-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
1/32
Asia-Pacific Journal of Operational ResearchVol. 30, No. 2
(2013) 1250053 (32 pages)c World Scientific Publishing Co. &
Operational Research Society of Singapore
DOI: 10.1142/S0217595912500534
APPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE
SYSTEM IN THE PROCESS OF TRANSPORTATION SUPPORT
DRAGAN PAMUCAR
Military Academy, University of Defence
Pavla Jurisica Sturma 33, 11000 Belgrade,
[email protected]
VESKO LUKOVAC
Military Academy, University of Defence
Pavla Jurisica Sturma 33, 11000 Belgrade, Serbia
[email protected]
SNEZANA PEJCIC-TARLE
Faculty of Transport and Traffic Engineering, University of
Belgrade
Vojvode Stepe 305, 11000 Belgrade,
[email protected]
Published 28 January 2013
The possibility for more confidential predictions, leaning on
scientific methods andaccomplishments of information technology
leaves more time for the realization of logisticneeds. Longstanding
ambitions to acquire desired levels of efficiency within the
systemwith minimal costs of resources, materials, energy and money
are the features of executivestructures of logistic systems. A
successful logistic process is based on validation of
tech-nological development, indicating the need for a faster and
more confidential integration
of logistic systems and instilling confidence with military
units that provide criticalsupport (supply, transport and
maintenance) will be reliably realized according to rele-vance and
priority. Conclusions like these impose the necessity that the
decision-makingprocess of logistic organs is accessed carefully and
systematically, since any wrong deci-sion leads to a reduced state
of readiness for military units. To facilitate the
day-to-dayoperation of the Army of Serbia and the completion of
both scheduled and unscheduledtasks it is necessary to satisfy the
wide range of transport requirements. In this paper,the Adaptive
Neuro Fuzzy Inference System (ANFIS) is described, thus making
possiblea strategy of coordination of transport assets to formulate
an automatic control strat-egy. This model successfully imitates
the decision-making process of the chiefs of logisticsupport. As a
result of the research, it is shown that the suggested ANFIS, which
has theability to learn, has a possibility to imitate the
decision-making process of the transport
support officers and show the level of competence that is
comparable with the level oftheir competence.
Keywords: Logistic process; neuro-fuzzy model; vehicle
assignment problem; fuzzy sets.
Corresponding author
1250053-1
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
http://dx.doi.org/10.1142/S0217595912500534http://dx.doi.org/10.1142/S0217595912500534
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
2/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
1. Introduction
Increased mobility and subsequent consumption of supply lends
itself to the conceptthat complex missions and tasks need to have
an increased problem-solving input
by the custodians of the logistic system. The nature of military
operations, by
definition, makes the accurate prediction of logistic
requirement demanding and
uncertain. This is why maintenance of a reserve is needed,
which, among other
things, imposes additional expense on the system.
In the Gulf War, the logistic support of the forces engaged is
described as moun-
tain movement. A division in that time spent munitions, fuel and
other expendables
as much as the army during World War II. A total of 1.2 million
liters of petrols, oils
and lubricants were spent daily, approximately a million liters
of drinking water andaround 200 tractors were engaged in the
process. During Operation Desert Storm,
the division spent more than 8 million liters of fuel for 100
hours of offensive action,
the resupply of which took more than 400 tankers with the volume
of more than
200m3.
The logistic system in the Army of Serbia has been created to
protect and
maintain military readiness. During the execution of the
military operations, the
structure of logistic force elements, equipment and resources is
organized so that the
success in combat and operations is ensured. Improvement in
information security
and in technology of transport enables a formation to change
mass with speed andensures that everything will work properly. Full
spectrum supportability means
support to a soldier from the supply resource to the point where
it should be
necessary; in a tunnel, in a dome of military engines, on a
ship, in an airplane cabin
or in the base.
In order to achieve certain systems for logistic support,
systems are created
to meet the required tasks and adjust to environmental changes
and new require-
ments. It is models that use the methods of operational research
that are frequently
created.
The paper investigates the problem of an optimal choice of
transport dependingon the needs of Serbian military units. Units of
logistic support in the Serbian
Armed Forces need to respond to numerous transport requirements
coming from
other military units. Each requirement comprises many elements,
which means that
the choice of an adequate vehicle is by no means simple. The
presented problem is
known as vehicle assignment problem (VAP) or an assignment
problem in general
(Bradley et al., 1977; Zeleny, 1982).
In the last decades, there were many attempts to solve the
assignment of vehi-
cles to transportation jobs (routes). In its simplest form, VAP
can be formulated
as a linear programming problem (Abara, 1989) and solved with an
application
of the simplex method (Cooke, 1985), an assignment algorithm
called Hungarian
method (Bradleyet al., 1977), network algorithms (Cooke, 1985)
or the transporta-
tion method (Lotfi and Pegels, 1989) as well as its extensions
(Pilot and Pilot, 1999).
In real life situations, VAP is more complicated and requires
more advanced methods
1250053-2
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
3/32
Application of Adaptive Neuro Fuzzy Inference System
to be solved. Some authors (Lobel, 1998; Rushmeier and
Kantogiorgis, 1997; Ziarati
et al., 1999) formulate VAP in terms of the linear, integer or
mixed integer program-
ming problem. Some others (Beaujon and Turnquist, 1991)
transform in terms of
linear, discrete model into a nonlinear, continuous form. In
both cases, the prob-
lems are formulated either in deterministic or nondeterministic
form (Beaujon and
Turnquist, 1991; Milosavljevic et al., 1996). Many models are
based on queuing
theory (Green and Guha, 1995; Whitt, 1992). They consider either
a homogeneous
(Beaujon and Turnquist, 1991; Lobel, 1998) or a nonhomogeneous
fleet (Rushmeier
and Kantogiorgis, 1997; Ziarati et al., 1999). Some of the
models combine VAP
with other fleet management problems, such as: fleet sizing
(Beaujon and Turn-
quist, 1991; Crainic and Laporte, 1997; Crainic, 2000), vehicle
routing (Beaujon
and Turnquist, 1991) or vehicle scheduling (Booler, 1980; Lobel,
1998) with time
and capacity constraints (Crainic and Laporte, 1997; Crainic,
2000). The models
usually refer to specific transportation environments, such as
urban transportation
(Lobel, 1998), rail transportation (Booler, 1980; Ziarati et
al., 1999), or air trans-
portation (Rushmeier and Kantogiorgis, 1997). In most cases, the
proposed vehicle
assignment models have a single objective character, however,
different objective
functions are considered. The most popular are total
transportation costs (Ziarati
et al., 1999), profit (Beaujon and Turnquist, 1991; Rushmeier
and Kantogiorgis,
1997), or empty rides (flows) (Lobel, 1998). Depending on
specific characteristics
of VAP and complexity of the decision models, various solution
procedures and
algorithms are applied to solve concrete instances of VAP.
Ziaratiet al.(1999) consider the problem of assigning
locomotives to trains that
operate on certain routes. The demand on specific routes
influences the composi-
tion and length of each train, which imposes certain conditions
on selection of a
locomotive for a particular train. The decision problem is
formulated in terms of
linear integer programming and solved by a customized branch and
cutalgorithm
(Bradley et al., 1977; Hillier et al., 1990).
Ichoua et al. (2003) present an original formulation of a
dial-a-ride problem.
As opposed to traditional formulations of travel time as a
function of distance in adial-a-ride problem, the authors propose
travel time differentiation based on various
factors, including time of the day, traffic congestion and
others. They construct
a mathematical model that involves a relationship between the
travel speed and
the time of day. Their model is experimentally evaluated in
static and dynamic
conditions.
Rushmeiner and Kantogiorgis (1997) present interesting
considerations on
assignment of airplanes to particular transportation jobs
(flights). They formulated
VAP in terms of mixed integer mathematical programming with
price-wise linear
constraints. The decision problem is solved by a Cplex solver
for GAMS system anda heuristic procedure for rounding of noninteger
solutions.
The most up-to-date approaches to modeling and solving VAP
involve stake-
holders analysis leading to multiple objective formulations of
the problem (Singh
and Saxena, 2003), analysis of uncertainty and imprecision of
data (Milosavljevic
1250053-3
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
4/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
et al., 1996; Zak, 2002), and application of artificial
intelligence methods in the
solution procedures of the problem (Vukadinovic et al., 1996;
Vukadinovic et al.,
1999).
Zeleny (1982) and Singh and Saxena (2003) claim that multiple
criteria formu-
lations of different categories of transportation
decision-making problems are more
realistic than their single criterion equivalents. Zeleny (1982)
proposes one of the
first multiple criteria formulations of a classical
transportation problem.
Singh and Saxena (2003) investigate another variant of a
transportation prob-
lem focused on optimization of the total transportation time
between certain
origins and destinations. The authors consider three nonlinear,
time-oriented cri-
teria, such as riding time, loading and unloading time, and a
set numerous con-
straints. The problem is solved by a heuristic procedure that
utilizes a specific
and original structure of the problem. The optimal solution
defines a minimal flow
of materials in the transportation network and a minimal time
required to dis-
tribute this flow in a network. Computational efficiency of the
proposed algorithm
is analyzed on a real life case study focused on transportation
of iron in a steel
industry.
Milosaviljevic et al. (1996) formulate a VAP for a road
transportation com-
pany. The authors consider a heterogeneous fleet operating from
a central depot
and define types of vehicles allocated to concrete
transportation jobs. The decision-
making problem is formulated in terms of fuzzy mathematical
programming and
solved by an original heuristic procedure. Fuzzy numbers are
applied to model the
dispatchers preferences and different categories of constraints
associated with fleet
assignment. Further extension of this research is presented in
the articles of Vukadi-
novic et al. (1999) in which neural networks are applied to
generate a set of fuzzy
decision rules allocating vehicles to transportation jobs. Due
to the fact that in many
real life situations VAP is characterized by high computational
complexity, espe-
cially when it is combined with other fleet management problems,
several authors
apply heuristic procedures to solve the analyzed problems. In
some cases, heuristics
are combined with other well-known techniques, such as
branch-and-bound algo-rithm (Rushmeier and Kantogiorgis, 1997;
Henn, 2000). In the last several years,
metaheuristic algorithms earned great popularity as a solution
procedures for an
assignment problem (Jaszkiewicz, 1997; Taillard, 1995).
In the vehicle asignment model presented in this paper,
experience of officers
commanding logistic support units is accumulated into the
neuro-fuzzy network
that can provide a generalized approach. Adaptive neuro-fuzzy
network is trained
to make optimal choices based not only on standard criteria
(reliability of the means
of transport, mobility of the means of transport in field
conditions, exploitation of
the cubage of means of transport and the price per tonal
kilometer), but also onadditional criteria. Additional criteria are
rank units, terrorist activity along lines of
logistic support, combat activity in the vicinity of the unit
being supplied, protection
of human and material resources from hostile activity.
1250053-4
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
5/32
Application of Adaptive Neuro Fuzzy Inference System
2. Structure of the Neuro-Fuzzy System
Fuzzy neural nets are based on joining of fuzzy logics concepts
and artificial neuralnets are based on the theories that have found
their place on top of interest of
researchers in the field of artificial intelligence.
Fuzzy logics, Zadeh (1988, 1989), enables a mathematical
potential for descrip-
tion of indefiniteness related to cognitive processes with man,
such as thinking and
reasoning. It enables reasoning with incomplete and
insufficiently precise informa-
tion, which is also called approximate reasoning(Zadeh,
1975).
Fuzzy logics is mostly used for modeling complex systems in
which it is hard
to define, by using other methods, interdependence that exists
between certain
variables. The models based upon the fuzzy logics are based on
IF-THEN rules,Lee et al. (2003). Each rule establishes a relation
between the linguistic values
through an IF-THEN statement
IFx1is Aj1AND. . . ANDxiis AjiAND. . . ANDxnisAjnTHENy is
Bj,
where xi, i = 1, 2, . . . , n are the input variables, y is the
output variable Aj and
Bj are linguistic values labeling fuzzy sets. The degree with
which the output vari-
able y matches the corresponding fuzzy set Bj, depends on the
degrees of match-
ing of the input variables xi, i = 1, 2, . . . , n to their
fuzzy sets, Aj and on the
logic format (AND, OR) of the antecedent part of the rule
(Delgado et al., 2002).
So, it is immediate calculating the degree of matching in each
rule as shown in
Fig. 1.
Each rule gives a fuzzy set, with a membership function cut in
the higher zone.
By all the rules is given a set of fuzzy sets with differently
cut membership func-
tions, whose deterministic values all have a share in the
inferential result, Teodor-
ovic (1999). A single value is needed to have a useful result.
The resulting fuzzy
set has to be converted to a real number. This operation is
called defuzzification,
Fig. 2.
On the other hand, artificial neural nets, with their different
architectures built
on the concept of artificial neuron, are developed in such a way
that they act
as biological neural systems in performing functions as learning
and recognition of
samples, Vemuriet al.(1998). While fuzzy logics enables the
mechanism of reasoning
with incomplete and insufficiently precise information,
artificial neural nets offer
certain extraordinary possibilities, such as the possibility of
learning, adaptation
and generalization, Wang and Keerthipala (1998).
Artificial neurons, like biological ones have simple structure
and similar functions
as biological neurons. The body of neuron is called the node or
a unit, as it is shown
in the Fig. 3.
Artificial neuron is a simple element of processing that
performs a simple math-ematical function. Input values in a neuron
are shown with x1, x2, . . . , xn, wheren
is the overall number of inputs in the neuron. Each input value
is firstly multiplied
with weight coefficient wij , j = 1, 2, . . . , n, wherei is
order number of the neuron in
1250053-5
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
6/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
ACTIVATION
IF OR THEN
IF OR THEn
X
1x
2x
2x
1x
ACCUM
ULATION
X
-100 10030.8
Fig. 1. Applying rules.
the neural net, Takagi (2000). These multiplied values are then
summed and result
in pi.
pi=nj=1
wijxj . (1)
This value is used as an input in a nonlinear function , which
depends on the
parameter the point of activation. The dependence is most
frequently such
that is subtracted from pi and hence their difference is used as
the input in the
outy
Fig. 2. Defuzzification.
1250053-6
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
7/32
Application of Adaptive Neuro Fuzzy Inference System
x1
x2
x3
xn
w1
w2
w3
wn
nnwxwxwxNET +++= ...2211 )(NETFOUT =
Fig. 3. Artificial neuron.
nonlinear function , Park (2002). In this way, we get the value
of the input i
neuron:
yi=(pi ) =
nj=1
wijxj
. (2)Values of the weight factors wij, j = 1, 2, . . . , n can
be changed i.e., adjusted to
input and output data to acquire minimal error with respect to
given data. Thisprocess of adjustment of the weight factors is
called learningi.e., training of neural
net.
Both neural nets and fuzzy logics deal with important aspects of
demonstration
of knowledge, reasoning and learning, but they use different
approaches and possess
their own advantages and disadvantages. Neural nets can learn
from the example,
but it is almost impossible to describe the knowledge acquired
in this way. On
the other hand, fuzzy logics enables approximate reasoning, but
does not have the
feature of self adjustment (Table1).
The main idea of this neuro-adaptive technique is based on the
methods of fuzzymodeling and learning on the given composite of
data. This method of learning is
similar to the method of learning with neural nets. By using the
given input/output
data, Adaptive Neuro Fuzzy Inference System (ANFIS) forms fuzzy
system of rea-
soning in which the parameters of affiliation function are set
by using algorithm
of back propagation or combined with method of the smallest
square error. This
approach enables that the fuzzy system learns on the data it
models. The general
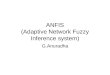
structure of ANFIS is shown on Fig. 4.
Table 1. Comparative features of fuzzy logics and neural
nets.
Neural nets and fuzzy logic Advantages Disadvantages
Fuzzy logics Approximate reasoning No adjustment
Neural nets Learning from example Hard description of
knowledge
1250053-7
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
8/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
x
y
min
min
S
V
M
M
S
V
min
min
min
min
min
min
min
NORMALIZATION
1
4
2
3
5
6
7
8
9
x
y
f
Fig. 4. Structure of ANFIS.
3. Choice of Transportation Using ANFIS Model
The purpose of logistics in the Army of Serbia is to create
forces, armament and
military equipment and enable constant support in military
actions. The primary
goal of military logistics is to contribute to national
protection through security ofneeded systems and means of armament
and military equipment whose features are
reliability, effectiveness and efficiency, high degree of
readiness and technological
superiority of potential antagonists.
According to the draft of military doctrine of the Army of
Serbia, principal
functions of logistics are:
Maintenance,
Fabrication,
Services,
Transport, Facilities.
One of the most important functions of logistics is supply and
transport. Supply
means purchase, spreading, storing and keeping stored material
reserves, including
a definition of the type and amount of reserves on each
level.
The units of transportation support (UTS) every day activities
and receive
a number of transportation requests from other units of the Army
of Serbia
that want to transport various types of loads to different
destination. Every request
of transport is featured by greater number of attributes amongst
which the most
important are the type of goods, the amount of goods (weight and
cubage), the
place of loading and unloading, desired hours of loading and/or
unloading and the
distance on which the products are being transported.
Given that in many fleets in the Army of Serbia there are
various types of
vehicles the dispatchers have to make decisions every day about
the most suitable
1250053-8
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
9/32
Application of Adaptive Neuro Fuzzy Inference System
type of vehicle to carry out the task. In logistic bases, the
following vehicles are used
for performing the task TAM 4500/5000 with the cubage of 5t, FAP
1314 with the
cubage of 8t, TAM150 T11 with the cubage of 12t and FAP 2026
with the cubage
of 20t.
The criteria upon which the organ of logistic support makes a
selection and
brings conclusions for the vehicle that will be directed to the
task are:
Reliability of the means of transport,
Mobility of the means of transport in field conditions,
Exploitation of the cubage of means of transport,
The price for tonal kilometer.
During the conduct of military operations in Bosnia and in the
area of Kosovo,
it has been demonstrated that the UTS that have been actively
included in com-
bat required active logistic support that is primarily shown
through supplies of the
necessary amounts of munitions for infantry and artillery. Usage
of munitions dur-
ing combat operations is large, and the impossibility of
forehand supplies with the
aforementioned units means the battle readiness of the units is
jeopardized. Expe-
riences of the officers from the logistic force elements that
took part in supplying
the units during the war fighting have shown that, besides basic
criteria that serve
for choosing the means of transport for completing the mission,
it is necessary to
get to see additional criteria that are primarily based upon the
experience of thekey decision makers.
Officers with experience have established criteria that they use
to choose a vehi-
cle whose construction and technical characteristics satisfy the
conditions for trans-
portation of a particular type of load. By fuzzy collections
qualitative and imprecise
information can be quantified. Hence, fuzzy reasoning can be
used as a technique
by which descriptive heuristic rules are transformed into
automatic strategy.
The basic problem that an analyst faces while developing fuzzy
systems is defin-
ing the basis of fuzzy rules and parameters relating to the
function of adherence of
fuzzy collections that describe input and output variables.
3.1. Description of the problem
The considered problem is a daily timetable of vehicles at
disposal on certain number
of requirements of transport. Means of transport go to
completion of the mission
from the logistic base and return there upon completion of the
task. Reasons for
this tactic of servicing are insufficient transport of various
types of load by the same
vehicle and the fact that various types of load belong to
different units of the Army
of Serbia. Figure 5 shows the logistic base with certain number
of units that needto be serviced.
Each transport requirement features the following
attributes:
The unit where the load needs to be delivered (place and rough
time of loading
and unloading),
1250053-9
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
10/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
Fig. 5. Logistic base with units that need to be serviced.
The amount of the load transported (type of the load, weight,
and volume) and
The distance on which the load is being transported (the
distance between thelogistic base and certain unit).
Depending on the requirement of transport the classification of
the vehicles on
transporting missions can be made daily, weekly, monthly and
yearly. Here, a case
of daily supply was considered.
The considered problem belongs to the task of assigning. The
problem of classi-
fication falls into the problem of linear programming. It
consists of classification of
n resources and activities to m places and performers, where
maximal efficiency is
wanted. In our case, it means that it is necessary to define the
function of the aim,that is, classify the vehicles on transporting
missions with minimal costs of transport
with limitations and treating problems as problems of
mathematical programming.
The main drawback of the approach based on mathematical
programming is the
fact that it is not simple to formulate the objective function
and set hard limita-
tions. Besides, the information available to dispatchers are
frequently imprecise or
given in the descriptive form:
Often it is impossible to determine the costs of transport
precisely,
Units of higher rank have priority compared to units of lower
rank,
Some vehicles are more suitable for completing transport tasks
on specific con-figuration of the field and in certain climatic
conditions,
Performance of the battle actions near the units that need to be
supplied with
material means requires direction of vehicles that give a
certain level of protection
to drivers and load,
1250053-10
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
http://www.worldscientific.com/action/showImage?doi=10.1142/S0217595912500534&iName=master.img-083.jpg&w=182&h=209
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
11/32
Application of Adaptive Neuro Fuzzy Inference System
Activities of terrorist or insurgent groups near arterial routes
along which resup-
ply of units is performed.
This is why, the conventional approach cannot comprise all
relevant imprecise
parameters. In most of the cases, this phase of the process of
determining the UTS is
reduced to practiced knowledge of those who make decisions.
However, the problem
arises when the decision about engagement of certain types of
vehicles is to be made
by individuals who do not possess enough practiced knowledge. A
solution of the
given problem is proposed in this work, by creating an ANFIS
model.
3.2. Design of ANFIS model
An integral part of an ANFIS model is fuzzy system of inference.
Problems thatan analyst faces when developing fuzzy system are
determining of composites of
linguistic rules that a dispatcher uses and parameters of the
function of adherence
of incoming/outgoing couples.
Generation of the function of adherence of fuzzy composites and
couples by
means of which dispatchers behave imply long communication with
a great number
of dispatchers with experience. Membership functions of fuzzy
composites, which
describe the same notion proposed by various dispatchers, can be
really different.
This is why, the features of developed fuzzy system depend on
the number of dis-
posable dispatchers and the ability to formulate the strategy of
distribution.It is thought that the fuzzy system is composed of
four input variables: reliability,
mobility, tonnage use and the price by tonal kilometer and, one
output variable,
preference of the dispatcher to supply a certain transport
requirement with certain
type of vehicle.
ANFIS implements a Takagi Sugeno Kang fuzzy inference system in
which the
conclusion of a fuzzy rule is constituted by a weighted linear
combination of the
crisp inputs rather than by a fuzzy set. The described criteria
are listed in Table 2.
The composite ofKi(i= 1, 2, . . . , 4) is made of two
subsets:
K+, subset of the criteria of beneficial type, higher values
desirable and
K, subset of the criteria of cost type, lower values
desirable.
Values of input variables are described by means of linguistic
descriptors S =
{l1, l2, . . . , li}, i H, H={1, 2, . . . , T }, where Tis the
overall number of linguistic
Table 2. Criteria for evaluating the offered means of
transportation.
Criterion Min Max Numerical Linguistic
Reliability of the means of transport (RMT)
Mobility of the means of transport in fieldconditions
(MMTFC)
Exploitation of the cubage of transport (ECMT) Cost of tonal
kilometer (CTK)
1250053-11
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
12/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
descriptors. Linguistic variables are presented by triangle
fuzzy number, which is
defined as (,,) (Martinez, 2007).
li(x) =
0, x <
x
, x
x
, x
0, x >
. (3)
In our example, the number of linguistic variables is T= 5: very
low VL, low
L, medium M, high H and very high VH. Linguistic descriptors
have the
following values (Fig. 6).
Membership functions of fuzzy linguistic descriptors lki(i = 1,
T , k = 1, K) are
defined as:
lVL =
0, 0< x
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
13/32
Application of Adaptive Neuro Fuzzy Inference System
Since linguistic values lki(i = 1, T , k = 1, K) are described
by fuzzy numbers
lki{lki, elki}, the process of normalization is realized
according to the following(Herreraet al., 2008):(a) for beneficial
criterion k(k K), the process is realized according to the
form
(lki)n =lki
lmaxk, (9)
where lmaxk is maximal value of fuzzy number lki(k = 1, 2, . . .
, K ), for lki
(lki)= 0.(b) for cost criterionk(kK), the process is realized
according to the following
(lki)n = 1 lki lmink
lmaxk, (10)
wherelmink is minimal value in the area of fuzzy number lki(k=
1, 2, . . . , K ) for
flki(lki)= 0.
Defuzzification of linguistic descriptors is done through
application of the Centre
of Gravity method as per expression (Pamucar et al., 2011):
lki=
x2x1
lki(x) x dxx2x1
lki(x) dx, lH =
0.620.5
x0.50.12 x dx+
0.770.62
0.77x0.15 x dx0.62
0.5x0.50.12 dx+
0.770.62
0.77x0.15 dx
= 0.6382 0.64.
The main problem, which the analyst faces, while creating fuzzy
system is deter-
mining of base for fuzzy rules and parameters of the membership
functions of fuzzy
composites that describes input and output variables (Table 3).
In fuzzy systems,as functions of adherence, Gaussian curves are
depicted (Fig. 7).
In order for the base of rules to be defined, it is necessary to
determine the
relative importance of criterion wk, k = 1, 2, . . . , K (K= 4).
After the survey with
dispatchers in units and delivered prognosis the data are
statistically elaborated
(Table4).
Table 3. Values of function parameters before the training of
ANFIS.
Membership function/Input value MF 1 MF 2 MF 3RMT (11.5, 14.43)
(12.9, 33.1) (11.7, 83.92)
MMTFC (0.12, 0.15) (0.153, 0.53) (0.19, 0.99)
ECMT (5.18, 1.74) (5.78, 21.75) (7.11, 42.70)
CTK (14.2, 2.62) (13.4, 47.25) (11.5, 98.38)
1250053-13
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
14/32
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
15/32
Application of Adaptive Neuro Fuzzy Inference System
x1
x2
x3
x4
A2A2
A1A1
A3A3
B1B1
B2B2
B3B3
C1C1
CC2
C3C3
D1D1
DD2
D3D3
yy
Reliability of the means
of transport
Mobility of the means of
transport in field conditions
Cost of tonal kilometer
Exploitation of the cubage oftransport
v1(y)
v2(y)
v3(y)
v4(y)
v5(y)
Preferential dispatcher
O1i O
2i O
3i O
4i O
5i
Layer 1Layer 1 Layer 2Layer 2 Layer 3Layer 3 Layer 4Layer 4
Layer 5Layer 5
Fig. 8. Structure of the ANFIS.
Kj=1
wk = 1,wk[0, 1], [0, 1], (12)where j is the preference of a
decision maker, i.e., the degree of confidence.
The initial fuzzy system, which determines the preference of
dispatcher that
certain transport requirement is served with vehicle of tonnage
of 5, 8, 12 or 20
tons is projected into adaptive neural net (Fig. 8). The main
aim of ANFIS model
is to decrease the role of a dispatcher while constructing fuzzy
system and leaningon concrete examples of the decisions made in
practice while choosing the motor
vehicle for completion of the tasks given.
Layer 1. The junctions of the first layer represent verbal
categories of input vari-
ables that are quantified by fuzzy composites. Each junction of
the first
layer is adaptive junction and is described by the function of
adherence
xi(xi), i= 1, . . . , 4. Functions of adherence are described by
the form of
Gaussian curves that are featured by two parameters cand .
Gaussian(x,c,) =e
1
2( xc
)2
. (13)Since fuzzy rules are expressed in the form IF the
condition THEN the
consequence, the categories of output variables that are
quantified by
fuzzy composites are shown as adaptive junctions of the first
layer (Altug
et al., 1999; Chiclana et al., 2007).
1250053-15
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
16/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
Layer2. Each junction of this layer counts minimal value of four
input values.
Output values of the junction of the second layer are the
importance of
rules.
O21 =wi=Ai(x1) Bi(x2) Ci(x3) Di(x4). (14)
Layer 3. Every ith node in this layer calculates the ratio of
the ith rules firing
strength to the sum of all rules firing strength.
O31 = wi = wi4i=1wi
, i= 1, . . . , 4. (15)
Layer4. The fourth layer has five adaptive junctions that
represent the preference
of dispatchers that certain transport requirement serves certain
type ofvehicle. Each junction of this layer counts the section of
certain fuzzy
composite with maximal value of input importance of rules.
O41 = wifi. (16)
Layer5. The only junction of the fifth layer is fixed junction
by which the out-
put result of fuzzy system is gained. This is fuzzy composite
with cer-
tain degrees of adherence of possible preference of dispatchers
to direct
the transport task to certain vehicle considered. The output
value is real
number that is found in the interval of zero to one (Sneider and
Frank,1996).
O51 =Overall output=i
wifi=
iwifiiwi
. (17)
By training the neural net with numerical examples of made
decisions, initial forms
of input/output functions of adherence to the phase of
composites are readjusted.
The values of the membership functions after the training of
ANFIS are shown in
the Table5.
The change of function of adherence is trained by
backpropagation algorithm.Neuro-fuzzy modeling requires possession
of useable numerical data. Trust in the
gained result is increased if we dispose of high enough
representative pattern that
would be used for training (Fig. 9).
Proposed neural net is trained on 298 dispatcher decisions.
Table6gives a set
of 40 transportation requests used in neuro fuzzy network
training. The remaining
Table 5. Values of function parameters after the training of
ANFIS.
Membership function/Input value MF 1 MF 2 MF 3RMT (64.45, 50.92)
(66.5, 72.6) (58.42, 77.62)
MMTFC (3.828, 0.39) (5.085, 7.37) (3.14, 4.41)
ECMT (79.1, 33.45) (52.57, 63.29) (76.38, 74.16)
CTK (31.2, 21.78) (29.87, 41.33) (29.61, 26.79)
1250053-16
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
17/32
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
18/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
Table 6. Characteristics of 40 transportation requests (training
pairs).
Transport request RMT MMTFC ECMT PTK ftraining fANFIS
1. 0.9922 0.6693 57 0.3398 0.757 0.755
2. 0.7953 0.8124 19 0.9660 0.573 0.584
3. 0.9131 0.6571 46 0.7189 0.660 0.649
4. 0.0711 0.3116 80 0.7497 0.343 0.342
5. 0.5092 0.9209 11 0.2234 0.560 0.571
6. 0.6383 0.6250 21 0.7729 0.486 0.497
7. 0.9248 0.7278 68 0.1035 0.802 0.813
8. 0.0879 0.9519 35 0.1928 0.485 0.496
9. 0.9153 0.4948 74 0.6161 0.692 0.68810. 0.2705 0.8124 31
0.7957 0.436 0.447
11. 0.2317 0.1518 96 0.9435 0.372 0.383
12. 0.0661 0.3429 19 0.4298 0.230 0.241
13. 0.0373 0.0557 16 0.1477 0.155 0.166
14. 0.9051 0.2470 69 0.3356 0.630 0.641
15. 0.5994 0.7485 35 0.1591 0.606 0.610
16. 0.5677 0.2906 23 0.7142 0.372 0.383
17. 0.5511 0.3710 33 0.2741 0.459 0.470
18. 0.9544 0.5018 85 0.1118 0.786 0.79019. 0.4887 0.3786 5
0.7599 0.321 0.332
20. 0.6365 0.6405 92 0.1253 0.732 0.737
21. 0.7354 0.8459 97 0.7547 0.778 0.789
22. 0.6663 0.3996 40 0.6245 0.491 0.502
23. 0.0173 0.9084 89 0.8082 0.520 0.531
24. 0.9503 0.6196 69 0.7286 0.718 0.729
25. 0.4674 0.1280 14 0.6886 0.268 0.268
26. 0.0259 0.5208 31 0.0271 0.340 0.337
27. 0.3702 0.0164 80 0.4119 0.393 0.38928. 0.9153 0.3949 91
0.5340 0.713 0.719
29. 0.0431 0.0631 78 0.4626 0.283 0.294
30. 0.8732 0.8251 74 0.1495 0.823 0.834
31. 0.1771 0.2776 90 0.4120 0.429 0.440
32. 0.8289 0.4331 81 0.1777 0.705 0.694
33. 0.7716 0.4607 40 0.5255 0.556 0.567
34. 0.3447 0.1692 38 0.7060 0.296 0.313
35. 0.9198 0.2518 61 0.3962 0.610 0.621
36. 0.9785 0.0300 48 0.7878 0.493 0.50437. 0.2659 0.2888 28
0.9728 0.252 0.263
38. 0.3539 0.9993 60 0.3016 0.643 0.632
39. 0.1168 0.9127 15 0.0024 0.452 0.463
40. 0.0429 0.6778 60 0.2126 0.447 0.436
1250053-18
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
19/32
Application of Adaptive Neuro Fuzzy Inference System
0.2
0.4
0.6
0.8
20
40
60
80
0.4
0.5
0.6
0.7
Mobility of the
means of transport
in field conditions
Dispatcher'spreferences
Exploitation of the
cubage of transport 2040
6080
0.2
0.4
0.6
0.8
0.4
0.5
0.6
0.7
Dispatcher'spreferences
Mobility of the
means of transport
in field conditions
Reliability of the
means of transport
2040
6080
10
20
30
0.4
0.5
0.6
0.7
Reliability of themeans of transport
Cost of tonal kilometer
Dispatcher'spreferences
10
20
30
20
40
60
80
0.4
0.5
0.6
0.7
Exploitation of thecubage of transport
Dispatcher'spreferences
Cost of tonal kilometer
Fig. 10. Graphic representation of the set of the possible
solutions of input variables.
Fig. 11. Training data ANFIS output.
After that, the next value xk is transmitted. Neural net is
trained if it can
successfully solve the tasks it is trained for. After training
the neural net can gen-
eralize new input data that it is not trained for (Figure
10).
1250053-19
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
http://www.worldscientific.com/action/showImage?doi=10.1142/S0217595912500534&iName=master.img-190.jpg&w=357&h=159
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
20/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
Comparative values of ANFIS model criteria functions (fANFIS)
and training set
criteria functions (ftraining) is shown in Fig. 11. Figure 11
shows the negligible error
at ANFIS model output.
Five-layered adaptive net is tested on 25 dispatcher decisions.
For each type
of vehicle, the data from transport requirement are transmitted
through ANFIS,
hence, gaining certain values of input functions. Transport
vehicle is chosen as:
fVi = max(fVi), i= 1, . . . , 4. (20)
4. Results
A total of 25 transport requirements are considered for units
that are found onthe tasks of security of administrative line of
Kosovo and Metohija. Features of
transport tasks are shown in Table7.
Besides shown features, transport task is described by the time
of loading
and unloading, location where the unit is set, the degree of
danger that the
Table 7. Features of transport tasks.
Transport task Priority units Type of cargo The amount of Type
of roadcargo tons
1. First Infantry ammunition 32 Rural2. Second Infantry mine 20
Country
3. First Gun ammunition 226 Asphalt
4. First Infantry ammunition 35 Rural
5. Second Food 15 Rural
6. Third Food 9 Asphalt
7. First Infantry ammunition 15 Country
8. Second Infantry mine 19 Rural
9. First Anti-tank mine 23 Country
10. First Anti-tank mine 28 Rural
11. Second Infantry mine 9 Asphalt12. Third Infantry mine 11
Country
13. Third Food 12 Rural
14. First Gun ammunition 126 Rural
15. First Infantry ammunition 75 Asphalt
16. Second Gun ammunition 21 Rural
17. Third Food 61 Country
18. Third Food 19 Asphalt
19. Second Infantry mine 147 Country
20. First Gun ammunition 97 Country
21. Second Infantry ammunition 73 Asphalt
22. First Infantry mine 33 Asphalt
23. First Gun ammunition 371 Rural
24. First Gun ammunition 27 Asphalt
25. Second Anti-tank mine 55 Asphalt
1250053-20
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
21/32
Application of Adaptive Neuro Fuzzy Inference System
itinerary is found in by hostile forces, as well as the
possibility to use alternative
directions.
Where V1 = TAM 4500/5000 with the cubage of 5t, V2 = FAP 1314
with the
cubage of 8t, V3= TAM150 T11 with the cubage of 12t and V4 = FAP
2026 with
the cubage of 20t.
The numerical results of Tables6and8imply the applicability of
the proposed
model used as a decision-making tool for vehicle assignment. As
is shown in Table8,
decisions on vehicle assignment at ANFIS model output are
identical to those made
by dispatchers. In transportation requirements 1, 8, 10, 13, 14,
15, 17, 19, 20 and
23, ANFIS model gave alternative types of vehicle, which is
acceptable, in some
cases it is even preferable, as units of Serbian armed forces
have a heterogeneous
motor pool at their disposal.
Table 8. Comparative review of decisions and ANFIS model.
Transport Selection of vehicles for the transport requestrequest
Dispatcher ANFIS
1. V3 V2,V3
2. V3 V3
3. V4 V4
4. V3 V3
5. V2 V2
6. V1 V1
7. V3 V3
8. V3 V3, V4
9. V3 V3
10. V3 V3, V4
11. V1 V1
12. V3 V3
13. V3 V3, V4
14. V3 V3, V4
15. V1 V1, V2
16. V3 V3
17. V3 V3, V4
18. V4 V4
19. V3 V3, V4
20. V1 V1, V2
21. V4 V422. V4 V4
23. V1 V1, V2
24. V1 V1
25. V4 V4
1250053-21
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
22/32
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
23/32
Application of Adaptive Neuro Fuzzy Inference System
AppendixA
.
Transport
RMT
MMTF
C
ECMT
C
TK
ftraining
fANFIS
Tra
nsport
RMT
MMTF
C
ECMT
CTK
ftraining
fANFIS
reques
t
request
1.
0.6182
0.9
736
19
0.4292
0.6
13
0.6
24
19
.
0.8
912
0.1
472
66
0.7
199
0.5
49
0
.538
2.
0.1478
0.7
022
25
0.9113
0.3
34
0.3
23
20
.
0.5
870
0.7
121
97
0.9
199
0.6
70
0
.681
3.
0.4267
0.9
621
90
0.5811
0.7
05
0.7
16
21
.
0.8
173
0.6
970
59
0.3
273
0.7
10
0
.721
4.
0.0765
0.3
166
51
0.1723
0.3
32
0.3
43
22
.
0.9
714
0.5
910
10
0.1
988
0.6
22
0
.633
5.
0.9023
0.3
239
30
0.1851
0.5
69
0.5
80
23
.
0.4
999
0.3
143
32
0.3
147
0.4
18
0
.429
6.
0.3747
0.8
341
29
0.9633
0.4
58
0.4
69
24
.
0.6
665
0.7
380
43
0.1
915
0.6
43
0
.654
7.
0.7263
0.3
727
69
0.0167
0.6
37
0.6
26
25
.
0.1
474
0.2
599
63
0.7
649
0.3
11
0
.294
8.
0.3086
0.3
272
53
0.4412
0.3
95
0.4
06
26
.
0.2
040
0.0
446
32
0.7
240
0.1
92
0
.203
9.
0.9170
0.9
662
20
0.2928
0.7
32
0.7
15
27
.
0.7
670
0.0
816
90
0.3
832
0.5
80
0
.591
10
.
0.4404
0.9
939
23
0.8214
0.5
28
0.5
39
28
.
0.3
449
0.6
802
98
0.4
060
0.6
29
0
.640
11
.
0.4976
0.7
909
16
0.1984
0.5
32
0.5
49
29
.
0.9
806
0.3
013
93
0.7
142
0.6
95
0
.706
12
.
0.8888
0.0
450
77
0.2891
0.5
88
0.5
99
30
.
0.6
126
0.9
733
43
0.2
085
0.6
93
0
.704
13
.
0.5104
0.9
445
34
0.5685
0.5
90
0.6
01
31
.
0.9
757
0.8
277
85
0.1
788
0.8
84
0
.893
14
.
0.1288
0.5
407
34
0.0540
0.3
87
0.3
98
32
.
0.7
299
0.3
604
47
0.6
965
0.5
11
0
.522
15
.
0.8072
0.1
618
65
0.2002
0.5
74
0.5
85
33
.
0.1
137
0.4
296
95
0.8
935
0.4
17
0
.428
16
.
0.5766
0.1
717
84
0.7058
0.4
93
0.5
04
34
.
0.4
628
0.9
424
76
0.4
715
0.6
88
0
.697
17
.
0.1524
0.1
639
40
0.5265
0.2
50
0.2
33
35
.
0.6
119
0.4
832
59
0.1
435
0.5
92
0
.603
18
.
0.1431
0.6
921
81
0.9760
0.4
63
0.4
74
36
.
0.7
644
0.8
584
43
0.0
815
0.7
24
0
.735
1250053-23
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
24/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
AppendixA
.(Continued)
Transport
R
MT
MMTF
C
ECMT
C
TK
ftraining
fANFIS
Tra
nsport
RMT
MMTF
C
ECMT
CTK
ftraining
fANFIS
reques
t
request
37
.
0.5219
0.4
409
23
0.8039
0.3
92
0.4
03
55
.
0.0
583
0.5
834
22
0.3
221
0.3
18
0
.301
38
.
0.2897
0.7
096
36
0.1710
0.4
87
0.4
98
56
.
0.0
415
0.3
525
63
0.9
172
0.2
86
0
.297
39
.
0.9696
0.4
158
95
0.6110
0.7
40
0.7
49
57
.
0.8
449
0.5
687
24
0.5
899
0.5
67
0
.576
40
.
0.5300
0.1
436
69
0.3318
0.4
68
0.4
79
58
.
0.9
298
0.8
110
45
0.5
244
0.7
29
0
.740
41
.
0.5907
0.0
718
53
0.9324
0.3
68
0.3
79
59
.
0.9
545
0.7
615
53
0.2
026
0.7
75
0
.786
42
.
0.1434
0.7
342
57
0.0932
0.5
04
0.5
15
60
.
0.2
007
0.0
046
68
0.9
514
0.2
46
0
.229
43
.
0.1811
0.5
185
47
0.9885
0.3
38
0.3
49
61
.
0.1
335
0.9
993
24
0.3
322
0.4
73
0
.482
44
.
0.8318
0.4
420
29
0.9196
0.5
04
0.5
13
62
.
0.8
831
0.8
840
49
0.8
620
0.7
11
0
.722
45
.
0.3403
0.2
080
22
0.7023
0.2
66
0.2
77
63
.
0.5
373
0.5
298
62
0.2
138
0.5
81
0
.598
46
.
0.9491
0.8
599
78
0.5130
0.8
34
0.8
45
64
.
0.4
258
0.7
625
34
0.8
082
0.4
82
0
.491
47
.
0.9936
0.6
113
51
0.8120
0.6
77
0.6
88
65
.
0.4
719
0.6
780
60
0.6
176
0.5
57
0
.568
48
.
0.8635
0.7
655
83
0.3698
0.8
02
0.8
13
66
.
0.2
868
0.2
104
27
0.8
484
0.2
46
0
.263
49
.
0.4818
0.7
990
28
0.2517
0.5
53
0.5
64
67
.
0.2
852
0.7
573
30
0.6
865
0.4
33
0
.444
50
.
0.6440
0.2
698
68
0.0776
0.5
69
0.5
78
68
.
0.8
377
0.4
050
29
0.3
517
0.5
52
0
.563
51
.
0.4223
0.7
147
36
0.7544
0.4
77
0.4
88
69
.
0.5
550
0.4
460
30
0.6
459
0.4
38
0
.455
52
.
0.4873
0.0
699
12
0.2837
0.2
93
0.3
04
70
.
0.3
307
0.9
545
92
0.3
814
0.6
94
0
.703
53
.
0.7877
0.4
373
66
0.3557
0.6
36
0.6
47
71
.
0.4
648
0.2
506
65
0.3
421
0.4
66
0
.477
54
.
0.4820
0.6
259
93
0.3861
0.6
50
0.6
61
72
.
0.7
315
0.5
164
54
0.0
572
0.6
40
0
.657
1250053-24
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
25/32
Application of Adaptive Neuro Fuzzy Inference System
AppendixA
.(Continued)
Transport
RMT
MMTF
C
ECMT
C
TK
ftraining
fANFIS
Tra
nsport
RMT
MMTF
C
ECMT
CTK
ftraining
fANFIS
reques
t
request
73
.
0.2231
0.0
527
58
0.2148
0.3
17
0.3
28
90
.
0.1
069
0.9
207
48
0.8
871
0.4
45
0
.454
74
.
0.3495
0.1
387
26
0.1521
0.3
14
0.3
31
91
.
0.5
502
0.0
624
42
0.3
761
0.3
79
0
.390
75
.
0.9296
0.0
291
41
0.4016
0.4
96
0.5
05
92
.
0.1
522
0.3
088
97
0.2
154
0.4
67
0
.476
76
.
0.2383
0.3
263
76
0.2602
0.4
45
0.4
56
93
.
0.3
311
0.7
984
36
0.8
076
0.4
65
0
.476
77
.
0.2373
0.1
277
40
0.7209
0.2
49
0.2
66
94
.
0.6
187
0.0
217
74
0.4
415
0.4
64
0
.475
78
.
0.3293
0.0
086
60
0.1234
0.3
55
0.3
66
95
.
0.2
585
0.0
097
86
0.5
109
0.3
57
0
.366
79
.
0.7084
0.7
965
63
0.9349
0.6
51
0.6
62
96
.
0.5
271
0.2
217
59
0.7
324
0.4
25
0
.436
80
.
0.8383
0.7
469
21
0.7534
0.5
95
0.6
04
97
.
0.6
900
0.7
537
49
0.7
298
0.6
17
0
.628
81
.
0.2929
0.0
414
82
0.1017
0.4
10
0.4
21
98
.
0.0
705
0.7
492
82
0.8
604
0.4
68
0
.479
82
.
0.8887
0.2
989
79
0.0079
0.6
97
0.7
06
99
.
0.6
093
0.9
149
67
0.1
894
0.7
36
0
.745
83
.
0.6281
0.1
611
34
0.5610
0.3
97
0.4
08
100
.
0.9
769
0.7
602
39
0.1
754
0.7
50
0
.761
84
.
0.5810
0.1
277
92
0.9062
0.4
81
0.4
92
101
.
0.0
126
0.3
678
94
0.3
817
0.4
12
0
.423
85
.
0.4488
0.7
788
87
0.1212
0.6
96
0.7
07
102
.
0.2
974
0.3
709
77
0.9
542
0.4
12
0
.423
86
.
0.0810
0.6
392
72
0.0457
0.4
96
0.5
05
103
.
0.8
057
0.9
312
77
0.0
597
0.8
48
0
.859
87
.
0.9190
0.5
066
44
0.6947
0.6
14
0.6
25
104
.
0.4
681
0.3
179
73
0.5
386
0.4
88
0
.497
88
.
0.9958
0.4
511
98
0.9153
0.7
37
0.7
48
105
.
0.4
102
0.8
868
12
0.2
718
0.5
12
0
.521
89
.
0.1817
0.6
262
57
0.0295
0.4
91
0.5
02
106
.
0.2
836
0.3
709
80
0.1
778
0.4
93
0
.504
1250053-25
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
26/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
AppendixA
.(Continued)
Transport
R
MT
MMTF
C
ECMT
C
TK
ftraining
fANFIS
Tra
nsport
RMT
MMTF
C
ECMT
CTK
ftraining
fANFIS
reques
t
request
107
.
0.2199
0.0
718
23
0.6240
0.1
94
0.2
05
126
.
0.3
672
0.1
995
81
0.5
460
0.4
36
0
.447
108
.
0.1191
0.3
902
50
0.2002
0.3
64
0.3
75
127
.
0.8
868
0.6
656
69
0.5
148
0.7
31
0
.740
109
.
0.7481
0.5
147
78
0.3468
0.6
77
0.6
86
128
.
0.9
452
0.8
830
70
0.4
294
0.8
28
0
.839
110
.
0.8175
0.4
269
26
0.3478
0.5
44
0.5
55
129
.
0.5
273
0.8
628
65
0.5
749
0.6
48
0
.659
111
.
0.2159
0.3
829
43
0.7157
0.3
26
0.3
37
130
.
0.2
375
0.8
440
28
0.4
611
0.4
60
0
.471
112
.
0.7881
0.8
936
21
0.8227
0.6
14
0.6
25
131
.
0.7
535
0.7
988
24
0.4
370
0.6
20
0
.631
113
.
0.6130
0.4
332
93
0.5201
0.6
25
0.6
36
132
.
0.2
572
0.7
403
63
0.0
550
0.5
64
0
.575
114
.
0.7129
0.0
025
55
0.4676
0.4
41
0.4
52
133
.
0.6
959
0.7
766
77
0.4
711
0.7
22
0
.733
115
.
0.4967
0.5
283
93
0.7637
0.5
88
0.5
99
134
.
0.4
689
0.4
429
21
0.5
352
0.3
96
0
.405
116
.
0.7122
0.0
863
89
0.4111
0.5
57
0.5
68
135
.
0.4
376
0.4
717
58
0.2
588
0.5
14
0
.525
117
.
0.0351
0.1
628
69
0.0903
0.3
25
0.3
36
136
.
0.3
219
0.4
097
86
0.2
480
0.5
26
0
.535
118
.
0.5883
0.6
395
86
0.3425
0.6
78
0.6
89
137
.
0.9
924
0.8
284
46
0.5
532
0.7
56
0
.767
119
.
0.3248
0.8
340
49
0.2046
0.5
66
0.5
77
138
.
0.0
883
0.9
011
88
0.4
175
0.5
79
0
.568
120
.
0.9471
0.9
362
45
0.4397
0.7
81
0.7
92
139
.
0.8
243
0.7
478
27
0.2
827
0.6
52
0
.663
121
.
0.2934
0.8
952
46
0.8776
0.4
99
0.5
10
140
.
0.3
583
0.0
263
36
0.5
285
0.2
70
0
.281
122
.
0.1169
0.4
249
15
0.9892
0.2
07
0.2
16
141
.
0.0
998
0.8
350
10
0.2
111
0.3
89
0
.400
123
.
0.5291
0.9
245
81
0.4257
0.7
22
0.7
33
142
.
0.2
155
0.6
113
95
0.9
298
0.5
03
0
.512
124
.
0.8001
0.9
910
93
0.1575
0.8
94
0.9
05
143
.
0.6
612
0.9
371
91
0.7
499
0.7
65
0
.776
125
.
0.6958
0.0
250
64
0.9622
0.4
15
0.4
26
144
.
0.6
578
0.2
661
52
0.4
367
0.4
96
0
.507
1250053-26
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
27/32
Application of Adaptive Neuro Fuzzy Inference System
AppendixA
.(Continued)
Transport
RMT
MMTF
C
ECMT
C
TK
ftraining
fANFIS
Tra
nsport
RMT
MMTF
C
ECMT
CTK
ftraining
fANFIS
reques
t
request
145
.
0.4296
0.0
041
90
0.9457
0.3
82
0.3
93
163
.
0.9
658
0.6
718
89
0.8
295
0.7
79
0
.788
146
.
0.7685
0.9
092
95
0.0910
0.8
70
0.8
59
164
.
0.9
650
0.6
077
58
0.4
078
0.7
24
0
.735
147
.
0.0755
0.7
115
63
0.0131
0.4
96
0.5
05
165
.
0.5
480
0.0
235
48
0.9
143
0.3
27
0
.338
148
.
0.3463
0.6
957
24
0.0731
0.4
83
0.4
94
166
.
0.6
790
0.7
874
70
0.2
876
0.7
20
0
.731
149
.
0.1777
0.4
094
78
0.7143
0.4
09
0.4
20
167
.
0.8
422
0.7
671
86
0.5
055
0.7
89
0
.798
150
.
0.0972
0.0
737
23
0.7651
0.1
37
0.1
48
168
.
0.5
371
0.2
171
82
0.2
500
0.5
33
0
.544
151
.
0.6539
0.5
951
8
0.6324
0.4
64
0.4
75
169
.
0.5
478
0.0
566
87
0.8
779
0.4
38
0
.449
152
.
0.2826
0.4
037
67
0.0657
0.4
81
0.4
90
170
.
0.4
395
0.2
819
38
0.6
992
0.3
63
0
.372
153
.
0.8100
0.2
526
89
0.1581
0.6
66
0.6
77
171
.
0.1
587
0.1
542
23
0.3
119
0.2
28
0
.239
154
.
0.2007
0.1
389
63
0.5684
0.3
13
0.3
24
172
.
0.1
775
0.0
317
25
0.9
966
0.1
34
0
.145
155
.
0.5185
0.4
171
83
0.1250
0.6
02
0.6
13
173
.
0.4
930
0.2
880
38
0.3
404
0.4
20
0
.431
156
.
0.7630
0.0
928
48
0.3848
0.4
76
0.4
87
174
.
0.5
132
0.8
995
57
0.3
116
0.6
61
0
.670
157
.
0.8211
0.4
804
30
0.4517
0.5
61
0.5
72
175
.
0.5
097
0.0
198
80
0.5
007
0.4
34
0
.445
158
.
0.8009
0.4
360
36
0.1060
0.5
91
0.6
00
176
.
0.9
354
0.1
485
26
0.5
465
0.4
82
0
.493
159
.
0.6579
0.8
603
14
0.8561
0.5
38
0.5
49
177
.
0.4
699
0.2
690
48
0.4
384
0.4
21
0
.432
160
.
0.0446
0.1
011
39
0.5303
0.1
90
0.2
01
178
.
0.9
080
0.8
943
44
0.8
914
0.7
07
0
.718
161
.
0.3187
0.6
439
34
0.3463
0.4
55
0.4
66
179
.
0.2
421
0.0
257
45
0.3
805
0.2
67
0
.278
162
.
0.0746
0.2
211
28
0.7594
0.1
86
0.1
97
180
.
0.0
082
0.4
992
77
0.8
407
0.3
61
0
.370
1250053-27
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
28/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
AppendixA
.(Continued)
Transport
R
MT
MMTF
C
ECMT
C
TK
ftraining
fANFIS
Tra
nsport
RMT
MMTF
C
ECMT
CTK
ftraining
fANFIS
reques
t
request
181
.
0.0510
0.3
640
41
0.4677
0.2
83
0.2
94
199
.
0.3
886
0.8
010
21
0.8
030
0.4
48
0
.459
182
.
0.8145
0.7
660
63
0.5634
0.7
16
0.7
27
200
.
0.2
820
0.0
055
61
0.7
966
0.2
73
0
.262
183
.
0.1838
0.1
397
64
0.0599
0.3
60
0.3
71
201
.
0.3
678
0.1
577
44
0.5
703
0.3
29
0
.340
184
.
0.6399
0.9
684
32
0.7447
0.6
20
0.6
31
202
.
0.5
258
0.4
244
20
0.4
423
0.4
17
0
.428
185
.
0.1450
0.2
499
41
0.7135
0.2
57
0.2
66
203
.
0.6
407
0.2
684
99
0.4
112
0.6
11
0
.622
186
.
0.3732
0.6
965
98
0.6422
0.6
20
0.6
31
204
.
0.6
903
0.2
295
58
0.1
485
0.5
41
0
.552
187
.
0.0545
0.7
869
62
0.0401
0.5
06
0.5
17
205
.
0.0
546
0.9
642
47
0.6
908
0.4
57
0
.446
188
.
0.3501
0.3
713
12
0.6354
0.3
00
0.3
11
206
.
0.9
607
0.1
857
60
0.5
378
0.5
88
0
.599
189
.
0.6842
0.3
967
81
0.2204
0.6
39
0.6
50
207
.
0.3
571
0.0
958
71
0.6
743
0.3
64
0
.375
190
.
0.2707
0.1
414
55
0.0579
0.3
69
0.3
78
208
.
0.9
487
0.8
688
91
0.0
235
0.9
18
0
.929
191
.
0.7091
0.8
808
97
0.6023
0.7
95
0.8
60
209
.
0.8
985
0.5
060
44
0.3
510
0.6
41
0
.652
192
.
0.3288
0.1
693
83
0.3106
0.4
42
0.4
53
210
.
0.2
604
0.7
167
94
0.0
633
0.6
35
0
.644
193
.
0.0931
0.3
497
63
0.7006
0.3
25
0.3
14
211
.
0.3
901
0.3
457
96
0.3
396
0.5
46
0
.557
194
.
0.4239
0.4
596
69
0.0733
0.5
51
0.5
62
212
.
0.0
784
0.3
734
77
0.7
237
0.3
60
0
.371
195
.
0.8447
0.5
661
14
0.1537
0.5
85
0.5
96
213
.
0.6
320
0.6
999
10
0.8
374
0.4
72
0
.483
196
.
0.9029
0.6
165
68
0.4828
0.7
23
0.7
32
214
.
0.5
760
0.4
807
57
0.7
147
0.5
17
0
.526
197
.
0.1880
0.5
403
80
0.8307
0.4
45
0.4
56
215
.
0.9
294
0.0
117
89
0.1
064
0.6
41
0
.652
198
.
0.8074
0.4
451
77
0.4466
0.6
64
0.6
53
216
.
0.1
408
0.9
371
69
0.2
606
0.5
77
0
.588
1250053-28
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
29/32
Application of Adaptive Neuro Fuzzy Inference System
AppendixA
.(Continued)
Transport
RMT
MMTF
C
ECMT
C
TK
ftraining
fANFIS
Tra
nsport
RMT
MMTF
C
ECMT
CTK
ftraining
fANFIS
reques
t
request
217
.
0.5541
0.3
715
16
0.4527
0.4
00
0.4
11
238
.
0.2
471
0.3
997
87
0.4
705
0.4
77
0
.466
218
.
0.7737
0.0
412
20
0.0321
0.4
30
0.4
41
239
.
0.2
404
0.0
781
62
0.8
200
0.2
81
0
.292
219
.
0.8891
0.2
448
17
0.0325
0.5
24
0.5
35
240
.
0.1
120
0.3
330
45
0.6
416
0.2
87
0
.304
220
.
0.7809
0.2
288
12
0.8511
0.3
87
0.3
96
241
.
0.5
851
0.0
026
92
0.8
409
0.4
51
0
.460
221
.
0.7456
0.0
840
69
0.5115
0.5
08
0.5
19
242
.
0.4
754
0.3
572
79
0.3
101
0.5
40
0
.557
222
.
0.6071
0.1
918
37
0.1538
0.4
47
0.4
58
243
.
0.0
663
0.1
448
29
0.7
755
0.1
62
0
.179
223
.
0.6025
0.5
495
10
0.4296
0.4
58
0.4
67
244
.
0.9
030
0.7
253
15
0.7
132
0.6
00
0
.609
224
.
0.5639
0.9
766
25
0.9121
0.5
62
0.5
73
245
.
0.6
849
0.6
495
26
0.7
252
0.5
27
0
.516
225
.
0.8334
0.8
487
51
0.4990
0.7
24
0.7
35
246
.
0.8
056
0.8
330
34
0.9
402
0.6
23
0
.634
226
.
0.2099
0.5
794
89
0.8592
0.4
84
0.4
95
247
.
0.1
950
0.0
141
85
0.5
646
0.3
29
0
.340
227
.
0.2310
0.1
310
58
0.5107
0.3
14
0.3
23
248
.
0.8
455
0.3
718
100
0.3
643
0.7
21
0
.730
228
.
0.7203
0.7
654
82
0.4170
0.7
45
0.7
56
249
.
0.3
078
0.9
302
40
0.4
068
0.5
46
0
.557
229
.
0.9372
0.8
576
57
0.7968
0.7
48
0.7
59
250
.
0.2
377
0.7
404
61
0.7
237
0.4
85
0
.474
230
.
0.8001
0.7
958
86
0.6571
0.7
68
0.7
79
251
.
0.1
467
0.8
734
38
0.3
172
0.4
77
0
.488
231
.
0.3370
0.9
944
64
0.9242
0.5
84
0.5
95
252
.
0.5
894
0.0
162
77
0.5
834
0.4
45
0
.454
232
.
0.1403
0.1
855
75
0.4482
0.3
47
0.3
56
253
.
0.7
586
0.7
369
44
0.6
550
0.6
31
0
.642
233
.
0.4001
0.3
165
48
0.5440
0.4
01
0.4
12
254
.
0.5
225
0.4
025
12
0.0
284
0.4
31
0
.442
234
.
0.7808
0.3
362
75
0.7799
0.5
84
0.5
93
255
.
0.1
036
0.1
809
62
0.1
875
0.3
27
0
.338
235
.
0.0566
0.2
599
93
0.4886
0.3
81
0.3
92
256
.
0.7
389
0.4
540
100
0.9
822
0.6
47
0
.664
236
.
0.5002
0.6
127
63
0.7568
0.5
41
0.5
30
257
.
0.5
256
0.5
343
53
0.5
615
0.5
21
0
.530
237
.
0.3455
0.8
515
76
0.8720
0.5
79
0.5
96
258
.
0.5
093
0.1
627
45
0.7
144
0.3
68
0
.357
1250053-29
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
30/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
References
Abara, J (1989). Applying integer linear programming to the
fleet assignment problem.Interfaces, 19(4), 2028.
Altug, S, MY Chow and HJ Trussell (1999). Fuzzy inference
systems implemented onneural architectures for motor fault
detection and diagnosis. IEEE Transaction onindustrial Electronics,
6, 10691079.
Beaujon, GJ and MA Turnquist (1991). A model for fleet sizing
and vehicle allocation.Transportation Science, 1, 1945.
Booler, JM (1980). The solution of railway locomotive scheduling
problem. Journal ofOperations Research Society, 31, 943948.
Bradley, SP, A Hex and T Magnanti (1977). Applied Mathematical
Programming. MA:Addison-Wesley.
Chiclana, F, F Herrera, E Herrera-Viedma and S Alonso (2007).
Some induced orderedweighted averaging operators and their use for
solving group decision-making prob-lems based on fuzzy preference
relations. European Journal of Operational Research,182,
383399.
Cooke, WP (1985). Quantitative Methods for Management Decision.
New York: McGraw-Hill Book Company.
Crainic, TG (2000). Service network design in freight
transportation. European Journal ofOperational Research, 122,
272288.
Crainic, TG and G Laporte (1997). Planning models for freight
transportation. EuropeanJournal of Operational Research, 97,
409439.
Delgado, M, F Herrera, E Herrera-Viedma, MJ Martn-Bautista, L
Martnez and MA Vila(2002). Communication model based on the 2-tuple
fuzzy linguistic representationfor a distributed intelligent agent
system on internet. Soft Computing, 6, 320328.
Green, LV and D Guha (1995). On the efficiency of imbalance in
multi-facility multi-serverservice systems. Management Science, 41,
179187.
Henn, V (2000). Fuzzy route choice model for traffic assignment.
Fuzzy Sets and Systems,116, 77101.
Herrera, F, E Herrera-Viedma and L Martnez (2008). A fuzzy
linguistic methodology todeal with unbalanced linguistic term sets.
IEEE Transactions on Fuzzy Systems, 16,354370.
Hillier, FS and GJ Lieberman (1990). Introduction to Operations
Research, New York:
McGraw-Hill.Ichoua, S, M Gendreau and JY Potrin (2003). Vehicle
dispatching with timedependenttravel times. European Journal of
Operational Research, 2, 379396.
Jang, JSR (1993). ANFIS: Adaptive network based fuzzy inference
systems. IEEE Trans-actions on Systems, Man, and Cybernetics, 3,
665685.
Jaszkiewicz, A (1997). A metaheuristic approach to multiple
objective nurse scheduling.Foundations of Computing and Decision
Sciences, 3, 169184.
Khosravi, A, HA Talebi and M Karrari (2005). Fault detection and
isolation for unknownnonlinear systems using expert methods.
Proceedings of the 2005 IEEE Conferenceon Control Applications,
Canada, 14861490.
Lee, B, A Fujiwara, Y Sugie and M Namgung (2003). A sequential
method for combining
random utility model and fuzzy inference model.Journal of
Advanced ComputationalIntelligence and Intelligent Informatics, 3,
117121.
Lobel, A (1998). Vehicle scheduling in public transit and
lagrangean pricing. ManagementScience, 44, 16371649.
Lotfi, V and C Pegels (1989). Decision Support Systems for
Management Science/Operations Research. Homewood: Irwin.
1250053-30
AsiaPac.
J.Oper.Res.Downloade
dfromw
ww.worldscientific.com
by178.2
22.6
7.1
65on03/20
/13.
Forpersonaluseonly.
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
31/32
-
8/10/2019 ApAPPLICATION OF ADAPTIVE NEURO FUZZY INFERENCE SYSTEM
IN THE PROCESS OF TRANSPORTATION SUPPORTj
32/32
D. Pamucar, V. Lukovac & S. Pejcic-Tarle
Dragan S. Pamucar was born in Rijeka, Croatia. He received his
BS degree from
the Technical Military Academy in Belgrade, 2003 and MS degree
from the Faculty
of Transport and Traffic Engineering in Belgrade, 2009. His main
research inter-
ests, as a PhD student at the Military Academy in Belgrade, are:
Organization
Design, Fuzzy Logic, Genetic algorithms, Neural nets,
Multicriteria Decision Mak-
ing Models, etc.
He is an assistant professor at the Military Academy in
Belgrade, teaching Opera-
tions Research and Organization in Transport. He has published
several academic
articles or papers in international journals, including Yugoslav
lournal of operations
researh and International Journal of Physical Sciences.
Vesko M. Lukovac was born in Kolasin, Montenegro. He received
his BS degree
from the Technical Military Academy in Belgrade, 2000 and MS
degree from the
Faculty of Transport and Traffic Engineering in Belgrade, 2010.
His main