-
8/3/2019 4. Equivalent Circuit of IM
1/33
4. Equivalent circuit of IM.
Developing an equivalent circuit model is useful to study and
predict the
performance characteristics of the induction machine with
reasonable
accuracy.
In this section a steady-state per-phase equivalent circuit will
be derived.
For convenience, consider a three-phase wound-rotor induction
machine
as shown in fig 3.1.
Stator Rotor Air-gap
Fig. 4.1. 3 - phase induction machines equivalent circuit
model
-
8/3/2019 4. Equivalent Circuit of IM
2/33
If currents flow in both stator and rotor windings,
resultant rotating magnetic fields will be produced in
the air gap.This resultant air gap field will induce voltages in
both
stator windings (at supply frequency f1) and rotor
windings (at slip frequency f2).
It appears that the equivalent circuit may assume a
formidentical to that of a transformer; therefore it can be
developed from the knowledge of a transformer
equivalent circuit and from knowledge of variation of
rotor frequency with speed in IM.
The only difference is on account of the fact that
the secondary winding (rotor winding) of an
induction motor rotates and mechanical power is
developed.
-
8/3/2019 4. Equivalent Circuit of IM
3/33
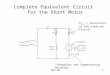
The stator circuit model
As explained earlier, when a voltage V
1
is applied to
the stator terminals, the rotating flux generates
counter emf in the 3-phase of stator windings. The
applied voltage V1 has to overcome counter emf = -
E1, V1` and stator leakage impedance drop,I1(r1 + jx1).
Thus, 11111 jxrIVV
V1
E1
X1R
1
Rc
Xm
Fig. 4.2 - The stator circuit model.
V1 = per-phase terminal voltage
R1 = per-phase stator windingresistance
X1 = per-phase stator leakage
reactance
E1 = per-phase induced voltage inthe stator winding
Xm = per-phase stator magnetizingreactance
Rc = per-phase stator core loss resistance
-
8/3/2019 4. Equivalent Circuit of IM
4/33
The stator current consists of two components, theload
component, I2` (-I2) and the exciting componentIe.
I2` counteracts the rotor mmf, I2N2. The exciting component Ie,
whose function is to create
the resultant air gap flux and to provide the core loss,friction
and windage loss and small stator and rotorI2R losses I0 is usually
30% - 50% of rated current of
IM. Thus, the exciting current can be resolved into
twocomponents.
- magnetising component, Im lagging V1` by 900
and
- core loss component Ic which is in phase withV1`.
In the equivalent circuit, Ic and Im are accounted for bya shunt
branch consisting of:-
- core loss resistance Rc = V1`/Ic
- magnetising reactance Xm = V1`/Im
-
8/3/2019 4. Equivalent Circuit of IM
5/33
Since there is air-gap between stator and rotor of
induction motor, Xm (reactance on account of effect
of magnetizing current) will be much less than
transformer case. Thus, Im will be much greater than
in IM.
F,AT
,wb
Trans
forme
r
Induction motor
Note:- The graph indicates that, Reluctance of IM is much
greater than reluctance of transformers.
Xm = sLs =
2f1Ls
Ls =(Ns)2/RL
Fig. 4.3 Flux mmf relation in transformer and IM.
-
8/3/2019 4. Equivalent Circuit of IM
6/33
Rotor circuit model
Regarding the actual physical facts existing in the rotor
circuit,
the per phase rotor current is:
Where, SE2 slip frequency emf
I2 slip frequency current
If the right hand side is divided by slip ,we get:- (for further
analysis)
22
22
jSXr
SEI
2
2
2
2
jXS
rEI
R2
SX2
SE2
I2
S
R2
Fig. 4.4a Rotor equiv.
circuit at slip s.
Fig. 4.4b
I2
E2 per phase equi. Circuit at stator frequency.
-
8/3/2019 4. Equivalent Circuit of IM
7/33
To determine the complete equivalent circuit of the rotor, the
line
frequency emf E2, the line frequency current I2 and the
speed
dependant resistance r2/s must be referred to the stator
primary
by the effective turn's ratio as in the transformer.
11
2
1
2. VEN
NE
2
2
2
2
1
2
2 jXS
r
N
NjX
S
r
2
1
22 IN
NI
Where, N1` = N1 Kw1
N2` = N2Kw2
-
8/3/2019 4. Equivalent Circuit of IM
8/33
V1
X1R1
Rc Xm
Pag
I1
Io
Ic
Im
a
II 2'
2
2
2'
2XaX
S
Ra
S
R2
2'
2 12
'
2EaEE E
1
1
2
1
2 EN
NE
2jX
Fig.4.5a Rotor equivalent circuit referred to the stator
S
r
2
fig.4.5b Exact equivalent circuit of IM
Where,
2
1
N
Na
-
8/3/2019 4. Equivalent Circuit of IM
9/33
The equivalent circuit of IM is almost similar to the
transformer equivalent circuit. i.e.
- when S = 1, the exact equivalent circuit
becomes the equivalent circuit of a short circuited
transformer.
- In case S = 0, (at synchronous speed), the circuit
becomes the equivalent circuit of an open
circuitedtransformer.
-
8/3/2019 4. Equivalent Circuit of IM
10/33
Analysis of the equivalent circuit of IM
The equivalent circuit shown in Fig.3.4b is not
convenient to use for the determination of the
performance of the induction machine .
As a result, several simplified versions have been
proposed.
Some of the commonly used versions of the equivalent
circuit are discussed here.
-
8/3/2019 4. Equivalent Circuit of IM
11/33
Approximate Equivalent Circuit
If the voltage drop across R1 and X1 is small and the
terminal voltage V1 does not appreciably differ from the
induced voltage E1, the magnetizing branch (i.e. Rc andXm), can
be moved to the machine terminals as shown
in the fig. 3.6 below. (this is done in transformer equivalent
circuit
parameters determination)
V1
X1R1 X2
S
R'
2Rc
Xm
I2
Pag
I1
Io
fig. 4.6 approx. equiv. circuit
-
8/3/2019 4. Equivalent Circuit of IM
12/33
( f )2
-
8/3/2019 4. Equivalent Circuit of IM
13/33
Therefore, if a machine operates from a constant
voltage and constant-frequency source, the sum of
core losses and friction and windage losses remains
essentially constant at all operating speeds. These losses can
thus be lumped together and termed
the constant rotational losses of the inductionmachine.
If the core loss is lumped with the windage andfrication loss,
Rc can be removed from the equivalent
circuit, as shown in the fig. below.
V1
X1R1 X2
S
R'
2Xm
I2
Pag
I1
Io
Fig. 4.7
-
8/3/2019 4. Equivalent Circuit of IM
14/33
IEEE RECOMMENDED EQUIVALENT CIRCUITIEEE RECOMMENDED EQUIVALENT
CIRCUIT
In the induction machine , because of its air gap, the exciting
current Ie
is high of the order of 30 to 50 percent of the full-load
current.
The leakage Reactance X1 is also high .The IEEE recommends that,
in such situation, the magnetizing reactance Xm
can not be moved to the machine terminals (as is done in
transformers.), but
be retained at its appropriate place , as shown in the fig.3.8
below.
The resistance RC is however, omitted, and the core loss is
lumped
with the windage and friction losses.
This equivalent circuit is to be preferred for situation in
whichthe induced voltage E1 differs appreciably from the terminal
voltage V1.
Fig. 4.8 a. Equivalent circuit of IM without core loss.
V1
X1
R1
Xm
Pag
I1
Io
'
2I
'
2X
S
R '2Zf
a
b
-
8/3/2019 4. Equivalent Circuit of IM
15/33
Steady state performance parameters of IM, such as current,
speed, torque, losses, etc. can be computed from the circuit
of
fig. 3.8.
In this fig., Zfis the per phase impedance offered by the
rotatingair-gap field.
Note that Zfincludes mXjXs
r,2
2
m
m
fff
XXjs
r
jXjXsr
jXRZ
22
22
V1
X1
R1
Xm
Pag
I1
Io
'
2I
'
2X
S
R'
2Zf
a
Fig 4.8b
-
8/3/2019 4. Equivalent Circuit of IM
16/33
Impedance Z1 as seen by stator voltage V1 is:-
And
The total power lost in
The power lost in
therefore,
fZjXrZ 111
1
1
1
Z
VI
:,&2
2
isjXjXs
r
m
s
rIRIZ ff
22
2
2
1
fg RIs
rIP2
1
22
2
-
8/3/2019 4. Equivalent Circuit of IM
17/33
Determining the Equivalent circuit model parameters of
IM. The response of an IM to changes in load can be
determined from the equivalent circuit of the motor. The
parameters R1,X1, R2, X2, Xm can be determined
by performing a series of tests on the IM. i.e.
- No-load test
- DC test for stator resistance- Blocked rotor test.
These tests need precision because the resistances
vary with temperature and the rotor resistance also
varies with rotor frequency.
-
8/3/2019 4. Equivalent Circuit of IM
18/33
The No-load test
The induction motor is made
to run at no load at rated
voltage and frequency.
Per phase values of applied
stator voltage Vnl
, input
current Inl and input power
Pnl are recorded ( by two
wattmeter method).
W1A1
A2
A3W2
3-Phase
IM
A
C
B
V
Fig. 4.9 Circuit diagram for
no-load and blocked-rotor
Test
V1
X1
R1
Xm
Pag
I1
Io
'
2I
'
2X
S
R'
2Fig. 4.10 IEEE RECOMMENDEDFig. 4.10 IEEE RECOMMENDED
EQUIVALENT CIRCUITEQUIVALENT CIRCUIT
-
8/3/2019 4. Equivalent Circuit of IM
19/33
Since slip Snl at no-load is very small, r2/s at no-load
is very large as compared to Xm. Thus, the total impedance of
parallel branches
consisting of jXm and (r2/s + jX2) is almost equal tojXm.
Then, the no-load reactance Xnl seen from the stator
terminals is:-
jXnl = jX1 + jXm = X1 stator selfreactance.
VNL
X1
R1
Xm
INL
Fig. 4.11 Equivalent circuit under no-load test.
-
8/3/2019 4. Equivalent Circuit of IM
20/33
From no-load test readings we can get;
nl
nl
nl I
V
Z 2
nl
nl
nl
I
PR
22
nlnlnl
RZX , ,
During no-load condition, as stated earlier, the rotational
losses ( friction, windage and core losses are usually
assumed constant and can be obtained from the relation,
12rIPmP nlnlrot
Rotational losses or fixed losses are:- Stator and
rotorCore losses and friction and windage losses.
mnlXXX
1
If X1 is known, Xm can be
determined.
-
8/3/2019 4. Equivalent Circuit of IM
21/33
Thus,
The no-load test measures the rotational losses and
gives information about its magnetisation current.
i.e., no-load test gives Xnl and Prot Note that, the only load
during no-load test is friction
and windage loss.
The mechanical power(Pm = Pg - Prcul) isconsumed by mechanical
losses.
-
8/3/2019 4. Equivalent Circuit of IM
22/33
P
M
eout TP
Fig. 4.12 Power flow diagram of IM.
StatorI2
Rlo
ss
Stato
rcorelo
ss
Roto
rI2
Rloss
Rotorcore
loss
Frictionandwindageloss
Pg
Rotor input
powerShaft power
Mech. powerdeveloped
Input power
(3IVcos)
-
8/3/2019 4. Equivalent Circuit of IM
23/33
DC test for stator resistanceThe rotor resistance r2 plays an
extremely critical role
in the operation of an IM. i.e.- It determines the shape of the
speed torque curve.
- It determines the speed at which the pull-out torque
occurs.
To determine r2, it is necessary to find r1 of the stator.-
Thus, a DC voltage is applied to the stator windings of an IM.
- The current in the stator is adjusted to the rated value &
the voltage is
measured.
If the supply dc voltage is connected between the two
phases, ( the 3rd phase being open) then, the dc
current flows through the two phase windings and therequired per
phase stator resistance is:-
,2 1dc
dc
I
Vr
dc
dc
I
Vr
21
-
8/3/2019 4. Equivalent Circuit of IM
24/33
DC
w
A
V
+
_
R
S
T
Fig 4.13 Circuit for Dc test to determine stator
resistance
-
8/3/2019 4. Equivalent Circuit of IM
25/33
Blocked rotor test
During this test;
- An Ac voltage is applied to the stator; and the current
is adjusted to the rated value.- The rotor is blocked so that it
can not rotate.
- The current, voltage and power are measured.
Since the rotor is kept stationary, the slip = 1,and the
rotor
resistance r2/s is just equal to r2 which is quite a small
value.
V1
X1
R1
Xm
Pag
I1
Io
'
2I
'
2X
S
R'
2
Fig. 4.14 IEEE RECOMMENDED EQUIVALENT CIRCUITFig. 4.14 IEEE
RECOMMENDED EQUIVALENT CIRCUIT
-
8/3/2019 4. Equivalent Circuit of IM
26/33
Compared with Xm, r2 & X2 are small, so that the whole
input
current flows through them. The equivalent circuit under
this
condition looks a series combination of r1, X1, X2, r2.
cos3 LLin IVP
Ibr
Fig.4.15 equivalent circuit during blocked rptor test
LL
in
IV
P
3cos
arccos
-
8/3/2019 4. Equivalent Circuit of IM
27/33
Impedance of the IM during block rotor test is:-
sincos brbrbrbrbr ZZjXRZ
21 rrRbr
12 rRr br
21 XXXbr
;3 L
L
br I
VZ
Where, Xbris the reactance of stator & rotor
In practice, it is difficult to get separately stator and
rotor reactance, and are usually taken from
experimental data from tables.
22
2
brbrbr
br
br
br
RZX
I
PR
br
br
br I
V
Z
-
8/3/2019 4. Equivalent Circuit of IM
28/33
However, for wound rotor machines x1 is assumed to be equal to
x2.i.e. x1 = x2= Xbr
For squirrel cage induction machines, total leakage reactance
Xbr
(=x1+ x2) can be distributed between stator and rotor as per
thefollowing table:
Empirical distribution of leakage reactance Xbr
0.5
0.6
0.70.5
0.5
0.4
0.30.5
1.Class A (normal Tst , normal Ist and low
slip)
2.Class B (normal Tst, low Ist and low slip)3.Class C (high Tst
, low Ist and low slip)
4.Class D (high Tst , low Ist and high slip)
X2X1
Fraction of XbrClass of motor
For design classes, please refer Stephen J. Chapman, 2nd ed.
-
8/3/2019 4. Equivalent Circuit of IM
29/33
0.5
0.6
0.7
0.5
0.5
0.4
0.3
0.5
1.Class A (normal Tst , normal Istand low slip)
2.Class B (normal Tst, low Ist and
low slip)
3.Class C (high Tst , low Ist and lowslip)
4.Class D (high Tst , low Ist and high
slip)
X2X1
Fraction of XbrClass of motor
-
8/3/2019 4. Equivalent Circuit of IM
30/33
Thus, the block rotor testhelps to determineequivalent circuit
parameters r2, Xbr(X1+X2).
If X1 & X2 are taken from tables, then Xm can bedetermined.
i. e.; Xnl = X1 + Xm
In general, by performing these three tests and
usingexperimental values of X1 and X2 from tables, we can
determine the equivalent circuit parameters of IM.
S i f f i i d i d l
-
8/3/2019 4. Equivalent Circuit of IM
31/33
Separation of friction and windage loss
from the no-load test result The power input to the induction
motor at no-load has to
supply the stator copper loss, core loss and
friction and windage loss.
The dc resistance of the stator winding is measured and its
perphase effective value r1 for AC is calculated from the
relation:-
r1 = (1.1 - 1.3) (dc resistance per phase)
For computing the friction and windage loss, the appliedvoltage
to the unloaded induction motor is varied from 20% toabout 1.25 of
the rated voltage.
The input power, current and voltage are recorded so that agraph
can be plotted.
The speed with reduced voltage, will fall only slightly so
thatthe friction and windage loss remains substantially
constant.
-
8/3/2019 4. Equivalent Circuit of IM
32/33
From the input-power readings, the corresponding stator
ohmic
loss is subtracted to obtain the core loss and friction and
windage loss ( rotational loss); i.e.
Where, Pnl - is the per phase power input,
Inl - is the per phase stator current and
r1 - is the effective per phase stator resistance.
The plot of the rotational loss Prot with variable stator
voltage is
shown in fig below.
PC
Pf&W
Prot
VVrated
)rIP(mP 12nlnlrot
Fig. 4.16
Core loss at
rated voltage
Fric. &
Windage loss
Prot VS V
-
8/3/2019 4. Equivalent Circuit of IM
33/33
The intercept of the extraplotted Prot curve with the
ordinategives the friction and windage loss, because the core loss
iszero for zero applied voltage.
In order to get a motor accurate value of mechanical loss
(friction and windage loss), rotational loss Prot should
beplotted against (Voltage)2.
This plot of Prot with (voltage)2 is almost linear and,
therefore,the extrapolation is easier.
P
rot
V2Vrat.
Friction &windage loss
(Pf&w)
Core loss at
rated voltage (Pc)
Prot Vs V2
Fig. 4.17