Embed Size (px)
Citation preview
Aircraft System Identification
Using Artificial Neural Networks
Kenton Kirkpatrick
Jim May Jr.
John ValasekJohn Valasek
Aerospace Engineering Department
Texas A&M University
51st AIAA Aerospace Sciences Meeting
January 9, 2013
Compos Volatus
Overview
� Motivation
� System Identification
� Artificial Neural Networks
2
� Artificial Neural Networks
� ANNSID
� Conclusions and Open Challenges
Motivation
3
Motivating Questions
� Is it possible to use artificial neural networks to determine a linear model
for an aircraft based on experimental data?
� Would a linear model determined by an artificial neural network be able to
accurately model behaviors not present in the training data?
4
accurately model behaviors not present in the training data?
� How would an artificial neural network-determined linear model compare
to other accepted methods of aircraft system identification?
Motivation
� System identification
o Some methods are only accurate under strict conditions
o Determining accurate solutions can be time consuming
o Currently accepted accurate solutions require learning parameters
independently or Kalman filtering
5
� Artificial neural networks
o Require minimal user input
o Easily implemented
o Robust to noise
o Fast

System Identification
6
System Identification
� Identification of linear model for aircraft systems
o Requires experimentally determined data, including state response to
control inputs and excitation of modes
o Separate linear models are generally determined for longitudinal and
lateral/directional modes
� Linear models are needed to analyze stability and determine control policies
� Identifying a linear model requires determining:
7
� Identifying a linear model requires determining:
o State matrix, A
o Control matrix, B
o Output matrix, C
o Carry-through matrix, D
1k k k
k kk
x Ax Bu
y C x Du
+ = +
= +

Longitudinal Linear Model
� Longitudinal Motion
o Covers motion that occurs in the pitching plane
o Includes forward velocity, vertical velocity (or angle-of-attack), pitch
angle, and pitch rate
o Controls include elevator deflection and thrust
[ ]T
x u qα θ=
8
Vα
u q
θ
[ ]x u qα θ=
[ ]T
e Tu δ δ=
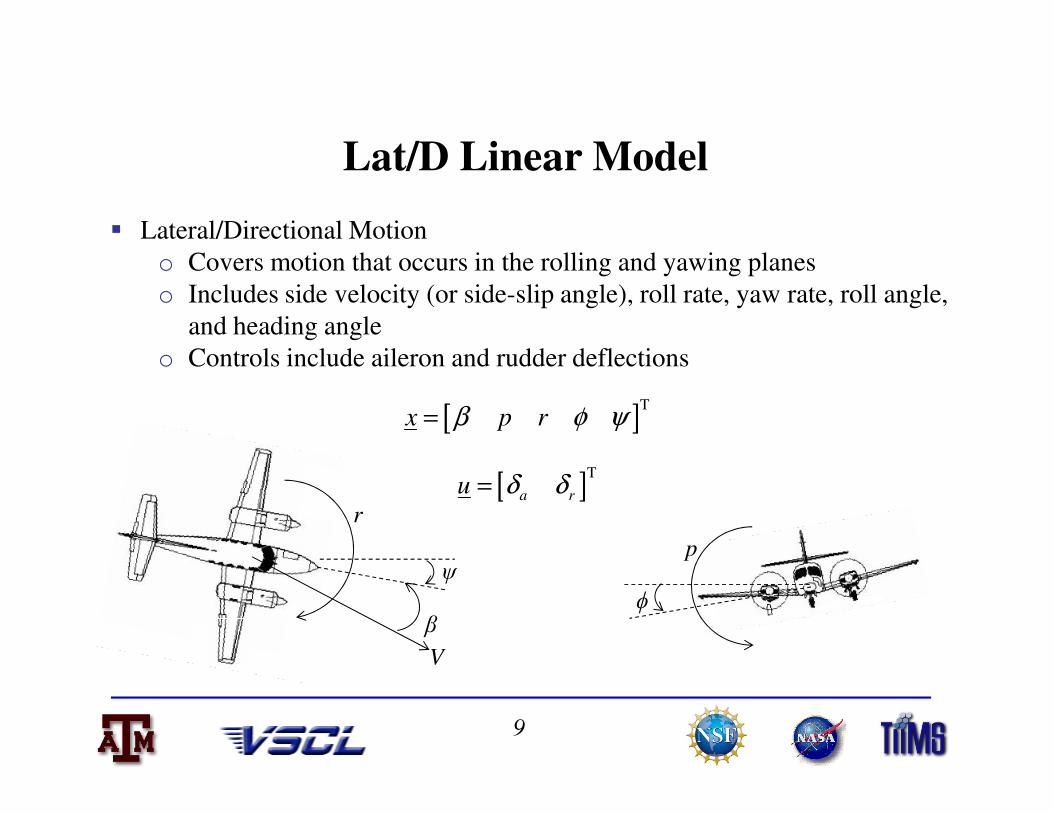
Lat/D Linear Model
� Lateral/Directional Motion
o Covers motion that occurs in the rolling and yawing planes
o Includes side velocity (or side-slip angle), roll rate, yaw rate, roll angle,
and heading angle
o Controls include aileron and rudder deflections
[ ]T
x p rβ φ ψ=
9
[ ]T
x p rβ φ ψ=
[ ]T
a ru δ δ=
V
βϕ
ψ
r
p
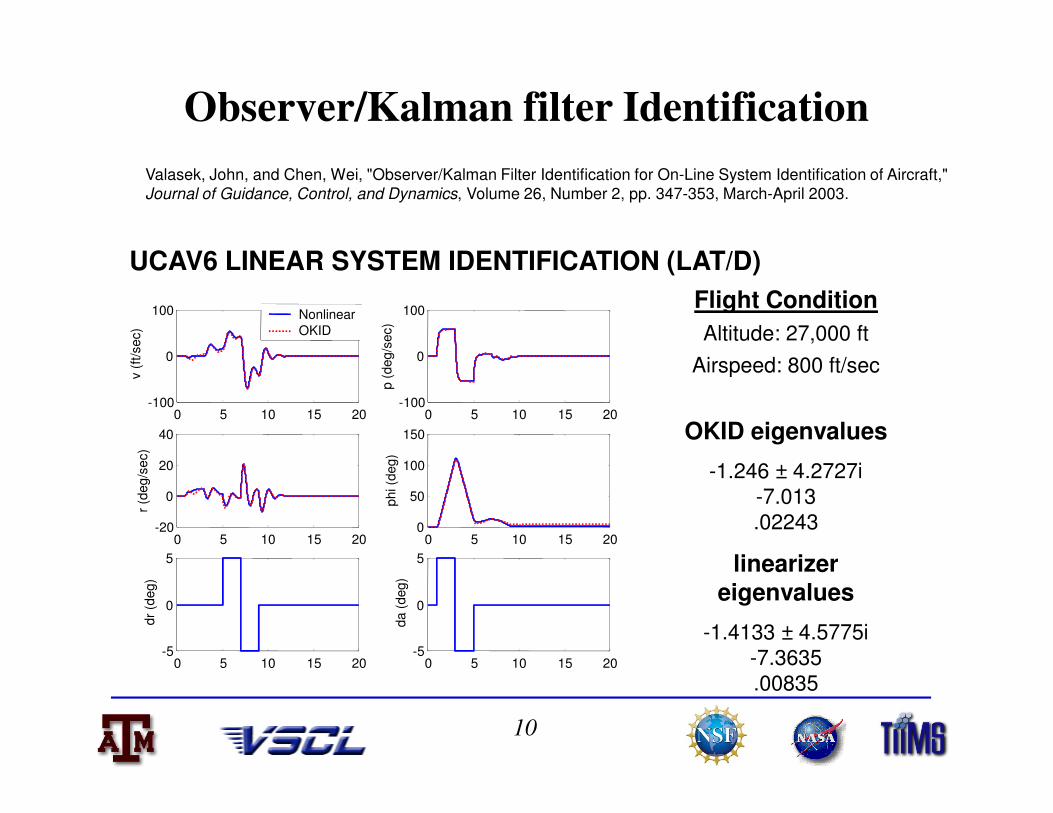
Observer/Kalman filter Identification
-100
0
100
v (
ft/s
ec)
Nonlinear
OKID
-100
0
100
p (
deg/s
ec)
Flight Condition
Altitude: 27,000 ft
Airspeed: 800 ft/sec
UCAV6 LINEAR SYSTEM IDENTIFICATION (LAT/D)
Valasek, John, and Chen, Wei, "Observer/Kalman Filter Identification for On-Line System Identification of Aircraft,"
Journal of Guidance, Control, and Dynamics, Volume 26, Number 2, pp. 347-353, March-April 2003.
10
0 5 10 15 20-100
0 5 10 15 20-100
0 5 10 15 20-20
0
20
40
r (d
eg/s
ec)
0 5 10 15 200
50
100
150
phi (d
eg)
0 5 10 15 20-5
0
5
dr
(deg)
0 5 10 15 20-5
0
5
da (
deg)
OKID eigenvalues
-1.246 ± 4.2727i
-7.013
.02243
linearizer
eigenvalues
-1.4133 ± 4.5775i
-7.3635
.00835
Artificial Neural Networks
11
Networks
Artificial Neural Networks
� Class of machine learning algorithms designed
to mimic the learning behavior of true neural
networks
� Actual neural networks are created by complex
12
� Actual neural networks are created by complex
interactions between neurons that pass
electrochemical signals between each other
� Artificial neural networks are an attempt to
mimic this behavior by creating virtual units that
process and pass numerical information between
members of a network of units
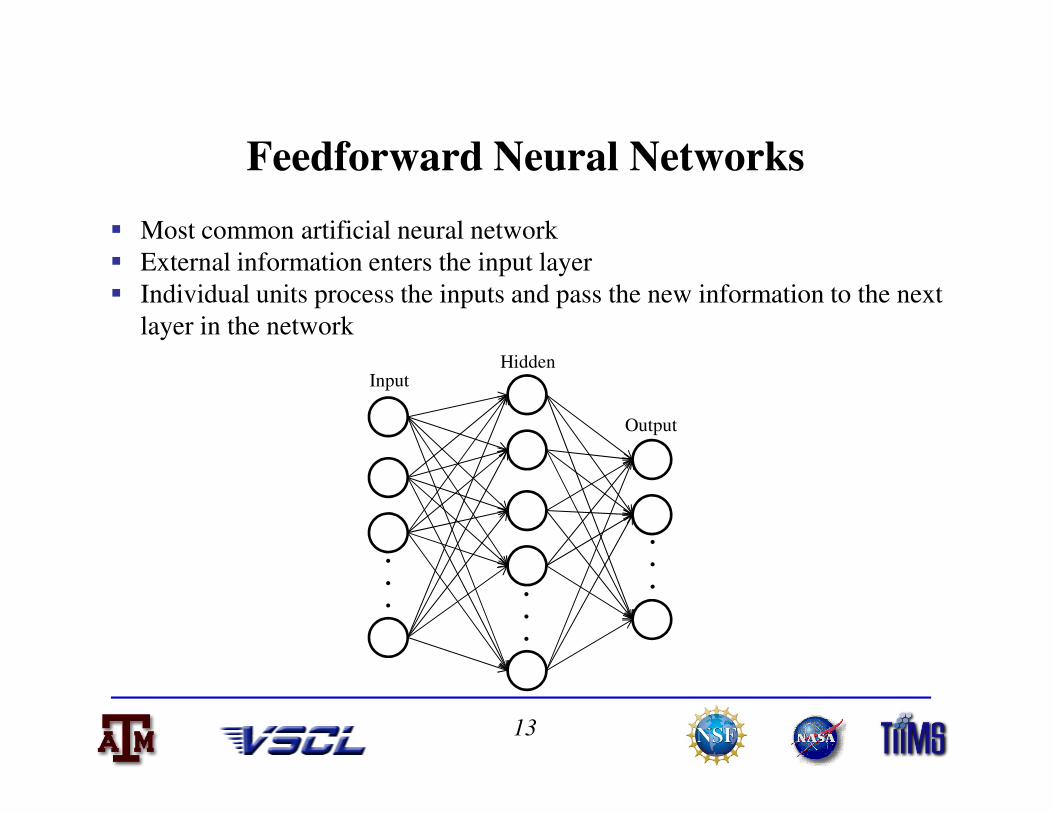
Feedforward Neural Networks
� Most common artificial neural network
� External information enters the input layer
� Individual units process the inputs and pass the new information to the next
layer in the network
InputHidden
13
.
.
. ...
.
.
.
Output
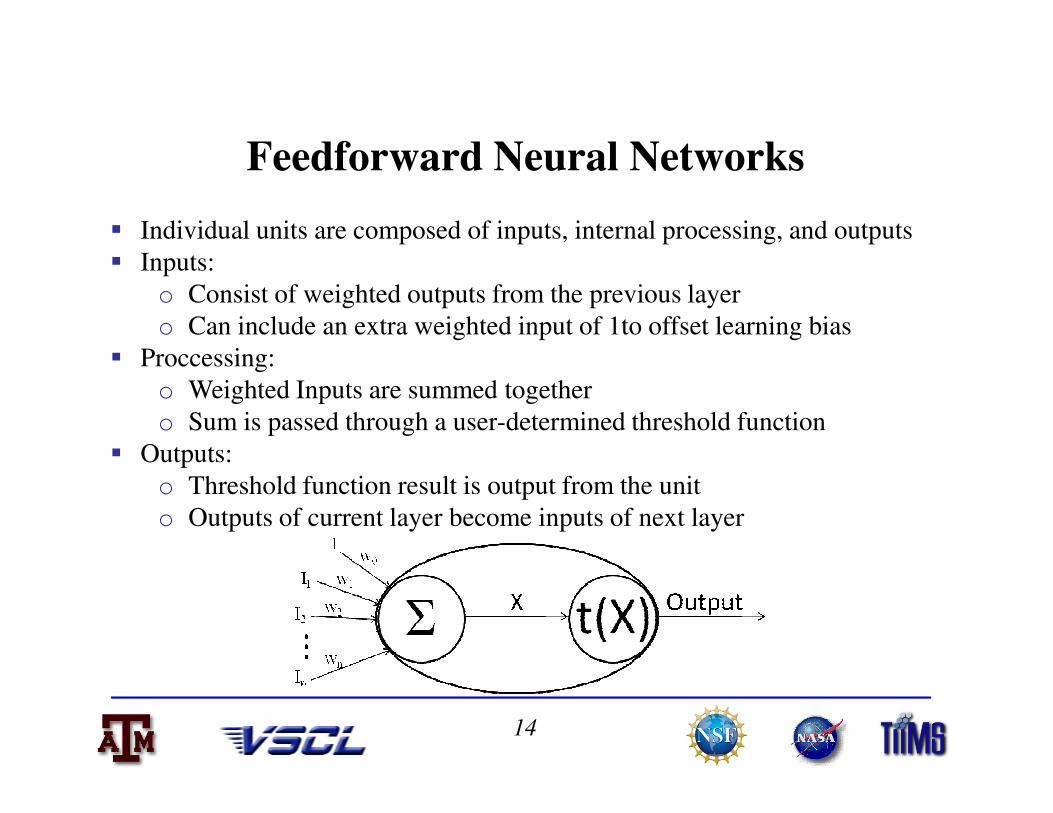
Feedforward Neural Networks
� Individual units are composed of inputs, internal processing, and outputs
� Inputs:
o Consist of weighted outputs from the previous layer
o Can include an extra weighted input of 1to offset learning bias
� Proccessing:
o Weighted Inputs are summed together
Sum is passed through a user-determined threshold function
14
o Sum is passed through a user-determined threshold function
� Outputs:
o Threshold function result is output from the unit
o Outputs of current layer become inputs of next layer
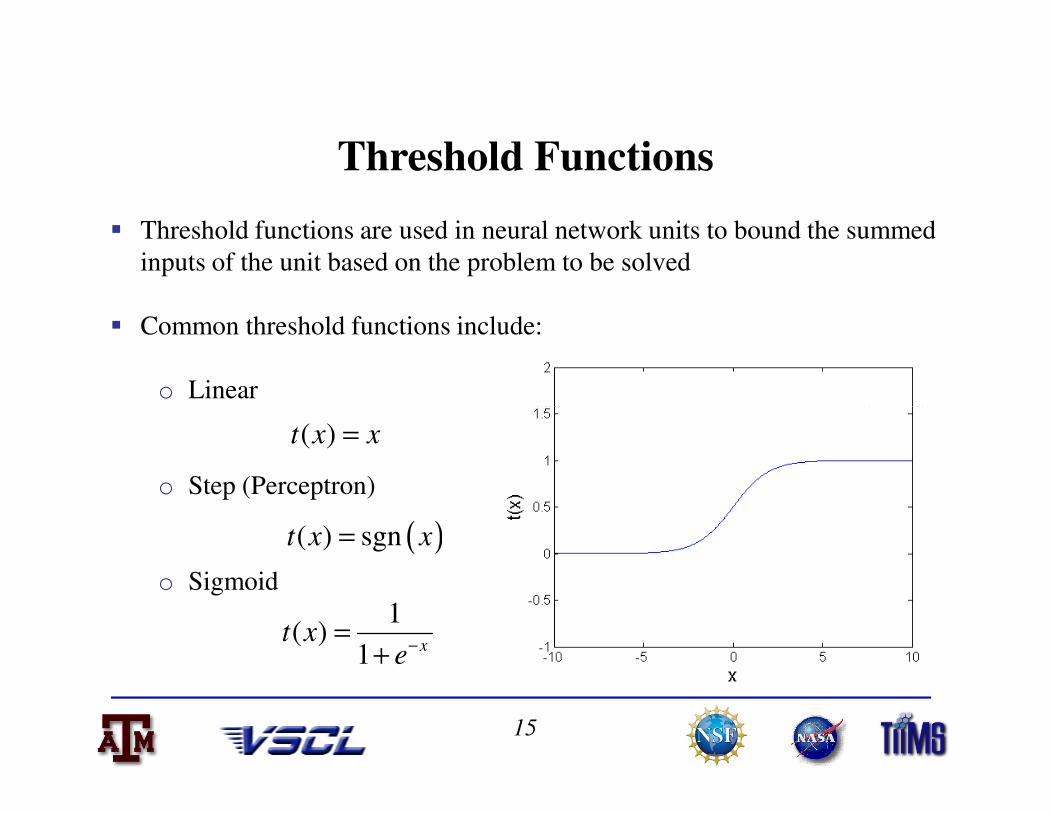
Threshold Functions
� Threshold functions are used in neural network units to bound the summed
inputs of the unit based on the problem to be solved
� Common threshold functions include:
o Linear
15
o Step (Perceptron)
o Sigmoid
( )t x x=
( )( ) sgnt x x=
1( )
1 xt x
e−
=+
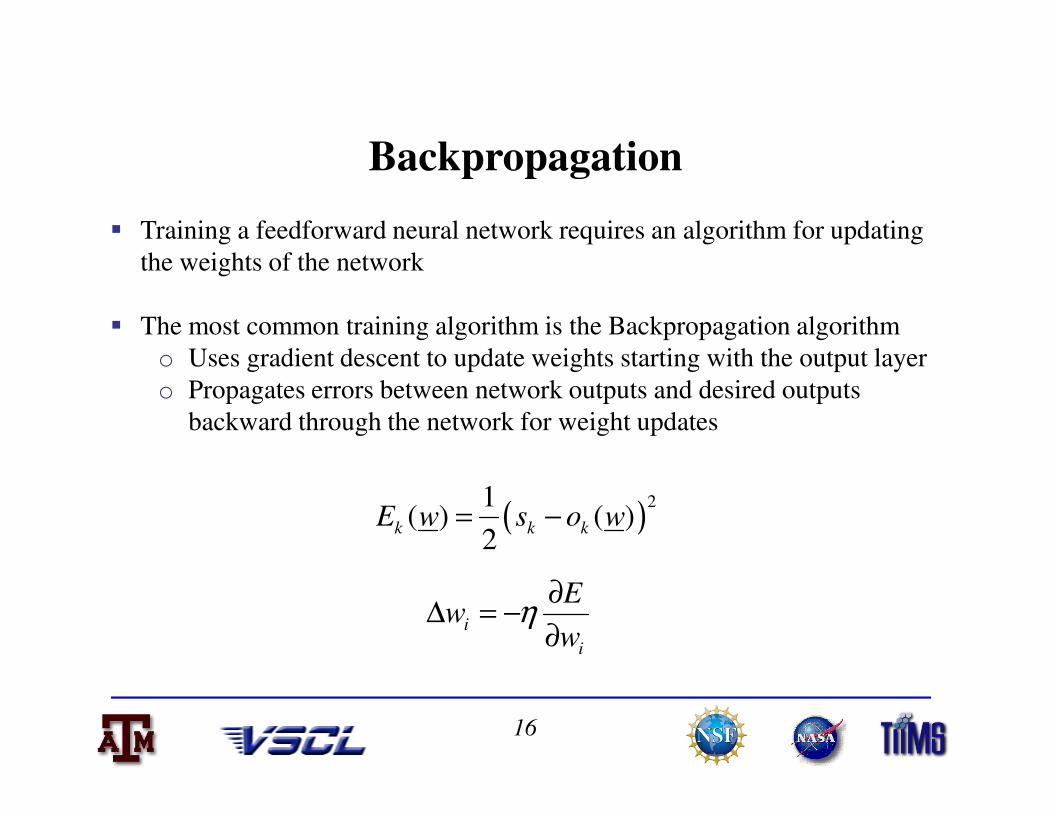
Backpropagation
� Training a feedforward neural network requires an algorithm for updating
the weights of the network
� The most common training algorithm is the Backpropagation algorithm
o Uses gradient descent to update weights starting with the output layer
o Propagates errors between network outputs and desired outputs
backward through the network for weight updates
16
backward through the network for weight updates
( )21
( ) ( )2
k k kE w s o w= −
i
i
Ew
wη
∂∆ = −
∂
ANNSID
17

ANNSID
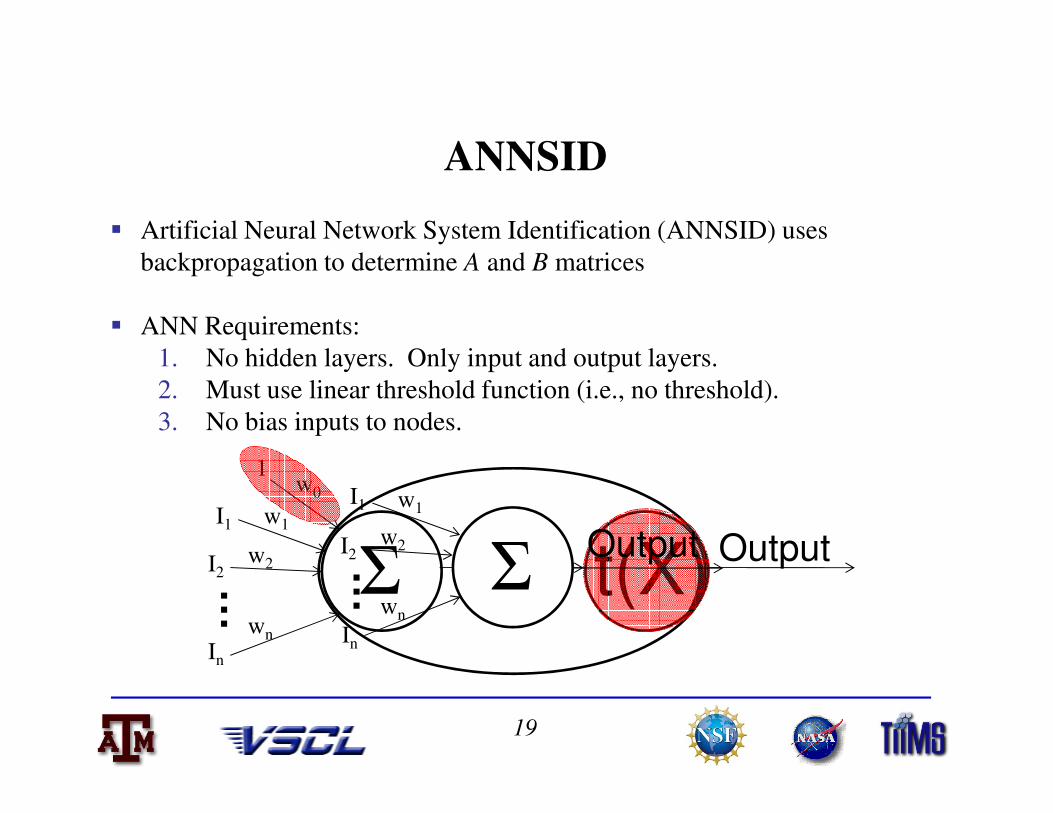
� Artificial Neural Network System Identification (ANNSID) uses
backpropagation to determine A and B matrices
� ANN Requirements:
1. No hidden layers. Only input and output layers.
InputHidden
Input
18
.
.
.
Input
.
.
.
Hidden
.
.
.
OutputOutput
ANNSID
� Artificial Neural Network System Identification (ANNSID) uses
backpropagation to determine A and B matrices
� ANN Requirements:
1. No hidden layers. Only input and output layers.
2. Must use linear threshold function (i.e., no threshold).
3. No bias inputs to nodes.
19
3. No bias inputs to nodes.
OutputΣ
X t(X)
1w0
I1
I2...In
w1
w2
wn
OutputΣ
I1
I2...In
w1
w2
wn
ANNSID
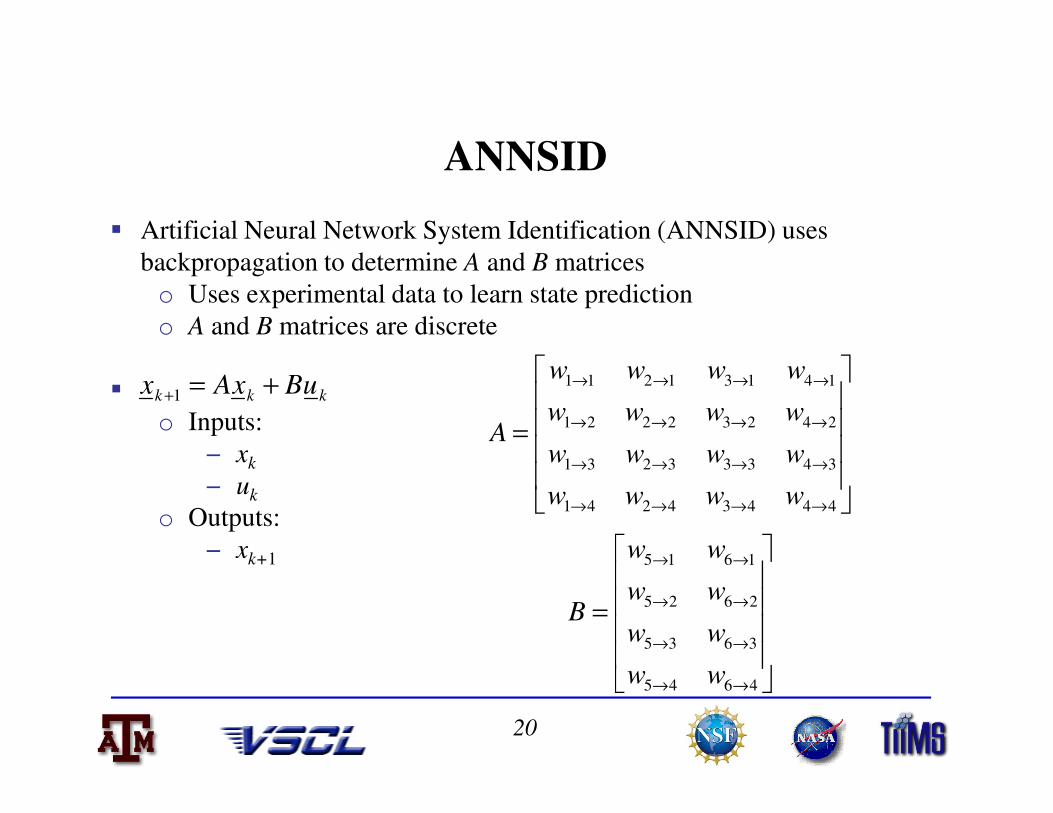
� Artificial Neural Network System Identification (ANNSID) uses
backpropagation to determine A and B matrices
o Uses experimental data to learn state prediction
o A and B matrices are discrete
�
Inputs:1k k kx Ax Bu+ = + 1 1 2 1 3 1 4 1w w w w
w w w w
→ → → →
20
o Inputs:
− xk
− uk
o Outputs:
− xk+1
1 2 2 2 3 2 4 2
1 3 2 3 3 3 4 3
1 4 2 4 3 4 4 4
w w w wA
w w w w
w w w w
→ → → →
→ → → →
→ → → →
=
5 1 6 1
5 2 6 2
5 3 6 3
5 4 6 4
w w
w wB
w w
w w
→ →
→ →
→ →
→ →
=
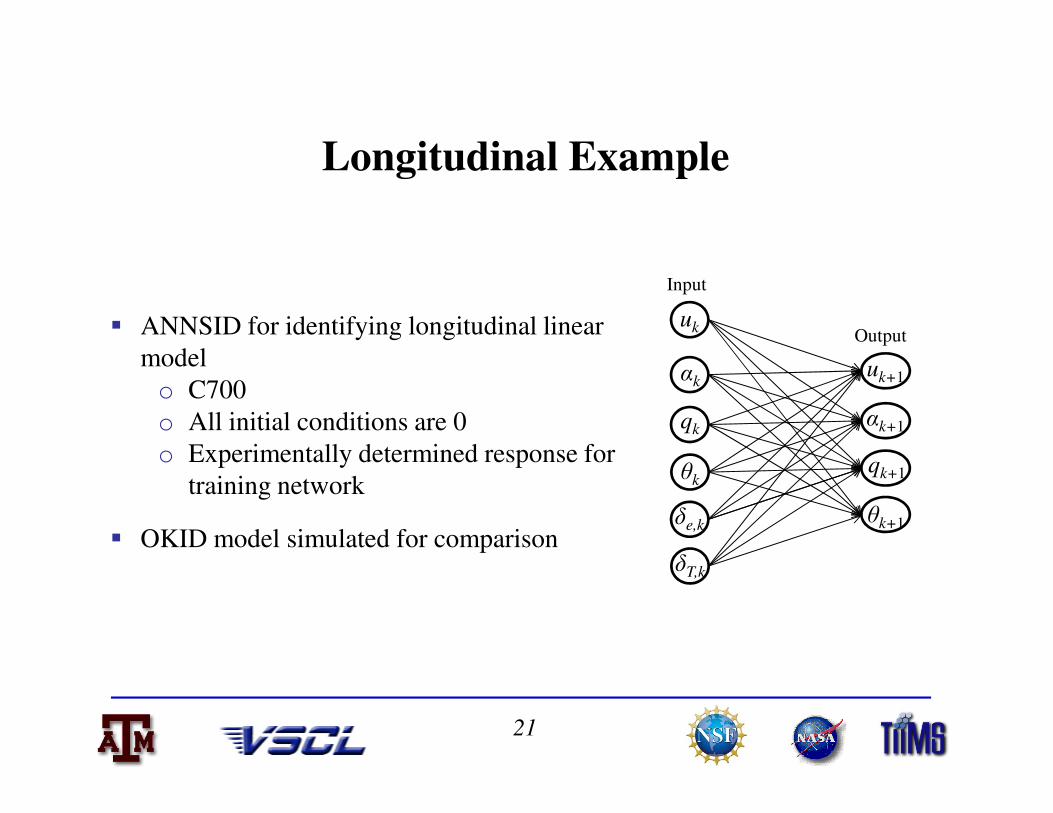
Longitudinal Example
� ANNSID for identifying longitudinal linear
model
o C700
All initial conditions are 0
Input
Outputuk
αk
q
uk+1
α
21
o All initial conditions are 0
o Experimentally determined response for
training network
� OKID model simulated for comparison
qk
θk
δe,k
δT,k
αk+1
qk+1
θk+1

Longitudinal Example
0.1462 0.3697 0.1647 0.5904
0.0834 0.3808 0.7905 0.0177
0.0285 0.1274 2.1541 0.1341
0.0078 0.0010 0.8567 0.0027
ANNSID
longA
− − − − − − = − −
− −
0.2371 0.3715 0.0517 0.6304− − − −
0.6635 0.1235
0.6236 0.0051
7.8345 0.0006
0.4836 0.0007
ANNSID
longB
− − = − − − −
0.4012 0.1241−
22
0.1394 1.0602 0.9127 0.0230
0.0918 0.2402 2.0719 0.1316
0.0129 0.0450 0.8722 0.0080
OKID
longA
− − − = − −
−
0.6219 0.0001
7.1121 0.0036
0.6369 0.0003
OKID
longB
− − = − − −
ANNSID OKID
λ1,2 = -0.2187 ± 0.1667j λ1,2 = -0.1384 ± 0.1364j
λ3 = -2.1564 λ3 = -2.2396
λ4 = -0.0901 λ4 = -0.8609

Longitudinal Example
23

Longitudinal Example
24

Longitudinal Example
25
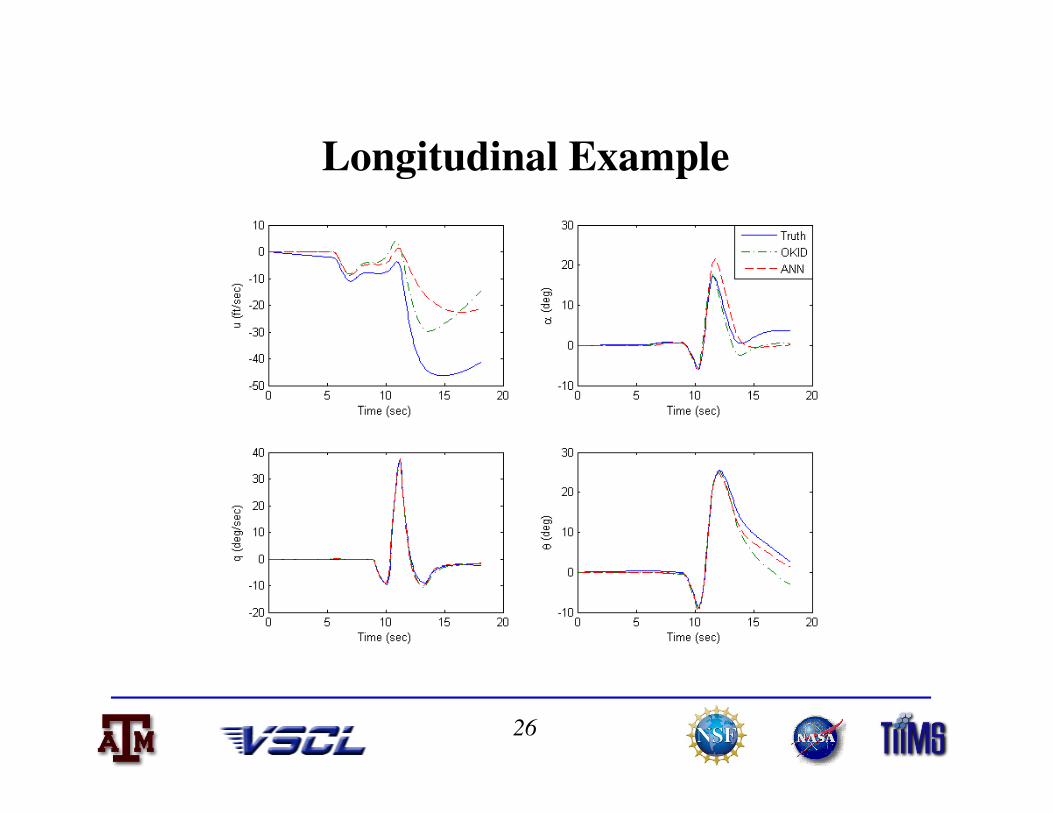
Longitudinal Example
26
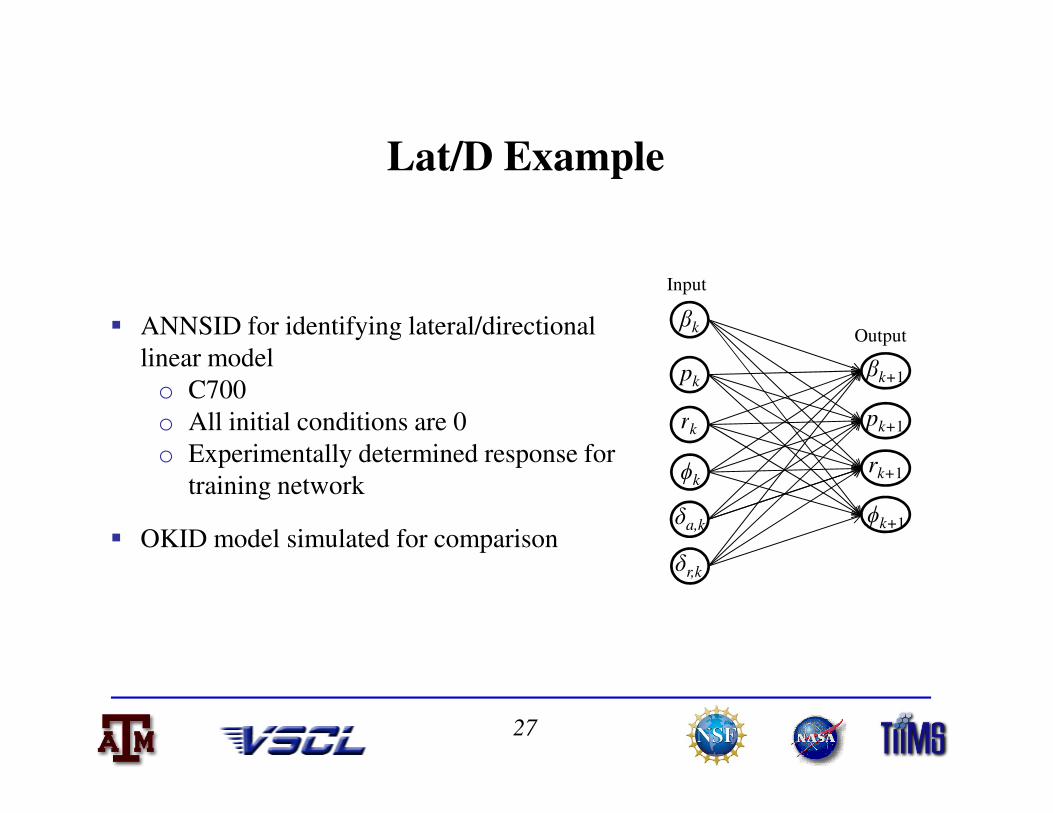
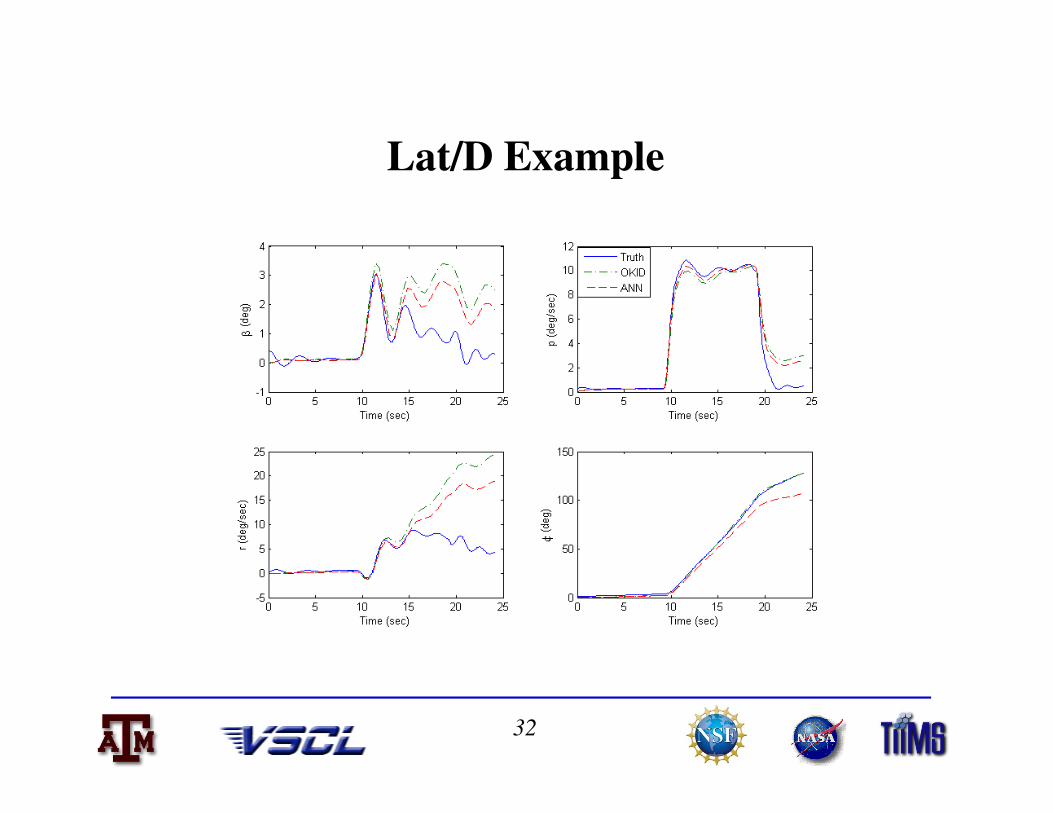
Lat/D Example
� ANNSID for identifying lateral/directional
linear model
o C700
All initial conditions are 0
Input
Outputβk
pk
r
βk+1
p
27
o All initial conditions are 0
o Experimentally determined response for
training network
� OKID model simulated for comparison
rk
ϕk
δa,k
δr,k
pk+1
rk+1
ϕk+1

Lat/D Example
/
0.1688 0.0102 0.9895 0.1749
1.2807 2.3198 0.1820 0.0042
3.6614 0.5574 0.2284 0.0053
0.0992 0.8402 0.0288 0.0047
ANNSID
lat dA
− − − − − = − − −
−
0.1718 0.0185 0.9994 0.1919− − −
/
0.0037 0.0014
2.2508 0.2005
0.0022 0.6712
0.1341 0.0126
ANNSID
lat dB
− = − − −
0.0021 0.0282−
28
/
1.0393 2.1342 0.1275 0.0018
3.4943 0.5350 0.2464 0.0019
0.0653 0.8935 0.0362 0.0045
OKID
lat dA
− = − − −
/
1.9976 0.2653
0.0794 0.6607
0.1886 0.0231
OKID
lat dB
− = −
−
ANNSID OKID
λ1,2 = -0.2760 ± 1.8554j λ1,2 = -0.2832 ± 1.8300j
λ3 = -2.1790 λ3 = -2.0162
λ4 = 0.0187 λ4 = 0.0311
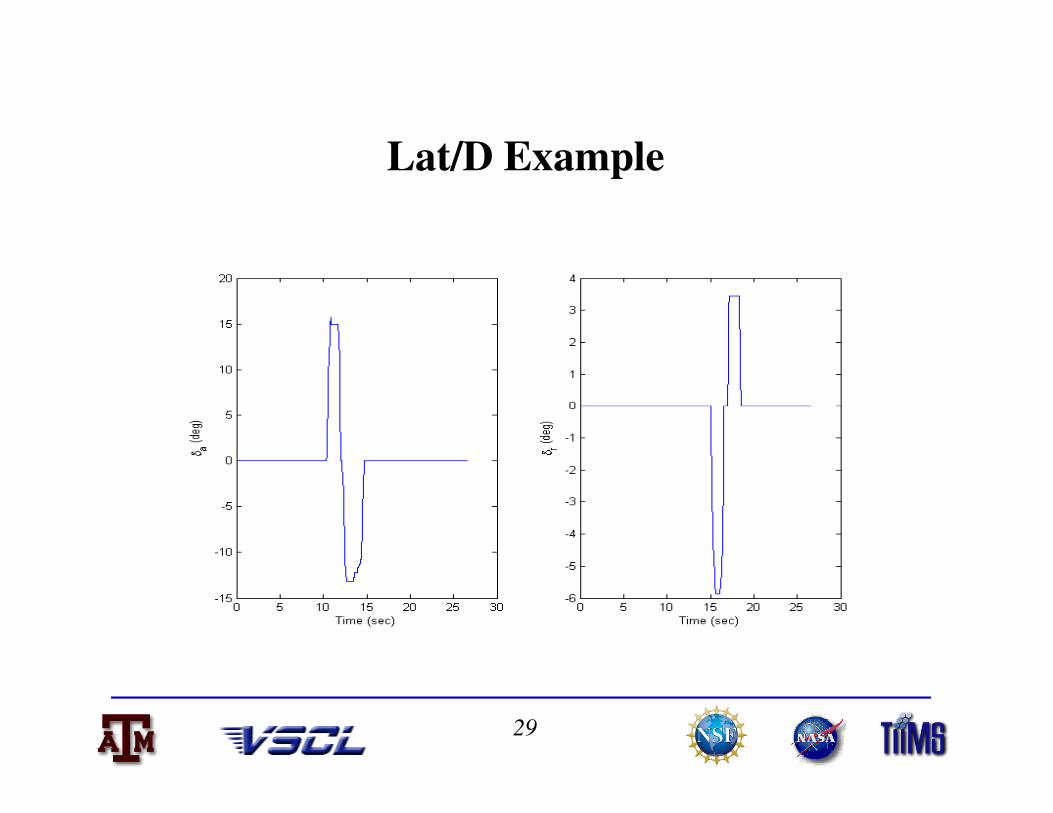
Lat/D Example
29

Lat/D Example
30
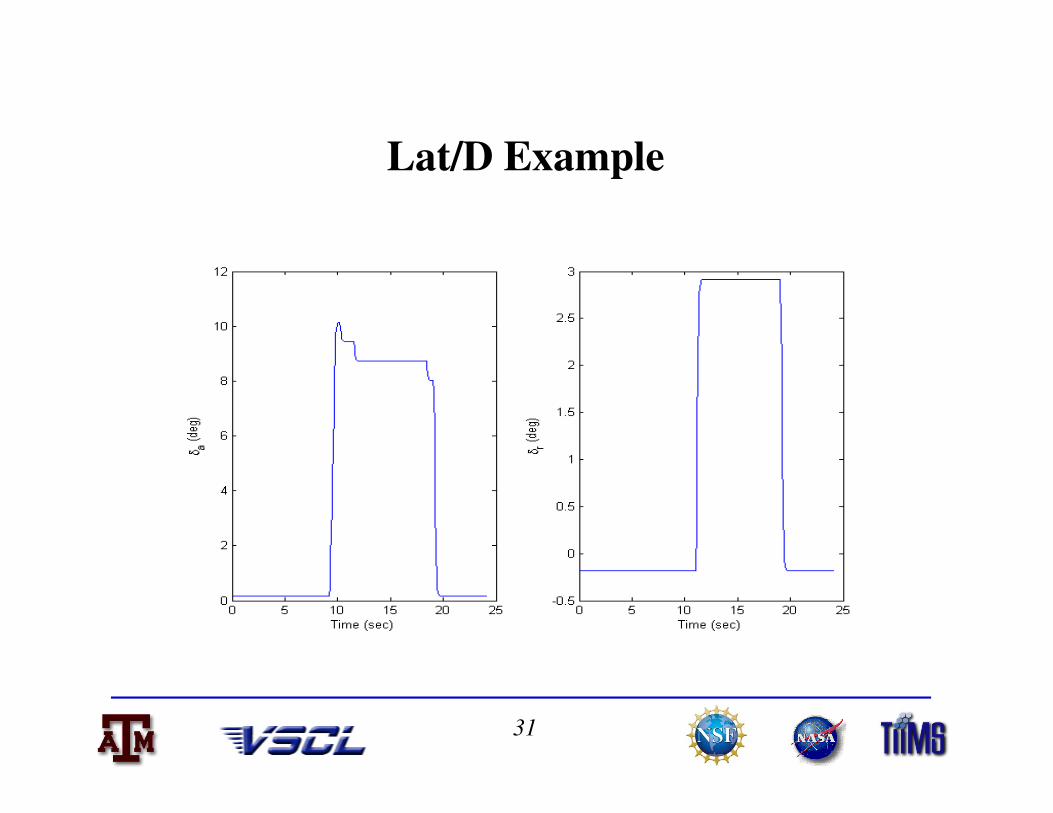
Lat/D Example
31
Lat/D Example
32
Conclusionsand
33
andOpen Challenges
Conclusions
� Accurate aircraft linear models for longitudinal and lateral/directional
motion can be determined using an artificial neural network
o Resulting matrices are comparable to OKID
o Works well on inputs not used in training
� The network must be restricted for network weights to be equivalent to A
34
� The network must be restricted for network weights to be equivalent to A
and B matrices
o No hidden layers
o Linear threshold
o No bias input
o Inputs of current state and control, outputs of next state
� ANNSID is able to learn accurate models quickly (< 8 seconds CPU time
for scenarios tested)
Open Challenges
� Determine full linear model
o Use ANNSID formulation to determine linear models that include
longitudinal and lateral/directional coupling
o Will require flight conditions involving inputs from all controls
� Learn models for aircraft of different types
35
� Learn models for aircraft of different types
o Investigate more aircraft similar to the C700
o Investigate modeling of high-performance aircraft
o Investigate modeling UAVs
� Investigate using ANNSID-determined models for control
o Develop feedback control laws using linear model
o Test control laws using the linear model on real aircraft
Questions?
36