-
Christian JUTTEN
Systmes asservis non linaires
Universit Joseph Fourier - Polytech Grenoble
Cours de troisime anne du dpartement 3i
Options Automatique
Aot 2006
1
-
Table des matires
1 Introduction 3
1.1 Limitations des mthodes linaires . . . . . . . . . . . . . .
. 31.2 Systmes non linaires . . . . . . . . . . . . . . . . . . . .
. . 41.3 Non-linarits dans les systmes asservis . . . . . . . . . .
. . 41.4 Systmes asservis possdant un seul lment non linaire . . .
61.5 Exemples de rduction . . . . . . . . . . . . . . . . . . . . .
. 6
1.5.1 Exemple . . . . . . . . . . . . . . . . . . . . . . . . .
. 61.5.2 Exercice . . . . . . . . . . . . . . . . . . . . . . . . .
. 8
1.6 Mthodes dtudes des systmes asservis non linaires . . . .
91.7 Notations . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . 91.8 Rfrences . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 101.9 Plan du document . . . . . . . . . . . . . . . . .
. . . . . . . 10
2 Mthode du premier harmonique 11
2.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 112.2 Condition de validit . . . . . . . . . . . . . . . .
. . . . . . . 122.3 Fonction de transfert gnralise . . . . . . . .
. . . . . . . . 13
2.3.1 Reprsentation graphique . . . . . . . . . . . . . . . .
132.3.2 Elment NL statique ou sans inertie . . . . . . . . . .
13
2.4 Calculs de gains complexes quivalents . . . . . . . . . . .
. . 132.4.1 Principe de calcul . . . . . . . . . . . . . . . . . .
. . . 142.4.2 Gain complexe quivalent de la saturation . . . . . .
. 152.4.3 Gain complexe quivalent dun relais avec hystrsis .
182.4.4 Gain complexe quivalent dun systme NL quelconque 232.4.5
Tableau rcapitulatif de gains complexes quivalents . 24
2.5 Stabilit des systmes asservis non linaires . . . . . . . . .
. 262.5.1 Conditions ncessaires dauto-oscillations . . . . . . . .
262.5.2 Stabilit des auto-oscillations . . . . . . . . . . . . . .
272.5.3 Auto-oscillations dans un asservissement relais . . .
29
1
-
2.5.4 Exemple : dtermination mathmatique des auto-oscillations .
. . . . . . . . . . . . . . . . . . . . . . . 32
2.6 Auto-oscillation dissymtrique . . . . . . . . . . . . . . .
. . . 362.6.1 Gnralits . . . . . . . . . . . . . . . . . . . . . .
. . 362.6.2 Exemple : cas dun relais symtrique avec une entre
x0 + x1 sint . . . . . . . . . . . . . . . . . . . . . . .
372.6.3 Exemple : cas dun relais hystrsis dissymtrique . . 402.6.4
Principe de dtermination des auto-oscillations . . . . 432.6.5
Exemple dun asservissement relais avec perturba-
tion lente . . . . . . . . . . . . . . . . . . . . . . . . .
442.7 Asservissement plusieurs non linarits . . . . . . . . . . . .
48
2.7.1 Systme tudi . . . . . . . . . . . . . . . . . . . . . .
482.7.2 Non linarit quivalente . . . . . . . . . . . . . . . . .
492.7.3 Calcul du gain complexe quivalent . . . . . . . . . . .
502.7.4 Dtermination des auto-oscillations . . . . . . . . . . .
52
2.8 Conclusions sur la mthode du premier harmonique . . . . . .
53
3 Mthode du plan de phase 55
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 553.2 Fondements mathmatiques . . . . . . . . . . . . . . .
. . . . 55
3.2.1 Principe gnral . . . . . . . . . . . . . . . . . . . . .
553.2.2 Points singuliers . . . . . . . . . . . . . . . . . . . . .
563.2.3 Cas dune quation diffrentielle dordre 2 . . . . . . .
573.2.4 Stabilit en un point singulier . . . . . . . . . . . . . .
573.2.5 Rappel sur la rsolution dun systme diffrentiel linaire
583.2.6 Nature des points singuliers . . . . . . . . . . . . . . .
593.2.7 Segments singuliers . . . . . . . . . . . . . . . . . . . .
663.2.8 Cycles limites . . . . . . . . . . . . . . . . . . . . . .
. 70
3.3 Etude dasservissements relais . . . . . . . . . . . . . . .
. . 703.3.1 Solutions dans le plan de phase . . . . . . . . . . . .
. 723.3.2 Etude de la trajectoire . . . . . . . . . . . . . . . . .
. 733.3.3 Reprsentation des trajectoires . . . . . . . . . . . . .
743.3.4 Trajectoire pour = 0 . . . . . . . . . . . . . . . . . .
753.3.5 Calcul du temps le long dune trajectoire . . . . . . . .
753.3.6 Etude pour un relais idal . . . . . . . . . . . . . . . .
773.3.7 Etude pour un relais avec hystrsis . . . . . . . . . .
793.3.8 Relais avec seuil et retard de commutation . . . . . . .
823.3.9 Systme avec correction tachymtrique . . . . . . . . .
84
3.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . .
. . . . 86
2
-
Chapitre 1
Introduction
1.1 Limitations des mthodes linaires
Commenons par rappeler la dfinition dun systme linaire. Au sens
desmathmatiques, un systme est linaire si on peut y appliquer le
principe desuperposition. Dun point de vue physique, la dfinition,
plus restrictive, estla suivante.
Dfinition 1.1.1 Un systme est linaire sil est dcrit par des
quationsdiffrentielles linaires dordre fini coefficients
constants.
Lorsque cette dfinition sapplique, on peut associer au systme,
laidede la transforme de Laplace, une transmittance H(p) qui est
une fractionrationnelle en p = j. En automatique, on complte
frquemment la dfini-tion de linarit avec la transmittance associe
au retard pur, cest--dire unterme de la forme exp(p), o est une
constante de temps.
Les mthodes dtude des systmes linaires sont trs puissantes en
raisondes outils disponibles (algbre linaire, quations
diffrentielles et systmesdiffrentiels linaires, etc.). Malgr tout,
se cantonner aux systmes linairesprsente plusieurs limitations
:
Aucun systme physique nest compltement linaire. Les
mthodeslinaires ne sont donc appliquables que dans un domaine de
fonction-nement restreint.
Certains sytmes sont impossibles modliser, mme localement, des
systmes linaires. Un exemple simple est le relais, que ce soit
soussa forme lectro-magntique ancienne ou sous sa forme
lectronique(transistor en commutation, thyristor, etc.).
3
-
Certains phnomnes ne peuvent pas tre dcrits par des modles
etmthodes linaires. Par exemple,
1. la prcision limite due au seuil alors que la thorie classique
pr-voit une prcision parfaite si le systme comporte un
intgrateurpur,
2. le phnomne de pompage caractris par des oscillations
prio-diques, alors que la thorie linaire ne prvoit que des tats
stablesou instables.
1.2 Systmes non linaires
Par dfinition, un systme non linaire est un systme qui nest pas
li-naire, cest--dire (au sens physique) qui ne peut pas tre dcrit
par desquations diffrentielles linaires coefficients constants.
Cette dfinition, ou plutt cette non-dfinition explique la
complexit etla diversit des systmes non linaires et des mthodes qui
sy appliquent. Ilny a pas une thorie gnrale pour ces systmes, mais
plusieurs mthodesadaptes certaines classes de systmes non
linaires.
On se limitera dans ce cours ltude des systmes asservis non
linaires,cest--dire dasservissements qui contiendront un (voire
plusieurs) lmentsnon linaires. Ces lments devront en outre
appartenir des types biendfinis de non-linarits.
1.3 Non-linarits dans les systmes asservis
La caractristique entre/sortie dun systme prsente frquemment
desdistortions dues aux non-linarits du systmes. Par exemple, un
amplifica-teur prsente une saturation, un pont de redressement
prsente des seuils enraison des seuils des diodes qui le composent
(Fig. 1.1)
Ces cinq non-linarits de base peuvent se combiner pour former
des non-linarits plus complexes, comme le montre la Fig. 1.2.
Ces cinq non-linarits et leurs combinaisons permettent de
reprsenter peu prs tous les types de non-linarits rencontrs dans
les systmes as-servis. Remarquons cependant que ces caractristiques
sont statiques : elles
4
-
se
courbure
s s
e e
saturation seuil
s
e
s
e
hystrsis (jeu) commutateur toutourien
Fig. 1.1 Exemple de non linarits.
s s
e e
s
e
s
e
s
e
courbure avec hystrsis relais avec seuil seuil avec
saturation
relais avec seuil et hystrsis relais avec hystrsis
Fig. 1.2 Combinaisons de non linarits.
5
-
L(p)swe
non linaire
Fig. 1.3 Systme asservi non linaire canonique.
ne modlisent pas les phnomnes dynamiques comme des temps de
com-mutation (relais ou transistor) ou des diffrences de
comportement selon lesfrquences.
On peut classer les non-linairits en plusieurs catgories selon
leurs pro-prits :
des non-linarits continues (courbures) ou discontinues (relais),
des non-linarits avec ou sans mmoire (toutes celles avec hystrsis),
des non-linarits accidentelles, cest--dire dues aux imperfections
descomposants (saturation dun amplificateur, jeu), ou essentielles,
cest--dire lies la nature mme du composant (relais).
1.4 Systmes asservis possdant un seul lment
non linaire
Dans de nombreux cas, un seul lment non linaire, et lon peut
gn-ralement le sparer (hypothse de sparabilit) des autres lments
linairesdu systme. On peut montrer que ltude de tels systmes un
lment nonlinaire sparable peut toujours se ramener ltude dun systme
non li-naire canonique, constitu dans la chane directe dun lment
non linaireisol (bloc avec la double bordure) suivi dun systme
linaire not L(p) (quiregroupe lensemble des termes linaires), et
dun retour unitaire (Fig. 1.3).
1.5 Exemples de rduction
1.5.1 Exemple
Ainsi, il est facile de montrer que le systme de la figure 1.4
se rduit la forme de la figure 1.5. Pour cela, on procde par
dplacement des blocslinaires en prenant garde de conserver le gain
devant llment non linaire.Par exemple, lorsque lon dplace le bloc
H(p), on le met la fois avant le
6
-
+eH(p)
G(p)
F(p)s
Fig. 1.4 Systme asservi non rduit.
+FGH
e1/GHH(p)
s
Fig. 1.5 Systme asservi sous forme canonique.
sommateur et dans la boucle de retour. De cette faon, llment non
linairedevient le premier bloc de la chane directe et, en entre de
ce bloc, le signalprovenant de lentre e comme de la boucle de
retour nest pas modifi.
Attention aux transformations interdites : on ne doit pas
intervertir unbloc linaire avec un bloc non linaire, car la rponse
de llment non linairedpend de lamplitude. Ainsi, le schma de la
figure 1.4 ne peut pas tretransform dans le schma de la figure
1.6.
H(p)F(p)
+e
G(p)
s
Fig. 1.6 Transformation interdite de la figure 1.4.
7
-
F G H
J
K
e s+ +
Fig. 1.7 Systme asservi rduire.
1.5.2 Exercice
Rduire la forme canonique le systme asservi de la figure
1.7.
8
-
1.6 Mthodes dtudes des systmes asservis non
linaires
Dans ce cours, nous proposons deux mthodes dtude des systmes
as-servis non linaires.
La mthode du premier harmonique est une gnralisation de la
mthodeharmonique classique utilise pour les systmes linaires. Le
principe consiste raliser une linarisation dans le domaine
frquentiel afin de gnraliser lanotion de fonction de transfert au
cas NL. Cest une mthode approche quisapplique pour des systmes une
non-linarit sparable et qui supposeque la partie linaire du systme
asservi se comporte comme un filtre passe-bas.
La mthode du plan de phase est un cas particulier (dimension 2)
de lamthode trs gnrale de lespace de phase. Cette mthode est
rigoureuseet permet dtudier des sytmes non linaires quelconques. En
revanche,il est souvent difficile de trouver les solutions de faon
analytique. Lintrtactuel de cette mthode est li la puissance des
calculateurs, qui permettentdintgrer numriquement les quations et
de calculer soit numriquementsoit graphiquement les solutions.
1.7 Notations
Dans ce document, la variable p est utilise comme variable de
Laplace.Autrement dit, p = j o j est le nombre imaginaire pur, tel
que j2 = 1,et reprsente une pulsation.
Le module et largument dun nombre complexe z seront nots |z| et
zrespectivement. Les parties relle et imaginaire seront notes (z)
et (z),respectivement.
On utilisera souvent les abbrviations suivantes : NL pour non
linaire, SA pour systmes asservis.
9
-
1.8 Rfrences
De nombreux ouvrages ont t crits sur les asservissements non
linaires.Quelques rfrences sont disponibles la bibliothque
universitaire, et en par-ticulier une rfrence franaise dont ce
cours sest fortement inspir :
Christian Mira, Systmes asservis non linaires. : aspects
continus et dis-crets, Herms, Paris, 1990
1.9 Plan du document
Outre cette introduction, ce cours est constitu de 2 parties. La
premireest consacre la mthode du premier harmonique, la seconde la
mthodedu plan de phase.
10
-
Chapitre 2
Mthode du premier
harmonique
2.1 Principe
Lide consiste gnraliser la mthode de lanalyse harmonique
utilisepour ltude de systmes linaires.
Pour un systme linaire, une excitation sinusodale de pulsation
:x(t) = x1 sin(t) est associe une rponse sinusodale de mme
pulsation :s(t) = s1 sin(t+ ).
En notation complexe, on peut crire x(t) = x0 exp(jt) et s(t)
=s1 exp[j(t+)]. En notant p = j, la fonction de tranfert H(p) du
systmelinaire est alors gale au rapport complexe :
H(p) =s(t)
x(t)=
s1x1
exp(j), (2.1)
que lon peut caractriser par le module :
|H(p)| = s(t)x(t)
= s1x1, (2.2)
et la phase :
H(p) = arg( s1x1
exp(j))= . (2.3)
Pour un systme NL, une excitation sinusodale de pulsation : x(t)
=x1 sin(t) est associe une rponse priodique de priode T = 2/,
mais
11
-
non sinusodale. La rponse s(t) tant priodique, on peut la
dvelopper ensries de Fourier. En supposant que la moyenne s0 de
s(t) est nulle, on a :
s(t) = s1 sin(t+ 1) + s2 sin(2t+ 2) + . . .+ sk sin(kt+ k) + . .
. (2.4)
Lapproximation du premier harmonique consiste conserver
uniquementle premier terme en :
s(t) s1 sin(t+ 1), (2.5)les autres termes, en 2, 3, etc. tant
supposs filtrs par le reste du sys-tme.
Par analogie au cas linaire, on peut introduire une fonction de
trans-fert gnralise ou quivalente, note N(x1, ), qui dpend en
particulier delamplitude du signal dentre. Le gain complexe
quivalent scrit alors :
N(x1, ) =s1 exp[j(t+ 1)]
x1 exp(jt), (2.6)
et il est caractris par son module :
|N(x1, )| = s1x1, (2.7)
et sa phase :N(x1, ) = 1. (2.8)
Cette approche prsente deux diffrences essentielles par rapport
lafonction de fransfert utilise pour les systmes linaires :
il sagit dune approximation dont il faudra vrifier le bien-fond,
le gain complexe quivalent dpend de la pulsation et aussi de
lampli-tude x1 de lexcitation.
2.2 Condition de validit
Il faut vrifier deux conditions pour pouvoir appliquer la mthode
dupremier harmonique un systme asservi non linaire :
1. Condition de sparabilit : le SA possde un seul bloc NL quil
estpossible disoler. Les autres lments sont supposs linaires, au
moinsapproximativement.
2. Condition de filtrage : la partie linaire du SA, note
globalement L(p),est un filtre passe-bas qui filtre les termes en 2
3, etc. ce qui rendacceptable lapproximation au premier harmonique
(2.5) dans le calculdu dveloppement en sries de Fourier.
12
-
Cette dernire condition est qualitative, mais de sa pertinence
dpend laqualit de lapproximation.
2.3 Fonction de transfert gnralise
2.3.1 Reprsentation graphique
On considre la fonction de transfert gnralise N(x1, ) associe
unlement NL. N(x1, ) peut tre reprsente graphiquement par une
famillede lieux de tranfert gradus selon , chacun des lieux tant
associ unevaleur de x1. Gnralement, puisque N(x1, ) est complexe,
on la reprsentedans le plan de Nyquist ((N),(N)) ou dans le plan de
Black (N, |N |dB).
2.3.2 Elment NL statique ou sans inertie
Le trac et lutilisation de la fonction de transfert gnralise est
complexedans le cas gnral, car celle-ci est une fonction de 2
variables. On peutsouvent considrer que llment NL est statique (on
dit aussi sans inertie)ne dpend pas de la pulsation . On peut alors
crire :
N(x1, ) = N(x1). (2.9)
Cette simplification est possible pour les non-linarits prsentes
danslIntroduction. La fonction de transfert gnralise est alors
appele fonctiondamplitude ou gain complexe quivalent. Ce gain
complexe quivalentN(x1)se reprsente par un lieu unique (et non plus
une famille), gradu en x1, maison considre plutt le lieu critique
C(x1) = 1/N(x1), pour des raisons quideviendront videntes lorsque
nous aborderons les problmes de stabilit.
2.4 Calculs de gains complexes quivalents
On se propose de calculer les gains complexes quivalents de
quelquesnon-linarits usuelles. La mthode gnrale de calcul est le
dveloppementen sries de Fourier. On supposera que la non-linarit
est statique et sy-mtrique (mais pas forcment impaire) par rapport
0. On suppose que lanon-linarit est excite par un signal de priode
T = 1/f = 2/ de laforme : x(t) = x1 sin(t).
13
-
2.4.1 Principe de calcul
Les coefficients de Fourier seront nots an pour les termes en
cosinusdharmonique n, et bn pour les termes en sinus dharmonique n.
En pra-tique, on se limitera bien entendu au calcul des termes
dharmonique 1.
Proprits La symtrie de la non-linarit par rapport 0 implique
quela moyenne est gale 0 :
a0 =1
T
T0
s(t)dt = 0 (2.10)
Dune faon gnrale, si la non-linarit est impaire, le dveloppement
ensries de Fourier ne comporte pas de termes pairs, cest--dire de
termes encosinus : an = 0, n.
Si la non-linarit est sans mmoire et symtrique, elle est impaire
et parconsquent an = 0, n.
Dfinition des coefficients Les coefficients des termes a1 et b1
sont d-finis par :
a1 =2
T
T0
s(t) cos(t)dt (2.11)
et :
b1 =2
T
T0
s(t) sin(t)dt. (2.12)
En rponse x(t) = x1 sin(t), on obtient une rponse s(t) dont
lap-proximation du premier harmonique vaut :
s(t) s1(x1) sin[t+ (x1)], (2.13)dans laquelle on a crit s1(x1)
et (x1) pour insister sur le fait que lam-plitude et la phase du
premier harmonique dpendent de lamplitude x1 delexcitation x(t).
Dans la suite, pour allger les notations, on notera simple-ment s1
et 1, et on remplacera par =. En dveloppant (2.13), on a :
s(t) = s1
(sin(t) cos1 + cos(t) sin1
)= (s1 sin1) cos(t) + (s1 cos1) sin(t). (2.14)
On a finalement : {a1 = s1 sin1b1 = s1 cos1
(2.15)
14
-
xs
x M- x M
- k x M
k x M
Fig. 2.1 Saturation. Pour |e| xM , la rponse est s = ke, avec k
R+.
Gain complexe quivalent En notation complexe, on a{s(t) = s1
exp[j(t+ 1)]x(t) = x1 exp(jt)
(2.16)
do le gain complexe quivalement :
N(x1) =s(t)
x(t)=
s1x1
exp(j1) =s1x1
(cos1 + j sin1). (2.17)
En utilisant le rsultat (2.15), on a la formule :
N(x1) =b1x1
+ ja1x1. (2.18)
2.4.2 Gain complexe quivalent de la saturation
On dsire calculer le gain complexe quivalent de la saturation
(Fig. 2.1).On fera le calcul pour k = 1.
On applique lentre une excitation sinusodale x(t) = x1 sin(t).
Tantque |x(t)| xM , la sortie est gale lentre, cest--dire s(t) =
x(t). Pour|x(t)| > xM , la saturation agit et on a s(t) = xM
(Fig. 2.1)
Calcul
La saturation est une fonction impaire. On a donc a0 = a1 = 0.
Il suffitde calculer le coefficient b1 du terme en sin(t) :
b1 =2
T
T0
x(t) sin(t)dt. (2.19)
15
-
Mx
tT / 21t
Fig. 2.2 Rponse de la saturation une excitation sinusodale.
En raison des symtries, lintgrale peut tre calcule dans
lintervalle [0, /4] :
b1 =8T
T/40 x(t) sin(t)dt
= 8T
[ t10 x1 sin
2(t)dt+ T/4t1
xM sin(t)dt] (2.20)
o t1 est tel que x1 sint1 = xM . En crivant sin2 u = (1 cos
2u)/2 et en
intgrant, on a :
b1 =8T
[ t10 x1
(1cos 2t)2 dt+
xM cost|
T/4t1
]= 4x1T (t1 sint1 cost1 ) + 8xMT cost1,
(2.21)
car T/4 = 2/4 = /2. En utilisant la dfinition de t1, on dduit
sint1 =xM/x1 et t1 = arcsin(xM/x1)/. De lidentit cos
2 u + sin2 u = 1, on tirecost1 =
1 (xM/x1)2. Or langle t1 ]0, /2[, on dduit que cost1 >
0 et on choisit la dtermination positive : cost1 = +
1 (xM/x1)2. Ainsi,le coefficient b1 devient :
b1 =2x1
[arcsin (
xMx1
) +xMx1
1
(xMx1
)2]. (2.22)
Finalement, le gain complexe quivalent est gal :
N(x1) =b1x1
=2
[arcsin
(xMx1
)+xMx1
1 (xM
x1)2], (2.23)
pour x1 > xM (sinon le systme est linaire et N(x1) = 1).
16
-
1x
)( 1xN
Fig. 2.3 Gain complexe quivalent de la saturation (xM = 2).
Trac du gain complexe quivalent
Il est facile de voir que le gain complexe vaut 1 pour x1 xM .
En drivantN par rapport x1, on trouve :
dN
dx1= 4
xMx21
1
(xMx1
)2. (2.24)
On voit que la drive est ngative, par consquent le gain complexe
qui-valent est une fonction dcroissante. On calcule ensuite la
limite pour x1 xM :
limx1xM
N(x1) = 1, (2.25)
et pour x1 :lim
x1N(x1) = 0. (2.26)
Il est aussi facile de calculer le comportement asymptotique
deN(x1), lorsquex1/xM 1 :
N(x1) 4
xMx1
, (2.27)
est une hyperbole.
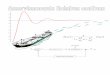
Finalement, le trac est donn la figure 2.3 pour xM = 2.
Lieu critique
En pratique, ltude de lexistence dauto-oscillations et de la
stabilitsappuie sur le lieu critique C(x1) = 1/N(x1) plutt que sur
le gain com-plexe quivalent. Le gain complexe quivalent tant une
fonction dcroissante
17
-
1x ) )(( 1xC) )(( 1xCc r o i s s a n t
Fig. 2.4 Lieu critique C(x1) de la saturation.
x
w+ M
- M
- h / 2 + h / 2
Fig. 2.5 Relais sans seuil et avec hystrsis.
vrifiant 0 < N(x1) 1, le lieu critique est une fonction
galement dcrois-sante comprise dans lintervalle ],1]. La valeur
C(x1) = 1 est obtenuepour N(x1) = 1, et C(x1) lorsque x1 +. On
trace usuellementle lieu critique dans un plan complexe (plan de
Black ou Nyquist). La figure2.4 donne le trac de C(x1) dans le plan
de Nyquist.
2.4.3 Gain complexe quivalent dun relais avec hystrsis
On dsire calculer le gain complexe quivalent du relais sans
seuil et avechystrsis dont la caractristique est donne la figure
2.5.
On applique lentre une excitation sinusodale x(t) = x1 sin(t).
Onsuppose que lon part avec w(t) = M . Tant que x(t) h/2, la
sortiedu relais ne change pas. La commutation, M +M , se produit
pourx(t) = h/2. Ensuite, tant que x(t) > h/2, la sortie de
relais reste +M .La commutation, M M , se produit x(t) = h/2. Le
relais reste danscette position tant que lentre natteint pas +h/2
(Fig. 2.6).
Calcul
En raison de lhystrsis, la sortie w(t) est dphase sur lentre
x(t), cequi implique que les coefficients a1 et b1 sont non
nuls.
Calculons dabord a1, qui vaut par dfinition :
18
-
x ( t )
w ( t )
t
Mh / 2
- h / 2
t 1
Fig. 2.6 Rponse w(t) du relais hystrsis une excitation
sinusodalex(t).
a1 =2
T
T0
w(t) cost dt,
=4
T
T/20
w(t) cost dt, (2.28)
car les deux fonctions w(t) et cost tant opposes sur les
intervalles [0, T/2]et [T/2, T ], lintgrale totale est gale deux
fois lintgrale sur le premier in-tervalle. Soit t1 la date de la
commutation M +M , on peut dcomposerlintgrale :
a1 =4
T
[ t10
w(t) cost dt+
T/2t1
w(t) cost dt],
=4
T
[ t10
(M) cost dt+ T/2t1
M cost dt],
=4
T
[ M
sint1 +
M
(sin(T/2) sint1)
],
= 8MT
sint1,
car sinT/2 = sin = 0.Au temps t1, on a x(t1) = x1 sint1 = h/2,
cest--dire sint1 =
h/(2x1) ; de plus, T = 2, puisque T est la priode associe la
pulsa-tion . Finalement, on a :
a1 = 2Mhx1
. (2.29)
19
-
Calculons maintenant b1 :
b1 =2
T
T0
w(t) sint dt,
=4
T
T/20
w(t) sint dt, (2.30)
car les deux fonctions w(t) et sint tant opposes sur les
intervalles [0, T/2]et [T/2, T ], lintgrale totale est gale deux
fois lintgrale sur le premierintervalle. En notant toujours t1 la
date de la commutation M +M , onpeut crire :
b1 =4
T
[ t10
w(t) sint dt+
T/2t1
w(t) sint dt],
=4
T
[ t10
(M) sint dt+ T/2t1
M sint dt],
=4
T
[+M
(cost1 1) + M
( cos(T/2) + cost1)
],
=8M
Tcost1,
car cosT/2 = cos = 1.Il reste calculer cost1. Au temps t1, on a
vu que sint1 = h/(2x1).
Par consquent, cos2 t1 = 1 sin2 t1, ce qui conduit aux deux
solutions :
cost1 =
1( h2x1
)2. (2.31)
En ralit, puisque 0 < t1 < /2, cost1 > 0, et on ne
conserve que lasolution positive, do finalement :
b1 =4M
1
( h2x1
)2. (2.32)
Trac du gain complexe quivalent
Le gain complexe quivalent scrit alors :
N(x1) =b1 + ja1
x1
=4M
x1
1
( h2x1
)2 j 2Mh
x21,
20
-
R eI m
+ 1x
2/1 hx 0
- 1
x 1 c r o i s s a n t
0 , 5
Fig. 2.7 Gain complexe quivalent du relais hystrsis dans le plan
deNyquist.
=4M
x1
[1
( h2x1
)2 j h
2x1
]. (2.33)
On remarque facilement que le terme entre crochet est un nombre
com-plexe de module unit. On en dduit facilement le module et
largument dugain complexe quivalement :
|N(x1)| = 4Mx1
, (2.34)
N(x1) = arcsin( h2x1
). (2.35)
Remarquons que largument pourrait aussi tre exprim partir de
larc-tangente, mais cela donnerait une expression plus complexe. On
remarqueque largument prvoit un dphasage retard, ce qui se comprend
intuitive-ment sur la figure 2.6 o la sortie du relais, w(t), est
retarde (de (t1)) parrapport lentre x(t).
Lieu critique
Par dfinition, le lieu critique sexprime C(x1) = 1/N(x1). La
forme ex-ponentielle complexe de N(x1) est ici particulirement
intressante utiliseret conduit :
21
-
d BxC )( 1
e n )( A r g 1xCFig. 2.8 Lieu critique du relais hystrsis dans
le plan de Black.
|C(x1)| = x14M
, (2.36)
C(x1) = + arcsin( h2x1
). (2.37)
Lexpression complexe est aussi trs simple. A partir de (2.36),
on dduit :
C(x1) = x14M
[1
( h2x1
)2+ j
h
2x1,]
= x14M
1
( h2x1
)2 j h
8M. (2.38)
Le trac du lieu critique est trs simple dans le plan de Black
(moduleen dB en fonction de la phase) comme dans le plan de
Nyquist. Dans le plande Nyquist, on remarque notamment que la
partie imaginaire est constante,gale h/8M , et que la partie relle,
toujours ngative, tend vers lorsque x1 crot. Les tracs dans les
deux reprsentations sont donnes auxfigures 2.8 et 2.9.
22
-
R e
I m
Mh8p
-
+ 1x2/1 hx
Fig. 2.9 Lieu critique du relais hystrsis dans le plan de
Nyquist.
2.4.4 Gain complexe quivalent dun systme NL quelconque
Le gain complexe quivalent consiste calculer lapproximation du
pre-mier harmonique. La mthode gnrale consiste calculer le
dveloppementen srie de Fourier. Parfois, il est possible de
calculer le terme du premier har-monique par un calcul
trigonomtrique direct. Cest souvent le cas lorsque lanonlinarit est
continue et sexprime sous la forme dune expression simple,notamment
polynomiale.
Exercice : NL dfinie par une expression
On considre la nonlinarit telle que w(x) = kx(1 + x2). Montrer
quele gain complexe quivalement est gal N(x1) = k(1 +
34x
21). On tracera
le gain complexe et le lieu critique en discutant selon les
valeurs de .
23
-
xs
x M- x M
- k x M
k x M
+ M
- M
x
w
+ D / 2- D / 2
x
s
D / 2- D / 2
p e n t e k
x
s
D / 2- D / 2
p e n t e k
x M- x M
k ( x M - D / 2 )
x
s
h / 2- h / 2
p e n t e k
S a t u r a t i o n S e u i l S e u i l e t s a t u r a t i o
n
H y s t r s i s
x
s
P l u s o u m o i n s
M
- MP l u s o u m o i n sa v e c s e u i l
x
s
P l u s o u m o i n sa v e c h y s t r s i s
M
- M
- h / 2 h / 2x
s
P l u s o u m o i n sa v e c s e u i l e t h y s t r s i s
M
- M
22h
-
D
22h
+
D
x
s
p e n t e k 1
N o n l i n a i r ep a r m o r c e a u x
p e n t e k 2
x M
k 1 x M
Fig. 2.10 Non-linarits usuelles dont les gains complexes
quivalents sontdonns dans le tableau rcapitulatif.
2.4.5 Tableau rcapitulatif de gains complexes quivalents
Pour viter les calculs, on pourra utiliser la table ci-dessous,
dont lesnotations sont les suivantes :
le gain complexe quivalent scrit N(x1) = NP (x1)+ jNQ(x1), o
NPet NQ sont les composantes en phase et en quadrature,
x1 est lamplitude de lentre de la forme x(t) = x1 sin(t) la
fonction f dsigne la fonction saturation dfinie par :
f(u) =
1 , pour u 12pi
[arcsinu+ u
1 u2
], pour |u| < 1
+1 , pour u 1(2.39)
Le tableau ci-dessous donne les gains complexes correspondant
aux ca-ractristiques de la figure 2.10.
24
-
Non-linarit Gain complexe quivalent
NP = kf(xMx1
)Saturation
NQ = 0
NP = k[1 f
(2x1
)]Seuil
Nq = 0
NP = k[1 f
(xMx1
) f
(2x1
)]Seuil et saturation
NQ = 0
NP =k2
[1 + f
(1 hx1
)]Hystrsis
NQ = 2khpix1(1 h2x1
)NP =
4Mpix1
Plus ou moins
NQ = 0
Plus ou moins NP =4Mpix1
1
(2x1
)2avec seuil
NQ = 0
Plus ou moins NP =4Mpix1
1
(h2x1
)2avec
hystrsis NQ = 2Mhpix21
Plus ou moins NP =2Mpix1
[1
(+h2x1
)2+
1
(h2x1
)2]avec
seuil et hystrsis NQ = 2Mhpix21
Non linaire NP = (k1 k2)f(xMx1
)+ k2
par
morceaux NQ = 0
Tab. 2.1 Tableau rcapitulatif des gains complexes quivalents de
non-linarits usuelles
25
-
2.5 Stabilit des systmes asservis non linaires
2.5.1 Conditions ncessaires dauto-oscillations
Dans le cas dun systme asservi possdant un seul lment non
linaire,sparable, sans inertie et filtr, on peut se ramener au
modle canonique(Fig. 1.3).
Dans ce modle, llment non linaire est remplac par son gain
complexequivalent N(x1). En boucle ferme, la fonction de transfert
gnralise peutscrire :
S
E=
N(x1)L(j)
1 +N(x1)L(j). (2.40)
Quelle que soit lentre e, la stabilit du systme dpend de la
valeurdu dnominateur. On obtient la condition ncessaire
dauto-oscillation enannulant le dnominateur de la fonction de
tranfert (2.40) :
1 +N(x1)L(j) = 0. (2.41)
Chaque solution mathmatique de cette quation donne la pulsation
0et lamplitude (x1)0 dune auto-oscillation. On peut encore crire
:
L(j) = 1N(x1)
= C(x1). (2.42)
Cette dernire relation, facile rsoudre graphiquement, montre que
cessolutions sont les intersections entre les courbes
reprsentatives de la partielinaire L(j) et du lieu critique C(x1).
Le lieu critique C(x1) est de faonvidente une gnralisation de la
notion de point critique, telle quelle estprsente dans ltude des
systmes linaires.
Si les deux courbes, L(j) et C(x1), se coupent en un pointM(0,
(x1)0)(voir Figure 2.11), la condition ncessaire dauto-oscillation
est vrifie aupoint dintersection : il existe peut-tre une
auto-oscillation de pulsation 0et damplitude (x1)0.
Pourquoi peut-tre ?
Parce que cette auto-oscillation, pour tre observable
physiquement, nedoit pas tre fugitive. Cest--dire que si on modifie
un peu lamplitude et/oula pulsation de lauto-oscillation, on doit
revenir vers les solutions, 0 et(x1)0. On dit alors que
lauto-oscillation est stable.
26
-
R eI m
0
x 1 c r o i s s a n t
L ( j w )
w c r o i s s a n t
C ( x 1 )
Fig. 2.11 Une auto-oscillation est dtermine par la solution de
lqua-tion L(j) = C(x1), qui correspond graphiquement lintersection
des deuxcourbes L(j) et C(x1).
2.5.2 Stabilit des auto-oscillations
On se place en un point dintersection, ((x1)0, 0), des deux
courbesL(j) et C(x1). Sous lhypothse du premier harmonique,
lauto-oscillationse rduit une oscillation sinusodale pure
dexpression complexe x(t) =(x1)0 exp(j0t). Supposons qu linstant t
= 0, on perturbe lauto-oscillationpar une petite variation de
pulsation, , et par une petite variation dam-plitude, x1. Pour t
> 0, on peut alors crire :
x(t) = ((x1)0 +x1) exp (j(0 +)t) exp(t), (2.43)o est un terme
damortissement. Si > 0, lamplitude dcrot lorsque tcrot ;
rciproquement, si < 0, lamplitude crot lorsque t crot. Par
cons-quent, lauto-oscillation sera stable si lorsque t crot, x(t)
revient vers lauto-oscillation initiale. Pour cela, dans (2.43), la
perturbation damplitude, x1,et lamortissement, , doivent donc tre
de mme signe.
Condition mathmatique gnrale
Puisque la fonction de transfert et le gain complexe quivalent
sont desfonctions complexes, la condition de stabilit, L(j)N(x1) +
1 = 0 peutscrire :
X(, x1) + jY (, x1) = 0, (2.44)
o X(, x1) et Y (, x1) sont deux fonctions relles de deux
variables relles.Finalement, la condition dauto-oscillation devient
:{
X(, x1) = 0,Y (, x1) = 0.
(2.45)
27
-
Au voisinage du point ((x1)0, 0), on peut crire que la condition
de stabilitreste satisfaite, cest--dire :
X(0++ j, (x1)0+x1)+ jY (0++ j, (x1)0+x1) = 0. (2.46)
En dveloppant au premier ordre au voisinage du point, et en
tenantcompte du fait que X(0, (x1)0) = 0 et Y (0, (x1)0) = 0, on
arrive auxquations :
X
( + j) +
X
x1x1 + j
Y
( + j) + j
Y
x1x1 = 0. (2.47)
En regroupant entre eux les termes rels et imaginaires, on
arrive finale-ment au systme : {
X +
Xx1
x1 Y = 0Y +
Yx1
x1 +X = 0
(2.48)
En multipliant la premire quation par Y/ et la seconde
parX/,puis en sommant les deux quations, on limine et il reste
:(X
x1
Y
X
Y
x1
)x1 =
[(X
)2+(Y
)2]. (2.49)
De faon vidente, le terme de droite entre crochets est positif.
Pour quela condition de stabilit soit satisfaite, puisque x1 et
doivent tre demme signe, on doit donc satisfaire la condition :
X
x1
Y
X
Y
x1> 0. (2.50)
Condition pratique dans le plan de Nyquist
Nous avons vu que la dtermination des auto-oscilations peut se
fairetrs simplement de faon graphique. Nous proposons ici de
chercher unecondition pratique de stabilit. Nous nous plaons dans
le plan de Nyquistet nous posons : {
L(j) = U() + jV ()C(x1) = P (x1) + jQ(x1).
(2.51)
Avec ces notations, la condition dauto-oscillation, L(j) =
C(x1), scrit
U() P (x1) + j[V ()Q(x1)
]= 0. (2.52)
28
-
En identifiant avec lquation (2.44), on a :{X(, x1) = U() P
(x1)Y (, x1) = V ()Q(x1). (2.53)
On peut maintenant calculer des drives partielles qui
interviennent dansla condition de stabilit (2.50) qui devient alors
:
Q
x1
U
V
P
x1> 0. (2.54)
En pratique, on reprsente les points (U, V ) et (P,Q) du plan
complexecomme des vecteurs (U, V, 0)T et (P,Q, 0)T dun espace trois
dimensions.Les tangentes aux courbes L(j) et C(x1) sont
respectivement colinairesaus vecteurs :
tL =
UV0
et tC = x1
PQ0
. (2.55)La condition de stabilit (2.54) peut alors tre vue comme
la condition
vectorielle sur les vecteurs tangentes :
tL tC > 0, (2.56)
cest--dire que les vecteurs tangente (tL,
tC) sont dans le sens direct.
Condition pratique dans le plan de Black
On ne fera pas les calculs dans le plan de Black. De faon
similaire, onpourrait montrer que, dans le plan de Black, la
condition est loppose celledu plan de Nyquist, cest--dire que les
vecteurs tangente (
tL,
tC) sont dans
le sens rtrograde.
2.5.3 Auto-oscillations dans un asservissement relais
Si llment non linaire est un asservissement relais avec seuil et
hyst-rsis, il peux exister plusieurs intersections entre la courbe
reprsentative dulieu critique et celle de L(j). Cest le cas de la
figure 2.12, o il existe deuxpoints dintersection M et M . En
appliquant le critre de stabilit des auto-oscillations du
paragraphe prcdent, on vrifie que le point M correspond une
auto-oscillation stable, tandis que le point M est associ une
auto-oscillation instable. Ceci signifie que lauto-oscillation
associe M nest
29
-
R eI m
0x 1 c r o i s s a n t
L ( j w )
w c r o i s s a n t C ( x 1 )
M
M 'A
Fig. 2.12 Lexistence de deux intersections est possible selon la
forme dela courbe C(x1). Dans ce cas, lune des intersections (M)
correspond uneauto-oscillation stable, lautre (M ) une
instable.
pas observable : en effet, sil existe une petite perturbation
(amplitude oupulsation), on ne revient pas au point M , mais vers
le point A (disparitionde lauto-oscillation) ou vers le point M
(lauto-oscillation stable).
Si maintenant, le gain k de la partie linaire L(j) = kL(j) (k
R)varie, les points dintersection se dplacent et peuvent disparatre
(ou appa-ratre). A la figure 2.13, si k augmente, lintersectionM
glisse vers la gaucheet peut disparatre. Il ny a plus quune
auto-oscillation stable. Au contraire,si le gain k diminue, les
deux points M et M se rapprochent, finissent partre confondus puis
par disparatre pour k < kC , o kC est un gain critique.Selon les
variations du gain, on observe que le comportement du systmepeut
changer considrablement : ainsi kC correspond une frontire
dangeu-reuse de stabilit car on passe brutalement de labsence
dauto-oscillation une auto-oscillation stable.
Pour dautres types de nonlinarits (Figure 2.14), il nexiste
quune in-tersection associe une auto-oscillation stable et la
variation du gain modifiecontinuement les paramtres (amplitude et
pulsation) de lauto-oscillation.Lorsque k < kc il ny a pas
dauto-oscillation, lorsque k > kc lauto-oscillationapparat et
ses paramtres varient progressivement lorsque k augmente : onparle
alors de frontire non dangereuse de stabilit.
30
-
R eI m
0x 1 c r o i s s a n t
L * ( j w )
w c r o i s s a n t C ( x 1 )
M
M 'A
k L * ( j w )( k < 1 )
k L * ( j w )( k > 1 )
Fig. 2.13 Existence de deux auto-oscillations. Lorsque le gain k
varie, lesauto-oscillations peuvent disparatre ou apparatre, et
parfois brutalement.
R eI m
0
x 1 c r o i s s a n t
L * ( j w )
w c r o i s s a n tC ( x 1 )M
Ak L * ( j w )( k < 1 )
k L * ( j w )( k > 1 )
Fig. 2.14 Existence dune auto-oscillation. Lorsque le gain k
varie, lauto-oscillation peut disparatre ou apparatre, mais ses
paramtres varient pro-gressivement.
31
-
pTk11
1 + )1( 22pTp
k+
+ ++ + R e l a i s i d a l
k
- -
ee sr x w
Fig. 2.15 Asservissement non linaire. Le relais est idal : il
commute auxpassages 0 vers les valeurs M .
x
w
- M
+ M
Fig. 2.16 La non linarit est un relais idal.
2.5.4 Exemple : dtermination mathmatique des auto-
oscillations
On considre lasservissement de la figure 2.15, dans lequel
llment nonlinaire isol est un relais idal dont la caractristique
est donne la figure2.16. On veut dterminer sil existe des
auto-oscillations et si oui, quellessont leurs caractristiques.
Avant tout calcul, il faut justifier lutilisation de la mthode
du premierharmonique : il ny a quun seul lment non linaire, spar,
la condition defiltrage est a priori satisfaite par les blocs
linaires passe-bas. Ceci tant, onpeut procder calculer les
auto-oscillations :
graphiquement, aprs avoir mis lasservissement sous forme
canonique(Fig. 2.17), calcul le gain complexe quivalent du relais
et tudi lesintersections des courbes reprsentatives C(x1) et
L(j).
analytiquement, en calculant les solutions mathmatiques de
lquationL(j) = C(x1) et en tudiant leur stabilit.
32
-
+
++
kpTk
pTpk
11
22
1)1(++ R e l a i s i d a l
-
e sx wpTk11
1 + kpTk
+
+ 11
1
Fig. 2.17 Forme canonique de lasservissement non linaire de la
figure2.15.
Dtermination analytique des solutions partir de la forme
cano-
nique
La forme canonique montre clairement que les conditions
dapplicationde la mthode du premier harmonique sont satisfaites
:
llment non linaire est sparable, la partie linaire se comporte
globalement comme un filtre passe-basdordre deux : la condition de
filtrage est vrifie.
A partir de la reprsentation canonique, on crit la condition
dauto-oscillationL(j)N(x1) + 1 = 0. Lexpression L(j) apparat
directement sur la figure2.17 ; lexpression de N(x1) se calcule
aisment par dveloppement en s-ries de Fourier (en observant, compte
tenu de la forme impaire de la ca-ractristique, que le terme a1 =
0. Aprs un calcul simple
1, on arrive N(x1) = 4M/x1.
La condition dauto-oscillation scrit donc :
4M
x1
k2p(1 + T2p)
( k11 + T1p
+ k)+ 1 = 0. (2.57)
Aprs un calcul algbrique simple, on peut mettre cette expression
sousla forme dune quation polynomiale en p :
T1T2p3 + (T1 + T2)p
2 +(1 + kk2T1
4M
x1
)p+ k2(k1 + k)
4M
x1= 0. (2.58)
En posant p = j, on peut crire cette quation sous la forme :
jT1T23 (T2 + T1)2 + j(1 + 4Mx1
k2kT1) +4M
x1k2(k1 + k) = 0. (2.59)
1on pourrait aussi trouver ce rsultat en faisant h/2 = 0 dans la
relation (2.38)
33
-
En rassemblant les termes rels et imaginaires, on arrive la
forme tho-rique X(, x1) + jY (, x1) = 0 :[4Mx1
k2(k1+k) (T2+T1)2]+ j[(1+
4M
x1k2kT1)T1T23
]= 0. (2.60)
On doit donc rsoudre le systme :{X(, x1) =
4Mpix1
k2(k1 + k) (T2 + T1)2 = 0Y (, x1) = (1 +
4Mpix1
k2kT1) T1T23 = 0 (2.61)
dont les solutions sont les couples (, x1) associs aux
auto-oscillations. Onpeut liminer en multipliant la premire quation
par T1T2 et la secondepar (T1 + T2)/, puis en sommant les deux, ce
qui donne :
4Mx1
k2(k1 + k)T1T2 + (1 +4M
x1k2kT1)(T1 + T2) = 0,
4Mx1
k2k1T1T2 + (T1 + T2) +4M
x1k2kT
21 = 0,
4Mx1
k2T1(k1T2 kT1) + (T1 + T2) = 0.
On trouve alors :
(x1)0 =4M
k2T1(k1T2 kT1)T1 + T2
. (2.62)
En reportant la solution en x1 dans la premire quation2 de
(2.61), on
trouve la solution en :
4M
[ 4M
T1 + T2k2T1(k1T2 kT1)
]k2(k1 + k) (T2 + T1)2 = 0, (2.63)
cest--dire, aprs simplification :
0 =
k1 + k
T1(k1T2 kT1) . (2.64)
Ces solutions mathmatiques ont un sens si les deux quantits x1
et sont positives, cest--dire si 0 < k < k1T1/T2.
2on choisit la plus simple
34
-
Dtermination analytique directe des solutions
On peut aussi procder analytiquement sans mettre lasservissement
sousforme canonique. Les quations du systme sont :
r = k1s1+T1px = r ksw = (x)
s = k2wp(1+T2p) .
(2.65)
La troisime quation de (2.65) peut donc scrire :
w =4M
x1x. (2.66)
En calculant w en fonction de x laide des autres quations de
(2.65),on trouve successivement :{
w = sp(1+T2p)k2x =
(k1s
1+T1p ks
).
(2.67)
Puis en combinant les deux quations de (2.67), on arrive :
w =4M
x1x = p(1 + T2p)
k2
1 + T1p
k1 + k + kT1px. (2.68)
Enfin, en simplifiant par x, on a :
4M
x1
k2(k1 + k + kT1p)
p(1 + T1p)(1 + T2p)= 1, (2.69)
qui est de la forme N(x1)L(j) = 1 (avec p = j) et identique
lquation(2.57) trouve prcdemment.
Stabilit de lauto-oscillation
De plus, il faut vrifier que la solution mathmatique trouve au
para-graphe prcdent a une ralit physique, cest--dire dire quelle
est obser-vable ou stable au sens o nous lavons dfini prcdemment.
Pour cela, onva vrifier si la condition de stabilit (2.50) de
lauto-oscillation est satisfaite.Calculons dabord les drives
partielles des parties relles et imaginaires de(2.61) par rapport
x1 et :
X(,x1)x1
= 4Mpix2
1
k2(k1 + k) ;X(,x1)
= 2(T1 + T2)Y (,x1)
x1= 4M
pix21
k2kT1 ;Y (,x1)
= 1 +4Mpix1
k2kT1 3T1T22(2.70)
35
-
On calcule maintenant la condition CO :
CO(, x1) = X(,x1)x1Y (,x1)
X(,x1) Y (,x1)x1= 4M
pix21
k2(k1 + k)[1 + 4Mpix1k2kT1 32T1T2
]22(T1 + T2) 4Mpix1k2kT1
= k2 4Mpix21
[2T1(2kT1 3k1T2 kT2) + (k1 + k)
+ 4Mpix1k2kT1(k1 + k)].
(2.71)
Puisque lon tudie la condition au point solution de la condition
dauto-oscillation, dans la dernire quation on remplace x1 et par
les valeurstrouves (2.62) et (2.64) :
CO(0, (x1)0) = k2 4Mpix21
[k1+k
T1(T2k1T1k)T1(2kT1 3k1T2 kT2)
+(k1 + k) +T1+T2
k2T1(T2k1T1k)k2kT1(k1 + k)
]= k2 4Mpix2
1
[(k1 + k)
(2(kT1k1T2)T2(k1+k))(T2k1T1k)
+(k1 + k) +k(k2+k)(T1+T2)
(T2k1T1k)
]= k2 4Mpix2
1
[ (k1 + k) T2(k1+k)
2
(T2k1T1k)+ k(k1+k)(T1+T2)(T2k1T1k)
]= 4Mk2(k1+k)
pix21(T2k1T1k)
[ (T2k1 T1k)
T2(k1 + k) + k(T1 + T2)]
= 8Mk2(k1+k)pix2
1
= pik2(k1+k)(T1+T2)2
2M(T2k1T1k)2> 0
(2.72)On remarque que CO(0, (x1)0) est toujours positif. La
condition de sta-
bilit est donc satisfaite. Lauto-oscillation dfinie par le
couple (0, (x1)0)est stable.
2.6 Auto-oscillation dissymtrique
2.6.1 Gnralits
Les auto-oscillations dissymtriques se produisent si : llment
nonlinaire est dissymtrique (Figure 2.18), il existe des
perturbations avec une composante continue (ou quasi-continue), mme
avec un lment non linaire symtrique.
36
-
+ M
- a M
x
w
Fig. 2.18 En raison des imperfections du composant, le relais
est dissy-mtrique : les valeurs de commutation du relais ne sont
pas opposes, maisvalent +M et M ( 6= 1). La sortie du relais
comporte alors une compo-sante continue non nulle.
Dans les deux cas, la sortie w de llment non linaire prsente
unevaleur moyenne non nulle. On peut lui associer le modle dentre
suivant :
x(t) = x0 + x1 sint. (2.73)
Si llment non linaire est sans inertie (cest--dire si la
caractristiquene dpend pas de ), on peut calculer lapproximation du
premier harmo-nique de la sortie w(t) = (x0 + x1 sint) :
w(t) w0(x0, x1) + b1((x0, x1) sint+ a1((x0, x1) cost, (2.74)avec
:
w0(x0, x1) =1T
T0 (x0 + x1 sint) dt,
b1(x0, x1) =2T
T0 (x0 + x1 sint) sint dt,
a1(x0, x1) =2T
T0 (x0 + x1 sint) cost dt.
(2.75)
2.6.2 Exemple : cas dun relais symtrique avec une entre
x0 + x1 sint
Llment non linaire est un relais seuil symtrique (Fig. 2.19)
dontlentre comporte une composante continue : x(t) = x0 + x1 sint.
La sortiedu relais w(t) suit la courbe de la figure 2.20 dont les
instants de commutationsatisfont :
x0 + x1 sint1 =
2, avec 0 < t1 < T/4,
x0 + x1 sint2 =
2, avec T/4 < t2 < T/2,
37
-
+ M
- M
x
w
+ D / 2- D / 2
Fig. 2.19 Caractristique non linaire du relais seuil
symtrique.
x0 + x1 sint3 = 2, avec T/2 < t3 < 3T/4,
x0 + x1 sint4 = 2, avec 3T/4 < t4 < T.
En tenant compte des symtries et en utilisant la dtermination
princi-pale de la fonction arcsin, on a les relations :
t1 = arcsin( 2x0
2x1
),
t2 = t1,t3 = + arcsin
(+ 2x02x1
),
t4 = 2 arcsin(+ 2x0
2x1
).
Calculons maintenant lapproximation du premier harmonique de la
sor-tie du relais, en commenant par la valeur moyenne w0(x0, x1)
:
w0(x0, x1) =1
T
T0
w(t) dt,
=1
T
[ t2t1
M dt+
t4t3
(M) dt],
=M
T(t2 t1 t4 + t3),
=M
T
[ 2 arcsin
( 2x02x1
) + 2arcsin
(+ 2x02x1
)],
=M
[arcsin
(+ 2x02x1
) arcsin
( 2x02x1
)].
38
-
+ M
- M
t
w ( t )
x ( t )
t
+ D / 2
- D / 2T / 2 T1t 2t3t 4t
T / 2 T1t 2t3t 4t
0x
Fig. 2.20 Sortie du relais seuil symtrique en rponse un signal
de laforme x0 + x1 sint.
39
-
+ M
x
w
D
D - hFig. 2.21 Caractristique du relais hystrsis non
symtrique.
Compte tenu de la symtrie de la sortie sur chaque alternance, le
coeffi-cient du terme en cost est nul : a1(x0, x1) = 0.
Calculons le coefficient b1(x0, x1) :
b1(x0, x1) =2
T
T0
w(t) sint dt,
=2
T
[ t2t1
M sint dt+
t4t3
(M) sint dt],
=2M
T( cost2 + cost1 + cost4 cost3),
=M
[2
1
( 2x02x1
)2+ 2
1
(+ 2x02x1
)2],
=2M
[1
( 2x02x1
)2+
1
(+ 2x02x1
)2].
Le calcul des cosinus partir des sinus exige de tenir compte de
la d-termination. Pour t1 et t2, les sinus sont gaux : sint1 =
sint2, et lescosinus valent : costi =
1 (sinti)2. Or les cosinus sont opposs :
cost1 = cost2, avec cost1 > 0. Il faut donc choisir la bonne
dtermi-nation (signe) de chaque racine carre.
2.6.3 Exemple : cas dun relais hystrsis dissymtrique
Considrons maintenant le relais hystrsis de la Figure 2.21 dont
lasortie prend les valeurs 0 ou M .
En raison de la dissymtrie du relais, lentre x(t) comprend une
com-posante continue et sous lhypothse du premier harmonique peut
scrire :x(t) = x0 + x1 sint. En rponse ce signal, la sortie w(t)
est reprsente la figure 2.22. La commutation 0M a lieu au temps t1
tel que :
x0 + x1 sint1 = , (2.76)
40
-
+ Mt
w ( t )
x ( t )
tD - h
T / 2 T1t 2t
1t 2t
0x
D
Fig. 2.22 Rponse du relais non symtrique.
avec 0 < t1 < /2, do lon dduit :
sint1 = x0x1
, (2.77)
cost1 = +
1
( x0x1
)2, (2.78)
t1 = arcsin( x0
x1
)(2.79)
La commutation M 0 a lieu au temps t2 tel que :x0 + x1 sint2 =
h, (2.80)
avec /2 < t2 < , do lon dduit :
sint2 = h x0
x1, (2.81)
cost2 =
1( h x0
x1
)2, (2.82)
t2 = arcsin( h x0
x1
). (2.83)
41
-
Calculons dabord la valeur moyenne w0(x0, x1) :
w0(x0, x1) =1
T
T0
w(t) dt,
=1
T
t2t1
M dt,
=M
T(t2 t1),
=M
T
[ arcsin
( h x0x1
) arcsin
( x0x1
)],
=M
2
[ arcsin
( h x0x1
) arcsin
( x0x1
)].
Calculons maintenant le coefficient b1(x0, x1) :
b1(x0, x1) =2
T
T0
w(t) sint dt,
=2
T
t2t1
M sint dt,
=2M
T( cost2 + cost1),
=M
[1
( h x0x1
)2+
1
( x0x1
)2].
Calculons enfin le coefficient a1(x0, x1) :
a1(x0, x1) =2
T
T0
w(t) cost dt,
=2
T
t2t1
M cost dt,
=2M
T(sint2 sint1),
=M
( h x0x1
x0x1
),
= Mhx1
.
42
-
+ +++
R e l a i s i d a l-
+e x w s)()(pQpR
)()(pQpS
g
Fig. 2.23 Asservissement avec perturbation.
2.6.4 Principe de dtermination des auto-oscillations
Les perturbations lentes sont modlises par un signal g trs
bassefrquence, filtr par S(p)/Q(p)3. Le modle est reprsent la
figure 2.23.
On peut donc crire les relations :x = e s,w = (x),
s = R(p)Q(p)w +S(p)Q(p)g,
(2.84)
qui donnent :Q(p)x+R(p)(x) = Q(p)e S(p)g. (2.85)
Pour tenir compte de la composante continue, on pose :
x = x0 + x, (2.86)
o x0 est le terme continu ou variation lente, et x est le terme
harmonique
de la forme x = x1 sint. De plus, sous lhypothse du premier
harmonique,la sortie de llment non linaire scrit :
(x) = w0(x0, x1) +N(x0, x1)x. (2.87)
Avec ces notations, lquation gnrale de lasservissement scrit
:
Q(p)(x0 + x) +R(p)(w0(x0, x1) +N(x0, x1)x
)= Q(p)e S(p)g. (2.88)
3On peut toujours mettre ce filtre sous cette forme, avec le
dnominateur Q(p) commun la partie linaire L(p) = R(p)/Q(p)
43
-
Elle peut alors tre dcompose en deux quations, lune
correspondantaux termes continus (cest--dire pour p = j = 0),
lautre aux termesharmoniques (p 6= 0) :{
Q(0)x0 +R(0)w0(x0, x1) = Q(0)e S(0)g,Q(p)x +R(p)N(x0, x1)x
= 0,(2.89)
car e et g, variations trs lentes, nont pas de composante
harmonique. Onremarque que ces deux quations dpendent des 3
variables x0, x1 et . Lapremire quation dcrit les variations lentes
de x0 et w0 en fonction de e etg ; la seconde dcrit les
auto-oscillations (x1, ) autour de x0.
En regroupant les termes rels et les termes imaginaires, on peut
crirela seconde quation sous la forme X(x0, x1, ) + jY (x0, x1, ) =
0, ce quirevient rsoudre le systme de deux quations trois inconnues
:{
X(x0, x1, ) = 0,Y (x0, x1, ) = 0.
(2.90)
En rsolvant, on peux exprimer deux des variables en fonction de
la troisime,par exemple : {
x1 = x1(x0), = (x0).
(2.91)
En reportant dans lexpression de w0(x0, x1) on obtient une
fonction nedpendant plus que de la variable x0, que nous noterons
w0(x0, x1) = F (x0).La premire quation peut alors scrire :
Q(0)x0 +R(0)F (x0) = Q(0)e S(0)g, (2.92)
qui ne dpend plus que de la variable x0. Aprs rsolution, on
obtient doncles solutions sous la forme de triplets (x0, x1, ).
2.6.5 Exemple dun asservissement relais avec perturba-
tion lente
Reprenons lexemple du paragraphe 2.5.4 dans lequel nous ajoutons
uneperturbation continue constante g(t) = g0 = cte filtre par
1/(p(1 + T2p))(Figure 2.24). Lentre est une rampe e(t) = e0t, o e0
est une constante.
44
-
pTk11
1 + )1( 22pTp
k+
+ ++ + R e l a i s i d a l
k
- -
ee sr x w +++
)1(12 pTp +
g 0
Fig. 2.24 Exemple dasservissement avec perturbation.
Equations
Ecrivons le systme dquations qui dcrit lasservissement : = e
s,
(1 + T1p)r = k1,x = r ksw = (x),
p(1 + T2p)s = k2w + g0.
(2.93)
Des deux premires quations de (2.93), on limine :
r =k1(e s)1 + T1p
, (2.94)
et de la dernire, on tire :
s =k2w + g0p(1 + T2p)
. (2.95)
En reportant dans la troisime quation, on peut liminer r et s et
ex-primer x uniquement en fonction de e et de g0 :
x =k1e
1 + T1p)(k +
k11 + T1p
) k2w + g0p(1 + T2p)
, (2.96)
que lon met sous la forme :
p(1+T2p)(1+T1p)x+k2(k+k1+kT1p)w =
k1p(1+T2p)e(k+k1+kT1p)g0.(2.97)
45
-
La rampe dentre e(t) = e0t vrifie pe = e0 = cte. Ainsi, en
posantx = x0 + x
, w = w0(x0, x1) +N(x0, x1)x, on dcompose lquation (2.97)
en deux quations, lune correspondant aux termes continus (p = 0)
et lautreaux termes harmoniques (p 6= 0) :{
k2(k + k1)w0(x0, x1) k1e0 + (k + k1)(k2g0) = 0,p(1 + T2p)(1 +
T1p)x
+ k2(k + k1 + kT1p)N(x0, x1)x = 0.
(2.98)
Solutions
En posant p = j, la seconde quation du systme (2.99) peut se
mettresous la forme complexe X(x0, x1, ) + jX(x0, x1, ) = 0, et est
quivalenteau systme :{
X(x0, x1, ) = (T1 + T2)2 + k2N(x0, x1)(k + k1) = 0,Y (x0, x1, )
= T1T23 +
(1 + kk2T1N(x0, x1)
)w = 0.
(2.99)
En liminant les termes en , on tire :
N(x0, x1) =T1 + T2
k2T1(k1T2 kT1) . (2.100)
De plus, le calcul du gain complexe quivalent du relais idal en
prsence duterme continue x0 est gal :
N(x0, x1) =4M
x1)
[1
(x0x1
)2]1/2. (2.101)
En reportant dans lquation prcdente, on a alors lquation :
4M
x1
[1
(x0x1
)2]1/2=
T1 + T2k2T1(k1T2 kT1) , (2.102)
qui ne fait intervenir que x0 et x1. On peut donc calculer la
solution x1(x0).Pour cela, posons :
x1 =4Mk2T1(k1T2 kT1)
(T1 + T2), (2.103)
(x1 correspond la solution pour x0 = 0), lquation (2.102) scrit
:[1
(x0x1
)2]1/2=x1x1. (2.104)
46
-
En levant au carr et en dveloppant, on a :(x0x1
)2+(x1x1
)2= 1(x1
x1
)4(x1x1
)2+(x0x1
)2= 0. (2.105)
En posant (x1/x1)2 = U et (x0/x1)
2 = C > 0, on a lquation bicarre :
U2 U + C = 0, (2.106)dont les solutions relles sont :
U =11 4C
2, (2.107)
pourvu que le discriminant soit positif : = 1 4C > 0, ou de
faon qui-valente |x0/x1| < 1/2.
On utilise maintenant le calcul de la valeur moyenne :
w0(x0, x1) =2M
arcsin
(x0x1
), (2.108)
dans laquelle on doit liminer la valeur de x1 partir du rsultat
prcdent.Pour que le relais change dtat, il faut que x1 > |x0|.
En utilisant lqua-
tion (2.105), posons alors sin(/2) = x0/x1 et cos(/2) = x1/x1.
En effet,lidentit sin2(/2) + cos2(/2) = 1 est identique lquation
(2.105) :(x0
x1
)2+(x1x1
)2= 1. (2.109)
Calculons alors sin :
sin = 2 sin(/2) cos(/2)
= 2x0x1
x1x1,
=2x0x1
. (2.110)
En reportant dans lexpression de w0(x0, x1) (2.108), on trouve
:
w0(x0, x1) =2M
arcsin(sin(/2)),
=M
,
=M
arcsin(sin),
=M
arcsin
(2x0x1
). (2.111)
47
-
+ M / 2x 0
w 0
- M / 22/1x
2/1x-
Fig. 2.25 Valeur moyenne w0 en fonction de la perturbation
continue x0.
++ R e l a i s i d a l-
e sx w)1( 1 pTp
k+
++-
R e l a i s s e u i l
1 / py
z
Fig. 2.26 Asservissement deux non linarits.
Cette formule est valable pour |x0| x1/2. Pour |x0| > x1/2
(discrimi-nant de lquation bicarre ngatif), le relais ne peut pas
changer dtat etil ny a plus dauto-oscillations. Lallure de la
fonction w0(x0, x1) est donne la figure 2.25.
2.7 Asservissement plusieurs non linarits
Il ny a pas de mthode gnrale pour tudier les systmes
plusieursnon linarits. Lide consiste essayer de fusionner les
lments non linairesafin de se ramener un systme canonique. Nous
allons illustrer cette idesur un exemple.
2.7.1 Systme tudi
Considrons lasservissement de la figure 2.26 qui possde deux
lmentsnon linaires dont les caractristiques sont prcises la figure
2.27. Lesvaleurs de commutation du relais idal sont M . Le relais
seuil commutede 0 vers M lorsque lentre atteint /2.
48
-
xy
- M
+ M + M
- M
w
z
+ D / 2- D / 2
Fig. 2.27 Caractristiques des deux relais du systme 2.26.
2.7.2 Non linarit quivalente
On se place sous lhypothse du premier harmonique4, cest--dire
quelexcitation x est suppose de la forme x(t) = x1 sint. Lobjectif
est detrouver la non-linarit quivalente au bloc entour en
pointill.
La sortie y du relais idal est donc un signal carr dont les
commutationsse font au passage par zro de x.
Devant lintgrateur, on a alors y z = y si z = 0, cest--dire tant
que|w(t)| < /2. La sortie w vaut alors :
w(t) =
y(t)dt = Mt+ cte, (2.112)
le signe dpendant de la sorite y du relais idal.
Lorsque |w(t)| = /2, la sortie z du relais seuil passe M . De
faonplus prcise,
si le relais idal est y = +M , la sortie de lintgrateur vaut
w(t) =+Mt + cte jusqu w(t) = +/2 qui entrane la commutation z =+M .
Lentre de lintgrateur vaut alors y z = 0 si bien que la sortiede
lintgrateur w reste constante : w(t) = +/2, jusquau changementdtat
du relais idal. Lorsque celui-ci commute M , lentre delintgrateur
vaut (pendant un trs bref instant) y z = M M =2M , la sortie de
lintgrateur diminue et z commute vers 0 et entraney z = M .
4La partie linaire se comporte comme un filtre passe-bas dordre
2 : la condition defiltrage est satisfaite
49
-
tx , y e t w
- M
+ M+ D / 2
- D / 2
xyw
t 1
Fig. 2.28 Caractristique quivalente w(t) (trait plein) des deux
relais etde lintgrateur du systme 2.26. Lexcitation x(t) est en
pointill, la sortiey du relais est en tirets.
si le relais idal est y = M , la sortie de lintgrateur vaut w(t)
=Mt + cte jusqu w(t) = /2 qui entrane la commutation z =M . Lentre
de lintgrateur vaut alors (pendant un trs bref instant)y z = 0 si
bien que la sortie de lintgrateur w reste constante :w(t) = /2,
jusquau changement dtat du relais idal. Lorsquecelui-ci commute +M
, lentre de lintgrateur vaut y z = +M (M) = +2M , la sortie de
lintgrateur augmente et z commute vers0 entranant y z = +M .
On remarque quen raison de lintgrateur, le signal w(t) dpend de
lapulsation de lexcitation. De plus, on voit facilement que w(t)
est dphaspar rapport x(t). Le gain complexe quivalent est donc
complexe et de laforme N(x1, ).
2.7.3 Calcul du gain complexe quivalent
En raison de la symtrie, la valeur moyenne de w(t) est nulle.
Calculonsles termes b1 et a1.
b1 =2
T
T0
sin(t)w(t) dt,
50
-
=4
T
T/20
sin(t)w(t) dt,
=4
T
[ t10
sin(t) (Mt/2) dt+ T/2t1
sin(t) (/2) dt],
=4
T
[M
t10
t sin(t) dt (/2) t10
sin(t) dt+ (/2)
T/2t1
sin(t) dt],
=4
T
[M
[ t cost
]t10+M
t10
cos(t) dt
+
2
[cost
]t10
2
[cost
]T/2t1
],
=4
T
[ M
t1 cost1 +
M
2sint1 +
cost1
],
=4
T
M
2sint1,
=2M
sint1. (2.113)
Dans la suite, on posera sint1 = sin(2), et on utilisera :
b1 =2M
sin 2. (2.114)
De faon similaire, on calcule a1 :
a1 =2
T
T0
cos(t)w(t) dt,
=4
T
T/20
cos(t)w(t) dt,
=4
T
[ t10
cos(t) (Mt/2) dt+ T/2t1
cos(t) (/2) dt],
=4
T
[M
T/20
t cos(t) dt (/2) t10
cos(t) dt+ (/2)
T/2t1
cos(t) dt],
=4
T
[M
[t sint
]t10 M
t10
sin(t) dt
2
[sint
]t10+
2
[sint
]T/2t1
],
=4
T
[Mt1 sint1 +
M
2(cost1 1)
sint1
]. (2.115)
En remarquant quau temps t1, on a w(t1) = /2 = Mt1/2, cest--dire
t1 = /M , on peut simplifier la dernire relation :
51
-
a1 =4
T
M
2(cost1 1),
=2M
(cos 2 1),
= 4M
sin2 . (2.116)
Le gain complexe quivalent du bloc pointill scrit donc :
N(x1, ) =b1 + ja1
x1,
=2M
x1(sin 2 2j sin2 ). (2.117)
2.7.4 Dtermination des auto-oscillations
Les auto-oscillations sont les couples (x1, ) satisfaisant
lquation L(j) =1/N(x1, ) :
k
j(1 + jT1)= x1
2M(sin 2 2j sin2 ) . (2.118)
Or = t1/2 = /2M , on arrive lquation complexe :
2kM(sin 2 2j sin2 ) + 2Mx1
(j T12) = 0(sin 2 x12T1
k
)+ j(x1
k 2 sin2
)= 0, (2.119)
qui est quivalent au systme :{sin 2 = x1
2 piT1k
2 sin2 = x1pik .
(2.120)
En utilisant sin 2 = 2 sin cos, on a :{2 sin cos = x1
2 piT1k
2 sin2 = x1pik ,
(2.121)
puis en divisant la seconde quation par la premire :
tan =
2MT1. (2.122)
52
-
wp / 2
t g w1 / w
V a l e u r s s u c c e s s i v e s c a l c u l e s p a r t i r
d el a v a l e u r i n i t i a l e w = p / 4 . O n p r e n d r a c
o m m e s o l u t i o n : w = 0 , 8 6 .
w 1 / w A r c t g ( 1 / w )0 , 7 8 1 , 2 7 0 , 9
0 , 9 1 , 1 0 6 0 , 8 3 6
0 , 8 3 6 1 , 1 9 6 0 , 8 7 5
0 , 8 7 5 1 , 1 4 3 0 , 8 5 2
0 , 8 5 2 1 , 1 7 4 0 , 8 6 5
0 , 8 6 5 1 , 1 5 6 0 , 8 5 8
0 , 8 5 8 1 , 1 6 6 0 , 8 6 2
0 , 8 6 2 1 , 1 6 0 , 8 5 9
0 , 8 5 9 1 , 1 6 4 0 , 8 6 1
0 , 8 6 1 1 , 1 6 2 0 , 8 6
Fig. 2.29 Rsolution idrative de lquation tan = 1/.
Cette quation peut tre rsolue graphiquement ou itrativement
(Fig.2.29). Avec les valeurs numriques T1 = 1s, k = 3, 14, M = 1 et
= 2,lquation (2.123) se rduit :
tan =1
, (2.123)
dont la solution est = 0, 86 rd/s. On en dduit ensuite x1 en
reportantdans une des deux quations du systme (2.121) :
x1 =4 sin2
2= 3, 11. (2.124)
Il faudrait ensuite vrifier (ce que lon admettra) que cette
auto-oscillationest stable.
2.8 Conclusions sur la mthode du premier harmo-
nique
La mthode du premier harmonique est une mthode applicable
lacondition que les parties non linaire et linaire de
lasservissement soient
53
-
sparables et que la partie linaire se comporte comme un filtre
passe-bas.
Cest une mthode approche, puisquelle nglige les termes
harmoniquesdordre suprieur 1, mais elle est malgr tout prcise si
ces conditions sontvrifies.
54
-
Chapitre 3
Mthode du plan de phase
3.1 Introduction
La mthode du plan de phase est un cas particulier de la mthode
delespace de phase, dans le cas o lespace est de dimension 2. Cette
mthodesapplique de faon trs gnrale tout systme dcrit par un
ensembledquations diffrentielle. En revanche, il nexiste pas
toujours de solutionsanalytiques aux trajectoires calcules dans
lespace des phase. Cette m-thode, connue depuis longtemps, connat
un regain dintrt li aux perfor-mances des calculateurs actuels qui
rendent possible le calcul des trajectoiressolutions par intgration
numrique. Dans le cadre des systmes asservis nonlinaires, cette
mthode est exacte et ne suppose pas de condition particu-lire,
contrairement la mthode du premier harmonique.Ce chapitre est
organise en deux parties principales. La premire prsenteles
fondements mathmatiques. La seconde partie propose une tude
appro-fondie dans le cas dasservissements relais.
3.2 Fondements mathmatiques
3.2.1 Principe gnral
On considre un systme physique dcrit par le systme dquations
dif-frentielles de la forme :
dxi(t)
dt= Xi(x1, x2, . . . , xn), 1 i n, (3.1)
avec n conditions initiales xi(0) = xi0.
55
-
Lespace de dimension n rapport aux variables xi est appel espace
dephase. Dans cet espace, les conditions initiales correspondent un
point M0,et la solution pour t > 0 est de la forme M(t) =
(x1(t), . . . , xn(t))
T : cestune trajectoire dans lespace de phase.
La dtermination de cette trajectoire est une mthode rigoureuse
dtudede systmes non linaires. Elle est particulirement simple
mettre en oeuvrelorsquil sagit dasservissements non linaires dcrits
par des quations dif-frentielles non linaires dordre 2 : dans ce
cas, lespace des phase se rduit un espace de dimension 2 : le plan
de phase.
Les fonctions Xi(x1, x2, . . . , xn) sont en gnral non linaires
et le calculanalytique de M(t) est souvent impossible. Cependant,
les calculateurs ac-tuels permettent de rsoudre ces quations par
intgration numrique. Dansla suite, on restreindra ltude au cas n =
2.
3.2.2 Points singuliers
On considre dans cette partie un systme physique, par exemple
unsystme asservi, dcrit par un systme diffrentiel de forme
canonique :{
x1(t) = X1(x1, x2),x2(t) = X2(x1, x2).
(3.2)
Dans le plan de phase lquation des trajectoires est la solution
de lqua-tion diffrentielle du premier ordre :
dx2dx1
=X2(x1, x2)
X1(x1, x2), (3.3)
avec deux conditions initiales.
Dfinition de point singulier
Lquation (3.3) prcise de faon unique la tangente en chaque point
dela trajectoire, sauf aux points singuliers. Do la dfinition :
Dfinition 3.2.1 Etant donn le systme canonique (3.2), (x10, x20)
est unpoint singulier si {
X1(x10, x20) = 0,X2(x10, x20) = 0.
(3.4)
56
-
En effet, en un tel point, le rapport dx2dx1 nest pas dfini.
On montre lunicit de la tangente dans un domaine (D) si : X1(x1,
x2) etX2(x1, x2) sont uniformes, bornes et continues dans (D),
leurs drives partielles sont bornes dans ce domaine sauf aux
pointssinguliers (conditions de Lipschitz1).
Les points singuliers sont des positions dquilibre du systme. En
effet,{X1(x1, x2) = x1(t) = 0 = la vitesse de x1 est nulleX2(x1,
x2) = x2(t) = 0 = la vitesse de x2 est nulle. (3.5)
Ce point singulier sera stable si toutes les trajectoires de
phase concourentvers ce point, instable dans le cas contraire,
cest--dire si certaines (il ensuffit dune) trajectoires sen
cartent.
3.2.3 Cas dune quation diffrentielle dordre 2
Soit un systme dcrit par une quation diffrentielle dordre 2, de
laforme :
d2x
dt2+A(x)
dx
dt+B(x)x = F (x). (3.6)
Il est facile de montrer que cette quation se met sous la forme
canonique(3.2). En effet, posons y = dx/dt, lquation (3.7) devient
:
dy
dt+A(x)y +B(x)x = F (x). (3.7)
Lquation est donc quivalente au systme canonique :{ dxdt = ydydt
= A(x)y B(x)x+ F (x).
(3.8)
Dans ce cas, le plan de phase est le plan de coordonnes (x, y)
avecy = dx/dt.
3.2.4 Stabilit en un point singulier
Soit (x10, x20) un point singulier. Nous choisissons ce point
singuliercomme nouvelle origine du plan. On peut alors crire :{
x1 = x10 + x1x2 = x20 + x2.
(3.9)
1Rudolf Lipschitz : mathmaticien allemand 1832 1903
57
-
De plus, nous supposons que X1(x1, x2) et X2(x1, x2) sont
continuementdrivables au voisinage du point singulier. Sous cette
hypothse, on peutlinariser le systme canonique au voisinage du
point singulier, en faisant undveloppement au premier ordre :{
d(x10+ex1(t))dt = X1(x10, x20) +
X1x1
x1 +X1x2
x2 +O(x1, x2)d(x20+ex2(t))
dt = X2(x10, x20) +X2x1
x1 +X2x2
x2 +O(x1, x2).(3.10)
Puisque (x10, x20) est un point singulier,X1(x10, x20) = X2(x10,
x20) = 0.De plus, x10 et x20 tant des constantes, on a d(x10 +
x1(t)/dt = dx1(t)/dtet d(x20 + x2(t)/dt = dx2(t)/dt. A partir de
ces remarques et en ngligeantles termes dordre suprieur, le systme
ci-dessus se simplifie :{
dex1(t)dt =
X1x1
x1 +X1x2
x2dex2(t)dt =
X2x1
x1 +X2x2
x2.(3.11)
En notant X = (x1, x2)T et en introduisant la matrice Jacobienne
J :
J =
(X1x1
X1x2
X2x1
X2x2
), (3.12)
on peut mettre lquation (3.11) sous forme vectorielle :
dX
dt= JX. (3.13)
Le systme (3.13) est un systme diffrentiel linaire coefficients
constantqui dcrit le comportement du systme au voisinage du point
singulier (x10, x20).
3.2.5 Rappel sur la rsolution dun systme diffrentiel li-
naire
Rappelons brivement la mthode de rsolution dun systme
difrentiellinaire coefficients constants, de la forme :
dX
dt=MX, (3.14)
o M est une matrice carre.
On cherche des solutions de la forme :
X = exp(t), (3.15)
58
-
o et sont respectivement un vecteur et un scalaire dterminer.
Aveccette forme de solution, on dduit :
dX
dt= exp(t). (3.16)
En reportant dans le systme (3.14), cette solution doit
satisfaire (t) larelation :
exp(t) =M exp(t), (3.17)
cest--dire :(M I) = 0, (3.18)
o I reprsente la matrice identtit. Cette quation a une solution
non triviale(diffrente de = 0) si et seulement si det(M I) = 0.
Les solutions et sont donc les vecteurs et valeurs propres de la
ma-trice M.
Pour les calculer, dterminons dabord partir de lquation
caract-ristique (dveloppe ici dans le cas o M est de dimension 2)
:
det(M I) = 0 m11 m12m21 m22 = 0
(m11 )(m22 )m12m21 = 02 (m11 +m22)+ (m11m22 m12m21) = 0.
(3.19)
Cette quation polynomiale de degr 2 coefficients rels possde 2
solutionsdans C, que nous noterons 1 et 2. En reportant chacune de
ces valeurs idans lquation (3.18), on calcule les vecteurs propres
i associs, solutionsde :
(M iI) = 0. (3.20)Les solutions du systme sont alors de la forme
:
X(t) = C11 exp(1t) + C22 exp(2t), (3.21)
o C1 et C2 sont deux constantes arbitraires.
3.2.6 Nature des points singuliers
En rsolvant le systme diffrentiel (3.13), dont les solutions
sont lesvaleurs et vecteurs propres de la matrice Jacobienne J, on
trouve donc lasolution :
X(t) = C11 exp(1t) + C22 exp(2t), (3.22)
59
-
qui dcrit les trajectoires solutions au voisinage du point
singulier. Pour quele point singulier soit stable, il faut
quasymptotiquement, cest--dire pourt +, toute trajectoire revienne
au point initial, cest--dire X(t) 0.Cette condition est vrifie si
et seulement si les valeurs propres 1 et 2ont des parties relles
ngatives. Ltude des valeurs propres permet ainsi decaractriser
lallure gnrale des trajectoires autour dun point singulier.
Les valeurs propres sont relles et ngatives
On suppose pour la discussion que 1 < 2 < 0. On sait que
toutes lestrajectoires convergent vers le point : le point
singulier est un point dqui-libre stable du systme.
Pour tudier de faon plus prcise lallure des trajectoires,
supposons quelon choisisse la trajectoire telle que C2 = 0 :
X(t) = C11 exp(1t), (3.23)
que lon peut crire :
x1(t) = C1(1)1 exp(1t),
x2(t) = C1(1)2 exp(1t), (3.24)
o (j)i est la composante i du vecteur propre j . Dans le plan de
phase,la trajectoire est porte par la droite
x2 =(1)2(1)1
x1, (3.25)
et converge vers le point singulier lorsque t crot.
Avec un calcul similaire, pour la condition C1 = 0, on trouve
que latrajectoire est porte par la droite :
x2 =(2)2(2)1
x1, (3.26)
et converge aussi vers le point singulier, lorsque t crot.On
remarque que ces deux droites sont colinaires aux deux vecteurs
propres 1 et 2.
60
-
Considrons maintenant une trajectoire quelconque (C1 et C2 sont
dif-frents de zro). Initialement, cest--dire pour t , on a exp(1t)
exp(2t) et par consquent :
x1(t) C1(1)1 exp(1t),x2(t) C1(1)2 exp(1t), (3.27)
cest--dire que les trajectoires partent de la direction
asymptotique du vec-teur propre 1 :
x2 =(1)2(1)1
x1. (3.28)
Avec un raisonnement similaire, pour t +, on a exp(2t) exp(1t)et
par consquent :
x1(t) C2(2)1 exp(2t),x2(t) C2(2)2 exp(2t), (3.29)
cest--dire que les trajectoires tendent vers la direction
asymptotique duvecteur propre 2 lorsque t + :
x2 =(2)2(2)1
x1. (3.30)
Un tel point est appel un noeud stable. Lallure des trajectoires
en untel point est indique la figure 3.1.
Les valeurs propres sont relles et positives
On suppose pour la discussion que 1 > 2 > 0. On sait que
toutes lestrajectoires divergent : le point singulier est un point
dquilibre instable dusystme.
Pour tudier de faon plus prcise lallure des trajectoires,
considrons latrajectoire telle que C2 = 0 :
X(t) = C11 exp(1t), (3.31)
que lon peut crire :
x1(t) = C1(1)1 exp(1t),
x2(t) = C1(1)2 exp(1t), (3.32)
61
-
d i r e c t i o nd e L
2
d i r e c t i o nd e L
1
Fig. 3.1 Toutes les trajectoires dun noeud stable concourrent
vers le pointsingulier.
o (j)i est la composante i du vecteur propre j . Dans le plan de
phase,la trajectoire est porte par la droite
x2 =(1)2(1)1
x1, (3.33)
et sloigne du point singulier lorsque t crot.Avec un calcul
similaire, pour la condition C1 = 0, on trouve que la
trajectoire est porte par la droite :
x2 =(2)2(2)1
x1, (3.34)
et sloigne aussi du point singulier lorsque t crot.
Considrons maintenant une trajectoire quelconque (C1 et C2 sont
dif-frents de zro). Initialement, cest--dire pour t , on a exp(2t)
exp(1t) et en ngligeant les termes en exp(1t), on a :
x1(t) C2(2)1 exp(2t),x2(t) C2(2)2 exp(2t), (3.35)
cest--dire que les trajectoires partent de la direction
asymptotique :
x2 =(2)2(2)1
x1. (3.36)
62
-
d i r e c t i o nd e L
2
d i r e c t i o nd e L
1
Fig. 3.2 Les trajectoires dun noeud instable sloignent du point
singulier.
Avec un raisonnement similaire, pour t +, on a exp(1t) exp(2t)et
par consquent :
x1(t) C1(1)1 exp(1t),x2(t) C1(1)2 exp(1t), (3.37)
cest--dire que les trajectoires suivent la direction
asymptotique du vecteurpropre 1 lorsque t + :
x2 =(1)2(1)1
x1. (3.38)
Un tel point est appel noeud instable. Lallure des trajectoires
en un telpoint est indique la figure 3.2.
Les valeurs propres sont relles et de signes contraires
On suppose pour la discussion que 1 < 0 < 2. Puisquune des
valeurspropres est positive, on sait que le point singulier est un
point dquilibreinstable du systme.
Pour tudier de faon plus prcise lallure des trajectoires,
considrons latrajectoire telle que C2 = 0 :
X(t) = C11 exp(1t), (3.39)
63
-
dont la trajectoire, porte par la droite :
x2 =(1)2(1)1
x1, (3.40)
converge (car 1 < 0) vers le point singulier lorsque t
crot.
De mme, pour la condition C1 = 0, on trouve que la trajectoire
estporte par la droite :
x2 =(2)2(2)1
x1, (3.41)
et sloigne (car 2 > 0) du point singulier lorsque t crot.
Considrons maintenant une trajectoire quelconque (C1 et C2 sont
dif-frents de zro). Initialement, cest--dire pour t , on a exp(1t)
exp(2t) et par consquent :
x1(t) C1(1)1 exp(1t),x2(t) C1(1)2 exp(1t), (3.42)
cest--dire que les trajectoires partent de la direction
asymptotique :
x2 =(1)2(1)1
x1. (3.43)
Avec un raisonnement similaire, pour t +, on a exp(2t) exp(1t)et
par consquent :
x1(t) C2(2)1 exp(2t),x2(t) C2(2)2 exp(2t), (3.44)
cest--dire que les trajectoires suivent la direction
asymptotique du vecteur2 pour t + :
x2 =(2)2(2)1
x1. (3.45)
Un tel point (instable) est appel col ou selle. Lallure des
trajectoiresest indique la figure 3.3.
64
-
d i r e c t i o nd e L
2
d i r e c t i o nd e L
1
Fig. 3.3 Les trajectoires dun col sloignent du point
singulier.
Les valeurs propres sont complexes
Les coefficients de lquation caractristique tant rels, les
racines sontcomplexes conjugues, cest--dire de la forme 1 = h+ j et
2 = h j.Les solutions scrivent : x1(t) = expht
[C1(1)1 exp(jt) + C2(2)1 exp(jt)
],
x2(t) = expht[C1(1)2 exp(jt) + C2(2)2 exp(jt)
].
(3.46)
En posant exp(jt) = cost+ j sint, ces quations deviennent :
x1(t) = expht[C11 cost+ C12 sint
],
x2(t) = expht[C21 cost+ C22 sint
],
(3.47)
avec C11 = C1(1)1+C2(2)1, C12 = j(C1(1)1C2(2)1), C21 =
C1(1)2+C2(2)2 et C22 = j(C1(1)2 C2(2)2).
Pour h < 0, la trajectoire est une spirale dont le rayon
dcrot, cest--dire tend vers 0 : la trajectoire converge vers le
point singulier (Fig. 3.4.a).Le point singulier est alors un foyer
stable.
Pour h > 0, la trajectoire est une spirale dont le rayon
crot, cest--diretend vers + : la trajectoire diverge du point
singulier (Fig. 3.4.b). Le pointsingulier est alors un foyer
instable.
65
-
a b
Fig. 3.4 Les trajectoires au voisinage dun foyer sont des
spirales conver-gentes pour les foyers stables (a) ou divergentes
pour les foyers instables(b).
Cas o h = 0
Dans ce cas, les trajectoires sont des ellipses centres autour
du pointsingulier. Dun point de vue physique, la valeur h = 0
signifie que le systmeest sans perte (systme conservatif), ce qui
nest pas possible. En ralit, onse trouve dans un cas critique de
Liapunov qui est d au fait que lapproxi-mation du premier ordre au
voisinage du point singulier nest pas suffisante.Il faudrait alors
reprendre lcriture des quations avec un dveloppement lordre 2.
Autres cas
Dautres cas particuliers (une valeur propre nulle, valeurs
propres iden-tiques, etc.) pourraient tre tudis, mais seront luds
dans ce cours. Cesont notamment le cas o les deux valeurs propres
sont identiques et celuio une des valeurs propres est nulle.
3.2.7 Segments singuliers
Si le systme, X1 = 0 et X2 = 0, admet pour solution un segment
ou unaxe, ce lieu dtermine une infinit de points singuliers qui
sont des pointsdquilibre, stables ou instables. Cette situation est
tout fait usuelle dans lessystmes asservis non linaires, ds lors
que la non-linarit prsente un seuilou un jeu. Nous allons illustrer
cette situation par un exemple de mcanique.
Le systme et ses quations
On considre une masse M ancre par des ressorts de raideur k/2.
Cettemasse peut se dplacer sur un seul axe, x. Elle glisse avec
frottements secs
66
-
constants, de valeur f0, qui sopposent au mouvement. En
appliquant lqua-tion fondamentale de la dymanique, iFi = Mx, on a
:
Mx = kx signe(x)f0, (3.48)o signe(x) = +1 si x > 0 et 1 dans
le cas contraire. Pour quil y aitmouvement, il faut que la force de
rappel des ressorts soit suprieure auxfrottements, cest--dire |x|
> f0/k. Pour des longations infrieures, le mo-bile reste fixe :
le systme possde donc une infinit de position
dquilibrecorrespondant au segment [f0/k, f0/k]. Ce segment est donc
un segmentsingulier.
En posant y = x et x = x, on peut transformer cette quation
diffren-tielle dordre 2 en un systme diffrentielle de deux quations
:{
x = y
y = kM x f0M signe(y).(3.49)
Ce systme est non linaire dans la mesure o la seconde quation
diffreselon le signe de y.
Solutions
Pour y > 0, signe(y) = +1 et le systme scrit :{x = y
y = kM x f0M .(3.50)
Puisque u = du/dt, en faisant le rapport des deux quations, on
limine dtet on a :
dy
dx= k
M
x
y f0My
, (3.51)
qui est une quation diffrentielle variable sparable :
ydy +k
M(x+
f0k)dx = 0. (3.52)
En intgrant, on trouve :
y2
2+k(x+ f0k )
2
2M= cste. (3.53)
67
-
Les diffrents paramtres tant positifs, la constante est
ncessairementpositive, et nous la noterons R2 :
y2 +k(x+ f0k )
2
M= R2. (3.54)
Dans le plan (xk/M, y), en posant h = f0/k, la solution (3.54)
est
lquation dun cercle de centre (hk/M, 0) et de rayon R, qui dpend
de
la condition initiale.
Pour y < 0, signe(y) = 1 et le systme scrit :{x = y
y = kM x+ f0M .(3.55)
Ce systme ne diffre de (3.50) que par le signe ngatif devant f0.
Lessolutions sont donc similaires, au signe prs devant f0 :
y2 +k(x f0k )2
M= R2. (3.56)
Dans la plan xk/M, y, avec la notation h = f0/k, la solution
(3.56) est
lquation dun cercle de centre (+hk/M, 0) et de rayon R, qui
dpend de
la condition initiale.
Trajectoires
Dans la plan de phase (x, y), les trajectoires sont reprsentes
la figure3.5, pour deux conditions initiales particulires, (xi, 0).
Ces conditions dter-minent la valeur du rayon du cercle solution. A
chaque croisement de laxedes x, il y a changement de signe de y,
donc changement dquations et detrajectoires solutions : la
constante de la solution est alors dtermine parcontinuit. On
remarque que le mobile sarrte en un point quelconque dusegment
singulier, dpendant notamment du point initial.
Le sens des trajectoires est dtermin par les coordonnnes du plan
dephase : (x, y = dx/dt). Laxe des ordonnes correspond donc la
variablevitesse de x. On doit donc avoir y > 0 lorsque x crot.
Le sens des trajectoiresest donc obligatoirement celui des
aiguilles dune montre. Le sens inverseserait absurde !
68
-
Calcul du temps de trajet le long dune trajectoire
En remarquant que y = dx/dt, une petite variation de temps
associe un petit dplacemnt dx sexprime dt = dx/y. Par intgration on
peutcalculer le temps T pour aller dune longation xi une longation
xf :
T =
xfxi
dx
y. (3.57)
Dans chaque cas particulier, en utilisant lquation de la
trajectoire, onpeut exprimer y = y(x) et intgrer.
Dans le cas particulier du mobile avec frottements secs,
calculons le tempsmis pour parcourir le premier demi-cercle de la
trajectoire (1). Cette trajec-toire correspond y < 0 et daprs
lquation (3.56), on tire :
y = R2 k(x
f0k )
2
M, (3.58)
avec xi = +h+RM/k et xf = +hR
M/k.
En reportant dans lquation (3.57), on a lintgrale :
T = +hRM/k+h+R
M/k
dxR2 k(xh)2M
. (3.59)
Faisons le changement de variable (x h)k/M/R = U . La
relationentre lments diffrentiels est dx = R
M/kdU , et les bornes de lintgrales
deviennent xi Ui = +1 et xf Uf = 1, do lintgrale :
T = Mk
1
+1
dU1 U2 . (3.60)
Posons maintenant U = cos , on dduit dU = sin d et les bornes Ui
=1 i = 0 et Uf = 1 f = . On a finalement :
T =M
k
pi0d =
M
k. (3.61)
Bien sr, cette mthode permet de calculer le temps mis pour
parcourirun segment quelconque de trajectoire : il suffit de
dterminer les longationsinitiales et finales. Pour une trajectoire
correspondant un angle au centre, on trouvera simplement T = Mk
.
69
-
yMkxM
kh
Mkh-
( 2 )
( 1 )
Fig. 3.5 Dans le plan de phase, la trajectoire de la masse M est
une suc-cession de demi-cercles. Le point darrt est un point
quelconque du segmentsingulier, qui dpend du point initial.
3.2.8 Cycles limites
Dans le cas gnral, un cycle limite stable dans le plan de phase
est as-soci une auto-oscillation (physiquement observable) de
lasservissement.Ce cycle stable peut entourer un foyer instable, un
noeud instable ou unsegment dquilibre instable.
Le cycle limite peut aussi tre instable : il est alors associ
une auto-oscillation (non physiquement observable) de
lasservissement. Un tel cycleentoure un foyer, un noeud ou un
segment stable : pour une petite variationvers lintrieur, la
trajectoire ne reste pas sur le cycle, mais va converger versle
point ou le segment singulier.
Quelques situations de cycles limites stables et instables sont
illustres la figure 3.6.
3.3 Etude dasservissements relais
On considre un asservissement de la forme canonique propose
lafigure 3.7 dans lequel la non-linarit est un lment commutation :
relaislectromcanique ou dispositif lectronique (transistor ou
thyristor). Dans
70
-
yx
y
x
y
x
y
x
a b
c d
Fig. 3.6 Quelques exemples de cycles-limites stables (a et b) et
instables(c et d).
)1( T ppk+
++ R e l a i s-
e xwe
Fig. 3.7 Asservissement relais.
le cas le plus gnral (relais avec seuil et hystrsis), la sortie
peut prendre3 tats possibles : 0 et M . En notant w() = Mf() la
sortie de la non-linarit attaque par une entre , la fonction f()
peut alors prendre les3 valeurs 0 et 1. Dans cette partie, on
considre e = 0, cest--dire quelentre du relais satisfait : = x.
Lasservissement satisfait les quations :
Tx + x = kMf(), (3.62)
o x = dx/dt.
71
-
Posons les nouvelles variables de temps et despace :
t =t
Tet u =
x
kMT, (3.63)
on en dduit :
v =du
dt=du
dx
dx
dt
dt
dt=
1
kMTxT =
x
kM
v =dv
dt=
dv
dxdx
dt
dt
dt=
1
kMxT =
xT
kM. (3.64)
Avec ces notations, lquation (3.65) devient :
u+ u = f(ukMT ), (3.65)o u = du/dt et u = d2u/dt2.
La fonction f(.) ne pouvant prendre que les trois valeurs 0 et
1, on voitque, pour chaque ltat du relais, lasservissement est
dcrit par une quationdiffrentielle particulire. Ces quations ne
diffrent que par une constante,et sont de la forme :
u+ u = , (3.66)
ou encorev + v = , (3.67)
avec = f(ukM) et v = u.
3.3.1 Solutions dans le plan de phase
En intgrant lquation (3.67), on a :
v(t) = C