Embed Size (px)
Citation preview

Automatic localization of the optic discin digital colour images of the human retina
A thesis submitted inpartial fulfillment
of the requirements forthe Degree of
Master of Sciencein Computer Science
at theUtrecht University
byFrank ter Haar
December 16, 2005INF/SCR-04-03

Abstract
Detection of the optic disc (OD) is an essential step in the automatic analysis of digital colourfundus images. In this thesis the performance of fifteen OD-detection methods are compared. Atotal of eight methods were implemented as described in the literature and seven new methodswere developed. The methods described in the literature use various OD-properties to localizethe optic disc:
• search for an area with a high intensity variation to localize OD[1].
• search for an area resembling an OD-template[2].
• OD-localization by selecting the largest region consisting of high intensity values[3].
• estimate the OD-contour by employing the Hough transform on detected edges[4].
• use of multiple vessel convergences and if necessary an OD-localization searching for a largeregion consisting of high intensity values[5]. The convergence method and the brightnessmethod are also introduced individually.
• estimate the OD-contour using Hausdorff-based matching between detected edges and acircular template[6].
New methods include pruning the Hough transform technique using the vasculature, twomethods using a pyramidal decomposition approach and two new vessel convergence methods.A final method uses a novel algorithm that extracts the orientations of segmented vessels toconstruct a model in which each pixel indicates the expected vessel orientation. Then the vesselorientations are extracted from the query image and the optimal fit for this image on the modelresults in an OD-location.
The comparison of the methods is performed using two datasets. The first dataset (HOORN)is composed of randomly selected images from a DR-screening database. It contains 140 healthyretinal images and 51 diseased retinal images with a resolution of 768 × 584 pixels. The otherdataset was taken from the STARE project, which contains 31 healthy retinal images and 50diseased retinal images. These images have a resolution of 700× 605 pixels.
Based on the results of the conducted experiments we conclude that the method, whichuses vessel orientations, performs best in localizing the optic disc in both datasets. Besidesthe OD-localization, this method is also able to determine the type of eye (left or right) andan approximate macula location. On the HOORN-dataset the novel algorithm achieved 99.5%correct OD-localizations and on the STARE-dataset this algorithm achieved 93.8% correct OD-localizations. The type-of-eye determination is correct in 100% and 95.1% on the HOORN andSTARE-datasets respectively.
These results are compared with the other OD-detection methods. The comparison demon-strates that the implemented methods localizing the optic disc with the use of intensity variation,high intensity values, shape and vessel locations are not very robust in detecting the optic disc.The methods combining these properties often result in improved localization techniques. How-ever, these techniques fall short when it comes to localizing optic discs in difficult images suchas encountered in the STARE data. A method using more global retinal properties, like vesselorientations, outperforms all other implemented methods. The vessel orientation method showsrobustness in the presence of pathology and is able to find nearly all optic discs in a datasetconsisting of screening data.

Contents
1 Introduction 31.1 Arrangement of this thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 The human retina 52.1 The neurosensory retina . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 The effect of DR on the retina . . . . . . . . . . . . . . . . . . . . . . . . . 72.3 Examining the human retina . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Automatic OD-detection methodsexisting methods 113.1 Preprocessing operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.1.1 Creating the mask image . . . . . . . . . . . . . . . . . . . . . . . . 123.1.2 Cropping the fundus image and adding a border . . . . . . . . . . . 133.1.3 Shrinking the region of interest . . . . . . . . . . . . . . . . . . . . 13
3.2 Method based on mean variance . . . . . . . . . . . . . . . . . . . . . . . . 133.2.1 Literature description . . . . . . . . . . . . . . . . . . . . . . . . . . 143.2.2 Method implementation . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Method based on template matching . . . . . . . . . . . . . . . . . . . . . 183.3.1 Literature description . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3.2 Method implementation . . . . . . . . . . . . . . . . . . . . . . . . 18
3.4 Method based on the largest object . . . . . . . . . . . . . . . . . . . . . . 193.4.1 Literature description . . . . . . . . . . . . . . . . . . . . . . . . . . 193.4.2 Method implementation . . . . . . . . . . . . . . . . . . . . . . . . 19
3.5 Method based on the Hough transform . . . . . . . . . . . . . . . . . . . . 203.5.1 Literature description . . . . . . . . . . . . . . . . . . . . . . . . . . 203.5.2 Method implementation - conventional . . . . . . . . . . . . . . . . 213.5.3 method implementation - alternative . . . . . . . . . . . . . . . . . 22
3.6 Method based on multiple fuzzy convergences and equalized brightness . . 243.7 Method based on illumination equalization with hypothesis generation . . . 25
3.7.1 Literature description . . . . . . . . . . . . . . . . . . . . . . . . . . 253.7.2 Method implementation . . . . . . . . . . . . . . . . . . . . . . . . 26
3.8 Method based on fuzzy convergence with hypothesis generation . . . . . . 273.8.1 Literature description . . . . . . . . . . . . . . . . . . . . . . . . . . 273.8.2 Method implementation . . . . . . . . . . . . . . . . . . . . . . . . 29
3.9 Method based on pyramidal decomposition with Hausdorff-based templatematching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.9.1 Literature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1

3.9.2 Method implementation . . . . . . . . . . . . . . . . . . . . . . . . 31
4 Automatic OD-detectionnew methods 334.1 Method based on the binary vasculature with the Hough transform . . . . 334.2 Method based on fuzzy convergence with the Hough transform . . . . . . . 334.3 Method based on illumination equalization with pyramidal decomposition . 354.4 Method based on pyramidal decomposition of both the vasculature and the
green plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.5 Method based on the branch with the most vessels . . . . . . . . . . . . . 37
4.5.1 Construction of the vessel-branch network . . . . . . . . . . . . . . 374.5.2 Selection of the branch with the most vessels . . . . . . . . . . . . . 39
4.6 Method based on path convergence with the Hough transform . . . . . . . 404.6.1 Finding suitable paths . . . . . . . . . . . . . . . . . . . . . . . . . 404.6.2 Calculate convergence . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.7 Method based on vasculature fitting on a directional model . . . . . . . . . 434.7.1 Construction of the directional model . . . . . . . . . . . . . . . . . 444.7.2 Fitting a segmented vasculature on the model . . . . . . . . . . . . 47
5 Experiments and results 515.1 Datasets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.1.1 HOORN-dataset . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.1.2 STARE-dataset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.2 Manual optic disc segmentation . . . . . . . . . . . . . . . . . . . . . . . . 535.3 Experiment: Localization of the optic disc . . . . . . . . . . . . . . . . . . 56
5.3.1 Purpose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.3.2 Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.3.3 Literature results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.3.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 575.3.5 Observations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 635.3.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.4 Experiment: Determination of the eye-type . . . . . . . . . . . . . . . . . . 685.4.1 Purpose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 685.4.2 Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 685.4.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 695.4.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6 Discussion and future research 70
A Typical OD-localization failures 72
B Failed OD-localizations using method M15 - vasculature fitting on a di-rectional model 76
C Failed TOE-determinations using method M15 - vasculature fitting on adirectional model 78
2

Chapter 1
Introduction
This thesis concerns the development of an automatic, robust OD-detection method. Theperformance of this method is compared to the performance of several other automatic al-gorithms. OD-detection is an integral part of the screening system for diabetic retinopathy(DR).
DR is an eye-disease that is very common among people who are suffering from diabetestype 1 and 2 and a leading cause of blindness in the working population of Europe andthe United States. Effective treatments are available that inhibit the progression of thedisease. Therefore an early detection of DR is very important to delay the progress of thedisease and to postpone blindness. However, patients suffering from DR usually do notnotice any visual imperfections until the disease has affected a large area on the retina. Sothere is an urgent need for mass-screening diabetes patients.
To determine if a person suffers from DR, a photograph is taken from the retina andexamined. Performing the mass-screening of diabetes patients will result in a large numberof images, that need to be examined. The cost of manual examination is prohibiting theimplementation of screening on a large scale. A possible solution could be the developmentof an automated screening system for retinal images. Such a system should be able todistinguish between retinas affected by DR and normal retinas. Then the ophthalmologisthas to examine only those images designated by the system as possibly abnormal. Thiswill significantly reduce the workload for the ophthalmologists.
In an image, that needs to be examined by the automated screening system, a numberof different eye-diseases may occur. The automated DR-screening system examining theretinal image will focus on the anatomic structures of the eye first, just like an ophthal-mologist would do. The retina contains anatomic structures like the vasculature, an opticdisc and a macula, however, these structures are not necessarily captured in the retinalphotograph. When the system has located these structures in the image, then these loca-tions will be used as landmarks for the detection of symptoms for DR. However, creating arobust automated OD-detection method is not trivial, because the appearance of the opticdisc may vary due to retinal diseases.
3

1.1 Arrangement of this thesis
This thesis is set up as follows:
• In the next chapter, information about the human retina and the appearance of the retinalis presented.
• Automatic OD-detection methods implemented as described in literature are presented inthe third chapter.
• In chapter four we will describe newly developed methods.
• In the fifth chapter, the experiments performed and results obtained using the implementedmethods are discussed.
• The discussion and suggestions for future research are included in the sixth and final chap-ter.
1.2 Acknowledgments
In November 2003 I started working on this M.Sc. project. My supervisor at the ImageSciences Institute in Utrecht was Meindert Niemeijer. I am thanking him for his effortsconcerning supervision and feedback on my thesis and also for providing me with thesegmented vasculatures needed for my experiments. Twan Maintz was my supervisor fromthe Institute of Information and Computing Sciences of the Utrecht University. I amthanking him also for supervising me. I would also like to thank Bram van Ginneken forgiving me valuable feedback and ideas concerning this project and thesis.
Finally a special thanks goes out to my parents and my girlfriend, for their continuoussupport during my study and to my parents for giving me the opportunity to attenduniversity.
4

Chapter 2
The human retina
2.1 The neurosensory retina
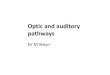
The neurosensory retina, usually called retina, is the largest part of the fundus which is theinterior surface of the eye. The retina is a multi-layered sensory tissue that lines the backof the eye (see figure 2.3). The fundus includes the retina, the optic disc, and the macula.These structures are shown in figure 2.2. How the retina is located in the eyeball can beseen in figure 2.3. The retina contains millions of photo-receptors that capture light raysand converts them into electrical impulses. These impulses travel along the optic nerve tothe brain. The brain then “interprets” the electrical message sent to it, resulting in vision.
There are two types of photo-receptors in the retina: rods and cones, named after theirshape. The retina contains approximately 6 to 7 million cones and about 125 million rods.Rods are the photo-receptors that are more responsive to light than the cones. Whether thecones or rods are used, depends on the amount of incoming light. In daylight the cones aremost active, under dark circumstances the rods are most active and at dusk a combinationof the two are used. In the human eye there are three distinct types of cones, and eachtype of cone responds to a different part of the colour spectrum. When the three differenttypes of cones are located in a small area of the retina, the responses are combined. Thisenables us to see colours from the colour spectrum. The rods, on the other hand, are notsensitive to colour.
When light enters the pupil, it is focused by the cornea and lens, and is projected ontothe retina. The retina converts light into electrical impulses by use of the rods and cones,but the cells that transmit the neural signal to the brain are the ganglion cells. The axonsof these ganglion cells make up the optic nerve, the single route by which informationleaves the eye. When examining the back of the eye a portion of the optic nerve called theoptic disc can be seen. At the optic disc the retina contains no photo-receptors. The resultof having no photo-receptors at the optic disc is that light cannot be converted to neuralsignals and this creates a hole in our vision. That is why the optic disc is often called theblind spot.
Normally each eye covers for the blind spot of the other, and the brain fills in missinginformation with whatever pattern surrounds the hole. That is also the reason why we arenot consciously aware of the existence of the blind spot. The retinal vessels branch outfrom the optic disc toward the retinal periphery. Normally, the vessels end about one ortwo mm before the retinal periphery. Two of the large vessels branching out of the opticdisc are located around the center of the retina, called the vascular arch. The center of the
5

Figure 2.1: The anatomy of the right eye fundus.[7]
retina is called the macula and can be recognized as the region within these two vascularbranches. The macula has approximately the same size as the optic disc and has a darkercolour than the rest of the retina. The macula is also the thickest portion of the retina witha thickness of 0.22 mm, except for the fovea, which is only 0.10 mm thick. The thicknessand the dark colour of the macula are due to pigment granules, other parts of the retinahave less of these pigment granules. The fovea is a small circular area (diameter ≈ 1500µm)within the macula. The retina is at its thinnest at the fovea, only small blood vessels lie inthe fovea and the central area of the fovea is even devoid of blood vessels. At the fovea theretina consists exclusively of cones, and the density of the cones and ganglion cells is veryhigh in contrast to other parts of the retina. These properties of the fovea all contributeto the same purpose, and that is to make sure that as much light as possible reaches thecones and to optimize the conversion from light to electrical impulse. The result of theseproperties is a region of high visual acuity.
The fovea will always be directed to the object one studies, because of its possibility todetermine small details. But in a dark environment, the light directed onto to fovea resultsin a very low response, because of the lack of rods in the fovea. In this case it is thereforebetter to look next to an object, because then the reflection of the object is directed ontoa part of the retina with rods with the result that the object can be seen more clearly(Sources used: [7, 8, 9, 10, 11]).
6

Figure 2.2: The anatomy of the eye.[11]Figure 2.3: Location and appearance ofthe retina.[10]
2.2 The effect of DR on the retina
Symptoms of DR influence the appearance of the human retina. The progress of DR can besubdivided into four stages (see also figure 2.4). In the first stage only a few symptoms ofDR will be visible on a retinal photograph. As the disease progresses additional symptomswill become visible.
• Early Non-proliferative Retinopathy. At this earliest stage, micro-aneurysms occur. Theyare small areas of balloon-like swelling in the retina’s tiny blood vessels.
• Advanced Non-proliferative Retinopathy. As the disease progresses, some blood vesselsthat nourish the retina are blocked.
• Very advanced Non-proliferative Retinopathy. Many more blood vessels are blocked, depriv-ing several areas of the retina from their blood supply. These areas appear as white/yellowishspots, called cotton-wool spots. The cotton-wool spots send signals to the body to grownew blood vessels for nourishment.
• Proliferative Retinopathy. At this advanced stage, the signals sent by the retina for nour-ishment trigger the growth of new blood vessels. This condition is called proliferativeretinopathy. These new blood vessels are abnormal and fragile. They grow along the retinaand along the surface of the clear, vitreous gel that fills the inside of the eye. By themselves,these blood vessels do not cause symptoms or vision loss. However, they have thin, fragilewalls. If they leak blood, severe vision loss and even blindness can result.
2.3 Examining the human retina
The macula is the part of the human retina that is used to see during your day to dayactivities. Damage to the macula by DR will result in severe vision loss. In case ofproliferative-DR, new blood vessels will grow out of the OD-region. When a retina hasto be examined, the ophthalmologist will focus his attention on the area containing the
7

Figure 2.4: The progress of DR which may result in blindness. Stage I: Early Non-proliferativeRetinopathy. Stage II-III: Advanced Non-proliferative Retinopathy. Stage IV: ProliferativeRetinopathy. After stage IV blindness may occur.
macula and the area containing optic disc. For the eye-examination of a patient at leastfour photographs of the patient’s retina will be taken, other photographs might focus onsymptoms of retinal diseases or on the effects of laser surgery:
• macula centered left eye
• OD-centered left eye
• macula centered right eye
• OD-centered right eye
A healthy retinal image may contain anatomical structures like the macula, the opticdisc and bloodvessels. An image of a diseased retina may also contain any visible symptomsof the eye-disease. In general a photograph of the retina contains the optic disc and/or themacula. The type-of-eye (left/right) determines the location of the macula with respect tothe optic disc. In the retinal image of a left eye, the macula is located on the right of theoptic disc, while the macula is located on the left of the optic disc in a right eye image (seefigures 2.5 and 2.6).
Figure 2.5: Left: A healthy macula centered left eye retina. Right: A healthy macula centeredright eye retina.
8

Figure 2.6: Left: A healthy OD-centered left eye retina. Right: A healthy OD-centered righteye retina.
The optic disc in a healthy retinal image usually appears as a bright yellowish andcircular shaped object which is partly covered with vessels. However, the entire retinaas well as the optic disc may appear different due to the photography, just like a regularphotograph. A photograph may, for instance, suffer uneven illumination resulting in a lessdistinct OD-appearance or it may be blurred (see figure 2.7). Diseases may also affectthe OD-appearance: Proliferative-DR results in an optic disc covered with vessels. Someexamples of images in which the optic disc appears different than usual are shown in figure2.8. During the development of an automatic OD-detection method it is important toconsider that the optic disc in an image varies in appearance, size and location.
Figure 2.7: Left: An image with uneven illumination. Right: A blurred image.
9

Figure 2.8: Diverse appearance of the optic disc.
10

Chapter 3
Automatic OD-detection methodsexisting methods
In the literature a number of different techniques have been employed to automaticallydetect the optic disc. In general these techniques apply preprocessing operations, followedby several image processing operations and finally the OD-localization (see figure 3.1).A preprocessing is for instance the generation of a mask image to determine which areabelongs to the actual fundus and which area belongs to the background of the image. Someof the automatic OD-detection methods produce only a point that can be used as the OD-center, while other methods obtain the optic disc as a circle consisting of an OD-centerand a radius.
Figure 3.1: The process of detecting the optic disc.
The first section describes the preprocessing operations that are used by several OD-detection methods. Other sections describe existing algorithms from the literature. Eachof the automatic optic disc algorithms is described by giving a theoretical description incombination with a practical implementation description.
11

3.1 Preprocessing operations
Preprocessing operation are often necessary to exclude potential OD-regions. A regularlyused preprocessing operation is the creation of a mask image. This operation labels pixelsbelonging to the region of interest (ROI) in the entire image. Other preprocessing oper-ations used in this thesis are the cropping of an image and the shrinking of the image’sROI.
3.1.1 Creating the mask image
A colour fundus image consists of a (semi) circular region of interest on a dark background.This dark background is initially never really black. It is important to distinguish betweenbackground and foreground, because most of the algorithms only need to consider theforeground pixels. However, sometimes an algorithm also uses the background pixels, forthis purpose the background colour can be changed. For instance when a smoothing kernelis applied on the image, some foreground pixels are smoothed with a few backgroundpixels, changing the background colour will reduce the influence of the background. Thenon-background part of the fundus photograph will be referred to as the region of interest(ROI). The ROI is detected in the following manner:
1. A threshold t is applied on the red plane of the colour image. The threshold valuet = 35 was determined empirically.
2. An opening is performed on the thresholded image with a 3× 3 square kernel.
3. A closing is performed on the result with the same kernel.
4. One extra erosion step is performed with the same kernel.
The final result is an image in which the background pixels are assigned the value zeroand pixels within the ROI are assigned a value of one (figure 3.2). Multiplying the originalcolour image with the created mask image results in a colour image without noisy pixelsin the background, while the ROI is left unchanged.
(a) (b)
Figure 3.2: Figure b shows the created mask image of figure a.
12

3.1.2 Cropping the fundus image and adding a border
Cropping the fundus image reduces the image size and herewith reduces the computationtime for operations that apply heavy computations for each pixel, like template matchingand the Hough transform. The mask image is used to find the bounding box of the ROI.From the original image this bounding box is selected as cropped fundus image and fromthe mask image this bounding box is selected as cropped mask image. To these new imagesa border is added. Adding a border is sometimes necessary to be able to apply operationson all ROI-pixels. In fact the border must be larger than half the size of a certain kernelor running window applied. The results of cropping the fundus image and adding a bordercan be seen in figure 3.3. The bounding box of the mask image (768× 584 pixels) has thesize of approximately 540 × 540 pixels. The final fundus image, after adding a border oftwenty pixels, is approximately of size 580× 580 pixels.
(a) (b) (c)
Figure 3.3: Figure b shows the cropped mask image with a border added. The bounding boxand the border size are used to create figure c out of figure a.
3.1.3 Shrinking the region of interest
Shrinking the region of interest seems like an awkward operation, because shrinking theregion of interest means that a part of the fundus image will be labeled as background.However, sometimes this can be useful, for example: when the derivative image of thefundus image is taken, one of the highest derivative values will be the transition frombackground to foreground and vice versa. These transitions should not be considered andmultiplying this image with the smaller mask image will solve this problem.
Shrinking the region of interest with an amount of n pixels uses the bounding box ofthe region of interest. The middle of the bounding box is set as the center point of a circle.The radius of the circle will be the maximum of the two dimensions of the bounding box.Then each pixel in the image further away from the circle center than this radius minus npixels will be set to zero. Note that this only works for circular region of interests. If theregion of interest is not circular, then the ROI could be shrunk by using a circular shapedkernel. To shrink the ROI with an amount of n pixels, an erosion with a circular shapedkernel of size (2 ∗ n) + 1× (2 ∗ n) + 1 should be applied.
3.2 Method based on mean variance
The following sections describe different automatic OD-detection methods. The maskimage is assumed to be available during the algorithm’s computations and each image is
13

Figure 3.4: The results of shrinking the ROI with n pixels.
cropped first and a border of twenty pixels to all sides is added.
3.2.1 Literature description
A variance-based OD-detection method is given by Sinthanayothin et al.[1]. This methodassumes the appearance of the optic disc as a yellowish region typically occupying ap-proximately one seventh of the entire image. That is around 80×80 pixels. The intensityvariance of the image should be at its highest within the optic disc because of relativelyrapid variation in intensity values. The reason for this variation is the appearance of darkblood vessels besides bright nerve fibers. The variance-based OD-detection method can bedivided into three different steps:
• Local contrast enhancement
• Determination of the variance within a running window
• Determination of the average variance within a running window
Local contrast enhancement
Each pixel within the fundus image contains three values, red, green and blue. Each valueis quantized to 256 gray levels. The first step in performing the contrast enhancement is toconvert the three colour bands red-green-blue to an intensity-hue-saturation representation.Then the contrast of the intensity can be enhanced without affecting the relative colourvalues of the pixels. Enhancing the intensity values of the image results in an increaseof the variance-output. To increase the intensity of the fundus image Sinthanayothin etal.[1] use a running window of M × M pixels, with M = 49. For each pixel (i, j) with0 ≥ i, j < N within the intensity image of size N ×N the running window (W ) is placedon the image with its center on the current pixel. This window is used to calculate thenew intensity value for the central pixel by the following formula.
g(i, j) = 255[ΨW (f(i, j))−ΨW (fmin)]
[ΨW (fmax)−ΨW (fmin)](3.1)
In the formula above the variables fmax and fmin are the maximum and minimumintensity values within the entire image. The function ΨW can be calculated as follows.
14

ΨW (f) =
[1 + exp
(fW − f
σW
)]−1
The variable fW is the mean intensity value within the current running window and thevariable σ2
W represents the standard deviation of the intensity values within the sub-image.These values are calculated with the following formulas.
fW =1
M2
∑∀(k,l)∈W
f(k, l)
σ2W =
1
M2
∑∀(k,l)∈W
(f(k, l)− fW )2
When the σW is low for a certain sub-image, then the window has poor contrast andas a result the contrast is enhanced a lot. On the other hand when σW is high for arunning window placement, then this window has high contrast and then the intensityis only enhanced a little. A problem that occurs with the contrast enhancement is thatnoise within an image also increases, during the contrast enhancement. To avoid thisSinthanayothin proposes applying a 2D Gaussian smoothing filter or a median filter onthe original image before contrast enhancement. After the contrast enhancement of theintensity plane of the IHS-image the image can be converted back to an RGB-image. Thefinal result should look like figure 3.5.
Determination of the variance within a running window
After the contrast of the intensity image in enhanced a running window of size M × Mis applied on the image, with M = 80. The value M = 80 is chosen because the averageoptic disc diameter is equal to 80 pixels. The center of this sub-image is placed with itscenter on each pixel (i, j) in the intensity image. The new value of the pixel (i, j) will bethe variance value of the entire current sub-image. Undefined pixels within the runningwindow, like pixels outside the ROI, are set to zero and the normalization factor is reducedcorrespondingly. The new value for each pixel is calculated as follows.
h(i, j) = varW =1
M2
∑∀(k,l)∈W
g2(k, l)− gW (3.2)
Where g represents the intensity enhanced pixel value (equation 3.1).After the intensity values are transformed into variance values the image should have
high values in regions with high intensity fluctuations. Regions of the fundus containingblood vessels should be highlighted and especially the ones located in the optic disc becauseof the high contrast between the bright nerve fibers and the dark blood vessels. To pinpointone location as the OD-region another running window has to be applied.
Determination of the average variance within a running window
The region with the highest variance values is defined as the region containing the opticdisc. However, we are not looking for an OD-region but for the center of the optic disc.To determine which pixel can be used as OD-center, again a running window has to beapplied. Again the size of this window, W = M ×M is equal to 80 × 80. Each pixel is
15

assigned the mean value within the running window placed with its center on the currentpixel.
p(i, j) = meanW = hW (3.3)
Where h represents the intensity variance within the pixel’s region (equation 3.2). Thepixel (i, j) with the highest value p(i, j) in the resulting image is now selected as the centerof the optic disc.
3.2.2 Method implementation
In order to process the image without changing the colour information in the image we canuse the colour space defined by hue, saturation and intensity (HSI). In HSI colour spacethe colour components H and S are separated from the intensity information I. Imageprocessing can be performed on the intensity plane I and then the colour information canbe reintroduced which will not be affected. Before contrast enhancement of the intensityplane, it has to be blurred to remove noise from the image (otherwise the noise is enhanced).To perform the blurring the background is filled with the mean intensity value of the ROIand then a 2D Gaussian smoothing filter is applied with σ = 2.0.
The contrast enhancement uses a running window of size 49×49. The running windowis placed with its center on each pixel within the ROI. When the window contains pixelsbelonging to the background of the image, then these pixels are set to zero and the normal-ization factor of the window is reduced. The local contrast enhancement is performed asdescribed in paragraph 3.2.1. After the enhancement of the intensity-image the HSI-imageis converted back to a RGB-image. See figure 3.6 for the result of this local contrast en-hancement, note that the effect is similar to that of figure 3.5. The ROI of the RGB-imageis shrunk with ten pixels, because the outer pixels are often noise pixels.
For the localization of the optic disc the procedure is followed as mentioned in 3.2.1.Thus a running window of size 80×80 is applied on the image, once to determine the vari-ance image and once to determine the mean values of the variance image. Also undefinedpixel values within the running window are set to zero and the normalization factor of thewindow is reduced. Calculating variance values using intensity values ranging from 0 to 255often result in extremely large values, therefore the intensity-image is first normalized toan image with grayvalues ranging from 0 to 1. Finally the maximum value of the resultingimage (the mean variance image) is chosen as the OD-center. For a result of the processmentioned above see figure 3.7. The OD-location is indicated with a white cross.
16

Figure 3.5: Contrast enhancement of the intensity plane of the fundus image by Sinthanayothin.Left: The fundus image before contrast enhancement. Right: The fundus image after contrastenhancement. [1]
Figure 3.6: Contrast enhancement of the intensity plane of the fundus image. Left: The fundusimage before contrast enhancement. Right: The fundus image after contrast enhancement.
(a) contrast enhanced in-tensity image
(b) variance image
(c) mean variance image (d) detected optic disc
Figure 3.7: The resulting images during the variance based OD-detection.
17

3.3 Method based on template matching
3.3.1 Literature description
Osareh et al.[2] propose a template-based OD-detection. This method uses a colour nor-malization of the fundus image described in an earlier paper of Osareh et al.[12]. Thetemplate-based OD-detection method assumes the optic disc to be approximately circularand consisting of bright pixels. At first the colour images are normalized and then theintensity components from the HSI space are used to create a template and to perform thetemplate matching.
The normalization of the colour fundus images is performed by applying histogramspecification as described in [13] on each colour plane (R,G and B). Histogram specificationrequires one image specifying the preferred histogram of the colour plane. The histogramof this image is used to approximate the new histogram of the image to normalize, this waythe appearance of the normalized image approaches the appearance of the model image.
The template is created by averaging the OD-regions, of size 110× 110 pixels with theoptic disc in the center of this area, of twenty-five different intensity-images. The estimatedlocation of the optic disc is found by matching the template with the fundus image.
3.3.2 Method implementation
To perform the normalization of the colour images a reference image is selected resemblingthe reference image used in the literature. The chosen reference image, the image beforehistogram specification and the image after histogram specification are shown in figure 3.8.
For the creation of the template, twenty-five images other than the ones in the test setwere selected.
Twelve of these images were left-eye images and thirteen images were selected fromthe right eye. These images are also colour-normalized and the area of 110 × 110 pixelsincluding the centered optic disc are selected. The final template contains for each pixel theaverage intensity of the same pixels in these twenty-five areas. Finally a running window ofsize 110×110 is applied on the intensity-plane of the colour-normalized image and for eachnew position of the running window the correlation between the running window and thetemplate is calculated. The pixel with the highest correlation is selected as the location ofthe OD-center. A result of the OD-detection with the use of template matching is shownin figure 3.9. The found OD-location is the position with the highest correlation betweenthe template 3.9(c) and the subimage at that location. Again this location is indicatedwith a white cross.
18

(a) reference image (b) image before histogram spec-ification
(c) image after histogram specifi-cation
Figure 3.8: Result of histogram specification with the selected reference image.
(a) normalized image (b) localization of the optic disc (c) the template
Figure 3.9: A result of OD-localization with the use of template matching.
3.4 Method based on the largest object
3.4.1 Literature description
In an article of Walter et al.[3] an OD-localization method is proposed that applies athreshold to obtain pixels with high intensity values and selects the center of the largestobject as the OD-center. The detection of the optic disc is performed on the intensitycomponent from the HSI space. In the intensity image the optic disc is assumed to bethe largest brightest part of the image. A simple threshold is applied to obtain a binaryimage containing parts of the optic disc and perhaps other bright appearing pathologieslike exudates. The largest connected object within the thresholded image is expected tobe a part of the optic disc. The center of this object is selected as the center of the opticdisc.
3.4.2 Method implementation
To create the binary image from the intensity image a certain threshold must be set. Nospecific information about this threshold is known, to determine the threshold an idea fromLi et al.[14] is used. They propose to select the brightest two percent of the image pixelsto determine the threshold. Therefore a histogram is created of the intensity image andthe threshold is set to capture circa two percent of the pixels. The selected threshold isused to create the binary image.
The next step is to determine the various objects appearing in the binary image. Aconnected component algorithm is applied to determine which pixels belong to the same
19

component. This algorithm finds binary 8-connected objects in the image.Finally the object that holds the most pixels is selected and its center is selected as the
center of the optic disc. The binary image and the image with the found OD-location areshown in figure 3.10.
(a) original image (b) binary image with highest 2%intensities
(c) image with the marked OD-location
Figure 3.10: A result of OD-localization by taking the center of the largest connected object.
3.5 Method based on the Hough transform
This section describes the Hough transform technique used to localize the optic disc. Twopractical implementations are described: The Hough transform following the descriptionin the literature and an alternative implementation.
3.5.1 Literature description
Barrett et al.[4] propose applying a Hough transform in order to locate the optic disc.The Hough transform technique is able to find geometric shapes in an image. Objects ofgeometric shapes may be detected by converting the equation of the object into a Houghspace parameter equation. For example, a line and a circle can be represented in Houghspace by:
• line: xicosθ + yisinθ = ρ
• circle: (xi − a)2 + (yi − b)2 = c2
The line has two parameters in Hough space, the angle θ and length ρ of the line. On theother hand the circle has three parameters in Hough space, the center (a, b) and the radiusc of the circle. The optic disc has an approximately circular shape, therefore the Houghtransform can be used to detect the optic disc. With the optic disc radius fixed in Houghparameter space, the search for a circular object becomes a two-dimensional problem.
This method finds the circular shape with fixed radius in a thresholded edge image ofthe fundus. To detect edges of all possible orientations at each pixel in an image compassedge detection with a Sobel kernel is applied. The maximal response of the Sobel kernelfor each orientation is retained. On this edge map of the retinal surface a single thresholdis applied to obtain a binary edge map.
Finally the Hough transform technique is applied to the edge pixels in the edge map toaccumulate evidence of circles with fixed radius c in the image. The circle with the highestmagnitude of evidence is chosen as the optic disc.
20

3.5.2 Method implementation - conventional
To create a binary edge map a different technique than the compass edge detection withSobel kernel is used. The implemented method uses a Gaussian derivative, with σ = 1.0,to obtain edges in the x-direction and edges in the y-direction. Then the magnitude of theedges is calculated at each pixel (i, j):
mag(i, j) =√
(Xderiv2(i,j) + Y deriv2
(i,j))
To remove the strong magnitude of the edges of the ROI boundary, the mask image isshrunk and multiplied with the magnitude image. In most of the images a constantthreshold value will result in a useful binary edge map. However in some images thefixed threshold leads to an edge map with too little or too many edges. To make surethat a binary edge map is available to perform the Hough transform technique on, a per-centage of the edge pixels is selected. A histogram of the magnitude image is created andapproximately five percent of the highest magnitude pixels is selected. The selected pixelsfrom the magnitude image are the strongest edge pixels and these pixels will be used inthe Hough transform technique. To give an impression of the detection of the strongestedge pixels the various result images are included in figure 3.11
(a) magnitude image createdfrom the derivative images
(b) magnitude image multipliedby shrunken mask image
(c) the five percent strongest edgepixels
Figure 3.11: Detection of the strongest edge pixels in a fundus image.
21

Figure 3.12: For anedge pixel(x) the pix-els in the accumulatorwith distance equal tothe fixed radius(+) areincreased.
Finally the binary edge image is used within the Hough trans-form technique to accumulate evidence of optic disc sized circlesin the image. To capture different sized optic discs, various radiiare used within different accumulations. For instance the radiusof the circle is set to 40 pixels, then this circle is placed with itscenter on each edge pixel and the accumulator is increased foreach circle point. A circle with the radius equal to 40 consists ofmore points than a smaller circle. Increasing the accumulator with1/#circlepoints results in normalized accumulators. This wayan accumulator value is equal to #fitcirclepoints/#circlepoints.The maximal value an accumulator can have is equal to one, thisis the case when all circle points are placed on edges. Figure 3.12shows how circle information is gathered and stored in the accu-mulator.
This method creates an accumulator for circles of various radii, to capture the differentsized optic discs. From all accumulators only the one point with the highest evidencevalue is selected. This point determines the OD-center and the accumulator from whichthis point was selected determines the radius of the optic disc. The result of the methodis included in figure 3.13, for this input image the selected point was selected from theaccumulator indicating a radius of 36 pixels.
(a) original image (b) accumulator for a ra-dius of 36 pixels
(c) image with the marked opticdisc size and location
Figure 3.13: A result of optic disc size and localization by taking the highest value of all accu-mulators.
3.5.3 method implementation - alternative
Instead of applying the Hough transform on the binary edge map, it is also possible toapply the Hough transform directly on the x and y derivative images. These imagesare Gaussian derivative images, with σ = 1.0. This method does not throw away mostof the edge information which makes it more reliable, but more important is the factthat the direction of intensity changes can be taken into account. As mentioned earlier,we are looking for a circular bright region. By just taking the edges of this region, theinformation about the intensity changes got lost. In fact we are looking for a circle inthe image depending on strong edges and with brighter pixels inside these strong edges incomparison with the pixels outside the strong edges. To illustrate the difference betweenthe methods figure 3.14 is included.
22

(a) image containingtwo circles with thesame radius
(b) edge image (c) x-derivative image (d) y-derivative im-age
Figure 3.14: Difference between using the edge map of using the derivative images.
When the edgemap of the image is created, the distinction between the black and thewhite circle is lost. When we are looking for a white circle with the same radius as thewhite circle in the input image (figure 3.14(a)), the edge map will result in two possiblepositions for this circle (the two circle centers).
Knowing that we are looking for a white circle could eliminate the black circle in theinput image, when using the derivative images instead of using the edge map. The circle isdivided into four parts. For each part the combination of the pixel information, containedin the x en y derivative images, is different (figure 3.15). Take for example pixels on the
Figure 3.15: The division of the circle and its award for the x and y-derivative. +X means thebrighter a circle pixel in the x-derivative image the higher the response. -Y means the darker acircle pixel in the y-derivative image the lower the response.
circle in part 1 of figure 3.15. For the information of pixels in the x-derivative image countsthe darker the better (-X), while for the information of pixels in the y-derivative imagecounts the brighter the better (+Y). Note that pixels on the edge of the white circle infigure 3.14 the output is positively influenced, while pixels on the edge of the black circlethe output is negatively influenced. A result of this derivative approach of the Houghtransform is that we are able to look for a bright circle within the image instead of ‘just’a circle.
To apply this technique to the fundus image the derivative images must be multiplied bya shrunk mask image to remove the ROI boundary. Afterwards different radii can be used tocreate different accumulators. A circle with a larger radius accumulates more informationthan a circle with a smaller radius, therefore the accumulation’s result is normalized bydividing the result with the amount of checked pixels. Again, only the one point with thehighest evidence is selected as OD-center from all accumulators. The accumulator fromwhich the point was selected determines the optimal optic disc radius (figure 3.16).
In order to save computation time, the derivative images are down-sampled using linear
23

interpolation by a factor of 14
in the x-direction as well as the y-direction. Also, in thisimplementation, various sized circle are tried in order to capture different sized optic discs.Because the derivative images are down-sampled, the applied circles are down-sampled too.Instead of creating an accumulator for a circle of i.e. a radius of 40, a circle with a radiusof 10 used. A circle with radius equal to 40 pixels consists of a boundary of 251 pixels,while a circle with radius equal to 10 pixels consists of a 62 pixels sized boundary. For eachsingle pixel in the ROI these circle pixels are checked. Down-sampling the images reducesthe number of ROI-pixels and the amount of circle pixels, reducing the computation timesignificantly. After the determination of the optimal position and radius of the optic disccircle in the subsampled images, the results are scaled back by multiplying these resultswith factor four.
(a) x-derivative image (b) y-derivative image (c) accumulator for a ra-dius of 40 pixels
(d) original image (e) image with the marked opticdisc size and location
Figure 3.16: The derivative images of the original image are used to create accumulator images(like the one with radius=40). The highest output gives us the result of the final image.
3.6 Method based on multiple fuzzy convergences and
equalized brightness
In an article of Hoover et al.[5] a combination of a two OD-detection methods is described.The first method calculates a fuzzy convergence image of the vasculature and then appliesthe hypothesis generation (paragraph 3.7). The second method equalizes the illuminationof the image’s green plane and then applies the hypothesis generation (paragraph 3.8).The hypothesis generator returns either a location for the optic disc or no location at all.
The combined method performs the following calculations: Six binary images of thevasculature are created, each with a different scale (sparse scale to dense scale). Theseimages are created by selecting six different thresholds (t=0.3 . . . 0.8), which are applied
24

on a vessel probability map (see paragraph 3.7). On each of the six vessel images, thefuzzy convergence method is applied followed by hypothesis generation. Thus for each ofthe vessel images a hypothesis is generated, which can be either a location or no locationat all (inconclusive). When three or more of the hypotheses position the optic disc atapproximately the same location, then the average location of these conclusions determinesthe optic disc’s location. Locations are approximately the same when they lie all within adistance of each other less than the average size of the optic disc.
If the generated hypotheses do not reach consensus, then illumination equalization isapplied on the image’s green plane followed by hypothesis generation. Again the finalconclusion might be inconclusive.
The illumination equalization method followed by hypothesis generation, as well as thefuzzy convergence method followed by hypothesis generation are described as an individualmethod in the following two sections. The variables of the methods in the implementationdescription differ from the ones in the literature description.
3.7 Method based on illumination equalization with
hypothesis generation
3.7.1 Literature description
This method performs illumination equalization on the retinal image’s green plane followedby hypothesis generation. Though the method described here is part of a more complexmethod described in 3.6, this method is treated as an individual method with its ownexperimental results.
Illumination equalization
In order to locate the optic disc the assumption is made that the optic disc is the brightestfeature in the image. However, because of uneven illumination the optic disc may appeardarker than other areas of the image. To overcome this problem, illumination equalizationis applied to the image. During this process, each pixel f(i, j) in the image is adjusted asfollows:
g(i, j) = f(i, j) + m− fW (3.4)
where m is the desired average intensity (128 in an 8-bit grayscale image) and where fW
the mean intensity value of the image within a window W of size N × N represents. Inother words fW is the local average intensity. The window size N is applied when it comesclose to the border in order to capture the same number of pixels every time. Also thelocal average intensities are smoothed using the same windowing.
Hypothesis generation
The illumination equalization algorithm produces an image in which the brightness of apixel is indicative of the presence of the optic disc. A hypothesis about the location of theoptic disc has to be generated. In order to do this, the brightest 1500 pixels are selected.These pixels are grouped into regions using the eight-connected component analysis. Usingbasic image processing techniques regions are grouped when they are within five pixels ofeach other.
25

Fisher’s linear discriminant is applied with the obtained region. The regions are sortedby size and two sets (A and B) containing regions are used. Initially set A containsthe largest region and set B all other regions. For this partition the discriminant Fp iscomputed.
Fp =(µA − µB)2
σ2A + σ2
B
(3.5)
where µA represents the mean size of the regions in set A and σA represents the standarddeviation of the sizes in set A. After the calculation of the discriminant of the initialpartition, the largest region from set B is moved to set A and again the discriminantFp is calculated. This continues iteratively until set B contains one region (and set Acontains all but one region). If the discriminant value of one of the partitions is higherthan the discriminant value of the initial partition, the result of the OD-detection methodis said to be inconclusive (no OD-location obtained). But if the discriminant value of theinitial partition is the highest value of all tried partitions then the single region in set A issupposed to be the optic disc. The centroid of this region is selected as the center of theoptic disc.
3.7.2 Method implementation
Illumination equalization
To implement the illumination equalization the green plane of the retinal fundus image isselected. The illumination equalization formula (equation 3.4) is applied for each pixel.The implementation differs, because the size of the running window is not changed whenapproaching the border. The running window is of size 40× 40 and only pixels within theROI are being used to calculate the local average intensity (fW ). In other words the amountof pixels used to calculate the local average intensity is less when the running windowoverlaps background pixels. Despite this difference, the illumination equalization seemsto have a similar effect on the image. An example of illumination equalization appliedon an image with uneven illumination is shown in figure 3.17. Before the illuminationequalization there are many bright pixels that do not belong to the optic disc. However,after illumination equalization the intensities of these pixels are decreased and most of thebrightest pixels belong to the optic disc. Less pixels are used at the border to determinenew pixel values. Therefore the chances of erroneous pixel values close to the border arehigher. To reduce this effect the ROI is shrunk with five pixels. This deviation fromthe original algorithm does not seem to have a detrimental effect on the final performance.Comparing the illumination equalized images from literature and practice indicates whetherthe deviated algorithm performs well. In figure 3.18 these resulting images are shown, andtheir appearances look very similar.
Hypothesis generation
The hypothesis generation is applied on the highest intensity values of the input image(here the illumination equalized image). In the literature the highest 1500 intensity valuedpixels are selected in an image of size 700 × 605. The percentage p of the selected pixelsequals: p = 100× 1500
700×605= 0.35. This percentage is used in the implementation to select
an amount of the brightest pixels from the input image, resulting in a binary image inwhich the p percent pixels are white and the other pixels are black. Groups of pixels that
26

(a) before illuminationequalization
(b) after illuminationequalization
(c) after shrinking theROI
Figure 3.17: This figure shows the image before and after applying illumination equalization andthe final image.
(a) before illuminationequalization
(b) after illuminationequalization in literature
(c) after illuminationequalization in imple-mentation
Figure 3.18: This figure shows the similarity between the literature result and the implementedresult of illumination equalization.
are located close to each other are merged by applying a morphological dilation operationusing a 6 × 6 structuring element. This way small gaps caused by vessels are bridged.On the resulting image the eight-connected component analysis is applied resulting in acollection of regions. Finally the Fisher’s linear discriminant (as mentioned in paragraph3.7.1) to determine if the largest region can be selected as the optic disc.
Results are included in figure 3.19. In this figure you will see the original image followedby the result after applying the illumination equalization on the green plane of the originalimage. The pixels with highest intensities are selected from the illumination equalizedimage followed by a dilation operation. This results in an image with a few regions. Theseregions are evaluated according the Fisher’s linear discriminant. In this case there are twolarge regions with approximately the same size which makes it impossible to select oneregion as the optic disc with an inconclusive hypothesis as a result.
3.8 Method based on fuzzy convergence with hypoth-
esis generation
3.8.1 Literature description
This method performs fuzzy convergence on the retinal vasculature followed by hypothesisgeneration. Though the method described here is part of a more complex method describedin 3.6, this method is treated as an individual method with its own experimental results.
27

(a) after illuminationequalization
(b) regions after dilation (c) no location marked.
Figure 3.19: This figure shows results of the illumination equalization method followed by hy-pothesis generation.
This method identifies the optic nerve as the focal point of the blood vessel network.In order to determine the focal point the retinal vessel network must be detected. Thenthe fuzzy convergence is applied on these vessels, followed by a hypothesis generation todraw a conclusion whether the found location can be determined as OD-location or not.
Creating a binary segmentation of vessels
In order to create a binary segmentation of the vessel network Hoover applies a “piecewisethreshold probing method of a matched filter response”[15]. By adjusting the parametersof this vessel segmentation method, different scaled binary vessel segmentations can beproduced.
Fuzzy convergence
The fuzzy convergence is described as followed. First the input image, which is a binaryvessel image, should be thinned. The thinning method must result in a skeleton image withline thickness of exactly one pixel. Secondly, all branchpoints are erased: Pixels with morethan two neighbours are labeled as background. The result of erasing the branchpoints is animage with linesegments with only one beginpoint and one endpoint. These linesegmentsare extended with R pixels (R = 15) at the beginpoint and endpoint along the directiondetermined by these points. The distance between the begin and endpoint is now increasedwith 2R pixels. Each extended linesegment is modeled with a fuzzy segment (see[15] formore details). The convergence image is a map of votes: each pixel in the convergenceimage is assigned a value corresponding to the amount of fuzzy segments the pixel iscontained in. The convergence image is smoothed to identify the center of the peak ofconvergences. Smoothing is performed by applying a 11× 11 mean filter. The higher thevote for a certain location, the more vessels will converge at that location. A locationwhere a lot of vessels converge to, gives an indication of the optic nerve. After all the opticnerve is the origin of the vessels.
Hypothesis generation
The fuzzy convergence method produces an image in which the brightness of a pixel gives anindication of the optic nerve presence. The hypothesis generation is applied as mentioned
28

(a) the vessel probabilitymap
(b) after threshold(t = 0.5)
(c) after fuzzy conver-gence
(d) after smoothing
(e) regions after dilation (f) marked OD-location after hy-pothesis generation
Figure 3.20: This figure shows results of the method fuzzy convergence followed by hypothesisgeneration.
earlier in section 3.7.1. The final result of the fuzzy convergence method followed byhypothesis generation is either the optic disc location or an inconclusive decision.
3.8.2 Method implementation
The method proposed by Hoover is implemented with a different vessel segmentation tech-nique. Instead of using the vessel segmentation of Hoover, the vessel segmentation de-scribed by Niemeijer et al.[16] was used. This pixel classification based method results in aprobability map in which the value of each pixel indicates the probability of it being a ves-sel pixel. Applying a threshold on this probability map will return a binary segmentationof the vasculature. Binary vessel images with different scales can be obtained by applyinga different threshold on the probability map. In general a good binary segmentation ofthe vasculature is obtained, if a threshold of t = 0.5 is applied on the probability map.The vessel probability map is created in such way that the threshold t = 0.5 results in theoptimal segmentation of the vasculature. The fuzzy convergence is performed using lineextensions of 15 pixels (R = 15). In order to smooth the image a 11 × 11 mean filter isapplied on the image. The hypothesis generation applied on the smoothed convergenceimage is performed according the implementation description of the hypothesis generation(section 3.7). The stepwise results of this method are included in figure 3.20.
29

3.9 Method based on pyramidal decomposition with
Hausdorff-based template matching
3.9.1 Literature
Lalonde et al.[6] propose an OD detection method based on pyramidal decompositionand Hausdorff-based template matching. This method is applied to the green plane ofthe image. A resolution pyramid is created using a simple Haar-based discrete wavelettransform. The high-pass and low-pass filters used in the wavelet transform are [1,-1] en[1,1]. At the fifth level of the resolution pyramid, the small bright pixels belonging to e.g.exudates have disappeared. Pixels belonging to the optic disc are, however, still visible.Expecting the optic disc to be a bright circular object in the fundus image, the optic disccandidates are the pixels with a high intensity value compared to the mean intensity valueof the ROI in the low resolution image. Each candidate pixel in the image at the fifth levelof the pyramid corresponds to a region of many pixels in the original image. To pinpointone pixel within such a region as a candidate OD-center, the original image is smoothedand the brightest pixel within the region is selected as a candidate.
For each candidate a confidence value CV r is calculated. This value represents thechance that the candidate is the optic disc. At the candidate OD-location a circle with afixed radius and a rectangle slightly larger then the bounding box of the circle is placed.Then CV r is calculated as the ratio of the average intensity of pixels inside the circle andthe average intensity of pixels within the rectangle but outside the circle. For the candidateOD-locations the confidence values are calculated. A higher confidence value CV r for acandidate means a higher chance of being the optic disc. The ten candidates with thehighest confidence values are selected for further analysis.
The candidate regions are aggregated resulting in a few regions. Within each regionCanny edge detection is applied. To capture as many edges as possible the high thresholdfor the edge detection is set to H = 2 and the low threshold to L = 1. Next, the highthreshold is reassigned to capture ten percent of the strongest edges found initially. Thesestrong edges are removed from the initial edge map and a threshold is selected accordingthe Rayleigh-based threshold estimation. This threshold is used to create the final edgemap.
On the edge map regions a circular template with different radii is matched. Thedistance measure used within this template matching is the Hausdorff distance. Thismethod looks for the best fit of the circular template on the edge map regions, accordingthe Hausdorff distance. The Hausdorff distance provides an indication of the degree ofmismatch between two sets of points. In this case the Hausdorff distance returns thehighest distance from all template points to the nearest edge map points. If the templatehas a perfect fit on the edge map this distance measure returns zero.
When the Hausdorff distance between a template and the edge map region is found tobe lower than a fixed threshold, then a percentage of the template match is calculated. Thispercentage is the amount of overlapping template pixels divided by the total amount oftemplate pixels. This percentage is denoted by the confidence value CV h. If this confidencevalue is higher than a certain threshold the found location is a potential OD-location andthe radius of the circular template is the potential optic disc radius.
For all potential OD-locations found by the Hausdorff-based template matching a con-fidence value CV h is available and the confidence value CV r is calculated as described
30

earlier.These confidence values are combined into a single confidence value CV g following the
Dempster-Shafer theory.
CV g = CV hCV r + CV h(1− CV r) + CV r(1− CV h)
The optic disc candidate with the highest confidence value CV g is selected as the OD-centerand the template radius is selected as its radius.
3.9.2 Method implementation
The method as it is implemented starts with the green plane of the RGB-image and con-structs the pyramid as described in the literature. The images at the fourth and fifth levelof the pyramid are included in figure 3.21. From the original image a smoothed version iscreated by applying a 2D Gaussian smoothing filter (with σ = 2.0) on the original image.At the lowest resolution level (fifth level) the brightest intensity pixels, compared to themean intensity of the ROI, are selected. Each candidate pixel at the fifth level correspondsto a region in the smoothed image. Within this smoothed region the brightest pixel isselected as a potential OD-center.
(a) green plane image (b) image at the fourthlevel
(c) image at the fifth level (d) possible OD-center lo-cations (based on CV r)
Figure 3.21: This figure shows different levels of the image pyramid and the selected OD-regions.
At each of the potential OD-centers a circle is centered with fixed radius (mean radius≈ 40). Around the fixed sized circle a neighborhood, slightly larger than the bounding boxof the circle (5 pixels), is selected. For each potential OD-center a confidence value CV ris calculated with the following formula.
CV r = 1−1
nneighborhood
∑∀i∈neighborhood f(i)
1ncircle
∑∀i∈circle f(i)
Where f(i) is the intensity of a pixel in the original image. As a result the CV r has avalue within the range [−∞,1]. A value closer to one means that the average intensityof the circle is brighter with regard to the average intensity of its neighborhood. Whenthe average intensity inside the circle is equal to the average of its neighborhood than theCV r will be zero. A negative CV r value will occur if the neighborhood is brighter thanthe inner circle, but these values will be discarded. The ROI of the images of Lalondecontain circa 25% less pixels at the lowest resolution than the images used in this thesis.So, instead of retaining the ten potential OD-centers with the highest confidence values forfurther analysis, thirteen potential OD-centers are retained.
31

The thirteen pixels at the lowest resolution determine thirteen regions in the originalimage. A connected component algorithm is applied on the thirteen pixels, to determinewhich pixels belong to the same component. The algorithm finds binary 8-connectedobjects in the image. The found connected components determines a mask image of a fewregions in the original image where the OD-center might be (figure 3.21 ).
The implemented method applies Canny edge detection followed by the Rayleigh-basedthreshold estimation as described in the literature on the entire image, resulting in a finaledge map. A distance transform of the edge map is created (figure 3.22). The distancetransform gives each image pixel a value
equal to the distance of that pixel to the nearest object pixel (here the objects areedges). On the distance transformed edge map a template circle with a fixed radius ismatched in the regions selected by the pyramidal decomposition. The template circle isplaced with its center on a pixel, then the pixel is assigned a value equal to the maximumof all template pixels in the distance transformed image. In other words, the distancetransform provides us with the minimal distances from template pixels to edge pixels, andthen we select the maximal distance of all template pixels.
For each template circle, with a different radius, a resulting Hausdorff distance image(HD-image) is created. Instead of selecting pixels below a certain threshold for furtheranalysis, the lowest ten percent pixels of each HD-image are selected for further analysis.Each of these pixels is a OD-center candidate. These points are stored with its coordinatesand template radius. Then for each point the CV r is calculated, this time with thetemplate radius, followed by a calculation of CV h, also with the template radius. These twoconfidence values are combined into a single confidence value CV g following the Dempster-Shafer theory as described in the literature. The template circle, that fits best on the edgemap and has a higher average intensity inside this circle than its surroundings, has a higherCV g than a template circle without these properties. The center of the template circlewith the highest CV g is selected as the optic disc.
(a) distance transformededge map
(b) Hausdorff-based tem-plate(r=30) matching onthe selected regions
(c) marked OD-location, the loca-tion with the highest CV g
Figure 3.22: This figure shows results of the Hausdorff-based template matching.
32

Chapter 4
Automatic OD-detectionnew methods
This chapter describes several new OD-detection methods. Some methods are a combina-tion of two existing methods. For each of the automatic OD-detection methods a practicalimplementation description is given.
4.1 Method based on the binary vasculature with the
Hough transform
The optic disc is often a bright circular shape at the convergence of the vasculature. Thismethod assumes that the OD-center lies close to a vessel of the vasculature. The Houghtransform (alternative) described in section 3.5.3 is used to determine the size and locationof the optic disc. However, this time the Hough transform is only applied on and close tothe vasculature. In order to determine the potential OD-locations the segmentation of thevasculature is required. On the vessel probability map of Niemeijer et al.[16] a threshold(t = 0.5) is applied to obtain a binary vessel segmentation. Because there is not always avessel exactly at the center of the optic disc the vasculature is dilated with a squared 5× 5kernel. Note that the dilation increases the amount of potential OD-locations.
The Hough transform looks for strong intensity changes. However, the intensity changesfrom vessel to retinal background is often larger than the intensity changes from optic discto retinal background. Placing a circle between vessels can result in a higher Houghtransform result, than placing the same circle around the actual optic disc. To ensurethe Hough transform not to fit on vessels, the intensity changes of the dilated vasculaturepixels are not taken into account. Results of this method are included in figure 4.1.
4.2 Method based on fuzzy convergence with the Hough
transform
The optic disc is often a bright circular shape at the convergence of the vasculature. Theresult of fuzzy convergence often results in an image in which the optic disc is one of thehighest convergence regions. However the hypothesis generation assumes that the largestregion is the optic disc or draws no conclusion about the location of the optic disc. Inthis method the brightest p percent (p = 0.35) of the convergence image are selected (as
33

(a) vasculature(t = 0.5) (b) dilated vasculature (c) the accumulated in-formation in case of ves-sels.
(d) accumulator for a cir-cle with radius 40
(e) marked OD-location
Figure 4.1: This figure shows results of applying the Hough transform on the vasculature.
described in section 3.7.2). Dilation with a square structure element of 6× 6 is performedon these brightest pixels to overcome gaps created by small vessel. The resulting pixelsare used as potential OD-centers. On these potential OD-centers the Hough transform(alternative, section 3.5.3) is applied with different radii. This way we do not discriminatesmaller regions of convergence from larger regions of convergence. This method takes thefollowing retina properties into account: The Hough transform looks for a circle on edgesfor which the intensity increases toward the circle’s center, while the fuzzy convergencemethod takes the vesselness into account. Results of this method are included in figure 4.2
(a) potential OD-centersafter fuzzy convergence
(b) accumulator for a cir-cle with radius 40
(c) marked OD-location
Figure 4.2: This figure shows results of the fuzzy convergence followed by the Hough transform.
34

4.3 Method based on illumination equalization with
pyramidal decomposition
This method requires the optic disc to be the largest area of bright pixels in the green planeof the fundus image. However, because of uneven illumination large areas of bright pixelsmay occur close to the image’s borders. Most of this uneven illumination can be removedusing illumination equalization. The illumination equalization is performed according themethod described in paragraph 3.7.2. Afterwards, the optic disc should consist of pixelsthat are slightly brighter than other parts of the image.
Next, a resolution pyramid of the illumination equalized image is created using a simpleHaar-based discrete wavelet transform. The high-pass and low-pass filters used in thewavelet transform are [1,-1] en [1,1] (see section 3.9). At the fifth level of the resolutionpyramid, the small bright pixels belonging to exudates have disappeared, but the optic discis still visible as a few bright pixels. The brightest pixel at the fifth level of the resolutionpyramid is selected as the optic disc area in the original image. The center of this opticdisc area is selected as the center of the optic disc.
4.4 Method based on pyramidal decomposition of both
the vasculature and the green plane
A typical optic disc looks like a circular shaped area with the optic nerve located somewhatmore to one side of the optic disc, depending on whether one deals with the left eye or theright eye. One half of the optic disc is mostly covered with vessels, while the other half ofthe optic disc contains many bright pixels. Considering a left eye image: the left half iscovered with vessels, the right half contains many bright pixels and the macula is locatedon the right of the optic disc (figure 4.3(a)). Considering a right eye image: the right halfis covered with vessels, the left half contains many bright pixels and the macula is locatedon the left of the optic disc (figure 4.3(b)).
(a) Optic disc left eye (b) Optic disc right eye
Figure 4.3: Two optic discs showing the typical appearance
The algorithm uses the green plane image, the mask image and the vessel probabilitymap and performs the following steps:
1. Equalize the illumination of the green plane image (see paragraph 3.7.2).
2. Shrink the mask image with five pixels.
35

3. Subtract the thresholded vessel probability map (threshold=0.5) from the mask image(figure 4.4(b)).
4. Make sure the background of the vessel probability map equals zero (figure 4.4(a)).
5. Replace all non-mask pixels of the image from step one with the mean value of all maskpixels (step 3) of the illumination equalized image (step 1). (figure 4.4(c))
6. Normalize the image from step five.Now both the vessel image and the green plane image contain values within the domain[0,1].
7. Create a resolution pyramid for both the vessel and the green plane image (as in section3.9).
8. Retrieve the images at the fifth level of the pyramid: pyrVessel and pyrGreen.
9. Normalize the images pyrVessel and pyrGreen.Now both the pyrVessel image and the pyrGreen image contain values within the domain[0,1]. (figures 4.4(d) and 4.4(e))
10. Create a left eye image in which each pixel (x, y) = (x, y)εpyrVessel+(x + 1, y)εpyrGreen.(figure 4.4(f))
11. Create a right eye image in which each pixel (x, y) = (x, y)εpyrGreen+(x+1, y)εpyrVessel.(figure 4.4(g))
Both the resulting left eye and right eye images contain information about the mutualinformation of the vessel image and the green plane image. The location of the highestvalue in both the images is selected (xod, yod). This gives also an indication about the typeof eye (left or right) that is currently examined. The area that corresponds to the highestvalue determines the location of half the optic disc:
• The half covered with vessels if the highest value is located in the left eye image.
• The half containing bright pixels if the highest value is located in the right eye image.
The area to the right of the highest value determines the remaining half of the optic disc.The selected location should also be scaled back to a location in the original image, becausethe images at the fifth level of the pyramid have a size of 1/25 of the original image. Beforescaling, the (xod, yod) is translated with (1, 0.5) to center the y-direction and to positionthe
x-direction between xod and its right neighbor. The final OD-location is calculated asfollows:
x′od = (xod + 1) ∗ 25
y′od = (yod + 0.5) ∗ 25
36

(a) vessel probability map (b) mask image (c) green plane image
(d) pyrVessel (e) pyrGreen (f) result left eye (g) result right eye
(h) original image (i) image with the marked OD-location
Figure 4.4: Images during the process of the algorithm.
4.5 Method based on the branch with the most vessels
The vasculature in the retinal image consists of many vessels of various lengths and variousthicknesses. This method turns the vessel probability map into a network of vessels andbranches. In this network information is stored about the connections between vessels andbranches. By means of this network, the branch with most vessels connected to it can beselected. The selected branch is used to determine the optic disc.
4.5.1 Construction of the vessel-branch network
To construct the vessel-branch network a binary vessel image is required. Important for thesuccess of this method is that vessels that are also connected in the original image are alsoconnected in the binary image. Because the pixel classification method classifies individualpixels and doesn’t take classification information of neighboring pixels into account, con-nectedness is not guaranteed. To increase the connectedness of the vessel network, whilelimiting the number of detected spurious binary objects, a hysteresis threshold is appliedinstead of a fixed threshold of t = 0.5. A vessel is defined as the vessel-segment obtained
37

by thinning the vasculature and removing the branchpoints. The vessel-branch network iscreated as follows:
1. Create binary map. Apply a hysteresis threshold on the vessel probability map, with highthreshold ht = 0.4 and low threshold lt = 0.2. These thresholds reduces the false negativevessel pixels and herewith increases the chances of retrieving the entire vasculature.
2. Thin the image. For instance, using the thinning algorithm proposed by David Eberly[17].
3. Determine branchpoints and vesselpoints. For each skeleton pixel the amount of neighborskeleton pixels is determined. If the amount of neighbors is smaller than three, then thepixel is added to the vessel-image. Otherwise the pixel is added to the branch-image.
4. Detection of the vessels. A vessel is a collection of points, starting at a point with onlyone neighbor and ending at a point with only one neighbor. If a beginpoint of a vesselis detected within the vessel-image, then the vessel is traced toward its endpoint. Thebeginpoint and the endpoint are marked to avoid tracing a vessel twice.
5. Removal of the small vessels. Vessels with an amount of points less than a certain thresholdS are excluded as vessel and are turned into potential branches by removing the points fromthe vessel-image and adding them to the branch-image.
6. Detection of the branches. A branch is a collection of non-vessel points, with an amount ofvessels connected to it. The branches are detected by applying eight-connected componentanalysis on the branch-image.
7. Detection of the connections. A connection determines to which branches the beginpointand the endpoint of a vessel are connected. For each vessel we have a connection. In orderto determine the connections, an image is created in which each pixel represents the branchit belongs to. For each vessel-ending the eight neighbors in this image are checked. If oneof the neighbours is a branch, then the endpoint of a vessel is connected to that branchby adding the vessel to the branch and storing this information in the connection. If avessel is not connected to a branch at all, then it is removed as a vessel if its size is smallerthan a fixed threshold T . Branches without any vessel connected to it are removed as abranch. (see figure 4.5) These last two operations help suppressing false positive vesselpixels introduced by the a hysteresis threshold.
Figure 4.5: The creation of a vessel connection: Branch b1 and branch b3 are selected in com-bination with the vessel v as a connection, branch b2 is removed due to the lack of connectedvessels.
The threshold S which determines whether a segment of the skeleton belongs to thevessels or to the branches is set to a value of ten pixels (S = 15). This threshold is chosento be able to determine certain vessel properties, like thickness and orientation for whichthe vessel size should exceed the minimum of thirteen pixels. On the other hand, the
38

threshold should not be much higher than fifteen pixels, because then the vessel-branchnetwork loses a lot of vessel segments. A vessel is divided into several segments dependingon the amount of branches it has. The distance between two branches varies significantlyand it is not desirable to have many vessel segments labeled as branch.
The threshold T that determines which stand-alone vessels should be retained is set toa value of thirty pixels (T = 30). Due to bad image quality (resulting in a vessel probabilitymap with gaps) some vessels will become separated from the network. When this happens,the network loses important vessel data if these vessels are not retained. On the otherhand, false positive vessel pixels and even false positive vessel structures are introducedby a hysteresis threshold. The threshold value should be high enough to eliminate falsepositive vessel segments, but not to high in order to retain the separated vessels.
Each vessel of the vessel-branch network consists only of center points, obtained fromthe skeleton image, of the actual vessel. A branch consists of a collection of skeletonpixels with more than two neighbors and pixels of vessels that were to small. The binaryvasculature, the skeleton of the vasculature and the result of the vessel-branch network areincluded in figure 4.6.
Figure 4.6: Left: The binary vessel map. Right: Overlay of the vessel-branch network and theoriginal image (white = vessels, black = branches).
4.5.2 Selection of the branch with the most vessels
The constructed vessel-branch network can be used to find the optic disc in many ways.A very simple algorithm is the selection of the branch with most vessels. For each branchof the network the amount of vessels connected to it is stored. The optic disc containsthe optic nerve from which a few main vessels split up into many smaller vessels whichspread around the retina. Vessel segments in this area of the retina are often small and aretherefore often combined into one large branch of the network with many vessel objectsconnected to it. An increasing amount of vessel connections of a branch also increases theprobability of the branch being located in the optic disc area. The algorithm is performedas follows (see also figure 4.7):
39

1. Select the branch with the most vessel connections. If there are several brancheswith the highest number of vessel connections, then the branch with the most branchpixels is selected.
2. Take the bounding box of the branch with the most vessel connections.
3. Select the center of the bounding box as the OD-center.
Figure 4.7: Left: The amount of vessels connected to each branch. Right: The bounding box ofthe best branch and the determination of the OD-center.
4.6 Method based on path convergence with the Hough
transform
The optic nerve is the location from which vessels spread around the retina. This algorithmtakes the vessels representing the endings of the vasculature in the retinal image, and tracesback to the optic nerve. The vasculature used in this algorithm is the vessel-branch networkobtained as described in paragraph 4.5.1. The algorithm creates lists of vessels representingpaths within the vasculature. For all paths beginning with the same vessel only the pathwith the largest number of vessel pixels is retained, or the longest paths if there are morepaths with the largest number of vessel pixels. The endpoints of all paths represents adegree of convergence, the more path-endings located within a certain area, the higher theodds of that area being the optic disc. Finally, the Hough transform is applied within theareas with high degree of path convergence.
4.6.1 Finding suitable paths
In order to create all possible paths, all vessels in the vessel-branch network are checkedexactly once. If a vessel is an ending of the network, then the search for paths beginningwith this vessels starts. Thus, each path starts with a vessel that has one of the followingproperties (see also figure 4.8):
40

Figure 4.8: The three possible starting vessels for the pathtracing algorithm.
• The vessel is not connected to a branch.
• The vessel is connected with one ending to a branch.
• The vessel is connected with both endings to branches, of which at least one branch has noother vessels connected to it.
If a vessel is not connected to another vessel with a branch, than the vessel is included as apath twice, once for each ending. The recursive function that traces the vasculature keepstrack of the following information:
• The vessels contained in the path so far.
• The size of the path equal to the amount of vessel points.
• The connection of the current traced vessel.
• A Boolean that determines toward which branch we should trace (the first or secondbranch).
The tracing starts with an empty vessel list, a pathsize of zero, the connection objectof a vessel representing the end of the vasculature, and whether we should trace towardthe first branch or not (trace to the second branch). The tracing algorithm performs adept-first-search as follows:
1. Initialize. The vessel of the current connection is added to the path, the size of this vesselis added to the path size, and the branch (other than the one we traced from) is selected.
2. Loop connected vessels. The vessels contained in the selected branch are potential vesselsto continue a path. Each of the vessels satisfying several properties, with respect to thecurrent vessel, will be used to continue a new path. These properties are:
• The new vessel may not be included in this path already.
• The new vessel must continue with approximately the same orientation as the orien-tation at the end of the current vessel. The absolute difference must be smaller orequal to threshold A (see figure 4.9(a)).
• The distance between the new vessel’s beginpoint and the current endpoint of thepath must be smaller than threshold D (see figure 4.9(b)).
41

Figure 4.9: Pathtracing situations starting at the left vessels. Upper left: Tracing based on theorientation. Upper right: Tracing based on the distance. Lower left: Extension-based tracing.
• The minimal point-line distance is calculated for the endpoint of the path to theinfinitely-extended line defined by the new vessel’s beginpoint and orientation. Incase the new vessel moves toward the endpoint of the path instead of away from it,then the obtained distance will be infinitely large. Then the distance is calculatedthe same way for the beginpoint of the new vessel to the line defined by the path’sendpoint and orientation. The minimal of these two new distances must be smallerthan threshold X (see figure 4.9(c)).
If a vessel fulfills these properties, then the function iterates recursively with the currentpath, the connection object of this new vessel and whether the connection is selected forits first or second branch.
3. Add new path. If the path reaches a vessel without a new branch to continue, or a branchwithout vessels fulfilling the properties, then the path is finished and added to the list ofpaths. Then the last vessel added to the path is removed and the method continues findingother paths.
The orientation of a vessel at its beginning is calculated by taking the angle in radiansfrom its fifth point to its first point. The orientation of a vessel at its ending is calculatedby taking the angle in radians from its fifth point before its ending and its endpoint. Theorientation difference between two compared vessels should be smaller or equal to A = 1
4π
radians. The remaining algorithm’s parameters where set to D = 20 and X = 8 duringthe experiments.
42

(a) endpoints of the paths (b) convergence probability map
(c) highest 1.5% intensitypixels
(d) accumulator for a ra-dius of 40 pixels
(e) image with the marked opticdisc size and location
Figure 4.10: Results of path convergence followed by the Hough transform technique.
4.6.2 Calculate convergence
When all paths are found, the convergence image can be created. Each path has a be-ginpoint and an endpoint, the endpoint of the path indicates to which branch the pathconverges. For each endpoint a filled circle with radius r = 30 is drawn. An area withmany overlapping circles indicates the optic disc presence. A median 10×10 filter is appliedand the highest 1.5% of the pixels is selected. On the selected pixels the Hough transform(alternative) is applied, resulting in a location and a radius for the optic disc.
4.7 Method based on vasculature fitting on a direc-
tional model
The OD-detection method described in this section uses the orientation of the vasculature,which can be extracted from a fundus image to locate the optic disk. The idea to usevessel orientations to locate the optic disc was first introduced by Ruggeri et al[18]. Theyused a mathematical model that described the expected vessel orientation for each pointin an image with respect to the optic disc. Then the sum of squared differences was used
43

to compare the orientations of a new vasculature with the mathematical model, resultingin the OD-location.
Starting at the optic disc, the vessels follow more or less the same divergence patternin all retinal images. Four or five main vessels move in a vertical direction out of theoptic nerve. Two of these main vessels curve away towards the macula and make surethat that part of the retina is supplied with blood, while the other main vessels divergetoward other parts of the retina. Branches of the main vessels spread around the entireretina. Branches coming out of the two main vessels near the macula converge towardthe macula. A schematic drawing of these vessel properties is shown in figure 4.11. Theautomatic OD-detection method described in this section captures these properties in adirectional model. At first the creation of the directional model is described, followed byan explanation of how a segmented vasculature is fitted on the model in order to locatethe optic disc.
Figure 4.11: A schematic drawing of the vessel orientations.
4.7.1 Construction of the directional model
In order to construct the directional model, eighty retinal images were selected from ascreening image database. None of these images is also present in the test set. Onlyimages without pathologies and with a clear vasculature are selected. The automaticpixel classification based vessel segmentation method by Niemeijer et al.[16] was used toautomatically segment the vasculature in the 80 training images. The selected retinasinclude twenty images of each of the following categories:
• macula centered left eye
• OD-centered left eye
• macula centered right eye
• OD-centered right eye
44

The vessel probability maps showing the vasculature of left eye images are mirrored inthe Y-axis. Now, all images appear to be right eye images. In all vessel probability maps,one point corresponding to the center of the optic nerve location is manually selected. Oneach of these probability maps a threshold of 0.5 is applied to obtain a binary vasculaturewith distinct vessels. The separated vessels are connected manually and wrongly classi-fied vessel segments are removed to obtain a ‘clean’ binary vasculature. For each binaryvasculature the following preparation steps are performed:
1. Thin the image. For instance, using the thinning algorithm proposed by DavidEberly[17].
2. Erase branchpoints. For each skeleton pixel the amount of connected skeleton pixelsis determined (using eight neighbours). If the amount of neighbors is larger thanthree (a branch), then the skeleton pixel is labeled as background.
3. Detection of the vessels. A vessel is a collection of points, starting at a point withonly one neighbor and ending at a point with only one neighbor. If a beginpointof a vessel is detected within the vessel-image, then the vessel is traced toward itsendpoint. The beginpoint and the endpoint are marked to avoid tracing a vesseltwice.
4. Removal of the small vessels. Vessels with an amount of points less than a certainthreshold S are removed.
The minimal vessel-segment size of S = 10 is selected, in order to remove less importantvessels (and noise), but to retain enough vessel information to extract orientation valuesfrom. From now on vessels are defined as the vessel-segments obtained by thinning thevasculature and removing the branchpoints.
For all points in each remaining vessel, the angle of the vessel at that location is calcu-lated and assigned to the specific point. The angle is calculated using two sample points,one at each side of the current point skipping the first two points if possible (see figure4.12). However, it is not possible to distinguish between two opposite angles (e.g. −1
2π and
12π), because it is unknown which of the vessels endings is the starting point. Therefore the
angle between the two sample points is computed and reassigned an orientation within therange [0, π) radians. The directional vessel map is finished if all vessel pixels are assignedan orientation within the domain [0, π) radians, and all non-vessel pixels are assigned avalue of -1 (undefined).
The eighty directional vessel maps, obtained as described above, are aligned using themanually indicated OD-centers. Then the directional model (DM) is created which shouldbe large enough to contain the pixel data from all of the images making up the DM. In thisDM, the optic nerve has a fixed location (see figure 4.13). Then each pixel in the DM isassigned a value equal to the average of all corresponding defined orientation values in thestack of directional vessel maps, or is labeled ‘undefined’ if there is no defined orientationavailable (the value mean(80)).
45

Figure 4.12: The determination of an orientation value for a vessel pixel.
i = the ith directional vessel map (1,. . . ,80)
count(0) = 0
mean(0) = −1
count(i) =
{count(i− 1) + 1 if α definedcount(i− 1) else
mean(i) =
{mean(i−1)count(i−1)+β
count(i)if α defined
mean(i− 1) else
β =
{α + π if mean(i− 1)− α > 1
2π
α− π if mean(i− 1)− α ≤ −12π
In case of undefined orientation values, the average value assigned to the DM is calculatedwith less orientation information (count ¡80 ). While averaging the vessel orientations oneshould keep in mind that an orientation approaching π radians is almost the same as anorientation of zero radians (see figure 4.14).
The final DM contains a large amount of vessel orientations, but even when usingeighty images gaps between these orientations occur. To create a denser model it is best toincrease the number of vasculatures used in the directional model construction. However,improving binary vasculatures manually is very time-consuming.
Instead a different approach is used, resembling morphological dilations: For each pixelp in the directional model, p is assigned a value equal to the average of all defined eight-connected neighbors. If all neighbors are undefined, then the value of p will remain un-defined. This ‘dilation’ step is performed two times in total to create a dense directionalmodel.
The directional model created so far is only applicable for right eye retinas (left eyeswere turned around the y-axis). Therefore the directional model of right eyes (DMR) isreflected in order to create a directional model of left eyes (DML). However, each definedvalue of the model represents an orientation within the range [0, π) radians. When themodel is reflected all of the orientation values need to be reflected also. So each reflectedpixel (i, j) of the DML is assigned a value equal to:
DML(i, j) = π −DMR(i′, j)
46

Figure 4.13: The stack of directional vessel maps using their OD-locations as reference points.Each DM-pixel is assigned a value equal to mean after averaging the eighty directional vessel mapvalues. Afterwards the DM is ‘dilated’.
with i′ = dimx(DMR) − i, if the reflection is performed using the central y-axis of theDMR. Note that the fixed optic disc should be reflected according the same translation asall other locations.
The created directional models are included in figure 4.15. An indication of the trainedorientations included in the directional model is shown in figure 4.16. The OD-detectionwill be performed on this pair of directional models.
4.7.2 Fitting a segmented vasculature on the model
This paragraph explains how the segmented vasculature in a query image is fitted to thedirectional model and how the location of the OD is found. Fitting an image on thedirectional model requires a binary vasculature. Again the vessel segmentation method ofNiemeijer et al.[16] is being used to create a vessel probability map. This probability mapis thresholded to obtain a binary vasculature (threshold t = 0.5). The same vasculaturepreparation steps (1,. . . ,4) as in the construction of the directional model are performed,followed by the determination of the vessel orientations. At this point three images areretained for further analysis:
1. The binary vasculature, called binary-image
2. The skeleton image without branchpoints, called skeleton-image (obtained duringpreparation)
3. The directional vessels map, called directional-image (the result of vessel orientationdetermination)
The skeleton-image includes all vessels, even the ones smaller than the threshold S. Thedirectional-image includes only vessels which were larger than the threshold S. For all
47

Figure 4.14: The effect to the mean when adding a new angle α. Because we lack the knowledgeabout a vessels starting point, we are not able to distinguish between orientations of α and α−πradians. Therefore, these angles are interpreted the same way and will the mean be adjustedusing the angle that results in the smallest change.
vessels contained in the directional-image a vessel-thickness is determined. The thicknessof a vessel is determined by selecting four points equally divided along the vessel, skippingthe first and the last three points of the vessel. Then for each of these points two lines aredefined, one line between the two neighbors of the point and one perpendicular to the firstline (l⊥). Line l⊥ is bounded by the vasculature pixels of the binary-image. The length ofline l⊥ determines the thickness of the vessel at point p.
For each vessel four thicknesses are defined, one for each of the four points. The averageof these thicknesses is assigned as the vessel’s thickness (see figure 4.17).
Finding the optimal fit for a vasculature on the DMR is performed using potentialoptic nerve locations and a distance measure that determines how well the vasculaturefits. To perform this search, each of the points of the skeleton-image is selected as apotential optic nerve location once. A distance measure based on the vessel orientations(directional-image) and the vessel thicknesses, the smaller the distance the more likely apotential OD-location corresponds with the real OD-center. The optic nerve location inthe DMR is at a known location. The directional-image is placed over the DMR withits potential optic nerve location on the fixed optic nerve location. Then the distancevalue can be determined: Each pixel with a defined orientation in the directional-image iscompared with its corresponding pixel in the DMR. Two pixels correspond if they have thesame location (∆x, ∆y) with respect to the image’s optic nerve. Note that the optic nervesin both images have different absolute coordinates. Then the angle-difference (γ) of thedirectional-image angle and the corresponding DMR-angle is multiplied with the thicknessat (i, j) and summed.
distance(A,DMR) =∑
∀(∆x,∆y)∈A≥0
thickness(i,j)
12π if DMR(∆x, ∆y) undefined
γ if γ ≤ 12π
π − γ if γ > 12π,
(4.1)where γ = |DMR(∆x, ∆y) − directional-image(∆x, ∆y)|, the absolute angular-difference.The potential optic nerve location with the minimal distance (equation 4.1) is selected as
48

Figure 4.15: The trained directional models containing an expected vessel orientation at themajority of the points. Light gray indicates a vertical orientation, white and dark gray indicatehorizontal orientations. Black indicates non-valid values. Left: Left eye directional model. Right:Right eye directional model.
Figure 4.16: Indication of the trained vessel orientations and the trained macula location.
the OD-location for a right eye image odr(x, y). Then the fitting process is repeated tofind the minimal distance for the vasculature fitted on the DML, resulting in odl(x, y). Ifthe minimal distance for the vasculature fitting on DMR is lower than for the vasculaturefitting on DML, then odr(x, y) is selected as the OD-location, otherwise odl(x, y) is selected.
49

Figure 4.17: The skeleton-image (black) is visualized in the binary-image (light-gray). Thethickness of vessels v1 and v2 are defined using the thickness at four sample points in the binary-image.
The trained directional model has a fixed OD-location. Because the macula is devoidfrom bloodvessels, the directional model has a small area for which no vessel orientationsare determined (see figure 4.16). We can select the center of this small area as the maculacenter. The distance between the OD-center and the macula center is approximately 200pixels. However, in a significant number of the images in our datasets the macula is notvisible. This makes evaluation difficult. Therefore we will not do any experiments to findthe macula location but focus instead on left/right eye determination.
A left eye image has the macula located on the right of the optic disc and vice versa inthe right eye. The eye type determination depends on whether the odr(x, y) or the odl(x, y)is selected as the most appropriate model. The input image is classified as a right eye ifodr(x, y) is selected, or as a left eye otherwise.
50

Chapter 5
Experiments and results
5.1 Datasets
The conducted experiments described in this chapter are performed using two differentdatasets. One dataset (STARE-dataset) is obtained from the STARE project website[19],while the other dataset (HOORN-dataset) is composed of randomly selected images froma screening database located at the Image Science Institute in Utrecht. In all images theoptic disc is manually segmented using a circle, as described in section 5.2. The appearanceof the optic disc in an image depends on the type of camera used. A camera using moremagnification will result in images with larger optic discs. The two datasets used in thisthesis are created using cameras with different magnification.
5.1.1 HOORN-dataset
The images within the HOORN-dataset were acquired using a Canon CR5 non-mydriatic3CCD camera with a 45◦ field of view (FOV). Each image is captured using 8 bits percolour plane at 768 × 584 pixels. The FOV of each image is circular with a diameter ofapproximately 540 pixels. This dataset consists of 191 JPEG compressed images with avariety of characteristics.
Due to the random selection process, multiple images of the same patient’s retina canbe included in the HOORN-dataset. The images are of such quality that we should be ableto manually segment the vasculature. The HOORN-dataset contains 97 left eye retinas and94 right eye retinas. In all of these images an optic disc is present. Of the 191 images 51retinas contain pathologies and the other 140 retinas are healthy. In figure 5.1 an exampleof both a normal and a pathological image from the HOORN-dataset are included.
5.1.2 STARE-dataset
The STARE-dataset was composed with the intention to create a difficult dataset. Only31 images of healthy retinas are contained in this dataset. The other fifty retinal imagesexhibit a wide variety of lesions and other symptoms of diseases. This dataset was used byHoover et al. to test their method and to report quantitative results of the method. Allthese images were acquired using a TopCon TRV-50 fundus camera. Each of the images inthe STARE-dataset has three colour planes with 8 bits per plane. The size of the imagesare 700 × 605 with a circular 35◦ FOV chunked at the top and bottom of the field ofview. Also the STARE-dataset contains images in which the magnification of the retina
51

Figure 5.1: Left: A typical image from the HOORN-dataset without pathology. Right: Anexample image from the HOORN-dataset containing pathologies and uneven illumination.
Figure 5.2: Left: A typical image from the STARE-dataset without pathology. Right: Anexample image from the STARE-dataset containing pathology and uneven illumination.
Figure 5.3: Left: An image from the STARE-dataset with less magnification. Right: An imagefrom the STARE-dataset with more magnification.
52

is different. In figure 5.2 an example of both a normal and a pathological image from theSTARE-dataset are included. In figure 5.3 two images with different magnifications areshown.
Note that the camera used to create the STARE-dataset captures images of 35◦, whilethe camera used to create the HOORN-dataset captures images of 45◦. A camera using a35◦ FOV displays a smaller area of the retina than a camera using a 45◦ FOV. In orderto use the same magnification for both datasets, the images in the STARE-database aresubsampled before an automatic OD-detection method is applied. After the OD-locationand the optic disc radius are calculated, these results are scaled back to the original sizein the original image. Assumed that the distance of the two cameras to the retina isapproximately the same, the subsampling factor (scale) is calculated as in equation 5.1.This equation is based on the FOV-geometry (see figure 5.4).
scale =tan(45/2)
tan(35/2)≈ 0.76 (5.1)
Figure 5.4: Left: The area of the retina captured in the photograph with respect to the differentFOV’s. Right: The computation of scale according the FOV-geometry.
5.2 Manual optic disc segmentation
In this work the performance of each of the OD-detection methods is evaluated based onthe determined OD-location with regard to the manually segmented optic disc.
To investigate inter observer differences in optic disc segmentation two observers havesegmented the optic disc in all images. An optic disc is segmented by selecting three pointson the border of the optic disc. Then a circle is drawn through these points (see figure5.5). Both observers found it harder to manually segment the optic discs in images ofthe STARE-dataset, than to manually segment the optic discs in images of the HOORN-dataset. The STARE-dataset contains a few images for which the optic disc boundary ishard to determine. The optic disc radii are collected from the segmentation results. To beable to draw conclusions from these radii the average, the minimum, the maximum, thevariance and the standard deviation are calculated and included in the tables 5.1 and 5.2.Note that the optic disc sizes in pixels of the STARE-dataset are in general larger than the
53

Figure 5.5: Two optic disc segmented by two different observers: 1st observer - green, 2st observer- white. The segmentations were created by selecting three points on the border of the optic discand drawing a circle through these points.
optic disc sizes of the HOORN-dataset, because of the magnification of the STARE-images.
The first observation, while looking at the segmentation results, is that the first ob-server’s segmentations of the optic discs are in general slightly larger than the secondobserver’s segmentation. For both datasets the average and minimal optic disc radii arelarger in case of the first observer in comparison with the second observer. This is probablydue to the fact that the optic disc has a shape that is more similar to an oval than to acircle, which makes the enclosure of the optic disc in a circle dependent on the observer’ssegmentation strategy. Remarkable is that the variance of the optic disc radii is larger incase of the second observer. Apparently the second observer uses a larger variety of opticdisc sizes, which is also confirmed by comparing the minimal and maximal values of thetwo observers. There is no unambiguous explanation for this observation.
HOORN - 1st observeroptic disc radii in pixels
average 40.8minimal 33.3maximal 50.8variance 8.8stdev 2.9
HOORN - 2nd observeroptic disc radii in pixels
average 39.8minimal 28.6maximal 51.0variance 13.9stdev 3.7
Table 5.1: The statistics of 191 manually segmented optic discs from the HOORN-dataset. Left:The first observer statistics. Right: The second observer statistics.
STARE - 1st observeroptic disc radii in pixels
average 60.0minimal 40.6maximal 93.7variance 89.1stdev 9.4
STARE - 2nd observeroptic disc radii in pixels
average 56.8minimal 37.0maximal 87.2variance 95.0stdev 9.7
Table 5.2: The statistics of 191 manually segmented optic discs from the STARE-dataset. Left:The first observer statistics. Right: The second observer statistics.
54

Figure 5.6: Two partially overlapping circles. TP=true positive, FP=false positive, TN=truenegative, FN=false negative
The segmented optic discs consist of a centerpoint (odx, ody) and a radius. For eachimage the centerpoint location and the radius of the segmented optic disc will differ in caseof different observers. Comparing these variables indicates how difficult it is to segmentthe optic disc and whether we can expect a system to automatically segment the opticdisc. The distances between the centerpoint locations of the first and second observer aredetermined, and also the overlap between the segmented circles. The distance measure andthe overlap measure used are defined in equations 5.2 and 5.3. The overlap measure usedis the Jaccard similarity coefficient as described in article [20]. Two overlapping circles (aselected circle and a desired circle) can divide an image into four different areas (see alsofigure 5.6):
• TP: The area contained in the selected circle as well as the desired circle.
• FP: The area contained only in the selected circle.
• TN: The area not contained in the selected circle or the desired circle.
• FN: The area contained only in the desired circle.
distance =√
(od1x − od2x)2 + (od1y − od2y)2 (5.2)
overlap =TP
TP + FP + FN(5.3)
The overlap between two circles is defined as the true positive (TP) area divided by summedarea of the true positives, the false positives (FP) and the false negatives (FN). In otherwords: The overlap is defined as the shared area divided by the shared and non-sharedarea of the two circles.
The average optic disc dislocation and overlap and other statistics are included in thefollowing table (see table 5.3). From this table one can notice that the average dislocationof the OD-centers in the HOORN-dataset are less than in the STARE-dataset, but inboth cases the average dislocation equals approximately ten percent of the average opticdisc radius. So, the dislocation is comparable for both datasets. However, one wouldexpect the overlap to be the same for both datasets. The fact that the average overlapfor the STARE-segmentations is less than the overlap for the HOORN-segmentations is
55

HOORNdistance overlap
average 3.97 0.86minimal 0.22 0.69maximal 13.12 0.99variance 6.33 7.6× 10−3
stdev 2.52 8.7× 10−2
STAREdistance overlap
average 5.71 0.83minimal 0.16 0.60maximal 21.78 0.99variance 17.77 8.1× 10−3
stdev 4.22 9.0× 10−2
Table 5.3: The statistics, of the optic disc dislocation (in pixels) and amount of overlap (inpixels), of both observer segmentation results.
probably caused by the difficulty to determine the boundary of some of the optic discs inthe STARE-images.
The maximal distance between two observed OD-centers does not exceed the minimaloptic disc radius for both datasets, which means that the center of the segmented optic discof the first observer is always included in the optic disc segmentation of the second observerand vice versa. This means that both observers have a 100% successful localization of theoptic disc if the other’s segmentation is used as the golden standard. This is also confirmedby the overlap values which are never below 69% and 60% overlap, for the HOORN-datasetand the STARE-dataset respectively.
5.3 Experiment: Localization of the optic disc
In this experiment all automatic OD-detection methods are applied on both datasets.Almost all methods provide an OD-center. The only exceptions are the methods of Hoover,which can result in an inconclusive result. A detected OD-location can be used as aninitial setting for detecting the optic disc boundary, detecting the macula or to trace thevasculature.
5.3.1 Purpose
The localization process in this experiment is completely automated. The comparison ofthe manual optic disc segmentations established that OD-localization can be performedvery accurate by observers with some knowledge of the anatomy of the human retina. Thepurpose of this experiment is to test which of the described methods performs best inautomated localization of the optic disc in all images of two different datasets and whetheran automatic OD-detection method is able to localize almost all optic discs correctly.
5.3.2 Method
In order to determine which automatic OD-detection method performs best on both datasets,each method’s outcome is classified as being a success or a failure. The classification isperformed as follows:
• An outcome is classified as successful if the resulting OD-center lies within the manuallysegmented optic disc.
• An outcome is classified as failure if the resulting OD-center lies outside the manuallysegmented optic disc or if the outcome is inconclusive.
56

Whether the outcome is classified as successful or as unsuccessful might depend on whichobserver’s segmentation is selected as the golden standard, because of the inter observervariability. Therefore, each outcome is classified according both observer’s segmentationsfor each dataset individually. This results in four performance rates for each method. TheHough transform methods and the method “Pyramidal decomposition and Hausdorff-basedtemplate matching” detect the boundary of the optic disc. This is performed by matchingcircles with different radii on a potential OD-center. In order to give these methods alla fair chance, the same radii are tried in these methods. The radii of 32 pixels up to 48pixels with steps of four pixels (32,36,. . . ,48) are tried. These radii are selected to covermost of the manually segmented optic discs of the HOORN-dataset (see table 5.1):
minbound = mean− 2stdev
maxbound = mean + 2stdev
The center of the circle that fits best on the retinal image is selected as the location of theoptic disc and is used to classify the image.
5.3.3 Literature results
The STARE-dataset was composed by Hoover et al.[5] in order to test their developedmethods. The results they obtained using their methods are included in table 5.4. In thisthesis the results of the reimplemented Hoover methods, as well as all other results, willbe compared with their results.
index method successes success rateH1 Illumination equalization with hypothesis generation 50 61.7%H2 Fuzzy convergence with hypothesis generation 60 74.1%H3 Multiple fuzzy convergences and equalized brightness 72 88.9%
Table 5.4: The reported results of Hoover’s methods [5] tested on the STARE-dataset.
The classification of the results was performed as follows: They manually recorded thecenter point of the optic nerve in each image of the STARE-dataset. An automaticallydetected optic nerve was considered successful if the hypothesis generated was within arange of sixty pixels of the manually segmented optic nerve. On the other hand was thedetected optic nerve considered unsuccessful if the hypothesis generated was outside thisrange or if the hypothesis was inconclusive.
5.3.4 Results
The results are discussed below using the amount of successful OD-localizations for eachdataset using both the observer reference segmentations. The success rates of all methodsare included in table 5.6, each method index refers to a method specified in table 5.5.Typical failures that occur when using the different methods are included in Appendix A.
Mean variance (M1)
This method locates the OD-center within the first-observer’s segmentation in 87 of the191 HOORN-images and 34 of the 81 STARE-images. Using the second-observer’s seg-
57

index methodM1 Mean varianceM2 Template matchingM3 Largest objectM4a Hough transformM4b Hough transform (alternative)M5 Illumination equalization with hypothesis generationM6 Fuzzy convergence with hypothesis generationM7 Multiple fuzzy convergences and equalized brightnessM8 Pyramidal decomposition and Hausdorff-based template matchingM9 Binary vasculature with Hough transformM10 Fuzzy convergence with Hough transformM11 Illumination equalization with pyramidal decompositionM12 Pyramidal decomposition of both vasculature and green planeM13 Branch with most vesselsM14 Path convergence with Hough transformM15 Vasculature fitting on a directional model
Table 5.5: The implemented OD-methods.
1st observer 2nd observerindex HOORN STARE HOORN STARE
M1 87 45.5% 34 42.0% 87 45.5% 33 40.7%M2 119 62.3% 47 58.0% 116 60.7% 45 55.6%M3 120 62.8% 47 58.0% 118 61.8% 47 58.0%
M4a 179 93.7% 48 59.3% 176 92.1% 48 59.3%M4b 177 92.7% 54 66.7% 172 90.1% 55 67.9%M5 109 57.1% 45 55.6% 109 57.1% 45 55.6%M6 149 78.0% 32 39.5% 148 77.5% 32 39.5%M7 167 87.4% 46 56.8% 168 88.0% 45 55.6%M8 172 90.1% 58 71.6% 170 89.0% 57 70.4%M9 184 96.3% 58 71.6% 182 95.3% 58 71.6%
M10 185 96.9% 53 65.4% 186 97.4% 53 65.4%M11 170 89.0% 57 70.4% 167 87.4% 56 69.1%M12 178 93.2% 44 54.3% 177 92.7% 43 53.1%M13 149 78.0% 31 38.3% 149 78.0% 28 34.6%M14 169 88.5% 47 58.0% 165 86.4% 48 59.3%M15 190 99.5% 76 93.8% 189 99.0% 75 92.6%
Table 5.6: The number of successes and the success rates of all OD-detection methods. TheHOORN-dataset contains 191 images and the STARE-dataset contains 81 images.
58

mentation to classify the found OD-location, this method is successful in 87 of the 191HOORN-images and 33 of the 81 STARE-images.
The mean variance method determines the OD-location, based on the property thatdark vessel pixels and bright optic disc pixels vary a lot within the optic disc. Typicalimages in which this method performs well are healthy retinal images with a smoothbackground colour. The method fails when an image contains areas with high variance dueto uneven illumination, exudates, retinas with high transparency, etc.
Template matching (M2)
This method locates the OD-center within the first-observer’s segmentation in 119 of the191 HOORN-images and 47 of the 81 STARE-images. Using the second-observer’s seg-mentation to classify the found OD-location, this method is successful in 116 of the 191HOORN-images and 45 of the 81 STARE-images.
The template matching method uses a template optic disc built using the optic discappearances of twenty-five images. Then this method searches the subimage for whichthe correlation between the appearance of this subimage and the template optic disc ismaximal. The template shows a group of bright pixels surrounded by darker pixels, so thismethod searches for a group of bright pixels that shows high correlation with the template.This method may fail if a retinal image contains an optic disc that does not resemble thetrained appearance. When an image contains areas resembling the optic disc appearancedue to pathologies or uneven illumination, then a successful OD-localization is difficult.
Largest particle (M3)
This method locates the OD-center within the first-observer’s segmentation in 120 of the191 HOORN-images and 47 of the 81 STARE-images. Using the second-observer’s seg-mentation to classify the found OD-location, this method is successful in 118 of the 191HOORN-images and 47 of the 81 STARE-images.
The largest particle method selects the largest connected area with pixel-values abovea certain threshold. In fact this method searches for a large connected group of brightpixels. It will be clear that this method fails when an image contains connected areaslarger and brighter then the optic disc. Effects that cause failures are uneven illumination,large bright pathologies or an optic disc without bright features.
Hough transform (M4)
The conventional Hough transform method (M4a) locates the OD-center within the first-observer’s segmentation in 179 of the 191 HOORN-images and 48 of the 81 STARE-images.Using the second-observer’s segmentation to classify the found OD-location, this methodis successful in 176 of the 191 HOORN-images and 48 of the 81 STARE-images.
The Hough transform expects to find the circular boundary of the optic disc by selectingthe strongest edges of the image. However, the optic disc boundary cannot always bedistinguished from its surroundings and vessels leaving the optic disc will interrupt theoptic disc boundary. These factors decrease the chance of successfully segmenting the(entire) optic disc. Specifically, this method fails when the optic disc has a fuzzy boundaryor when the retina contains an area in which a circle can be fitted on strong vessel-retinaedges.
59

The alternative Hough transform implementation (M4b) locates the OD-center withinthe first-observer’s segmentation in 177 of the 191 HOORN-images and 54 of the 81 STARE-images. Using the second-observer’s segmentation to classify the found OD-location, thismethod is successful in 172 of the 191 HOORN-images and 55 of the 81 STARE-images.
Just like the conventional Hough transform, this method’s weakness is finding the opticdisc when the retina has an optic disc with a fuzzy boundary. Unlike the conventionalHough transform, this method sums the intensity differences at edges instead of using anequal weight for all edges. If the boundary of the optic disc is fuzzy, then the Houghtransform prefers fitting the circle on vessel-retina edges. These edges often have a higherweight within the optic disc than outside of the optic disc, because of the brightness withinthe optic disc. As a result, the alternative Hough transform is less sensitive for (wrong)areas with lots of vessels than the conventional Hough transform. On the other hand, ifan area of the image is extremely illuminated then this area will have an edge with a highweight, which increases the possibility of fitting the optic disc boundary along this area.
Illumination equalization with hypothesis generation (M5)
Using the first-observer’s segmentations and the HOORN-dataset, this method results in109 successes, 29 failures and 53 inconclusive results. The results on the STARE-datasetare: 45 success, 18 failures and 18 inconclusive results. For using the second-observer’ssegmentation to classify the found OD-location, the results are exactly the same.
The main actions taken by this method are an illumination equalization operation and ahypothesis generation which selects groups of bright pixels. Besides equalizing the unevenillumination, the illumination equalization algorithm might also equalize the bright partsof the optic disc. This method returns an inconclusive hypothesis if the two largest groupshave approximately the same size. The OD-localization is successful if the largest group ofbright pixels after illumination equalization belongs to the optic disc. Otherwise the centerof that area is probably located outside the optic disc, and the OD-localization will fail. Afailure may occur if the optic disc has no bright area after illumination equalization, whenparts of the retina stay highly illuminated or due to bright pathologies.
Fuzzy convergence with hypothesis generation (M6)
The fuzzy convergence method followed by hypothesis generation returns a hypothesiswhich is inconclusive in 23 of the HOORN-dataset images and in 17 of the STARE-datasetimages. In case of the first-observer’s reference optic disc the method locates the opticdisc in 149 of the HOORN-images and 32 of the STARE-images and in case of the second-observer’s segmentations, the results are 148 and 32 images respectively.
The fuzzy convergence uses convergence points of the vasculature in order to locatethe optic disc. Its success will depend on the vessel segmentation. Because of unevenillumination, it is often very hard to retrieve a clean segmentation of the vasculature:Some pathologies may be segmented as vessel, while some vessels may be segmented asbackground. This could result in false negative and false positive vessel convergences (lackof segmented vessels and pathologies segmented as vessels) influencing the performance ofthe convergence method. However, a perfect vasculature segmentation does not guaranteea successful OD-localization, because an image contains often more than one convergencepoint. In case of several convergence areas, the largest convergence area is selected, whilethe largest area does not necessarily belong to the optic disc.
60

Multiple fuzzy convergences and equalized brightness (M7)
The final convergence method performs multiple convergence methods using vasculatureswith different vessel-densities. The OD-location hypotheses are combined reducing thenumber of inconclusive results. If the combined hypothesis is still inconclusive, then theequalized brightness method is performed reducing the number of inconclusive results evenmore.
This method locates the OD-center within the first-observer’s segmentation in 167 ofthe 191 HOORN-images and 46 of the 81 STARE-images. Using the second-observer’ssegmentation to classify the found OD-location, this method is successful in 168 of the 191HOORN-images and 45 of the 81 STARE-images.
This method suffers from the same problems as the single fuzzy convergence. However,the effects of vasculature segmentation errors are reduced because vasculatures with differ-ent densities are used. When there is no consensus about the convergence location, thenthe largest brightest part of the retina is selected and the method can fail due to unevenillumination.
Pyramidal decomposition with Hausdorff-based template matching (M8)
The pyramidal decomposition method uses the Hausdorff-based template matching to de-termine the OD-location. This method is successful in 172 images of the HOORN-datasetand 58 images of the STARE-dataset, if the results are compared with the first-observersegmentations. In case of the second-observer segmentations this method is successful for170 image and 57 image for the HOORN-dataset and the STARE-dataset respectively.
The method fails if the OD-region does not pass the preselection performed by thepyramidal decomposition. Optic discs with a dark appearances or optic discs that are asbright as their surroundings, have only a very small chance of surpassing the preselection.OD-regions, that are selected using the pyramidal decomposition, will be searched for circleshaped edges. When an optic disc has a fuzzy boundary, then the method will probablyfail because it will prefer placing the optic disc boundary on vessel-edges. The method isalso sensitive for images with uneven illumination.
Binary vasculature with Hough transform (M9)
The Hough transform (alternative) pruned with the binary vasculature results in 184 and58 successful OD-localizations in case of the first observers segmentations for the HOORN-dataset and the STARE-dataset, respectively. In case of the second-observer segmentationsthe method is successful for 182 image and 58 images for the HOORN-dataset and theSTARE-dataset.
The same failures may occur as when using the Hough transform (alternative), but nowonly locations on the binary vasculature are used. Failures only occur in images containinga highly illuminated area or when the optic disc has a fuzzy boundary and the Houghtransform is able to place the circle’s boundary along another strong edge.
Fuzzy convergence with Hough transform (M10)
The comparison using the first observer segmentations, results in 185 and 53 successes forthe two datasets. Comparing the results with the second observer segmentations gives us186 and 53 successes.
61

This method has approximately the same drawbacks as the fuzzy convergence, exceptthat the optic disc can be properly localized if one of the convergence regions contains theOD-center and the optic disc is not too fuzzy.
Illumination equalization with pyramidal decomposition (M11)
The comparison using the first observer segmentations, results in 170 and 57 successes forthe two datasets. Comparing the results with the second observer segmentations gives us167 and 56 successes.
The pyramidal decomposition applied on an illumination equalized image needs theoptic disc to be a bright area. If the optic disc is not a large bright area, or if the highlyilluminated areas are not completely removed by the illumination equalization process orperhaps a combination of the two, then this method may fail in localizing the optic disc.Also a group of bright symptoms may cause failures, because they may not be filteredduring the illumination equalization process. These symptoms altogether may contributeto a bright pixel in a low resolution image.
Pyramidal decomposition of both vasculature and green plane (M12)
The comparison using the first observer segmentations, results in 178 and 44 successes forthe two datasets. Comparing the results with the second observer segmentations gives us177 and 43 successes.
This method searches a location between an area covered with vessels and an areacovered with bright pixels. Note that these search properties correspond to the appearanceof (healthy) optic discs. This method is sensitive for groups of vessels which cover a largerarea than the vessels located in the optic disc. Another characteristic failure occurs inretinas containing an optic disc which is hardly brighter than its surrounding.
Branch with most vessels (M13)
The method that selects the branch-segment with most vessels connected to it results in149 and 31 successes (1st observer) and 149 and 31 successes (2nd observer).
This method will select a location where artery-branches and vein-branches cross eachother, however in many images such a cross point is located outside of the OD-region.
Path convergence with Hough transform (M14)
The comparison with the first observer segmentations, results in 168 and 47 successes forthe two datasets. Comparing the results with the second observer segmentations gives us165 and 48 successes.
The method fails when most paths end before the optic disc is reached, this will happenif a retina contains many cross points of artery-branches and vein-branches outside the OD-region or if main vessels are not connected. Even when a convergence point is located insidethe OD-region, then the method is not guaranteed to be successful. In this case the Houghtransform can still select a different convergence point, because a circle can be fitted alongvessels or because of a fuzzy OD-boundary.
62

Vasculature fitting on a directional model (M15)
Fitting the vessel orientations on a directional model to determine the OD-locationis successful in 190 images of the HOORN-dataset and 76 images of the STARE-dataset
in case of the first-observer segmentations. In case of the second-observer segmentationsthis method is successful for 189 image and 75 image for the HOORN-dataset and theSTARE-dataset respectively. Failures occur when using this method on images in whichthe optic disc is located in the most upper or lower part of the retina. All failures thatoccur using this method are included in Appendix B.
5.3.5 Observations
If we look at the results from the experiment and the results from literature, we observeseveral differences concerning the performance of the methods. These differences are de-scribed below and possible explanations for these differences are given.
Differences between observers
The first thing we notice when looking at the result table 5.6 is that the amount of successesis equal or higher in case of the first observer in comparison with the second observer,except for a few values. Differences in the amount of successes is due to the variations inthe manual segmentations and the method not being able to exactly locate the OD-center.
We learned, from comparing the segmentations of the two observers, that the selectedOD-centers may be located differently. When two segmented circles do not share theircenterpoints, we may have an area in which a location is classified successful using the firstcircle but classified unsuccessful using the second circle and vice versa. This explains whythe number of successes are sometimes higher in case of another observer.
We also learned that the average size of the optic discs segmented by the first observerare a bit larger than the optic discs segmented by the second observer. Thus, the area inwhich a location is classified as successful is on average larger in case of the first observer. Ifwe look at figure 5.6 and select the first observer’s segmentation as the ‘desired circle’ andthe second observer’s segmentation as the ‘selected circle’, then we see that the non-sharedarea are equally sized. If the desired circle is larger, then the FN will become larger thanthe FP. On average is the desired circle larger, increasing the odds that a detected locationis situated in FN instead of FP. This means it is more likely that the number of successesis higher in case of the first observer, than in case of the second observer.
Differences between results and literature results
If we compare the results of the reimplemented Hoover-methods (methods M5, M6 andM7), using the first observer results, with Hoover’s original results (methods H1, H2 andH3), then we notice significant differences. The illumination equalization method withhypothesis generation results in 45 successes (M5) instead of 50 successes (H1). The fuzzyconvergence method with hypothesis generation results in 32 successes (M6) instead of 60successes (H2). Applying multiple fuzzy convergences and equalized brightness results in46 successes (M7) instead of 72 successes (H3). Besides the fact that a reimplementedmethod is often only an approximation of the original method, there are several possibleexplanations for this difference.
63

Hoover uses the optic nerve as OD-center and a radius of sixty pixels in which thedetected location was classified successful, however the STARE-images contain optic discswith radii of approximately 40 pixels up to 90 pixels. Magnified images might contain lessvessel convergence points which makes it easier to correctly locate the optic nerve. Forimages without magnification the reverse holds. The different classification used in thisthesis will probably result in a lower success rate. An example of a failure which would beclassified ‘successful’ using Hoover’s evaluation approach is included in figure 5.7.
The differences in success rates in case of the fuzzy convergence methods is probablydue to the use of a different vessel segmentation technique. Hoover uses a vessel probingtechnique that generally obtains long vessel segments. In this thesis, a vessel segmentationtechnique based on pixel classification is applied on the image to obtain the vessels. Thistechnique results in a vessel probability map, on which a threshold can be applied to obtaina binary vasculature. Because each pixel is classified individually, vessel segments may beinterrupted at several locations and small vessel segments may occur. Then, the fuzzyconvergence method fits a fuzzy segment on all thinned vessels. These fuzzy segmentsare equally weighted, resulting in strong convergence locations at groups of small vesselsegments. The vessel segmentation based on pixel classification results in more little vesselsegments than the vessel segmentation based on vessel probing. Therefore it is morelikely that the fuzzy convergence fails if the vessel segmentation technique based on pixelclassification is used (see figure 5.8). Using multiple convergences increases the number ofsuccesses, but copes with the same problems as using a single convergence.
Figure 5.7: A failure after applying multiple fuzzy convergences and equalized brightness, whichwould be classified as successful using the evaluation approach of Hoover et al.
Differences in search for OD-properties
In general the optic disc has a circular shape, brighter pixels within its boundaries thanin its surroundings and is partly covered with vessels. From the results described foreach method in paragraph 5.3.4, we have categorized the optic disc properties a methodmay search for (listed in table 5.7). One method (M1) searches for an area with a highintensity variation, two methods (M2 and M3) search for a group of pixels with a highintensity and two methods (M5 and M11) search also for a group of high intensity pixelsafter an additional illumination equalization process. One method, using two differentimplementation approaches (M4a and M4b), tries to fit a circle on high intensity edges inorder to locate the optic disc. Looking at the results, there are four methods (M6, M7, M13
64

Figure 5.8: A failure due to strong convergence locations at groups of small vessel segments.Left: The vessel probability map. Middle: The vessel segmentation after applying a threshold onthe vessel probability map (t=0.5). Right: The fuzzy segments indicating the convergence.
and M14) trying to locate the optic disc by means of the selection of a location to whichmany vessels can be traced or converge. Other implemented methods use combinationsof these search properties. Method M15 uses besides the locations of vessels also theorientations of vessels. This extra vessel-feature is added as a single property class. Notethat this feature cannot be used without having the ‘basic’ vessel information.
All of the OD-detection methods can be assigned to at least one of the defined propertyclasses. Table 5.8 shows the combination of optic disc properties of all methods. Thereare five methods that use multiple optic disc properties to localize the optic disc. Onemethod (M15) was mentioned already, this method uses vessel information as well as theorientation of vessels. Another method (M8) uses the properties that the optic disc shouldconsist of bright intensity pixels and that a circular shape can be fitted on strong intensityedges. There are two methods (M9 and M10) using the properties that the optic disccontains vessels and that a circular shape can be fitted on strong intensity edges. Finallythere is one method (M12) that searches a location between an area covered with vesselsand an area covered with bright pixels.
property class property to search forIntVar An area with high intensity variationInt A group of high intensity pixelsInt+ A group of high intensity pixels after illumination equalizationShape A circular shaped object on intensity edgesVessels Vessel properties; location, density or convergence informationVesOrient Vessel orientations; use defined vessel orientations
at fixed locations with respect to the optic disc
Table 5.7: The properties a method can search for, in order to locate the optic disc.
Now that the method are assigned to property classes, the methods can be compared us-ing this classification instead of comparing all methods individually. The next comparisonsare performed using the success rates obtained by using the first observer segmentations.The method in class IntVar exhibit the lowest performance of all different classes on thedatasets, in more than the half of the images the maximal intensity variation is locatedoutside of the optic disc. A method based on intensity variation will not be very successfulon the two datasets.
The methods in class Int perform a bit better on both datasets. For the HOORN-
65

classes methods rates (HOORN) rates (STARE)IntVar M1 45.5% 42.0%Int M2, M3 62.3%, 62.8% 58.0%, 58.0%Int+ M5, M11 *57.1%, 89.0% *55.6%, 70.4%Shape M4a, M4b 93.7%, 92.7% 59.3%, 66.7%Vessels M6, M7 *78.0%, *87.4% *39.5%, *56.8%
M13, M14 78.0%, 88.5% 38.3%, 58.0%Shape and Int M8 90.1% 71.6%Vessels and Shape M9, M10 96.3%, 96.9% 71.6%, 65.4%Vessels and Int+ M12 93.2% 54.3%Vessels and VesOrient M15 99.5% 93.8%
Table 5.8: The methods are classified according the different properties they use to detect theoptic disc. The included success rates (of the first observer) may be used to compare the differentproperty classes. (*these rates will show a higher performance if an inconclusive result is notpossible)
dataset these methods are successful in approximately 62.5% of the images and for theSTARE-dataset in 58% of the images. Still there are a lot of images in which the largestgroup of intensity pixels is not located within the optic disc. Using merely the intensityproperty is not good enough.
Class Int+ contains several methods whose results have been marked with an aster-isk(*). This means that these results could be improved if an inconclusive result is notpossible. The class Int+ performs better than the previous classes (89.0% and 70.4%) ifthe marked results are not taken into account.
Searching for a circular shaped object in intensity edges (Shape-class) is a techniquethat performs very well on images from the HOORN-dataset. For the STARE-dataset thistechnique is successful for 59% up to 67% of the images, which is better than class Intand IntVar but worse than class Int+. The problem with searching for a circular shapedobject, is that a number of circles with various sizes must be used. During the experimentscircles with radii 32,36,. . . ,48 are used. However, the optic discs in the STARE-imageshave an average radius of 60.0 pixels and the standard deviation of these radii is 9.4 (using1st observer data). After each STARE-image is scaled using the scale-factor 0.76, theaverage optic disc radius is 45.6 pixels and the standard deviation is 7.1. The circles usedduring the experiments do not cover most of the optic discs contained in STARE-images.It would be better to try circles with radii of 32 pixels up to 60 pixels with steps of fourpixels (32,36,. . . ,60), because then we cover approximately 95% of the radii (mean± 2sd)in the STARE-dataset. All methods searching for a circular shaped object in STARE-images should use the larger range of circle-radii. We expect that the success rates ofthese methods will become higher when the above is taken into account. We also expectthe number of successes within class Shape to exceed the number of successes achievedby methods within class Int+. However, these experiments were not performed and theseresults are therefore not included in this thesis.
The methods contained in class Vessels have success rates varying from 78% up to 89%for the HOORN-dataset and success rates varying from 38% up to 58% for the STARE-dataset. Thus, methods based just on vessels of the vasculature perform in case of theHOORN-images and STARE-images less good than searching for shape properties.
The method that takes the shape and the intensity properties of the optic disc into
66

account (class Shape and Int) performs less good on the HOORN-dataset (90.1%) thanjust searching for shape properties, but performs better on the STARE-dataset than allprevious classes (71.6%). Note that these rates are higher in comparison with the classesInt and Shape individually, except for the HOORN-rates of class Shape.
Methods from the class Vessels and Shape perform best on the HOORN-images so far(success rates around 96%) and may achieve a success rate that equals the results of classShape and Int for the STARE-images (approximately 70%). Note that these rates are allhigher in comparison with the classes Vessel and Shape individually.
Using vessel information in combination with a group of high intensity pixels afterillumination equalization (class Vessels and Int+) improves the success rates for theseclasses individually in case of the HOORN-dataset. However, the success rate for theSTARE-dataset decreases if we compare the rates with class Vessels and Int+. Results ofthis class are less good than the results of the class Vessels and Shape.
The last developed method uses vessel information and vessel orientations to locate theoptic disc (class Vessels and VesOrient). This method achieves the highest performance onthe HOORN-dataset and the STARE-dataset of all other classes. This method performsalso better (93.8%) on the STARE-dataset than the results described in the literature byHoover (88.9%).
Results of the best performing method
The method that performs best on both datasets is: “Vasculature fitting on a directionalmodel”. This method is by far better than all other evaluated methods. If the results of thismethod are compared to the first observer’s segmentations, only one failure occurs in caseof the HOORN-dataset and only five failures occur in case of the STARE-dataset. If theresults of this method are compared to the second observer’s segmentations, two failuresoccur in case of the HOORN-dataset and six failures occur in case of the STARE-dataset.These images are included in Appendix B.
For the two failed HOORN-images (figure B.1:(a) and (b)), this method selects a loca-tion only a few pixels away from the optic disc. This is also the case in two images of theSTARE-dataset (figure B.2:(a) and (c)).
Two STARE-images (figure B.2:(d) and (e)) fail because the directional model is trainedon OD-centered images and macula centered images, while these images are not optic discor macula centered. The reason of the failures is that a large amount of vessels will notoverlap the directional model and these vessels will be assigned the maximal angle distanceof 1
2π. Instead of the true OD-location a location is selected as optic disc for which almost
all vessels will overlap the model.One STARE-image (figure B.2:(b)) fails because the vessel segmentation method was
not able to segment enough vessel information and the last STARE-image (figure B.2:(c))probably fails because the two main vessels are not correctly segmented.
5.3.6 Conclusion
From the classification of the methods according their different search-properties, we canconclude that a method based on the intensity variation or just on the intensity values(without illumination equalization) is not sophisticated enough to achieve good results inour datasets. Methods searching for a group of high intensity pixels after illuminationequalization or searching for a circular shape on intensity edges perform better, but still
67

miss a significant number of optic discs. If the vessels are segmented from the retinalimage first, we can use this additional information to localize the optic disc. For instance,a method may use the convergence of the vessels, but its performance depends on thevessel segmentation technique. For a convergence method the connectivity of vessels ismore important than the completeness of the vasculature.
In general, using a combination of classes performs better than each class individually.Especially using vessel information to prune a method that fits a circular shape on intensityedges is a technique that performs very well on the HOORN-dataset. But, in case of theSTARE-images with many different pathologies, magnifications and uneven illumination,results are not very good.
From the results of the conducted experiments it can be concluded that the methodthat fits a vasculature on a directional model is able to find significantly more optic discsthan all other evaluated methods.
It appeared to be very difficult to create a robust OD-detection method based onthe OD-appearance, because the OD-appearance varies too much. The optic disc may,for instance, appear abnormal due to uneven illumination and symptoms. Which make ithard for an OD-detection method to localize the optic disc using local optic disc properties.Using more global OD-features, like the orientation of vessels in the retinal image, resultsin a more robust OD-detection method. The method that fits a vasculature on a directionalmodel uses this characteristic features: At each location, with respect to the optic disc,the orientation of a vessel is approximately the same, especially the orientations of vesselsnear the optic disc. The directional model benefits from the fact that it is created usingvessel angles from retinal images, thus vessel angles from a query image are expected tocorrespond with the data in the directional model.
5.4 Experiment: Determination of the eye-type
There are two methods that try to determine whether an input image contains a retinaof a left eye or a right eye. These two methods are “Pyramidal decomposition of bothvasculature and green plane” and “Vasculature fitting on a directional model”. In thisexperiment both methods are applied on the images in both the HOORN- and STARE-datasets. If the type of eye is determined and the optic disc is localized, then the locationof the macula in the image is approximately known, however the precise location dependson the image’s magnification and rotation.
5.4.1 Purpose
In this experiment the type-of-eye (TOE) determination is also completely automated. Thepurpose of this experiment is to test which of the TOE-determination methods performsbest on the different dataset-images.
5.4.2 Method
To determine which automatic TOE-determination methods performs best on the datasets,each method’s outcome is compared with the manual TOE-determination. If these resultsare the same, then the automatic determination is considered successful, otherwise theautomatic determination is considered unsuccessful.
68

5.4.3 Results
The results are discussed below using the amount of successful TOE-determinations foreach dataset. The success rates of all methods are included in table 5.9. The method’sindex refer to the methods specified in table 5.5.
method index HOORN STAREM12 165 86.4% 49 60.5%M15 191 100% 77 95.1%
Table 5.9: The number of successes and the success rates of both type-of-eye detection methods.The HOORN-dataset contains 191 images and the STARE-dataset contains 81 images.
• Pyramidal decomposition of both vasculature and green plane (M12)This method successfully determines whether the image is a left eye or a right eye in 165of the 191 HOORN-images and in 49 of the 81 STARE-images.
• Vasculature fitting on a directional model (M15)This method successfully determines whether the image is a left eye or a right eye in all ofthe 191 HOORN-images and in 77 of the 81 STARE-images. All failures that occur usingthis method are included in Appendix C.
The HOORN-dataset contains 97 left eye images and 94 right eye images and in theSTARE-dataset 33 right eye images and 48 right eye images are contained. A simplemethod that would determine that all HOORN-images are left eye images would achieve asuccess rate of 51% and a method that would determine that all STARE-images are righteye images would achieve a success rate of 59%. On the HOORN-dataset both methodsperform significantly better (86% and 100%) than this simple method. but on the STARE-dataset method M12 performs only slightly better than this method.
The failed images of the best performing method (M15) share the same properties;these images are all OD-centered and are highly magnified. Because of these propertiesthe macula is barely included in the image and the specific vessel orientations around themacula are not taken into account. This makes it very hard to distinguish between a lefteye retina and a right eye retina. In these images the minimal distance for fitting thesegmented vasculature on the DMR and on the DML is approximately the same.
5.4.4 Conclusion
Fitting the vasculature on a directional model performs best. A success rate of 100% isachieved on the HOORN-dataset and a success rate of 95.1% is achieved on the STARE-dataset. This method outperforms the other method that determines the type of eye usingvessel and intensity information. These observations indicate that the determination ofthe type of eye can be performed accurately, without human interference.
69

Chapter 6
Discussion and future research
In this thesis several automatic OD-detection methods are evaluated. Each of these methodtakes one or more optic disc properties into account, to localize the optic disc. The per-formance of a method increases if more optic disc properties are taken into account. Forinstance, using shape and vessel properties to localize the optic disc results in a highersuccess rates than using these properties individually. During the evaluation of the meth-ods using Shape-properties, we noticed that the amount of different radii used for theHOORN-images was not representative for the STARE-images. Using a larger variety ofradii might increase the success rates for methods using shape properties. Due to the timeconstraint no additional research is conducted about the optimal variety of radii. However,in order to complete the comparison of property classes it is recommended to conduct theOD-localization experiments again for these methods. Note that the radius settings usedduring the conducted experiments perform well on the HOORN-images. We expect thatthese settings will perform also well for larger screening sets with similar images.
The reimplemented methods of Hoover may return an inconclusive result. If the con-vergence method finds two possible OD-regions with approximately the same size, thenthe method does not choose between them. This way a wrong choice is prevented and anadditional method might complete the OD-localization in this case. Because the reimple-mented methods of Hoover may return an inconclusive result instead of an OD-location,they appear to be difficult to compare with other methods. It may be useful to adjustthe reimplemented Hoover methods in a way that they always return a location, for in-stance by skipping the analysis using the Fisher’s linear discriminant. Performing theOD-localization experiments again for these methods might affect the conclusions aboutthe property classes.
The method that fits a segmented vasculature on the image performs very well indetermining the type of eye and in localizing the optic disc. There are a number of aspectsof this method which could be improved in the future.
The directional model is created using vessel orientations from forty OD-centered im-ages and forty macula centered images. During the experiments, this method failed on twoimages which were neither OD-centered nor macula centered. Future work could also at-tempt to correctly localize the optic disc in these images by adding orientation informationfrom images with the optic disc located in the upper or lower part of the image.
Before the directional model was ‘dilated’ to increase its density, the directional modelwas well defined for location near the optic disc, but other locations were defined usingless orientation information. Orientations from the directional model that were averagedusing only a few vessel orientations are less reliable. Besides keeping track of the average
70

orientation values an option might be to keep track of the standard deviations as well. Ifa value from the directional model has a high standard deviation, then the average wascalculated using orientations with many different orientations. In this case the standarddeviation of an averaged orientation value is higher, then the orientation value is lessreliable than an orientation value with a low standard deviation. The standard deviationscould be used as weights during the fitting of a segmented vasculature on the directionalmodel, increasing the reliability of the fitting process.
The next steps in developing an automated DR-screening system is to automaticallydetect the optic disc boundary, the macula location and the macula boundary. The opticdisc and the type-of-eye indicate the macula location. However, in case the minimal dis-tance for fitting a segmented vasculature on the DMR and on the DML are approximatelythe same, then the determination of the type-of-eye become less reliable and might fail.Future work could also attempt to find an extra method to determine the type-of-eye inthis case. Otherwise localization of the macula should be performed on both sides of theoptic disc.
From the construction of the directional model we have learned that the distance be-tween the OD-center and macula center is approximately 200 pixels. The images usedto construct the directional model were selected from the same database as the HOORN-images. We have also learned that the optic disc radius for these images is approximatelyforty pixels (using the first observer segmentation). Combining this information we knowthat the distance between the OD-center and the macula is approximately five times theoptic disc radius.
This information can be used in two ways; if we know the location of the optic disc andthe macula, then we know the approximate optic disc size (and macula size), contrarily ifwe know the optic disc size, then we know at what distance the macula should be located.Using this information the DR-screening system becomes robust for magnified images.Another possibility is to determine the magnification of the query image with respect tothe HOORN-images first. For instance, if the average vessel thickness is trained using theHOORN-data, then the magnification can be computed by comparing the average vesselthickness of the query image with the trained thickness. The determined magnificationindicates the optic disc and macula size and the distance between their centers.
71

Appendix A
Typical OD-localization failures
Here we provide a number of failed OD-localizations. For each failed case two images areprovided, one of the detected location and one of the actual OD location.
(a) (b)
Figure A.1: Failures of the mean variance method (M1). (a) failure due to a transparentretina resulting in a high variance area after contrast enhancement. (b) failure due to symptoms.
(a) (b)
Figure A.2: Failures of the template matching method (M2). (a) failure due to a optic disclook-a-like symptom. (b) failure due to a faint optic disc.
(a) (b)
Figure A.3: Failures of the largest particle method (M3). (a) failure due to a unevenillumination. (b) failure due to a dark optic disc.
72

(a) (b) (c)
(d) (e) (f)
Figure A.4: Failures and successes using the Hough transform methods (M4). Upper row:Results of the conventional Hough transform method (M4a). Lower row: Results of the alternativeHough transform method (M4b). (a) failure due to fitting the circle on vessels. (b) failure dueto a faint optic disc. (c) success due to fitting the circle on vessels. (d) success due to fitting thecircle on vessels and optic disc boundary. (e) failure due to a faint optic disc. (f) failure due tovery uneven illumination.
(a) (b)
Figure A.5: Failures using the illumination equalization method followed by hypoth-esis generation (M5). (a) failure due to a bright symptom. (b) failure due to very unevenillumination.
(a) (b)
Figure A.6: Failures using the fuzzy convergence method followed by hypothesis gener-ation (M6). (a) failure due to a transparent retina resulting in too many vessels and a strongconvergence. (b) failure due to a convergence point outside the optic disc.
73

(a) (b)
Figure A.7: Failures using the multiply fuzzy convergence and equalized brightnessmethod (M7). (a) failure due a wrong convergence point. (b) failure, because of unevenillumination (after not reaching consensus about the vessel convergence).
(a) (b)
Figure A.8: Failures using the pyramidal decomposition method followed by Hausdorff-based template matching (M8). (a) failure, because the optic disc area was not bright enoughto be selected while performing pyramidal decomposition. (b) failure, because the CV r dominatesthe CV g due to uneven illumination.
(a) (b)
Figure A.9: Failures using the Hough transform (alternative) guided by the vasculature(M9). (a) failure due to a strong edge and a fuzzy (true) OD-boundary. (b) failure due to veryuneven illumination.
Figure A.10: A failure using the Hough transform (alternative) guided by the fuzzyconvergence (M10), because the transparent retina results in a vessel segmentation with a lotof convergence points outside the optic disc area.
74

(a) (b)
Figure A.11: Failures using pyramidal decomposition after illumination equalization(M11). (a) failure, because of a group of bright symptoms. (b) failure due to a unsuccessfullyequalizing the illumination.
(a) (b)
Figure A.12: Failures using pyramidal decomposition of both the vasculature and theequalized green plane image (M12). (a) failure due to a large area covered with vessels. (b)failure due to a faint optic disc.
Figure A.13: Failures when selecting the branch with most vessels (M13), because crosspoints with a lot of overlapping artery-branches and vein-branches are located outside the opticdisc boundary.
Figure A.14: Failure when using the Hough transform pruned with the path convergence(M14). The optic disc has no distinct boundary at its convergence point.
75

Appendix B
Failed OD-localizations using methodM15 - vasculature fitting on adirectional model
The method that performs best on both datasets is the method M15 - “Vasculature fittingon a directional model”. Using this method on the HOORN-dataset results in at most twofailures if the outcomes are compared with
the manual segmentations of the second observer. Using this method on the STARE-dataset results in at most six failures if the outcomes are compared with the manualsegmentations of the first observer. The images in which the OD-localization failed areincluded below.
(a) (b)
Figure B.1: Failures on HOORN-images.
76

(a) (b)
(c) (d)
(e) (f)
Figure B.2: Failures on STARE-images.
77

Appendix C
Failed TOE-determinations usingmethod M15 - vasculature fitting ona directional model
The method M15 - “Vasculature fitting on a directional model” performs best on bothdatasets. The images in which the TOE-determination failed are included below. A failureoccurs if the ‘detected macula’ is not located on the same side of the localized optic discas the manually selected macula. The located optic disc using method M15 is indicatedwith a white cross. The rhombus indicates the location of the manually selected macula.The circle represents the ‘detected macula’. If the circle is not visible, it is located outsidethe image.
78

79

Bibliography
[1] C. Sinthanayothin, J.F. Boyce, H.L. Cook, and T.H. Williamson. Automated local-isation of the optic disc, fovea, and retinal blood vessels from digital colour fundusimages. British Journal of Ophthalmology, 83:902–910, 1999.
[2] A. Osareh, M. Mirmehdi, B. Thomas, and R. Markham. Comparison of colour spacesfor optic disc localisation in retinal images. Proceedings of the 16th InternationalConference on Pattern Recognition, pages 743–746, 2002.
[3] T. Walter and J.C. Klein. Segmentation of color fundus images of the human retina:Detection of the optic disc and the vascular tree using morphological techniques.Proceedings of the 2nd International Symposium on Medical Data Analysis, pages282–287, 2001.
[4] S.F. Barrett, E. Naess, and T. Molvik. Employing the Hough transform to locate theoptic disk. Biomedical Sciences Instrumentation, 37:81–86, 2001.
[5] A. Hoover and M. Goldbaum. Locating the optic nerve in a retinal image usingthe fuzzy convergence of the blood vessels. IEEE Transactions on Medical Imaging,22(8):951–958, 2003.
[6] M. Lalonde, M. Beaulieu, and L. Gagnon. Fast and robust optic disc detection usingpyramidal decomposition and Hausdorff-based template matching. IEEE Transactionson Medical Imaging, 20(11):1193–2001, 2001.
[7] D.A. Quillen and B.A. Blodi. Clinical Retina, pages 1–13. AMA Press, 2002.
[8] J. Siegelman. Retinal Diseases: Pathogenesis, Laser Therapy, and Surgery, pages4–10. Little, Brown and Company, 1984.
[9] K.M. Zinn. Clinical Atlas of Peripheral Retinal Disorders, pages 2–11. Springer-Verlag, 1988.
[10] Stlukeseye.com [online] 2004. available: http://www.stlukeseye.com.
[11] Eyemdlink.com [online] 2004. available: http://www.eyemdlink.com.
[12] A. Osareh, M. Mirmehdi, B. Thomas, and R. Markham. Automatic recognition ofexudative maculopathy using fuzzy C-means clustering and neural networks. MedicalImage Understanding and Analysis, pages 49–52, 2001.
[13] H.R. Myler and A.R. Weeks. The Pocket Handbook of Image Processing AlgorithmsIn C, pages 112–115. Prentice Hall PTR, 1993.
80

[14] H. Li and O. Chutatape. Fundus image features extraction. Proceedings of the 22ndAnnual EMBS International Conference, 4:3071–3073, 2000.
[15] A. Hoover, V. Kouznetsova, and M. Goldbaum. Locating blood vessels in retinalimages by piecewise threshold probing of a matched filter response. IEEE Transactionson Medical Imaging, 19(3):203–210, 2000.
[16] M. Niemeijer, J.J. Staal, B. van Ginneken, M. Loog, and M.D. Abramoff. Comparativestudy of retinal vessel segmentation methods on a new publicly available database.SPIE Medical Imaging, 5370:648–656, 2004.
[17] D. Eberly. Skelonization of 2D binary images [online] 2004. available: http:-//www.magic-software.com/documentation/skeletons.pdf.
[18] A. Ruggeri, M. Foracchia, and E. Grisan. Detection of optic discbased on a directional model of vascular network. [online] 2004. available:http://www.cafia.org/cafia2003/cafia-3 abstracts.pdf.
[19] Stare project website [online] 2004. available: http://www.ces.clemson.edu/-ahoover/stare.
[20] Z.Y. Shan, J.Z. Liu, and G.H. Yue. Automated human frontal lobe identification in mrimages based on fuzzy-logic encoded expert anatomic knowledge. Magnetic ResonanceImaging, 22(5):607–617, 2004.
81