Embed Size (px)
Citation preview

A Global Kalman Filtered CMORPH using TRMM to Blend Satellite Rainfall
Robert Joyce NOAA/NCEP/CPC Wyle Information Systems
Pingping Xie NOAA/NCEP/CPC
John Janowiak University of Maryland
NASA GSFC 16 Apr , 2009, Greenbelt MD

1. Current CMORPH processing algorithm
2. Regional Kalman filter CMORPH using radar rainfall to evaluate/weight satellite rainfall components
3. Rain rate damping in Kalman filtered CMORPH
4. Global Kalman filter CMORPH using withheld TRMM TMI to evaluate/weight satellite rainfall components
5. Conclusions and Future plans
Outline


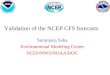
Propagated forward
t = 0 t + 0.5 hr t + 1hr t + 1.5 hr
0330 GMT 0400 GMT 0430 GMT 0500 GMT
t = 0 t + 0.5 hr t + 1 hr t + 1.5 hr
0330 GMT 0400 GMT 0430 GMT 0500 GMT
Propagated backward
a
b
Observed
c 0330 GMT 0400 GMT 0430 GMT 0500 GMT
0.67 0.33
0.670.33
Time InterpolationWeights
Propagated & “Morphed”
The microwave precip. features are propagated forward and backward in time.
Then the features are “morphed” by linearly interpolating in time as depicted in panel “c”
each grid value for the 0400 & 0430 GMT images is obtained by:
P0400= 0.67 x P0330 + 0.33 x P0500
P0430= 0.33 x P0330 + 0.67 x P0500

1. Current CMORPH processing algorithm
2. Regional Kalman filter CMORPH using radar rainfall to evaluate/weight satellite rainfall components
3. Rain rate damping in Kalman filtered CMORPH
4. Global Kalman filter CMORPH using withheld TRMM TMI to evaluate/weight satellite rainfall components
5. Conclusions and Future plans
Outline

• Correlation of 0.25 degree lat/lon propagated PMW rainfall w/ Stage II radar rainfall
•

σ2z2 σ2
z1
Y = ___________ z1 +
_________ z2
σ2z1 + σ2
z2 σ2z1 + σ2
z2
KALMAN FILTER example with inverse error weighting
Where: Y = new estimate z1 = estimate from previous scan
z2= estimate from future scan
* σ2 = error variance for z1 & z2
* Alternatively, could use correlation coef. or explained variance







1. Current CMORPH processing algorithm
2. Regional Kalman filter CMORPH using radar rainfall to evaluate/weight satellite rainfall components
3. Rain rate damping in Kalman filtered CMORPH
4. Global Kalman filter CMORPH using withheld TRMM TMI to evaluate/weight satellite rainfall components
5. Conclusions and Future plans
Outline

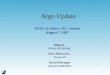
• IPWG U.S. daily 0.25 degree rainfall validation
Kalman filter CMORPH
no PDF adjustment
Kalman filter
CMORPH PDF adjusted
NEXRAD Stage II
radar rainfall

•Cumulative rain rate distribution of Kalman filtered rainfall, PDF adjusted Kalman filtered, and radar rainfall.


1. Current CMORPH processing algorithm
2. Regional Kalman filter CMORPH using radar rainfall to evaluate/weight satellite rainfall components
3. Rain rate damping in Kalman filtered CMORPH
4. Global Kalman filter CMORPH using withheld TRMM TMI to evaluate/weight satellite rainfall components
5. Conclusions and Future plans
Outline

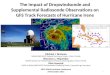
Correlation of PMW Precip from most recent scan with TMI precip.
Simultaneous (within 30 min.)
30 min.
60 min.
90 min.
120 min.
backwardforward

Simultaneous (within 30 min.)
30 min.
60 min.
90 min.
120 min.
backwardforward
Similar to previous, but Correlation Difference: TMI & (SSMI/AMSRE)– TMI & IRFREQ

Correlation of forward in time propagated AMSU rainfall with TMI ( left panels). Differences between forward propagated HQ PMW and AMSU rainfall with TRMM TMI (right panels)





1. For convective-dominated rainfall regimes, the inclusion of the IR derived estimates in the regional Kalman filtering process in substantially improves the combined satellite rainfall product, most substantial contributions are in largest gaps between PMW scans.
2. Use of instantaneous rain rate PDFs eliminate the rain rate damping and increase of spatial coverage created by the filtering process.
3. Surface type and latitude region provide substantial variability in the statistical nature of propagated PMW rainfall and IR-based rainfall estimates relative to TRMM TMI.
4. Continue the Kalman filter study for use with TRMM TMI (GPM in the future) for regional/seasonal depiction of skill/error variance of each sensor/algorithm. Need to look at the sensor type weighting variability as a function of season.
Conclusions and Future Work