Embed Size (px)
Citation preview
LA-6885-MSInformal Report UC-32GIC-74 REPORT COLLECTION
REPRODUCTION Issued: July 1977
copy
Automated Heuristic Stability Analysis for
Nonlinear Equations
L. D. CIoutman
L. W. Fullerton
t
).
J’Ialamos
scientific laboratoryof the university of California
LOS ALA MOS, NEW MEXICO 87545
An Affirmative Action /Equcrl Opportunity Employer
uNITED STATES
ENERGY RESEARCH AND DEVELOPMENT ADMINISTRATION
CONTRACT W-7405 -ENG. 36
PrintedintheUnitedStatesofAmerica.AvailablefromNationalTechnicalInformationService
U.S.DepartmentofCommerce5285PortRoyalRoadSprirrgtleld,VA 22161
Price:PrintedCopY $4.50Microfiche$3.00
Thi. rewrt w.. pmp.r.d . . . . .cc...1 .[ work .vons.mdb. the [,nimd St.te. (:o..rnmcnt. Xeilher the l!nited SIat.snor the t%iwd SI.trs Kncrm Rrsc.rch and Ik.vcl.pm.nt Ad.mi. i.tr.t i... nor ●n, .( !heir .IIIPI.Y.CS, nor ..} of their . . . .trm’tor.. Sublwntr”c’to,.. or :hoir ●mpl., ees. m.kes myw..rr.ml>..xp....0. ,mplicd... ..wIII.-...v 11-K.IIi.hil it. orrqwmihilitv (W th. xc. ra.t. .ompl.t.n.sh or u.efulnrs. of.nv inform. ti,, n. .IUU..l . . . product. or proce.. dkclo.rd. ortcpr.., ot. th.t il. .u- would not in frinae Privat.h ownedright.
AUTOMATED HEURISTIC STASILITY ANALYSIS
FOR NONLINEAR EQUATIONS
by
L. D. Cloutman and L. V. Fullerton
AESTRACT
_ 1=The modified equation method of heuristic stability anal-
-m” ysis has proved to be a useful tool for the prediction of in->~ a stabilities of nonlinear finite difference equations that are~sm:s0. -
-used in numerical fluid dynamics. The need to calculate and
:~gmanipulate multi–dimensional Taylor series expansions is a
~co:serious disadvantage of this technique, and for many problems
d-’ of interest, it ia difficult to obtain a reliable result by
Szo ~. hand. We have, therefore, written general purpose programs
-a~~ to do the algebra by computer, for both the series expansions
3=%qnd elimination of time derivatives from the truncation error
~~m\terms of the modified equation. We discuss some important
~~~features of the procedure and present examplea of how the
—! results may be used to design and improve difference methods.
I. lNTRODUCT1ON
‘deuriaticstability analysis (e.g., ‘dirtl)
consists of examining the lowest order truncation
errors of a finite difference equation (FDE). These
errors are obtained from Taylor series expansions,
sometimes multi-dimensional, of the solution of the
FDE about a suitably chosen point. Often simple
examination of the expansion can reveal undesirable
properties of the FDE, such as zeroth or negative
order errors and diffusional instabilities. In
principle, these expansions can also be used to help
design difference methods by eliminating inaccurate
or unstable forms before performing a series of
numerical tests. Heuristic analysis also has been
useful in predicting some of the stability require-
ments of nonlinear finite difference methods used
for numerical fluid dynamics calculations. In2
particular, Rivard et al. have recently used such
truncation error expansions (TEE’s) as the basis of
a technique to stabilize and improve the accuracy of
the ICE algorithm orginally described by Harlow and
Amsden.3 Warming and Hyett4 discuss a procedure for
analyzing linear problemg using a program written in
FORNAC, but they did not treat nonlinear equations.
The maasive amount of algebra involved in car–
rying out the expansions and time derivatives elim-
inations for many problems of interest ia a hin-
drance to applying the heuristic technique. Indeed,
even relatively simple FDE’s may be impractical to
analyze by hand, because one cannot be sure there
are no blunders in the derived result. We have,
therefore, implemented the heuristic technique in an
algebraic computer language, and this implementation
is discuaaed in the next section. In Sec. III, we
give several examples which illustrate how the
results of our program may be used.
II. METHODOLOGY
In order to illustrate the heuristic technique,
we first carry out an analysis of a typical FDE from
the field of numerical fiuid dynamica. The one-
dimenaional continuity equation in Cartesian coor-
dinates is
(1)
1

where p is the fluid density, u is the velocity,and
~ is an artificial mass diffusion coefficient that
may be needed for stability. For the ICE method,
we approximate Eq. (1) by
1+p:) U;* - (p: + P:_l) u;_%
we substitute Eq. (3) for each of the variables in
Eq. (2) and drop high-order terms, we obtain the
original differential equation plus extra terms that
we call truncation er~ors:
+
[‘> Ci-%+(pY+l - P;) - ei_%(P;
+
- P:_l)j ,
(2)
where a superscript denotea the time level and a
subscript denotes the mesh cell number. Figure 1
shows the kind of staggered grid used by ICE. The
time centering parameter .9assumes values between
zero and unity. We now choose a point, say time
level n and cell center i, about which to expand
the dependent variables. Next we calculate the
truncated Taylor series expansion
where y is either p
(h6t;+ k6x#Jmy , (3)
or u in our example. Because
we want truncation errors through ()(6t)and 0(6x2)
in the final result, we must, in this case, keep
terms inEq. (3) through 0(&t2) and 0(6x4). When
[
Fig. 1 Fragment of the computing mesh for thethermal diffusion example, Eq. (15). TheTi are defined on the cell centers ri, andthe ri_% are the cell edges. The same sub-scripting notation is used in the ICE dif-ference equations, where p is defined atxi=r i and u is defined on the cell edges.
%(d@-[$+2e(u&
1./
au ap + &s+p&—.at ax ax at
~24
[
4u&+6~&+3?&%
ax3 ax2 ~x2 ax
p#u-a4
a~ 83Q2C +-4axax3
ax3 ax
1
3&&_&% . (4)
ax2 ax2 3X3 ax
This result is called the modified equation. This
expansion procedure, we see, is simple, well defined
and very tedious. It is, therefore, ideally suited for
implementation in an algebraic language. We chose5,6to code the heuristic algorithm in ALTRAN, because
ALTRAN is designed for massive algebraic operations
on rational polynomial expressions. Moreover, it
contains a number of routines which manipulate trunca-
ted power series efficiently. The list of the expan-
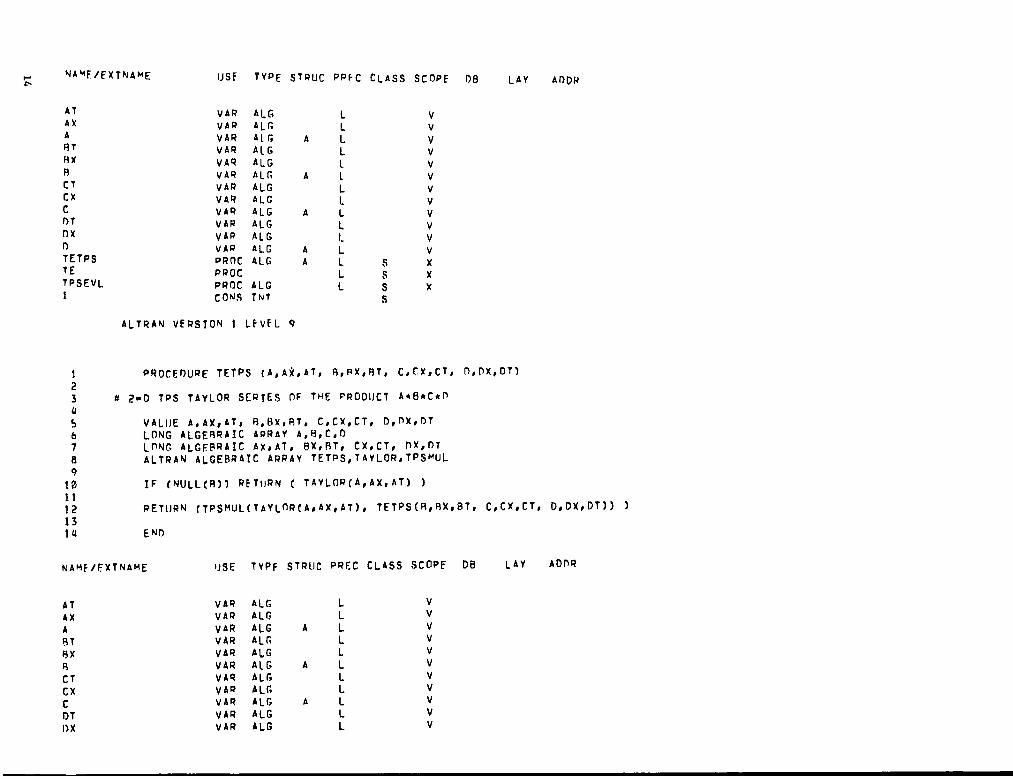
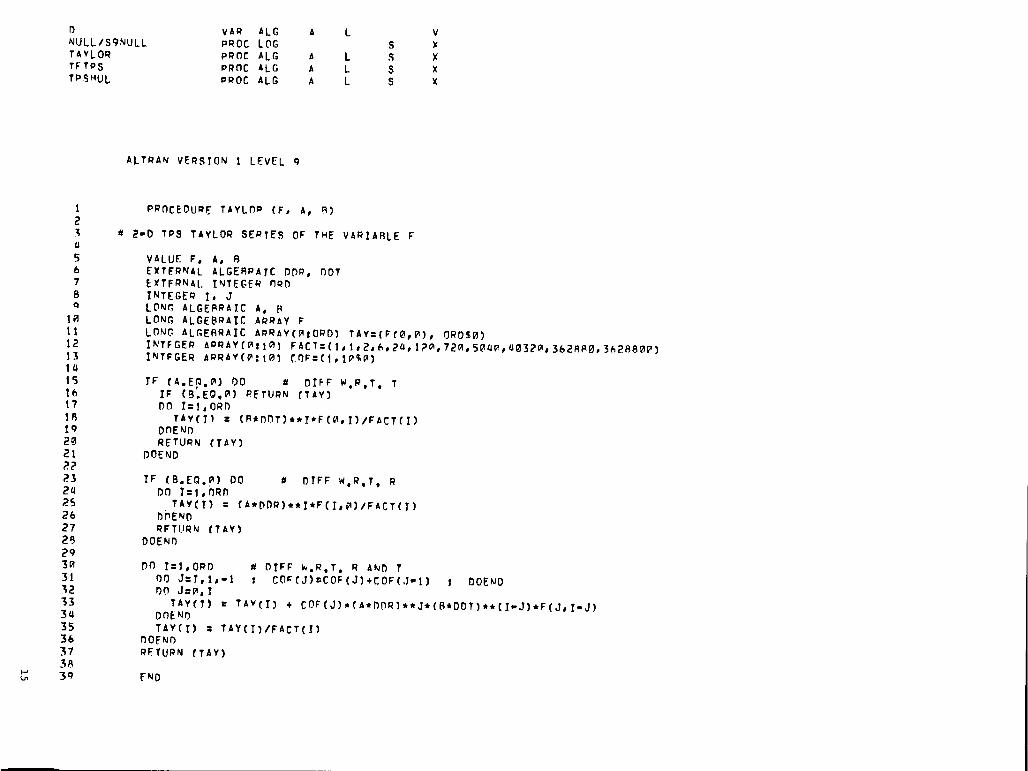
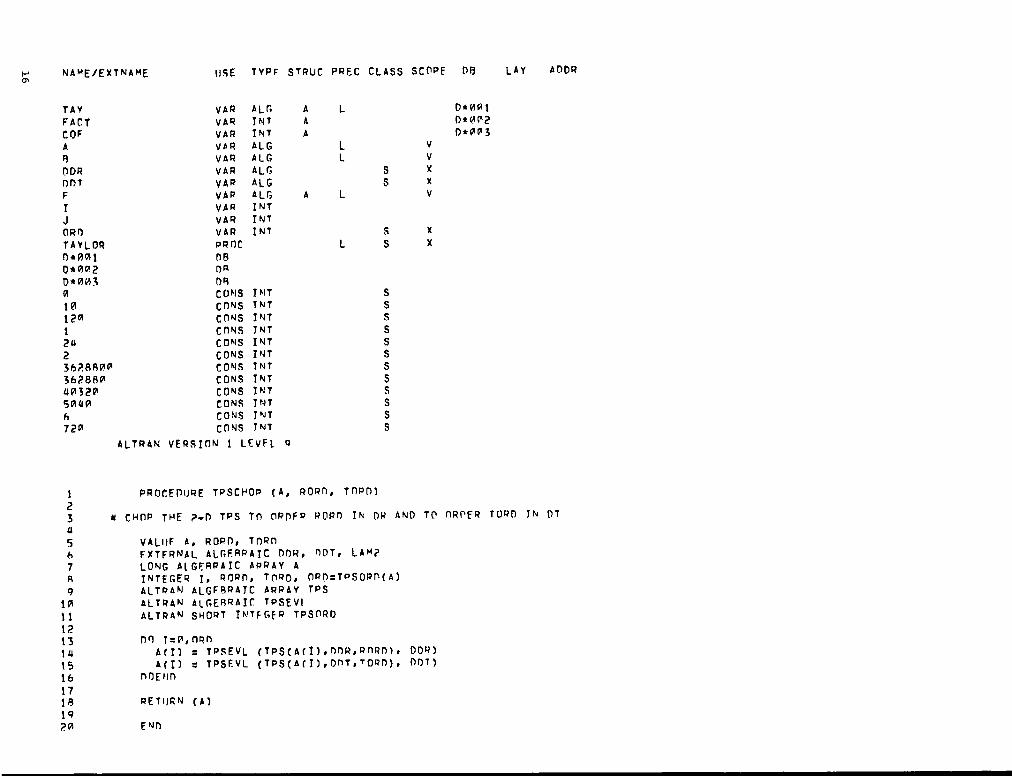
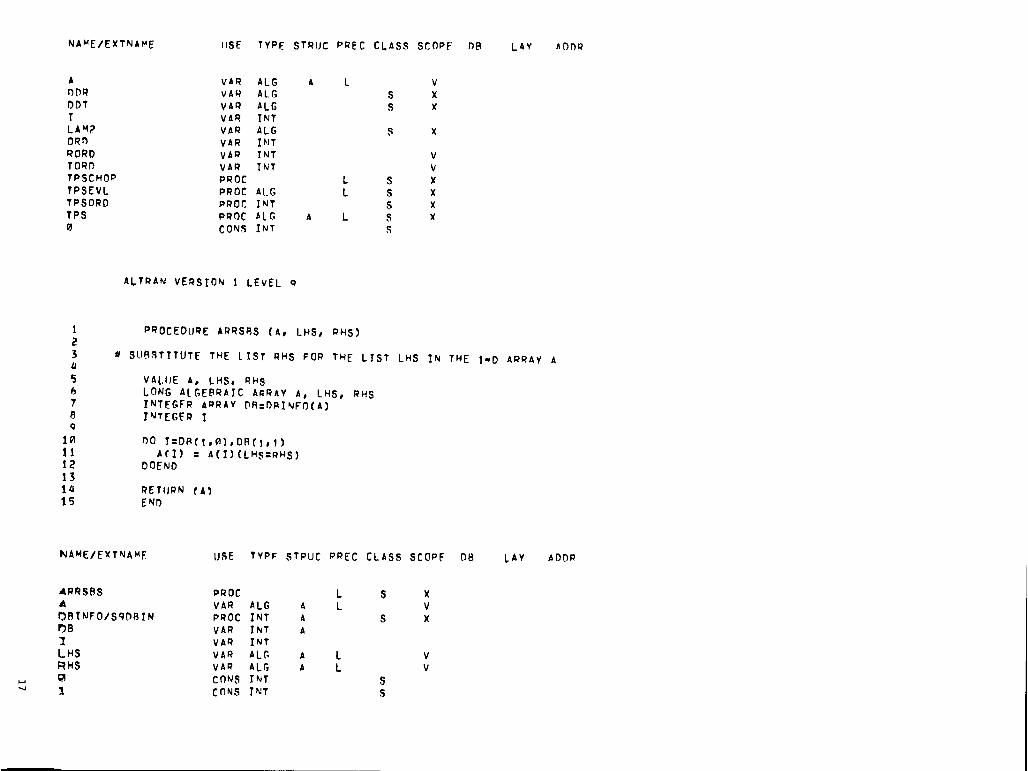
sion code is given in Appendix A. The algorithm
could be implemented in a number of other algebraic
languages including MACSYMA, REDUCE, and FORMAC,
provided they are available on a sufficiently large
computer.
The most important consideration in designing
this code waa to minimize the work space (i.e., core)
needed. Even though we use the LCM version of ALTRAN,
which has 131 000 words of workspace, the explosive
growth of intermediate terms can cause memorY
overflow even for fairly simple difference equations
unless care is taken to make the most efficient use
of the memory. Running time is usually no problem
on the CDC 7600 although the efficient use of memory
also tends to reduce run times.
The program uses indeterminant arrays to rep-
resentdependentvariables and their partial deriv-
(i+j) ~/axiatj is representedatives. For example, 3
by the array element U(I,J). The code is set up to
handle four such variables; P, T, RHO, and U. More
variables can be added to the layout if needed,
although they would increase memory requirements.
The maximum order of the expansions is set by the
integer variable ORD, currently set to a value of
six. The maximum value of I or J is set by the
integer variable N, also currently set equal to six.
If higher order derivatives or expansions are needed
st any point in the calculation, N and/or ORD must be
increased, with a corresponding increase in memory
requirements and running time. In practice, however,
even large, high-order problems are practical on the
l.ASL7600’s,
The Taylor series expansions are done by the
LONG ALGEBRAIC ALTRAN PROCEDURE TE, which is invoked
as a function. Suppose we choose (i &r, n fit)
as the point about which we want to perform the
expansions. A single call to TE csn expand a prod-
uct of up to four variables. The calling sequence
TE(fl,al, b f a b f a b f a b)expands1* 29 29 29 3* 3* 39 49 49 4
(fl)‘+bl (f2)n+b2 (f3)*+b3 (f4)n+b4 to order ORD ini-l-a
1i+a
2 i+a3
i+a4
both &r and &t. For example,n+l
is represented by‘i-%
TE(u,-1/2,1). It is more efficient to compute prod-
ucts with a single call than to make separate calls
and multiply the results. That is, usen+l nTE(RHO, O, 1, U, 1/2, O) for pi ui~, not
TE(RHO, O, 1)* TE(U, 1/2, O). The first method com-
putes only terms of order ORD. The latter method
expands each variable to order OW, and the mul-
tiplication generatee many terms through order 2*ORD
that are eventually discarded.
Since there is no simple way to specify the dif-
ference equation on data cards, all input data Is
specified in executable ALTRAN statements in a spe-
cial section of the program. RORD and TORD are the
maximum orders of &r and &t,respectively,to be
retained in the final result. DERMOD is the left-
hand side of the modified equation, and it will be
explained in more detail in the example. DE is the
differential equation, and FDE is the finite dif–
ference equation expressed in terms of ill?.lhe
listing of the code in Appendix A contains Eq.
(2) as an example. Note that DE and FDE are always
written in the fonu such that they are equal to zero.
we want the truncation errors to ~(6t) and 0(6r2),
so RORD = 2 and TORD = 1. Since the expansions are
divided by 6t and &2, they must be carried out to
at least order 2 and 4 in 6t and & respectively.
Therefore, ORD must be at least 4.
T%ia example is a trivial problem -- only 14
seconds of central processor time and 37 000 words
of workspace were required on a CDC 7600. Although
131 000 words of workspace are available in our
version of ALTRAN, memory space, not running time,
still Mmits the size of the largest problem that
can be run. Very large problems often can be run
piecemeal, however.
Appendix A consists of a complete listing of
the expansion code, plus a sample problem. Appendix
B contains a detailed flow chart of the ALTRAN cod-
ing, definition of all variables, and a description
of the purpose and operation of every procedure.
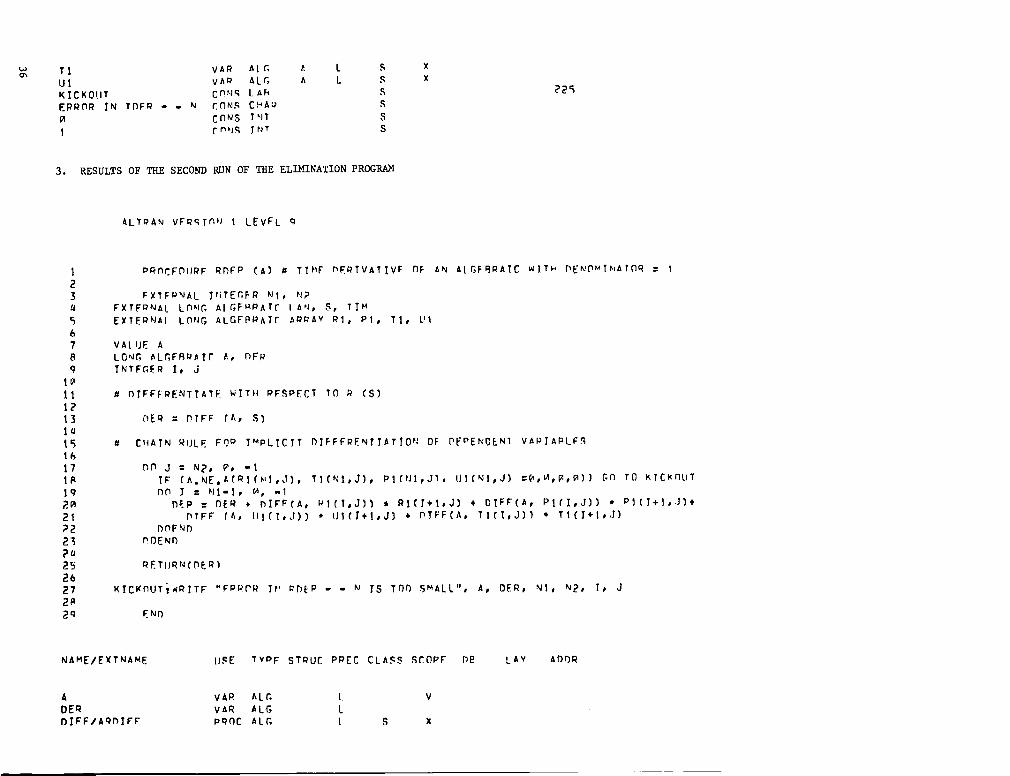
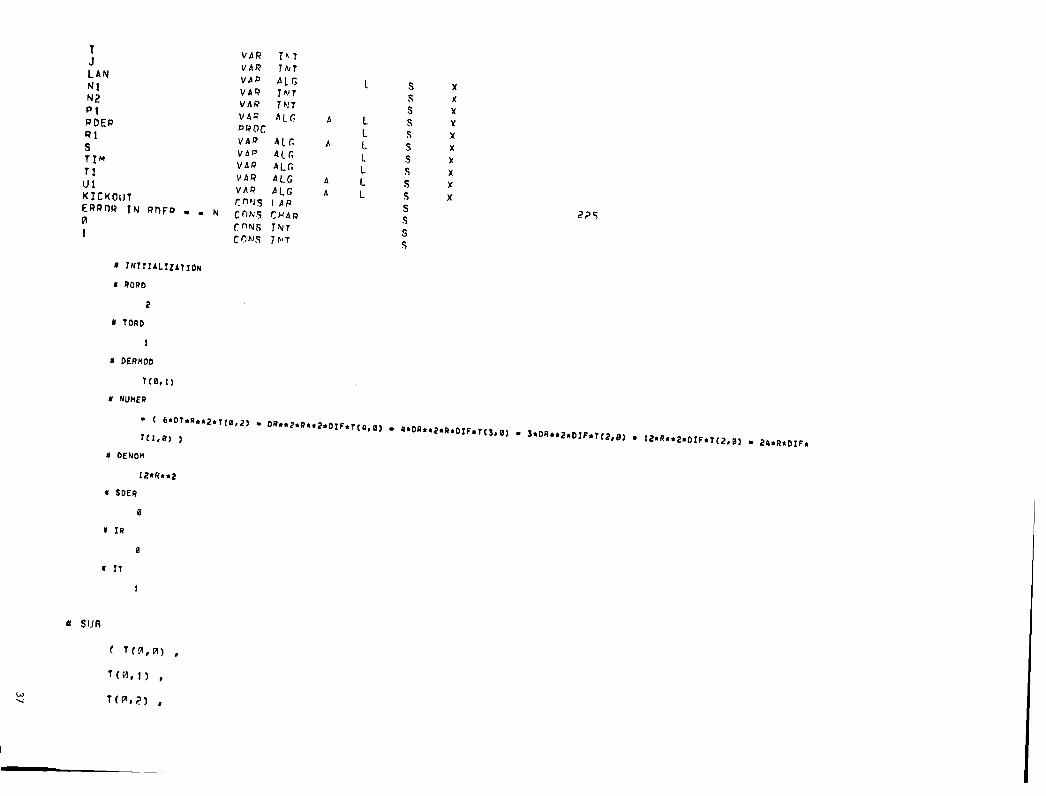
For some purpose it is necessary to eliminate
all time derivatives from the modified equation.
In our example, we need ap/2t and 2MIM and their
derivatives with respect to both r and t. Therefore,
the modified equation is punched out in the form
DERMOD= RHO(O,l) =~=–~- p%+ &ax
(5)
The time derivative elimination code then differen-
tiates the right-hand side and eliminates the time
derivative from the truncation error terms TER.
It is necessary to use the modified equation for the
momentum equation to eliminate the time derivatives
of u. We will return this example in the next sec-
tion.
A simpler example will suffice to illustrate
the complexities of automating the general procedure
for eliminating time derivatives. The modified
equation for the difference approximation,
n+1Ti - T; ~
&t “~(
FnnL-I-1)
- 2Ti + ‘i-1
to
aT .Kfi,Ft
ax2
(6)
(7)
3

expanded about time n and space point i is
aT2 2
6X2K a4T—=K~–~~+~ —at + o(6t2,6x4).
ax at ax4(8)
We will keep error terms of order 6t and 6X2. Begin
the elimination of a2T/M2 by differentiating Eq.
(8) wf,threspect to t,
fit Z13T+&.K 23T —— 6X2K a5T
at2 ax2at 2 at3 6 ax4at
Substitute Eq. (9) into Eq. (8) and discard
der terms:
g = ~ E12T 6tK 23T + dX2K 24Tat .
ax2 2 ax2at 6 ax4
Note
tive
iate
that we have lowered the order of time
in the error terms by one. Now we can
Eq. (8) with respect to x to obtain
a3T = K a4T dt a4T + 6X2K a6T
ax2at ax4 2 ax2at2 6~x6 ‘
which we substitute into Eq. (10):
w=K&+_
()
K6x2 1 K& a4T._—at
ax2 2 3 6X2~“
(9)
high-or-
(10)
deriva-
differen-
(11)
(12)
It is obvious from this trivial example that the
elimination of time derivativea from the truncation
error terms of the modifed equation is,in general,a
very messy algebraic problem for the general case of
coupled nonlinear partial differential equations.
The code and flow charta listed in Appendixes C and
D describe a first attempt to solve this problem.
Although this program is capable of handling very
large problems in a reasonable amount of central
processor time, a clever programmer should be able
to improve its efficiency. For this and other rea-
sons to be discussed later, this code should be
considered a useable but unpolished tool.
The elimination code reads its input from cards
punched either by itself or
elimination code only makes
4
the expansion
a single pass
code. The
at elim-
inating the time derivatives, lowering the order of
the time derivatives by at most one per run. Thus,
our simple example would require two runs. The
first run would read carde punched by the expansfon
code, and the next run (and all subsequent runs if
necessary) would read the cards punched by the expan-
sion code on the previous run. This multiple run
procedure is inefficient in terms of the human inter-
vention and turn around time involved, and we intend
to eventually combine the expansion and elimination
codes into a single completely automated code.
The elimination code can aleo handle simple
systems of equations. It can read a second modified
equation and substitute derivatives of the first, or
primary, modified equation into the second, or sec-
ondary, modified equation. Our limited experience
with systems of modified equations suggests that
improving the efficiency of workspace utilization
should receive high priority in the list of improve-
ments to this code. The memory problem is not se-
rious with the LCM version of ALTRAN available on
the CROS operating system, where 131 000 decimal
words of workspace are available, but it is likely
to be quite limiting at installations with smaller
workspaces. Some steps for reducing memory require-
ments and the mmber of runs are described in Appen-
dix C.
III. APPLICATIONS
Truncation error expansions may be employed in
three ways. First, they indicate the order and ac-
curacy of FDE’s, and so they may be used to help
choose the beat form for a particular problem. Sec-
ond, they may be used to find stability conditions
for some problems. And finally, they may be employed
as the basis of a new method for stabilizing some
finite difference algorithms. In this section we
discuss examples of each of these applications. We
emphasize that although most of our examples are
relatively simple and could be done by hand, the
ALTRAN programs are powerful tools that can do and
have done expansions much too large and complicated
to do reliably by hand in a reasonable amount of
time.
a. Comparison of Errors of Difference Equations
The TEE’s easily indicate some undesirable
properties of FDE’s, such as zeroth-or negative-

order errors. Such information is quite useful,
for it may rule out use of a particular FDE before
it is coded and subjected to numerical tests. But
beyond such simple observations, FDE’s are not easily
compared. The next example illustrates the type of
analysis frequently necessary to determine which one
of several FDE’s is more accurate. Consider the one-
dimensional diffusion problem in spherical coordinates
(13)
T(r,O) =* ,
T(n,t) = O ,
and
~ (O,t) = o ,
where $ is a constant. The analytic solution is
T(r,t) = exp(-$t) sin(r)/r . (14)
Now consider the explicit FDE
,p+l_ ,f
—-J=++!-_i
[
r2i+%(’;+l - ‘~)
&t r.-ri 1+1 1
r~_%(T~ - T~_l)
r. - r.1 1-1 1 (15)
The computing mesh is illustrated in Fig. 1. We
compare the accuracy of two different definitions of
Vi in Eq. (15):
Vi = (r~q+- r~_%)/3 (16a)
and
Vi ‘ r: (ri%- ‘i_~) . (16b)
Note that the cells are spherical shells, and Vi is
the volume of one steradian of the ith cell.
Heuristically we expect Eq. (16a) to be more
accurate than Eq. (16b) near the origin, because the
former volume elements exactly fill space. The lat-
ter volume elements are all smaller than the former
for the same set of mesh
most pronounced at small
give conservative FDE’s,
amOunts of the conserved
points, and the effect is
r. Both volume elements
but they conserve different
quantity. For constant T,
volume elements in Eq. (16a) lead to conservation of
the correct amount of the conserved quantity
fi1247
IT r2dr, but Eq. (16b) conserves the wrong
0
amount.
We can use the expansions to determine which
volume element is more accurate. The TEE’s for Eq.
(15) with Eqs. (16a) and (16b), respectively, are
equivalent to
-[+-+k$++l‘~ [$-4 ‘o(’t2’r4)
(17a)
and
1+ 4 213T +4 6r2 a2T— . + 0(rSt2,6r4) (17b)r &3 4 r2 2r2
for a uniform mesh.
At first glance, Eq. (17b) appears better than
Eq. (17a) because the coefficient of ~ in Eq. (17a)
is proportional to l/r3. Furthermore, unlike Eq.
(16a), Eq. (16b) leads to a difference scheme which
is exact for a solution T, linear in r. Thus, our
earlier arguments about volume elements in Eq. (16a)
being better appear to be wrong. However, as we
shall show, our superficial examination of Eqs. (17a)
and (17b) is at fault.
Currently, there is no general procedure for
5

choosing the more accurate of several FDE’s,based on
Taylor series expansions. But we now present a
procedure which works many problems, and we hope it
will provide a basis for an even more general proce-
dure. The cursory examination above is misleading,
because ~ = O at the origin and because some error
terms partially cancel each other. We expand T in
Taylor series about r = O for some II,O < ~ < r5,2,
andatimeT, tn<?< t’n+l”
(21a)‘N+l= ‘TN + 2Tb
or
1 8‘N+l = ‘2TN+~TN-l ‘~Tb’
(21b)
For boundary
respectively, th
where Tb = O is the boundary value.
conditions in Eqs. (21a) and (21b),
right side of Eq. (15) is equivalent to~ 21(i)T(0,T)~ .
T(rl,T) =i=o ar(i) i!
(18)
After differentiating Eq. (18) and substituting into
the space errors of Eqs. (17a) and (17b), we find(22a)
Each equation is valid for both volume elements in E
(16a) and (16b). Note that the simpler Eq. (21a) ha
a large zeroth-order in the diffusion term. Therefo
we expect the first-order boundary conditions in Eq.
(21b) to be more accurate in the outer part of the
mesh where the boundary treatment dominates the
accuracy of the solution.
1+O(rlo) (19a)
and
In order to substantiate our deductions based
[
& &T+4a3T+++12 ar4
r ar3 r ,% 1r=qon TEE’s, we numerically solved Eq. (15) using Sev-
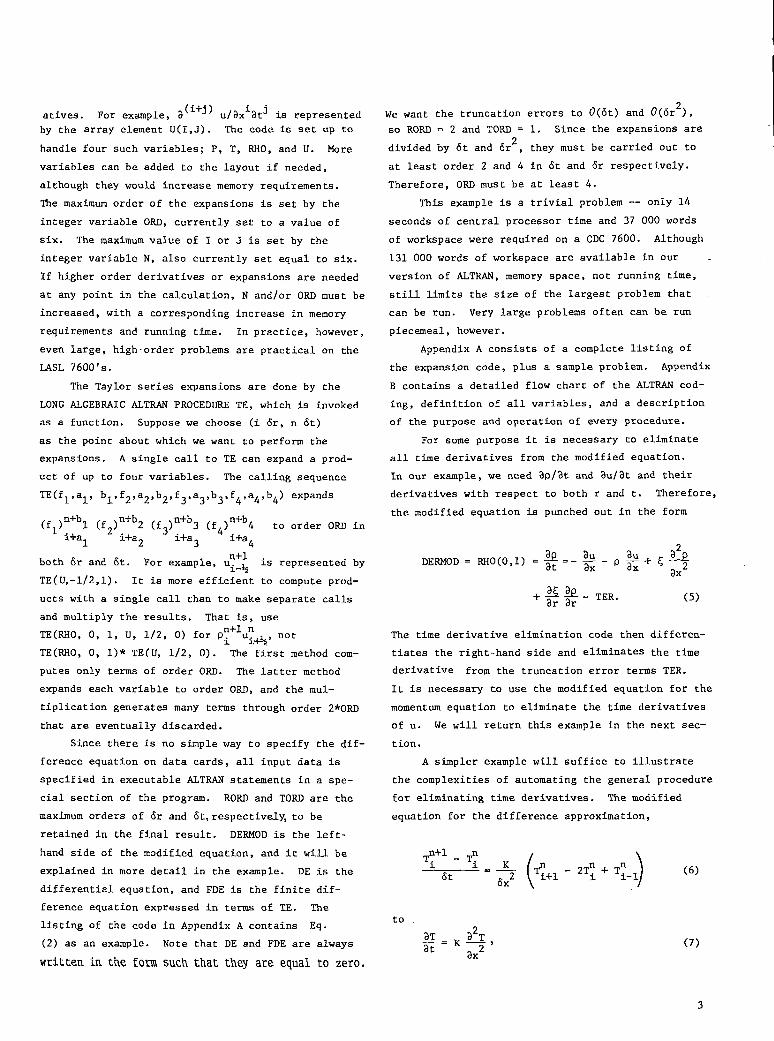
eral combinations of Eqs. (16) and (21). Figure 2
shows the relative errors as a function of r at time
t = 0.23687 for several of these calculations. We
[
_ @r2 3 32T(0, T) +
12 2~2 %2
~ a3T(0, ‘c)n ar3 see that ‘<hebest accuracy obtains from volume el-
ement in Eq. (16a) and boundary condition in Eq. (21
as predicted.
b. Truncation Error Cancellation Algorithms
The second application of TEE’s is important in
the field of ntonericalfluid dynamics. A number of
instabilities that arise in such calculations are
(19b)
Because v. ~ for most physical.
problems, the
others in Eqs.
to errors
l/TI’error in Eq. (19b) dominates all
(19), and so Eq. (16a) actually leadsdue to diffusional truncation errors with negative
diffusion coefficients. An obvious application of
TEE’s is to find stability conditions for numerical
algorithms that are subject to diffusion instabil-
ities. On a higher level, these expansions can be
used as the basis of new method
FDE’s as reported by Rivard et
smaller than Eq. (16b) near the origin.
The boundary conditions are imposed by
n+l Tn+l‘1=2
(20)
for stabilizing the
a12. Both of
a one-dimensional
and either
these uses are illustrated with
6
t= 0.23687+tlt— =0.4&2 /
I
2
t 23
,3 4
1 I I
u r _2
Fig. 2. Relative truncation errors vs. radius at afixed time for five soiutions to Eq. (15).Curves 1, 3 and 5 use volume elements (16a),and curves 2 and 4 use volume elements(16b). Curve 1 used boundary condition(21a). All others use boundary condition(21b). Curves 1, 2, and 3 were computedusing 10 cells, and curves 4 and 5 werecomputed with 20 cells.
3version of the ICE method that requires much
less artificial diffusion to obtain stability than
~nY other methods. Again, we emphasize that our
simple example is chosen for clarity of presenta-
tion, and the programa are useful for much more
complicated FDE’s.
We describe the truncation error cancellation
(TEc) technique in detail only for the continuity
equation (l), but the same procedure is applied to
the momentum and energy equationa, as well. It is
possible, however, to improve the algorithm by ap-
plying the procedure only to one or two of the equa-
tions. We use the FDE given by Eq. (2). The trunca-
tion error expansion is given in Eq. (4), but the
time derivatives must be converted to space deriva-
tives by using the continuity and momentum modified
equations. We obtain for the diffusional errors
where c is the diffusion coefficient of the trunca-
tion errors and c is the local sound speed. We
have neglected the 32</3x2 term in Eq. (4); aa we
shall see. it ia a higher order term in the TEC
algorithm. If ~ = O in Eq. (l), the FDE is unstable
whenever c < 0. In the original version of ICE, a
constant global artificial mass diffusion coeffi-
cient < > 0 is used to stabilize the algorithm. It
is necessary to choose E,large enough that ~ + L>O
for all cells at every time step, and so a large
amount of global diffusion is needed to stabilize
many problems. Because the diffusion term is explic-
it, a necessary condition for stability is
C6C<+6X2 . (24)
Artificial viscosity plays a similar role in the
momentum equation and imposes a separate require-
ment analogous tO Eq.(24). A-l-thoughthese artifi-
cial diffusion parameters stabilize the algorithm,
they decrease the accuracy of the solution and
introduce time step limits that can be so small as
to preclude the solution of some problems.
me basic idea of the TEC algorithm is to re-
place the artificial diffusion parameter with a
variable C(x,t) which is chosen so that it locally
cancels the destabilizing effects of diffusion
truncation errors. Consequently, much less diffusion
is needed for stability (often several orders of
magnitude less in parts of the mesh), and ao ac–
curacy is improved and diffusional time step limits
are relaxed.
The first step in deriving a TEC scheme is to
evaluate algebraically the diffusion coefficient C.
Expansion
>+at
yields a result of the form
(25)
(23)
The algorithm for carrying out the expansion gives
~ but we convert itthe nonconservative form C ax2 ‘to the conservation form in the right-hand side
of Eq. (25). In some cases, usually in the momemtum
~ will contribut‘quation’ ax e additional d~ffusional
7
errors that should be included in TEC as discussed
by Rivard et al. In our continuity equation,
~ doea not produce additional diffusional‘owever’ axerrors, and the
~~ax ax truncation error ia neglected.
In order to obtain an improved FDE, Eq. (23) is
difference to yield
[ci_%= (2e-1)$ (u;_%)2++(C2+C 1;_l)
Next we choose
(26)
which is then incorporated in the finite difference
form of Eq. (l). The constant f3,O < ~ < 1, is a
free parameter that determines the degree to which
the dlffusional truncation errors are cancelled. If
@ is too small, the l?DE’swill have so little diffu-
sion that dispersively generated ripples destroy
accuracy, If, on the other hand, B is too large,
unnecessary artifical diffusion reduces the accuracy
of the solution. The optimum value of 6 is problem
dependent and must be found by trial and error. In
practice, f3= 1 is frequently an adequate value.
Although the derivation of the diffusion errors
for the TEC schane requires extra work, the modified
FDE’s yield substantially better solutions, TEC has
been installed in several programs, and the scheme
worka well except in problems with very strong shocks
where higher order errors are significant. We now
briefly compare several TEC and non-TEC solutions in
order to show the advantage that may be expected
from using TEC.
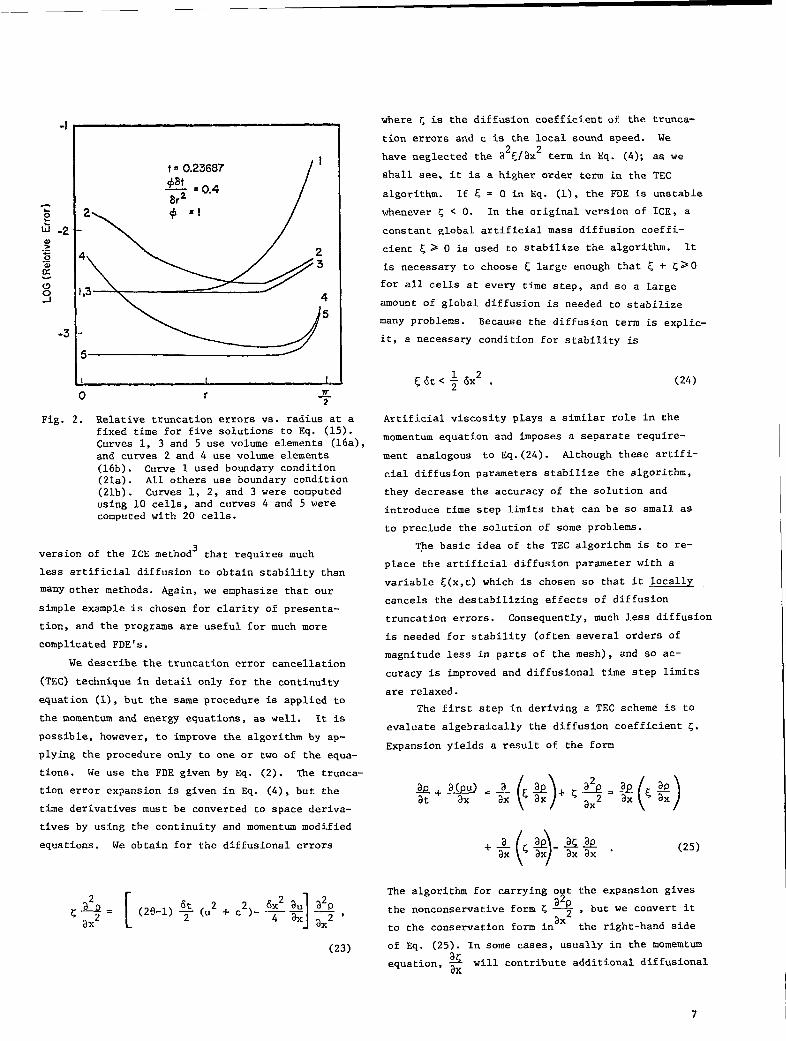
Consider Fig. 3, which shows the run of density
for three one-dimensional shock tube calculations,
as well as the analytic solution.
tion is a 5:1
All solutions
8
pressure and density
coincide at the left
The initial condi-
jump at cell 90.
and right bound-
aries; the solutiona have been displaced vertically
for clarity. The bottom curve Is the analytic solu-
tion. ‘he top solution is an artificial viscosity
solution with nearly the minimum diffusion needed
for stability. The right density jump is a shock
wave, and the left discontinuity is a contact sur-
face. Both discontinuitiesmove to the right. The
shock is smooth, but the contact surface has disper-
sively driven ripples behind it. TEC.with the same
viscosity u as the conventional method,was used in the
second solution from the top. The shock is unchanged,
but the ripples behind the contact surface are atron-
ly damped. The third numerical solution is also TEC
run, but the viscosity is reduced by a factor of ten.
The shock is significant sharper, but it shows a
little overshoot. The first peak behind the contact
surface is as high as in the artificial viscosity run,
but the damping behind the contact is much stronger.
The artificial viscosity scheme is unstable with this
little viscosity.
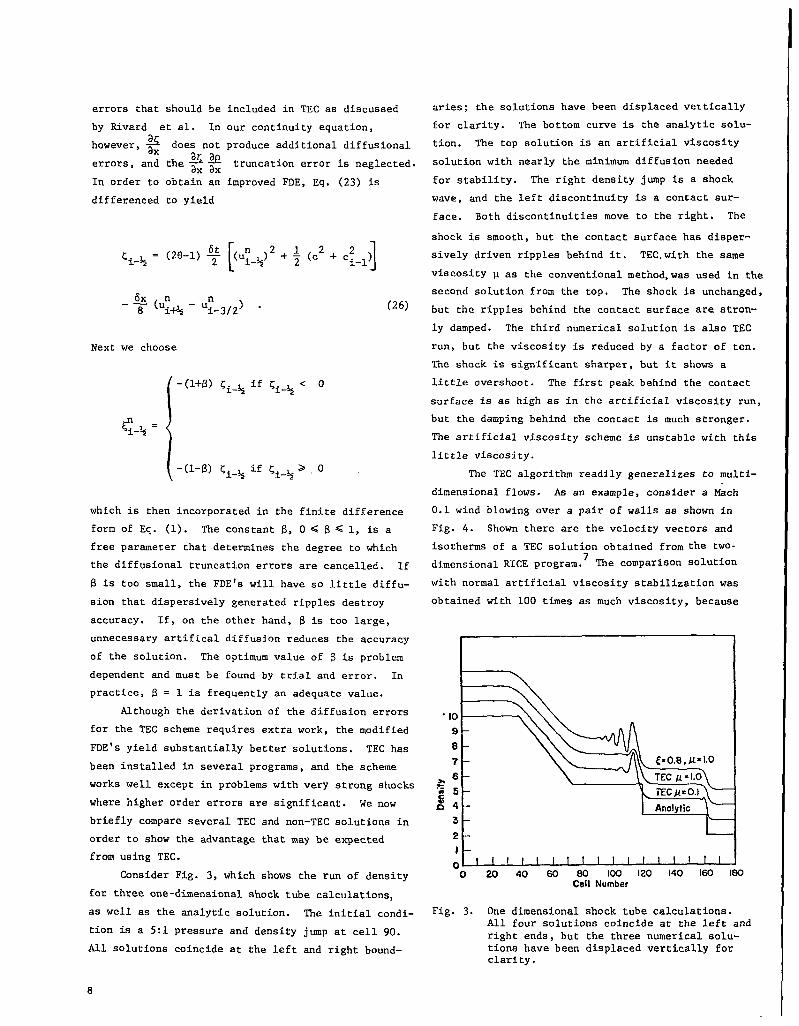
The TEC algorithm readily generalizes to multi-
dimensional flows. As an example, consider a Mach
0.1 wind blowing over a pair of walls as shown in
Fig. 4. Shown there are the velocity vectors and
isotherms of a TEC solution obtained from the two-
dimensionalRICE program.’ The comparison solution
with normal artificial viscosity stabilization was
obtained with 100 times as much viscosity, because
“10
9 –
8 -
C=O.8*w= I.o
TEC I,L* 1.0%-ms TEc/.4=o.lE4 - Analytic
3 -
2 r
I
0 I I I I [ I I I I 1 I I I I I I I I
0 20 40 60 00 Im 120 140 160 180Cell Number
Fig. 3. One dimensional shock tube calculations.All four solutions coincide at the left andright ends, but the three numerical solu-tions have been displaced vertically forclarity.
the conventional method was unstable with leas
viscosity. The two velocity solutions are similar,
although the TEC solution shows more shear in the
vortex, and the weak Helmholtz instability in the
upper right quadrant is somewhat stronger, an indica-
tion that viscous forces are relatively small in this
problem. The isotherms, however, are much different.
The TEC.solution shows steeper gradients across ‘the
vortex, because there is less diffusion and less
viscous heating in the energy equation.
Experience indicates that TEC is quite general
in its range of applicability and that it provides
significant improvement in the accuracy of numerical
fluid dynamics calculations. The use of ALTRAN to
compute the TEE’s is proving to be extremely helpful.
Iv. suMMARY
We have shown that the Taylor series expansions
needed for Hirt’s heuristic stability analysis can
be easily generated by a program written in a comput-
SpecificInternal Energy
[“
~[
&y\/J
\ArlificidViscosity Trunco\ionError Concellatian
Velocity
ArtificialViscosity TruncationErrorCancellation
Fig. 4. A two-dimensional flow with and withoutTEC. The TEC run has 1% as much viscosityaa the artificial viscosity run. A Mach0.1 wind enters the mesh across the upperhalf of the leftacross the upperary.
boundary, and it lea&half of the right bound-
er algebraic language such as ALTRAN. The truncation
error expansions have proved quite useful in choos-
ing optimum finite difference equations, in deriving
some necessary conditions for stability, and assist-
ing in the design of truncation error cancellation
algorithms. The ability to derive the truncation
errors automatically is essential for all but the
simplest difference equations. The extension of
these codes to include more dimensions is straight–
forward, and present computers are adequate to
handle many problems of interest. We expect the
use of such algebraic computations to increase and
become a much more important part of numerical
analysis as algebraic systems become more common on
large computers and as potential users become fsmil-
iar with the language and come to appreciate the
potential of algebraic systems for accurately and
quickly solving masaive problems.
REFERENCES
1.
2.
3.
4.
5.
6,
7.
C. W. Hirt, “Heuristic Stability Theory forFinite Difference Equations,” J. Comput. Phys.~, 339 (1968).
W. C. Rivard, O. A. Farmer, T. D. Butler, andP. J. O’Rourke, “A Method for Increased Accur-acy in Eulerian Fluid Dynamics Calculations,”Los Alamos Scientific Laboratory report LA-5426-MS (October 1973).
F. H. Harlow and A. A. Amsden, “A NumericalFluid Dynamics Calculation Method for AllFlow Speeds,” J. Comput. Phys. ~, 197 (1971).
R. F. Warming and B. J. Hyett,’’TheModifiedEquation Approach to the Stability and AccuracyAnalysis of Finite-Difference Methods,” J.Comput. Phys. ~, 159 (1974).
A. D. Hall, Comm. Assoc. Computing Mach. ~,517 (1971).
.- .W. S. Brown, “~TF&li Users Manual, 3rd cd.,”Beli Laboratories, Murray Hill, N. J. (1973). -..
W. ~. Rivard, O. A. Farmer, and T. D. Butler,“RICE: A Computer Program for MulticomponentChemically Reactive Flows at All Speeds,” LosAlamos Scientific Laboratory report LA-5812(March 1975).
I
I
9
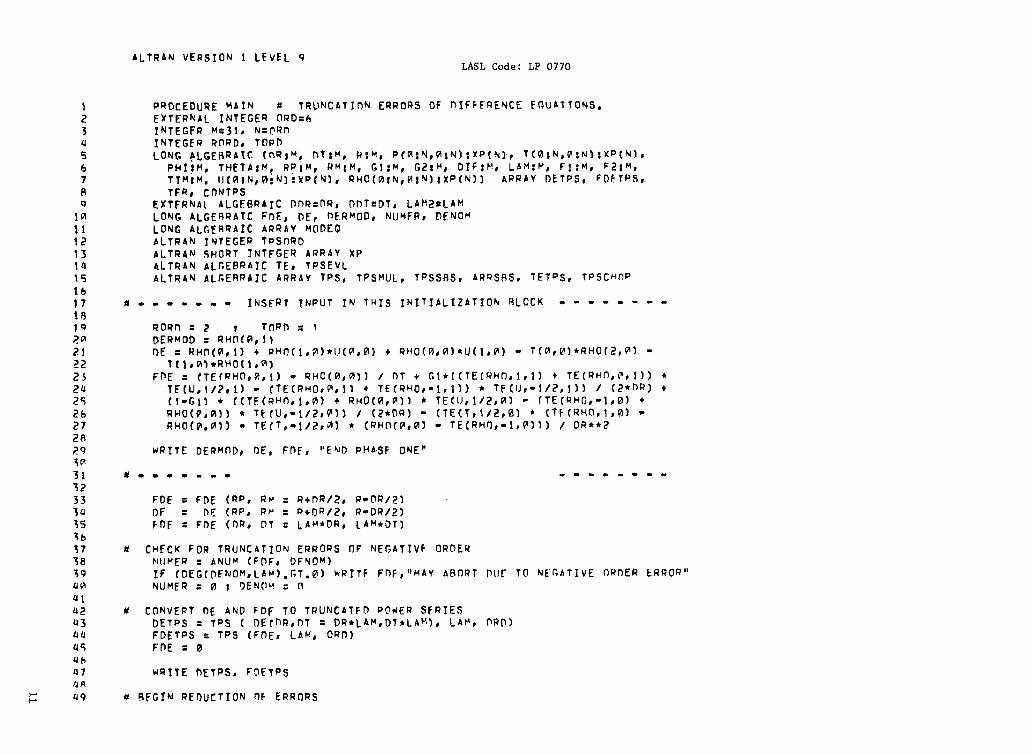
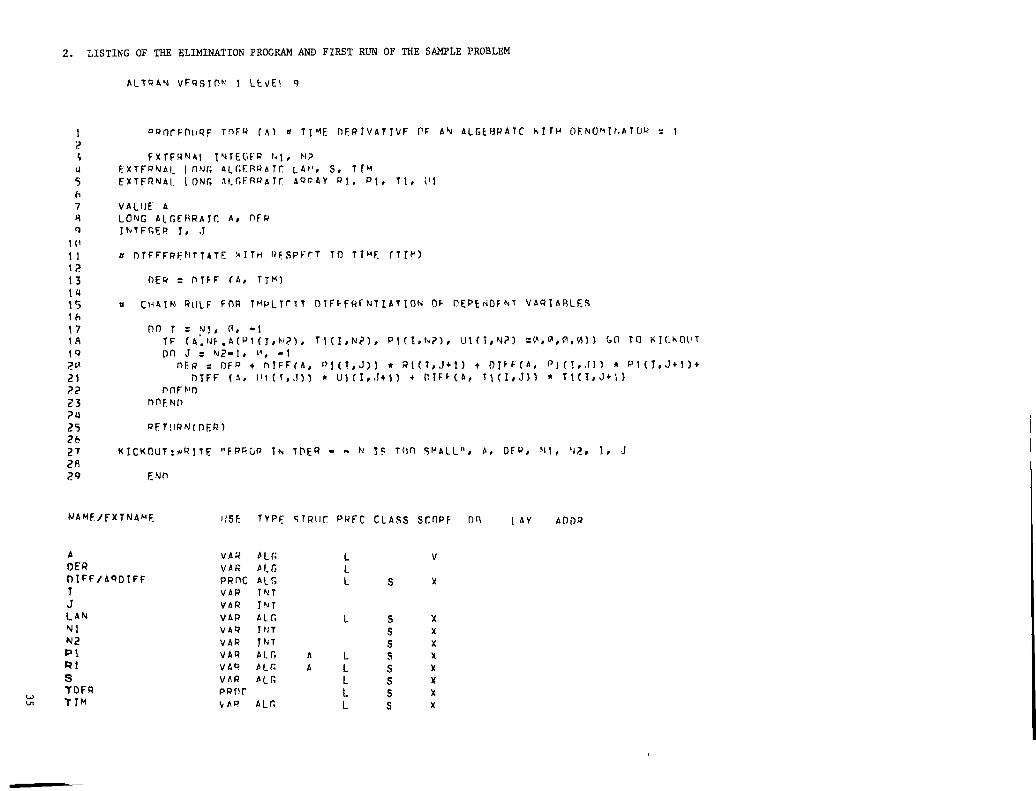
APPENDIX A
THE EXPANSION CODE LISTING
fiis appendix gives instructions for running
the code that computes the Taylor series expansions,
a listing of the code, and a sample problem. This
particular problem was run on a CDC 7600 under the
CROS opersting system using the LCM version of
ALTRAN.
Lines 19 through 27 provide the input for this
run. RORD and TORD are the maximum orders of the
expansions in & (denoted by DR) and fit(denoted by
DT),respectively. This run expands the difference
equation (2) for the differential equation (1) using
the subscript notation for derivatives and the expan-
sion PROCEDURE TE described in the text. DERMOD iS
the time derivative we want to eliminate usin~ the
second code, and it Is not limited to a first deriv-
ative in time. For example, DERMOD=RHO(1,2) would
be appropriate for Pxtt = AP + BPXX. DE is the dif-
ferential equation, where we have represented ~ by T
in this run. Note that we have shifted the term on
the right-hand side of equation (1) over to the left-
hand side so DE = O. This must always be done for
both DE and the finite difference equation FDE. In
FDE we have represented 9 by G1. Note that we have
not followed our own advice in the text concerning
the efficient use of TE. This problem is small
enough to easily run on the LA$L LCM version of
ALTRAN, but we would have to be more careful with
memory utilization with the SCM version or with lar–
ger problems. It may be necessary to break large
problems into pieces and run them separately. For
example, the diffusion term could be deleted from DE
and FDE and then computed by itself on a second run.
Most of the output is intermediate results that
are sometimes useful if the run terminates abnormally,
The final results are printed after the message
“CONSTRUCT THE MODIFIED EQUATIONS.” The modified
equation is given by DERMOD = NDMER/DENOM, and the
output beginning with RORD is punched from logical
unit 25 by the computer aa input for the time deriv-
ative elimination code.
In lines 38 and 39, the code checks for the-1possible existence of errors of order 6r andlor
&-l and prints a warning message if appropriate.
Some difference equations, such as equations (15)
and (16a), will trigger a fictitious warning. How-
ever, the truncated power series package cannot han-
10
dle an error of negative order, and the code will
terminate abnormally after the warning message is
printed. One example is the Lax method for the diffu-
sion equation:
DE=fl_D&at
ax2
= T(0,1)-DIF*T(2,0)
and
(Al.)
n+lFDE = [Ti - (T;+l+T;-1)/2]/6t
- DIT;+l - 2Tin + Ti_ln]/6X2 (A2)
= (TE(T,O,l) - (TE(T,l,O) +TE(T,-l,o))/2)/DT
-DIF*(TE(T,l,O)-2*T(0,0)+ TE(T,-l,o))/DR**2
Lines 33 and 34 contain a possible trap for the
unwary user. The use of relations such as RP = R+DR/2
for equations such as Eq. (16a) can simplify the input
phase. The user may find other useful substitutions,
and these were left in the code as examples of sub-
stitutions that we found useful in our test runs.
These statements must be removed or replaced before
RM and RP can be used for another purpose. ‘A similar
situation exists for line 55, where F1 and F2 are
used as ratios of widths of adjacent cells for cases
where 6r is not constant. That is, FDE may be a (at
most) four-point difference scheme over three cells
of widths DR, F1*DR, and F2*DR, with the order being
chosen by the user.
*+
..
--r.
Zrx
-.t-
nnl.uXkn
..
1A
(A$vw)
at-
-6.N0xa●s.s1-8s.
.(nz0
.-..
2=.
..
..
a
E-n-I&+
Zbu
--
-cSS..-.
>
.t-+n.
w+
\l----..
#-
-k*---15
-3.
..-m
a”
Cu.
-s.t
X+.
tu.
xN
-AC
-*>-X
U-
-W9--
.)-=--2”
UJ
u-.~+
*.iLlt-
cac.L&
xX
Oez
-lidIIG
Nz.
.cu-
0v)a0auw
..--x6X
-.“#..
Hcz-
Ztuzaa
-1*u..
nzz
..
.
.wza
zcc.
u.
nx>
u.
k4xx.
~*s..II
-
acw
CGu
-cfriu
zc
cl
c>.-
IL)(LW
*a.
+>
--Lx
U(X
o-u
18
WI
ucalxu4.cz0uo-U2uCY
zu0k.m
t-1-C
0t-U
J>G
aII
LAlz
Zc)
9-W
.4
k--X
Zw
luII
U.lz
adD-a
QZ
IL,uacs
UklluG
+t-axz
nuJ-
c....
Zs
Crxfilb
Laa
-I-uzD
-W
um
ua
D-o
-$&l&
-x-x
o+m
aw
wlrw
au+cic
Ww
zz-1
0C9
-(C-I
J4aazzz
zz’
I--V)
lu6a
x-I-I-=
2c
..Ux
x
A.
z09-I
-1
II
b-
.ax
8Itat
11
.n
c
a-IA
10>a
-
-)
xuzua
-JLLIr
.+.
l-
.-)-
-z
--X-*-lJ
..<-u-lN
nxh.++..Ll
--C
7Z
k.-.J
lz>W
.ut-
(nV
.=an
t-l-.
w-cc
Ca
iLcn!-
-R.z*C
Lou
ml
U-J
.U
m(o
Czo
.n
Xx
xxx
.x-1-1n
-xc
-lCr
.0
U)m
:.idcc
Cn
LLl--Id
.c=m
.W
,
:I&
cacxuOY
n.
)-11
W.
ao-
ldc
-lE>&u.
:>:aI-G-x
i-
trmnoouoac.
oc
cnoaaonaeon
~~
afr~aa-cru
a.azzz6zzzzzzzzzazzzz
zzaaaaa-ee-x
>>-
UU
>-I-U
-0-+
0-.-9
-9+>s+
--$8-D-fnafi
>>&
>>>
>
vU
3cn
nn
D-t-
Innt-6
?-t-iu
wIlc
cLAu.
(0ClllLu
b-l-
2b.
IIII
(nc
can
LL
ccIA.
IL
h.1t-
0zu
Z(X
Wcu
mV
b-x
v
ux-az
12
..“c.
*c.
xc.
c
.+0
.xc
1.u
.t-V.
x~
.u
b-
Z/2-.
x
%X
nxxmm
2-I
.)-m.
xm.
m
..
c-U
JrnvlL
..
l-xUti.
Xn-w
u-o
-a.
.uIzo-U
..LA
JM
x+
..m
-l+-l>>(r
.-xii.
.>tia
tnX
u-tx
a.
Irff..7)-
.rxx
m<auu
w.
.Uuua
l-b-+-a
m.a
--xm
a.&
lzww
Xc
ffimc
Uw
w-ld
.uL--I-t
-I-I-Ja
<zz
.?-5.
.k-
xm.
02--l
--a.*6
-1w>
.x-id)-“=”u(nE
t-1><t-GA
l
z0
u!
<a
3ciulYtx_lzz
)-t-40
CJ-I
>_J-t--
za
x
)-0.E.n
tY:*
.1-
0.
)-0.
xc.
C2.
I-v.
xu.
u
.t-U
’.xu.
02.
+4.
*X4.
uv,n.
$-Ld)-Wm!2U.1
G:a
xv.v
mn
-1
z?.WY
anc+
..0
!+C
u-l.>
x-l
u)-
>>
>>
>>
>>
>>
>>X
xx
>>
>>
>>
>>
>>
>
+e.
x6.
<
m
WIna-1u
L1-
V,
v.u
)v.
.+a.
xQ.-i
..
xc
-wU
.+a
.Ulc
+U
.-b.lm
%+
=c-1><)-2lx=1-.Lz.tr-12z
<u<
u<
.-m
F-Q
>(r
.<.>
t-tkx-z-cm
ma
.-x
-Q%
X-Q(J
..L
JV
Qt-u
-a6465
-a-a
uX
trffiwl
-1ldLd
-1.(30<
-1-i-l**2?Id=W
lu:d
zzk-U
cc
d>-l-la
*a
-l
u
VI
ao-
01N
LL.
14
-.K
n6
an
lO
*.
-(5-n
6-.
.w=
-m
k.-.CII
.->ru
6a
.&I--&
.----c
2---
trllu0
+1
8-(J
U.
ILu
uc-ii-u
>>
z6<--
>%
XXX
Cn
wto
Ln
Cr
cc:
Q
.t-.a
*7
-1-I
A-l
o-
nc
.
:?2cC
7U
C.
u.u-
U’
+.IA
u>2
>w3t
-a
Vu
uu
aocco
-zaafya
>nnna
>-z
+-
0n—>
cl)<
-trl-6.
C-
w
IIzo
11
0.It
v.aw>
.c?L
&l
.1
:u
nzEe
mL--
Go
cczaab-
IAu
15
-NW
SEESSci*U
*0C
C2
>>
XX
>XX
a-z-l
Q
0’
Cnw
tnlnlnmlc
co
wU
.o?u?
txam
czaafk
rxa
aa
=
-1
ZzzzzzzzZzzz
-Ia-t-a
-Iu-xaa
ae
fxma
rrac
cc
oo
oo
oo
oc
->>>>>>>>>>
>Qc
cnuuuuu
uuuouuo
z
c
Qu.cQGct-(#)n*cItid11-
ncxu
I-11
Gc.
(nc
an
c+
occ
cW
U.u
ce
ua=LA
.c
luatrfx
-J+’zo
-)-b-l-
UX
oz-1-l-l
>W-lu
u-la
..
fxo-
0C2
Oc.
.z)-C
cc
o..
--u..-aQ
.-rom
aa
+1-
.-
-1-1>>W
u!u.
Wa
mc
++
:II
1)“*zu=l-cW
zm
w
16
>u-1>aA
al
ca
)c
>Xxx
>>
XXXX
X>x
>>
-1wmxfx
vuan
-J-i-l
_l.mx-
J*
u=a1-ln
.mx-1-c
<IL
z>$
-
::C
nlx
uXam
txcv
-x
--l-t-x
(n-x-a.
II-
cc,
-x
ad
e-..-.*6
-.<
--M
an-18
H0
u-z
<u
00
(20
0“r,
.uk
Lo
z0.VI
au>
xmc
2u
17
02.+
asa>-xA
u.z
.L
t%IJIn
>X
(n(cV
.in
+cc
mQdu
-J
A!
xu.
..
u“z
Li>
,s..z
r-
-I
{M
mmIv
z.
Z&-z
.Ilac
S9X
ZII
iuwn
-10c
Zifi
00
nc
nx
,4
.u
,,:1
zIT
r1.4:ic
L>;
x
18

.+
*.
+
+
19
.
●
.3●
+
●
Gu’
--
20
+
.a...0.mz.N
+
+.+
.
21
.
+
+.02..8
D
8
*.5’I-
.
8.6
.a.m
w
22
.
+
0z.+*+
.
,-0::..2.
+
.
23
a
..a:
.
+
.+
+
a“+...+a-
.-+
.w,-az:
Inn.
.zc1v.
U:a.
24
zQnLIY***
v)u.t-ul
ua)-ln
-1uua6
ac
cJ
cil*
.O?--N
U.
N6
In.-
3=3
Wl
u-.
25
APPENDIX B
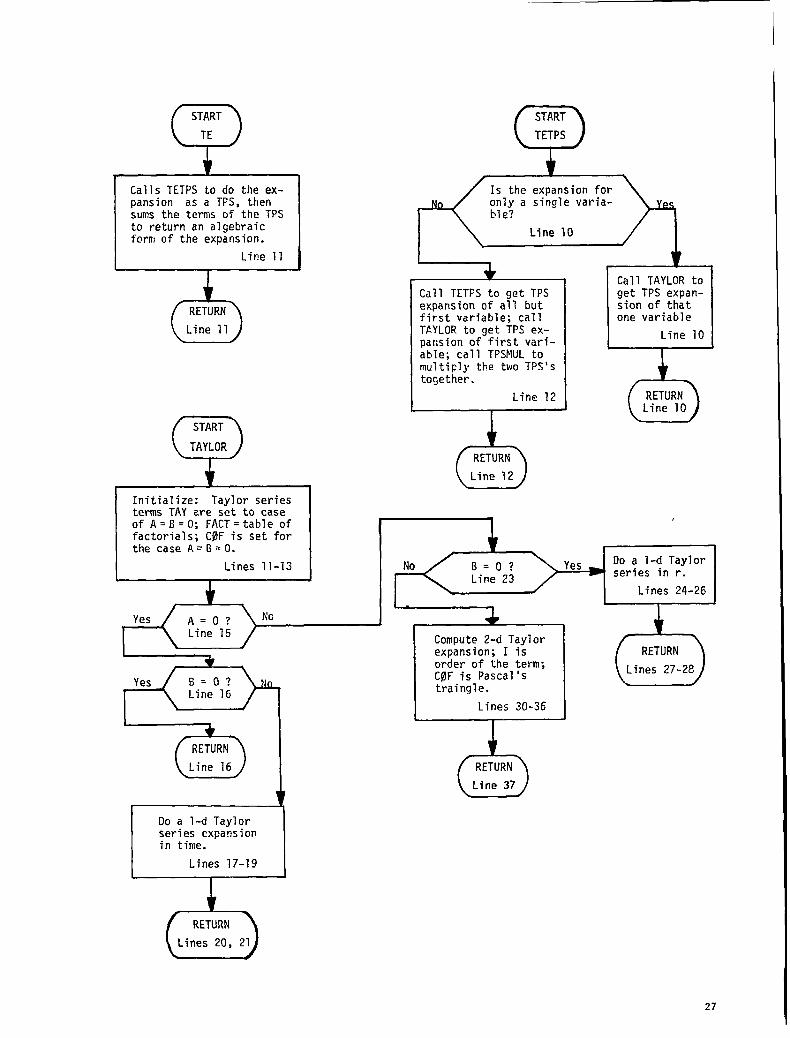
FLOW CHARTS FOR T1-!ETRUNCATION ERROR EXPANSION PROGRAM
7START
MAIN
w
Declarations, initializemaxitrumorder of the ex-pansions, initialize naxi-nwm exponer.ts by invokingPRfJCEDURE XP.
Lines 2-15
Set RORD, TORLJ,DERMOD, DEand FDE with user-suppliedALTRAN statements.
Lines 19-271
I Optional substitutions:RP=R+DR/2, RM=R-DR/2. I
YEND
‘ Print and punch RfJRC, TfWD,DERlfl$D,NUMER, and DEK!W.
Lines 65-66
t
Split the terms of MJ?DEQequalto GERVOD into their nm?ratorNIJMERand denominator CEN@M.
J Line 63I
Set.tiletruncated power seriesfcrtkemoc!ified equation, KCDEQ,equal to EE expanded [email protected] to make sure DERNfKlappearsto first order in DE.
I Lines 61-62
Lines 33-34I
1
I Commte truncation error TER as
+ +
mod’ifiedequation FDETPS minusdifferential equation DETPS.
Check for possible errors-1
of order A , print warn-ing message if”appropriate,and set NUMER=DEN@M=O forefficiency.
Use array substitution prccedureARRSllSto set F1 and F2 to unityfor the special case of a uniformmesh (optional).
Line 55
Use procedure TPSCklZ?Pto discardterms of FDETPS and DETPS thatare of hicjherorder than R9RD inDR and TORO in DT.
Discard terms of FCETPS that areof higher order than max (RORD,T@RD) in 1.
I Line 50 I
26
QSTART
TE QSTART
TETPS
Calls TETPS to do the ex-pansion as a TFS, thensums the terms of the TPSto return an algebraicform of the expansion.
Line 11
I
(5RETURNLine 11
START
TAYLOR
Initialize: Taylor seriesterms TAY we set to caseof A=B=O; FACT =table offactorials; COF is set forthe case A=B=O.
Lines 11-131
*
Is the expansion foronly a single varia-ble?
Line 10
Call TETFS to get TPSexpansion of all butfirst variable; callTAYLOR to get TPS ex-parisionof first vari-able; call TPSMUL tomultiply the two TPS’Stocjether.
Line 12I
ARETURN
w
vYes
I
Line 15
‘ies
f
ANo 6=0?
>
YesLine 23
+
Compute 2-d Taylorexpansion; I isorder of the term;COF is Pascal’straingle.
%1Lines 30-36
● 1
w 1x
Do a l-d Taylorseries expamionin time.
Lines 17-19
uRETURN
Line 37
t
Call TAYLOR toget TPS expan-sion of thatone variable
Line 10
I
(sRETURNLine 10
DO a l-clTaylorseries in r.
Lines 24-26
27
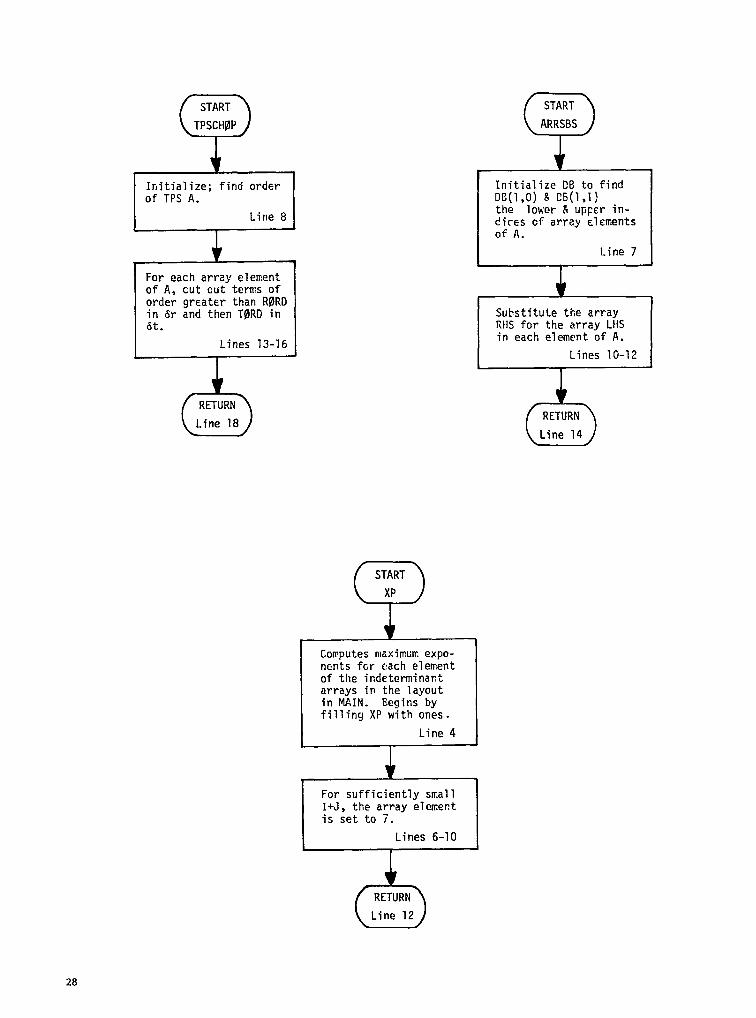
Ifiitialize;find orderof TPS A.
Line 8
For each array elementof A, cut out terns oforder greater than RORDin tirand then TORD in&t.
Lines 13-16
(5RETURNLine 18
START
ARRSBS
Initialize CB to findDll(l,O)& C6(1,1)the lower & upper in-c!ic~sof array elementsof A.
Line 74
I
Computes maximum expo-nents fcr each elementof the indeterminacyarrays in the layoutin MAIN. Begins byfilling XP with ones.
Substitute the arrayRHS for the array LHSin each element of A.
Lines 10-12
QSTART
XP
m
bRETURN
Line 14
(sRETURNLine 12
28
gP’!
c1zH5Hdz
Hjal
%01
20:u
.!5L!
rno
M.5u.:.-l
a
11
..#.8-$-:●:5.
awu.00x
.
tu
w0i3n0ua29
c
aN
mc
<<
t-C
c
.zc
ucsC
L.L>w-1
..
.
zcwLYc
=h.w
a5-
CG
l-tilnllv..
-x~ct=
6~z-tL
tYz
-I*=UI
axu
.LICYZC
ILc
LL>za+..
..mM
Qe
au
0.0
.<..u=v,
.LY
v..c*0
.
.cb,
cL4.
.&J
zv,u,>.+.>.xLc(YL
IL
n05
[*
1:858X
9M.
a:-J
Iz
8>
D:
a-a
Ozc-z
v
c
..
1-Z
L1-
<>
.-!r
-b
.
c’
..
c-m
-.0
ac.=-C
nC
c
*!t-IA
.c
It
8-.
.cL
-.*ZC
a:cZz
-ul--6
-~.
xlul-
$C
lm-.
)“●
t..2:.
:
9-1
a=,
u.
861-.
.
.E
.1-
t-+-3
II
n
xo
-t-.
.
u.cII
c.
2U.$
cCzCld
cc
.t-utJtLb
-2CZLL
J-:1
-15II
1-
w+‘aIMc
It
a
..u
c..
xw
zc
31
—
z0
m
*.zczw0
u.
.zczucX
l&-
c.x
zrcl-
hLLt-C
zb.=.
-.Z-s
-..>.
+.a1
aIA.
>cII
.--.-.
c-*
..
-ci
&L,
8-X
u?
L>1-Q>0-
L>Lc-
-)..
II-
.-u-a.
Ll,*-co
l..>
..
-c%C.Z
U!.t
-u,
c-
----
=.
--!-l>>->>-U
.c
luu.a
ma
mw
.-Laclia
-.o~
l-!-t-
:c.1?
wcEcl
l..xcx
..II+LI
cu.
.->
cc-.-llb
-<1--
I
)-ua.?.*C
-*ra-
cl-
-Ga
b$-c-
Zillu
3-Zc-:
<::;
Xltll
.1111a
cln.
-!r--
+-as
c6c
.
Itt-U.
h..-
*..->
L,*=<-z
2>
..7:(C
IIC
Z9-.
GW
6CLJ.
zC
r.l1511c
>cf,
G=-u,
0-!,-
.Z+n
e+a+x
I&.L’
.&C
6.115=
t-.-
.u
)-.
u.
m
ii
32
uvu
U..
-ULA
W,-
CC
WI
..
mL+II
.U
-W
.a
n!-l-.
.
zu.,cc
czin
GzLL
LU-J
=Id
xuz
.nt.
xxx
-1
-f_l._
<<
<U-.2
33
xxX
xxxx
Xxxx
v,(n
InC
ow
.rn
In*u.
lnvl
Xxxx
V31n
ultn
fx(i.L,CL.
ccu.
!!$C
zcc%
Zwu
at-c
Wua
CN
C.
u,u,>.
34
.
&ccu.,=.a.L&
au2.c
?Juzu2u.>
cc
>X
XX
xxxxxx
U.I
0W.-k
.z8
u.-
..-
*.c
--.w
f,-#-+
-
ZIA,
a>.
.xD-.
+..
uGk.
!5clx
3...--am
E4:
L.-
.rur=..
A-ZLI.
-z11k
2-.1)-<-c
c11--,
uz
cu.=
*LA-C
Cz
8-Cc
IL
cc
cc
.--wo-
rz%..
LA.
>74m
i-
va
Yvwx
I&zt-
0x
m
4
35
—
II
wc
v-(-U
&
z.
>*
xx
v..
u.
<iU.
V.
ICU
.WV
Y
+..C
u(n
-1
u.>
1!I.Q
05
uluJ
mb.cc?
ma:
U4C
J
>>a
ccv.
lov-
Ccnzzzz
<<c
Ccc
>>u
L’tJL.
wu;=
zb
.>zun)-Je
ccm
-—Ga
xc
Uz
4.wa
+zxws
-
36
zQ:Q!
zN
m-
.w
E.
.
37
Onthispageandthenext,thereadershouldbeawarethatthecolumns,
beginningwithT(0,3),
aretobereadasonecontinuousrun.
..-..
..
..
..
-....
..
●✍
✎✎
✎✍
..
..
..
..
-...
●✎
✎✍
✍✍
✍✍
✎✎
✎✎
✍
al
..
..
..
..
...=
..
..
..
..
.----
..
..
..
..
..
----.
..
..
..
..
..
..
..

..
..
...-.
..
..
..
.---
..
..
.
..
..
..s.
..
..
..
..
..
..
..
.
..
..-..
..
..
..
..
.n..
..
..
-.-..
.---
n-.----
r-
t-u?-
=lv
.&r-
.--n---
nvla
u-.
cT
-5
.n
’ra*lrla
r-.
..-..
..
..
..
..
.W
.4-O
.C<
*.G.c
l.r-r.
-*
br-
r--
U..
..
..
L-
E5
US
C2c
s.----
.Uu
..
..
-------
--
39
z.2!
.Lc
.6
.
6
.
6
cb.>h.c
N●
.6.
6
wn
t’un!
Saaw
In.c
:.r-t
u.
..
-.4?r-
..
?-b-.
.+)-s
aIdn.
I6
zQ
t-a
cl)
v.
mw
.
u..a(nx
40
w“
2awca
*kn.a●z8
D
.
..
..
..
..
---.
41
-...
..
.m
...-.
..
..
IbJ
c
r-
..
..
..
..
..
..
..
..
.---
...-
42
mCr
*,L-,
u.
z.
W
z<xcz
W.
-1zz.
t..
rr-mrvlx.
4-.
1-
_,2’a
-L-
t-VIc?.
c.(s1-
***
43
#;=.N.
,.:
?*.*.=
*
..●
,2
nn
%
●k0a
.
44
Onthispageandthenext,thereadershouldbe
awarethatthecolumns,beginningwithT(1,4),
aretobe
readasonecontinuousrun.
..-
-...---
.-*.---
..
..
*--
...*
-..
..----
..*..
..
●☛
✎✎
✎
------
------
----
----
lvl-l*In4)r
.(u
----.
.r)
*u,
@f-
“(u
r)e
u)
w1-
..*
ml
m.?
If).
.----
..
.-....*
00
g0“
00
.d
d-
.-Z
.+.-I
.t-u
ntN
t-kn
NN
.A
f-,~
m~.
..
..
---
---
---
---
----
---
-i-)-+
1-t-l-c)-
+>
+*I-J-
C*E
+L
-+
++
,---
--
i--k●
+
..
..*-*..
..
..
..***.-.
----_
a=u)w
**..*---
.**-----
-..*--m-
-*.
45
..
----.*-
..-..
..
00
..
Irm
nn
‘mn
-----
----*--
-.-***-
-----
..
..----
-------
-...
..
.-.
n
46
.0. ●=2
●D
1“.
..::nx’
*::N:1-
..c.c.c.c.0
.
c.nJ
.=.r,
I
●
3.u&
1n
an*
n
47
*\
!0.-.
●D
●
.-.
.*W.
m1-
.*rG-
+-C
.N.m1-
.u.CL
●W
.IN
..-m..+
..
.-.-.
.In.-00--*k
-.-‘n.08-
.,-r-.08-
1-
48
b.aG
uv
uPn**
“aC
fJ.,
-L
k)-UJ
1-
W
ns
un
*
..&.*1
-
.1-:1-
.*:1-
.U1.at-
...
.r-
C1
-
..m.f-t-
..0.1-&
1-
n
..-.*-.
...-
..-----
..
.*..
-------
---.-.
------
---*ru
rI*lnat-
ficuw*m
.o1
----
.tw
mu
mw
Jr-
-...-.
Nt-)
..
..
-.0.
..
..
..
mm
r;
mF’
v.-
e*
+*
4u
4-
ul
mm
ar
u’
r!-
e4
e.-.
---
---
----
---
----
---
-bet-l-fit-
t-c
b-kl-l-
**#-
c*t-
b-1-kkkr
)-*F
---
49
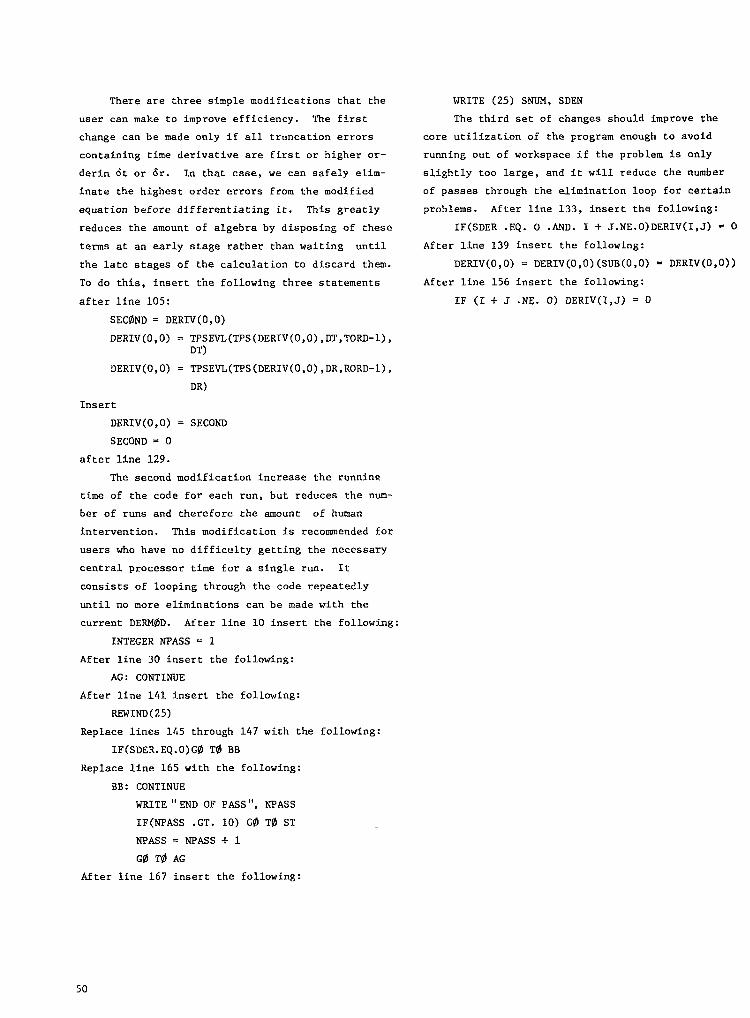
There are three simple modifications that the
user can make to improve efficiency. The firat
change can be made only if all truncation errors
containing time derivative are first or higher or–
derin dt or 6r. In that case, we can safely elim–
inate the highest order errors from the modified
equation before differentiating it. This greatly
reduces the amount of algebra by disposing of these
terms at an early stage rather than waiting until
the late stages of the calculation to discard them.
To do this, insert the following three statements
after line 105:
SECOND= DERIV(O,O)
DERIV(O,O)
i)ERIV(O,O)
Insert
DERIV(O,O)
SECOND = O
after line 129.
The second
= TPSEVL(TPS(DERIV(O,O),DT,TORD-l),DT)
= TPSEVL(TPS(DERIV(O,O),DR,RORD-1),
DR)
= SECOND
modification increase the runnine
time of the code for each run, but reduces the num-
ber of runs and therefore the amount of human
intervention. This modification is recommended for
users who have no difficulty getting the necessary
central processor time for a single run. It
consists of looping through the code repeatedly
until no more eliminations can be made with the
current DERM@D. After line 10 insert the following:
INTEGER NPASS = 1
After line 30 insert the following:
AG: CONTINUE
After line 141 insert the following:
REWIND(25)
Replace lines 145 through 147 with the following:
lF(SDER.EQ.O)G@ To BB
Replace line 165 with the following:
BB: CONTINUE
WRITE ’’ENDOF PASS”, NPASS
IF(NPASS .GT. 10) Go To ST
NPASS = NPASS + 1
GO To AG
After line 167 insert the following:
WRITE (25) SNUM, SDEN
The third aet of changes should improve the
core utilization of the program enough to avoid
running out of workspace if the problem is only
slightly too large, and it will reduce the number
of passes through the elimination loop for certain
problems. After line 133, insert the following:
IF(SDER .EQ. O .AND. I + J.NE.O)DERIV(I,J) = O
After line 139 insert the following:
DERIV(O,O) = DERIV(O,O)(SUB(O,O) = DERIV(O,O))
After line 156 insert the following:
IF (1 + J .NE. O) DERIV(I,J) = O
50
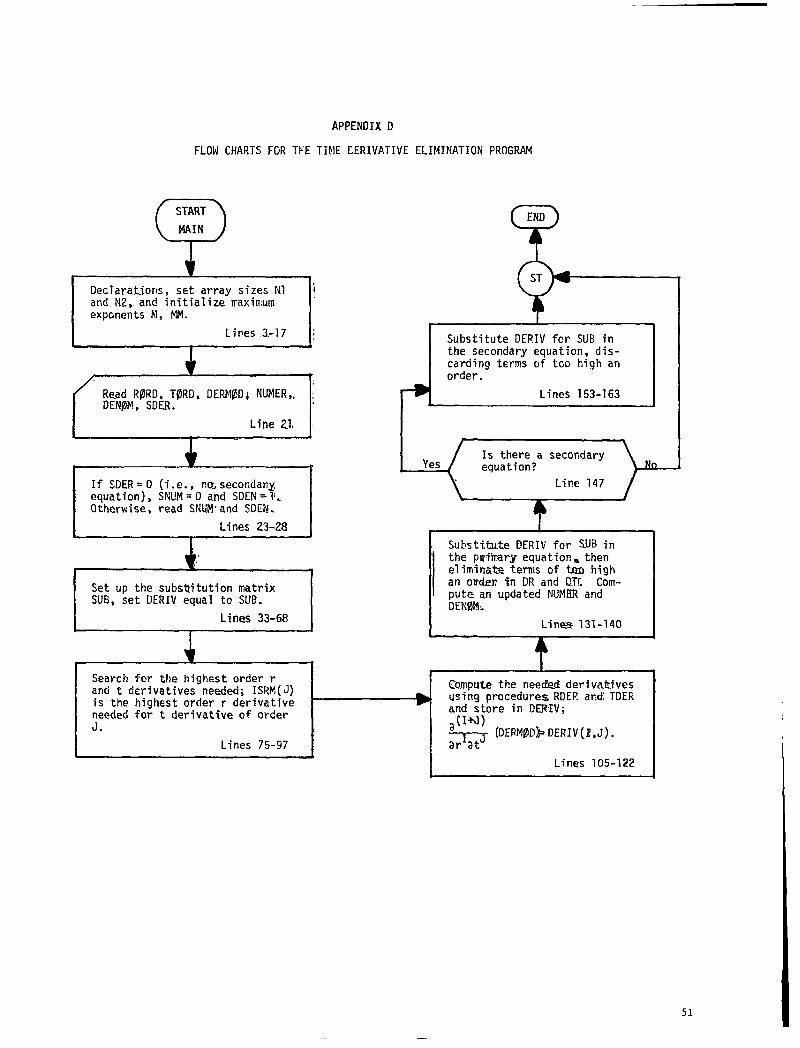
APPENDIX D
FLOW CHARTS FGR TFE TIME DERIVATIVEELIMINATIONPROGRAM
TSTART
MAIN
Declarat-iorls,set array sizes N1 ~and N2, and initialize rraximumexprments hl,MM.
I
(Read R@RD, TORD, DERM@D~ NUMER,,DENflM,SDER.
Line 23,
IIf SDER=D (i.e., n~se~ondanyequation), SNUM=O and SDEN=l’.Otherwise, read SNkiM’andSOEN.
Lines 23-28
kuuIEidSet up the substitution matrix
r
TEND
&-Substitute DEI?IVfcr SUB inthe secondary equation, dis-carding terms of triohigh anorder.
Lines 153-163I
IJ.J equation? bQ--1s there a secondary
Substitute DERIVfor UB inthe prrilr!aryequation~ thenelimirrak terms of t.mahighan o@w fn DR and DT(. Com-putew updated NUMER andDENflM:.
Lines 131-140
Search for the highest order rand t derivatives needed; ISRM(J) Compute the needed derivatives
is the highest order r derivative + ‘ using procedures RDEf?and TDER
needed for t derivative of order and store in OERIV;
J. ~(wl)
Lines 75-97 1~ (DERMODkDERIV(E,J).ar at
L I
I Lines 105-122
51
—
9START
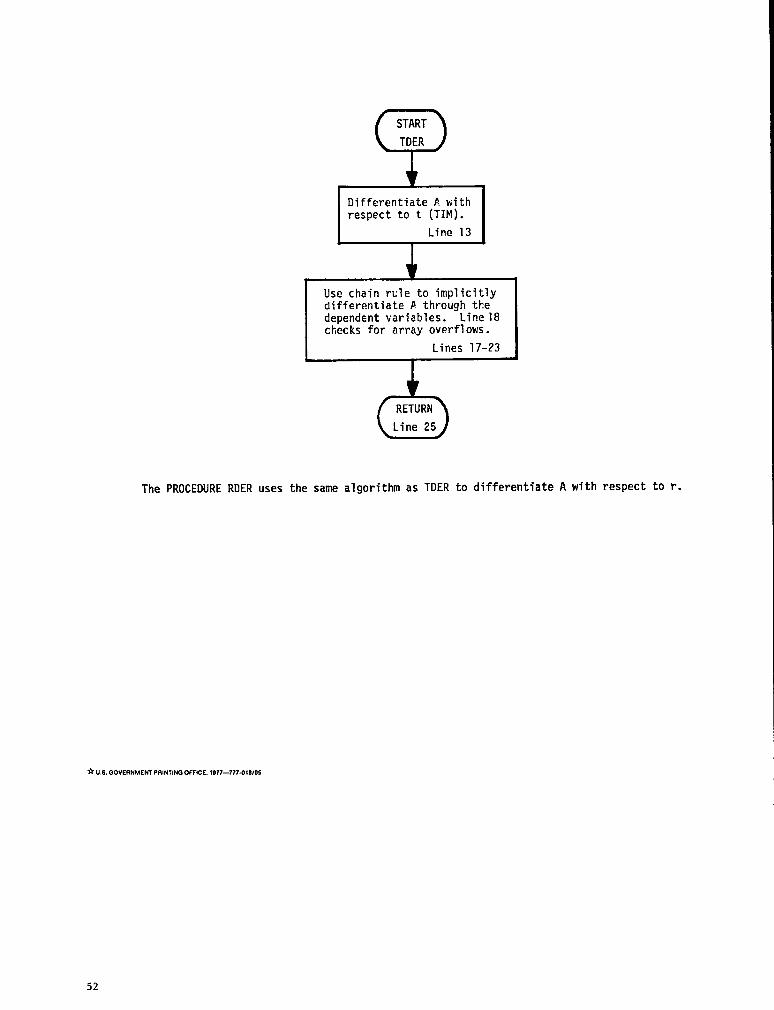
TDER
Use chain rule to implicitlydifferentiate P through thedependent variables. Line18checks for array overflows.
Lines 17-23
I
(5RETURNLine 25
The PROCEDURE RDER uses the same algorithm as TDER to differentiate A with respect to r.
* U.8.CIOVEUNMENTPRINTIW OFFICE 1977-777.016/9’3
52