Embed Size (px)
Citation preview

Atmospheric Instrumentation M. D. Eastin
Measurement of VisibilityClouds and Lightning

Atmospheric Instrumentation M. D. Eastin
Outline
Measurement of Visibility, Clouds, and Lightning
• Visibility Sensors
• Cloud Height / Cover Sensors
• Lightning Sensors

Atmospheric Instrumentation M. D. Eastin
Definition and Concept:
Visual Range: Greatest distance at which an object can be seen and identified by anobserver with normal vision (20/20) under normal daylight conditions
Visual range is reduced by the scattering or attenuation of light bywater drops, ice crystals, aerosols, or any airborne particulatefollowing Beers Law:
where: E = irradiance of visible light (W m-2)E0 = irradiance at path beginning (W m-2)ξ = extinction coefficient (m-1)V = visual range (m)
If we account for the physiological response of the human eye to detecta minimal contrast between an object and its surroundings (E/E0 = 0.05)then the visual range can be easily calculated from any known response
function relating the extinction coefficient and to detected light
SI unit: meters
Meteorology: 1 mile = 1609 m
Instrument: Transmissometer
Visual Range
VeEE 0

Atmospheric Instrumentation M. D. Eastin
Transmissometer:
•An optical source / detector set at a fixedbaseline distance (usually 5m or 50 m)
•The source emits pulses of 1 μs durationat a repetition frequency of 1.5 Hz
•The fraction of light received by the detectoris proportional to the visual range (V) via
where: x = baseline distance (m)E = detected light intensity (W m-2)
E0 = light source intensity (W m-2)
•At most airports, the transmissometer is locatedalong a runway, so the measured parameter isoften called → Runway Visual Range (RVR)
Visibility Sensors
0ln
05.0ln
EExV

Atmospheric Instrumentation M. D. Eastin
Forward Scattering Visibility Meter:
•An infrared transmitter / receiver pair is set at a fixed offset angle (20°-50°) and distance (20-50 cm)
• Particles passing through the small samplingvolume (0.02-0.05 m3) will scatter light in alldirections, but the fraction detected by the receiver will be proportional to both particle
concentration and mean particle diametervia a non-linear transfer function for theextinction coefficient (found in calibration)
where: C = concentration (m-3)D = mean particle
diameter (m)
• A conservative visual range (V) is calculated from the total number of samples (N) using a harmonicmean (rather than the traditionalalgebraic mean)
Visibility Sensors
N
n nV
NV
1
1
2
2DC

Atmospheric Instrumentation M. D. Eastin
Definitions and Concepts:
Cloud Base: The altitude of each cloud layer (or at least the lowest cloud layer) is animportant parameter for aviation operations
Cloud Cover: The fraction (in octants or tenths) of the sky covered by a given cloud layerbelow 12000 feet is also an important aviation parameter:
Category WMO (non-USA) North America METAR CodeOvercast ** 10/10 8/8 OVC
Broken ** 6/10 to 9/10 5/8 to 7/8 BKNScattered 3/10 to 5/10 3/8 to 4/8 SCTFew 1/10 to 2/10 1/8 to 2/8 FEWClear 0/10 0/8 CLR
SI unit: meters (cloud base) ** Considered a cloud “ceiling”
Meteorology: 1 mile = 1.609 km1 mile = 1609 m1 mile = 5280 feet
Instrument: Ceilometer
Cloud Height / Cover

Atmospheric Instrumentation M. D. Eastin
Rotating Beam Ceilometer:
•A powerful narrow-beam light source is repeatedly rotated from nearly horizontal to vertical (and back)
•The detection of reflected light by a receiversome fixed baseline distance away (<100 m)is used to calculate the cloud base for any ceiling layer (OVC or BKN) as well as any non-ceiling layer (SCT and FEW) below an observed ceiling via:
where z = cloud height (m)x = baseline distance (m)θ = elevation angle (degrees)
•Was developed in the 1940s and is stillused is less developed nations andsmall airports across the U.S.
Cloud Sensors
Detector
LightSource
tanxz

Atmospheric Instrumentation M. D. Eastin
Laser Ceilometer:
•Pulses of laser light are transmitted vertically andreflect back from each cloud layer base
•The time required for an “echo” (reflected light) toreturn can be used to measure cloud base height
where: z = cloud base height (m)c = speed of light (m s-1)t = time (s) between pulse
transmission and return
•Pulse repetition frequencies are 200-500 Hz
•As the pulse travels it expands into a conical beam such that power reflected is proportional to z-2, and the received echo is proportional to z-4 → receiver
must be very sensitive
•The range limit (or maximum detectable elevation) is determined by the pulse repetition frequency
and receiver sensitivity
Cloud Sensors
2
tcz

Atmospheric Instrumentation M. D. Eastin
Laser Ceilometer:
• Each detected return echo is accumulated into bins(or range gates) based on total time since pulsetransmission (equivalent to height intervals)
• Range gates with strong return echoes denotedifferent cloud layers (height of each cloud base)
• The frequency of return echoes is used to differentiatebetween OVC, BKN, SCT, and FEW layers
• Intense precipitation can attenuate both the upwardbeam and downward echo → obscured cloud layers
•Primary instrument used in the United States
Typical Specifications:
Range 5.0 – 7.5 kmRange gates 400 – 500Resolution 15 – 25 mPulse Frequency 200 – 500 Hz
Beam Width 0.25 – 0.30 degrees
Cloud Sensors

Atmospheric Instrumentation M. D. Eastin
Definitions and Concepts:
Potential Gradient: Voltage difference between the surface and a point 1-m above thesurface that is at electrical equilibrium with the surrounding air
Measurement of the local vertical electrical field near the surface
The voltage differences arise from electric currents flowing awayfrom distant thunderstorms → larger differences increase the
likelihood for a cloud-to-groundlightning strikes
Lightning strikes (either cloud-to-ground or cloud-to cloud) rapidlydecrease the local potential gradient
SI units: Volts per meter (V m-1)
Meteorology: Volts per meter (V m-1)
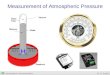
Instrument: Electrostatic Field Mill
Lightning

Atmospheric Instrumentation M. D. Eastin
Definitions and Concepts:
• In fair weather conditions and unpolluted airthe “background” potential gradient (PG) atthe surface is roughly +100 V m-1
• Short-term PG variability is linked to:
1. Charge on passing clouds2. Charge carried by precipitation3. Precipitation type
• The ground often has a positive charge• The lower and midlevels of thunderstorms
often have negative charge• Liquid precipitation has negative charge• Frozen precipitation has positive charge
•Nearby thunderstorm passage will enhancePG magnitude with rapid sign reversals (often ranging over ±500 W m-1)
•Beneath thunderstorms, the PG can exceed±10000 W m-1 before a lightning discharge
Lightning
Hour (LST)
fairweather
passingstorm

Atmospheric Instrumentation M. D. Eastin
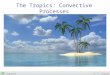
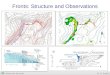
Spatial Variability:
• Most frequently observed in Florida, the coastal south, and the low-land interior wherethunderstorms related to sea-breeze convergence and mature fronts are frequently found
• Less frequent over mountains and the colder and/or drier climatic zones
Lightning

Atmospheric Instrumentation M. D. Eastin
Electrostatic Field Mill:
• A circular-veined plate electrode rotatesunder an outer mechanical shutter
•The background atmospheric electric field(the potential gradient) generates a
voltagedifference between the shutter and theelectrode as the veins alternate betweenbeing exposed and being concealed
•Very rapid time response (< 0.05 s)•Large dynamic range (±1000 W m-1)•Limited effective range (< 100 km)
Lightning Sensors

Atmospheric Instrumentation M. D. Eastin
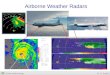
National Lightning Detection Network (NLDN):
•A network of radio-direction finding (RF) antennathat detect and locate cloud-to-ground lightningstrikes through triangulation of low-frequencymagnetic pulses generated by each lightningstroke → no electric fields or potentialgradients are measured
•A minimum of three RF antenna must detect eachlightning strike for its location and magnitudeto be accurately measured
•The NLDN has a tendency to underestimate totallightning strikes due to the triangulation criteria
•Rapid time response (< 30 s)•Much greater effective range (< 500 km)
•Owned and operated by Vaisala Inc.•Data is regularly purchased by “consumers” to
identify and nowcast intense lightning activityin nearby thunderstorms
Lightning Sensors

Atmospheric Instrumentation M. D. Eastin
Summary
Measurement of Visibility, Clouds, and Lightning
• Visibility Sensors
• Cloud Height / Cover Sensors
• Lightning Sensors

Atmospheric Instrumentation M. D. Eastin
References
Beasley, W. H., M. A. Uman, and P. Rustan, 1982: Electric fields preceding cloud-to-ground lightning flashes. Journal of Geophysical Research, 87, 4883–4902.
Bradley, J. T., R. Lewis, and J. Nilsen, 1991: Visibility measurements for the automated surface observing systems (ASOS). Preprints 7th Symposium on Meteorological Observations and Instrumentation, New Orleans, LA.
American Meteorological Society, pp. 344-347.
Brock, F. V., and S. J. Richardson, 2001: Meteorological Measurement Systems, Oxford University Press, 290 pp.
Harrison, R. G., 2015: Meteorological Instrumentation and Measurements, Wiley-Blackwell Publishing, 257 pp.
Horner, F., 1964: Radio noise from thunderstorms, Advances in Radio Research, 2, 121–204.
Orville, R. E., 1990: Lightning ground flash density in the contiguous United States. Monthly Weather Review, 119, 573–577.
Orville, R. E., R. W. Henderson, and R. B. Pyle, 1990: The National Lightning Detection Network—Severe storm observations. Preprints, 16th Conference on Severe Local Storms, Kananaskis Park, AB, Canada, J27–J30.
Streicher, J., C. Munkel, and H. Borchardt, 1993: Trial of a slant visual range measuring device. Journal of Atmospheric and Oceanic Technology, 10, 718-724.
Willett, J.C., E. P. Krider, and C. Leteinturier, 1998: Sub-microsecond field variations during the onset of first return strokes in cloud-to-ground lightning. Journal of Geophysical Research, 103, 9027–9034.
Uman, M. A., 1985: Lightning return stroke electric and magnetic fields. Journal of Geophysical Research , 90, 6121–6130.