Embed Size (px)
Citation preview

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
128WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Approximation der äußeren virtuellen Arbeit
Die virtuelle Arbeit der äußeren Lasten lässt sich als Funktion der vorgeschriebenen Knotenlasten
𝑁1𝑖 und der vorgeschriebenen Streckenlast 𝑝1 𝜉1 angeben.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
129WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Approximation der virtuellen Arbeit der Trägheitskräfte
Die virtuelle Arbeit der Trägheitskräfte kann durch Substitution von 𝛿𝑢1 𝜉1 und 𝑢1 𝜉1 approximiert
und anschließend in Vektorform angegeben werden.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
130WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Approximation der virtuellen Arbeit der Trägheitskräfte
Zur Ableitung der Gleichung wurden eine konstante Querschnittsfläche 𝐴 und eine konstante
Dichte 𝜌 angenommen. Unter Berücksichtigung linearer Ansatzfunktionen 𝑁𝑖 𝜉1 kann 𝛿 𝜓𝑑𝑦𝑛𝑒
weiter entwickelt werden.
Im Vergleich zur Generierung der Elementsteifigkeitsmatrix müssen zur Integration der
Elementmassenmatrix 𝐦𝑒 quadratische Terme in 𝜉1 integriert werden, wohingegen die
Integranten der Elementsteifigkeitsmatrix konstant sind.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
131WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Approximation der virtuellen Arbeit der Trägheitskräfte
Die Masse des Stabelements ist mit dem Produkt der Dichte, der Querschnittsfläche und der
Stablänge zu berechnen. Die Summe der Komponenten der Massenmatrix ergibt die Masse des
Stabelements.
Die virtuelle Arbeit der Trägheitskräfte in generalisierter Form kann mit Hilfe der Matrix der
Ansatzfunktionen 𝐍 𝜉1 wie folgt angegeben werden.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
132WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Stabelement mit quadratischen Ansatzfunktionen
Nach den vorangehenden Abschnitten können entsprechend die Elementvektoren und -matrizen
des dreiknotigen Stabelements mit quadratischen Verschiebungsansätzen hergeleitet werden.
Die Ansatzfunktionen des quadratischen Stabelements werden aus dem allgemeinen
Lagrange'schen Ansatzpolynom für den Polynomgrad 𝑝 = 2 abgeleitet und in der (1 × 3)-Matrix der
Ansatzfunktionen zusammengefasst.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
133WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Approximation der Koordinaten
Nach dem isoparametrischen Elementkonzept wird die physikalische Koordinate 𝑋1 mit den
Ansatzfunktionen 𝑁𝑖 𝜉1 und Positionen der Elementknoten im physikalischen Raum 𝑋1𝑒𝑖
berechnet.
Damit ist auch die Jacobi Matrix bestimmt. Die Jacobi Matrix und Jacobi Determinante sind mit
denen des linearen Stabelements identisch.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
134WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Approximation der Variablen
Die Verschiebung, die Variation der Verschiebung und die Beschleunigung können mit Hilfe
der Matrix der Ansatzfunktionen 𝑁 𝜉1 und entsprechender Elementvektoren 𝐮𝑒, 𝛿𝐮𝑒 und 𝐮𝑒
bestimmt werden.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
135WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Elementsteifigkeitsmatrix
Zur Generierung der Elementsteifigkeitsmatrix ist die Formulierung des Differentialoperators 𝐁 𝜉1durch Erweiterung um den Freiheitsgrad des zusätzlichen Elementknotens notwendig.
Die Ableitungen der Ansatzfunktionen 𝑁;1𝑖 𝜉1 sind linear in 𝜉1.
3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
136WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
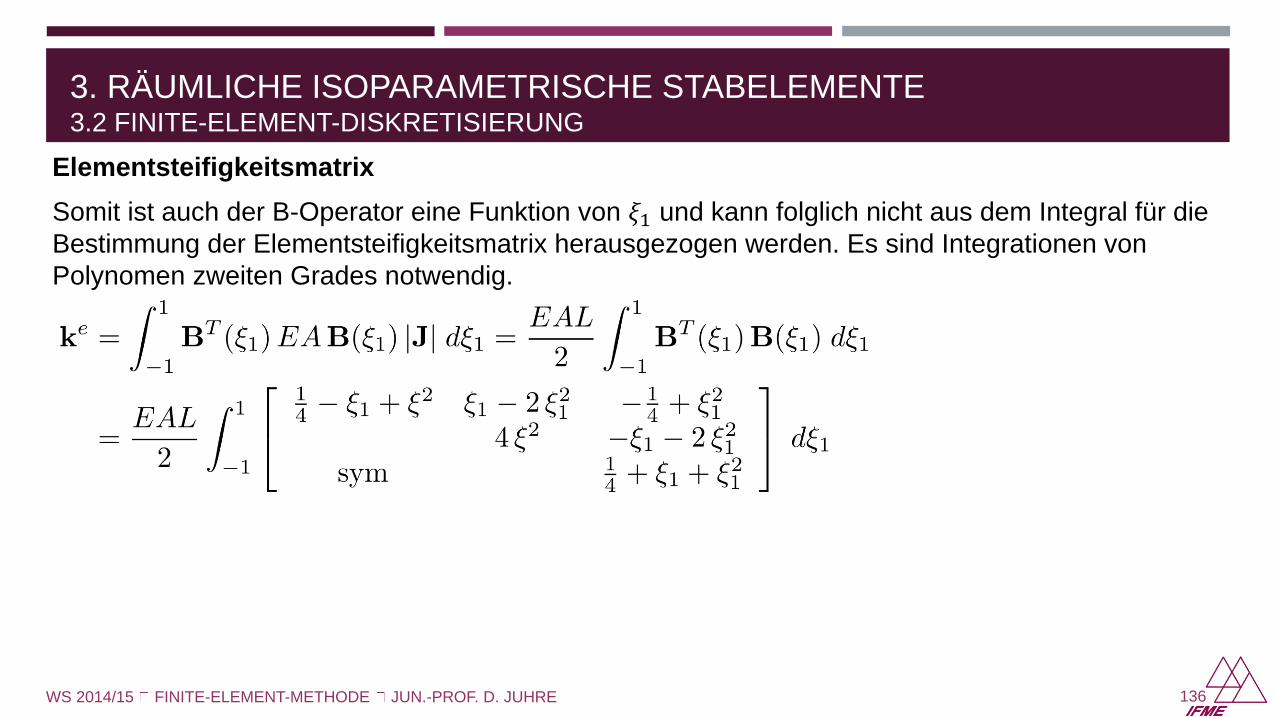
Elementsteifigkeitsmatrix
Somit ist auch der B-Operator eine Funktion von 𝜉1 und kann folglich nicht aus dem Integral für die
Bestimmung der Elementsteifigkeitsmatrix herausgezogen werden. Es sind Integrationen von
Polynomen zweiten Grades notwendig.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
137WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Konsistenter Elementlastvektor
Der konsistente Elementlastvektor 𝐫𝑝𝑒 wird mit Hilfe der Matrix der Ansatzfunktionen 𝐍 𝜉1
generiert.
Im Sonderfall einer konstanten Streckenlast 𝑝1 erhält man den konsistenten Elementlastvektor
in dem der wesentliche Anteil von 2/3 der integrierten verteilten Last 𝑝1𝐿 am Mittelknoten 2des Stabelements aufgebracht wird.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
138WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Elementmassenmatrix
Die Elementmassenmatrix 𝐦𝑒 des quadratischen Stabelements wird entsprechend der virtuellen
Arbeit der Trägheitskräfte für das lineare Stabelement (Folie 131) erzeugt.
Die Integration der Polynome vierten Grads in liefert die Elementmassenmatrix des quadratischen
dreiknotigen Stabelements.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
139WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Elementmassenmatrix
Analog zum linearen Stabelement liefert die Summation der Komponenten der Massenmatrix die
Masse des Stabs.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
140WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Numerische Integration
Die Integration der Komponenten der Elementsteifigkeitsmatrix, der Elementmassenmatrix und
des konsistenten Elementlastvektors wurde in den vorangehenden Folien analytisch durchgeführt.
Um bei der Entwicklung komplexerer finiter Elemente über ein adäquates Werkzeug zur
Integration analytisch nicht oder nur sehr schwer integrierbarer Elementgrößen zu verfügen, wird
am Beispiel des Fachwerkstabs die numerische Integration eingeführt und untersucht.
Durch die numerische Integration ist es möglich, beliebige Funktionen approximativ zu
integrieren.
Dadurch ergibt sich sowohl eine Vereinfachung der Integration als auch die grundsätzliche
Integration analytisch nicht integrierbarer Funktionen.
Nachteilig ist sicherlich der erhöhte numerische Aufwand zur Generierung der Elementmatrizen
und -vektoren. Zudem ist die exakte Berechnung von höherwertigen Funktionen nicht immer
gewährleistet.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
141WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Numerische Integration
Im Rahmen der Finite-Element-Methoden hat sich die sogenannte Gauß-Legendre Quadratur
etabliert.
Die Gauß-Legendre Quadratur einer Funktion 𝑓 𝜉1 über dem Parameterraum 𝜉1 ∈ [−1,1]ist durch die Summe
gegeben. 𝑤𝑖 sind die Wichtungsfaktoren zu den Funktionswerten 𝑓 an den Stützstellen 𝜉1𝑖
und 𝑛 die Anzahl der Integrationspunkte oder sogenannten Gaußpunkte.
Mit der Gauß-Legendre Quadratur können Polynome des Polynomgrads 𝑝 ≤ 2 𝑛 − 1 exakt,
höherwertige Polynome und andere Funktionen approximativ integriert werden.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
142WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Numerische Integration
Eine Zusammenstellung von 𝜉1𝑖 und 𝑤𝑖 für 𝑛 = 1, 2, 3 findet sich in der folgenden Tabelle.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
143WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Numerische Integration
Sollen alle Elementgrößen (𝐤𝑒, 𝐫𝑝𝑒 , 𝐦𝑒) des Stabelements numerisch integriert werden, so sind die
Anforderungen an die Integration zu differenzieren.
Zur exakten Integration der Steifigkeitsmatrix des linearen Stabelements mit der Gauß-Legendre
Quadratur genügt es, eine Ein-Punkt-Integration durchzuführen, da mit 𝑛 = 1 eine lineare
Funktion exakt integriert werden kann.
Bei der Generierung des Vektors der konsistenten Knotenlasten ist die exakte Integration mit der
Ein-Punkt-Gauß-Legendre-Integration nur für eine konstante Streckenlast 𝑝1 möglich.Bei
Applikation höherwertiger Funktionen 𝑝1 𝜉1 wird der konsistente Lastvektor inexakt integriert. Zur
exakten Integration muss die Anzahl der Gaußpunkte an den Polynomgrad der Lastfunktion
angepasst werden. Lastfunktionen, die nicht durch ein Polynom abgebildet werden können,
werden in jedem Fall nur näherungsweise integriert.
Zur exakten Integration der Elementmassenmatrix sind quadratische Funktionen zu integrieren,
was eine Zwei-Punkt-Gauß-Legendre-Integration erfordert. Eine in Äquivalenz zur
Steifigkeitsmatrix durchgeführte Ein-Punkt-Gauß-Legendre-Integration resultiert in einer inexakten
Integration der Massenmatrix.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 FINITE-ELEMENT-DISKRETISIERUNG
144WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Numerische Integration
Ist die numerisch exakte Lösung aller Elementgrößen gefordert, sind mindestens die in der
Tabelle zusammengefassten Gauß-Legendre-Quadraturen zu verwenden.
Häufig wird die Integrationsordnung an die Bedürfnisse der Integration der
Elementsteifigkeitsmatrix angepasst, was zur Folge hat, dass die Massenmatrix inexakt und
der konsistente Lastvektor nur in Sonderfällen exakt integriert werden.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
145WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Grundsätzliches
Nach der Generierung der Elementgrößen aller in einem System befindlichen finiten Elemente
sollen diese zu einem Ensemble geformt werden. Grundlage dieser Assemblierung der Elemente
bildet die vorgenommene Gebietszerlegung und die Forderungen bezüglich der virtuellen
Arbeiten, in Verbindung mit dem Prinzip der virtuellen Verschiebungen.
Die Generierung des Systems oder der Struktur aus finiten Elementen, die die Bauteile der
Struktur darstellen, gliedert sich im wesentlichen in zwei Schritte:
1. An Verbindungsstellen von Elementfreiheitsgraden zweier oder mehrerer Elemente an
einem gemeinsamen Strukturknoten müssen diese kompatibel sein.
2. Benachbarte finite Elemente werden über ihre kompatiblen Elementfreiheitsgrade an
gemeinsamen Strukturknoten zum System beziehungsweise zur Struktur verknüpft,
indem ihre Elementfreiheitsgrade zu einem Systemfreiheitsgrad zusammengefasst
werden.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
146WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Transformation der Elementmatrizen und -vektoren
Die Transformation der Elementgrößen 𝐤𝑒 , 𝐫𝑝𝑒 und 𝐦𝑒 vom elementspezifischen
Koordinatensystem, das durch die Basisvektoren (𝐞1, 𝐞2, 𝐞3) aufgespannt wird, in ein beliebig
orientiertes, durch die Basen (𝐞1′ , 𝐞2
′ , 𝐞3′ ) charakterisiertes, kartesisches Koordinatensystem basiert
auf der Transformation des Elementverschiebungsvektors 𝐮𝑒.
Da das Koordinatensystem (𝐞1, 𝐞2, 𝐞3) so gewählt wurde, dass nur die Verschiebung in Richtung
des Basisvektors 𝐞1 von Null verschieden ist, besteht der Elementverschiebungsvektor 𝐮𝑒
lediglich aus den Komponenten 𝑢1𝑒𝑖 für 𝑖 = 1,… , 𝑝 + 1.
Folglich enthält der Verschiebungsvektor am Elementknoten 𝑖 nur eine Komponente 𝑢1𝑒𝑖. Der
Elementverschiebungsvektor im beliebig gewählten Koordinatensystem (𝐞1′ , 𝐞2
′ , 𝐞3′ ) besteht
hingegen aus drei Komponenten je Elementknoten 𝑖.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
147WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Transformation der Elementmatrizen und -vektoren
Die Transformationsbeziehung ist knotenweise anzuwenden und kann daher für den Polynomgrad
𝑝 = 1 abgeleitet und für beliebige Polynomgrade 𝑝 generalisiert werden.
Die folgende Abbildung illustriert die
Elementfreiheitsgrade in den beiden
Koordinatensystemen (𝐞1, 𝐞2, 𝐞3) und
(𝐞1′ , 𝐞2
′ , 𝐞3′ ) und die Generierung der
Elementverschiebung 𝑢1𝑒2 mit der
Summe der auf die Basis 𝐞1 projizierten
Verschiebungskomponenten des
Vektors 𝐮𝑒2′.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
148WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Transformation der Elementmatrizen und -vektoren
Die Projektion von 𝑢1𝑒2′ ist durch den Richtungscosinus cos 𝛼1, der wiederum aus der Orientierung
des Stabelements im Raum gewonnen werden kann, gegeben. Werden die weiteren Projektionen
analog durchgeführt, erhält man die
gesuchte Verschiebungskomponente
mit den, mit der Ähnlichkeit der
Geometrie von Verschiebung und
Staborientierung im Raum bestimmten,
Richtungscosini cos 𝛼𝑗 für 𝑗 = 1, 2, 3.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
149WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Transformation der Elementmatrizen und -vektoren
Dabei wurde der Elementortsvektor in Analogie zum Elementverschiebungsvektor definiert.
Die Komponente 𝑢1𝑒1 des Elementverschiebungsvektors 𝐮𝑒 kann in Analogie zur Komponente 𝑢1
𝑒1
mit Hilfe der Richtungscosini cos 𝛼𝑗 und der Komponenten 𝑢𝑗𝑒1′ des Elementverschiebungsvektors
𝐮𝑒′
bestimmt werden.
In Matrizenform erhalten wir
3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
150WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Transformation der Elementmatrizen und -vektoren
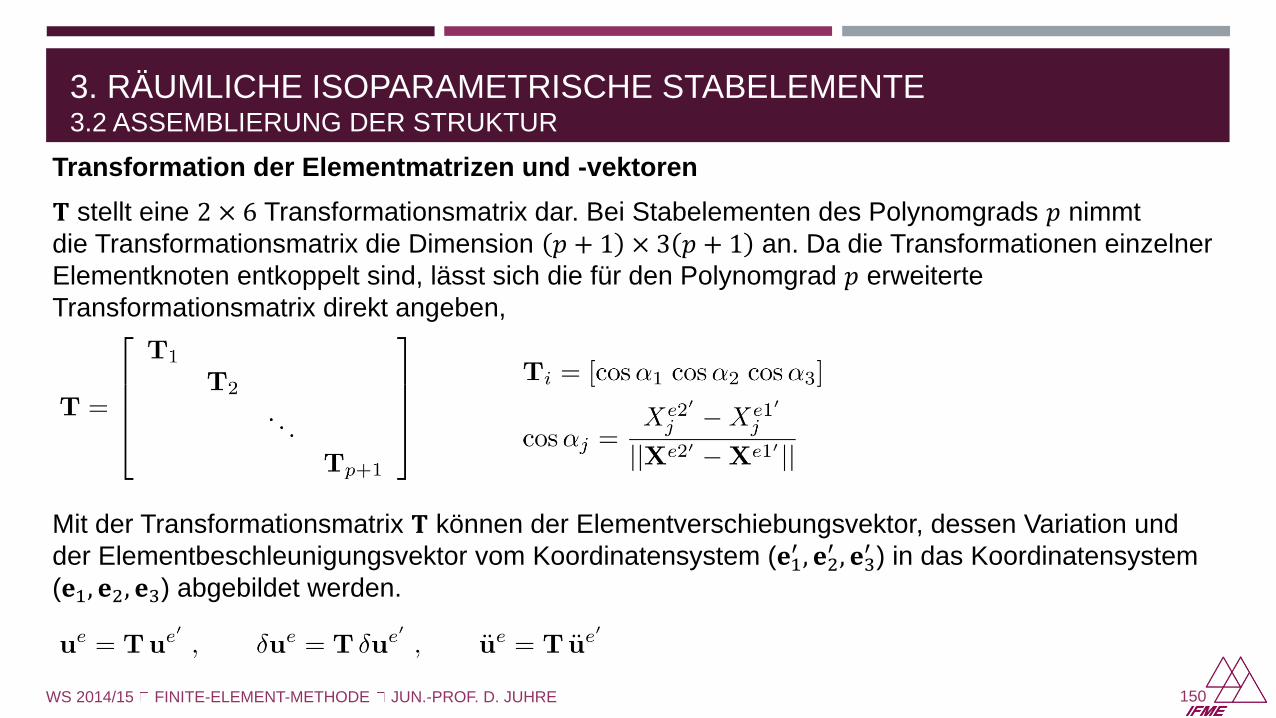
𝐓 stellt eine 2 × 6 Transformationsmatrix dar. Bei Stabelementen des Polynomgrads 𝑝 nimmt
die Transformationsmatrix die Dimension 𝑝 + 1 × 3 𝑝 + 1 an. Da die Transformationen einzelner
Elementknoten entkoppelt sind, lässt sich die für den Polynomgrad 𝑝 erweiterte
Transformationsmatrix direkt angeben,
Mit der Transformationsmatrix 𝐓 können der Elementverschiebungsvektor, dessen Variation und
der Elementbeschleunigungsvektor vom Koordinatensystem (𝐞1′ , 𝐞2
′ , 𝐞3′ ) in das Koordinatensystem
(𝐞1, 𝐞2, 𝐞3) abgebildet werden.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
151WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Transformation der Elementmatrizen und -vektoren
Bei der inversen Transformation gehen die Komponenten 𝑢𝑗𝑒𝑖′ aus der Projektion der Komponente
𝑢1𝑒𝑖 des Elementknotens 𝑖 auf den Basisvektor 𝐞𝑗 hervor.
Damit sind auch die Transformationen der Elementvektoren von lokalen Elementkoordinaten auf
globale Systemkoordinaten gegeben.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
152WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Transformation der Elementmatrizen und -vektoren
Die entsprechende Transformation der Elementsteifigkeitsmatrix 𝐤𝑒 und des Elementlastvektors
𝐫𝑒 können mit der Betrachtung der inneren virtuellen Arbeit beziehungsweise der virtuellen Arbeit
der äußeren Lasten gewonnen werden.
Die Transformationen des Elementverschiebungsvektors und dessen Variation in die innere
virtuelle Arbeit des Stabelements eingebracht
liefert die Transformationsbeziehung der Elementsteifigkeitsmatrix.

3. RÄUMLICHE ISOPARAMETRISCHE STABELEMENTE3.2 ASSEMBLIERUNG DER STRUKTUR
153WS 2014/15 FINITE-ELEMENT-METHODE JUN.-PROF. D. JUHRE
Transformation der Elementmatrizen und -vektoren
Die Transformation der Elementlasten ergibt sich aus der Betrachtung der virtuellen Arbeit der
externen Lasten und der Transformation der Variation des Elementverschiebungsvektors.
Somit erhalten wir
Mit einer analogen Vorgehensweise kann die Transformationsbeziehung der Massenmatrix mit
Hilfe der virtuellen Arbeit der Trägheitskräfte und der Transformation des
Elementbeschleunigungsvektors hergeleitet werden.



![Information für kommunale Behörden Räumliche Energieplanungd344b5ec-a63e-49f... · 2019-08-12 · Räumliche Energieplanung ] Modul 1: Zweck und Bedeutung 4 Die Energieversorgung](https://img.pdfslide.net/doc/110x75/5fb7fce4be480e6ada7faab2/information-fr-kommunale-behrden-rumliche-energieplanung-d344b5ec-a63e-49f.jpg)