Embed Size (px)
Citation preview
ANALIZA MECHANIZMU DŹWIGNIOWEGO
1. Synteza strukturalna i geometryczna mechanizmu
1. 1. Budowa łańcucha kinematycznego – schemat ideowy.
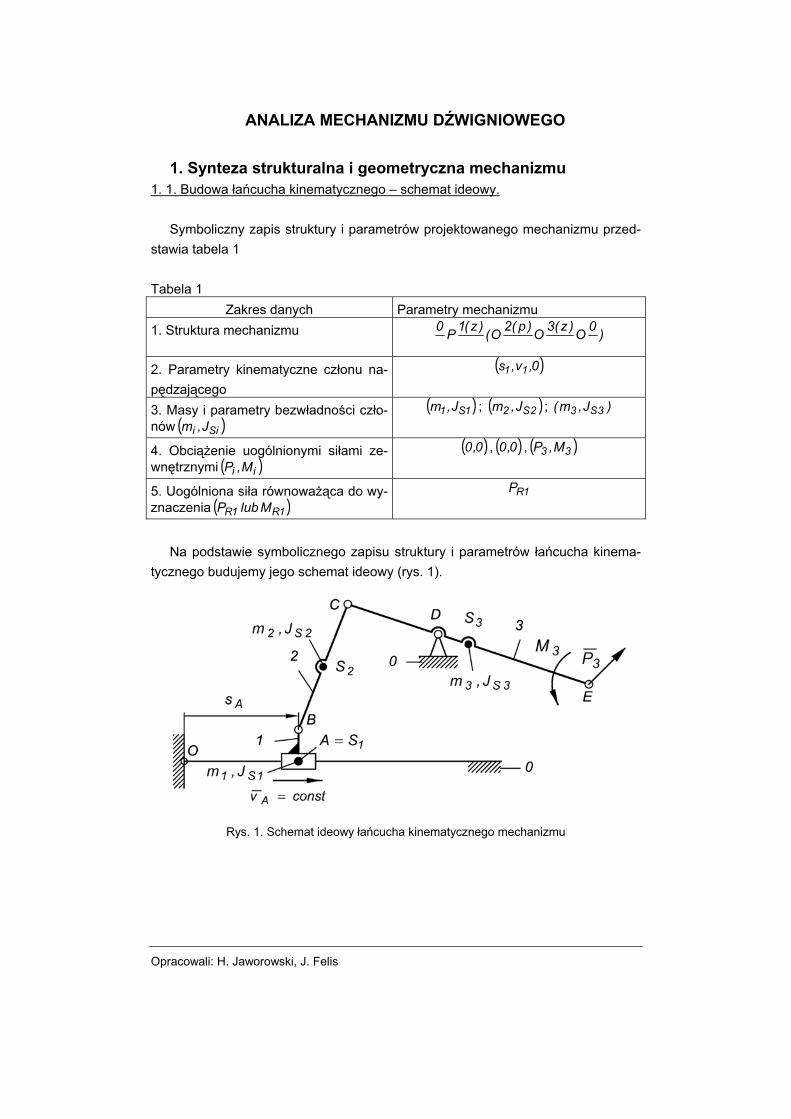
Symboliczny zapis struktury i parametrów projektowanego mechanizmu przed-stawia tabela 1 Tabela 1
Zakres danych Parametry mechanizmu 1. Struktura mechanizmu )0O)z(3O)p(2O()z(1P0
2. Parametry kinematyczne członu na-pędzającego
( )0,v,s 11
3. Masy i parametry bezwładności czło-nów ( )Sii J,m
( )1S1 J,m ; ( ) ; ( 2S2 J,m )J,m 3S3
4. Obciążenie uogólnionymi siłami ze-wnętrznymi ( ) ii M,P
( )0,0 , , ( )0,0 ( )33 M,P
5. Uogólniona siła równoważąca do wy-znaczenia ( )1R1R MlubP
1RP
Na podstawie symbolicznego zapisu struktury i parametrów łańcucha kinema-
tycznego budujemy jego schemat ideowy (rys. 1).
Rys. 1. Schemat ideowy łańcucha kinematycznego mechanizmu
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 2
1. 2. Ruchliwość i klasa mechanizmu
Ruchliwość mechanizmu w (1) 45 pp2n3 −−=liczba członów ; liczba par kinematycznych klasy 4, ; 3n = 0p4 =liczba par kinematycznych klasy piątej ; ( ) 4p5 = ( ) ( 0,3;3,2;2,1();1,0 ) w 14233 =⋅−⋅=
Klasa mechanizmu
Po odłączeniu członu napędzającego pozostałe człony1 2 i 3 tworzą grupę strukturalną.
Grupa (2,3)
człon napędzający 1
Rys. 2. Ruchliwość i klasa mechanizmu Badamy ruchliwość grupy strukturalnej po połączeniu jej członów ruchomych z podstawą (rys. 2): 2n = ; ; 3p5 = ( ) ( ) ( 0,3,3,2,2,0 ) w 03223p2n3gr =⋅−⋅=−=
Grupa strukturalna ( jest grupą klasy 2 postaci 1. )3,2
Analizowany mechanizm składa się z członu napędzającego 1 i grupy struktu-ralnej klasy 2, jest zatem mechanizmem klasy 2. Nazwa strukturalna mechanizmu: mechanizm suwakowo – korbowy Rozważany łańcuch kinematyczny można uzupełnić o symetryczną grupę struktu-ralną (2’, 3’) podłączoną równolegle do członu napędzającego.
Schemat rozbudowanego łańcucha kinematycznego o strukturze równoległej
przedstawia rysunek 3, tak zmodyfikowany mechanizm jest me-
chanizmem zaciskowym. Nazwa funkcjonalna mechanizmu: mechanizm chwytaka.
−−−−
−OOOOOO
P
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 3
1w7p,0p,5n 54
====
Rys. 3 Mechanizm chwytaka. 1.3. Ograniczenia geometryczne
Prawidłowe funkcjonowanie mechanizmu przedstawionego na rys. 1 uzależnio-ne jest od odpowiedniego doboru długości jego członów oraz zakresu przemiesz-czenia (skoku) członu napędzającego. Na rys. 4 przedstawiono trzy charaktery-styczne położenia mechanizmu.
1As - lewe skrajne położenie zwrotne członu 1,
3As - prawe skrajne położenie członu 1
2As - położenie członu 1 przy którym następuje zmiana kierunku obrotu członu 3. ( 2A1AA s,ss ∈ )
)
- człon 3 wykonuje obrót zgodnie z kierunkiem wskazówek zegara
lub przeciwnie do ruchu wskazówek zegara. s - człon 3 wykonuje obrót przeciwnie do kierunku wskazówek ze-
gara jeżeli w etapie wcześniejszym poruszał się zgodnie ze wskazówkami zegara.
( 3A2AA s,s∈
Obliczenia kinematyczne i kinetostatyczne przeprowadzone zostaną dla 2AA1A sss ⟨⟨ . Skok członu napędzającego musi spełniać warunek 1A2A sss −≤∆ .
Dla przyjętych wymiarów członów mechanizmu maksymalny możliwy skok me-chanizmu wynosi mm2,659sss 1A3Amax =−=∆ (wartość odczytana z rysunku 4).
Aby możliwe było przejście z położenia 1 do położenia 3 musi być dodatkowo spełniony warunek 10131210131 lllllll −+⟨⟨+− (2)
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 4
Rys. 4. Analiza dopuszczalnego zakresu przemieszczenia (skoku) członu napędzającego 1. 1.4. Model mechanizmu w programie SAM Dobór parametrów łańcucha kinematycznego. )600,650(E)600,250(C
)450,100(B
2
1
0
)600,400(D 3 )400,0(O
)400,100(A
Rys. 5. Model mechanizmu w programie SAM
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 5
Do obliczeń kinematycznych przyjęto dane: m1,0mm100s0 == m1,0mm100s ==∆
s/m1s/mm1000vA == s (3) [ ] [m)t1,0(mm)t1000100(tvsA0 A0A +=+=+== ]Przyjmiemy czas ruchu członu 1 , . s08,0t1 =Obliczymy położenie członu napędzającego po czasie , 1t s . m18,008,011,0A =⋅+=
Wymiary mechanizmu: m05,0mm50ll 1AB ===
m21213,0mm132,212ll 2BC === m15,0mm150ll 31CD === m25,0mm250ll 32DE ===
2. Analiza kinematyczna mechanizmu
2.1. Analiza kinematyczna mechanizmu metodą grafoanalityczną. W celu rozwiązania zadania metodą grafoanalityczną, mechanizm rysujemy w
podziałce w zadanym położeniu dla t=0,08 s (rys. 6). Położenie członu napę-dzającego , prędkość członu napędzającego v .
lksA m18,0= A = s/m1
Zadanie rozwiążemy wykreślnie korzystając z programu AutoCAD.
Podziałka rysunkowa mechanizmu
=mmm
)l(l1
1lk
Przyjmiemy położenia środków mas członów: l , m106,02BS = m05,0l 3DS =
Zadanie można również rozwiązywać wykreślnie bez wspomagania komputero-wego. Uzyskamy wówczas mniejszą dokładność obliczeń ale wystarczającą do sprawdzenia poprawności wyników uzyskanych innymi metodami.
ANALIZA PRĘDKOŚCI
Przyjmujemy podziałkę prędkości
==
−
mmms
)v(v
)v(vk
1
A
Av
Analizę prędkości przeprowadzimy na podstawie równania
CBCB
IIOAB
CDC )v()v()v
⊥⊥+=( ( 4)
gdzie: )v()v( AB =
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 6
Rozwiązujemy wykreślnie równanie prędkości (4) na rysunku 7. Odczytujemy z rysunku 7 wartość rysunkową ( a następnie obliczamy wartość prędkości v .
)vC
C v s/m367,0k)v( vCC ==analogicznie v s/m950,0k)v( vCBCB ==
=mmm
)l(lk1
1l
Rys. 6. Łańcuch kinematyczny mechanizmu w zadanym położeniu w podziałce długości lk
==
−
mmms
)v(v
)v(vk
1
A
Av
Obliczamy prędkości kątowe :
1CB2 s480,4
CBv −==ω ;
1C3 s445,2
CDv −==ω
Rys. 7. Plan prędkości mechanizmu
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 7
Prędkości punktów obliczamy ze wzorów: 3S,E
s/m1223,0DSv 333S =⋅= ω ; v s/m6110,0DE 3E =⋅= ω Prędkość punktu znajdziemy wyznaczając położenie punktu na planie
prędkości na podstawie proporcji: 2S 2s
BCBS
bcbs 22 = ;
BCBSbcbs 2
2 = (5)
Można również skorzystać z równania
BC
B2SIIOA
B2S )v()v()v⊥
+=( (6)
s/m5844,0001,04,584k)v(v v2S2S =⋅== .
ANALIZA PRZYSPIESZEŃ Analizę prędkości przeprowadzimy na podstawie równania:
CD
tC
IICD
nC
CB
tCB
IICB
nCB
0BC )a()a()a()a()a()a
⊥⊥=
+=++=( (7)
gdzie: 22
2nCB sm2571,4CDa −⋅== ω
223
nC sm8965,0CDa −⋅== ω
Przyjmujemy podziałkę przyspieszeń
==
−
mmms
)a(a
)a(a 2
CBn
CBn
ak
]mm[k
a)a(a
nCBn
CB = ; ]mm[ka)a
a
nCn
C =(
Rozwiązujemy wykreślnie równanie (7) jak pokazano na rysunku 8. Odczytujemy wartości rysunkowe przyspieszeń i następnie obliczamy:
2a
tCB
tCB
2a
tC
tC
2aCC
sm125,1k)a(a
,sm311,4k)a(a
,sm403,4k)a(a
−
−
−
⋅=⋅=
⋅=⋅=
⋅=⋅=
305,52121,01255,1
BCat
CB2 ===ε ; 2
tC
3 s740,28150,03111,4
CEa −===ε
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 8
Przyspieszenie punktu E znajdziemy z równania:
tE
nEE aaa += (8)
gdzie: ; a DEa 23
nE ω= DE3
tE ε=
lub z proporcji: CDDE
aa
C
E = ; CDDEaa CE = ; 2
E ms339,715,025,0403,4a −== .
Przyspieszenie punktu S znajdziemy wyznaczając jego położenie na planie przy-spieszeń (punkt z proporcji
3)s3
ED
DSedds 33 = ;
EDDSedds 3
3 = (9)
a 2a3S3S ms466,1k)a( −==
Analogicznie zajdziemy przyspieszenie
punktu S 2
BCBS
bcbs 22 = ;
BCBSbcbs 2
2 = (10)
2
a2S2S ms202,2k)a(a −==
==
−
mmms
)a(a
)a(ak
2
CBn
CBn
a
Rys. 8. Plan przyspieszeń mechanizmu
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 9
2.2. Analiza kinematyczna mechanizmu metoda analityczną
Rys. 9. Wielobok wektorowy mechanizmu Dane: s ( ) [ ]mt1,01,0tvs A0A +=+=
l o02
o01
o1A02013121 180,270,90,0,l,l,l,l, ==== ϕϕϕϕ
Obliczyć: EECC323232 a,v,a,v,,,,,, εεωωϕϕ
Mechanizm opisujemy wielobokiem wektorowym (rys. 9)
0lllll 02013121A =+++++s (11)
Mechanizm opisany jest przez n wektorów. Należy zatem przyjąć do obli-czeń 2 parametrów mechanizmu.
6=102n =−
Po zrzutowaniu na osie mamy:
(12) 0lsinlsinll
,0lcoslcosls
01331221
0233122A=−++
=−++ϕϕ
ϕϕ
Przekształcamy układ równań (12) do postaci:
(13) 33101221
3310222Asinllsinll
,cosllcoslsϕϕ
ϕϕ−=−+
−=−+
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 10
Oznaczając: ; mamy: 02A lsA −= 011 llB −=
33122
,33122
sinlsinlBcoslcoslA
ϕϕϕϕ
−=+−=+
(14)
Równania (14) podnosimy do kwadratu i dodajemy stronami
(15) 0llsinBl2BcosAl2A 231
2222
222
2 =−++++ ϕϕ
Równanie (15) dzielimy przez 2Al2
0sinABcos
Al2llBA
222
231
22
22=++−++ ϕϕ (16)
Oznaczając:2
231
22
22
Al2llBA −++=C ;
02A
011lsll
ABD
−−== otrzymujemy:
(17) 22
22sinDcosC
,0sinDcosCϕϕ
ϕϕ−=+
=++
Po podniesieniu (7) stronami do kwadratu mamy: ( (18) 0)DC(cos2cos)D1 22
2222 =−+++ ϕϕ
Po podstawieniu w 2cosϕ= otrzymamy równanie kwadratowe postaci:
( (19) 0)DC(Cw2w)D1 2222 =−+++
Obliczenia przeprowadzamy dla , co odpowiada położeniu s08,0tt 1 == s i przyjmujemy zgodnie z danymi z programu SAM wartości m18,0A =
,m4,0l,m2,0l,m25,0l,m15,0l,m212132,0l,m05,0l 0201323121 ======
Otrzymujemy:
6818,04,018,02,005,0
lSll
AB
02A
011 =−−=
−−==D
( ) 00066,1212132,022,02
15,0212132,015,022,0Al2
llBAC2222
2
231
22
22−=
⋅−−++=−++=
1 (20) 053647,0w00132,2w4648, 2 =+−
Obliczamy pierwiastki równania (20): 8619967,0=∆ ; 928437,0=∆ w ; w 366216,01 = 0000,12 =
a następnie dwie wartości kąta: , o)1(2 517,68=ϕ ( ) o
22 0=ϕ
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 11
Na podstawie rysunku 9 przyjmujemy rozwiązanie , natomiast rozwiązanie
odrzucamy. ( )12ϕ
( )22ϕZ pierwszego z równań (13) wyznaczamy kąt 3ϕ
948746,015,0
4,0517,68cos212132,018,0l
lcosls
31
0222A3 =−+−=−+−= ϕϕcos
o3 576,341=ϕ
W celu wyznaczenia prędkości kątowych członów 2 i 3 różniczkujemy pierwsze z równań (12) otrzymując: v 0sinlsinl 3331222A =−− ϕωϕω (21)
gdzie: 22 ϕω &= 33 ϕω &=
W celu wyznaczenia prędkości kątowej 3ω obracamy układ współrzędnych o kąt 2ϕ
Równanie (21) przyjmuje postać: 0)sin(l)sin(lcosv 2333122222A =−−−− ϕϕωϕϕωϕ
stąd:
1
2331
2A3 s445,2
059,273sin15,0517,68cos1
)sin(lcosv −−=⋅=
−=
ϕϕϕω (22)
Analogicznie obracając układ współrzędnych o kąt 3ϕ mamy: v 0)sin(l)sin(lcos 3333132223A =−−−− ϕϕωϕϕωϕ
stąd:
1
3231
3A2 s479,4
)059,273sin(212132,0576,341cos1
)sin(lcosv −=
−⋅=
−=
ϕϕϕω (23)
W celu wyznaczenia przyspieszeń kątowych różniczkujemy równanie (21)
zgodnie z tematemv 0aAA ==&
(24) 0coslsinlcoslsinl 3233133312
222222 =−−−− ϕωϕεϕωϕε
Przyspieszenie kątowe 3ε otrzymamy obracając układ współrzędnych o kąt 2ϕ :
222
2331
33122
s731,28059,273sin15,0
059,273cos445,215,0479,4212132,0 −=⋅+⋅−
223
2 )cos(ll=
−+−=
ϕϕωωε
0)cos(l)sin(l)cos(l)sin(l 2323312333122
2222222 =−−−−−−−− ϕϕωϕϕεϕϕωϕϕε
stąd
3 )sin(l −ϕϕ (25)
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 12
Przyspieszenie kątowe 2ε otrzymamy obracając układ współrzędnych o kąt 3ϕ
0)cos(l)sin(l)cos(l)sin(l 3323313333132
2223222 =−−−−−−−− ϕϕωϕϕεϕϕωϕϕε
stąd: (26)
2o
22322
233132
222
2
s305,5)059,273sin(212132,0
445,215,0)059,273cos(479,4212132,0
)sin(ll)cos(l
−−=−⋅
⋅+−⋅−
=−
+−−=
ϕϕωϕϕωε
W celu wyznaczenia parametrów kinematycznych dowolnego punktu mechani-zmu, tzn. jego toru, prędkości i przyspieszenia należy napisać równanie jego wek-tora promienia wodzącego. Przykładowo, aby wyznaczyć parametry ruchu dla punktu E , znajdujemy jego promień Er na podstawie rysunku 9.
323121AE llllsr ++++= (27)
Następnie wyznaczamy jego współrzędne:
r ( ) 3323122AEx cosllcosls ϕϕ +++= (28) ( ) 33231221Ey sinllsinllr ϕϕ +++=
Zależność (28) jest parametrycznym równaniem toru punktu E Różniczkując (28) otrzymujemy współrzędne wektora prędkości:
dt
drExEx =v ;
dtdrEx
Ex =v (29)
stąd ( ) ( )2Ey2
ExE vv +=v (30)
Różniczkując powtórnie (29) otrzymujemy współrzędne wektora przyspieszenia
2Ex
2
Exdt
rd=a ; 2Ey
2
Exdt
rd=a (31)
stąd
( ) ( )2Ey2
ExE aa +=a (32)
2. 3. Wykresy kinematyczne
1. 3. 1. Wykresy kinematyczne w programie SAM.
Wykorzystując zbudowany w programie SAM model mechanizmu wyznaczamy wykresy kinematyczne poszukiwanych parametrów kinematycznych w funkcji cza-su lub w funkcji przemieszczenia liniowego jego członu napędzającego s t A
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 13
W rozważanym mechanizmie są to przebiegi: ( ) ( ) ( ) ( ) ( ) ( )t,t,t,t,t,t 333333222222 εεωωϕϕεεωωϕϕ ====== lub
( ) ( ) ( ) ( ) ( A33A33A22A22A22 s,s,s,s,s )ωωϕϕεεωωϕϕ =====( )A33 s
oraz εε = .
Przebiegi w funkcji czasu oraz przemieszczenia mają w tym wypadku taki sam charakter, ze względu na stałą prędkość liniową członu napędzającego. Av
Dodatkowo wyznaczamy np. prędkość i przyspieszenie całkowite punktu E tzn. ( ) ( )ta,tv EE lub v . ( ) ( )AEAE sa,s
Wykresy kinematyczne analizowanego mechanizmu przedstawiono na rysunkach: 10, 11, 12, 13, 14.
( )t2ϕ
( )t3ϕ( ) o
3 442,1808,0 −=ϕ
( ) o2 550,11108,0 −=ϕ [
( )( )tt
3
2ϕϕ
][ o
]t s
Rys. 10. Wykresy ( ) ( )t,t 32 ϕϕ z programu SAM
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 14
( )( )
]s[
tt
13
2
−
ωω
( )t2ω
( )t3ω
( ) 477,408,02 =ω
( ) 444,208,03 −=ω
]s[t
Rys. 11. Wykresy ( ) ( )t,t 32 ωω z programu SAM
302,5)08,0(2 −=ε
729,28)08,0(3 =ε
( )
( )]s[
tt
23
2
−
εε
)t(3ε
)t(2ε
]s[t
Rys. 12. Wykresy ( ) ( )t,t 32 εε z programu SAM
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 15
( )
( )]sm[
tvtv
1E
C
−⋅
( )tvE
t
Rys. 13. Wykresy v z programu SAM ( ) ( )tv,t EC
t
( ) 367,008,0vC =
( )taE
( )tvC
( ) 611,008,0vE =
( ) 402,408,0aC =
( ) 336,708,0aE =
]s[
( )
]sm[
)t(ata
2E
C
−⋅
( )taC]s[
Rys. 14. Wykresy a z programu SAM ( ) ( )ta,t EC
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 16
2. 3. 2. Wykresy kinematyczne otrzymane na podstawie obliczeń analitycznych.
Na podstawie otrzymanych związków analitycznych można sporządzić wykresy kinematyczne dla tych samych parametrów kinematycznych wykorzystując takie programy komputerowe jak: MATHCAD, MATLAB, EXCEL i inne. Wyznaczenie tych charakterystyk nie jest obowiązkowe.
2.4 Porównanie wyników analizy kinematycznej dla zadanego położenia me-chanizmu.
Wyniki analizy kinematycznej mechanizmu dla położenia członu napędzającego ( ) m18,008,0ts 1A == zestawiono w tabeli 2.
Tabela 2. Porównanie wyników analizy kinematycznej.
Lp. Parametr SAM Metoda Grafoanalityczna
Metoda Analityczna
1 ][ o2ϕ -111,550º+180º 68,518º 68,517º
2 3ϕ -18,442º+360º 341,580º 341,576º 3 2ω 4,480 4,480 4,479 4 3ω -2,45 2,445 -2,445 5 2ε -5,302 5,305 -5,305 6 3ε 28,729 28,740 28,731 7 Cv 0,367 0,367 - 8 Ev 0,611 0,611 - 9 2Sv - 0,584 - 10 3Sv - 0,122 - 11 Ca 4,402 4,403 - 12 Ea 7,336 7,339 - 13 2Sa - 2,202 - 14 3Sa - 1,466 -
Porównanie obliczeń wyników w tabeli 2 wskazuje na ich zgodność co oznacza, że nie popełniono błędów obliczeniowych. Duża dokładność obliczeń metody gra-foanalitycznej wynika z zastosowania do wykonywania rysunków programu Auto-CAD. Różnice wartości kątów 2ϕ i 3ϕ otrzymanych w programie SAM i w oblicze-
niach analitycznych oraz na rysunkach wynikają ze sposobu ich mierzenia w pro-gramie SAM. O poprawności obliczeń świadczy jednak wynik sum kontrolnych podanych w tabeli 2.
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 17
3. Analiza kinetostatyczna mechanizmu 3. 1 Obliczenie mas i momentów bezwładności członów
Zgodnie z wymaganiami zadania wszystkie człony mechanizmu traktujemy jako masowe. Uwzględnimy wpływ sił ciężkości na obciążenie mechanizmu. Zakłada-my, że człony 2 i 3 wykonane są ze stali i mają kształt płaskowników o przekroju prostokątnym z godnie z rysunkiem 15.
Rys. 15. Schemat konstrukcyjny członów 2 i 3. Do obliczeń przyjmujemy: masa właściwa stali 33 mm/g108,7 −⋅=ρ
mm400llll,mm212ll,mm40b,mm30a
DF32313
CD2==+=
====
Obliczamy masy członów: kg2g19844030212108,7ablVm 3
222 ≅=⋅⋅⋅⋅=⋅== −ρρ ,
kg7,3g37444030400108,7ablVm 3333 ≅=⋅⋅⋅⋅=⋅== −ρρ
Przyjmiemy masę członu 1, m . kg21 =
Ponieważ człon 1 wykonuje ruch postępowy jednostajny , zgodnie z warunkami
zadania, zatem zarówno siła bezwładności tego członu , jak również moment sił bezwładności
0maB 1S1 ==0JM 11S1B =⋅= ε .
Moment bezwładności członu przedstawionego na rysunku 15 względem środ-ka masy obliczamy ze wzoru:
12
lbm22
S+⋅=J (33)
jeśli to stosujemy wzór przybliżony bl⟩⟩
12lmJ2
S ⋅= (34)
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 18
Obliczamy momenty bezwładności członów względem środków mas, które znajdują się w połowie długości członów na podstawie wzoru (34):
2322
222S kgm105,7
12212,00,2
12lmJ −⋅=⋅=⋅=
2322
333S kgm1033,49
124,07,3
12lmJ −⋅=⋅=⋅=
3.2. Obliczenie sił ciężkości, sił bezwładności i momentów od sił bezwładności oraz przyjęcie zewnętrznych sił i momentów oporu Siły ciężkości członów: :gmG;gmG;gm 332211 ===G G N30,36G;N62,19G 321 ===
Siły bezwładności członów: 2S22 amB −= ; , N03,4016,22amB 2S22 =⋅==
3S33 amB −= ; N42,5466,17,3amB 3S33 =⋅==
Obliczamy momenty od sił bezwładności członów 22S2B JM ε−= ; M , Nm04,03,5105,7J 3
22S2B =⋅⋅== −ε
33S3B JM ε−= ; M Nm42,173,281033,49J 333S3B =⋅⋅== −ε
Przyjmujemy siłę zewnętrzną oporu P oraz zewnętrzny moment opo-
ru . Punkt przyłożenia siły, jej kierunek oraz zwrot siły i zwrot momentu
oporu przedstawiono na rysunku 16.
N103 =Nm2M3 =
3.3. Wyznaczenie reakcji w parach kinematycznych oraz siły równoważącej meto-dą grafoanalityczną
Rysujemy mechanizm w podziałce długości zaznaczając na rysunku zwroty
przyspieszeń kątowych członów oraz zwroty i kierunki przyspieszeń liniowych środków mas członów. Obciążamy mechanizm siłami ciężkości, siłami bezwładno-ści i momentami od sił bezwładności oraz uogólnionymi siłami zewnętrznymi oporu jak pokazano na rysunku 16. Rysunki wykorzystywane do analizy kinetostatycznej metodą grafoanalityczną wykonamy w programie AutoCAD.
lk
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 19
=lk
Rys. 16. Mechanizm z układem sił zewnętrznych bez siły równoważącej Analiza sił działających na grupę strukturalną (2,3).
Uwalniamy od więzów grupę strukturalną (2,3) rozkładając reakcje w przegu-bach na składowe styczne i normalne dla członów zgodnie z rysunkiem 17a.
Rys. 17. Układ sił zewnętrznych i reakcji przyłożonych do grupy strukturalnej (2,3)
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 20
Zapisujemy wektorowe równania równowagi sił działających na człony 2 i 3.
( ) 0RBGRRR 3222t12
n122i =++++=∑
( ) 0RRGBPRRn03
t03333233i =++++++=∑ (35)
Po dodaniu stronami równań (34) otrzymujemy warunek równowagi sił działają-
cych na grupę:
0RRGBPBGRRn03
t0333322
t12
n12 =++++++++ (36)
Równanie (36) zawiera cztery niewiadome, aby więc można je było rozwiązać korzystając z wieloboku wektorowego sił, należy w pierwszej kolejności wyznaczyć
reakcje styczne t12R oraz t
03R układając warunki równowagi momentów wszyst-
kich sił osobno dla członu 2 oraz dla członu 3 względem punktu C, który należy do wspólnej pary kinematycznej grupy.
; G ( ) 0M 2ic =∑ 0BCRMhBh t
122B2212 =⋅−+⋅−⋅
stąd BC
MhBhGR 2B2212t12
+⋅−⋅= (37)
N28,32121,0
039,0027,003,4039,062,19Rt12 =−⋅−⋅=
; ( ) 0M 3ic =∑ 0CDRhPMMhBhG t
035333B4333 =⋅+++−⋅−−
stąd CD
hPMMhBhG 5333B4333t03
−−+⋅+=R (38)
N35,25
150,0358,010242,1196,042,5190,03,36Rt
03 =⋅−−+⋅+⋅=
Równanie (36) zawiera teraz tylko dwie niewiadome n12R oraz R . n
03
W celu graficznego rozwiązania równania (36) przyjmujemy podziałkę rysunko-
wą sił ( )
=mmN
GG
2
2Rk . Otrzymujemy teraz równanie równowagi w postaci ry-
sunkowej
0)R()R()G()B()P()B()G()R()Rn03
t0333322
t12
n12 =++++++++( (39)
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 21
Rozwiązanie graficzne równania (39) przedstawiono na rysunku 18.
( )
=mmN
GGk
2
2R
Rys. 18. Plan sił przyłożonych do grupy strukturalnej (2,3) zgodnie z równaniem (39) Na podstawie rysunku 18 odczytujemy:
oraz N22,20k)R(R
N98,19k)R(R
Rn03
n03
Rn12
n12
==
==N42,32k)R(RN24,20k)R(R
R0303
R1212====
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 22
Na podstawie układu równań (35) oznaczamy wektory )R23( i )R32( na planie
sił (rys. 18). N30,6k)R(RR R233223 ===
Analiza sił działających na człon napędzający Człon napędzający uwalniamy od więzów zgodnie z rys 19 a.
Równanie równowagi sił działających na człon napędzający w postaci rysunkowej ma postać. (40) 0)()()( =++ R()PGR 011R121 +
Podziałka rysunkowa ( )
=mmN
GG
1
1Rk
Graficzne rozwiązanie równania (40) z uwzględnieniem podziałki Rk
przedstawia rys. 19.
a) b)
Rys. 19. Analiza sił działających na człon napędzający: a) człon napędzający uwolniony od
więzów; b) plan sił członu napędzającego
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 23
Z równania równowagi momentów względem punktu A wyznaczamy moment utwierdzenia (41) ∑ =−⋅= 0MhR;0M 01621iAstąd M 62101 hR ⋅= Nm2024,0010,024,20M01 =⋅=
Na podstawie rysunku 19 obliczamy
N26,4)P(kP;N40,39)R(kR 1RR1R01R01 ====
3. 4. Obliczenie siły równoważącej metodą mocy chwilowych.
Mechanizm rysujemy w podziałce i obciążamy wszystkimi obliczonymi si-
łami zewnętrznymi, do członu napędzającego przykładamy siłę równoważącą lk
1RP
o zwrocie zgodnym ze zwrotem prędkości liniowej członu. Rysujemy wektory pręd-kości liniowych wszystkich punktów przyłożenia sił oraz oznaczamy prędkości ką-towe wszystkich członów mechanizmu. Schemat obliczeniowy mechanizmu przed-stawia rysunek 20.
Rys. 20. Schemat obliczeniowy mechanizmu metodą mocy chwilowych
Równanie mocy chwilowych dla powyższego mechanizmu ma postać
0MvP
MvBvGMvBvGvGvP
33E3
33B3S33S322B2S22S2A1A1R
=⋅+⋅+
+⋅+⋅+⋅+⋅+⋅+⋅+⋅+⋅
ωωω
(42)
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 24
Po rozpisaniu iloczynów skalarnych mamy
0McosvPMcosvBcosvGMcosvBcosvGcosvGvP
336E333B53S343S3
22B32S222S21A1A1R=⋅−⋅+⋅+⋅+⋅+
+⋅+⋅+⋅+⋅+⋅ωαωαα
ωααα
stąd
A
336E333B53S343S3
A
22B32S222S21A11R
vMcosvPMcosvBcosvG
vMcosvBcosvGcosvGP
ωαωαα
ωααα
⋅+⋅−⋅−⋅−⋅−
⋅−⋅−⋅−⋅−=(43)
Po podstawieniu wartości liczbowych otrzymamy
145,224,153cos61,01044,242,14,18cos12,042,57,11cos12,03,36
v48,404,066cos58,003,43,107cos58,062,1990cos162,19P
oooA
ooo
1R
⋅+⋅−⋅−⋅−⋅
⋅−⋅−⋅−⋅−=
N29,4P 1R =
3.5. Wyznaczenie siły równoważącej w programie SAM
Model mechanizmu w programie SAM uzupełniamy narzucając członom 1, 2 i 3 masy oraz momenty bezwładności, oraz przykładając zadaną siłę zewnętrzną i moment sił zewnętrznych (rys.21).
Wartość odczytanej z wykresu siły równoważącej (rys. 22) dla zadanego poło-żenia członu napędzającego wynosi P . N23,41R =
Rys. 21. Model mechanizmu do analizy kinetostatycznej w programie SAM
Opracowali: H. Jaworowski, J. Felis

Przykład analizy mechanizmu dźwigniowego 25
Opracowali: H. Jaworowski, J. Felis
N23,4)08,0(P 1R =
[t
]N[)t(P 1R
]s
Rys. 22. Charakterystyka siły równoważącej z programu SAM )t(P 1r
3. 6. Porównanie wyników obliczeń siły równoważącej
Wyniki obliczeń siły równoważącej dla mechanizmu w zadanym położeniu ze-
stawiono w tabeli 3.
Tabela 3. Porównanie wyników obliczeń siły równoważącej
Metoda grafoanalityczna 1RP
Metoda mocy chwilowych1RP
Obliczenia w programie SAM 1RP
4,26 N 4,29 N 4,23 N Porównanie wyników wskazuje, że obliczenia zostały wykonane poprawnie