Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-10, NO. 7, JULY 1980
probability and cost," Educational and Psychological Measurement,vol. 15, no. 4, pp. 462-477, 1955.
[13] J. Rasmussen and A. Jensen, "Mental procedures in real-life tasks:A case study of electronic troubleshooting," Ergonomics, vol. 17,no. 3, pp. 293-307, 1974.
[14] K. T. Wescourt and L. Hemphill, "Representing and teachingknowledge for troubleshooting/debugging," Institute for Mathe-matical Studies in the Social Sciences, Rep. No. 292, StanfordUniv., CA, 1978.
[15] J. S. Brown and R. R. Burton, "Diagnostic models for proceduralbugs in basic mathematical skills," Cognitive Sci., vol. 2, no. 2, pp.155-192, 1978.
[16] J. W. Rigney and D. M. Towne, "Computer techniques for analyz-ing the microstructure of serial-action work in industry," HumanFactors, vol. 11, no. 2, pp. 113 -122, 1969.
[17] A. Newell and H. A. Simon, Human Problem Solving. EnglewoodCliffs, NJ: Prentice-Hall, 1972.
[18] A. Newell, "Production systems: models of control structures," inVisual Information Processing, W. G. Chase, Ed. New York:Academic, 1973, Ch. 10.
[191 R. B. Wesson, "Planning in the world of the air traffic controller,"Proc. Fifth Int. Joint Conf Artificial Intell., Massachusetts Instituteof Technology, Aug. 1977, pp 473-479.
[201 I. P. Goldstein and E. Grimson, "Annotated production systems: amodel for skill acquisition," Proc. Fifth Int. Joint Conf: ArtificialIntell., Massachusetts Institute of Technology, Aug. 1977, pp.311-317.
[21] S. J. Pellegrino, "Modeling test sequences chosen by humans infault diagnosis tasks," MSIE thesis, Univ. Illinois at Urbana-Champaign, 1979.
[22] F. Hayes-Roth, D. A. Waterman, and D. B. Lenat, "Principles ofpattern-directed inference systems," in Pattern-Directed InferenceSystems, D. A. Waterman and F. Hayes-Roth, Eds. New York:Academic, 1978, pp. 577-601.
A Feedback On-Off Model of Biped Dynamics
HOOSHANG HEMAMI, MEMBER, IEEE
Abstract-A feedback model of biped dynamics is proposed where theinternal and external forces which act on the skeleton are unified as forcesof constraint, some intermittent and some permanent. It is argued thatthese forces are, in general, functions of the state and inputs of the system.The inputs constitute gravity and muscular forces. This model is particu-lady suited for understanding the control problems in all locomotion. Itencompasses constraints that may be violated as well as those that cannotbe violated. Applications to motion in space, locking of a joint, landing on
the ground, and Initiation of walk are discussed via a simple example. Ageneral projection method for reduction to lower dimensional systems isprovided where, by defining an appropriate coordinate transformation, a
prescribed number of forces of constraint are eliminated. Finally an
application of the model in estimating inputs (joint torques) is brieflydussed.
I. INTRODUCTION
J N THE PAST a large amount of work has beendevoted to problems of human locomotion, notably
walking [1]-[4]. A number of mechanical linkage modelshave been proposed [1], [2], [5]. The purpose of this workis to provide a conceptual dynamic model that is particu-
Manuscript received June 4, 1979; revised February 19, 1980 andMarch 17, 1980. This work was supported in part by the Department ofElectrical Engineering, Ohio State University, and in part by NSF GrantENG 78-24440. This paper was presented at the 1979 InternationalConference on Cybernetics and Society, Denver, CO.The author is with the Department of Electrical Engineering, Ohio
State University, Columbus, OH 43210.
larly suited for understanding and implementing controlof biped motion. Human physical activities involvelocomotion, dance, sport, and other task- and rest-relatedmovements. Some major characteristics of all these activi-ties are as follows.
1) Variability of the number of degrees of freedom ofthe system, e.g., knees and elbows are locked andunlocked, feet are raised from ground or set onground, and the body is brought in contact withother objects.
2) Often some portion of the system is in motion whileothers are stationary.
3) Large variations occur in angles, angular velocities,and speeds so that linear models are not sufficient.
The first characteristic requires proper treatment ofdifferent constraints and incorporation of them in themodel. The second requirement calls for availability ofprojection onto smaller spaces, and, finally, requirementthree calls for a nonlinear model.The model presented here is able to satisfy all three
attributes. Notably, it provides a unified view of thedifferent constraints: joint connections, locking joints, re-
action forces, and collision. It shows how to deal withtransitions from one constrained configuration to another.This model should make possible a better understandingof functional human dynamics. It does not, however,
0018-9472/80/0700-0376$00.75 C 1980 IEEE
376

377HEMAMI: MODEL OF BIPED DYNAMICS
address the control problem itself nor the roles of theneural, muscular, vestibular, and proprioceptive systemsof the body [6]-[9]. Also, arriving at the parameters of thismodel may be quite difficult, particularly insofar as inser-tion of muscle forces is concerned.
In what follows, first the general model is presented inSection II. An example is provided in Section III, anddifferent motions for the example are discussed. Moredetailed analysis and other examples may be found in[10]-[16]. The projection of the larger dimensional systemon lower dimensional systems is discussed in Section IV.The estimation of some inputs from the model is dis-cussed in Section V.
II. THE MODEL
The model is used to consider gross body motion. Itconsists of a number of links connected by simple joints[4], [5], with different degrees of freedom. A reasonablenumber for the segments is seventeen [4]. The actualnumber of segments is somewhat irrelevant, however.There is a school of thought that starts with lower dimen-sional models and increases the dimensionality gradually[5]. The alternative is to start with a more realistic modelrequiring a reasonably large dimension [4]. Each of thesetwo approaches has its own merit.
In both approaches there are twelve state variables foreach link in four groups of three: the three coordinates ofthe center of gravity of the link in an inertial coordinatesystem, the three spatial rotation (Eulerian) angles de-scribing the motion of the system about its center ofgravity, the three translational velocities for the center ofgravity, and the three Eulerian angular velocities. The sixlatter state variables are respectively the derivatives withrespect to time of the former six state variables.Once the model is selected, D'Alembert's principle is
used to write six equations of motion for eachsegment-three translational accelerations for the centerof gravity and three rotational accelerations. For the nlink model there are 6n equations of acceleration. Thesetogether with the 6n associated velocity equations can bewritten in state space form as
Q
Muscular
Gravity
Wind
Passive.1
E PO"Ground
Friction E4
Collision - *r PLocking i
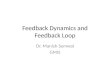
Fig. 1. Comparison of forces with Hatze's notation.
U
Center ofGravity
Fig. 2. Constrained model for biped dynamics.
body collides with an external object and consequentlythe point of contact is immobilized. Such collision forcesare initially impulsive, as will be shown. After the colli-sion, if contact is maintained, additional forces of con-straint are necessary [11].
It is instructive to compare the variables appearing in(1) with those of Hatze [4]. The comparison of forces isshown in Fig. 1. The model here has no muscle dynamics,while Hatze includes dynamics for every muscle.To every force of constraint corresponds a constraint in
the state. The totality of the constraints may be describedby a vector of r simultaneous algebraic equations:
C(X) =O (2)
where vector C may be divided into four subsetsCl, C2, C3, and C4 corresponding to the different types ofconstraints defined above.
Based on (1) and (2), it has been proven in [12] thatwhen a constraint C(X) = 0 is satisfied, the correspondingforce of constraint y is a function of the state X and theinput U
x=(X, U, rl r2,r3,74)
where all variables are referred to a stationary inertialframe, where X is of dimension 12n, U is the totality ofexternal, gravity, and muscular forces, and F =
(rl, r2,r3,r4)T are the forces of constraint, divided intofour subsets r,Ir2,r3, and r4. The subset r, are the forcesof constraint corresponding to constraints due to theconnections (i.e., joints) of the biped. These constraintscannot be violated under normal conditions. The subsetr2 are the forces of constraint pertaining to those jointconstraints that may be voluntarily controlled, maintainedor violated by wish (e.g., locked elbows, knees, etc.). Thesubset r3 contains the forces of reaction under the foot.Subset r4 are other forces of constraint that arise if the
More appropriately, -y is a function of certain subsets of Xand U. When the constraint is violated
y = 0. (4)Precise formulas for computing forces of constraint are
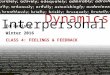
provided in [12] and are not repeated here.Based on (3) and (4), the feedback model of Fig. 2 is
proposed for biped dynamics. When any constraint issatisfied, its feedback loop that produces y is on. Whenthe constraint is violated, the feedback loop is off. Otherauthors have measured forces of constraint and docu-mented them as functions of time [1]. The present modelis different from previous models because it explicitly
(1) y=y(X, U). (3)

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-10, NO. 7, JULY 1980
shows the constraint forces as functions of the state andinputs.
For this model, the original dimension of the system ismaintained at all times. When the constraints are appliedthe motion of the system is limited to subspaces of thelarger state space. For sensing and control, the entire stateis available at all times. Also from the state, the coordi-nates of any other desirable point, e.g., center of gravity,center of the head, may be computed at any time. Thefunction g(X) calculates the center of gravity of the bodyat all times (Fig. 2). Actually, one may conjecture thatsuch computations may take place in the human brain.As will be shown via a simpler example, this model
satisfies all conditions that are essential for effective con-trol of locomotion [2,p.360]. It allows for rapid or slowlocomotion with the option of deliberately violating cer-tain constraints and maintaining others. Of course, theconstraints that are permanently maintained (L'l) cannotbe violated unless excessive external forces are applied(crash and collision injury). With this background, aplanar three-link model is discussed below which is sub-jected to constrained motion on surfaces with dry friction.
III. EXAMPLE
The example (Fig. 3) discussed below is an extendedversion of the three-link biped model [12] in the frontalplane. The equations of this model are derived in theAppendix. It is intended to demonstrate all four types ofconstraint. In order to demonstrate locking, a simplemechanism in the form of an appendage is added to thetorso that prevents rotation of the right leg around thebody beyond 90 degrees.The torso and the associated forces that act on it are
shown in Fig. 4. The right and left legs are shown in Figs.5 and 6, respectively. The forces of constraint r specifiedin (1) may now be specified in detail:
r, = (F2G2F3G3)Tr2= (F6G6)T (5)
I73= (FIG1)T174= (F5G5)T
Let Z and Z be
Z= (X I, X2, X3,y1,Y2,Y3, 01' 02 03)T
z = (xl, x2,23,JUJ2Y31, ol, d2, 3Twhere (x,,y,), i = 1,2, 3 are, respectively, the coordinates ofthe center of gravity of link i, 0i, i= 1,2,3 is the angle oflink i with respect to the vertical, xi,i,i= 1,2,3 are thetranslational velocities of the center of gravity of link i,and di, i = 1,2,3 is the angular velocity of link i.The state of this system X is composed of position Z
and velocity Z written in the compact form
X=(Z,Z)T.
/ e0,y
eII,/
D
x
Fig. 3. Three link biped in the plane.
U2N)
Fig. 4. Torso.
/ U3F3
*C.m3O
G,
Fig. 5. Right leg.
G4i l
Fig. 6. Left leg.
The time derivative of X:
X=(Z Z)T (7)is composed of nine velocities Z and nine accelerations Z.The state space equations of the system are the 18
differential equations relating to X to X. Nine of these arethe acceleration equations given in the Appendix. The
378

HEMAMI: MODEL OF BIPED DYNAMICS
other nine are the identity
Z=Zthat relates nine components of X to nine components ofX. A number of motions is discussed below for thismodel.
Case 1-Free Motion in Space (Fig. 7(a))
For this motion, only F, are active and the remainingforces are zero:
ri = (F2G2F3G3)T
where F2 and F3 are horizontal components and G2 andG3 are vertical components of the connection forces atjoints B and C (Fig. 4).
The connection constraints at joints B and C are
xi + (11 - k,)sinO, + d2Cos92+ k2sin92- X2=0
Yl + (11- kl)cosO1 - d2sin92+ k2cosO2-Y2=Ox2- k2 sin o2 + d2 cos 02 + (13 -k3)sin 3 - X3 = 0
Y2 - k2cos02- d2 sin 02 + (13 - k3)cos 03 -y3 = 0.
(8)
A
__
(a)Fig. 7. Free motion in space.
(b)
{}xD
I ~~~~~~~x(a) (b)
Fig. 8. Motion in space with locked joint.
If the motion in space is to be studied, one may use theapproach in [12] as follows.
a) Set F2, F3, and F4 equal to zero in (Al)-(A9) in theAppendix, and call the resulting equations spaceequations (SEQ).
b) From SEQ and the constraints (8) compute, as in[12], the forces of constraint
rF =rF(X, U) (9)where vector U consists of gravity and torque actua-tors u2 and U3 at the hip, as shown in the Appendix.
The resulting system is shown in Fig. 7(b). Equations (9)and (1):
X=f(X, U,rI0, 0,0)describe the motion of the system.
Case 2-Locked Joint in Space (Fig. 8(a))
Suppose the right leg is turned 90° and is preventedfrom further rotation by the appendage. Further, it ispressed against the appendage by some of the componentmuscles of u2. This is a very simple case by which thelocking mechanism is explained. The actual lockingmechanisms of the body are, of course, much more com-plex and interesting. For example, the knee joint lock is ascrew structure [17]-[20]. The present model also demon-strates one important feature of the lock: it is possible tomaintain the constraint by the action of a subset ofmuscles involved while other muscles that are instrumen-tal in bringing the limb to the locked position may rest[13], [19].When the lock is in effect, in addition to F1, the forces
F2 are also active
F2= (F6G6)T. (10)
In addition to the four constraints of (8), the followingtwo constraints hold:X2- k2sin92- (d2+ e)coso2-x1 - (1I - k1 - e)sinO1 =0
Y2-k2cos02+ (d2+ e)sino2-Yl - (11- k - e)cos91 =0.
(I 1)Analogous to Case 1, one may compute
Fl =F(X, U)
F2=F2(X. U). (12)The system model is shown in Fig. 8(b). The transition
from unlocking to locking and vice versa are analogous toCases 3 and 6 below. Since (8) are always satisfied asimpler alternative for the locking constraint (11) is possi-ble. Equations (8) and (11) may be combined to derive asingle constraint for the locking condition:
01- 02 = 7r~1 22If this formulation is used, the corresponding force hasone component Y2:
F6= Y2sin02
G6= Y2cos 02
Case 3- One Leg Landing (Fig. 9(a))
The model descends to the ground on point A, and thispoint is immobilized instantaneously both in x and ydirections, at the point of contact. This situation mayhappen when one lands in a pothole. At the time ofimpact, impulsive forces with amplitudes Fli and G1i acton the system, causing an instantaneous change in state.Subsequent to landing, the system configuration alsochanges.
379

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-10, NO. 7, JULY 1980
(b) (a)
Fig. 9. One foot support.
In order to compute the instantaneous change in thestate, one has to reconsider the system of Case 1 (Fig.7(b)) with F1 and G, left in the system equations as inputs.Thus, U now contains gravity, u2,U3,F1, and GI.
Let Fli and Gli be the amplitudes of the impulsiveforces. From (9) one computes the impulsive componentsof F1 at the time of landing. If (A1)-(A9) are integrated
X(t + ) - X(t - ) =f' (13)
where f' is thg result of integration of impulsive compo-
nents in U, i.e., Fli and Gli as well in Fl. Since f' andX(t -) are known
X(t+)=X(t-)+f'=f[o[Fli, Glj. (14)
The condition that the vertical and horizontal velocities ofpoint A at t + are zero allows one to compute Fli and GI,(see [11]).Once the magnitudes are known, they are inserted in
(14) to derive X(t +). The system now has the initial stateX(t +) and is governed by (Al)-(A9) with six constraints:(9) plus
xl - k1 sin1- XL =O
Y1-klcosol-YL =0 (15)where XL and YL are the coordinates of the point oflanding. This results in the feedback configuration of Fig.9(b), where
rF=F1(X, U)
Fl=F1(X,U) (16)
GI = G1(X, U).
At this time, F1 and G1 are forces of constraint, and U isgravity plus hip torques.
Case 4-One Leg Landing and Sliding
In this case, only the vertical velocity of the foot be-comes zero instantaneously. The horizontal velocity ofpoint A depends on the friction coefficient F between thepoint foot and the ground. A vertical impulsive force G1,acts on the system. In turn, this force generates a horizon-tal impulsive force of ,tG1i. The fact that the verticalcomponent of velocity is zero is used to compute theamplitude of Gli. Now one proceeds with the computationof the state (14). From the computed X(t+), the systemdetermines whether point A is stationary or sliding. If Acontinues to have horizontal motion, only a reaction forceG1 becomes active (plus a horizontal friction force IiG,).
(b)Fig. 10. Collision with a wall.
F E
Fig. 11. Initiation of walk.
The corresponding constraint is
Y1- k1 cos9l=0. (17)The horizontal force acting at A is all friction and not
due to constraints. If point A becomes immobilized in x
as well, we have Case 3.
Case 5 Landing on Both Feet
Points A and D touch the ground simultaneously atarbitrary locations-even at different elevations. Both feetmay land in potholes. One foot may land in a pothole.Both may become immobilized horizontally due to fric-tion, or only one may be immobilized horizontally. Theapproach is similar to Cases 3 and 4 for arriving at a new
state and determining which constraint forces are active.
Case 6-Collision with a Wall (Fig. IO)
At the point and time of contact, the state is known andthe horizontal velocity of point E becomes zero. Thecomputation of the impulsive forces, the new state, andlater the constraint forces are similar to landing on theground. The main difference is that in landing and walk-ing one may anticipate the impact and modify the stateand the input accordingly while in collision such a prioriinformation and adaptation may not be available.
Case 7-Initiation of Walk
Suppose both feet are stationary and on the ground. Toinitiate walk, one must apply inputs to lift point D, for
example (Fig. 11). This means torques must be appliedsuch that G4 goes to zero, thereby defeating and nullifyingthe constraint. A good physiologically based discussion is
provided in [21]. Once the foot is free, it may be movedunder control. This issue is further discussed from a
y
F E
B
A D
x
L
(a)
u ix
380

381HEMAMI: MODEL OF BIPED DYNAMICS
control point of view in [12] where the reduction of G4 isachieved by controlling the system, and the resultingmotion is simulated. It may be instructive to comparethese simulation results of [12] with experimental measure-ments on humans [22, Fig. 2].
possible to write parametric equations for Z in terms ofW:
Z=Z(W). (21)The special case of (21) is when W is a subset of Z ((28)below). Differentiating Z twice, one obtains
Z= azwawIV. PROJECTION(22)
While for control purposes the original dimensionalityof the system must be maintained at all times, for avariety of reasons it may be desirable to project the modelonto a smaller dimensional space.
1) Some constraints, such as the connection con-straints, are not violated; and one wishes toeliminate these forces of constraint and reduce thedimensionality of the system.
2) One may wish to project the system onto lowerdimensional systems whose dynamic equations ofmotion are already available. This is desirable forchecking for human error in deriving the largerdimensional models.
The mechanism of this projection is very briefly dis-cussed here. Suppose the constrained system is describedby state space equations:
Z=Z
I(z)z=f(Z,Z)+f2(Z,Z)U+f3(Z)r (18)where Z and r are, respectively, vectors of dimension nand r. As an example, the nine equations in the Appendixdescribe (18).The constraints and the forces of constraint are
C(Z) = 0
r=Fr(z,, u). (19)It is shown [12] that
acTA z~ (20)
_ac acr
aT azi aziaCTazz ac aCr
aZn aZn
One method of elimination of the forces of constraint ris to multiply both sides of (18) by vectors that areorthogonal to column of f3(Z). Since f3 has rank r (corre-sponding to r independent constraints) there are n-r suchorthogonal vectors. The main difficulty with such elimina-tion is that the state space remains of dimension n.An alternative method, if possible, is to solve C(Z) = 0
for r variables in terms of n-r remaining variables and usesubstitution to eliminate r (see example below). The lattermethod may be generalized and refined as follows.Suppose a new basis W is selected in the (n-r) dimen-
sional space of the constrained system and that it is
(23)
If (23) is substituted in (18) and use is made of (20) and(21), one obtains
(Z) a__CTF(4I(Z) awW=f4(W,W)+f5(W,W)U+ az F (24)aZT
premultiplying both sides of (24) by a , and computingW, one obtains
W=(aZTwIaz) [f6+f7U+ awT CF]. (25)
It is easy to show that
aZT aCTaw____=z0.waz (26)
Therefore, (25) does not contain F and hence with W= Wconstitutes the state equations of the reduced system.The computation of (26) is carried out below for a
simple example. Suppose in Fig. 3, point A is at the originof the coordinate system and is fixed, and suppose pointD is free. Let the objective be to eliminate the forces ofconstraint F1 and G,. The constraints are
C =Xi- k sin l = 0
C2=Yl-kIcos91 =0. (27)
Let W= (x2,x3,y2,y3, l192, and 93)T. Equation (21) be-comes
X = k sin0lY= k cos91X2 =X2Y2 =Y2X3 = X3
Y3 =Y3
0a3 = 0a3' (28)
From the above equation one derives00
aZT 0aw k, cosO
0L 0
0000
-k,sinO,00
000000
0
01
0000
0
0010000
0001000
0000
00
00000
0
0000.001
(29)

IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS, VOL. SMC-10, NO. 7, JULY 1980
From the constraint equations:
aCTaz
100000
- k1 cos9100
01
000
k1 sin 9l00
It is obvious that (26) holds.
V. ESTIMATION OF INPUTS
One application of the present model is in estimation ofinputs U when state X and F are available:
r=F(X, U). (30)
Equation (30) is linear in the inputs U, and therefore itcan be solved for some components of inputs U in termsof other components of U and X. Specifically, suppose theinputs are reduced to a smaller set such that there are asmany inputs as measured forces of constraint. Then (30)may be uniquely solved for
U= U(F,X). (31)
This approach is applicable to the problem of indirectestimation of torques at human joints, because directmeasurement of these torques is nearly impossible. Forceplates have been developed [22], [23] that measure the sixcomponents of forces of constraint IF under the feet innormal three-dimensional locomotion. By goniometer andremote sensing mechanisms [22], [23], angles of the mainsegments of the body and angular rates of the samesegments with respect to time are measured. Therefore Xis available. Finally, the muscular forces may be com-bined into a smaller number of torques acting at thejoints. Suppose the latter reduction results in six torques.By solution of (31) these six torques may be computed.
In the sagittal plane, with both feet on the ground, fourforces of constraint are available. A ten dimensionalmodel of the human body (two shanks, two thighs, andtorso) may be utilized for measurements, and the forcesand the state provide four relations among the six torques(two at the ankles, two at the knees, and two at the hips).
In case one would not like to reduce the inputs to sixtorques, the measurement of F and some reasonably di-mensioned X for a human body establishes six linearrelations among the inputs (muscle forces). These rela-tions could complement or be used as a check on EMGmeasurements [24], [25].
It is worth mentioning that since (31) is very general, itis valid both in static cases where the body is stationaryand in dynamic cases, e.g., walking, when X, F, and U arefunctions of time. Also this computation does not need
accelerations-the second derivatives of the measuredpositions (angles) with respect to time. Therefore, theestimates are less susceptible to noise and error.
VI. CONCLUSION
A model of biped dynamics has been proposed thatencompasses the totality of movements and allows a vari-able structure skeleton. The original dimensionality of thesystem is maintained. Four classes of constraint connec-tion, locking, reaction, and collision are considered un-der a unified theory: 1) the imposition of a constraintwhether deliberate or not is analogous to closing a feed-back loop, and the violation of it is analogous to severinga feedback connection; 2) all these forces of constraint arefunctions of the state and input; and 3) the model allowscomputation of the transition in the state from one con-strained configuration to another.As part of the verification of the model, a general
projection method was discussed that enables one to pro-ject a larger dimensional constrained system into its con-strained subspace. A somewhat difficult problem is that anatural basis for the subspace may not always exist or beapparent.A mechanism was described that allows estimation of
up to six torques acting on human joints without measur-ing or computing accelerations. With the choice of areasonably dimensioned state and with synchronous re-cording of both the state and the six ground reactionforces the joint torques may be computed in real time.Alternatively the measurement of reaction forces providesup to six relations among the state and inputs (muscularforces).With this model a computer or a brain may be made
conscious of coordinates of any arbitrary point of thesystem. It was also pointed out that with this model, it ispossible to relegate the motion of a joint to some actua-tors (muscles), while the maintaining of the locking of thejoint may be relegated to other actuators, allowing thefirst group to rest while the lock is in effect.
Finally, it is worth mentioning here that the foot has atleast a two-point support (heel-toe) structure whose mo-tion is also describable by the models of this paper andwhose control by shifting the weight from the heel to thetoe and vice versa is very important in locomotion.
APPENDIX
The equations of motion for the three-link biped modelbelow are derived in this Appendix. The torso is shown inFig. 4. The total forces acting on the torso are connectionforces F2, G2, F3, G3 where legs connect, F5 and G5 forshoulder collision with a wall, and F6 and G6 for a lockedhip joint. Two hip torques, u2 and U3, act on the torso.D'Alembert's equations of motion for the torso are
m2X2 = F2- F3- F5+ F6
m2y2 = G2- G3 + G5 + G6-m2g(Al)(A2)
382

383HEMAMI: MODEL OF BIPED DYNAMICS
2°2= u2- u3- F2(k2COS92- d2sin 02)+ F3(k2COS92+ d2sin02)- F5[(12- k2)cos92- d2sin02]- F6[k2cos92-(d2+ e) sin02]+ G2(k2sin92+ d2 COS92) + G3(d2cos 2- k2sin02)- G5[(12- k2)sin92+ d2sin92]+ G6[k2sin92+ (d2+ e)cos02]. (A3)
The right leg is shown in Fig. 5. On this leg, connectionforces (F2 and G2), ground reaction forces (Fl and GI),and locking forces (F6 and G6), as well as torque u2, areactive. The equations of motion are
mi. = F, -F -F (A4)
mj.Yj= GI -G2-G6-MI9 (A5)I 1 U=-u2-F1k1Cos1-F2(11-kl) cos91
-F6(11-k1-e) cos9l + Glkl sinO1
+ G2(11- kl) sin91 + G6(11- k- e) sin91. (A6)The left leg is shown in Fig. 6. It is assumed that this leg
cannot be locked at the hip. The equations of motion forthis leg are
m j =FF-F4 (A7)
m3 ~3 = G3-G4-M39g(A8)
I393 = F3(13- k3) sin93 + F4k3 sin03- G3(13- k3) cos9 3- k3G4cosO3 + u3. (A9)
ACKNOWLEDGMENT
The author is grateful to Professor H. C. Ko, Chairmanof the Department of Electrical Engineering at Ohio StateUniversity, for his support and encouragement of thiswork.
REFERENCES
[1] M. Vukobratovic, Legged Locomotion Robots and AnthropomorphicMechanisms. Beograd: Mihailo Pupin Institute, 1975.
[2] S. Grillner, "Some aspects on the descending control of the spinalcircuits generating locomotor movements," in Neural Control ofLocomotion, Herman, Grillner, Stein, Stuart, Eds. New York:Plenum, 1976, pp. 351-375.
[3] M. Milner, J. V. Basmajian, and A. 0. Quanbury, "Multifactorialanalysis of walking by electromyography and computer," Amer. J.Phys. Med., vol. 50, pp. 235-258, 1971.
[4] H. Hatze, "A complete set of control equations for the human
musculoskeletal system," J. Biomechanics, vol. 10, pp. 799-805,1977.
[5] C. L. Golliday, Jr., "Toward development of biped locomotioncontrols: planar motion control of the kneeless biped standing andwalking gaits," Ph.D. dissertation, Ohio State University, Col-umbus, June 1975.
[6] H. H. Kornhuber, "Cerebral cortex, cerebellum and basal ganglia:an introduction to their motor function," in The Neurosciences,Third Study Program. Schmitt and Worden, Eds. Cambridge:M.I.T., 1974, pp. 267-280.
[7] J. B. Morrison, "The mechanics of muscle function in locomo-tion," J. Biomechanics, vol. 3, pp. 431-451, 1970.
[8] L. M. Nashner, "Vestibular and reflex control of normal stand-ing," in Advances in Behavioral Biology, Vol. 7, Control of Postureand Locomotion, R. B. Stein, K. G. Pearson, R. S. Smith, and J. B.Redford, Eds. New York: Plenum, pp. 291-308, 1973.
[9] D. P. O'Leary, J. P. Segundo, and J. J. Vidal, "Perturbation effectson stability of gravity receptors," Biological Cybern., vol. 17, pp.99-108, 1975.
[101 H. Hemami, V. G. Jaswa, and R. B. McGhee, "Some alternativeformulations of manipulator dynamics for computer simulationstudies," in Proc. of 13th Allerton Conf. Circuit and System Theory,University of Illinois, Oct. 1975, pp. 124-140.
[11] H. Hemami, and R. L. Farnsworth, "Postural and gait stability ofa planar five link biped by simulation," IEEE Trans. Autom.Contr., vol. AC-22, no. 3, pp. 452-458, June 1977.
[12] H. Hemami, and B. Wyman, "Modeling and control of con-strained dynamic systems with application to biped locomotion inthe frontal plane," IEEE Trans. Autom. Contr., vol. AC-24, no. 4,pp. 526-535, Aug. 1979.
[13] , "Indirect control of the forces of constraint in dynamicsystems," J. Dynamic Syst., Measurement and Contr., vol. 101, no.4, pp. 355-360, Dec. 1979.
[14] H. Hemami and F. C. Weimer, "Modelling of nonholonomicdynamic systems with applications," submitted to J. Appl. Mech.,Aug. 1978.
[15] A. Z. Ceranowicz, "Planar biped dynamics and control," Ph.D.dissertation, Ohio State University, Columbus, Aug. 1979.
[16] B. Khosravi-Sichani, "Preliminary studies on a two segment artifi-cial foot by simulation," M.S. thesis, Ohio State University, Aug.1979.
[17] C. Rosse and D. K. Clawson, Introduction to MusculoskeletalSystem. New York: Harper and Row, 1970, p. 104.
[18] J. B. Morrison, "The mechanics of the knee joint in relation tonormal walking," J. Biomechanics vol. 3, pp. 51-61, 1970.
[19] J. V. Basmajian, and R. Tuttle, "EMG of locomotion in gorilla andman," in Control of Posture and Locomotion, R. B. Stein et al., Eds.New York: Plenum, 1973, pp. 599-609.
[20] J. Perry, "Kinesiology of lower extremity bracing," Clinical Ortho-paedics, vol. 102, pp. 18-31, July-Aug. 1974.
[211 T. Cook, and B. Cozzens, "The initiation of gait," in NeuralControl of Locomotion, Herman, Grillner, Stein, Stuart, Eds. NewYork: Plenum, 1976, pp. 65-76.
[22] R. Herman, T. Cook, B. Cozzens, and W. Freeman, "Control ofpostural reaction in man: The initiation of gait," in Control ofPosture and Locomotion, R. B. Stein et al., Eds. New York:Plenum, 1973, pp. 363-388.
[23] J. Paul, "Magnitude of forces transmitted at hip and knee joints,"in Lubrication and Wear in Joints, V. Wright Ed., Philadelphia:Lippincott, 1969, ch. 9, pp. 77-87.
[24] J. Perry et al., "Electromyography as a force measurement" FinalRep., NIH Grant Am- 13466, 1974.
[25] A Seireg and R. J. Arvikar, "A mathematical model for evaluationof forces in lower extremities of the musculo-skeletal system," J.Biomechanics, vol. 6, pp. 313-326, 1973.