari arus pada
kumparan fasa. Keunggulan dari pengendali unipolar tersebut ialah
tiap alat pensaklaran utama dihubungkan secara permanen secara seri
dengan satu dari kumparan motor tidak terdapat kemungkinan dari
gangguan shoot-through.
Pengontrolan kecepatan loop tertutup keseluruhan didapatkan pada
cara yang konvensional dengan kesalahan kecepatan yang berprilaku
sebagai permintaan torsi pada sistem kontrol torsi. Namun, pada
kasus umumnya tidaklah perlu untuk menyesuaikan tacho sebagai
sinyal feedback, kecepatan dapat diturunkan dari RPT.
Pada umumnya dengan pengendali self- sinkron, jangkauan luas
dari karakteristik operasi tersedia. Jika masukan konverter
dikendalikan secara penuh, regenerasi kontinu, dan operasi empat
kuadran ialah mungkin, dan torsi konstan lazim , daya konstan dan
tipe karakteristik seri dianggap sebagai standar. Torsi kecepatan
rendah dapat merata jika pengukuran khusus tidak diambil pada
profil pulsa arus tapi operasi kecepatan rendah
kontinu lebih baik daripada sistem umumnya dalam hal
efisiensi.
Gambar 5 grafik hubungan torsi dengan kecepatan rotasi
III. KONFIGURASI MOTOR RELUKTANSI SWITCHEDMotor reluktansi
switched dapat diklasifikasikan seperti pada gambar 6. Klasifikasi
awal dibuat pada dasar gerak alami ( berotasi atau linier).
Gambar 6 Klasifikasi Motor Reluktansi Switched
3.1 MOTOR RELUKTANSI SWITCHED BERPUTARMesin berputar yang
berdasarkan pada
motor reluktansi switched dibedakan oleh jalur medan magnet
karena arahnya sesuai dengan panjang aksial mesin. Jika jalur medan
magnet tegak lurus dengan poros , motor reluktansi switched
diklasifikasikan sebagai medan radial. Ketika jalur fluks sepanjang
dengan arah aksial, mesin disebut sebagi medan aksial SRM (Switched
Reluctance Motor).
SRM medan radial digunakan pada umumnya. Dapat dibedakan kedalam
yang lintasan
fluks lebih pendek dan yang lebih panjang berdasarkan bagaimana
kumparan diletakkan. Cara konvensional ialah jalur fluks panjang
SRM dimana kumparan fasa diletakkan pada slot yang berlawanan
seperti ditunjukan pada gambar 7. Pada jalur fluks SRM yang lebih
pendek, kumparan fasa diletakkan pada slot yang sejajar satu sama
lainnya, seperti yang ditunjukan pada gambar 8. Jalur fluks SRM
pendek memiliki keunggulan yaitu rugi-rugi inti yang lebih sedikit
karena pemutaran fluks tidak terjadi pada stator dan untuk memiliki
jalur fluks pendek. Namun demikian, SRM medan radial memiliki
kelemahan yaitu rendahnya induktansi bersama.
Gambar 7 Konfigurasi motor reluktansi switched
Gambar 8 Jalur fluks pendek SRM dengan kutub 10/8
Konfigurasi aksial SRM ditunjukan pada gambar 9. Tipe dari SRM
ini cocok untuk aplikasi dimana total panjang dapat di paksakan
seperti pada kipas langit-langit atau pada penerapan tenaga
penggerak. Kelemahan dari konfigurasi ini ialah laminasi stator
harus ditekuk satu diatas lainnya, tidak seperti susunan dari
laminasi pada konfigurasi medan radial.
Gambar 9 Medan aksial motor reluktansi switched
3.2 SRM SATU FASASRM satu fasa menarik karena memiliki kemiripan
dengan mesin induksi satu fasa dan mesin universal dan biaya
pembuatan rendah juga. Penerapan kecepatan tinggi sangat menarik
untuk SRM satu fasa. Ketika kutub stator dan kutub rotor
diselaraskan, arus dihentikan dan rotor tetap bergerak karena
energi kinetik yang tersimpan. Karena kutub menjadi tidak selaras,
kumparan stator dienergize lagi, menghasilkan torsi
elektromagnetik. Permasalahan dengan operasi SRM satu fasa muncul
hanya ketika kutub stator dan rotor sejalan pada kemandekan atau
rotor berada pada posisi dimana torsi dihasilkan lebih rendah
daripada torsi beban saat starting. Ini dapat diatasi dengan
memiliki magnet permanen pada stator untuk menarik rotor jauh dari
sejajaran atau untuk posisi yang cocok, untuk mengijinkan torsi
elektromagnetik maksimum generator, seperti ditunjukan pada gambar
10.
SRM satu fasa beroperasi dengan maksimum duty cycle 0,5 sehingga
mereka memiliki torsi yang terhenti yang berakibat pada tingginya
ripple torsi dan noise. Aplikasi yang tidak sensitif pada
pengurangan ini, seperti pada alat rumah tangga ialah cocok untuk
mesin ini.
Gambar 10 SRM satu fasa dengan magnet permanen untuk mengijinkan
starting
3.3 SRM LINIERMotor reluktansi switched linier (LSRM) merupakan
pasangan dari SRM berputar. Faktanya, motor reluktansi switched
linier diperoleh dari pasangan berputarnya dengan memotong poros.
Gambar 11 menunjukan konfigurasi dari LSRM tiga fasa
Gambar 11 motor reluktansi switched linier tiga fasa
IV. SISTEM PENGGERAK SRMSistem penggerak SRM ditunjukan pada
gambar 12. Dibuat dari 4 komponen dasar yaitu konverter daya,
kontrol sirkit logika, posisi sensor, dan motor reluktansi
switched
Gambar 12 Struktur sistem penggerak SRM
4.1 KONVERTER DAYA UNTUK SRMSejak torsi penggerak SRM tidak
tergantung pada polaritas arus eksitasi, penggerak SRM membutuhkan
hanya satu saklar tiap fasa kumparan. Lebih lagi, tidak seperti
penggerak motor ac, penggerak SRM selalu memiliki kumparan fasa
yang seri dengan saklar. Jadi, pada kasus gangguan shoot-through,
induktansi dari
kumparan membatasi rating dari kenaikan arus dan menyediakan
waktu untuk memulai proteksi. Selanjutnya, fasa-fasa dari SRM ialah
independen dan pada kasus gangguan satu kumparan, operasi yang
terganggu ialah mungkin.
4.1.1 KONVERTER JEMBATAN ASIMETRISPada gambar 13a menunjukan
konverter jembatan asimetris. Menghidupkan dua saklar daya pada
tiap fasa akan mensirkulasikan arus pada fasa SRM tersebut. Jika
arus naik diatas nilai yang diperintahkan, saklar akan off. Energi
yang tersimpan pada kumparan motor fasa akan menjaga arus pada arah
yang sama sampai habis. Bentuk gelombang ditunjukan pada gambar 13b
dan c dengan strategi pensaklaran yang berbeda
Gambar 13 Konverter asimetrik untuk SRM dan operasi bentuk
gelombang
4.1.2 KONFIGURASI PENSAKLARAN (N+1) DAN DIODAPenggunaan
peralatan daya ialah rendah pada
konverter jembatan asimetrik. Topologi konverter yang lebih
efisien ditunjukan pada gambar 14, disebutkan konfigurasi saklar
(n+1) dan dioda. Ketika T1 dan T2 dihidupkan, fasa A dienergize
dengan menerapkan sumber tegangan pada kumparan fasa. Arus dapat
dibatasi sampai tingkat tertentu dengan mengendalikan T1 atau T2
atau keduanya. Sama halnya, fasa B dapat dienergize dengan T2 dan
T3. Manfaat dari konverter ini ialah penggunaan daya yang lebih
tinggi karena operasi saklar bagi. Namun, sirkit menyediakan
pengontrolan arus terbatas selama arus fasa lebih
Gambar 14 Topologi konverter pensaklaran (n+1)
4.1.3 TOPOLOGI PENGGERAK TIPE BIFILARGambar 15a menunjukan
konfigurasi konverter
dengan satu saklar daya dan satu dioda tiap fasa tapi regenerasi
energi magnetik yang disimpan pada sumber. Dicapai dengan memiliki
kumparan bifilar dengan polaritas seperti ditunjukan pada gambar.
Bentuk gelombang variasi waktu dari rangkaian ditunjukan pada
gambar 15b. Ditunjukan bahwa tegangan pada saklar daya dapat lebih
tinggi dari sumber tegangan. Kelemahan dari penggerak ini ialah SRM
membutuhkan kumparan bifilar yang meningkatkan kompleksitas dari
motor.
Gambar 15 Penggerak tipe bifilar dan bentuk gelombang
4.1.4 KONVERTER C-DUMPKonverter C-dump ditunjukan pada gambar
16a dengan rangkaian energi pemulihan. Energi magnetik yang
disimpan sebagian dialihkan ke kapasitor Cd dan dipulihkan darinya
oleh chopper kuadran satu yang terdiri dari Tr, Lr dan Dr dan
dikirim ke sumber DC. Gambar 16b menunjukan bentuk gelombang dari
konverter ini.
Konfigurasi ini memiliki keunggulan dari saklar-saklar daya
minimum yang mengijinkan pengontrolan arus fasa independen.
Kelemahan utama ialah komutasi arus dibatasi dengan perbedaan
antara tegangan Cd, Vo dan tegangan hubung DC. Selanjutnya, energi
bersikulasi antara Cd dan hubung DC menghasilkan rugi-rugi tambahan
dalam mesin.
Gambar 16 Konverter C-Dump untuk SRM
4.2 POSISI SENSORPada penggerak SRM, posisi rotor sangat penting
untuk komutasi fasa stator dan pengendalian sudut. Posisi rotor
biasanya diperoleh dari posisi sensor. Penggunaan umum sensor
posisi ialah fototransistor dan fotodioda, element Hall, sensor
magnetik, encoder pulsa dan transformator differensial
variable.
4.2.1 SENSOR FOTOTRANSISTORSensor fototransistor berdasarkan
pada prinsip fotoelektrik. Gambar 17 menunjukan struktur dasar dari
sensor fototransistor
Gambar 17 Sensor fototransistorSeperti yang ditunjukan pada
gambar, shutter berputar sudut elektris 120 dipasang pada poros
rotor, yang berputar dengan rotor SRM. Fototransistor yang sama
dengan jumlah motor fasa (terdapat tiga fasa pada gambar)
ditetapkan pada stator. Ketika celah sejajar dengan fototransistor
PT1, fototransistor akan menghasilkan arus karena cahaya sedangkan
fototransistor PT2 dan PT3 hanya memiliki arus bocor yang kecil
karena cahaya di tutupi oleh shutter yang berputar. Pada kasus ini,
fasa stator berhubungan dengan PT1 harus di aktifkan. Situasi yang
sama akan terjadi ketika celah dari shutter yang berputar sejajar
dengan PT2 atau PT3.
4.2.2 SENSOR POSISI HALLFungsi dari sensor Hall berdasarkan pada
prinsip efek Hall yang dinamai setelah penemunya E.H. Hall: berarti
bahwa tegangan yang dibangkitkan melintang dengan arah aliran arus
pada konduktor elektrik (tegangan Hall), jika medan magnet
diterapkan tegak lurus dengan konduktor
Gambar 18 Sensor posisi Hall
Struktur dari sensor posisi Hall untuk motor tiga fasa
diillustrasikan pada gambar 18. Terdiri dari tiga komponen Hall dan
piringan putar dengan magnet permanen yang tetap pada poros rotor.
Mirip dengan celah dari sensor fototransistor, magnet permanen pada
piringan putar dipasang sesuai sehingga keluaran dari komponen Hall
dapat mengindikasi posisi rotor yang tepat untuk pengendalian arus
fasa.
V. KESIMPULANBerdasarkan materi pada makalah ini, maka dapat
disimpulkan beberapa hal sebagai berikut:
1. Pada motor reluktansi switched memiliki efisiensi dan
kehandalan tinggi dibandingkan dengan konvensional motor AC atau
DC
2. Pada motor reluktansi switched efektif dalam biaya
dibandingkan dengan motor DC brushless pada volume tinggi.
3. Pada motor reluktansi switched memungkinkan biaya rendah
untuk kontrol kecepatan akurat jika volume cukup tinggi.
4. Torsi atau produksi gaya pada motor reluktansi switched
dikembangkan dari variasi energi magnetik yang tersimpan sebagai
fungsi dari posisi rotor
5. Pengendalian SRM 8/6 pada empat kuadran menggunakan analisis
linier telah dijelaskan dengan menggunakan algoritma yang didesain
dan diimplementasikan dengan tujuan untuk mengurangi torsi
ripple
6. Produksi torsi pada struktur motor reluktansi switched datang
dari kecenderungan dari kutub rotor yang sejajar dengan kutub
eksitasi stator.
7. SRM memiliki kutub menonjol ganda dan karateristik magnetik
non-linier, ripple torsi lebih besar daripada motor
tradisional.
8. Dengan pengendalian torsi dari SRM, ripple torsi rendah,
pengurangan noise atau bahkan peningkatan efisiensi dapat
dicapai.
DAFTAR PUSTAKAMagnetic Bearing," in Proc. PEC Tokyo, pp.919-926,
1990.
2. Bass, J. T., Ehsani, M. and Miller, T. J. E ; "Robust torque
control of a switched
BIOGRAFI
Oktarico Susilatama P, NIM 21060110141053, lahir di kendal, 22
Oktober
1992, menempuh pendidikan di SMPN 1
Semarang, SMAN 3
Semarang. Dan sekarang sedang menempuh S1 di
reluctance motor without a shaft positionsensor," IEEE
Transactions, Vol.IE-33, No.33, 1986, 212-216
3. Byrne, J. V. and Lacy, J.G.;
"Characteristics of saturable stepper and reluctance motors."
IEE Conf. Publ. No.136,Small Electrical Machines, 1976,
93-96.
4. Davis, R. M., "A Comparison of Switched Reluctance Rotor
Structures," IEEE Trans. Indu. Elec., Vol.35, No.4, pp.524-529,
Nov. 1988.
5. D.H. Lee, J. Liang, T.H. Kim, J.W. Ahn, "Novel passive boost
power converter for SRdrive with high demagnetization voltage",
International Conference on Electrical Machines and Systems, 2008,
pp.3353-3357, 17-20 Oct. 2008.
6. D.S. Schramm, B.W. Williams, and T.C.
Green; "Torque ripple reduction of switched reluctance motors by
phase current optimal profiling", in Proc. IEEE PESC' 92, Vol. 2,
Toledo, Spain, pp.857-
860, 1992 .
7. R. Krishnan, Switched Reluctance MotorDrives: Modelling,
Simulation,Analysis, Design, and Applications, CRC Press, 2001
8. Theodore Wildi, Electrical Machines, Drives andPower Systems
3rd,Prentice Hall Inc, New Jersey,1997.
9. T. J. E. Miller, Switched Reluctance Motors and Their
Control, Magna Physics Publishing and Clarendon press, Oxford,
1993
Teknik Elektro Universitas Diponegoro.
1.A. Chiba,K. Chida and T. Fukao,"Principlesand Characteristics
of aReluctanceMotor with Windings of