Embed Size (px)
Citation preview
European Journal of Operational Research 60 (1992) 247-259 247 North-Holland
Theory and Methodology
A review of stochastic modelling of delay and capacity at unsignalized priority intersections
T.C.E. Cheng Department of Actuarial and Management Sciences, University of Manitoba, Winnipeg, Man., Canada R3T 2N2
S. Allam Department of Civil Engineering, University of Manitoba, Winnipeg, Man., Canada R3T 2N2
Received June 1990
Abstract: Priority intersections are road junctions where at least one stream of vehicles must yield absolutely to another stream of vehicles. Knowledge of the delay and queueing processes of minor road vehicles at such intersections is important for the decision making of traffic planners. Stochastic models of the processes at these types of intersections have been progressing incrementally, taking more realistic and complex interactions into account. Renewal-reward and Markov chain models have been used extensively in these models. Time dependency of traffic flow has also been taken into consideration, through discrete approximations and other simplifications. Although some field data verifications of the models have been performed, more intensive field data collection and analysis could prove useful in defining and extending the range of usefulness of these models.
Keywords: Stochastic processes; queues; road transportation; classification
Introduction
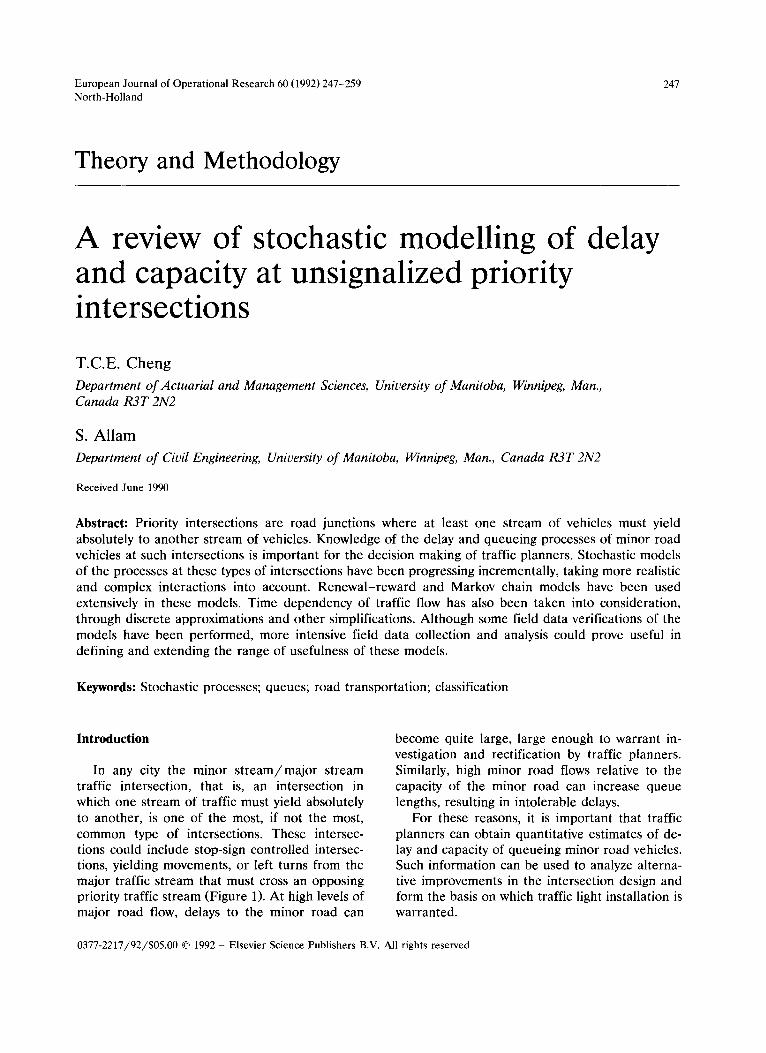
In any city the minor s tream/major stream traffic intersection, that is, an intersection in which one stream of traffic must yield absolutely to another, is one of the most, if not the most, common type of intersections. These intersec- tions could include stop-sign controlled intersec- tions, yielding movements, or left turns from the major traffic stream that must cross an opposing priority traffic stream (Figure 1). At high levels of major road flow, delays to the minor road can
become quite large, large enough to warrant in- vestigation and rectification by traffic planners. Similarly, high minor road flows relative to the capacity of the minor road can increase queue lengths, resulting in intolerable delays.
For these reasons, it is important that traffic planners can obtain quantitative estimates of de- lay and capacity of queueing minor road vehicles. Such information can be used to analyze alterna- tive improvements in the intersection design and form the basis on which traffic light installation is warranted.
0377-2217/92/$05.00 © 1992 - Elsevier Science Publishers B.V. All rights reserved
248 T C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections
Over the past three decades there has been a significant amount of work done in developing analytical models to analyze the capacity and incurred delay of minor stream vehicles waiting to cross a major stream of traffic. An overview of some of the early work on models of uncontrolled intersections can be found in Gazis (1974). This paper is a literature review of the models, focus- ing on their historical development, model struc- tures and assumptions, and discussing their mod- elling capability. The review also includes appli- cations of the models and field data analysis relevant to the models.
Problem formulation
Consider an intersection of two roads where one road, the major road, has absolute priority over the other road, the minor road (Figure 1). Major road vehicles pass through the intersection uninterrupted while vehicles arriving on the mi- nor road must wait for vehicles on the major road to pass, and for gaps between consecutive major road vehicles that are large enough for them to pass through or merge with the major road flow, before they can enter the junction. If a gap is large enough and there is a queue of minor road vehicles, it is possible that more than one vehicle from the minor road may enter the junction, utilizing the same gap in the major road traffic.
The characteristics of the minor road vehicle departures (capacity, average delay, average queue length, etc.) are dependent on a number of factors. The literature has consistently recognized the following as the most important considera- tions:
1) The headway distribution of the major stream traffic - the distribution of gaps in the major stream.
2) The gap acceptance behaviour of minor road vehicles - the probability of a gap of a given size being accepted. This is called the gap acceptance function.
3) The move up time - the time the next vehicle of a minor stream queue takes to move up and replace the vehicle which has just departed (i.e. entered the junction). The gap acceptance function and move up time may require a little more elaboration. A lead vehicle in a minor road queue has a certain probability of accepting a gap
~ - i i
(a)
~ r I f - ~ , , ~ 1-> I I"1
l u
I
(b)
~ 1 I~_.-I
, __> , - ->
(c)
Figure 1. Examples of priority/nonpriority vehicles at inter- sections
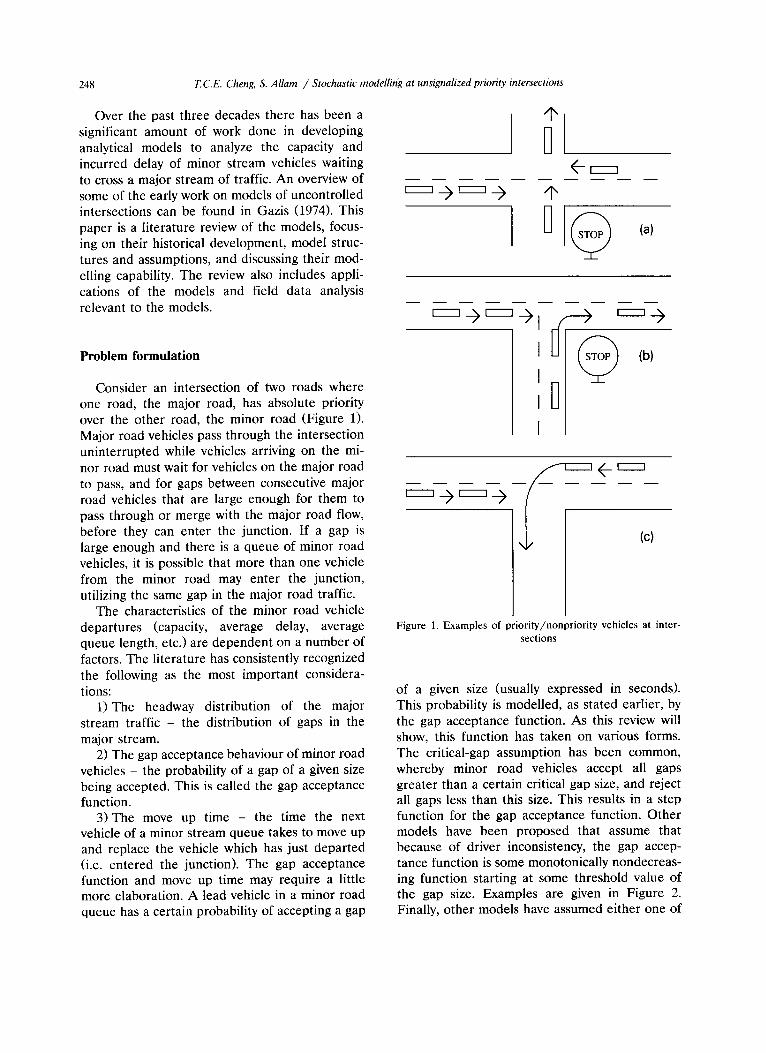
of a given size (usually expressed in seconds). This probability is modelled, as stated earlier, by the gap acceptance function. As this review will show, this function has taken on various forms. The critical-gap assumption has been common, whereby minor road vehicles accept all gaps greater than a certain critical gap size, and reject all gaps less than this size. This results in a step function for the gap acceptance function. Other models have been proposed that assume that because of driver inconsistency, the gap accep- tance function is some monotonically nondecreas- ing function starting at some threshold value of the gap size. Examples are given in Figure 2. Finally, other models have assumed either one of
T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections 249
Pr(accepting gap) (a}
Critical gap size
> Gap size (sec.)
Pr(accepting gap) (b} /
> ~-- Critical ~ Gap size (sec.)
gap size Figure 2. Examples of gap acceptance functions: (a) Step
function, (b) Other monotonically nondecreasing function
This review will follow developments by con- sidering the various approaches taken and as- sumptions made with regards to the three afore- mentioned factors. However, several models dis- cussed later do not explicitly take the gap accep- tance function into account directly. General re- sults and conclusions drawn by the various re- searchers will also be discussed. First a qualita- tive discussion is presented regarding the assump- tions related to vehicle headways on the major stream and minor stream headways. In the major stream case, headways correspond to gaps. Then the review will consider different models, starting with the single-major s t ream/s ing le -minor stream problem, and progressing to problems that take more complex intersections, with multiple con- flicts, into account. Time-dependent traffic flow models will also be discussed. Although the re- view will follow this order, it is not to say that all of the models at tempting to take more realistic conditions into account have progressed analyti- cally with equal success. Some of these models have made simplifications in order that the more complex problems can be analyzed to some quan- titative degree.
Traffic arrivals
the two types of behaviour stated above for indi- vidual drivers, but that the population of vehicles vary in their behaviour. That is, the value of the critical gap may vary from driver to driver, or parameters describing the second type of be- haviour may vary over the population. Field work has verified the existence of nonstep gap accep- tance functions and of different functions from driver to driver (Ashworth and Bottom, 1977; Herman and Weiss, 1961).
The move up time is important in determining the number of minor road vehicles that can cross in a given gap. If a gap of size G is found to be acceptable by a lead vehicle in a minor road queue, it will cross and the next vehicle moves up in time m, to replace the lead vehicle, and is therefore left with a gap of G - m to clear. Similarly, if the second vehicle accepts this gap and m is a constant, the next vehicle, if there is one, is left with a gap of G - 2m. The value of m has been considered either as a constant or a variable over the population.
Knowledge of the major stream arrivals is im- portant for the determination of the expected nature of the occurrence of gaps. Assumptions regarding major stream arrivals have been gener- ally classified as either random or random- bunched. Randomness implies arrivals follow the Poisson distribution, or equivalently, the interar- rival times follow the negative exponential distri- bution (Evans et al., 1964; Weiss and Maradudin, 1962). These models are adequate for very light flows; but, as the flows increase, vehicles tend to have minimum headways, which the negative ex- ponential distribution does not account for. Therefore the shifted negative exponential distri- bution has also been used (Hothersall and Salter, 1981). In such a case, it is assumed that arrivals are random beyond a minimum headway, below which the probability of an arrival is zero.
However, traffic volumes or road conditions may be such that a bottleneck may exist in the major s tream traffic somewhere upstream of the intersection. This will result in the arrival at the
250 T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections
intersection of tight blocks of vehicles of rela- tively uniform headways, separated by gaps of varying sizes. Researchers have tried to take this phenomenon into consideration in modelling the priority intersection problem by calculating the expected block lengths, during which time the headways are at a minimum fixed value. Tanner (1962) assumed that the percentage of vehicles that followed other vehicles in a block was lin- early dependent on the flow rate. Similarly, Plank (1982) assumed a known percentage of the fol- lowers, with the remainder following a shifted exponential distribution.
Assumptions regarding the nature of major stream vehicle arrivals at the intersection are not necessarily conflicting, rather they depend on the prevalent traffic conditions of a given intersec- tion. For the purpose of estimating delays, minor stream arrivals have been fairly consistently as- sumed to be Poisson. However, Troutbeck (1986) also considered the minimum headway approach, resulting in shifted exponential arrival headways for the minor stream of traffic. The minor stream arrival process is unimportant for estimating ca- pacity, as this is derived based on the assumption that the minor stream queue length is infinite.
Although the nature of headways is important, the qualitative results for the various models will be presented in the remainder of the review, where they fit in with regards to the nature of their other assumptions.
Single major stream/single minor stream
This section considers models which have been developed for situations where there is one minor traffic lane, with one type of movement (e.g. only right turns or only left turns), and one major stream of traffic. All of the following models in this section have assumed that no major stream vehicles turn off the major road. First a set of models that have considered the delay to a single minor road vehicle arriving at a random instant will be presented, followed by a discussion of queueing delay and capacity models.
Single-vehicle delay
Although the expected delay to a single minor road vehicle arriving at a random instant in time
may not by itself be useful to traffic planners, models that estimate it have proven useful in the sensitivity analysis of certain parameters or as- sumptions. Other researchers, as will be dis- cussed later, have adopted the models of single- vehicle delay as a component of the larger queue- ing models.
Weiss and Maradudin (1962) considered the delay to a single minor road vehicle arriving at a junction with a single stream of major road traf- fic, for the case of general distributions of gap acceptance and major stream headways. The problem was solved as a renewal-reward type with each major stream headway a renewal inter- val, and the delay in the interval the reward. The probability distribution of the delay was obtained by considering that if a vehicle merges in a given interval the total delay it had experienced was the sum of all previous rejected gaps. Given that there is a probability of accepting each successive gap (after rejecting all the previous gaps), an associated probability distribution of delay was found. From the resulting distribution the first and second moments of the delay time were found, as well as the expected number of major vehicles passing before a minor vehicle can cross.
Blumenfeld and Weiss (1970, 1979) used the single-vehicle delay formulation of Weiss and Maradudin (1962) to examine the effects of non- step gap acceptance functions. Using the delay models of Weiss and Maradudin, they chose a value of the critical gap such that it would yield the same expected single-vehicle delay as the nonstep gap acceptance function. They consid- ered two cases, a translated exponential distribu- tion and a gamma distribution of gap acceptance. The values of the probability of no delay, and the standard deviation of the average delay obtained using the calibrated critical gaps were compared to the values obtained from the nonstep gap acceptance function. They found that no serious errors in the probability of no delay were pro- duced using the critical gap approach. Rather large relative errors did occur for the standard deviation, but because the standard deviations were quite small the absolute value of the errors was not that great. The difference between as- suming one critical-gap function for the entire population and a step-gap acceptance function for each driver, but with a variable critical gap over the population, was also considered. In a
T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections 2 5 1
parallel study to calculate the single critical gap that would yield the same delay, they found that the probability of no delay was not seriously affected but the error in the variance of delay increased rapidly as flows became high, resulting in significant underestimation using the single- critical-gap approach.
In a later study, Blumenfeld and Weiss (1979), using the actual gap acceptance data by Ash- worth (1970) and Ashworth and Bottom (1977), found that the gap acceptance function for the data analyzed was represented well by a shifted exponential distribution, with a range of different distributions over the vehicle population. The range of the exponential distributions would be based on a continuous range of its parameters over the driver population. Using the same data, they then determined a distribution of critical gaps over the population that would be obtained if it was assumed that the gap acceptance func- tions were step functions with variable critical gap values. Using the single-vehicle delay formu- lation for both assumptions, the probability of no delay and the average delay obtained by each method were compared. It was concluded that, when using the distribution of critical gaps, esti- mation of average delay remained accurate, while the probability of no delay was slightly overesti- mated, and the variance of delay seriously overes- timated.
Weiss (1969) considered the problem of aver- age delay to a single arriving minor road vehicle when traffic on the main road consisted of a mixture of cars and trucks. The presence of large trucks can generate moving queues of vehicles on the main road, led by one truck, under Weiss' assumptions. Under these assumptions the major stream flow is characterized by blocks of vehicles led by trucks, during which time no merging or crossing can take place, with blocks separated by gaps of randomly distributed, nonqueued cars, during which time merging may or may not take place. Assuming the negative exponential distri- bution for headways between nonqueued major stream cars and for the headway between a car and the following truck, and a step-gap accep- tance function, Weiss solved for the average de- lay using the passing of trucks on the main road as regeneration points. Similar to the earlier work, the probability distribution of the crossing taking place in an interval was determined and subse-
quently the probability density function (pdf) of delay was found. An additional provision was made for the two exclusive ends of arriving either during a block or between blocks. The average delay was then calculated as a function of the critical gap, the percentage of trucks in the main stream, the average headway between successive cars in a block, the average headway between nonqueued cars and a car followed by a truck, and the average number of cars in a block. Weiss concluded that the average delay to minor road vehicles could be increased considerably by the presence of large trucks causing queueing in the major stream of traffic.
Queueing delay and capacity models
Before proceeding to the review of queueing delay and capacity, the general form of the capac- ity models that are based on renewal-reward theory will be discussed, since there exist numer- ous such capacity models. Capacity is defined as, given an infinite queue, the steady-state expected rate at which minor road vehicles would cross the intersection. In the renewal-reward models, the reward is the number of vehicles passing in each gap and the gap is modelled as the renewal interval. Let N(t) be the number of major vehicle headways accumulated up to time t. Then the capacity is defined as:
N(t) Xn C = lim ~ - - (1)
t - * ~ n - 1 t
where X, is the number of minor road vehicles crossing in the n-th major headway.
By the results of renewal-reward theory, we have
E [ X ] C = - - (2) E[H]
where E[X] is the expected number of minor road vehicles crossing in a gap of random size; E[H] is the expected headway and is equal to the inverse of the average flow on the major road, qm" It follows that
C=qme[X ]. (3)
The various models of capacity that use renewal-reward theory differ in their approaches
252 T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections
to calculating E[X], which is a function of the major stream headways, the gap acceptance crite- ria, and the move up time. It is important to assume in these formulations that the move up time is always less than the critical gap; a realistic assumption, so that at the beginning of each gap there is always a vehicle present.
Probably the most widely used and referenced priority intersection model is the one developed by Tanner (1962). With proper modelling of blocks and gaps for the major stream, Tanner defined the regeneration points as the crossing of a minor road vehicle or the end of a block when there were no minor road vehicles present. The mini- mum headway in the blocks was less than the critical gap. The state of the regenerative process was defined as the number of vehicles in the minor queue at each minor road departure, and thus the change in queue length between points was represented by the number of minor-vehicle arrivals. Formulas were developed for average delay to minor road vehicles and capacity as a function of the major- and minor road flows, the intra-block headways, a constant move up time, and the critical gap.
Owens (1968) performed field validation of Tanner 's model for the Road Research Labora- tory. Six T-intersections were observed and data collected to estimate all the parameters for Tan- ner's model (no assumed values were used). Ca- pacity was also estimated from the field data. Owens concluded that Tanner 's model provided very good estimates of the capacity at low to medium flows; but in highly congested conditions, the estimates from the model were not so accu- rate.
Hothersall and Salter (1981) and Plank (1984) used fixed-gap and fixed move up time assump- tions to examine the effects of various major stream headway assumptions and other assump- tions. Hothersall and Salter (1981) used the re- newal-reward technique to compare the results on capacity for negative exponential headway dis- tributions, shifted negative exponential headway distributions, Tanner 's flow model, and the flow model with a fixed percentage of bunched vehi- cles over a range of the percentage, all for the same fixed critical gap, fixed move up time, and minimum headways (accept the negative expo- nential which had no minimum). They found that at low major stream flow rates the differences in
capacity estimates were minor but as flow grew larger, the differences became substantial.
Plank (1982) compared the results of a re- newal-reward model, with a fluid approximation of capacity. The fluid approximation assumed the capacity is equal to the proportion of time accept- able gaps exist in the traffic stream multiplied by the inverse of the move up time. This assumes that the inverse of the move up time (called the saturation flow rate) is the maximum rate at which vehicles can leave a queue given no inter- ruption. Both cases were formulated for general distributions of major stream arrivals, and then compared for exponential headway distributions, bunched distributions and Tanner 's bunched dis- tribution.
In all cases the fluid approximation predicted lower capacities, with increasing error for increas- ing major stream flow rates. Plank also modified Tanner 's formula for the proportion of bunched vehicles by making it ' cubicly dependent on the flow rate rather than linearly. This resulted in better fit to the Road Research Laboratory data mentioned above.
The model of Evans et al. (1964) was one of the first to account for inconsistent behaviour of the minor road vehicles for gap acceptance and the move up time. They considered three prob- lems: queue length distributions, waiting time dis- tributions and capacity. In the first model pre- sented, Evans et al. assumed a negative exponen- tial distribution of gaps in the main-stream traffic and a given distribution of the critical gap over the population of vehicles. They assumed this critical gap was equal to the merging time T of a minor road vehicle, with T treated as a random variable. Rather than working with the move up time, the next vehicle replacing the lead minor road vehicle that just departed was faced with a gap of G - T, instead of G - m. Using Markov chains embedded in each major stream headway to consider the change in queue length, Evans et al. defined the passage of major stream vehicles as regeneration points, unlike Tanner (1963), who used the passage of minor stream vehicles. The problem was then extended to find the distribu- tion of waiting times, represented by the sum of two times, the time from the instant of arrival of the minor stream to the first major stream vehicle arrival plus the waiting time after passage of the first vehicle.
T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections 253
Evans et al. also presented a separate solution for the capacity of the minor stream vehicles. This problem was solved for a general distribu- tion of the gap acceptance function, unlike in the first case in which a distribution of critical gaps was assumed given. Also, this time they worked with a general distribution of the move up time, rather than working with the merging time. It is interesting that they considered the merging time approach in the first problem and the move up time approach in the second problem, consider- ing the assumptions did represent different traffic behaviour. The second approach is likely more realistic, since given a gap of G - m that is ac- ceptable, it is likely that drivers can proceed to cross even if the previous vehicle has not com- pleted its crossing.
Ashworth (1969) considered the inconsistency in vehicle merging in the fashion of Evans et al.'s (1964) queue length solution. With Poisson ar- rivals on the major road, Ashworth assumed that each driver had a step function for gap accep- tance distribution, but the critical gap was dis- tributed over a range for the minor road vehicle population in order to solve for the capacity of the minor stream for a general distribution of the critical gap. Ashworth assumed a fixed move up time common for all vehicles. He compared esti- mations of capacity for a normally distributed critical gap and for a constant critical gap equal to the mean of the normal distribution. At high volumes of major road flow the constant critical gap predicted significantly higher capacities than the distributed critical gap, with less difference at lower major road volumes.
One of the most truly complete general capac- ity models was developed by Plank and Catchpole (1984). They derived a capacity formula for inde- pendent identically distributed major stream headways with a general probabilistic distribution function, a general distribution of critical gaps with two limiting values, and a general distribu- tion of move up times also with limiting values. Because they were dealing with a range of critical gaps and move up times, they had to assume that in the range of move up times, all were less than the lowest critical gap. They admitted that their resulting general formulas were quite complex and " . . . is too complicated to be of practical use", but they went on to solve for the two cases of exponential major stream headways, and the
regular-random bunching of Tanner, maintaining the generality of the move up time distribution and the gap acceptance distribution.
Plank and Catchpole (1984) performed a sensi- tivity analysis on the fixed gap and move up time assumptions of the exponential major road mod- els and the bunched models such as Tanner's. They concluded that, for small variation of the move up times and critical gaps, using the fixed assumptions resulted in lower capacity estimates. They also concluded that for major stream flow rates significantly less than the inverse of the move up time, the effects of the variability on the move up time were much more significant than the effects of the variability on the critical gap. In cases of high major stream flow rates relative to the inverse of the move up time, the variability of the critical gap became more important.
Blumenfeld and Weiss (1979) also compared the capacities of minor stream queueing vehicles for the two cases of exponential gap acceptance function and single critical gap distribution ob- tained from the same data, for a situation where there are a range of gap acceptance functions distributed over the population of vehicles. They used the formulas of Evans et al. (1964) and suggested that, when a range of distributions of gap acceptance functions exists, the average dis- tribution could be used.
Catchpole and Plank (1986) stated that, when the population is nonhomogeneous, the simplifi- cation of working with the average gap accep- tance function, as suggested by Evans et al. (1964) and used by Blumenfeld and Weiss (1979), would lead to incorrect results. They made the point that averaging the population gap acceptance functions implies that the percentage of time a vehicle with a certain gap acceptance function is at the head of the queue is equal to its percent- age of occurrence in the vehicle population. How- ever, as they stated, vehicles that tend to reject larger gaps will be at the head of the queue more often, a greater percentage of time than their percentage population in the traffic stream. They considered the passage of major vehicles as a renewal process, with an embedded Markov pro- cess within each arrival time and the state at the beginning of a gap defined as the acceptance function for the lead vehicle.
To estimate capacity, Catchpole and Plank (1986) first considered a problem in which there
254 T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections
was a distinct number of vehicle types within the traffic stream, each with a different critical gap distribution and a known mixture of vehicle types, followed by a problem with a continuous range of vehicle types. For the former problem, they calcu- lated the capacity for a general distribution of major stream headways, a general distribution of critical gap and a fixed move up time for all vehicles. They subsequently simplified the models using the exponential and bunched headways. They showed, for both the discrete and continu- ous cases of vehicle types, that the capacity of the total minor stream was equal to the weighted harmonic mean of the capacities of each individ- ual vehicle type, rather than the simple weighted mean suggested by Evans et al. (1964). They presented numerical examples using two vehicle types - two different but fixed critical gaps in the discrete case, and two different ranges of critical gaps in the continuous case. In both cases, using the averaged critical gaps resulted in a capacity higher than that derived from their method, with reasonable approximations at low levels of major road flow but increasing error at high levels of flow.
Daganzo (1977) and Golias (1981) adapted the work of Yeo (1962) to find the mean delay to minor road vehicles. Yeo solved for average delay using a generalization of the M / G / 1 model where the service time consisted of two compo- nents, the service time of vehicles arriving to find no queue and the service time of vehicles arriving to find a queue (i.e. the M / G 2 / 1 model). Yeo calculated average delay as a function of the minor road arrival rate, and the first and second moments of the probability density functions of the service times for vehicles arriving to find no queue, E(t), and vehicles arriving to find a queue, Q(t).
Daganzo (1977) used fixed critical-gap and move up time assumptions to show that the ar- rival process of minor road vehicles that arrive to find no queue was not independent of the major stream arrivals (even if the arrival process of vehicles that arrive to queue was). This is because the previous minor road vehicles utilized gaps in the major traffic stream when there was no queue, and therefore the number of the times of no queue was dependent on major stream traffic arrivals. Daganzo took this into account by distin- guishing between gaps, the time between two
successive major vehicle arrivals, and lags, the time between the arrival of a minor stream vehi- cle when there was no queue and the time of the next major vehicle arrival. Using separate distri- butions of gaps and lags, Daganzo then solved for the first and second moments of Q(t) for use in Yeo's (1962) formula.
Golias (1981) adapted the work of Yeo (1962) and solved for the moments of Q(t) as functions of the moments of the density function of a general move up time distribution and the density function of the time spent by a lead vehicle in the queue scanning the traffic. For the density func- tion of the scanning time, Golias applied the single-vehicle delay problem of Weiss and Maradudin (1962), based on a general distribu- tion of gap sizes in the major traffic. Golias solved for the moments of E(t), the service time distribution of vehicles arriving to find no queue, as functions of the moments of the move up time density function of the previous driver to merge, and the scanning time of the arriving vehicle.
Golias then compared the results of the analyt- ical model to the results of a simulation model, using a gamma distribution for main road head- ways, Poisson arrivals of the minor road, a cumu- lative Erlang distribution for gap acceptance (based on the field data of Ashworth and Bottom, 1977) and an Erlang distribution for move up times over a wide range of parameters, and found good agreement over the ranges investigated.
Multiplg streams, conflicts and movements
All of the models discussed earlier have as- sumed a single lane of minor vehicles crossing (or merging with) a single major stream of traffic. Tanner (1967) extended the model of bunched major stream headways with Poisson arrivals in the minor stream, to accommodate for multiple streams that a minor road vehicle must negotiate when crossing. In an earlier study, Tanner (1962) suggested that, for two lanes, an estimate of the capacity could be obtained by totalling the flow of the two major streams of traffic and halving the intra-bunch headway. In the 1967 study, an exact model was developed to estimate the capacity of the minor stream for several lanes of the major stream, again with fixed critical gaps and move up times, for poisson arrivals on the minor road. A
T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections 255
minor stream vehicle cannot pass through the intersection unless sufficient gap size exists in the total flow. The proportion of time during which all major lanes have gaps is the product of the proportion of time during which each individual lane has gaps, assuming independent flows in each major stream lane.
Hawkes (1965, 1968) calculated the delay to a minor road stream consisting of mixed left and right-turning vehicles, sharing the same lane, fac- ing a major road with two-way traffic. The right- turning vehicles wait for gaps of sufficient size in the immediate lane while left-turners must wait for combined gaps of sufficient size in the com- bined lanes. Assuming fixed move up times and fixed critical gaps, one for left-turners which is greater than or equal to a fixed gap for right- turners, and random arrivals for major road and minor road vehicles, Hawkes used an embedded Markov chain approach and considered sepa- rately the case of vehicles arriving to find an empty queue. Conditional probabilities of delay were obtained for four possible events at each minor road departure: a left-turning vehicle with the next minor road arrival being a right-turning vehicle, LR; a left-turning vehicle followed by a left-turning arrival, LL; and similarly, RR and RL. For the left-turning vehicles, Hawkes as- sumed they faced a random process of major stream arrivals with a combined total flow. Hothersall and Salter (1977) applied Hawkes re- sults to a number of intersections and compared observed results to predicted results of delay. Reasonable agreement between the model and observations was obtained; but only the averages were compared.
Troutbeck (1986) extended the work of Dunne and Buckley (1972), who determined the average queueing delay to minor road vehicles as a func- tion of the single-vehicle delay and the degree of saturation, by a rearrangement of Tanner 's for- mulas. Troutbeck presented a model to calculate the single-vehicle delay with two major stream lanes. The model assumed that the minor road vehicle scanning for gaps alternates scanning of each lane, switching from one lane to the next once an acceptable gap is found. Troutbeck then examined the effects of the assumption of nega- tive exponential headways between arrivals on the minor stream. Such an assumption was used in Tanner 's model, which did not consider mini-
mum headways between vehicles on the minor road. Troutbeck showed that using the minimum headway, shifted exponential assumption resulted in a significant increase in the average delay as compared to Tanner 's model.
Golias (1986) presented a solution to the ca- pacity of the minor stream crossing two lanes of traffic, for the case of general gap acceptance functions, move up time distributions and major stream headways. Golias assumed that the capac- ity was equal to the sum of partial capacities, as given in (1), for each lane. Each partial capacity was determined, considering the number of vehi- cles crossing as a combination of a given gap in one lane and the remaining gap in the other, both evaluated with a bivariate gap acceptance func- tion, which is the probability of crossing given a gap in one lane and a remaining gap in the other. This formulation allowed for different gap accep- tance functions and headway distributions for each opposing lane.
The Swedish Capacity Manual (Hansson, 1978) approximated the queueing of minor road vehi- cles at realistic intersections with multiple ma- neuvers and conflicts using an M / G / 1 model for each minor road stream, considering the time spent at the front of the queue as service time. Each minor road stream of traffic was analyzed separately. All flows conflicting with the minor stream were converted to one major stream flow, with corrections for number of lanes. The capac- ity was then calculated, as given by (3), assuming fixed critical gaps and move up times, and a general distribution of the major stream head- ways (from the combined flows), with the capacity being interpreted as the mean service rate. This resulted in somewhat of an overestimate of ser- vice times since, even when there was no queue, the move up time was always considered in the estimation of service rate. The manual then pro- vided for correction to the capacity for the effects of vehicles turning from the major stream and the effects of short lanes. With the mean service time and arrival rates of the minor traffic stream known, then the standard M / G / 1 queueing model was then applied by calculating the traffic intensity as arrival rate divided by the service rate. The manual also suggested that, in the case of more than one minor stream departure move- ment sharing the same lane (e.g. left- and right- turners), a total traffic intensity, I, be used by
256 T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections
solving for the capacity of each minor stream, using the respective flows and summing their individual traffic intensities for use in the M / G / 1 model. That is,
k qi I = E--~i i (4) i=l where k denotes the number of movements shar- ing the lane, qi denotes the mean arrival rate of vehicles for movement i and C i denotes the ca- pacity of movement i.
By adapting the M / G / 1 model with simplify- ing assumptions, the Swedish capacity model has provided a means of obtaining quantifiable and reproducible estimates of intersection behaviour for more realistic and complex intersections.
Delay /
Stochastic
J i / V
100%
Coordinate / Transfor~ /
/ ; , ) / Oete inistic
/
> Capacity
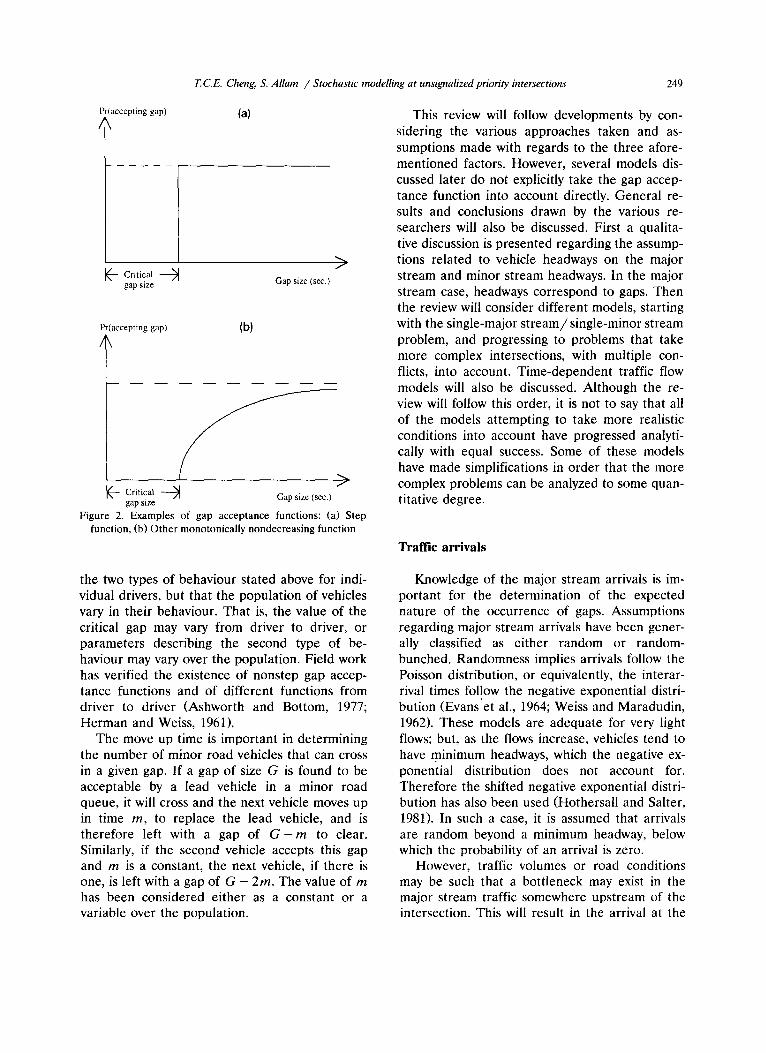
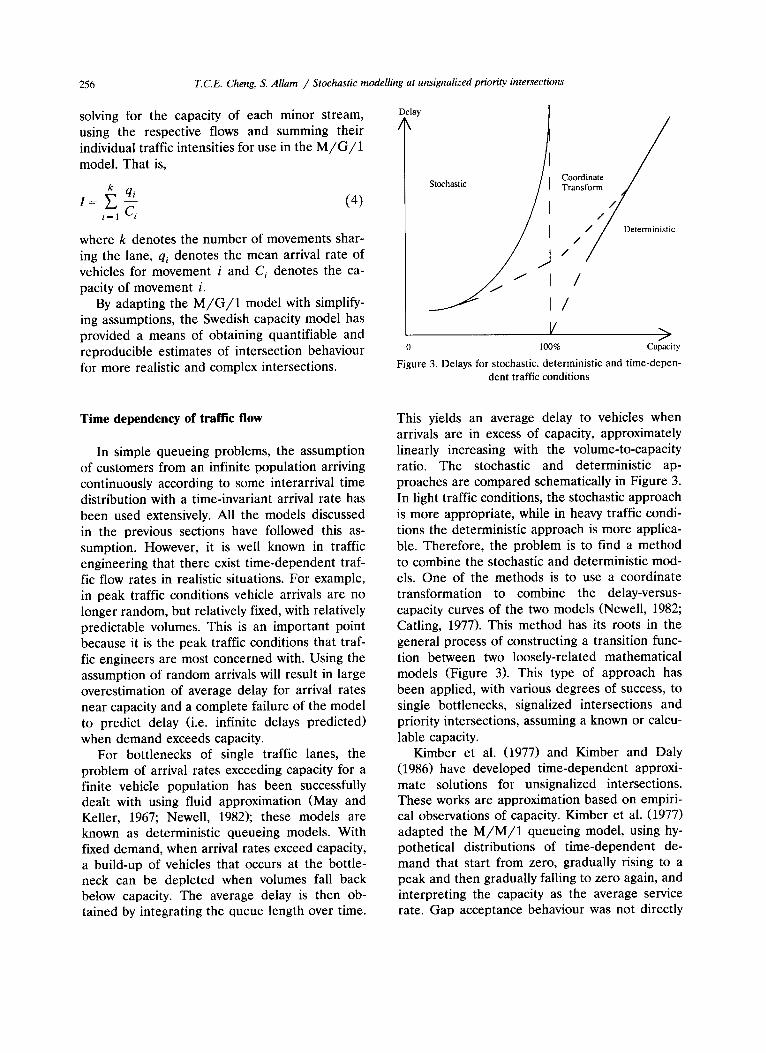
Figure 3. Delays for stochastic, deterministic and time-depen- dent traffic conditions
Time dependency of traffic flow
In simple queueing problems, the assumption of customers from an infinite population arriving continuously according to some interarrival time distribution with a time-invariant arrival rate has been used extensively. All the models discussed in the previous sections have followed this as- sumption. However, it is well known in traffic engineering that there exist time-dependent traf- fic flow rates in realistic situations. For example, in peak traffic conditions vehicle arrivals are no longer random, but relatively fixed, with relatively predictable volumes. This is an important point because it is the peak traffic conditions that traf- fic engineers are most concerned with. Using the assumption of random arrivals will result in large overestimation of average delay for arrival rates near capacity and a complete failure of the model to predict delay (i.e. infinite delays predicted) when demand exceeds capacity.
For bottlenecks of single traffic lanes, the problem of arrival rates exceeding capacity for a finite vehicle population has been successfully dealt with using fluid approximation (May and Keller, 1967; Newell, 1982); these models are known as deterministic queueing models. With fixed demand, when arrival rates exceed capacity, a build-up of vehicles that occurs at the bottle- neck can be depleted when volumes fall back below capacity. The average delay is then ob- tained by integrating the queue length over time.
This yields an average delay to vehicles when arrivals are in excess of capacity, approximately linearly increasing with the volume-to-capacity ratio. The stochastic and deterministic ap- proaches are compared schematically in Figure 3. In light traffic conditions, the stochastic approach is more appropriate, while in heavy traffic condi- tions the deterministic approach is more applica- ble. Therefore, the problem is to find a method to combine the stochastic and deterministic mod- els. One of the methods is to use a coordinate transformation to combine the delay-versus- capacity curves of the two models (Newell, 1982; Catling, 1977). This method has its roots in the general process of constructing a transition func- tion between two loosely-related mathematical models (Figure 3). This type of approach has been applied, with various degrees of success, to single bottlenecks, signalized intersections and priority intersections, assuming a known or calcu- lable capacity.
Kimber et al. (1977) and Kimber and Daly (1986) have developed time-dependent approxi- mate solutions for unsignalized intersections. These works are approximation based on empiri- cal observations of capacity. Kimber et al. (1977) adapted the M / M / 1 queueing model, using hy- pothetical distributions of time-dependent de- mand that start from zero, gradually rising to a peak and then gradually falling to zero again, and interpreting the capacity as the average service rate. Gap acceptance behaviour was not directly
T.C.E. Cheng, S. AIlarn / Stochastic modelling at unsignalized priority intersections 257
Arrival Rate
\
f
Time
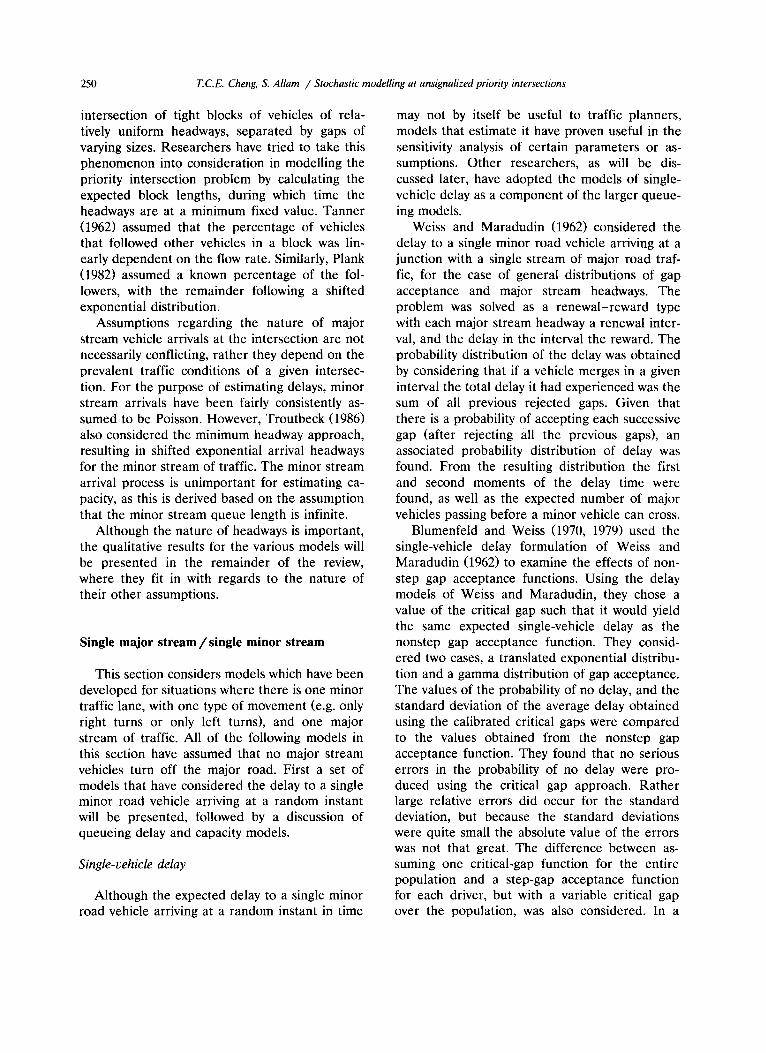
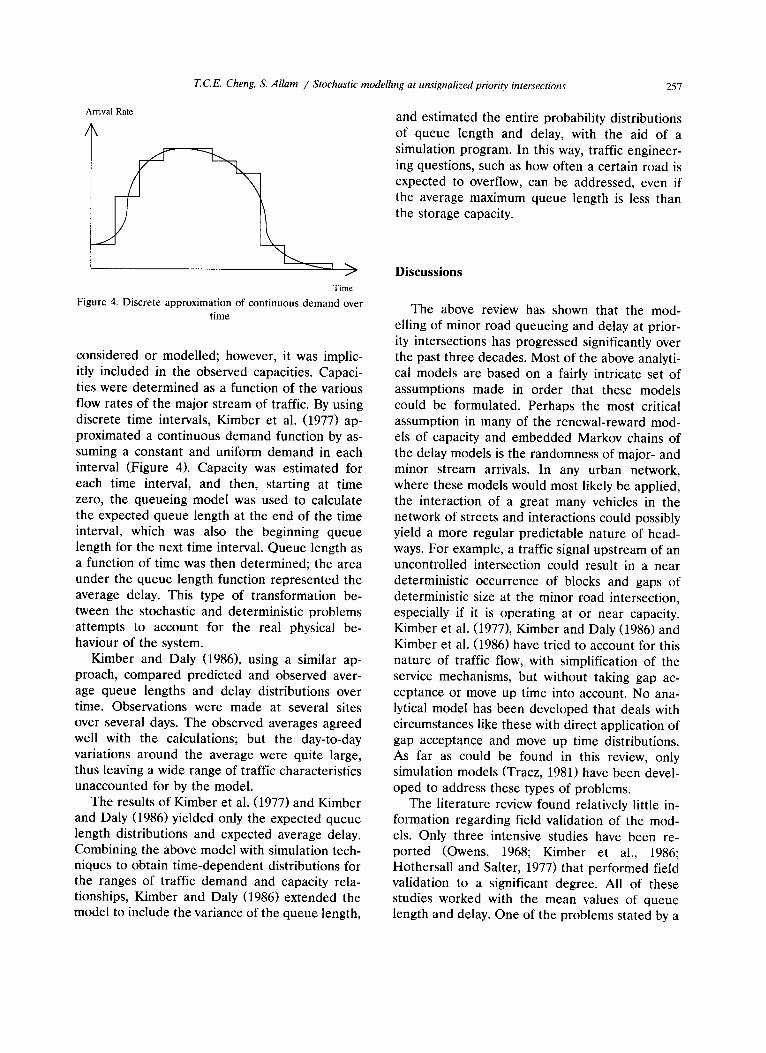
Figure 4. Discrete approximation of continuous demand over time
considered or modelled; however, it was implic- itly included in the observed capacities. Capaci- ties were determined as a function of the various flow rates of the major stream of traffic. By using discrete time intervals, Kimber et al. (1977) ap- proximated a continuous demand function by as- suming a constant and uniform demand in each interval (Figure 4). Capacity was estimated for each time interval, and then, starting at time zero, the queueing model was used to calculate the expected queue length at the end of the time interval, which was also the beginning queue length for the next time interval. Queue length as a function of time was then determined; the area under the queue length function represented the average delay. This type of transformation be- tween the stochastic and deterministic problems attempts to account for the real physical be- haviour of the system.
Kimber and Daly (1986), using a similar ap- proach, compared predicted and observed aver- age queue lengths and delay distributions over time. Observations were made at several sites over several days. The observed averages agreed well with the calculations; but the day-to-day variations around the average were quite large, thus leaving a wide range of traffic characteristics unaccounted for by the model.
The results of Kimber et al. (1977) and Kimber and Daly (1986) yielded only the expected queue length distributions and expected average delay. Combining the above model with simulation tech- niques to obtain t ime-dependent distributions for the ranges of traffic demand and capacity rela- tionships, Kimber and Daly (1986) extended the mode[ to include the variance of the queue length,
and estimated the entire probability distributions of queue length and delay, with the aid of a simulation program. In this way, traffic engineer- ing questions, such as how often a certain road is expected to overflow, can be addressed, even if the average maximum queue length is less than the storage capacity.
Discussions
The above review has shown that the mod- elling of minor road queueing and delay at prior- ity intersections has progressed significantly over the past three decades. Most of the above analyti- cal models are based on a fairly intricate set of assumptions made in order that these models could be formulated. Perhaps the most critical assumption in many of the renewal-reward mod- els of capacity and embedded Markov chains of the delay models is the randomness of major- and minor stream arrivals. In any urban network, where these models would most likely be applied, the interaction of a great many vehicles in the network of streets and interactions could possibly yield a more regular predictable nature of head- ways. For example, a traffic signal upstream of an uncontrolled intersection could result in a near deterministic occurrence of blocks and gaps of deterministic size at the minor road intersection, especially if it is operating at or near capacity. Kimber et al. (1977), Kimber and Daly (1986) and Kimber et al. (1986) have tried to account for this nature of traffic flow, with simplification of the service mechanisms, but without taking gap ac- ceptance or move up time into account. No ana- lytical model has been developed that deals with circumstances like these with direct application of gap acceptance and move up time distributions. As far as could be found in this review, only simulation models (Tracz, 1981) have been devel- oped to address these types of problems.
The literature review found relatively little in- formation regarding field validation of the mod- els. Only three intensive studies have been re- ported (Owens, 1968; Kimber et al., 1986; Hothersall and Salter, 1977) that performed field validation to a significant degree. All of these studies worked with the mean values of queue length and delay. One of the problems stated by a
258 T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections
number of the papers was finding intersections that could reasonably fit into the assumptions.
It is thus clear that one of the possible re- search directions that could be pursued in this area is an intensive field validation/sensitivity analysis of the various models. It may be possible to establish some criteria by which one could determine how much one can relax the assump- tions of the model before unacceptable errors begin to occur.
Another observation resulting from the litera- ture review is that although much attention has been paid to the variability of the gap acceptance function, and recent works (Plank and Catchpole, 1986) have considered the possibility of distinct vehicle types with distinct functions, the attention accorded to the move up time assumptions has been limited. Although some researchers have considered this as a variable, none has considered that these may be distinct values from vehicle type to vehicle type. The rigorous testing and field observations given to the gap acceptance function is not paralleled for the move up time, although the models have been proven sensitive to the assumed value of the move up time. A general thought running through the literature is that even with a distribution of move up times, its variance is quite small. Given the increasing amount of heavy trucks with trailers sharing the roads today, one can appreciate that, like the gap acceptance function, there could indeed be dis- tinct move up times for different vehicles. The standard traffic engineering practice for handling large trucks has been to convert them to an equivalent amount of cars by multiplying by a factor called the passenger car equivalent. Whether this is an acceptable practice for a prior- ity intersection analysis is undetermined by the review. Research considering minor road vehicles with a range of distinct move up behaviours over the vehicle population would be interesting and useful.
Summary and conclusions
Following is a list of some of the more impor- tant observations and conclusions drawn by the various researchers:
1) Assumptions regarding the headway distri- butions, gap acceptance functions and the move
up time have significant impacts on the values of capacity and delay obtained.
2) The impact of these assumptions increases with the flow of the major stream flow rate. At low flow rates, for example, assumptions of fixed critical gaps may yield reasonable results but not at higher flows.
3) Field observations for some of the models have shown that they can make accurate predic- tions, but errors increase at higher levels of flow.
4) The field observations are limited to com- parisons of the average values of delay and queue length to those predicted by the models.
The literature review has shown that the mod- elling of unsignalized priority intersections has progressed to a level capable of representing a fairly realistic intersection with a high degree of accuracy, as well as taking the inconsistent be- haviour of motorists into account. Field observa- tions have shown in light traffic conditions that stochastic models can provide reasonable esti- mates of capacity or delay of the minor stream traffic. In heavy traffic under conditions of con- gestion, models that consider the time-varying nature of traffic flow are more appropriate. How- ever, this requires considerable model simplifica- tion to yield exact solutions. Field observations have also shown that even these approximation models can provide reasonable estimates.
However, the review showed that published work encompassing field observations and valida- tion of the models was limited to a small number of intersections that fit fairly well into the as- sumptions of the models. Only comparisons of observed averages of capacity and delay to those predicted by the models have been made. It is recommended that intensive field data analysis work be undertaken which involves a large num- ber of intersections, from ones that are quite ideal with regards to the assumptions to those that are not (perhaps because of neighboring intersections, complex maneuvers, etc.). Sensitiv- ity of the models to the assumptions should be evaluated and a range of the usefulness of the models established based on which criteria be developed that determine under what conditions the models remain reasonably accurate. Perhaps methods that empirically correct and modify the solutions obtained from the models and methods that establish a range of estimates for delay and capacity should also be developed.

T.C.E. Cheng, S. Allam / Stochastic modelling at unsignalized priority intersections 259
Acknowledgement
This research was supported in part by a grant from the Faculty of Management Associates Fund of the University of Manitoba.
References
Ashworth, R. (1969), "The capacity of priority type intersec- tions with a non-uniform distribution of critical acceptance gaps", Transportation Research 3, 273-276.
Ashworth, R. (1970), "The analysis and interpretation of gap acceptance data", Transportation Science 4, 270-280.
Ashworth, R., and Bottom, C.G. (1977) "Some observations of drive gap acceptance behaviour at a priority intersec- tion", Traffic Engineering and Control 18, 569-571.
Blumenfeld, D.E., and Weiss, G.H. (1970), "On the robust- ness of certain assumptions in the merging delay problem", Transportation Research 4, 125-139.
Blumenfeld, D.E., and Weiss, G.H. (1979), "The effects of gap acceptance criteria on merging delay and capacity at an uncontrolled intersection", Traffic Engineering and Control 20, 18-20.
Catchpole, E.A., and Plank, A.W. (1986), "The capacity of a priority intersection", Transportation Research B 20, 441- 456~
Catling, L. (1977), "A time dependent approach to junction delays", Traffic Engineering and Control 18, 520-523.
Daganzo, C.F. (1977), "Traffic delay at unsignalized intersec- tions: Clarification of some issues," Transportation Science 11, 180-189.
Dunne, M., and Buckley, D. (1972), "Delays and capacities at unsignalized intersections", Proceedings of the Australian Road Research Board 6, 345-362.
Evans, D.H., Herman, R., and Weiss, G.H. (1964), "The highway merging and queueing problem", Operations Re- search 12, 832-857.
Gazis, D.C. (174), Traffic Science, John Wiley, New York. Golias, J.C. (1981), "Waiting to cross a major stream at an
uncontrolled road junction", Proceedings of the Eighth International Symposia on Transportation and Traffic The- ory, Toronto, 292-320.
Golias, J.C. (1986), "Towards a realistic analytical evaluation of minor stream capacity at priority road junctions", Traf- fic Engineering and Control 27,. 2-5.
Hansson, A. (1978), "Capacity of unsignalized intersections", Part 2 of Swedish Capacity Manual in Transportation Research Record 667, Highway Capacity, Measures of Effectiveness, and Flow Theory, Transportation Research Board, National Academy of Science, Washington. D.C., 4-11.
Hawkes, A.G. (1965), "Queueing for gaps in traffic", Biometrika, 52, 79-85.
Hawkes, A.G. (1968), "Gap acceptance in road traffic". Jour- nal of Applied Probability 5, 84-92.
Herman, R., and Weiss, G.H. (1961), "Some comments on the highway crossing problem", Operations Research 9, 828- 840.
Hothersall, D.C., and Salter, R.J. (1979), "Delays to mixed left and right turning vehicles at priority intersections", Traffic Engineering and Control 16, 88-89.
Hothersall, D.C., and Salter, R.J., "The effect of major road headway distribution on capacity and vehicular delays at priority junctions", Proceedings of the Institution of Cit,il Engineers, Part 2, 1149-1156.
Kimber, R.M., and Daly, P.N. (1986), "Time dependent queueing at road junctions: Observations and prediction", Transportation Research B 20, 187-203.
Kimber, R.M., Daly, P.N., Barton, J., and Giokas, C. (1986), "Predicting time-dependent distributions of queues and delays for road traffic at roundabouts and priority junc- tions", Journal of the Operations Research Society 37, 87- 97.
Kimber, R.M., Marlow, M., and Hollis, E.M. (1977), "Flow/delay relationships for major/minor priority junc- tions", Traffic Engineering and Control 16, 516-519.
May, A.D., and Keller, H.E.M. (1967) "A deterministic queueing model", Transportation Research, 1, 117-126.
Newell, G.F. (1982), Applications of Queueing Theory, Chap- man and Hall, London.
Owens. D. (1968), "Flow measurements at a number of un- controlled T-junctions", RRL Report LR171, Road Re- search Laboratory, Ministry of Transport.
Plank, A.W. (1982), "The capacity of a priority intersection - two approaches", Traffic Engineering and Control 23, 86- 92.
Plank, A.W., Catchpole, E.A. (1984) "A general capacity formula for an uncontrolled intersection", Traffic Engi- neering and Control 25, 327-329.
Tanner, J.C., "A theoretical analysis of delays at an uncon- trolled intersection", Biometrika 49, 163-170.
Tanner, J.C. (1967), "The capacity of an uncontrolled inter- section", Biometrika 54, 657-658.
Tracz, M. (1981), "Computer simulation as an aid to the design of priority intersections", Proceedings of the Eighth International Symposium on Transportation and Traffic Theory, Toronto, 623-639.
Troutbeck, R.J. (1986) "Average delay at an unsignalized intersection with two major streams each having a di- chotomized headway distribution", Transportation Science 20, 272-286.
Weiss, G.H. (1969), "The single lane merging problem with mixed cars and trucks", Transportation Research 3. 195- 199.
Weiss, G.H., and Maradudin, A.A. (1962) "Some problems in traffic delay", Operations Research 10, 74-104.
Yeo, G.F. (1962), "Single-server queues with modified service mechanisms", Journal of the Australian Mathematical Soci- ety 2, 499-502.





























