Embed Size (px)
Citation preview

A random obstacle-based mobility model fordelay-tolerant networking
Di Wu1,2,*, Juanjuan Li1 and Jiangchuan Liu2
1School of Computer Science, Dalian University of Technology, Dalian, China2School of Computer Science, Simon Fraser University, Vancouver, BC, Canada
SUMMARY
When evaluating a new protocol in the network, it is important to use a realistic mobility model to reflectthe actual performance of a mobile system. Only the realistic mobility model can better mimic the realityand get more reliable data. However, most existing mobile models of delay-tolerant networking (DTN)move randomly or on the road according to some rules under the environment without obstacles. Thesemobile models, without considering the impact of obstacles on the node, do not accord with the fact. Toaddress this problem, we propose a random obstacle-based mobility model (ROM) aimed at better simu-lating the real trajectory of a human for DTN in the presence of obstacles. In this model, we can placearbitrary-shape obstacles in accordance with any actual scene, as well as considering the influence ofobstacles on the signal. The mobile path of a node calculated by this node is the shortest path to thedestination avoiding certain types of obstacles. In addition, the propagation model contains the attenuationof the signal due to the existence of obstacles. As a result, we have developed a complete obstacle mobilitymodel which is more suitable for studying the performance of the network. We augment the ‘opportunisticnetwork environment’ (ONE) simulator of DTN with required extensions and show that characteristics ofthe DTN are very different using the new model than it is under models that ONE currently provides.Copyright © 2011 John Wiley & Sons, Ltd.
Received 31 May 2011; Accepted 31 May 2011
1. INTRODUCTION
Delay-tolerant networking (DTN) [1] is steadily gaining popularity in the research community for itsability to provide connectivity, or a semblance of connectivity, in ‘challenged’ networking environ-ments. DTN is a network model abstracted from ad hoc, wireless sensor networks (WSN) and otherself-organizing wireless networks. Its typical characteristic is that the link between nodes is intermit-tently interrupted and usually the interruption lasts longer, so that at any time the path between thesource node and destination node may not exist [2]. This means that the network topology of DTNchanges more rapidly. The network experiences frequent and long-duration partitions due to sparsedistribution and frequent movements of nodes. Therefore, the core mechanism of DTN routing isstore-and-forward [3–6], where a source node forwards messages to intermediate nodes moving intoits transition radio coverage. Meanwhile, these intermediate nodes store the received messages andforward them when an appropriate forwarding opportunity rises. The main objective of DTN routingis to maximize the message delivery rate [7].
DTN is mainly used in certain extreme cases, such as wildlife tracking, military networks, disasterrecovery and emergency response systems and so on. Obviously, if we test the performance of thenetwork protocol in a real scenario, it is either very expensive or impossible. Therefore, simulationseems particularly important. Simulation provides an environment with specific advantages over
*Correspondence to: Di Wu, A831 School of Computer Science, Dalian University of Technology, Dalian, China.E-mail: [email protected]
INTERNATIONAL JOURNAL OF NETWORK MANAGEMENTInt. J. Network Mgmt 2011; 21: 326–339Published online in Wiley Online Library (wileyonlinelibrary.com) DOI: 10.1002/nem.793
Copyright © 2011 John Wiley & Sons, Ltd.

real-world studies. These advantages include repeatable scenarios, freedom from risk, low cost andisolation of parameters. Because of these benefits, simulation has become a popular tool for thedevelopment and study of DTN routing protocols.
Ari Keranen and Jorg Ott presented the opportunistic network environment simulator (ONE-V1.0)[8–10], which provides a powerful tool for generating mobility traces, running DTN messagingsimulations with different routing protocols, and visualizing simulations interactively in real time andresults after their completion. In this paper, we use ONE-V1.2.0 in our simulation.
Important components of DTN simulators are the movement pattern of nodes. The mobile modelspecifies how the locations, velocities and destination of nodes change over time [11,12]. For thisreason, the mobile model will indirectly affect network performance [12–15], such as networkconnectivity, average path length, average latency and link lifetime. However, these parameters havean immediate impact on the goal of DTN, which is to maximize message delivery rate. In short, it isimportant to develop a realistic mobility model.
Many DTN mobility models have been proposed. However, these widely used models are mostlyrandom and phantasmagoric [16]. These patterns may be very different from actual movement patternsfound in the real world [14,16,17]. Their common denominator is to create random uncorrelatedmovement across unobstructed domains. Many papers make use of the Random Waypoint mobilitymodel, which is not the best interpretation of node movement since real nodes rarely behave in acompletely random fashion [15,16]. In fact, whether on campus, on the city roads or in an earthquakezone, people move neither randomly nor in the environment without obstacles. Usually, they choose aparticular destination, and then follow a well-planned path to the destination. In the DTN applicationenvironment, the obstacles are most likely buildings, mountains, rivers, etc.
In this paper, to address the problems and issues discussed above, a more realistic mobility modelis presented, i.e. the Random Obstacle-based Mobility (ROM) model, which contains the obstacles,calculation of nodes’ path and attenuation of signal due to the obstacles. In this proposed model, nodesare distributed randomly in the network area initially. Each node then chooses a destination, forsimplicity here, with random selection. After that, the node calculates to the shortest path to itsdestination bypassing the obstacles along their vertices. The node will stop at the destination for acertain time to handle events happened there, and then continue to select a destination, repeating theabove steps. During this period, while sending messages between nodes, first the power of thereceiving signal according to the two-ray ground formula is calculated, and then, whenever the packetencounters an obstacle during transmission, the power of its signal is reduced by some value. Once thepower is smaller than a certain threshold, then this connection is dropped. By this means, we realizethe simulation of the attenuation of signal in ONE [8–10].
We have extended the HUMO (Human Mobility Obstacle) model [18,19] and developed a muchmore complete and realistic mobility model for DTN. Our specific contributions in this paper are thefollowing:
• In the ONE simulator of DTN, we have added the signal propagation model to realize theattenuation of signal due to obstacles.
• In our model, we have simulated the trajectory of a human in reality, to calculate the shortest pathto the destination, bypassing obstacles along their vertices.
• In the ONE simulator, we have added some code to calculate the average number of connectionsper node in a certain time and the average lifetime per link for any mobility model. As a result,the parameters for evaluating DTN in the ONE simulator are more complete.
• Last but not the least, in the ROM model the obstacles are allowed to be irregular polygons.Therefore, obstacles can be simulated according to their actual shapes, but not approximated toa rectangle. Moreover, they can be placed in accordance with their actual direction and location.
In order to evaluating our model, we first compare it with the HUMO model and point out itsdeficiencies. As for Random Waypoint (RWP), despite some known problems in its early use [16], itis still one of the most widely used mobility model for DTN simulations. Finally, we study severalperformance parameters under ROM and RWP respectively using an epidemic routing protocol[20,21]. Simulation results show that obstacles have a great influence on the characteristics of theDTN.
A RANDOM OBSTACLE-BASED MOBILITY MODEL FOR DELAY-TOLERANT NETWORKING 327
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

The rest of the paper is organized as follows. In Section 2 we describe related work in the mobilitymodel of DTN. In Section 3 we describe in detail the proposed movement model. Section 4 providesa comparison with HUMO. Section 5 explains how the model is implemented using ONE and presentsthe results of simulation that highlight the difference in DTN behavior as a function of the mobilitymodel. Section 6 concludes the paper.
2. RELATED WORK
With the study of DTN routing protocols based on a mobility model, a wide variety of mobility modelshave been proposed to try and capture more realistic movement patterns based on anticipated sce-narios. Many of the models attempt to capture the social patterns of human mobility, while othersexplore transportation systems and animal mobility [14,15,22–25,36].
When a node uses the RWP movement model [15,17,26,27,37], it is given a random coordinate inthe simulation area. The node moves directly to the given destination at constant speed, pauses for awhile, and then gets a new destination. This continues throughout the simulations and nodes movealong these zig-zag paths. The literature [16,28] includes studies of the properties of RWP. Severalvariations have been proposed [29–32]. In the random walk mobility model, each node randomlychooses speed and direction in constant time intervals without setting a destination.
Saha and Johnson [33] used detailed street maps to model vehicle automobile traffic. Map-basedmovement models constrain the node movement to predefined paths. In this way, cars can be preventedfrom driving indoors or on pedestrian paths. It initially distributes the node between any two adjacentmap nodes and then nodes start moving from one adjacent map node to another.
Jetcheva et al. [34] used the actual mobility traces of a fleet of city buses running their standard routes.A route-based movement model (MapRouteMovement) can be used to model nodes that follow certainroutes, e.g. bus or tram lines. Only the stops on the route have to be defined and then the nodes using thatroute move from stop to stop using shortest paths and stop at the stops for the configured time.
The Working Day Movement model [23] is a more sophisticated model, which adds a timescale toswitch between sub-mobility models and locations for home, work and evening activities. A variety oftransportation methods are available between the locations as well.
Lindgren et al. [22] propose a community modeled as a set of grid positions that nodes switchbetween, with a home grid position assigned to each device and a central gathering grid common to alldevices; nodes move primarily between home and the central gathering place.
The Community-Based Mobility model [24] represents the social dynamics between hosts as a graphwith weighted edges indicating the strength of interaction between hosts and determines movementbetween grid positions based on the affinity to interact with the hosts currently located there.
The Obstacle Mobility (OM) model [35] models the obstructions that exist in the environment. Itmodels not only movement constraints but also propagation impairments due to the presence ofobstacles. This model supports movement in campus like environments with nodes following pre-defined paths connecting a limited set of points in the network area. These paths and points are definedfrom a Voronoi diagram constructed based on the obstacles’ positions in the simulation area.
The Human Mobility Obstacle (HUMO) [18,19] model extends the OM model [35]. In this mode,the nodes of the network move around the obstacles in a natural and realistic way, but do not limit thenodes moving on the defined road. However, there are still some deficiencies, introduced in Section 4.
3. ROM MODEL
The ROM model is suitable for simulating such a network environment including intelligent nodes andobstacles. In such a network environment, the obstacles can be buildings, mountains and rivers, as wellas high-rise blocks in the city. They not only block the movement of nodes, but also cause attenuationof wireless signal transmitting between nodes.
In the ROM model, the user can design the locations, shapes and sizes of obstacles. Our model canhandle arbitrary shapes and positions for the objects, allowing us to model many real-world terrains.
328 D. WU, J. LI AND J. LIU
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

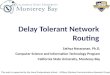
In the ONE simulator of DTN, we add the ROM model to the movement model of nodes. Users candesign the obstacles by using the drawing tool OpenJUMP, which generates graphics files where thecoordinates of obstacles are imported in the ONE to define obstacles. When we use the ROM model forall nodes, they will move around all the obstacles, choosing the shortest path to destinations. Luckily,the ONE simulator is a visualization tool which depicts the movements of the produced scenario’snodes within the network area in the presence of obstacles. Therefore the real-time trajectory of thenodes can be watched by the users at any time. Figure 1 shows such a visualization.
Just as other movement models, the ROM model contains three components. The first component isdestination selection, in which we can choose based on event triggers or uniform distribution. Thesecond component of our mobility model is the movement of the nodes, which is how the node movesto the destination after selecting it. The third component of our model is a propagation model, whichsimulates signal distortion passing through the obstacles. We discuss these in detail below.
3.1. Destination selection
In our model, the destination of each node is selected according to uniform distribution. After selectingthe destination, the node moves according to the method below to the destination with random velocityin a given range. Then the node stops at the destination for a random time interval, followed by a newdestination selection and a new movement. This process continues until the end of the simulation time.The above selection is similar with RWP [15,17,26,27].
The difference, however, is that the destinations must be outside of obstacles; moreover, the nodecannot go through the obstacles. In this way, compared with RWP, the area of node movement in our
Figure 1. An example of visualization of a mobility scenario. The irregular polygons mimic randomobstacles. The circle around each node stands for the transmission range. The curve shows the
trajectory of node N9.
A RANDOM OBSTACLE-BASED MOBILITY MODEL FOR DELAY-TOLERANT NETWORKING 329
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

model is highly constrained. As a result, the distribution of nodes becomes much denser in oursimulation with the ROM model, which also suggests the simulation results in DTN.
Obviously, the destination selection certainly can be reality based rather than random, such as eventtriggered. In the disaster area, medical workers move to the destination in the following way. If theyreceive a distress signal or some other special signal from a place while moving, and in addition thecurrent task is more urgent than the original task, then they change the destination to the place wherethe current task is happening. Hence, with this mechanism, it is suitable to handle an emergency onthe basis of the prioritization of tasks, which is more realistic. However, for simplicity of simulation,the destination is uniformly distributed in the network area.
3.2. Node movement
After selecting the destination, the node moves to it using some movement mechanism. In our model,the node chooses the shortest path to the destination bypassing the obstacles. The details are as follows:
1. Constructing the matrix of a line-of-sight graph.The obstacles are composed of vertices and edges in the ROM model. Therefore there are twotypes of relationship between any two nodes. One belongs to the same obstacle. The otherbelongs to different obstacles. Set all the vertices of obstacles, the source node and destinationnode as the vertices checked in the above step. Then the matrix of the line-of-sight graph Dist[][]can be obtained following Algorithm 1.
2. Using Dijkstra to get the shortest path between the source node and destination node.
Taking advantage of the traditional Dijkstra algorithm and the matrix of the line-of-sight graph Dist[][]obtained in step 1, the shortest path path[] between the source node and the destination node can beobtained.
3.3. Propagation model
One of the primary limitations of the performance of wireless networks is the significant attenuationand interference experienced by a radio signal as it propagates from the sending node to the receivervia non-line-of-sight propagation mechanisms, such as reflection, diffraction and scattering. Someattenuation results are shown in Table 1 [35], which lists the attenuation values when the signal travelsthrough single and double walls. Since a radio signal always travels into and out of the obstacles, there
Algorithm 1. Compute the matrix of the line-of-sight graph, where Dist[][] is the required matrix
if (The vertices V[i] and V[j] belong to the same obstacle k){
if (V[i] and V[j] are adjacent vertices)Dist[i][j] = Euclidean distance of V[i] and V[j];
else if (The edge composed of V[i] and V[j] does not intersect with any obstacles and the vertices onthisedge are all outside the obstacle k)Dist[i][j] = Euclidean distance of V[i] and V[j];
elseDist[i][j] = •;
}else{
if (The edge composed of V[i] and V[j] intersect with an obstacle)Dist[i][j] = •;
elseDist = Euclidean distance of V[i] and V[j];
}
330 D. WU, J. LI AND J. LIU
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

must be at least a double wall. Consequently, in our model, when a signal propagates through anobstacle, it suffers an attenuation randomly taken from a uniform distribution between 40 and 80 dB.
4. COMPARISON WITH HUMO MODEL
4.1. HUMO model
In the HUMO model, every node follows a recursive process in order to reach the destination point[18,19]. If there is an unobstructed line of sight connecting the node with the destination, the nodefollows this direct line to get to the desired destination. If there is an obstacle in the way, the node setsas its next intermediate destination the vertex of the obstacle’s edge, the first edge obstructing thesource node to the destination node which is closest to the destination, and repeats the same processover again with starting point its initial position and destination the chosen vertex. This is repeateduntil an unobstructed direct line until the current destination is found. The whole process is recursivelyexecuted until the destination is reached.
However, there are some inadequacies in HUMO model, as follows.
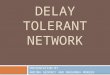
1. The HUMO model is correct only if the obstacles are rectangular and is unsuited to obstacles ofirregular shape. However, the shapes of obstacles are protean in our life and not pure rectangles.If we approximate the shapes of obstacles to rectangles, this is not realistic enough to simulatereal life. As a result, it is more significant to study obstacles with random shapes. Figure 2 showsthat the HUMO model is not suited to obstacles with irregular shapes and the blue line is the pathobtained by the HUMO model. Obviously, this path is unrealistic because of travelling throughthe obstacle. By contrast, the red path is obtained by our ROM model.
In Figure 2, the node u located at point s has set as its destination point d. The HUMO model,checking if the direct line connecting s to d is unobstructed, realizes that obstacle P is in the way.From the vertices of the edge (P1, P2), which is the first one obstructing node u’s path to pointd, the one closest to d is P2. Therefore, P2 is set as the next intermediate destination. In order to
Table 1. Power attenuation values.
Home Office
Single wall 6–20 dB 6–20 dBDouble wall 40–50 dB 50–60 dB
Figure 2. An example of obstacles with irregular shapes.
A RANDOM OBSTACLE-BASED MOBILITY MODEL FOR DELAY-TOLERANT NETWORKING 331
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

reach P2 node u repeats the same process with s as its starting point and P2 as destination. Werealize that P2 can be reached directly. Then P2 is set as starting point and d as destination.Obviously, obstacle P is still in the way and the edge (P3, P4) is the first edge obstructingnode u’s path to node d. The vertex closest to d is P4. Then P4 is set as the next intermediatedestination. From Figure 2, there is no obstructing edge between P2 and P4. Then the nodemoves to P4 directly. However, this is not practical because the node has traveled throughobstacle P. The subsequent path can be obtained following the above recursive process.
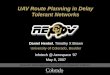
2. Even if the obstacle is rectangular, the path calculated by the HUMO model is still not the besta person moving in such an areas can achieve. Similarly, the path labeled with a blue line inFigure 3 is not the best. Clearly, in this case, the person has ignored what is near and sought whatis far away. In contrast, the red path is much better.
3. Finally, the HUMO model does not specify how the node moves when two nodes are the samedistance from the destination. Different choices lead to different paths.
4.2. ROM model
In our model, all we need is to input all the vertexes of obstacles, the source node and destination nodeto construct the matrix of the line-of-sight graph, then calculate the shortest path according toDijkstra’s algorithm. Also, it is the best a person moving in an area can do. However, in our model, wemust have the exact map of the network area.
Compared with the HUMO model, the ROM model has the following advantages.
1. It is suitable for random obstacles, including those with irregular shape. This point is shown tobe true in Section 5.
2. No matter how obstacles are placed, we always find the shortest path which is the best a personmoving in an area can do.
3. The algorithm in our model is much more robust.
5. SIMULATION
The primary objective of our simulations is to understand the impact of obstacles in a simulationenvironment. To this end, we evaluate several metrics that affect the performance of DTN routingprotocols greatly and compare the ROM model with widely used RWP model.
Figure 3. A special case in which the node selects a point far way from the destination in theHUMO model.
332 D. WU, J. LI AND J. LIU
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

First, to evaluate the characteristics of the network topologies created by the two mobility models,we calculate the average number of connections per node during a period of time, i.e. the averagenumber of connections each node creates with other nodes during a period of time in the network. Aswe know, in DTN, if a node has a greater opportunity to connect with other nodes, then it forwards themessages successfully with a higher possibility. Therefore, this metric has a large impact on the result.
Second, the average lifetime per link is defined as the average time of a connection from creation todestruction. Similarly, the longer a connection lasts, the greater the message delivery rate is.
Third, the average number of hops per packet is the number of transmissions required for eachpacket to be transmitted to its destination. It is affected by the network topology and also reflects theperformance of routing protocols.
Fourth, the average delay is defined as the time that a packet is sent by the node it originates from,until it reaches its destination.
Finally, the message delivery rate is taken to be the ratio of the number of received packets as theirdestinations over the number of the packets originally sent during the simulation time. It is the primarymetric evaluating the routing protocol. Certainly, there are many factors that affect it, such as thenetwork topology and routing protocols.
5.1. Extension to ONE
We extended the ONE simulator [8–10], which is widely used in the DTN community. ONE is a highlycustomizable communication network simulator for DTN that has several movement models imple-mented that import map data and constrain entity movement to the streets and roads of the importeddata. ONE can also visualize the imported map and entity movement using a GUI, which helps validatethe model in an intuitive way.
We added a new obstacle movement model to ONE, extending ONE’s movement model. The newlyadded movement class to ONE is obstacleMovement.
ONE is written in Java. Each movement model is implemented as a class which implements thegeneric MovementModel interface. The interface MovementModel has two abstract methods that anyextended class must override.
public abstract class MovementModel {public abstract Coord getInitialLocation();public abstract Path getPath();
}
The method getInitialLocation returns a new initial placement for a node, while getPath returns a newpath by this movement model or null if no new path could be constructed at the moment. A particularmovement model has to override these two methods depending on what specific computation thatmodel needs to make.
In the ROM model, most of the code achieving the obstacle-bypassing functionality is added to theclass obstacleMovement, overriding the above two methods. In addition, we rewrite the methodisWithinRange(DTNHost anotherHost) for the class NetworkLayer to achieve the propagation model.Only when the receiving power of radio signal is greater than the threshold can we create connections.In order to output the average number of connections of each node, we add a member variableconnectionNumber to the class DTNHost, then in the method createConnection() of the class Net-workLayer, the member variable connectionNumber of the two nodes of a connection are bothincreased by one. For the sake of obtaining the average lifetime of each link, in the same way, throughadding a member variable connectionCreatTime to the class Connection, at the same time, in themethod removeConnectionByIndex() of the class NetworkLayer, we calculate the lifetime per link.Finally, these two metrics are calculated and printed in the method updateHosts() of the class World.
5.2. Configuration parameters
In our simulation environment of DTN, we use 20 nodes to move according to each of the RWP andROM mobility models within an area of 1500 m ¥ 1500 m dimensions under an epidemic routingprotocol. The simulation parameters are set as in Table 2.
A RANDOM OBSTACLE-BASED MOBILITY MODEL FOR DELAY-TOLERANT NETWORKING 333
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

Table 2. List of the mobility models’ parameters.
Parameter Value
bufferSize 5MtransmitRange 10 mtransmitSpeed 250kwaitTime 0, 120speed 0.5, 1nrofHosts 20Message sizes 500 kB–1 MBworldSize 1500, 1500Router Epidemic router
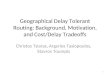
Figure 4. Simulation diagram of the ROM model. The red line is the trajectory of node P12.
334 D. WU, J. LI AND J. LIU
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

In the ROM model, we import the campus map of Dalian University of Technology, in which theshape and position of obstacles are designed according to the teaching buildings and student apartmentbuildings, as shown in Figure 4.
We simulate for 100k seconds every test, while each value in the figures below is the average of 10executions with different seeds.
5.3. Results
Figure 5 illustrates the average number of connections per node. Obviously, the RWP model has farfewer connections than the ROM model. As a matter of fact, this result is entirely predictable. In theROM model, all nodes move around the vertices of the obstacle; therefore, the chance of nodesmeeting in the vicinity of obstacles’ vertexes is greatly increased. Although the obstacles block thespread of the signal, the transmitting range is only 10 m [10] in our simulation environment; thus it is
Figure 5. Average number of connections per node.
Figure 6. Average link lifetime per connection.
A RANDOM OBSTACLE-BASED MOBILITY MODEL FOR DELAY-TOLERANT NETWORKING 335
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

not sufficient to reduce the number of connections in the ROM model. Conversely, in the RWP model,all nodes move randomly and a node does not have any relationship with other nodes. As a result, nodesrarely meet each other.
The effect of the mobility characteristics on the link duration between pairs of nodes is shown inFigure 6. It can be observed from this figure that it is lower in RWP and grows with the increase of thenumber of nodes both in RWP and ROM. Clearly, it is affected by the density of nodes in the network.This result can be attributed to the more restricted region of nodes due to nodes being unable to gothrough obstacles. However, in RWP, nodes can move within the entire network region with morerandomness. Thus the density of nodes in the ROM model is higher than in the RWP model, whichleads to a higher link lifetime.
In Figure 7 it can be observed that the RWP model achieves a far smaller average number of hopsthan ROM. The presence of the obstacles makes the packets follow longer routes towards their
Figure 7. Average packet delivery hop count.
Figure 8. Average packet delivery delay.
336 D. WU, J. LI AND J. LIU
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

destinations. The usage of epidemic routing, in which all messages are forwarded to all encounteringnodes, is also a reason. The more the connections, the more forwarding nodes there are. Therefore thisbehavior results in more hops in the ROM model.
Figure 8 shows the average packet delivery delay. The network under the ROM model performssignificantly better than in the RWP model, which can be attributed to the better network connectivityof ROM. In this model, nodes send messages to the next hop much faster. As a result, it can only causea shorter delay.
In Figure 9 the packet delivery ratio of the network under all the mobility models is illustrated.Obviously, when the ROM model is used, the percentage of delivered packets is higher than in theRWP model. We all know that better network connectivity will most likely lead to higher data packetdelivery in DTN. The ROM model is just an example that has better network connectivity, as showedin Figures 5 and 6. Meanwhile, we can get some inspiration from this result; that is, through designingthe path for the nodes of DTN, such as the movement of nodes in our model, we can achieve a highermessage delivery rate.
6. CONCLUDING REMARKS
In this paper, the proposed ROM model aims to better simulate the real trajectory of a humanfor DTN in the presence of obstacles. Primary examples of such scenarios are emergency situ-ations like earthquakes, military networks and fires. The real-life properties of movement insuch environments are captured by the ROM model. Moreover, the model extends the shape andposition of the obstacles and studies the best path that a node can take to reach the destina-tion in the presence of physical obstacles that affect both node movement and radio signalpropagation.
We also get some inspiration from our simulation; that is, how we can design better movement forDTN nodes to obtain a higher message delivery rate. The movement of nodes in the ROM model, forexample, can achieve better results than the RWP model.
Finally, we have to point out that some specific values obtained in our simulation are stronglydependent on the configuration of the obstacles in the network terrain. However, the data lead to anaccurate conclusion. As a result, to discern the overall performance of the routing protocol, it is betterto conduct many simulation experiments over a wide range of scenarios.
Figure 9. Packet delivery rate.
A RANDOM OBSTACLE-BASED MOBILITY MODEL FOR DELAY-TOLERANT NETWORKING 337
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

ACKNOWLEDGEMENTS
This work is supported by the Open Research Fund from the Key Laboratory for Computer Networkand Information Integration (Southeast University), Ministry of Education, China.
REFERENCES
1. Fall K, Farrell S. DTN: an architectural retrospective. IEEE Journal on Selected Areas in Communications 2008; 26:828–836.
2. Fall K. A delay-tolerant network architecture for challenged internets. In ACM SIGCOMM, Karlsruhe, Germany, 2003;27–34.
3. Chuah M-C, Yang P, Davison BD, Cheng L. Store-and-forward performance in a DTN. In IEEE 63rd Vehicular TechnologyConference, 2006; 187–191.
4. Hou F, Shen X. An adaptive forwarding scheme for message delivery over delay tolerant networks. In Global Telecom-munications Conference, IEEE GLOBECOM, 2009; 1–5.
5. Wang R, Wu X, Wang T, Taleb T. Experimental evaluation of delay tolerant networking (DTN) protocols for long-delaycislunar communications. In Global Telecommunications Conference, IEEE GLOBECOM, 2009; 1–5.
6. Guo H, Li J, Qian Y. Hop-DTN: modeling and evaluation of homing-pigeon-based delay-tolerant networks. IEEE Trans-actions on Vehicular Technology 2010; 59: 857–868.
7. Jain S, Fall K, Patra R. Routing in a delay tolerant network. In ACM SIGCOMM, 2004; 145–158.8. Keranen A, Ott J. Increasing reality for DTN protocol simulations. Technical report, Helsinki University of Technology,
Networking Laboratory, July 2007.9. ONE simulator (2008). Available: http://www.netlab.tkk.fi/tutkimus/dtn/theone/ [12 June 2010].
10. Keranen A, Ott J, Karkkainen T. The ONE simulator for DTN protocol evaluation. In SIMUTools ’09: Proceedings of the2nd International Conference on Simulation Tools and Techniques, ICST: Brussels, 2009.
11. Lin G, Noubir G, Rajmohan R. Mobility models for ad hoc network simulation. In Proceedings of the 23rd Conference ofthe IEEE Communications Society, INFOCOM, 2004; 453–463.
12. Wang W, Guan X, Wang B, Wang Y. A novel mobility model based on semi-random circular movement in mobile ad hocnetworks. Information Sciences 2010; 180: 399–413.
13. Bettstetter C. Topology properties of ad hoc networks with random waypoint mobility. ACM SIGMOBILE MobileComputing and Communications Review 2003; 7: 50–52.
14. Camp T, Boleng J, Davies V. A survey of mobility models for ad hoc network research. Wireless Communications andMobile Computing, Special Issue on Mobile Ad Hoc Networking: Research, Trends and Applications 2002; 483–502.
15. Jardosh AP, Belding-Royer EM, Almeroth KC, Suri S. Toward realistic mobility models for mobile ad hoc networks.In ACM MOBICOM, 2003; 217–229.
16. Yoon J, Liu M, Noble B. Random waypoint considered harmful. In 22nd Annual Joint Conference of the IEEE Computerand Communications Societies (IEEE INFOCOM), 2003; 1312–1321.
17. Yoon J, Liu M, Noble B. Sound mobility models. In Proceedings of the Ninth Annual International Conference on MobileComputing and Networking, ACM Mobicom, 2003; 205–216.
18. Papageorgiou C, Birkos K, Dagiuklas T, Kotsopoulos S. An obstacle-aware human mobility model for ad hoc networks. InModeling, Analysis and Simulation of Computer and Telecommunication Systems, MASCOTS, 2009; 1–9.
19. Papageorgiou C, Birkos K, Dagiuklas T, Kotsopoulos S. Simulating mission critical mobile ad hoc networks. In Interna-tional Workshop on Modeling Analysis and Simulation of Wireless and Mobile Systems, 2009; 143–150.
20. Vahdat A, Becker D. Epidemic routing for partially connected ad hoc networks. Technical Report CS-2000-06, DukeUniversity.
21. Spyropoulos T, Psounis K, Raghavendra CS. Efficient routing in intermittently connected mobile networks: the multiple-copy case. IEEE/ACM Transactions on Networking 2008; 16: 77–90.
22. Lindgren A, Doria A, Schelen O. Probabilistic routing in intermittently connected networks. ACM SIGMOBILE MobileComputing and Communications Review 2003; 7: 19–20.
23. Ekman F, Keränen A, Karvo J, Ott J. Working day movement model. In ACM/SIGMOBILE Workshop on Mobility Modelsfor Networking Research 2008; 33–40.
24. Musolesi M, Mascolo C. A community based mobility model for ad hoc network research. In MOBIHOC InternationalSymposium on Mobile Ad Hoc Networking and Computing 2006; 31–38.
25. Vellambi B, Subramanian R, Fekri F, Ammar M. Reliable and efficient message delivery in delay tolerant networks usingrateless codes. In Proceedings of MobiOpp, 2007; 91–98.
26. Chu T, Nikolaidis I. On the artifacts of random waypoint simulations. In Proceedings of the First International Workshopon Wired/Wireless Internet Communications (WWIC2002), in Conjunction with the International Conference on InternetComputing, 2002; 69–76.
27. Gowrishankar S, Basavaraju TG, Sarkar SK. Effect of random mobility models pattern in mobile ad hoc networks.International Journal of Computer Science and Network Security 2007; 7: 160–164.
28. Bettstetter C, Wagner C. The node distribution of the random waypoint mobility model for wireless ad hoc networks.IEEE Transactions on Mobile Computing 2003; 2; 257–269.
338 D. WU, J. LI AND J. LIU
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem

29. Chiang C-C, Gerla M, Zhang L. Shared tree wireless network multicast. In Computer Communications and Networks(ICCCN), 1997; 28–33.
30. Hong X, Gerla M, Pei G, Chiang C-C. A group mobility model for ad hoc wireless networks. In ACM InternationalWorkshop on Modeling, Analysis and Simulation of Wireless and Mobile Systems, 1999; 53–60.
31. Nayebi A, Rahimi MR, Azad HS. Analysis of time-based random waypoint mobility model for wireless mobile networks.In Proceedings of the International Conference on Information Technology, 2007; 42–47.
32. Bettstetter C, Wagner C. The spatial node distribution of the random waypoint mobility model. In German Workshop onMobile Ad Hoc Networks (WMAN), 2002.
33. Saha AK, Johnson DB. Modeling mobility for vehicular ad-hoc networks. In Proceedings of the First ACM InternationalWorkshop on Vehicular Ad Hoc Networks, 2004; 91–92.
34. Jetcheva G, Hu YC, Chaudhuri SP, Saha AK, Johnson DB. Design and evaluation of a metropolitan area multitier wirelessad hoc network architecture. In Proceedings of the Fifth IEEE Workshop on Mobile Computing Systems and Applications,WMCSA, 2003; 32–43.
35. Jardosh A, Belding-Royer E, Almeroth K, Suri S. Real-world environment models for mobile network evaluation.IEEE Journal on Selected Areas in Communications 2005; 23: 622–632.
36. Juang P, Oki H, Want W, Maronosi M, Peh L, Rubenstein D. Energy-efficient computing for wildlife tracking: designtradeoffs and early experiences with zebranet. In ACM SIGPLAN Notices, 2002; 96–107.
37. Johnson D, Maltz D. Dynamic source routing in ad hoc wireless networks. In Mobile Computing, Imielinski T, Korth H(eds). Kluwer: Dordrecht, 1996; 153–181.
AUTHORS’ BIOGRAPHIES
Di Wu is an associate professor in the School of Computer Science of Dalian University of Technology, China.He received the BS, MS and PhD degrees from Dalian University of Technology in 1993, 1996 and 2000respevtivly. He was a visiting scholar at the Simon Fraser University of Canada from 2009 to 2010. His researchinterests include optimization calculation theory and engineering applications and wireless networks.
Juanjuan Li is a postgraduate student at Dalian University of Technology of China. Her research interests are inchaos theory, ad hoc networks and delay-tolerant networks.
Jiangchuan Liu is an associate professor in the School of Computing Science at Simon Fraser University, BritishColumbia, Canada. He received his Bachelor of Engineering (cum laude, computer science) from TsinghuaUniversity, China, in 1999, and PhD (computer science) from the Hong Kong University of Science and Technology(HKUST) in 2003. His research interests are in networking: in particular, multimedia communications, overlay/peer-to-peer networking and wireless sensor/mesh networking.
A RANDOM OBSTACLE-BASED MOBILITY MODEL FOR DELAY-TOLERANT NETWORKING 339
Copyright © 2011 John Wiley & Sons, Ltd. Int. J. Network Mgmt 2011; 21: 326–339DOI: 10.1002/nem