Embed Size (px)
Citation preview
Adaptive Background Mixture Models forReal-Time Tracking†
Eric Thul
March 30, 2007
†By Chris Stauffer and W.E.L Grimson [4, 1]
Outline
Problem Statement
Methodology
Experimentation
Discussion
Feedback
Problem StatementTopic
The authors are working to develop an adaptive mixture ofGaussians that can model a changing scene.
Question
How can such a probabilistic model be used to distinguish betweenbackground and foreground pixels in the scene?
Rationale
To understand how effective their probabilistic model performswhen applied to real-time tracking.
Significance
Improvement to the stability and reliability for video surveillancesystems compared to other approaches.
Problem StatementOther Approaches
The authors compare their technique to:
I Averaging images over time to threshold-out foregroundpixels.
I Not robust to scenes with many (slow) moving objects
I Single threshold for the entire scene.
I Ridder et al. [3] improvement of modeling each pixel with aKalman filter.
I Not robust to backgrounds with repetitive change.
I Takes significant time to re-establish the background.
I Wren et al. [5] improvement of modeling each pixel with asingle Gaussian.
I Good indoor performance.
I Not tested for out-door scenes (for repetitive change).

Hypothesis
If we model each pixel as a mixture of Gaussians to determinewhether or not a pixel is part of the background, then we willarrive at an effective approach to separate the background andforeground, which can be used for real-time tracking.

Idealized ExampleOriginal Scene

Idealized ExampleBackground of the Scene
Idealized ExampleForeground of the Scene

Idealized ExampleOriginal Scene with Tracking
MethodologyOverview
Two main parts:
1. Probabilistic model for separating the background andforeground.
I Adaptive mixture of multi-modal Gaussians per pixel.
I Method for updating the Gaussian parameters.
I Heuristic for determining the background.
2. Technique for tracking objects in the foreground.
I Algorithm to label connected components.
I Method for tracking each connected component.
MethodologyThe Pixel Process
Definition
We define the pixel process of a pixel X as the history of it’s valuefrom frame 1 to frame t. This can be represented as follows.
{X1, . . . ,Xi , . . . ,Xt} where 1 ≤ i ≤ t
But what does this tell us?
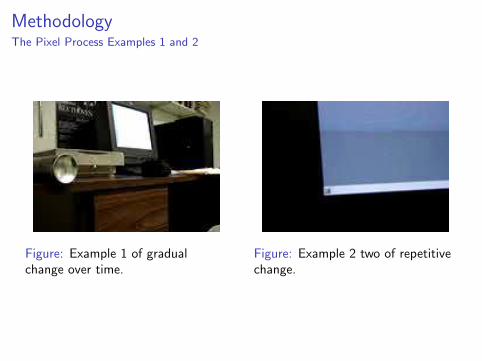
MethodologyThe Pixel Process Examples 1 and 2
Figure: Example 1 of gradualchange over time.
Figure: Example 2 two of repetitivechange.
MethodologyThe Pixel Process Example 1
0 20 40 60 80 100 120 140 160 1800
20
40
60
80
100
120
140
160
180
Red Channel
Gre
en C
hann
el
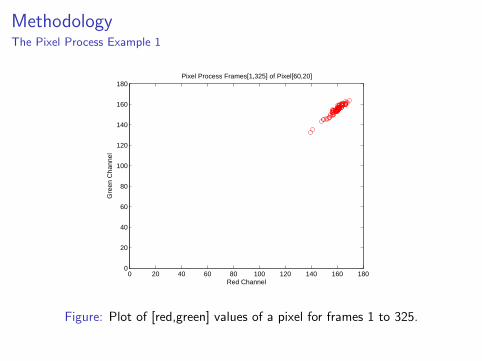
Pixel Process Frames[1,325] of Pixel[60,20]
Figure: Plot of [red,green] values of a pixel for frames 1 to 325.
MethodologyThe Pixel Process Example 1
0 20 40 60 80 100 120 140 160 1800
20
40
60
80
100
120
140
160
180
Red Channel
Gre
en C
hann
el
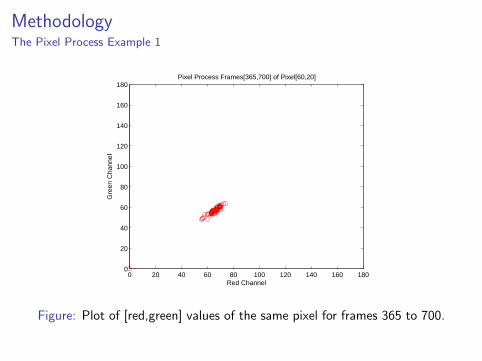
Pixel Process Frames[365,700] of Pixel[60,20]
Figure: Plot of [red,green] values of the same pixel for frames 365 to 700.
MethodologyThe Pixel Process Example 1
Tells us there is a need for an adaptive model.
MethodologyThe Pixel Process Example 2
100 105 110 115 120 125 130 135 140125
130
135
140
145
150
155
160
Red Channel
Gre
en C
hann
el
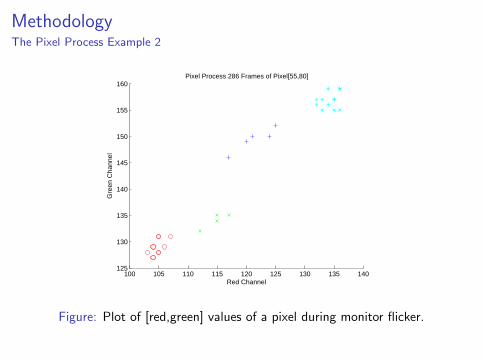
Pixel Process 286 Frames of Pixel[55,80]
Figure: Plot of [red,green] values of a pixel during monitor flicker.
MethodologyThe Pixel Process Example 2
Tells us there is a need for a multi-modal model.
MethodologyProbabilistic Model
Part 1: Probabilistic model for separating the background andforeground.
MethodologyProbabilistic Model: Mixture of Gaussians
Let {X1, . . . , Xt} be a pixel process for X . The probability ofobserving a X at frame t is as follows, where K is the number ofGaussians in the mixture.
P(Xt) =K∑
i=1
weighti ,t ∗ GaussianPDF (Xt , Meansi ,t , Covariancei ,t)
Assume the Covariance matrix is Variance ∗ Identity matrix.

MethodologyProbabilistic Model: Update Parameters
On the next frame, we have a new pixel Xt where t = t + 1. Wemust update our probabilistic model as follows.
Look at each Gaussian in the mixture of pixel Xt .
I If Xt ≤ 2.5 standard deviations from the mean then labelmatched and stop.
I Any Gaussian not matched is labeled unmatched.
MethodologyProbabilistic Model: Update Parameters
From the labeling of each Gaussian we have the following cases.
1. If Gaussiani ,t is marked as matched.
I Increase the weight.
I Adjust the mean closer to Xt .
I Decrease the variance.
2. If Gaussiani ,t is marked as unmatched.
I Decrease the weight.
3. If all the Gaussians in the mixture for pixel Xt are unmatched.
I Mark Xt as a foreground pixel.
I Find least probable Gaussian in the mixture and set:
I Mean = Xt
I Variance as a high valueI weight as a low value
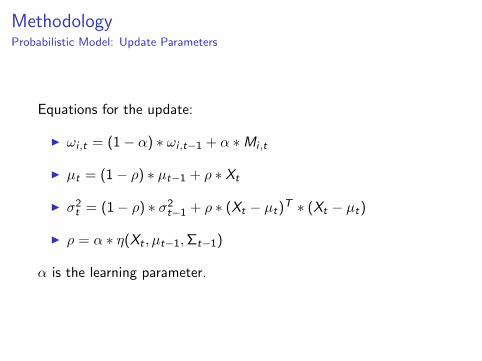
MethodologyProbabilistic Model: Update Parameters
Equations for the update:
I ωi ,t = (1− α) ∗ ωi ,t−1 + α ∗Mi ,t
I µt = (1− ρ) ∗ µt−1 + ρ ∗ Xt
I σ2t = (1− ρ) ∗ σ2
t−1 + ρ ∗ (Xt − µt)T ∗ (Xt − µt)
I ρ = α ∗ η(Xt , µt−1, Σt−1)
α is the learning parameter.
MethodologyProbabilistic Model: Background Heuristic
Since we already have our foreground pixels, we need to determinewhich Gaussians from the mixtures represent the backgroundpixels. We want distributions which have a high weight and lowvariance.
MethodologyProbabilistic Model: Background Heuristic
To find such distributions the following heuristic is proposed.
1. Order the Gaussians of each mixture byweight/standard devation.
2. Sum the weights in this ordering until the sum is greater thana pre-set threshold T .
I Larger T means more pixel values in the background.
3. Use the means from each Gaussian in the sum to representthe background.
MethodologyTracking Technique
Part 2: Technique for tracking objects in the foreground.
MethodologyTracking Technique: Connected Components
We now have the following:
I Model representing the background.
I Marked set of pixels representing the foreground.
The next step is to segment these foreground pixels into connectedcomponents. An algorithm for this is described by Horn [2].
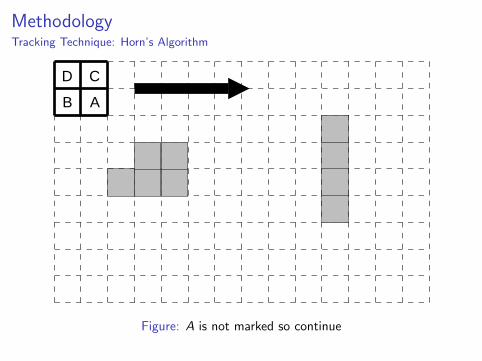
MethodologyTracking Technique: Horn’s Algorithm
A
D C
B
Figure: A is not marked so continue
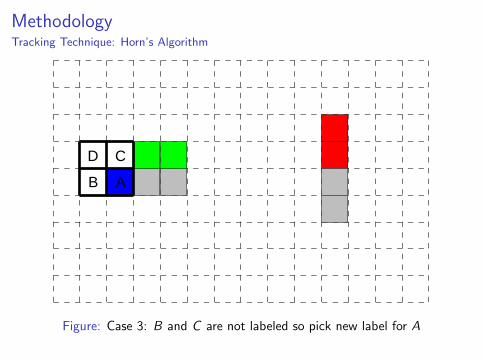
MethodologyTracking Technique: Horn’s Algorithm Cases
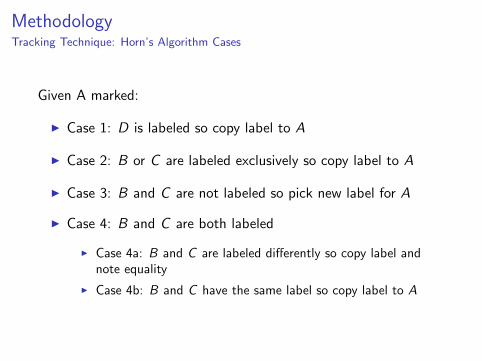
Given A marked:
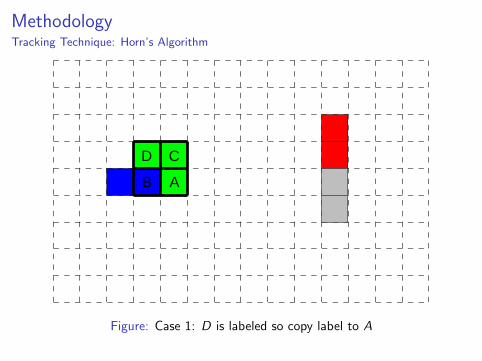
I Case 1: D is labeled so copy label to A
I Case 2: B or C are labeled exclusively so copy label to A
I Case 3: B and C are not labeled so pick new label for A
I Case 4: B and C are both labeled
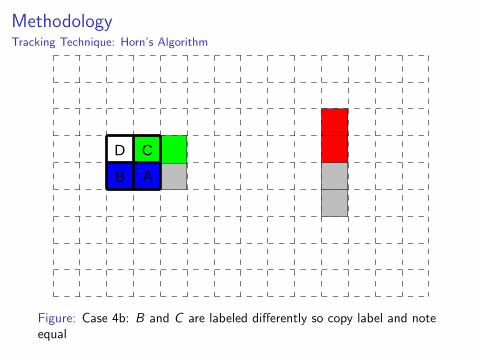
I Case 4a: B and C are labeled differently so copy label andnote equality
I Case 4b: B and C have the same label so copy label to A
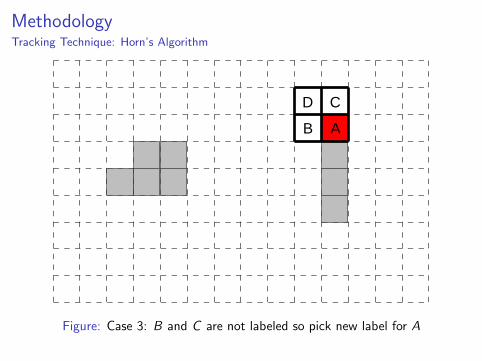
MethodologyTracking Technique: Horn’s Algorithm
A
D C
B
Figure: Case 3: B and C are not labeled so pick new label for A

MethodologyTracking Technique: Horn’s Algorithm
A
D C
B
Figure: Case 2: B or C are labeled exclusively so copy label to A
MethodologyTracking Technique: Horn’s Algorithm
A
D C
B
Figure: Case 3: B and C are not labeled so pick new label for A
MethodologyTracking Technique: Horn’s Algorithm
A
D C
B
Figure: Case 4b: B and C are labeled differently so copy label and noteequal
MethodologyTracking Technique: Horn’s Algorithm
A
D C
B
Figure: Case 1: D is labeled so copy label to A
MethodologyTracking Technique: Horn’s Algorithm
A
D C
B
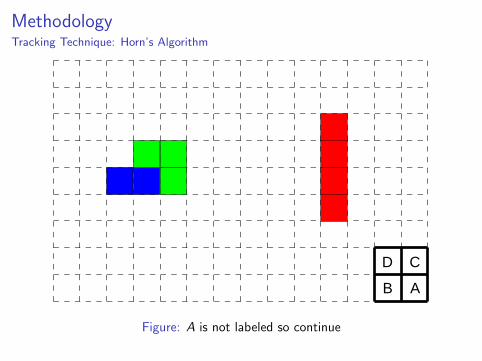
Figure: A is not labeled so continue
MethodologyTracking Technique: Multiple Hypothesis Tracker
The result of Horn’s algorithm is a set of connected componentswe can track across each frame. The essential tool for this is a setof Kalman filters.
Three main steps at each frame:
1. Find the Kalman filter which fits a connected component.
2. Create a new Kalman filter if no existing ones fit.
3. Remove any Kalman filters which are no longer relevant.
Experimentation
The method described has been applied to the following.
I Five outdoor scenes from stationary cameras.
I Technology Square, Cambridge Massachusetts
I Used for over 16 months
I Sun, Overcast, Snow, Rain
I Tracked people and cars
I Other experiments.
I Birds at a feeder, mice at night, fish in a tank, people enteringa lab.

ResultsOvercast Day†
Figure: Original image during anovercast day.
Figure: Foreground detection ofpeople in the scene.
†http://www.ai.mit.edu/projects/vsam/Tracking/index.html
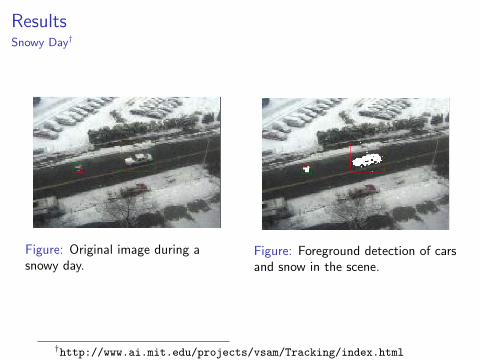
ResultsSnowy Day†
Figure: Original image during asnowy day.
Figure: Foreground detection of carsand snow in the scene.
†http://www.ai.mit.edu/projects/vsam/Tracking/index.html
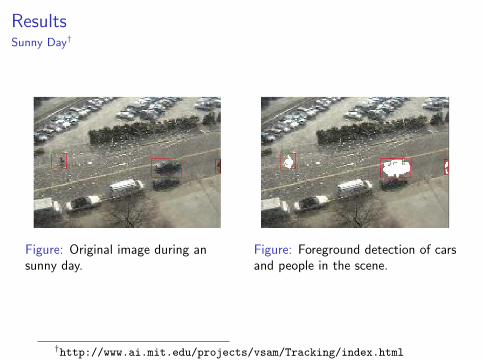
ResultsSunny Day†
Figure: Original image during ansunny day.
Figure: Foreground detection of carsand people in the scene.
†http://www.ai.mit.edu/projects/vsam/Tracking/index.html
ResultsResults Overall
I The Good.
I Robust against rain, snow, sleet, hail, overcast.
I Handles motion from swaying branches, rippling water, noise.
I Works under day and night cycles.
I The Bad.
I Difficulty in full sun (long shadows).
I Very windy and partly cloudy days were also challenges.
I Difficulty with objects overlapping.
I Fast lighting changes were an issue.

ResultsMy Results
Let’s go to the video tape.

DiscussionDrawbacks/Problems
Problems during implementation:
I As time increases, the variance decreases for stable pixels. Ifthe variance gets too small, then noise from the camera ismarked as foreground pixels.
I The mixtures may adapt too quickly to slow moving objectsthat are uniform in color. This will incorporate a foregroundobject into the background.
I The world may not be Gaussian.
DiscussionFuture Work
Authors’:
I More Gaussians in the mixture.
I Full covariance matrix.
I Adding prediction for each Gaussian may improve trackingduring lighting changes.
Me:
I If more than one Gaussian in a mixture can be matched to thenew pixel, pick the closest.
I Factor in the weight when finding the least probabledistribution to replace.
I Fish! (If you have pet fish, I’m very interested)

Feedback
Comments / Questions / Suggestions
References
[1] W.E.L Grimson, C. Stauffer, R. Romano, and L. Lee. Usingadaptive tracking to classify and monitor activities in a site. InComputer Vision and Pattern Recognition, pages 22–29, 1998.
[2] B.K.P. Horn. Robot Vision. The MIT Press McGraw-Hill BookCompany, 1986.
[3] Christof Ridder, Olaf Munkelt, and Harald Kirchner. Adaptivebackground estimation and foreground detection usingkalman-filtering. In International Conference on recentAdvances in Mechatronics, pages 193–199, 1995.
[4] Chris Stauffer and W.E.L Grimson. Adaptive backgroundmixture models for real-time tracking. In Computer Vision andPattern Recognition, volume 2, pages 252–258, 1999.
[5] Christopher R. Wren, Ali Azarbayejani, Trevor Darrell, andAlex Pentland. Pfinder: Real-time tracking of the human body.In Pattern Analysis and Machine Intelligence, volume 19,pages 780–785, 1997.





