Embed Size (px)
Citation preview

1432 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 48, NO. 9, SEPTEMBER 2000
A Fast Linear Programming Algorithm for Blind EqualizationZhi Ding and Zhi-Quan Luo
Abstract—A fast implementation of a special non-MSE costfunction for blind equalization is presented here. This baud-rateequalization algorithm is based on a convex cost function coupledwith a simple linear constraint on the equalizer parameters. Fora generic class of channels with persistently exciting quadratureamplitude modulation input signals, this new algorithm allows theconvergence of equalizer parameters to a unique global minimumachieving intersymbol interference suppression and carrier phaserecovery.
Index Terms—Blind deconvolution, convexity, equalization,global convergence, intersymbol interference, linear program-ming.
I. INTRODUCTION
B LIND equalization of an unknown, nonminimum phasechannel is an important problem in data communication
systems. A blind equalizer achieves parameter adaptation basedon the observed channel output anda priori knowledge of somedistributional or statistical properties of the input sequence[1], [2], [4]. By eliminating the need for training signals, ablind receiver can begin its self-adaptation without disruptingthe normal flow of data transmission. It can also recover fromsystem failures resulted from disrupted connections that mayhave caused equalizers to lose its desired parameter settings.
Although fractionally spaced blind equalization algorithmshave received much attention recently, baud-rate equalizers re-main useful and practical for communication channels that ei-ther lack excess bandwidth or exhibit common zeros. In thispaper, we focus on the problem of blind linear baud-rate equal-ization.
Although baud-rate equalizers such as the constant modulusalgorithm (CMA) [2], [5] and the Shalvi–Weinstein algorithm[3] are not globally convergent for arbitrary initialization [9],[10], we have presented in [15] a linearly constrained blindequalizer that is globally convergent with a convex cost. Thisformulation does not attempt to directly identify the exact gainof the zero-forcing equalizer and focuses instead on generatingan equalizer output that is a scaled version of the channel input.This approach of intersymbol interference (ISI) eliminationwithout gain identification makes it straightforward to estimateindependently the unknown scalar gain by, for example,
Paper approved by R. A. Kennedy, the Editor for Data Communications,Modulation, and Signal Design of the IEEE Communications Society. Man-uscript received February 22, 1999; revised December 15, 1999. This workwas supported in part by the U.S. National Science Foundation under GrantCCR-9996206 and in part by the Natural Sciences and Engineering ResearchCouncil of Canada under Grant OPG0090391.
Z. Ding is with the Department of Electrical and Computer Engineering, Uni-versity of Iowa, Iowa City, IA 52242 USA (e-mail: [email protected]).
Z.-Q. Luo is with the Department of Electrical and Computer Engineering,McMaster University, Hamilton, ON L8S 4K1, Canada (e-mail: [email protected]).
Publisher Item Identifier S 0090-6778(00)07533-4.
matching the power of the channel input and equalizer output.Any additional constant complex phase ambiguity can also bereadily resolved with differential encoding.
Unfortunately, the minimization of the cost in [13] and[15] was realized either via approximation or via iterativeblock data estimation. The resulting algorithms can be slow andtedious, making them undesirable for practical implementation.In this paper, we present a computationally efficient linear pro-gramming formulation to minimize the convex cost function.The new approach demonstrates a vast improvement of conver-gence speed, as evidenced by computer simulation examples.In addition, the linear programming approach requires substan-tially fewer data samples for training and much shorter equalizerlength.
II. BASICS OFQUADRATURE AMPLITUDE MODULATION
(QAM) BLIND EQUALIZATION
In a baseband representation of the QAM channel equaliza-tion system, the original symbol sequence takes valuesfrom a complex signal set (known as the QAM constella-tion) in a manner such that all possible finite symbol subse-quences occur with nonzero probability. This persistent exci-tation assumption on the input is weaker than the typical andsomewhat idealistici.i.d. assumption common in other works.The complex channel input is transmitted through a non-ideal channel, assumed to be linear, causal, and (bounded-inputbounded-output) stable. The channel transfer function can bewritten as
(1)
where signifies the set of complex numbers and repre-sents the channel impulse response sequence. When the channelin (1) is such that there is more than one nonzero element in
, the channel output
suffers from ISI and the removal of this linear distortion is thetask of channel equalizers.
A linear channel equalizer is a linear filter that isapplied to the channel output in order to eliminate the ISI.Initially, we may take this filter as being stable and potentiallynoncausal (doubly infinite), and of the form
(2)
so as to deal with nonminimum phase channels. The time depen-dence of the equalizer parameters signifies that they are subject
0090–6778/00$10.00 © 2000 IEEE

IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 48, NO. 9, SEPTEMBER 2000 1433
to adaptation via an algorithm to be specified. By denoting theadaptive equalizer parameter vector as
(3)
and the equalizer input signal regressor as
(4)
the equalizer output can then be written as an inner product
(5)
The ideal objective of any channel equalizer is toachieve distortionless reception
or simply
(6)
where we can tolerate a fixed integer delay. (The strict formof this objective (6) will be modified subsequently.) Such anobjective translates into the identification of channel inverse bythe equalizer, i.e.,
where is understood to be the stable,(potentially) doubly infinite (noncausal) inverse of the channel
. Note that the existence of is only possiblefor channels without zeros on the unit circle. The goal ofequalization could be achieved by adapting the equalizerparameters to minimize the mean square error (MSE) betweenthe appropriately delayed channel input and the equalizeroutput, when the original channel input signal is available tothe receiver as a training sequence.
In blind equalization, the original sequence is unknown to thereceiver except for its probabilistic or statistical properties overthe known alphabet . Usually this signal constellationhas symmetrical properties such that
i.e., the constellation is 90rotation invariant. If the statisticsof the input data reflects this same symmetry (which is typical)over , then any phase rotation does not cause any sta-tistical changes in the channel output. Thus, the data recoveredfrom blind equalization will exhibit an intrinsic phase ambiguityof and the best possible equalization result would be
(7)
which relaxes the objective (6). The remaining phase ambiguitycan be resolved through differential encoding of the input data.A further relaxation of the ideal objective (6) is necessary sincein practical applications only equalizers with a finite number ofadjustable parameters can be implemented rather than those of
(2). Typically, these finite parameters are arranged in the formof a causal transversal filter
(8)
Since a finite impulse response equalizer can only approximatethe desired impulse response (7), a quantizer should be usedto recover the original channel input from the equalizer output
. This is often regarded as thepractical objective of blindequalization.
In designing our new equalizer based on linear programming,we do not attempt to identify the exact gain of channel inverseand focus instead on the elimination of ISI which is the primaryobjective of channel equalization [12]. Consequently, it is notessential to recover the exact (complex) gain of the channel in-verse because once the ISI is removed such that the equalizeroutput is
then it is straightforward to estimate the unknown gainbycomparing the power of with that of the . The constantphase ambiguity can also be readily resolved by the utiliza-tion of differential encoding, especially if it is a multiple of .
III. EQUALIZATION BASED ON LINEAR PROGRAMMING
We assume the QAM constellation is such that the real andimaginary components are independent and identical (e.g., thesquare type) with
or can be transformed into such by a rotation. We can denote thetotal system (channel and equalizer) as
where is the impulse response of the combined systemgiven by
with equalizer output . The equalizer istaken to be doubly infinite and noncausal to permit completeremoval of ISI. This assumption needs relaxation (as shown ear-lier) so that the equalizer remains in the truly implementable fi-nite dimensional parameter space.
The cost function for minimization is chosen as
(9)

1434 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 48, NO. 9, SEPTEMBER 2000
The convexity of with respect to can be seen as follows:both and are linear in ; therefore and
are convex functions of. Since is the sum ofthese convex functions, it is also convex. Without any constrainton , the convex cost function achieves a trivial global minimumat , with equalizer output .
In order to make the cost function useful, a linear con-straint
(10)
was proposed in [15] on the equalizer parameter vector to avoidthe all-zero solution without compromising the ability of theequalizer to remove ISI and carrier phase error. Due to the lin-earity of the constraint, the convexity of the cost function ismaintained and global convergence is therefore assured.
We have shown [15] that, under this parameterization, simul-taneous removal of ISI and carrier phase error globally mini-mizes the cost function. The main results are as follows.
Theorem 3.1:For a linear channel with a stable (noncausal)inverse impulse response sequence satisfying
a doubly infinite noncasual equalizer with parameter setting
(11)
minimizes the blind convex cost
where
and where is chosen such that
(12)
Remarks and Comments:Before proceeding onto imple-mentation issues related to developing an algorithm based onthe above convex function, we first examine the theoreticallimitations and other considerations of the above scheme.
1) The linear constraint can be changed to almost any equa-tion involving the real and the imaginary parts of[16].
2) Convexity is an essential property in the above formu-lation because it guarantees that when we use causal fi-nite-dimensional practical equalizers, the global conver-gence tendencies of the algorithm, or unimodality, arepreserved. This behavior is a consequence of convexitysince truncation (setting many taps zero) is a form oflinear constraint which does not destroy convexity. Con-vexity also ensures that one can approximate arbitrarilyclosely the performance of the ideal nonimplementabledoubly infinite noncausal equalizer parameter setting.
3) The minimum (11) not only achieves zero ISI but also re-sults in near-ideal phase recovery,i.e., except for an am-biguity of in the phase, the output of the equalizer is
equal to the input since the channel/equalizer convolutionis given by
Hence, our formulation achieves simultaneous channelequalization and carrier phase recovery.
Linear Programming Formulations:Suppose we restrict thetotal number of taps in the equalizer to be . Then, thedimension of is .Given the block of equalizer input data , then theoutput of the equalizer is where is the signalregressor (4). Based on Theorem 3.1, the equalizercan befound by
minimize
subject to (13)
Note that
and
Introducing two auxiliary variables and , we can reformu-late the above minimization problem as the following linear pro-gram:
minimize
subject to Im
(14)
The equivalence of (14) to (13) follows from the fact that,when at optimality, the variables and must be equal to
and , respec-tively.
The above linear program (14) has variables andconstraints. It can be solved efficiently using the recently
developed interior point methods. The number of iterations re-quired to solve the linear program is , where is thenumber of bits required to encode the input data inbinary. Each iteration requires arithmetic operations.
An alternative, yet equally effective, formulation of the equal-ization problem is the following:
minimize
subject to (15)

IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 48, NO. 9, SEPTEMBER 2000 1435
This is based on the fact that Theorem 3.1 remains true if weminimize the convex cost
instead of the convex cost
The equivalent linear programming formulation of (15) is thefollowing:
minimize
subject to Im
(16)
Notice that this linear program has only constraints andvariables. Thus, it is simpler than (14) and generally
leads to faster convergence time for the equalizer. An entirelysimilar formulation is to minimize the imaginary part of thecombined channel output only, leading to the following linearprogram:
minimize
subject to Im
(17)
IV. I MPLEMENTATION AND SIMULATION
We demonstrate the effectiveness of our linear programmingequalization algorithms through two simulation examples. In allof our examples, the linear programs are solved using an interiorpoint optimization code [17] developed using Matlab.In our simulations, the severity of ISI (eye-closeness) can bedescribed by the scatter-plots of equalizer output signal samples.The combined channel and equalizer is an open eye system if thesignal constellation can be identified from the scatter plot.
In the first example, we tested the following all-pass channelwith a phase error of :
The input sequence is ani.i.d. 16-QAM signal. This channelsetting was used in [15] where an equalizer of length 21 anda total of 1000 data samples are needed for the so-calledblock algorithmbased on smoothing. In contrast, the linearprogramming channel equalization algorithm requires only600 data samples and an equalizer of length 17. As seen fromFig. 1(a), the channel output before equalization is completelyscrambled due to ISI. The real and imaginary parts of thechannel impulse response are depicted in Fig. 1(b) and (c).
Fig. 1. (a) Channel output and (b) real and (c) imaginary parts of the channelimpulse response before equalization.
Fig. 2. (a) Equalized channel output and (b) real and (c) imaginary parts of thecombined impulse response.
Fig. 2(a) shows the channel output after equalization, whileFig. 2(b) and (c) shows the real and imaginary parts of thecombined impulse response of the channel and the equalizer.As can be seen, the channel has been well equalized since theeye diagram is completely open and the combined impulseresponse is very close to the ideal delta function. The phaseerror has also been corrected but, as Fig. 2(c) indicates, aphase shift remains. The improvement on the convergencespeed is dramatic: the linear programming approach ( )requires only about 20 iterations, while the gradient descentalgorithm or the block algorithm of [15] (both based onapproximation) require from 200 up to 10 000 iterations.
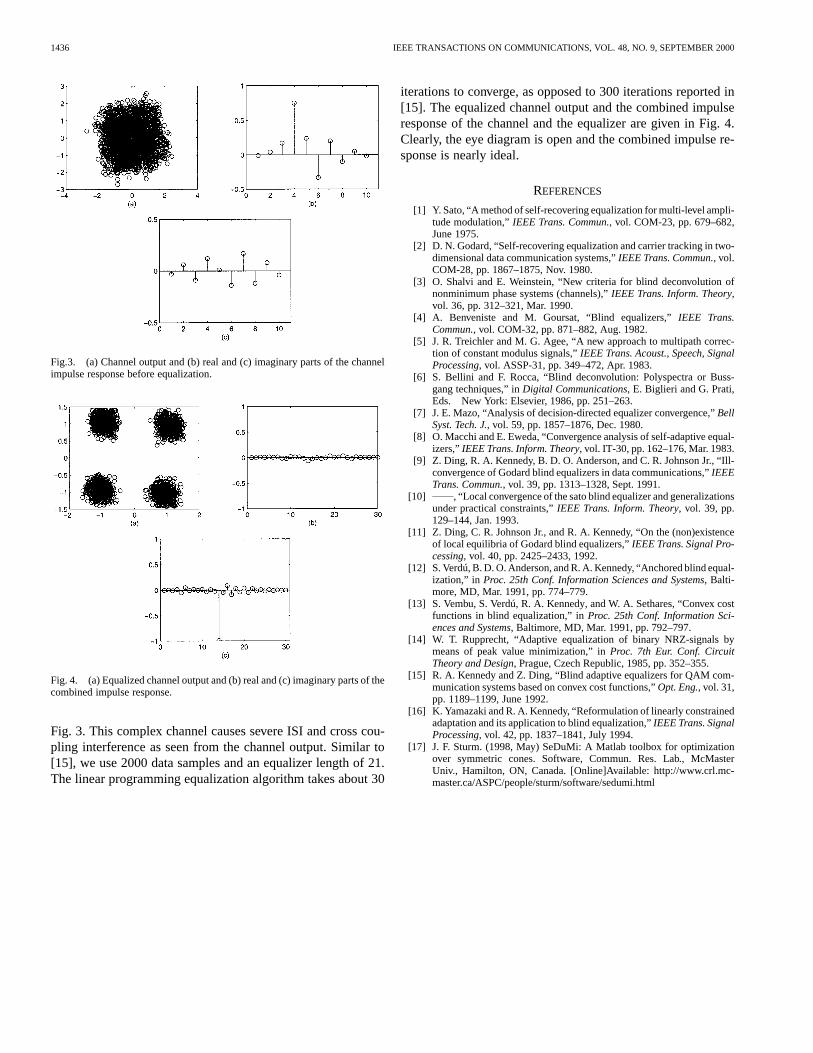
We now test a complex channel whose real part and imagi-nary part of its impulse response are shown in the example of [4]and also in [15]. Suppose the input sequence is ani.i.d. QPSKsignal. The channel output and impulse responses are given in
1436 IEEE TRANSACTIONS ON COMMUNICATIONS, VOL. 48, NO. 9, SEPTEMBER 2000
Fig.3. (a) Channel output and (b) real and (c) imaginary parts of the channelimpulse response before equalization.
Fig. 4. (a) Equalized channel output and (b) real and (c) imaginary parts of thecombined impulse response.
Fig. 3. This complex channel causes severe ISI and cross cou-pling interference as seen from the channel output. Similar to[15], we use 2000 data samples and an equalizer length of 21.The linear programming equalization algorithm takes about 30
iterations to converge, as opposed to 300 iterations reported in[15]. The equalized channel output and the combined impulseresponse of the channel and the equalizer are given in Fig. 4.Clearly, the eye diagram is open and the combined impulse re-sponse is nearly ideal.
REFERENCES
[1] Y. Sato, “A method of self-recovering equalization for multi-level ampli-tude modulation,”IEEE Trans. Commun., vol. COM-23, pp. 679–682,June 1975.
[2] D. N. Godard, “Self-recovering equalization and carrier tracking in two-dimensional data communication systems,”IEEE Trans. Commun., vol.COM-28, pp. 1867–1875, Nov. 1980.
[3] O. Shalvi and E. Weinstein, “New criteria for blind deconvolution ofnonminimum phase systems (channels),”IEEE Trans. Inform. Theory,vol. 36, pp. 312–321, Mar. 1990.
[4] A. Benveniste and M. Goursat, “Blind equalizers,”IEEE Trans.Commun., vol. COM-32, pp. 871–882, Aug. 1982.
[5] J. R. Treichler and M. G. Agee, “A new approach to multipath correc-tion of constant modulus signals,”IEEE Trans. Acoust., Speech, SignalProcessing, vol. ASSP-31, pp. 349–472, Apr. 1983.
[6] S. Bellini and F. Rocca, “Blind deconvolution: Polyspectra or Buss-gang techniques,” inDigital Communications, E. Biglieri and G. Prati,Eds. New York: Elsevier, 1986, pp. 251–263.
[7] J. E. Mazo, “Analysis of decision-directed equalizer convergence,”BellSyst. Tech. J., vol. 59, pp. 1857–1876, Dec. 1980.
[8] O. Macchi and E. Eweda, “Convergence analysis of self-adaptive equal-izers,”IEEE Trans. Inform. Theory, vol. IT-30, pp. 162–176, Mar. 1983.
[9] Z. Ding, R. A. Kennedy, B. D. O. Anderson, and C. R. Johnson Jr., “Ill-convergence of Godard blind equalizers in data communications,”IEEETrans. Commun., vol. 39, pp. 1313–1328, Sept. 1991.
[10] , “Local convergence of the sato blind equalizer and generalizationsunder practical constraints,”IEEE Trans. Inform. Theory, vol. 39, pp.129–144, Jan. 1993.
[11] Z. Ding, C. R. Johnson Jr., and R. A. Kennedy, “On the (non)existenceof local equilibria of Godard blind equalizers,”IEEE Trans. Signal Pro-cessing, vol. 40, pp. 2425–2433, 1992.
[12] S. Verdú, B. D. O. Anderson, and R. A. Kennedy, “Anchored blind equal-ization,” in Proc. 25th Conf. Information Sciences and Systems, Balti-more, MD, Mar. 1991, pp. 774–779.
[13] S. Vembu, S. Verdú, R. A. Kennedy, and W. A. Sethares, “Convex costfunctions in blind equalization,” inProc. 25th Conf. Information Sci-ences and Systems, Baltimore, MD, Mar. 1991, pp. 792–797.
[14] W. T. Rupprecht, “Adaptive equalization of binary NRZ-signals bymeans of peak value minimization,” inProc. 7th Eur. Conf. CircuitTheory and Design, Prague, Czech Republic, 1985, pp. 352–355.
[15] R. A. Kennedy and Z. Ding, “Blind adaptive equalizers for QAM com-munication systems based on convex cost functions,”Opt. Eng., vol. 31,pp. 1189–1199, June 1992.
[16] K. Yamazaki and R. A. Kennedy, “Reformulation of linearly constrainedadaptation and its application to blind equalization,”IEEE Trans. SignalProcessing, vol. 42, pp. 1837–1841, July 1994.
[17] J. F. Sturm. (1998, May) SeDuMi: A Matlab toolbox for optimizationover symmetric cones. Software, Commun. Res. Lab., McMasterUniv., Hamilton, ON, Canada. [Online]Available: http://www.crl.mc-master.ca/ASPC/people/sturm/software/sedumi.html





























