Embed Size (px)
Citation preview

This article was downloaded by: [Florida Atlantic University]On: 12 November 2014, At: 20:11Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: MortimerHouse, 37-41 Mortimer Street, London W1T 3JH, UK
Intelligent Automation & Soft ComputingPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tasj20
An Intelligent System Based On Adaptive CTBN ForUncertainty Reasoning In Sensor NetworksDongyu Shi a , Xinhuai Tang b & Jinyuan You ba Department of Computer Science and Technology , East China Normal University ,Shanghai , P.R. China E-mail:b Shanghai Distributed Computing Technology Centre Shanghai Jiao Tong University ,Shanghai , P.R. China E-mail:Published online: 01 Mar 2013.
To cite this article: Dongyu Shi , Xinhuai Tang & Jinyuan You (2010) An Intelligent System Based On Adaptive CTBNFor Uncertainty Reasoning In Sensor Networks, Intelligent Automation & Soft Computing, 16:3, 337-351, DOI:10.1080/10798587.2010.10643085
To link to this article: http://dx.doi.org/10.1080/10798587.2010.10643085
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”)contained in the publications on our platform. However, Taylor & Francis, our agents, and our licensorsmake no representations or warranties whatsoever as to the accuracy, completeness, or suitabilityfor any purpose of the Content. Any opinions and views expressed in this publication are the opinionsand views of the authors, and are not the views of or endorsed by Taylor & Francis. The accuracy ofthe Content should not be relied upon and should be independently verified with primary sources ofinformation. Taylor and Francis shall not be liable for any losses, actions, claims, proceedings, demands,costs, expenses, damages, and other liabilities whatsoever or howsoever caused arising directly orindirectly in connection with, in relation to or arising out of the use of the Content.
This article may be used for research, teaching, and private study purposes. Any substantial orsystematic reproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution inany form to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

Intelligent Automation and Soft Computing, Vol. 16, No. 3, pp. 337-351, 2010 Copyright © 2010, TSI® Press
Printed in the USA. All rights reserved
337
AN INTELLIGENT SYSTEM BASED ON ADAPTIVE CTBN FOR
UNCERTAINTY REASONING IN SENSOR NETWORKS
DONGYU SHI1, XINHUAI TANG2, JINYUAN YOU3 1Department of Computer Science and Technology
East China Normal University Shanghai, P.R. China
2,3Shanghai Distributed Computing Technology Centre
Shanghai Jiao Tong University Shanghai, P.R. China
[email protected], [email protected], [email protected]
ABSTRACT—Consisting of various sensing and computing devices deployed in a changing environment, a sensor network’s raw sensed data have many uncertainties. A natural way to deal with them is generating belief messages. Sensing objects continuously change with time, so are their beliefs. Therefore, dynamic models are required to monitor distributed states in the system. This paper presents a CTBN based intelligent system for modeling dynamics and processing uncertainties in sensor networks. Algorithms for message passing and parameter updating for adapting the model to the changing environment are provided. The effectiveness of the system is shown in experiments. Key Words: probabilistic networks; sensor networks; uncertainty reasoning; CTBN; adaptive model; parameter updating
1. INTRODUCTION As a kind of fast developing distributed systems, sensor networks can sense objects, gathering
data in real time, and computing information about them. Sensor nodes are generally low-cost, low-power multi-functional devices that can be easily deployed in the environment. They naturally have many uncertainties in their systems, such as inherent bias, noise from environment, and malfunctions. Sensing objects are always correlated with each other by uncertain, usually probabilistic dependencies. Reasoning under uncertainty to form coherent beliefs is a major task in distributed sensor systems. Sensor networks are much more tightly integrated with the environment than previous distributed systems. The environment naturally keeps changing, and sensing objects often evolve with time. It’s common to require sensor networks to model system dynamics.
In recent years, a series researches have been done in uncertainty reasoning and data fusion in sensor networks by mapping sensor systems or their components to probabilistic graphical models. Most works focus on inference mechanisms, including using loopy belief propagation as a basis for communication in sensor networks[1], robust distributed inference architecture[2, 3], inference in dynamic systems[4], nonparametric belief propagation for highly non-Gaussian uncertainty reasoning tasks[5], and re-weighted belief propagation for more robust and efficient message
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

338 Intelligent Automation and Soft Computing
passing[6] in sensor networks. In research of theoretical graphical models, the development of dynamic probabilistic networks, especially continuous time Bayesian networks (CTBN)[7] and asynchronous dynamic models[8] make monitoring sensor network dynamics possible. The research in graphical models for uncertainty reasoning and data fusion in sensor networks “has shown its promise, and will offer more for the future[9]”.
In this paper we present an intelligent system that uses a dynamic probabilistic network for reasoning and monitoring uncertainties in sensor networks. We present static and dynamic structure for dependency relationships of distributed sensing objects and sensor data. The dynamic behavior modeling is based on CTBN. A message passing algorithm for belief generating and updating is offered for inference in the system. A parameter update method is also provided to adapt the system to the changing environment. The rest of the paper is organized as follows: Section 2 introduces CTBN. Section 3 describes uncertainty processing and static modeling in a sensor network. Section 4 gives a dynamic model based on CTBN, with its problems and solutions. The message passing algorithm and adaptive method are also presented in this section. Section 5 is the experimental results, and section 6 draws the conclusion.
2. CONTINUOUS TIME BAYESIAN NETWORK Continuous Time Bayesian Network [7, 10, 11] is a framework that represents a stochastic
process over a structured state space evolving in continuous time. It is a dynamic model over a set of variables X . It consists of two components: an initial distribution specified as a Bayesian network over X , and a continuous transition model specified using a directed (possibly cyclic) graph of X . Each X ∈ X is associated with a conditional intensity matrix.
CTBN is based on the homogeneous Markov process. In this process, a variable begins in a certain state, stays in that state for a random amount of time, and then transits to another state. Transitions can happen at any time point. The amount of time the variable stays in a particular state is exponentially distributed. The dynamics of the process are characterized by an N N× intensity matrix Q . The diagonal entries control the rate at which the process leaves a state, and the off-diagonal entries of Q describe the transition probabilities between states. The conditional distribution over the value of X at time t given the value at an earlier time s is:
( ( ) | ( )) exp( ( )), forXP X t X s t s s t= −Q < (1)
In a CTBN, the joint dynamics of the local variables are modeled by allowing the transition model of each local variable X to be a Markov process. Its parameterization depends on X ’s parents – a set of variables U in the graph. The key building block is conditional Markov process. A conditional Markov process is an inhomogeneous Markov process whose intensity matrix varies with time, but only as a function of the current values of a set of discrete conditioning variables. Its intensity matrix , called conditional intensity matrix (CIM), can be viewed as a
set of homogeneous intensity matrices: |XQ U
1 1 1 2 1
2 22 2 1
1 2
…
…
…
N
N
N N N N N
x x x x x x
x xx x xX
x x x x x x x
q q q
q q q
q q q
θ θ
θ θ
θ θ
⎛ ⎞⎜ ⎟| | | |⎜ ⎟⎜ ⎟⎜ ⎟
1
2
x
x x
|
| || |⎜ ⎟| = ⎜ ⎟
⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟| | | | |⎝ ⎠
− ⋅ ⋅
⋅ − ⋅=
⋅ ⋅ −
u u u u
u uu uu
u u u u u
Q U|
u
u (2)
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

An Intelligent System Based on Adaptive CTBN for Uncertainty Reasoning in Sensor Networks 339
where is the parameter of exponentially distributed time that 0ixq | >u X stays in state ix ,
is the probability of destination state ,i jx xθ |u j i≠ jx , and 1
i jx xjθ | =∑ u . A CTBN is formed by
combining sets of conditional Markov processes of all variables. The transitions of each local variable in a CTBN are controlled by the values of its parents. The conditional distribution over X at time given its parents U at time t s can be calculated as:
( ( ) | ( )) exp( ( )), forX|P X t s t s s t= −Q UU <
}
(3)
Algorithms have been developed for learning CTBN[10, 12] using training data described as trajectories. Suppose there is a set of trajectories 1{ HD σ σ= ,..., , where each iσ is a set of state transitions and the time when the transitions occur. The likelihood of can be decomposed as a product of the likelihoods for individual transition
Dd id dd x t x σ=< , , >∈′ , where X transits to
state dx′ after spending the amount of time in state dt dx . Data can be summarized in terms of the sufficient statistics: , the amount of time
D[T x | u] X spends in state x ; , the
number of times [ ]x′, | uM x
X transitions from x to x′ ; and [ ]x
M x′
[x x ]M ′| = , |∑u u , the total number of
transitions that X leaves the state x . A CIM’s log-likelihood is the sum of log-likelihoods in the following:
( ) ( [ ]ln( ) [ ]) [ ]ln( )X x xx x x x
L q D M x q q T x M x xθ θ ′xx| | |′≠
′, : == | − ⋅ | + , |∑∑ ∑∑∑u uu u
u u u u (4)
If all the trajectories are full observation, the parameter learning algorithm[10] based on maximum likelihood estimation (MLE) is:
[ ] [;[ ] [ ]x xx
M x M x xqT x M x
θ ′| |
]′| , |= =
| |u uuu u
u (5)
3. UNCERTAINTY PROCESSING IN SENSOR NETWORK
Uncertainties in a sensor network are distributed physically, and are correlated to each other. The relationships among sensing objects and sensor data in different areas can be mapped to a graphical model. The model’s structure depends on the architecture of the sensor system. Generally, a sensor network has the following functions: sensing, computation, storage, communication, and power supply[13, 14]. That’s why a general design - the Hourglass architecture[15], envisions 4 kinds of nodes: sensor nodes, data nodes, communication nodes and processing nodes. We mainly consider uncertainty reasoning, so three kinds of nodes are explicitly represented in our system: 1) Sensor nodes are deployed separately in different sub-areas, and responsible for collecting raw sensed data, such as temperature, humidity, stress, acidity, etc. They give evidence to the graphical model. Sensor nodes could be broken. They only communicate with the processing node in local system in the sub-area. 2) Processing nodes are responsible for computation, data storage, and communication. Here the sensing area is divided into a series of sub-areas. Each sub-area has a local system with a processing node examining a set of sensor nodes. They generate beliefs from sensor readings, and propagate them. 3) The central management node surveils the sensor network system. It obtains knowledge from
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

340 Intelligent Automation and Soft Computing
processing nodes, provides training data if required, and interacts with user of the system. Figure 1 is an example of the sensor network architecture in this paper.
Figure 1. The architecture of a sensor network.
Two kinds of knowledge are represented in our system by different variables. One shows the main cause of the sensor readings. Usually it’s an event, such as a fire or an earthquake. It is the main object that the sensor network surveils, and represented by what we call O-variable. The other shows the syndrome of this event, such as the level of temperature, the level of humidity, or synthesis of different measurements. It’s represented by S-variable, and directly related to the local sensor data. In every subsystem, there’s a sub-model consisted by an O-variable, an S-variable, and a bunch of sensor readings as evidence. The state of the S-variable is affected by the states of the local O-variable and the O-variables in the neighboring subsystems. A sub-model is running in a processing node. All sub-models in all processing nodes form the whole probabilistic network. Figure 2 shows an example of the model’s static structure among 3 processing nodes. Figure 3 shows the whole model structure running in the sensor network of Figure 1. We’ve studied the static model in [16], and presented a DSPN (Distributed Static Probabilistic Network) model for a simulated fire-detection sensor network.
4. MODELING DYNAMICS IN SENSOR NETWORK In order to model the dynamics of uncertainties in a sensor network, we have to use dynamic
probabilistic models, such as standard dynamic Bayesian networks (DBN)[17]. But DBN has to granulate time to equal slices in order to make the process first-order Markov and time invariant. That leads to synchronization in every step of all sub-systems. We’ve tried to establish a DBN-based model, called DDPN(DBN based distributed probabilistic networks). It results to high cost for the least precise modeling, and does not work for large scale networks. So we consider basing our model on CTBN. The idea of using CTBN to model asynchronous dynamic behavior is first introduced in [8]. It uses bidirectional edges between every pair of linked variables. Bidirectional model is also called CTMN[18]. Although inspired by the idea of using CTBN, our system is not necessary to have bidirectional edges. But there’re some significant topics that must be covered when modeling dynamics by CTBN in a sensor network.
4.1 Modeling Distributed Uncertainties Based on CTBN Suppose there is a local sensor system with a processing node and a set of sensor nodes. The
local system does not consider the effect of other local systems. The relationships of the O-variable and the S-variable in the processing node can be modeled as a CTBN. It has two conditional Markov processes. Figure 4 shows the structure.
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

An Intelligent System Based on Adaptive CTBN for Uncertainty Reasoning in Sensor Networks 341
Figure 2. Static probabilistic network model in neighboring processing nodes.
Figure 3. DSPN for network structure in Figure 1.
Figure 4. Modeling a single local system as a CTBN.
There is one conditional intensity matrix (CIM) for each conditional Markov process. Let represents the CIM of the O-variable, and represents the CIM of the S-variable
conditioned on its parent - the O-variable. According to equation(1) and equation(3), we have OQ |S OQ
'( | ) exp( ( ')), for 't tOP O O t t t t= −Q < (6)
'|( | ) exp( ( ')), for 't t
S OP S O t t t t= −Q < (7)
where is the latest update time point before . 't tThe variables generated at a point of time are temporal variables, including temporal O-
variable (tov) and temporal S-variable (tsv). The belief updating process is similar to running loopy belief propagation (LBP) in a standard DBN[19], except that in this model, the temporal variables are generated in unequally divided time slices. The update time point depends on local sensor data, but not on fixed time increments.
Basically, the dynamics of the whole network model is based on the same method as the above model in a single processing node, using CTBN to obtain conditional probability distribution (CPD) in unfixed time increments. But there are significant differences when single node models are connected. Firstly, every tsv has multiple parents. They are one tov in local and one tov in each neighboring processing node, all generated before it. These tovs are not generated at the same time. It’s possible that the corresponding O-variables change their states when the tovs are generated. To avoid too much computational complexity, we make an approximation that the tovs keep their values during the period between two tsvs are generated. If a non-local parent is
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

342 Intelligent Automation and Soft Computing
generated before the local parent, or if it doesn’t change state when generating, the modeling is exact. Even if a non-local parent that generated after the local parent actually changes its state, the modeling is still acceptable if local update frequency is high enough comparing to the state changing. After all, a local parent has the most effect on a local child. Same approximation has made in[8]. Thus, according to equation(3) we have
(8) '|( | ) exp( ( ')), for 't t
S UP S U t t t t= −Q <
where are parents of - the tsv at the time t ; is the latest local update time point before t ;
1' '{ , ,..., }Mt tt tU O O O={ ,U O
tS 't
1,..., }MO O= are parents of the S-variable in the CTBN; is the
CIM of conditioned on U . is the same as equation (6). |S UQ
S '( |t tP O O )The second problem is multiple children. Unlike the tsvs have fixed number of parents, the
tovs’ children are not fixed. Every tov has two children in local, one tov and one tsv at the next update time point. But how many children it has in a neighbor is not fixed. Since different processing nodes have different computational capabilities, and are in different situations, the update rates are different. A tov may have zero or multiple children in one neighbor. Figure 5 shows an example between two neighboring processing nodes. The tsvs in node i at and both find that the most recent tov in node is at , so they are both children of it. But the tov in node i at has no child in node , because at the nearest update point of node after (that’s
), the tsv in finds out that the most recent tov in its neighbor is at .
3t
3t
4tj 2t
3t j j
5t j 4t
Figure 5. The structure of the dynamic model between two neighboring nodes.
Thus, it leads to the third problem – when and how a processing node updates. According to the second problem, this is important not only because it affects the parameters - and
, but also because it affects the model’s dynamic structure. Two conditions should be the premises of an update. The first is when local evidence shows a relatively high possibility of state changing or a sensitive state persisting. The effect of local evidence can be calculated as:
'( | )t tP O O'( | )t tP S U
( | ) ( | )i iS
S y Pφ = ⋅ y S∏∑y (9)
where is the set of local sensor data; S is the S-variable. The probability form of local evidence effect on the S-variable is the normalization of
{ }iy=y( | )Sφ y .
The other condition is when belief messages from at least one neighbor arrive. Belief messages are supposed to be propagated in the sensor network through processing nodes, and update their variables’ beliefs. The moral graph (undirected graph after moralization, see[20]) of the model has loops. So LBP is the basis for belief propagation in the system. Although LBP is an approximate method, theoretical analysis[21, 22] and experimental results[23] have shown its strong performance, which makes it a leading approximate inference method.
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

An Intelligent System Based on Adaptive CTBN for Uncertainty Reasoning in Sensor Networks 343
Belief propagation in the network leads to the fourth problem – organization of the belief messages. In the network model, different temporal variables at different time points send different belief messages to other temporal variables in neighborhood. If they send messages by themselves, it would be a mess to all the hosting processing nodes and communication systems. Here messages are packed before propagation in the network. When a processing node is ready to send messages to one of its neighbors, it collects all messages that should sent to this neighbor by its temporal variables, each with a time-stamp and a receiver’s id, and put them into a package. After that it sends the package to the neighbor. When the neighboring processing node receives the package, it dispenses different messages to different local temporal variables according to the information of time-stamps or receivers.
Message packing is very critical to the system not only for orderly message passing, but also for the feasibility of the whole modeling. This is because of the second problem – the unfixed children number of a tov in its neighbor. When a processing node updates, a new set of temporal variables is generated. The new born tov does not know how many children it has in any of its host’s neighbor. So it sends one belief message to each of the neighbors, and then waits for the back messages to see how many children it has in each neighbor. If every temporal variable sends message by itself, the new tov will never assure of its children number, because it never knows whether it will get another back message later. That will make the model infeasible. But if message are packed, when the host receives a package from a neighbor, all the messages from children are in it. The tov can check how many back messages it gets to know its children. If a neighbor returns more than one messages, it knows that it has multiple children in this neighbor, and will keep communicating with them. If no back message is in the package, it knows that no child is in this neighbor, and won’t send message to it again.
As the dynamic model keeps running, it will generate infinite number of temporal variables. Since the storage of a processing node in a real sensor network is limited, it can not keep too much variables running. Every variable has to be stopped updating after some time. In practice, keeping temporal variables at several latest time points is enough. There’s the last problem - when to stop the propagation. According to the two conditions for belief update, once a message package is sent out, belief messages will flood in the system, and keep propagating forever. To avoid wasting resources, we decide that if an update is not triggered by local sensor data, and if beliefs of all the temporal variables show they are not likely in sensitive states, a processing node does not send out messages. We call this model DCTPN (distributed continuous time probabilistic network)
4.2 The Algorithm for Message Passing The algorithm we presented for message passing with inference has two related parts:
message organization and belief computation. Here, computation, communication and data storage are all viewed as functions of processing nodes in the system. There’re two logical modules, each for communication and computation. Suppose a processing node has M neighbors, and keeps set of temporal variables. According to the general LBP method[22, 24], every parent in the model sends a
N
π message to each of its children, and every child sends a λ message to each of its parents. Let and represent the tov and tsv in a processing node at time point respectively, we present an algorithm for their message passing with belief update.
nO nS nt
In communication module, messages are organized as following: While latest-update is not over Wait for new message package; If a new message package from neighbor m arrives r-pack[m]= new message package; new-r-pack=T;
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

344 Intelligent Automation and Soft Computing
End End // send message package For m=1 to M For n=1 to N If not has , Wait; ( )
n
nS mOλ ,{ ( )
n
nO m jSπ }
Else put them into s-pack[m], labeled with update time stamp; End Send s-pack [m] to neighbor m; End // prepare for update While new-r-pack=F AND local_update=F Wait for new message package; If a new message package from neighbor m arrives r-pack[m]= new message package; new-r-pack=T; End End Unpack all r-pack[m] to get messages ( )n
mnO
Sπ and ,
{ ( )nm j
nSO }λ from every neighbor;
new-r-pack=F; ( )
n
nS mOλ and ( )n
mnO
Sπ are belief messages exchanging between and its parent in
neighbor m; and nS n
mO
,( )nO m jS
nπ
,( )n
m jnS
Oλ are belief messages exchanging between and its th
child in neighbor m. Figure 6 shows different types of belief messages in the model.
nO j
,nm jS
In computation module, beliefs are updated as following (notes: is the new time point of update; is the latest time point that the temporal variables do not update any more. We use
to label the time points for simplicity. Bel() is the belief function of a variable, that is, the probability distribution of its state.
Nt
0t. }{0..n N∈
sα , oα , 1sα , 2sα , 1oα , 2oα , 3oα , 4oα , Nα are normalization factors. The messages propagated locally in the processing node are stored for next update usage if not being used in this one):
When running this algorithm, beliefs of the variables will approach the actual distributions after several times of updates (iterations). Note when a new tov is generated, the only belief message it get is from the last time local tov. Current local evidence and latest beliefs from neighbors do not have direct effect on it. This may cause slow convergence, and may affect the sensitivity of the system, especially when update rate is not high enough. To improve this situation, a prior distribution is set to a newly generated tov based on the belief of local tsv and a predefined CPD - ( | )S Oϕ :
Bel( ) ( | )Pr( )Bel( ) ( | )
N
NN
NO
S S OOS S Oϕϕ
⋅=
⋅∑ (10)
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

An Intelligent System Based on Adaptive CTBN for Uncertainty Reasoning in Sensor Networks 345
Figure 6. Belief messages in DCTPN for a processing node
Obtaining local sensor data to compute ( | )Sφ y using equation(8), and normalize it to get CPD ; ( )P SIf or 1|| ( ) Bel( ) ||NP S S distance−− > ( _ )P S sensitive state threshold= > local_update=T; prop=T; Else local_update=F; prop=F; End Wait till belief messages from communication module arrive; Record every 1
,Nm jS − from a neighbor m that has a 1
,1(N
m jNS
O )λ − − message sent to ; 1NO −
Label the latest π messages from each neighbor m ( )Nm
NOSπ , and record the senders ; N
mOBegin update
1 1( | ) exp( ( )N N O N NP O O t t− −= −Q ) 1 |( | ) exp( ( ))N N S U N NP S U t t− −; 1= −Q ;
( | )N NSφ y = ( | )Sφ y ;
10
1 10 1
1 1 0 1, ,...,
( ) ( | ) ( ) ( )m
M
O OmO O O
S P S U Sπ π= ∑ ∏ 1Sπ
)
;
1 1 1 1 1 1 1 1Bel( ) ( ) ( ) ( ) ( |S S S S Sα π λ α π φ= = y ; For n=2 to N
; 1
1 1
1, ,...,
( ) ( | ) ( ) ( )nn mn nn M
n n n O n OmO O O
S P S U Sπ π−
−
−= ∑ ∏ nSπ
n ( ) ( | )n nS Sλ φ= y ; 1
1 1,...,
( ) ( | ) ( |n
n nn M
S n s n n n nS O O
O S P Sλ α φ− −= 1)U∑ ∑y ;
For m=1 to M 1 1
2 1,..., \
( ) ( | ) ( | )n
n n nn n M m
nS m s n n n n
S O O O O
O S P Sλ α φ−
−= U∑ ∑y ;
Bel( ) ( ) ( )n s n nS S Sα π λ= ;
If prop=T; ( _ )nP S sensitive state threshold= > ;
21 1 2( ) ( | ) (nn n n OO P O O Oπ π−− − −= 1)n−
1)− 1,
1 1 1,
( ) ( ) ( ) (nn n m j
n O n S n nSm j
O O O Oλ λ λ λ −− − −= ∏ ;
11 ,
1 1 1,
( ) ( ) ( ) ( )nn n m j
O n o n S n nSm j
O O O Oπ α π λ λ −− − −= 1−∏ ;
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

346 Intelligent Automation and Soft Computing
11 ,
2 1 1,
( ) ( ) ( ) ( )nn n m j
O n o n O n nSm j
S O O Oπ α π λ λ −− − −= 1−∏ ;
For m=1 to M; j=1 to J 1
1 ,
1, 3 1 1 1
, {1... }\
( ) ( ) ( ) ( ) ( )nn n n m k
nO m j o n O n S n nS
m k K j
S O O Oπ α π λ λ λ −−
−− − −
=
= 1O −∏ ;
End ;
1
1
2 4( ) (n
n
O n o nO
O Oλ α λ−
−
− −= ∑ 1) OBel( ) ( ) ( )n o n nO Oα π λ= ;
If prop=T; ( _ )nP O sensitive state threshold= > End ( )NOλ = 1 ; 1( )
NO NOλ − = 1 *;
1 1 ,( ) ( ) ( ) Bel( ) (N N N
NO N O N O m j N N NO S S Oπ π π α π+ += = = = )O *;
If prop=F Stop propagation and wait; Else put to communication module; , 1... ; 1...{ ( ), ( )}
n n
n nS m O m j n N m MO Sλ π = =
Re-label each to ; n 1n −End
So the last part of the above algorithm (the * formula) can be modified as:
1( ) Pr(NO N NO Oλ − = )
)O
;
1 1 ,( ) ( ) ( ) Bel( ) Pr( ) (N N N
NO N O N O m j N N N NO S S O Oπ π π α π+ += = = = ;
The algorithm is running in every processing node independently. For the whole system, it is a distributed algorithm. Processing nodes may be broken in the distributed system, especially when they are bound with sensory equipments with limited power. This algorithm can still run when a node’s neighbor is broken. It only has to use the old belief messages from the neighbor. If a processing node is removed from the network permanently, or if a new node is deployed, the whole model’s static structure is changed. In this case, the s in the related nodes have to be renewed to keep modeling dynamics and propagating beliefs.
|S UQ
4.3 Adaptive process of the model So far we have developed a CTBN-based distributed model for uncertainty reasoning in
sensor network. But the model itself needs to update its parameters to be adaptive. One reason is that it seldom has enough information to get precise parameters at the beginning. But more important reason is that the environment of sensor network is changing, which makes the quantitive dependent relations among sensing objects change. And that leads to new values of parameters. Since the model is based on CTBN, whose parameters are a set of CIMs, what we need to do is to update the CIMs according to new evidence data of trajectories.
Our work in [25] has established update rules for CTBN. Suppose there are training data and a current model with parameters
D(q )ρ θ= , , our task is to construct a new model ( )qρ θ= ,
based on (q )θ, and . Similar to the framework in [26] and [27], the choice of D ρ should balance two factors: the potential increases to the log-likelihood of the data sets in the current parameters, and the extent to which it moves away from the current model. The update is achieved by the following maximization:
arg max[ ( )] arg max[ ( ) ( )]XF L D dρ ρ
ρ ρ η ρ ρ ρ= = : − , . (11)
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

An Intelligent System Based on Adaptive CTBN for Uncertainty Reasoning in Sensor Networks 347
0η > is the learning rate. The term (XL D)ρ : is the normalized log-likelihood of D , computed by equation(4). The term (d )ρ ρ, is an estimate of the distance between the new and old models. The two parameter vectors ρ and ρ , with the associated network structure and transition process model, define two probability distributions over the same space of the variables in the CTBN (CIM). We use KL distance to compute (d )ρ ρ, . Its effect is to keep ρ close to ρ . According to our work in [25], the maximization gets the following result:
2[ ] 1 ( [ ] 1) 4 [ ]
2 [ ]x
x
M x M x T x qq
T xη η η
η|
|
| − + | − + |=
|u
u
u uu
u (12)
'|
'|
[ '| ]
'|'| [ '| ]'|'
xx
xx
M xx
xxxx M xxxxx
ee
η θ
η θθθθ
/
/= ⋅∑
u
u
u
uu uu
(13)
If , [ | ] 0M x =u |xq u remains the old value; if [ ' | ] 0M xx =u , '|xxθ u remains the old value. Otherwise the new values are just computed by the two functions. Following [26], we call it EG(η ) algorithm.
There are two kinds of CIMs in the system: and . Since both O-variables and S-variables’ evolvement are affected by the changing environment, both kinds of the CIMs that describe the evolvement have to be updated. To adapt the model, new sets of transitions
from sensing the environment are required. We use feedback method to get the transition data. Generally, when a variable’s computed belief shows a high possibility of state transition, its host processing node reports to the central management node, and store the belief information with a time stamp in itself. The central node is supposed to check whether the state is really changed if it’s surveilling the sensor network. It may send the result back to the processing node. Then the node can use this information to form training trajectories. Every processing node stores such information for a few times, and exchanges them with its neighbors. Then the sufficient statistics can be calculated, and the CIMs’ parameters can be updated according to the EG(
OQ |SQ U
dd dd x t x=< , , >′
η ) algorithm. There’s a discussion about the learning rate η . If η approaches 1, the old values of the
parameters are weighted less. The update is based more on the present data. If it approaches 0, the effect is reverse. So if the parameters are very coarse at the beginning, η will not be a fixed constant. We can let it be near 1 at the beginning, so as the update being more affected by training data, and decrease it to be near 0, after parameters become well learned.
The MLE method can also be applied to update parameters if summations of all the sufficient statistics are kept in the system. If the model’s parameters are fixed, MLE is an exact algorithm, and should work better than EG(η ) for the history information it keeps. But in a changing environment where parameters are not fixed, EG(η ) often works better to track the actual values of the parameters. Summation of history data usually drag the parameters from changed values. We should carefully choose the method. Further theoretical analysis is required for EG(η ) in CTBN.
5. EXPERIMENTS We take our experiments on a distributed sensor system, using processing nodes connected as
the structure in Figure 1. The event to detect is vapor leakage, and the sensor readings are humidity data with bias and disturbance. The O-variable representing the event happening has two
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

348 Intelligent Automation and Soft Computing
states: true and false; the S-variable representing the measurements has five levels; the sensor readings are continuous real values. So the CTBN parameters stored in each processing node are
of a CIM, and of CIMs, where OQ 2 2× |S OQ 12M + 5 5× M is the number of neighbors. Each processing node keeps 6-8 sets of temporal variables. So the whole storage also includes CPDs for each sensor, CPDs for every tov and tsv, the dynamic structure among them (parents and children), and the messages for belief propagation.
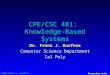
We first examine the effectiveness of the message passing algorithm in the system. Figure 7 shows the average belief changing of the O-variable (state of true) and S-variable (state of high levels) in a nearby processing node as vapor leakage occurring in the sensing area. It can track the event dynamically. It also compares the algorithm with and without set priors of tov. In Figure 7(a), it’s uniform priors, and the changing of O-variable delays comparing to the S-variable. In Figure 7(b), it’s set priors computed by equation (9), and the changing of O-variable is more sensitive, coinciding with the S-variable.
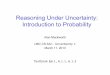
Then we compare the performance of DCTPN to the former static model DSPN. Figure 8(a) shows the beliefs of O-variables. It’s the fourth newest tov in DCTPN comparing to the eight times iteration O-variable in DSPN. It shows that DCTPN is more sensitive to the event, and tracks the continuous evolvement. The accuracy of static model lies in iteration, while the accuracy of DCTPN lies in update frequency. DCTPN is also compared to the DBN-based model DDPN. Since it’s a small scale test, synchronization in equal time slice can be realized. Figure 8(b) shows the log-likelihood of all the nodes in the network. Both of the models use the third newest tov. DCTPN reacts more accurately than DDPN. It updates more frequently when entering sensitive states.
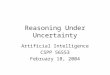
Other experiments show the adaptive process of the model with parameter update algorithm. Two update methods – MLE and EG(η ) for CTBN are compared. At first, the actual values of the parameters are fixed. The initial parameters are far from the actual values. Figure 9(a) shows that both methods approach the actual parameters. MLE is faster than EG(η ). In another case, the actual parameter values changed. As in Figure 9(b), EG(η ) approaches the new values faster, while MLE changes slowly from history data. Figure 9(c) shows the effects of adaptive process on performance of the model.
(a) (b)
Figure 7. The belief changing of different variables in DCTPN: (a) message passing with uniform priors; (b) modified message passing with set priors.
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

An Intelligent System Based on Adaptive CTBN for Uncertainty Reasoning in Sensor Networks 349
(a) (b)
Figure 8. Performance of DCTPN compared to: (a) DSPN; (b) DDPN.
(a) (b)
(c)
Figure 9. Adapting model by update parameters (a) The model’s parameters are fixed; (b) The model’s parameters are changed; (c) The effects of the adaptive process.
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

350 Intelligent Automation and Soft Computing
6. CONCLUSION This paper has presented an intelligent system using a distributed adaptive probabilistic
network model to generate belief messages from data containing uncertainties in sensor networks. The model is based on conditional Markov process theory of continuous time Bayesian networks. It can work asynchronously in a sensor network that every processing node in the system updates its beliefs whenever necessary. Comparing to the former static model, it is dynamic, and reflects the beliefs of states in continuous time. Comparing to the traditional dynamic models it avoids equal time granularity and synchronization problem. This makes it suitable for large scale distributed systems. A thorough algorithm for message passing is developed to deal with the challenges from dynamic modeling in distributed systems, including structure of temporal variables, their belief updates, and message organizations. To adapt the model to the changing environment, a method is presented to update the model’s parameters. It takes a balance between the existing model and new data samples. The performance of the system is shown in experiments. Our future work includes developing more efficient message passing algorithms, further analysis and improvement of the parameter update and model adaptive process, and applying the model to larger sensor networks and other distributed systems.
REFERENCES 1. C. Crick and A. Pfeffer, "Loopy belief propagation as a basis for communication in sensor networks,"
UAI, 2003. 2. M. Paskin and C. Guestrin, "Robust probabilistic inference in distributed systems," UAI, 2004. 3. M. Paskin, C. Guestrin, and J. McFadden, "A Robust Architecture for Distributed Inference in Sensor
Networks," IPSN, 2005. 4. S. Funiak, C. Guestrin, M. Paskin, and R. Sukthankar, "Distributed Inference in Dynamical Systems,"
NIPS, 2006. 5. A. T. Ihler, J. W. Fisher, R. L. Moses, and A. S. Willsky, "Nonparametric Belief Propagation for
Self-Localization of Sensor Networks," IEEE Journal on Selected Areas in Communications, 23(4), 2005.
6. J. Schiff, D. Antonelli, A. G. Dimakis, D. Chu, and M. J. Wainwright, "Robust Message-Passing for Statistical Inference in Sensor Networks," IPSN, 2007.
7. U. Nodelman, C. R. Shelton and D. Koller, "Continuous time Bayesian networks," UAI, 2002. 8. A. Pfeffer and T. Tai, "Asynchronous dynamic Bayesian networks," UAI, 2005. 9. M. Cetin, L. Chen, J. W. Fisher, A. T. Ihler, R. L. Moses, M. J. Wainwright, and A. S. Willsky,
"Distributed Fusion in Sensor Networks - A graphical models perspective," IEEE Signal Processing Magazine, 23(4), 2006.
10. U. Nodelman, C. R. Shelton, and D. Koller, "Learning continuous time Bayesian networks," UAI, 2003.
11. K. Gopalratnam, H. Kautz, and D. S. Weld, "Extending continuous time Bayesian networks," AAAI, 2005.
12. U. Nodelman, C. R. Shelton, and D. Koller, "Expectation maximization and complex duration distributions for continuous time Bayesian networks," UAI, 2005.
13. I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, "A survey on sensor networks," IEEE Communications Magazine, 40(8), 2002.
14. M. Tubaishat and S. Madria, "Sensor networks: an overview," IEEE Potentials, 22(2), 2003. 15. J. Shneidman, B. Choi, and M. Seltzer, "Collecting data for one hundred years," Harvard University,
2002. 16. D. Shi and J. You, "Building probabilistic network model for uncertainty knowledge in sensor
networks," ICSCA, 2006. 17. T. Dean and K. Kanazawa, "A model for reasoning about persistence and causation," Computational
Intelligence, 5, 1989.
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14

An Intelligent System Based on Adaptive CTBN for Uncertainty Reasoning in Sensor Networks 351
ineering.
gent computing.
18. T. El-Hay, N. Friedman, D. Koller, and R. Kupferman, "Continuous Time Markov Networks," UAI, 2006.
19. K. Murphy, "Dynamic Bayesian Networks: Representation, Inference and Learning," UC Berkeley, 2002.
20. M. I. Jordan, "Graphical Models," Statistical Science, 19, 2004. 21. S. M. Aji and R. J. McEliece, "The generalized distributive law," IEEE Transactions on Information
Theory, 46(2), 2000. 22. J. Yedidia, W. Freeman, and Y. Weiss, "Understanding belief propagation and its generalizations,"
Exploring Artificial Intelligence in the New Millennium, Morgan Kaufmann, 2003. 23. K. Murphy, Y. Weiss, and M. I. Jordan, "Loopy belief propagation for approximate inference: an
empirical study," UAI, 1999. 24. J. Pearl, Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference, Morgan and
Kaufmann, 1988. 25. D. Shi and J. You, "Update rules for parameter estimation in continuous time Bayesian network,"
PRICAI, 2006. 26. E. Bauer, D. Koller, and Y. Singer, "Update rules for parameter estimation in Bayesian networks,"
UAI, 1997. 27. I. Cohen, A. Bronstein, and F. G. Cozman, "Adaptive Online Learning of Bayesian Network
Parameters," HP Laboratories, Palo Alto, CA, 2001.
ABOUT THE AUTHORS D. Shi received his PhD degree in Computer Science Department in Shanghai Jiaotong University. He is now an assistant professor in Computer Science Department in East China Normal University. His major interests are probabilistic graphical models, uncertainty reasoning, machine learning in distributed environments and sensor data processing.
X. Tang received his M.E. degree and Ph.D degrees in 1995 and 2005. As an assistant professor, he is deputy director of Shanghai Distributed Computing Technology Centre, Shanghai Jiaotong University. His research interests include distributed computing, mobile computing, sensor networks, and software eng
J. You is a professor in Computer Science Department in Shanghai Jiaotong University. He is the director of Shanghai Distributed Computing Technology Center. He is a director of Shanghai Computer Society, and a council member of China Computer Federation. His research areas are system software, distributed computing, and intelli
Dow
nloa
ded
by [
Flor
ida
Atla
ntic
Uni
vers
ity]
at 2
0:11
12
Nov
embe
r 20
14