Embed Size (px)
Citation preview

APPLICATION OF KHOBOTOVS ALGORITHM TOVARIATIONAL INEQUALITIES ANT)
NETWORK EQUILIBRIUM PROBLEMS*PATRICE MARCOTTE
Centre de Recherche sw les TransportsUniversite de Montreal, C.F. 6128, Succ. %", Montreal, Quibec, H3C3J7
etCollege militaire royal de Saint-Jean
ABSTRACT
In tbis paper we propose a primal-dual implementation of Khobotov's algorithm for solving mono-tone variational inequalities over subsets of i?". Besides its theoretical appeal, the algorithm lendsitself nicely to a network implementation. An estimate of the local rate of convergence is given andnumerical examples are presented.
RESUME
Dans cet article nous proposons une implantation primale-duale de Talgorithme de Khobotov pourla resolution d'inequations variationnelles dans i?". En plus de proprietes theoriques iinteressantes,l'algorithme se prete a une interpretation particuliere lorsqu' implante sur des reseauoc. Nous don-nons un estime du taux de convergence local de la methode ainsi que des resultats numeriquespreliminaires.
INTRODUCTION
In recent years, the framework of variational inequalities (or generalized equations) in finite di-mension spaces has been widely used for modelling economic equilibrium problems that cannot beformulated as "standard" mathematical programs. Such an approach has been fruitful, especiallyin the context of computation of Nash equilibria (Harker [8], Marcotte [12]) and traffic equilibria(Bertsekas and Gaftii [4], Dafermos [6], Hearn et al [9], Marcotte and Guelat [15], Ngujren andDupuis [16], etc.) and prompted the search for efficient solution procedures. The theoretical andpractical challenge in solving variational inequalities is due mainly to the fact that no natural objec-tive is available and therefore monitoring the convergence of an iterative process to an equilibriumsolution is diiBcult. For instance, iterative methods that proceed by solving a sequence of optimiza-tion problems (diagonalization, projection) rely for convergence on theoretical conditions diffictiltto verify in practice. Some authors have proposed the use of surrogate objectives (Marcotte andDussault [14], Pang [17] and, more recently, Fukushima [7]) but these approaches are difficult toimplement on large scale problems.
In this paper, we adopt a different point of view and propose a primal-dual implementation ofan extension of the extragradient method due to Khobotov [10]. The method requires, at each iter-ation, two projections but, unlike the classical projection algorithm, does not rely on a contractionargument for convergence. Instead, as is the case for proximal methods (Rockafelkir [19], Spingarn[20]), global convergence is guaranteed by the fact that the distance from an iterate to the entiresolution set decreases by a controllable amount.
We will present a primal-dual network implementation of the method that bears resemblancewith primal-dual methods for solving linear convex flow problems. A rate of convergence resultwill be presented and numerical results are produced for both a primal implementation (on non-network problems) and a primal-dual implementation (on network test problems).
Ace. Jan. 1991 INFOR vol. 29, no. 4, Nov. 1991
258

VARIAllONAL INEQUALITIES AND NETWORK EQUILIBRIUM PROBLEMS 259
1. KHOBOTOVS ALGORITHM
This section presents an overview of Khobotov's algorithm. A tutorial of the main definitions andconcepts required to understand this paper may be found in Auslender [2] or Pang and Chan [18],among other references.
Let $ be a closed convex subset of i?" and F a monotone, Lipschitz continuous mapping from$ into R". A point jc in # is a solution to the variational inequality problem VIP{^,F) if it satisfiesthe variational inequality:
{F{x),x -y)<Q Vy e #. (1)Under the monotonicitjif assumption, the solution set 5 of VIP{^,F) is always convex. Assume thatit is also nonempty.
X
X fe-Hl x''
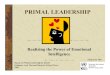
Figure 1. Geometry of Khobotov's Algorithm
A traditional approach for solving VIP{^,F) is through the projection algorithm:
(2)
where Proj^ denotes the projection operator on $ in any suitable matrix nomn and a is a constantwhose value depends on both the Lipschitz and strong monotonicity constants of i . Those valuesmight be difficult to estimate in practice. Khobotov's algorithm can be considered a two-step variantof the basic projection algorithm, and is defined by the relationship (see figure 1 for an illustration):
(3)
where the relaxation parameter can easily be estimated locally and is not dependent on the existenceof a strong monotonicity constant. The fundamental result is stated below and, for the salce ofcompleteness, a proof is given in the appendix.Theorem (Khobotov [10]). Let ^bea closed convex subset ofR" and F a monotone function from $into R". Letx^ € $ and {x''}k>i be the sequence defined by (3). Then we have, for any nonnegative
{} dsequence andx* e 5:
(4)

260 P. MARCQTTE
If ak is small enough, say strictly less than the Lipschitz constant inverse 1/L, then the inequation(4) shows that the distance to the solution set S strictly decreases at each iteration and we musthave that limi_,oo x'^ = ^ (otherwise the left-hand side of (4) would eventually become strictlynegative). From the continuity of the projection operator there follows that any limiting point x*of the sequence {x*} satisfies .JC* = Proj (AC* — akF{x*)). If the sequence {ak} stays boundedaway from zero,.x* must be a solution to VIP{^,F). It is remarkable that the convergence proofis not based on a contraction argument, but on the fact that the successive iterates get closer tothe solution set by a positive quantity that can be bounded from below (see inequation (4)) by acontrollable amount. At each iteration it is tempting to make the quantity:
as large as possible. In that respect, an educated guess would consist in setting ak to the value{1/V2){\\x'' -3c*||/||jP(x*) -F{^)\\) that would be optimal, in the sense that the right-hand side of(4) is minimized, under the assumptions that (i) F is affine (ii) $ is polyhedral (iii) A;* and^ lie onthe same face of $. In our numerical tests this proved to be a reasonable strategy. The basic primalalgorithm is outlined below:
Primal Algorithm1. Select parameters p{0 < p <1) and ao (ao > 0).
Let A:° e $ and set k to 0.
3. if a^{\\F{x'') -F(Jc*)||Vik* -x^f) <thenA:*+i = Proj^(;t'' - akF(xk)),kelse reduce the value of a^, e.g.:
4. go to step 2.
At step 3 of the algorithm it is important to note that the relaxation parameter a always staysbounded away from zero, due to the fact that F is Lipschitzian. The convergence of the sequence{A:* } can be monitored through the upper bound on the decrease of the distance to the equilibriumset provided by inequation (4) or, if $ is bounded, by evaluating the gap function (see Marcotte[11])
at the current iterate x*'. The gap function is nonnegative, and zero if and only if x* is solution tothe variational inequality.
We conclude this section with an analysis of the rate of convergence of the method when thefunction F is strongly monotone, i.e. there exists a constant / such that
Theorem. Let F be strongly monotone on # with strong monotonicity constant I. Then the sequence x''defined by the primal algorithm converges linearly to the unique equilibrium solutionx*. More preciselythere exists an indexK such that, for allk >K we have:

VARL\TIONAL INEQUALITIES AND NETWORK EQUILIBRIUM PROBLEMS 261
where a is any positive constant satisfying 0 < a < liminf {ak} and (3 — {L + l/a)/l.
Proof. Existence and uniqueness oix* is a consequence of the strong monotonicity assumption.This is a standard result (see Auslender [2] for example).
From (4) we have
= i^c'=-x*|p{l-(l-a|L2)|^^-^}. (9)
Now, sinceX* = Proj^(x'' - akF{x'')) we have:
/^ y j ^ — x^ -I- atrFix^^) " 0 Vv G ^
or:
Then:
Hence:
Sety = X* in the preceding inequation to obtain:
- x *
We have:( '= - x^Fix'^) - F{x*)) = (x* -x*,F(x*)) - (x* -
Therefore:
*f-xf {
and:
*f <-xf j{whenever k >K. Now:
which imphes
>

262 P. MARCOTTE
Using (10) in (9) there comes:
IF II
Remark The preceding estimate of the local convergence rate is in many situations overly pes-simistic. For instance, in the simple case where F(x) = ||x|p (over any convex set) the precedingestimate would be close to 1 for at close to 1, whereas setting ak yields the standard projectionalgorithm and convergence to the optimal solution is obtained in a single iteration.
2. A PRIMAL-DUAL ALGORITHM
In general it is computationally burdensome to perform a projection onto an arbitrary convex set.In the following we assume that the set $ is polyhedral:
^ = {Bx = b,x > 0}
where S is an m x n matrix. The analysis carries through if $ can be expressed by a set of non-linear equations, and a certain constraint qualification holds. Then VIP{^,F) can, using linearprogramming duality, be put in the form:
F{x) - B*A > 0(x,F(x)-B'A)=O
Bx = b (11)x > 0
A unconstrained
which is easily seen to be equivalent to the monotone variational inequality VJi^, G) where ^ =/ x\ ( Fix) — B*X\{x > 0, A unconstrained} and G I . = I ^J , I. In this primal-dual setting, Khobotov's\AJ \ Bx-b J
algorithm reduces to:xf = max{O,xf - ak^x^) - {B'\')i]}
andxf+1 = max {O,xf - a,[F,(x) - (5A),]}
b)j.
Remark. It can be shown, using a technique a proof similar to that used by Marcotte and Dussault[14], that the dual vectors A* are bounded if the set $ is bounded (the set * need not be bounded).
3. AN APPLICATION TO NETWORK EQUILIBRIUM
In this section we consider multicommodity network equilibrium problems (traffic assignment, spa-tial equilibrium, etc.) that can be formulated as variational inequalities. In this case, the matrix Bis a block-diagonal array containing P copies of the network node-arc incidence matrix, where Pdenotes the number of commodities, 5,a = - l i farca = {i,j),Bia = -l-lifa = («j). The right-handside (production) vector IP corresponding to block (commodity)/? is positive at origin (production)

VARIATIONAL INEQUALITIES AND NETWORK EQUILIBRIUM PROBLEMS 263
nodes, negative at destination (demand) nodes and zero at transshipment (intermediate) nodes.Equations (12a) and (12b) can then be written as:
arc {i,j) : ^ = max {O,^'^ - afc[Fy(X*) + xf - xf]} (13a)
node i: Y-'^' = Af' - «. [ E 4 ' ' - E ^ ' ' " ^]"
arc (ij) : 4'^+^ = max { |
node i : >^''+' = Af'' - «,[ ^ ^ jf - ^ ^i' - b,] (14i)
wherep is a commodity index,X*^ andXfc denote link total fiow vectors and A{i) (respectively B(t))represents the forward star (respectively backward star) of node i.
The quantity r|'* = Fy (X' )+Af'* - Aj'* can be interpreted as the "reduced" cost for commod-ity/? on arc (i,;) and 6, = Yl,j£A{i) Ai^ ~ Y.jeB(i) '* - ^ as the divergence at node i for commodityp. Equations (14a) and (14b) can be given an intuitive network interpretation. If x and A are closetox and A respectively, then it seems reasonable to increase A, whenever divergence is negative, inorder to reduce the amount of flow coming into node i, through the increase of the reduced costsof all arcs having / as their tail. If divergence is positive then the variable A, is decreased. Also, fiowis increased (respectively decreased) on arcs with negative (respectively positive) reduced costs, asin the out-of-kilter algorithm.
4. NUMERICAL EXAMPLES
In this section, numerical results are presented. The first set of examples (section 4.1) involvevariational inequality problems on the unit simplex, while the subsections 4.2-4.5 address networkequilibrium problems, both symmetric and asymmetric. Experiments were conducted on a SUN3/50 microcomputer running under the UNIX operating system; reported times include both CPUtime and input/output time, the latter taking a fairly large share of total running time for the smallertest problems.
4.1 Nonnetwork Test Problems
A first set of problems was solved involving a linear, asymmetric cost function limited to the unitsimplex in R^^, 5 = {x > 0, Y^ti^i = !}• The starting point, in all cases, was chosen as the centerof the simplex: x" = (^ , . . . , ^ ) . The mapping F (x) assumed the general form:
andB represent randomly generated square matrices whose elements are uniform randomvariables on the interval (0,5). Numerical results on 5 test problems are presented in table 1. Forthose five problems, the number of constraints active at equilibrium was, respectively: 12, 8,11, 9,11 and did not seem to infiuence to a great extent the convergence behaviour of the algorithm.
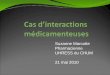
4.2 Braess Network
Consider the Braess paradox network with the separable linear cost function illustrsited in figure 2.Demand from node 1 to node 4 is equal to 6 units of fiow, and the delay functions are given by theexpressions:
Fi2(a;) = 10X12
F34(x) = 10X34
=50+X24.

264 P. MARCOTTE
ITER.
05
1020304050607080
100120150200
Ik8.72.35.53.62.11.27.13.90.8
Table 1.
-X
X
X
X
X
X
X
X
X
x*||
10-110-110-210-310-^10-510-'10-810-9
Five
|(x
3.57.74.41.98.13.41.56.02.51.01.72.81.91.5
Test Problems on the
-
X
X
X
X
X
X
X
X
X
X
X
X
X
X
x*||
10-210-210-210-210-310-310-3lo-' '10-'*10-410-510-610-710-9
Ik4.54.67.44.73.73.63.53.12.4
-
X
X
X
X
X
X
X
X
X
x*||
10-110-210-310-'*10-510-610-710-810-9
Jnit Simpiex.
Ik5.52.41.01.83.46.71.32.65.11.03.91.0
-
X
X
X
X
X
X
X
X
X
X
X
X
x*||
10-110-110-110-210-310-'*10-410-510-610-610-810-9
Ik6.11.24.16.66.96.66.36.05.85.3
-
X
X
X
X
X
X
X
X
X
X
x*||
10-110-110-210-310-'*10-510-610-710-810-9
2 1
Figure 2. The Braess Paradox Network
The ordering of the arcs is: (1,2), (1,3), (2,3), (2,4), (3,4).Starting with the initial solution
a;= (6,0,6,0,6)A = (0,0,0,0)
we obtain the sequence of iterates given in table 2. In this example the matrix B and the vector bhave been premultiphed by the constant 5. This is equivalent to a scaling of the cost function F.This multiplicative constant seems to affect the algorithm to a great extent. Future work will bedevoted to determining a good value for this parameter.
The equilibrium solution for this problem is:
:E* = (4,2,2,2,4)A* = (0,40,52,92)
if one always sets to zero the dual variable associated with the origin node 1.At the last iteration, feasibility can be restored by projecting the final fiow vector on $.

VARIATIONAL INEQUALITIES AND NETWORK EQUILIBRIUM PRQBLEMS 265
Table 2. Numerical Results for the Braess Network Example.
ITER.
1
2
3
4
5
10
15
20
30
x:A:x:A:x:A:
x:A:x:A:
x:A:
x:A:x:A:x:A:
CPU
3.460.003.140.002.990.003.080.00
3.070.00
4.300.004.110.004.010.00
4.000.00
time per
0.004.72
0.0014.280.00
21.450.00
24.89
0.0026.61
1.7944.20
2.0540.84
2.0140.08
2.0040.00
5.060.733.743.762.00
10.250.42
22.580.37
34.44
2.5551.03
2.1051.67
2.0351.99
2.0052.01
iteration: Khobotov:
0.005.450.00
18.060.00
31.70
0.0047.46
0.0061.05
1.7995.23
2.0592.51
2.0192.09
2.0092.01
3.46
3.14
2.99
3.08
3.07
4.30
4.11
4.01
4.00
||x-x*||KHQBQ.
4.24
3.54
3.17
3.49
3.52
0.07
0.02
0.04
.002
.018 sec, Frank-Wolfe: .006
\\x-x*\\FW
3.38
1.00
.062
.042
.030
.068
.017
.005
.0004
sec.
Remark 1. The work per iteration involves m + n variable adjustments and m function evaluationsand is therefore O{m) for a single commodity problem.Remark 2. It can be observed that the distance to equilibrium ||x* - x* || does not decrease mono-tonically. This is not in contradiction with the theory. In our primal-dual setting the distance tothe equilibrium set involves both primal and dual variables and is indeed monotonically decreasing,although this measure is not reported in table 2.
3 6
Figure 3. Second Test Network
4.3 Second Network Example
The second example corresponds to the network illustrated in figure 3. The congestion function is

266 P MARCQTTE
Tabie 3. Data for Second Test Network
arc
1236
1819479
111214178
13165
1015
arc
(1,2)(1,3)(2,3)(3,1)(6,7)(7,5)(2,4)(3,4)(4,2)(4,5)(4,6)(5,4)(6,4)(3,6)(5,2)(6,3)(2,5)(4,3)(5,7)
a
3333334444444888843
b
3333334444444888841
c
75757575757525252525252525505050205
95
Demand1 y4 :7 ^ 1 :1 ^ 7 :7 — 4 :
20608030
Tabie 4. Numerical results, second example.
ITER.
1050
100150200250300
||x-x*||Khobotov
136.645.37.31.8.36.07.01
||x-x*||FW
13.412.110.79.89.08.58.0
arc-separable and assumes the general (BPR) form:
The data for this problem is given in table 3 and numerical results are to be found in table 4.
4.4 Third Network ExampleThis example is based on the preceding 20-arc network but involves a nonseparable cost functionof the general form:
(k,t)GAij

VARIATIONAL INEOUALITIES AND NETWORK EQUILIBRIUM PRQBLEMS 267
Tabie 5. Nonzero my values for example 4.4.
mi,3 = .2"l2,6 = -4OT3,i = .5
"^4,10 = -1W5 15 ^ .3
WI79 ^ .1
W8,16 = -3
"I9,3 = -1
"110,6 = -9
"112,18 = -2
"Jl3,3 = -3
"^14 9 =^ .1
mid 6 ^ - 1
"^17,10 = -1
"118,20 = -4
"Jl9,13 = .4"J20,16 = -6
mi4 = .l"I2,7 = -3
"I4, l l = -1/W5 19 = .2-- . 0
"I8,18 = -4
"Il3,5 = -2"Jl4,10 = -2"!16,2 = -2"Il7,9 = -2
"Il9,14 = -1
"120,17 = 1.1
c
"12^8 = -2
"14,12 = -4
"^7,12 = -2
"Il4,12 = -1
"Jl7, l l = -1
where^,, denotes a subset of neighbors for arc (/,;), i.e. that congestion on arc (/,,/) is dependent,in a nonsymmetric fashion, on flow on neighboring arcs. The nonzero m,y-values ajre given in table5 and numerical results presented in table 6.
Tabie 6. Network with asymmetric cost function:Convergence of flow-values towards equilibrium.
ITER:
-v:i,2
•:«i,3
-<^2,l
JC2,4
-^2,5
• ^ 3 , 1
^3,4
•^3,6
^4,2
^4,3
^4,5
•^4,6
-•^5,2
•-^5,4
X5,7
-1^6,3
JC6,4
X6,7
X7,5
Xl,6
10
67.429.211.220.946.643.612.99.40.07.4
12.90.08.8
21.654.737.914.518.933.149.5
CPU time
20
53.951.226.220.039.637.319.832.4
0.08.4
14.46.4
26.920.248.832.519.037.843.650.1
50
50.149.928.518.631.231.518.631.30.03.99.28.0
28.517.340.727.616.639.345.844.2
100
50.149.928.518.631.531.518.631.30.03.98.98.3
28.517.340.427.616.639.645.844.2
per iteration: .17 seconds
200
50.149.928.518.631.531.518.631.30.03.98.98.3
28.517.340.427.616.639.645.844.2

268 P. MARCQTTE
Tabie 7. Sioux Fails results.
ITER
1050
100150200250300600
IGiobotovg{x)
56492155
13.63.73
.778
.156
.0432 X 10-*
Khobotov\\Bx-b\\
180.4127.2
.38
.096
.0146
.0029
.00084 X 10-^
CPU time per iteration:Khobotov: .88 sec, Frank-Wolfe: .41
FWsix)9.401.42.58.44.03.02.02.01
sec.
4.5 Sioux Falls Network
The third network corresponds to the Sioux Falls network (see Abdulaal and Leblanc [1]). It has24 nodes and 76 arcs and, in our case, 20 origin-destination pairs. It is therefore a multicommodityproblem. For this example we used the gap function
as a measure of equilibrium. However, since this quantity only makes sense when x is close to beingprimal-feasible, we indicate as well, in table 7, the infeasibility associated with the current iteratex'^. Qn all three test problems the convergence pattern was similar. Progress was slow in the firstiterations, but fast once a good approximation was obtained. This was especially true of the dualvariables, converging very slowly to their optimal values. Dual update methods are presently beingconsidered. Also, the good behaviour of the Frank-Wolfe algorithm could be used to "warm-up"the algorithm, even though this would be heuristic in the asymmetric case. Let us notice that on thefirst two network test problems, Frank-Wolfe's good performance was partially due to the fact thatthe first iterate lay in the optimal face which indeed corresponds to the whole set $ in these cases,thus ensuring linear local convergence. In general, Frank-Wolfe cannot be expected to converge ata better than sublinear (harmonic) rate.
5. CONCLUSION
In this paper we presented a projection-based primal-dual algorithm for solving monotone vari-ational inequalities, and its implementation for network equilibrium problems. The extension tomulticommodity problems is straightforward, since the projection separates by commodity if one iswilling to store flows by commodity. Although the algorithm might not be competitive with othercodes for solving symmetric problems, it possesses several theoretical and practical advantages overcurrent algorithms:
1. Global convergence for monotone (not strictly monotone) problems is assured. Other algo-rithms that can deal with monotone variational inequalities for networks, such as Newton'smethod or variants thereof (see Marcotte and Dussault [13] [14]), have only been imple-mented in path-fiow space. To obviate complete path enumeration, those paths are gener-ated as needed (see Hearn [9]). A drawback of this strategy however is that, for variationalinequality problems, the number of required paths cannot be bounded a priori.
2. The parameter au is easily adjusted at each iteration, upwards or downwards, according to theestimated value of the directional Lipschitz constant.
3. The algorithm can take advantage of the network structure.

VARL\TIONAL INEQUALITIES AND NETWQRK EQUILIBRIUM PRQBLEMS 269
4. The method does not require derivatives.5. Although the euchdian norm was used throughout the paper, the convergence result holds
for any matrix norm. This flexibility could be exploited the improve the algorithm's rate ofconvergence. A 'natural" choice of norm could be a positive definite approximation of the(nonsymmetric) Jacobian matrix in the vicinity of a solution.
6. The algorithm is easily parallelized, for instance by assigning a processor to each node andeach commodity of the network.
7. No linesearch is required.
Let us also note that the algorithm performed well on non-network variational inequality problems,even in situations where the classical projection algorithm would fail, for instance for affine, skew-symmetric problems.
Recently, Bertsekas [3] [5] obtained impressive computational results using a dual ascent me-thod closely related to the out-of-kilter algorithm for solving linear as well as convex, separablefiow problems. His approach is not readily applicable to non symmetric problems. However theprice and flow adjustment steps bear some resemblance to our primal-dual adjustments (equations(7a) and (7b)). A drav/back of our method is that nodes cannot be treated in an arbitrary order, asin Bertsekas [5]. In particular, there is no obvious equivalent for the dual function in variationalinequalities. Future work will concentrate on increasing the fiexibility of node and arc treatment,in order to be able to exploit the power of network data structures, always keeping in mind that(costly) function evaluations have to be kept to a minimum.
ACKNOWLEDGEMENT
Research supported by NSERC (Canada) grant A5789 and ARP (Department of national defense)grant FUHBP
APPENDIXA STREAMLINED PROOF OF KHOBOTOVS THEOREM
For any two vectors u and v (v € $) we have:
II" - vf > II" + Proj$(u)ip - ||v - Proj^(«)|p. (15)
Setting M = X* - akF{^), v = x* (x* e 5),x*+i = Proj (M) in (15) and rearranging terms, one obtainsthe inequality:
(16)We have:
{x* - x''+\F{x'')) = (x* -x*=,F(x^)) + (x* -x*+\F(x*^))
<^-x*+i ,F (x*) ) , (17)since X* € S andF is monotone. There follows, using (17) in (16):
= ||x -x*f - ||x -
x*f -
x*f - \\>c^ -
*,x*=+i - X * )
- ||x* -x^+i
*,x'^+i -X*)
- ||x* -x'^+'f-F(x*) | | • | c*+> -x^| | (18)

270 p MARCQTTE
since (Proj^(M) - u, Proj^(M) - v) < 0 if v e $ . Using the inequality:
in (18) there comes:
REFERENCES
[1] Abdulaal, M. and LeBlanc, L. J. (1979) "Continuous equilibrium design models". Transportation ResearchB B B p p 19-32.
[2] Auslender, A., (1976) Optimisation. Methodes numeriques, Masson, Paris.[3] Bertsekas, D. P., Hossein, P. A. and Tseng, P. (1987) "Relaxation methods for network flow problems with
convex arc costs", SIAM Journal on Control and Optimization 25,1219-1243.[4] Bertsekas, D.P. and Gafni, E.M. (1982) "Projection methods for variational inequalities with application
to the traffic assignment problem", Mathematical Programming Sttidy 17,139-159.[5] Bertsekas, D. P. and TSeng, P. (1988) "Relaxation methods for minimum cost ordinary and generalized
network flow problems". Operations Research 36, 93-114.[6] Dafermos, S. (1980) "Traffic equilibrium and variational inequalities". Transportation Science 14,42-54.[7] Fukushima, M. (1989) "Equivalent differentiable optimization problems and descent methods for asym-
metric variational inequalities problems". Technical report 89007, Kyoto University.[8] Harker, P.T. (1984) "A variational inequality approach for the determination of oligopolistic market equi-
librium", Maf/iewafica/Programming 30, 105-111.[9] Hearn, D.W., Lawphongpanich, S. and Ventura, J. (1987) "Restricted Simplicial Decomposition: Com-
putations and extensions". Mathematical Programming Study 31,99-118.[10] Khobotov, E.N. (1987) "Modification of the extragradient method for solving variational inequalities and
certain optimization problems", U.S.S.R. Comput. Math. Phys. 27 120-127.[11] Marcotte, P. (1985) "A new algorithm for solving variational inequalities, with application to the traffic
assignment problem". Mathematical Programming 33,339-351.[12] Marcotte, P. (1987) "Algorithms for the network oligopoly problem". Journal of the Operational Research
Society 38,1051-1065.[13] Marcotte, P. and Dussault, J.-P. (1987) "A note on a convergent Newton method for solving monotone
variational inequalities". Operations Research Letters 6, 35-42.[14] Marcotte, P. and Dussault, J.-P. (1989) "A sequential linear programming algorithm for solving monotone
variational inequalities", SLAM Journal on Control and Optimization 27,1260-1278.[15] Marcotte, P. and Guelat, J. (1988) "Adaptation of a modified Newton method for solving the asymmetric
traffic equilibrium problem". Transportation Science 22,112-124.[16] Ng;uyen, S. and Dupuis, C. ( 1984) "An efficient method for computing traffic equilibrium in networks
with asymmetric transportation costs". Transportation Science 18,185-202.[17] Pang, J.S. (1990) "Newton's method for B-differentiable equations". Mathematics of Operations Research,
15,311-341.[18] Pang, J. S. and Chan, D. (1984) "Iterative methods for variational and complementarity problems", Math-
ematical Programming 24, 284-313.[19] Rockafellar, R.T. (1976) "Monotone operators and the proximal point algorithm", SIAM Journal on Con-
trol and Optimization 14,877-898.[20] Spingam, J.E. (1985) "Application of the method of partial inverses to convex programming: decompo-
sition". Mathematical Programming 32,199-223.
a Patrice Marcotte is an associate professor of mathematics at the College militaire
royal de Saint-Jean and an invited researcher at the Center for Research on Transporta-tion (University of Montreal). He graduated with an MSc in mathematics (Montreal),then worked for two years in Operations Research for the Department of National De-
• = , fense in Ottawa, and received a PhD in Operations Research from the University ofMontreal in 1982. He has published 20-odd papers on network design, computation of
,i. ••..,, economic equilibria, variational inequalities, badminton and related topics in journals\ /• such as Mathematical Programming, SIAM Journal on Control and Optimization, SL4M
Review, Networks, RAIRO Recherche Operationnelle, Transportation Science, OperationsResearch Letters. This first one in INFOR is dedicated to Etienne and Nicolas.