Embed Size (px)
Citation preview

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 1
Konzeptentwicklung und Umsetzung eines selbst
Balancierenden Elektroroller
Im Rahmen der Veranstaltungen: „Lehrforschungsprojekt“ SS2012
und „Fertigungsmesstechnik zur Qualitätsverbesserung“ WS2012/13
1. & 2. Semester Management & EngineeringAnthimos Georgiadis, Prof. Dr. rer. nat. Prof. h.c.
Hans-Christian OttoGerrit Mank
Christian StelterSimon Schmidt

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 2
Aufgabenstellung und Ausgangssituation
Ausgangssituation:
• Es wurde ein Open-Source-Bausatz gekauft
• Auffällig hier: die mangelhafte Verarbeitung
• Sicherheitseinrichtungen nicht vorhanden oder schlecht umgesetzt
Aufgabenstellung:
• Komplette Neu-Konstruktion (Mechanik, Elektronik, Regelung)
• Komplette Neu-Fertigung aller Mechanikkomponenten
• Sicherheitseinrichtungen verbessern
• Erweiterung mit neuen Komponenten (Display usw.)
• Möglichst geringer Kostenaufwand

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 3
Konzeptfindung
Basisanforderungen: • Selbstständiges Ausbalancieren des Rollers im Stand • Selbstständiges Ausbalancieren des Rollers während der Fahrt • Reichweite von 5km
Leistungsanforderungen: • Leichtbauweise • Intuitives Handling durch Joystick anstelle von Schalter • Belastbar bis min. 120 kg • Sicherheitsschalter, um das Unfallrisiko zu minimieren
Begeisterungsanforderungen: • Zerlegbar, leicht zu transportieren • Gimmicks, wie bspw. Ständer, Beleuchtung uvm.

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 4
Technischer AufbauElektronik
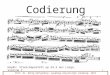
Bei der Entwicklung des Rollers wurde darauf geachtet, dass die Steuerplatine für zukünftige Erweiterungen noch genug Leistungsreserven besitzt. Darum sitzt auf der CPU Platine ein neuer ARM Cortex-M3 Mikrocontroller mit vielen Komponenten wie: USB, CAN, UART, PWM usw. Die Endstufen sind ebenfalls mit einer sehr großen Leistungsreserve ausgestattet.
- ARM Cortex-M3 Mikrocontroller mit 96 MHz und 512 kB Flashspeicher
- 2 Endstufenplatinen mit jeweils zwei Leistungsmosfet Halbbrücken (110A)
- 2 Gleichstrommotoren (Bürsten) mit je 12V und 200W- 2 Bleigel-Akkumulatoren mit je 12V und 9 Ah- 2,1“ Farbdisplay zur Anzeige von allen Details- Joystick zum Lenken- Geschwindigkeit ca. 15 km/h (mehr nicht getestet)

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 5
Technischer AufbauElektronik

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 6
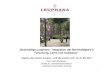
Technischer AufbauRegler
• Genereller Aufbau der PID Regelung• Vorteile dieses Konzepts: einfach zu implementieren• Nachteile: Regelung von nur einer Größe (Abhilfe schafft hier die Kaskadierung)

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 7
Technischer AufbauRegler

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 8
Technischer AufbauMechanik
Bei der mechanischen Konstruktion sind einige wichtige Richtlinien zu beachten:
• Der Roller soll möglichst stabil, gleichzeitig aber auch möglichst leicht konstruiert werden
• Der Scooter soll eine möglichst gute Fahrerergonomie ermöglicht, gleichzeitig soll aber auch ein ausbalanciertes Modell geschaffen werden
Konstruiertes Modell erfüllt alle Ansprüche
• 3,0 mm starkes Aluminiumblech ermöglicht trotz leichter Bauweise eine hohe Stabilität
• Geschwungene Linienführung des Rollers bietet neben einer angenehmen Fahrerposition auch sehr gute Balanceeigenschaften

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 9
Technischer AufbauMechanik

AT2go – Entwicklung, Fertigung und Inbetriebnahme eines selbstbalancierenden Rollers
Leuphana Universität LüneburgFakultät Wirtschaft
Institut für Produkt- und Prozessinnovation
Lüneburg 2013 Hans-Christian Otto Gerrit Mank Christian Stelter Simon Schmidt Seite: 10
Projektteam mit AT2go Rollervon links: Christian Stelter, Gerrit Mank, Hans-Christian Otto, Simon Schmidt