Embed Size (px)
Citation preview

Enabling Delay-Tolerant Communications for Partially Connected Vehicular Ad Hoc Networks
Kadri Kaan Sevimli a, Mujdat Soyturk b,* a
Naval Science and Engineering Institute, Tuzla, Istanbul, 93942 – Turkey
b Department of Computer Engineering, Istanbul Technical University, Maslak, Istanbul 34469, Turkey
Abstract
The packet delivery ratio and throughput in Vehicular Ad Hoc Networks (VANETs) depend on the
network connectivity and degrade as the connectivity decreases. A delay-tolerant approach increases
the packet delivery ratio in partially connected networks. In the previous studies, the packet lifetime
and the vehicle's packet carry time are determined to maximize the packet delivery ratio in partially
connected VANETs. However, IPv6 uses the hop count in the Hop Limit field instead of using
seconds in the TTL field, as in IPv4. Similarly, although IPv4 packets are designed to carry the
packet lifetime in seconds in the TTL field, this field is used for the hop count in practice. In this case,
there is no mechanism to determine how long vehicles will carry packets in VANETs when
delivering packets in a delay-tolerant fashion. In this study, we propose approaches for the delivery
of IPv6 packets in a delay-tolerant fashion in partially connected networks. We also propose another
method that enhances these proposed approaches and optimizes the packet delivery ratio. The
proposed approaches are simulated to observe performance results. Our analysis shows that the
proposed approaches can be easily adopted for IPv6/IPv4 packets to be delivered in a delay-tolerant
fashion. Additionally, we observe that our approaches increase the packet delivery ratio in partially
connected Vehicular Ad Hoc Networks and can also be used in networks where the nodes are mobile
or connections get broken frequently.
Keywords: Delay-Tolerant Communications, IPv6, TTL, Carry Time, Packet Delivery Ratio,
Lifetime, Partial Connectivity
* Corresponding author. Mujdat Soyturk
E-mail addresses: [email protected], [email protected]
Please note that this version of the paper is the post-peer review, accepted paper submitted for final publication. The printed
and reformatted version is accessible at the original source of the publication (http://www.inderscience.com/info/inarticle
.php?artid=50264), where cited as “Kadri Kaan Sevimli, Mujdat Soyturk. Enabling Delay-Tolerant Communications for
Partially Connected Vehicular Ad Hoc Networks, International Journal of Ad Hoc and Ubiquitous Computing, Vol.11,
No.2/3, pp.157-168, 2012 (2012)”.

1 Introduction
Vehicular Ad Hoc Networks (VANETs) is a good example to the intermittently connected
networks where the connections change/break frequently. VANETs have unique features
that are very specific and not shared with other networks. Network performance is primarily
affected by node densities and vehicle speeds [1]. Node density in VANETs may change
very frequently in time and space. Urban areas have heavier traffic with respect to highways
and rural areas. While traffic is heavy in highways and urban areas during work hours (and at
suitable density for emergency message transfer over multi-hop paths), there is less number
of vehicles on those roads at nights which increase the interruptions and route breakages in
data transfer. While high node density causes a broadcast storm problem, low density causes
disjointed vehicle clusters that partition the network. In highways and rural areas, these
scenarios are more problematic than in urban areas. In both cases, the unique feature of
intermittent connectivity between vehicles precludes end-to-end connections between
source-destination pairs. As a result, main challenge in designing vehicular communication
protocols becomes to provide good delay performance and successful packet delivery under
the constraints of variable vehicular speeds, unreliable connectivity, and fast topological
changes [2].
In such networks, communications become impossible in real time. Messages can be sent in
a delay-tolerant fashion by the store-carry-forward method. A message is delayed at a node
until an intermediate node is found to forward the message [3]. Delaying packets at
intermediate nodes increases the end-to-end delay and makes the usual packet lifetime usage
impractical. The lifetime of the packets needs to be determined while considering the delay
times at the nodes. On the other hand, a short packet lifetime causes packet losses and a long
packet lifetime increases the load at the nodes because of an increased number of buffered
packets. Moreover, mobility, network connectivity and Quality of Service requirements of
applications force more careful lifetime determination for the packets to be sent in such
sparse networks. The packet lifetime that is determined affects the performance of the
network. There is a need to determine efficient packet lifetime and vehicles’ carry time to
maximize the network performance in terms of packet delivery ratio and Quality of Service
requirements of applications. In [4], the effects of partial connectivity and vehicle speeds on
packet lifetime and vehicle carry times are examined, where the packet lifetime is
determined to provide a desired packet delivery ratio for different levels of partial
connectivity for sparse VANETs.
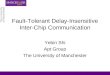
The communication protocol stack used in Vehicular Communications is given in Fig. 1 [5].
Internet Protocol (IP) is the standard protocol for all of the applications, using the TCP and
UDP protocols. In Japan, how to treat the IP layer is still an open issue. In the U.S.A., all of
the applications other than the safety applications that use Dedicated Short Range
Communication (DSRC) [6] use IPv6. Similarly, in Europe, all TCP/UDP traffic uses the
IPv6 protocol. In the IPv6 protocol [7], however, the Hop Limit field is used to determine a
packet’s lifetime within the network instead of the Time to Live (TTL) field in the IPv4
protocol [8]. The packet lifetime in seconds becomes useless as the Hop Limit is
decremented once at each hop. Similarly, although IPv4 packets are designed to carry packet
lifetime in seconds in the TTL field, this field is also used as the hop count in practice. In this
case, there is no mechanism to determine how long vehicles will carry packets in VANETs

to deliver packets in a delay-tolerant fashion. Hence, IPv6 packets cannot be delivered in a
delay-tolerant fashion in VANETs.
Figure 1 Car-2-X communication layers in Japan, Europe and U.S.A [5].
In this paper, we study the delivery of IPv6/IPv4 packets in a delay-tolerant fashion in
partially connected networks. Because the use of lifetime in seconds is not applicable in IP
packets, we propose methods which use the Hop Limit to maximize the packet delivery ratio.
We examined first the effects of the vehicle carry time on the packet delivery ratio and
second the relation between the hop limit and the carry time. Based on our analysis, we
propose approaches that use the hop limit and the carry time pair and propose another novel
method to increase performance results. Proposed methods are not new routing protocols but
methods that allow enabling packet forwarding in delayed manner which can be used in
conjunction with the routing protocols.
The work in this paper is one of the first studies that examines vehicle’s packet carry time in
conjunction with the hop limit to maximize the packet delivery ratio. In particular, our
contributions are as follows:
We point out the fact that rather than time in seconds, hop count is used as lifetime
which is inserted into the Hop Limit field in the header of the IPv6 packets and TTL
field in the header of IPv4 packets. Based on this fact, there is no use to insert
lifetime in seconds which is contrarily common in related studies in the literature. As
defined in the IPv6 protocol specification [7], it was left to upper-layer protocol that
relies on the internet layer (whether IPv4 or IPv6) to limit packet lifetime and to
provide its own mechanisms for detecting and discarding obsolete packets. In [7],
maximum hop limit for IPv6 packets was defined as 255. Although, default value
was not recommended in [7], 64 and 128 are used in practice. Use of high hop limit
value and packet queuing when there is not a connection in the intermittently
connected networks, e.g. VANETs, introduce additional delay and cause packet
losses due to buffer fill-up.
Our analysis suggests that lifetime should be determined with respect to current
conditions of the network, application area such as urban or highway, mobility,
speed of nodes, network connectivity and Quality of Service requirements of the
Safety
IP (?)
CSMA/CA
802.11p
Safety, Traffic info
Car-2-XTransport TCP/UDP
IPv6 (NEMO)
Car-2-X network
802.11p 802.11 a/b/g PHY (802.11p)
MAC (1609.4)
Mag set(SAE 2735)
Non-safety application
Comm mgr (1609.5) TCP/UDP
Network (1609.3) IPv6
Japan Europe USA

applications. Determining the lifetime carefully will also be useful identifying
suitable locations for placing stationary gateways that temporarily buffer messages
and thus improve the probability of delivering packets to the destination.
We present three approaches which define the lifetime in terms of packet carry time
and hop limit. We also propose another method that improves packet delivery ratio
for intermittently connected networks. The proposed method reduces packet drops
considering the lifetime and can be used in conjunction with forwarding/routing
schemes to improve the performance results in terms of packet delivery ratio while
obeying the delay constraints.
This paper is organized as follows. Studies and related work on vehicular networks and
delay-tolerant communication are presented in the second section. In the third section, the
effects of the hop count and carry time on the packet delivery ratio are examined and the
proposed approaches are demonstrated. Simulation and results are presented in the fourth
section, and finally, we conclude our discussion in the last section.
2 Related Work
It is important to provide a reliable transport service over an unreliable network where the
connections/routes get broken suddenly and frequently. Delay-Tolerant Networks (DTNs)
[9] are the networks to overcome the lack of connectivity and to enable the communications
between nodes and applications in such kind of intermittent connectivity. DTNs enable
communication where connectivity issues like sparse and intermittent connectivity, long and
variable delay, high latency, high error rates, highly asymmetric data rate, and even no
connectivity exist between the communicating end-pairs [10]. Vehicular Ad Hoc Networks
(VANETs) use data forwarding approaches proposed for DTNs where vehicles
communicate with each other as well as fixed nodes placed along the roads or junctions in
order to disseminate messages. The store-and-forward method in packet switching networks
has evolved to an alternative that is a store, carry and forward method, where packets may
also be carried by network nodes from a place to another, increasing communications
efficiency. This method allows communication in challenging scenarios where additional
delays are acceptable, because carrying is much slower than transmitting, resulting higher
latency. Usually, there is a tradeoff between latency and delivery ratio. More messages can
be delivered successfully if more time is allowed [10]. To support real-time and multimedia
services as well as other type of delay-tolerant services, cross-layer protocol designs
spanning transport and network layers can be beneficial and crucial. Therefore, the main
challenge in designing forwarding algorithms for VANETs becomes to provide reliable
packet transmission with minimum delay, maximum throughput, and low communication
overhead [2]. Approaches and protocols for DTNs and VANETs deal only with the
forwarding plane where the control plane issues remain open. However, there are a number
of studies in the literature to apply routing protocols based on different schemes. Routing
protocols and forwarding schemes are surveyed in [2, 3, 11-13]. Some of these routing
protocols are summarized in the remaining of this section.
Classical ad hoc routing algorithms (such as Dynamic Source Routing (DSR) [14] and Ad
Hoc On-Demand Distance Vector (AODV) [15]) become inadequate and impractical for
Vehicular Ad Hoc Networks when the network density is low. The simplest approach that
can be used for low network density is to spread the message throughout the network in a

controlled manner with TTL usage, to make sure that it reaches its destination. For example,
the Epidemic Routing Algorithm [16] uses this method; data packets are spread within the
network similar to in the flooding algorithm. Therefore, this approach has all of the
unfavorable features of the flooding algorithm. Dissemination of packets through the
network is restrained by the Spray&Wait [17] and MoVe [18] algorithms, and unnecessary
packet transmissions are reduced in these algorithms. The MoVe algorithm allows nodes to
forward packets to vehicles whose direction is towards the destination, while the
Spray&Wait algorithm sends packets to a certain number of vehicles chosen at random. The
aim in all of these algorithms is to utilize simultaneous multiple paths to make certain that
messages reach their destination. With these algorithms, however, it is not possible to
communicate between disjoint clusters in a partially connected network. It is impossible to
find a path between pairs of nodes that are in disjoint clusters.
Vehicle-Assisted Data Delivery (VADD) [19] protocol aims to forward the packet to the
best road with the lowest data-delivery delay for urban road networks where different road
segments have different vehicle densities. It attempts to utilize high density segments.
However, such an approach increases the utilization of the channel due to high node density
where packets can get dropped or incur high delay. Moreover, the approach relies on
preloaded traffic statistics such as vehicle speed and traffic density at different time of the
day. Therefore, it doesn’t propose an approach for intermittently connected sparse networks.
An improvement to VADD is SADV (Static-node assisted Adaptive data Dissemination
protocol for Vehicular networks) [20] which attempts to avoid selection of non-optimal
routes and attempts to reduce the packet delay by deploying static nodes at the intersections.
Based on the two forwarding schemes proposed in [20], namely in-road forwarding and
intersection forwarding, packets are forwarded either greedily along the road or forwarded to
static nodes located at intersections, which compute minimum delay paths based on vehicle
densities on different road segments. These static nodes have the ability to store the packets
until they find appropriate vehicles for the computed minimum delay paths.
Predictive Graph Relay (PGR) [21], Delay-Bounded Greedy Forwarding (D-Greedy), and
Delay-Bounded Minimum Cost Forwarding (D-MinCost) [22] are the geographically based
algorithms that aim at transferring the packet by delaying in low density networks. These
protocols aim to provide bounded transmission delay while minimizing the bandwidth
utilization. D-MinCost has improvement on D-Greedy by incorporating additional factors
such as vehicle density into the path selection process. A highly detailed study on packet
delivery which is proposed in [23] is the CAN DELIVER, Carry and forwArd mechaNisms
for Dependable mEssage deLIvery in VanEts using Rsus. The system designed to be in two
parts; first part handles routing from a vehicle to the nearest fixed node placed along the road
(called as Road Side Unit (RSU)) and the second part handles routing from RSUs to
vehicles. It proposes a routing protocol suitable for both dense and sparse conditions by
predicting the location of the destination in a precise manner and making use of all available
nodes to reach the destination. Although the data delivery rate is enhanced in these
algorithms, they do not address the issues about delays at nodes and packet lifetimes nor do
they make an evaluation of these issues.
One early study on the end-to-end delay in delay-tolerant networks is presented in [24]. In
this study, which is based on the Mobility Aware Routing Protocol and the Mobility
Dissemination Protocol (MARP/MDP) [25] for airborne networks, the authors attempt to
predict the minimum end-to-end delay and obtain a corresponding path for airborne

networks. However, they do not address issues that are related to carry time and lifetime.
Moreover, with regard to different levels of connectivity and speed of vehicles, the time
needed to transfer the data packets and hence, the lifetime of the packets to remain in the
network will change. The first study to address these issues and to determine the lifetime in
sparse vehicular networks is the study presented in [4]. This study provides a substantive
understanding of the relationship between the vehicle speeds, their carry time and the packet
lifetime. Unfortunately, as described in the following section, the Hop Limit field in the IPv6
packets makes lifetime usage impractical. Thus, there is a need for approaches that enable
the use of the lifetime in conjunction with the hop limit. Also, studies in the literature are not
mature which analyze and propose new approaches that carry IPv6 packets by vehicles to
provide a store-carry-forward mechanism. We aim to address these issues. We also propose
a novel method to carry IPv6 packets to maximize the packet delivery ratio in such sparse
networks. The approaches proposed in this paper are not a kind of forwarding or routing
schemes, but help to the forwarding/routing schemes to improve the performance results in
terms of packet delivery ratio while obeying the delay constraints.
3 Enabling Delay Tolerance for IPv6 Packets
Vehicles and nodes in sparse networks remain in clusters as partially connected when the
full network connectivity is not provided depending on node density and speed of nodes.
Sparse and intermittent connectivity affects the data transfer at an instant time causing route
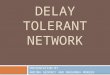
breakages and packet losses in end-to-end connections (Fig. 2 (a-b)). Store-carry-forward
method can be used in order to minimize the packet losses for intermittent connectivity. In
this mechanism, in case of no available neighbor nodes to forward the packet, the vehicle
stores the packet and carries until it finds a vehicle/path to send and then forwards the
packet (Fig. 2 (c)). By this way, even if there is not an end-to-end path at an instant time, due
to continuous topology change in the network, the message will arrive to the destination in
delayed time.
Key consideration for this method is determination of delay time; how long the message will
be carried by vehicles (Fig. 2 (d)). Depending on the carry time of the message, the
successful delivery probability of the message changes. Packet is dropped or is carried by the
vehicles according to determined carry time. Depending on this carry time, lifetime of the
packets in the networks varies, but using the packet lifetime infinite will also cause buffer
fill-up and packet losses at the intermediate nodes.
Vehicular Ad Hoc Networks, DSRC (Dedicated Short Range Communications) [26]
standards and 3G/WiMAX communications with roadside units require usage of the IPv6
protocol (Fig. 1). In IPv6, the Hop Limit field is defined by replacing the Time To Live field
in IPv4. Although TTL is defined as the packet lifetime in seconds, to limit packet’s life
within the network, this field is used as a hop count in practice and is decremented once at
each hop. The hop count avoids the implementation of a packet lifetime. Questions on how
long the vehicles can carry the packets and how long a packet can live within the network
remain open issues. The selection of these values randomly cannot provide the expected
packet delivery ratio. This problem becomes solidified in vehicular networks, because of the
low density property and the partial connectivity in such networks. Packet carrying time and
hence packet lifetime depends on the partialness degree of the network. These values affect
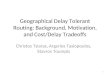
the packet delivery ratio. As can be seen in Fig. 3 [4], a successful packet delivery depends
on the determined packet lifetime.

Figure 2 (a) Store-and-Forward Method, (b) Packet dropping occurs on route breaks/link
failures in Store-and-Forward Method, (c) Store-Carry-Forward Method, (d) Indefinitely
packet carrying in Store-Carry-Forward Method fills buffer which causes packet losses.
While the lifetime determines a packet’s life within the network, the hop count determines
the boundary it can reach. These two values can be used to provide the expected packet
delivery ratio. However, there is no way to insert the lifetime into the IPv6 packet header.
Rather than use the packet lifetime, one simple solution can be to use the carry time in
conjunction with the hop count to generate the packet lifetime. A vehicle can carry packets at
most predetermined carry times if it cannot find an intermediate node to forward the packet
to. It transmits the packet immediately when it finds a node to forward the packet to, or drops
the packet on carry timeout. However, it is not easy to determine the hop count and the carry
time for partially connected networks. Partial connectivity affects the determination of both
the hop count and the carry time values because the distance a vehicle should take before
sending the packet depends on the level of partial connectivity of the network. A small hop
count and/or a short carry time increase the packet drops, and a high hop count and/or a long

carry time cause overhead in the network. An appropriate approach is to determine the carry
time and the hop count by utilizing a balanced approach in which the total time is not
allowed to exceed the packet’s total lifetime, as given in equation (1).
Lifetime TimeCarry x Count Hop (1)
Figure 3 Effects of network connectivity and packet lifetime on the packet delivery ratio for
Delay-Tolerant Communication Networks (DTN) and Non-Delay-Tolerant Communication
Networks (NDTN) [4]. 40% DTN means Delay-Tolerant Communications Network with
40% connectivity and in this context, it has different meaning than Delay Tolerant Networks
which was described in RFC 4838 and RFC 5050.
Equation (1) defines the lifetime in terms of the hop count and the carry time. One of our
aims is to find the appropriate hop count and carry time values, which maximize the packet
delivery ratio. Different approaches to find such a pair are given and summarized as follows.
After this point, we will use the term Hops-To-Live (HTL) instead of Hop Limit for IPv6 and
instead of Lifetime in terms of hops in IPv4, to avoid confusion with TTL and to emphasize
the difference.
If the lifetime is sustained at a constant value in equation (1), then an increase in the hop
count (HTL) value causes a decrease in the packet carry time, or vice versa. The carry time
depends on the selected HTL value. We therefore named the proposed approaches based on
the selected HTL values. The first approach aims to find an HTL value that provides the best
packet delivery ratio. Increasing the HTL value also increases the packet delivery ratio until
it reaches a peak value. The carry time-HTL pair that yields the peak delivery ratio can be set
as the best promising pair. We call this approach as the Best Observed HTL approach. The
Best Observed HTL approach aims to utilize the knowledge obtained from past experience of
its own and/or other nodes. It is possible for a vehicle to collect its own statistical data from

past communications. Such statistical data can be provided to the vehicle from other vehicles
in vicinity as well as RSUs with more accurate information.
Our second approach is based on applying an HTL value to allow packets to be transmitted
in as many hops as possible. The aim in this approach is to increase the delivery ratio by
reducing the drops that arise from HTL exhaustion. We call this approach the Max HTL. The
Max HTL approach aims to find the boundary of the network for the packet to be traversed.
The boundary is defined and found as a function of the maximum number of hops that a
packet can be transmitted. By this way, a packet cannot be dropped due to HTL exhaustion.
Note that increase in the hop count, however, reduces the carry time which may cause packet
drops due to carry timeouts. The Best Observed HTL and the Max HTL approaches require a
priori experimentation, knowledge or probing within the network to determine the values of
these system-wide parameters (HTL and carry time), which will be used in common by all
nodes.
Our third approach aims to reduce the number of drops that arise from the use of
pre-determined common HTL values for all of the packets. In this approach, the source
predicts the hop count to the destination (based on the distance and the transmission range)
and uses this value as the HTL for the packets it sends. This predicted approach is named the
Expected HTL approach. Each packet is set with a specific HTL value based on the distance
between the source and destination pair. The Expected HTL approach aims to use more
flexible HTL and carry time values depending on the distance between the communicating
pairs.
These approaches are summarized below:
Best Observed HTL aims to find the HTL and carry time pair that maximizes the
delivery ratio.
Max HTL aims to reduce drops due to hop count exhaustion and finds the needed
maximum hop count.
Expected HTL aims to use the value of the variable HTL, which is based on the source
and destination pair.
In these three approaches, an appropriate HTL and carry time pair is found to maximize the
packet delivery ratio. We can call such an appropriate pair the Best Hop Count vs. Carry
Time pair. However, even with such appropriate values, packet losses can still be observed.
Because of partial connectivity, a predefined carry time may be spent before an intermediate
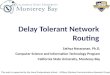
node forwards the packet (Fig. 4 (b)), or a predefined hop count may reach zero before the
packet reaches its destination. In either case, the packet is dropped at the intermediate node.
We propose a new novel method: to reduce drops due to hop count and/or carry time
exhaustion and to obtain a packet delivery ratio higher than the maximized value that can be
obtained with a Best Hop Count vs. Carry Time pair.

Figure 4 (a) Packet delivery with SCT and Store-Carry-Forward Method, (b) Packet
dropping occurs on carry timeouts with the PCT method, (c) PCT with Store-Carry-Forward
Method, (d) With the use of PCT method, packets never drop due to the carry timeouts. On
carry timeouts, HTL value is decremented and the carry time is reset. This process continues
until the node transmits the packet or the HTL value exhausts. Packet drops only occur on
HTL exhaust.

Algorithm 1 Pseudo Code of Steady Carry Time (SCT) Method.
Algorithm 2 Pseudo Code of Prolonged Carry Time (PCT) Method.
The proposed method works as follows. If a vehicle cannot find an intermediate node to
forward the packet to within the carry time limit, it decreases the hop count by one (if greater
than zero) and reinitiates the carry time, rather than dropping the packet (Fig. 4 (c)). In this
way, it avoids drops due to carry time and continues to carry the packet until it finds a next
node (Fig. 4 (d)) or until the hop limit (HTL) reaches zero. This method brings more balance
and flexibility to the equation (1), providing resilience between the carry time and hop count.
We named the former method the Steady Carry Time (SCT) method (the one that drops
packets after carry time exhausts and given in Algorithm 1) and the new method the
Prolonged Carry Time (PCT) (Algorithm 2). In this new method, PCT, we are expecting to
reduce the packet drops because of carry timeouts to a minimum, 0%. In the PCT method, an
intermediate node does not drop packets on carry timeouts (Fig. 4 (d)). The node
experiencing a connection problem, instead of dropping the packet, it continues to carry the
packet while decreasing the hop HTL value by one (if the HTL value of the packet is greater
than zero), and the carry time is reset. This process continues until it transmits the packet or
for (each_second){
decrement_one_value (txpacket_carrytime)
if ((txpacket_carrytime > 0) && (txpacket_HTL> 0)) {
keep_packet_in_buffer_to_be_sent()
}// end of if
else {
drop_packet ()
}// end of else
}// end of for
for (each_second){
decrement_one_value (txpacket_carrytime)
if (txpacket_carrytime > 0){
keep_packet_in_buffer_to_be_sent()
}// end of if
else if (txpacket_HTL > 0){
decrement_one_value (txpacket_HTL)
reset (txpacket_carrytime)
keep_packet_in_buffer_to_be_sent() }// end of else if
else {
drop_packet()
}// end of else
}// end of for

the HTL value exhausts. In this way, packets never drop due to carry timeout. Moreover,
total delay never exceeds the assessed lifetime which is determined at the source node. It
never introduces additional delay but increases the packet delivery ratio.
PCT method allows packets to be carried as long as the hop limit is greater than zero, while
the hop limit is decremented at each carry timeout. Packet drops due to carry timeouts are
avoided with this method. It also helps nodes to keep packets as long as the packet is valid.
Therefore, it also helps nodes to manage their queue and keep only recent packets.
4 Simulations and Results
In this section, a simulation environment is described and the simulation parameters are
given to evaluate the effectiveness of the approaches and methods that we proposed in the
previous section. In our analysis, we compared these approaches and showed the pros and
cons of each approach. Then, the proposed methods were applied to these approaches.
Simulation results related to the packet delivery ratio are presented.
Figure 5 Network topology with Manhattan Grid Structure. Every street has two lanes with
opposite directions.

4.1 Simulation Parameters
In the simulation of Vehicular Ad hoc Networks, we used the Manhattan Grid Topology and
the Mobility Model [27] for the topology and traffic. Fig. 5 shows the network topology at
an instant time in an urban area. Parameter values are determined to be similar in other
related studies [1]. The simulation environment constitutes various components and
functions for communications, network construction, applied protocols and network
dynamics. Main functions are: Random Vehicle Deployment, Direction and Speed Setting,
Vehicle Movement, Connectivity Analyze, Event Generation, Communication related
functions, Vehicles Plotting on Map (by Dislin program [28]).
Network Topology: Topology was constructed with 200m x 200m blocks over a 2km x 2km
area. Two-way roads were used with one lane each way. Vehicles distributed randomly over
the Manhattan Grid structured roads. Collisions in random positioning are avoided during
the initial placement phase.
Movement Pattern: Vehicles move at a predetermined constant speed. At junctions,
vehicles change their directions randomly either to the left or right or move in the same
direction [27]. Although different vehicle speeds affect the performance results [1, 4],
change in the average vehicle speed does not have an effect on the performance results [1,
29]. On the other hand, constant speed provides all details on packet drops and control on
buffers at nodes. Therefore, vehicles within the network are assumed to travel at a constant
speed similar to the studies presented in [1, 29].
Packet Types and Messaging Methods: Two types of packets are generally used in
Vehicular Ad Hoc Networks [22]. The first type is a single-hop broadcast (beaconing)
packet, and the second type is a multi-hop unicast packet. Beaconing packets containing
routine traffic information comprised of location, speed, and direction of vehicles are
forwarded as single hop messages. Application specific messages used by commercial
applications requiring peer to peer communications use the second type (unicast, multi-hop)
packets. In simulations, routine traffic messages broadcast with 3 second intervals as single
hop packets. Unicast peer-to-peer data are forwarded with a load ratio of 1 event/minute per
vehicle. Peer-to-peer data are sent as 5 successive unicast data packets, which make a load
ratio of 5 packets/minute per vehicle in addition to the beaconing packets. We assumed that
each node has knowledge of its neighborhood. In the experiments, the buffer size was kept
finite but the packet drops due to an insufficient buffer size were not allowed. This approach
prevents an insufficient buffer size from affecting the packet delivery ratio.
Communication Model: A 400-m transmission range [30], [31] is used for the vehicles. This
value is the accepted communication range according to the DSRC standards [26]. As the
signal propagation is affected from obstacles such as buildings, the communication range for
the vehicles has been accepted as 240 m (Fig.3).
Measurement Factors: Measurements are observed for different connectivity levels (40%,
60%, 80%, and 100%). Some of the simulation system parameters are summarized in Table
1. Network connectivity is defined as the maximum fraction of vehicles that are connected at
any given point in time, where any two vehicles can be connected either directly or indirectly
(via a multi-hop route) [29]. The network connectivity (NC) is given in equation (2) [29],
where N is the total number of vehicles in the network and C(i, j, t) is the connectivity

indicator. Connectivity indicator takes on the value of 1 if there is a path available from
Vehicle i to Vehicle j at time t, and 0 otherwise. Network connectivity levels are shown in
Table 2.
Table 1 Simulation Parameters
Parameter Value
Simulation Area 2 km x 2 km
Number of Vehicles 70, 96, 120 vehicles
Transmission Range 400 m, 240 m
Simulation Duration 30 min.
Vehicle Speed 60 km/h
Block Size 200 m x 200 m
(2)
Table 2 Connectivity Levels and Number of Vehicles
Connectivity Level Number of Vehicles
40% 70 vehicles (18 vehicle/km2)
60% 96 vehicles (24 vehicle/km2)
80% 120 vehicles (30 vehicle/km2)
100% 180 vehicles (45 vehicle/km2)
4.2 Simulation Results
In this subsection, we examine and present the simulation results for the approaches
proposed in the third section, which deliver IPv6 packets in a delay-tolerant fashion in
partially connected networks. To compare these approaches, we evaluated the packet
delivery ratio and the packet drops.
Simulations are comprised of two parts. In the first part, the appropriate hop count and carry
time pair to maximize the packet delivery ratio are found (for the given approaches in
Section 3) for different connectivity levels. In the second part, we compare the results of the
SCT method and the PCT method.
Table 3 Packet Lifetimes For Different Connectivity Levels
Connectivity Packet Lifetime
40% 90 sec.
60% 72 sec.
80% 48 sec.
In the simulations, the packet lifetime values given in Table 3 were used. In partially
connected networks, nodes send packets in a delayed manner if there is not any intermediate
node to send. The total encountered delay varies depending on the network connectivity
level, which determines the required packet lifetime of that network. These values, the
required packet lifetime for different connectivity levels, were determined in the [4]. Table 3
1
( ) max , ,i
j
NC t C i j tN

shows the required packet lifetime for different connectivity levels to provide a 100% packet
delivery ratio.
Part 1: Finding the Appropriate HTL value and Relationship between the HTL and
the Carry Time
The effects of different HTL values on the packet delivery ratio are presented in Fig. 6. If we
maintain the packet lifetimes given in Table 3 as constants, then an increase in the HTL
value causes a decrease in the packet carry times. The relationship between these two
parameters was given in Equation (1). As seen in Fig. 6, the packet delivery ratio never
reaches 100% for the different connectivity levels (40%, 60% and 80%). An increase in the
HTL value also increases the packet delivery ratio until it reaches its peak value, when the
HTL is equal to 10, and then it starts to decline for HTL values higher than 10. As the HTL
value increases, fewer packets drop because of an insufficient HTL value, which shows an
increase for the packet delivery ratio in Fig. 6. On the other hand, the increase in the HTL
value shortens the carry time, which thereafter causes packet drops because of carry
timeouts at nodes. Therefore, the highest packet delivery ratio is observed at HTL 10. We
will use this value as the Best Observed HTL value in the subsequent measurements. For a
fully connected network (100% connectivity), the packet delivery ratio reaches to 100% and
remains stable for HTL values of 14 and above. Packet losses resulting from low HTLs are
not observed when the HTL is 14 and higher. For such a fully connected network, the HTL
value should be at least 14, to provide a higher packet delivery ratio (Fig. 6). This value
(HTL=14) can be used as the default maximum HTL value to size packets in the
dissemination area. We will use this value as the Max HTL value for the remainder of the
simulations.
Figure 6 Effects of network connectivity ratio and HTL on the packet delivery ratio.
As presented above, increasing the HTL value does not increase the packet delivery ratio in
partially connected networks. For example, the packet delivery ratio with Best Observed
HTL (HTL=10) is higher than with Max HTL (HTL=14). It is related to the packet loss ratios

that result from HTL and carry timeouts. As seen in Fig. 7, although there are not any packet
losses resulting from HTL for the Max HTL approach, packet drop ratios from shortened
carry times that are inversely proportional to the applied HTL values are high. As seen in
Fig. 7, the Best Observed HTL approach presents the lowest aggregate packet drops (sum of
packet drops caused by HTL and carry timeouts) and hence, provides the highest packet
delivery ratio.
Figure 7 Effects of network connectivity ratio and HTL on the packet drop ratio.
Considering the case defined above, if the packet lifetime that maximizes the packet delivery
ratio is known (or an intuitive lifetime is applied), then the pair of HTL-carry time values
that preserve/provide the maximum packet delivery ratio can be determined. When the
nodes (vehicles) are aware of the carry time (or it is provided to them), the hop limit or the
HTL mechanism is applied in a delay-tolerant fashion for IPv6 packets. Consequently, the
main aim becomes to decrease the packet drops from HTL and carry timeouts. For the given
scenario, the Best HTL-Carry time pair is yielded when the HTL value is 10. However, the
carry time varies with respect to the applied network connectivity level. For the given
scenario, the HTL-carry time pairs that maximize the packet delivery ratios for different
network connectivity levels are given in Table 4.
Table 4 Best Observed HTL – Carry Time Pairs
Connectivity Max HTL Best Observed HTL/
Carry time
40% 14 hop 10 hop / 9 sec.
60% 14 hop 10 hop / 7.2 sec
80% 14 hop 10 hop / 4.8 sec

Figure 8 Packet Delivery Ratios of the HTL approaches for different connectivity levels.
Drops that result from the HTL can be reduced using the following approach. If the source
predicts the hop count to the destination (based on the distance and transmission range), it
may use this value as the HTL in the packets that it sends. We will use this value as the
Expected HTL value. For a source-destination pair, each packet will be sent with a specific
Expected HTL value based on the distance between the source and destination pairs.
However, carry times cannot change depending on the source-destination pairs. Carry times
should be unique for all of the nodes within the network. There is no way to put such
information, e.g., the carry time, into the IPv6 packets. Nodes within the network can be
informed with this unique value via Road-Side-Units (RSU) or GSM infrastructures.
Because the carry time is a system-wide unique value, packet drops arising from carry
timeout will always be possible. When this approach is compared with others, it is seen in
Fig. 8 that the packet delivery ratio with Expected HTL usage is higher than Max HTL and
Best Observed HTL usages. In this approach, predicting the HTL value is the major issue
because the partial connectivity may cause erroneous predictions.
Part 2: Comparison of SCT and PCT
Our next aim is to minimize packet drops due to the HTL and carry timeouts, to provide a
100% (or close to 100%) packet delivery ratio. On the other hand, as shown in Fig. 6 and
Fig. 7, there is not a perfect pair of HTL-carry times. Only, packet drops caused by HTL
values can be reduced to zero (or close to zero) by using high HTL values. With the new
proposed method, PCT, we are decreasing the packet drops - that are attributed to carry
timeouts - going to zero. Compared the other approaches, better results are obtained. In the
PCT method, packets are not dropped because of carry timeout at intermediate nodes. If the
HTL is greater than zero, the HTL value is decremented by one value and the carry time is
reset. This process continues until it transmits the packet or the HTL value exhausts. In this
way, the packets never drop because of carry timeouts. This method may cause drops
attributed to HTL, but the resulting ratio remains negligible. As a result, the HTL and carry

time pair (and the lifetime) is used more effectively by the PCT method. The results are
shown in Fig. 9 and Fig. 10. Fig. 9 shows packet delivery ratios of the PCT method with the
Best Observed HTL, Max HTL, and Expected HTL approaches and their appropriate
HTL-carry time pairs. With the usage of the PCT method, packet delivery ratios are
increased to higher values in all of the approaches. For the Max HTL approach, a 99% packet
delivery ratio is obtained. To compare the PCT with the SCT (which uses steady carry time)
for each of HTL approaches, Fig. 10 is presented. An enhancement of the PCT method to the
SCT method is shown in Fig. 10. There is a substantial amount of increase in the packet
delivery ratio for the PCT method.
Figure 9 Effects of the PCT method for HTL approaches at different connectivity levels.
In Part 1, we determined the appropriate HTL-carry time pair for the approaches Best
Observed HTL, Max HTL and Expected HTL, to maximize the packet delivery ratio for
different connectivity levels. In the Expected HTL approach, however, determination of the
HTL value is the main concern when the network is partially connected. In Part 2, effects of
the PCT method, which uses the carry time more effectively and avoids packet drops that
result from carry timeout, are shown for the HTL approaches defined in Part 1.
In a partially connected network, each of the three HTL approaches can be used. Of these
approaches, Expected HTL provides a better packet delivery ratio. As defined before, it is
difficult to determine Expected HTL in sparse VANETs. Of the other two approaches, the
Best Observed HTL provides better results than Max HTL. It is difficult to determine the
correct HTL-carry time pair. This determination may require a priori calculations or probing
to find the best pair. The Max TTL approach is simple. The highest possible hop count of the
path is taken to be the HTL value. In Part 2, we show that the PCT method improves the
results of all of these three approaches. The success of the PCT method can be attributed to
effective carry time usage in this method. Packet drops resulting from carry timeouts are
avoided in PCT. For this reason, better results (99% packet delivery ratio) are obtained when
PCT is used with the Max HTL approach.

Figure 10 Effects of the PCT and SCT methods for the HTL approaches at different
connectivity levels.
In mobile applications, especially during crises and disasters, connections between the nodes
sporadically fail within the network, avoiding continuous communications. Sending data in
a delay-tolerant fashion provides a connection even though it is delayed. Determining the
HTL and carry time for the data that will be sent in a delayed manner affects the packet
delivery ratio. By using the proposed method, PCT, whatever the carry time is, the packet
delivery ratio is maximized. As a result, this method can be used very efficiently both for
VANETs and for mobile and immobile networks, where connections get broken frequently.
5 Conclusions
In Vehicular Ad hoc Networks (VANETs), connections can get broken frequently due to
intermittent connectivity. In the case of partial connectivity because of sparseness of the
network or features peculiar to VANETs, packets are delivered to destinations by the
store-carry-forward method. On the other hand, IPv6 is the standard protocol in IP layers for
applications that use UDP/TCP traffic. However, there is no mechanism in the IPv6 header
for delivering a packet in a delayed manner because the packet lifetime is determined with
the hop limit field. In this paper, we studied the delivery of IPv6/IPv4 packets in a
delay-tolerant fashion in partially connected networks. Because the use of lifetime in
seconds is not applicable in IP packets, we propose methods which use the Hop Limit to
maximize the packet delivery ratio. We also examined the effects of the vehicle carry time
on the packet delivery ratio and the relation between the hop limit and the carry time. Based
on our analysis, we proposed three approaches that use the hop limit and the carry time pair.
Three approaches, namely Best Observed HTL, Max HTL and Expected HTL, are defined to
maximize the packet delivery ratio. Because the carry time has a system-wide unique value,
packet drops resulting from carry timeout can always occur with these approaches.
Therefore, we proposed a novel method, the Prolonged Carry Time (PCT), to avoid drops
from carry timeouts. This method uses the carry time and the lifetime very effectively
without suffering from carry timeout drops. Our analysis showed that, for all partial
connectivity levels, the packet delivery ratio reached 99% for our test topology. This method

can also be used in other types of networks where the nodes are mobile or connections break
frequently. It will also be useful identifying suitable locations for placing stationary
gateways that temporarily buffer messages and thus improve the probability of delivering
packets to the destination. Moreover, Prolonged Carry Time method can be used in
conjunction with routing schemes to improve the performance results in terms of packet
delivery ratio while obeying the delay constraints.
References
[1] N. Wisitpongphan, F. Bai, P. Mudalige, V. Sadekar, O. Tonguz, “Routing in Sparse
Vehicular Ad Hoc Wireless Networks”, IEEE Journal on Selected Areas in
Communications, Vol. 25, No. 8, October 2007.
[2] G. Karagiannis, O. Altintas, E. Ekici, G. Heijenk, B. Jarupan, K. Lin, T. Weil,
"Vehicular Networking: A Survey and Tutorial on Requirements, Architectures,
Challenges, Standards and Solutions," IEEE Communications Surveys & Tutorials,
Vol.13, No.4, Fourth Quarter 2011, 584-616
[3] S. Panichpapiboon, W. Pattara-atikom, "A Review of Information Dissemination
Protocols for Vehicular Ad Hoc Networks," IEEE Communications Surveys &
Tutorials, Vol.PP, No.99, pp.1-15, 2011
[4] K.K. Sevimli, M. Soyturk, “Lifetime Determination for Delay Tolerant Communication
in Sparse Vehicular Networks”, International Symposium on Wireless Pervasive
Computing ISWPC 2010, Modena, May 2010.
[5] S. Sai, K.Mase, M. Nishibori, J. Inoue, M. Obuchi, “Field Evaluation of UHF Radio
Propogation for an ITS Safety System in an Urban Environment”, IEEE
Communications, November 2009.
[6] (2010) DSRC Website at Berkeley University. [Online] Available:
http://path.berkeley.edu/dsrc/
[7] Internet Protocol, Version 6 (IPv6) Specification, RFC 2460,
http://www.ietf.org/rfc/rfc2460.txt
[8] Internet Protocol, Darpa Internet Program Protocol Specification, RFC 791,
http://www.ietf.org/rfc/rfc0791.txt
[9] K. Fall, S. Farrell, "DTN: an architectural retrospective," IEEE Journal on Selected
Areas in Communications, Vol.26, No.5, June 2008, 828-836.
[10]P. Pereira, A. Casaca, J. Rodrigues, V. Soares, J. Triay, C. Cervello-Pastor, "From
Delay-Tolerant Networks to Vehicular Delay-Tolerant Networks," IEEE
Communications Surveys & Tutorials, Vol.PP, No.99, 2011
[11]K. C. Lee, U. Lee, M. Gerla, "Survey of Routing Protocols in Vehicular Ad Hoc
Networks", Advances in Vehicular Ad-Hoc Networks: Developments and Challenges,
IGI Global, Oct, 2009.
[12]Y.-W. Lin, Y.-S. Chen, S.-L. Lee, "Routing Protocols in Vehicular Ah Hoc Networks: A
Survey and Future Perspectives," Journal of Information Science and Engineering,
2009.

[13]T. Spyropoulos, R. N. B. Rais, T. Turletti, K. Obraczka, and A. V. Vasilakos, “Routing
for Disruption Tolerant Networks: Taxonomy and Design,” ACM/Springer Wireless
Networks, Vol. 16, No. 8, pp. 2349–2370, 2010.
[14]D. B. Johnson, D. A. Maltz, J. Broch,"DSR: The Dynamic Source Routing Protocol For
Multi-Hop Wireless Ad Hoc Networks", Ad Hoc Network, Chapter 5, Editor CE.
Perkins, Addison-Wesley, 2001
[15]C.E. Perkins., E.M. Royer, "Ad-hoc On-Demand Distance Vector Routing",
Proceedings of Mobile Computing Systems and Applications, pp. 90-100, 1999.
[16]A. Vahdat, D. Becker, “Epidemic Routing for Partially-Connected Ad Hoc Networks”,
Duke University, Technical Report CS-200006, April 2000.
[17]T. Spyropoulos, K. Psounis, C. S. Raghavendra, “Spray and Wait: Efficient routing
scheme for intermittently connected mobile networks”, ACM SIGCOMM workshop on
Delay Tolerant Networking (WDTN), 2005.
[18]J. LeBrun, C. N. Chuah, D. Ghosal, “Knowledge- Based Opportunistic Forwarding in
Vehicular Wireless Ad Hoc Networks”, IEEE VTC, Spring 2005.
[19]J. Zhao and G. Cao, “VADD: Vehicle-Assisted Data Delivery in Vehicular Ad Hoc
Networks”, IEEE Transactions on Vehicular Technology, Vol. 57, No. 3, pp.
1910–1922, 2008
[20]Y. Ding, C. Wang, L. Xiao. “A static-node assisted adaptive routing protocol in
vehicular networks”. In Proceedings of the fourth ACM International Workshop on
Vehicular Ad Hoc Networks (VANET '07). ACM, 2007
[21]J. Kurhinen, J. Janatuinen, “Delay Tolerant Routing In Sparse Vehicular Ad Hoc
Networks”, Acta Electrotechnica et Informatica, Vol. 8, No. 3, 2008, 7–13
[22]A. Skordylis, N. Trigoni, “Delay-bounded Routing in Vehicular Ad-hoc Networks”,
MobiHoc’08, May 2008.
[23]K. Mershad, H. Artail, M. Gerla, "We Can Deliver Messages to Far Vehicles," IEEE
Transactions on Intelligent Transportation Systems, Vol.PP, No.99, 2012
[24]K. C. Lee, A. Piechowicz, M. Gerla, A. Tiwari, A. Ganguli, D. Krzysiak, "Delay
Tolerant Mobility Aware Routing/Mobility Dissemination Protocol for the Airborne
Network," IEEE MILCOM 2009, Boston, MA, October 2009.
[25]A. Tiwari, A. Ganguli, A. Sampath, D. S. Anderson, B.-h. Shen, N. Krishnamurthi, J.
Yadegar, M. Gerla, D. Krzysiak, “Mobility Aware Routing for the Airborne Network
Backbone”, IEEE MILCOM 2008, San Diego, CA, October 2008.
[26]Vehicle Safety Communications Project Task 3 Final Report, “Identify intelligent
vehicle safety applications enabled by dsrc, dot hs 809 859”, NHTSA, March 2005.
http://www-nrd.nhtsa.dot.gov
[27](2010) ETSI, Universal Mobile Telecommunication System (UMTS), “Selection
procedures for the choice of radio transmission Technologies of the UMTS”, UMTS
30.03 Version 3.2.0, 1998-04. [Online]. Available:
http://www.3gpp.org/ftp/Specs/html-info/3003U.htm
[28]“Dislin.” Online: http://www.dislin.de/

[29]W. Viriyasitavat, F. Bai, O.K. Tonguz. “Dynamics of Network Connectivity in Urban
Vehicular Networks”, IEEE Journal on Selected Areas in Communications, Vol. 29,
No. 3, pp.515-533, March 2011.
[30]J. Nzouonta, N. Rajgure, G. Wang, and C. Borcea. “VANET Routing on City Roads
using Real-Time Vehicular Traffic Information”, IEEE Transactions on Vehicular
Technology, Vol. 58, No. 7, 2009.
[31]N. Eude, B. Ducourthial, and M. Shawky. “Enhancing NS-2 simulator for high mobility
ad hoc networks in car-to-car communication”, 7th IFIP International Conference on
Mobile and Wireless Communications Networks, Marrakech, Morocco, September
2005.
Kadri Kaan Sevimli received the B.Sc. degree in Electrical and Electronics Engineering
Department from Naval Academy, Istanbul, Turkey, in 2003. He received his M.Sc. degree in
Computer Engineering from Naval Science and Engineering Institute, Istanbul, Turkey, in 2010. He
is currently working at Turkish Naval Research Center Command (TNRCC) in Istanbul, Turkey. His
research interests include Wireless and Mobile Communications and Vehicular Ad Hoc Networks.
Mujdat Soyturk received the B.Sc. degree in Industrial Engineering from Naval Academy,
Istanbul, Turkey, in 1994. He received his M.Sc. and Ph.D. degrees both from Istanbul Technical
University, Istanbul, Turkey, in Computer Engineering in 2002 and 2007, respectively. He was a
visiting researcher for C4I Systems (Command, Control, Computer, Communications and
Intelligence Systems) in Naval Postgraduate School (NPS), Monterey, CA, in 2009. His research
interests include Wireless and Mobile Communications, Sensor and Ad Hoc Networks, Vehicular
Networks, and Net-Centric Communications.
Please note that this version of the paper is the post-peer review, accepted paper submitted for final publication. The printed
and reformatted version is accessible at the original source of the publication (http://www.inderscience.com/info/inarticle
.php?artid=50264), where cited as “Kadri Kaan Sevimli, Mujdat Soyturk. Enabling Delay-Tolerant Communications for
Partially Connected Vehicular Ad Hoc Networks, International Journal of Ad Hoc and Ubiquitous Computing, Vol.11,
No.2/3, pp.157-168, 2012 (2012)”.