Embed Size (px)
Citation preview

PLEASE SCROLL DOWN FOR ARTICLE
This article was downloaded by: [Canadian Research Knowledge Network]On: 22 September 2010Access details: Access Details: [subscription number 918588849]Publisher Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
Vehicle System DynamicsPublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713659010
Extended Ground-Hook - New Concept of Semi-Active Control of Truck'sSuspensionM. Valášek; M. Novák; Z. Šika; O. Vaculína
a Department of Mechanics, Czech Technical University, Faculty of Mechanical Engineering, Praha 2,Czech Republic
To cite this Article Valášek, M. , Novák, M. , Šika, Z. and Vaculín, O.(1997) 'Extended Ground-Hook - New Concept ofSemi-Active Control of Truck's Suspension', Vehicle System Dynamics, 27: 5, 289 — 303To link to this Article: DOI: 10.1080/00423119708969333URL: http://dx.doi.org/10.1080/00423119708969333
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial orsystematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply ordistribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae and drug dosesshould be independently verified with primary sources. The publisher shall not be liable for any loss,actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directlyor indirectly in connection with or arising out of the use of this material.

Vehicle System Dynamics, 27 (1997), pp. 289-303 0042-3 1 14/97/2705-289$12.00 O Swets & Zeitlinger
Extended Ground-Hook - New Concept of
Semi-Active Control of Truck's S~~spension
M. VALASEK, M. N O V ~ , Z. SIKA and 0. VACUL~N '
SUMMARY
This paper deals with the novel control concept, so called ground-hook for active and mainly semi-active suspension of vehicles with the ultimate objective to minimize the tyre-road forces and thus the road damage. The basic ground-hook concept is extended to the several variants which enable to decrease criteria of road damage as well as to increase driver's comfort for a broad range of road unevennesses. Parameters of control law are determined by the parameter optimization for generally nonlinear model. The influence and interaction of the damping rate limits and time constants of variable shock absorbers are also taken into account. The influence of implementation of more complicated truck models is also discussed.
1. INTRODUCTION
Active and semi-active damping of vehicle suspensions has been studied for a long time (e.g. [l-51 and others). The applied performance criterion in these studies has been mostly the ride comfort. The important principle of the so called sky-hook for such control of vehicle suspension has been developed by Karnopp [I]. He analyzed linearized low order dynamic models of road vehicle suspension systems incorporating generalized velocity feedback for the performance criterion of ride comfort. The sprung mass velocity feedback is called sky-hook as a fictitious damper between the sprung mass and the inertial frame ('the sky').
Despite many different theories of the optimal suspension control the sky-hook control concept is generally used for two different purposes: as the ideal control concept for comparison of other approaches and as the basis of practical imple- mentation of semi-active or active vehicle suspensions.
Besides ride comfort the other important criterion is the interaction between the vehicle and the road. This criterion is important for ride safety and for road friendliness. In both cases the goal is to minimize the amplitudes of dynamic tyre-road forces [5,12]. The novel control concept, the so called ground-hook, as a fictitious damping element between the wheel and the ground parallel with the tyre has been introduced [7,8]. The motivation of this concept is to develop an
I Czech Technical University, Faculty of Mechanical Engineering, Department of Mechanics. Karlovo nAm. 13, 121 35 Praha 2, Czech Republic.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

equivalent of sky-hook for the reduction of dynamic tyre-road forces. The preservation of low accelerations of sprung mass has been reached by the combination of sky-hook and ground- hook and ground-hook extensions.
The equivalent concept has been recently independently introduced in [6] for reduction the undamped vibrations of unsprung mass in active systems and in [3] as road-hook for general improvement of active suspension control. However, none of these approaches have considered the reduction of tyre-road forces or the combination with the sky-hook concept.
The basic ground-hook concept has been then extended to the several variants and implemented to the semi-active suspension. The suitable choice of control law structure and parameters enables to decrease criteria of road damage as well as to increase driver's comfort for a broad range of road unevennesses. Parameters of control law are determined by the minimization of integral performance criterion which considers the time behaviour of dynamic tyre-road forces. The influence and interaction of the damping rate limits and time constants of variable shock absorbers are also taken into account.
Section 2 deals with the ground-hook concept itself and its extensions. The determination of control parameters and the simulation results are described in Section 3. The initial results of further development of ground-hook concept are treated in Section 4 and the conclusions follow in the last section.
2. THE CONCEPT OF GROUND-HOOK AND ITS EXTENSIONS
The principle of ground hook as a fictitous damper between the wheel and the ground of the road has been proposed in [7]. This principle can be further extended [8]. The further considerations are based on the simple linear quarter car model.
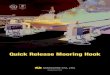
The model of a linear quarter car model is in Fig. 1. The equations of motion are
where m , is the unsprung mass, m, is the sprung mass, k,, is the stiffness of main spring, k,, is the stiffness of tyre, b,, is tyre damping constant and F, is the
Fig. 1. Quarter car model.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

EXTENDED GROUND-HOOK 29 1
force of passive or semi-active damper or active element. The meaning of kinematic quantities z,, z, and 2, is also clear from this figure.
The principle of extended ground-hook has been developed from the following considerations. The tyre-road force is given as
The damping of the tyre b,, has a very low values in the case of normal working velocities of trucks and thus can be neglected. The desired performance is to keep F,, value as small as possible. This can be achieved either by keeping the deformation (z, - 2,) small or by keeping the stiffness rate k,, small. Keeping of z, - z, small leads to the idea of ground-hook as fictitious damper b, in Fig. 2a. Keeping of k,, small leads to the extending idea of canceling the tyre stiffness by fictitious stiffness A k ,,.
2.1. Combination of Ground-Hook and S ky-Hook for Active Element On the suspension systems two main requirements are laid: (i) to keep acceleration of the sprung mass in reasonable limits from the point of
view of driver and a transported load, and, (ii) to minimize the amplitudes of tyre-road contact forces.
These two requirements are conflicting in general and when designing a passively damped suspension we have always been faced with a compromise, represented by a choice of such a shock absorber, and a spring as well, with which the suspension meets, less or more, the mentioned requirements.
An ideal system, the sprung mass of which is joined through a fictitious damping b, to the basic inertial frame, is nowadays already classical sky-hook (Fig. 2a). The aim of that system is to slow down velocity or acceleration of a sprung mass and to improve the driver's comfort.
Fig. 2. Combination of sky-hook, ground-hook and passive suspension (a) ideal concept. (b) realization of concept.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

Similarly for the reduction of wheel-road contact forces a fictitious damping b, between the wheel and the ground has been proposed [7,8] (Fig. 2a) in order to keep the wheel-road contact forces in a band as narrow as possible around a static value, given by the mass and loading of the vehicle. Lowering an amplitude of these forces influences vehicle safety. Large fluctuation of these forces may result in the lost of tyre-road contact and adhesion and, as a result, in the lost of vehicle maneuverability. However, the authors of this paper have been rather led by an effort to minimize these forces from the point of view of road surface damaging by heavy trucks.
Further we will concern with a real system incorporating an active element. This element F, is, of course, located between sprung and unsprung masses, i.e. on the place of a passive shock absorber (Fig. 2b). This active element has the following structure of the force law for combination of ground-hook and sky-hook
The frequency response of the transfer functions for acceleration of the mass m, and the force to the road are graphically represented in Fig. 3. On these graphs the frequency response of the passive system is plotted, too. When the constants b,, b2 and b,, in the rule for the force of an active element are appropriately chosen, a decrease of amplitudes of forces towards the road can be seen in the
Fig. 3. Comparison of frequency response plots of passive system and the active system.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

EXTENDED GROUND-HOOK 293
whole range of exciting frequencies taken into account. Sprung-mass acceleration in the range of frequencies 0.5-10.5 Hz is also lower than in the case of the passive system. This frequency range is, from the point of view of effects on driver, the most important, which is also considered in the pertinent stacdards (ISO).
The results of application of this principle are very good for harmonic excitation but not so good for excitation by a bump [8]. This was a reason for the development of so called extended ground-hook principle.
2.2. Extension of Ground-Hook Concept for Active :Element The extended ground-hook should especially work in cases when the deforma-
tion z , - 2, is unavoidable, like passing a bump. During passing an accidental bump the relative velocity i, - i, is at the beginning zero and therefore the ground-hook could not influence the car behaviour in the first phases of bump passing. The possibility of the improvement of this problem arises from the above mentioned idea of canceling the tyre stiffness by the fictitious stiffness A k ,,. This extension can be further generalized.
Let us derive the equations of motion for the deformation z, - 2,. Modifying equations (1-2) we obtain
In order to keep the deformation z, - zo small the idea of decreasing k,, arises. It leads to the idea of canceling the suspension stiffness by fictitious stiffness Ak,,. This should work especially in cases when the deformation z, - z, is unavoidable, again like passing a bump.
Finally we obtain force law for the extended combination of ground-hook and sky-hook
This final variant contains all terms of the full state feedback with the exception of one absolute position term like z,, z, or 2,. The advantage of the last equation is that all terms are either directly measurable or reconstructable from other measure- ments.
Directly we can measure z, - z,. The velocities i, and i2 are observable from the measurements of accelerations z,, z,. By adding the equations (1) and (2) we obtain the tyre-road force (3)
F,, = m,z , + m2z2. (7)
If the tyre damping b,, is neglected, the tyre deformation z, - z, can be solved from equation (3) and by differentiation we obtain the last term z, - z,.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

3. CONTROL SYNTHESIS FOR SEMIACTIVE SUSPENSION
The desired force of an active element is the basis for the real semi-active device. The damping rate of variable shock absorber can be set to the positive values from the interval [b,,, b,,,]. The variable shock absorber is set to the damping rate bsa which gives the force value nearest to the desired one
if Fael s bmin(z2 - z,)
act
bsa = { z2 - 2, if brmn(i2 - i,) s Fact 5 bmax(i2 - 2,) .
The further described simulations have been done on the linear quarter car model with linear passive or variable shock absorber, however with possible different setting for compression and expansion. This model has been developed as a simplified model of SKODA-LIAZ truck prototype used within Copernicus project "Semi-Active Damping of Truck's Suspension and Its Influence on Driver's and Road Loads'' (SADTS). The parameters of this model are m, = 1500 kg, m, = 1 1500 kg, k 1 2 = 628000 N/m, k,, = 3520000 N/m, b,, = 0.
3.1. Parameter Determination By the change of parameters b, , b,, b,, , A k ,,, A k , z we can obtain in large extent modified transfer functions of the system in Fig. 1. For the systematic determina- tion of these parameters we have applied the optimization procedures from the program packet UFO [9]. The input disturbance has been a cosinusoidal bump and the performance criterion was the time integral of dynamic tyre force
The results of such optimization are on the Fig. 4 where the non-optimized passive, optimized semi-active and active suspension responses of tyre-road force to the cosinusoidal bump are described. These results confirm the development of extended ground-hook principle. However, the behaviour of semi-active suspen- sion is much worse. This demonstrates that there is substantial difference between the response to bump by active and semi-active suspension. The reason is that the semi-active suspension is not capable to actively move the wheel into the chassis while passing the bump, because it requires the input of energy, but the active suspension can do it.
Semi-active suspension has been optimized for different values of damping rate limits (b,,,, b,,,). The first result has been that the value bmin = 0 causes the integration instability which has been removed by values bfin = 10 Ns/m and bmaX = 1000000 Ns/m.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

EXTENDED GROUND-HOOK 295
-0.08' I I I I I I I I I
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 Time [s]
Fig. 4. Response to cosinusoidal bump of optimized active and semi-active and non-optimized passive system.
The second result has been that the time constant of variable shock absorber dynamics influences the result dramatically especially if the value b ~ , is a smalI one, e.g., if the time constant is 10-30 ms and bdn = 10. The reason is following. If the variable shock absorber is in a time instance set to the minimum value where its damping influence is minimum, then its switching to a value with efficient damping influence requires significant time 10-30 ms during which the suspension is almost undamped. In some cases it decreases the properties of semi-active suspension below the passive one.
The solution is clear from the previous analysis. If there is the time constant it is necessary to increase the minimum value b ~ , to a certain level. We have considered the time constant 10 ms and b,, equal to 1000 or 60000 Ns/m.
From the computational experiments we have also detected that there is significant influence of the upper level of damping rate b,, to the results of suspension response. The reason is that it directly determines the damping output of the device what is its primary function. The higher value of b,,,, the better response results. We have considered high, but realistic value b,,, = 300000 Ns/m.
3.2. Simulation Results The optimized parameters of control law for the variable shock absorber
(Ak,, = - 500000 N/m, Ak,, = - 100000 N/m; for b,,, = 1000 Ns/m b, =
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

73445 Ns/m, b,, = 1201 1 Ns/m, b, = 38 180 Ns/m; for b,,, = 60000 Ns/m b, = 75687 Ns/m, b,, = 3252 Ns/m, b, = 32430 Ns/m) and damping rates (b,,,, = 1661 21 Ns/m, be,, = 58888 Ns/m) of passive shock absorber have been further implemented in the Simpack-Simulink [10,11] integrated simulation envi- ronment. The behaviour of these shock absorbers are further compared with the behaviour of the linearised passive commercial shock absorber and variable shock absorber of nonzero time constant.
Further the following symbols are used Passive commercial shock absorber COM Passive optimized shock absorber PA0 Semi-active ideal shock absorber (with zero time constant) SAI Semi-active real shock absorber (with 10 ms time constant) SAR
The obtained devices have been then tested on the responses to the cosinusoidal bump, cosinusoidal pot, bad, medium and very good stochastic roads, sinusoidal disturbance of 20 Hz, 10 Hz, 2 Hz and 1 Hz. The Dynamic Load Stress Factor (DLSF) [5] is taken as an evaluation criterion of the road damage
DLSF = 1 + ~ D L C , + ~ D L C ~ , ( lo)
where DLC (Dynamic Load CoefJicient) is
RMS dynamic tyre force DLC =
static tyre force (1 ' )
The IS0 weighted acceleration RMS is used for the health comfort criterion. The main results are in Fig. 5-1 1.
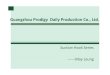
The influence of the parameter bmi, equal to 1000 or 60000 for the passing through the bump is in Fig. 5. It demonstrates that
the smaller b,,, , the better SAI response, the smaller b,,,, the worse SAR response, the nonzero time constant of variable shock absorber makes it on the bump worse than the passive shock absorber optimized for this bump. The results have shown that the DLSF response in all cases with the exception
of sinusoidal excitation 1-2 Hz are best for SAI and SAR suspensions. A little different results are for sinusoidal excitation 2 Hz where commercial shock absorber is the best if very small b ~ , = 1000 is not used. For sinusoidal excitation 1 Hz the best is the PA0 suspension.
The results have shown that even acceleration RMS for the health comfort criterion are for majority disturbances quite well despite the comfort has not been optimized at all. From this point of view the results for stochastic roads where the SAR suspension has been the best are important. These results could be interpreted that the extended combination of ground-hook and sky-hook at the steady state solves the requirement for decrease of tyre-road forces and supporting driver's comfort for the necessary extent of road excitations.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

EXTENDED GROUND-HOOK
6 i I I 1 1
. . . . . . . . . . . . . . . . . - b-max = 300000 Nsfm
. . . . . . . .
. . . .. . . .
0 0.1 0.2 0.3 0.4 0.5 0.6 Time [s]
b-min = 60000 Nslm .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
b-max = 300000 Nslm
- d
2 - -
1 0 0.1 0.2 0.3 0.4 0.5 0.6
Time [s]
Fig. 5. Response to cosinusoidal bump, the influence of b,,.
I I I I I - P)
1 - a u 4l E a, .-
2 0.5 - - 0 tn B
0 - 0 0.1 0.2 0.3 0.4 0.5 0.6
Time [s]
1 ,
. . . . -
. . . . . . . . . . . . . . . - . . . . . . .
COM . . . . . . . . . . . . . . . . . . . SAR- -
PA0 I I I I SAl
0.1 0.2 0.3 0.4 0.5 0.6 Time [s]
Fig. 6. Response to cosinusoidal bump.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

. . . . . . . 'c1 COM
a 1 - E .-
. . . . . . . . . . .
V)
1 I I I I i I I 1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 Time [s]
'0 0.1 0.2 0.3 0.4 0.5 0.6 Time [s]
Fig. 7. Response to cosinusoidal pot.
0 I I I I I I I I 1 0 1 2 3 4 5 6 7 8 9 10
Time [s]
11 I I f I I I I I I I
0 1 2 3 4 5 6 7 8 9 10 Time [s]
Fig. 8. Response to very good stochastic mad.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

EXTENDED GROUND-HOOK
1.5 I I r I I I I 1 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . - SA l
: SAR . . . . . . . . . . . . . . . . . . 'COM , . ' '
-
I I
3.5 4 4.5 Time [s]
10 1 I I I I I
I . . . . . . . . . . C O M . . . -
- SAR SAI
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -
I I I I I I 0 1 2 3 4 5 6
Time [s]
Fig. 9. Response to sinusoidal disturbance 10 Hz.
2 I I I 1 1 I 1 I
. . ' 'C.o M . " ' " "
. . . . . ,-
Time [s]
0 1 2 3 4 5 6 Time [s]
Fig. 10. Response to sinusoidal disturbance 2 Hz.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

4. DIRECTIONS OF FUTURE DEVELOPMENT
Further investigations will be devoted to the optimization of control law coeffici- ents for the more complex simulation models of truck. The first comparisons of behaviour of different levels of truck model with regard to the investigated criteria are quite optimistic.
Firstly the parameters determined by the above described optimization procedu- re have been used for the simulation with the quarter car model equipped by the nonlinear devices (variable shock absorbers, springs, tyres). The first simulation results were very bad with no improvement by SAI or SAR suspensions. After careful analysis we have concluded that the influence of nonlinearity of spring elements is negligible and the decisive influence is done by the shock absorber. The problem is that the unsymmetrical shock absorber does not have enough dissipative output in both compression and expansion phases. If we applied the symmetric variable shock absorber with enough large dissipative output the promissing results from linear simulations have been also obtained with nonlinear simulations (see Fig. 12 in comparison with Fig. 6).
Secondly the same have been realized for the full 3D model of the truck. For these simulations we have used linear shock absorbers directly identical to the devices determined and analyzed for linear quarter car model in Section 3. These linear shock absorbers (SAI, SAR, PAO, COM) have been located between car
I -
0 1 2 3 4 5 6 Time [s]
Fig. I 1 . Response to sinusoidal disturbance 1 Hz.
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

EXTENDED GROUND-HOOK 30 1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 Time [s]
I I I I I I I I I I 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Time [s]
Fig. 12. Response to cosinusoidal bump of nonlinear suspension with nonlinear variable shock absorber.
body and rear driven axle. All of other truck elements have been modeled as nonlinear. The results for passing through cosinusoidal bump are on the Fig. 13 again with promissing results.
The parameters of control law for more realistic models of variable shock absorbers and more complicated truck models must be certainly further tuned. The influences of
properties of real variable shock absorbers structure of vehicle model vehicle model parameter variations input signal reconstruction accuracy
will be considered. In the case of real variable shock absorbers we have at our disposal characteris-
tics which are considerable as linear only for very low relative velocities between car body and axle. Furthermore different time constants for increasing and decreasing of damping rate are present. The nonzero clearance of real damper mounting is able to have influence in the instant of change of damper velocity sign.
The very important question is the sensitivity of control law efficiency to the change of truck model structure and parameters. This is not only question of model accuracy and time requirements of optimization and simulation of very extensive models but also question of the sensitivity to the different loading of real
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

-0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s]
Fig. 13. Response to cosinusoidal bump of nonlinear 3D truck model with linear variable shock absorber.
3
2.5-
U-
2 2- D
1.5
1
truck in practical situations. The final results must be also useful for the broader set of vehicles of different construction (air springs-leaf springs etc.).
Finally, in the case of real feedback loop we will have to reconstruct from measurements instantaneous kinematic quantities necessary for the control law of required damper force.
I I
....:. . .
. . .
-
- I
5. CONCLUSIONS
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s]
The novel control concept, so called extended ground-hook for active and mainly semi-active suspension of vehicles has been described. The developed concept has been proposed for heavy trucks with the ultimate objective to minimize dynamic tyre-road forces and thus the road damages. The basic ground-hook concept is extended to the several variants which enable to decrease criteria of road damage as well as preserve good driver's comfort for a broad range of road unevennesses.
The base of determination of coefficients in control law is done by the parameter optimization for generally nonlinear dynamic model. The minimization of integral objective criterion which considers the time course of dynamic part of tyre-road forces has been applied. The quarter car model equipped with linearised springing elements has been used for optimization and tuning of control law. The
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010

EXTENDED GROUND-HOOK 303
influence and interaction of the damping rate limits and time constants of variable shock absorbers are also taken into account. The influence of implementation of more complicated truck models is finally discussed.
ACKNOWLEDGEMENTS
The authors acknowledge the kind support of this research by EC Copernicus Project SADTS CIPA-CT94-0130 and by the grant of Czech Grant Agency GACR 101 /95/0728.
REFERENCES
1. Karnopp, D., Crosby, M. I., Harwood, R. A.: Vibration Control Using Semi-Active Force Generators, Transactions of ASME, I. of Engineering for Industry, 96 (1974). pp. 619-626
2. Sharp, R. S., Crolta, D. A.: Road Vehicle Suspension System Design - a review, Vehicle System Dynamics. 16 (1987), pp. 167- 192
3. Venhovens, P. J.: Optimal Control of Vehicle Suspensions, PhD Thesis, Delft University of Technology, 1993
4. Elbeheiry, E. M., Karnopp. D. C., Elaraby. M. E., Abdelraaouf, A. M.: Advanced Ground Vehicle Suspension Systems - a Classified Bibliography, Vehicle System Dynamics, 24 (1995). pp. 23 1 -258
5. Yi, K., Hedrick, J. K.: Active and Semi-Active Heavy Truck Suspensions to Reduce Pavement '
Damage, SAE Technical Paper 892486, 1989 6. Edge, C. Y., Tsao, Y. J.: A Fuzzy Preview Control Scheme of Active Suspension for Rough Road,
Int. J. of Vehicle Design, 15 ( 19941, pp. 166- 180 7. ValSek, M., Nova, M.: Ground Hook for Semi-Active Damping of Truck's Suspension, Proc. of
CTU Workshop 96, Engineering Mechanics, CTU Prague, Brno 1996, pp. 467-468 8. Nova. M. and ValSek, M. (1996): A New Concept of Semi-Active Control of Truck's
Suspension, In: Proc. of AVEC 96, Aachen, pp. 141- 151 9. LukSan, L. et al.: UFO - Interactive System for Universal Functional Optimization, lnstitute of
Computer Science of Academy of Sciences of the Czech Republic, Technical Report No.599, Prague 1994
10. Anon.: SlMfACK - User Manual. German Aerospace Research Institute (DLR), Oberpfaffenhofen 1995
I I . Anon.: MATLAB-SIMULINK - User Guides, The Mathworks, Inc., 1995 12. Cebon, D.: Vehicle-Generated Road Damage: A Review, Vehicle System Dynamics, 18 (1989).
pp. 107-150
Downloaded By: [Canadian Research Knowledge Network] At: 20:19 22 September 2010