Embed Size (px)
Citation preview

A New Algorithm for Calibration of Radar Biases Based on ADS-B
1Wuzhenya,2Huangzhujian,3Hujun,4Yangchangqi 1,4College of Computer Science, Sichuan University, Chengdu, 610065,
China,[email protected] 2Chengdu Aeronautic Vocational and Technical College,Chengdu,610065,China
*3 Department of Computer, Chengdu Normal University, Chengdu, 610065, China,
Abstract For the low precision of single radar surveillance, a novel algorithm for calibration of radar
biases based on Kalman filter is proposed. The algorithm is mainly based on the theory of radar bias model, and mixes the difference between the ADS-B data with high precision and radar data with low precision, then uses the Kalman filter to estimate the radar difference value and conduct real-time calibration on radar. Finally, simulation experiment is done with Actual data. Results show that the technology can effectively estimate the measurement bias of single radar at real time, and the measuring range precision of the radar can be tens of meters.
Keywords: ADS-B, Radar Biases, Real Time Calibration, Kalman Filter
1. Introduction
In China’s modern air traffic surveillance and command system, the surveillance information, with
higher precision and broader covering area than single sensor, is gained through mixed processing on
multi-sensor surveillance data[1-8]. In recent years, as the ADS-B, Automatic Dependent
Surveillance-Broadcast, has been gradually applied both in China and in foreign countries, precision of
the surveillance data in these areas has been greatly improved. However, because of the expensive
ADS-B airborne equipment, the difficulty to re-equip, and other reasons, the ADS-B airborne
equipment hasn’t been allocated on most China’s civil airplanes. Therefore, to effectively use the
highly-precise ADS-B data in real-time calibration on the single radar bias on ground, can substantially
improve the single radar’s surveillance precision on some airplanes unable to provide ADS-B data.
In the existing multi-sensor surveillance data processing theories, large numbers of studies ar
e about the bias calibration among sensors of the same type. Documents [20-21]introcuces mul
ti-sensor registration algorithm. Documents [13-14]introduce several novel real-time optimizing
methods on radar biases. They tell us how to conduct optimized real-time estimation on biases
among other radars by using data from radars with high precision and how to calibrate radars;
Document[15]introduces how to calibrate the biases among different kinds of sensors on the g
round of the airport; Document[16]introduces bias calibration on non-synchronous radar data in
the multi-radar network;Document[17]introduces how to calibrate biases on radars with GPS d
ata, how to compare data from three sensors with different precision on the same target, and
how to calibrate biases of radars; Document[18]introduces how to mix the ADS-B data with th
e radar data on the same target for algorithm; Document[19]introduces the mixed real-time esti
mation on biases of different kinds of sensor systems on the same target. This estimation meth
od can make use of the advantages of different kinds of sensors.
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
International Journal of Advancements in Computing Technology(IJACT) Volume4, Number20,November 2012 doi: 10.4156/ijact.vol4.issue20.32
266

The paper, based on the radar bias analysis model, presents the algorithm to calibration on
biases of single radar in the ADS-B data group on different targets, and analyses the biases an
d reasons for these biases. Meanwhile, simulation experiments are done to test the effectivenes
s of the algorithm.
2. Algorithm to calibration on biases based on kalman filter
The number of aircrafts with ADS-B equipment that can be traced by ground radar A is L, and the
L+1 aircraft isn’t equipped with ADS-B equipment. Assuming location of the radar is the origin of
coordinates, the radar system bias and random bias are considered while the responder bias is neglected,
the radar bias model [20] can be described as:
1 0
0 0 1m
m
nK
n
(1)
Here, ρm and φm represent the measured value of the aircraft at certain moment, ρ and φ represent
the real value of the aircraft at the moment, K is the gain of range bias (Easy for algorithm, the
coefficient can be regarded as a constant value at certain moment.), Δρ and Δφ represent the radar
system bias, nρ and nφ respectively represent the slope range and the angular measured noise.
As the Kalman filter and other linear estimation methods require linear equation, Equation (1) is
transformed into the Cartesian coordinate as follows:
2 2 2 2
2 2 2 2
-H sin [(1 ) ] -H sin( )
-H cos [(1 ) ] -H cos( )
x K n n
y K n n
(2)
Take the transforming equation as:
, ((1 ) , )x yF K n n (3)
The transforming equation can be linearized as:
,
, , , , ,,
((1 ) , )
( , )
x y R
x y x y x y x y x yx y
F K R R n n
f f f f fF K n n
K n n
(4)
The ADS-B bias model [17] can be set up as:
ads obs ads true ads adsX X H X (5)
Where, adsads obs
ads
X
Then, Equation (5) can be:
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
267

cos sin( )
sin cos( )
ads b ads
ads b ads
x n
y n
(6)
The polar coordinate can be transformed into Cartesian coordinate as:
ads x
ads y
sin cosx =F ( + ( ) sin ( ) - x+ y)
sin cosy =F ( + ( ) sin ( ) - x+ y)
ads ads ads ads
ads ads ads ads
n y n
n y n
cos x ,
cos x ,
(7)
Based on Equation (4) and Equation (7), the bias observation model at t is:
1 11
, ,1 1 1
( ) ( )( )..
( ) ( ) ( )( ) ( ( ), ( )) f
( ) ( ). .( ) ( ) ( )
ads b
i i ads bix yi i i x yads bi
ads b
ii ads bi
x t x tx t
x t x t x tt F t t
y t y t y
y t y t y t
(8)
Where, {i|i=1, …, L}.
If the ADS-B bias is neglected, i.e., Δxads=0, and Δyads=0, the equation can be simplified as:
, , , , ,
( )
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
x yi x yi x yi x yi x yiR
i i
t
f f f f fK t t t n t n t
K t t t n t n t
H X Qn
(9)
Where ,
1 1 1
1 1 1
( ) ( ) ( )
... ... ...
( ) ( ) ( )
( ) ( ) ( )
... ... ...
( ) ( ) ( )
x x x
xL xL xL
y y y
yL yL yL
f f f
K t t t
f f f
K t t tH
f f f
K t t t
f f f
K t t t
and K
X
Assuming
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
268

2 2iD = ((1+K) ) -H
cos( )
sin( )
i i i
xi i i i i ri
yi i i i i ri
n
f D n X
f D n Y
(10)
For Equation (9), the following equation is approximately established.
i= cosxif
i=sinyif
icosxii
fD
K
isinyi
i
fD
K
isinxii
fD
icosyi
i
fD
Assuming the observation equation as:
( ) ( ) ( )radar nk H X k H n k (11)
Without other priori information, the state equation of the system can be assumed as:
( ( ) ( ) ( )X k X k m k k+1) (12)
Where Φ(k) is a 3×3 unit matrix.
Based on the state equation and the observation equation, we can get the linear prediction
recursion formula[21]:
ˆ ˆ( ( ) ( | 1) ( ) ( )X k X k k k k k+1| k) (13)
The mean-square bias should be the minimum in order to get the optimized estimated value, i.e.,
the minimum value should be got in Equation (14):
2ˆ( ) [( ( ) ( )) ]P k E X k x k (14)
After solving Equation (14), the optimized estimated value[22] can be deduced:
( ) ( 1) ( )[ ( ) ( 1)]X k X k K k k H X k (15)
Where, the filter gain is:
1 1( ) ( ) [ ( ) ( )]T T TK k P k H HP k H R k (16)
1( ) ( 1) ( 1)TP k P k Q k (17)
R and Q in Equation (16) and (17) are the covariance matrix on the observed noise and the
system noise respectively.
3. Data simulation
The simulation experiment is conducted in order to test the performance of the equations above.
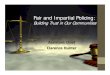
Assuming radar A is located in the origin, L is the 10 aircrafts with ADS-B airborne equipment, L
aircrafts are flying at a constant speed in different tracks at the same height (as seen in Figure 1), the
data refreshing cycle is 4s, the measuring noise is Gaussian noise, the already-known single radar range
measurement system bias ΔR=2000m, and the angular measuring system bias Δθ=1°. The Kalman
filtering method is used for analog data simulation, and the mean-square root bias of the radar range
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
269

and the angular measurement are respectively calculated after 100 times of Monte Carlo simulation.
Figure 1. Schematic diagram for simulated data flight trajectory (L=10,H=10000m)
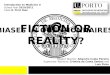
(a) Mean-square root bias of range
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
270

(b) Mean-square root bias of angle
Figure 2. Bias performance analysis
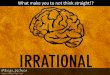
(a) K
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
271

(b)ΔR
(c)Δθ
Figure 3. Bias calibration value
In Figure 2, ADS-B data from L aircrafts (L=10) is calibrated, the range (a) and the angle (b) are
the mean-square root bias. Figure 3 shows the values of ΔR, Δθ and K in simulation. From the figures,
it can be seen that real-time biases in range measurement and angular measurement of single radar can
be gained by using the algorithm, and the single radar bias can be calibrated at real time. Through bias
compensation, the radar range measurement bias reduces from 2000 meters to 100 meters, and the
angular measurement bias reduces from 1 degree to 0.0004 degree. What’s more, as time passes by, the
mean-square root for range measurement increases from 90 meters to 40 meters, and the mean-square
root for angular measurement increases from 0.0004 to 0.0002. Difference between the estimated value
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
272

and the real value of the range bias and the angular bias by using Kalman filtering method becomes
smaller and smaller. At last, it comes to a stable optimized estimated value. Based on the above
simulated analysis, the presented algorithm is effective to some extent, as it can conduct real-time
calibration on single radar bias, raise the precision of range and angular measurement, and improve the
surveillance precision of the single radar system.
4. Conclusion
In this paper, a dynamic algorithm to calibration of radar biases based on Kalman filter is
provided by using the available ADS-B surveillance data, and real-time calibration is conducted on the
system biases of single radar on ground, then surveillance positioning precision of aircrafts without
ADS-B airborne equipment in the air route is improved. Simulation experiment proves that the
algorithm can effectively estimate the system biases of the range and angular measurement on single
radar, which has great engineering application value in the air traffic control and command practice. As
the real-time nature of the aircraft surveillance positioning should be considered in real air traffic
control and command, the efficiency for the algorithm should be further improved to ensure the
real-time nature of the calibrated result.
5. Acknowledgement
This work is supported by National Science Foundation of China (No.61071162) and science and
technology research project of civil aviation of China (MHRDZ200815).
6.References [1] Waltz, Eand Llinas J., Multisensor data fusion, Artech House,USA,1990
[2] BarShalom,Y., Multitarget-multisensor tracking:advanced applications, Artech House,USA,1990
[3] Yukun Chen, Xicai Si, Zhigang Li," Research on Kalman-filter based multisensor data fusion",
Systems Engineering and Electronics, vol.18, no. 3,pp.497-502, 2007.
[4] Wu Ling,Lu Faxing,"Research on the algorithms for registration in sensor network for target
tracking", International journal of distributed sensor networks, vol.5,no.1,pp. 41-47, 2009.
[5] Farina, Studer F., Radar data processing, Reserch studies Press, USA,1989
[6] Pan JiangHuai, He JiaZhou," On-line absolute sensor registration in 3-D radars networking", Cross
Strait Quad-Regional Radio Science and Wireless Technology Conference, pp.1085-1089, 2011.
[7] Li Da, Zhang Fan,"Real-time data compression bias estimation on netted radar", International
Conferece on Signal Processing (ICSP), pp.2152-2155,2010.
[8] Song Qiang, Xiong Wei, He You,"A track alignment-correlation algorithm with systematic errors in
radar network", Radar Conference,pp.1-4, 2009.
[9] Valovage E.," Enhanced ADS-B research", International journal of Aerospace and Electronic
Systems Magazine, vol.22,no.5,pp. 35-38,2007.
[10] Lin Xi, Zhang Jun, Zhu Yanbo, Liu Wei,"Surveillance accuracy analysis of ADS-B supporting the
separation service in western China", Integrated Communications, Navigation and Surveillance
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
273

Conference, pp.1-6, 2009.
[11] Ye Hong, YANG Zhan-ping,LI Jun, LI Shi-ling, "A Survey of Filtering Theory Based
Multi-sensor Registration Algorithm", International Journal of Advancements in Computing
Technology, Vol. 4, No. 5, pp. 318 - 328, 2012.
[12] Peiyi Zhu, Qiang Zhong, Weili Xiong, Baoguo Xu, "A Robust Least Squares for Information
Estimation Fusion", JDCTA, Vol. 5, No. 4, pp. 65 -73, 2011.
[13] Besada P., Garcla J. , Miguel G.," New approach to online optimal estimation of multisensor
biases", IEE Proceedings-Radar Sonar and navigation,pp. 31-40, 2004.
[14] Bo Wang, Canlin Li,Dong Li," A real-time alignment algorithm based on Kalman filter", Journal
of University of Electronic Science and Technology of China, vol. 36,no.5,pp. 872-875, 2007.
[15] Besada J., Garcia J., Soto A., Carmen M.,"On-line sensor calibration for airport data fusion",
Proceedings of the IEEE 2004 radar conference, pp.175-180, 2004.
[16] Rafati A., Moshiri B., Rezaei J.," A new algorithm for general asynchronous sensor bias estimation
in multisensor-multitarget systems",10th conference of the international society of information
fusion, pp.1688-1695,2007.
[17] Besada J., Garcla J., Miguel G., "Radar bias correction based on GPS measurement for ATC
applications", IEE Proceedings-Radar, Sonar and Navigation, pp.137-144, 2002.
[18] Silva D., J.L.R., Brancalion, J.F.B, Fernandes D.," Data fusion techniques applied to scenarios
including ADS-B and radar sensors for air traffic control”, Information Fusion, FUSION '09. 12th
International Conference,pp.1481-1488, 2009.
[19] Qiang Song, You He, Wei Xiong," New Fusion Estimation Algorithm for Systematic Errors of
Multiple Dissimiar Sensors", Journal of Southwest JiaoTong University, vol.46,no.4,pp.
681-687,2011.
[20] ARTON D., Moden radar system analysis,Artech House, USA,1988
[21] Wanhai Yang, Multi-sensor data fusion and application , XiDian University Press , China,2004
A New Algorithm for Calibration of Radar Biases Based on ADS-B Wuzhenya,Huangzhujian,Hujun,Yangchangqi
274