Embed Size (px)
Citation preview

AD-A132 638 FLIGHT EVALUATION OF A LINEAR OPTICAL DISPLACEMENT 1/LTRANSDUCER(U) ROCKWELL INTERNATIONAL COLUMBUS OH NORTHAMERICAN AIRCRAFT OP.. E 4 SOLOMON MAY 83 NR83H-20
UNCLASSIFIED NAC-TR-2329 N001 3-82-C-0232 F/G 1/4 NL
EEEEIEEEEEEEEEE
mmhhmhhhhhhmmummmmimEmmIIII IIIIIIIIIIsIIIII IIIIIIII

jJ 1.0 *2 1*.5H
IIIII-~ 143M6- -4
1.8
MICROCOPY( RESOLUTION TEST CHARTNATIONA PtRI AU Nl -TANI,.AUR. %

I NAC-TR-2329
I NR83H-20I FINAL TECHNICAL REPORT
~ay 1983
I OF A LINEA OPTCA
Nrt A eIcNEARf OPTI ALII
I4300 East Fifth Avenue EL EC T EPO Box 1259
Columbus, Ohio 43216 SEP 2 71983
ti Lloyd L. KohnhorstErnest J. Solomon
Jeff revC. Price
Approved for Public Release
Distribution Unlimited
I APPLIED RESEARCH DEPARTMENTNaval Avionics Center[ Indianapolis, Indiana 46218

UNCLASSIFIEDSECURITY CLASIFICATION OF THIS PAGE (When Date Entered)
O PTIA D CMENTTNSDCE BEFORE COP.ETING FORME. APOR 7 NUMBER GOVT ACCE$ . ECENT'S CAT ALOG NUMBER
rNAC-TR-23294. TITLE (0nd.ubt~te) YOE OF EPEMT & PERIOD COVERED
RtCFinal ReportFLIGHT EVALUATION OF A LINEAR June 1982 -My1983
OPTICAL DISPLACEMENT TRANSDUCER 4.PROMIGOG REPO.RT NU-SE4
I • | NR83H-207. AUTHOR(a) S. CO(NTRACT OR GRANT NUMBE[R(s)
Ernest J. Solomon | N00163-82-C-0232
9. PErRFORMING ORGANIZATION NAME' AND ADDRESS 10 PROGRAM ELEMENT. PROjECT. TASK t
Rockwell International Corporation | AREA & WORK UNIT NUMBERS
North American Aircraft Operations4300 East Fifth Avenue, Columbus, OH 43216
CONTROLLINGOFFICE NAME AND ADDRESS 12. REPORT DATE
Naval Avionics Center | May 1983Indianapolis, IN 46218 13. NUMBER OF PAGES
t4. MONITORING AGENCY NAME A AODRESS(II different from Controlling Office) I. SECURITY CLASS. (of this report)
Naval Air Systems Command UNCLASSIFIEDAIR-332C __UNCLASSIFIED
Department of the Navy IS. DCLASIF1CATION/DOWNGRADING
Washington,_DC_20361 _SCHEDULE
16. DISTRIBUTION STATEMENT (of this Report)
Tr d ocuM n ; b. h c~p•...
17. DISTRIBUTION STATEMENT (of the abstract entered in &lock 20, if different frtm Report)
II. SUPPLEMENTARY NOTES
I3 19. KEY WORDS (Continue on reveree side itnecessary end iden!ify by block number)
Computer Interface UnitDigital Fly-By-LightLinear Optical Displacement Transducer8000 PSI (55 MPa) Lightweight Hydraulic System
20. ABSTRACT (Contlnu. oteve*e aide f neceerw and identity by block number)The flight demonstration and evaluation of the operation of the MIL-T-85289Linear Optical Displacement Transducer (LODT) as an active sensing unit of theAdvanced Flight Control Actuation System in a T-2C aircraft were successfullyaccomplished. The test i'nstallation contained a LODT as the rudder positionfeedback device, fiber optic link, computer interface unit, microcomputer,direct-drive rudder actuator, electronic drive unit, force transducers, and alocalized 8000 PSI (55 MPa) hydraulic supply. The system met all laboratory andflight test objectives and demonstrated that the LODT represents a viableapproach to EMI immunity in advanced aircraft control systems. r--DD F 1473 EOITION OFI t OV 6S IS BSOLTE UNCLASSIFIED/
i SECURITY CLASSIFICATION OF TNIS/PAGE (10ie., lets Knt*rcf
t4

IiFOREWORD
This report documents the flight evaluation of a prototype MIL-T-85289
Linear Optical Displacement Transducer (LODT) as a rudder actuator feedbackcontrol monitor. The program objective was to collect performance data of the
* flight response using the digital LOOT in place of the analog Linear VariableDisplacement Transducer (LVDT) in the Advanced Flight Control Actuation System(AFCAS) feedback loop. The test flights verified the LOOT performance to be
* highly satisfactory using on-board measurement equipment and telemetry datarelay. The laboratory tests showed the LODT to be very accurate with high sen-sitivity. The aircraft used was the T-2C trainer, Bureau No. 152382, bailed toRockwell from the Naval Air Systems Command (NAVAIR), Washington, DC.
This flight evaluation was accomplished by Rockwell International (NorthAmerican Aircraft Operations) for the Naval Avionics Center (NAC) under Con-tract No. N00163-82-C-0232. The principal investigator was Mr. L. L. Kohnhorstof Rockwell. Funding for this effort was provided by NAVAIR. The NAVAIR tech-nology administrator for this project was Mr. A. Glista, AIR-332C. The programmanager at NAC was Mr. John Cicak, Code 813. The NAC project engineers wereMessrs. Peter Jones and Bruce McCoy, Code 813.
This report has been reviewed and is approved for publication.
BRUCE M. RcCOt /
Project Engineer, Branch 813--
OHN J. C, HeadBranch 8
AMES M BNN reorCommunication Systems Division 810
N77 GFRAUI 7
- A . -_-

ABSTRACT
The flight demonstration and evaluation of the operation of the MIL-T-85289 Linear Optical Displacenent Transducer (LOOT) as an active sensingunit of the Advanced Flight Control Actuation System in a T-2C aircraftwere successfully accomplished. The test installation contained a LODTas the rudder position feedback device, fiber optic link, computer inter-face unit, microcomputer, direct-drive rudder actuator, electronic driveunit, force transducers, and a localized 8000 PSI (55 MPa) hydraulicsupply. The system met all laboratory and flight test objectives anddemonstrated that the LODT represents a viable approach to EMI immunityin advanced aircraft control systems.
2'
2]

j TABLE OF CONTENTS
TITLE PAGE NO.
FOREWORD IABSTRACT 2TABLE OF CONTENTS 3LIST OF FIGURES 5LIST OF TABLES 8
1.1 BACKGROUND INFORMATION 9
1.2 OBJECTIVE 101.3 TECHNICAL APPROACH 10
2.0 T-2C AIRPLANE 13 r2.1 GENERAL DESCRIPTION 132.2 HYDRAULIC SYSTEM 132.3 ELECTRICAL SYSTEM 15
3.0 AFCAS DIRECT DIGITAL DRIVE, LODT FEEDBACK 17TEST INSTALLATION3.1 GENERAL DESCRIPTION 173.2 SYSTEM DESCRIPTION 19
3.2.1 Actuator Position Transducers 193.2.2 LODT Fiber Optic Link 243.2.3 Dual Channel PWM Fiber Optic Links 243.2.4 Computer Interface Unit 243.2.5 Electronic Drive Unit 253.2.6 Pedal Force Transducers 253.2.7 Microcomputer Assembly 253.2.8 Microcomputer Power Supply 283.2.9 AFCAS Actuator 283.2.10 Hydraul ic System 29
3.3 SOFTWARE DESCRIPTION 343.3.1 Function 343.3.2 Program Modules 343.3.3 Flight Test Program Software 36
4.0 LABORATORY TESTS 394.1 TEST OBJECTIVES 394.2 TECHNICAL APPROACH 394.3 INTEGRATION TESTS AND RESULTS 39
4.3.1 Lab Set-Up 394.3.2 LOOT, CIU and Fiber Optic Cable Bench 39
Tests4.3.3 Digital Program and System Operation 42
3

TABLE OF CONTENTS (Cont'd)
TITLE PAGE NO.
4.3.4 System Response Tests 424.3.4.1 DFBL Frequency Response 424.3.4.2 ABU Frequency Response 424.3.4.3 DFBL and ABU Mode Step Responses 424.3.4.4 Linearity 464.3.4.5 Failure Mode Tests 464.3.4.6 Null Currents 46
5.0 FLIGHT TEST PROGRAM 515.1 AIRCRAFT INSTALLATION 51
5.1.1 Continuity and Power Checks 515.1.2 Hydraulic Checks 515.1.3 System Checkout 51
5.2 INSTRUMENTATION 545.2.1 Description 545.2.2 Instrumentation Ground Checkout 54
5.3 FLIGHT PLAN 545.4 FLIGHT TEST RESULTS 57
5.4.1 Flight Program Summary 575.4.2 Telemetry Instrumentation Data 57
6.0 CONCLUSIONS AND RECOMMENDATIONS 73
REFERENCES 75
APPENDICES
A MICROCOMPUTER ASSEMBLY 77
B DIGITAL FLY-BY-LIGHT AFCAS/LODT 87FLIGHT PROGRAM SOFTWARE
C GENERAL TEST PLAN/PROCEDURES FOR 105FLIGHT EVALUATION OF A LINEAR OPTICALDISPLACEMENT TRANSDUCER
LIST OF ABBREVIATIONS 121
SUMMARY OF METRIC CONVERSIONS 125
4
. ... ..... ** ... .. .

I'I LIST OF FIGURES
FIGURE NO. TITLE PAGE NO.
12-I T-2C "BUCKEYE" TRAINER 14
1 3-1 DIGITAL FLY-BY-LIGHT, LINEAR OPTICAL 18DISPLACEMENT TRANSDUCER (LOOT) FEEDBACK,T-2C TEST INSTALLATION - SIMPLIFIEDBLOCK DIAGRAM
3-2 OPERATIONAL MODES, FUNCTIONAL BLOCK DIAGRAM 20
3-3 DIGITAL FLY-BY-LIGHT SYSTEM, T-2C RUDDER 21CONTROL, FUNCTIONAL SCHEMATIC
1 3-4 LINEAR OPTICAL DISPLACEMENT TRANSDUCER 22EQUIPMENTS, MIL-T-85289(AS)
3-5 LINEAR OPTICAL DISPLACEMENT TRANSDUCER, 23CUT-AWAY VIEW
3-6 ELECTRONIC DRIVE UNIT 26
3-7 FORCE TRANSDUCER 26
3-8 MOTOROLA M681MOIA MICROCOMPUTER MONOBOARD 27ASSEMBLY
3-9 AFCAS RUDDER ACTUATOR/LOOT ASSEMBLY 30
3-10 ORIGINAL AND MODIFIED HYDRAULIC SYSTEMS 31
3-11 SCHEMATIC DIAGRAM OF MODIFIED HYDRAULIC 32SYSTEM
3-12 DIGITAL FLY-BY-LIGHT MICROCOMPUTER PROGRAM 35FLOW CHART
4-1 LINEAR OPTICAL DISPLACEMENT TRANSDUCER 40(LODT)/AFCAS SYSTEM, LABORATORY TEST SET-UP
4-2 LODT/AFCAS SYSTEM LAB TEST SET-UP, 41BLOCK DIAGRAM
4-3 SYSTEM FREQUENCY RESPONSE, DIGITAL FLY-BY- 43LIGHT MODE, LVDT FEEDBACK (REFERENCE 7 DATA)
4-4 SYSTEM FREQUENCY RESPONSE, DIGITAL FLY-BY- 43LIGHT MODE, LOOT FEEDBACK
5

LIST OF FIGURES (Cont'd)
FIGURE NO. TITLE PAGE NO.
4-5 SYSTEM FREQUENCY RESPONSE, ANALOG BACK-UP 44MODE, LVDT FEEDBACK (REFERENCE 7 DATA)
4-6 SYSTEM FREQUENCY RESPONSE, ANALOG BACK-UP 44MODE, LVDT FEEDBACK (LODT PROGRAM DATA)
4-7 STEP RESPONSE, DIGITAL FLY-BY-LIGHT MODE 45
4-8 STEP RESPONSE, ANALOG BACK-UP MODE 45
4-9 CONTROL LOOP LINEARITY, DIGITAL FLY-BY-LIGHT 47MODE WITH LODT FEEDBACK
4-10 CONTROL LOOP LINEARITY, ANALOG BACK-UP MODE 47WITH LVDT FEEDBACK
4-11 DFBL TO ABU AUTOMATIC SWITCHING - SIMULATED 48LOSS OF FIBER OPTIC CABLE p.
4-12 DFBL TO ABU AUTOMATIC SWITCHING - SIMULATED 48LOSS OF POWER TO CIU
5-1 T-2C AIRCRAFT DFBL EQUIPMENT LOCATION 52
5-2 COCKPIT INSTRUMENT PANEL 53
5-3 PHOTO RECORDER PANEL 55
5-4 TELEMETRY AND PROCESSING CENTER 56
5-5A STEADY SIDESLIP, ANALOG BACK-UP MODE - 58FLIGHT #1 INSTRUMENTATION DATA
5-5B STEADY SIDESLIP, DFBL MODE - FLIGHT #1 59INSTRUMENTATION DATA
5-6A RUDDER DOCUBLETS, ANALOG BACK-UP MODE - 60FLIGHT #1 INSTRUMENTATION DATA
5-6B RUDDER DOUBLETS, DFBL MODE - FLIGHT #1 61INSTRUMENTATION DATA
5-7A SIDESLIP-PULSES-DOUBLETS, ANALOG BACK-UP 62MODE - FLIGHT #2 INSTRUMENTATION DATA
5-7B SIDESLIP-PULSES-DOUBLETS, DFBL MODE - 63FLIGHT #2 INSTRUMENTATION DATA
6

Im LIST OF FIGURES (Cont'd)
FIGURE NO. TITLE PAGE NO.
5-8A FULL RUDDER, SIDESLIP & RELEASE, ANALOG 64I BACK-UP MODE - FLIGHT #2 INSTRUMENTATION DATA
5-88 FULL RUDDER, SIDESLIP & RELEASE, DFBL MODE - 65
FLIGHT #2 INSTRUMENTATION DATA
5-9A FULL RUDDER, SIDESLIP & RELEASE, ANALOG BACK-UP 66
MODE - FLIGHT #3 INSTRUMENTATION DATA
I 5-9B FULL RUDDER, SIDESLIP & RELEASE, DFBL MODE - 67FLIGHT #3 INSTRUMENTATION DATA
5-10A SIDESLIPS-PULSES, ANALOG BACK-UP MODE - 68FLIGHT #3 INSTRUMENTATION DATA
5-10B SIDESLIPS-PULSES, DFBL MODE - FLIGHT #3 69INSTRUMENTATION DATA
5-10C RUDDER PULSES & DOUBLETS, DFBL MODE - 70
FLIGHT #3 INSTRUMENTATION DATA
A-1 MOTOROLA MICROCOMPUTER UNIT 78
A-2 MONOBOARD MICROCOMPUTER 79
A-3 ANALOG-TO-DIGITAL CONVERTER - MP7208/7216 82
A-4 DIGITAL-TO-ANALOG CONVERTER - MP7104 82
A-5 GRAY-TO-BINARY CODE CONVERTER, BLOCK DIAGRAM 85
A-6 GRAY-TO-BINARY CODE CONVERTER, INTERCONNECTION 86DIAGRAM
B-i DIGITAL FLY-BY-LIGHT PROM MAP 103
C-i DFBL/ABU FUNCTIONAL BLOCK DIAGRAM 112
IL
1 7
II ll

LIST OF TABLES
TABLE NO. TITLE PAGE NO.
3-1 LIST OF 8000 PSI (55 MPa) COMPONENTS 33
4-1 MOTOR COIL CURRENTS, SYSTEM NULL 49
A-I ACCUMULATOR AND MEMORY INSTRUCTIONS (MC6800) 80
A-II INDEX REGISTER AND STACK MANIPULATION 81INSTRUCTIONS (MC6800)
A-Ill JUMP AND BRANCH INSTRUCTIONS (MC6800) 81
A-IV CONVERTER CHARACTERISTICS ANALOG TO DIGITAL 83
C-I DESIRABLE FLIGHT CONDITIONS 117
8
J - -'

II 1.0 INTRODUCTION
1 1.1 BACKGROUND INFORMATION
The MIL-T-5289 Linear Optical Displacement Transducer (LODT) was
developed by the Hamilton Standard Division of United Technologies undercontract to the Naval Avionics Center (Reference l). The LODT wasdesigned as an electrically passive means of accomplishing linear motionsensing in the rudder control system of a Rockwell International T-2Caircraft fitted with components comprising the Advanced Flight Control
I Actuation System (AFCAS). Rockwell served as developer of the AFCASunder contract to the Naval Air Development Center and provided NAC withrecommendations for configuring the LODT, such as mechanical envelope andoutput code format, which would aid integration of the LODT into theAFCAS.
The LODT represents a unique application of the developing technology ofairborne fiber optics to the field of flight control sensing. In orderto gain confidence in the LODT's ability to function as a reliablecomponent of a flight control system, it must undergo test whilesubjected to conditions of a flight operation which cannot be simulatedin a laboratory environment.
The development of Advanced Flight Control Actuation Systems (AFCAS) fornext generation aircraft has been a joint undertaking by the Navy andRockwell International Corporation since 1972. The AFCAS conceptdeveloped by the Naval Air Development Center (NADC) is a direct drive,lightweight hydraulic, surface actuation system capable of beingcontrolled with a direct digital command (References 2 through 7). Thissystem was successfully flight tested in the T-2C aircraft in 1979 andwas reported on in Reference 7.
The optical command link, developed and laboratory evaluated as part ofthe Navy's HOFCAS (Hydra-Optic Flight Control Actuation System, Reference8) program was successfully flight tested and reported on in Reference 9.
The assets of the programs cited were utilized in the Flight Evaluationof a Linear Optical Displacement Transducer (LODT) program. Necessarymodifications to integrate the LODT as an active sensing unit of theAFCAS installation in the T-2C aircraft, laboratory testing andIsubsequent flight evaluation are described in detail in this report.
II
I9
I

1.2 OBJECTIVE
The objective of this program is to evaluate the operation of theMIL-T-85289 Linear Optical Displacement Transducer as an active sensingunit of the Advanced Flight Control Actuation System in a T-2C aircraft.
1.3 TECHNICAL APPROACH
The technical approach used in the evaluation of Linear OpticalDisplacement Transducer utilized the assets of the AFCAS and HOFCASprograms in conjunction with the LODT equipment, and to demionstratethrough rigorous system laboratory tests the suitability of the LOOTconfigured system for controlling the rudder of the T-2C aircraft.
The Electronic Drive Unit, and the Microcomputer Power Supply were usedwithout change. Modifications to the microcomputer included the additionof a Gray-to-Binary code converter, differential line drivers andreceivers, internal wiring and electrical connector to interface with theLOOT Computer Interface Unit, and program changes to accommodate the LOOTin the control loop and also provide an LODT analog output signal forinstrumentation. Hardware for mounting the LOOT to the actuator body wasadded to the AFCAS actuator. Two cable harnesses were added; one toprovide interconnection between the CIU and the microcomputer, and theother to provide power to the CIU. Aircraft wiring changes consisted ofparalleling the LVDT No. 1 output to both channels of the EDU.
The LOOT evaluation criteria were selected to provide a broad range ofsystem operation while maintaining compatibility with the T-2C dynamicperformance req~uirements. Safety provisions, including failure modeevaluation, were based on T-2C flight safety requirements. Self-monitoring features in the microcomputer program cause the system toautomatically revert to the Analog Back-Up (ABU) mode in the event thatpredetermined tolerances are exceeded in the digital equipment. Thesafety features also include a hydraulic by-pass valve on the directdrive actuator. This device allows the rudder to seek a trail positionif the rudder control system failed. Flight testing on previous programshad established the aircraft can be safely landed with the rudder in thetrail position. This feature establishes a third level of redundancybeyond the DFBL and ABU modes of control.
All major components needed to fly the LOOT in the T-2C were assembled inthe laboratory for system integration testing. System operation wasverified in the laboratory prior to aircraft installation. Frequencyresponse, step response, linearity, hysteresis and failure modesswitching were performed simulating aircraft operation.
10

IThe test system was installed in the T-2C with instrumentation for theLODT and LVDT analog outputs as well as standard parameters such asairspeed, altitude, engine rpm, etc. Flight data were collected by photorecorder and telemetry systems.
Procedures were established for system checkout, ground demonstration,and flight testing. More than fifty (50) hours have been logged on theDigital Fly-By-Light system prior to the LODT test installation. Pilotobservations and instrumentation data were used as a basis for evaluatingthe test LODT installation.
waI
III
III
I
1'11
£

This page intentionally left blank.
12 ,

I 2.0 T-2C AIRPLANE
2.1 GENERAL DESCRIPTION
The T-2C "Buckeye" is built by Rockwell International Corporation, NorthAmerican Aircraft Operations-Columbus. The Buckeye is a two-place,subsonic trainer powered by twin turbojet engines. The aircraft isdesigned for both land and carrier based operations. Distinguishingfeatures include wide-track tricycle landing gear, straight tapered
t wings, and low slung intake ducts, Figure 2-1.
The T-2C is equipped for cross-country flight, night flying and lowaltitude, high speed navigation exercises. Maximum level flight speed ofthe Buckeye is 465 knots (239 m/s) at 15,000 feet (4.6 kin); the serviceceiling is 45,000 feet (13.7 kin). Takeoff and landing speeds are in therange of 95 to 110 knots (49 to 57 m/s). A typical takeoff gross weightis 13,000 pounds (5900 kg).
Dual power sources are provided for the electrical, hydraulic, andIair-conditioning systems. The flight control system includes hydraulicfull-powered ailerons, a boosted elevator, and an electric trim system;
rudder operation is manual. The aileron and elevator actuators are partof mechanical linkage connecting the pilot's stick to the controlsurfaces. Thus, in the event of a hydraulic system malfunction, controlof Vie aircraft can be accomplished manually.
2.2 HYDRAULIC SYSTEM
The T-2C has a 3000 psi (21 MPa), Type 11 (-65 to +2750F) (-54 to+1350C), single hydraulic system. Two pumps, one on each engine,provide power to operate the landing gear, speed brakes, arresting hook,aileron actuator, and elevator boost package. The pumps are constantpressure, variable delivery, axial piston designs. Each pump is capableof delivering 4.9 gpm (18.5 L/M) at 7800 rpm. Hydraulic fluid (MIL-H-5606) is supplied to the pumps by an air/oil type reservoir pressurizedby engine bleed air. Fluid cleanliness is maintained by 5 micronabsolute filters.
One pump can adequately handle all flow demands. However, if supplypressure should drop below 1800 psi (12 MPa), a priority valve is used toensure operation of the aileron and elevator actuators. A cockpitcontrolled shutoff valve is installed in the aileron/elevator subsystemto permit simulating loss of power for training purposes. The landing
j gear and arresting hook can be lowered and locked by gravity, if
I desired. The wheel brakes have an independent hydraulic system.
13

L
At--
144

I2.3 ELECTRICAL SYSTEMElectrical power is supplied by two 28 volt DC, 300 ampere starter-generators, one mounted on each engine. The generators are connected forparallel operation and power the primary bus. Output voltages areregulated for varying loads and engine speeds.
Two nickel-cadmium 24 volt rechargeable batteries are used for enginestarting and emergency DC power. The batteries are normally connected inparallel, but are used in series for engine starting.
A portion of the 28 volt DC power is converted to 115 volt, 400 Hz ACpower by two rotary inverters. Inverter No. 1 produces 500 volt-amperesfor instruments; Inverter No. 2 supplies 1500 volt-amperes for avionicsand serves as a backup source for instrument power.
11

This page intentionally left blank.
16
I

I i
3.0 AFCAS DIRECT DIGITAL DRIVE, LODT FEEDBACK TEST INSTALLATION
3.1 GENERAL DESCRIPTION
The fly-by-wire rudder control system incorporating a digital micro-computer generated PWM valve drive signal was originally installed in theT-2C aircraft during the AFCAS program (References 6 and 7). This systemwas modified under Contract N00163-82-C-0232 to test a Linear OpticalDisplacement Transducer as the feedback element for controlling therudder of the T-2C aircraft while operating in the Digital Fly-By-Light(DFBL) mode. Principal components in the test installation are:
o Linear Optical Displacement Installed and testedTransducer (MIL-T-85289) per LODT program.
o Computer Interface Unito Fiber Optics Cableo Gray-to-Binary Converter
- EDU- Localized Hydraulic Power Unit
(8000 PSI)- Force Transducers Previously installed- LVDT Position Transducer & tested per Phase 5- Microcomputer Assembly &6 of the AFCAS- Microcomputer Power Supply program.
Two modes of system operation are provided, the Digital Fly-By-Light(DFBL) mode and the Analog Back-Up (ABU) mode. In the DFBL mode, themicrocomputer converts the pedal force command into a digital signal,sums it with the digital rudder position feedback signal from the LODTand generates a PWM error command signal. The PWM error signal isconverted to an optical signal which is transmitted to the EDU via twofiber optic cables where it is restored to an electrical PWM signal,amplified and power converted into four separate coil currents within theactuator torque motor. In the ABU mode, the pedal force commands andrudder position feedback (now supplied by an LVDT) bypass the micro-computer and are connected directly to the EDU where they are summed,amplified and power converted into four separate coil currents within theactuator torque motor.
A functional block diagram of the major components is shown in Figure3-1. The shaded areas indicate which components were added or changedfor the Digital Fly-By-Light system incorporating the MIL-T-85289 LinearOptical Displaement Transducer.
17

4- LAi4
s-MEm ).-
(U a
-.
C3 Q - a 41
S-0-)
-U
IJ
I4 r- r
-U- 4JL
j4
18

I3.2 SYSTEM DESCRIPTION
Figure 3-2 contains a functional block diagram that illustrates the DFBLand ABU modes of operation. A functional schematic of the system appearsin Figure 3-3.
The DFBL mode is selected by momentarily holding the cockpit DFBL ENGAGEswitch to ON, energizing the DFBL control relays and resulting in thefollowing:
o The pedal command and LODT feedback signals are connected to themicrocomputer inputs. EDU pedal command and LVDT feedback signalinputs are grounded.
o The microcomputer PWM error command is connected to the EDU via thefiber optic control links.
If the microcomputer senses the system is functioning properly, a powerground is continuously supplied to the DFBL ENGAGE switch holding coil bythe microcomputer and the system remains in the DFBL mode.
The ABU mode may be selected by manually placing the DFBL ENGAGE switchto OFF. The ABU mode is automatically selected when the microcomputersenses abnormal system operation in the DFBL mode.
Switching to the ABU mode results in the following:
o The fiber optic error command link output in the EDU is disabled andthe pedal comuand and LVDT feedback transducer outputs are connecteddirectly to the EDU where they are summed and power amplified todrive the four coils in the torque motor of the actuator direct drivevalve.
The various system components are discussed in the following paragraphs.
3.2.1 Actuator Position Transducers
LODT (MIL-T-85289(AS))
The Linear Optical Displacement Transducer (LODT) provides the rudderactuator feedback signal in the Digital Fly-By-Light (DFBL) mode. TheLODT MIL-T-85289(AS) equipment consists of the Displacement Transducer,Fiber Optic Link and Computer Interface Unit as shown in Figure 3-4. Acut-away view of the transducer is shown in Figure 3-5. Mounting of thetransucer on the rudder actuator is shown in Figure 3-9.
Absolute linear position over the + 1.75 inches (+ 4.45 Cm) of travel isprovided by means of a 12-bit Gray-code using a fTber optic face platemade up of a glass substrate with a chrome encoder mask. The 12-bit dataprovides measurement resolution of approximately 0.0008 inches (0.02mm). A digital-to-analog converted LODT signal is provided, forinstrumentation, in both the DFBL and ABU operational modes.
19i0 ---

(-
200

f I.- sr.-.
ri- I..
P, t so- OMI&
PAS-a-- PA A
mks-., 1

I I T,
2, 0fArP) CO
MRcbPIRAS
A. ADD)'1 Aye4?e
' ADDAO~r1m-
-ma ack"P'.
To& .4 Ctam.C ~i
",db Ft Ass
tie P.aec
Ca~9poLfCRA 14 16014' 12~- -A - -

ELCTD.l- D.-t MT_ _LJ
FIFq ~7al -. RECNE
D LA.-4

Fiur 3-.Dgia
1igh Sytm T-CR
I, Fucioa SD
Li~~~ II7 21 ~ A PIIA
-. 21

LJNLAR O~TICL O. D:&"ENLT
Figure 3-3. Digital Fly-By-041rL Or 5 rr9M, Light System, T-2C Rudde-r~~ Control , Functional Schematic
21

II
LUJ
LLLU
CL
C)
-
a4)
LjL
LLI CC
224

G33
C33
CM~
cl1-ea
ca-
LuL
us CL.
C) U
- L)
CL L322J.
23L

LVDT
A Schaevitz Model 2000 HCD DC Linear Variable Differential Transformer(LVDT) provides the rudder actuator feedback signal in the ABU mode. Inthe DFBL mode, the LVDT is used for monitoring the validity of the LODTfeedback signal.
LVDT excitation is provided by the EDU + 15 VDC power supply. The LVDTscale factor is 5.0 VDC/in (1.97 VDC/CmT. The actuator linear positiontravel, + 1.75 in. (+ 4.45 Cm) max., is converted through a bell crank andpush rod-to an angulir rudder travel of + 120 max. The LVDT is shownmounted on the rudder actuator in Figure-3-9.
3.2.2 LODT Fiber Optic Link
The LODT Fiber Optic Link consists of four bundles of seven fibers, eachpackaged in a single strengthened cable. A 20-pin Hughes type C22 fiberoptic connector is terminated identically on each end. Dust covers aresupplied to maintain cleanliness of the fiber optic pin during storage.The overall cable diameter is 3/8" (9.525 mm) with a 3.7 inch (9.4 Cm)minimum bend radius. The strain relief of the connector and the Kevlarstrength members of the cable provide an overall pull strength in excessof 80 lbs. (356 N).
Two of the seven fiber bundles are used to transmit the light emitted bythe LED's to the transducer. Six fibers in each of the other two bundlesare used to return the encoded signals from the transducer to the CIU.Each of the 28 fibers is a low loss, 100 micron core, 140 micron clad,graded index, communication grade, glass-on-glass fiber with a singlebuffer. The fiber optic link is shown in Figure 3-4 interconnectedbetween the CIU and LODT.
3.2.3 Dual Channel PWM Fiber Optic Links
The dual channel fiber optic links are used to transmit Pulse WidthModulated (PWM) rudder error signals from the microcomputer to theElectronic Drive Unit. The unipolar optical PWM signals are received inthe EDU and restored to bipolar electrical PWM signals to drive theactuator control valve. Commercially available fiber optic componentswere used for both the transmitters and receivers.
3.2.4 Computer Interface Unit (CIU)
The Computer Interface Unit contains the active electro-optic devices, andthe control and signal processing electronics for interfacing with theFlight Control Computer. The CIU interrogates the transducer upon receiptof a read command from the Flight Control Computer. Two Light EmittingDiodes (LED's) are pulsed upon receipt of the read command. The trans-ducer is interrogated and the encoded signal is received via twelve photo-diodes. The diodes and a transimpedance amplifier are packaged in acustom hybrid that provides less susceptibility to EMI and provides a lownoise level output. The data is received in parallel by the twelve photo-diodes. The CIU and its aircraft mounting plate are shown in Figure 3-4.
24

I3.2.5 Electronic Drive Unit
The EDU in Figure 3-6 contains the electronics for sensor signal condi-tioning, signal summation, and power amplification to current drive thetorque motor. The EDU was designed and fabricated by North AmericanAircraft Operations. It consists of two independent channels, each sub-divided into dual valve driver circuits. A functional schematic of theEDU electronics is included in Figure 3-3. Each of the four poweramplifiers employs current feedback with a highly reliable "Darlington"power transistor configuration, utilizing redundant power supplies. Thecircuitry is designed so that in the event an output stage fails "hard-over", the voltage applied to a motor coil will not exceed its ratedvalue. This limiting feature permits a sub-unit failure to be compensatedor nullified by another sub-unit. Closed loop tests showed that operationof the redundant sub-units provided a high immunity to component failuresas reported in Reference 4, NR75H-l, Control by Wire Modular ActuatorTests (AFCAS).
3.2.6 Pedal Force Transducers
Two force transducers, Schaevitz Model FTD-IT-500 (Figure 3-7), are usedto convert pedal forces into DC signals. Excitation is provided by theEDU + 15 VDC power supplies. The force transducers are connected to thepedaTs through a cable/sector assembly having a mechanical advantage of2.28 (pedal force x 2.28 = transducer force). The transducers have amaximum capacity of 500 lbs. (2.2 kN), a spring rate of approximately 8000lb/in (1.4 MN/m), and a design scale factor of 0.01 v/lb (.002 v/N).
3.2.7 Microcomputer Assembly
The microcomputer assembly is housed in an enclosed unit, and consists ofthe following subassemblies:
Part No. Nomenclature
M68MMOA Motorola Mono-Board Microcomputer ModuleM68MMO5A Analog-To-Digital (A/D) Converter ModuleM68MMO5C Digital-To-Analog (D/A) Converter ModuleM68MMCC05 Card Cage & Mother Board AssemblyEQ H383246-11 Signal Conditioning BoardED H384415 Gray Code Converter
The mono-board microcomputer module is shown in Figure 3-8, and is acomplete computer-on-a-board having all the processing and controlrequired for a microcomputer-based system. It incorporates the MC 6800MPU, I K of Random Access Memory (RAM), provisions for 4 K of ProgrammableRead Only Memory (PROM), timing and control, buffers, an AsychronousInterface Adapter (ACIA) and two Peripheral Interface Adapters (PIA).
25
I.- ,

Figure 3-6. Electronic Drive Unit
Figure 3-7. Force Transducer
26

I L
0
.
270

The A/D converter module consists of eight channels of A/D conversion ofwhich four are utilized. The D/A converter module consists of fourchannels of D/A conversion.
The signal conditioning board contains four channels of sensor signalconditioning and a relay driver that interfaces the microcomputer monitoroutput with the system control logic.
Additional information on the microcomputer assembly is contained inAppendix A.
The Gray Code Converter board enables the computer to interface with theoptical transducer's Computer Interface Unit (CIU). The Gray CodeConverter's buffers change the CIU differential signals to standard TTLlevel signals. The serial Gray code data from the CIU is then convertedto straight binary by the use of an exclusive OR and shift registers. Theshift registers in the Gray Code Converter have two functions. The firstfunction is to enable exclusive OR-ing of the previous bit with thepresent bit to generate the straight binary. The second function isserial to parallel conversion with temporary storage. The data to beloaded into the computer is stored in the shift registers until thecomputer is ready to read the data. When the data has been shifted intothe registers, a flag in the PIA is set which informs the computer thatdata is ready for loading. After loading the data, the computer resetsthe shift registers so that another conversion can be started. Allconversions start after the computer sends the CIU a read pulse.
3.2.8 Microcomputer Power Supply
A separate power supply, Motorola P/N M68MMPS1, converts single-phase, 115VAC, 400 Hz to + 5 VDC, and + 12 VDC to power the microcomputer assembly.
3.2.9 AFCAS Actuator
The fly-by-wire AFCAS rudder actuator, P/N 8691-524001-101, is directlydriven by a permanent magnet force motor having four independent coils forredundancy. The force motor armature is mechanically coupled to a spool/sleeve flow control valve which commands actuator piston rate. Pistonfeedback is provided by a DC LVDT and LODT mounted externally on oppositesides of the actuator housing. A hydraulic bypass valve was added toautomatically interconnect the two cylinder chambers in the eventhydraulic power were lost. The T-2C rudder has a travel of + 250. Forsafety reasons, rudder travel was reduced to + 120 in the tixt installa-tion by limiting actuator stroke. This permits the pilot to land safelywith a "hard-over" rudder, opposite engine out, and three knot cross-wind.
28
.1 -

I
Actuator constants are listea below:
Operating Pressure 8000 psi (55 MPa)Piston Stroke (Total) 3.5 In. (8.9 cm)Cylinder Bore 0.926 In. (2.3 cm)Rod Diameter 0.748 In. (1.9 cm)Piston Effective Area 0.234 In.2 (.5 cm2)Force Output (Max.) 1870 Lb. (8.3 kN)Piston Velocity (Rated) 5.5 In/Sec. (14 cm/s)Actuator Length (Extended) 18.375 In. (46.7 cm)
The actuator assembly is shown mounted on a laboratory test fixture inFigure 3-9.
3.2.10 Hydraulic System
The hydraulic system remained unchanged from Phase V of the AFCAS testprogram, described in Reference 6. Changes incorporated in the basic T-2Chydraulic system for the Phase V test program were:
o Addition of an electric motor driven 8000 psi (55 MPa)variable delivery pump.
o Addition of an 8000 psi (55 MPa) control-by-wire rudderactuator and bypass valve.
o Addition of a suction line from the reservoir to the 8000psi (55 MPa) pump, pressure line from the pump to the rudderactuator, and actuator return line.
o Addition of pump case drain return and shaft seal overboardline.
o Relief valve installed in the 8000 psi (55 1MPa) system.
o Heat exchanger installed in the 8000 psi (55 MPa) pump casedrain line.
The original and modified hydraulic systems are compared schematically inFigure 3-10.
The modified system is shown schematically in Figure 3-11; 8000 psi (55MPa) components are listed in Table 3-1. The 3000 psi (21 MPa) and 8000psi (55 IlPa) systems shared a common reservoir and common return lines.All major components, except for the rudder actuator, were located in thefuselage compartment above the engines.
29

300

IRESERVOIR
ODIFIHYDRAULIC POWERI SHUT-OFF VALVE i
\ LATERAL iI I (NGINE 3000 \ l CONT . S YS ".iF_, HORIZONTAL300uSI (EGIE 00 PS l CONT. YS.;
PUMP DRIVEN I
I I GEAR SYS. r
I iARRESING ][
ORIGINAL 3000 PSI SYSTEM Sytm
31!
VHYDRAULIC POWER
SHUT-OFF VALVE
LATERALI CONT. SYS.
HORIZONTAL18000 PSlI 3000OPSIPU P UM 3000 PSI CONT. SYS.
(ELECTRIC MOTOR' LANDING
DRIVEN PUMP) GEAR SYS._] SPEED
i GEAR
_IDIRECTIONAL] !__ICONT. SYS.
MODIFIED HYDRAULIC SYSTEM
Figure 3-10. Original and Modified Hydraulic Systems
i 31
J16v 1 o=

AUXILIARYAIR C- PRESS
E REGULATORE NGINj --- _ -_ -_
4+ AIR/OILDUMP RESERVOIR
VALV~rv FILTER
r--DIRECTIONAL AXIS\TEST INSTALLATION
--. THERMAL SWITCH
ELEC (
MOTOR T o
R.H. S 5 L.H. SPPUMP .PUMP FILTER T3000 3000PSI PSI r 1 p' CD
I I 8000 Psi
EXT. PRESS VALVE _ PUMPDISCONNECT HEAT
EXCHANGER L
SNUBBER T
PRESS.
S C RELIEF VALVEFILTER TO P
I COCKPIT D-GAGE
_ ELEVATOR AND
AILERON ACTUATOR -4SHUT-OFF VALVE TRUDDER
RELIEF VALVE ACTUATORVALVE l [Z-
UTILITY SYSTEM - I CCNTROLSPEED BRAKES -D RELAYLANDING GEAR &ARRESTING GEAR
CODE: MICRO-COMPUTER
Pressure Line
Return Line. -- -Supply Line
~dW~-Wiring TORUDDER IPEDALS FORCE
I ... TRANSDUCER
Figure 3-11. Schematic Diagram of Modified Hydraulic System
32
.' -,.1

ITABLE 3-1
LIST OF 8000 PSI (55 MPa) COMPONENTS
PART NO. DESCRIPTION MANUFACTURER
66059 Motor/Pump Unit Aerospace Division of AbexCorporation
Aerospace Electrical Divisionof Westinghouse ElectricCorporation
8691-524001-101 Rudder Actuator North Aerican AircraftAssembly Operations, Columbus Plant,
Rockwell InternationalCorporation
8691-524001-051 Bypass Valve North American Ai rcra ftOperations, Columbus Plant,
Rockwell InternationalCorporation
1180A Hydraulic Relief PneuDraulics, Inc.
Valve
R44598-6-0310 Hose Resistoflex Corporati on
21-6-9 Tubing Trent Tube Division of ColtIndustries
Dynatubeka/Seri es Fittings Resi stofl ex Corporati on
MIL-H-83282 Fluid Royal Lubricants Co.
G Dynatube, a Resistoflex development, is patentedin the United States and foreign countries.
33
! .- 'T . .. .. .. .. . .... -T - - ° "-. .. ,Ao . .

3.3 SOFTWARE DESCRIPTION
3.3.1 Function
Software was developed to enable the microcomputer to perform three basicfunctions; a command/feedback control function, a control monitorfunction, and a digital-to-analog conversion of the LOOT feedback signalfor instrumentation recording.
The command/feedback control function sums the pilot command and rudderposition signals to produce an output signal proportional to thedifference to drive the actuator.
The control monitor function measures the level of error between the pedalcommand and the rudder actuator position feedback, and if a preset levelis exceeded for a given period of time, the engage command will beremoved. Actuator control will then revert to the ABU mode. A continuouscheck is also made on the LODT and LVDT transducer input A/D conversionhardware by comparing the two digital feedback signals with each other andin a similar manner comparing the digital pedal signals. Any differencesexceeding preset levels for a given period of time will result inautomatic switching of system control to the ABU mode.
3.3.2 Program Modules
The DFBL Microcomputer Program Flow Chart, Figure 3-12, illustrates themodular nature of the software and the sequence in which the modulesfunction. The program modules were designed, coded, and initially checkedas individual entities prior to being integrated.
Following is a brief description of the program modules:
Initialize - The Initialize module sets the D/A Converter (DAC) channel 4to provide + 5 VDC to hold in relay Kl (ref. Figure 3-3). The Kl relay,in turn, holds the DFBL Engage switch in the engage position. TheInitialize module also clears the Gray to Binary Converter and programsthe PIA for the necessary I/O. All timing counters are also set to ensurethat the Monitor function does not immediately turn off the DFBL Engageswitch.
Input 1 - The Input 1 module, as the first in the repetitive loop, is usedto start the PWM output signals. This is done by setting both DAC-l andDAC-2 at + 10 VDC. It then reads the command or LODT depending on thestatus of a memory location. If the memory location is set, the modulereads the LODT, otherwise it reads the command. The program operates at500 Hz, which corresponds to reading the command or feedback at 250 Hz.A/D conversion of the command is controlled by this module and so is thestart of a read pulse to signal the CIU for data. Data which is to beoutputted to instrumentation is also done during execution of this module.
34
. .... . . . ia

LuJI- LLI
LuL
LAu
LLLu
U) Lu 1.cc CDc 0tC c
- c : L.) LuJ V) LL01- CD 0 0 Q
>- EuiLC-~ :x 0m 0
r- f1 Z cA =D 0) 0 0M )CD C.J -J 00 .J I-
0D- C)D~ C -j F -
V) C:) C:)
0 - 0 0 Lu0 0 0 7-1J
- - -~ J ~ A 0 C. -
-S
'3
C"J
U~C.
0J J. CLo V!=--s
u
35

Command 1 Limit - Inputs are scaled so that full scale, + 120 of rudderis + 5 VDC, which is one-half of full range for the A/D hannels. Sincetheforce transducer that provides CMD1 is not mechanically orelectrically limited to + 5 VDC, a software limit is provided to set CMDIat either + 5 VDC, as appropriate, when that value is exceeded. Output ofthe A/D co-nverter is a 12-bit word, proportional to the voltage.
Error - The Error module performs a double precision subtract of CMD1 froml ' and sets computer gain through a series of shifts. It thendetermines polarity of the error and transfers to the appropriate outputmodule.
Output - The Output module sets countdown timers that establish theu ion of the plus and minus portions of the PWM output signal. Itswitches DAC-l and DAC-2 to -10 VDC when the "positive" counters havetimed-out. When the "minus" counters time-out, it transfers control tothe Input 2 module.
Input 2 - The Input 2 module controls the conversion of CMD2 and POS2 andprovides limits on CMD2 in the same manner as Input 1. CMD2 and POS2 arefor use in the Monitor functions.
Monitor - The Monitor module compares the redundant pilot command andrudder position input signals. If a difference in either of 1.50 isdetected for a period of 0.128 seconds, the program is set to deenergizethe DFBL holding relay (Kl in Figure 3-3) and reverts control of thesystem into the ABU mode. The monitor also checks the magnitude of theerror signal. If it exceeds 1.50 for 2 seconds, the DFBL holding relayis deenergized, and control of the system again reverts to the ABU mode.As long as the monitor does not detect an error, it transfers control backto the Input 1 module. The LODT read pulse which was started in the Input1 module is also reset at the start of this module.
3.3.3 Flight Test Program Software
Support software, trade name "Microbug ROI" was purchased with themicrocomputer equipment and enabled communications with the microcomputervia a Teletype Corp. Model 33TU teletype keyboard/printer reader/punchunit. An RS-232-TO-TTY adapter unit provided the interface through theACIA, between the microcomputer and the teletype.
The communication consisted of entering both program, monitoringmicrocomputer operation, and dumping of programs onto paper tape forstorage.
After the software modules were operating satisfactorily they were thenmerged to become an operational program. After checking the operationalprogram with the microcomputer integrated into the rudder system (in thelaboratory), the program was then loaded into a PROM. The PROM wasinstalled in the microcomputer and the operational program verified. Allsubsequent final system response testing and calibration for the flightconfiguration was performed with this PROM installed in the microcomputer.
36
•- . _

IA listing of the flight program software is contained in Appendix B. Theprogram was designed to function at a rate of 500 Hz, and occupies 610bytes of the available 4096 bytes of PROM and 19 bytes of the 1024 bytesof "scratch pad" RAM. The PROM map is also contained in Appendix B.
( i
37
ii

This page intentionaTly left blank.
38
..........

4.0 LABORATORY TESTS
4.1 TEST OBJECTIVES
Laboratory tests were conducted on the integrated Linear OpticalDisplacement Transducer (LODT)/AFCAS system. The objective of the testswas to verify the performance of the Digital Fly-By-Light rudder controlsystem with LODT feedback by comparing system performance data with thatobtained using conventional LVDT feedback. Testing included failure modesas well as operational modes and monitoring of instrumentation parametersto ensure a high level of confidence in system compatibility prior toaircraft installation.
4.2 TECHNICAL APPROACH
The actual aircraft hardware was used whenever possible in the lab testset-up to permit testing and evaluation of the flight hardware and toeliminate potential problems during subsequent installation and operationin the aircraft.
Included in the lab test set-up were the rudder LVDT and LODT feedbacktransducers, rudder actuator, EDU, microcomputer and associated powersupply, Computer Interface Unit (CIU), digital display unit, fiber opticcable, and the control panel switches and control relay used in theaircraft. A laboratory hydraulic pump was utilized for all testsrequiring hydraulic flow.
4.3 INTEGRATION TESTS AND RESULTS
4.3.1 Lab Set-Up
A lab wire harness, configured to simulate the aircraft wiring, was used.A terminal strip/interconnection board provided control, test points, andthe interface between the wire harness, system components, and lab testequipment. A pictorial of the lab set-up is shown in Figure 4-1, and theassociated block diagram is depicted in Figure 4-2.
The hydraulic supply used for the laboratory testing utilized a variabledisplacement, axial piston, 4000 psi (27.5 MPa) pump. An accumulator ofapproximately 50 in3 (820 cm3 ) was used in the supply line to minimizesupply pressure transients.
4.3.2 LODT, CIU and Fiber Optic Cable Bench Tests
The LODT was mounted on a laboratory test fixture with the rod endattached to a precision positioning device. Appropriate electrical andfiber optic cable interconnections were made between the units undertest. The availability of a Digital Display Unit (DDU) provided aconvenient method of performing end-to-end operational checks on the LODT,CIU and Fiber Optic Cable. The DDU provided readouts of LODT displacement
39

S
a
LJ~~Cu
C
Cr
Cr
Cu
tfl
C
C
I-
rillCCrL
F-
4-iC
3,
Cr
Uflt ~4' U,C
U
S..
C)C
~2
C)
40

WIF-F
LA-J
,E-
-x tCl. F- Ca- V C-)I;
Cl. LL0
LLLL
M 000 a-0
LLs'
'-
LLI -, (ACDJ W ) = ) D
F- .L

in inches with corresponding Gray code and binary LED readouts. Requiredoutputs from the equipment were verified prior to interfacing with theAFCAS components.
4.3.3 Digital Program and System Operation
The digital program used in Phase VI of the AFCAS program (Reference 7)was modified to accommodate the digital feedback signals from the LODT andits associated CIU. During this development stage, the modified digitalprogram was loaded into the AFCAS microcomputer random access memory (RAM)via the teletype and punched paper tape. This provided the capability tomake program changes, as necessary, to obtain proper system operation anddesired LOOT instrumentation output. Failure mode sensing and signalamplitude features of the software program were also monitored. Afterverification, the software program was stored in a PROM and installed inthe microcomputer for system laboratory testing, and subsequentinstallation in the T-2C aircraft.
4.3.4 System Response Tests
System response tests were performed in both the Digital Fly-By-Light(DFBL) and Analog Back-Up (ABU) operational modes. Drive signals wereinjected into the pedal command input at an amplitude representingapproximately + 0.2 inches (5.1 mm) of actuator travel. The drive signaland either the-LODT or LVDT feedback signal, as required, were recorded ona strip chart recorder to provide frequency, gain and phase shift data.System performance comparisons are presented showing the DFBL mode systemresponse with LODT feedback and previous DFBW data with LVDT feedbacktaken from the Reference 8 report.
4.3.4.1 DFBL Frequency Response - Figure 4-3 shows the DigitalFly-By-Wire mode frequency response with LVDT feedback reported inReference 8. System bandpass is 3.5 Hz (3 db point) with a gain margin of12 db and phase margin of 55 degrees. Figure 4-4 shows the DigitalFly-By-Light mode frequency response with LODT feedback. Essentiallyidentical results were obtained, verifying that system frequency responseis unaltered when the LODT is used as the feedback element.
4.3.4.2 ABU Frequency Response - The Analog Back-Up mode frequencyresponse from Reference 8 data is shown in Figure 4-5. System bandpass is0.7 Hz with a gain margin of 27 db and a phase margin of 110 degrees.Since the LODT is not used to close the loop in the ABU mode, this datawas rerun only to verify that using one LVDT for both EDU channels hadlittle or no effect on system response or scale factor. Figure 4-6 ABUmode frequency response shows a bandpass of 1.0 Hz with a gain margin of32 db and a phase margin of 100 degrees which compares very closely toReference 8 data.
4.3.4.3 DFBL and ABU Mode Step Responses - The DFBL mode step responseis shown in Figure 4-7. Both the LODf digltal-to-analog converted signaland the LVDT signal were recorded for comparison purposes. It is seenthat LODT output is identical to the LVDT output and therefore should not
42

K-2~ ~~*
GAI ri: r
H+['
313 01 I
LVT Feebac (Reference47 Data
It GoN~ fl
-20 -5
-3 I IT
01 10POCQUENCY (N4*)
Figure 4-3. System Frequency Response, Digital Fly-By-Light Mode,LOOT Feedback (eeec aa
I* 43 .r r .rr r

WEI
-ISO.
t .: GAIN j T2 p
I Ir
441
40 1 '

- - - - - - - -
- - - - -- - - - - - - - - - . . .
-~~ ~~ -' -

degrade system operation. The maximum slewing rate calculated from Figure4-7 DFBL mode data is 400/sec and exhibits stable control loop operationwith very little overshoot and satisfactory damping. The ABU mode stepresponse shown in Figure 4-8 exhibits a maximum slew rate of 520/sec anda damping of at least 0.7 with no overshoot. The 400/sec DFBL slew rateis more than adequate, but is slower than the ABU slew rate. The reasonis that the Pulse Width Modulation in the DFBL mode is intentionallylimited to 88% to maintain capacitive coupling of the error command signal.
4.3.4.4 Linearity - A low frequency triangular wave (0.2 Hz) was usedto check system linearity in both the DFBL mode with LODT feedback and theABU mode with LVDT feedback. Measured system linearity in the DFBL modewas 0.2% of full scale taken from strip chart recording shown in Figure4-9. Measured system linearity in the ABU mode was 1.25% of full scaletaken from strip chart recording shown in Figure 4-10.
4.3.4.5 Failure Mode Tests - Simulated failures were induced while thesystem was fully operational in the DFBL mode with LODT feedback todemonstrate the ability of the system to sense the failure and revert tonormal operation in the Analog Back-Up mode with LVDT feedback.
Simulated loss of LODT fiber optic cable - Figure 4-11 showsthe LODT output in the upper channel and the LVDT output in the lowerchannel with the system operating in the DFBL mode at the outset of thetest. The procedure consisted of inserting a steady state rudder pedalcommand and with the strip chart recorder running at 50 mm/sec, removingthe fiber optic cable connector from the CIU, and recording the sequenceof switching from the DFBL mode to the Analog Back Up (ABU) mode. At theinstant the connector is removed, the LODT output goes to -10 VDC (theanalog equivalent of all digital O's coming from the LODT), while the LVDToutput continues to monitor true rudder position. In approximately 0.1second the ABU mode is automatically switched in and the rudder returns toits original position. The time from the initial failure to the return ofthe rudder to its original position in the ABU mode occurred in 0.62seconds. The transient would be noticeable, but insignificant to thepilot.
Simulated loss of CIU power - Figure 4-12 shows the continuoustime history of automatic switching from the DFBL mode to the ABU modeduring an induced loss of power to the Computer Interface Unit (CIU). Aswould be expected, loss of power to the CIU produces results very similarto the failure mode described in paragraph 4.3.4.5.1. The failure issensed and automatically switched from the DFBL mode to the ABU Mode inapproximately 0.1 seconds. Complete recovery and control of the rudder toits commanded position occurs in approximately 0.65 seconds. The effectin-flight would be a slight transient and virtually no loss in controlcontinuity.
4.3.4.6 Null Currents - Coil (4 ea) currents in the torque motor weremeasured with the ruder pedal cr.,,mand and the rudder position inputsgrounded. The measured values for the DFBL and ABU modes of operation areshown in Table 4-1.
46
~, .. I

)V
- oa)r pofx) =
-_ T A/Iu
Figure 4-9. Control Loop Linearity, Digital Fly-By-LightMode With LOOT Feedback
AAA& OAC 1- U
,,,,64A (A/.o op
Figure 4-10. Control Loop Linearity, Analog Back-Up ModeWith LVDT Feedback
-47
.. . .. . . . •. ... .. . . ... . -- :.. -. . .. . . s Jl

.~ ~~~~ .. . . .. . ...... . . . . .Figure~~~~ .-1 DF. To .B .uoai .witching-
LOOTo .E . . ..,r .s~e .. . . . . .
. . .. ~ . . . . . - . . . .. ~ ~ ~ ~ ~ ~ Nx, .......... . Z . , .
. . .. . . . . . . . . ."
. . . . .. .. . .
Figure.. -2. DB oAUAtmai wthn..... te Los.f..wr.o I
48 =L

TABLE 4-1Motor Coil Currents, System Null
COIL DFBL MODE ABU MODE
#1 6 ma. 14 ma.#2 5 ma. 15 ma.#3 6 ma. 7.5 ma.#4 9.5 ma. .3 ma.
49h

This page intentionally left blank.
50

5.0 FLIGHT TEST PROGRAM
5.1 AIRCRAFT INSTALLATION
The aircraft rudder actuation equipment locations are shown in Figure 5-1and the pilot's cockpit instrument panel showing the controls andindicators used in the Digital Fly-By-Light system are shown in Figure5-2. Additions and modifications to the microcomputer, necessary toaccommodate the LODT are included in Appendix A.
5.1.1 Continuity and Power Checks
Aircraft wiring changes peculiar to the LOOT and LODT Computer InterfaceUnit installation were checked for continuity, proper grounds and thepresence of electrical power on the appropriate connector pins.
5.1.2 Hydraulic Checks
Procedure details are given in Appendix C. The first task involvedfilling and bleeding the 8000 psi (55 MPa) system. A bleed valve wasinstalled in the return line in the RH speed brake well. A ground cartwas connected to the aircraft and the system was filled with MIL-H-83282fluid. With 25 psig (.2 MPa) applied to the T-2C reservoir, air was bledfrom a port on the heat exchanger and from the bleed valve in the returnline.
A leak check was made on the 8000 psi (55 MPa) portion of the system.Pressures up to 8000 psi (55 MPa) were applied; no external leakageoccurred. Pressure was increased sufficiently to operate the test systemrelief valve (9000 psi/62 MPa). No leakage or malfunctions were observed.
5.1.3 System Checkout
Procedure details are given in Appendix C. A pressure of 25 psig wasapplied to the T-2C reservoir. With electrical power on the aircraft, themotor/pump unit was energized. The cockpit gage was observed to read 8000psig (55 MPa). Operation of the 8000 psi (55 MPa) hydraulic system wassatisfactory; no malfunctions or leaks occurred.
Force was alternately applied to the rudder pedals in both the DFBW andABU modes. The proper rudder deflections were visually monitored and thecorresponding voltages and Light Emitter Diode (LED) indications verifiedon the AFCAS test box.
Rudder control was smooth and positive. A small amount of hysteresis wasnoted due to normal friction in the cables, pulleys, and bellcranks usedin the T-2C directional system as follows:
Dead band at 00 ruddero With cable/pulley friction
(no pedal corrections) lOo With cable/pulley friction minimized
(pedals alternately tapped lightly) 1/40
51

iii
0
4 .4-,
0)C E
C II .5-
5-
A -n T4 0~
i LL
K L.
~t t U - C-)L.
L)Fl C\JI~Th I-
- 'I I
i~U ~ ~Ir~i~I I
-J
A
I
A-.
52

-- j-U-U
LLU-
53o

No problems were encountered with the foregoing steps, and all of the datawere satisfactory.
5.2 INSTRUMENTATION
5.2.1 Description
The T-2C was equipped with several flight data acquisition systems. Twowere used in the digital AFCAS program: (1) an 18 channel telemetrysystem, and (2) a 21 hole photo recorder system. The telemetry oscillatorpackage was located in the aft cockpit seat and the photo recorder panel,Figure 5-3, was installed in the nose.
Telemetry data were recorded at the NAAO-C Telemetry and Data ProcessingCenter, Figure 5-4, where a UHF receiving/tracking system provided real-time data acquisition and direct read-out on strip charts. Audiocommunication with the pilot was available for convenience and safetymonitoring.
Pilot instrumentation controls were located above the cockpit instrumentpanel, Figure 5-2, and on the control stick. Data in the two recordingsystems were related by means of correlator numbers printed on the photorecorder film, and correlator blips on the telemetry (TM) strip chart. Acorrelator counter could be read by the pilot for reference purposes.
Flight data parameters instrumented in the T-2C for the digital AFCASprogram are listed in Appendix C. Operating range, accuracies, andresponse capabilities are also given.
5.2.2 Instrumentation Ground Checkout
Instrumentation operation and parameter calibrations were verified in thehangar and also during a 30-minute ground run in the DFBL mode with theaircraft engines operating. System operation was normal and all readingswere within prescribed limits.
5.3 FLIGHT PLAN
The primary objective of the Flight Test Program was to evaluate the oper-ation of the MIL-T-85289 Linear Optical Displacement Transducer (LODT) asan active sensing unit of the Advanced Flight Control Actuation System ina T-2C aircraft. Approximately three flight hours were deemed sufficientto evaluate the LODT performance in an aircraft flight environment, con-firm prior analyses and laboratory tests, and establish a measure of con-fidence in system reliability. The flight plan was designed to exercisethe aircraft's rudder control, and therefore the LODT, over a broad rangeof speed and altitude within the flight envelope of the T-2C. Performancecomparisons would be made at each predetermined flight condition, byperforming the same maneuvers in both the Digital Fly-By-Light (DFBL) andthe Analog Back-Up (ABU) rudder control modes. Details of the flight planare included in reference C.
54

;a. AJ
-4-
55n

5-w
wC-.)
I
5-4-,
U.)5-
I-'-
56

5.4 FLIGHT TEST RESULTS
Three flights were flown for a total of 3.6 hours. The pilot noted notransients or differences in aircraft control when switching between theDFBL and ABU control modes. All planned flight conditions, maneuvers, anddata acquisitions were executed and no malfunctions occurred.
5.4.1 Flight Program Summary
DATE FLIGHT DURATION ALTITUDE SPEED Nz (MAX)
2-22-83 1 1.5 hrs. 10,000 ft 150 KOAS 3.0 g15,000 ft 150 KOAS15,000 ft 200 KOAS20,000 ft 200 KOAS 3.0 g
2-22-83 2 0.9 hrs. 10,000 ft 200 KOAS 3.0 g10,000 ft 250 KOAS15,000 ft 250 KOAS20,000 ft 150 KOAS20,000 ft 250 KOAS 3.0 g
2-22-83 3 1.2 hrs. 15,000 ft 300 KOAS 3.0 g15,000 ft 340 KOAS20,000 ft 300 KOAS20,000 ft 325 KOAS30,000 ft 150 KOAS30,000 ft 200 KOAS30,000 ft 250 KOAS 3.0 g
The following maneuvers were executed in the DFBL and ABU control modes ateach of the altitudes and airspeeds listed above:
o Slow Steady Sideslips (Left and Right)o Small pulses (Left and Right)o Small Doublets (Left and Right)o Full Rudder Si desli ps & Releases (Left and Right)o Full Pulses (Left and Rigt)o Large Doublets (Left and Right)
5.4.2 Telemetry Instrumentation Data
Telemetered data was received on all three flights and appears in Figures5-5A thru 5-10C. The test runs consisted of first executing yaw maneuversin the Analog Back-Up (ABU) control mode and then repeating the maneuversin the Digital Fly-By-Light control mode under the same flight condi-tions. The outputs of both rudder feedback transducers were available atall times, however, the LODT was the active feedback transducer in theDFBL control mode and the LVDT was the active feedback transducer in theABU control mode. To permit direct comparison of the two transducers, thedigital output of the LODT was converted in the microcomputer to an equiv-alent analog signal.
57I ,

-4ro Cal AAL AN
4UT.,dg A.D..$i.
fa -- ~
A.1 A dL"f ..-- -
t - - - - - .- - i - - - + - - - - - - - - " . - - - .
.5*0 .-- Po..~~~~~'0.,0 sacrf. ~ -.-.-.. t .7w- - .
- . - - - - - -. - - . - - - . - - -- - - - -. . . . . - . .
- jns A &_ _ __-m_ _ _ _ _ _ _ _
ftj."v__,_*SX
- F.
Figure 5-5A. Steady SideslipS AnalgBc-pMd lgt 1IsrmnainDt
58

ts-iF"ht41 A-g!A-&. m.or ei 11 A-p~sAmk. /AOOV .o Ow M .. AP&
________________________ 904
-71
..........-- V-
Iv ~ -Pest4dio-
7- -- 7-. . .
01
Figure 5-5B.- Steady Sideslip, DFBL Mode -Flight #1 Instrumentation Data
- 59

.I.poj M r C ,4,A0e,.4.S AM'O
-r . .. ....
T- -I - - . .
p 7
i 4 L-------- ------- - -- ,.------1------------------
'06~ ES .I.- 4 L.r. , - 44. .4.... -
* ~~~~~ ~ ~ . ..f& :I&l ....h.Lkij ...T
1 - 1 . .
- -1OA*,.j Pa~~d'~ffAC .SS I.
ig........... 56 . Rudr......... o ac-p oe lgh 1 ntrmntto.Dt
* .60

A~dde'jeeai Coo 01.AOSA
*#jr-d IS ACA,
I7 MooC-
-.- vv - 71F~
Motor .p ,
LOrAlii~o 4 ih e.Wo, ___ ___
25~~~~~" -- - -.- - -__ _*
f -~~i71~k
As- I.. -T.0Tpe'. M ~. . ,A ed.eubt .L-. . . . .
'awl-av.S~--I
00 t
.~~~~~ . .. .- . I .. . . ..
Figure 5-6B.. Rudder Doublets, DFBL Mode -Flight #1 Instrumentation Data
61

* Ili:... . .... ... .... ... .... .......
* Mainmda,,A'Z AwZa&
/000 *jAfL.i M-r-------------2PA~
dO-. Oq A -s
DT- 7---
- \. Avtsas, Lepr/4'P7.. -
00nT~ t"wi.,pSX
I ~ ~~~ -,
/d -.... . . .
Fi gure 5-7A. Sideslip-Pulses-Doublets, Analog Back-Up Mode -Flight #2 Instrumentation Data
62

A~,d~' n~marm4 Coil DFO A*"-~ r qrforpr -0 oAS
o --- --- ------
-- c --osirt.w f- rq o
-w' ------ ~i
-~~~~ .--------------------------.. A.............
Fiur 5-7B. Sielp-ussDob s D LMd lgt#-IsrmnainDt-~ - - - -.63

- - JtD H T G Wd I- _
MorakC& A,,jO's
Ai"Peco- 250 /4*
-5-* -~.OCA p . .. . ..
tS- - - ------ -
.50 - ~ P--n-- ---'---t'------ .. I___
* ~ ~ ~ ~ . .-. .... E ~ . -_ _ _
-7 4 -.---.- .-- .. -. . . . . . . . . . . .
A M. . . . .,y oA- - v 4 o ~ d
Fiue58A Ful Rudder Sidesi Reflease AnhogBak-pod
Flgh #2 InstrumentationDat
-- - - -- qvac~v~jeA,., - - ----64-

I -A L I/wJ d /4 0 0 o A o - .F B L rMoO Dl
P . .. . . .Ai vwrag Co tz ", q-t-
- oroo Coi.L 4, dMps
.. .. ... ... ... .. .. . .
P s - . .. . . . . . .. .r o . .. . . . . .. . . .
o -. - q L .-- - - . . . . . . ..+ 2* _ _-.. ...
:.1i zi: 7D'I. -. .. ..... j. . . . .
.................
......1 _,_ _ _ _ _ _ __,___r~,, .
I :
-0 .. . . . I ... . . . . . . . . . ..
70 .-- pT- .-
. .. 0 i ...- -- -.. -- . .- -- .. -.. -- -, , ,-
Fiqure 5-8B. Full Rudder, Sideslip & Release, DFBL Mode -Flioht #2 Instrumentation Data
65
.as1
o- ' ... . ._ .. ... . . . . . . ... ..... -, + . . . . ...~~# v O . . lv , Y l +l '+,t c A ' " " -- i "3 ' } m - + .rt ¢ - ,, 3 . . . L -e, " - - . .s' 1 l l . +'

Afaro$A CoiLd It , .
A1 .1 CILd' 09
PVOP A-dS4fDZSO*AS
J. vo .. I
--f~ .7 -7-. - 1 -7
-cat t. 1xroP~ r 4'L VepS
..... A . .-.
aw~.-
-0
Flgh 5----~- -9A Full- Rudr Siesi & ~ -~-- Reeae An- Back-Up-Mod
Fligh #3-- -Intumnato Dat
OeE S -.- ~ . . . ,~ d~ 66E
\Jj LclLrSjL$/Aav
me.- - -,mu

hda nD JSO O A 60, . .. . ..
-ao &,404
#.T--i T .---
Fiur 5-B Full Rudder, Siesi & ______ Releae,____Mod
Flighta. #3 72 . -ntumnato DatAedssA~RSrA .- .-.-67 ~

Aiort .w-I Amos*
44,
-0
-0-
1 .1. .tDjS4.d, aidw r
IT .- I
-- .. I ,, '4JWAaS ASIA .. I
Figure 5-10A. Sidesli ps-Pulses, Analog Back-Up Mode -Flight #3 Instrumentation Data
68

,ciUdi r 13 2-3 -ASI
AWra.. 4Ai~~
- "-Ia. _- T t More&-ii dw-'--7--0
- ' 2 ~.-----.. - - - - -*.1 .~.- -- -
-7 7
* 4jat LA,o A#5t
0 A..~
*. ~ ~~~ 7- jf. . . . . . . . . . .
I T
* IX
-- 0wccAwoo ,
Fi gure 5- 10B. Sideslips-Pulses, DFBL Mode -Fli'ght #3 Instrumentation Data
69

ALrTrUO . &0, aep r ,A4pff5oa " O*AS .i
A"1YV CoaTx VPVf . ~i . ... ...
e r,*. dol- 0' ms -
44
04csw " 1 4 -
IIOTA.-.o -OU
_ _
-- - -- - - --74 -~ - -
_7 1. -_-,__ _
Figue51C Rudde Pulseswa' & Doblts -. B Mod Flgh #3 Instrumentation/ Data
NVD*AMI'70

I
Examination of Figures 5-5A thru 5-10C shows excellent correspondencebetween the LODT and LVDT outputs during both control modes and all yawmaneuvers. Response in the ABU mode (Figures 5-6A example) exhibited acritically damped system having no overshoot with a maximum slew rate ofapproximately 7 inches/second (17.8 Cm/second). Response in the higherbandpass DFBL mode (Figure 5-6B example) exhibited a slightly underdampedsystem with a maximum slewing rate of approximately 12 inches/second (30.5Cm/second), or about 80% of the transducer's maximum required slewing rateof 15 inches/second (38.1 Cm/second).
71L[
I .. .. -. . . .. .. .. .. . . - -

This page intentionally left blank.
72

I6.0 CONCLUSIONS AND RECOMMENDATIONS
The Linear Optical Displacement Transducer (LOOT) represents a viableapproach to EMI immunity in advanced aircraft since the transducer itselfrequires no electrical power and transmits digital position data viaoptical fibers. The results of the flight test evaluation demonstratethat the LOOT and its associated Computer Interface Unit and Fiber OpticsCable performed satisfactorily and reliably as the active position feed-back device in the directional flight control loop of the T-2C airplane.Laboratory frequency and step response data with the LODT in the feedbackpath of the AFCAS actuation system indicated satisfactory and identicalperformance with that obtained with a conventional LVDT. Operating timeon the LOOT equipment was in excess of 25 hours, which included laboratorytests, aircraft ground tests and 3.6 flight hours, with no failuresattributable to the LODT equipment.
As with all developmental devices employing new technologies and pro-cesses, improvements, from a user's standpoint, can always be suggestedand are presented below.
1. Overtravel Digital Output
The digital output in the fully extended position where all binary l'sare present, changes abruptly to all binary O's in the overtravel. Allbinary l's should continue throughout the extended position overtravel topreclude erroneous full scale commands to the system in the event thetransucer is driven into the overtravel.
2. Transducer Fiber Optic Receptacle/Housing
The fiber optic receptacle and its housing add considerably to itsenvelope. A circular end connector arrangement would not only reduce theenvelope but also remove present limitations in actuator mounting orien-tation.
3. Rod End Attachment
Provisions should be made for a simplified "floating" attachment tothe actuator piston rod similar to that used on LVDT's.
4. Fiber Optic Cable Connector
Installations in aircraft are typically densely packed and most oftennot easily accessible. Many times a connector is mated to equipment by"feel" only. The fiber optic connector is secured to the LOOT by twoAllen head screws which are difficult to tighten, and the Allen wrench, ifdropped, would be difficult, if not impossible, to retrieve, creating apotential hazard. A circular MIL-STD type fiber optics connector wouldalleviate these problems.
4
i 73
' ' - -.. .......... 1' '"11 ......... . ' .... " ' "- ... .. ' "' " ... ........ "..,.,........,,,..............'..-......"*

5. Computer Interface Unit (CIU)
Significant reduction in the size of the CIU and a reduction in thenumber of interconnecting optical fibers through the use of serializeddata would be highly desirable features of future generation opticaltransducers.
74

I
REFERENCES
Reference No.
1. NAC-TR-2334, Development of a Prototype Linear OpticalDisplacement Transducer for Flight Control SystemEvaluation, United Technologies Corporation, HamiltonStandard Division, Contract N00163-80-C-0080, August 1982,Uncl assi fied.
2. NR72H-240, Feasibility Study for Advanced Flight ControlActuation System (AFCAS), Rockwell InternationalCorporation, Columbus Aircraft Division, ContractN62269-72-C-0108, June 1972, Unclassified. AD 767 058
3. NR73H-107, Control-By-Wire Actuator Model Development forAFCAS, Rockwell 'International Corporation, ColumbusAi-rcraft Division, Contract N62269-73-C-0405, January1974, Unclassified. AD 772 588
4. NR7SH-l, Control-By-Wire Modular Actuator Tests (AFCAS),Rockwell International Corporation, Columbus AircraftDivision, Contract N62269-73-C-0405, January 1975,Unclassified. AD A-006 371
5. NR76H-1, Design and Fabrication of an 8000 psi Control-By-Wire Actuator for Flght Testing in a T-2C Airplane,Rockwell International Corporation, Columbus AircraftDivision, Contract N62269-75-C-0311, January 1976,Unclassified. AD A024 487/ICI
6. NAVAIRDEVCEN 75287-60, Flight Verification of the AdvancedFlight Control Actuation System (AFCAS) in the T-2C Air-craft, Columbus Aircraft Division, Rockwell Internationalorporation, Contract N62269-76-C-0201, June 1978,
Uncl assi fied.
7. NAVAIRDEVCEN 78207-60, Flight Verification of Direct.Digital Drive for an Advanced Flight Control ActuationS stem (AFCAS) in the T-2C Aircraft, North AmericanAircraft Division, Rockwell International Corporation,Contract N62269-76-C-0201, November 1979, Unclassified.
I75
7-

8. NAVAIRDEYCEN 79156-60, Design and Test of a Hydra-OpticFlight Control Actuation-System (IIOFGAS) Concept, NorthAmerican Aircraft Division, Rockwell InternationalCorporation, Contract N62269-79-C-0709, September 1979,Unci assi f ied.
9. Rockwell Letter 82CL 1797, Summnary Report of a FlightEvaluation of the Direct Digital Fly-B3Y-Li~ht ActualionSystem, North American Aircraft Division, Rockwellinterniational Corporation, Contract N62269-81-M-3030,March 1981, Unclassified.
76

I
APPENDIX A
MICROCOMPUTER ASSEMBLY
The microcomputer used for this program is based on the Motorola MC6800microprocessor. The assembly consisted primarily of the MotorolaMonoboard Microcomputer lA (Micromodule A) which is a complete computer-on-a-board, plus Burr-Brown D/A and A/D converters, and a Gray-To-Binarycode converter, all mounted on a mother board and housed in a singleunit. This unit, shown in Figure A-l, contains all the interfaces andwiring required for the processor.
The heart of the unit is the monoboard microcomputer which has thefollowing features:
- MC6800 Microproce-ing Unit (MPU) with associated clockoscillator, power on reset timer, and memory decoding logic.
- 1024 Bytes of RAM.- Sockets for up to 4096 bytes of Alterable Read Only Memory (AROM)
or mask-programmable ROM (Four of the 2048 x 8-bit ROM's may alsobe used if the proper jumper connections are made, thus providingover 8K of ROM on this module).
- One RS-232C compatible interface that utilizes a single MC6850(ACIA).
- Two programmable MC6820 PIA's that provide 40 programmable Input/Output and control lines.
- Address, data, and control bus drivers to interface MonoboardMicrocomputer 1A with other modules in the Family or with anEXORciser.
- TTL signal level inputs and TTL signal level, three-state, or opencollector outputs.
This monoboard microcomputer is shown in block diagram form in Figure A-2.A photograph of the board is shown in Section 3.2.7 of the main report.
The MPU is contained on a single chip on the board and is the MotorolaMC6800 MPU. The complete instruction set is given in Tables A-I, A-II,and A-III.
The A/D, D/A and Gray-to-Binary converters make up the other three circuitboards in the microcomputer assembly. Figures A-3 and A-4 show the blockdiagrams of the A/D and D/A converters, respectively. Characteristics ofthe A/D and D/A converters are given in Table A-IV.
To incorporate the Linear Optical Displacement Transducer (LODT) andComputer Interface Unit (CIU) into the T-2C Digital Fly-By-Light (DFBL)system, modifications to the microcomputer assembly were required. Thesemodifications Included:
o Addition of a 22-pin electrical connector to interface with theCIU.
7
!wn

4.,
CL
SS
5 23
780

4--'
tniC) C:)
C> E: X
CL CL
=. CC- 4 =4) C

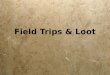
Table A-1. Accumulator and Memory Instructions (MC 6800)
&OGRISIIG W-GOES OOIANARITHMETIC OPERATION CONO CODE REG
iMID DIRECT INOIX 111140 (ASlI ruepit. Ibds 5 4 23 2 It 10
OPIERAIIons UMEINIC OF - : OF- o - 2OP OF 1-VI I
AdADDA 3 2 25so3 2ZAS 28B84 3 A.MA 01
ADDS CS 2 Do 3 2 EDB 2 I's A 3 %-M . I f I
Add Ac"4I's ABA te 2 I A-# A
Add .16 .C..v ACCA #852 2993 2 A95 25394 3 A 1..C -A
ADC CS 2 2 09 3 2 E9S5 2 F9 4 3 I*M.C I
A.4 ANOA 142 294 3 2 AdS 2864 41 AM-A .0 80A
ANDS C4 2 2 04 3 2 Ed4 2 F4 4 S BM .8 0 A a
Bo ThiI SITA 85 2295 3 2 AS5 285 43 A-M 00 A 80
SITS C5 2 205 321ES552 543 S M 0 0 g 80
am CLR 41 1 2168 1 00 _M .080 S R
CLIA 4F2 I 1 0 -A 0 A OSR8 1
CLR8 SO 2 1 00 -S 00A SRaB
1MPA $1 2 291 1AlS I111 43 A-U .
CUP$ C11 2 0,3 21152 1 3 %_ *11
Ceittwor AC.4lfl CSA I I I I A-B60
COMA 41 z A X-A. I I' 1 I I s
tout 53 2 1 1-8 1 t 9 S r
(I6mpte) PIEGA 40 2 1 00 - A S
AEG# 102 ?I 00 -5 B -a11I0j
Owins dga*..$A DAA Is 2 I Coaiwis 6-.n4' Add oft CO Chs,60irn .St CD Poimal
DIC4 Of A 1lilA 8 3 U - IM 01
DICA 4A 2 1 A-1-A .t0 04
DICS SA? I 1S--85 .0 4,1
E. k, O EDNA IS 2 2 98 3 2 As % 2 88 4 3 ARM -A SO 0 t
[OR$86 52 2 03221E85 21F843 GV-S .0
INC It 7 2 7C 6 3 M . I I
$%CA 4C 2 1 A-1-A t*
INCOSI2 8.1-B
0,uI.dmw. OA &A229A 3 2 AA S 2BA 4 1A-M-A
DRAS CA 2 2 DA 3 2 IA 5 2 FA 4 3 B Ag-8
PM0%PSllS 3? j A B- SP. S- I-~ Sp a
ma1 0I.tSIA2 4 1 8AUSP. SP-1?IP 0SP
Ads0. DoPULA 32 4 1 SO -I- S. MSPA -00
Puts. 33 4 1 SP- SO. MSe- a 41
Alan L101 O B 2 791 3 M0 0
RO 54,11a C 1 50 .00
Ron..EI I0S 15 2 76 9 3 48 lR O11A 58 2 1 A bO
Lek Ait. A.11.ft AL IS 7 .31
AStA 4S2 1 Si 0 00
£51.551 9 C by MY*0
P*Nh ok tg ASRS 41 1 21 70 1
A1 R8 44 7 3 9 4 1 AM * 0: X
AS $by b C *.0
Shih.c4r MotA Lo7 4S S2 A 2 741 3 a *-U t
STAS~~4 01 "1115 5* 0 8
SSA 882 21 2AE05 21F7043 S-1111 a001111
S11111t ClB 90 2 00 3 2 AO S 2 60 4 3 2-I 5 -- A0 s, 1
Sfctc Av9ittor. IR 1O 2 1 A -8- A *I0l
5IS. t afy BCA 12 22 92 3 2 AlS 282 4 2 A-U-C-A .1?
TI 607 1D I M-W AT5 405 A22 2 2 2 2 4 S--C4 00
ISTS 00
U SING: DOITIID Co DE SYM OLS!
IW..6w 9 Vigil C.., 2.013.s IacI.S.- 08. H Hall-wtv 110 6 3,
wefo S..4 0 go %Nis 10c4 V OW1iOW. 2i's 01
U5 , Coaw~..6 V_ I,,,i.o 0."Old I, hq Sixt, P""W~. C C o 9 ,v 0 . 18 PAvt Aloavs
Abd, Atw":Ijo .d~h,1 .800 fttt~i6 , ,,dld .0 the C6101 s" ImpL'ID .4001 i 00V
I'st .Odtis W1 iv. .4 tW j .11 v
80
GINNIE

Table A-II. Index Register and Stack Manipulation Instructions (MC 6800)
CONO. CODE REG.
IMEG DIRECT I INDEX EXTNO I,,PLIE0 s c" 3 0
POINTER OPERATIONS MNEMONIC OP OP OP OP - = :OPF' BOOLEANIARITHIETIC OPERATION I H 1I ! N Z V 'C1 ~J
CompaelndeReg CPX SC 3 3 9C 4 2 AC 6 2 eC 5 3 XH-M. XL-iM*II ' .Oecrementl Index R" OEX 09 4 I X -I -X Iis' 1ODuesnent Stack Pntr DES 34 4 1 SP-I-SP e1• *!***IIncement IndxR" INX 08 4 1 X*-X " o :.1 ,Incremmnt Stack Pnt INS 31 4 1 SP+ I -SP O i ItoadlndesRe LOX CE 3 3 DE 4 2 EE 6 2 FE 5 3 M-XH, IM.1XL RLoadStackPnu LOS ie 3 3 9E 4 2 AE 6 2 BE 5 3 M-SPH.(M I)-SPL 101 ® :lR S
SiorelnexRes STX OF 5 2 CF 1 2 FF 6 3 XH-MXL'-(M*1I oIof(.4? R (SloreStack Prtr STS 9F 5 2 AF 7 2 SF 6 3 SPH-RM.SPL-tM.T)
lnd IReg- Stack Pnir TXS 35 4 1 X-I-SPStack Pntr -Indi RAg TSX 30 4 I SP .I - X * • *,S
Table A-Ill. Jump and Branch Instructions (MC 6800)
CCNO. CODE REG.
RELATIVE 1140EX XTNO1 IMIPLIED S 2 1 1 (.OPERATIONS MNEMONIC - OP iOP 1F BRANCHTEST H I Z V CBranch Almys - BRA 20 4 2 None 0
Sadmb it Cam Set SCS 2S 4 2 C"I 0beaach It -Zone 560 21 4 2 Z-1 is 5 0 0 0 0Branch If Zoo 4 GE 2C 4 2 N Q V0 0 0 0SranchIt>Zero SOT 2E 4 2 Z+(N(9V)B 1 & 0SianchIf Nigh, 0SHI 22 4 2 C ZS *0j060Branch ItIZero OLE 2F 4 2 ZtIN 'V)' * 1 .BranchIfLowerOrSame SLS 23 4 2 C#Z-I 0. S
Beanch f<Zwo OLT 20 4 2 NCV-I .':• :: :ianch If Mimes SUI 28 4 2 N1 4,1 ml• 0
BranchllNotEqualZero SNE 26 4 2 Z-0 e * • *ianchIf Owrtlow(Cear BVC 28 4 2 V-0 * 0rach If Overflow Set SVS 29 4 2 V-1 • •0 1 *
Branch llus BPL 2A 4 2 ".0Seasich Te Subroutine SSR sD * 2 1:Jump JUP GE 4 2 7E 3 3 Set Special Opqrunsr41jump toSubroutie JSR AO 5 280 5 3 610 1
no Operation NOP Of 2 1 Advances Prof. Cri,. Ony 0 0 0 0lRelsn From lIlfruN RrI 38 10 1 - -0
Return From Subroutine RTS 39 -1solies Inenlrupt SI 3F 12 1 See Special OperatonsWait IVe Interrupt. I WAI I ILII II3E/ )
*WAI pull Address Bus. R/W. and Oats Bus in the three state mode while VMA s held low.
81
- . ." : ' . ..." " .. ... ... .. ... . *.. . ... . i ll ... .. .. . . . ..

C SOM853 DATA ACQUISITION MODULE
C A1A ANALOG.0 MULTIPLEXER 6
UITEL ADDRESSR ii ' DECODER
B VMA -INSTR UMEN-U /--- CONTROL AND TATION.S TIMING LOGIC AMPLIFIER
AON SAMPLE/
INPUTAOaI S'*SVDC DC/DC MUX
CNETR 3-STATE ADz 1 4 MSU'S AID CONVERTERORDI MODFL-546 OUT
-lIVOC 4+ISVDC .
Figure A-3. Analog-to-Digital Converter -MP7208/7216
.SVDC Oisvoc _______C
CAD CONVERTER T50 /MODEL_54 cJCONVERTER
VNIA __ - A8 1
AIA
A NDO T 0/A A
1 i3c CON~VERTER LH DAC8O 2 0m OAC ISTROBE G
I A2 IOF 4C Al * DECODER DAC 2STROBE -02
R AND WRITE DAC 3STROCE Lu
CCONTROL DAC 4STROBE A 0/A T0 02-+--+ CONVERTER
H IDOI _ ACGO U
T COVETE
04sa CU H DACSED
4 MSB'S
Figure A-4. Digital-to-Analog Converter -MP7104
82

TABLE A-IV
CONVERTER CHARACTERISTICS ANALOG TO DIGITAL
NUMBER OF CHANNELS 8INPUT VOLTAGE + 10 MV TO + 10 VINPUT IMPEDANCE TOO MEGOHMS-RESOLUTION 12 BITS BINARYCONVERSION TIME (+ 10 V) 33 MICROSECONDS
DIGITAL TO ANALOG
NUMBER OF CHANNELS 4OUTPUT VOLTAGE, VDC +2.5, +5, +10, 0 TO 5, 0 TO 10OUTPUT IMPEDANCE T OHMRESOLUTION 12 BITS BINiARY
83

o Addition of a Gray-to-Binary code converter circuit board. Ablock diagram of this board appears in Figure A-5 and detailedcomponent and interconnection information is provided in FigureA-6.
o Addition of internal wiring to interconnect the electricalconnector, Gray-to-Binary code converter, Peripheral InterfaceAdapter, and D/A converter.
84
-

C) _ ___
CICcro
C~j -C.J
0
LUU
-isC..) 1 LjJS_ui -l
cc D
C-)
0.41
cz LD
ixwL LUJ LL LLJLaJ LJ LJ ~ LA 2 L= . =- = -tC= L. _
".- 4 LUi~ Lii 0- LL.-Lf
0L Lii C Lii
77)
U :I--
[ 85

o 2
Ii' Ii -.
HI -
27~7
a S..
a - tO
1 "~
_____ ____________________ C
- I'
_______ C
S..--- I w
C0
-s fl-Sin
Ca-v0
L)
S..
C
0I-
0)__________ I..
=
86
I

APPENDIX B
DIGITAL FLY-BY-LIGHT AFCAS/LODT
FLIGHT PROGRAM SOFTWARE
i87

uF'
LAJ CD
ou cc
z CD J
Ad ==0< -Z=>
I 4ZC-4 w
0--JE-' -a
,-uJcJi0
S0 x XX XX XX xX0X>4
E-I
ccn
0cU,
cmcLn W W. W L W ow o
08

CAj
LAJ
ULJ ~ LIJ
LL 0 I-
LL =~~ a i
. ~ ~ L. La1 (AL 0(L. J V- V) 00L LJ
LJ ( C.) C4 L.) Oi :3 >
-~C <-0 - .LaJ LiJ 1(A L 0 W
_jl C) ClO. LLI LJ C)J C0=-. U- = CD -
Q.~ LAJ LLJ L&J CL0
LnCD- LJ c C LJLaJ = u = " - j >- ~- LaJ .
C). 0Z LL L I -i I- W L --j i 1 V-I V- i= V) . VJ V 0
4k I
z
Iz) to
Z 0 -
_jLIL.U or . - %r zr.% -W WWk
0
I-I

LL. L- C
*J LiJ LaV) -m
=- I- = =
CD - RAJ I- )= 0 -4LLJ = 0 V) V)-L'"V
L .) I LAJ V ) C ). LU C . 4 ' 0. V)4 = Y C*J CL *- c/ CL C) 4V.
o~ ~ ~~C CLL& a-- ()0/~0.
CD CDo C. D0 M 31 LL. -j L L0C LA-.a- L Z: M 0L.L C OLL. C-4 CD
- cm C) LL- 0CO I=- cci- C) CD L. M n(AmV
-: 01 a LC) F C.. 0: Li.C/ CL FJ0L ) I-J 0 LJ U 0.=I- I
<.I ui C)<<C - - <. Cii < L-C i
CD O.c < I- Ct- Lii L61 C) F-OC F-C
w~( CAIJ~ L&J 0 < ~I-i (A. J
1-4 znt L
F- F- In J Z2 i m D InC)F =F-V13 -jV ( m C.1 j (n. j A j w 3jm j=V njV
U3
CV %Q W cn" l QL)L 4q wOjmqrq" - 4q*-rC%l -r q WC.J
C.) C.) COC I 1 JeC. 0 C'1 1 1 Aj I I CD I( NI I .
CL . 0 ~- ~ % , L J L r
LL L L 0C Cr A .WPWW% 3Wk l .. rco en L L .. C % O0IL 0C 0 WC40, ac u O O .. U
CA.
090

TRANSDUCER(U) ROCKWELL INTERNATIONAL COLUMBUS OH NORTHAMERICAN AIRCRAFT OF. E J SOLOMON MAY 83 NR83H 20
.. T-39NOP-2C 0232 F/ 1/4
ENCEEEEEIEDNhhhIIhhhhhhlkkso

L 36
liiiN 1jj.8
11I11IL 25 11111 1.4 111111-6
MICROCOPY RESOLUTION TEST CHART
NATIONAL BUREA Ii Si ANDAF?[)

LO1
-+
hii
+1
o Dt
0-- I- I- Dca a wf &
Ui ) V . tJ U LJ
oD Uj .i U)
t0 L&" Us f= f 0
I-- JU)U Z w O 0
01-I F .Jc LLILI LJ
U3
tor -2
C~ Nt4wCj n4NLnL) 0C~ %40
ce.
cn 0 0(1IIe-) 9 1 Q cn I I
ad I"1 tU )o40 0,I R
CD0 4 %% -% -I D 4im-
0 W 4 ( L. J L.LL 1OD 4e.
z-U
sE ILL C O Ch U.CY q I
01uc ic iuuc
U) 91

L. 00
Q- QI- ICIO) U) (L
Q = 0D = 0)
as 00~I 0.10 C)
OZ w. Q.. -lit w CJ0
al Lf O CD 40 0n 1 C L.
z
u 1u wuW L f)f- .)f3 )w003
*92

IcQc
-I CL 0l a
L&cI aI-m L
mumKcd-U< -M =unju a racv0
CM CY- 00C)C)c M4 w4 i
Ln L 0 0 UO9).. L IJ.ILA)
00 4W %0 M
r-I 0 iat Wsoi& wa:: a CI
"0 2m 92' Q Q Lai i= i
93
-. 1. -

h3z
1-4
S
oA
10
I M4"cw C u %A wi
N NK
I. Ow cifhO I I IN
~ -~ 94

TIF
LJ
Q z
CD- 0 0
0D LaI- J
440 0 0 DC
cr LLI- -. LL V) La. La. (t)L&J wJ 0) 0D
CD0 LL -o L.0C 0'-4I-- I-WLJI-f- I-I CD-9- I
40CL.
*'a < CIO -j V s) - n CA cc -i -j = cc
ul
M - "4 % W0 aOC'10 LO 47 0C- n J
to to2 .r oG oG tr -r oa oc(W.
ccU to
doA yimm nZ
zI

I..I
Q is i =
LAJ ~ z :
to0
to V
%C % D -r CO CO COC nC sr --0 D0 10
U~n Ud mcmq n *w e*41 0 w 4t4 4 r4d
Wo of, 10 -la ii-% 0 1
-F& %D W* fn P. rlamV Q O C0 nd 0 0 aU0Qr
0 9..
Ln ~ ~ i l c$toc%0 . 0 0 rf ,.ff.r-
I- - * La. u.C.DU.. La96C

r-
w 3.w- l a6 I.- w
too
P. v r.s ml o UO
LI.-
ok mww. Q<Z -
*i w- .4 cD- AJL.%
1=I 3Qc L cm IimQi
97I

I-.i
04
I--
C Q
=LLLL.
a.a
U,
S% 00 ,,
I.
1*4QI I ZII i wim im Qim 0 c
P l u a. I - w . L j o
~ C98

41 c
a N
Q c=Cz 0=U0
I ~ ., - L"-0 . - 0 La 0nM0LL C
Za-4
W& GOC A00 D CJ000I VMM4
coU)
~0 'w .UnL6 LAL ) 0 r- 3,) r 3 00 LL. ~ 0 0 g
_j 9- LL %9r 6 C90r-C I L r0- WO UJ)EMOMIJ4 GKl 0
9-4
=O%.W I0 W W
100
U99

I..'J
ce.- P-La e 0I-I- L-
~~Lm-
0~C w- N- =- u~ i - C ~ I
cm u0 0. a 0;
OZOZOr
X m-tC4W . rli e ~ Id ~
00

0i 0 .= I- - C) VCIaj% 94 P.CL c - -
cx - CL a V a 0 C.0 0= I- = a- oc
L16 =J u~ = I--~0 =P
cliLL - r0 LjLLI LJI LP 4
CL 0 n - M -
V,
ma 0 -1 ii ii Ii 0.11a w
V) W
z
10

I-.-
CD a U (DJ CD LU- QJ0- ~ L
LL~ ~ 10 a. U. V)
0 . r- 0 0 4d.L w D~ a D LL .
enI' I CD 0 40 1LLaJe
%C CS.4 - a*a ( LL.<L W~r L..-.. 0 L)LLaV) 400- U0 D 0C t 0 LL CJ 00 - LA
1.4
E -.
Cc C.
00
--AA

O000CE3430 FE0 F 6I3 64 7 4 1 6 3C 73400110O1 7 4 3861F . '/f72,E -CDF I4 60020817£5U 61A26j6 43 4 36C3700300i-E-c~D53 FP CB 0 :FF--0040ZZ:'F -F32965C2E16 6EC3 E77)D0050soec0f' *i 5C86 4 A IZ 37 1Lc7 36u40060 212B137-FAIC 1 1 D752BG )Z100'7097153 v 2 F F4j57 6; 7 2 ;75 C6 34Y70 00 08 42 1 6 3C 77341- 43 F ?0 5 CjE6 'A
0902AV 6 e E 1'~ E1 3~ Z Z=75-2 000fi. 52-17 E? C 0" 2ZO673 2 ZO
060 73I0 0 30 WO 13 B k24P C~6 I
001JO .57146) 7 79 ' 1 66 8 ,311ir230OO8 4~ 7?63i 4 z6~4> - 5 7L56j7Ft10 5700Fr067~ 03 4 :0 1 31 UFri7,66 63#T767 1;200100:26 4737 61 1 3C4rC G IC )6'53=7 6704&*.G66j7FI10-7 6 20 A!,)'~ I I 7F97' 71C6O('10,7~ 6' D I01AS7F4A. 66-iA
0 ' ;FD .e7,0 72 1 2 67.2i '2AF 2 0
0',60 EC 32 F 4 - -IF'Z 6 F 6654V30.1,61010 4 B13-E 43PF -42012 SE'
0,,01 ) E C 014, I I I IM3710 1.~~7Z
01IB024~ 4,61 0 6IbI 7 i5.4iD6'5 Gj5 3 Z:54
022 E0 01 ml 1 3~l1 1 I47 I 019653 -- 10'41F24 67 46 6~1 31Is'~4 F7~ 10D~6~I~0026 6 3f 7f3 6~E 4p. r
0250EF 6O6660% F F492V 7EI 5
Figure B-1. Digital Fly-By-Light PROM Map
103

This page intentionally left blank.
104

APPENDIX C
GENERAL TEST PLAN/PROCEDURES
FOR FLIGHT EVALUATION OF A
LINEAR OPTICAL DISPLACEMENT
TRANSDUCER
GENERAL TEST PLAN/PROCEDURES
I. TEST PLAN AND OBJECTIVES
II. GROUND TEST PROCEDURE
III. SYSTEM DESCRIPTION AND PILOT INFORMATION
IV. FLIGHT TEST PROCEDURE
V. FLIGHT INSTRUMENTATION
105
- p .. &

I. TEST PLAN AND OBJECTIVES
This document describes the program test objectives, the aircraft groundtest procedure, and the aircraft flight test procedure. It also containsdescriptions of the system operation and the flight hardware. The primeobjective of this program is to evaluate optical control of a direct driveactuator. This program uses a specially designed optical feedback sensorand an optical command system to control the direct drive rudder actuatorof a T-2 aircraft. Approximately three hours of flight testing will beaccomplished at the Columbus, Ohio facility of Rockwell International.
This test program combines the assets from two Navy programs for a flighttest demonstration. The actuator which was developed as part of theNavy's Advance Flight Control Actuation System (AFCAS) is combined with aNavy developed Linear Optical Displacement Transducer (LOOT) to opticallycontrol the rudder in a Navy T-2 trainer aircraft. The AFCAS has been ajoint undertaking by the Navy and Rockwell International Corporation forseveral years. Earlier portions of this development program haveestablished that a direct-drive control valve and building blockconfigured actuator can be readily integrated into a computer-operatedcontrol-by-wire system. The most recent test program demonstrated the useof an electro-optical commnand system from the computer to actuatorelectronics.
This program tests the operation of the rudder control system using adigital-optical feedback sensor in place of an analog-electrical sensorused on previous tests. (The system is described in more detail inSection 111.)
The system will be assembled and operated in the laboratory to ensureproper system operation prior to aircraft installation. Following thelaboratory tests, the system will be installed in the T-2C aircraft.After installation, system ground checkout will be performed, andinstrumentation operation will be verified. The aircraft will then beready for flight test.
The flight safety features used for the previous AFCAS flight program areretained for this program. The two main features are:
(1) Limit rudder travel so that a safe landing can be made with a"hard-over" rudder.
(2) A bypass valve which permits the rudder to trail if hydraulicpower is lost or system is switched off.
In addition, the microcomputer will be self-monitored. In the event thecomputer detects a failure or the pilot turns off the fly-by-light system,the directional control will revert to the analog system. Additionaldiscussion of these features is contain~ed in Section III.
106

I
II. GROUND TEST PROCEDURE
CAUTION: Stay clear of rudder during test. In this configurationthe rudder is a hydraulic powered system. The rudder willmove rapidly with full force.
1. FILL AND BLEED HYDRAULIC SYSTEM
A 3000 psi ground cart containing MIL-H-83282 fluid is required.
- Before reconnecting AFCAS actuator, temporarily connect rudderactuator pressure and return lines together. Hose and adapterfittings provided by Department 871.
- Attach ground cart pressure, fill, and suction lines to aircraft.
- Apply 85 psi at fill fitting.
- Bleed air from heat exchanger bleed port located at the upper leftaft corner of heat exchanger.
- Bleed air at pump suction, pressure, and case drain ports.
- Disconnect ground cart.
- Reconnect pressure and return lines to rudder actuator.
2. SYSTEM CHECKOUT
2.1 Hydraulic System
- Connect 28 VDC external ground power supply cart to aircraft.DO NOT TURN ON AT THIS TIME.
- Apply 25 psig air pressure to reservoir. Use nitrogen bottlewith pressure regulators. (Furnished by Department 871.)
CAUTION: Operation of the 8000 psi motor-pump unit withoutengines running requires external reservoirpressurization. Apply nitrogen pressure through acapped tee located near the reservoir pressureregulator.
- Disconnect power plug from EDU Recept J4. Disconnect bothconnectors from the microcomputer Recepts J2 and J3. Connectplug to heat exchanger blower.
- Disconnect connector from microcomputer power supply.
- Apply 28 VDC to aircraft. Turn on #2 inverter. Heat exchangerblower should be running.
107

- Turn rudder hydraulic power switch "ON" in cockpit. Observethat pressure is 8000 psi on cockpit gage. Look for leaks(especially at actuator).
- Turn off rudder hydraulic power switch, #1 inverter and 28 VDC
ground power supply.
2.2 Electrical Analog System
- Connect J4 on the EDU to the A/C harness. Connect J3 on theEDU to the AFCAS test box provided by Department 871.
- Turn on 28 VDC ground power supply. Verify DFBL switch is"OFF".
- Turn #1 inverter "ON", then turn rudder hydraulic power switch"ON". Motor/pump should be running and EDU should be powered.
- Cperate rudder pedals. Assure that operation is satisfactory.Rapidly oscillate rudder a sufficient number of cycles (atleast 25) to remove any trapped air within the rudderactuator. Note sensitivity and dead band.
- Apply full right and left pedals. Measure and record rudderdeflection. Maximum right and left rudder should be 12 + 1/2degrees. Determine that rudder return to 0 + 3/4 degree-s withno pedal force.
- At the AFCAS test box, measure and record the voltages shown
below with no rudder pedal comnand.
Description Required Voltage
Actuator LVDTOutput Voltage 0 + 0.200 VDC
Force TransducerOutput Voltage 0 + 0.250 VDC
Valve DriveOutput Voltage 0 + 0.500 VDC
108

2.3 Microcomputer and Power Supply
- Turn DFBL switch "ONT . Observe that DFBL light is "ONu.
- Operate rudder pedals. Assure that operation is satisfactory.
- Apply full right and left pedals. Measure and record rudderdeflection. Maximum right and left rudder should be 12 + 1/2degrees. Determine that rudder returns to 0 + 3/4 degree withno pedal force.
- Measure and record the voltages shown below with no rudder
pedal command.
Description Required Voltage
Valve DriveOutput Voltage 0 + 0.500 VDC
3. MONTOR CHECKS
- Remove one of the two fiber optic lines between the microcomputerand the EDU (Electronic Drive Unit).
- System should continue to operate. However response should beslowed and large or repeated inputs could cause system to monitoroff.
- Reamove second optical input.
- System should monitor off. DFBL switch "OFF" and DFBL light is notilluminated.
NOTE: If system is extremely well nulled, system may not monitor
off until slight pedal force is applied.
- Reconnect optical command lines.
- Reengage DFBL (DFBL switch to "ON").
- Turn rudder hydraulic power switch to "OFF".
- Verify that DFBL switch goes to "OFF" and DFBL light is notilluminated.
- Manually move the rudder surface and verify rudder free to go totrail position with hydraulic power switch off.
CAUTION: Be sure hydraulic power is off before attempting to movesurface.
1!109
L I .. .. . .. . , . , ;:_ ---" . , .

- Reengage rudder hydraulic power switch. Turn DFBL switch to "ON".
- Cycle rudder pedals to ensure correct operation.
- Turn rudder hydraulic power switch "OFF".
- Turn #1 inverter "OFF" and remove external ground power.
III. SYSTEM DESCRIPTION AND PILOT INFORMATION
The system functions the same as the Digital Advanced Flight Cont,Actuation System except the digital command and feedback signals a 'wtransmitted optically instead of electrically. The command system hesame as the previous fly-by-light program. The actuator feedback h enchanged by removing one of the LVDT feedback sensors and repla'a Linear Optical Displacement Transducer (LODT). In the fly-'mode, the LODT supplies the feedback signal while the remainiused as a system monitor as well as providing data for instrumt,..To the pilot, system operation should appear identical to the pre.systems tested.
The Analog Back-Up (ABU) mode is still retained using the remaining LVDTfor feedback. In the ABU mode of operation all optical equipment isremoved from the control loop. The ABU performance, as seen by the pilot,should be unchanged from previous programs. The rudder system componentsare:
- Electrical Motor Drive Pump- Rudder Actuator- Electronic Drive Unit- Digital Microcomputer- Force Transducers- Microcomputer Power Supply- Linear Optical Displacement Transducer which consists of
o Sensor Unito Computer Interface Unito Fiber Optic Cable
The aircraft configuration is very similar to that used for previousrudder control system tests. The original mechanical cable system betweenthe rudder pedals and the rudder has been modified to incorporate thecontrol-by-wire system. The rudder is controlled by a direct drivehydraulic actuator. The rudder pedals operate a force transducer andtherefore have very little displacement.
When the DFBL is selected "ON", the electrical signal from the forcetransducer is sent to the microcomputer. This signal is summed in themicrocomputer with a feedback signal from an LODT mounted on the rudderactuator. The summed or error signal is converted to a digital PWM (PulseWidth Modulated) drive signal. The digital error signal is transmittedoptically to the EDU which power amplifies and drives the torque motor onthe rudder actuator. The torque motor drives the control valve on theactuator.
110
... . ... I l llllllllll~lll llll~llI I

When the DFBL switch is "OFF", the force transducer command is transmittedI directly to the EDU which powers the torque motor which in turn drives acontrol valve on the actuator. The EDU contains redundant circuitry whichprovides high immunity to system failures. This system is illustrated inthe functional block diagram of Figure C-1. With the DFBL switch in"OFF", the digital computer and the optics are still operating but do notcontrol the rudder. However, it is possible to obtain recorded data onthe optical sensor performance with the DFBL switch "OFF".
The system with the LODT installed will operate the same as previousDigital AFCAS programs with the same backup modes and emergencyprocedures. These features are discussed in the following paragraphs.
The rudder actuator has a pressure operated by-pass valve which permitsthe rudder to trail if hydraulic power is lost. In the event of a "hardover" type failure, the pilot can cause the rudder to trail by turning the8000 psi rudder hydraulic power system switch to "OFF".
The rudder trim system is unchanged. Trim response will be different,however, due to the change from a manual to a fully powered rudder. Theyaw damper system has been disconnected.
Maximum rudder displacement is reduced from + 25 degrees to + 12 degrees.This reduction will permit the pilot to lanCsafely with a ' ard over"rudder, opposite engine out, and a three knot cross wind. Therelationship between rudder displacement and pedal force is approximately7 lb./deg. of rudder movement (+ 84 lb. for full travel).
Because of the additional load imposed on the 28 VDC generators, themotor/pump unit can be operated only when both engines are running. Forthis reason, the unit can only be turned "ON" with both engines operating.
Modifications in the cockpit area are as follows:
1. 8000 psi hydraulic pressure on the rudder actuator and electricpower to the EDU and microcomputer can be shut off YyTmeans of arudder hydraulic power switch located on the pilot's auxiliaryinstrumentation control panel (shroud).
NOTE: For total flight control boost shut-off, the abovehydraulic power switch and the normal system boost shut-offswitch must be moved to "OFF". The rudder will trail inthis situation and cannot be operated.
2. Output from the 8000 psi pump is displayed on the upper right handside of the pilot's instrument panel.
NOTE: The pressure displayed is in the pump discharge line andwill fall to zero when the hydraulic power switch is at"OFF".
J,

OLU
Ci
ca.
E
0S.-
T 0
c-
U-
tA4
L&L
4-jIA. .
LU CL V,
U11

3. An "oil hot" light has been provided on the pilot's auxiliaryinstrument panel (shroud). This light indicates excessivehydraulic system oil temperature. Actuation of the light is anindication of system malfunction.
4. The DFBL switch, located on the pilot's auxiliary instrumentationcontrol panel, operates the microcomputer. When the computer isoperating, the indicator light will be "ON". When the indicatorlight is not illuminated, the system will be operating in theanalog backup mode.
Contingency procedures are:
1. DFBL Switch "ON", Hydraulic Power Switch "ON"
(a) If left and right yaw responses become significantlydifferent or erratic, turn DFBL switch "OFF".
(b) If rudder becomes "hard over", turn DFBL switch "OFF".
(c) If still "hard over", turn hydraulic power switch "OFF".
2. DFBL Switch "OFF", Hydraulic Power Switch "ON"
(a) If the left and right yaw responses become significantlydifferent for equal inputs, a malfunction in the system isindicated. Terminate test. Turn the rudder hydraulic powerswitch "OFF".
(b) If the rudder should become "hard over", terminate test.Turn rudder hydraulic power switch "OFF".
3. If the "oil hot" light comes on, terminate test. Turn rudderhydraulic power switch "OFF". Alternately cycle the speed brakesand landing gear during return flight to lower bulk fluidtemperature. Stop cycle when fluid temperatures becomes normal.
4. If the 8000 psi system pressure drops below 6000 psi, terminatetest. Turn the rudder hydraulic power switch "OFF".
5. If it should become necessary to shut-down one engine, turn therudder hydraulic power switch "OFF" before engine shut-down.
NOTE: Shut-down of one-engine will cause loss of 8000 psihydraul ic power.
IV. FLIGHT TEST PROCEDURE
1. First Flight
GOAL -Functional check DFBL operation in flight, and toacquire flight time on the system.
113

MAXIMUM ALTITUDE - 20,000 feet
MAXIMUM SPEED - 250 KOAS
PILOT CHECKOUT - With engine operating and normal electricalpower, turn hydraulic power switch "ON".
- Check rudder system by cycling pedals andobserving normal rudder operation.
- Turn DFBL switch to "ON".
- Check rudder system by cycling pedals andobserving normal rudder opeation.
- Turn DFBL switch to "OFF".
TAKEOFF - First Flight T.O. in "ABU" mode (DFBL switch to"OFF").
PILOT MANEUVERS -
NOTE: Pilot to perform these at his discretion at safealtitude. Recorder "ON". Pilot to comment afterlanding. DFBL switch "ON".
- Apply small rudder inputs, note response and dead band.
- Apply pulse inputs, evaluate recentering, left andright.
- Mlake comparison of DFBL "feel" with ABU "feel".
- The pilot is encouraged to perform any additionalmaneuvers that would provide worthwhile data.Maneuvers that could result in dynamic overswingconditions are prohibited.
- Perform large side slip maneuvers left and right up to1/2 directional control if possible.
LANDING - DFBL switch to remain "ON" for landing. Record dataduring landing if conditions permit.
POST FLIGHT -
- De-brief pilot after each flight. Pilot comments tobe correlated with maneuvers and instrumentationcorrelator and markers.
- Copy of flight card with instrumentation correlationand pilot comments made available to Department 871.
114 ,,4 i jUr... _. |l = " - ;: : - -- ", ,;)--..... w='
-J ' -: ---

- Copy of recorded data made available to Department 871.
- Make decisions regarding changes or additionalJ procedure for next flight.
2. Second Flight
GOAL - Compare DFBL with analog AFCAS; acquire operationalflight time on DFBL system.
MAXIMUM ALTITUDE - 20,000 feet
MAXIMUM SPEED -250 knots
PILOT CHECKOUT -Same as flight one.
TAKEOFF - Turn DFBL switch to "ON"
PILOT MANEUVERS -
- Pilot to verify system operation with DFBL switch "ON".
- Place DFBL switch "OFF", verify directional controlwith analog system. (Slight trim changes may bepresent when switching, observe direction andmagnitude of transient.)
NOTE: Pilot to perform these maneuvers with the DFBLswitch alternately "ON" and "OFF" and to compareperformance. Recorders "ON" for maneuvers.
Pilot to commnent on performance.
- Apply small rudder inputs, note response and dead band.
- Apply pulse inputs, evaluate recentering, left andright.
- Make comparison of DFBL "feel" with ABU "feel".
- The pilot is encouraged to perform any additionalmaneuvers that would provide worthwhile data.
LANDING - Same as flight one.
POST FLIGHT - Same as flight one.
3. Third Flight (If Program Permits)
GOAL - Acquire additional flight time on DFBL control andobtain additional data points.
ALTITUDE -Sea Level to 30,000 feet
115

AIRSPEED - Up to 340 KOAS or 0.7 MN, whichever is less
PILOT CHECKOUT - Same as flight one.
TAKEOFF - Same as flight one.
PILOT MANEUVERS - Optional, dynamic overswing maneuvers areprohibited.
LANDING - Same as flight one.
POST FLIGHT - Same as flight one.
4. Flight Conditions for Test
During the flight testing of the LODT it is desirable to operateat as many different flight conditions as possible. The relativepriority of these flight conditions are given in Table C-I.Flights will be planned to obtain as many points per flight aspossible while conforming to air traffic restrictions.
V. FLIGHT INSTRUMENTATION
The following charts contain a list of the instrumentation needed forflight testing of the LODT. There are three priority levels given for theinstrumented data, (1) required to meet flight objective (2) highlydesirable, and (3) nice to have but not necessary. Only two items fall inthe required or mandatory class. They are the LVDT feedback and opticalsensor signal. A special output will be provided from the microcomputer.They are labeled pigtails from connector J-6 of the microcomputer.
116

4
TABLE C-I
DESIRABLE FLIGHT CONDITIONS
150 1 1 2 3
200 2 1 1 3
250 2 2 2 3
300 3 3
Above 300 3 3
10K 15K 20K 30K
,4,
1 I,
117 i

PHOTO RECORDER SYSTEM
READOUTPARAMETER RANGE ACCURACY RESPONSE
1. *Arpe 50 to 500 kts(26 to 250 m/s)
2. *Altitude 0 to 50,000 ft.(15.2 kmn)
3. RPM, L/R Engines 0 to 8,000 RPM
AFCAS PARAMIETERS
4. Temp, Fuselage -50 to +3500F 2 HzComipartment Air (-46 to +1770C)
5. Temp, Pump Suction -50 to +3500F 2 HzFluid (-46 to +1770C)
6. *Temp, Pump Case -50 to +3500F +3% 2 HzDrain Fluid (-46 to +1770C)-
7. Temp, Heat Exchanger -50 to +3500C 2 HzInlet Fluid (-46 to +1770C)
8. Temp, Heat Exchanger -50 to +3500F 2 HzOutlet Fluid (-46 to +1770C)
9. Temp Actuator (-50 to 3500F)
*Desirable Parameter
118

STRIP CHART RECORDER
READOUTPARAMETER RANGE ACCURACY RESPONSE
1. Temp, Outside Air -76 to +140OF(+60 C)
2. Acceleration, -5 to +109
Normal (Vertical)
AFCAS PARAMETERS
3. *Press, Pump 0 to 50 psia 10 HzSuction Line (0 to .3MPa)
4. *Press, Pump 0 to 10,000 psig +3% 10 HzDischarge Line (0 to .6 Mpa)
5. *Press, Pump 0 to 100 psia +3% 10 Hz
Case Drain Line (0 to .6 Mpa)
6. Position, Rudder +120 " 10 Hz
7. **Position, AFCAS +10 volts DC +2% 100 HzTransducer #1
8. **LODT Output +10 volts DC +2% 100 Hz
9. Force, AFCAS +2.5 volts DC 10 HzTransducer #1
10. Force, AFCAS +2.5 volts DC 10 HzTransducer #2
11. *Current, AFCAS +1.0 volts DC +2% 10 HzMotor Coil #1
12. *Current, AFCAS +1.0 volts DC +2% 10 HzMotor Coil #2
13. Current, AFCAS +1.0 volts DC +2% 10 HzMotor Coil #3
14. *Current, AFCAS +1.0 volts DC +2% 10 HzMotor Coil #4
15. **Temp, Oil Hot Pilot AdvisoryLight (+200 F)
*Desirable Parameter
**Mandatory Parameter
119

This page intentionally left blank.
120

I
f LIST OF ABBREVIATIONS/ACRONYMS
AC Alternating Current
ABU Analog Back-Up
ACIA Asynchronous Interface Adapter
A/D Analog to Digital
AFCAS Advanced Flight Control Actuation System
Amp Ampere
AROM Alterable Read Only Memory
Aux Auxiliary
oc Degrees Celsius
cc/min cubic centimeters per minute
c centi (10-2)
cm3 cubic centimeters
CIU Computer Interface Unit
CMD Pilot Command
CPU Central Processing Unit
D/A Digital to Analog
DAC Digital to Analog Converter
db decibel
DC direct current
deg degree
DFBL Digital Fly-By-Light
DFBW Digital Fly-By-Wire
DVM Digital Voltmeter
EDU Electronic Drive Unit
1 21

EPROM Electrically Programmable Read Only Memory
OF degrees Fahrenheit
FRP Flight Reference Plane
FUS STA fuselage station
ft feet
F/O Fiber Optics
F/T force transducer
ft/sec feet per second
gpm gallons per minute
HOFCAS Hydra-Optic Flight Control Actuation System
hp horsepower
Hp pressure altitude (29.91 in. Hg = Sea Level)
Hz Hertz (cycles per second)
in. inch
in2 square inches
in3 cubic inches
INST instrument
I/0 Input/output
k kilo (103)
kg kilogram
km kilometer
KOAS Knots Observed Airspeed (uncorrected)
kW kilowatt
lb pound
L liter
LED light emitting diode
122

t,I L/M liters per minute
LHS Lightweight Hydraulic System
LOOT Linear Optical Displacement Transducer
LVDT Linear Variable Differential Transformer
m meter, also milli (103), also minute
M mega (106)
max maximum
mm Millimeter
M/N model number
min minute (time)
MPa megapascals
MPU Microprocessing Unit
m/s meters per second
my millivolt
N Newton (metric unit of force)
NAAO North American Aircraft Operations
NAC Naval Avionics Center
NADC Naval Air Development Center
No. Number
OAT outside air temperature
P-P peak-to-peak
P differential pressure
Pa pascal (metric unit of pressure)
pk to pk peak to peak
PIA Peripheral Interface Adapter
123
L
r,-

POS rudder position
PROM Programmable Read Only Memory
psi pounds per square inch
psia pounds per square inch absolute pressure
psig pounds per square inch gauge pressure
PM pulse modulation
P/N part number
PWM pulse width modulated
RAM Random Access Memory
R&D Research and Development
RH, R/H right hand
RON Read Only Memory
rpm revolutions per minute
s second (time), also LaPlace transform operator
sec second (time)
SL sea level
TM telemetry
T/O take-off
UHF ultra-high frequency
V volt
VDC volts direct current
W watt
W.L. water line
XDCR transducer
XFMR transformer
124
. •. •"

SUMM4ARY OF METRIC CONVERSIONS
Area i2x 6.452 = cm2
ft2 x .0929 m2
Fluid Flow gal/min x 3785 - cc/mingal/min x 3.785 = L/minin /sec x 16.39 = cc/sec
Force lb x 4.448 = N
Length in x 2.540 = cmft x .3048 = m
Mass lb x .4536 = kg
Pressure, Stress psi x 6895 = Pa (=N/m2)psi x .06895 = bar
Velocity, Speed in/sec x 2.540 = cm/secft/sec x .3048 = n/secknots x .5144 = r/sec
Volume in3 x 16.39 = cm3 (-Cc)gal x 3.785 = L1 x 1000 = cm3
m3x 1000 = L
125