Embed Size (px)
Citation preview

Contents lists available at ScienceDirect
Signal Processing
Signal Processing 91 (2011) 1054–1059
0165-16
doi:10.1
n Corr
E-m
fhongqi
journal homepage: www.elsevier.com/locate/sigpro
Fast communication
A novel maneuver detector based on back propagationneural network
Yilong Zhu n, Hongqi Fan, Zaiqi Lu
ATR Key Laboratory, National University of Defense Technology, Changsha, Hunan 410073, PR China
a r t i c l e i n f o
Article history:
Received 30 May 2010
Received in revised form
4 August 2010
Accepted 17 September 2010Available online 25 September 2010
Keywords:
Maneuver detection
High resolution Doppler profile
Pattern classification
Detection delay
ROC curve
84/$ - see front matter Crown Copyright & 2
016/j.sigpro.2010.09.015
esponding author.
ail addresses: [email protected] (Y. Zh
@gmail.com (H. Fan), [email protected]
a b s t r a c t
Target maneuvering is always accompanied with rapid attitude variations, which are
helpful to achieve high cross-range resolution for coherent pulse radar. In this paper, the
high resolution Doppler profile (HRDP) is first formulated. The principle of maneuver
detection using HRDP is then fully exploited. The difference of target attitude rates
between nonmaneuvering and maneuvering motion mode is analyzed. Due to the
nonstationarity of HRDP, the maneuver detection problem is reformulated as a pattern
classification problem, where nonmaneuvering and maneuvering motion mode are
distinguished. A novel detector is then developed based on the back propagation neural
network. Two novel indices for performance evaluation are proposed. They reflect the
dynamic performance of the maneuver detector more reasonably than the classical
index, average detection delay. Finally, the simulation results show that the proposed
detector possesses low detection delay and high detection probability.
Crown Copyright & 2010 Published by Elsevier B.V. All rights reserved.
1. Introduction
Maneuvering target tracking (MTT) is one of the mostimportant issues in the target tracking community. As targetacceleration cannot be measured directly by any existingsensor, MTT is usually regarded as a hybrid estimationproblem [1,2]. Many algorithms have been developed todeal with target motion uncertainty. Decision-based single-model (SM) method [1] and multiple-model (MM) method[2,3] are the most important two classes so far. Although theMM method is popular for its excellent quality andreliability, the implementation is complicated and requireslarge amount of computation. In some applications, such asguidance, navigation, etc., decision-based SM method ismuch more appealing, say, due to limited computationalcapability. Recent researches have shown that it can obtaincomparable tracking accuracy with that of the MM method
010 Published by Elsevier
u),
(Z. Lu).
with a timely maneuver detector. Therefore, rapid androbust maneuver detection turns out to be crucial to themethod [1,4].
There exist three main maneuver detection techniquesaccording to the information employed by the detector,i.e., innovation-based [4], image-based [5], and feature-based [6,7]. Ref. [4] presents six traditional and twonovel maneuver detection algorithms. They are allinnovation-based, where test statistics are developedusing the innovation. These methods are quite slow andtypically require a few seconds to detect a maneuver. Theimage-based technique attempts to identify the variationin the target’s attitude angle by monitoring its opticalimages [5]. It is fast but requires large amounts of imageprocessing. Moreover, the optical sensor is susceptible toclimate effects, and is only suitable for medium to shortrange scenarios. Compared with these two techniques, thefeature-based technique is fast response and morereliable. Radar glint noise [6] and range-Doppler images[7] are the two main features which have been used todetect target maneuver. In fact, radar target featureretains strong link with target motion mode. Several
B.V. All rights reserved.

Y. Zhu et al. / Signal Processing 91 (2011) 1054–1059 1055
type features, e.g., high resolution range profile [8], radarcross section (RCS) [9], etc., have been used to aid dataassociation in MTT where multiple targets are involved.This paper proposed a novel feature-based maneuverdetector using the high resolution Doppler profile (HRDP).
The rest of the paper is organized as follows. Section 2formulates the HRDP. Maneuver detection principle,detector design, and its performance evaluation arediscussed in Section 3. Section 4 presents the simulationexperiments, and conclusions are drawn in Section 5.
2. High resolution Doppler profile
For simplicity, we only analyze the two-dimensionalsituation. The geometry of radar and target is shown inFig. 1. oR�x1x2 is the radar coordinate system, andoT�x1x2 is the target coordinate system fixed on thetarget. Usually high pulse repetition frequency (HPRF)waveform is transmitted. The baseband signal aftermotion compensation is [10]
GðnÞ ¼
ZsðxÞexp �j
4pf0
crnUx
� �dx ð1Þ
where s(x) is the target reflectivity distribution; x is thetarget scatterer positional vector; f0 is the carrierfrequency; c is the light speed; rn is the unit vectorparallel to oRoT at the time when the nth pulse istransmitted. The integration is carried out over thevolume of target. Eq. (1) represents the samples of theFourier transform of the reflectivity collected along an arcof the circumference [10]. By taking inverse discreteFourier transform (IDFT) of the sequence G(n), a discreteone-dimensional profile of the target reflectivity along thecross-range, i.e., HRDP, is obtained. The resolution ofHRDP Dl turns out to be inversely proportional to thevariation of the attitude angle Dg, i.e.,
Dl¼l
2sinðDgÞð2Þ
where l is the wavelength.
3. Maneuver detection
3.1. Detection principle
The attitude usually varies abruptly as the targetmaneuvers, e.g., bank-to-turn motion of the fixed-wing
Fig. 1. The geometry of radar and target.
aircraft. Actually, the attitude also varies as the targetperforms nonradial straight motion with a constantvelocity. However, the attitude rates are distinct betweennonmaneuvering and maneuvering motions. It is assumedthat target velocity is along the x1-axis as shown in Fig. 1.Thus the target attitude angle g is
g¼jþp�y ð3Þ
where j is the target azimuth; y is the heading of targetvelocity.
When the target does not maneuver, the attitude rateis
on ¼ _j ¼ r0vsingr2
0þv2t2þ2r0vt cosg�
vsingr0
ð4Þ
where r0 is the target initial range; v is the target velocity.The approximation in the last line amounts to assumingthat target position variation is ignorable comparing withtarget initial range r0. On the other hand, when the targetmaneuvers, the attitude rate is
om ¼ _j� _y ¼ r0vsingr2
0þv2t2þ2r0vt cosg�
ac
v
�vsing
r0�
ac
vð5Þ
where ac is the target centripetal acceleration. Themotion equation _y ¼ ac=v is used during the derivationof (5).
From (5), if the target range is far enough that v2 sing/r0ooac holds when the target performs a centripetalaccelerated motion, the magnitude of attitude rate undermaneuvering situation is much greater than that ofnonmaneuvering situation. However, when the targetperforms a tangential accelerated motion, i.e., ac=0, on in(4) and om in (5) have the same expression. The differenceof the attitude angle variation between nonmaneuveringand maneuvering motions is hard to distinguish duringcoherent processing interval (CPI). Then we will focus ourattention on centripetal accelerated maneuver detectionin this paper, which is one of the current hot topics inmaneuver detection. Not only because the centripetalaccelerated maneuver is that aerial targets, especiallymilitary targets, usually perform during a combat, butbecause it has great impacts on the target trackingperformance [4–7]. Actually, under most realistic flightregimes, tangential accelerations (drag and thrust) aregenerally smaller in magnitude and of shorter durationthan centripetal (lift) accelerations [11].
From the resolution formula (2), the minimumvariation of attitude angle is required to obtain targetHRDP. Consequently, CPI can be appropriately deter-mined, so that the variation of attitude angle is less thanthe minimum required when the target performs non-maneuvering motion and that the variation of attitudeangle meets the profiling requirements when the targetperforms maneuvering motion. It is thus unable todistinguish scatterers from target HRDP, and the targetbehaves as a point target under nonmaneuvering situa-tion. On the other hand, under maneuvering situation it isable to distinguish multiple scatterers from target HRDP,and the target behaves as an extended target. This is the

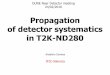
Fig. 2. The block diagram of detector and detailed architecture of NN.
Y. Zhu et al. / Signal Processing 91 (2011) 1054–10591056
principle of the maneuver detection using HRDP. Then CPIis the key parameter. The variation of attitude angle canbe approximated as DgiEoiT (i=m, n), and the require-ments of CPI are
lv
2Lac¼
lr2vL
oTolr0
2vLsingð6Þ
where L is the target length along cross-range; r=v2/ac isthe radius of the turn that the target performs. It is usuallymuch less than target initial range r0, so the range of CPI iswide.
3.2. Detector design
From (1), target HRDP is sensitive to attitude, and isnonstationary during target motion. Using the classicalapproach to design a detector is much too difficult.In this paper we reformulated the maneuver detectionproblem as an adaptive pattern classification problem[12]. Different classes such as maneuvering and nonma-neuvering motion mode are distinguished. A classifierbased on back propagation (BP) neural network (NN)is developed. The five features extracted from HRDPinclude:
(1)
Fig. 3. The timing diagram of the actual maneuver and the output of theThe number of peaks above a threshold, and we setthe threshold five times of the mean.
detector.
(2) �10 dB width of HRDP, and this feature is connectedwith target size in cross-range.
(3)Table 1Simulation parameters.
Parameters Value
Radar waveform Carrier frequency 10 GHz
Wavelength 3 cm
PRF 100 kHz
Radar location Height 0
Horizontal range 20–50 km
The correlation coefficient Z between left and right ofthe maximum
Z¼PminðK þ ,K�Þ
k ¼ 1 ½Gþ ðkÞ�Gþ�½G�ðkÞ�G
��ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiPminðK þ ,K�Þ
k ¼ 1 ½Gþ ðkÞ�Gþ�2
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiXminðK þ ,K�Þ
k ¼ 1½G�ðkÞ�G
��2
r
ð7Þ
where G+(k) and G�(k) are the left and right part of
the maximum HRDP, respectively; Gþ
and G�
aretheir mean values; K+ and K� are their length.
Azimuth 01–3601
(4)Target size Wingspan 11.43 m
Height 4.66 m
Length 17.07 m
The position of the maximum Pmax
Pmax ¼ arg max1rkrK
GðkÞ�� �� ð8Þ
The position of the centroid Pcen
(5)Aircraft initial state Height 1800 m
Speed 270 m/s
Sideslip angle b 01
Trajectory angle a 01
Pcen ¼XK
k ¼ 1
kGðkÞ
:GðkÞ:F
=XK
k ¼ 1
GðkÞ
:GðkÞ:F
ð9Þ
where K is the length of HRDP; 99 � 99F is the Frobeniusnorm. The last three features reflect the symmetry ofHRDP in a sense. The developed NN is made upof three layers. The input layer and the only onehidden layer both consist of five neurons, and theoutput layer consists of two. The neurons of input andhidden layer are all nonlinear, using a hyperbolictangent sigmoid activation function, and those ofoutput layer are linear. The outputs are linearlycombined to produce the final output, where thefinal decision is made. The block diagram of thedetector and the detailed architecture of the NN areshown in Fig. 2.
3.3. Performance evaluation
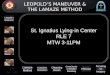
The timing diagram of the actual maneuver and theoutput of the detector are shown in Fig. 3.The maneuveronset time is t1, and the detector responds at the time t2.The time interval between them is known as the detectiondelay for the classical performance evaluation, which isdenoted as td=t1�t2. Clearly, td is randomly distributed,and its average value td is often employed for theevaluation of maneuver detection performance [4–6].

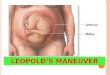
Fig. 4. The block diagram of simulation environment.
Y. Zhu et al. / Signal Processing 91 (2011) 1054–1059 1057
However, the index, average detection delay, does notreflect the detection probability after the time interval td,and the reliability of maneuver detector is questionable.
As a matter of fact, after the target maneuver onset thedetection probability will increase with time until reach-ing the steady state as shown in Fig. 3. The test statisticsconverge to the constant in probability. In order tomeasure the delay property more accurately andevaluate the detector performance more reasonably, themotion mode switch is regarded as a step input, and thedetection probability is regarded as a system response.We proposed two novel indices:
(1)
Delay constant te: The detection probability reaches(1�1/e) of its steady value after delay constant, wheree is the mathematical constant.(2)
Convergence time tc: The detection probabilityreaches 95% of its steady value after convergencetime.From the definitions, if the steady detection probabil-ities of different detectors or under different false alarmprobabilities are close together, the detection probabil-ities after the time intervals te and tc are close together aswell. However, it is not the same case for the averagedetection delay td due to the different distributions. Thusthe indices, delay constant te and convergence time tc,measure the delay property more reasonably.
1 http://www.jsbsim.org.2 http://www.surfaceoptics.com.3 http://www.flightgear.org.
4. Simulation experiments
4.1. Simulation scenario and environment
The target fighter F18 initially locates at the height of1800 m. It performs straight and level motion with anearly constant velocity 270 m/s in the first second, andthen performs a 6g (g is the gravitational acceleration)constant turn maneuver for another 3 s. The effects ofdifferent distances and attitudes between radar and targethave to be minimized in the experiment. Therefore, theradar positions are chosen at random in the horizontalplane. The horizontal distances uniformly distributebetween 20 and 50 km, while the azimuths uniformlydistribute between 01 and 3601. One thousand Monte
Carlo experiments are run. The simulation parameters arelisted in Table 1.
The experiment involves simulation of complex targetdynamic echoes. The block diagram of simulation envir-onment is shown in Fig. 4. The six-degree-of-freedom(6DOF) trajectory of the fighter F18 is generated by thesimulation software JSBSim,1 which is aimed at modelingflight dynamics and control for aircraft. The scatteringmatrices as a function of the polarization, azimuth andelevation angle are obtained through the high frequencyelectromagnetic simulation software RadBase.2 Then thetarget radar cross section (RCS) and thus the echo aregenerated according to the polarization of the transmit-ting and receiving antenna. HRDP is finally extracted formaneuver detection. In addition, the flight simulatorFlightGear3 is employed to realize three-dimensionalvisualization. Finally, the performance of the maneuverdetector is evaluated.
4.2. Simulation results
4.2.1. HRDP
The HRDP sequence extracted during a single MonteCarlo run is shown in the top of Fig. 5, where one singlecolumn represents one HRDP extracted during CPI. HRDPis expanded after the target maneuvers (see inside of therectangle). The features of maneuver onset are clearlyillustrated. The bottom of Fig. 5 shows HRDP at the timet=2 s, where the multiple scatterers can be obviouslydistinguished. The two strongest scatterers are estimatedand marked in the plot.
4.2.2. Detection delay
The histograms of detection delays are shown in Fig. 6.They are mostly less than 250 ms. The statistical resultsshow that 89.4% and 81.9% of the total number lie within250 ms, and the average detection delays are 113 and202 ms for PFA=5% and PFA=1%, respectively. The reactionspeed is comparable to the image-based method [5].There is no detection failure, where the detector failed torespond to maneuver. More details are listed in Table 2.

Table 2The detection results.
Parameters Value
The number of Monte Carlo runs 1000
False alarm probability PFA 5% 1%
Average detection delay td 131 ms 202 ms
Maximum detection delay td,max 2095 ms 2115 ms
Delay constant te 167 ms 224 ms
Convergence time tc 1274 ms 1359 ms
Detection probability Ptd49.43% 57.60%
Detection probability Pte 62.51% 61.33%
Detection probability Ptc 93.95% 92.17%
Steady detection probability 98.89% 97.02%
Fig. 7. ROC curves at different times.
Fig. 6. The histograms of detection delays under PFA=5% (top) and
PFA=1% (bottom).
Fig. 5. The HRDP sequence (top) and HRDP at the time t=2 s (bottom)
during a single Monte Carlo run.
Y. Zhu et al. / Signal Processing 91 (2011) 1054–10591058
4.2.3. ROC curve
A cluster of receiver operating characteristic (ROC)curves is shown in Fig. 7. The ROC curves are generated byexhaustively computing the detection probability PD at
the time of interest for different PFAs using Monte Carloruns. From Fig. 7, the detection probability increases withtime after maneuver onset (i.e., t=1 s), and reaches nearlysteady state after a certain time interval. The steadydetection probability is fairly high and stable.
4.2.4. Delay constant and convergence time
Fig. 8 shows the changes of the detection probabilityversus time for PFA=5% and 1%. Actually, it is the slice plotof Fig. 7 at the certain false alarm probabilities. Theaverage detection delays, delay constants, and conver-gence times are all marked in Fig. 8 and listed in Table 2.The detection probabilities after average detection delay,delay constant, and convergence time are denoted by Ptd
,Pte , and Ptc , respectively.
From these results, the detection probability is slightlydifferent under the two PFAs, and Pte and Ptc are also closetogether. However, the detection probability after averagedetection delay Ptd differs greatly, because of the differentdistributions of detection delays. Furthermore, Ptds arejust around 50%. The detection is unreliable after averagedetection delay. The reasonability of the proposed indicesis further verified.
Generally, the cluster of the ROC curves versus timereflects the detection performance of the detector mostcomprehensively. The proposed two novel indices reflect

Fig. 8. Delay constant and convergence time for PFA=5% (top) and
PFA=1% (bottom).
Y. Zhu et al. / Signal Processing 91 (2011) 1054–1059 1059
the delay property of a maneuver detector more reason-able than the classical index, average detection delay.
5. Conclusion
Although the maneuver detector is roughly developedand the features extracted from HRDP are fairly simple,the low detection delay and the high detection probabilitymake the maneuver detector very attractive.
However, target features extracted from HPRF pulseDoppler (PD) radar is limited. The more informative two-dimensional radar images can be obtained from highrange resolution radar, e.g. synthetic aperture radar (SAR)and inverse SAR (ISAR). The maneuver detection techni-ques based on SAR and ISAR are expected to be moreeffective and reliable. Indeed, Yang has pioneered thework [7]. The maneuver detection is reformulated as apattern classification problem in this paper. This providesa novel method to detect target maneuver. Further effortsare worth taking to extract more classifiable features andto develop a more effective classifier.
References
[1] X.R. Li, V.P. Jilkov, A survey of maneuvering target tracking—PartIV: decision-based methods, in: Proceedings of the SPIE Conferenceon Signal and Data Processing of Small Targets, vol. 4728, Orlando,FL, USA, April 2002, pp. 511–534.
[2] X.R. Li, V.P. Jilkov, Survey of maneuvering target tracking. Part V:multiple-model methods, IEEE Transactions on Aerospace andElectronic Systems 41 (4) (2005) 1255–1321 October.
[3] H.Q. Qu, L.P. Pang, S.H. Li, A novel interacting multiplemodel algorithm, Signal Processing 89 (11) (2009) 2171–2177November.
[4] J. Ru, V.P. Jilkov, X.R. Li, A. Bashi, Detection of target maneuveronset, IEEE Transactions on Aerospace and Electronic Systems 45(2) (2009) 536–554 April.
[5] S. Shetty, A.T. Alouani, A multisensor tracking system with animage-based maneuver detector, IEEE Transactions on Aerospaceand Electronic Systems 32 (1) (1996) 167–181 January.
[6] E.J. Hughes, M. Leyland, Target manoeuvre detection using radarglint, Electronics Letters 34 (17) (1998) 1695–1696 August.
[7] C. Yang, E. Blasch, Estimating target range-Doppler image slopefor maneuver indication, in: Proceedings of the SPIE Conference onSignal Processing, Sensor Fusion, and Target Recognition XVII, vol.6968, March 2008, Orlando, FL, USA, pp. 696808.1–696808.12.
[8] J.C. Yoo, Y.S. Kim, Data association and target identification usingrange profile, Signal Processing 84 (3) (2004) 571–587 March.
[9] L.M. Ehrman, W.D. Blair, Using target RCS when tracking multipleRayleigh targets, IEEE Transactions on Aerospace and ElectronicSystems 46 (2) (2010) 701–716 April.
[10] F. Berizzi, G. Corsini, Autofocusing of inverse syntheticaperture radar images using contrast optimization, IEEE Transac-tions on Aerospace and Electronic Systems 32 (3) (1996) 1185–1191July.
[11] J.D. Kendrick, P.S. Maybeck, J.G. Reid, Estimation of aircraft targetmotion using orientation measurements, IEEE Transactions onAerospace and Electronic Systems AES-17 (2) (1981) 254–260March.
[12] S. Haykin, Signal detection in a nonstationary environmentreformulated as an adaptive pattern classification problem,Proceedings of the IEEE 86 (11) (1998) 2325–2344 November.