-
8/18/2019 16P Kinetics Rigid Bodies
1/12
-
8/18/2019 16P Kinetics Rigid Bodies
2/12
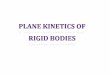
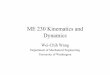
1. In the mechanism shown, the flywheel has a mass of 50 kg and
radius of gyration
about its center of 160 mm. Uniform connecting rod AB has a mass
of 10 kg. Mass of the
piston B is 15 kg. Flywheel is rotating by the couple T ccw
at a constant rate 50 rad/s.When θ=53o determine the angular
velocity and angular acceleration of the connecting
rod AB (ωAB ve αAB). What are the forces transmitted by the
pins at A and B? Neglect the
friction. Take sin 53=0.8, cos 53=0.6.
-
8/18/2019 16P Kinetics Rigid Bodies
3/12
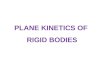
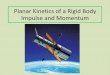
2. Crank AB rotates with an angular velocity of
ωAB = 6 rad/s and angular acceleration of
αAB=2 rad/s2 , both in counterclockwise direction. Roller
C can slide along the circular
slot within the fixed plate. For the position shown, angular
velocity and angular
acceleration of rod BC are ωBC =2.9 rad/s
(counterclockwise) and αBC=37.5 rad/s2
(counterclockwise). The masses of uniform
bars AB and BC are mAB=2 kg and mBC=5
kg.
Mass of the roller C and friction can be neglected.
Determine the reactions supported by
the pins B and C ?
ωAB = 6 rad/s
αAB=2 rad/s
2
mAB=2 kg
ωBC =2.9 rad/s (ccw) , αBC=37.5 rad/s2 (ccw)
mBC=5 kg
A
B
C
37o 45o
LBC
=500 mm L AB=300 mm
r =150 mm
-
8/18/2019 16P Kinetics Rigid Bodies
4/12
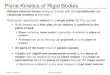
3. Member AO is rotating at a
constant angular velocity of ω AO =5 rad/s in
ccw direction by a torque
T =10 N.m. The mass of the uniform slender bar
AO is 2 kg. Bar AB has a mass of 5 kg
and a radius of
gyration with respect to its mass center G of 400
mm. For the position shown, angular velocity and
angular acceleration of rod BC are ω AB
=1.19 rad/s (counterclockwise) and α AB
=11.79 rad/s2
(counterclockwise). Gear D can be assumed as a uniform thin
disk with the radius of R=0.3 m. Its mass
is 8 kg and it rotates with an angular velocity of 7.93 rad/s in
counterclockwise direction and an
angular acceleration of 5.67 rad/s2 in clockwise
direction. Determine the reactions supported by the
pins A and B and contact point C .
-
8/18/2019 16P Kinetics Rigid Bodies
5/12
4. The masses of uniform bars AB and BC are
mAB = 2 kg and mBC = 1 kg, respectively. Bar BC
is pin connected to a fixed support at C . Bar
AB is pin connected at A to a uniform wheel
of
radius R = 0.50 m and mass mw
= 5 kg. At the instant shown, A is vertically
aligned with O,
bar AB is horizontal and bar BC is
vertical. For the given instant, bar BC is rotating
with an
angular velocity of 2 rad/s and an angular acceleration of 1.2
rad/s2, both in clockwise
direction. Assuming that the wheel rolls without slipping,
determine the force P that is
applied to the wheel. Also determine the coefficient of friction
between the wheel and the
surface.
C
0.95 m
1.25 m
A
B
OP
R = 0.50 m
r
ωBC=2 rad/s
αBC=1.2 rad/s2
-
8/18/2019 16P Kinetics Rigid Bodies
6/12
C
0.95 m
1.25 m
A
B
O
P
R = 0.50 m
r
ωBC=2 rad/s
αBC=1.2 rad/s2
D
( ) i. j.k r vvv
C / B BC C / BC B
919502 =×−=×=+= ω
( ) j.i.i.k i.r vvvv
AB AB B / A AB B B / A B A
ω ω ω 2519125191 −=−×+=×+=+=
( ) i. j.k r vvv
w D D / Aw D / A D A
ω ω ω 950950 −=×=×=+=
(1)
(2)
(1) = (2) 02 =−= ABw s / rad
ω ω
-
8/18/2019 16P Kinetics Rigid Bodies
7/12
C
0.95 m
1.25 m
A
B
O
P
R = 0.50 m
r
ωBC=2 rad/s
αBC=1.2 rad/s2
D
( ) ( ) ( ) ( )
j.i. j.k . j.k k r r aaa
C / B BC C / B BC BC C / BC B
831419502195022 −=×−+×−×−=×+××=+=
α ω ω
( ) j. j.i.i.k j.i.aaa
AB AB B / A B A
α α 2518314125183141 −−=−×+−=+=
( ) ( ) ( ) ( ) ( )
i. j.i. j.k j.k k i.aaa
wwwwO / AO A
α α α α 45081504504502250
+−=×−+×−×−+=+=
(3)
(4)
(3) = (4)22
6121 s / rad .s / rad .
ABw −== α α
{ }02 =−= ABw ,s / rad
ω ω
-
8/18/2019 16P Kinetics Rigid Bodies
8/12
C
0.95 m
1.25 m
A
B
O
P
R = 0.50 m
r
ωBC=2 rad/s
αBC=1.2 rad/s2
D
( ) ( )
y x aa
G j.i. j.k . j.k k a
915704750214750221 −=×−+×−×−=
B
C
G1
C x
B x
B y
C y
mBC g
≡
B
C
G1 x BC am
y BC am
BC BC I α
( )( ) 2
22
07520950112
1
12
1
mkg..lm I BC BC BC
⋅===
( ) ( )( )( ) ( )( )
N . B
..... B
I d am M
x
x
BC BC x BC c
380
210752047505701950
=
+=
+=∑ α
+
m AB = 2 kg
mBC = 1 kg
mw = 5 kg
G1
-
8/18/2019 16P Kinetics Rigid Bodies
9/12
C
0.95 m
1.25 m
A
B
O
P
R = 0.50 m
r
ωBC=2 rad/s
αBC=1.2 rad/s2
D
( )
y x aa
B / G BG j.i.ik . j.i.aaa
821410625618314122 −=−×−+−=+=
A G2 A x B x =0.38 N
B y A y m AB g
≡ B x ABam
y ABam
AB AB I α
( )( ) 222 260251212
1
12
1mkg..lm I
AB AB AB
⋅===
( ) ( )( )( ) ( )( )( ) ( )( )
N . A
....... A I d am M
y
y AB AB AB B
347
61260625082262508192251
=
+−=−⇒+=∑ α +
m AB = 2 kg
mBC = 1 kg
A G2 B
( )( ) N . A. B AamF
x x x x BC x 6621412
=⇒=−=∑
( )( )
( )( ) ( )( )
N . B
.. B.
.gm B A
amF
y
y
AB y y
y BC y
686
8228192347
822
−=⇒
−−−
−=−−
=
=
∑
mw = 5 kg
G2
{ }0= ABω
B y
-
8/18/2019 16P Kinetics Rigid Bodies
10/12
C
0.95 m
1.25 m
A
B
O
P
R = 0.50 m
r
ωBC=2 rad/s
αBC=1.2 rad/s2
D
( )( ) i.i..aao
605021 ===
A
A x
A y
mw g
≡ ww I α
( )( ) 222 62505052
1
2
1mkg..r m I www ⋅===
( ) ( ) ( )( )( ) ( )( )
N .P
.....P. A
I d am M
x
www D
5549
2162505060550950
=
+=+−
⇒+=∑ α
+
m AB = 2 kg
mBC = 1 kg
( )( )
N .F
.F P AamF
f
f x xw x
8943
605
=⇒
=−+−=∑
N . N
gm N AF w y y
3956
00
=⇒
=−+−⇒=∑
mw = 5 kg 06903956
8943.
.
.
N
F f ===µ
O
P
N
F f
O amw
D
-
8/18/2019 16P Kinetics Rigid Bodies
11/12
5. The unbalanced 20 kg wheel with the mass center at G
has a radius of gyration
about G of 202 mm. The wheel rolls down the 20o
incline without slipping. In the
position shown. The wheel has an angular velocity of 3 rad/s.
Calculate the friction
force F acting on the wheel at this position.
-
8/18/2019 16P Kinetics Rigid Bodies
12/12
SOLUTION
“General Motion”
FBD
N
mg
Ff
KD
=
am
α I
222 816.0)202.0(20 kgmk m I
===
α α 25.0== r ao x x
y
( ) ( )( ) jia
ik k ik iaaa
y xaa
G
OGOG
075.0675.025.0
075.033075.025.0/
−+−=
−××+−×+−=+=
α
α α
( ) ( )604805
67502502020
.F ..F sinmgamF
f
f xef x
=+
+−=+−⇒=∑
α
α
( )
α
α
51367184
07502020
.. N
.cosmg N amF yef y
−=
−=−⇒=∑
( ) α α 81602500750
.).(F ).( N I M
f ef G =+⇒=∑
N . N
N .F
s / rad .
f
971160
6172
59715 2
=
=
=α