-
AbstractEmpirical research in DEM accuracy assessment has
observedthat DEM errors are correlated with terrain
morphology,sampling density, and interpolation method.
However,theoretical reasons for these correlations have not
beenaccounted for. This paper introduces approximation
theoryadapted from computational science as a new framework
toassess the accuracy of DEMs interpolated from topographicmaps. By
perceiving DEM generation as a piecewise polyno-mial simulation of
the unknown terrain, the overall accuracyof a DEM is described by
the maximum error at any DEMpoint. Three linear polynomial
interpolation methods areexamined, namely linear interpolation in
1D, TIN interpola-tion, and bilinear interpolation in a rectangle.
Their propa-gation error and interpolation error, whose sum is the
totalerror at a DEM point, are derived. Based on the results,
thetheoretical basis for the correlation between DEM error
andterrain morphology and source data density is articulatedfor the
first time.
IntroductionAs a digital representation of a topographic
surface, digitalelevation models (DEM) are routinely used in
various applica-tions such as terrain analysis, hydrological
modeling, andenergy flux study. Although much research on DEMs has
beenconducted since the 1950s, there is still a lack of
consensusregarding the fundamental question in DEM accuracy
assess-ment: What are the error components of a DEM? How is
eachcomponent, as well as the overall accuracy, assessed? In
theliterature, error variance and root mean squared error
(RMSE),which are rooted in error propagation theory, have
beenwidely applied (Tempfli, 1980; Li, 1993; Aguilar et al.,
2006).However, substantial challenges, both theoretical and
practi-cal, present themselves to the applicability of these
methods(Wise, 2000; Liu and Hu, 2007). For example, while
errorpropagation theory assumes that DEM errors are randomand
independent, many empirical studies have observedthat DEM errors
are actually correlated with terrain morphol-ogy and sampling
density (Torlegard et al., 1986; Östman,1987; Fisher, 1991; Hunter
and Goodchild, 1995; Kyriakidiset al., 1999; Holmes et al., 2000;
Lopez, 2002; Aguilar et al.,2005; Bonin and Rousseaux, 2005;
Oksanen and Sarjakoski,2006). The inability of error propagation
theory to account
Accuracy Assessment of Digital ElevationModels based on
Approximation Theory
Peng Hu, Xiaohang Liu, and Hai Hu
for the spatial and structural characteristics of DEM
errorssuggests that an alternative framework for DEM
accuracyassessment is necessary.
This paper introduces approximation theory adaptedfrom
computational science to examine the errors in DEMsinterpolated by
three linear polynomial interpolationmethods, namely linear
interpolation in 1D, TriangulatedIrregular Network (TIN)
interpolation, and bilinear interpo-lation in a rectangle. These
linear interpolation functionscan be applied to generate a DEM from
the contour linesand spot elevations in a topographic map as well
as fromlidar point data. In the following sections, we first
reviewthe nature and composition of DEM error to lay the
founda-tion of our discussion on approximation theory, then,derive
the theoretical formulas for each error componentin the three
interpolation methods. Based on these formu-las, the theoretical
reasons underlying the correlationbetween DEM error and terrain
morphology, source datadensity, and interpolation method are
revealed for thefirst time.
DEM Error ComponentsSince an interpolation-generated DEM
consists of a set of gridpoints, an overview of DEM error should
first address thepoint scale. Supposing T is a DEM point whose
unknown trueelevation is zT. Given an interpolation method, the
interpo-lated elevation using error-free source data is denoted by
HT.In reality, HT is rarely the elevation value ZT recorded in aDEM
because of the errors in the source data. The relation-ship between
HT and ZT can be written as: ZT � HT � dTwhere dT is the impact of
the errors in the source data onpoint T. It can be seen that dT �
ZT � HT.
To expedite the discussion on approximation theory,this paper
assumes that the gross error and systematic errorin the source data
have been removed to leave randomerror only. Under this assumption,
dT is equivalent to theamount of random error in the source data
propagated to aDEM point through the interpolation function, and
willhenceforth referred to as the propagation error. The totalerror
of a DEM point T, denoted by �ZT, is the differencebetween the true
elevation (zT) and that interpolated byDEM (ZT), i.e.,
(1)� (zT � HT) ; dT � RT ; dT¢ZT � zT � ZT � zT � (HT ; dT)
PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING J a n ua r y
2009 49
Peng Hu and Hai Hu are with the School of Resource
andEnvironment Science, WuHan University, 129 LuoYu Road,WuHan,
P.R.China 430079 ([email protected]).
Xiaohang Liu is with the Department of Geography &Human
Environmental Studies, San Francisco State University, 1600
Holloway Avenue, HSS 279, San Francisco, CA 94132.
Photogrammetric Engineering & Remote Sensing Vol. 75, No. 1,
January 2009, pp. 49–56.
0099-1112/09/7501–0049/$3.00/0© 2009 American Society for
Photogrammetry
and Remote Sensing
49-56_07-022.qxd 12/13/08 1:43 PM Page 49
-
50 J a n ua r y 2009 PHOTOGRAMMETRIC ENGINEER ING & REMOTE
SENS ING
where RT � zT � HT is called interpolation error because it
isentirely due to the imperfectness of the interpolation func-tion
and has nothing to do with the source data. Equation 1shows that
the total error at a DEM point consists of twocomponents:
interpolation error and propagation error. Botherrors depend on the
interpolation function, hence, they maynot be independent of each
other. It can be further shownthat interpolation error is
systematic error whereas propaga-tion error is random error (Liu
and Hu, 2007). As the sum ofthese two error components, DEM error
at the point scale is acombination of random and systematic
error.
That DEM error emerges from dual sources directlychallenges the
appropriateness of error propagation theorywhere the variances of
the total error (�ZT), the interpolationerror (RT), and the
propagation error (dT) are related asfollows (Tempfli, 1980; Li,
1993; Aguilar et al., 2005):
(2)
Equation 2 is the theoretical root of error variance and
RootMean Squared Error (RMSE), which have been widely usedto
describe the point and overall accuracy of a DEM since the1980s.
However, Equation 2 hinges on the critical assump-tion that
interpolation error (RT) and propagation error (dT)are both random
errors and independent of each other. Sinceinterpolation error is
actually systematic error and may notbe independent of propagation
error, the applicability ofEquation 2 to DEM accuracy assessment is
questionable.A detailed discussion on the challenges, both
theoretical andpractical, to error propagation theory and their
implicationsto the existing methods on DEM accuracy assessment
hasbeen presented by Liu and Hu (2007).
Approximation TheoryApproximation theory is used in
computational science tostudy how to approximate a complex function
z(x) usingsimpler functions Z(x) and quantitatively characterize
theerrors introduced therein. For example, supposing functionz(x) �
sin x is to be approximated by linear polynomialZ(x) � ax � b based
on a set of reference points. A typicalstrategy is to apply
piecewise interpolation which dividesz(x) � sin x into segments,
each of which is then approxi-mated by a line. The accuracy of the
approximation in asegment (denoted by Sj) is measured by the
largest error ata point in this segment, i.e., max ƒz(x) � Z(x) ƒ,
x � sj. Theoverall accuracy of the approximation is then measured
bythe largest error of any point in the entire domain, i.e.,
s¢zT2 � sRT
2 + sdT2 .
max( ƒ z(x) � Z(x) ƒ ). The rationale behind approximationtheory
is fairly simple: If even the largest error of any pointis
acceptable, the error at any point must be also accept-able, hence
the accuracy of the overall approximation isguaranteed. In the
context of DEM generation, terrain is thecomplex function z(x, y),
DEM is the approximation functionZ(x, y). Z(x, y) is constructed by
piecewise interpolation,i.e., by dividing terrain into consecutive
patches so that DEMpoints can be interpolated patch by patch.
Supposing T(xT,yT) is a DEM point, its error is denoted by �ZT.
Given apatch i which contains n DEM points {Tk, k � 1 . . . n},the
largest error in this patch is . The overall
accuracy of the DEM is characterized by
which is the upper bound of the error at any DEM point.Per
Equation 1, we know that �ZT � RT � dT. The accu-
racy of a DEM is thus measured by: max ƒ�ZT ƒ � max ƒ RT � dT
ƒmax ƒ RT ƒ � max ƒ dT ƒ.In the remainder of the paper, we derive
max ƒ RT ƒ
and max ƒdT ƒ for three linear polynomial interpolationmethods,
namely linear interpolation in 1D, TIN interpola-tion, and bilinear
interpolation in a rectangle. Thesemethods are widely used to
interpolate DEM from topo-graphic maps or lidar point data. A full
introduction tothese methods has been provided by Kyriakidis
andGoodchild (2006).
Propagation Error in Linear Interpolation Methods (dT)Linear
Interpolation in 1DLinear interpolation in 1D is a piecewise
polynomial interpo-lation in that each patch is a line segment.
Supposing thetrue elevation of the endpoints A (xa, ya) and B (xb,
yb) are zaand zb, respectively, the interpolated elevation at a
DEM
point T(xT, yT) is .
Letting and , the above
equation is rewritten as:
(3)
Equation 3 is based on error-free source data. In reality,
themeasured elevations of A and B usually contain random errorsda
and db. By taking these random errors into account, theactual
interpolation result ZT is ZT � v1 (zb � db) � v2 (za � da)� HT �
(v1db � v2da).
HT � v1 za � v2 zb, where v1 � v2 � 1, v1, v2 7 0.
v2 �xb � xTxb � xa
v1 �xT � xaxb � xa
HT �xT � xaxb � xa
zb +xb � xTxb � xa
za
…
maxi5max
kƒ ¢ZTk ƒ6
maxk
ƒ ¢ZTk ƒ
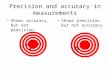
Figure 1. Three linear polynomial interpolation methods: (a)
linear interpolation in 1D, (b) TINinterpolation, and (c) bilinear
interpolation in a rectangle.
49-56_07-022.qxd 12/13/08 1:43 PM Page 50
-
PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING J a n ua r y
2009 51
Recall that propagation error is defined as dT � ZT � HT.The
above equation suggests that dT � v1db � v2da. LettingƒdA ƒ ƒ dB ƒ
� ƒ d ƒ, the result is:
(4)
Equation 4 shows that the propagation error in a DEM pointis
bounded by the larger error at an endpoint. By extendingthis
conclusion to the entire DEM and letting ƒ dnode ƒ denotethe
maximum error in a reference point, it can be seen thatƒ dT ƒ ƒ d ƒ
ƒ dnode ƒ . This suggests that the random errors inthe source data
are not amplified during their propagationthrough linear
interpolation in 1D to a DEM point.
TIN InterpolationTIN interpolation is also a piecewise
polynomial inter-polation in that it models terrain as consecutive
trianglefacets. Suppose T is a DEM point in triangle abc (Figure
1b).Under the assumption that the triangle vertices are
error-free,TIN interpolation can be written as HT � vaHa � vbHb�
vcHc, where va � vb � vc � 1, va, vb, vc � 0. va, vb andvc are the
areal proportions of the sub-triangles constructedusing T. If s is
the total area of triangle abc, s1, s2, s3 are theareas of the
sub-triangles, then va � sa/s, vb � sb/s, and vc �sc/s. When the
random errors in the triangle vertices aretaken into account, the
result is ZT � va (Ha � da) � vb (Hb �db) � vc (Hc � dc) � HT � dT.
Therefore, dT � ZT � HT � vada� vbdb � vcdc.
Letting ƒ da ƒ ƒ db ƒ ƒ dc ƒ � ƒ d ƒ , the result is
(5)
i.e., for each triangle patch, the propagation error at a
DEMpoint is bounded by the largest error in the triangle
vertices.Extending this conclusion to the entire DEM and lettingthe
maximum error of all reference points be ƒ dnode ƒ , thereshould be
ƒ dT ƒ ƒ d ƒ ƒ dnode ƒ . It can be seen that the randomerror in
source data is not amplified during its propagationto a DEM point
through TIN interpolation.
Bilinear Interpolation in a RectangleBilinear interpolation in a
rectangle approximates a terrainpatch as a rectangle. Given the
four vertices of a rectanglewhose true elevations are za, zb, zc,
zd, respectively (Figure 1c),the interpolated elevation of a DEM
point T using error-freesource data is:
(6)
where va, vb, vc, and vd are areal proportions of the
sub-rectangles constructed using T. Let the random errors in
thevertices be da, db, dc, dd, respectively. Taking these into
va, vb, vc, vd Ú 0HT � va za + vb zb + vc zc + vd zd, va + vb +
vc + vd � 1,
……
ƒdT ƒ � ƒva da + vbdb + vc dc ƒ … va ƒd ƒ + vb ƒd ƒ + vc ƒd ƒ �
ƒd ƒ ,
……
……
ƒdT ƒ � ƒv1dA + v2dB ƒ … v1 ƒd ƒ + v2 ƒd ƒ � ƒd ƒ .
…
account, the actual interpolation output is ZT � va (za � da)
�vb (zb � db) � vc (zc � dc) � vd (zd � dd).
The propagation error at T is thus:
Supposing ƒ da ƒ ƒ db ƒ ƒ dc ƒ ƒ dd ƒ � ƒ d ƒ , the result
is
ƒ dT ƒ � ƒ vada � vbdb � vcdc � vddd ƒ ƒ d ƒ
which means that the propagation error at a DEM point in
arectangle patch is bounded by the maximum error in thefour
vertices. Extending this result from one patch to theentire terrain
and letting ƒ dnode ƒ denote the largest error in thesource data,
there is ƒ dT ƒ ƒ dnode ƒ .
From the above derivation, it can be seen that whilepropagation
error depends on the accuracy of the sourcedata, it is also
affected by the mathematical form of theinterpolation function
utilized. When linear polynomials areapplied, the propagation error
at any DEM point is boundedby the largest error in the source data,
i.e., ƒ d ƒ ƒ dnode ƒ . Incontrast, if higher-order polynomials are
applied, there is therisk that the errors in the source data will
be amplified.
Interpolation Error in Linear Interpolation Methods
(RT)Interpolation error RT is the difference between the
trueelevation and the elevation interpolated using error-freesource
data. For each terrain patch, there exist locationswhere the
maximum difference between the interpolationfunction and the
corresponding terrain occurs. Let ƒ Ri ƒ denotethe maximum
difference in patch i. The interpolation error ofa DEM point RT
should be bounded by the largest ƒ Ri ƒ amongall patches, i.e., ƒ
RT ƒ ƒ Ri ƒ max{ƒ Ri ƒ }. The derivation ofinterpolation error is a
classic topic in numerical analysisand involves advanced calculus.
Interested readers arereferred to the numerous references available
such asAtkinson and Han (2004).
AssumptionsFrom the perspective of approximation theory, the
actual ter-rain z(x, y) is approximated by two functions: the first
is DEMZ1(x, y) whose domain is the set of evenly spaced DEM
points;the second is the source data Z2(x, y), i.e., the contour
linesand spot elevations from topographic maps or lidar data.
Topo-graphic maps are the products of surveying and mappingefforts
which aim to understand the topographical surface, so itis
reasonable to perceive them as an approximation of theterrain. In
order to derive the interpolation error bound, wemake three
assumptions regarding z(x, y), Z1(x, y), and Z2(x, y).
The first assumption is that source data Z2(x, y) is a
fairlyaccurate approximation of terrain z(x, y) in spite of the
meas-urement errors. Specifically, we assume that Z2(x, y) is able
toprovide the structural characteristics of the
topographicalsurface (e.g., ridges and valleys) in a sufficiently
accuratemanner. This assumption is reasonable considering that
Z2(x,y) is the basis for constructing DEM Z1(x, y). If the source
datais of poor quality, it is impossible for the resultant DEM
Z1(x,y) to approximate the terrain accurately. Another reason
forthis assumption is that terrain z(x, y) is an unknown
function.However, with Z2(x, y) being an accurate approximation,
themathematical parameters of this unknown function
becomecomputable. Note DEM Z1(x, y) is constructed based on
Z2(x,y), thus the errors in Z2 can be propagated to Z1. This is
thepropagation error previously discussed.
The second assumption regards terrain z(x, y).
Piecewisepolynomial interpolation uses consecutive patches to
approxi-mate terrain. Each patch can be further divided into
smaller
……
…
…
…
………
va + vb + vc + vd � 1, va, vb, vc, vd Ú 0.dT � ZT � HT � va da +
vbdb + vcdc + vd dd,
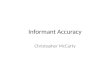
Figure 2. Linear interpolationin 1D.
49-56_07-022.qxd 12/13/08 1:43 PM Page 51
-
52 J a n ua r y 2009 PHOTOGRAMMETRIC ENGINEER ING & REMOTE
SENS ING
patches depending on the desired DEM accuracy and the den-sity
of source data. For each terrain patch, we assume thatthere exists
an interval [a, b] which contains this patch and onwhich terrain
z(x,y) is twice or more continuously differen-tiable. The
first-order derivative of terrain describes how fastthe elevation
changes, i.e., the slope gradient. The second-order derivative of
terrain describes the how fast the slope gra-dient changes, i.e.,
the concavity or convexity. Higher-orderderivatives do not
correspond to geographical conceptsdirectly, but they are
indicators of terrain complexity. Inessence, the above assumption
requires that the concavity (orconvexity) or the complexity of each
terrain patch is com-putable.
The third assumption regards the relationship betweenZ1(x, y)
and Z2(x, y). For a DEM point T, it is assumed thatits elevation is
interpolated by only the reference pointswhich are used to
construct the terrain patch on which T islocated; no other source
data are involved. Such an assump-tion is necessary to compare the
effectiveness of differentinterpolation methods because it
standardizes the input tothe methods. For piecewise linear
interpolation functionsin Figure 1, this assumption can be easily
satisfied. Forexample, the elevation of a DEM point T in TIN
interpolation(Figure 1b) depends on the three triangle vertices
only. If Tis located on the boundary between two adjacent patches,
itcan be interpolated by either patch. However, the interpo-lated
values should be exactly the same. The above threeassumptions are
for the analysis of interpolation error only.They are not required
to study the propagation error. Sinceinterpolation error is defined
as the discrepancy between thetrue elevation and the interpolated
elevation using error-freesource data, errors in the source data
are not taken intoaccount in the remaining discussion of
interpolation error.In other words, the elevations of the reference
points areconsidered error free.
Linear Interpolation in 1DLinear interpolation in 1D is the
method used in visualinterpretation of topographic maps. Given a
point lyingbetween two adjacent contour lines, a contour line and
areference point, or two reference points, a flow path
passingthrough the point can be constructed. This path is the
lineon which linear interpolation in 1D can be conducted.
Linearinterpolation is easy to understand and
computationallyefficient. It also guarantees that the interpolated
elevation isalways bounded by the elevations of the endpoints.
Thepractical challenge is how to delineate the flow path.
Whilehuman eyes are good at identifying the path, rigorouscomputer
implementation remains difficult.
To derive the interpolation error of a given patch i,we shall
rewrite linear interpolation in 1D in a new form.Letting z(x) be
the actual flow path, Z(x) is its approxima-tion by linear
interpolation in 1D (Figure 2). Z(x) is con-structed based on point
x0 and x1 whose true elevations are
z0 and z1 respectively, i.e.,
where Lj(X ) is the Lagrange basis function given
by . Since the flow path
z(x) defined by [x0, x1] is assumed to be twice continuously
differentiable on an interval [a, b], there exists j in [a,b]
to
satisfy .
The interpolation error for a DEM point T on the flowpath,
denoted by RT as in previous discussions, is thedifference between
the true elevation z(T ) and the approx-
z(x) � Z(x) �(x � x0)(x � x1)
2z–(j)
Lj (X ) � ß(x � xkxj � xk
) j, k � 0, 1; j Z k
� gzj Lj (x)
Z(x) � z0x � x1x0 � x1
+ z1x � x0x1 � x0
imation Z(T ), i.e., RT � z(T ) � Z(T ). Its error bound is
thus .
Let hi � ƒx1 � x0 ƒ be the interval of patch i, and M2i �
max(z(j))be the second order maximum norm of z(x) of patch i. Forx0
x x1, it can be seen by simple geometry or calculus that
. The interpolation error of a DEM point
in patch i is therefore bounded by
. Generating this relationship from one patch to
all patches, the result is:
(7)
where M2 � max {M2i} is the largest second-order maxi-mum norm
over the entire terrain, and h � max {hi} is thelargest interval
between two reference points, i.e., h � max{ƒ xi � xi �1ƒ }, i � 1,
. . ., n. Equation 7 shows that theinterpolation error at a point
in a DEM interpolated bylinear interpolation in 1D is bounded.
TIN InterpolationThe derivation of the interpolation error in
TIN interpolationis much more complex compared to linear
interpolation in1D. To expedite the discussion, the derivation
detail ismoved to Appendix I. Essentially, if we use M2i to
denotethe second-order maximum norm of terrain patch i and hi
todenote the longest edge of the corresponding triangle, theresult
is . By generalizing theresult from one patch to all triangle
patches, the result is
, where is the maximum
norm of second-order derivative of all triangle patches, and is
the longest triangle edge or equivalently
the largest interval between two reference points used
toconstruct a triangle.
Bilinear Interpolation in a RectangleBilinear interpolation in a
rectangle can be perceived as atwo-step process: first x is assumed
fixed so that terrainz(x, y) becomes a function of y, interpolation
is thenconducted along the y direction only; next y is assumedfixed
so that interpolation is conducted along the x direc-tion only.
Because of this property, the interpolation errorof bilinear
interpolation in a rectangle can be derived basedon the previous
results of the interpolation error of linearinterpolation in 1D in
Equation 7. Due to the complexity ofthe derivation process, the
derivation details are moved toAppendix II. Essentially, the
interpolation error of a DEM
point T is ,
where hi is the longer edge of rectangle patch i, i.e., hi �
max{|y1 � y0|,|x1 � x0|}, M2i is the second-order maximum
norm of patch i, i.e.,
. M4 is the fourth-order maximum norm of patch i,
i.e., .M4i � max0…x, y…hi
e `04 z(x, y)
0x20y2` f
`02 z(x, y
0y2` f
M2i � max0…x, y…hi
e `02 z(x, y)
0x2`,
ƒRT ƒ � ƒz(x, y) � Z(x, y) ƒ … 14M2 hi2 � 164M4 hi4
h � maxi5hi6
M2 � maxi5M2i6ƒRT ƒ … 38M2 h2
ƒRT ƒ � ƒz(T) � Z(T) ƒ … 38M2ihi2
ƒRT ƒ …18
M2 h2
� 18M2i hi2
ƒRT ƒ … max5z(x) � Z(x)6 � maxe(x � x0)(x � x1)
2 z"(j) f
(x � x0)(x � x1)
2… 18hi
2
ƒRT ƒ … max5z(x) � Z(x)6 � max e(x � x0)(x � x1)
2z–(j) f
49-56_07-022.qxd 12/13/08 1:43 PM Page 52
-
PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING J a n ua r y
2009 53
Extending the result from one patch to all patches,
theinterpolation function of bilinear interpolation in a
rectangleis obtained as where h is thelongest edge of any
rectangle, and M2,M4 are the second- andfourth- order maximum norm
of the entire terrain, respectively.
The results of the interpolation error, propagation error,and
total error in a DEM interpolated by the above threelinear
polynomial functions are summarized in Table 1.
Results and DiscussionIn the literature, many researchers have
observed that DEMerror is correlated with terrain morphology and
samplingdensity (Wood, 1994; Aguilar et al., 2005). However,
theunderlying theoretical reasons have never been articulated.The
approximation theory presented in this paper clarifiedthis issue
for the first time. DEM error is a combination ofpropagation error
and interpolation error. When the sourcedata has high vertical
accuracy, propagation error is small,and therefore DEM error is
dominated by interpolation error.From Table 1, it can be seen that
interpolation error dependson two factors: M2 or Mn which are
essentially descriptorsof terrain morphology, and h which describes
source datadensity because it measures the interval between two
refer-ence points. The characteristics of DEM errors observed in
theliterature are thus explained.
For a given study area, the value of M2 or Mn is a fixedvalue.
If the terrain is very complex or source data aresparsely
distributed, M2h2 will be a large value. Under suchcircumstances,
none of the interpolation methods in Table 1will be effective. This
explains the observation by someresearchers that DEM accuracy is
more affected by terraincomplexity and sampling density than
interpolation func-tion (Aguilar et al., 2005). However,
interpolation error canstill be reduced if the maximum interval h
is decreased byinserting new reference points. In practical
applications,source data density does not need to be uniform
throughouta study area. Rather, it can be adjusted depending on
ter-rain complexity. In the case that high density source data
isavailable and the vertical accuracy of the source data ishigh,
the interpolation error and the propagation error areboth likely to
be small. Consequently, any of the threeinterpolation methods in
Table 1 is likely to result in anacceptable DEM. This is why
interpolation method is lessimportant when generating a DEM from
lidar point data.
While the impact of interpolation error is little if sourcedata
is very sparse or very dense, it does play an importantrole in DEM
generation. From Table 1, it can be seen that thepropagation errors
in the three linear polynomial methodsare nearly the same. However,
their interpolation errors varysignificantly. Linear interpolation
in 1D has much higherpotential to result in a more accurate DEM
than the other twomethods. This result is interesting considering
that TIN iscurrently the dominant approach to interpolate a DEM.
To
ƒRT ƒ … 14 M2 h2 � 164 M4 h4
explore the rigorous implementation of linear interpolationin 1D
is thus a promising direction for future research onDEM
generation.
For the purpose of DEM quality control, the error boundsin Table
1 can be compared with a predefined criterion todetermine whether a
DEM is acceptable. For example, USGS(1998) DEM standard requires
that the maximum permittederror at a point in its Level II DEM is
50 meters. If the errorbound is found smaller than the permitted
value, the DEMis guaranteed to be acceptable. From Table 1, we know
thatDEM error depends on four factors: errors in the source
data,the interpolation function, second or higher order maximumnorm
of terrain, and the maximum interval in the sourcedata. To a DEM
producer, the interpolation method andthe source data should be
known. The main challenge isto compute the second or higher order
maximum norm (M2or Mn) of the unknown terrain function. In
numerical analy-sis, the value of M2 or Mn is usually computed from
a tableinstead of the mathematical function. For example, wewould
like to compute M2 for the function y � sin x. In lieuof calculus,
a table consisting of a list of y values correspon-ding to a set of
x can be constructed. Second-order divideddifference is then
computed based on the table to resultin the value of M2. For the
definition of the first and secondorder divided difference and
their calculation details,Atkinson and Han (2004) have provided
detailed discus-sions. In the context of DEM, the mathematical
function ofthe terrain is unknown. However, source data is an
approxi-mation of it. Recall in the previous Assumptions
subsection,we made three assumptions, one of which is that
sourcedata Z2 (x, y) is a fairly accurate approximation of terrainz
(x, y) despite the measurement errors. The key reason forthis
assumption is to enable the computation of M2 based onsource data
Z2 (x, y). Interpolation-generated DEMs usuallyuse topographic maps
as the source data. Topographic maps,where the terrain structure
information is embedded in thecontour lines and spot elevations,
typically must passquality control. Unless outdated, they are a
valuable sourcefor inferring the second- or higher-order
derivatives of aterrain. The computation detail is beyond the scope
of thispaper. However, M2 occurs in areas where slope
gradientchanges the fastest. A trained interpreter of
topographicalmaps should be able to identify such areas on the
map.
Summary and ConclusionsAvailability of a rigorous accuracy
assessment framework is amilestone in the development of any
technology. As one ofthe most important products of geospatial
informationtechnology, DEM serves myriad applications which
directlyimpact our society. Since the 1980s, error
propagationtheory has been used as the dominant framework to
assessDEM accuracy. However, its assumption that all errors in aDEM
point are random and independent of each other is
TABLE 1. ERROR BOUND OF THREE LINEAR POLYNOMIAL
INTERPOLATIONS
dT: random error propagation RT: interpolation error
Linear interpolation in 1D ƒ dT ƒ ƒ dnode ƒ
TIN interpolation ƒ dT ƒ ƒ dnode ƒ
Bilinear interpolation in a rectangle ƒ dT ƒ ƒ dnode ƒ
Total error max ( ƒ RT ƒ � ƒ dT ƒ ) max ƒ RT ƒ � max ƒ dT ƒ…
ƒRT ƒ …14
M2h2 �1
64M2h4…
ƒRT ƒ …38
M2h2…
ƒRT ƒ …18
M2h2…
49-56_07-022.qxd 12/13/08 1:43 PM Page 53
-
54 J a n ua r y 2009 PHOTOGRAMMETRIC ENGINEER ING & REMOTE
SENS ING
contradicted by the empirical observation that DEM error isnot
random but correlates with terrain morphology andsampling density.
In this paper, we presented approximationtheory as a new
perspective from which to assess the pointand overall accuracy of
an interpolation-generated DEM. Thisnew framework differs
drastically from error propagationtheory: while error propagation
theory describes the pointand overall accuracy of a DEM by
variance, approximationtheory uses the largest error of any DEM
point over the entireterrain. In other words, error propagation
theory is based onstatistics whereas approximation theory is based
on calculus.
Based on this new framework of approximationtheory, three linear
polynomial interpolations methodswere examined. It is pointed out
that interpolation errordepends on terrain morphology, source data
density, andinterpolation method whereas propagation error
dependson the vertical accuracy of the source data as well as
theinterpolation function. Among the three linear
polynomialinterpolation methods examined, the propagation errorsare
nearly the same whereas the interpolation error inlinear
interpolation in 1D is the smallest. This findingsuggests that the
development of a rigorous implementa-tion of linear interpolation
in 1D is a key to improve theaccuracy of interpolation-generated
DEMs.
ReferencesAguilar, F.J., F. Aguera, M. Agullar, and F. Carvajal,
2005. Effects of
terrain morphology, sampling density, and interpolationmethods
on grid DEM accuracy, Photogrammetric Engineering &Remote
Sensing, 71(7):805–816.
Aguilar, F.J., M. Aguilar, F. Aguera, and J. Sanchez, 2006.
Theaccuracy of grid digital elevation models linearly
constructedfrom scattered sample data, International Journal of
Geographi-cal Information Science, 20(2):169–192.
Atkinson, K., and W. Han 2004. Elementary Numerical
Analysis,Third edition, Chichester, John Wiley and Sons, Hoboken,
NewJersey, 560 p.
Bonin, O., and F. Rousseaux, 2005. Digital terrain model
computa-tion from contour lines: How to derive quality information
fromartifact analysis, GeoInformatica, 9(3):253–268.
Fisher, P.F., 1991. First experiments in viewshed uncertainty:
Theaccuracy of the viewshed area, Photogrammetric Engineering
&Remote Sensing, 57(12):1321–1327.
Holmes, K., O.A. Chadwick, and P.C. Kyriakidis, 2000. Error in
aUSGS 30-meter digital elevation model and its impact onterrain
modeling, Journal of Hydrology, 233:154–173.
Hunter, G.J., and M.F. Goodchild, 1995. Dealing with error
inspatial databases: A simple case study,
PhotogrammetricEngineering & Remote Sensing, 61(5):529–537.
Kyriakidis, P.C., and M.F. Goodchild, 2006. On the prediction
errorvariance of three common spatial interpolation schemes,
Interna-tional Journal of Geographical Information Science,
20(8):823–856.
Kyriakidis, P.C., A.M. Shortridge, and M.F. Goodchild,
1999.Geostatistics for conflation and accuracy assessment of
digitalelevation models, International Journal of
GeographicalInformation Science, 13:677–707.
Li, Z., 1993. Mathematical models of the accuracy of digital
terrainmodel surfaces linearly constructed from square gridded
data,The Photogrammetric Record, 14(82):661–674.
Liu, X., and P. Hu, 2007. Accuracy assessment of digital
elevationmodels based on approximation theory, Proceedings of
theGeographical Information Science Research UK Conference,11–13
April, Maynooth, Ireland (National Center for Geocompu-tation,
National University of Ireland Maynooth), pp. 246–251.
Lopez, C., 2002. An experiment on the elevation
accuracyimprovement of photogrammetrically derived DEM,
International Journal of Geographical Information
Science,16(4):361–375.
Oksanen, J., and T. Sarjakoski, 2006. Uncovering the statistical
andspatial characteristics of fine toposcale DEM error,
InternationalJournal of Geographical Information Science,
20(4):345–369.
Östman, A., 1987. Accuracy estimation of digital elevation
databanks, Photogrammetric Engineering & Remote
Sensing,53(4):425–430.
Tempfli, K., 1980. Spectral analysis of terrain relief for the
accuracyestimation of digital terrain models, ITC
Journal,1980(3):478–510.
Torlegard, K., A. Östman, and R. Lindgren, 1986. A comparative
testof photogrammetrically sampled digital elevation
models,Photogrammetria, 41:1–16.
USGS, 1998. Standards for Digital Elevation Models,
URL:http://rockyweb.cr.usgs.gov/nmpstds/acrodocs/dem/PDEM0198.PDF
(last date accessed: 02 October 2008).
Wise, S., 2000. Assessing the quality for hydrological
applications ofdigital elevation models derived from contours,
HydrologicalProcess, 14:1909–1929.
Wood, J.D., 1994. Visualising contour interpolation accuracy
indigital elevation models Visualization in Geographical
Informa-tion Systems (H.M. Hearnshaw and D.J. Unwin, editors),
JohnWiley and Sons, Chichester, West Sussex, U.K., pp. 168–80.
(Received 09 March 2007; accepted 19 July 2007; revised 30
October 2007)
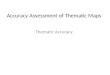
Appendix I: Interpolation Error of TIN InterpolationTo derive
the interpolation error of a DEM point T, let P1P2be a horizontal
line passing T and intersecting the triangleedges as shown in
Figure 3. Supposing z(x, y) is the actualterrain, Z(x, y) is the
triangle patch, (x, y) is line P1P2. Theinterpolation error of RT
of DEM point T can be written as:
(1a)
Since P1 and P2 are on the triangle, their true elevations canbe
written as z(P1) and z(P2) respectively. Similarly, sinceP1 and P2
are also on line z(x, y), their elevations can bewritten as z(P1)
and z(P2). It can be seen that z(P1) � z(P1)and z(P2) � z(P2). The
error bounds of z(T) � z (T) andz(T) � Z(T) are derived
separately.
1.
The term z(T ) � (T ) is essentially the interpolation error atT
when the unknown terrain z(x, y) is approximated by thelinear
function (x, y). According to Equation 11 on theinterpolation error
of linear interpolation in 1D, there shouldbe: where M2 is the
second-order maximum norm of the terrain patch approximated by
ƒz(T ) � z (T ) ƒ … 18M2 hP1 P22z
z
ƒz(T ) � z (T ) ƒ …18
M2 h2
RT � z(T ) � Z(T ) � [z(T ) � z (T )] + [z (T ) � Z(T )].
z
Figure 3. TIN interpolation.
49-56_07-022.qxd 12/13/08 1:43 PM Page 54
-
PHOTOGRAMMETRIC ENGINEER ING & REMOTE SENS ING J a n ua r y
2009 55
the triangle, hP1P2 is the interval between P1 and P2,i.e. hP1P2
� ƒ P1 � P2 ƒ . If we denote the longest edge of thetriangle as h,
it can be easily seen that hP1P2 h. Theabove equation can thus be
rewritten as
(a2)
2.
Terrain is a function z(x,y). (x, y), which is a linear
interpola-tion in 1D, can be perceived as an approximation of z(x,
y). Ifz(x, y) is used to interpolate T, it should be in the
followingform per Equation 3: z (T) � v1z(P1) � v2 (P2), v1 � v2 �
1,v1,v2 � 0, or equivalently:
(a3)
On the other hand, T can also be interpolated by triangleP1P2A3.
Since triangle P1P2A3 and triangle A1A2A3 define thesame plane, the
triangle functions determined by them shouldbe the same. Since
A1A2A3 defines Z(x, y), the functiondefined by P1P2A3 must also be
Z(x, y). The value of P1 and P2can thus be written as Z(P1) and
Z(P2). Since T is located onedge P1P2, its elevation can be
interpolated by:
(a4)
Combining Equations a3 and a4 together, the result is:
(a5)
The terms z(P1) � Z(P1) and z(P2) � Z(P2) are the
interpolationerror at P1 and P2 when approximating z(x, y) using
Z(x, y).Because P1 and P2 are located on line A1A3 and A2A3,
theirvalues can be interpolated by linear interpolation in 1D,
i.e.,
Applying the error bound of linear interpolation derived in
the Results section, there is , i � 1,2, where M2� is the
maximumnorm of second-order directional derivatives of the
triangle,and h is the longest edge of the triangle. Mathematically,
itcan be shown that M2� 2M2 where M2 is the second-ordermaximum
norm of the triangle. Therefore,
(a6)
Based on the result in Equation a6, Equation a5 can berewritten
as
(a7)
Combing Equations a2 and a5 together, the interpolationerror of
a DEM point in a triangle patch is given by
.
Appendix II: Interpolation Error of Bilinear InterpolationLet
z(x, y) be the terrain patch to be approximated by Z(x, y)which is
a bilinear interpolation function in a rectangle.Bilinear
interpolation in a rectangle can be perceived as atwo-step process:
first x is assumed fixed so that z(x, y)
� ƒz(T) � Z(T) ƒ … ƒz(T) � z (T) ƒ + ƒz (T) � Z(T) ƒ …38
M2 h2ƒRT ƒ
… v1.28
M2 h2 + (1 � v1).28
M2 h2 …28
M2 h2.
ƒz (T) � Z(T) ƒ … v1 ƒz(P1) � Z(P1) ƒ + (1 � v1) ƒz(P2) � Z(P2)
ƒ
ƒz(Pi) � Z(Pi) ƒ …18
M2¿ h2 …28
M2 h2
ƒz(Pi) � Z(Pi) ƒ …18
M2¿ h2
Z(P2) � l2 Z(A3) + (1 � l2)Z(A1), 0 … l2 … 1.Z(P1) � l1 Z(A3) +
(1 � l1)Z(A2), 0 … l1 … 1;
+ (1 � v1) ƒz(P2) � Z(P2) ƒ .ƒz (T) � Z(T ) ƒ … v1 ƒz(P1) �
Z(P1) ƒ
Z(T ) � v1 Z(P1) + (1 � v1)Z(P2), 0 … v1 … 1.
� v1z AP1 B � A1�v1 Bz AP2 B0 … v1 … 1 z (T ) � v1z (P1) � v2z
(P2)
z
z
ƒz (T ) � Z(T ) ƒ …28
M2 h2
ƒz(T ) � z (T ) ƒ …18
M2 h2.
…
becomes a function of y only, and interpolation is thenconducted
along the y direction; next y is assumed fixed sothat interpolation
is conducted along the x direction only.Letting Pxz(x, y) and
Pyz(x, y) denote the approximation ofz(x,y) along x and y
directions respectively, bilinear interpo-lation in a rectangle can
be written as: Z(x, y) � PxPyz(x, y).
Pxz(x, y), Pyz(x, y), and PxPyz(x, y) are all approxima-tions of
z(x, y). To facilitate the discussion on the interpola-tion error
of bilinear interpolation in a rectangle, we intro-duce unit matrix
I which satisfies IZ � Z. The error onusing Pxz(x, y) to
approximate z(x, y) is denoted by Rxz(x, y)where Rxz(x, y) � z(x,
y) � Pxz(x, y) � (I � Px)z(x, y).
From the above equation, it can be seen that
(a8)
The error on using Pxz(x, y) to approximate z(x,y) is denotedby
Rxz(x, y) where Ryz(x, y) � z(x, y) � Pyz(x, y) � (I � Py)z(x,y),
or equivalently,
(a9)
The error on using Z(x, y) � PxPyz(x, y) to approximate
terrainz(x, y) is thus:
(a10)
From Equation a9, we know (I � Py)z(x, y) � Ryz(x, y).
FromEquation a8, we know that Rx � I � Px. Therefore,(I � Px)Pyz(x,
y) � RxPyz(x, y) � Rx (I � Ry)z(x, y) � Rxz(x,y) � RxRyz(x, y).
Based on the above equations, Equation a10 can berewritten as:
Rz(x, y) � (I � Py)z(x, y) � (I � Px)Pyz(x, y) �Ryz(x, y) � Rxz(x,
y) � RxRyz(x, y), where Rxz(x, y) andRyz(x, y) are the errors on
approximating z(x, y) using linearinterpolation in 1D. The results
in the Linear Interpolationsubsection on the interpolation error of
linear interpolationin 1D can be applied to obtain
therefore,
0x2, x0 6 j1 6 x1, y0 6 h1 6 y1.
�(y � y0)(y1 � y)(x � x0)(x1 � x0)
2 04 z(j1, �1)
0x20y2
Rx Ry z(x, y) �(y � y0)(y1 � y)
2Rx [
02 z(x, �)0y2
]
y0 6 � 6 y1, � depends ony.
Ry z(x, y) �(y � y0)(y1 � y)
2 02 z(x, h)
0y2,
x0 6 j 6 x1, j depends on x;
Rx z(x, y) �(x � x0)(x1 � x)
2 02 z(j, y)
0x2,
� (I � Py)z(x, y) � (I � Px)Py z(x, y).
� [I � Py � (I � Px)Py ]z(x, y)
� (I � Px Py � Py � Py)z(x, y)
� (I � Px Py)z(x, y)
Rz(x, y) � z(x, y) � Z(x, y) � z(x, y) � Px Py z(x, y)
Py z(x, y) � z(x, y) � Ry z(x, y) � (I � Ry)z(x, y)
Rx � I � Px.
49-56_07-022.qxd 12/13/08 1:43 PM Page 55
-
56 J a n ua r y 2009 PHOTOGRAMMETRIC ENGINEER ING & REMOTE
SENS ING
Let h be the longer edge of the rectangle, i.e., h � max {|y1�
y0|,|x1 � x0|}, M2 be the maximum norm of the second-
order derivatives, i.e., ,
and M2 be the maximum norm of the fourth-order deriva-
tives, i.e., .
There should be:
0 6 h 6 h, h depends ony;
ƒRy z(x, y) ƒ … max ` y (y � h)2 02 z(x, h)
0y2` � 1
8M2 h2,
0 6 j 6 h, j depends on x;
ƒRx z(x, y) ƒ … max ` x(x � h)2 02 z(j, y)
0x2` � 1
8M2 h2,
M4 � max0…x, y…h
5 ` 04 z(x, y)
0x20y2` 6
M2 � max0…x, y…h
5 ` 02 z(x, y)
0x2` , ` 0
2 z(x, y
0y 2` 6
Combing these results together, the interpolation error
ofbilinear interpolation in a rectangle is bounded by:
�14
M2 h2 +1
64M4 h4.
… max ƒRx z(x, y) ƒ � max ƒRy z(x, y) ƒ � max ƒRx Ry z(x, y)
ƒ
� Rx Ry z(x, y) ƒ
ƒRT ƒ � max ƒRz(x, y) ƒ � max ƒRx z(x, y) � Ry z(x, y)
�1
64M4 h4 0 6 j1, �1 6 h.
ƒRx Ry z(x, y) ƒ … max ` x(x � h)y(y � h)2 04 z(j1, �1)
0x20y2`
January Layout.indd 56January Layout.indd 56 12/17/2008 12:42:07
PM12/17/2008 12:42:07 PM