Embed Size (px)
Citation preview



A nuestros padres


Sumario
Prólogo 1
Introducción 1
Sección 1. Motor de Inducción Trifásico 1.1 Descripción de la planta 3
1.2 Campo magnético estatórico 5
1.3 Principios de funcionamiento 8
1.4 Fuerza motora 11
1.5 El deslizamiento 13
1.6 Campo magnético rotórico 14
1.7 Cupla en una máquina de inducción 15
1.8 Equivalente eléctrico de la carga mecánica 17
1.9 Rendimiento del motor 18
Sección 2. Control Clásico de un Motor de Inducción
2.1 Principios de control 20
2.2 Análisis del motor de inducción según el criterio clásico 20
2.3 Variables de control en el funcionamiento a lazo abierto 23
2.4 Control con flujo constante 25
2.5 Control de alimentación del motor de inducción 28
2.6 Conclusiones 30
Sección 3. Control en Coordenadas de Campo del Motor de inducción
3.1 Control con buen comportamiento dinámico 31
3.2 Modelo matemático del motor de inducción 31
3.3 Variables de entrada y salida en el modelo matemático 34
3.4 Modelo adaptado a las necesidades de control 34

3.5 Control en coordenadas de campo 38
3.6 Implementación del control en coordenadas de campo 44
3.7 Adquisición de la señal de flujo rotórico 45
3.8 Identificación de la constante de tiempo rotórica 47
3.9 Ventajas del control en coordenadas de campo 48
Sección 4. Simulación de un Motor de Inducción
4.1 Utilidad de la simulación 49 4.2 Discretización del modelo matemático 49 4.3 Diagrama de flujo 53 4.4 Programa 54 4.5 Resultados de la simulación 55
Apéndice A. Nomenclatura 57
Apéndice B. Bibliografía 59

Prólogo
Los Motores de Inducción Trifásicos son máquinas eléctricas robustas, de bajo costo y poco mantenimiento ya que no tienen colector o anillos rozantes. A pesar de que estas ventajas son muy apreciadas en la industria, hasta hace unos pocos anos no se los utilizó en aplicaciones en las que fuera necesario variar su velocidad en un amplio rango o controlar la posición de su eje, ya que esto implicaba el use adicional de equipos electrónicos de alto costo y complejidad. Por este motivo, cuando se requerían movimientos variables o posicionamientos precisos, se usaban motores de corrien-te continua cuyos controladores son más económicos.
En 1969, K. Hasse ideo una técnica de control para el motor de inducción que permite la aplicación de los mismos principios que se utilizan en las máquinas de corriente continua, otorgando a los primeros una excelente calidad de respuesta dinámica. Esta estrategia, denominada Control en Coordenadas de Campo o Control Vectorial, ha comenzado a tener una difusión masiva solo en épocas recientes, cuando los avances en la microelectrónica significaron una mayor potencia de cálculo a un costo accesible.
Para realizar el Control en Coordenadas de Campo de un motor de inducción es necesario conocer con precisión y en todo instante el valor de su constante de tiempo rotórica. Este parámetro debe ser estimado en forma indirecta ya que normalmente no hay acceso eléctrico al rotor; además, su valor cambia con la temperatura, por lo que es necesario hacer un seguimiento permanente del mismo.
La Asociación Argentina de Control Automático (AADECA) otorga en 1994 una beca para un proyecto de investigación que tiene como objetivo la identificación en línea de la constante de tiempo rotórica de un motor de inducción utilizando técnicas de Redes Neuronales y Lógica Borrosa. El equipo de investigación, perteneciente al Instituto de Automática (Universidad Nacional de San Juan), está constituido por:
Estudiantes: Alejandro J. Quiroga y Cristina V. Rivarossa Director: Dr. Benjamin Kuchen Asesores: Ing. Daniel Patino, Ing. Fernando Di Sciascio,
Ing. Juan C. Correa e Ing. Jorge Infante 1

Dos Cuadernos Profesionales cubren temas relacionados al control de motores de inducción. En el presente volumen se realiza una introducción a la estructura del motor de inducción, exponiendo sus principios de funcionamiento y las estrategias de control más difundi-das, incluyendo la técnica de control en coordenadas de campo.
En el volumen Control de Motores de Inducción - Parte II se expondrán estrategias de identificación de la constante de tiempo rotórica de un motor de inducción utilizando técnicas de Redes Neuronales y Lógica Borrosa. Dichas estrategias (y los resultados de su aplicación a un esquema de control en coordenadas de campo) serán comparadas con métodos de identificación clásicos.
Introducción
Gracias al progreso de la tecnología de los semiconductores en los últimos anos, los equipos adicionales para realizar el control de un motor de inducción (MI) tienen ahora un precio conveniente que ha convertido a estas máquinas en una opción atractiva para aplicaciones de todo tipo, incluyendo tareas industriales y robótica. Por este motivo es útil conocer la estructura del MI, sus principios de funcionamiento y las estrategias de control más difundidas en la actualidad.
El presente trabajo esta organizado de la siguiente manera: En la Sección 1 se hace una breve descripción de la arquitectura de un motor de inducción y se analizan sus principios de funcionamiento. En la Sección 2 se describen algunas estrategias de control que siguen el criterio clásico. En la Sección 3 se realiza una modelación matemática completa del motor; este modelo es utilizado para exponer una introducción a la Teoría del Control en Coordenadas de Campo. En la Sección 4 se discretiza el modelo matemático del M I y se completa una simulación en computadora del mismo, funcionando bajo condiciones cambiantes de carga y de valores de referencia.
2

Sección 1. Motor de Inducción Trifásico 1.1 Descripción de la planta
A grandes rasgos el motor de inducción (MI) esta constituido por dos
elementos, el estator y el rotor. El estator es un cilindro hueco de hierro laminado, revestido por fuera con una carcaza de hierro fundido que sirve de soporte a toda la máquina. Internamente posee ranuras paralelas a su eje en las que se ubica el bobinado trifásico estatórico. Suponiendo una máquina de dos polos0, existen en el interior del estator tres arrollamientos de distribución senoidal1 separados 120° entre sí. En la Figura 1.1 se muestra un bobinado trifásico de dos polos con arrollamientos de una sola espira.
Figura 1.1. Sección transversal del estator simplificado de un Ml. 0 El concepto de «polos» en un bobinado trifásico proviene de las máquinas sincrónicas. Un bobinado estatórico trifásico de dos polos posee tres arrollamientos separados espacialmente 120 ° entre sí. Un bobinado trifásico de cuatro polos posee seis arrollamientos separados espacialmente 60°. En máquinas con más de un par de polos, la velocidad sincrónica se reduce en proporción directa al numero de pares.
1 La distribución senoidal provoca que la fuerza magnetomotriz (Fmm) producida por el arrollamiento aumente desde cero en los extremos hasta un máximo en el centro del arrollamiento en forma senoidal. Esto se hace aumentando senoidalmente la densidad de espiras hacia el centro del arrollamiento.
3

El núcleo del rotor es un cilindro macizo de hierro laminado con su superficie ranurada en forma paralela a su eje. Su diámetro es un poco menor que el espacio interior del estator de modo que, al estar dentro de el, existe un pequeño espacio denominado entrehierro de longitud radial constante entre ambas superficies cilíndricas.
El rotor de un MI puede ser de dos tipos: bobinado o jaula de ardilla. El primero posee un bobinado trifásico idéntico al estatórico, conectado en forma de estrella, dispuesto sobre las ranuras del rotor. En la Figura 1.2 se representa esquemáticamente el rotor bobinado.
Los tres extremos libres de los arrollamientos están conectados a
anillos rozantes fijos en el eje del rotor. Sobre estos se deslizan escobillas solidarias al estator que permiten acceso eléctrico al rotor. En condiciones normales de funcionamiento estas escobillas están conectadas entre si, quedando así cortocircuitados los arrollamientos del bobinado rotórico. Sin embargo, es posible cambiar el valor de la resistencia rotórica (mediante el agregado de un reóstato por fase con un cursor común a todos) modificando de este modo las características de respuesta del motor; el empleo de esta técnica con objetivos de control se describe en la sección 2.
El rotor de tipo jaula de ardilla posee un núcleo igual al anterior, pero sobre las ranuras están colocadas barras de cobre o aluminio cortocircuitadas en sus extremos por anillos del mismo material (ver Figura 1.3). Este rotor no esta conectado eléctricamente al exterior de la máquina.

Una gran mayoría de los MI poseen rotor jaula de ardilla debido a que su construcción es más barata y al no poseer contactos deslizantes, es de fácil mantenimiento.
1.2 Campo magnético estatórico
Para este análisis se supondrá un motor simplificado cuyo estator posee un bobinado trifásico con una espira por fase. Los resultados así obtenidos son de validez general. Si se conecta el estator a una fuente de tensión senoidal trifásica, se producen en las bobinas del mismo tres corrientes desfasadas 120° eléctricos entre sí (ver Figura 1.4).

A su vez cada una de estas corrientes produce una fuerza magnetomotriz (Fmm) perpendicular al plano de la espira por la que circula (ver Figura 1.5). Así existen tres vectores de Fmm (fi) cuyas direcciones están desfasadas 120° en el espacio. Estos vectores sumados, teniendo en cuenta sus magnitudes instantáneas, producen una Fmm resultante (FR) giratoria de amplitud constante en el interior del estator.
Se analizara la existencia de FR en dos instantes de tiempo. En la Figura 1.4 se observan dichos momentos separados entre si por 1.57 segundos (para una frecuencia de onda igual a 1/2π). Esta separación equivale a una distancia entre ambos momentos de 90° eléctricos.
En donde se supuso que I es la corriente pico y F es la Fmm pico (F =
N.I con N igual al número de espiras del arrollamiento). La distribución espacial de las fi calculadas y la resultante de su suma, FR , se muestran en la Figura 1.6 de acuerdo al criterio enseñado en la Figura 1.5.
El modulo de F. para los instantes t1 y t2 se puede calcular a partir de la Figura 1.6.
6


A partir de los resultados obtenidos se puede concluir que:
• La magnitud de la Fmm estatórica resultante es constante: FR= 3/2 F
• Un desplazamiento temporal de 1.57 segundos (π/2 radianes eléctricos) de t1 a t2 en las corrientes de alimentación ha provocado una rotación de la Fmm estatórica resultante igual a π/2 radianes en el espacio.
• Cuando se describe un ciclo eléctrico completo en las corrientes de entrada, la Fmm estatórica resultante da una vuelta completa dentro del estator; esto indica que gira con una velocidad angular ws sincrónica con la frecuencia de alimentación. Si la máquina tuviera un bobinado de más de un par de polos, la velocidad angular de FR seria menor que ws, en proporción directa al numero de pares de polos.
1.3 Principios de funcionamiento
Se analizará ahora la influencia del campo magnético2 estatórico (Bs)
giratorio sobre el rotor de la máquina. Sea un rotor con una espira en cortocircuito inmersa en el campo
magnético giratorio producido por el estator, se demostrará la existencia de una corriente iR en la espira y la aparición de una fuerza sobre ella, tendiente a hacerla girar en el sentido de rotación del campo estatórico. Se deducirá una expresión de dicha fuerza, Ilamada cupla motora. Las conclusiones obtenidas para este rotor simplificado son validas también para el rotor bobinado y el jaula de ardilla.
2 Hablar de fuerza magnetomotriz (Fmm) o de Campo Magnetico (B) en este análisis simplificado es equivalente, ya que ambos vectores poseen la misma direccion y sentido y solo difieren en magnitud; Fmm = Ø.R = B.A.R donde R = reluctancia y A = área de la espira.
8

En la Figura 1.7 se observa que el campo magnético estatórico Bs que atraviesa la espira a una velocidad angular ws está en un punto en el que provoca un máximo de flujo magnético a través de la espira
(Φe)' ΦeMAx = Bs.A = Bs.I.d. Al seguir girando Bs, el flujo Φe tiende a disminuir; de acuerdo a la ley de Faraday-Lenz en la espira se producen una fuerza electromotriz (Fem) inducida y una corriente en el mismo sentido, que a su vez provocan un campo magnético rotórico tendiente a contrarrestar la variación de flujo a través de Ia espira.
En la Figura 1.8 se observa la dirección de la Fem inducida (eR) en la espira. Su valor se deduce a continuación.
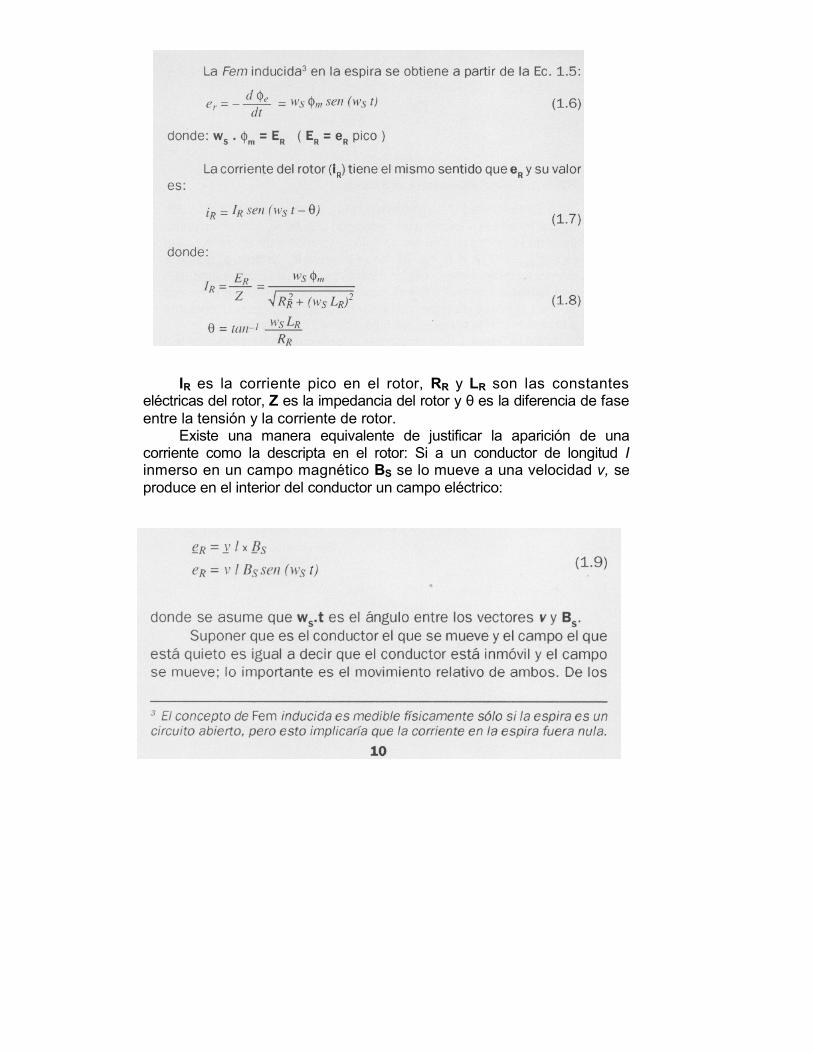
IR es la corriente pico en el rotor, RR y LR son las constantes eléctricas del rotor, Z es la impedancia del rotor y θ es la diferencia de fase entre la tensión y la corriente de rotor.
Existe una manera equivalente de justificar la aparición de una corriente como la descripta en el rotor: Si a un conductor de longitud I inmerso en un campo magnético BS se lo mueve a una velocidad v, se produce en el interior del conductor un campo eléctrico:

cuatro lados de la espira solo ‹‹trabajan›› dos, aquellos paralelos a la generatriz del rotor; estos conductores se Ilaman ‹‹costados de la bobina››. Si se asume que el campo estatórico incide perpendicular-mente sobre la superficie del rotor (esto es muy aproximado a la realidad), se puede decir que el rotor esta inmerso en un campo uniforme, que gira con velocidad angular w..
La Fem inducida en la espira se calcula a partir de la Ec. 1.9:
que coincide con el resultado hallado en la Ec. 1.6, luego la corriente IR es la de la Ec. 1.7.
1.4 Fuerza motora
De acuerdo con la ley de Biot-Savart, cuando un conductor portador de corriente se halla inmerso en un campo magnético, aparece sobre él una fuerza:

En la Figura 1.9 se puede observar que la dirección de las
corrientes en los costados de la espira es siempre perpendicular a la dirección del campo magnético estatórico; esto significa que la Ec. 1.11 puede simplificarse reemplazando el producto vectorial por un producto escalar.
Las fuerzas sobre los costados de la espira producen sobre el eje
del rotor una cupla:
Si se combina este resultado con los obtenidos en las Ecs. 1.7 1 1.11:
Reagrupando se Ilega a la ecuación de cupla instantánea con el rotor detenido:
4 Hasta el momento se ha supuesto que el rotor esta detenido. Más adelante se estudiará el efecto que produce la variación del movimiento relativo entre el campo estatórico y el rotor, cuando éste so pone en marcha.
12

Sin embargo, el valor de la cupla instantánea no tiene interés práctico y conviene obtener una expresión de la cupla motora media. Mediante la aplicación de una equivalencia trigonométrica5 a la Ec. 1.15 se puede Ilegar a:
En esta ecuación, dado que se busca el valor medio de la cupla, sólo
el primer término de la resta es útil, ya que es independiente del tiempo; el valor medio temporal del segundo término es nulo. A partir de la Ec. 1.8 se puede calcular que:
Este resultado combinado con la Ec. 1.16, permite Ilegar al valor
medio de la cupla motora con el rotor detenido:
1.5 El deslizamiento
En el análisis precedente se encontró una expresión de la cupla
producida por la rotación del campo magnético estatórico respecto del rotor. Es esta velocidad relativa la que provoca la aparición de una corriente inducida en el rotor y por lo tanto de una cupla sobre el mismo que tiende a hacerlo girar en el sentido de rotación del campo. Dado que se supuso al rotor detenido, la velocidad relativa utilizada en los cálculos fue siempre la velocidad del campo estatórico, ws.

Si se libera al rotor, éste se pone en movimiento con una
velocidad absoluta wR de manera que ahora la velocidad relativa (o velocidad de deslizamiento) entre el campo estatórico y el rotor es:
En este punto es conveniente definir el deslizamiento s: El deslizamiento es un coeficiente adimensional cuyo valor es
máximo (s=1) cuando el rotor está detenido y es mínimo (s=0) si el rotor gira a velocidad sincrónica. En un motor real funcionando en vacío (sin carga) s vale aproximadamente 0.003; el rotor no gira exactamente a la velocidad sincrónica porque debe vencer la fuerza de rozamiento de sus cojinetes. En la Figura 1.10, cuando wR = Ws (wSI= 0), la cupla motora se anula y la fricción tiende a frenar el rotor que, finalmente, alcanza una velocidad de equilibrio. La situación descripta pone en evidencia que el motor es, en si mismo, un sistema realimentado. 1.6 Campo magnético rotórico
Por el bobinado rotórico circula una corriente de forma senoidal6 iR inducida por el campo magnético estatórico, cuya frecuencia en el tiempo f2 , respecto del mismo rotor, es:
donde fs es la frecuencia de alimentación.
6 En realidad, la forma de la corriente rotórica depende del tipo de rotor del motor: bobinado trifásico, jaula de ardilla o elemental de una espira como el que se estudia. Sin embargo, la frecuencia de dicha corriente es la misma en todos los casos y las conclusiones obtenidas en este apartado son siempre validas.
14

La corriente iR produce a su vez un campo magnético Ilamado campo rotórico o campo inducido, que gira respecto del rotor a una velocidad angular ws, . Sumando a este valor la velocidad absoluta del rotor, se obtiene la velocidad del campo inducido con respecto a un sistema inercial solidario al estator:
Este resultado conduce a una conclusión importante: Ambos campos magnéticos7, inductor e inducido (estatórico y rotórico) giran a la misma velocidad ws. Esta es una condición necesaria para la transferencia de energía de su forma eléctrica a la mecánica o viceversa. Aunque en los motores de inducción siempre se cumple, no sucede lo mismo en los motores o generadores sincrónicos. Entre estos dos campos solo existe una diferencia de fase; el campo estatórico adelanta al rotórico con un ángulo δ, llamado “ángulo de carga” (es una medida de la cupla de carga que soporta el motor).
1.7 Cupla en una máquina de inducción
Una vez definido el deslizamiento es posible expresar a la cupla media en el eje del rotor en función de la velocidad de deslizamiento.
Reemplazando en la Ec. 1.18 ws par wsi:
Esta ecuación fue deducida para un rotor elemental de una espira. Se puede demostrar [1] que la expresión de la cupla para un rotor real bobinado o del tipo jaula de ardilla es de la misma forma que la Ec. 1.23 y difiere únicamente en una constante de proporcionalidad (KM). Dicha constante es función de las dimensiones físicas del rotor 7 Los campos magnéticos estatórico y rotórico componen un campo resultante y es éste el único campo magnético medible. A efectos del análisis del comportamiento dinámico del Ml es conveniente conservar una distinción conceptual entre ellos.
15

y del número de espiras de su bobinado. Por lo tanto la ecuación de cupla general para un MI es:
Esta ecuación es válida para cualquier velocidad del rotor. En la Figura
1.10 se muestra la forma de la cupla T contra dos ejes de abscisa, velocidad absoluta del rotor ws y velocidad de deslizamiento ws1 .
A partir del análisis de la Ec. 1.24 y la Figura 1.10 es posible obtener
algunas conclusiones importantes:
a. Derivando la Ec. 1.24 e igualando a cero se deduce la

condición de wSI para cupla máxima de salida
b. Reemplazando este valor de wSI en la Ec. 1.24 se obtiene el valor de la cupla máxima:
c. Siempre que la máquina de inducción produzca una cupla de salida positiva, su comportamiento se asimila al de un motor. Sin embargo, si la cupla es negativa, debe haber un «motor impulsor» exterior que haga girar el rotor a una velocidad mayor que ws. El motor impulsor está entregando energía a la red y la máquina de inducción se encarga de convertir dicha energía de mecánica a eléctrica. Ambos dispositivos trabajando juntos se denominan Grupo Generador Asin-crónico. Para funcionar de esta manera, el sistema debe conectarse a una red que posea, al menos, un generador sincrónico. Esto se debe a que en la máquina asincrónica los campos estatórico y rotórico siguen siendo inductor e inducido respectivamente y siguen girando ambos a velocidad sincrónica ws. El cambio está en que si wR > ws, el campo rotórico está adelantado en fase respecto del estatórico y el ángulo de carga δ es ahora negativo.
1.8 Equivalente eléctrico de la carga mecánica
A partir de la Ec. 1.8 y teniendo en cuenta que el rotor puede girar libremente, la expresión de la corriente rotórica pico es:
en donde, como se dijo, wSI es la velocidad relativa entre el campo
17

inductor y el rotor. Multiplicando y dividiendo por ws:
Este resultado es equivalente a suponer que el rotor esta inmóvil y por lo tanto no se entrega potencia mecánica en el eje. Sin embargo, la potencia eléctrica disipada en el bobinado rotórico ha cambiado; hay un término de potencia extra asociada a una resistencia RE Ilamada «equivalente eléctrico de la carga mecánica»:
El valor de esta carga eléctrica ficticia sigue una variación que se
asemeja a una función hiperbólica desde RE = 0 cuando el rotor está
detenido hasta RE = ∞ cuando el rotor gira a velocidad sincrónica.
1.9 Rendimiento del motor
Haciendo el cociente entre la Potencia Útil entregada al eje del motor y la Potencia Activa Total disipada en el rotor, se obtiene el rendimiento η de la máquina.
18

19
Como era de esperar, el rendimiento aumenta a medida que la velocidad del rotor se acerca a la velocidad sincrónica.
19

Sección 2: Control Clásico de un Motor de Inducción
2.1 Principios de control
Realizar el control de posición o velocidad en un MI es una tarea compleja para la cual no ha surgido aun una solución generalizada. Existe un gran número de propuestas que, en su mayoría, son solo útiles para máquinas especiales o ciertas aplicaciones particulares. En esta sección se estudiaran algunas estrategias clásicas de control. En ellas se asumen condiciones de operación en estado estacionario, simplificando notablemente de ese modo el modelo matemático del sistema.
Como norma general, los pasos a seguir para solucionar un
problema de control son los siguientes:
1 - Adoptar un esquema simplificado de la planta a controlar. 2 - Encontrar las ecuaciones temporales que describen la dinámica del
sistema. 3 - a. Calcular la Transformada de Laplace de las ecuaciones halladas en el
ítem anterior. b. Realizar un diagrama en bloques y determinar a partir de este la función de transferencia (FT) del sistema.
(EI paso 3 puede obviarse si se desea completar el análisis en el dominio temporal).
4 - Elegir las posibles variables de control del sistema a partir de su FT. 5 - Analizar las cualidades de respuesta de la planta a lazo abierto y, en
caso de ser necesario, agregar un lazo de control que brinde al sistema las características de funcionamiento deseadas.
2.2 Análisis del MI según el criterio clásico
La planta a controlar esta formada por un MI, conectado a una red de
alimentación trifásica, que mueve con su eje una carga rotativa
20

a la cual se asocia una cupla de carga TL. En la Figura 2.1 se esquematiza el conjunto motor-carga (en el apéndice A se detalla la nomenclatura).
La ecuación que describe el equilibrio del sistema es:
Reemplazando Td por la expresión hallada en el apartado 1.7 (Ec.
1.24) se obtiene:
Cuando la máquina supera el transitorio y alcanza un estado de
equilibrio, la variación de wR respecto del tiempo es nula y la Ec. 2.2 se simplifica:
En la Figura 2.2 se ha graficado la curva de salida del MI junto a dos
cuplas de carga constantes frente a la velocidad (TL, y TL2).

Suponiendo que la máquina funciona con una cupla de carga TL1, existen dos puntos de equilibrio producidos en la intersección de Td y TL1.
El punto A es un punto de equilibrio inestable; el siguiente análisis
explica el porque de su inestabilidad: Si se supone al sistema inicialmente funcionando en el punto A y por cualquier motivo, ajeno al conjunto motor-carga, la velocidad wR aumenta, la cupla motora supera a la de carga y la máquina se acelera Ilegando el sistema al punto de funcionamiento B. Si, por el contrario, a partir del punto A se disminuyese la velocidad, TL1 superaría a Td forzando al motor a detenerse.
El punto B es de equilibrio estable ya que, si cualquier perturbación externa produce un aumento o disminución de la velocidad wR , cuando dicha perturbación desaparece el sistema retorna por sí solo al punto de funcionamiento B.
La condición necesaria para que cualquier punto de intersección entre Td y TL sea un punto de funcionamiento estable es que en ese lugar la pendiente de la cupla motora sea menor que la pendiente de la cupla de carga.

Se puede ver también en la Figura 2.2 que si el motor, estando detenido, intentase arrancar con una carga TL1, no podría hacerlo. Para que el motor pueda llegar a un punto de funcionamiento estable no debe haber entre éste y el arranque ningún punto inestable; esto implica que la cupla motora debe superar siempre a la cupla de carga. Este sería el caso si el motor tuviese una cupla de carga TL2.
2.3 Variables de control en el funcionamiento a lazo abierto
Como el conjunto motor-carga es intrínsecamente un sistema realimentado, el empleo del término «a lazo abierto» no es del todo adecuado, sin embargo se asumirá de ahora en más que cerrar el lazo del sistema consiste en agregar una realimentación de control externa. A partir de la Ec. 1.24 y teniendo en cuenta que ER = Ws
.Øm (ver Ec.
1.6) se puede expresar la cupla de salida del motor como:
En la Ec. 2.4 se pueden observar posibles variables de
control: la resistencia del rotor (RR), la tensión del estator (ES) y la velocidad angular del campo estatórico definida por la frecuencia de la red de alimentación (WS). No se ha tenido en cuenta la inductancia del rotor (LR) que es muy difícil de variar, ni el número de polos de la máquina, ya que esta estrategia de control no es aplicable en motores de fabricación estándar.
Un cambio en cualquiera de las variables mencionadas se vé
23

reflejado en una modificación de la curva de cupla del MI. Esta variación de la curva provoca que el punto de equilibrio entre Td y TL cambie de posición alterando en consecuencia la velocidad del rotor (wR).
En la Figura 2.3 se muestra el efecto que produce la variación de ES y RR sobre la curva de salida del motor. Luego de un aumento de la resistencia del rotor, la salida del motor corresponde a la curva 2, en tanto que una disminución de la tensión de estator transforma la curva de cupla 1 en la 3.
Hay que aclarar que la posibilidad de variar la resistencia RR esta restringida a los motores con rotor bobinado, ya que los extremos de los arrollamientos rotóricos son accesibles desde el exterior por medio de anillos rozantes.
Se puede ver en la Figura 2.3 que el rango de variación de
velocidad es mayor con un cambio de RR (∆ WR = B) que con una modificación de ES (∆WR=A).
Otra ventaja de controlar RR es que se pueden lograr grandes cuplas de arranque. Esta cualidad es utilizada al mover cargas pesadas; se arranca el sistema con RR alta y se la disminuye a medida que el motor aumenta la velocidad hasta Ilegar a RR mínima cuando se cortocircuitan las escobillas de los anillos rozantes. En la Figura 2.4 se muestra el esquema eléctrico del rotor con resistencia variable.
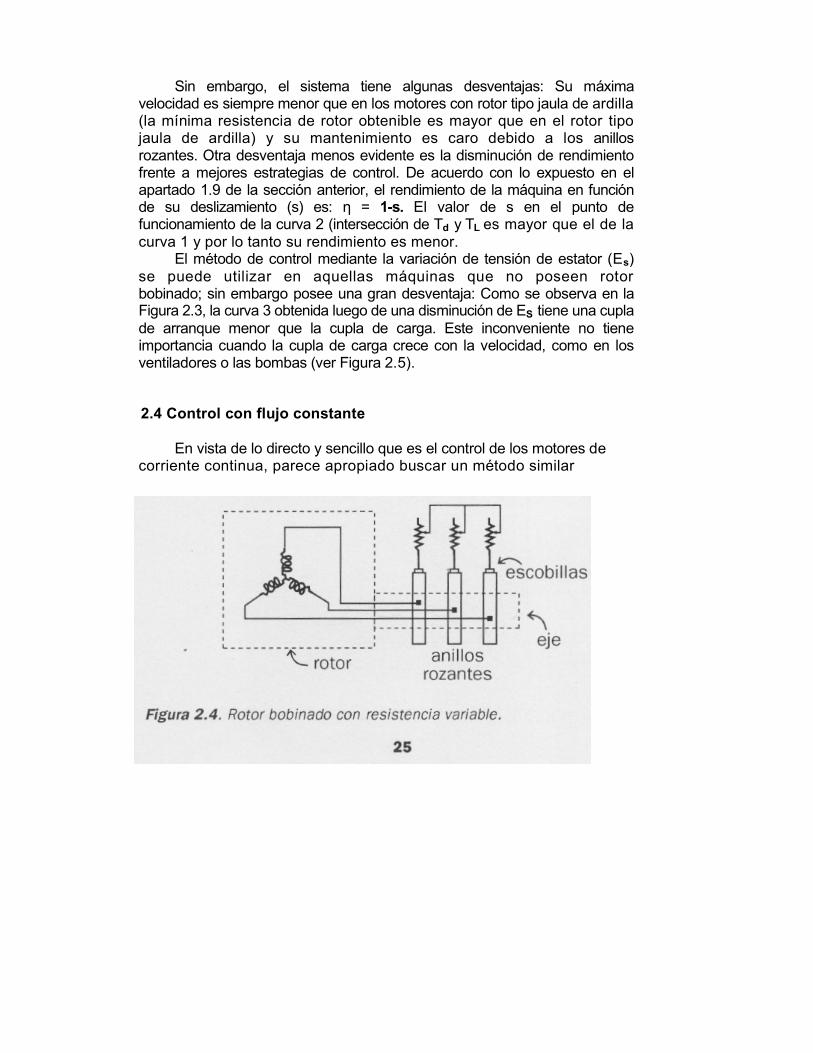
Sin embargo, el sistema tiene algunas desventajas: Su máxima velocidad es siempre menor que en los motores con rotor tipo jaula de ardilla (la mínima resistencia de rotor obtenible es mayor que en el rotor tipo jaula de ardilla) y su mantenimiento es caro debido a los anillos rozantes. Otra desventaja menos evidente es la disminución de rendimiento frente a mejores estrategias de control. De acuerdo con lo expuesto en el apartado 1.9 de la sección anterior, el rendimiento de la máquina en función de su deslizamiento (s) es: η = 1-s. El valor de s en el punto de funcionamiento de la curva 2 (intersección de Td y TL es mayor que el de la curva 1 y por lo tanto su rendimiento es menor.
El método de control mediante la variación de tensión de estator (Es) se puede utilizar en aquellas máquinas que no poseen rotor bobinado; sin embargo posee una gran desventaja: Como se observa en la Figura 2.3, la curva 3 obtenida luego de una disminución de ES tiene una cupla de arranque menor que la cupla de carga. Este inconveniente no tiene importancia cuando la cupla de carga crece con la velocidad, como en los ventiladores o las bombas (ver Figura 2.5).
2.4 Control con flujo constante
En vista de lo directo y sencillo que es el control de los motores de corriente continua, parece apropiado buscar un método similar

aplicable a los motores de inducción. Una estrategia muy utilizada en los primeros consiste en mantener el flujo de magnetización constante mientras el motor gira por debajo de la velocidad nominal. Esto permite controlar la cupla en forma directa variando sólo la corriente de armadura. Se puede lograr una aproximación a esta estrategia en el motor de corriente alterna.
En la Ec. 2.4 se observa que variando la tensión Es en proporción directa a la frecuencia ws, se mantiene constante al flujo � m. Esta variación de Es y ws provoca desplazamientos horizontales de la característica cupla-velocidad del motor. Se puede deducir a partir de la Ec. 2.5 que si el cociente (ES / ws) se mantiene constante, no cambian la forma ni las dimensiones de la curva de cupla, pero si varía su posición. Esto se observa en la Figura 2.6 para cuatro valores distintos de Es y Ws .

Si la variación de Es y ws se Ileva a cabo siguiendo un criterio adicional al de mantener constante el cociente Es / ws , se puede obtener una cupla de salida constante e independiente de la velocidad del rotor (wR). Esta condición es aumentar o disminuir ws en la misma medida en que cambie wR de modo que el término wSI = (Ws - wR) se mantenga constante. En la Ec. 2.5 se puede ver que si se sigue la estrategia descripta, Td se mantiene constante y se obtiene una curva de salida como la enseñada en la Figura 2.7.

2.5 Control de alimentación del motor de inducción
En el apartado anterior se describió una estrategia de control en la que es necesario variar a voluntad la tensión de estator Es y la frecuencia ws; sin embargo estos valores están fijados por la red de alimentación.
Es necesario entonces insertar un circuito denominado «convertidor de corriente alterna» que se encarga de adaptar las constantes de la red trifásica a los requerimientos del motor. En la Figura 2.8 se muestra un convertidor muy utilizado debido a su reducido número de componentes. Está compuesto de un rectificador y un inversor unidos mediante un lazo intermedio de corriente.
Los seis tiristores de la izquierda forman un rectificador de control total que permite obtener un lazo de corriente continua unidireccional y, tensión continua variable de modo de entregar al inversor un nivel controlado de potencia.
Dicho inversor está formado por los seis tiristores de la derecha y su misión es reconstruir una onda alterna trifásica para alimentar al motor. La onda de salida del inversor no tiene variación senoidal sino alternante en forma escalonada; ésto no reviste mayor importancia para frecuencias medias y altas debido a las cualidades filtrantes del motor.
Con un manejo adecuado del convertidor se puede invertir el flujo de energía (cambiando el sentido de VD) siendo ahora el motor el que entrega energía a la red. Este efecto se denomina «frenado regenerativo» ya que la energía que el motor entrega es la energía cinética almacenada en el conjunto motor-carga y ésta se agota cuando el sistema se detiene.
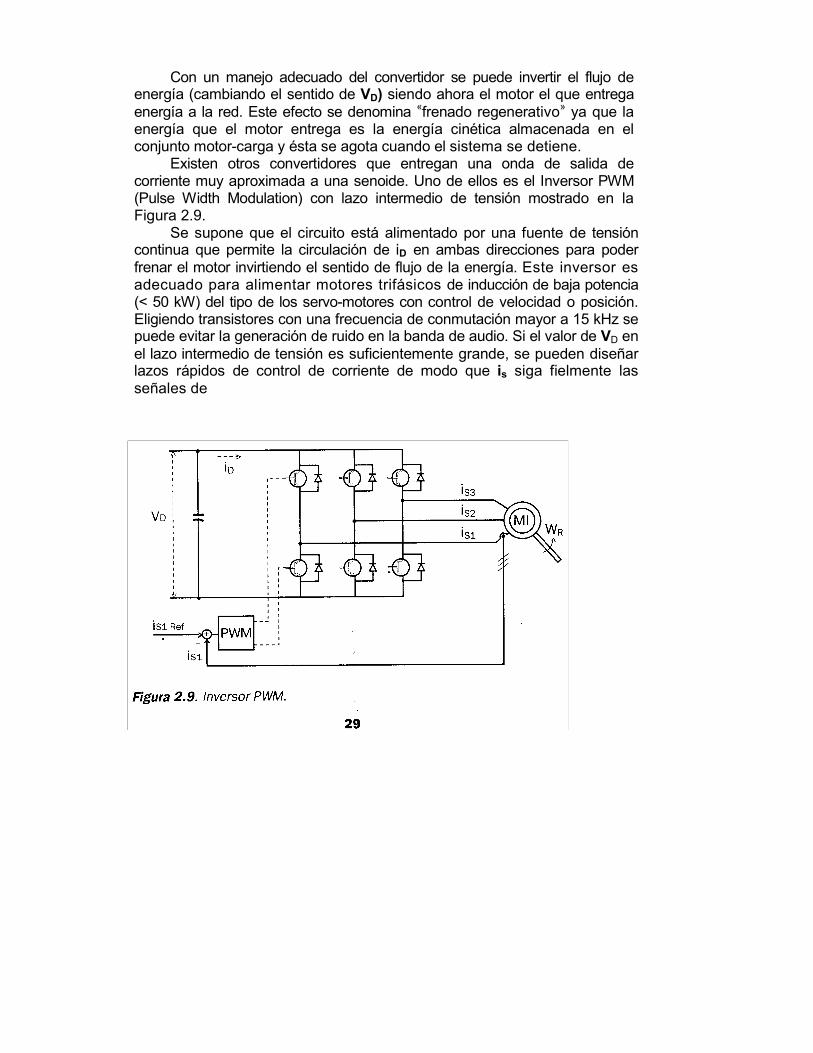
Existen otros convertidores que entregan una onda de salida de corriente muy aproximada a una senoide. Uno de ellos es el Inversor PWM (Pulse Width Modulation) con lazo intermedio de tensión mostrado en la Figura 2.9.
Se supone que el circuito está alimentado por una fuente de tensión continua que permite la circulación de iD en ambas direcciones para poder frenar el motor invirtiendo el sentido de flujo de la energía. Este inversor es adecuado para alimentar motores trifásicos de inducción de baja potencia (< 50 kW) del tipo de los servo-motores con control de velocidad o posición. Eligiendo transistores con una frecuencia de conmutación mayor a 15 kHz se puede evitar la generación de ruido en la banda de audio. Si el valor de VD en el lazo intermedio de tensión es suficientemente grande, se pueden diseñar lazos rápidos de control de corriente de modo que is siga fielmente las señales de

30
referencia. Los controladores para los transistores comúnmente emplean una salida PWM de baja generación de ruido acústico. En caso de que el ruido no sea un problema existe la alternativa de utilizar un simple sistema si-no con una pequeña banda de histéresis que rodea a la señal de referencia.
2.6 Conclusiones
En el análisis de los esquemas de control descriptos se ha
supuesto que el sistema funciona en estado estacionario y que las corrientes y tensiones son todas de forma senoidal. Aún cuando el modelo obtenido en base a estas simplificaciones tiene la ventaja de ser sencillo, no resulta adecuado para analizar la respuesta del sistema ante transitorios (cambios rápidos en la carga o en la alimentación, etc.). Por otro lado se debe tener en cuenta que existen muchas aplicaciones en las que no se requiere una alta velocidad de respuesta, como las bombas o los ventiladores. Cuando se busca un sistema de control que brinde una respuesta dinámica de buen desempeño, es necesario hacer un análisis matemático más profundo del conjunto motor-carga-controlador; este tema será tratado en la siguiente sección.

Sección 3. Control en Coordenadas de Campo del Motor de Inducción
3.1 Control con buen comportamiento dinámico
El esquema de control descripto en la sección anterior no es adecuado para alcanzar una respuesta dinámica de buen desempeño. El control del flujo a lazo abierto no permite operar con cupla máxima en bajas velocidades o aun con el rotor detenido. Esto excluye, por ejemplo, su aplicación como servo-motor.
Con el objeto de eliminar estas restricciones es necesario hallar un modelo matemático completo del MI, basado en los valores instantáneos de las corrientes y tensiones de estator y rotor.
3.2 Modelo matemático del motor de inducción
Para describir completamente el sistema motor-carga, se debe encontrar un conjunto de ecuaciones que incluyan el equilibrio eléctrico y mecánico. Las ecuaciones eléctricas del modelo se hallan haciendo un análisis vectorial del equilibrio de tensiones en los arrollamientos rotórico y estatórico; para éste último se obtiene la siguiente relación:
Esta ecuación indica que la tensión de alimentación del estator us(t)
es igual a la suma de todas las caídas de tensión producidas dentro del arrollamiento. Dos de ellas son funciones de is(t) y dependen de constantes del estator (Rs y Ls). La tercer caída de tensión es función de la corriente de rotor iR(t) y depende de la inductancia mutua de los arrollamientos rotórico y estatórico (Lm).
Dado que todas las variables que integran una ecuación deben estar referidas al mismo sistema de coordenadas, en la Ec. 3.1 se
31

puede ver que el vector de corriente de rotor iR(t) fue cambiando de sistema de referencia, de coordenadas de rotor a coordenadas de estator. Esto se hizo sumando el ángulo E a la coordenada polar de dicho vector:
En la Figura 3.1 se representa el cambio de coordenadas de la Ec. 3.2. Del mismo modo se puede encontrar una ecuación que describa el
equilibrio eléctrico del arrollamiento rotórico, en coordenadas rotoricas: El siguiente paso es encontrar una forma de describir el equilibrio
electromecánico del sistema. Se puede demostrar [1] que la expresión de la cupla motora en función de las corrientes de rotor y estator es:

De acuerdo a la ley de Newton para movimiento rotacional, la diferencia entre la cupla motora Td y la cupla de carga TL es directamente proporcional al cambio de la velocidad angular del rotor; entonces:
Ahora es posible expresar el modelo matemático completo del MI como el conjunto de las ecuaciones de equilibrio eléctrico y mecánico:
Aunque no esta explicitamente aclarado en las ecuaciones iS, iR uS, Td,TL y WR son funciones del tiempo.
Este modelo multivariable y no lineal es válido para el análisis dinámico del motor, con cupla y velocidad variables y tensión de alimentación de forma de onda arbitraria. De hecho, debido a que el punto neutro del arrollamiento estatórico (conectado en estrella) está aislado, las ecuaciones del modelo serán válidas aún si Ia suma de las tensiones de cada fase es no nula (µS1(t)+µS2(t)+µS3(t)≠0). Esto sólo significa que el neutro del bobinado asume un potencial distinto al neutro de referencia de las tensiones de alimentación. Del mismo modo, los resultados pueden generalizarse a un sistema alimentado con una fuente de tensión que tenga impedancias no nulas, constantes e iguales por fase. Esto se hace incluyendo adecuadamente dichas impedancias en las constantes del estator (RS y LS).
33

3.3 Variables de entrada y salida en el modelo matemático
Las variables de entrada al motor y por consiguiente a su modelo matemático son la corriente y la tensión de estator. La máquina «trabaja» internamente con estos valores8 produciendo la corriente iR, la cupla motora y la velocidad del rotor. Usualmente la salida del sistema es la velocidad wR o la posición del rotor ε, que se obtiene integrando wR en el tiempo.
Si se asume que la corriente de estator es alimentada en las tres fases por medio de lazos rápidos de control de corriente, el modelo matemático se simplifica considerablemente ya que la ecuación de tensión de estator (3.6.a) pasa a ser gobernada por los controladores de corriente y puede ser omitida del modelo. Una fuente de alimentación que provee la condición de funcionamiento descripta es el Inversor PWM cuyo funcionamiento se explicó en el apartado 2.5.
3.4 Modelo adaptado a las necesidades del control
Con el objeto de llegar a un mejor modelo matemático se harán dos modificaciones sobre las Ecs. 3.6. La primera consiste en referir la ecuación de equilibrio eléctrico rotórico (3.6.b) a un sistema de coordenadas fijo en el estator; esto se hace multiplicando a todos los términos de la ecuación por ejε, lo que es equivalente a sumarles la coordenada angular que separa a los dos ejes de referencia.

La ecuación hallada representa el equilibrio eléctrico rotórico en coordenadas de estator.
Dado que la corriente de rotor no se puede medir en los motores jaula de ardilla, se hará una segunda modificación a las Ecs. 3.6: se sustituirá la corriente iR por una cantidad equivalente que pueda ser medida con un equipo de sensado referido al estator. Una practica común es elegir el vector de flujo rotórico ΦR definido en coordenadas de estator.
El flujo retórico gira con respecto al estator con velocidad wΦR:
tal que el ángulo ρ cumple en todo momento con la siguiente relación:
En la figura 3.2 se muestra que γ es la coordenada angular de iS respecto del estator, ρ es la coordenada angular de ΦR respecto del

estator y δ es el ángulo de carga9 que fue mencionado en el apartado 1.6. Combinando los resultados hallados en las Ecs. 3.7 y 3.8 con el
modelo 3.6 se obtiene un nuevo modelo del motor:
En este modelo todas las ecuaciones están referidas a coordenadas de estator y sus variables pueden ser medidas en este sistema de referencia. Dado que las primeras dos ecuaciones pueden separar-

se en parte real e imaginaria, esto representa un conjunto de seis ecuaciones diferenciales no lineales. Conviene expresarlas en esa forma de modo de facilitar su manipulación matemática (ver Ecs. 3.10)
En la figura 3.3 se pueden ver las componentes real e imaginaria de los vectores insertando estas expresiones en el modelo 3.9 y teniendo en cuenta que dos números complejos son iguales si lo son sus partes real e imaginaria se llega al modelo 3.10:
A pesar de que este modelo describe correctamente la dinámica del MI, es difícil encontrar una estrategia de control clara y directa a partir de la aplicación de sus ecuaciones. El diagrama de bloques de la Figura 3.4 ayuda a exponer esta idea.
El bloque de control debe ser capaz de comparar los valores de referencia con las señales de realimentación y generar una acción de control a través de la corriente de estator. Por ejemplo, para controlar la cupla del motor, debe calcular la cupla motora actual (Td) aplicando los valores sensados de iS y ΦR a la Ec. 3.10.e y comparar el resultado con la cupla de referencia Td Ref. Si la diferencia entre ambos valores (error de cupla) es positiva ( cuando Td Ref > Td), la acción de control
37

correcta debe tender aumentar is.
Expuesta superficialmente parece una estrategia sencilla, pero haciendo un análisis más detallado se puede ver que la relación matemática entre iS y ΦR en la Ec. 3.10.e es compleja; para calcular Td hay que obtener las componentes ortogonales de ambos vectores y esto requiere conocer con precisión sus coordenadas angulares respecto del estator (γ y ρ). Luego, al aumentar iS, se debe tener en cuenta nuevamente su coordenada angular y, ya que las componentes producen efectos distintos sobre la dinámica del MI.
Completar un lazo de control en forma clara siguiendo este camino se torna difícil, sin embargo, como se verá en el siguiente apartado, existe una manera más práctica y elegante de analizar las interacciones de las variables del motor.
3.5 Control en coordenadas de campo
La propuesta inicial del Control de Campo o Control Vectorial, fue realizada por Hasse [2] en 1969 y luego formalizada por Blaschke [3] en 1972. Su esencia consiste en definir un sistema de referencia en movimiento respecto del estator y luego referir a este las ecuaciones del modelo matemático del motor. Es común elegir un sistema de referencia que gire sincrónicamente con el vector de flujo rotórico.
En la Figura 3.5 se muestra, a modo de ejemplo, el vector representado en coordenadas de estator y en coordenadas de campo simultáneamente.

La nomenclatura que se utilizará en adelante es la siguiente:
Tal como se explicó en el apartado 3.4, para cambiar una ecuación
de sistema de referencia hay que multiplicar todos sus términos por e-jρ, donde –ρ es la coordenada angular que separa a los ejes de referencia; el signo negativo en el ángulo indica que al hacer el cambio de coordenadas, el sistema de origen está atrasado en fase respecto del destino.
Si se tiene en cuenta las siguientes relaciones matemáticas

y se opera sobre las ecuaciones del modelo 3.9, se llega al modelo 3.11:
Separando las ecuaciones en parte real y parte imaginaria se
obtiene un modelo equivalente al 3.10, pero ahora referido a coordenadas de campo.

En la figura 3.5 se puede observar que la dirección del vector de flujo rotórico coincide con el eje real del sistema de referencia giratorio, por lo tanto su proyección sobre este eje es máxima y coincide con el módulo del vector (ΦRd = ΦR). El sistema de coordenadas de flujo fue definido de manera que cumpliera siempre esta condición. Cuando la coincidencia del vector y el eje es exacta, se dice que la transformación de coordenadas esta "sintonizada". Como se verá, existen factores que provocan que el sistema pierda su sintonía deteriorando de ese modo su comportamiento dinámico.
Siguiendo el mismo análisis, queda claro que la proyección del vector ΦR sobre el eje imaginario del sistema giratorio es nula (ΦRq = 0)
Entonces, al eliminar ΦRq en las Ecs. 3.12 se obtiene el siguiente modelo matemático del MI.
El ultimo término de la Ec. 3.13.d es la velocidad de deslizamiento WSI entonces una expresión más simple de la 3.13.d es WΦR = WR + WSI.
En la Ec. 3.13.e se observa que la cupla motora referida a
41

coordenadas de flujo es proporcional al producto de isd y ΦRq. En esta expresión sencilla de Td radica la clave del control en coordenadas de campo, ya que tiene la misma forma que la ecuación de cupla de un motor de corriente continua, donde isq se corresponde con la corriente de armadura Rd con el flujo de los polos principales. De esta manera, mediante las variables de entrada isd e isq, se pueden controlar en forma independiente la magnitud del flujo y la cupla motora. En la Figura 3.6 se puede ver que el flujo rotórico es controlado en forma directa por (esto es equivalente al control de flujo en la máquina de corriente continua por medio de la corriente de excitación). En la misma figura se observa que el ángulo de carga S se anula si no hay cupla motora (este concepto fue expuesto en los apartados 1.6 y 3.4).
En este punto conviene recordar un concepto que fue expuesto en el apartado 3.3: si el motor es alimentado por medio de lazos rápidos de control de corriente, las dos primeras ecuaciones del modelo 3.13 no son necesarias en el análisis de la dinámica del motor ya que la corriente de estator queda impuesta por los controladores de alimentación.
El diagrama en bloques de la Figura 3.7 describe la organización del control de un MI en coordenadas de campo.
Las corrientes de referencia en coordenadas de campo a la salida del
bloque de control A, son transformadas a coordenadas de

estator en el bloque B. Esta operación consiste en multiplicar el vector de entrada al bloque por una matriz de cambio de coordenadas P cuyos coeficientes son funciones del ángulo del flujo ρ:
En el bloque F del camino de realimentación, la transformación matricial es equivalente a la descripta:
Luego, en el bloque C, las componentes ortogonales de is se descomponen en un sistema de tres fases separadas 120° entre sí utilizando otra transformación matricial:

En el bloque E se completa un cálculo del mismo tipo sobre la corriente proveniente de los sensores en el motor.
El hecho de realizar la transformación de coordenadas (basada en el ángulo de flujo p) y la conversión de número de fases sobre las señales de referencia, es decir, en el extremo de baja potencia del inversor PWM, es una forma de simplificar el diseño del lazo de control. Sin embargo, deben cumplirse dos condiciones para que el sistema funcione correctamente: el retardo de tiempo del inversor debe ser despreciable y su lazo de control de corriente debe tener ganancia constante (el inversor debe comportarse como una fuente de corriente perfecta).
3.6 Implementación del control en coordenadas de campo
Si las condiciones de transformación de coordenadas se cumplen, se puede obtener una buena performance dinámica del MI utilizando la misma estrategia de control que se aplica a los motores de corriente continua.
La magnitud del flujo ΦR debe ser mantenida en su máximo valor por debajo de la velocidad nominal. para aprovechar toda la capacidad de cupla del motor, y debe disminuirse al aumentar la velocidad por encima de la velocidad nominal de modo de mantener constante el producto Td . wR, es decir, la potencia entregada por la máquina. La relación descripta entre el flujo y la velocidad del rotor se muestra en la Figura 3.8.

En el bloque de control A de la Figura 3.7 deben implementarse dos lazos separados para el control de la cupla motora y el flujo a través de las corrientes isd Ref e iSq Ref. En la figura 3.9 se ha esquematizado el control de velocidad de un MI utilizando las mismas entradas y salidas de que dispone el bloque A de la Figura 3.7.
3.7. Adquisición de la señal de flujo rotórico
Es muy importante mantener una información actualizada de la magnitud y el ángulo de fase de la onda fundamental de flujo rotórico, ya que esta es la base de la transformación de coordenadas que sustenta el Control en Coordenadas de Campo.
El precursor de esta técnica de control, Blaschke [3], obtuvo una medición de la ser al de flujo independiente de la frecuencia utilizando sensores de efecto Hall colocados sobre la cara interna del estator. Interpolando suficientes mediciones obtuvo una estimación de la magnitud y posición del flujo magnético en el entrehierro. Esta idea tiene varias desventajas: los sensores de efecto Hall son elementos delgados y frágiles y no resisten condiciones severas de funcionamiento, vibraciones o cambios bruscos de temperatura. La información obtenida al promediar las mediciones difícilmente sea exacta bajo condiciones dinámicas de funcionamiento. Además, el agregado de

los sensores al motor debe hacerse durante su fabricación, y la técnica no podría aplicarse a motores estándar de bajo costo.
Una alternativa propuesta por Plunkett [4] consiste en el agregado de bobinas especiales para sensar el campo ubicadas en las ranuras del estator. Ante la objeción, ciertamente razonable, de que esta técnica aun requiere máquinas de fabricación especial, se decidió utilizar los arrollamientos del estator como bobinas sensoras. Este método no prosperó por varios motivos, uno de ellos que los resultados que brinda no alcanzan la precisión que requiere un control de buena calidad de respuesta dinámica.
Una aproximación más directa al cálculo de la magnitud y posición de la onda de flujo esta basada en el modelo del motor en coordenadas de campo, específicamente en las Ecs. 3.13.c y 3.13.d. El modelo 3.13 es particularmente útil en esta ocasión a causa de su gran simplicidad y potencial precisión; además, sus salidas son constantes en estado estacionario.
En Ia Figura 3.10 se muestra el contenido del bloque G de la Figura 3.7. El esquema, construido en base a las ecuaciones de equilibrio rotórico del MI (3.13.c-d), tiene como entradas la corriente de estator y la velocidad del rotor y sus salidas son el módulo de ΦR su coordenada angular ρ. El bloque cuya entrada y salida son isd y ΦR respectivamente, contiene la función de transferencia asociada a la Ec. 3.13.c.
El uso del esquema descripto brinda las siguientes ventajas: • Las señales de flujo no están basadas en mediciones directas. • Se pueden utilizar motores estándar sin sensores adicionales.

• El cálculo del flujo es realizable aún a frecuencia cero lo que no se podía hacer con los métodos anteriores.
De todos modos existen algunos problemas que deben ser
solucionados. Por ejemplo, el ángulo ρ se obtiene integrando ΦR; a pesar de que ésta no es una integral continua, este tipo de cálculo es siempre una posible fuente de error.
Otro problema importante es la dependencia del modelo del rotor respecto de la constante de tiempo rotórica TR = LR / RR. Una estimación imprecisa de este parámetro significaría un cálculo erróneo del ángulo ρ, lo que produciría un acoplamiento indeseable entre los ejes d y q del sistema de referencia giratorio. Si esto ocurriera, el control en coordenadas de campo se inutilizaría llegando incluso a inestabilizar el sistema.
El parámetro TR cambia lentamente debido a las variaciones de temperatura del rotor y rápidamente cuando se opera en la zona de debilitamiento de campo (por encima de la velocidad nominal) a causa del efecto de saturación magnética. La máxima desviación de TR puede ser de ± 50% de su valor original. 3.8 Identificación de la constante de tiempo rotórica
Han surgido en los últimos anos muchos esquemas para identificar TR. Como es de esperar, todos tienen ventajas y desventa-jas. Un método al que siempre se hace referencia debido a que fue una de las primeras propuestas serias de solución a este problema, es el de Identificación por Correlación: Se ha dicho que las señales de salida del controlador isdRef e isq Ref realizan un control independiente de la planta en los ejes d y q. Esto es cierto sólo si el ángulo ρ utilizado en el cambio de coordenadas coincide con la posicion real del ángulo p de la onda de flujo. Este método consiste en sumar un ruido de prueba de bajo nivel a la serial isd Ref que se asumio desacoplada de isq Ref. Si a la salida del motor las seriales isd e iSq muestran alguna correlacion del tipo de la esperada para el ruido de prueba, se concluye que el eje estimado de referencia d no es exactamente perpendicular al eje real de referencia q y por lo tanto se cometió un error en el cálculo del ángulo ρ.
47

Si se desprecian otras fuentes de error, corrigiendo adecuadamente el parámetro TR, en el modelo 3.13, deberá anularse la correlación. Una cualidad importante de este esquema es que el signo de la correlación calculada señala la dirección en que se debe modificar a TR. Todo el proceso de identificación de TR, incluyendo la generación del ruido de prueba (ruido binario pseudo-aleatorio), puede ser realizado por el mismo microprocesador que controla el motor con una pérdida de tiempo de cálculo no mayor al 5%. Sin embargo, el sistema tiene una importante desventaja; el tiempo de premediación de las señales necesario para eliminar los ruidos no deseados y obtener así una función de correlación útil, es bastante prolongado y por lo tanto la actualización de TR es muy lenta.
Existen otros métodos de desarrollo posterior al descripto que brindan mayor velocidad y mejor precisión en la estimación sin necesidad de perturbar al sistema con ruidos de prueba. Entre las técnicas de identificación que mayor atención reciben en la actualidad se destacan el Filtro de Kalman y las Redes Neuronales.
3.9 Ventajas del control en coordenadas de campo La estrategia de Control en Coordenadas de Campo es una forma
efectiva de simplificar la compleja estructura de control que requiere un sistema multivariable del tipo del MI. Sus principales ventajas son:
• Acceso directo al flujo y a la cupla, permitiendo control con cupla máxima y debilitamiento de campo.
• Si el ángulo de flujo ρ' es lo suficientemente preciso, el manejo separado del flujo y la cupla mediante la corriente de estator, es valido tanto en condiciones de funcionamiento dinámicas como en estado estacionario.
• En estado estacionario, el sistema maneja valores constantes de las variables de control y esto lo hace robusto frente a los ruidos ajenos a la planta.
48

Sección 4. Simulación de un Motor de Inducción
4.1 Utilidad de la simulación
Una forma conveniente de evaluar la calidad de respuesta de un sistema de dinámica compleja es llevar a cabo una simulación en computadora utilizando el modelo matemático que lo describe. En esta sección se incluye un programa en lenguaje C que se utilizó para simular un MI en lazo cerrado siguiendo el esquema de Control en Coordenadas de Campo que se describe en las Figuras 3.7, 3.9 y 3.10 de la sección anterior.
El programa esta dividido conceptualmente en dos partes. La primera consiste en la simulación del MI propiamente dicho; para completarla se utilizó el modelo matemático 3.10 cuyas ecuaciones están referidas a coordenadas de estator. La segunda parte es el lazo de control del motor y fue realizado en base a las Ecs. 3.13.c-e que están expresadas en coordenadas de campo. Evidentemente, fue necesario realizar una transformación de coordenadas sobre las variables en los mismos puntos que señalan los bloques B y F en la Figura 3.7.
Se debe tener en cuenta que los resultados obtenidos con esta simulación (expuestos en el apartado 4.5) corresponden a un sistema ideal. Cuando se aplique la técnica a un sistema real deberán tenerse en cuenta algunas dificultades que ya fueron mencionadas en la sección anterior:
• Adquisición correcta del modulo y fase de la onda de flujo rotórico. • Actualización de la constante rotórica TR en tiempo real. • Cancelación de los retardos residuales asociados al Inversor PWM.
4.2 Discretización del modelo matemático
Cuando un sistema, cuyo funcionamiento normal implica un flujo continuo de señales, es simulado en una computadora, su modelo matemático necesita ser traducido del campo de las señales continuas al de las señales de evolución discreta. Esta operación, común-
49

mente denominada discretización del modelo matemático, facilita el análisis de la evolución temporal y las cualidades dinámicas del sistema bajo estudio, utilizando bucles de programa cerrados que repiten los cálculos en cada iteración basándose en los valores hallados en el ciclo anterior.
Para realizar estas operaciones es conveniente que las ecuaciones del modelo sean expresadas en forma de espacio de estados [5]. La representación de sistemas en el espacio de estados constituye una herramienta de gran utilidad para el análisis y diseño de sistemas de control en el dominio temporal. En particular resulta de gran significación para el tratamiento de los sistemas multivariables. Esta forma de representación fue desarrollada para el tratamiento de modelos continuos y extendida posteriormente a los modelos discretos en razón de los requerimientos impuestos por el control digital.
Cuando se hace una modelación en el dominio temporal discreto, las funciones temporales continuas pueden expresarse como funciones discretas donde estas toman el valor de la función continua en cada instante de tiempo discreto. Si el intervalo de discretización (denominado comúnmente periodo de muestreo T0) es constante, la función temporal discretizada tomará el valor de la función continua en t = k . To para k = 0, 1, 2, ...
Este periodo de muestreo deberá elegirse teniendo en cuenta el teorema de Shannon, que indica que To debe ser menor o igual que la mitad de la constante de tiempo más pequeña del sistema. Si se cumple esta condición no se perderá la información contenida en las señales continuas al realizar la discretización.
Aplicando la siguiente relación a todas las variables del modelo matemático del motor de inducción 3.10,
y realizando luego algunas combinaciones lineales entre sus ecuaciones, se llega al siguiente modelo matemático discreto del motor de inducción:
50

Los coeficientes de la Ecs. 4.2 son funciones de Lm, LS, LR, RS, R R y del periodo de muestreo To; sus expresiones son las siguientes:
El modelo 4.2 es el encargado de simular el comportamiento del motor de inducción; para realizar el control en coordenadas de campo (control vectorial), el modelo que se debe utilizar es el equivalente discreto del modelo 3.13. A continuación se detallan las ecuaciones discretizadas correspondientes al equilibrio eléctrico en el rotor y al equilibrio electromecánico. Las ecuaciones asociadas al equilibrio estatórico no se utilizan aquí debido a que se supuso que el inversor PWM encargado de alimentar al motor se comporta como una fuente de corriente perfecta; de acuerdo con lo expuesto en la sección
51

anterior, esta condición basta para eliminar las dos primeras ecuaciones en el modelo 3.13.
En el programa del apartado 4.4 se incluye el modelo de un MI de 0.25 kW de potencia con rotor jaula de ardilla que posee los siguientes parámetros:
(Inductancia del arrollamiento estatórico) (Inductancia del arrollamiento rotórico) (Inductancia mutua de los arrollamientos estatórico y rotórico)
(Resistencia de estator)
(Resistencia de rotor)
(Inercia mecánica del conjunto motor-carga)
(Número de polos del arrollamiento estatórico)
El periodo de muestreo utilizado para discretizar las señales durante la simulación es:
4.3 Diagrama de flujo del programa de simulacion
La Figura 4.1 esquematiza la estructura del programa utilizado para simular el comportamiento de un MI funcionando en lazo cerrado bajo Control en Coordenadas de Campo.
52
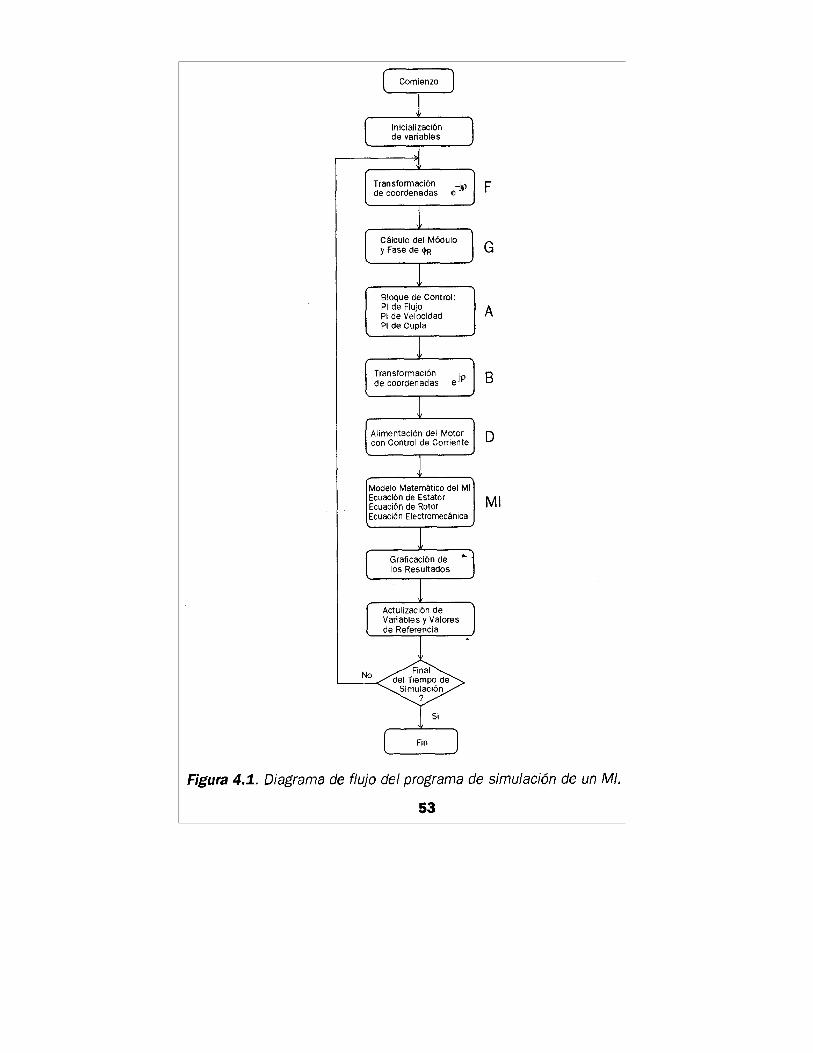

Los cuadros titulados F, G, A, B y D tienen una correspondencia directa con los bloques de la Figura 3.7. Se puede observar que el comienzo del lazo se ha elegido a la salida de los sensores del motor. Las variables sensadas son cambiadas de sistema de referencia en el cuadro F y quedan expresadas en coordenadas de campo. Estos valores son utilizados para reconstruir la señal de flujo rotórico en eI cuadro G aplicando las Ecs. 3.13.c y 3.13.d tal como se detalla en la Figura 3.10 de la sección anterior.
En el cuadro A se han agrupado los controladores de flujo,
velocidad y cupla en una forma similar a la descripta por el esquema de la Figura 3.9; sólo se ha omitido el bloque que contiene la función de debilitamiento de campo y se ha supuesto que el motor trabaja siempre por debajo de su velocidad nominal. Es así que a la entrada del controlador de flujo se utiliza un valor de referencia constante.
En el cuadro B la corriente de referencia de estator es cambiada de coordenadas de campo a coordenadas de estator para ser alimentada por los controladores de corriente del cuadro D en el modelo matemático del motor de inducción (cuadro MI).
El modelo matemático del MI utilizado en esta simulación es bifásico y no trifásico como el de la Figura 3.7; por este motivo los bloques C y E no se incluyen en el diagrama de flujo. El use de un modelo bifásico se justifica debido a que este es equivalente en todo aspecto, desde el punto de vista de la simulación, a uno trifásico.
4.4 Programa
La simulación fue programada en lenguaje C y ensayada en una PC 486 DLC. Los resultados obtenidos para distintas condiciones de carga y comandos de velocidad de referencia, se muestran en la Figura 4.2.
El listado del programa se puede solicitar en AADECA e incluye las rutinas de graficación.
54

4.5 Resultados de la simulación
Se ejecutó el programa mencionado en el apartado 4.4 con los siguientes parámetros:
• Tiempo total de simulación: 1 segundo • Cupla de carga en el arranque: ninguna • Velocidad de referencia en el arranque: Velocidad sincrónica
con la alimentación (w,) • Perturbaciones:
- a los 250 ms: Cupla de carga de 20 N - a los 400 ms: Velocidad de referencia = 150% de ws - a los 650 ms: Velocidad de referencia = -ws
El resultado de la simulación se muestra en la Figura 4.2.
En la Figura 4.2 se observa que la componente de flujo rotórico ΦR se mantiene constante una vez que alcanza su valor de referencia. Un detalle interesante es que el ángulo de flujo cambia de signo al invertirse el sentido de marcha del rotor.
En esta simulación se utilizó un valor de corriente máxima de estator exageradamente grande (100 Amperes) con la intención de distinguir con claridad la evolución de otras variables, como el ángulo de flujo. Sin embargo, se debe tener en cuenta que un valor tan grande de is implica una distorsión de las cualidades dinámicas del motor. Si se ejecuta el programa con valores reales de corriente y carga, es posible obtener la calidad de respuesta real del MI. Por ejemplo, fijando la saturación de i, en 10 Amperes e incluyendo una cupla de carga de 5 N, el tiempo que tarda la máquina, a partir del arranque, en alcanzar la velocidad sincrónica es algo menor a 1 segundo.
56

Apéndice A: Nomenclatura
Constantes:
Sistema de referencia solidario al estator. Sistema de referencia giratorio, solidario al flujo rotórico. Área de la espira en el rotor elemental (A = I . d).
Inercia mecánica del conjunto motor-carga.
Constante asociada a la cupla motora; es función de las dimensiones físicas del rotor y del número de espiras de su bobinado. Inductancia de los bobinados estatórico y rotórico. Resistencia de los bobinados estatórico y rotórico. Impedancia de una espira en el rotor elemental.
Variables:
Campo magnético estatórico. Tensión inducida en una espira del rotor y su valor máximo. Fuerza magnetomotriz (Fmm) de cada fase del bobinado trifasico estatórico. Fuerza magnetomotriz Fmm estatórica resultante de la com- posición vectorial de f1.2 y 3' Frecuencia de la corriente en el estator y en el rotor.
Vectores de corriente de estator y rotor. Vector de corriente de estator en coordenadas de campo.
Componentes ortogonales de la corriente de estator en coordenadas de estator. Componentes ortogonales de la- corriente de estator en coordenadas de campo.
Matriz de cambio de coordenadas de campo a coordenadas de estator. Deslizamiento.
Cupla motora.
Cupla de carga.
Vector de tensión de estator.

Velocidad tangencial de una espira rotórica Tensión y corriente directas en el lazo intermedio del convertidor. Velocidad angular absoluta del rotor. Velocidad angular del vector de corriente estatórica. Velocidad de deslizamiento.
Velocidad angular del vector de flujo rotórico. Flujo magnético a través de la espira en el rotor elemental. Flujo rotórico máximo.
Vector de flujo rotórico en coordenadas de estator y su conjugado. Vector de flujo rotórico en coordenadas giratorias de campo y su conjugado. Componentes ortogonales del flujo rotórico en coordenadas de estator. Componentes ortogonales del flujo rotórico en coordenadas de campo. Coordenada angular del vector iR respecto de un sistema de referencia fijo en el estator. Coordenada angular del vector iR respecto de un sistema de referencia giratorio, solidario al rotor. Coordenada angular del vector iS respecto de un sistema de referencia fijo en el estator. Coordenada angular del vector iS respecto de un sistema de referencia giratorio, solidario al flujo rotórico. Posición angular absoluta del rotor respecto del estator. Coordenada angular del vector ΦR respecto de un sistema de referencia fijo en el estator. Rendimiento del motor.
58

Apéndice B. Bibliografía [1] Leonhard, W. (1990). "Control of Electrical Drives". Berlin, Sorinoer-Verlag,
capítulos 10-11-12. [2] Hasse, K. (1969). "Zur Dynamik drezahlgeregelter Antriebe mit
stromrichtergespeisten Asynchron-Kurzschlusslaufermotoren". Diss.TH Darmstadt.
[3] Blaschke, F.(1972). "The principle of field orientation as applied to the new Transvektor closed loop control system for rotating field machines". Siemens Review.
[4] Gabriel, R. and Leonhard, W. (1982). "Microprocessor control of induction motors". IEEE Int. Semiconductor Power Conversion. Conf. IPEC Orlando, Florida, May 1982.
[5] Kuchen, Benjamin y Carelli, Ricardo (1994). "Control Digital Directo". Facultad de Ingeniería, Universidad Nacional de San Juan, Argentina.
59