Embed Size (px)
Citation preview
9955LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
Aktoren für anspruchsvolle Fahrwerke –Clevere Mechanik entlastetElektromotoren
Manfred Kraus
Der Trend zum trockenen Chassis und diebedarfsorientierte Ansteuerung von Aktoren zurVerringerung des Kraftstoffverbrauches („Avoi-ding of parasitic losses“) sind wichtige Gründefür die Entwicklung von elektromechanischenAktoren.
Der zunehmende Fortschritt auf dem Gebiet derMikroelektronik und die Kombination/Integrati-on von Sensorik, elektromechanischer Aktorikund Software eröffnen vollständig neue Möglich-keiten zur Steigerung der aktiven Sicherheit vonFahrzeugen und zur weiteren Ausnutzung vonFunktionspotenzialen im Fahrwerk.
Die elektromechanische Aktorik für Fahrwerkebeinhaltet u.a. neben Brems- und Lenkungsyste-men auch adaptive Dämpfersysteme in Vertikal-richtung sowie Aktoren zur Einstellung von Sturz-,Vorspur- und Wankwinkel. Darüber hinaus wirdes neue Anwendungsfelder im Fahrwerksbereichfür elektromechanische Aktoren geben, z.B. alsaktive Tilger zur Entkopplung des Hilfsrahmensgegenüber dem Fahrzeugaufbau.
Die heute noch vorhandene Leistungsgrenzeaufgrund des 12-V-Bordnetzes wird in zuneh-mendem Maß verschoben, wenn in naherZukunft Hybrid-Fahrzeuge und leistungsfähige-re Bordnetze mit mehr als 12 V zur Verfügungstehen. Dies entbindet aber nicht von einernoch effektiveren Nutzung der vom Verbren-
nungsmotor bzw. dem Bordnetz zur Verfügunggestellten Energie.
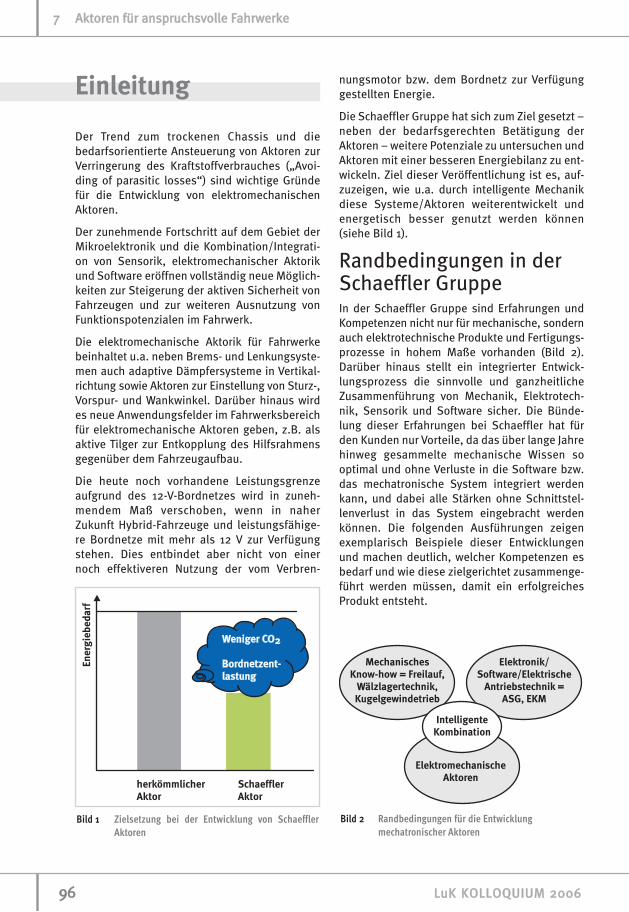
Die Schaeffler Gruppe hat sich zum Ziel gesetzt –neben der bedarfsgerechten Betätigung derAktoren – weitere Potenziale zu untersuchen undAktoren mit einer besseren Energiebilanz zu ent-wickeln. Ziel dieser Veröffentlichung ist es, auf-zuzeigen, wie u.a. durch intelligente Mechanikdiese Systeme/Aktoren weiterentwickelt undenergetisch besser genutzt werden können(siehe Bild 1).
Randbedingungen in derSchaeffler GruppeIn der Schaeffler Gruppe sind Erfahrungen undKompetenzen nicht nur für mechanische, sondernauch elektrotechnische Produkte und Fertigungs-prozesse in hohem Maße vorhanden (Bild 2).Darüber hinaus stellt ein integrierter Entwick-lungsprozess die sinnvolle und ganzheitlicheZusammenführung von Mechanik, Elektrotech-nik, Sensorik und Software sicher. Die Bünde-lung dieser Erfahrungen bei Schaeffler hat fürden Kunden nur Vorteile, da das über lange Jahrehinweg gesammelte mechanische Wissen sooptimal und ohne Verluste in die Software bzw.das mechatronische System integriert werdenkann, und dabei alle Stärken ohne Schnittstel-lenverlust in das System eingebracht werdenkönnen. Die folgenden Ausführungen zeigenexemplarisch Beispiele dieser Entwicklungenund machen deutlich, welcher Kompetenzen esbedarf und wie diese zielgerichtet zusammenge-führt werden müssen, damit ein erfolgreichesProdukt entsteht.
9966 LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
77 AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee
Einleitung
Bild 1 Zielsetzung bei der Entwicklung von SchaefflerAktoren
Bild 2 Randbedingungen für die Entwicklung mechatronischer Aktoren

Wankstabilisierung Merkmale, Aufbau, FunktionDer passive Stabilisator ist als Drehstabfederausgeführt. Er muss den Zielkonflikt zwischenausreichender Steifigkeit zur Verringerung derSeitenneigung (Wankbewegung/-winkel) beiKurvenfahrt und ausreichender Nachgiebigkeitbei einseitiger Störanregung z.B. beim einseiti-gen Überfahren einer Schwelle (zur Verringerungder Vertikalbewegung der Karosserie) lösen.
Als aktive Aktoren werden heute hydraulischeAktoren eingesetzt, die einen geteilten Drehstabwährend der Kurvenfahrt in Abhängigkeit vonder Querbeschleunigung verdrehen und so dieKarosserieneigung spürbar verringern (Bild 3).Bei Geradeausfahrt und einseitiger Stör-anregung muss der Stabilisator „offen“ wirken,was ein Komfortgewinn gegenüber einem passi-ven Stabilisator darstellt. Die Karosserieneigungkann auch durch radselektiv hydraulisch verstell-bare Federbeine verhindert werden, die nebender Wank- auch die Nickbewegung beim Brem-sen und Beschleunigen eliminieren können.Luftgefederte Systeme sind aufgrund der hohenKompressibilität der Luft dazu nicht geeignet.
Die Anforderungen anein Wankstabilisie-rungssystem für dieobere Mittelklassesind in Bild 4 zusam-mengefasst.
Der Ansatz, den Aktornur noch bedarfsgerechtanzusteuern, führt zueinem elektrischenWankstabilisator be-stehend aus E-Motormit ECU (ElectronicControl Unit = Steuer-gerät) und einem Rota-tivgetriebe mit hoherÜbersetzung (Bild 5).
Die Schaeffler Gruppehat sich zum Zielgesetzt, die Energie-bilanz des Aktors
9977LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee 77
Bild 4 Anforderungen an eine Wankstabilisierung für einFahrzeug der oberen Mittelklasse
Bild 3 Funktion der Wankstabilisierung
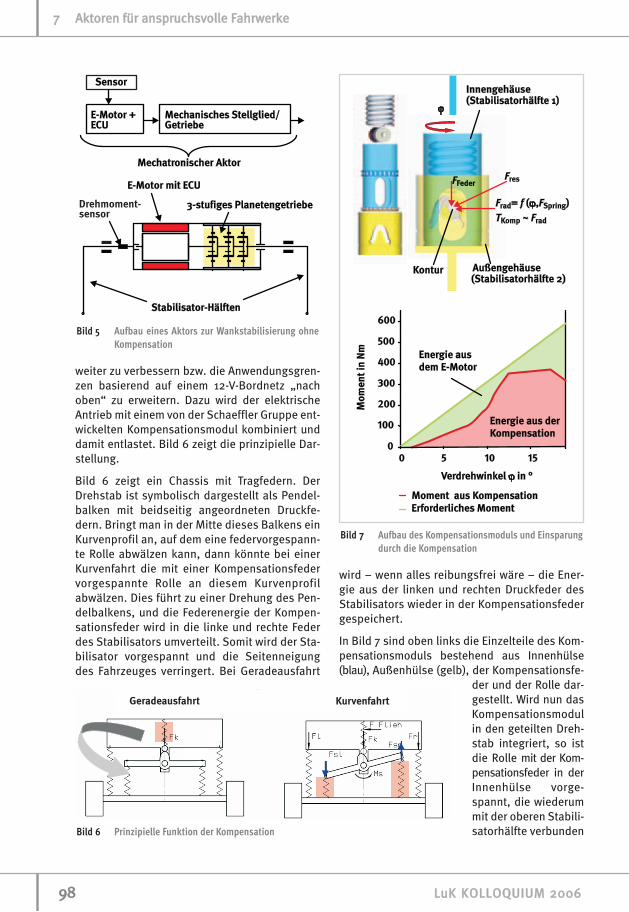
weiter zu verbessern bzw. die Anwendungsgren-zen basierend auf einem 12-V-Bordnetz „nachoben“ zu erweitern. Dazu wird der elektrischeAntrieb mit einem von der Schaeffler Gruppe ent-wickelten Kompensationsmodul kombiniert unddamit entlastet. Bild 6 zeigt die prinzipielle Dar-stellung.
Bild 6 zeigt ein Chassis mit Tragfedern. DerDrehstab ist symbolisch dargestellt als Pendel-balken mit beidseitig angeordneten Druckfe-dern. Bringt man in der Mitte dieses Balkens einKurvenprofil an, auf dem eine federvorgespann-te Rolle abwälzen kann, dann könnte bei einerKurvenfahrt die mit einer Kompensationsfedervorgespannte Rolle an diesem Kurvenprofilabwälzen. Dies führt zu einer Drehung des Pen-delbalkens, und die Federenergie der Kompen-sationsfeder wird in die linke und rechte Federdes Stabilisators umverteilt. Somit wird der Sta-bilisator vorgespannt und die Seitenneigungdes Fahrzeuges verringert. Bei Geradeausfahrt
wird – wenn alles reibungsfrei wäre – die Ener-gie aus der linken und rechten Druckfeder desStabilisators wieder in der Kompensationsfedergespeichert.
In Bild 7 sind oben links die Einzelteile des Kom-pensationsmoduls bestehend aus Innenhülse(blau), Außenhülse (gelb), der Kompensationsfe-
der und der Rolle dar-gestellt. Wird nun dasKompensationsmodulin den geteilten Dreh-stab integriert, so istdie Rolle mit der Kom-pensationsfeder in derInnenhülse vorge-spannt, die wiederummit der oberen Stabili-satorhälfte verbunden
9988 LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
77 AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee
Bild 6 Prinzipielle Funktion der Kompensation
Bild 5 Aufbau eines Aktors zur Wankstabilisierung ohneKompensation
Bild 7 Aufbau des Kompensationsmoduls und Einsparungdurch die Kompensation
ist. Die Außenhülse, die formschlüssig mit derunteren Stabilisatorhälfte verbunden ist, eineEinheit mit der V-förmigen Kulisse. Die Innen-hülse ist drehbar in der Außenhülse gelagert.Wird nun die Kompensationsfeder entspannt,dann wälzt die Rolle an der V-Kulisse ab underzeugt eine Rotativbewegung und eineUmfangkraft, die – mit dem Hebelarm, der sichaus dem Abstand der V-Kulisse zur Mittellinieergibt, multipliziert – ein (Verspann)-Momentim Aktor induziert.
In Bild 7 ist unten das Verspannmoment des Stabi-lisators über dem Drehwinkel aufgetragen (grüneLinie). Die sich darunter ergebende Fläche ist dieEnergie, die der Aktor aufbringen muss. Die aus derKompensationsfeder zur Verfügung gestellte Energieist der rote Teil. Somit muss ein parallel geschalte-ter Elektromotor nur noch die grün dargestellteEnergie aufbringen, was zu einer deutlichen Ver-besserung der Energiebilanz des Aktors führt.
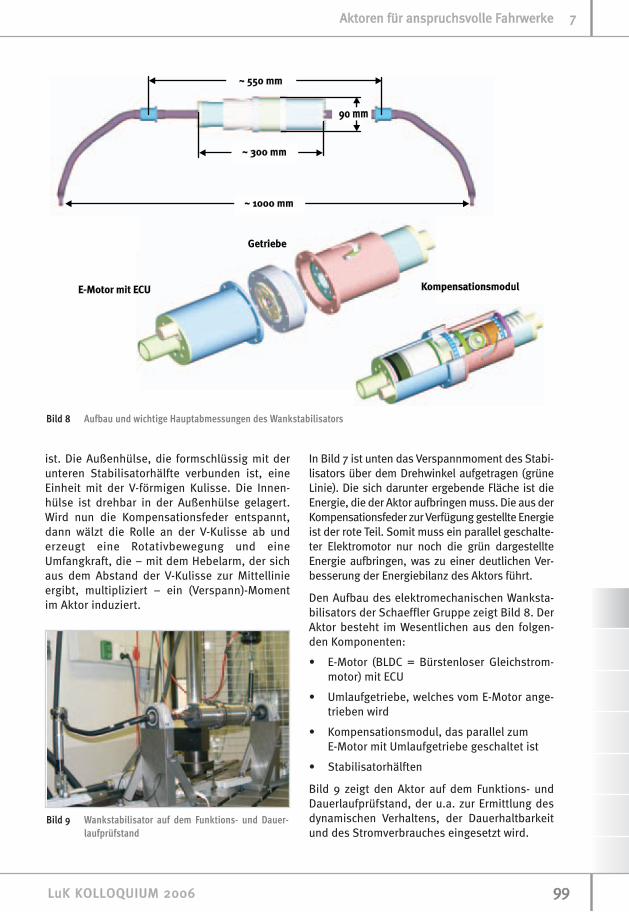
Den Aufbau des elektromechanischen Wanksta-bilisators der Schaeffler Gruppe zeigt Bild 8. DerAktor besteht im Wesentlichen aus den folgen-den Komponenten:
• E-Motor (BLDC = Bürstenloser Gleichstrom-motor) mit ECU
• Umlaufgetriebe, welches vom E-Motor ange-trieben wird
• Kompensationsmodul, das parallel zum E-Motor mit Umlaufgetriebe geschaltet ist
• Stabilisatorhälften
Bild 9 zeigt den Aktor auf dem Funktions- undDauerlaufprüfstand, der u.a. zur Ermittlung desdynamischen Verhaltens, der Dauerhaltbarkeitund des Stromverbrauches eingesetzt wird.
9999LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee 77
Bild 9 Wankstabilisator auf dem Funktions- und Dauer-laufprüfstand
Bild 8 Aufbau und wichtige Hauptabmessungen des Wankstabilisators
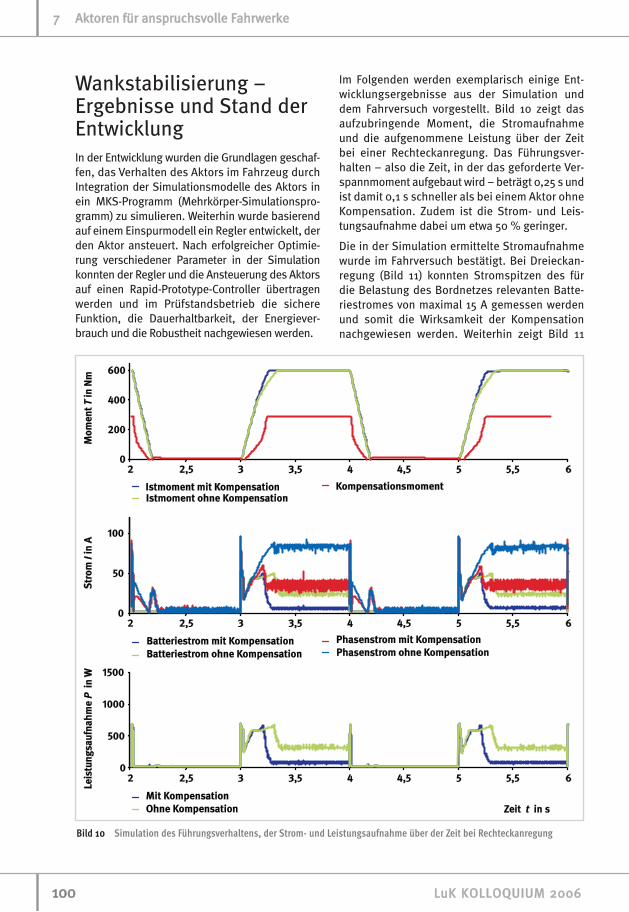
Wankstabilisierung –Ergebnisse und Stand derEntwicklung In der Entwicklung wurden die Grundlagen geschaf-fen, das Verhalten des Aktors im Fahrzeug durchIntegration der Simulationsmodelle des Aktors inein MKS-Programm (Mehrkörper-Simulationspro-gramm) zu simulieren. Weiterhin wurde basierendauf einem Einspurmodell ein Regler entwickelt, derden Aktor ansteuert. Nach erfolgreicher Optimie-rung verschiedener Parameter in der Simulationkonnten der Regler und die Ansteuerung des Aktorsauf einen Rapid-Prototype-Controller übertragenwerden und im Prüfstandsbetrieb die sichereFunktion, die Dauerhaltbarkeit, der Energiever-brauch und die Robustheit nachgewiesen werden.
Im Folgenden werden exemplarisch einige Ent-wicklungsergebnisse aus der Simulation unddem Fahrversuch vorgestellt. Bild 10 zeigt dasaufzubringende Moment, die Stromaufnahmeund die aufgenommene Leistung über der Zeitbei einer Rechteckanregung. Das Führungsver-halten – also die Zeit, in der das geforderte Ver-spannmoment aufgebaut wird – beträgt 0,25 s undist damit 0,1 s schneller als bei einem Aktor ohneKompensation. Zudem ist die Strom- und Leis-tungsaufnahme dabei um etwa 50 % geringer.
Die in der Simulation ermittelte Stromaufnahmewurde im Fahrversuch bestätigt. Bei Dreieckan-regung (Bild 11) konnten Stromspitzen des fürdie Belastung des Bordnetzes relevanten Batte-riestromes von maximal 15 A gemessen werdenund somit die Wirksamkeit der Kompensationnachgewiesen werden. Weiterhin zeigt Bild 11
110000 LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
77 AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee
Bild 10 Simulation des Führungsverhaltens, der Strom- und Leistungsaufnahme über der Zeit bei Rechteckanregung
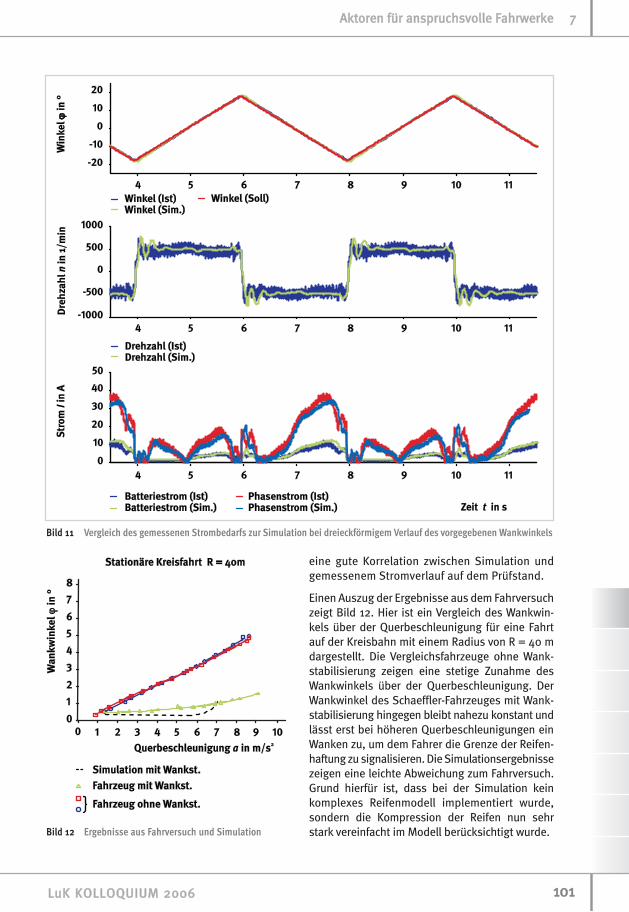
eine gute Korrelation zwischen Simulation undgemessenem Stromverlauf auf dem Prüfstand.
Einen Auszug der Ergebnisse aus dem Fahrversuchzeigt Bild 12. Hier ist ein Vergleich des Wankwin-kels über der Querbeschleunigung für eine Fahrtauf der Kreisbahn mit einem Radius von R = 40 mdargestellt. Die Vergleichsfahrzeuge ohne Wank-stabilisierung zeigen eine stetige Zunahme desWankwinkels über der Querbeschleunigung. DerWankwinkel des Schaeffler-Fahrzeuges mit Wank-stabilisierung hingegen bleibt nahezu konstant undlässt erst bei höheren Querbeschleunigungen einWanken zu, um dem Fahrer die Grenze der Reifen-haftung zu signalisieren. Die Simulationsergebnissezeigen eine leichte Abweichung zum Fahrversuch.Grund hierfür ist, dass bei der Simulation keinkomplexes Reifenmodell implementiert wurde,sondern die Kompression der Reifen nun sehrstark vereinfacht im Modell berücksichtigt wurde.
110011LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee 77
Bild 11 Vergleich des gemessenen Strombedarfs zur Simulation bei dreieckförmigem Verlauf des vorgegebenen Wankwinkels
Bild 12 Ergebnisse aus Fahrversuch und Simulation
Nachdem die Fahrzeugstests positiv verlaufensind, wird der Wankstabilisator konstruktiv über-arbeitet. Ziel ist es hierbei, die Massenträghei-ten zu verringern, den erforderlichen Bauraumzu reduzieren und Kostenoptimierungen in dieKonstruktion einfließen zu lassen.
ElektromechanischerLinearaktor Immer wenn es darum geht, lineare oder rotati-ve Stellbewegungen ohne Hydraulik zu erzeu-gen, werden aus den genannten Gründen in
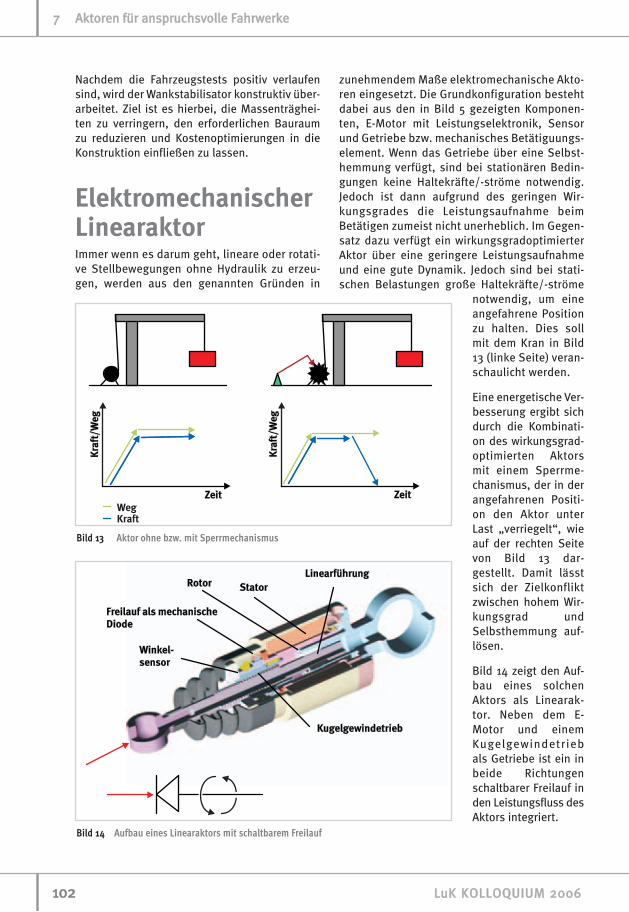
zunehmendem Maße elektromechanische Akto-ren eingesetzt. Die Grundkonfiguration bestehtdabei aus den in Bild 5 gezeigten Komponen-ten, E-Motor mit Leistungselektronik, Sensorund Getriebe bzw. mechanisches Betätiguungs-element. Wenn das Getriebe über eine Selbst-hemmung verfügt, sind bei stationären Bedin-gungen keine Haltekräfte/-ströme notwendig.Jedoch ist dann aufgrund des geringen Wir-kungsgrades die Leistungsaufnahme beimBetätigen zumeist nicht unerheblich. Im Gegen-satz dazu verfügt ein wirkungsgradoptimierterAktor über eine geringere Leistungsaufnahmeund eine gute Dynamik. Jedoch sind bei stati-schen Belastungen große Haltekräfte/-ströme
notwendig, um eineangefahrene Positionzu halten. Dies sollmit dem Kran in Bild13 (linke Seite) veran-schaulicht werden.
Eine energetische Ver-besserung ergibt sichdurch die Kombinati-on des wirkungsgrad-optimierten Aktorsmit einem Sperrme-chanismus, der in derangefahrenen Positi-on den Aktor unterLast „verriegelt“, wieauf der rechten Seitevon Bild 13 dar-gestellt. Damit lässtsich der Zielkonfliktzwischen hohem Wir-kungsgrad undSelbsthemmung auf-lösen.
Bild 14 zeigt den Auf-bau eines solchenAktors als Linearak-tor. Neben dem E-Motor und einemKugelgewindetriebals Getriebe ist ein inbeide Richtungenschaltbarer Freilauf inden Leistungsfluss desAktors integriert.
110022 LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
77 AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee
Bild 13 Aktor ohne bzw. mit Sperrmechanismus
Bild 14 Aufbau eines Linearaktors mit schaltbarem Freilauf

Zur Verdeutlichung der Funktion des Aktors istdie Analogie mit einer elektrischen Diode hilf-reich, wobei der Vergleich nur als Gedankenstüt-ze dienen darf, weil er streng genommen nichtganz korrekt ist. Vereinfacht kann man sagen,alle Energie, die von innen heraus – also vom E-Motor induziert – in den Aktor eingeleitet wird,gelangt nach „draußen“ und steht zur Betätigungzur Verfügung. Wirken jedoch äußere Kräfte aufden Aktor ein (symbolisch durch den roten Pfeil
dargestellt), so wirdder Aktor mechanischdurch den schaltbarenFreilauf verriegelt. DerMotor ist entlastetetund somit vor hoherStromaufnahme ge-schützt.
Trennt man gedanklichden E-Motor und dasGe-häuse aus Bild 14, dannverbleiben die mecha-nischen Komponen-ten, die BIld 15 zeigt.
Folgt man dem Leis-tungsfluss im Aktor,ergibt sich folgenderVerlauf:
E-Motor bestromt → Rotor dreht Schaltkäfig →Rollen werden freigeschaltet → Mutter dreht →Spindel wird linear bewegt
Die Funktion des schaltbaren Freilaufes ist inBild 16 im Detail dargestellt. Der Elektromotor istmit dem Schaltkäfig verbunden, die Lastseite mitdem Innenring und der Außenring ist gehäuse-fest. Auf der linken Seite ist der Freilauf imgesperrten Zustand dargestellt. Ein angreifendes
110033LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee 77
Bild 15 Darstellung des bidirektionalen Freilaufes
Bild 16 Funktionsweise des schaltbaren Freilaufes
Lastmoment am In-nenring bzw. an denInnenrampen führt zurKlemmung der Rollengegenüber dem ge-häusefesten Außen-ring. Die Sperrungerfolgt dabei in beideRichtungen. Auf derrechten Seite von Bild16 wird der Schaltkä-fig vom Motor ange-trieben, der Freilaufist offen. Die Rollenwerden durch denKäfig freigeschaltet.Der Schaltkäfig greiftnach dem Freischaltender Rollen mit seinenZähnen in die Nutendes Innenringes einund verdreht die nach-geschaltete Mutter des Kugelgewindetriebes,was zu einer Stellbewegung der Spindel führt.
Anforderungen undAnwendungsmöglichkeiten Der Aktor kann z.B. zur Sturzverstellung, Vor-spurverstellung und Niveauregulierung einge-setzt werden. Bei diesen Systemen muss diePosition unter Last gehalten bzw. verriegelt wer-den. Eine elektrische Verriegelung ist energe-tisch und aus Kostengründen nicht vorteilhaft.Wichtige technische Anforderungen sind in derfolgenden Tabelle zusammengefasst.
Die genannten Anforderungen beziehen sich aufFahrzeuge der oberen Mittelklasse.
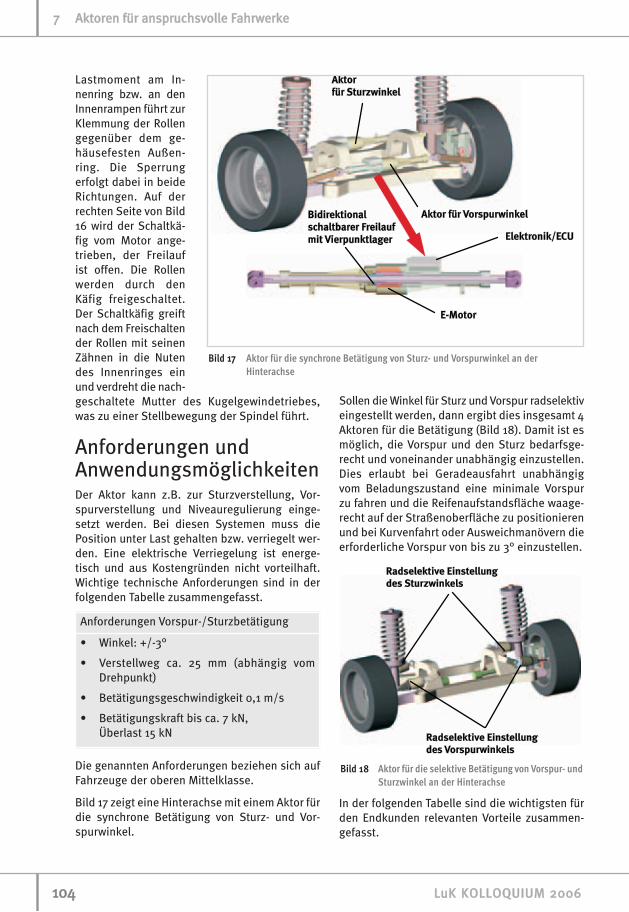
Bild 17 zeigt eine Hinterachse mit einem Aktor fürdie synchrone Betätigung von Sturz- und Vor-spurwinkel.
Sollen die Winkel für Sturz und Vorspur radselektiveingestellt werden, dann ergibt dies insgesamt 4Aktoren für die Betätigung (Bild 18). Damit ist esmöglich, die Vorspur und den Sturz bedarfsge-recht und voneinander unabhängig einzustellen.Dies erlaubt bei Geradeausfahrt unabhängigvom Beladungszustand eine minimale Vorspurzu fahren und die Reifenaufstandsfläche waage-recht auf der Straßenoberfläche zu positionierenund bei Kurvenfahrt oder Ausweichmanövern dieerforderliche Vorspur von bis zu 3° einzustellen.
In der folgenden Tabelle sind die wichtigsten fürden Endkunden relevanten Vorteile zusammen-gefasst.
110044 LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
77 AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee
Bild 17 Aktor für die synchrone Betätigung von Sturz- und Vorspurwinkel an derHinterachse
Bild 18 Aktor für die selektive Betätigung von Vorspur- undSturzwinkel an der Hinterachse
Anforderungen Vorspur-/Sturzbetätigung
• Winkel: +/-3°
• Verstellweg ca. 25 mm (abhängig vomDrehpunkt)
• Betätigungsgeschwindigkeit 0,1 m/s
• Betätigungskraft bis ca. 7 kN, Überlast 15 kN
Vorteile Vorspurbetätigung Vorteile Sturzbetätigung
• geringerer Reifenverschleiß
• Sicherheits-/Stabilitätsgewinn, insbesondere beim Bremsen in Kurven undbei µ-Split-Bedingungen
• optimierte Stabilität bei Anhängerbetrieb
• optimiertes Ansprechverhalten aufLenkbefehle
• Reduzierung des Wendekreises
• höhere Querbeschleunigung
• verringerter Reifenverschleiß
• verringerter Bremsweg
• höhere Reifentragfähigkeit
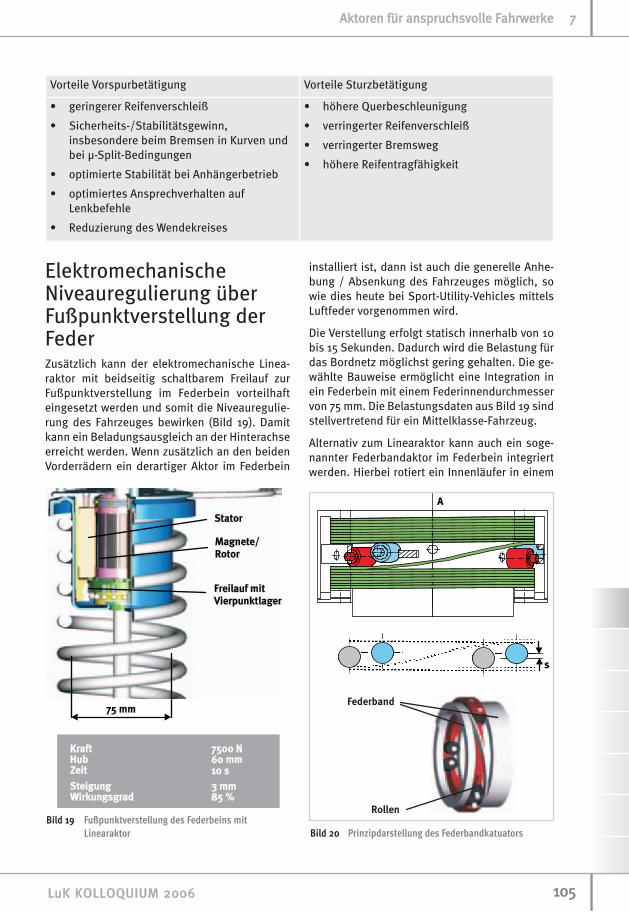
ElektromechanischeNiveauregulierung überFußpunktverstellung derFeder Zusätzlich kann der elektromechanische Linea-raktor mit beidseitig schaltbarem Freilauf zurFußpunktverstellung im Federbein vorteilhafteingesetzt werden und somit die Niveauregulie-rung des Fahrzeuges bewirken (Bild 19). Damitkann ein Beladungsausgleich an der Hinterachseerreicht werden. Wenn zusätzlich an den beidenVorderrädern ein derartiger Aktor im Federbein
installiert ist, dann ist auch die generelle Anhe-bung / Absenkung des Fahrzeuges möglich, sowie dies heute bei Sport-Utility-Vehicles mittelsLuftfeder vorgenommen wird.
Die Verstellung erfolgt statisch innerhalb von 10bis 15 Sekunden. Dadurch wird die Belastung fürdas Bordnetz möglichst gering gehalten. Die ge-wählte Bauweise ermöglicht eine Integration inein Federbein mit einem Federinnendurchmesservon 75 mm. Die Belastungsdaten aus Bild 19 sindstellvertretend für ein Mittelklasse-Fahrzeug.
Alternativ zum Linearaktor kann auch ein soge-nannter Federbandaktor im Federbein integriertwerden. Hierbei rotiert ein Innenläufer in einem
110055LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee 77
Bild 19 Fußpunktverstellung des Federbeins mitLinearaktor Bild 20 Prinzipdarstellung des Federbandkatuators
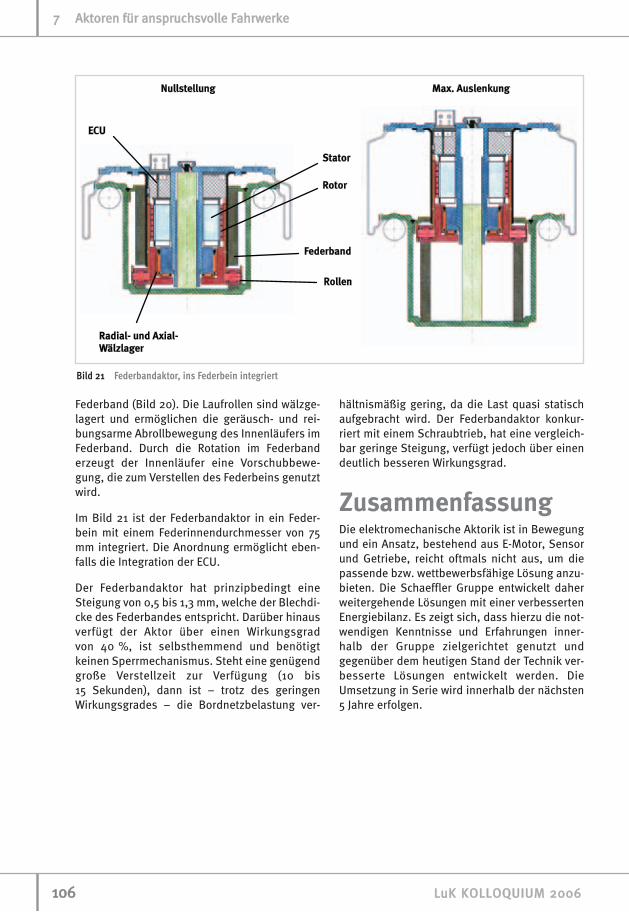
Federband (Bild 20). Die Laufrollen sind wälzge-lagert und ermöglichen die geräusch- und rei-bungsarme Abrollbewegung des Innenläufers imFederband. Durch die Rotation im Federbanderzeugt der Innenläufer eine Vorschubbewe-gung, die zum Verstellen des Federbeins genutztwird.
Im Bild 21 ist der Federbandaktor in ein Feder-bein mit einem Federinnendurchmesser von 75mm integriert. Die Anordnung ermöglicht eben-falls die Integration der ECU.
Der Federbandaktor hat prinzipbedingt eineSteigung von 0,5 bis 1,3 mm, welche der Blechdi-cke des Federbandes entspricht. Darüber hinausverfügt der Aktor über einen Wirkungsgrad von 40 %, ist selbsthemmend und benötigtkeinen Sperrmechanismus. Steht eine genügendgroße Verstellzeit zur Verfügung (10 bis15 Sekunden), dann ist – trotz des geringen Wirkungsgrades – die Bordnetzbelastung ver-
hältnismäßig gering, da die Last quasi statischaufgebracht wird. Der Federbandaktor konkur-riert mit einem Schraubtrieb, hat eine vergleich-bar geringe Steigung, verfügt jedoch über einendeutlich besseren Wirkungsgrad.
ZusammenfassungDie elektromechanische Aktorik ist in Bewegungund ein Ansatz, bestehend aus E-Motor, Sensorund Getriebe, reicht oftmals nicht aus, um diepassende bzw. wettbewerbsfähige Lösung anzu-bieten. Die Schaeffler Gruppe entwickelt daherweitergehende Lösungen mit einer verbessertenEnergiebilanz. Es zeigt sich, dass hierzu die not-wendigen Kenntnisse und Erfahrungen inner-halb der Gruppe zielgerichtet genutzt undgegenüber dem heutigen Stand der Technik ver-besserte Lösungen entwickelt werden. DieUmsetzung in Serie wird innerhalb der nächsten5 Jahre erfolgen.
110066 LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
77 AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee
Bild 21 Federbandaktor, ins Federbein integriert

110077LLuuKK KKOOLLLLOOQQUUIIUUMM 22000066
AAkkttoorreenn ffüürr aannsspprruucchhssvvoollllee FFaahhrrwweerrkkee 77





























