Embed Size (px)
Citation preview

Problemas resueltos deAMPLIACIÓN DE MATEMÁTICAS
Ingeniería Industrial.Departamento de Matemática Aplicada II. Universidad de Sevilla.
Problemas resueltos de planos de fases.
1 P 4.9Esbozar el plano de fases del sistema
x0 = x2 + y2 − 1y0 = x2 − y2
Solución:
• Cálculo de puntos críticos:Tenemos que hallar los puntos (x, y) que satisfacen las dos ecuaciones siguientes:
f(x, y) = x2 + y2 − 1 = 0g(x, y) = x2 − y2 = 0.
Resolviendo este sistema se obtienen los puntos críticos A =µ1√2,1√2
¶, B =
µ1√2,− 1√
2
¶, C =
µ− 1√
2,1√2
¶y D =
µ− 1√
2,− 1√
2
¶.
• Naturaleza y estabilidad de los puntos críticos:La matriz jacobiana es J(x, y) =
∙fx fygx gy
¸=
∙2x 2y2x −2y
¸. Es la que nos proporcionará la matriz del sistema
linealizado en cada punto crítico.
A =
µ1√2,1√2
¶. En este punto el sistema linealizado trasladado al origen tendrá matriz A1 = J
µ1√2,1√2
¶=∙ √
2√2√
2 −√2
¸. Nótese que, alternativamente, puede obtenerse directamente el mismo resultado si hacemos el
cambio ex = x− 1√2, ey = y − 1√
2para llevar el punto A al (0, 0) y aplicar la teoría:
Con este cambio el sistema se transforma en
ex0 = ex2 + 2√2ex+ ey2 + 2√
2ey
ey0 = ex2 + 2√2ex− ey2 − 2√
2ey.
El sistema linealizado correspondiente es, en efecto,
ex0 =√2ex+√2eyey0 =√2ex−√2ey
con matriz A1 =∙a bc d
¸=
∙ √2√2√
2 −√2
¸y cuyos autovalores son λ1 = 2 > 0 y λ2 = −2 < 0. Como ambos
son reales de distinto signo, el punto A =µ1√2,1√2
¶corresponde a un punto de silla y, por tanto, es inestable.
Los correspondientes autovectores son v1 = (1,√2− 1)t y v2 = (1,−1−
√2)t, respectivamente; y las rectas que
pasan por el punto A y tienen como direcciones las dadas por los autovectores son
r ≡ ey = (√2− 1)exs ≡ ey = (−1−√2)ex o, equivalentemente,
r ≡ y − 1√2= (√2− 1)(x− 1√
2)
s ≡ y − 1√2= (−1−
√2)(x− 1√
2).
1

El correspondiente sistema no linealizado se comportará de forma análoga.
B =
µ1√2,− 1√
2
¶Hacemos el cambio ex = x− 1√
2, ey = y +
1√2para llevar el punto B al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = ex2 + 2√2ex+ ey2 − 2√
2ey
ey0 = ex2 + 2√2ex− ey2 + 2√
2ey.
El sistema linealizado correspondiente es
ex0 =√2ex−√2eyey0 =√2ex+√2ey
con matriz A2 =∙a bc d
¸=
∙ √2 −
√2√
2√2
¸y cuyos autovalores son λ1 =
√2 +√2i y λ2 =
√2 −√2i. Como
ambos son complejos conjugados no imaginarios puros, el punto B =
µ1√2,− 1√
2
¶corresponde a un foco o punto
espiral. Como Re(λi) =√2 > 0 (i = 1, 2), el foco es inestable y como c =
√2 > 0, el sentido es antihorario.
El correspondiente sistema no linealizado se comportará de forma análoga.
C =
µ− 1√
2,1√2
¶Hacemos el cambio ex = x+
1√2, ey = y − 1√
2para llevar el punto C al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = ex2 − 2√2ex+ ey2 + 2√
2ey
ey0 = ex2 − 2√2ex− ey2 − 2√
2ey.
El sistema linealizado correspondiente es
ex0 = −√2ex+√2eyey0 = −√2ex−√2ey
con matriz A3 =∙a bc d
¸=
∙−√2√2
−√2 −
√2
¸y cuyos autovalores son λ1 = −
√2 +√2i y λ2 = −
√2 −√2i.
Como ambos son complejos conjugados no imaginarios puros, el punto C =µ− 1√
2,1√2
¶corresponde a un foco
o punto espiral. Como Re(λi) = −√2 < 0 (i = 1, 2), el foco es asintóticamente estable y como c = −
√2 < 0, el
sentido es horario.
El correspondiente sistema no linealizado se comportará de forma análoga.
D =
µ− 1√
2,− 1√
2
¶Hacemos el cambio ex = x+
1√2, ey = y +
1√2para llevar el punto D al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = ex2 − 2√2ex+ ey2 − 2√
2ey
ey0 = ex2 − 2√2ex− ey2 + 2√
2ey.
El sistema linealizado correspondiente es
ex0 = −√2ex−√2eyey0 = −√2ex+√2ey
2

con matriz A1 =
∙a bc d
¸=
∙−√2 −
√2
−√2√2
¸y cuyos autovalores son λ1 = 2 > 0 y λ2 = −2 < 0. Como
ambos son reales de distinto signo, el punto D =
µ− 1√
2,− 1√
2
¶corresponde a un punto de silla y, por tanto,
es inestable. Los correspondientes autovectores son v1 = (1,−√2− 1)t y v2 = (1,−1+
√2)t, respectivamente; y
las rectas que pasan por el punto D y tienen como direcciones las dadas por los autovectores son
r ≡ ey = (−√2− 1)exs ≡ ey = (−1 +√2)ex o, equivalentemente,
r ≡ y +1√2= (−
√2− 1)(x+ 1√
2)
s ≡ y +1√2= (−1 +
√2)(x+
1√2).
El correspondiente sistema no linealizado se comportará de forma análoga.
• Campo de direcciones:Debemos estudiar el signo de x0 y de y0 para conocer el crecimiento o decrecimiento de las componentes x e y.
Notemos que x0 = 0 si y solo si x2 + y2 − 1 = 0 que corresponde a la ecuación de una circunferencia centrada enel (0, 0) y de radio 1; y que y0 = 0 si y solo si x2 − y2 = 0 que corresponde al par de rectas y = x e y = −x. Elestudio del signo de x0 y de y0 y, por tanto, del campo de direcciones queda recogido en la figura siguiente
Figura del campo de direcciones.
• Cálculo de trayectorias rectas:Si una recta del tipo y = ax+ b contiene trayectorias, debe verificarse que, en los puntos de dicha recta
a =dy
dx=
dy/dt
dx/dt=
x2 − y2
x2 + y2 − 1 para todo (x, y) tal que y = ax+ b.
Esto equivale a decir que
x2(a+ a3 − 1 + a) + x(2a2b+ 2ab) + (ab2 − a+ b2) = 0 para todo x
Para ello a y b deben verificar el sistema
⎧⎨⎩ a+ a3 − 1 + a2 = 02a2b+ 2ab = 0ab2 − a+ b2 = 0
que es incompatible. Por tanto, no existen
trayectorias rectas del tipo y = ax+ b.
Sin embargo, aquí no quedan recogidas las trayectorias verticales (aquéllas con pendiente infinita). Dichas rectas
son del tipo x = m y debe verificarse que, en los puntos de dichas rectas se tenga quedx
dt= 0.
dx
dt= 0 para todo (m, y)⇒ x2 + y2 − 1 = 0 para todo (m,y)⇒ m2 + y2 − 1 = 0 para todo y
llegando de nuevo a una contradicción. Por tanto, tampoco existen trayectorias verticales.
3

4

2 P 4.10Esbozar el plano de fases del sistema
x0 = x− y
y0 = 4x2 + 2y2 − 6
Solución:
• Cálculo de puntos críticos:Tenemos que hallar los puntos (x, y) que satisfacen las dos ecuaciones siguientes:
x− y = 0
4x2 + 2y2 − 6 = 0.
Resolviendo este sistema se obtienen los puntos críticos A = (1, 1) y B = (−1,−1).
• Naturaleza y estabilidad de los puntos críticos:A = (1,1)
Hacemos el cambio ex = x− 1, ey = y − 1 para llevar el punto A al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = ex− eyey0 = 4ex2 + 8ex+ 2ey2 + 4ey.El sistema linealizado correspondiente es
ex0 = ex− eyey0 = 8ex+ 4eycon matriz A1 =
∙a bc d
¸=
∙1 −18 4
¸y cuyos autovalores son λ1 =
5 +√23i
2y λ2 =
5−√23i
2. Como ambos
son complejos conjugados no imaginarios puros, el punto A = (1, 1) corresponde a un foco o punto espiral. ComoRe(λi) = 5/2 > 0 (i = 1, 2), el foco es inestable y como c = 8 > 0, el sentido es antihorario.
El correspondiente sistema no linealizado se comportará de forma análoga.
B = (−1,−1)Hacemos el cambio ex = x+ 1, ey = y + 1 para llevar el punto B al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en½ ex0 = ex− ey,ey0 = 4ex2 − 8ex+ 2ey2 − 4ey. . El sistema linealizado correspondi-
ente es½ ex0 = ex− ey,ey0 = −8ex− 4ey. , con matriz A2 =
∙a bc d
¸=
∙1 −1−8 −4
¸y cuyos autovalores son λ1 =
−3 +√57
2
y λ2 =−3−
√57
2. Como los autovalores son reales y de distinto signo, B = (−1,−1) corresponde a un punto
de silla y, por tanto, es inestable. Los correspondientes autovectores son v1 = (1,−1.25)t y v2 = (1, 6.25)t,respectivamente; y las rectas que pasan por el punto B y tienen como direcciones las dadas por los autovectoresson
r ≡ ey = −1.25exs ≡ ey = 6.25ex o, equivalentemente,
r ≡ y + 1 = −1.25(x+ 1)s ≡ y + 1 = 6.25(x+ 1).
En el sistema no linealizado el comportamiento es análogo.
• Campo de direcciones:Debemos estudiar el signo de x0 y de y0 para conocer el crecimiento o decrecimiento de las componentes x e y.
Notemos que x0 = 0 si y solo si x − y = 0 que corresponde a la ecuación de una recta en el plano XY y que
y0 = 0 si y solo si 4x2 + 2y2 − 6 = 0 o, equivalentemente,x2
3/2+
y2
3= 1 que corresponde a la ecuación de la
elipse centrada en el (0, 0) y de semiejesp3/2 y
√3. El estudio del signo de x0 y de y0 y, por tanto, del campo
de direcciones queda recogido en la figura siguiente
5
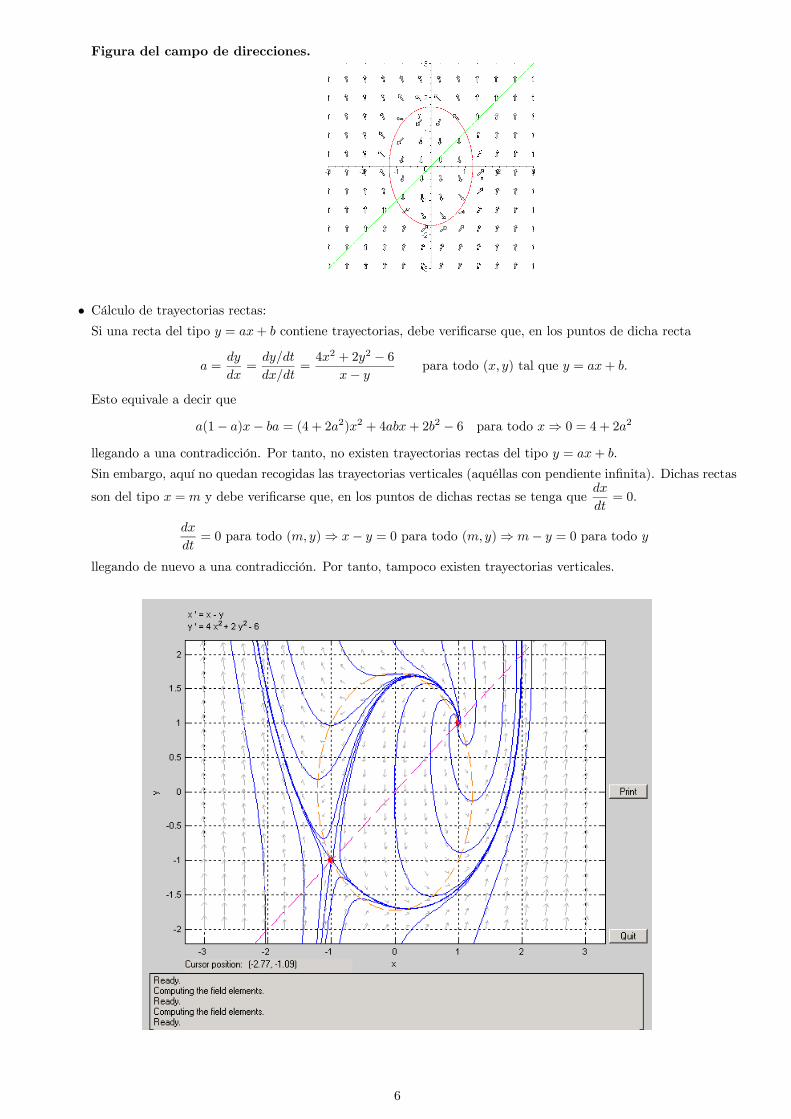
Figura del campo de direcciones.
• Cálculo de trayectorias rectas:Si una recta del tipo y = ax+ b contiene trayectorias, debe verificarse que, en los puntos de dicha recta
a =dy
dx=
dy/dt
dx/dt=4x2 + 2y2 − 6
x− ypara todo (x, y) tal que y = ax+ b.
Esto equivale a decir que
a(1− a)x− ba = (4 + 2a2)x2 + 4abx+ 2b2 − 6 para todo x⇒ 0 = 4 + 2a2
llegando a una contradicción. Por tanto, no existen trayectorias rectas del tipo y = ax+ b.
Sin embargo, aquí no quedan recogidas las trayectorias verticales (aquéllas con pendiente infinita). Dichas rectas
son del tipo x = m y debe verificarse que, en los puntos de dichas rectas se tenga quedx
dt= 0.
dx
dt= 0 para todo (m, y)⇒ x− y = 0 para todo (m,y)⇒ m− y = 0 para todo y
llegando de nuevo a una contradicción. Por tanto, tampoco existen trayectorias verticales.
6

3 P 4.12Esbozar el plano de fases del sistema
x0 = x2 + 2xy + y2 − 1y0 = x2 − 2xy + y2 − 1
Solución:
• Cálculo de puntos críticos:Tenemos que hallar los puntos (x, y) que satisfacen las dos ecuaciones siguientes:
x2 + 2xy + y2 − 1 = 0
x2 − 2xy + y2 − 1 = 0.
Resolviendo este sistema se obtienen los puntos críticos A = (1, 0) , B = (0, 1) , C = (−1, 0) y D = (0,−1).
• Naturaleza y estabilidad de los puntos críticos:A =(1, 0)
Hacemos el cambio ex = x− 1, ey = y para llevar el punto A al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = ex2 + 2ex+ 2exey + 2ey + 2ey2ey0 = ex2 + 2ex− 2exey − 2ey + ey2.El sistema linealizado correspondiente es
ex0 = 2ex+ 2eyey0 = 2ex− 2eycon matriz A1 =
∙a bc d
¸=
∙2 22 −2
¸y cuyos autovalores son λ1 = 2
√2 > 0 y λ2 = −2
√2 < 0. Como ambos
son reales de distinto signo, el punto A = (1, 0) corresponde a un punto de silla y, por tanto, es inestable. Loscorrespondientes autovectores son v1 = (1,
√2−1)t y v2 = (1,−1−
√2)t, respectivamente; y las rectas que pasan
por el punto A y tienen como direcciones las dadas por los autovectores son
r ≡ ey = (√2− 1)exs ≡ ey = (−1−√2)ex o, equivalentemente,
r ≡ y = (√2− 1)(x− 1)
s ≡ y = (−1−√2)(x− 1).
El correspondiente sistema no linealizado se comportará de forma análoga.
B =(0, 1)
Hacemos el cambio ex = x, ey = y − 1 para llevar el punto B al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = ex2 + 2exey + 2ex+ ey2 + 2eyey0 = ex2 − 2exey − 2ex+ ey2 + 2ey.El sistema linealizado correspondiente es
ex0 = 2ex+ 2eyey0 = −2ex+ 2eycon matriz A2 =
∙a bc d
¸=
∙2 2−2 2
¸y cuyos autovalores son λ1 = 2 + 2i y λ2 = 2 − 2i. Como ambos son
complejos conjugados no imaginarios puros, el punto B = (0, 1) corresponde a un foco o punto espiral. ComoRe(λi) = 2 > 0 (i = 1, 2), el foco es inestable y como c = −2 < 0, el sentido es horario.El correspondiente sistema no linealizado se comportará de forma análoga.
C =(−1, 0)Hacemos el cambio ex = x+ 1, ey = y para llevar el punto C al (0, 0) y aplicar la teoría.
7

Con este cambio el sistema se transforma en
ex0 = ex2 − 2ex+ 2exey + ey2 − 2eyey0 = ex2 − 2ex− 2exey + ey2 + 2ey.El sistema linealizado correspondiente es
ex0 = −2ex− 2ey ey0 = −2ex+ 2eycon matriz A3 =
∙a bc d
¸=
∙−2 −2−2 2
¸y cuyos autovalores son λ1 = 2
√2 y λ2 = −2
√2. Como ambos son
reales de distinto signo, el punto C = (−1, 0) corresponde a un punto de silla y, por tanto, es inestable. Loscorrespondientes autovectores son v1 = (1,−
√2 − 1)t y v2 = (1,−1 +
√2)t, respectivamente; y las rectas que
pasan por el punto C y tienen como direcciones las dadas por los autovectores son
r ≡ ey = (−√2− 1)exs ≡ ey = (−1 +√2)ex o, equivalentemente,
r ≡ y = (−√2− 1)(x+ 1)
s ≡ y = (−1 +√2)(x+ 1).
El correspondiente sistema no linealizado se comportará de forma análoga.
D =(0,−1)Hacemos el cambio ex = x, ey = y + 1 para llevar el punto D al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = ex2 + 2exey − 2ex+ ey2 − 2eyey0 = ex2 − ey + 2ex+ ey2 − 2ey.El sistema linealizado correspondiente es
ex0 = −2ex− 2eyey0 = 2ex− 2eycon matriz A1 =
∙a bc d
¸=
∙−2 −22 −2
¸y cuyos autovalores son λ1 = −2 + 2i y λ2 = −2− 2i. Como ambos
son complejos conjugados no imaginarios puros, el punto D = (0,−1) corresponde a un foco o punto espiral.Como Re(λi) = −2 < 0 (i = 1, 2), el foco es asintóticamente estable y como c = 2 > 0, el sentido es antihorario.El correspondiente sistema no linealizado se comportará de forma análoga.
• Campo de direcciones:Debemos estudiar el signo de x0 y de y0 para conocer el crecimiento o decrecimiento de las componentes x e y.
Notemos que x0 = 0 si y solo si x2+2xy+y2−1 = (x+y+1)(x+y−1) = 0 que corresponde a la ecuación del parde rectas x+y+1 = 0 y x+y−1 = 0; por otro lado y0 = 0 si y solo si x2−2xy+y2−1 = (x−y+1)(x−y−1) = 0que corresponde al par de rectas x− y + 1 = 0 y x− y − 1 = 0. El estudio del signo de x0 y de y0 y, por tanto,del campo de direcciones queda recogido en el diagrama siguiente:
Diagrama de campo de direcciones.
8

• Cálculo de trayectorias rectas:Si una recta del tipo y = ax+ b contiene trayectorias, debe verificarse que, en los puntos de dicha recta
a =dy
dx=
dy/dt
dx/dt=(x− y + 1)(x− y − 1)(x+ y + 1)(x+ y − 1) para todo (x, y) tal que y = ax+ b.
Esto equivale a decir que
x2a(1 + a)2 + xa(1 + a)2b+ (b2 − 1)a = x2(1− a)2 − x(1− a)2b+ (b2 − 1) para todo x
Para ello a y b deben verificar el sistema
⎧⎨⎩ a2 + a3 − 1 + 3a = 02b(a2 + 1) = 0
(a− 1)(b2 − 1) = 0que es incompatible. Por tanto, no existen
trayectorias rectas del tipo y = ax+ b.
Sin embargo, aquí no quedan recogidas las trayectorias verticales (aquéllas con pendiente infinita). Dichas rectas
son del tipo x = m y debe verificarse que, en los puntos de dichas rectas se tenga quedx
dt= 0.
dx
dt= 0 para todo (m, y)⇒ (m+ y + 1)(m+ y − 1) = 0 para todo y ⇒ (m+ y)2 − 1 = 0 para todo y
llegando de nuevo a una contradicción. Por tanto, tampoco existen trayectorias verticales.
9

4 P 4.13Esbozar el plano de fases del sistema
x0 = x(3− x− y)
y0 = y(x− 1)
Solución:
• Cálculo de puntos críticos:Tenemos que hallar los puntos (x, y) que satisfacen las dos ecuaciones siguientes:
x(3− x− y) = 0
y(x− 1) = 0.
Resolviendo este sistema se obtienen los puntos críticos A = (0, 0), B = (3, 0) y C = (1, 2).
• Naturaleza y estabilidad de los puntos críticos:A = (0,0)
El sistema linealizado correspondiente es
x0 = 3x
y0 = −y
con matriz A1 =
∙a bc d
¸=
∙3 00 −1
¸y cuyos autovalores son λ1 = 3 > 0 y λ2 = −1 < 0. Como los
autovalores son reales y de distinto signo, A = (0, 0) corresponde a un punto de silla y, por tanto, es inestable.Los correspondientes autovectores son v1 = (1, 0)
t y v2 = (0, 1)t, respectivamente; y las rectas que pasan por el
punto A y tienen como direcciones las dadas por los autovectores son
r ≡ y = 0s ≡ x = 0
El correspondiente sistema no linealizado se comportará de forma análoga.
B = (3,0)
Hacemos el cambio ex = x− 3, ey = y para llevar el punto B al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = −ex2 − exey − 3ex− 3eyey0 = exey + 2eyEl sistema linealizado correspondiente es
ex0 = −3ex− 3eyey0 = −2eycon matriz A2 =
∙a bc d
¸=
∙−3 −30 2
¸y cuyos autovalores son λ1 = 2 y λ2 = −3. Como los autovalores
son reales y de distinto signo, B = (3, 0) corresponde a un punto de silla y, por tanto, es inestable. Loscorrespondientes autovectores son v1 = (3,−5)t y v2 = (1, 0)t, respectivamente; y las rectas que pasan por elpunto B y tienen como direcciones las dadas por los autovectores son
r ≡ 3ey = −5exs ≡ ey = 0 o, equivalentemente,
r ≡ 5x+ 3y − 15 = 0s ≡ y = 0
En el sistema no linealizado el comportamiento es análogo.
C = (1,2)
Hacemos el cambio ex = x− 1, ey = y − 2 para llevar el punto C al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = (ex+ 1)(−ex− ey)ey0 = (ey + 2)ex.10

El sistema linealizado correspondiente es ex0 = −ex− eyey0 = 2excon matriz A3 =
∙a bc d
¸=
∙−1 −12 0
¸y cuyos autovalores son λ1 = −
1
2+
√7
2i y λ2 = −
1
2−√7
2i. Como
ambos son complejos conjugados no imaginarios puros, el punto C = (1, 2) corresponde a un foco o punto espiral.
Como Re(λi) = −1
2< 0 (i = 1, 2), el foco es asintóticamente estable y como c = 2 > 0, el sentido es antihorario.
El correspondiente sistema no linealizado se comportará de forma análoga.
• Campo de direcciones:Debemos estudiar el signo de x0 y de y0 para conocer el crecimiento o decrecimiento de las componentes x e y.
Notemos que x0 = 0 si y solo si x(3 − x − y) = 0 que corresponde a la ecuación del par de rectas x = 0 y3 − x − y = 0 y que y0 = 0 si y solo si y(x − 1) = 0 que corresponde a la ecuación del par de rectas y = 0 yx− 1 = 0. El estudio del signo de x0 y de y0 y, por tanto, del campo de direcciones queda recogido en la figurasiguiente
Figura del campo de direcciones.
• Cálculo de trayectorias rectas:Si una recta del tipo y = ax+ b contiene trayectorias, debe verificarse que, en los puntos de dicha recta
a =dy
dx=
dy/dt
dx/dt=
y(x− 1)x(3− x− y)
para todo (x, y) tal que y = ax+ b.
Esto equivale a decir que
(−.a2 − a)x2 + (3a− ab)x = ax2 + x(−a+ b)− b para todo x⇒
⎧⎨⎩ −a2 − a = a
3a− ab = −a+ bb = 0
Notemos que dichas ecuaciones se satisfacen para a = b = 0. Podemos deducir, por tanto, que la recta y = 0 esuna trayectoria recta.
Sin embargo, aquí no quedan recogidas las trayectorias verticales (aquéllas con pendiente infinita). Dichas rectas
son del tipo x = m y debe verificarse que, en los puntos de dichas rectas se tenga quedx
dt= 0.
dx
dt= 0 para todo (m, y)⇒ x(3− x− y) = 0 para todo (m, y)⇒ m(3−m− y) = 0 para todo y.
Dicha ecuación se satisface para m = 0. Deducimos, por tanto, que la recta x = 0 es una trayectoria rectavertical.
11

12

5 P 4.14Obtener los puntos críticos del sistema
x0 = (x− α)(y − β)
y0 = x+ y + γ
en función de los parámetros α, β, γ ∈ R, indicando su naturaleza. Dibujar el plano de fases para el caso α = 1,β = γ = 0.
Solución:
• Cálculo de puntos críticos:Tenemos que hallar los puntos (x, y) que satisfacen las dos ecuaciones siguientes:
(x− α)(y − β) = 0
x+ y + γ = 0.
Resolviendo este sistema se obtienen los puntos críticos A = (α,−α− γ) y B = (−β − γ, β).
• Naturaleza y estabilidad de los puntos críticos:A = (α,−α− γ)Hacemos el cambio ex = x− α, ey = y + α+ γ para llevar el punto A al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = −(α+ γ + β)ex+ exeyey0 = ex+ eyEl sistema linealizado correspondiente es
ex0 = −(α+ γ + β)exey0 = ex+ eycon matriz A1 =
∙a bc d
¸=
∙−(α+ γ + β) 01 1
¸y cuyos autovalores son λ1 = −(α+γ+β) y λ2 = 1. Notemos
que:
1. Si −(α+ γ + β) 6= 1, los dos autovalores son reales y distintos. Si además se tiene que −(α + γ + β) > 0,entonces son ambos de signo positivo proporcionando un nodo inestable y si −(α + γ + β) < 0, entoncesson de distinto signo proporcionando un punto de silla inestable.
2. Si −(α + γ + β) = 1, tenemos un único autovalor real doble con multiplicidad geométrica igual a uno quenos conduce a un nodo inestable.
B = (−β − γ,β)Hacemos el cambio ex = x+ β + γ, ey = y − β para llevar el punto B al (0, 0) y aplicar la teoría.
Con este cambio el sistema se transforma en
ex0 = −(β + γ + α)ey + exeyey0 = ex+ ey.El sistema linealizado correspondiente es
ex0 = −(β + γ + α)eyey0 = ex+ eycon matriz A3 =
∙a bc d
¸=
∙0 −(β + γ + α)1 1
¸y cuyos autovalores son λ =
1±p1− 4(β + γ + α)
2. Note-
mos que:
1. Si 1 − 4(β + γ + α) < 0, los autovalores son complejos no imaginarios puros proporcionando un puntoespiral. Como la parte real de dichos autovalores es positiva, el comportamiento es inestable y como c = 1,el sentido es antihorario.
2. Si 1− 4(β + γ + α) = 0, tenemos un único autovalor real doble positivo con multiplicidad geométrica iguala uno. La matriz correspondiente no es diagonalizable y estamos trabajando con un nodo inestable.
13

3. Si 1−4(β+γ+α) > 0, los autovalores son reales y distintos de forma que si, además, β+γ+α > 0, los dostienen signo positivo proporcionando un nodo inestable y si β + γ + α < 0, los autovalores tienen distintosigno proporcionando un punto de silla inestable.
• Estudiemos el plano de fases en el caso α = 1, β = 0 = γ. Tal como se ha analizado antes, en este caso el sistemaes
x0 = (x− 1)yy0 = x+ y
y los puntos críticos son A = (1,−1) y B = (0, 0).
Para A = (1,−1), sabemos que es un punto de silla inestable puesto que los autovalores correspondientes sonλ1 = 1 > 0 y λ2 = −1 < 0. Fácilmente, se puede comprobar que los correspondientes autovectores son v1 = (0, 1)ty v2 = (−2, 1)t, respectivamente, y las rectas que pasan por el punto A y tienen como direcciones las dadas porlos autovectores son
r ≡ ex = 0s ≡ ex = −2ey o, equivalentemente,
r ≡ x− 1 = 0s ≡ x− 1 = −2(y + 1)
Para B = (0, 0), sabemos que es un punto espiral inestable con sentido antihorario.
• Campo de direcciones:Debemos estudiar el signo de x0 y de y0 para conocer el crecimiento o decrecimiento de las componentes x e y.
Notemos que x0 = 0 si y solo si (x− 1)y = 0 que corresponde a la ecuación del par de rectas x− 1 = 0 e y = 0.Por otro lado y0 = 0 si y solo si y + x = 0 que corresponde a una recta. El estudio del signo de x0 y de y0 y, portanto, del campo de direcciones queda recogido en el diagrama siguiente
Diagrama del campo de direcciones.
• Cálculo de trayectorias rectas:Si una recta del tipo y = ax+ b contiene trayectorias, debe verificarse que, en los puntos de dicha recta
a =dy
dx=
dy/dt
dx/dt=
x+ y
(x− 1)y para todo (x, y) tal que y = ax+ b.
Esto equivale a decir que
a2x2 + (ab− a2 − 1− a)x− ab− b = 0 para todo x⇒
⎧⎨⎩ −ab− b = 0ab− a2 − 1− a = 0a = 0
14

Este sistema es incompatible, por tanto no existen órbitas rectas del tipo y = ax+ b.
Sin embargo, aquí no quedan recogidas las trayectorias verticales (aquéllas con pendiente infinita). Dichas rectas
son del tipo x = m y debe verificarse que, en los puntos de dichas rectas se tenga quedx
dt= 0.
dx
dt= 0 para todo (m,y)⇒ (x− 1)y = 0 para todo (m,y)⇒ (m− 1)y = 0 para todo y.
Dicha ecuación se satisface para m = 1. Deducimos, por tanto, que la recta x = 1 es una trayectoria rectavertical.
15

6 P 4.19Se considera el sistema no lineal ½
x = x2 + y2 − 4y = y(y − x)
Calcular y analizar los puntos de equilibrio o puntos críticos del sistema, determinando su estabilidad y la config-uración de las trayectorias próximas. Estudiar el campo de direcciones, precisando las líneas de tangente vertical yhorizontal. Calcular, si existen, trayectorias u órbitas rectas. Hacer un esquema del plano de fases.
Solución.
Puntos críticos:Resolveremos el sistema
f(x, y) = x2 + y2 − 4 = 0g(x, y) = y(y − x) = 0
Si y = 0, x2 + y2 − 4 = 0 = x2 − 4 =⇒ x = ±2 y se obtienen P1 = (2, 0) y P2 = (−2, 0).Si y 6= 0 ha de ser y = x, x2 + y2 − 4 = 0 = 2x2 − 4 =⇒ x = y = ±
√2 y se obtienen P3 = (
√2,√2) y
P4 = (−√2,−√2).
Análisis:
La matriz jacobiana del sistema es A(x, y) =∙fx fygx gy
¸=
∙2x 2y−y 2y − x
¸Estudiaremos el comportamiento del sistema linealizado correspondiente a cada punto crítico:
• P1 = (2, 0) : A(2, 0) =∙4 00 −2
¸, cuyos autovalores y autovectores son λ1 = −2, con a1 =
∙01
¸y λ2 = 4,
con a2 =∙10
¸. Se trata entonces de un punto de silla, por lo que es inestable. La configuración de las órbitas
próximas es similar a la familia de hipérbolas con asíntotas los vectores a1y a2 (los ejes) recorridas viniendo deleje OY y alejándose hacia el eje OX.
• P2 = (−2, 0) : A(−2, 0) =∙−4 00 2
¸, cuyos autovalores y autovectores son λ1 = −4, con a1 =
∙10
¸y λ2 = 2,
con a2 =∙01
¸. Se trata entonces de un punto de silla, por lo que es inestable. La configuración de las órbitas
próximas es similar a la de hipérbolas con asíntotas en los ejes recorridas viniendo del eje OX y alejándose haciael eje OY.
• P3 = (√2,√2) : A(
√2,√2) =
∙2√2 2
√2
−√2√2
¸, cuyos autovalores son λ = 3
2
√2 ± 1
2 i√14, las soluciones de la
ecuación λ2 − 3√2λ + 8 = 0. Se trata por tanto de un foco inestable
¡Reλ = 3
2
√2 > 0
¢. La configuración de
órbitas próximas es similar a espirales que se alejan del punto girando en sentido horario (negativo), lo quese reconoce por ser negativo el elemento A21 = −
√2 y se verá confirmado cuando estudiemos el campo de
direcciones.
• P4 = (−√2,−√2) : A(−
√2,−√2) =
∙−2√2 −2
√2√
2 −√2
¸, cuyos autovalores son λ = −32
√2 ± 1
2 i√14, las
soluciones de la ecuación λ2 + 3√2λ + 8 = 0. Se trata por ello de un foco estable
¡Reλ = −32
√2 < 0
¢.y por
tanto asintóticamente estable La configuración de órbitas próximas es similar a espirales que se acercan al puntogirando en sentido antihorario (positivo), lo que se reconoce por ser positivo el elemento A21 =
√2 y se verá
confirmado cuando estudiemos el campo de direcciones.
Orbitas rectas:
• verticales (x = k) : x = k será una orbita si, y solo si, x = 0 = k2 + y2 − 4 ∀y, pero eso no se verifica paraningún valor de k, luego no existen orbitas rectas verticales.
16

• no verticales (y = mx+ n) : la recta y = mx+ n será una órbita si, y solo si,
y0 = m =y
x=(mx+ n) (mx+ n− x)
x2 + (mx+ n)2 − 4
, ∀x
lo que equivale a que sea m³x2 + (mx+ n)2 − 4
´− (mx+ n) (mx+ n− x) = 0, ∀x, lo cual, reagrupando los
términos según potencias de x equivale a que todos los coeficientes del correspondiente polinomio sean nulos:¡2m+m3 −m2
¢x2 +
¡2m2n− 2mn+ n
¢x+
¡mn2 − 4m− n2
¢= 0.
Respecto al primer coeficiente, 2m+m3 −m2 = m¡m2 −m+ 2
¢= 0 ⇐⇒ m = 0 ya que el factor m2 −m+ 2
solo se anula si m es complejo. Análogamente, el segundo coeficiente 2m2n− 2mn+ n = n¡2m2 − 2m+ 1
¢solo
se anula para n = 0 ya que 2m2− 2m+1 no tiene raices reales. Puesto que para m = n = 0 tambien se anula eltercer coeficiente, la recta y = 0 es una órbita (o un conjunto de órbitas) y es la única recta no vertical con esapropiedad.
Lineas lugar geométrico de puntos con tangente vertical (x = 0) : la circunferencia x2 + y2 = 4 de centro el origen yradio 2.
Lineas lugar geométrico de puntos con tangente horizontal (y = 0) : las rectas y = 0 (el eje OX) e y = x (la bisectrizdel primer y tercer cuadrantes.
Nótese que, como era de esperar, las intersecciones de ambos tipos de líneas se producen en los puntos críticosantes obtenidos. Asimismo se confirman las orbitas rectas en el eje OX.
Campo de direcciones:Las líneas anteriores delimitan 8 regiones del plano, cuatro dentro de la circunferencia x2+y2 = 4 (donde es x < 0)
y cuatro fuera (donde x > 0).De las citadas ocho regiones hay cuatro situadas en los angulos agudos comprendidos entre el eje OX (la recta
y = 0) y la recta y = x. Dos están en el primer cuadrante (en ellas es y > 0, y < x) y las otras dos en el tercero (enellas es y < 0, y > x). En las cuatro se tiene que y < 0.Las otras cuatro regiones están situadas sobre los angulos obtusos y en ellas es y > 0. (y > 0 e y > x en las
que contienen el segundo cuadrante y la mitad adyacente del primero; y < 0 e y < x en las que contienen el cuartocuadrante y la mitad adyacente del tercero).
Esquema del plano de fases:Con todos los datos anteriores podemos realizar un dibujo esquemático del plano de fases.
17

18

7 P 4.20Sea el sistema de ecuaciones diferenciales ( ·
x = x(2y − x− 1),·y = y(1− x).
a) Calcular los puntos de equilibrio caracterizando su tipo y estabilidad.
b) Obtener las órbitas que son rectas.
c) Esbozar el plano de fases.
d) Si x(0) > 0 e y(0) > 0, ¿qué se puede decir de limt→+∞
x(t) y de limt→+∞
y(t)?
Solución:a) Los puntos de equilibrio son las soluciones del sistema½
f(x, y) = x(2y − x− 1) = 0g(x, y) = y(1− x) = 0
Si x = 0 necesariamente ha de ser tambien y = 0, con lo que obtenemos el primero, dado por P1 = (0, 0).Si x 6= 0 entonces ha de ser 2y − x− 1 = 0, es decir, y = x+1
2 con lo que resulta¡x+12
¢(1− x) = 0. Las dos únicas
posibilidades de que eso suceda son que sea x = 1 o x = −1. Obtenemos asi los otros dos puntos críticos P2 = (1, 1) yP3 = (−1, 0) y no hay mas que los tres obtenidos.Para analizarlos utilizamos la matriz Jacobiana
H(x, y) =
∙fx fygx gy
¸=
∙2y − 2x− 1 2x−y 1− x
¸En P1 = (0, 0) tenemos A1 = H(0, 0) =
∙−1 00 1
¸cuyos autovalores son λ1 = −1 y λ2 = 1 con autovectores
correspondientes a1 = [1, 0]t y a2 = [0, 1]t. La configuración local es la de un punto de silla, las asíntotas de lastrayectorias son paralelas a los ejes y el sentido de recorrido de forma que vienen en la dirección del horizontal y sevan en la dirección del vertical. Obviamente se trata de un punto de equilibrio inestable.
En P2 = (1, 1) tenemos A2 = H(1, 1) =
∙−1 2−1 0
¸cuyos autovalores son las soluciones de¯
−1− λ 2−1 −λ
¯= λ (1 + λ) + 2 = λ2 + λ+ 2 = (1 + λ)2 + 1 = 0,
es decir, λ1 = −1+ i y λ2 = −1− i . La configuración local es la de un foco, asintóticamente estable al ser negativa laparte real de los autovalores. El sentido de giro lo proporcionará el campo de direcciones. No obstante, puesto que enel sistema linealizado es
·y = −x es claro que se cortará al semieje real positivo hacia abajo y al semieje real negativo
hacia arriba, luego se girará en sentido horario, es decir, en sentido negativo, como después se podrá comprobar.
En P3 = (−1, 0) tenemos A3 = H(−1, 0) =∙1 −20 2
¸cuyos autovalores son λ1 = 1 y λ2 = 2 con autovectores
correspondientes a1 = [1, 0]t y a2 = [2,−1]t. La configuración local es la de un nodo inestable, las trayectorias
son curvas similares a parábolas que se alejan del punto de equilibrio al principio tangentes al eje real y al final endirecciones paralelas al vector a2 = [2,−1]t.b) Para ver si hay órbitas rectas, comenzaremos con las de la forma y = mx+ n. Existirán si, y solo si,
m =dy
dx=
·y·x=
y(1− x)
x(2y − x− 1) =(mx+ n) (1− x)
x(2 (mx+ n)− x− 1)es decir para aquellos valores de m y n que verifiquen
mx(2 (mx+ n)− x− 1)− (mx+ n) (1− x) = 2m2x2 + (2mn− 2m+ n)x− n ≡ 0lo cual solo sucede para m = n = 0. La recta y = 0 es la única trayectoria recta de este tipo.Por último probaremos con trayectorias rectas verticales de la forma x = k, las únicas no incluidas en la forma
anterior. Existirán si, y solo si,·x = k(2y− k− 1) = −k2+2ky− k ≡ 0, lo cual solo sucede si es k = 0. La recta x = 0
es la única trayectoria recta vertical.c) Empezaremos analizando las líneas lugar comun de puntos con tangente horizontal (o más brevemente ”líneas detangente horizontal”) y las de tangente vertical. Las líneas de tangente horizontal son y = 0 y x = 1, ya que ensus puntos es
·y = 0. Las líneas de tangente vertical son x = 0 y 2y − x − 1 = 0 por razón análoga. Confirmamos
ahora gráficamente que los puntos de intersección de líneas de diferente tipo son los puntos críticos antes obtenidos yanalizados.
19

Seguimos con el estudio del campo de direcciones en cada una de las 10 regiones delimitadas por las líneas anteriores.Hay seis situadas en el semiplano superior:En R1 = {y > 0, x < 0, 2y − x− 1 > 0} es ·
y > 0,·x < 0.
En R2 = {y > 0, 0 < x < 1, 2y − x− 1 > 0} es ·y > 0,
·x > 0.
En R3 = {y > 0, x > 1, 2y − x− 1 > 0} es ·y < 0,
·x > 0.
En R4 = {y > 0, x > 1, 2y − x− 1 < 0} es ·y < 0,
·x < 0.
En R5 = {y > 0, 0 < x < 1, 2y − x− 1 < 0} es ·y > 0,
·x < 0.
En R6 = {y > 0, x < 0, 2y − x− 1 < 0} es ·y > 0,
·x > 0.
Para las cuatro situadas en el semiplano inferior:En R7 = {y < 0, x < 0, 2y − x− 1 > 0} es ·
y < 0,·x < 0.
En R8 = {y < 0, x < 0, 2y − x− 1 < 0} es ·y < 0,
·x > 0.
En R9 = {y < 0, 0 < x < 1, 2y − x− 1 < 0} es ·y < 0,
·x < 0.
En R10 = {y < 0, x > 1, 2y − x− 1 < 0} es ·y > 0,
·x < 0.
Con toda la información obtenida podemos hacer el esbozo que se nos pide del plano de fases:
d) Dado el carácter del punto (1,1) y a la vista del esbozo del plano de fases, es bastante evidente que, si x(0) > 0 ey(0) > 0, entonces
limt→+∞
x(t) = limt→+∞
y(t) = 1.
20

8 P 4.21Sea el sistema plano de ecuaciones diferenciales⎧⎪⎨⎪⎩
x =x2
2− y − 1
2
y = −x2
2− y +
1
2.
a) Obtener sus puntos de equilibrio, analizar su tipo y estabilidad y especificar la configuración de las trayectoriaspróximas.
b) Hallar el campo de direcciones, incluyendo las líneas de tangente vertical y horizontal. Determinar, si existen,trayectorias u órbitas rectas. Hacer un esbozo del plano de fases.
c) Siendo [x(t), y(t)] la solución del sistema para la que x(0) = y(0) = 0, deducir los valores de
limt→+∞
x(t) y limt→+∞
y(t).
Solución:a) Para encontrar los puntos críticos o de equilibrio resolvemos el sistema formado por las dos ecuaciones:
f(x, y) =x2
2− y − 1
2= 0,
g(x, y) = −x2
2− y +
1
2= 0.
Sumándolas resulta y = 0, con lo que la primera ecuación se convierte en x2 = 1, de donde x = ±1 y se obtienenP1 = (1, 0) y P2 = (−1, 0) como únicos puntos de equilibrio.Para analizarlos observamos que la matriz jacobiana del sistema es
A(x, y) =
∙fx fygx gy
¸=
∙x −1−x −1
¸.
Estudiaremos el comportamiento del sistema linealizado correspondiente a cada punto crítico:
• P1 = (1, 0) : A(1, 0) =∙1 −1−1 −1
¸, cuyos autovalores y autovectores son λ1 = −
√2, con a1 =
∙1 +√2
−1
¸y
λ2 =√2, con a2 =
∙1
1 +√2
¸. Se trata entonces de un punto de silla, por lo que es inestable. La configuración
de las órbitas próximas es similar a la familia de hipérbolas con asíntotas los vectores a1 y a2 recorridas viniendode la dirección de a1 y alejándose hacia la de a2.
• P2 = (−1, 0) : A(−1, 0) =∙−1 −11 −1
¸, cuyos autovalores son λ = −1 ± i, las soluciones de la ecuación
λ2 + 2λ+ 2 = 0. Se trata por ello de un foco estable (Reλ = −1 < 0) .y por tanto asintóticamente estable. Laconfiguración de órbitas próximas es similar a espirales que se acercan al punto girando en sentido antihorario(positivo), lo que se reconoce por ser positivo el elemento A21 = 1 y se verá confirmado cuando estudiemos elcampo de direcciones.
b) Comenzaremos analizando si existen órbitas o trayectorias rectas, determinaremos las líneas lugares geométricosde puntos con tangente vertical y las de tangente horizontal, para estudiar después el campo de direcciones en cadauna de las regiones determinadas por dichas líneas. Finalmente esbozaremos el plano de fasesÓrbitas rectas:
• verticales (x = k) : x = k será una órbita si, y solo si, x = 0 = k2
2 − y − 12 ∀y, pero eso no se verifica para
ningún valor de k, luego no existen órbitas rectas verticales.
• no verticales (y = mx+ n) : la recta y = mx+ n será una órbita si, y solo si,
y0 = m =y
x=2y
2x=−x2 − 2 (mx+ n) + 1
x2 − 2 (mx+ n)− 1 , ∀x
lo que equivale a que sea m¡x2 − 2 (mx+ n)− 1
¢−¡−x2 − 2 (mx+ n) + 1
¢= 0, ∀x, lo cual equivale a que,
reagrupando los términos según potencias de x, todos los coeficientes del correspondiente polinomio sean nulos:
(m+ 1)x2 +¡2m− 2m2
¢x+ (2n− 1− 2mn−m) = 0.
Respecto al primer coeficiente, m + 1 = 0 ⇐⇒ m = −1. Análogamente, el segundo coeficiente 2m − 2m2 =2m (1−m) sólo se anula para m = 0 o para m = 1. Por tanto, no puede haber órbitas rectas no verticales,independientemente de lo que ocurra con el tercer coeficiente (el término independiente).
21

Lineas lugar geométrico de puntos con tangente vertical (x = 0) : la parábola y = 12x
2 − 12 de eje vertical y ramas
hacia arriba, con vértice en¡0,−12
¢y pasando por los puntos de equilibrio.
Lineas lugar geométrico de puntos con tangente horizontal (y = 0) : la parábola y = −12x2+12 de eje vertical y ramas
hacia abajo, con vértice en¡0, 12
¢y pasando por los puntos de equilibrio, simétrica de la anterior respecto al eje OX.
Nótese que, como era de esperar, las intersecciones de ambos tipos de líneas se producen en los puntos críticosantes obtenidos.
Campo de direcciones:Las líneas anteriores delimitan 5 regiones del plano, una que contiene al origen, a la que llamaremos R1 y cuatro
que no lo contienen a las que denominaremos R2, R3, R4, R5, recorridas en sentido horario empezando por la situadapor encima de ambas parábolas.De las citadas cinco regiones hay dos situadas por encima de la parábola y = 1
2x2− 1
2 , que son R1 y R2, en las quees x > 0. Las otras tres están situadas por debajo y por tanto en ellas es x < 0.Por similares razones, en R1 y R4 es y < 0 mientras que en R2, R3 y R5 es y > 0.
Esquema del plano de fases:Con todos los datos anteriores podemos realizar un dibujo esquemático del plano de fases.
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
c) A la vista del plano de fases y con la información de que se dispone se deduce que la órbita que pasa por elorigen acaba dirigiéndose hacia el foco situado en el punto (−1, 0), por lo que, para la citada solución,
limt→+∞
x(t) = −1 y limt→+∞
y(t) = 0.
22





























