-
7/28/2019 5- Development and Validation of a Battery Model
1/15
IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 25, NO. 3,
SEPTEMBER 2010 821
Development and Validation of a Battery ModelUseful for
Discharging and Charging Power
Control and Lifetime EstimationVivek Agarwal, Student Member,
IEEE, Kasemsak Uthaichana, Member, IEEE, Raymond A. DeCarlo,
Fellow, IEEE,
and Lefteri H. Tsoukalas, Member, IEEE
AbstractAccurate information on battery state-of-charge,
ex-pected battery lifetime, and expected battery cycle life is
essen-tial for many practical applications. In this paper, we
develop anonchemically based partially linearized (in battery
power) inputoutput battery model, initially developed for lead-acid
batteries ina hybrid electric vehicle. We show that with properly
tuned param-eter values, the model can be extended to different
battery types,such as lithium-ion, nickel-metal hydride, and
alkaline. The valida-tion results of the model against measured
data in terms of power
and efficiency at different temperatures are then presented.
Themodel is incorporated with the recovery effect for accurate
life-time estimation. The obtained lifetime estimation results
using theproposed model are similar to the ones predicted by the
Rakhma-tov and Virudhula battery model on a given set of typical
loads atroom temperature. A possible incorporation of the cycling
effect,which determines the battery cycle life, in terms of the
maximumavailable energy approximated at charge/discharge nominal
powerlevel is also suggested. The usage of the proposed model is
compu-tationally inexpensive, hence implementable in many
applications,such as low-power system design, real-time energy
management indistributed sensor network, etc.
Index TermsBattery cycle life validation, battery model,
life-time estimation, recovery effect, validation.
I. INTRODUCTION
BATTERIES are widely used as a finite source of energy for
a variety of applications ranging from low-power design of
portable devices to high-power hybrid electric vehicle
(HEV).
Battery performance is affected by various factors, such as
op-
erating temperature, humidity, discharging/charging cycles,
etc.
Battery models are essential for any battery-powered system
design that aims at extending the batterys expected life and
in battery power management. This creates a need for battery
models that capture essential application-dependent
character-
Manuscript received August 15, 2008; revised June 26, 2009;
acceptedJanuary 6, 2010. Date of current version August 20, 2010.
The work ofK. Uthaichana was supported by grant Thailand Research
Fund, Commissionon Higher Education. Paper no. TEC-00320-2008.
V. Agarwal and L. H. Tsoukalas are with the School of Nuclear
Engineer-ing, Purdue University, West Lafayette, IN 47907 USA
(e-mail: [email protected]; [email protected]).
K. Uthaichana is with the Department of Electrical Engineering,
Chiang MaiUniversity, Chiang Mai 50200, Thailand (e-mail:
[email protected]).
R. A. DeCarlo is with the School of Electrical and Computer
Engineer-ing, Purdue University, West Lafayette, IN 47907 USA
(e-mail: [email protected]).
Digital Object Identifier 10.1109/TEC.2010.2043106
istics of real batteries to estimate/predict battery behavior
under
various operation conditions.
The conversion of chemical energy within the battery into
electric energy is a complex electrochemical process. The
bat-
tery behavior, depending upon the application can be
approxi-
mated by an empirical model or by highly accurate and
complex
electrochemical model. Rao et al. [1] classified battery
models
as 1) physical models; 2) empirical models; 3) abstract
models;and 4) mixed models.
Physical models are also known as electrochemical mod-
els [1]. They are highly accurate and involve detailed
considera-
tion of electrochemical processes, thermal dynamic process,
and
the physical construction for both charging/discharging
charac-
teristics [2], [3]. Since, the number of parameters to be
carefully
selected in electrochemical models are large, i.e.,
computation-
ally expensive, the usage of physical models in practical
appli-
cations is limited.
Empirical battery models are easy to configure and are
repre-
sented by a simple mathematical expressions [4], [5] with
less
number of parameters. The parameters are usually obtained as
a
solution of a least squares problem using
chargingdischargingdata, operating conditions, and physical
properties. Empirical
models often fail to provide accurate
representation/estimation
under varying load conditions. On the other hand, abstract
mod-
els are simplified equivalent representation of
electrochemi-
cal process within a battery, and their choice is usually
ap-
plication specific. The equivalent representation, for
example,
can be in terms of electric circuits [6] or stochastic
process
[7].
Mixed models are based on high-level abstraction, avoiding
excessive details of physical laws
(e.g.,electrochemicalprocess)
governing battery characteristics, which leads to the
derivation
of a simplified analytical expression. The number of
parametersto be selected is usually low in mixed models. Rakhmatov
and
Virudhula [8] and Rong and Pedram [9] battery models are
examples of mixed models.
In [10] and[11], a nonlinearempirical lead-acidbattery model
was proposed and validated for supervisory level power flow
control of an HEV. The battery model in [10] has captured
the
characteristics of discharging/charging efficiencies to
estimate
the battery state-of-charge (SOC). Initially, the proposed
model
assumes relatively constant operating temperature, and does
not
consider the capacity fading effect. Further, the model was
lin-
earized in the (control) input to make the model amenable to
a
large body of control literature.
0885-8969/$26.00 2010 IEEE
-
7/28/2019 5- Development and Validation of a Battery Model
2/15
822 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 25, NO. 3,
SEPTEMBER 2010
In this research, we show that with appropriately tuned pa-
rameters, the battery model in [10] can be extended to accu-
rately describe behaviors of additional battery types
[alkaline,
lithium-ion (Li-ion), nickel-metal hydride (Ni-MH)]. This
ex-
tension is validated against the actual discharging and
charging
data. Based on the validation results, we set forth a
functional
relationship that exists between the model coefficients and
tem-
peratures for lead-acid and Ni-MH battery types alone. The
actual data at different temperatures for Li-ion and
alkaline
battery types were not available to us. Although, Uthaichana
et al. [10] did not consider the recovery effect, by
incorporating
the recovery effect, the model can be used for battery
lifetime
estimation under various discharging load conditions.
A possible incorporation of the cycling effect, which deter-
mines the battery cyclelife when it undergoes repeated
discharg-
ing and charging is also suggested. Specifically, the
maximum
available energy in a battery is characterized as a function
of
number of cycles and nominal charge/discharge power level at
a specific depth of discharge (DOD). The quality of the ap-
proximation is validated against the actual data for a
Li-ionbattery. Hence, the versatility of the model to different
bat-
tery types widens its utility for practical applications. For
ex-
ample, in distributed sensor network application, estimation
of
battery longevity, estimates of scheduled maintenance, and
bat-
tery replacement are some of the key issues in such applica-
tion [12][15].
Thepaperis organizedas follows.The discussion on Rakhma-
tov and Virudhula battery model [8] and the development of
nonlinear and partially linearized battery model with
recovery
is presented in Section II. The relationship between both
battery
models is also discussed. The validation of the proposed
model
for different battery types against the actual data measured
atdifferent temperatures for both discharging and charging is
il-
lustrated in Section III. Section IV presents the validation of
the
proposed model with the incorporated recovery model for
Li-ion
battery lifetime estimation under different constant and
varying
power load conditions. The approximation and the validation
of
the maximum rated energy for a Li-ion battery to incorporate
the
effect of cycling on battery cycle life is presented in Section
V.
Finally, conclusions are drawn in Section VI.
II. BATTERY MODELING
Given various forms of battery models, we briefly summarize
the Rakhmatov and Virudhula battery model [8] and develop
apartially linearized inputoutput battery model of Uthaichana
et al. [10]. The generalization of Uthaichana et al. model
[10]
to different battery types and its validation against the
actual
data measured at different temperatures for both charging
and
discharging are some of the main contributions of the paper.
In
addition, a differential equation describing the recovery
effect
is presented. Under the constant maximum energy assumption,
Uthaichana et al. model [10] with the incorporated recovery
model can be applied to solve the battery lifetime
estimation
problem for nonrecharging load profiles and is presented in
Section IV. A possible relaxation on the constant maximum
energy assumption to capture the cycling effect and estimate
the battery cycle life under repeated discharging and
charging
cycles are mentioned at the end of the paper.
A. Rakhmatov and Virudhula Battery Model
Rakhmatov and Virudhula [8] developed an analytical ex-
pression to estimate battery lifetime for various
time-varying
loads by taking into account the changes in the concentration
ofthe electroactive species inside the battery. The model is
based
on a 1-D diffusion process of the concentration of the
species,
where the concentration of the species at time t, and at
distancex from the electrode is denoted by C(x, t). The battery
life-time L is defined as the time at which the concentration at
theelectrode surface C(0, t) drops from the initial concentration
ofthe species C, to a specific threshold Ccutoff. The cutoff
con-centration Ccutoff depending on the battery type and size, is
theconcentration level below which no further power can be
drawn.
Rakhmatov and Virudhula obtained an analytical expression
for
the concentration behavior by defining two partial
differential
equations based on Ficks law as follows:
J(x, t) = D C(x, t)x
(1)
C(x, t)
x= D
2 C(x, t)
2 x(2)
where 1) J(x, t) denotes the flux of the species at time t [0,
L] and at distance x [0, w] from the electrode, in whichw is the
length of the battery and 2) D denotes the diffusioncoefficient.
The boundary conditions at the electrode surface
x = 0 based on the Faradays law, and at the other electrodex = w
based on constant concentration, are expressed in terms
of the concentration gradient as follows:i(t)
nF A= D
C(x, t)
x
x= 0
(3)
0 = DC(x, t)
x
x= w
(4)
where F is Faradays constant, n is the number of electrons
in-volved in the electrochemical reaction at the electrode
surface,
A is the surface area of the electrode, and i(t) is the
dischargingcurrent and represents the load on the battery.
Throughout this
paper, the electrode refers to the one that receives the
elec-
troactive species, and the other electrode refers to the one
that
generates the species.
It can be shown that an analytical solution for (1) and (2),
at
the electrode surface (x = 0) with the boundary conditions
(3)and (4) is as follows:
C(0, t) = C 1nFAw
t0
i(t)d
+ lim0
2
m =1
t0
i(t)e 2 D ( t ) m 2
w 2 d
. (5)
The details on the derivation of (5) are presented in [16].
An
observation can be made from (5) that the concentration of
the species at the electrode surface decreases with time due
to
-
7/28/2019 5- Development and Validation of a Battery Model
3/15
AGARWAL et al.: DEVELOPMENT AND VALIDATION OF A BATTERY MODEL
823
the usage (i(t) > 0). Once the concentration C(0, t) drops
toCcutoff, we obtain the measure of battery lifetime L.
In certain applications, it is important to obtain an
estimate
of the amount of energy consumed, and consequently, the re-
maining battery stored energy; this then allows estimates of
the
battery lifetime given nominal loading profiles. To make the
model more amendable to various applications, (5) has been
expressed in terms of battery capacity as follows:
=
L0
i(t)d + 2
m = 1
L0
i(t)e2 m 2 (L) d. (6)
The first term in (6) is the total charge drawn by the load
and battery losses. The second term of (6) is the unavail-
able charge left in the battery due the nonuniform distribu-
tion of the electroactive species during discharging. Here,
the
two battery parameters and are introduced. The parameter =
nFAwC(1
Ccutoff/C
) denotes the battery capacity,
i.e., the estimated amount of charge used during the battery
life-time and =
D/w denotes the discharge time constant. The
values of both parameters depend on the battery type. Note
that
the nonuniform distribution of the electroactive species in
the
second term of (6) results in lower concentration at the
electrode
surface C(0, t) than at the other electrode C(w, t). If a rest
pe-riod is introduced, the nonuniformity decreases over time
and
more charge are available at the electrode surface, which is a
part
of the recovery effect. The equation capturing this
phenomenon
is described in [17].
In general, the load i(t) is unknown and nonconstant. Evenif
known, the nonlinear and random behavior would make the
usage of (6) numerically difficult. Nevertheless, if i(t) has
anaverage value over small intervals of time, the
time-varyingdischarge rate can be approximated by piecewise
constant loads,
i.e., i(t) is approximated in the time interval [0, T] by N
equalsize staircase basis functions as follows:
i(t) N1k = 0
Ik
U(t tk ) U(t tk +1 )
(7)
where U(t) is the unit step function.Given a set ofM constant
experimental current loads Ii , i =
1, 2, . . . , M and corresponding set ofMlifetimes Li , the
battery
parameters and are selected as a least squares
solutionminimizing
Mi= 1 |Ii Ii |2 , where Ii = Ii (, ) is an estimate
of the experimental current load based on the most recent
values
of and within the iteration process.Given the estimated battery
parameters and N-step staircase
approximation of the load [see (7)], the battery lifetime
compu-
tation involves two steps. The first step is to find the
subinterval
(Tk = tk +1 tk , k = 1, 2, . . . , N 1), such that the
concen-tration at the electrode surface C(0, tk +1 ) is below
Ccutoff attk + 1 , i.e., find the subinterval Tk , such that L [tk
, tk + 1 ].The second step is to determine the smallest t within
the subin-terval Tk , such that C(0, tk +1 ) Ccutoff. The smallest
t canbe found using the modified secant method, as in [18].
B. Development of Nonlinear and Partially Linearized
Battery Model
As mentioned earlier, the motivation to solve the power man-
agement problem of an HEV led to the development of par-
tially linearized (control-oriented) battery model developed
as
follows:
Here, normalized battery energy, denoted by Wba t (t), is
de-fined as the ratio of the instantaneous stored charge to the
max-
imum stored charge, i.e., Wba t (t) = Wba t (t)/Wm ax
ba t , where
Wba t (t) is the instantaneous stored battery energy and Wm axba
t isthe maximum rated storage energy of the battery. As
developed
in [19], Wba t (t) approximates the battery SOC under the
rea-sonable assumption of a relatively constant open-circuit
battery
voltage during operation.
To achievea dynamic model formeasuring theSOC of thebat-
tery, we differentiate the normalized stored energy Wba t (t)
=Wba t (t)/W
ma xba t with respect to time to obtain a relationship to
the discharging and charging power of the battery
Wba t = Wba t (t)
Wma xba t= 1
Wma xba tba t (Wba t , Pba t , v)Pba t (t)
(8)
where 1) v is the battery mode of operation, where v = 0
meansthe battery is discharging and v = 1 means the battery is
charg-ing; 2) ba t (Wba t , Pba t , v) is a generic efficiency for
discharg-ing and charging; and 3) Pba t (t) is the discharging
(+)/charging() battery power flow (input) as expressed in (9). The
nega-tive sign in (8) indicates decreasing Wba t (t) during
discharging,while (8) becomes positive during charging, thereby
indicating
increasing Wba t (t)
Pba t (t) => 0, discharging
< 0, charging. (9)
In general, during discharging, when 0 Pba t (t) < , where is
a small threshold and usually negligible compared to the dis-
charging loads, a battery undergoes charge recovery, whichis
de-
scribed in Section II-D. During discharge, the generic
efficiency
ba t (Wba t , Pba t , v) = 1/0ba t (Wba t , Pba t , v) > 1,
where
0ba t
is the actual discharging efficiency. A desired power output
causes the battery to discharge more rapidly than what is
re-
quired to account for losses. On the other hand, during
charging
ba t (Wba t , Pba t , v) = 1ba t (Wba t , Pba t , v) < 1,
where
1ba t is
the actual charging efficiency, indicates that more power is
needed to overcome charging losses.Given this relationship, the
approximations of the generic ef-
ficiency ba t (Wba t , Pba t , v), v {0, 1} as a function ofWba
t(state) and Pba t (input) for both cases is done by interpolatinga
nonlinear function against the downscaled battery efficiency
map (see Appendix B) for v {0, 1}. Intuitively observing
thatgeneric efficiency curves of a battery appear to have a
logarith-
mic characteristic, the following approximation was
empirically
determined:
ba t (Wba t , Pba t , v)=ln(Wba t + d1 ,v ) + d2,v Pba t (t) +
d3 ,v .(10)
Given appropriate coefficients, the objective of this paper is
to
show the quality of this approximation for four distinct
battery
-
7/28/2019 5- Development and Validation of a Battery Model
4/15
824 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 25, NO. 3,
SEPTEMBER 2010
types. The coefficients dk ,v , k = 1, 2, 3 are chosen to fit
thegeneric battery efficiency map. The coefficients during
battery
discharging and charging are computed as a solution to a
nonlin-
ear least-squares regression similar to that described earlier
for
obtaining parameters of the Rakhmatov and Virudhula model.
Specifically, in each mode, the coefficients dk ,v for k = 1, 2,
3are the numerical solution to the following minimization:
mindk R
ba t (Wba t , Pba t , v)
[ln(Wba t + d1,v ) + d2 ,v Pba t (t) + d3,v ]2 . (11)This
nonlinear minimization problem is solved via a subroutine
nlinfitin MATLABs statistical toolbox in this study.
As per the aforementioned development, the differential
equa-
tion for Wba t (t) [see (8)] is nonlinear in the control
input(Pba t (t)). To makethe model amenableto a large bodyof
controlliterature, (8) is partially linearized about the
mode-dependent
nominal battery operating power Pvba t,no m . The resulting
lin-earized differential equation is as follows:
Wba t (t) =d2 ,v
Wm axba t
Pvba t,no m
2
ln(Wba t (t) + d1,v ) + 2d2,v Pvba t,no m + d3 ,v
Pba t (t)
Wm axba t.
(12)
The details on the methodology to obtain the partially lin-
earized model [see (12)] are presented in Appendix A.
C. Relationship Between Rakhmatov and Virudhula and Par-
tially Linearized Battery ModelIn many practical applications,
the actual knowledge about
the battery SOC is essential. In Rakhmatov and Virudhula [8]
battery model the concentration of the electroactive species
at
the electrode surface is given by (5). Since the specific
gravity
of the electroactive species is greater than that of water,
the
higher the concentration of the electrospecies is the higher
the
specific gravity. When a battery is fully charged (SOC = 1),then
the concentration in the electrolyte is at its maximum C
and so is the specific gravity. On the other hand, if the
concen-
tration of the species is at Ccutoff (SOC = C = 0), then
thespecific gravity is at minimum operating value. In fact,
there
is a linear relationship between the battery SOC and the
spe-cific gravity as shown in [20] under an assumption of
uniform
concentration of the electroactive species at equilibrium.
Based
on aforementioned discussion, there exists a relationship
be-
tween the battery SOC and concentration in the Rakhmatov and
Virudhula battery model at equilibrium. Uthaichana et al.
bat-
tery model [10] approximates the battery SOC as normalized
battery energy (Wba t ) under the assumption of relatively
con-stant open-circuit voltage. This relationship between the
con-
centration in the Rakhmatov and Virudhula battery model [8]
and Wba t in Uthaichana et al. battery model [10] is expressedas
follows:
C(t) = Wba t (t)(C Ccutoff) + Ccutoff (13)
where C(t) is the concentration of the species. Note that
atequilibrium, the concentration of the species is uniform,
i.e.,
C(0, t) = C(w, t) = C(t).
D. Battery Recovery Model
The recovery effect is the increase in Wba t (the battery
SOC)
due to the adjustment of the concentration gradient toward
zerounder no load condition 0 Pba t (t) < , where is a
smallthreshold and usually negligible compared to the
discharging
power loads. The recovery of the Wba t , depending upon
thebattery type, reaches its steady-state value after a few time
con-
stants. However, under the same condition, the derivative of
Wba t (t) given by the partially linearized model (12)
approxi-mately reduces to d2,v /W
ma xba t (P
vba t,no m )
2 for v = 0. This is notequivalent to the charge recovery
effect. Therefore, to achieve a
better representation of the battery behavior, we incorporate
the
recovery effect by augmenting an additional equation [see
(14)]
to the partially linearized battery model
Wrba t (t) = Wrba t (t) + (1 + )Wba t (ti ), 0Pba t (t) <
(14)
where 1) = 1/, is the recovery time constant; 2) Wrba t (t)
denotes the battery SOC during recovery; 3) the superscript
rdenotes recovery; and 4) denotes the percentage of recovery,whose
value depends upon battery type and is usually obtained
from experimental data [21]. In (14), Wba t (ti ) denotes the
bat-tery SOC at time ti , where ti is the time instance when
recoverystarts, hence the initial condition of W
rba t (t) is Wba t (ti ). The
value of is computed using the logarithmic approach (see
Appendix C).
III. PARTIALLY LINEARIZED BATTERY MODEL VALIDATIONFOR CHARGING
AND DISCHARGING
In this section, we validate the partially linearized
battery
model developed in Section II-B for different battery types
with-
out incorporating the recovery model. Since, the selected
mag-
nitude of the input power (Pba t ) during validation is greater
thanthe threshold , the recovery effect is negligible. The
procedureto validate the partially linearized model for each
battery type
can be briefly summarized as follows: first, we obtain the
battery
efficiency data. Second, we estimate the efficiency
coefficients
dk, v for charging and discharging, as described in Section
II-B.Finally, we evaluate the quality of the partially linearized
model
without recovery effect against the actual data by computing
thetwo-norm normalized error. Specifically, we compute the
error
between Wba t given by (12) at a given Pvba t,no m and the
actualdata for charging and discharging under various loads,
SOC,
and temperatures.
The validation results during charging and discharging at
0 C, 25 C, and 50 C are shown for 17.2 Ah, 12 V lead-acidbattery
type. The validation results during discharging alone are
shown for 6.5 Ah, 7.2 V Ni-MH battery type at 5 C, 20 C,30 C,
and 40 C, as the internal resistance data during chargingwas not
available to us. Based on the validation, we set forth
a functional relationship between the model coefficients, dk ,v
,
k = 1, 2, 3 andtemperature(T) duringcharging anddischarging
-
7/28/2019 5- Development and Validation of a Battery Model
5/15
AGARWAL et al.: DEVELOPMENT AND VALIDATION OF A BATTERY MODEL
825
TABLE IMODEL COEFFICIENTS AND THE APPROXIMATION ERROR FOR 17.2
Ah, 12 V
LEAD-ACID BATTERY FOR THE NONLINEAR EFFICIENCY APPROXIMATION
FORBOTH DISCHARGING AND CHARGING AT DIFFERENT TEMPERATURE
for both lead-acid and Ni-MH battery types. On the other
hand,
the validation results during both charging and discharging
for
1.41 Wh Li-ion and during discharging alone for 2850 mAh
alkaline batteries1 at room temperature are shown.
A. Efficiency Data for Validation
To obtain the efficiency data for lead-acid, Ni-MH, Li-ion,
and alkaline batteries, we follow the procedure describedin
[22].
In [22], the battery is represented by a simple resistive
Thevenin
equivalent circuit. The internal resistance of the battery is
a
function of load rate, SOC, and temperature. The internal
re-
sistance value is obtained as an average value under various
loads for each SOC at different temperature values for
lead-acid
and Ni-MH batteries and for each SOC at room temperature
for Li-ion and alkaline batteries. The battery efficiency is
then
obtained as the ratio of the terminal voltage to the
open-circuit
voltage for discharging and vice versa for charging, where
the
voltage difference is due to the losses through the internal
re-
sistance. The data on the internal resistance for each SOC
atdifferent temperature values for 17.2 Ah, 12 V lead-acid, and
6.5 Ah, 7.2 V Ni-MH batteries is obtained from [23] and
[24],
respectively. While, the internal resistance data for each SOC
at
room temperature for 1.41 Wh Li-ion, and 2850 mAh alkaline
batteries is obtained from [25].
B. Validation Results for Lead-Acid at Different Temperature
Initially, we present the discharging and charging
validation
results of the partially linearized battery model without
consid-
ering the recovery model for 17.2 Ah, 12 V lead-acid battery
type at 0 C, 25 C, and 50 C.In the case of a 17.2 Ah, 12 V
lead-acid battery, we assume a
nominal load power of 27.5 W during discharging and 22 Wduring
charging for all the temperature values. The coefficients
dk, v , k = 1, 2, 3 used to validate the linearized
approximationduring discharging and charging at different
temperatures are
presented in Table I along with the two-norm normalized
error.
The approximation of the linearized generic battery
efficiency
is accurate around the nominal input power of 27.5 W during
discharging and around the nominal input power of 22 Wduring
charging. Fig. 1, whose y-axis is Pba t ba t , illustrates
1Alkaline batteries in the market are mostly nonrechargeable as
the existing
rechargeable alkaline batteries are not commonly used.
the accuracy of the efficiencies from the linearized
approxima-
tion against the actual data for both discharging and
charging,
respectively. The approximation error increases for large
excur-
sion from the nominal input power level, as observed in Fig. 1,
as
expected. The partially linearized battery model, initially
devel-
oped for an HEV application, showed a similar accuracy
pattern
over the range of battery power in the case of a 30 of 12 Ah
12 V lead-acid battery [10], [11], [26].
From Table I, upon interpolation of the data, we see that
the variation in the model coefficients is essentially linear
with
temperature and is given by a functional relationship in Table
II
for both discharging and charging.
C. Validation Results for Ni-MH at Different Temperature
The validation results of the partially linearized battery
model
for 6.5 Ah, 7.2 V Ni-MH battery type at 5 C, 20 C, 30 C, and40 C
for discharging alone arepresented. A nominal load powerof 15 W is
assumed during discharging for all the temperature
values. The approximation of the linearized battery model
isaccurate around the nominal input power level of 15 W during
discharging. Fig. 2 shows a similar accuracy pattern over
the
range of battery power. The coefficients used to validate
the
linear approximation during discharging for 6.5 Ah, 7.2 V
Ni-
MH battery at 5 C,20 C,30 C,and40 C are listed in Table IIIalong
with the two-norm approximation error. From Table III,
we observe that the variation in the model coefficients
during
discharging is essentially linear with temperature and is
given
by a functional relationship in Table IV.
D. Validation Results for Li-ion and Alkaline Batteries
at Room Temperature
Initially, we present the discharging and charging
validation
results of the partially linearized battery model for 1.41 Wh
Li-
ion battery at room temperature alone, as the internal
resistance
data at different temperature values was not available to
us.
Later, we present the validation result during discharging
for
2850 mAh alkaline battery at room temperature.
In the case of a 1.41 Wh Li-ion battery, the same valida-
tion procedure is applied. The two-norm normalized error for
discharging is 3.15% and for charging is 1.38%. The approx-
imation of the linearized battery model is accurate around
the
nominal input power level of 253 mW during discharging and
250 mW during charging, as shown in Fig. 3. The approxima-tion
error increases during both discharging and charging as the
load power level deviates from respective nominal power
level,
but not significantly over the range, as shown in Fig. 3.
In the case of 2850 mAh alkaline battery, the same
validation
procedure is applied during discharging alone, since
alkaline
batteries are mostly nonrechargeable. The existing
rechargeable
alkaline batteries are not commonly used. Fig. 4 shows the
ac-
curacies of the linearized battery model for 2850 mAh
alkaline
battery, which is linearized about the nominal input power
of
125 mW. Thetwo-norm normalized error is 4.01%. From Fig. 4,
a similar accuracy pattern over the range of battery power
is
observed.
-
7/28/2019 5- Development and Validation of a Battery Model
6/15
826 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 25, NO. 3,
SEPTEMBER 2010
Fig. 1. Linearized approximation of 17.2 Ah 12 V lead-acid
battery. (Left column) During discharging around the nominal power
of 27.5 W at (a) 0 C,(b) 25 C, and (c) 50 C. (Right column) During
charging around the nominal power of22 W at (d) 0 C, (e) 25 C, and
(f) 50 C.
Thecoefficients used to validate the linear approximation
dur-
ing discharging and charging for 1.41 Wh Li-ion and 2850 mAh
alkaline batteries during discharging alone are listed in Table
V.
The linearized approximation of the battery captures the
fact
that the battery efficiency decreases as SOC decreases and
bat-
tery input power increases. This is consistent with the
behavior
of the battery efficiency maps. In the validation of all the
battery
types during discharging and charging, at different
temperatures
(including the room temperature), we observed that the
partially
linearized model is accurate about its nominal input power
level
-
7/28/2019 5- Development and Validation of a Battery Model
7/15
AGARWAL et al.: DEVELOPMENT AND VALIDATION OF A BATTERY MODEL
827
Fig. 2. Linearized approximation of 6.5 Ah, 7.2 V Ni-MH battery
during discharging around the nominal power of 15 W at (a) 5C, (b)
20 C, (c) 30 C, and(d) 40 C.
TABLE IIFUNCTIONAL RELATIONSHIP OF THE MODEL COEFFICIENTS
WITH
TEMPERATURE DURING DISCHARGING AND CHARGING FOR 17.2 Ah, 12
VLEAD-ACID BATTERY
TABLE IIIMODEL COEFFICIENTS AND THE APPROXIMATION ERROR FOR 6.5
Ah, 7.2 V
Ni-MH BATTERY FOR THE NONLINEAR EFFICIENCY APPROXIMATION
DURINGDISCHARGING AT DIFFERENT TEMPERATURES
TABLE IVFUNCTIONAL RELATIONSHIP OF THE MODEL COEFFICIENTS
WITH
TEMPERATURE DURING DISCHARGING FOR 6.5 Ah, 7.2 V Ni-MH
Battery
and the approximation error increases slightly as the load
powerdeviates from the respective nominal input power level. The
ac-
curacy of the partially linearized can be improved by
selecting
different power level based on the operating load power.2
IV. LI-ION BATTERY LIFETIME ESTIMATION USING PARTIALLY
LINEARIZED MODEL WITH RECOVERY
In this section, we present the description of typical power
load usage during battery operation and numerical estimation
2A maximum of 5.24% error was observed during the validation,
which isquite reasonable. However, one can create a set of range of
load powers andselect an associatednominal power for eachrange to
lower the deviation between
the load and nominal power, and hence to reduce the
approximation error.
-
7/28/2019 5- Development and Validation of a Battery Model
8/15
828 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 25, NO. 3,
SEPTEMBER 2010
Fig. 3. Linearized approximation of 1.41 Wh Li-ion battery
during (a) battery discharging around the nominal power of 253 mW
and (b) battery charging aroundthe nominal power of250 mW.
Fig. 4. Linearized approximation during discharging for 2850 mAh
alkalinebattery around the nominal power of 125 mW.
of 1.41 Wh Li-ion battery lifetime using the partially
linearized
model during discharging (v = 0) [see (12)] with the
incorpo-rated recovery model [see (14)]. The actual lifetime
measure-
ments on a real 1.41 Wh Li-ion battery for various typical
load
usages are not available. The DUALFOIL simulator [3], which
numericallysolves set of partial differential equations
governing
the chemical reaction in the rechargeable Li-ion batteries,
can
be used to obtain lifetime estimates of 1.41 Wh Li-ion
batteryfor a given set of typical power loads. However, we do not
use
DUALFOIL simulator because it is a cumbersome processes
to appropriately choose over 50 parameters in order to
obtain
accurate simulation results. Therefore, to estimate the
lifetime
of 1.41 Wh Li-ion battery, we downscale the power loads used
during the actual lifetime measurement of same type 2.2 Wh
Li-ion battery in [16] and [27]. Under the downscaling
assump-
tion, (see Appendix B for details), the lifetime of 2.2 Wh
Li-ion
battery subject to typical power loads summarized in Tables
VI
and VII and the lifetime of 1.41 Wh Li-ion battery subject
to
downscaled typical power loads also summarized in Tables VI
and VII must be the same. We compare the aforementioned ac-
TABLE VMODEL COEFFICIENT FOR THE NONLINEAR EFFICIENCY
APPROXIMATION FORBOTH DISCHARGING AND CHARGING FOR 1.41 Wh AND FOR
DISCHARGING
ALONE FOR 2850 mAh ALKALINE BATTERIES AT ROOM TEMPERATURE
TABLE VIDESCRIPTION OF ACTUAL [16] AND DOWNSCALED POWER
LOADS
OFS
UBSET
PT
tual battery lifetime with the estimate obtained using the
battery
model in Section IIB and D [see (12) and (14)] and with the
estimate obtained using the Rakhmatov and Virudhula battery
model (6).
-
7/28/2019 5- Development and Validation of a Battery Model
9/15
AGARWAL et al.: DEVELOPMENT AND VALIDATION OF A BATTERY MODEL
829
TABLE VIIDESCRIPTION OF ACTUAL [16] AND DOWNSCALED VARYING POWER
LOADS OF SUBSET Pc
In general, the battery open-circuit voltage Vo c is a
functionof battery SOC and operating temperature. In this paper,
all
the computation assumes room temperature. Initially, Wba t (t
=0) = 1 corresponds to fully charged battery with theinitial
open-circuit voltage Vo c = V
o c , while Wba t (t = L) = 0 corresponds
to Vo c dropping to the cutoff voltage (Vcutoff). The value
ofV
o c
and Vcutoff depends upon the battery type. So under a
typicalload, battery Vo c drops to Vcutoff over time. Hence, the
batterylifetime L can also be defined as the time taken by battery
Vo cto drop to Vcutoff below which no further power (current) canbe
drawn from the battery. This definition is consistent with the
battery lifetime definition in Section II-A, i.e., the time
duration
duringwhich the concentration of the electroactivespecies
drops
from its initial concentration C to a specific threshold
Ccutoff.
A. Description of Typical Power Load Usage
The typical power loads (both constant and varying) used in
this paper are the average power consumed during various
oper-
ating modes of the Itsy pocket computer, which is powered by
a 2.2 Wh Li-ion battery [27]. The power loads used to
estimatebattery lifetime in this paper were taken from [27] in
which the
power consumption of Itsy pocket computer were reported. Let
P represent a set consisting of various actual average
powerloads (both constant and varying). The set P is divided into
twosubsets, PT and PC, where the subset PT consists of15
constantaverage power loads and the subset PC consists of seven
varyingaverage power loads. The average power loads in both
subsets
are downscaled and are used to estimate the lifetime of 1.41
Wh
Li-ion battery as mentioned earlier. See Appendix B, for
details
on the computation of downscaling factor and assumptions.
The
actual and downscaled power loads are summarized in Tables
VI and VII were computed using average current and average
voltage of 3.75 V [27]. So the lifetimes estimated and
measuredare average lifetimes. Given the upper and lower bounds
on
the load values, the models discussed in Section II can be
used
to estimate upper and lower bounds on the actual lifetimes.
From here onward, we will refer average power load used to
estimate battery lifetime as power load for simplicity.
In Table VI, the constant power loads (T1T10) represent
the power consumed during different operating modes of Itsy
computer. In addition, peripheral devices, such as
Microdrive
hard disk [28] and a WaveLAN wireless card [29] were
attached
to Itsy, and power consumptions (T11T15) were recorded for
different operating modes of Itsy and peripheral devices
[16],
[27]. The following letter abbreviations are used to describe
the
operation modes of Itsy and peripheral devices in Table VI
[16],
[27].
1) Itsy: IIdle, MMPEG, DDictation, TTalk1, WWAV1,
and SSleepDC.
2) Microdrive: SStandby and AAccess.
3) WaveLAN: DDoze, RReceive, and TTransmit.
The power loads in Table VII represent the measured power
consumption when Itsy operation is switched between dif-
ferent modes. In Table VII, the second column represents the
actual power measurements, the third column represents the
downscaled power measurements, and the fourth column repre-
sent the time duration in which each power level was
measured.
Cases C1 and C2 have the same load power levels. However,
the
order in which the battery is subjected to power load is
reversed.
In case C1, load power is a decreasing staircase function,
except
for the last period in which the load power jumps up and
remains
constant. In case C2, load power is an increasing staircase
func-
tion and that remains constant at the same power value as
case
C1 during the final period. Case C3 is similar to C2, except
it
has a rest period of 50 min. Case C4 is a periodic repetition
of
C2 for ten cycles (represented by superscript 10 in Table
VII),but the time for each power level is downscaled by a factor
of
ten (also represented by superscript 10 in Table VII); hence
the
total load power consumption in cases C2 and C4 is
identical.
Case C5 is similar to C4 except that the first two power levels
in
C5 are lower than the ones in C4. The time interval column
in
Table VII for cases C4 and C5 has a subscript 200, which
means
that after ten load cycles, the total time duration is 200
min.
Cases C6 and C7 have different rest periods. Cases C3, C6,
and
C7 are used to evaluate the recovery effect of the battery,
since
they contain rest period.
The typical power loads summarized in Tables VI and VII
represent a broad range of loading condition used to exercisethe
battery.
B. Numerical Estimation of Battery Lifetime
Given the partially linearized battery model during
discharg-
ing (v = 0) with the incorporated recovery model [see (12)
and(14)], the discharging coefficients dk ,v , k = 1, 2, 3 for
down-scaled operating nominal power Pba t,no m of 181.2 mW
pre-sented in Table VIII is computed, as per the procedure
described
in Section II-B, and various downscaled power loads in
Tables
VI and VII, a numerical lifetime estimation of 1.41 Wh
Li-ion
battery is computed in MATLAB. Note that all the parame-
ters and the downscaled power load profiles used in the
lifetime
-
7/28/2019 5- Development and Validation of a Battery Model
10/15
830 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 25, NO. 3,
SEPTEMBER 2010
TABLE VIIIMODEL COEFFICIENTS FOR THE NONLINEAR EFFICIENCY
APPROXIMATION FOR
DISCHARGING (v = 0) AT THE NOMINAL POWER LEVEL OF 181.2 mW
FOR1.41 Wh LI-ION BATTERY AT ROOM TEMPERATURE
TABLE IXMEASURED AND ESTIMATED LIFETIMES FOR EACH CONSTANT POWER
LOAD
TABLE XMEASURED AND ESTIMATED LIFETIMES FOR EACH VARYING POWER
LOAD
estimation process is for 1.41 Wh Li-ion battery and is
measured
at room temperature. The downscaled nominal operating input
power Pba t,no m is 181.2 mW, which is obtained by
downscalingthe average battery power flow in the Itsy pocket
computer.
The recovery time constant () computed using the downscaled
load data is 0.016 s1 (see Appendix C). The percentage
ofrecovery is selected as 3.27% because the partially
linearized
battery model during discharging without the recovery
modelunderestimated the battery lifetime by 3.27% on average at
nom-
inal power.
Theresults of lifetime estimation using thepartially
linearized
battery model during discharging (v = 0) with the
incorporatedrecovery model for downscaled power load profiles PT
and PCare summarized in Tables IX and X, respectively. Based on
the
downscaling assumption in Appendix C, the lifetime of 1.41
Wh
Li-ion battery computed using the downscaled power loads
must
be equal to the lifetime of 2.2 Wh Li-ion battery computed
(mea-
sured) using the actual power loads. Henceforth, the
estimated
lifetimes of 2.2 Wh Li-ion battery using the Rakhmatov and
Virudhula battery model [8] [see (6)] for PT and PC are also
TABLE XIMEASURE OF BATTERY RECOVERY
summarized in Tables IX and X along with measured lifetimes
in the first column. The Rakhmatov and Virudhula battery
model
parameters: = 33706 and = 0.75 reported in [16] is used
toestimate battery lifetime. The error between the measured and
the estimated lifetime is computed using (15) and is also
listed
in Tables IX and X
Error(%) =measured lifetime estimated lifetime
measured lifetime 100.
(15)
C. DiscussionIn this section, we analyze and discuss the
performance of
the partially linearized model with the incorporated
recovery
model under varying load conditions. A broad range of
selected
load profiles used to exercise the battery model in this
paper
is a real-time power consumption of Itsy computer under dif-
ferent operating modes [16], [27]. The typical loads
presented
in Tables VI and VII captures both static and dynamic nature
of the power usage observed in many real-time applications.
In addition, to lifetime estimation using the partially
linearized
model with the incorporated recovery model, we also compute
the percentage of recovery observed in cases C3, C6, and C7.
We define a few terms as in [8]. Let Loriginal represent the
esti-mated lifetime for the power profile when no load relaxation
(norest period) is exercised. When the rest period is present, let
denote the rest period in a load profile and let Lunaffected
denotethe expected lifetime as if no recovery took place during the
rest
period of duration , i.e., Lunaffected = Loriginal + . In
general,the lifetime L should be greater than Lunaffected due to
recoveryeffect. The quantity ((L Lunaffected )/Loriginal ) 100%
rep-resents the lifetime extension due to recovery effect. Table
XI
summarizes the recovery percentage (i.e., lifetime
extension)
obtained by using the partially linearized battery model
along
with the incorporated recovery model with respect to Loriginal
.Cases C3, C6, and C7 having a rest period of 50, 35.2, and
24.9 min, respectively, show an increase in estimated
batterylifetime by 0.94%, 4.3%, and 6.7%, respectively, (with
respect
to Loriginal ) due to recovery effect. These observations
ascer-tain the fact that the partially linearized battery model
with the
incorporated recovery model is able to capture the recovery
ef-
fect. To establish the accuracy of the recovery percentage,
we
compare the percentage increase in the lifetime computed
using
the partially linearized model with the incorporated
recovery
model and the percentage increase in the lifetime when the
DU-
ALFOIL simulator is used on the same cases C3, C6, and C7.
The percentage increase in the lifetime with the DUALFOIL
reported in [8] is 1%, 1.7%, and 3.7% for C3, C6, and C7,
re-
spectively. However, the percentage of recovery observed in
C3,
-
7/28/2019 5- Development and Validation of a Battery Model
11/15
AGARWAL et al.: DEVELOPMENT AND VALIDATION OF A BATTERY MODEL
831
C6, and C7 can be slightly higher than the actual recovery of
real
battery. This is due to the fact that the partially linearized
model
underestimates the power losses when the load power is
higher
than Pba t,no m , as shown in Fig. 3. In general, the battery
recov-ery has more profound effect when the power discharge rate
is
high. Since the power discharge rate in C7 is higher than one
in
C6 and C7 exhibits higher percentage recovery, as indicated
in
Table XI.
Intuitively, a battery at a higher SOC must be able to
handle
a large power load better than a battery at a lower SOC.
This
assists in identifying the power load pattern that would result
in
better lifetime. The cases C1 and C2 have the same power
load
values except the order in which the battery is subjected to
load
power is reversed (as described in Section IV-A). As
expected,
the lifetime of C1 is slightly higher than the lifetime of C2.
Case
C4 is a periodic repetition of an increasing staircase as in
C2
for ten cycles, but the time for each power level is
downscaled
by a factor of ten, while the total load power consumption
in
both cases is identical. The battery in case C2 handles
high-load
power at low SOC, while in case C4, the battery is subject
toperiodic variation of both low- and high-load power at low
SOC.
As a result, the lifetime estimated in case C4 is slightly
better
than the lifetime estimated in case C2.
In the case of selected constant loads (see Table VI), the
lifetime estimation widely ranges from 2 h to 10 days. Table
IX
shows the comparison of the accuracy of the lifetime
estimations
between the partially linearized model and the
chemical-based
Rakhmatov and Virudhula battery model [8]. The estimation
error of the partially linearized battery model is less than
10%
on average at nominal load power for the typical constant
loads
listed in Table VI. We observe that the estimation error
increases
as the load power level increases or decreases from the
nominalinput power. This observation is consistent with the
assumption
made during the linearization of nonlinear battery
efficiency
[see (8)] and the validation results presented in Section III.
For
example, the estimation error for 701.4 mW load power, which
is 520.2 mW more than nominal input power, is 9.8%, while
the error for 7.2 mW load power, which is 174 mW less than
nominal input power, is 7.2%. In the case of Rakhmatov and
Virudhula battery model (6), the estimation error increases
as
the load on the battery decreases.
Based on the numerical results presented earlier, we observe
that the inputoutput partially linearized model with
incorpo-
rated recovery model provides reasonably accurate lifetime
es-
timation on average at nominal power in comparison to
thelifetime estimation result obtained from the Rakhmatov and
Virudhula model [8].
V. BATTERY CYCLE LIFE VALIDATION
In general, cycling a battery at different DODs and
charge/discharge power rates affects battery cycle life as
battery
ages. Data in the literature suggests that Wm axba t is a
function ofnumber of cycles, DOD, and nominal charge/discharge
power
level. In this section, we specifically model how the
maximum
rated energy stored in a battery is affected by repeated
charging
and discharging at different power levels given a specific
level
of DOD. Full-discharge cycling test (equivalent to 100% DOD)
is one of many cycling tests. IEEE Standard recommends full-
discharge cycling test as it corresponds to a worst case
scenario,
but there are lots of charge/discharge cycling test at
different
DODs [30]. Incorporation of the DOD into the battery model
is
beyond the scope of this paper.
In this paper, battery cycle life is defined as the number
of
cycles (discharging than charging) the battery can withstand
before the maximum capacity of the battery reduces to 80% of
its initial ampere-hour rating at a specific level of DOD
under
the assumed condition of constant temperature. Battery cycle
life represents a metric different from the chemical
lifetime
definition in Section IV. For a fixed DOD, if the battery is
cycled at a rated charge/discharge power level, the battery
last
for N cycle. Further, smaller rated power levels in each
cycleprolongs the battery cycle life (>N), while the effect of
higherpower shorten the battery cycle life (
-
7/28/2019 5- Development and Validation of a Battery Model
12/15
832 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 25, NO. 3,
SEPTEMBER 2010
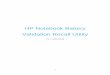
Fig. 5. Maximum rated energy term Wm axba t approximation at the
nominalcharge/discharge power level of 3780 mW for 965 mAh 4.1 V
Li-ion battery.
error for charge/discharge power level closer to nominal
power
level is 2.5%. As the charge/discharge power level deviatesfrom
the nominal power level, the two-norm normalized error
increases, as expected.
Thus, from Fig. 5, we observe that the validation result for
the maximum rated energy Wm axba t is accurate about its
nominalcharge/discharge power level and the error increases
slightly
as the power level deviates from Pba t,no m . This validation
pat-tern is consistent and similar to the pattern observed
during
the validation of the linearized model for Li-ion battery type
in
Section III-D. This is due to the fact that the battery
efficiency
decreases with repeated discharging and charging, as the
inter-
nal resistance of the battery increases, which is consistent
with
the findings of Shim and Striebel [34] on a Li-ion battery.Thus,
in this section, we showed that by approximating the
maximum rated energy term Wm axba t as a function of number
ofcycle, nominal charge/discharge power level at a fixed DOD,
we can incorporate the cycling effect.
VI. CONCLUSION
In this paper, we have shown that the dynamic measure-
ment of the battery SOC was approximated by the partially
linearized (control-oriented) battery model for both
charging
and discharging. A complete mathematical development of the
partially linearized battery model was presented in Section
II-B
and in Appendix A. The model was augmented with an addi-tional
differential equation to capture the recovery effect. Then,
the generalization of the scalable partially linearized model
to
different battery types at different temperatures and its
valida-
tion against the actual data for both charging and
discharging
was demonstrated. Based on the validation results, a
functional
relationship between the model coefficients and temperature
was set forth for lead-acid and Ni-MH battery types. The
model
was found to be reasonably accurate around its nominal input
power level for various battery types at different
temperatures.
The battery model with the incorporated recovery model was
exhaustively exercised under a variety of power loads for
Li-ion
battery lifetime estimation. Actual lifetime measurements
and
the estimated lifetimes using the Rakhmatov and Virudhula
bat-
tery model were given for comparison. By approximating the
maximum rated energy term of the linearized model as a func-
tion of number of cycle and nominal charge/discharge power
level at a specific DOD level, the effect of repeated
charging
and discharging on the overall battery cycle life was
presented.
Although the developed model is linear in the input, it
captures
all the essential nonlinear characteristics of the battery
under
varying load conditions.
The partial linearized inputoutput battery model has been
used successfully for control-oriented power flow management
in an HEV application [11], [26]. Specifically, the model is
very
useful for control when an inverter controls the
currentvoltage
levels (and thus power levels) between the battery and any
de-
vice, such as an electric drive, sensor, or actuator. In
distributed
sensor network application, estimation of battery longevity,
es-
timates of scheduled maintenance, and replacement are some
of the key issues. The usage of the model is computationally
inexpensive and can provide reasonably accurate information
on the SOC of the batteries. This information will assist in
in-telligent network activity scheduling, dynamic rerouting,
and
battery energy aware protocol designs in scenarios, where
bat-
tery maintenance and replacement is impractical.
The accuracy of the partially linearized battery model can
be
improved by selecting different nominal input powers based
on
the operating load power. For example, one can create a set
of
range of load powers and select an associated nominal input
power for each range to lower the deviation between load
power
and nominal input power, andhence to reducethe approximation
error.
APPENDIX A
Consider a general nonlinear state equation x = f(x, u),where x
is the state, and u is the (control) input. A Taylorseries
expansion around the nominal operating input u is givenby
x = f(x, u)|u + f(x, u)u
|uu + H.O.T. (18)where H.O.T. means higher order terms that are
assumed small
and negligible. Therefore, the linearization of (8) about a
nom-
inal battery power Pvba t,no m , v {0, 1}, becomes
Wba t
=[ln(Wba t + d1,v ) + d2,v Pvba t,no m + d3 ,v ] Pv
ba t,no m
Wm axba t
+{[ln(Wba t + d1,v ) + d2,v Pvba t,no m + d3,v]Pba t}
Pba t
Pv
b a t , n o m
Pba tWm axba t
(19)
where Pba t = Pba t (t) Pvba t,no m . Now, we compute the
par-tial derivative in (19) and evaluate at Pvba t,no m
{[ln(Wba t + d1 ,v ) + d2,v Pba t + d3,v ]Pba t}
Pba t
Pvb a t , n o m
-
7/28/2019 5- Development and Validation of a Battery Model
13/15
AGARWAL et al.: DEVELOPMENT AND VALIDATION OF A BATTERY MODEL
833
= {[ln(Wba t + d1,v ) + d2,v Pba t + d3,v ] d2,v Pba t}|Pv
b a t , n o m
= [ln(Wba t + d1,v ) + 2d2,v Pvba t,no m + d3,v ].
(20)Substituting the expression in (20) into (19) results in
the
following equation:
Wba t = [ln(Wba t + d1,v ) + d2 ,v Pvba t,no m + d3,v ]Pvba t,no
m
Wma xba t
[ln(Wba t + d1,v ) + 2d2,v Pvba t,no m + d3,v ]Pba tWma xba
t
.
(21)
For our control purposes, we want Wba t equation to dependon the
actual battery input Pba t (t) rather than Pba t . For this,we
substitute Pba t = Pba t Pvba t,no m into (21)
Wba t =
[ln(
Wba t + d1,v ) + d2 ,v Pv
ba t,no m+ d3,v ]
Pvba t,no m
Wma xba t
[ln(Wba t + d1 ,v ) + 2d2 ,v Pvba t,no m + d3,v ]
Pba t (t) Pv
ba t,no m
Wm axba t(22)
and arrive at the final partially linearized equation for the
battery
SOC
Wba t (t) =d2,v
Wm axba t(Pvba t,no m )
2 [ln(Wba t (t) + d1,v )
+ 2d2,v Pv
ba t,no m + d3 ,v ]Pba t (t)
Wma x
ba t
. (23)
The coefficients dk ,v , k = 1, 2, 3 and v {0, 1} for
differentbattery types are presented in Tables I, III, and V.
APPENDIX B
The discharging and charging efficiency of lead-acid (25 of
18 Ah 12.5 V) battery pack is obtained from [35]. In order
to
obtain discharging and charging efficiency maps of lead-acid
(30
of 12 Ah 12 V) battery pack used in this paper, a
downscaling
is performed.
Let Wm axbat1 be the maximum rated energy of lead-acid
batterypack1 [35] and Wm axbat2 be the maximum rated energy of the
lead-
acid battery pack2, the one used in this paper. We define
scalingfactor = Wm axbat2 /W
m axbat1 . The assumption used in downscaling
the battery efficiency map of [35] to the size used in this
paper is
as follows: let Pbat1 denote the power delivered by battery
pack1 and Pbat2 that of battery pack 2, whenever = Pbat2 /Pbat1
,then for v {0, 1}
bat1 (SOC, Pbat1 , v) = bat2 (SOC, Pbat2 , v). (24)
A similar scaling procedure and assumption is adopted in
down-
scaling the load powers of [16], [27] to the energy level of
Li-ion battery used in this paper: let Wm axbat1 represent the
max-imum rated energy of Li-ion battery 1 (2.2 Wh) and Wm axbat2
be
the maximum rated energy of Li-ion battery 2 (1.41 Wh) usedin
this paper. Let = Wm axbat2 /Wm axbat1 be a scaling factor. The
lifetime of 2.2 Wh battery is same as the lifetime of 1.41
Wh
battery, whenever the Li-ion battery 2 (1.41 Wh) is subject
topower load Pbat2 = Pbat1 , where Pbat1 denote the averagepower
delivered by 2.2 Wh Li-ion battery. Hence, the average
typical power load used in this study for 1.41 Wh Li-ion
battery
is obtained.
APPENDIX C
In Section II-D, we discussed that batteries exhibit
recovery
effect when, during which the SOC increases before, reaching
a
steady-state value. The rate of increase in SOC during
recovery
is approximated using a recovery time constant. In the
recovery
model presented in Section II-D, the parameter [see (14)]
represents the recovery time constant. The value of depends
upon battery type and is often computed using experimental
data. The recovery time constant () of 1.41 Wh battery used
in
this paper is computed by using the downscaled experimental
recovery data of same type 2.2 Wh Li-ion battery from [21].
The
actual data is monotonically increasing and reaches a
steady-
state value over time. In another words, the data consists of
the
transient response of batterys SOC and its steady-state
value.
A simple logarithmic approach is used to compute . This
common procedure is to compute the time constant of a RC
circuit from the transient response. Consider a general
state
equation of an RC circuit with zero input. The state
trajectory
(due to an initial condition) is exponentially decreasing and
is
expressed as follows:
x(t) = x(0)et/ (25)
where x(t) is the state at time t, x(0) is the initial value of
thestate, and = RC is the time constant with R and C being the
resistance and the capacitance, respectively.Taking natural
logarithmic on both side of (25), we get
ln(x(t)) = ln(x(0)) t/. (26)Equation (26) is a straight line
when plotted against time t, withthe slope of1/ and the intercept
ofln(x(0)). Only the slopeof the line determines the time
constant.
To compute the time constant of the complete response of
(14)
due to both constant input and the initial condition, we
modify
the data into an exponentially decreasing response.
Therefore,
we first determine the steady-state value of the response,
and
then, subtract the data from the steady-state value. This
leads
to an exponentially decreasing response. Then, take the
naturallogarithm and perform least-square fit to the response data.
The
fit will be a straight line when plotted against time t and
theslope of the line is negative inverse of RCtime constant.
The procedure described earlier to compute time constant
of a simple RC circuit with nonzero input is used to compute
. The downscaled data of 2.2 Wh Li-ion battery is subtracted
from the steady-state value to obtain an exponentially
decreasing
function. Let Wtrba t (t) be the difference between the
steady-
state value and the complete response of the SOC, with an
initial condition of Wtrba t (0). Similar to (25), W
trba t (t) decays
exponentially to zero as per
Wtrba t = W
trba t (0)e
t/ . (27)
-
7/28/2019 5- Development and Validation of a Battery Model
14/15
834 IEEE TRANSACTIONS ON ENERGY CONVERSION, VOL. 25, NO. 3,
SEPTEMBER 2010
Again, take natural logarithmic on both side of (27) and
result
in
ln(Wtrba t (t)) = ln(W
trba t (0)) t/. (28)
Thus, the function Wtrba t (t) is linear with time t and with
the
slope of1/. Hence, the estimate of is 1/.
ACKNOWLEDGMENT
The authors would like to thank reviewers for their valuable
comments and suggestions. They would also like to thank Rick
Mayer (Purdue University) for his thoughtful discussions on
battery modeling.
REFERENCES
[1] R. Rao, S. Virudhula, and D. Rakhmatov, Battery models for
energyaware system desing, IEEE Comput., vol. 36, no. 12, pp. 7787,
Dec.2003.
[2] M. Doyle, T. F. Fuller, and J. S. Newman, Modeling of
galvanostaticcharge and discharge of the lithium/polymer/insertion
cell, J. Elec-trochem. Soc., vol. 140, no. 6, pp. 15261533,
1993.
[3] T. F. Fuller, M. Doyle, and J. S. Neuman, Simulation and
optimization ofthe dual lithium ion insertion cell, J. Electrochem.
Soc., vol. 141, no. 1,pp. 110, 1994.
[4] M. Pedram and Q. Wu, Design considerations for
battery-powered elec-tronics, in Proc. 36th Design Autom. Conf.,
1999, pp. 861866.
[5] K. C. Syracuse and W. D. K. Clark, A statistical approach to
domainperformance modeling for oxyhalide primary lithium batteries,
in Proc.12th Annu. Battery Conf. Appl. Adv., 1997, pp. 163170.
[6] S. Gold, A PSPICE macromodel of lithium ion batteries, in
Proc. 12thAnnu. Battery Conf. Appl. Adv., 1997, pp. 215222.
[7] C. F. Chiasserini and R. R. Rao, Energy efficient battery
management,IEEE J. Sel. Areas Commun., vol. 19, no. 7, pp.
12351245, Jul. 2001.
[8] D. N. Rakhmatov andS. Vrudhula, Ananalytical high-level
battery modelfor use in energy management of portable electronic
systems, in Proc.
IEEE/ACM Int. Conf. Comput. Aided Design, 2001, pp. 488493.
[9] P. Rong andM. Pedram, Ananalyticalmodel forpredictingthe
remainingbattery capacity of lithium-ion batteries, in Proc. Design
Autom. Test Eur.Conf. Expo., 2003, pp. 11481149.
[10] K. Uthaichana, R. DeCarlo, S. Pekarek, S. Bengea, and M.
Zefran, De-velopment of a control-oriented power flow model for a
parallel hybridelectric vehicle, Purdue Univ., West Lafayette, IN,
Tech. Rep. TR-ECE-06-13, Oct. 2006.
[11] K. Uthaichana, Modeling andcontrolof a parallel hybrid
electric vehicle,Ph.D. dissertation, Purdue Univ., West Lafayette,
Dec. 2006.
[12] A. Tiwari, P. Ballal, and F. L. Lewis, Energy efficient
wireless sensornetwork design and implementation for
condition-based maintenance,
ACM Trans. Sens. Netw., vol. 3, no. 1, pp. 123, 2007.[13] A.
Mainwaring, J. Polastre, R. Szewczyk, D. Culler, and J.
Anderson,
Wireless sensor networks for habitat monitoring, in Proc. 1st
ACM Int.Workshop Wireless Sens. Netw. Appl., 2002, pp. 8897.
[14] J. Khan and R. Vemuri, Energy management in battery-powered
sensornetworks with reconfigurable computing nodes, in Proc. Int.
Conf. FieldProgrammable Logic Appl., 2005, pp. 543546.
[15] S. Park, A. Savvides, and M. B. Srivastava, SensorSim: A
simulationframework for sensor networks, in Proc. MSWIM, 2000, pp.
104111.
[16] D. Rakhmatov, S. Vrudhula, and D. A. Wallach, A model for
batterylifetime analysis for organizing applications on a pocket
computer, IEEETrans. VLSI Syst., vol. 11, no. 6, pp. 10191030, Dec.
2003.
[17] M. R. Jongerden and B. R. Haverkort, Which battery model to
use? inProc. 25th U.K. Perform. Eng. Workshop, 2008, pp. 7688.
[18] S. C. Chapra, Ed., Applied Numerical Methods with MATLAB
for Engi-neers and Scientists. New York: McGraw-Hill, 2005.
[19] M. Hopka, A. Brahma, S. Dilmi, G. Ercole, C. Hubert, S. H.
K. Huseman,G. Paganelli, M. Tateno, Y. Guezennec, G. Rizzoni, and
G. Washington,The 2000 Ohio state university future truck, SAE, OH,
Tech. Rep. SP-167, 2008.
[20] J. Aylor, A. Thieme, and B. Johnson, A battery
state-of-charge indica-tor for electric wheelchair, IEEE Trans.
Ind. Electron., vol. 39, no. 5,
pp. 398409, Oct. 1992.
[21] D. Rakhmatov andS. Vrudhule, Energy management for
battery-poweredembedded systems, ACM Trans. Embedded Comput. Syst.,
vol. 2, no. 3,pp. 277324, 2003.
[22] H. L. N. Wiegman and A. J. A. Vandenput, Battery state
control tech-niques for charge sustaining applications, in Proc.
Int. Congr. Expo.,1998, pp. 6575.
[23] M. Coleman, C. B. Zhu, C. K. Lee, and W. G. Hurley, A
combinedSOC estimation method under varied ambient temperature for
a lead-acid battery, in Proc. IEEE Appl. Power Electron. Conf.
Expo., 2005,pp. 991997.
[24] L. Serro, Z. Chebab, Y. Guezennec, and G. Rizzoni, An aging
model ofNi-MH batteries for hybrid electric vehicles, in Proc. IEEE
Conf. Veh.Power Propulsion, 2005, pp. 7885.
[25] D. Linden and T. Reddy, Eds., Handbook of Batteries, 3rd
ed. NewYork: McGraw-Hill, 2001.
[26] K. Uthaichana, S. Benga, R. DeCarlo, S. Pekarek, and M.
Zefran, Hybridmodel predictive control tracking of a sawtooth
driving profile for anHEV, in Proc. Amer. Contr. Conf., 2008, pp.
967974.
[27] M. Viredazand D. A. Wallach, Powerevaluation of a
handheldcomputer:A case study, Compaq WRL Res. Rep., Palo Alto, CA,
Tech. Rep. WRL-2001-1, May 2001.
[28] Microdrives: 2001. Product specification, 2001.[29] Orinoco
WaveLAN, 2001. Product specification.[30] T. Guena and P. Leblanc,
How the depth of discharge affects the cycle
life of lithium-metal-polymer batteries, in Proc. INTELEC 28th
Annu.
Int. Telecommun. Energy Conf., 2006, pp. 18.[31] S. Drouilhet, A
battery life prediction method for hybrid power appli-caitons, in
Proc. 35th AIAA Aerosp. Sci. Meeting Exhibit., 1997.
[32] M. Coleman, W. G. Hurley and C. K. Lee, An improved battery
char-acterization method using a two-pulsed load test, IEEE Trans.
EnergyConvers., vol. 23, no. 2, pp. 708713, Jun. 2008.
[33] T. R. Crompton, Battery Reference Book, 3rd ed. Boston, MA:
Newnes,2000.
[34] T. R. Shim and K. A. Striebel, Cycling performance of
low-cost lithium-ion batteries with natural graphite and LiFePO4,
J. Power Sources,vol. 119, pp. 955958, Jun. 2003.
[35] C. C. Lin, H. Peng, J. W. Grizzle, and J. Kang, Power
managementstrategy for a parallel hybrid electric truck, IEEE
Trans. Control Syst.Technol., vol. 11, no. 6, pp. 839849, Nov.
2003.
Vivek Agarwal (S98) received the B.E. degreefrom the University
of Madras, Chennai, India, andthe M.S. degree from the University
of Tennessee,Knoxville, TN, in 2001 and 2005, respectively, bothin
electrical engineering. He is currently working to-ward the Ph.D.
degree from the School of NuclearEngineering, Purdue University,
West Lafayette, IN.His doctoral research focuses on power
managementin battery powered interconnectedwireless networks.
In 2005, he was a Research Associate at theHewlett-Packard
Research Laboratories, Palo Alto,
CA . His current research interests include power management in
wireless sen-sor networks, battery modeling, signal and image
processing, nuclear materialdetection, regulation techniques, and
machine learning.
Kasemsak Uthaichana (M07) received the B.S. de-gree in
electrical, computer, and systems engineeringfrom Rensselaer
Polytechnic Institute, Troy, NY, in2000, and the M.S. and Ph.D.
degrees in electricaland computer engineering from Purdue
University,West Lafayette, IN, in 2002 and 2006, respectively.His
doctoral research focused on modelingand powerflow control for
parallel hybrid electric vehicles.
From 2007 to 2008, he was with Caterpillar Inc.,Peoria, IL,where
he wasengagedin integrated powersystems control software for wheel
loader machines.
He is currentlyin the Department of Electrical Engineering,
Chiang Mai Univer-sity, Chiang Mai, Thailand. His research
interests include power management inhybrid vehicles, operational
control of fuel cells, battery management system,and friction
estimation and compensation.
Dr. Uthaichana is an Active Member of the IEEE Control Systems
Society
and the IEEE Power and Energy Society.
-
7/28/2019 5- Development and Validation of a Battery Model
15/15
AGARWAL et al.: DEVELOPMENT AND VALIDATION OF A BATTERY MODEL
835
Raymond A. DeCarlo (F89) He received the B.S.and M.S. degrees in
electrical engineering from theUniversity of Notre Dame, Notre
Dame, IN, in 1972and 1974, respectively, and the Ph.D. degree
fromTexas Tech University, Lubbock, TX.
In 1977, he joined Purdue University, WestLafayette, IN as an
Assistant Professor of electricalengineering, and became an
Associate Professor in1982 andFullProfessor in 2005. Duringthe
summersof 1985 and 1986, he was at the General Motors Re-search
Laboratories. He has authored or coauthored
three books, more than 50 journal, more than 100 conference, and
eight bookchapter/reprint articles. His current research interests
include interdisciplinaryranging from variable structure control,
hybrid optimal control and stability,hybrid electric vehicle
modeling and control, biological modeling and control,as well as
the control and modeling of the software test process.
Dr. DeCarlo was a Secretary Administrator of the IEEE Control
SystemsSociety, and from 1986 to 1992 and from 1999 to 2003, a
member of the Boardof Governors. He was an Associate Editor of
Technical Notes and Correspon-dence, and Survey and Tutorial
Papers, both for the IEEE TRANSACTIONS ONAUTOMATIC CONTROL. He was
a Program Chairman for the 1990 IEEE Con-ference on Decision and
Control (CDC), Honolulu, and a General Chairmanof the 1993 IEEE
CDC, San Antonio. During 2001 and 2002, he was the VicePresident
for Financial Activities for the IEEE Control System Society
(CSS).He was the recipient of CSSs Distinguished Member Award in
1990, the IEEE
Third Millennium Medal in 2000, the EATON Award in Electrical
and Com-puter Engineering (ECE) in 2002, the Motorola Excellence in
Teaching Awardin 2006, and the award for Best Theoretical Paper in
Automatica in 2008. Hewas a Chair of the Purdue University Senate
and a Committee on InstitutionalCooperation (CIC) Faculty
Fellow.
Lefteri H. Tsoukalas (M89) received the Ph.D.degree from the
University of Illinois, Urbana-Champaign, in 1989.
He was a Professor and Former Head of theSchool of Nuclear
Engineering, Purdue University,West Lafayette, IN, where he also
holds a courtesyprofessorial appointment in construction
engineeringand management. His current research interests in-clude
in developing smart energy methodologies. Hehas authored or
coauthored more than 200 researchpublications in the area including
a book titled Fuzzy
and Neural Approaches in Engineering, (New York: John Wiley and
Sons,1997). He was with the faculty of the University of Tennessee,
Knoxville, Aris-totle University, and the University of Thessaly.
He was also a Researcher andan Advisor, and a Consultant at the
Japan Atomic Energy Research Institute, theMinistry of Education,
ON, Canada; the International Atomic Energy Agency;the Agency for
Science, Technology and Research of the Government ofSingapore; and
the U.S. Department of Energy.
Dr. Tsoukalaswas the recipient of numerous awards and
recognitions includ-ing Best Teacher Award at Purdue, Fellow of the
American Nuclear Society,and the 2009 recipient of the Humboldt
Prize.