Embed Size (px)
Citation preview

Automatic profilometry of 3-D diffuse objects by spatialphase detection
Satoru Toyooka and Yuuji waasa
A method automatically processing a projected grating to profile a 3-D diffuse object is proposed. Adeformed grating pattern projected on the object is regarded as a phase modulated pattern with a constantspatial carrier frequency. To retrieve phase modulation, acquired data in a microcomputer are sinusoidallyfitted using a phase detection algorithm similar to that used in communication techniques. High sensitivitymeasurements of height distribution can be done using simple optical geometry. Random and systematicerrors inherent in the method are discussed in detail.
1. Introduction
Noncontact profilometry of 3-D diffuse objects isimportant in mechanical engineering, medicine, dress-making, etc. Projection moire topography is a well-known technique for measuring surface profiles.1Problems in moire topography are that the fringe ordernumber is not linear in object height and that an equi-phase plane of moire fringes is curved except whenspecial optical geometry is used in which the opticalaxes of the projector and the imaging lenses are paral-lel.2 Several methods of computer-aided profilometryto determine surface profile have been devised. Phasemeasuring techniques developed to analyze interfer-ence fringes3-6 can be applied to profilometry. Thephase of a deformed grating image projected on anobject is directly analyzed without the use of a refer-ence grating. By these methods, the problems en-countered in moire topography are almost solved.The nonlinear relationships mentioned above are easi-ly compensated by software, if the relationship be-tween phase and height is known. Among them, Fou-rier transform profilometry (FTP) by Takeda et al. 4 5
is an excellent method. Interference fringes with atilted reference wave or an image of a grating projectedon the object are scanned by an electrooptical imagingdevice perpendicular to the fringes. Phase values aredetermined by calculating Fourier transformation of
The authors are with Saitama University, Faculty of Engineering,Urawa, Saitama 338, Japan.
Received 16 September 1985.0003-6935/86/101630-04$02.00/0.©) 1986 Optical Society of America.
acquired irradiance data, filtering in the spatial fre-quency domain, and calculating inverse Fourier trans-formation.
We also proposed an alternative method of analyz-ing interference fringes 7 that is, spatial phase detec-tion (SPD). SPD is similar to FTP in the form of thepattern to be analyzed and the method of data acquisi-tion, but the calculations for deriving the phase distri-bution is greatly simplified in the SPD. A deformedgrating pattern is regarded as the phase modulatedpattern with a constant spatial carrier. To retrievephase modulation, the acquired data are sinusoidallyfitted using a phase detection algorithm similar to thatused in communication techniques.
In this paper we propose formulas for the SPD ap-plied to profilometry and show experimental resultstogether with an error analysis.
II. Principle of Spatial Phase Detection
The optical geometry is shown in Fig. 1. P is thecenter of the exit pupil of the projection lens and I isthe center of the entrance pupil of the imaging lens.The optical axes of the projection and imaging lenseslie in the same plane and intersect at point 0 makingan angle . We assume a fictitious plane R near thesurface of the object which serves as the referenceplane. Points P and I are located at the same distancelo from plane R and IP = do. The optical axis of theimaging lens is normal to plane R, and the coordinatesystem (xy) is attached to plane R with the origin 0.The image of the grating is projected on the object to bemeasured and the direction of the grating lines is nor-mal to the plane of the figure. We used a TV camera(Hamamatsu C-1000) as the imaging device. The scandirection of the TV camera is in the x direction.
The image of the deformed grating is given by
1630 APPLIED OPTICS / Vol. 25, No. 10 / 15 May 1986

lo
Fig. 1. Geometry of projecting and imaging a grating pattern on theobject: P, exit pupil of the projection optics; I, entrance pupil of theimaging optics; R, plane perpendicular to the optical axis of theimaging optics; Q, plane perpendicular to the projection optics; 0,
intersecting point of the two optical axes.
g(x,y) = a(x,y) + b(x,y) cos [27rfox + sc(xy)], (1)
where s(xy) is the phase distribution which is thefunction of the height of the surface to be measured.Coefficients a(x,y) and b(x,y) are slowly varying func-tios of x and y compared with the sinusoidally varyingterm. fo is the spatial carrier frequency, which is near-ly equal to the inverse of the spacing of the grating inplane R. If the carrier is fine enough, coefficientsa(x,y) and b(xy) can be considered constant in each ofthe carrier intervals; they are represented by ai and biin the ith carrier interval. Furthermore, if the phases(x,y) is also assumed to be linear in the interval, thephase can be written as follows on a line of fixed y:
sp(x) = ai + Dix. (2)
Then the intensity over the ith carrier interval is givenby
gi(x) = ai + bi cos[ai + (2irfo + fli)x]. (3)
We can calculate the next integrations:r (i+1)/f0
S[gi] =J,| gi(x) sin(2irfox)dx
= b/1(4t l+ F 1 1=bi f4f+ i - sin pi sinG3li/2fo), (4)
coefficient 27ro/(27rfo + hi) on the right-hand side isnearly unity. We then find
S[gi]Pi = -tan- C[] - (8)
In such a way, the phase over every interval of thecarrier is successively determined along a scanning lineat a restricted principal value ranging from -r/2 to7r/2. By using knowledge about the S and C, phasevalues are determined between -7r and r. Phase dis-continuities are automatically compensated by soft-ware when the absolute value of the phase differencebetween two adjacent carriers is less than 7r. The samecalculations are done for the required number of scan-ning lines along the y direction.
Although in the above description we have assumeda sinusoidal varying pattern in Eq. (1), it is not essen-tial because the effects of higher harmonics involved inthe image of the grating are almost eliminated in theintegral calculations of Eqs. (4) and (5) by orthogonali-ty of trigonometric functions. It is no trouble to use anonsinusoidal pattern such as a Ronchi grating as willbe shown later in the experiment.
Ill. Relationship Between Phase and Height
In Fig. 1 we consider plane Q normal to the opticalaxis of the projection lens. A grating image on plane Qis regular but that on plane R is modulated, that is, thespacing of the imaged grating lines varies as a functionof x. The grating image on plane R is written as
g0(x) = a + b cos[27rfox + p(x)]. (9)
First, we derive phase modulation p 0(x). Letp' be thespacing of the regular grating and f = lp' be thespatial frequency on plane Q. Spatial frequency fo isdetermined as equal to the reciprocal of fringe spacingpo in plane R, that is, po = p'/cosO, when we assume theregular grating in plane Q is illuminated from infinity.In practice, the grating pitch in plane R becomes coarseas point C on the x axis departs from origin 0. Thisdeviation causes phase modulation and is equal to BCwhere ray PC crosses with plane Q at point A and itsperpendicular crosses with plane R at point B. From asimple geometrical relationship, we obtain
C[g,] =) g,(x) cos(27rfox)dx
=b (4l+ d + c )Cos pis sin(Oi/2fo), (5)
where
- 2i+ 1(Pi = i + 2f0 #i (6)
is the phase value at the middle point of the ith carrier.The ratio of Eqs. (4) and (5) gives
S[g] 2,rf, -
C~rgi] 27rf0 + pi tanso,. (7)
If the carrier frequency o is sufficiently large, the
-X 2 sing costBC = DOB - OC_ = 1l + x sint9 cosa (10)
Then the phase modulation generated in plane R isgiven by
2irfox2 sino cosopo(x) = 2rfoBC 1 + x sinO cosal (11)
Figure 2 shows the function (po(x) when fo = 0.156lines/mm, lo = 2043 mm, do = 610 mm, and 0 = 16.6°,which are the values used in the experiments.
Next we consider the case in which the object has aheight variations of h(x,y). h(x,y) is found to be posi-tive when the surface to be measured is on the left sideof reference plane R. In Fig. 1, ray PC reaches theobject at point H which is seen to be point D in plane R.
15 May 1986 / Vol. 25, No. 10 / APPLIED OPTICS 1631

0.
.24
J
'0
E
CU Cn ~~-30 ±-C I-
Fig. 2. Phase modulation in reference plane R along the x axis,expressed in Eq. (11).
From the similarity of triangles AICD and AIHPI, weobtain
CD doy)h(x,y) lo -h(x,y)
DEFORMED CAMERAGRATING PATTERN] RA CONTRO
|FLOPPY ||MICROCOMPUTERDISK ~PC -980
Fig. 3. Schematic diagram of the experimental setup.
m
642
(12)
The phase difference corresponding to distance CD isgiven by
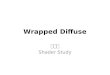
Fig. 4. Resultant height distribution of a palster bust.
'(xy) = 27rfoCD.
Then the object height to be measured is given by10CD ' los'(x'y)
h(x,y) = J 'do + CD 27rd0f0 + z'(x,y)
(13)
(14)
On the other hand, the phase value obtained by theSPD is
,(x,y) = 27rfOBD.
E 100E 80
80C 40
'u200 50 100 150 200 250 300
Di stance mm
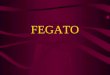
Fig. 5. Comparison of profiles of a cross section obtained by theSPD (circles) and the contact profilometer (solid line).
(15)
Consequently, to obtain height distribution, we mustuse compensated phase distribution
'(xY) = rP(x,y) - o0(x). (16)
IV. Experiments
A schematic diagram of the experimental setup isshown in Fig. 3. A slide projector was used to project a4-lines/mm Ronchi grating. A deformed grating pat-tern was observed by a TV camera with a 55-mm focallength Micro-Nikkor lens. The TV camera scans thegrating image in a 1024 X 1024 raster with an 8-bit grayscale. Irradiance data from the required number ofscanning lines were selected and transferred to themicrocomputer (PC-9801) through a camera control-ler. The optical geometry was set so that the image oforigin 0 was located in the center of the frame of theTV monitor and lo =2043mm and do = 610 mm. First,we determine phase distribution spo(x) in referenceplane R. It can be determined theoretically using Eq.(11) when the required values are determined but inpractice, it is better to determine it experimentallyusing a real reference object. An optical rail with a flatsurface was placed in the object space as the referenceobject. Spacing of the grating image on the referenceobject was 6.4 mm, which corresponded to 18 pixels onthe TV monitor. The spatial frequency Jo was auto-matically determined by averaging the spacing of thelevel crossing of the video signals near the center of theframe of the monitor. Using the value obtained, thefunctions sin(27rfox) and cos(27rfox) in Eqs. (4) and (5)
were generated in the microcomputer. The phase val-ues of the reference object obtained were stored on afloppy disk. Next the object to be measured was in-serted, and the resultant phase distribution was alsostored in the floppy disk. The differences betweenthem were substituted into Eq. (14), and the heightdistribution was determined. Even if the carrier fre-quencyfo experimentally obtained is not exactly equalto the theoretical value, it only contributes to the linearphase variation which is common in the phases calcu-lated in object and reference planes. Therefore theyare completely canceled.
Figure 4 shows an experimental result. The objectunder test was a plaster bust. In the geometricalconditions mentioned above, the height difference cor-responding to 27r phase difference was 21.5 mm in thevicinity of x = 0. Figure 5 shows the profiles of a crosssection along a scanning line in which dot marks andline profile are the results obtained by the SPD and bycontact profilometry (Moore universal measuring ma-chine M-14), respectively. They almost coincide.
V. Errors Inherent in SPD
In Sec. II, the SPD was expressed rather analytical-ly, but in practice the irradiance data given by Eq. (3)are acquired as discrete values of each pixel and arenumerically calculated. In consideration of these pro-cedures, we find that the SPD is similar at some pointsto the fringe scanning method (FSM) of Bruning.3 Inthe FSM, the phase of the interference fringes is shift-ed and 27r is divided into n equal steps which give the
1632 APPLIED OPTICS / Vol. 25, No. 10 / 15 May 1986
-30p. -20p. 0 lop, 20p. 30P.
'~~~~~~~~ it
-2

best least-squares fit of a sinusoidal function and thephase values are precisely determined. On the otherhand, in the SPD, one spatial carrier period is dividedinto n points which also give the best least-squares fitof a sinusoidal function. Both the FSM and the SPDare similar to phase detection in communication tech-niques which is used to detect signals in noise. Thereare several causes of random error, for example, back-ground noise on the object under test, electrical noisein the TV camera and controller, and so on. As forrandom errors, Bruning3 and Takeda8 presented pre-cise discussions. According to their expressions, thestandard deviation of the random errors of evaluatedphase values is given by
1, =-, (17)SEn
where S is the signal-to-noise ratio of the sampleddata. For example, when n = 32 which is the typicalvalue in our experiment and S = 10, the estimated rmserror is 0.018 rad. In the present experimental system,it corresponds to only 0.06 mm in height.
In the SPD, there is another cause of error. Thephase difference between two points at a distance ofone period of the spatial carrier is not equal to zero,because the spatial carrier is modulated. This causesa symmetric error which has the same meaning as theerror due to the approximation of Eq. (7) to Eq. (8).To estimate this error, we use the next replacement,
fi Si, = K. (18)
2-rfo 0
Then Eq. (7) is rewritten:
( = -tan-'[(l + e)K]. (19)
If phase gradient i is much smaller than spatial fre-quency fo, that is, f << 1, Eq. (19) is expanded and termshigher than third order can be neglected:
(pi= -tan-'K - rK (20)1 + K'
-20 -15 -10 -5 0
-1/4
-1/2
* 1/2
- 1/4
5 10 15 20I I I K
Fig. 6. Plot of relative phase error caused by neglecting the phasegradient, expressed in Eq. (21).
I= AVF) = i/8, (24)
where ( ) denotes the ensemble average. For example,if the phase gradient is f3i = 7rfo, it yields an estimatedrms phase error of a, = 0.18 rad, which corresponds toonly 0.6 mm in height.
VI. Conclusion
A method of automatically processing a projectedgrating to profile a 3-D diffuse object is proposed. Adeformed grating pattern on the object is regarded as aphase modulated periodic pattern. To retrieve phasemodulation, the acquired data are sinusoidally fittedusing a phase detection algorithm.
We compared our method with the FSM and FTP.In the FSM, the fringe phase is shifted so that phase 27ris divided into n steps. Therefore phase shifting de-vices and a computer with sufficient memory to storeplural frames must be used. On the other hand in theSPD, 27r of phase is spatially divided in a fringe pat-tern, so no special equipment is necessary. In compar-ison with FTP, calculations are greatly simplified.There is an intrinsic symmetric error which is dis-cussed in detail, but it can be ignored when the slope ofthe object to be measured is not very large.
Therefore the approximate error in Eq. (8) is expressedas
cK (21)1+ K2
The function Alo/e is plotted vs K in Fig. 6. From theplot it is seen that the phase error reaches extremevalues Aqo = E/2 when K = ±1. Since phase angle sp cantake any value and be considered as a random variablewith uniform distribution in the range from -7r/2 to7r/2, the probability distribution function of K is givenby
p(K)= 1 (22)r(l +K K2)
Then the probability distribution function of A/e iswritten as
p(Ap/e)= 1____ .(23)2w 1 -4(A\p/E)2
Therefore, standard deviation a, is given by
References1. H. Takasaki, "Moire Topogrpahy," Appl. Opt. 9, 1467 (1970).2. M. Idesawa, T. Yatagai, and T. Soma, "Scanning Moire Method
and Automatic Measurement of 3-D Shapes," Appl. Opt. 16,2152(1977).
3. J. H. Bruning, "Fringe Scanning Interferometers," in OpticalShop Testing, D. Malacara, Ed. (Wiley, New York, 1978), pp.409-437.
4. M. Takeda, H. Ina, and S. Kobayashi, "Fourier-Transform Meth-od of Fringe-Pattern Analysis for Computer-Based Topographyand Interferometry," J. Opt. Soc. Am. 72, 156 (1982).
5. M. Takeda and K. Mutoh, "Fourier Transform Profilometry forthe Automatic Measurement of 3-D Object Shapes," Appl. Opt.22, 3977 (1983).
6. V. Srinivasan, H. C. Liu, and M. Halioua, "Automated Phase-Measuring Profilometry of 3-D Diffuse Objects," Appl. Opt. 23,3105 (1984).
7. S. Toyooka and M. Tominaga, "Spatial Fringe Scanning for Opti-cal Phase Measurement," Opt. Commun. 51, 68 (1984).
8. M. Takeda, "Subfringe Interferometry Fundamentals," Jpn. J.Opt. 13, 55 (1984).
15 May 1986 / Vol. 25, No. 10 / APPLIED OPTICS 1633