Embed Size (px)
Citation preview

Research ArticleAn Improved Genetic Algorithm to Optimize Spatial Locationsfor Double-Wishbone Type Suspension System with Time Delay
Qiang Li 12 Xiaoli Yu 3 and JianWu12
1School of Mechanical amp Automotive Engineering Zhejiang University of Science and Technology Hangzhou 310023 China2Provincial Key Laboratory of Food Logistics Equipment amp Technology Zhejiang University of Science and TechnologyHangzhou 310023 China3Power Machinery amp Vehicular Engineering Institute Zhejiang University Hangzhou 310013 China
Correspondence should be addressed to Qiang Li liqiang1353163com
Received 17 June 2017 Accepted 10 October 2017 Published 20 February 2018
Academic Editor Radek Matusu
Copyright copy 2018 Qiang Li et alThis is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
By taking account of double-wishbone independent suspension with two unequal-length arms the coordinate values of articulatedgeometry are based on structural limitations and constraint equations of alignment parameters The sensitivities of front wheelalignment parameters are analyzed using the space analytic geometry method with insight module in ADAMS software Themultiobjective optimization functions are designed to calculate the coordinate values of hardpoints with front suspension since theeffect of time delay due to wheelbase can be easily obtained by vehicle speedThe KampC characteristics have been investigated usingGA solutions in the simulation environment The camber angle decreases from 1152∘ to 105∘ and toe-in angle reduces from 1036∘to 0944∘ The simulation results demonstrate that the suggested optimization method is able to satisfy the suspension motion toenhance ride comfort Experimental results obtained by KampC test bench also indicate that the optimized suspension can track thedesired trajectory while keeping the vehicle performance in various road conditions
1 Introduction
Modern automotive engineers have paid more and moreattention to the suspension system almost as soon as theywere always concerned about automotive performance partsand accessories more than power and acceleration [1 2]To correspond with the increased demand for suspensionsystem various optimization methods have penetrated intothe practical application over the last two decades [3ndash7] Thepurpose of suspension with flexibly connecting the wheels tothe vehicle frame is to provide good handling and harshnesswith steering stability to ensure the passengers comfort whilemaximizing the friction between the tires and road surface
The suspension guides respective up-and-down wheelmotions by actuating two wishbone-shaped control armscomprising sixmounting positions and corresponding jointsThere are three joints in individualistic control arm The twojoints link with the vehicle frame and the other joint connectswith the wheel hub
The coil springs and dampers (shock absorbers) are ori-ented along the bell crank through the pushrods or pullrodsin view of the nonlinear time delay system The spring anddamper apparatus convert up-and-down wheel motions toback-and-forth movements that capture the lagged charac-teristics of road excitations
Since the double-wishbone suspension as an importantchassis part can rapidly deviate from its desired path espe-cially the widely used unequal length of upper and lower con-trol arm (long short arm LSA) the kingpin inclination smalldelays or lags can lead to deteriorating the real-time vehicleperformanceThe optimal solution of suspension parameterscan be tuned to meet the scope of tread in alignment withinacceptable limit levels As a result because of adjusting spatiallocations in the unequal-length double-wishbone suspen-sions the understeeringoversteering dynamics behaviorsthat express ldquopushingrdquo or ldquolooserdquo phenomenon of a vehiclevary widely with changes in various operating conditionsFrom sixteenth-century wagons to nowadays Formula one a
HindawiMathematical Problems in EngineeringVolume 2018 Article ID 6583908 8 pageshttpsdoiorg10115520186583908
2 Mathematical Problems in Engineering
wide range of studies that coordinates optimization methodand nonlinear time delay system to enhance the ride andhandling characteristics has been introduced
Tak et al [8] develop the kinematic static sensitivity equa-tions to meet some prescribed performance targets duringthe whole optimization procedure Suh et al [9] conductthe influences of the change of rear suspension geometryto investigate the handling performances of a large-sizedbus Park et al [10] discuss the ADAMS full vehicle modelin driving condition based on the on-board measurementsand transformation matrix Kim et al [11] examine effect onhands-free stability of steering and suspension design vari-ables to prove their correlationswithADAMSCar simulationmethods The numerical simulation models and optimalsolution procedures have high degree of complexity Thesensitivity analysis has not been explicitly defined with highcorrelativity with suspension parametersThe shortcoming oftraditional optimization algorithm has only one directionalpreset track
The research results have also shown that several GeneticAlgorithm (GA) control strategies [12ndash15] are extensivelyinvestigated in the development of linkage kinematics withoptimal configuration in many commercial software pro-grams such as ADAMS and Visual C++ Mitchell et alevaluate the impact of multiple independent metrics withthe assistance of a user selectable weighting use of GAYan et al [16] study GA-optimized fuzzy controller bymeans ofMATLAB-ADAMS union simulationTheGA givesthe best performances on each optimized circuit to fastendesign processes and narrows and chooses the best one fromalternate optimal solutions
The paper is organized as follows Section 2 defines noveldesign method of the double-wishbone type suspension Thequasi-static suspension models are evaluated using ADAMSThe sensitivity analyses are examinedwith several hardpointsThe binary string with certain design valuables considered asa chromosome is determined in Section 31 The comparisonof dynamic wheel alignments with computation suspensionand steering model and actual best bench are obtainedin Section 34 Finally we conclude that the validation ofoptimization method and procedure are presented to meetprescribed performance targets in Section 4
2 Modelling and Static Analysis
21 Background for Suspension Model The double-wishbonetype suspension known as an A-arm construction is widelyused for front 119899 and rear axles with separate type steeringtrapezium especially in mainstream larger cars and racingcars The double-wishbone type suspension can easily mod-ify the interaction between the tire and the road surfaceto achieve the improved maximum friction The double-wishbone type suspension has proven itself as one of theeffective mechanics that enhances the ride and handlingability to steer brake and accelerate Meanwhile it hasadvantages in the fact that it has contributed to eliminationor minimization of lateral load transfer distribution for thesake of more consistent road feeling
F
Z
Y
X
K
C
H
J
G
L
B
A
I
E
D
Figure 1 Schematic diagramof a front-right LSA suspension systemand steering mechanism
It is essential to design the hardpoint positions at thebeginning stage through the Cartesian (absolute) coordinatesin order to establish a unified standard for different workgroups The optimal method of rear hardpoint positions canbe easily calculated by less constraint equations without con-sidering the length of tie rodThe camber at steering knuckleposition is designed to ensure symmetry and Ackermanngeometry status during steering Also it is a very different taskfor chassis assignment of checking movement interventions
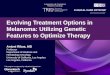
22 Structure of LSA Suspension For the double-wishbonetype suspension tie rod is the line connecting two pointsof spherical joints 119866 and 119868 (rack and pinion type steeringsystem) triangle DEF and ABC are composed of upper andlower control arm which revolve about the 119863119865 axis and 119860119862axis respectively 119864 and 119861 indicate upper and lower sphericaljoints to the steering knuckle separately The axes 119866119871 and119864119861 separately represent the steering knuckle arm and steeringaxis inclination (SAI) also called kingpin inclination (KPI)The axis 119869119867 expresses the wheel linkage with kingpin The119870 point can simplify to be regarded as contact point ofwheel tread As an example a double-wishbone type frontsuspension system as illustrated in Figure 1 is a combinationof steering mechanism four degrees of freedom (DOF)Thus constraint equations can be expressed before and aftermoving using initial points as rigid body motion
The constrain equations of vertical relationships can bededuced by
(119909119867 minus 119909119869) (119909119870 minus 119909119867) + (119910119867 minus 119910119869) (119910119870 minus 119910119867)+ (119911119867 minus 119911119869) (119911119870 minus 119911119867) = 0
(1)
After LSA suspension moving the new orientation of theball joints (denoted by 1199091015840 1199101015840 1199111015840) can be denoted based on thenew location of SAI
The constraint equations of constant distances can bewritten as
Δ119909 119910 119911 = (119909 119910 119911) minus (1199091015840 1199101015840 1199111015840)
119897 = radic(Δ119909)2 + (Δ119910)2 + (Δ119911)2(2)
Mathematical Problems in Engineering 3
Table 1 Original design variables of hardpoint positions in front suspension system (mm)
Axis 119874 119860 119861 119862 119863 119864 119865 119866 119867119909 0 minus1466 minus102 1263 minus1466 1263 78 minus700 0119910 0 1962 5712 1962 2615 5552 2615 5712 622119911 0 minus1343 minus1293 minus1343 757 995 757 minus100 0
The new locations of upper spherical joints connectingthe steering knuckle can be expressed by
119897119864119861 = 1198971015840119864119861
119897119864119865 = 1198971015840119864119865
119897119864119863 = 1198971015840119864119863
(3)
Similarly the new positions 119866 and 119867 can be provided by
119897119864119866 = 1198971015840119864119866
119897119868119866 = 1198971015840119868119866
119897119861119866 = 1198971015840119861119866
119897119864119867 = 1198971015840119864119867
119897119861119867 = 1198971015840119861119867119897119866119867 = 1198971015840119866119867
(4)
Constraint equations are solved for the correspondinglocations of the lower and upper control arms using MAT-LAB
To describe the three-dimensional kinematic model forsuspension characteristics and wheel movements the orig-inal hardpoint positions in the front-right LSA suspensionsystem are listed in Table 1
23 Dynamic Responses The front LSA suspension is mod-elled using ADAMS as a multibody simulation tool [17] Thesuspension consists of a Panhard bar to withstand the tireprincipal lateral force an upper control arm and a lowercontrol arm which are subject to decomposing longitudinaldriving braking and vertical forces The steering systemcomprises a steering wheel a steering column pitman armrack and pinion gearbox as indicated in Figure 2 Thedistribution coefficient of the total weight can be optimizedby adjusting mount positions and spring perches of controlarms
To compare the effects of different coordinate values ofhardpoints the dynamic responses of the LSA suspension aredeveloped to evaluate the relationship between ride comfortand handling for specifying spring stiffness and damper rateunder road load conditions The dynamics ADAMS modelthat is integrated with steering system and suspension systemexpressed as boundary conditions are developed to comparethe performances of current designs
In static analysis the wheel travel of LSA suspensionis updated with a range from minus30mm to 30mm to reflect
Figure 2 Simulationmodel of front suspension system and steeringmechanism
Wheel travel (mm)403020100minus10minus20minus30minus40
1230
1230
1231
1232
1232
1232
1233
Fron
t tre
ad (m
m)
Figure 3 Variations of wheel travel related to front tire tread
the changes of tread curve as illustrated in Figure 3 Wheeltravel measures use the following convention positive valuesindicate compressionmotion whereas negative displacementrepresents extension process The simulation results revealsignificant effect of wheel travel on tire tread The largerthe wheel travel along with up or down direction variesthe higher the change rate the tire tread generates is Theproposed positions of tie rod joint and length of steeringpitman arm as important structural parameters distinguishthe front suspension from the rear one considering spatialconstraints and attribute constraints
24 Sensitivity Analysis The INSIGHT module fromADAMS finds the parameter sensitivity analyses thatminimize the effects of road excitation or other disturbancesupon the tires movement while satisfying the constraints onthe double-wishbone type suspension geometry constraintsThe suspension compliances are specified by variancefunctions that aim to describe the influence of the
4 Mathematical Problems in Engineering
Table 2 Sensitivity analysis of design variables
Hardpoints Toe Camber SAI Caster119910119860(1199091) minus107 001 002 0119911119860(1199092) minus342 177 135 minus116119910119862(1199093) minus108 001 001 001119911119862(1199094) minus296 1741 1365 068119910119863(1199095) minus026 minus156 minus161 042119911119863(1199096) minus068 minus1651 minus1684 101119910119865(1199097) minus022 minus152 minus161 minus037119911119865(1199098) minus028 minus161 minus1707 minus197119910119866(1199099) minus132 minus001 0 0119911119866(11990910) 826 minus76 015 015
coordinates of hardpoints during operations The wheelgeometry parameters that affect the steerability of the vehicleare camber caster SAI and toe
The sensitivity results of wheel geometry parameterscan be calculated as the steering effort and steering wheelreturnability produced by the tires to predict the behaviorsof vehicle as shown in Table 2 The negative caster anglescan reduce the steering effort but weaken the steering wheelreturnability Smaller SAI angles can be favourable to steeringeffort but deteriorate the steering wheel returnability as wellFor that purpose optimal approaches of design parameterschanges used to require trade-offs to retain mutual balanceThe sensitivity characteristics of different wheel alignmentparameters are strongly correlated with hardpoint positionsof control arms in the suspension system
In Table 2 the different contributing levels of eachhardpoint position have been revealed to their effects onthe variations of wheel alignments The SAI angle is mainlydependent on the vertical locations of 119860 119862 119885 and 119865 pointsthe toe angle depends on the vertical locations of 119860 119862and 119866 points The vertical locations of 119860 119864 and 119865 pointsas the design important parameters have a significant effecton camber angle on steering response The data analysis ofTable 2 allows us to explore potential of optimization of thelocations of critical hardpoints with multiobjective functionand geometry constraints
3 Optimization and Simulation
31 GA Optimization Method Genetic Algorithms as opti-mization techniques using powerful and global search meth-ods imitate the processes present in natural evolution basedon Darwinianrsquos survival of the best fitness theory [18ndash21]Three coral and repeating stages mainly consist of selectioncrossover andmutationTherefore the biological individualscontained in design variables as a population can be con-verted into one long informative string It is a convenient wayto regard binary segments encoding the optimal parametersas a chromosome The convergence of population membersis checked and updated at each time step after the evaluationof fitness The fitness functions are considered within 4 forall population members to guide next steps towards optimaldesign solutions The best member of the current population
Start
Initialize population
Gen = 1
Evaluate population
Converged
Gen = Gen + 1
Gen = Max
End
Selection
Crossover
Mutation
No
Yes
Figure 4 Flow chart of GA optimization process
is alive and gains higher probability of reproduction whichwill form a new offspring It is the best solution that improvesindividual genetic characteristics generation until the optimalfitness set is obtained
In the selection part multiple population members arechosen at random conditions to produce the best one basedon their fitness functions The hypothetical individuals withhigher fitness are reproduced by processes of crossoverand mutation to generate the new offspring Repetitionof the processes brings about evolutionary population thatstrengthens their fitness function After selecting one outof three members the process repeats until the number ofselected members matches the population size Then themating mechanism manipulates the genomes of the parentbased on crossover stage Firstly the two selected memberscreate two members of the new population Then twomembers are added to create the next generation under adefined crossover limit Since the crossover operation thealgorithm of mutation allows for the possibility that somealternatives of the available population in the initial randomlycan be represented within a mutation limit set The mutationrate uses 1 in the GA arithmetic process as shown inFigure 4
The procedure of the generic multiobjective GA is givenas follows
Step 1 Generate a random initialized population
Step 2 For each objective Gen Gen = 1 2 119896 generate arandom number and weight for each objective
Step 3 Evaluate the fitness of the solution in the sortedpopulation and calculate the selection probability of eachsolution
Mathematical Problems in Engineering 5
Table 3 Comparison between original and optimized parameters of the LSA suspension mm
Design variables 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863 119910119865 119911119865 119910119866 119911119866Original 1962 minus1343 1962 minus1343 2615 757 2615 757 5742 minus80Optimized 2052 1293 2052 1293 2605 747 2605 747 5752 minus75
Step 4 Select parents using the selection probabilities inStep 3
Step 5 Apply the crossover on the selected parent pairs tocreate new offspring
Step 6 Mutate the offspring created in Step 5 with a pre-specified mutation rate and put all the offspring into the newpopulation
Step 7 If the stopping condition (Gen =Max) is not satisfiedset Gen = Gen + 1 and go to Step 3 Otherwise end theprocedure
32 GA Optimizing Suspension Model The aim is to find theoptimal coordinates of hardpoints which are the key locationsto influence on suspension characteristics according to theirrelative orientations The design procedure accomplishesa suitable compromise between resolution accuracy andcomputational speed In order to investigate the effect ofgeometry changes on suspension displacement limited to itsfree travel the vertical and lateral direction of five hardpoints(119860 119862119863 119865 and119866) are selected as optimization variables andencoded into a binary string with fixed length
The length of whole chromosome string has eight bitsin GA optimization solution process because eight bits cor-respond to each value of parameter 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863119910119865 119911119865 119910119866 and 119911119866 respectively
For example 1198781 represents 00100100 which means thecorresponding decimal values given as
119910119860 = 119883119910119860min +119889119910119860
28 minus 1 (119883119910119860min minus 119883119910119860max) (5)
where 119883119910119860min and 119883119910119860max are the limit range for the coordi-nates of hardpoint 119910119860 and 119889119910119860 represents the binary value for1198781
The aim of the optimization work is to minimize thesum of dynamic changes of wheel alignments The designvariations of hardpoint positions could be performed forgeometry constrains and multiobjective optimizations
After the preceding analysis a GA optimization pro-gram is compiled and verified via implementation of virtualsimulations The block diagram representation of the GAoperation process is given in Figure 5with the aimof reachingminimum error To correspond with the actual demandfor the variation ranges in the wheel alignments and LASsuspension system the corresponding original and optimizedvalues of hardpoint positions are shown in Table 3
33 Performance Analysis with Time Delay When the con-straints in multiobjective optimizations are activated the
LSA suspensionstructure
Hardpoints
Characteristic
Modelling
Kinematostatic
Sensitivity
Analysis
Optimization
Output results
Evaluate fitness
Convergence Selection
Crossover
Mutation
Convert chromosomes
No
Yes
Figure 5 Block diagram of GA optimization program
suspension system parameters such as spring constant anddamping coefficient need to reconsider the effect of timedelay on dynamic behavior due to the distance of front andrear axles (wheelbase) and different velocity
The dynamic behavior can be correctly simulated bytaking into account the value of time delay caused by the roadexcitations at the front and rear axles
119902119891 (119905) = 119902119903 (119905 + 120591) (6)
where 119902119891(119905) and 119902119903(119905) are displacement excitations at frontand rear axles respectively and 120591 means time delay whichcan be calculated as follows
120591 = (119886 + 119887)V
(7)
where 119886 and 119887 are the distance of mass center from front andrear axle separately and V represents vehicle speed
The parameters of vehicle are summarized in Table 4The white noise disturbance that generates normally
distributed random numbers such as a sequence feeds theinput of nonlinear time delay model with the following set ofparameters noise power (the road roughness coefficient) 119875 =256 times 10minus6 and sample time 119879119890 = 001 s
For the value of time delay corresponding velocity ofvehicle is computed by (7) Vℎ = 80 kmh indicates 1205911 =
6 Mathematical Problems in Engineering
Table 4 Specification of the selected suspension system
119898119904 kg 119898119906 kg 119896119904 Nm 119896119905 Nm 119862119904 Nsm 119886 m 119887 m240 36 16000 160000 1400 12 13
Front suspensionRear suspension t1Rear suspension t2
04 06 08 1 12 14 16 1802
Time (sec)
minus5
0
5
10
Body
acce
lera
tion
(ms
e=2)
Figure 6 Time history of the body accelerationwith different valuesof time delay
01125 s and V119897 = 40 kmh means 1205912 = 0225 s Theeffects of different time delay are shown in Figure 6 Thetime delay is not a constant but varies with the vehiclespeed and the road roughness coefficient The variation offrequency characteristic is activated to diminish time delaythat is followed by increasing vehicle speed It is obvious thatvehicle body acceleration increases with time delay whichdeteriorates ride comfort of the driver
The frequency response analyses from the road dis-placement to the body vertical acceleration and suspensiondistortion are obtained by high vehicle speed and low vehiclespeed as in Figures 7 and 8
At low frequency suspension provides a satisfied damp-ing of the body vertical acceleration but a bad filter of midand high frequencies On the other hand a high time delayensures a good filtering but a badly damped body verticalacceleration
34 Simulation and Experiment To correspond with thekinematics simulation analysis the double-wishbone typesuspension is designed with understeer characteristics Thesimulation and experimental curves are illustrated in com-parison with original and optimization toe and camber of thefront suspension travel in Figures 9 and 10
The camber angle decreases from 1152∘ to 105∘ and toe-inangle reduces from 1036∘ to 0944∘Thenonlinear suspensionsystem with different values of time delay is investigatedby numerical simulation The travel displacements fromminus30mm to 30mm are utilized on front-right suspensionIn Figure 9 it has been proved that the typical toe-outcharacteristics with a negative camber angle are beneficialto maintain the track path The toe angle has a tendency
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus1
100
101
102
103
Body
acce
lera
tion
road
disp
lace
men
t (dB
)
Figure 7 Frequency responses road displacement to body verticalacceleration
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus2
10minus1
100
101
Susp
ensio
n di
stort
ion
road
disp
lace
men
t (dB
)
Figure 8 Frequency responses road displacement to suspensiondistortion
with relatively small variation which improves the steeringresponse and road feeling at different suspension travelsAs shown in Figure 10 the comparison with camber angleof original and optimization coordinates is obtained withthe tire bouncing from the lowest position to the highestposition The two curves of camber angle are fitted wellexcept for two ends of the suspension travel The negative
Mathematical Problems in Engineering 7
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus08
minus06
minus04
minus02
0
02
04
Toe a
ngle
(deg
)
Figure 9 Block diagram of GA operation on LSA suspension andsteering mechanism
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus18
minus16
minus14
minus12
minus1
minus08
minus06
minus04
Cam
ber a
ngle
(deg
)
Figure 10 Block diagram of GA operation on LSA suspension andsteering mechanism
camber angle is the biggest contributor to keeping the vehicleon its straight-line path At the compression and extensionprocesses of suspension motion the curves clearly indicatethe hysteresis characteristic model of suspension with theoptimization coordinates of hardpoint Also there are moredesirable characteristics for vehicle driving steerability thanbefore
The kinematics and compliance (KampC) facility is con-structed with optical autocollimator sensors that are usedto measure the toe and camber angle amplifiers and dataacquisition systems to record the values in the whole testcourse The test bench mainly consists of six hydraulicactuators to generate longitudinal lateral and vertical forceson two wheels with one axle as shown in Figure 11 Becauseof the compliance steer forces elastic bushing elements and
Figure 11 Kinematics and compliance test bench
motions between the tire and road surface in the simulationare different from the real test bench The influence of wheeltravels on front suspension is taken into account which isessential for performing the experiment of actual workingsituations The similarity of both simulation and testingcurves is in very good agreement with the extremes of wheel
4 Conclusions
By using multibody simulation tool the double-wishbonetype suspension (LSA) system has been built up for mea-suring values of the geometry and kinematic qualities Thesensitivity analysis process has been derived from a nonlinearcomputer model in order to optimize the principal designvariables of main hardpoints Consequently the suspensionmodel was simulated under certain driving conditions withoptimized values and different values of time delay The GAoptimal solutions have been tested andmodification of coeffi-cients was repeated for the elastic elements such as the springstiffness and damper It is necessary that the computer modeland prototype have been obtained to validate effectivenessof the proposed method The simulation and computationalprocedure can be applied to design an optimization problemof any other kind of suspension systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this manuscript
Acknowledgments
This research work was supported by International Science ampTechnology Cooperation Program of China (2013DFA31920)the National Key Research and Development Program ofChina (2017YFD0401304) and the National Natural ScienceFoundation of China (Grant no 51476143)
References
[1] M Heidari and H Homaei ldquoDesign a PID controller for sus-pension system by back propagation neural networkrdquo Journalof Engineering vol 2013 Article ID 421543 pp 1ndash9 2013
8 Mathematical Problems in Engineering
[2] C Tan R Xu Z Wang L Si and X Liu ldquoAn improvedgenetic fuzzy logic control method to reduce the enlargementof coal floor deformation in shearer memory cutting processrdquoComputational Intelligence and Neuroscience vol 2016 ArticleID 3973627 pp 1ndash14 2016
[3] D Ozcan U Sonmez and L Guvenc ldquoOptimisation of thenonlinear suspension characteristics of a light commercialvehiclerdquo International Journal of Vehicular Technology vol 2013Article ID 562424 pp 1ndash16 2013
[4] A Seifi R Hassannejad and M A Hamed ldquoUse of nonlinearasymmetrical shock absorbers in multi-objective optimizationof the suspension system in a variety of road excitationsrdquoProceedings of the Institution of Mechanical Engineers Part KJournal of Multi-body Dynamics vol 231 no 2 pp 372ndash3872017
[5] V Savsani V Patel B Gadhvi and M Tawhid ldquoPareto opti-mization of a half car passive suspension model using a novelmultiobjective heat transfer search algorithmrdquo Modelling andSimulation in Engineering vol 2017 Article ID 2034907 pp 1ndash172017
[6] V Mehta M Patel Y Gandhi and B Gadhvi ldquoAn experimentalapproach of estimating speed bump profile to optimizing thesuspension parameters using TLBOrdquo Journal of Advances inVehicle Engineering vol 2 no 2 pp 65ndash74 2016
[7] A Jamali H Shams and M Fasihozaman ldquoPareto multi-objective optimum design of vehicle-suspension system underrandom road excitationsrdquo Proceedings of the Institution ofMechanical Engineers Part K Journal of Multi-body Dynamicsvol 228 no 3 pp 282ndash293 2014
[8] T Tak S Chung and H Chun ldquoAn optimal design softwarefor vehicle suspension systemsrdquo SAE Technical Papers 2000-01-1618 2000
[9] K-H Suh Y-K Lee and H-M Jeong ldquoA study on thehandling performances of a large-sized bus with the change ofrear suspension geometryrdquo SAE Technical Papers 2002-01-30712002
[10] J Park J Yi and D Lee ldquoInvestigation into suspensiondynamic compliance characteristics using direct measurementand simulationrdquo SAE Technical Papers 2004-01-1065 2004
[11] H-S Kim W-J Do J-S Shim and S-R Choi ldquoThe stabilityanalysis of steering and suspension parameters on hands freemotionrdquo SAE Technical Papers 2002-01-0620 2002
[12] S A Mitchell S Smith A Damiano J Durgavich and RMacCracken ldquoUse of genetic algorithms with multiple metricsaimed at the optimization of automotive suspension systemsrdquoSAE Technical Papers 2004-01-3520 2004
[13] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[14] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash3682016
[15] A C Mitra G J Desai S R Patwardhan P H Shirke W MH Kurne and N Banerjee ldquoOptimization of passive vehiclesuspension system by genetic algorithmrdquo Procedia Engineeringvol 144 pp 1158ndash1166 2016
[16] J Yan Z Yin X Guo and C Fu ldquoFuzzy control of semi-active air suspension for cab based on genetic algorithmsrdquo SAETechnical Papers 2008-01-2681 2008
[17] S Hasagasioglu K Kilicaslan O Atabay and A Guney ldquoVehi-cle dynamics analysis of a heavy-duty commercial vehicle byusingmultibody simulationmethodsrdquoTheInternational Journalof AdvancedManufacturing Technology vol 60 no 5-8 pp 825ndash839 2012
[18] K Abdullah W C David and E S Alice ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[19] N Srinivas and K Deb ldquoMultiobjective optimization usingnon-dominated sorting in genetic algorithmsrdquo EvolutionaryComputation vol 2 no 3 pp 221ndash248 1995
[20] R Darvishi M N Esfahany and R Bagheri ldquoNumerical studyon increasing PVC suspension polymerization productivity byusing PSO optimization algorithmrdquo International Journal ofPlastics Technology vol 20 no 2 pp 219ndash230 2016
[21] J Wu Z Luo Y Zhang and N Zhang ldquoAn interval uncertainoptimization method for vehicle suspensions using Chebyshevmetamodelsrdquo Applied Mathematical Modelling vol 38 no 15-16 pp 3706ndash3723 2014
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Mathematical Problems in Engineering
wide range of studies that coordinates optimization methodand nonlinear time delay system to enhance the ride andhandling characteristics has been introduced
Tak et al [8] develop the kinematic static sensitivity equa-tions to meet some prescribed performance targets duringthe whole optimization procedure Suh et al [9] conductthe influences of the change of rear suspension geometryto investigate the handling performances of a large-sizedbus Park et al [10] discuss the ADAMS full vehicle modelin driving condition based on the on-board measurementsand transformation matrix Kim et al [11] examine effect onhands-free stability of steering and suspension design vari-ables to prove their correlationswithADAMSCar simulationmethods The numerical simulation models and optimalsolution procedures have high degree of complexity Thesensitivity analysis has not been explicitly defined with highcorrelativity with suspension parametersThe shortcoming oftraditional optimization algorithm has only one directionalpreset track
The research results have also shown that several GeneticAlgorithm (GA) control strategies [12ndash15] are extensivelyinvestigated in the development of linkage kinematics withoptimal configuration in many commercial software pro-grams such as ADAMS and Visual C++ Mitchell et alevaluate the impact of multiple independent metrics withthe assistance of a user selectable weighting use of GAYan et al [16] study GA-optimized fuzzy controller bymeans ofMATLAB-ADAMS union simulationTheGA givesthe best performances on each optimized circuit to fastendesign processes and narrows and chooses the best one fromalternate optimal solutions
The paper is organized as follows Section 2 defines noveldesign method of the double-wishbone type suspension Thequasi-static suspension models are evaluated using ADAMSThe sensitivity analyses are examinedwith several hardpointsThe binary string with certain design valuables considered asa chromosome is determined in Section 31 The comparisonof dynamic wheel alignments with computation suspensionand steering model and actual best bench are obtainedin Section 34 Finally we conclude that the validation ofoptimization method and procedure are presented to meetprescribed performance targets in Section 4
2 Modelling and Static Analysis
21 Background for Suspension Model The double-wishbonetype suspension known as an A-arm construction is widelyused for front 119899 and rear axles with separate type steeringtrapezium especially in mainstream larger cars and racingcars The double-wishbone type suspension can easily mod-ify the interaction between the tire and the road surfaceto achieve the improved maximum friction The double-wishbone type suspension has proven itself as one of theeffective mechanics that enhances the ride and handlingability to steer brake and accelerate Meanwhile it hasadvantages in the fact that it has contributed to eliminationor minimization of lateral load transfer distribution for thesake of more consistent road feeling
F
Z
Y
X
K
C
H
J
G
L
B
A
I
E
D
Figure 1 Schematic diagramof a front-right LSA suspension systemand steering mechanism
It is essential to design the hardpoint positions at thebeginning stage through the Cartesian (absolute) coordinatesin order to establish a unified standard for different workgroups The optimal method of rear hardpoint positions canbe easily calculated by less constraint equations without con-sidering the length of tie rodThe camber at steering knuckleposition is designed to ensure symmetry and Ackermanngeometry status during steering Also it is a very different taskfor chassis assignment of checking movement interventions
22 Structure of LSA Suspension For the double-wishbonetype suspension tie rod is the line connecting two pointsof spherical joints 119866 and 119868 (rack and pinion type steeringsystem) triangle DEF and ABC are composed of upper andlower control arm which revolve about the 119863119865 axis and 119860119862axis respectively 119864 and 119861 indicate upper and lower sphericaljoints to the steering knuckle separately The axes 119866119871 and119864119861 separately represent the steering knuckle arm and steeringaxis inclination (SAI) also called kingpin inclination (KPI)The axis 119869119867 expresses the wheel linkage with kingpin The119870 point can simplify to be regarded as contact point ofwheel tread As an example a double-wishbone type frontsuspension system as illustrated in Figure 1 is a combinationof steering mechanism four degrees of freedom (DOF)Thus constraint equations can be expressed before and aftermoving using initial points as rigid body motion
The constrain equations of vertical relationships can bededuced by
(119909119867 minus 119909119869) (119909119870 minus 119909119867) + (119910119867 minus 119910119869) (119910119870 minus 119910119867)+ (119911119867 minus 119911119869) (119911119870 minus 119911119867) = 0
(1)
After LSA suspension moving the new orientation of theball joints (denoted by 1199091015840 1199101015840 1199111015840) can be denoted based on thenew location of SAI
The constraint equations of constant distances can bewritten as
Δ119909 119910 119911 = (119909 119910 119911) minus (1199091015840 1199101015840 1199111015840)
119897 = radic(Δ119909)2 + (Δ119910)2 + (Δ119911)2(2)
Mathematical Problems in Engineering 3
Table 1 Original design variables of hardpoint positions in front suspension system (mm)
Axis 119874 119860 119861 119862 119863 119864 119865 119866 119867119909 0 minus1466 minus102 1263 minus1466 1263 78 minus700 0119910 0 1962 5712 1962 2615 5552 2615 5712 622119911 0 minus1343 minus1293 minus1343 757 995 757 minus100 0
The new locations of upper spherical joints connectingthe steering knuckle can be expressed by
119897119864119861 = 1198971015840119864119861
119897119864119865 = 1198971015840119864119865
119897119864119863 = 1198971015840119864119863
(3)
Similarly the new positions 119866 and 119867 can be provided by
119897119864119866 = 1198971015840119864119866
119897119868119866 = 1198971015840119868119866
119897119861119866 = 1198971015840119861119866
119897119864119867 = 1198971015840119864119867
119897119861119867 = 1198971015840119861119867119897119866119867 = 1198971015840119866119867
(4)
Constraint equations are solved for the correspondinglocations of the lower and upper control arms using MAT-LAB
To describe the three-dimensional kinematic model forsuspension characteristics and wheel movements the orig-inal hardpoint positions in the front-right LSA suspensionsystem are listed in Table 1
23 Dynamic Responses The front LSA suspension is mod-elled using ADAMS as a multibody simulation tool [17] Thesuspension consists of a Panhard bar to withstand the tireprincipal lateral force an upper control arm and a lowercontrol arm which are subject to decomposing longitudinaldriving braking and vertical forces The steering systemcomprises a steering wheel a steering column pitman armrack and pinion gearbox as indicated in Figure 2 Thedistribution coefficient of the total weight can be optimizedby adjusting mount positions and spring perches of controlarms
To compare the effects of different coordinate values ofhardpoints the dynamic responses of the LSA suspension aredeveloped to evaluate the relationship between ride comfortand handling for specifying spring stiffness and damper rateunder road load conditions The dynamics ADAMS modelthat is integrated with steering system and suspension systemexpressed as boundary conditions are developed to comparethe performances of current designs
In static analysis the wheel travel of LSA suspensionis updated with a range from minus30mm to 30mm to reflect
Figure 2 Simulationmodel of front suspension system and steeringmechanism
Wheel travel (mm)403020100minus10minus20minus30minus40
1230
1230
1231
1232
1232
1232
1233
Fron
t tre
ad (m
m)
Figure 3 Variations of wheel travel related to front tire tread
the changes of tread curve as illustrated in Figure 3 Wheeltravel measures use the following convention positive valuesindicate compressionmotion whereas negative displacementrepresents extension process The simulation results revealsignificant effect of wheel travel on tire tread The largerthe wheel travel along with up or down direction variesthe higher the change rate the tire tread generates is Theproposed positions of tie rod joint and length of steeringpitman arm as important structural parameters distinguishthe front suspension from the rear one considering spatialconstraints and attribute constraints
24 Sensitivity Analysis The INSIGHT module fromADAMS finds the parameter sensitivity analyses thatminimize the effects of road excitation or other disturbancesupon the tires movement while satisfying the constraints onthe double-wishbone type suspension geometry constraintsThe suspension compliances are specified by variancefunctions that aim to describe the influence of the
4 Mathematical Problems in Engineering
Table 2 Sensitivity analysis of design variables
Hardpoints Toe Camber SAI Caster119910119860(1199091) minus107 001 002 0119911119860(1199092) minus342 177 135 minus116119910119862(1199093) minus108 001 001 001119911119862(1199094) minus296 1741 1365 068119910119863(1199095) minus026 minus156 minus161 042119911119863(1199096) minus068 minus1651 minus1684 101119910119865(1199097) minus022 minus152 minus161 minus037119911119865(1199098) minus028 minus161 minus1707 minus197119910119866(1199099) minus132 minus001 0 0119911119866(11990910) 826 minus76 015 015
coordinates of hardpoints during operations The wheelgeometry parameters that affect the steerability of the vehicleare camber caster SAI and toe
The sensitivity results of wheel geometry parameterscan be calculated as the steering effort and steering wheelreturnability produced by the tires to predict the behaviorsof vehicle as shown in Table 2 The negative caster anglescan reduce the steering effort but weaken the steering wheelreturnability Smaller SAI angles can be favourable to steeringeffort but deteriorate the steering wheel returnability as wellFor that purpose optimal approaches of design parameterschanges used to require trade-offs to retain mutual balanceThe sensitivity characteristics of different wheel alignmentparameters are strongly correlated with hardpoint positionsof control arms in the suspension system
In Table 2 the different contributing levels of eachhardpoint position have been revealed to their effects onthe variations of wheel alignments The SAI angle is mainlydependent on the vertical locations of 119860 119862 119885 and 119865 pointsthe toe angle depends on the vertical locations of 119860 119862and 119866 points The vertical locations of 119860 119864 and 119865 pointsas the design important parameters have a significant effecton camber angle on steering response The data analysis ofTable 2 allows us to explore potential of optimization of thelocations of critical hardpoints with multiobjective functionand geometry constraints
3 Optimization and Simulation
31 GA Optimization Method Genetic Algorithms as opti-mization techniques using powerful and global search meth-ods imitate the processes present in natural evolution basedon Darwinianrsquos survival of the best fitness theory [18ndash21]Three coral and repeating stages mainly consist of selectioncrossover andmutationTherefore the biological individualscontained in design variables as a population can be con-verted into one long informative string It is a convenient wayto regard binary segments encoding the optimal parametersas a chromosome The convergence of population membersis checked and updated at each time step after the evaluationof fitness The fitness functions are considered within 4 forall population members to guide next steps towards optimaldesign solutions The best member of the current population
Start
Initialize population
Gen = 1
Evaluate population
Converged
Gen = Gen + 1
Gen = Max
End
Selection
Crossover
Mutation
No
Yes
Figure 4 Flow chart of GA optimization process
is alive and gains higher probability of reproduction whichwill form a new offspring It is the best solution that improvesindividual genetic characteristics generation until the optimalfitness set is obtained
In the selection part multiple population members arechosen at random conditions to produce the best one basedon their fitness functions The hypothetical individuals withhigher fitness are reproduced by processes of crossoverand mutation to generate the new offspring Repetitionof the processes brings about evolutionary population thatstrengthens their fitness function After selecting one outof three members the process repeats until the number ofselected members matches the population size Then themating mechanism manipulates the genomes of the parentbased on crossover stage Firstly the two selected memberscreate two members of the new population Then twomembers are added to create the next generation under adefined crossover limit Since the crossover operation thealgorithm of mutation allows for the possibility that somealternatives of the available population in the initial randomlycan be represented within a mutation limit set The mutationrate uses 1 in the GA arithmetic process as shown inFigure 4
The procedure of the generic multiobjective GA is givenas follows
Step 1 Generate a random initialized population
Step 2 For each objective Gen Gen = 1 2 119896 generate arandom number and weight for each objective
Step 3 Evaluate the fitness of the solution in the sortedpopulation and calculate the selection probability of eachsolution
Mathematical Problems in Engineering 5
Table 3 Comparison between original and optimized parameters of the LSA suspension mm
Design variables 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863 119910119865 119911119865 119910119866 119911119866Original 1962 minus1343 1962 minus1343 2615 757 2615 757 5742 minus80Optimized 2052 1293 2052 1293 2605 747 2605 747 5752 minus75
Step 4 Select parents using the selection probabilities inStep 3
Step 5 Apply the crossover on the selected parent pairs tocreate new offspring
Step 6 Mutate the offspring created in Step 5 with a pre-specified mutation rate and put all the offspring into the newpopulation
Step 7 If the stopping condition (Gen =Max) is not satisfiedset Gen = Gen + 1 and go to Step 3 Otherwise end theprocedure
32 GA Optimizing Suspension Model The aim is to find theoptimal coordinates of hardpoints which are the key locationsto influence on suspension characteristics according to theirrelative orientations The design procedure accomplishesa suitable compromise between resolution accuracy andcomputational speed In order to investigate the effect ofgeometry changes on suspension displacement limited to itsfree travel the vertical and lateral direction of five hardpoints(119860 119862119863 119865 and119866) are selected as optimization variables andencoded into a binary string with fixed length
The length of whole chromosome string has eight bitsin GA optimization solution process because eight bits cor-respond to each value of parameter 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863119910119865 119911119865 119910119866 and 119911119866 respectively
For example 1198781 represents 00100100 which means thecorresponding decimal values given as
119910119860 = 119883119910119860min +119889119910119860
28 minus 1 (119883119910119860min minus 119883119910119860max) (5)
where 119883119910119860min and 119883119910119860max are the limit range for the coordi-nates of hardpoint 119910119860 and 119889119910119860 represents the binary value for1198781
The aim of the optimization work is to minimize thesum of dynamic changes of wheel alignments The designvariations of hardpoint positions could be performed forgeometry constrains and multiobjective optimizations
After the preceding analysis a GA optimization pro-gram is compiled and verified via implementation of virtualsimulations The block diagram representation of the GAoperation process is given in Figure 5with the aimof reachingminimum error To correspond with the actual demandfor the variation ranges in the wheel alignments and LASsuspension system the corresponding original and optimizedvalues of hardpoint positions are shown in Table 3
33 Performance Analysis with Time Delay When the con-straints in multiobjective optimizations are activated the
LSA suspensionstructure
Hardpoints
Characteristic
Modelling
Kinematostatic
Sensitivity
Analysis
Optimization
Output results
Evaluate fitness
Convergence Selection
Crossover
Mutation
Convert chromosomes
No
Yes
Figure 5 Block diagram of GA optimization program
suspension system parameters such as spring constant anddamping coefficient need to reconsider the effect of timedelay on dynamic behavior due to the distance of front andrear axles (wheelbase) and different velocity
The dynamic behavior can be correctly simulated bytaking into account the value of time delay caused by the roadexcitations at the front and rear axles
119902119891 (119905) = 119902119903 (119905 + 120591) (6)
where 119902119891(119905) and 119902119903(119905) are displacement excitations at frontand rear axles respectively and 120591 means time delay whichcan be calculated as follows
120591 = (119886 + 119887)V
(7)
where 119886 and 119887 are the distance of mass center from front andrear axle separately and V represents vehicle speed
The parameters of vehicle are summarized in Table 4The white noise disturbance that generates normally
distributed random numbers such as a sequence feeds theinput of nonlinear time delay model with the following set ofparameters noise power (the road roughness coefficient) 119875 =256 times 10minus6 and sample time 119879119890 = 001 s
For the value of time delay corresponding velocity ofvehicle is computed by (7) Vℎ = 80 kmh indicates 1205911 =
6 Mathematical Problems in Engineering
Table 4 Specification of the selected suspension system
119898119904 kg 119898119906 kg 119896119904 Nm 119896119905 Nm 119862119904 Nsm 119886 m 119887 m240 36 16000 160000 1400 12 13
Front suspensionRear suspension t1Rear suspension t2
04 06 08 1 12 14 16 1802
Time (sec)
minus5
0
5
10
Body
acce
lera
tion
(ms
e=2)
Figure 6 Time history of the body accelerationwith different valuesof time delay
01125 s and V119897 = 40 kmh means 1205912 = 0225 s Theeffects of different time delay are shown in Figure 6 Thetime delay is not a constant but varies with the vehiclespeed and the road roughness coefficient The variation offrequency characteristic is activated to diminish time delaythat is followed by increasing vehicle speed It is obvious thatvehicle body acceleration increases with time delay whichdeteriorates ride comfort of the driver
The frequency response analyses from the road dis-placement to the body vertical acceleration and suspensiondistortion are obtained by high vehicle speed and low vehiclespeed as in Figures 7 and 8
At low frequency suspension provides a satisfied damp-ing of the body vertical acceleration but a bad filter of midand high frequencies On the other hand a high time delayensures a good filtering but a badly damped body verticalacceleration
34 Simulation and Experiment To correspond with thekinematics simulation analysis the double-wishbone typesuspension is designed with understeer characteristics Thesimulation and experimental curves are illustrated in com-parison with original and optimization toe and camber of thefront suspension travel in Figures 9 and 10
The camber angle decreases from 1152∘ to 105∘ and toe-inangle reduces from 1036∘ to 0944∘Thenonlinear suspensionsystem with different values of time delay is investigatedby numerical simulation The travel displacements fromminus30mm to 30mm are utilized on front-right suspensionIn Figure 9 it has been proved that the typical toe-outcharacteristics with a negative camber angle are beneficialto maintain the track path The toe angle has a tendency
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus1
100
101
102
103
Body
acce
lera
tion
road
disp
lace
men
t (dB
)
Figure 7 Frequency responses road displacement to body verticalacceleration
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus2
10minus1
100
101
Susp
ensio
n di
stort
ion
road
disp
lace
men
t (dB
)
Figure 8 Frequency responses road displacement to suspensiondistortion
with relatively small variation which improves the steeringresponse and road feeling at different suspension travelsAs shown in Figure 10 the comparison with camber angleof original and optimization coordinates is obtained withthe tire bouncing from the lowest position to the highestposition The two curves of camber angle are fitted wellexcept for two ends of the suspension travel The negative
Mathematical Problems in Engineering 7
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus08
minus06
minus04
minus02
0
02
04
Toe a
ngle
(deg
)
Figure 9 Block diagram of GA operation on LSA suspension andsteering mechanism
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus18
minus16
minus14
minus12
minus1
minus08
minus06
minus04
Cam
ber a
ngle
(deg
)
Figure 10 Block diagram of GA operation on LSA suspension andsteering mechanism
camber angle is the biggest contributor to keeping the vehicleon its straight-line path At the compression and extensionprocesses of suspension motion the curves clearly indicatethe hysteresis characteristic model of suspension with theoptimization coordinates of hardpoint Also there are moredesirable characteristics for vehicle driving steerability thanbefore
The kinematics and compliance (KampC) facility is con-structed with optical autocollimator sensors that are usedto measure the toe and camber angle amplifiers and dataacquisition systems to record the values in the whole testcourse The test bench mainly consists of six hydraulicactuators to generate longitudinal lateral and vertical forceson two wheels with one axle as shown in Figure 11 Becauseof the compliance steer forces elastic bushing elements and
Figure 11 Kinematics and compliance test bench
motions between the tire and road surface in the simulationare different from the real test bench The influence of wheeltravels on front suspension is taken into account which isessential for performing the experiment of actual workingsituations The similarity of both simulation and testingcurves is in very good agreement with the extremes of wheel
4 Conclusions
By using multibody simulation tool the double-wishbonetype suspension (LSA) system has been built up for mea-suring values of the geometry and kinematic qualities Thesensitivity analysis process has been derived from a nonlinearcomputer model in order to optimize the principal designvariables of main hardpoints Consequently the suspensionmodel was simulated under certain driving conditions withoptimized values and different values of time delay The GAoptimal solutions have been tested andmodification of coeffi-cients was repeated for the elastic elements such as the springstiffness and damper It is necessary that the computer modeland prototype have been obtained to validate effectivenessof the proposed method The simulation and computationalprocedure can be applied to design an optimization problemof any other kind of suspension systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this manuscript
Acknowledgments
This research work was supported by International Science ampTechnology Cooperation Program of China (2013DFA31920)the National Key Research and Development Program ofChina (2017YFD0401304) and the National Natural ScienceFoundation of China (Grant no 51476143)
References
[1] M Heidari and H Homaei ldquoDesign a PID controller for sus-pension system by back propagation neural networkrdquo Journalof Engineering vol 2013 Article ID 421543 pp 1ndash9 2013
8 Mathematical Problems in Engineering
[2] C Tan R Xu Z Wang L Si and X Liu ldquoAn improvedgenetic fuzzy logic control method to reduce the enlargementof coal floor deformation in shearer memory cutting processrdquoComputational Intelligence and Neuroscience vol 2016 ArticleID 3973627 pp 1ndash14 2016
[3] D Ozcan U Sonmez and L Guvenc ldquoOptimisation of thenonlinear suspension characteristics of a light commercialvehiclerdquo International Journal of Vehicular Technology vol 2013Article ID 562424 pp 1ndash16 2013
[4] A Seifi R Hassannejad and M A Hamed ldquoUse of nonlinearasymmetrical shock absorbers in multi-objective optimizationof the suspension system in a variety of road excitationsrdquoProceedings of the Institution of Mechanical Engineers Part KJournal of Multi-body Dynamics vol 231 no 2 pp 372ndash3872017
[5] V Savsani V Patel B Gadhvi and M Tawhid ldquoPareto opti-mization of a half car passive suspension model using a novelmultiobjective heat transfer search algorithmrdquo Modelling andSimulation in Engineering vol 2017 Article ID 2034907 pp 1ndash172017
[6] V Mehta M Patel Y Gandhi and B Gadhvi ldquoAn experimentalapproach of estimating speed bump profile to optimizing thesuspension parameters using TLBOrdquo Journal of Advances inVehicle Engineering vol 2 no 2 pp 65ndash74 2016
[7] A Jamali H Shams and M Fasihozaman ldquoPareto multi-objective optimum design of vehicle-suspension system underrandom road excitationsrdquo Proceedings of the Institution ofMechanical Engineers Part K Journal of Multi-body Dynamicsvol 228 no 3 pp 282ndash293 2014
[8] T Tak S Chung and H Chun ldquoAn optimal design softwarefor vehicle suspension systemsrdquo SAE Technical Papers 2000-01-1618 2000
[9] K-H Suh Y-K Lee and H-M Jeong ldquoA study on thehandling performances of a large-sized bus with the change ofrear suspension geometryrdquo SAE Technical Papers 2002-01-30712002
[10] J Park J Yi and D Lee ldquoInvestigation into suspensiondynamic compliance characteristics using direct measurementand simulationrdquo SAE Technical Papers 2004-01-1065 2004
[11] H-S Kim W-J Do J-S Shim and S-R Choi ldquoThe stabilityanalysis of steering and suspension parameters on hands freemotionrdquo SAE Technical Papers 2002-01-0620 2002
[12] S A Mitchell S Smith A Damiano J Durgavich and RMacCracken ldquoUse of genetic algorithms with multiple metricsaimed at the optimization of automotive suspension systemsrdquoSAE Technical Papers 2004-01-3520 2004
[13] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[14] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash3682016
[15] A C Mitra G J Desai S R Patwardhan P H Shirke W MH Kurne and N Banerjee ldquoOptimization of passive vehiclesuspension system by genetic algorithmrdquo Procedia Engineeringvol 144 pp 1158ndash1166 2016
[16] J Yan Z Yin X Guo and C Fu ldquoFuzzy control of semi-active air suspension for cab based on genetic algorithmsrdquo SAETechnical Papers 2008-01-2681 2008
[17] S Hasagasioglu K Kilicaslan O Atabay and A Guney ldquoVehi-cle dynamics analysis of a heavy-duty commercial vehicle byusingmultibody simulationmethodsrdquoTheInternational Journalof AdvancedManufacturing Technology vol 60 no 5-8 pp 825ndash839 2012
[18] K Abdullah W C David and E S Alice ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[19] N Srinivas and K Deb ldquoMultiobjective optimization usingnon-dominated sorting in genetic algorithmsrdquo EvolutionaryComputation vol 2 no 3 pp 221ndash248 1995
[20] R Darvishi M N Esfahany and R Bagheri ldquoNumerical studyon increasing PVC suspension polymerization productivity byusing PSO optimization algorithmrdquo International Journal ofPlastics Technology vol 20 no 2 pp 219ndash230 2016
[21] J Wu Z Luo Y Zhang and N Zhang ldquoAn interval uncertainoptimization method for vehicle suspensions using Chebyshevmetamodelsrdquo Applied Mathematical Modelling vol 38 no 15-16 pp 3706ndash3723 2014
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 3
Table 1 Original design variables of hardpoint positions in front suspension system (mm)
Axis 119874 119860 119861 119862 119863 119864 119865 119866 119867119909 0 minus1466 minus102 1263 minus1466 1263 78 minus700 0119910 0 1962 5712 1962 2615 5552 2615 5712 622119911 0 minus1343 minus1293 minus1343 757 995 757 minus100 0
The new locations of upper spherical joints connectingthe steering knuckle can be expressed by
119897119864119861 = 1198971015840119864119861
119897119864119865 = 1198971015840119864119865
119897119864119863 = 1198971015840119864119863
(3)
Similarly the new positions 119866 and 119867 can be provided by
119897119864119866 = 1198971015840119864119866
119897119868119866 = 1198971015840119868119866
119897119861119866 = 1198971015840119861119866
119897119864119867 = 1198971015840119864119867
119897119861119867 = 1198971015840119861119867119897119866119867 = 1198971015840119866119867
(4)
Constraint equations are solved for the correspondinglocations of the lower and upper control arms using MAT-LAB
To describe the three-dimensional kinematic model forsuspension characteristics and wheel movements the orig-inal hardpoint positions in the front-right LSA suspensionsystem are listed in Table 1
23 Dynamic Responses The front LSA suspension is mod-elled using ADAMS as a multibody simulation tool [17] Thesuspension consists of a Panhard bar to withstand the tireprincipal lateral force an upper control arm and a lowercontrol arm which are subject to decomposing longitudinaldriving braking and vertical forces The steering systemcomprises a steering wheel a steering column pitman armrack and pinion gearbox as indicated in Figure 2 Thedistribution coefficient of the total weight can be optimizedby adjusting mount positions and spring perches of controlarms
To compare the effects of different coordinate values ofhardpoints the dynamic responses of the LSA suspension aredeveloped to evaluate the relationship between ride comfortand handling for specifying spring stiffness and damper rateunder road load conditions The dynamics ADAMS modelthat is integrated with steering system and suspension systemexpressed as boundary conditions are developed to comparethe performances of current designs
In static analysis the wheel travel of LSA suspensionis updated with a range from minus30mm to 30mm to reflect
Figure 2 Simulationmodel of front suspension system and steeringmechanism
Wheel travel (mm)403020100minus10minus20minus30minus40
1230
1230
1231
1232
1232
1232
1233
Fron
t tre
ad (m
m)
Figure 3 Variations of wheel travel related to front tire tread
the changes of tread curve as illustrated in Figure 3 Wheeltravel measures use the following convention positive valuesindicate compressionmotion whereas negative displacementrepresents extension process The simulation results revealsignificant effect of wheel travel on tire tread The largerthe wheel travel along with up or down direction variesthe higher the change rate the tire tread generates is Theproposed positions of tie rod joint and length of steeringpitman arm as important structural parameters distinguishthe front suspension from the rear one considering spatialconstraints and attribute constraints
24 Sensitivity Analysis The INSIGHT module fromADAMS finds the parameter sensitivity analyses thatminimize the effects of road excitation or other disturbancesupon the tires movement while satisfying the constraints onthe double-wishbone type suspension geometry constraintsThe suspension compliances are specified by variancefunctions that aim to describe the influence of the
4 Mathematical Problems in Engineering
Table 2 Sensitivity analysis of design variables
Hardpoints Toe Camber SAI Caster119910119860(1199091) minus107 001 002 0119911119860(1199092) minus342 177 135 minus116119910119862(1199093) minus108 001 001 001119911119862(1199094) minus296 1741 1365 068119910119863(1199095) minus026 minus156 minus161 042119911119863(1199096) minus068 minus1651 minus1684 101119910119865(1199097) minus022 minus152 minus161 minus037119911119865(1199098) minus028 minus161 minus1707 minus197119910119866(1199099) minus132 minus001 0 0119911119866(11990910) 826 minus76 015 015
coordinates of hardpoints during operations The wheelgeometry parameters that affect the steerability of the vehicleare camber caster SAI and toe
The sensitivity results of wheel geometry parameterscan be calculated as the steering effort and steering wheelreturnability produced by the tires to predict the behaviorsof vehicle as shown in Table 2 The negative caster anglescan reduce the steering effort but weaken the steering wheelreturnability Smaller SAI angles can be favourable to steeringeffort but deteriorate the steering wheel returnability as wellFor that purpose optimal approaches of design parameterschanges used to require trade-offs to retain mutual balanceThe sensitivity characteristics of different wheel alignmentparameters are strongly correlated with hardpoint positionsof control arms in the suspension system
In Table 2 the different contributing levels of eachhardpoint position have been revealed to their effects onthe variations of wheel alignments The SAI angle is mainlydependent on the vertical locations of 119860 119862 119885 and 119865 pointsthe toe angle depends on the vertical locations of 119860 119862and 119866 points The vertical locations of 119860 119864 and 119865 pointsas the design important parameters have a significant effecton camber angle on steering response The data analysis ofTable 2 allows us to explore potential of optimization of thelocations of critical hardpoints with multiobjective functionand geometry constraints
3 Optimization and Simulation
31 GA Optimization Method Genetic Algorithms as opti-mization techniques using powerful and global search meth-ods imitate the processes present in natural evolution basedon Darwinianrsquos survival of the best fitness theory [18ndash21]Three coral and repeating stages mainly consist of selectioncrossover andmutationTherefore the biological individualscontained in design variables as a population can be con-verted into one long informative string It is a convenient wayto regard binary segments encoding the optimal parametersas a chromosome The convergence of population membersis checked and updated at each time step after the evaluationof fitness The fitness functions are considered within 4 forall population members to guide next steps towards optimaldesign solutions The best member of the current population
Start
Initialize population
Gen = 1
Evaluate population
Converged
Gen = Gen + 1
Gen = Max
End
Selection
Crossover
Mutation
No
Yes
Figure 4 Flow chart of GA optimization process
is alive and gains higher probability of reproduction whichwill form a new offspring It is the best solution that improvesindividual genetic characteristics generation until the optimalfitness set is obtained
In the selection part multiple population members arechosen at random conditions to produce the best one basedon their fitness functions The hypothetical individuals withhigher fitness are reproduced by processes of crossoverand mutation to generate the new offspring Repetitionof the processes brings about evolutionary population thatstrengthens their fitness function After selecting one outof three members the process repeats until the number ofselected members matches the population size Then themating mechanism manipulates the genomes of the parentbased on crossover stage Firstly the two selected memberscreate two members of the new population Then twomembers are added to create the next generation under adefined crossover limit Since the crossover operation thealgorithm of mutation allows for the possibility that somealternatives of the available population in the initial randomlycan be represented within a mutation limit set The mutationrate uses 1 in the GA arithmetic process as shown inFigure 4
The procedure of the generic multiobjective GA is givenas follows
Step 1 Generate a random initialized population
Step 2 For each objective Gen Gen = 1 2 119896 generate arandom number and weight for each objective
Step 3 Evaluate the fitness of the solution in the sortedpopulation and calculate the selection probability of eachsolution
Mathematical Problems in Engineering 5
Table 3 Comparison between original and optimized parameters of the LSA suspension mm
Design variables 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863 119910119865 119911119865 119910119866 119911119866Original 1962 minus1343 1962 minus1343 2615 757 2615 757 5742 minus80Optimized 2052 1293 2052 1293 2605 747 2605 747 5752 minus75
Step 4 Select parents using the selection probabilities inStep 3
Step 5 Apply the crossover on the selected parent pairs tocreate new offspring
Step 6 Mutate the offspring created in Step 5 with a pre-specified mutation rate and put all the offspring into the newpopulation
Step 7 If the stopping condition (Gen =Max) is not satisfiedset Gen = Gen + 1 and go to Step 3 Otherwise end theprocedure
32 GA Optimizing Suspension Model The aim is to find theoptimal coordinates of hardpoints which are the key locationsto influence on suspension characteristics according to theirrelative orientations The design procedure accomplishesa suitable compromise between resolution accuracy andcomputational speed In order to investigate the effect ofgeometry changes on suspension displacement limited to itsfree travel the vertical and lateral direction of five hardpoints(119860 119862119863 119865 and119866) are selected as optimization variables andencoded into a binary string with fixed length
The length of whole chromosome string has eight bitsin GA optimization solution process because eight bits cor-respond to each value of parameter 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863119910119865 119911119865 119910119866 and 119911119866 respectively
For example 1198781 represents 00100100 which means thecorresponding decimal values given as
119910119860 = 119883119910119860min +119889119910119860
28 minus 1 (119883119910119860min minus 119883119910119860max) (5)
where 119883119910119860min and 119883119910119860max are the limit range for the coordi-nates of hardpoint 119910119860 and 119889119910119860 represents the binary value for1198781
The aim of the optimization work is to minimize thesum of dynamic changes of wheel alignments The designvariations of hardpoint positions could be performed forgeometry constrains and multiobjective optimizations
After the preceding analysis a GA optimization pro-gram is compiled and verified via implementation of virtualsimulations The block diagram representation of the GAoperation process is given in Figure 5with the aimof reachingminimum error To correspond with the actual demandfor the variation ranges in the wheel alignments and LASsuspension system the corresponding original and optimizedvalues of hardpoint positions are shown in Table 3
33 Performance Analysis with Time Delay When the con-straints in multiobjective optimizations are activated the
LSA suspensionstructure
Hardpoints
Characteristic
Modelling
Kinematostatic
Sensitivity
Analysis
Optimization
Output results
Evaluate fitness
Convergence Selection
Crossover
Mutation
Convert chromosomes
No
Yes
Figure 5 Block diagram of GA optimization program
suspension system parameters such as spring constant anddamping coefficient need to reconsider the effect of timedelay on dynamic behavior due to the distance of front andrear axles (wheelbase) and different velocity
The dynamic behavior can be correctly simulated bytaking into account the value of time delay caused by the roadexcitations at the front and rear axles
119902119891 (119905) = 119902119903 (119905 + 120591) (6)
where 119902119891(119905) and 119902119903(119905) are displacement excitations at frontand rear axles respectively and 120591 means time delay whichcan be calculated as follows
120591 = (119886 + 119887)V
(7)
where 119886 and 119887 are the distance of mass center from front andrear axle separately and V represents vehicle speed
The parameters of vehicle are summarized in Table 4The white noise disturbance that generates normally
distributed random numbers such as a sequence feeds theinput of nonlinear time delay model with the following set ofparameters noise power (the road roughness coefficient) 119875 =256 times 10minus6 and sample time 119879119890 = 001 s
For the value of time delay corresponding velocity ofvehicle is computed by (7) Vℎ = 80 kmh indicates 1205911 =
6 Mathematical Problems in Engineering
Table 4 Specification of the selected suspension system
119898119904 kg 119898119906 kg 119896119904 Nm 119896119905 Nm 119862119904 Nsm 119886 m 119887 m240 36 16000 160000 1400 12 13
Front suspensionRear suspension t1Rear suspension t2
04 06 08 1 12 14 16 1802
Time (sec)
minus5
0
5
10
Body
acce
lera
tion
(ms
e=2)
Figure 6 Time history of the body accelerationwith different valuesof time delay
01125 s and V119897 = 40 kmh means 1205912 = 0225 s Theeffects of different time delay are shown in Figure 6 Thetime delay is not a constant but varies with the vehiclespeed and the road roughness coefficient The variation offrequency characteristic is activated to diminish time delaythat is followed by increasing vehicle speed It is obvious thatvehicle body acceleration increases with time delay whichdeteriorates ride comfort of the driver
The frequency response analyses from the road dis-placement to the body vertical acceleration and suspensiondistortion are obtained by high vehicle speed and low vehiclespeed as in Figures 7 and 8
At low frequency suspension provides a satisfied damp-ing of the body vertical acceleration but a bad filter of midand high frequencies On the other hand a high time delayensures a good filtering but a badly damped body verticalacceleration
34 Simulation and Experiment To correspond with thekinematics simulation analysis the double-wishbone typesuspension is designed with understeer characteristics Thesimulation and experimental curves are illustrated in com-parison with original and optimization toe and camber of thefront suspension travel in Figures 9 and 10
The camber angle decreases from 1152∘ to 105∘ and toe-inangle reduces from 1036∘ to 0944∘Thenonlinear suspensionsystem with different values of time delay is investigatedby numerical simulation The travel displacements fromminus30mm to 30mm are utilized on front-right suspensionIn Figure 9 it has been proved that the typical toe-outcharacteristics with a negative camber angle are beneficialto maintain the track path The toe angle has a tendency
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus1
100
101
102
103
Body
acce
lera
tion
road
disp
lace
men
t (dB
)
Figure 7 Frequency responses road displacement to body verticalacceleration
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus2
10minus1
100
101
Susp
ensio
n di
stort
ion
road
disp
lace
men
t (dB
)
Figure 8 Frequency responses road displacement to suspensiondistortion
with relatively small variation which improves the steeringresponse and road feeling at different suspension travelsAs shown in Figure 10 the comparison with camber angleof original and optimization coordinates is obtained withthe tire bouncing from the lowest position to the highestposition The two curves of camber angle are fitted wellexcept for two ends of the suspension travel The negative
Mathematical Problems in Engineering 7
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus08
minus06
minus04
minus02
0
02
04
Toe a
ngle
(deg
)
Figure 9 Block diagram of GA operation on LSA suspension andsteering mechanism
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus18
minus16
minus14
minus12
minus1
minus08
minus06
minus04
Cam
ber a
ngle
(deg
)
Figure 10 Block diagram of GA operation on LSA suspension andsteering mechanism
camber angle is the biggest contributor to keeping the vehicleon its straight-line path At the compression and extensionprocesses of suspension motion the curves clearly indicatethe hysteresis characteristic model of suspension with theoptimization coordinates of hardpoint Also there are moredesirable characteristics for vehicle driving steerability thanbefore
The kinematics and compliance (KampC) facility is con-structed with optical autocollimator sensors that are usedto measure the toe and camber angle amplifiers and dataacquisition systems to record the values in the whole testcourse The test bench mainly consists of six hydraulicactuators to generate longitudinal lateral and vertical forceson two wheels with one axle as shown in Figure 11 Becauseof the compliance steer forces elastic bushing elements and
Figure 11 Kinematics and compliance test bench
motions between the tire and road surface in the simulationare different from the real test bench The influence of wheeltravels on front suspension is taken into account which isessential for performing the experiment of actual workingsituations The similarity of both simulation and testingcurves is in very good agreement with the extremes of wheel
4 Conclusions
By using multibody simulation tool the double-wishbonetype suspension (LSA) system has been built up for mea-suring values of the geometry and kinematic qualities Thesensitivity analysis process has been derived from a nonlinearcomputer model in order to optimize the principal designvariables of main hardpoints Consequently the suspensionmodel was simulated under certain driving conditions withoptimized values and different values of time delay The GAoptimal solutions have been tested andmodification of coeffi-cients was repeated for the elastic elements such as the springstiffness and damper It is necessary that the computer modeland prototype have been obtained to validate effectivenessof the proposed method The simulation and computationalprocedure can be applied to design an optimization problemof any other kind of suspension systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this manuscript
Acknowledgments
This research work was supported by International Science ampTechnology Cooperation Program of China (2013DFA31920)the National Key Research and Development Program ofChina (2017YFD0401304) and the National Natural ScienceFoundation of China (Grant no 51476143)
References
[1] M Heidari and H Homaei ldquoDesign a PID controller for sus-pension system by back propagation neural networkrdquo Journalof Engineering vol 2013 Article ID 421543 pp 1ndash9 2013
8 Mathematical Problems in Engineering
[2] C Tan R Xu Z Wang L Si and X Liu ldquoAn improvedgenetic fuzzy logic control method to reduce the enlargementof coal floor deformation in shearer memory cutting processrdquoComputational Intelligence and Neuroscience vol 2016 ArticleID 3973627 pp 1ndash14 2016
[3] D Ozcan U Sonmez and L Guvenc ldquoOptimisation of thenonlinear suspension characteristics of a light commercialvehiclerdquo International Journal of Vehicular Technology vol 2013Article ID 562424 pp 1ndash16 2013
[4] A Seifi R Hassannejad and M A Hamed ldquoUse of nonlinearasymmetrical shock absorbers in multi-objective optimizationof the suspension system in a variety of road excitationsrdquoProceedings of the Institution of Mechanical Engineers Part KJournal of Multi-body Dynamics vol 231 no 2 pp 372ndash3872017
[5] V Savsani V Patel B Gadhvi and M Tawhid ldquoPareto opti-mization of a half car passive suspension model using a novelmultiobjective heat transfer search algorithmrdquo Modelling andSimulation in Engineering vol 2017 Article ID 2034907 pp 1ndash172017
[6] V Mehta M Patel Y Gandhi and B Gadhvi ldquoAn experimentalapproach of estimating speed bump profile to optimizing thesuspension parameters using TLBOrdquo Journal of Advances inVehicle Engineering vol 2 no 2 pp 65ndash74 2016
[7] A Jamali H Shams and M Fasihozaman ldquoPareto multi-objective optimum design of vehicle-suspension system underrandom road excitationsrdquo Proceedings of the Institution ofMechanical Engineers Part K Journal of Multi-body Dynamicsvol 228 no 3 pp 282ndash293 2014
[8] T Tak S Chung and H Chun ldquoAn optimal design softwarefor vehicle suspension systemsrdquo SAE Technical Papers 2000-01-1618 2000
[9] K-H Suh Y-K Lee and H-M Jeong ldquoA study on thehandling performances of a large-sized bus with the change ofrear suspension geometryrdquo SAE Technical Papers 2002-01-30712002
[10] J Park J Yi and D Lee ldquoInvestigation into suspensiondynamic compliance characteristics using direct measurementand simulationrdquo SAE Technical Papers 2004-01-1065 2004
[11] H-S Kim W-J Do J-S Shim and S-R Choi ldquoThe stabilityanalysis of steering and suspension parameters on hands freemotionrdquo SAE Technical Papers 2002-01-0620 2002
[12] S A Mitchell S Smith A Damiano J Durgavich and RMacCracken ldquoUse of genetic algorithms with multiple metricsaimed at the optimization of automotive suspension systemsrdquoSAE Technical Papers 2004-01-3520 2004
[13] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[14] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash3682016
[15] A C Mitra G J Desai S R Patwardhan P H Shirke W MH Kurne and N Banerjee ldquoOptimization of passive vehiclesuspension system by genetic algorithmrdquo Procedia Engineeringvol 144 pp 1158ndash1166 2016
[16] J Yan Z Yin X Guo and C Fu ldquoFuzzy control of semi-active air suspension for cab based on genetic algorithmsrdquo SAETechnical Papers 2008-01-2681 2008
[17] S Hasagasioglu K Kilicaslan O Atabay and A Guney ldquoVehi-cle dynamics analysis of a heavy-duty commercial vehicle byusingmultibody simulationmethodsrdquoTheInternational Journalof AdvancedManufacturing Technology vol 60 no 5-8 pp 825ndash839 2012
[18] K Abdullah W C David and E S Alice ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[19] N Srinivas and K Deb ldquoMultiobjective optimization usingnon-dominated sorting in genetic algorithmsrdquo EvolutionaryComputation vol 2 no 3 pp 221ndash248 1995
[20] R Darvishi M N Esfahany and R Bagheri ldquoNumerical studyon increasing PVC suspension polymerization productivity byusing PSO optimization algorithmrdquo International Journal ofPlastics Technology vol 20 no 2 pp 219ndash230 2016
[21] J Wu Z Luo Y Zhang and N Zhang ldquoAn interval uncertainoptimization method for vehicle suspensions using Chebyshevmetamodelsrdquo Applied Mathematical Modelling vol 38 no 15-16 pp 3706ndash3723 2014
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Mathematical Problems in Engineering
Table 2 Sensitivity analysis of design variables
Hardpoints Toe Camber SAI Caster119910119860(1199091) minus107 001 002 0119911119860(1199092) minus342 177 135 minus116119910119862(1199093) minus108 001 001 001119911119862(1199094) minus296 1741 1365 068119910119863(1199095) minus026 minus156 minus161 042119911119863(1199096) minus068 minus1651 minus1684 101119910119865(1199097) minus022 minus152 minus161 minus037119911119865(1199098) minus028 minus161 minus1707 minus197119910119866(1199099) minus132 minus001 0 0119911119866(11990910) 826 minus76 015 015
coordinates of hardpoints during operations The wheelgeometry parameters that affect the steerability of the vehicleare camber caster SAI and toe
The sensitivity results of wheel geometry parameterscan be calculated as the steering effort and steering wheelreturnability produced by the tires to predict the behaviorsof vehicle as shown in Table 2 The negative caster anglescan reduce the steering effort but weaken the steering wheelreturnability Smaller SAI angles can be favourable to steeringeffort but deteriorate the steering wheel returnability as wellFor that purpose optimal approaches of design parameterschanges used to require trade-offs to retain mutual balanceThe sensitivity characteristics of different wheel alignmentparameters are strongly correlated with hardpoint positionsof control arms in the suspension system
In Table 2 the different contributing levels of eachhardpoint position have been revealed to their effects onthe variations of wheel alignments The SAI angle is mainlydependent on the vertical locations of 119860 119862 119885 and 119865 pointsthe toe angle depends on the vertical locations of 119860 119862and 119866 points The vertical locations of 119860 119864 and 119865 pointsas the design important parameters have a significant effecton camber angle on steering response The data analysis ofTable 2 allows us to explore potential of optimization of thelocations of critical hardpoints with multiobjective functionand geometry constraints
3 Optimization and Simulation
31 GA Optimization Method Genetic Algorithms as opti-mization techniques using powerful and global search meth-ods imitate the processes present in natural evolution basedon Darwinianrsquos survival of the best fitness theory [18ndash21]Three coral and repeating stages mainly consist of selectioncrossover andmutationTherefore the biological individualscontained in design variables as a population can be con-verted into one long informative string It is a convenient wayto regard binary segments encoding the optimal parametersas a chromosome The convergence of population membersis checked and updated at each time step after the evaluationof fitness The fitness functions are considered within 4 forall population members to guide next steps towards optimaldesign solutions The best member of the current population
Start
Initialize population
Gen = 1
Evaluate population
Converged
Gen = Gen + 1
Gen = Max
End
Selection
Crossover
Mutation
No
Yes
Figure 4 Flow chart of GA optimization process
is alive and gains higher probability of reproduction whichwill form a new offspring It is the best solution that improvesindividual genetic characteristics generation until the optimalfitness set is obtained
In the selection part multiple population members arechosen at random conditions to produce the best one basedon their fitness functions The hypothetical individuals withhigher fitness are reproduced by processes of crossoverand mutation to generate the new offspring Repetitionof the processes brings about evolutionary population thatstrengthens their fitness function After selecting one outof three members the process repeats until the number ofselected members matches the population size Then themating mechanism manipulates the genomes of the parentbased on crossover stage Firstly the two selected memberscreate two members of the new population Then twomembers are added to create the next generation under adefined crossover limit Since the crossover operation thealgorithm of mutation allows for the possibility that somealternatives of the available population in the initial randomlycan be represented within a mutation limit set The mutationrate uses 1 in the GA arithmetic process as shown inFigure 4
The procedure of the generic multiobjective GA is givenas follows
Step 1 Generate a random initialized population
Step 2 For each objective Gen Gen = 1 2 119896 generate arandom number and weight for each objective
Step 3 Evaluate the fitness of the solution in the sortedpopulation and calculate the selection probability of eachsolution
Mathematical Problems in Engineering 5
Table 3 Comparison between original and optimized parameters of the LSA suspension mm
Design variables 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863 119910119865 119911119865 119910119866 119911119866Original 1962 minus1343 1962 minus1343 2615 757 2615 757 5742 minus80Optimized 2052 1293 2052 1293 2605 747 2605 747 5752 minus75
Step 4 Select parents using the selection probabilities inStep 3
Step 5 Apply the crossover on the selected parent pairs tocreate new offspring
Step 6 Mutate the offspring created in Step 5 with a pre-specified mutation rate and put all the offspring into the newpopulation
Step 7 If the stopping condition (Gen =Max) is not satisfiedset Gen = Gen + 1 and go to Step 3 Otherwise end theprocedure
32 GA Optimizing Suspension Model The aim is to find theoptimal coordinates of hardpoints which are the key locationsto influence on suspension characteristics according to theirrelative orientations The design procedure accomplishesa suitable compromise between resolution accuracy andcomputational speed In order to investigate the effect ofgeometry changes on suspension displacement limited to itsfree travel the vertical and lateral direction of five hardpoints(119860 119862119863 119865 and119866) are selected as optimization variables andencoded into a binary string with fixed length
The length of whole chromosome string has eight bitsin GA optimization solution process because eight bits cor-respond to each value of parameter 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863119910119865 119911119865 119910119866 and 119911119866 respectively
For example 1198781 represents 00100100 which means thecorresponding decimal values given as
119910119860 = 119883119910119860min +119889119910119860
28 minus 1 (119883119910119860min minus 119883119910119860max) (5)
where 119883119910119860min and 119883119910119860max are the limit range for the coordi-nates of hardpoint 119910119860 and 119889119910119860 represents the binary value for1198781
The aim of the optimization work is to minimize thesum of dynamic changes of wheel alignments The designvariations of hardpoint positions could be performed forgeometry constrains and multiobjective optimizations
After the preceding analysis a GA optimization pro-gram is compiled and verified via implementation of virtualsimulations The block diagram representation of the GAoperation process is given in Figure 5with the aimof reachingminimum error To correspond with the actual demandfor the variation ranges in the wheel alignments and LASsuspension system the corresponding original and optimizedvalues of hardpoint positions are shown in Table 3
33 Performance Analysis with Time Delay When the con-straints in multiobjective optimizations are activated the
LSA suspensionstructure
Hardpoints
Characteristic
Modelling
Kinematostatic
Sensitivity
Analysis
Optimization
Output results
Evaluate fitness
Convergence Selection
Crossover
Mutation
Convert chromosomes
No
Yes
Figure 5 Block diagram of GA optimization program
suspension system parameters such as spring constant anddamping coefficient need to reconsider the effect of timedelay on dynamic behavior due to the distance of front andrear axles (wheelbase) and different velocity
The dynamic behavior can be correctly simulated bytaking into account the value of time delay caused by the roadexcitations at the front and rear axles
119902119891 (119905) = 119902119903 (119905 + 120591) (6)
where 119902119891(119905) and 119902119903(119905) are displacement excitations at frontand rear axles respectively and 120591 means time delay whichcan be calculated as follows
120591 = (119886 + 119887)V
(7)
where 119886 and 119887 are the distance of mass center from front andrear axle separately and V represents vehicle speed
The parameters of vehicle are summarized in Table 4The white noise disturbance that generates normally
distributed random numbers such as a sequence feeds theinput of nonlinear time delay model with the following set ofparameters noise power (the road roughness coefficient) 119875 =256 times 10minus6 and sample time 119879119890 = 001 s
For the value of time delay corresponding velocity ofvehicle is computed by (7) Vℎ = 80 kmh indicates 1205911 =
6 Mathematical Problems in Engineering
Table 4 Specification of the selected suspension system
119898119904 kg 119898119906 kg 119896119904 Nm 119896119905 Nm 119862119904 Nsm 119886 m 119887 m240 36 16000 160000 1400 12 13
Front suspensionRear suspension t1Rear suspension t2
04 06 08 1 12 14 16 1802
Time (sec)
minus5
0
5
10
Body
acce
lera
tion
(ms
e=2)
Figure 6 Time history of the body accelerationwith different valuesof time delay
01125 s and V119897 = 40 kmh means 1205912 = 0225 s Theeffects of different time delay are shown in Figure 6 Thetime delay is not a constant but varies with the vehiclespeed and the road roughness coefficient The variation offrequency characteristic is activated to diminish time delaythat is followed by increasing vehicle speed It is obvious thatvehicle body acceleration increases with time delay whichdeteriorates ride comfort of the driver
The frequency response analyses from the road dis-placement to the body vertical acceleration and suspensiondistortion are obtained by high vehicle speed and low vehiclespeed as in Figures 7 and 8
At low frequency suspension provides a satisfied damp-ing of the body vertical acceleration but a bad filter of midand high frequencies On the other hand a high time delayensures a good filtering but a badly damped body verticalacceleration
34 Simulation and Experiment To correspond with thekinematics simulation analysis the double-wishbone typesuspension is designed with understeer characteristics Thesimulation and experimental curves are illustrated in com-parison with original and optimization toe and camber of thefront suspension travel in Figures 9 and 10
The camber angle decreases from 1152∘ to 105∘ and toe-inangle reduces from 1036∘ to 0944∘Thenonlinear suspensionsystem with different values of time delay is investigatedby numerical simulation The travel displacements fromminus30mm to 30mm are utilized on front-right suspensionIn Figure 9 it has been proved that the typical toe-outcharacteristics with a negative camber angle are beneficialto maintain the track path The toe angle has a tendency
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus1
100
101
102
103
Body
acce
lera
tion
road
disp
lace
men
t (dB
)
Figure 7 Frequency responses road displacement to body verticalacceleration
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus2
10minus1
100
101
Susp
ensio
n di
stort
ion
road
disp
lace
men
t (dB
)
Figure 8 Frequency responses road displacement to suspensiondistortion
with relatively small variation which improves the steeringresponse and road feeling at different suspension travelsAs shown in Figure 10 the comparison with camber angleof original and optimization coordinates is obtained withthe tire bouncing from the lowest position to the highestposition The two curves of camber angle are fitted wellexcept for two ends of the suspension travel The negative
Mathematical Problems in Engineering 7
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus08
minus06
minus04
minus02
0
02
04
Toe a
ngle
(deg
)
Figure 9 Block diagram of GA operation on LSA suspension andsteering mechanism
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus18
minus16
minus14
minus12
minus1
minus08
minus06
minus04
Cam
ber a
ngle
(deg
)
Figure 10 Block diagram of GA operation on LSA suspension andsteering mechanism
camber angle is the biggest contributor to keeping the vehicleon its straight-line path At the compression and extensionprocesses of suspension motion the curves clearly indicatethe hysteresis characteristic model of suspension with theoptimization coordinates of hardpoint Also there are moredesirable characteristics for vehicle driving steerability thanbefore
The kinematics and compliance (KampC) facility is con-structed with optical autocollimator sensors that are usedto measure the toe and camber angle amplifiers and dataacquisition systems to record the values in the whole testcourse The test bench mainly consists of six hydraulicactuators to generate longitudinal lateral and vertical forceson two wheels with one axle as shown in Figure 11 Becauseof the compliance steer forces elastic bushing elements and
Figure 11 Kinematics and compliance test bench
motions between the tire and road surface in the simulationare different from the real test bench The influence of wheeltravels on front suspension is taken into account which isessential for performing the experiment of actual workingsituations The similarity of both simulation and testingcurves is in very good agreement with the extremes of wheel
4 Conclusions
By using multibody simulation tool the double-wishbonetype suspension (LSA) system has been built up for mea-suring values of the geometry and kinematic qualities Thesensitivity analysis process has been derived from a nonlinearcomputer model in order to optimize the principal designvariables of main hardpoints Consequently the suspensionmodel was simulated under certain driving conditions withoptimized values and different values of time delay The GAoptimal solutions have been tested andmodification of coeffi-cients was repeated for the elastic elements such as the springstiffness and damper It is necessary that the computer modeland prototype have been obtained to validate effectivenessof the proposed method The simulation and computationalprocedure can be applied to design an optimization problemof any other kind of suspension systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this manuscript
Acknowledgments
This research work was supported by International Science ampTechnology Cooperation Program of China (2013DFA31920)the National Key Research and Development Program ofChina (2017YFD0401304) and the National Natural ScienceFoundation of China (Grant no 51476143)
References
[1] M Heidari and H Homaei ldquoDesign a PID controller for sus-pension system by back propagation neural networkrdquo Journalof Engineering vol 2013 Article ID 421543 pp 1ndash9 2013
8 Mathematical Problems in Engineering
[2] C Tan R Xu Z Wang L Si and X Liu ldquoAn improvedgenetic fuzzy logic control method to reduce the enlargementof coal floor deformation in shearer memory cutting processrdquoComputational Intelligence and Neuroscience vol 2016 ArticleID 3973627 pp 1ndash14 2016
[3] D Ozcan U Sonmez and L Guvenc ldquoOptimisation of thenonlinear suspension characteristics of a light commercialvehiclerdquo International Journal of Vehicular Technology vol 2013Article ID 562424 pp 1ndash16 2013
[4] A Seifi R Hassannejad and M A Hamed ldquoUse of nonlinearasymmetrical shock absorbers in multi-objective optimizationof the suspension system in a variety of road excitationsrdquoProceedings of the Institution of Mechanical Engineers Part KJournal of Multi-body Dynamics vol 231 no 2 pp 372ndash3872017
[5] V Savsani V Patel B Gadhvi and M Tawhid ldquoPareto opti-mization of a half car passive suspension model using a novelmultiobjective heat transfer search algorithmrdquo Modelling andSimulation in Engineering vol 2017 Article ID 2034907 pp 1ndash172017
[6] V Mehta M Patel Y Gandhi and B Gadhvi ldquoAn experimentalapproach of estimating speed bump profile to optimizing thesuspension parameters using TLBOrdquo Journal of Advances inVehicle Engineering vol 2 no 2 pp 65ndash74 2016
[7] A Jamali H Shams and M Fasihozaman ldquoPareto multi-objective optimum design of vehicle-suspension system underrandom road excitationsrdquo Proceedings of the Institution ofMechanical Engineers Part K Journal of Multi-body Dynamicsvol 228 no 3 pp 282ndash293 2014
[8] T Tak S Chung and H Chun ldquoAn optimal design softwarefor vehicle suspension systemsrdquo SAE Technical Papers 2000-01-1618 2000
[9] K-H Suh Y-K Lee and H-M Jeong ldquoA study on thehandling performances of a large-sized bus with the change ofrear suspension geometryrdquo SAE Technical Papers 2002-01-30712002
[10] J Park J Yi and D Lee ldquoInvestigation into suspensiondynamic compliance characteristics using direct measurementand simulationrdquo SAE Technical Papers 2004-01-1065 2004
[11] H-S Kim W-J Do J-S Shim and S-R Choi ldquoThe stabilityanalysis of steering and suspension parameters on hands freemotionrdquo SAE Technical Papers 2002-01-0620 2002
[12] S A Mitchell S Smith A Damiano J Durgavich and RMacCracken ldquoUse of genetic algorithms with multiple metricsaimed at the optimization of automotive suspension systemsrdquoSAE Technical Papers 2004-01-3520 2004
[13] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[14] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash3682016
[15] A C Mitra G J Desai S R Patwardhan P H Shirke W MH Kurne and N Banerjee ldquoOptimization of passive vehiclesuspension system by genetic algorithmrdquo Procedia Engineeringvol 144 pp 1158ndash1166 2016
[16] J Yan Z Yin X Guo and C Fu ldquoFuzzy control of semi-active air suspension for cab based on genetic algorithmsrdquo SAETechnical Papers 2008-01-2681 2008
[17] S Hasagasioglu K Kilicaslan O Atabay and A Guney ldquoVehi-cle dynamics analysis of a heavy-duty commercial vehicle byusingmultibody simulationmethodsrdquoTheInternational Journalof AdvancedManufacturing Technology vol 60 no 5-8 pp 825ndash839 2012
[18] K Abdullah W C David and E S Alice ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[19] N Srinivas and K Deb ldquoMultiobjective optimization usingnon-dominated sorting in genetic algorithmsrdquo EvolutionaryComputation vol 2 no 3 pp 221ndash248 1995
[20] R Darvishi M N Esfahany and R Bagheri ldquoNumerical studyon increasing PVC suspension polymerization productivity byusing PSO optimization algorithmrdquo International Journal ofPlastics Technology vol 20 no 2 pp 219ndash230 2016
[21] J Wu Z Luo Y Zhang and N Zhang ldquoAn interval uncertainoptimization method for vehicle suspensions using Chebyshevmetamodelsrdquo Applied Mathematical Modelling vol 38 no 15-16 pp 3706ndash3723 2014
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 5
Table 3 Comparison between original and optimized parameters of the LSA suspension mm
Design variables 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863 119910119865 119911119865 119910119866 119911119866Original 1962 minus1343 1962 minus1343 2615 757 2615 757 5742 minus80Optimized 2052 1293 2052 1293 2605 747 2605 747 5752 minus75
Step 4 Select parents using the selection probabilities inStep 3
Step 5 Apply the crossover on the selected parent pairs tocreate new offspring
Step 6 Mutate the offspring created in Step 5 with a pre-specified mutation rate and put all the offspring into the newpopulation
Step 7 If the stopping condition (Gen =Max) is not satisfiedset Gen = Gen + 1 and go to Step 3 Otherwise end theprocedure
32 GA Optimizing Suspension Model The aim is to find theoptimal coordinates of hardpoints which are the key locationsto influence on suspension characteristics according to theirrelative orientations The design procedure accomplishesa suitable compromise between resolution accuracy andcomputational speed In order to investigate the effect ofgeometry changes on suspension displacement limited to itsfree travel the vertical and lateral direction of five hardpoints(119860 119862119863 119865 and119866) are selected as optimization variables andencoded into a binary string with fixed length
The length of whole chromosome string has eight bitsin GA optimization solution process because eight bits cor-respond to each value of parameter 119910119860 119911119860 119910119862 119911119862 119910119863 119911119863119910119865 119911119865 119910119866 and 119911119866 respectively
For example 1198781 represents 00100100 which means thecorresponding decimal values given as
119910119860 = 119883119910119860min +119889119910119860
28 minus 1 (119883119910119860min minus 119883119910119860max) (5)
where 119883119910119860min and 119883119910119860max are the limit range for the coordi-nates of hardpoint 119910119860 and 119889119910119860 represents the binary value for1198781
The aim of the optimization work is to minimize thesum of dynamic changes of wheel alignments The designvariations of hardpoint positions could be performed forgeometry constrains and multiobjective optimizations
After the preceding analysis a GA optimization pro-gram is compiled and verified via implementation of virtualsimulations The block diagram representation of the GAoperation process is given in Figure 5with the aimof reachingminimum error To correspond with the actual demandfor the variation ranges in the wheel alignments and LASsuspension system the corresponding original and optimizedvalues of hardpoint positions are shown in Table 3
33 Performance Analysis with Time Delay When the con-straints in multiobjective optimizations are activated the
LSA suspensionstructure
Hardpoints
Characteristic
Modelling
Kinematostatic
Sensitivity
Analysis
Optimization
Output results
Evaluate fitness
Convergence Selection
Crossover
Mutation
Convert chromosomes
No
Yes
Figure 5 Block diagram of GA optimization program
suspension system parameters such as spring constant anddamping coefficient need to reconsider the effect of timedelay on dynamic behavior due to the distance of front andrear axles (wheelbase) and different velocity
The dynamic behavior can be correctly simulated bytaking into account the value of time delay caused by the roadexcitations at the front and rear axles
119902119891 (119905) = 119902119903 (119905 + 120591) (6)
where 119902119891(119905) and 119902119903(119905) are displacement excitations at frontand rear axles respectively and 120591 means time delay whichcan be calculated as follows
120591 = (119886 + 119887)V
(7)
where 119886 and 119887 are the distance of mass center from front andrear axle separately and V represents vehicle speed
The parameters of vehicle are summarized in Table 4The white noise disturbance that generates normally
distributed random numbers such as a sequence feeds theinput of nonlinear time delay model with the following set ofparameters noise power (the road roughness coefficient) 119875 =256 times 10minus6 and sample time 119879119890 = 001 s
For the value of time delay corresponding velocity ofvehicle is computed by (7) Vℎ = 80 kmh indicates 1205911 =
6 Mathematical Problems in Engineering
Table 4 Specification of the selected suspension system
119898119904 kg 119898119906 kg 119896119904 Nm 119896119905 Nm 119862119904 Nsm 119886 m 119887 m240 36 16000 160000 1400 12 13
Front suspensionRear suspension t1Rear suspension t2
04 06 08 1 12 14 16 1802
Time (sec)
minus5
0
5
10
Body
acce
lera
tion
(ms
e=2)
Figure 6 Time history of the body accelerationwith different valuesof time delay
01125 s and V119897 = 40 kmh means 1205912 = 0225 s Theeffects of different time delay are shown in Figure 6 Thetime delay is not a constant but varies with the vehiclespeed and the road roughness coefficient The variation offrequency characteristic is activated to diminish time delaythat is followed by increasing vehicle speed It is obvious thatvehicle body acceleration increases with time delay whichdeteriorates ride comfort of the driver
The frequency response analyses from the road dis-placement to the body vertical acceleration and suspensiondistortion are obtained by high vehicle speed and low vehiclespeed as in Figures 7 and 8
At low frequency suspension provides a satisfied damp-ing of the body vertical acceleration but a bad filter of midand high frequencies On the other hand a high time delayensures a good filtering but a badly damped body verticalacceleration
34 Simulation and Experiment To correspond with thekinematics simulation analysis the double-wishbone typesuspension is designed with understeer characteristics Thesimulation and experimental curves are illustrated in com-parison with original and optimization toe and camber of thefront suspension travel in Figures 9 and 10
The camber angle decreases from 1152∘ to 105∘ and toe-inangle reduces from 1036∘ to 0944∘Thenonlinear suspensionsystem with different values of time delay is investigatedby numerical simulation The travel displacements fromminus30mm to 30mm are utilized on front-right suspensionIn Figure 9 it has been proved that the typical toe-outcharacteristics with a negative camber angle are beneficialto maintain the track path The toe angle has a tendency
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus1
100
101
102
103
Body
acce
lera
tion
road
disp
lace
men
t (dB
)
Figure 7 Frequency responses road displacement to body verticalacceleration
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus2
10minus1
100
101
Susp
ensio
n di
stort
ion
road
disp
lace
men
t (dB
)
Figure 8 Frequency responses road displacement to suspensiondistortion
with relatively small variation which improves the steeringresponse and road feeling at different suspension travelsAs shown in Figure 10 the comparison with camber angleof original and optimization coordinates is obtained withthe tire bouncing from the lowest position to the highestposition The two curves of camber angle are fitted wellexcept for two ends of the suspension travel The negative
Mathematical Problems in Engineering 7
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus08
minus06
minus04
minus02
0
02
04
Toe a
ngle
(deg
)
Figure 9 Block diagram of GA operation on LSA suspension andsteering mechanism
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus18
minus16
minus14
minus12
minus1
minus08
minus06
minus04
Cam
ber a
ngle
(deg
)
Figure 10 Block diagram of GA operation on LSA suspension andsteering mechanism
camber angle is the biggest contributor to keeping the vehicleon its straight-line path At the compression and extensionprocesses of suspension motion the curves clearly indicatethe hysteresis characteristic model of suspension with theoptimization coordinates of hardpoint Also there are moredesirable characteristics for vehicle driving steerability thanbefore
The kinematics and compliance (KampC) facility is con-structed with optical autocollimator sensors that are usedto measure the toe and camber angle amplifiers and dataacquisition systems to record the values in the whole testcourse The test bench mainly consists of six hydraulicactuators to generate longitudinal lateral and vertical forceson two wheels with one axle as shown in Figure 11 Becauseof the compliance steer forces elastic bushing elements and
Figure 11 Kinematics and compliance test bench
motions between the tire and road surface in the simulationare different from the real test bench The influence of wheeltravels on front suspension is taken into account which isessential for performing the experiment of actual workingsituations The similarity of both simulation and testingcurves is in very good agreement with the extremes of wheel
4 Conclusions
By using multibody simulation tool the double-wishbonetype suspension (LSA) system has been built up for mea-suring values of the geometry and kinematic qualities Thesensitivity analysis process has been derived from a nonlinearcomputer model in order to optimize the principal designvariables of main hardpoints Consequently the suspensionmodel was simulated under certain driving conditions withoptimized values and different values of time delay The GAoptimal solutions have been tested andmodification of coeffi-cients was repeated for the elastic elements such as the springstiffness and damper It is necessary that the computer modeland prototype have been obtained to validate effectivenessof the proposed method The simulation and computationalprocedure can be applied to design an optimization problemof any other kind of suspension systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this manuscript
Acknowledgments
This research work was supported by International Science ampTechnology Cooperation Program of China (2013DFA31920)the National Key Research and Development Program ofChina (2017YFD0401304) and the National Natural ScienceFoundation of China (Grant no 51476143)
References
[1] M Heidari and H Homaei ldquoDesign a PID controller for sus-pension system by back propagation neural networkrdquo Journalof Engineering vol 2013 Article ID 421543 pp 1ndash9 2013
8 Mathematical Problems in Engineering
[2] C Tan R Xu Z Wang L Si and X Liu ldquoAn improvedgenetic fuzzy logic control method to reduce the enlargementof coal floor deformation in shearer memory cutting processrdquoComputational Intelligence and Neuroscience vol 2016 ArticleID 3973627 pp 1ndash14 2016
[3] D Ozcan U Sonmez and L Guvenc ldquoOptimisation of thenonlinear suspension characteristics of a light commercialvehiclerdquo International Journal of Vehicular Technology vol 2013Article ID 562424 pp 1ndash16 2013
[4] A Seifi R Hassannejad and M A Hamed ldquoUse of nonlinearasymmetrical shock absorbers in multi-objective optimizationof the suspension system in a variety of road excitationsrdquoProceedings of the Institution of Mechanical Engineers Part KJournal of Multi-body Dynamics vol 231 no 2 pp 372ndash3872017
[5] V Savsani V Patel B Gadhvi and M Tawhid ldquoPareto opti-mization of a half car passive suspension model using a novelmultiobjective heat transfer search algorithmrdquo Modelling andSimulation in Engineering vol 2017 Article ID 2034907 pp 1ndash172017
[6] V Mehta M Patel Y Gandhi and B Gadhvi ldquoAn experimentalapproach of estimating speed bump profile to optimizing thesuspension parameters using TLBOrdquo Journal of Advances inVehicle Engineering vol 2 no 2 pp 65ndash74 2016
[7] A Jamali H Shams and M Fasihozaman ldquoPareto multi-objective optimum design of vehicle-suspension system underrandom road excitationsrdquo Proceedings of the Institution ofMechanical Engineers Part K Journal of Multi-body Dynamicsvol 228 no 3 pp 282ndash293 2014
[8] T Tak S Chung and H Chun ldquoAn optimal design softwarefor vehicle suspension systemsrdquo SAE Technical Papers 2000-01-1618 2000
[9] K-H Suh Y-K Lee and H-M Jeong ldquoA study on thehandling performances of a large-sized bus with the change ofrear suspension geometryrdquo SAE Technical Papers 2002-01-30712002
[10] J Park J Yi and D Lee ldquoInvestigation into suspensiondynamic compliance characteristics using direct measurementand simulationrdquo SAE Technical Papers 2004-01-1065 2004
[11] H-S Kim W-J Do J-S Shim and S-R Choi ldquoThe stabilityanalysis of steering and suspension parameters on hands freemotionrdquo SAE Technical Papers 2002-01-0620 2002
[12] S A Mitchell S Smith A Damiano J Durgavich and RMacCracken ldquoUse of genetic algorithms with multiple metricsaimed at the optimization of automotive suspension systemsrdquoSAE Technical Papers 2004-01-3520 2004
[13] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[14] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash3682016
[15] A C Mitra G J Desai S R Patwardhan P H Shirke W MH Kurne and N Banerjee ldquoOptimization of passive vehiclesuspension system by genetic algorithmrdquo Procedia Engineeringvol 144 pp 1158ndash1166 2016
[16] J Yan Z Yin X Guo and C Fu ldquoFuzzy control of semi-active air suspension for cab based on genetic algorithmsrdquo SAETechnical Papers 2008-01-2681 2008
[17] S Hasagasioglu K Kilicaslan O Atabay and A Guney ldquoVehi-cle dynamics analysis of a heavy-duty commercial vehicle byusingmultibody simulationmethodsrdquoTheInternational Journalof AdvancedManufacturing Technology vol 60 no 5-8 pp 825ndash839 2012
[18] K Abdullah W C David and E S Alice ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[19] N Srinivas and K Deb ldquoMultiobjective optimization usingnon-dominated sorting in genetic algorithmsrdquo EvolutionaryComputation vol 2 no 3 pp 221ndash248 1995
[20] R Darvishi M N Esfahany and R Bagheri ldquoNumerical studyon increasing PVC suspension polymerization productivity byusing PSO optimization algorithmrdquo International Journal ofPlastics Technology vol 20 no 2 pp 219ndash230 2016
[21] J Wu Z Luo Y Zhang and N Zhang ldquoAn interval uncertainoptimization method for vehicle suspensions using Chebyshevmetamodelsrdquo Applied Mathematical Modelling vol 38 no 15-16 pp 3706ndash3723 2014
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Mathematical Problems in Engineering
Table 4 Specification of the selected suspension system
119898119904 kg 119898119906 kg 119896119904 Nm 119896119905 Nm 119862119904 Nsm 119886 m 119887 m240 36 16000 160000 1400 12 13
Front suspensionRear suspension t1Rear suspension t2
04 06 08 1 12 14 16 1802
Time (sec)
minus5
0
5
10
Body
acce
lera
tion
(ms
e=2)
Figure 6 Time history of the body accelerationwith different valuesof time delay
01125 s and V119897 = 40 kmh means 1205912 = 0225 s Theeffects of different time delay are shown in Figure 6 Thetime delay is not a constant but varies with the vehiclespeed and the road roughness coefficient The variation offrequency characteristic is activated to diminish time delaythat is followed by increasing vehicle speed It is obvious thatvehicle body acceleration increases with time delay whichdeteriorates ride comfort of the driver
The frequency response analyses from the road dis-placement to the body vertical acceleration and suspensiondistortion are obtained by high vehicle speed and low vehiclespeed as in Figures 7 and 8
At low frequency suspension provides a satisfied damp-ing of the body vertical acceleration but a bad filter of midand high frequencies On the other hand a high time delayensures a good filtering but a badly damped body verticalacceleration
34 Simulation and Experiment To correspond with thekinematics simulation analysis the double-wishbone typesuspension is designed with understeer characteristics Thesimulation and experimental curves are illustrated in com-parison with original and optimization toe and camber of thefront suspension travel in Figures 9 and 10
The camber angle decreases from 1152∘ to 105∘ and toe-inangle reduces from 1036∘ to 0944∘Thenonlinear suspensionsystem with different values of time delay is investigatedby numerical simulation The travel displacements fromminus30mm to 30mm are utilized on front-right suspensionIn Figure 9 it has been proved that the typical toe-outcharacteristics with a negative camber angle are beneficialto maintain the track path The toe angle has a tendency
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus1
100
101
102
103
Body
acce
lera
tion
road
disp
lace
men
t (dB
)
Figure 7 Frequency responses road displacement to body verticalacceleration
Frequency (Hz)
Front suspensionRear suspension t2Rear suspension t1
101
102
10minus2
10minus1
100
101
Susp
ensio
n di
stort
ion
road
disp
lace
men
t (dB
)
Figure 8 Frequency responses road displacement to suspensiondistortion
with relatively small variation which improves the steeringresponse and road feeling at different suspension travelsAs shown in Figure 10 the comparison with camber angleof original and optimization coordinates is obtained withthe tire bouncing from the lowest position to the highestposition The two curves of camber angle are fitted wellexcept for two ends of the suspension travel The negative
Mathematical Problems in Engineering 7
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus08
minus06
minus04
minus02
0
02
04
Toe a
ngle
(deg
)
Figure 9 Block diagram of GA operation on LSA suspension andsteering mechanism
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus18
minus16
minus14
minus12
minus1
minus08
minus06
minus04
Cam
ber a
ngle
(deg
)
Figure 10 Block diagram of GA operation on LSA suspension andsteering mechanism
camber angle is the biggest contributor to keeping the vehicleon its straight-line path At the compression and extensionprocesses of suspension motion the curves clearly indicatethe hysteresis characteristic model of suspension with theoptimization coordinates of hardpoint Also there are moredesirable characteristics for vehicle driving steerability thanbefore
The kinematics and compliance (KampC) facility is con-structed with optical autocollimator sensors that are usedto measure the toe and camber angle amplifiers and dataacquisition systems to record the values in the whole testcourse The test bench mainly consists of six hydraulicactuators to generate longitudinal lateral and vertical forceson two wheels with one axle as shown in Figure 11 Becauseof the compliance steer forces elastic bushing elements and
Figure 11 Kinematics and compliance test bench
motions between the tire and road surface in the simulationare different from the real test bench The influence of wheeltravels on front suspension is taken into account which isessential for performing the experiment of actual workingsituations The similarity of both simulation and testingcurves is in very good agreement with the extremes of wheel
4 Conclusions
By using multibody simulation tool the double-wishbonetype suspension (LSA) system has been built up for mea-suring values of the geometry and kinematic qualities Thesensitivity analysis process has been derived from a nonlinearcomputer model in order to optimize the principal designvariables of main hardpoints Consequently the suspensionmodel was simulated under certain driving conditions withoptimized values and different values of time delay The GAoptimal solutions have been tested andmodification of coeffi-cients was repeated for the elastic elements such as the springstiffness and damper It is necessary that the computer modeland prototype have been obtained to validate effectivenessof the proposed method The simulation and computationalprocedure can be applied to design an optimization problemof any other kind of suspension systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this manuscript
Acknowledgments
This research work was supported by International Science ampTechnology Cooperation Program of China (2013DFA31920)the National Key Research and Development Program ofChina (2017YFD0401304) and the National Natural ScienceFoundation of China (Grant no 51476143)
References
[1] M Heidari and H Homaei ldquoDesign a PID controller for sus-pension system by back propagation neural networkrdquo Journalof Engineering vol 2013 Article ID 421543 pp 1ndash9 2013
8 Mathematical Problems in Engineering
[2] C Tan R Xu Z Wang L Si and X Liu ldquoAn improvedgenetic fuzzy logic control method to reduce the enlargementof coal floor deformation in shearer memory cutting processrdquoComputational Intelligence and Neuroscience vol 2016 ArticleID 3973627 pp 1ndash14 2016
[3] D Ozcan U Sonmez and L Guvenc ldquoOptimisation of thenonlinear suspension characteristics of a light commercialvehiclerdquo International Journal of Vehicular Technology vol 2013Article ID 562424 pp 1ndash16 2013
[4] A Seifi R Hassannejad and M A Hamed ldquoUse of nonlinearasymmetrical shock absorbers in multi-objective optimizationof the suspension system in a variety of road excitationsrdquoProceedings of the Institution of Mechanical Engineers Part KJournal of Multi-body Dynamics vol 231 no 2 pp 372ndash3872017
[5] V Savsani V Patel B Gadhvi and M Tawhid ldquoPareto opti-mization of a half car passive suspension model using a novelmultiobjective heat transfer search algorithmrdquo Modelling andSimulation in Engineering vol 2017 Article ID 2034907 pp 1ndash172017
[6] V Mehta M Patel Y Gandhi and B Gadhvi ldquoAn experimentalapproach of estimating speed bump profile to optimizing thesuspension parameters using TLBOrdquo Journal of Advances inVehicle Engineering vol 2 no 2 pp 65ndash74 2016
[7] A Jamali H Shams and M Fasihozaman ldquoPareto multi-objective optimum design of vehicle-suspension system underrandom road excitationsrdquo Proceedings of the Institution ofMechanical Engineers Part K Journal of Multi-body Dynamicsvol 228 no 3 pp 282ndash293 2014
[8] T Tak S Chung and H Chun ldquoAn optimal design softwarefor vehicle suspension systemsrdquo SAE Technical Papers 2000-01-1618 2000
[9] K-H Suh Y-K Lee and H-M Jeong ldquoA study on thehandling performances of a large-sized bus with the change ofrear suspension geometryrdquo SAE Technical Papers 2002-01-30712002
[10] J Park J Yi and D Lee ldquoInvestigation into suspensiondynamic compliance characteristics using direct measurementand simulationrdquo SAE Technical Papers 2004-01-1065 2004
[11] H-S Kim W-J Do J-S Shim and S-R Choi ldquoThe stabilityanalysis of steering and suspension parameters on hands freemotionrdquo SAE Technical Papers 2002-01-0620 2002
[12] S A Mitchell S Smith A Damiano J Durgavich and RMacCracken ldquoUse of genetic algorithms with multiple metricsaimed at the optimization of automotive suspension systemsrdquoSAE Technical Papers 2004-01-3520 2004
[13] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[14] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash3682016
[15] A C Mitra G J Desai S R Patwardhan P H Shirke W MH Kurne and N Banerjee ldquoOptimization of passive vehiclesuspension system by genetic algorithmrdquo Procedia Engineeringvol 144 pp 1158ndash1166 2016
[16] J Yan Z Yin X Guo and C Fu ldquoFuzzy control of semi-active air suspension for cab based on genetic algorithmsrdquo SAETechnical Papers 2008-01-2681 2008
[17] S Hasagasioglu K Kilicaslan O Atabay and A Guney ldquoVehi-cle dynamics analysis of a heavy-duty commercial vehicle byusingmultibody simulationmethodsrdquoTheInternational Journalof AdvancedManufacturing Technology vol 60 no 5-8 pp 825ndash839 2012
[18] K Abdullah W C David and E S Alice ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[19] N Srinivas and K Deb ldquoMultiobjective optimization usingnon-dominated sorting in genetic algorithmsrdquo EvolutionaryComputation vol 2 no 3 pp 221ndash248 1995
[20] R Darvishi M N Esfahany and R Bagheri ldquoNumerical studyon increasing PVC suspension polymerization productivity byusing PSO optimization algorithmrdquo International Journal ofPlastics Technology vol 20 no 2 pp 219ndash230 2016
[21] J Wu Z Luo Y Zhang and N Zhang ldquoAn interval uncertainoptimization method for vehicle suspensions using Chebyshevmetamodelsrdquo Applied Mathematical Modelling vol 38 no 15-16 pp 3706ndash3723 2014
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 7
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus08
minus06
minus04
minus02
0
02
04
Toe a
ngle
(deg
)
Figure 9 Block diagram of GA operation on LSA suspension andsteering mechanism
minus40 minus30 minus20 minus10 0 10 20 30 40
Normal responseOptimized responseTest bench response
Wheel travel (mm)
minus18
minus16
minus14
minus12
minus1
minus08
minus06
minus04
Cam
ber a
ngle
(deg
)
Figure 10 Block diagram of GA operation on LSA suspension andsteering mechanism
camber angle is the biggest contributor to keeping the vehicleon its straight-line path At the compression and extensionprocesses of suspension motion the curves clearly indicatethe hysteresis characteristic model of suspension with theoptimization coordinates of hardpoint Also there are moredesirable characteristics for vehicle driving steerability thanbefore
The kinematics and compliance (KampC) facility is con-structed with optical autocollimator sensors that are usedto measure the toe and camber angle amplifiers and dataacquisition systems to record the values in the whole testcourse The test bench mainly consists of six hydraulicactuators to generate longitudinal lateral and vertical forceson two wheels with one axle as shown in Figure 11 Becauseof the compliance steer forces elastic bushing elements and
Figure 11 Kinematics and compliance test bench
motions between the tire and road surface in the simulationare different from the real test bench The influence of wheeltravels on front suspension is taken into account which isessential for performing the experiment of actual workingsituations The similarity of both simulation and testingcurves is in very good agreement with the extremes of wheel
4 Conclusions
By using multibody simulation tool the double-wishbonetype suspension (LSA) system has been built up for mea-suring values of the geometry and kinematic qualities Thesensitivity analysis process has been derived from a nonlinearcomputer model in order to optimize the principal designvariables of main hardpoints Consequently the suspensionmodel was simulated under certain driving conditions withoptimized values and different values of time delay The GAoptimal solutions have been tested andmodification of coeffi-cients was repeated for the elastic elements such as the springstiffness and damper It is necessary that the computer modeland prototype have been obtained to validate effectivenessof the proposed method The simulation and computationalprocedure can be applied to design an optimization problemof any other kind of suspension systems
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this manuscript
Acknowledgments
This research work was supported by International Science ampTechnology Cooperation Program of China (2013DFA31920)the National Key Research and Development Program ofChina (2017YFD0401304) and the National Natural ScienceFoundation of China (Grant no 51476143)
References
[1] M Heidari and H Homaei ldquoDesign a PID controller for sus-pension system by back propagation neural networkrdquo Journalof Engineering vol 2013 Article ID 421543 pp 1ndash9 2013
8 Mathematical Problems in Engineering
[2] C Tan R Xu Z Wang L Si and X Liu ldquoAn improvedgenetic fuzzy logic control method to reduce the enlargementof coal floor deformation in shearer memory cutting processrdquoComputational Intelligence and Neuroscience vol 2016 ArticleID 3973627 pp 1ndash14 2016
[3] D Ozcan U Sonmez and L Guvenc ldquoOptimisation of thenonlinear suspension characteristics of a light commercialvehiclerdquo International Journal of Vehicular Technology vol 2013Article ID 562424 pp 1ndash16 2013
[4] A Seifi R Hassannejad and M A Hamed ldquoUse of nonlinearasymmetrical shock absorbers in multi-objective optimizationof the suspension system in a variety of road excitationsrdquoProceedings of the Institution of Mechanical Engineers Part KJournal of Multi-body Dynamics vol 231 no 2 pp 372ndash3872017
[5] V Savsani V Patel B Gadhvi and M Tawhid ldquoPareto opti-mization of a half car passive suspension model using a novelmultiobjective heat transfer search algorithmrdquo Modelling andSimulation in Engineering vol 2017 Article ID 2034907 pp 1ndash172017
[6] V Mehta M Patel Y Gandhi and B Gadhvi ldquoAn experimentalapproach of estimating speed bump profile to optimizing thesuspension parameters using TLBOrdquo Journal of Advances inVehicle Engineering vol 2 no 2 pp 65ndash74 2016
[7] A Jamali H Shams and M Fasihozaman ldquoPareto multi-objective optimum design of vehicle-suspension system underrandom road excitationsrdquo Proceedings of the Institution ofMechanical Engineers Part K Journal of Multi-body Dynamicsvol 228 no 3 pp 282ndash293 2014
[8] T Tak S Chung and H Chun ldquoAn optimal design softwarefor vehicle suspension systemsrdquo SAE Technical Papers 2000-01-1618 2000
[9] K-H Suh Y-K Lee and H-M Jeong ldquoA study on thehandling performances of a large-sized bus with the change ofrear suspension geometryrdquo SAE Technical Papers 2002-01-30712002
[10] J Park J Yi and D Lee ldquoInvestigation into suspensiondynamic compliance characteristics using direct measurementand simulationrdquo SAE Technical Papers 2004-01-1065 2004
[11] H-S Kim W-J Do J-S Shim and S-R Choi ldquoThe stabilityanalysis of steering and suspension parameters on hands freemotionrdquo SAE Technical Papers 2002-01-0620 2002
[12] S A Mitchell S Smith A Damiano J Durgavich and RMacCracken ldquoUse of genetic algorithms with multiple metricsaimed at the optimization of automotive suspension systemsrdquoSAE Technical Papers 2004-01-3520 2004
[13] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[14] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash3682016
[15] A C Mitra G J Desai S R Patwardhan P H Shirke W MH Kurne and N Banerjee ldquoOptimization of passive vehiclesuspension system by genetic algorithmrdquo Procedia Engineeringvol 144 pp 1158ndash1166 2016
[16] J Yan Z Yin X Guo and C Fu ldquoFuzzy control of semi-active air suspension for cab based on genetic algorithmsrdquo SAETechnical Papers 2008-01-2681 2008
[17] S Hasagasioglu K Kilicaslan O Atabay and A Guney ldquoVehi-cle dynamics analysis of a heavy-duty commercial vehicle byusingmultibody simulationmethodsrdquoTheInternational Journalof AdvancedManufacturing Technology vol 60 no 5-8 pp 825ndash839 2012
[18] K Abdullah W C David and E S Alice ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[19] N Srinivas and K Deb ldquoMultiobjective optimization usingnon-dominated sorting in genetic algorithmsrdquo EvolutionaryComputation vol 2 no 3 pp 221ndash248 1995
[20] R Darvishi M N Esfahany and R Bagheri ldquoNumerical studyon increasing PVC suspension polymerization productivity byusing PSO optimization algorithmrdquo International Journal ofPlastics Technology vol 20 no 2 pp 219ndash230 2016
[21] J Wu Z Luo Y Zhang and N Zhang ldquoAn interval uncertainoptimization method for vehicle suspensions using Chebyshevmetamodelsrdquo Applied Mathematical Modelling vol 38 no 15-16 pp 3706ndash3723 2014
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Mathematical Problems in Engineering
[2] C Tan R Xu Z Wang L Si and X Liu ldquoAn improvedgenetic fuzzy logic control method to reduce the enlargementof coal floor deformation in shearer memory cutting processrdquoComputational Intelligence and Neuroscience vol 2016 ArticleID 3973627 pp 1ndash14 2016
[3] D Ozcan U Sonmez and L Guvenc ldquoOptimisation of thenonlinear suspension characteristics of a light commercialvehiclerdquo International Journal of Vehicular Technology vol 2013Article ID 562424 pp 1ndash16 2013
[4] A Seifi R Hassannejad and M A Hamed ldquoUse of nonlinearasymmetrical shock absorbers in multi-objective optimizationof the suspension system in a variety of road excitationsrdquoProceedings of the Institution of Mechanical Engineers Part KJournal of Multi-body Dynamics vol 231 no 2 pp 372ndash3872017
[5] V Savsani V Patel B Gadhvi and M Tawhid ldquoPareto opti-mization of a half car passive suspension model using a novelmultiobjective heat transfer search algorithmrdquo Modelling andSimulation in Engineering vol 2017 Article ID 2034907 pp 1ndash172017
[6] V Mehta M Patel Y Gandhi and B Gadhvi ldquoAn experimentalapproach of estimating speed bump profile to optimizing thesuspension parameters using TLBOrdquo Journal of Advances inVehicle Engineering vol 2 no 2 pp 65ndash74 2016
[7] A Jamali H Shams and M Fasihozaman ldquoPareto multi-objective optimum design of vehicle-suspension system underrandom road excitationsrdquo Proceedings of the Institution ofMechanical Engineers Part K Journal of Multi-body Dynamicsvol 228 no 3 pp 282ndash293 2014
[8] T Tak S Chung and H Chun ldquoAn optimal design softwarefor vehicle suspension systemsrdquo SAE Technical Papers 2000-01-1618 2000
[9] K-H Suh Y-K Lee and H-M Jeong ldquoA study on thehandling performances of a large-sized bus with the change ofrear suspension geometryrdquo SAE Technical Papers 2002-01-30712002
[10] J Park J Yi and D Lee ldquoInvestigation into suspensiondynamic compliance characteristics using direct measurementand simulationrdquo SAE Technical Papers 2004-01-1065 2004
[11] H-S Kim W-J Do J-S Shim and S-R Choi ldquoThe stabilityanalysis of steering and suspension parameters on hands freemotionrdquo SAE Technical Papers 2002-01-0620 2002
[12] S A Mitchell S Smith A Damiano J Durgavich and RMacCracken ldquoUse of genetic algorithms with multiple metricsaimed at the optimization of automotive suspension systemsrdquoSAE Technical Papers 2004-01-3520 2004
[13] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[14] B Gadhvi V Savsani and V Patel ldquoMulti-objective opti-mization of vehicle passive suspension system using NSGA-IISPEA2 and PESA-IIrdquo Procedia Technology vol 23 pp 361ndash3682016
[15] A C Mitra G J Desai S R Patwardhan P H Shirke W MH Kurne and N Banerjee ldquoOptimization of passive vehiclesuspension system by genetic algorithmrdquo Procedia Engineeringvol 144 pp 1158ndash1166 2016
[16] J Yan Z Yin X Guo and C Fu ldquoFuzzy control of semi-active air suspension for cab based on genetic algorithmsrdquo SAETechnical Papers 2008-01-2681 2008
[17] S Hasagasioglu K Kilicaslan O Atabay and A Guney ldquoVehi-cle dynamics analysis of a heavy-duty commercial vehicle byusingmultibody simulationmethodsrdquoTheInternational Journalof AdvancedManufacturing Technology vol 60 no 5-8 pp 825ndash839 2012
[18] K Abdullah W C David and E S Alice ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[19] N Srinivas and K Deb ldquoMultiobjective optimization usingnon-dominated sorting in genetic algorithmsrdquo EvolutionaryComputation vol 2 no 3 pp 221ndash248 1995
[20] R Darvishi M N Esfahany and R Bagheri ldquoNumerical studyon increasing PVC suspension polymerization productivity byusing PSO optimization algorithmrdquo International Journal ofPlastics Technology vol 20 no 2 pp 219ndash230 2016
[21] J Wu Z Luo Y Zhang and N Zhang ldquoAn interval uncertainoptimization method for vehicle suspensions using Chebyshevmetamodelsrdquo Applied Mathematical Modelling vol 38 no 15-16 pp 3706ndash3723 2014
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom