Embed Size (px)
DESCRIPTION
mehanika
Citation preview

Drugi domaci zadatak iz Teorijske mehanike - 14. april 2016.
1. (35 poena) Zbog spljostenosti Zemlje na polovima, potencijalna energija cestice koja se kreceu Zemljinoj ekvatorijalnoj ravni priblizno ima oblik U(r) = k/r + c/(3r3), gde je k < 0, c malakonstanta, a r rastojanje od centra Zemlje. Naci ugaonu brzinu ω koja odgovara kretanju cesticemase m u ekvatorijalnoj ravni po kruznici poluprecnika a. Pokazati da je ovakva kruzna trajektorijastabilna i naci frekvencu ω′ malih radijalnih oscilacija oko nje. Za tu novu, skoro kruznu trajektoriju,pokazati da je priblizno elipsa, cije ose rotiraju ugaonom brzinom Ω ≈ (c/|k|a2)ω.
2. (35 poena) U neinercijalnom referentnom sistemu izabran je koordinatni sistem sa pocetkomu tacki A. U odnosu na inercijalni laboratorijski sistem tacka A se krece sa ubrzanjem ~aA(t), akoordinatne ose rotiraju konstantnom ugaonom brzinom ~ω. Posmatrajmo kretanje sistema od Ncestica u odnosu na definisani neinercijani sistem. Osnovna jednacina dinamike za ν-tu cesticu utom sistemu ima oblik
mν~aν = ~Fν −mν [~aA + ~ω × (~ω × ~rν) + 2~ω × ~vν ] ,
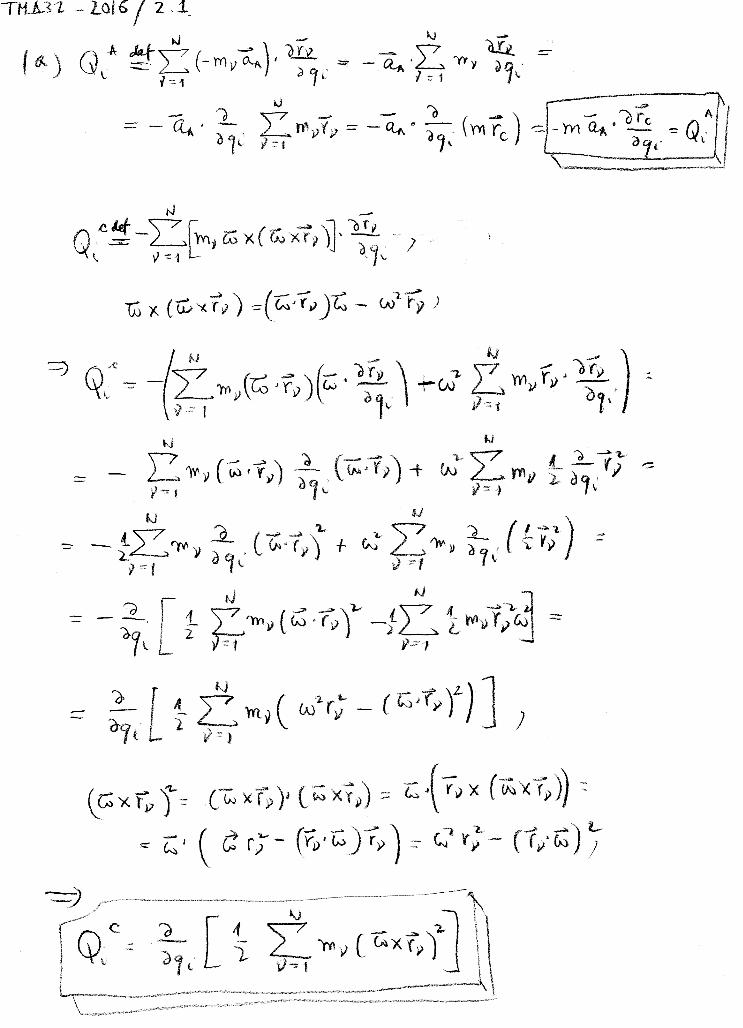
gde je ~Fν ukupna prava sila (koja potice od interakcije sa drugim telima) koja deluje na cesticu, dokpreostali clanovi na desnoj strani jednacine predstavljaju inercijalne sile. Neka su na polozaje cestica~rν nametnute holonomne veze, tako da sistem ima n stepeni slobode, a za nezavisne generalisanekoordinate su izabrane velicine q1, · · · , qn. Radijus vektori cestica u tom slucaju mogu da se izrazekao ~rν = ~rν(q1, · · · , qn, t).(a) Pokazati da je generalisana sila Qin
i , koja odgovara nezavisnoj generalisanoj koordinati qi, apotice od inercijalnih sila, jednaka
Qini = QA
i +Qci +QK
i
gde su
QAi = −m~aA ·
∂~rC∂qi
, Qci =
∂
∂qi
[1
2
∑ν
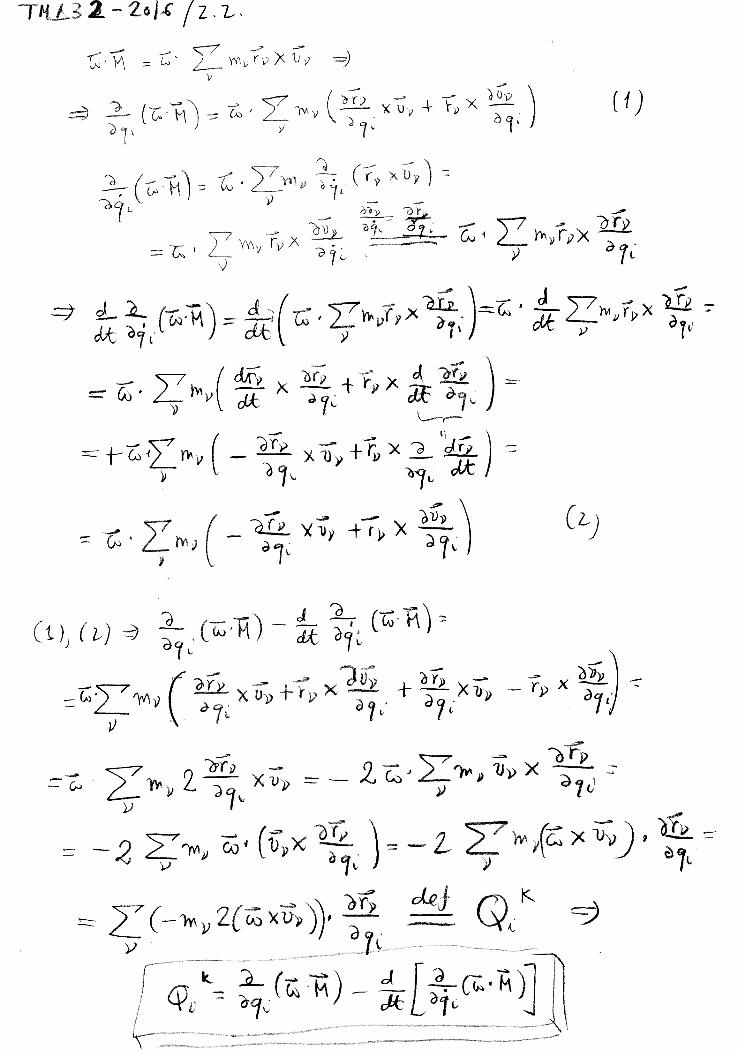
mν(~ω × ~rν)2], QK
i =∂(~ω · ~M)
∂qi− d
dt
[∂(~ω · ~M)
∂qi
]
generalisane sile koje, redom, poticu od sile −mν~aA, centrifugalne sile i Koriolisove sile, m je ukupnamasa svih cestica, ~M predstavlja ukupni moment impulsa cestica u neinercijalnom sistemu, racunatu odnosu na koordinatni pocetak A, a ~rC je radijus vektor centra mase sistema cestica.(b) Ako su sile reakcije veza ~Rν idealne, onda vazi uslov
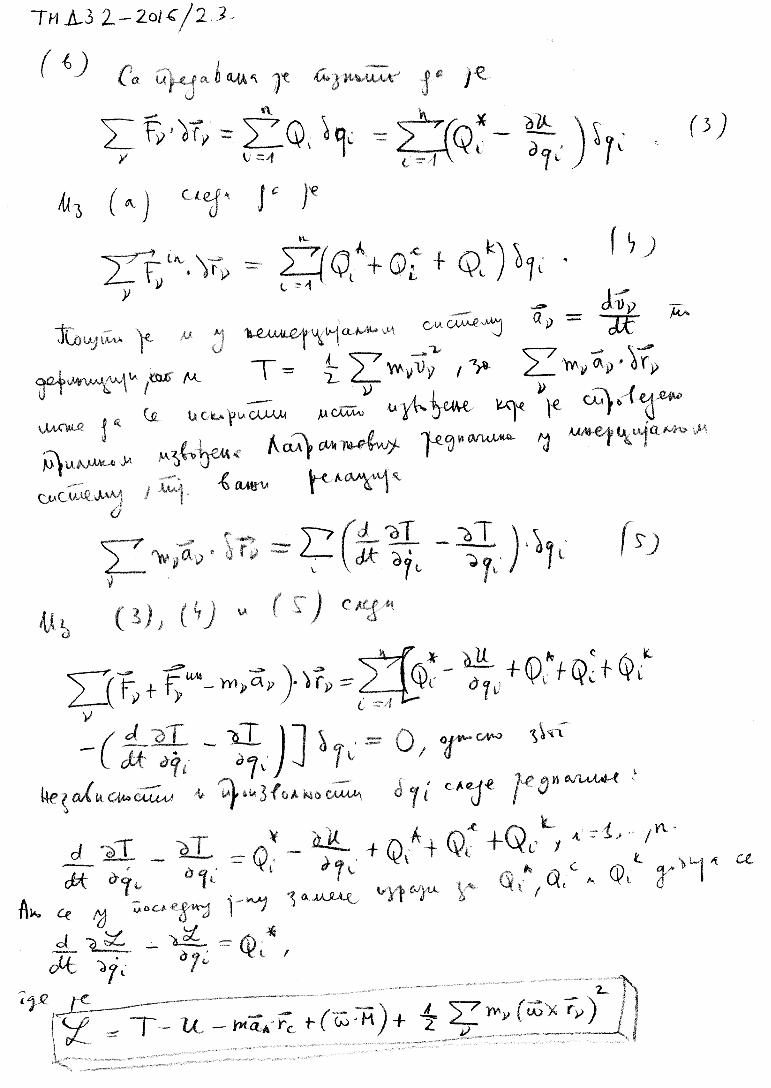
∑ν~Rν · δ~rν = 0, odakle sledi relacija
analogna Dalamber-Lagranzevom principu∑ν
(~Fν + ~F inν −mν~aν) · δ~rν = 0 ,
gde je sada ~Fν ukupna aktivna prava sila koja deluje na cesticu ν, a ~F inν ukupna inercijalna sila
koja deluje na cesticu ν. Polazeci od toga i koristeci izraze za generalisane inercijalne sile iz delapod (a), pokazati da moze da se uvede funkcija L analogna lagranzijanu, takva da vaze jednacine
d
dt
∂L∂qi− ∂L∂qi
= Q∗i , i = 1, · · · , n ,

gde su Q∗i generalisane sile koje poticu od nepotencijalnih aktivnih sila. Cemu je jednaka funkcijaL?
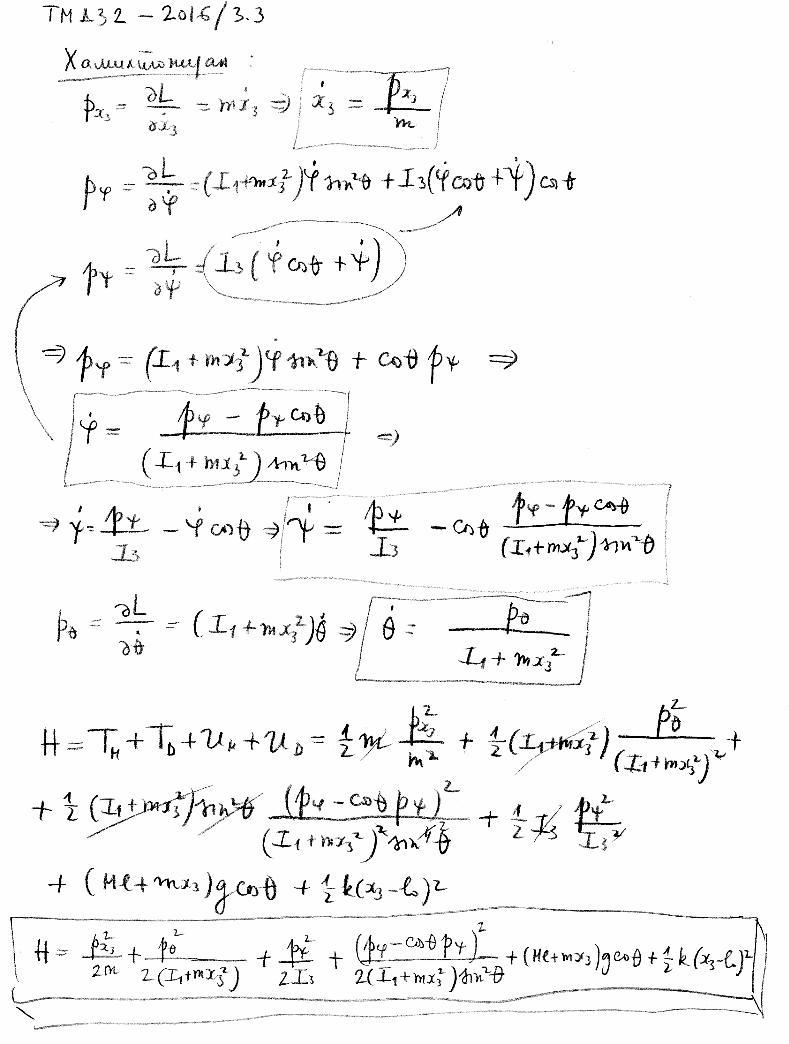
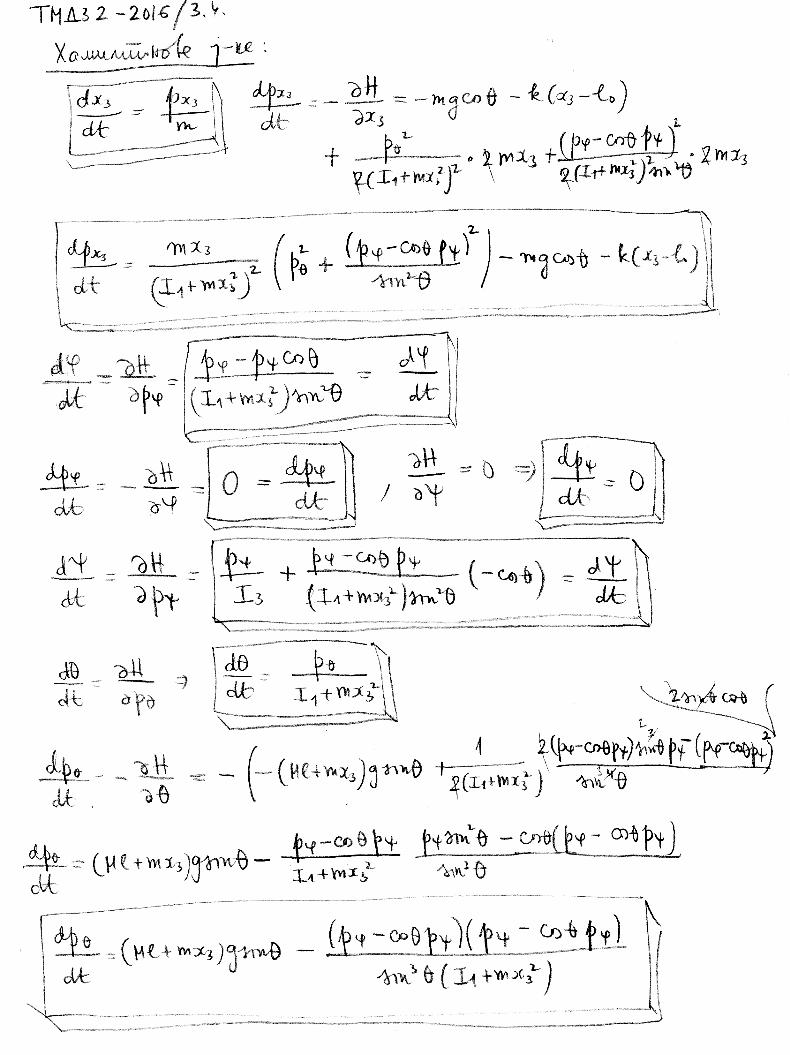
3. (30 poena) Dinamicki simetricno kruto telo (I1 = I2 6= I3) mase M moze da rotira oko nepo-kretne tacke 0, koja lezi na osi simetrije tela na rastojanju l od njegovog centra mase. U telu postojiuska cilindricna supljina, cija osa se poklapa sa osom simetrije tela. U supljini se nalazi materijalnatacka D mase m, koja je oprugom, konstante elasticnosti k i nominalne duzine l0, povezana sa nepo-kretnom tackom 0. Zanemarujuci trenje sastaviti lagranzijan, Lagranzeve jednacine, hamiltonijani Hamiltonove jednacine.
g
Resenje
1. Sa predavanja je poznato da rastojanje r od centra sile zadovoljava diferencijalnu jednacinu
r − M2
m2r3+
1
m
dU
dr= 0 ,
gde je M intenzitet momenta impulsa cestice. Zamenom zadatog izraza za potencijalnu energiju uovu jednacinu dobija se
r − M2
m2r3− k
mr2− c
mr4= 0 . (1)
Vidi se da r = a jeste resenje ove jednacine, ako je
− M2
m2a3− k
ma2− c
ma4= 0 . (2)
U tom slucaju je takode i M = mr2ϕ = ma2ω, pa onda iz poslednje jednacine direktno sledi
ϕ = ω =
√|k|a2 − cma5
.
Ako se u nekom trenutku brzina cestice koja se krece po kruznici r = a ugaonom brzinom ω,malo promeni u radijalnom pravcu, moment impulsa se nece promeniti, ali ce cestica biti pomerenasa kruzne trajektorije. Uvescemo smenu r = a+ ξ, sa kojom jednacina (1) dobija oblik
ξ − M2
m2a3
(1 +
ξ
a
)−3− k
ma2
(1 +
ξ
a
)−2− c
ma4
(1 +
ξ
a
)−4= 0 .

Pod pretpostavkom da je odstupanje od kruzne trajektorije malo, tj. ξ/a 1, linearizacijomprethodne jednacine dobijamo
ξ − M2
m2a3
(1− 3
ξ
a
)− k
ma2
(1− 2
ξ
a
)− c
ma4
(1− 4
ξ
a
)= 0 ,
odnosno
ξ +
(3M2
m2a4+
2k
ma3+
4c
ma5
)ξ =
M2
m2a3+
k
ma2+
c
ma4.
Desna strana ove jednacine, zbog uslova (2), jednaka je nuli, pa nakon sredivanja faktora koji mnoziξ na levoj strani, uzimajuci u obzir da je i dalje M = ma2ω, sledi jednacina
ξ + ω′2ξ = 0 , gde je ω′ =
√|k|a2 + c
ma5,
sto znaci da kruzna trajektorija zaista jeste stabilna - odstupanje r od a se prosto-periodicno safrekvencom ω′ menja sa vremenom, tj.
r(t) = a+ A cos(ω′t+ α) ,
gde je A/a 1, a α konstanta koja zavisi od pocetnih uslova. Orijentacija osa x i y sigurno mozeda se izabere tako da se postigne α = 0, pa je u tom slucaju:
r(t) = a+ A cos(ω′t) = a+ A cos[(ω′/ω)(ωt)] . (3)
S druge strane, iz dobijenih izraza za ω i ω′, kao i uslova da je c mala konstanta, sledi
ω′
ω=
√|k|a2 + c
|k|a2 − c=
√1 + c
|k|a2
1− c|k|a2≈√
1 + 2c
|k|a2≈ 1 +
c
|k|a2.
Imajuci jos u vidu i da je ϕ = M/(mr2) = ω(a2/r2) ≈ ω, odakle sledi ϕ = ωt, jednacina (3) mozeda se prepise na sledeci nacin:
r = a+ A cos(ϕ+ Ωt) , gde je Ω =c
|k|a2ω .
Uocimo sada novi koorinatni sistem Ox′y′, koji u odnosu na sistem Oxy rotira ugaonom brzinomΩ. U tom sistemu polarne koordinate su r′ = r i ϕ′ = ϕ+ Ωt, a prethodna jednacina ima oblik r =a+A cosϕ′. Kako u slucaju malog ekscentriciteta ε 1 jednacina elipse u polarnim koordinatamaima aproksimativni oblik r = p
1+ε cosϕ≈ p(1−ε cosϕ), sto je ekvivalentno aproksimativnoj jednacini
trajektorije u sistemu Ox′y′, zakljucujemo da je perturbovana kruzna trajektorija zaista pribliznoelipsa, koja rotira ugaonom brzinom Ω.