Embed Size (px)
Citation preview
6
BAB II
STUDI PUSTAKA
2.1 Humus Media organik
Adalah bahan perekat partikel tanah yang berpengaruh untuk perekat
partikel tanah, sehingga bahan-bahan yang organik penting untuk pembentukan
struktur tanah. Humus juga bisa sebagai media tanam untuk menambah asupan
unsur hara pada tanaman, sehingga tanaman yang diberikan media tanam yang
dicampur dengan humus, akan lebih baik dari pada yang hanya memakai tanah
saja, media tanam sendiri bermacam-macam bentuknya, mulai dari media tanam
yang terbuat dari pakis, hidroponik, baik media yang menggunakan serabut
kelapa.
Pengaruh organik sangat baik terhadap pertumbuhan tanaman, dari akar
yang kuat, batang yang padat, serta daun yang sehat, akan menghasilkan tanaman
yang jauh kualitasnya lebih baik dari tanman yang menggunakan bahan
anorganik, saat ini tanaman yang ada di lahan pertanian banyak yang masih
membutuhkan bahan kimia untuk proses pembibitan ataupun penanganan
terhadap hama.
Limbah yang bisa didaur ulang juga bisa digunakan sebagai humus yang
berguna untuk meningkatkan kualitas tanaman, baik limbah kotoran ayam,
kambing, dan sapi, bisa diolah kembali menjadi salah satu humus organik alami
yang dapat menguntungkan para petani.
2.2 PLC (Programmable Logic Controller)
PLC bisa diibaratkan suatu alat yang menggantikan fungsi sebuah relay
yang dirancang untuk mengontrol suatu keadaan ataupun proses kerja suatu alat
maupun mesin-mesin industri, PLC sendiri digunakan untuk proses kontrol berupa
variabel yang bekerja secara berurutan sesuai pengalamatan yang bisa ditentukan.
Untuk perusahaan industri, mayoritas besar menggunakan PLC untuk
mengoprasikan mesin-mesin yang ada diperusahaan, karena dengan PLC bisa
terpusat dan proses kontrol bisa diamati secara RealTime, untuk lebih jelasnya
konsep kerja PLC bisa dilihat Gambar 2.1
7
Gambar 2.1. Dasar konseptual aplikasi PLC Sumber : (Setiawan, 2006)
PLC Sendiri didalamnya berisi logika-logika yang bisa kita
implementasikan kedalam program pendukung perangkat tersebut, secara
interaksi komponen yang ada didalam PLC dapat diilustrasikan dalam Gambar 2.2
Gambar 2.2. Interaksi komponen yang ada didalam PLC Sumber : (Setiawan, 2006)
2.2.1 PLC SIEMENS SIMATIC S7-1200
PLC merupakan sebuah perangkat keras dimana pengguna dapat
memberikan instruksi dan memanipulasi fungsi-fungsi untuk membuat berbagai
logika sistem. SIEMENS SIMATIC S7-1200 dalam Gambar 2.3
8
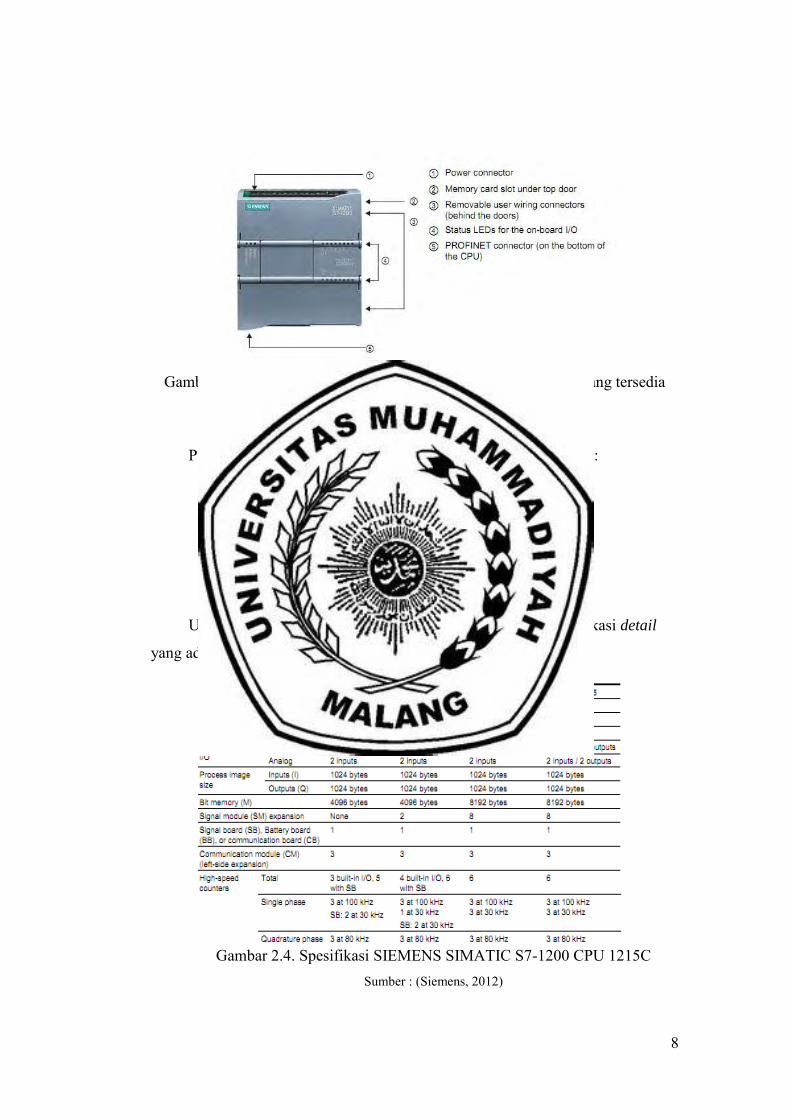
Gambar 2.3 Penampilan PLC Siemens tipe S7-1200 dengan port yang tersedia Sumber : (Siemens, 2012)
PLC Siemens S7-1200 yang digunakan mempunyai spesifikasi :
Jumlah I/O 24 buah
Jumlah Input 14 buah
Jumlah output 10 buah
Supply 24Vdc 1.5A
Untuk PLC S7-1200 menggunakan CPU 1215C dengan spesifikasi detail
yang ada didalam Gambar 2.4
Gambar 2.4. Spesifikasi SIEMENS SIMATIC S7-1200 CPU 1215C Sumber : (Siemens, 2012)

9
2.2.2 SIEMENS AUTOMATION TIA PORTAL V12
TIA PORTAL V12 merupakan software khusus untuk memprogram PLC
buatan SIEMENS. TIA PORTAL V12 merupakan salah satu software Siemens
Automation. Dengan TIA PORTAL V12 kita bisa memprogram semua PLC yang
dibuat oleh SIEMENS. Untuk lebih jelasnya software ini ada didalam Gambar 2.5
dan Gambar 2.6
Gambar 2.5 Tampilan menu utama program SIEMENS TIA PORTAL V12 Sumber : (Siemens, 2012)
Gambar 2.6 Pembuatan ladder diagram pada SIEMENS TIA PORTAL V12 Sumber : (Siemens, 2012)
10
2.2.3 Pemrograman Ladder Diagram
Diagram tangga adalah metode pemrograman PLC yang paling sering
digunakan. Instruksi dapat dibagi menjadi bagian masukan yang menyatakan
kondisi dan keluaran yang akan dieksekusi apabila kondisi terpenuhi.
Pemrograman ini berbasis logika yang biasanya diterapkan terhadap relay, yang
kondisi masukan dan keluarannya hanya dua kondisi ON atau OFF, kontrol
konveyor, lift, dan motor-motor industri contohnya. Pada perkembangannya, PLC
yang ada sekarang sudah dilengkapi dengan masukan dan keluaran analog,
biasanya berupa tegangan 0-10 V atau arus 4-20 mA.
2.2.4 Fungsi logika dan instruksi dasar pada diagram tangga
Instruksi logika yang digunakan untuk pemrograman PLC ada beberapa
yang biasa digunakan :
Logika AND – Dapat dilihat Gambar 2.7, Logika AND untuk mendapatkan
keluaran bernilai 1 pada output maka Input A dan Input B keadaan ON
Gambar 2.7 Skema kerja logika AND Sumber : (Setiawan, 2006)
Logika OR – Dapat dilihat Gambar 2.8, Logika OR untuk input A dan Input B (
keduanya) ON, maka keluaran output ON (logika 1).
Gambar 2.8 Skema kerja logika OR Sumber : (Setiawan, 2006)
11
Logika NOT – Dapat dilihat Gambar 2.9. Input A akan aktif ketika tidak aktif,
kondisi input A disebut kontak NC (normally close)
Gambar 2.9 Skema kerja logika NOT Sumber : (Setiawan, 2006)
Logika NAND – Didalam Gambar 2.10 Logika Nand akan bekerja ketika input
A dan input B sedang tidak aktif
Gambar 2.10 Skema kerja logika NAND Sumber : (Setiawan, 2006)
Logika NOR – Di dalam Gambar 2.11 dapat dilihat skema kerja logika NOR
Gambar 2.11 Skema kerja logika NOR Sumber : (Setiawan, 2006)
Logika XOR – Output OR ketika salah satu atau kedua input kondisi 1. pada
situasi-situasi tertentu, dengan menggabungkan logika-logika NOT, AND, dan
OR seperti yang ada didalam Gambar 2.12.
12
Gambar 2.12 Ladder Diagram untuk logika XOR Sumber : (Setiawan, 2006)
2.2.5 Koneksi Antar Muka Sistem dengan Penimbangan
Sistem PLC yang digunakan untuk menjalankan perintah kerja
menggunakan logika-logika dasar untuk instruksinya, sistem antar muka dari
sebuah PLC ada yang membutuhkan modul untuk menerjemahkan masukan, baik
berupa sinyal maupun arus listrik yang masuk. Untuk koneksi antar muka sistem
dengan penimbangan, yang lebih ditekankan didalam penulisan dan penelitian ini
adalah proses dimana produk humus ini ditimbang per 1 kemasan plastik, dan
mengoptimalkan kerja dari sensor Loadcell. Untuk memperjelas dapat dilihat
dalam Gambar 2.13
Gambar 2.13 Koneksi Sensor ke Modul Hx711, Board Arduino, PLC Sumber : (arduino.cc, Siemensweb)
Untuk sensor Loadcell sendiri tidak bisa langsung menjadi input kedalam
PLC, harus ada penerjemah sinyal yaitu menggunakan modul yang dibuat untuk
sensor penimbangan ini, HX711 ini menjadi antar muka koneksi dari sensor
menuju sistem, untuk arduino berfungsi menentukan kalibrasi yang diberikan,
untuk mencapai batasan timbang yang ditentukan dari awal, setelah itu
memberikan perintah yang akan dikerjakan oleh PLC.
13
2.3 HMI (Human Machine Interface)
Adalah alat komunikasi antara manusia dengan sistem, dan juga alat untuk
menerjemahkan bahasa perintah yang diinstruksikan sebuah alat kontrol, untuk
menjalankan perintah kerja.
2.3.1 HMI SCHNEIDER MAGELIS GTO2300
Perangkat keras yang dapat mempermudah pengguna memonitoring dan
menjalankan perintah kerja, untuk spesifikasi dari HMI MAGELIS GTO2300
ditunjukkan didalam Gambar 2.14
Gambar 2.14 Spesifikasi HMI MAGELIS GTO2300 Sumber : (schneider-electric)
Pada HMI MAGELIS GTO2300 milik Schneider, untuk komunikasi yang
digunakan ada berberapa jenis, yaitu Port RS232, Port RS 485, dan USB, dan
daya yang dibutuhkan untuk menyalakan HMI ini sebesar 24VDC. Penampilan
HMI dilihat dalam Gambar 2.15

14
Gambar 2.15 Tampilan HMI tampak depan Sumber : (schneider-electric/magelis-gto/)
Pada tampilan depan HMI ini, tersedia tombol Touch Screen display dan
indikator Led yang ada di pojok kiri bawah.
Gambar 2.16 Tampilan HMI tampak belakang Sumber : (schneider-electric/magelis-gto/)
Untuk tampilan HMI tampak belakang yang ada didalam Gambar 2.15
tersidia port komunikasi yaitu USB1, RS232 di COM1, RS485 di COM2, dan
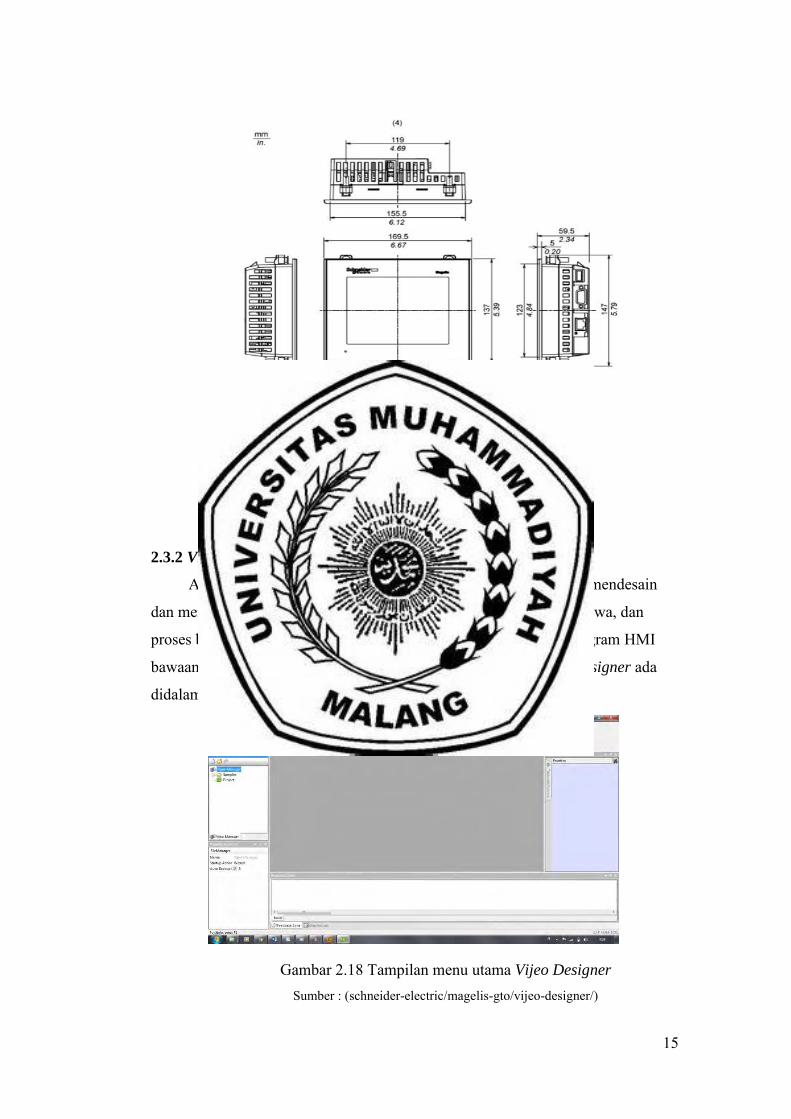
mini USB di USB2.Dimensi yang dimiliki HMI GTO2300 dalam Gambar 2.17
15
Gambar 2.17. Dimensi HMI GTO2300 Sumber : (schneider-electric/magelis-gto/)
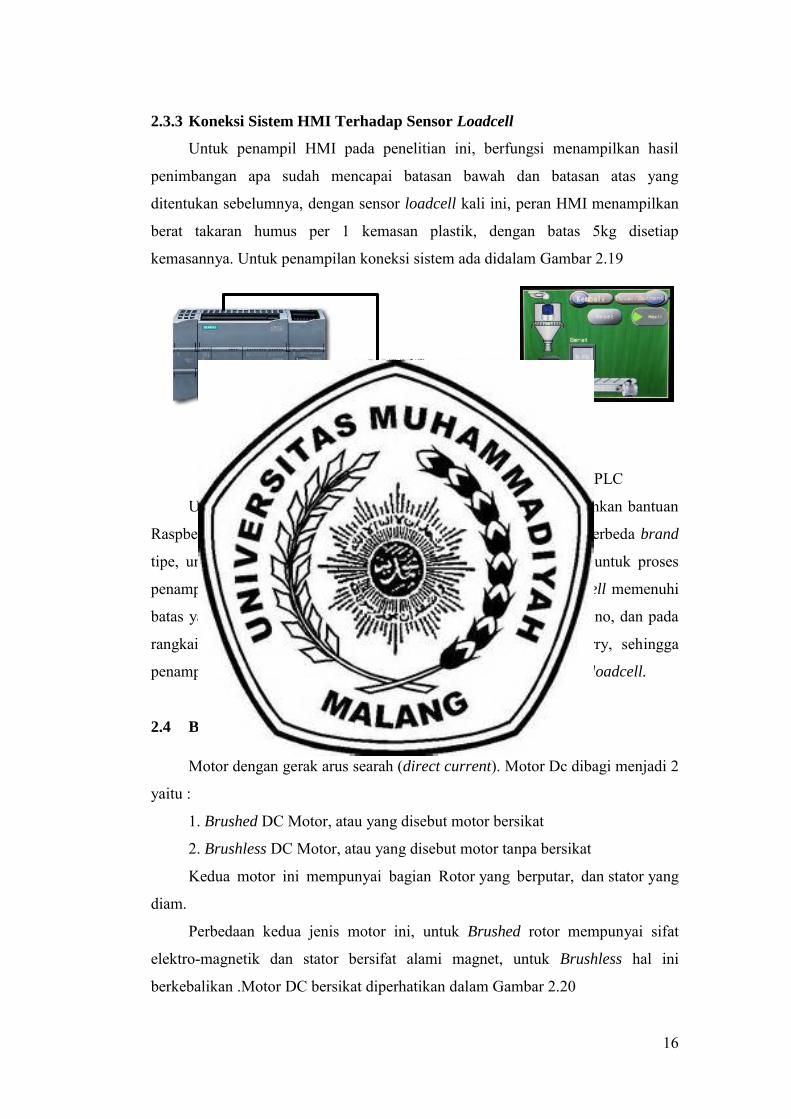
2.3.2 Vijeo designer
Adalah sebuah program penampil HMI yang digunakan untuk mendesain
dan menvisualisasikan sebuah proses kerja, keadaan, kejadian, peristiwa, dan
proses berjalannya sebuah kegiatan kerja, Vijeo Designer adalah program HMI
bawaan dari Schneider,untuk tampilan menu utama program vijeo designer ada
didalam Gambar 2.18
Gambar 2.18 Tampilan menu utama Vijeo Designer
Sumber : (schneider-electric/magelis-gto/vijeo-designer/)
16
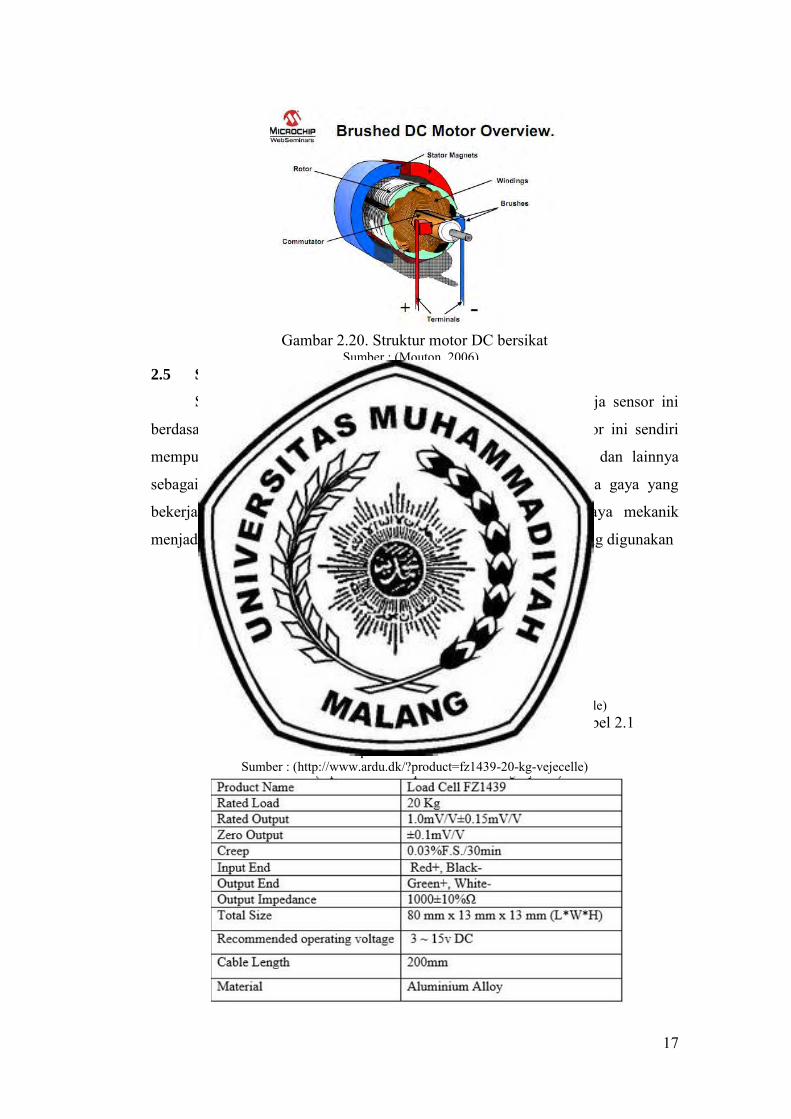
2.3.3 Koneksi Sistem HMI Terhadap Sensor Loadcell
Untuk penampil HMI pada penelitian ini, berfungsi menampilkan hasil
penimbangan apa sudah mencapai batasan bawah dan batasan atas yang
ditentukan sebelumnya, dengan sensor loadcell kali ini, peran HMI menampilkan
berat takaran humus per 1 kemasan plastik, dengan batas 5kg disetiap
kemasannya. Untuk penampilan koneksi sistem ada didalam Gambar 2.19
Gambar 2.19 Koneksi Penampil HMI terhadap Sistem PLC
Untuk koneksi penampil HMI terhadap sistem PLC membutuhkan bantuan
Raspberry untuk menerjemahkan bahasanya, karena kedua device berbeda brand
tipe, untuk HMI bermerk schneider sedangkan PLCnya Siemens, untuk proses
penampil penimbangan akan menampilkan 5kg ketika sensor loadcell memenuhi
batas yang ditentukan, maka sensor akan mengirmkan data ke arduino, dan pada
rangkaian yang terhubung ke arduino akan dipararel ke raspberry, sehingga
penampil HMI akan menampilkan berat yang mencapai batasan dari loadcell.
2.4 Brushed DC Motor
Motor dengan gerak arus searah (direct current). Motor Dc dibagi menjadi 2
yaitu :
1. Brushed DC Motor, atau yang disebut motor bersikat
2. Brushless DC Motor, atau yang disebut motor tanpa bersikat
Kedua motor ini mempunyai bagian Rotor yang berputar, dan stator yang
diam.
Perbedaan kedua jenis motor ini, untuk Brushed rotor mempunyai sifat
elektro-magnetik dan stator bersifat alami magnet, untuk Brushless hal ini
berkebalikan .Motor DC bersikat diperhatikan dalam Gambar 2.20
17
Gambar 2.20. Struktur motor DC bersikat Sumber : (Mouton, 2006)
2.5 Sensor load cell
Sensor ini disebut juga sensor mekanis, karena prinsip kerja sensor ini
berdasarkan perubahan gerak mekanis, yaitu tekanan. Untuk sensor ini sendiri
mempunyai 4 kabel, dimana 2 kabel berfungsi sebagai eksitasi dan lainnya
sebagai keluaran.Sensor ini juga disebut sebagai tranduser, karena gaya yang
bekerja dengan prinsip deformasi, akibat adanya perubahan gaya mekanik
menjadi sinyal listrik. Gambar 2.21 menunjukkan sensor loadcell yang digunakan
Gambar 2.21. Sensor load cell tipe shear FZ1439
Sumber : (http://www.ardu.dk/?product=fz1439-20-kg-vejecelle) Spesifikasinya Sensor load cell tipe FZ1439 didalam Tabel 2.1
Tabel 2.1 Spesifikasi sensor load cell FZ1439 Sumber : (http://www.ardu.dk/?product=fz1439-20-kg-vejecelle)

18
2.6 Arduino UNO
Board mikrokontroller yang didalamnya tertanam Atmega328, layaknya
mikrokontroller lainnya, Arduino ini mempunyai 14 pin digital I/O . Untuk
penampilan jelasnya didalam Gambar 2.22
Gambar 2.22 Device Arduino tipe UNO Board
Sumber : ( Data Sheet Uno & Front, n.d.)
2.7 Raspberry Pi 3 Model B
Adalah generasi ketiga Raspberry Pi. Raspberry merupakan komputer papan
tunggal atau yang biasa dipanggil (single-board circuit; SBC). Untuk lebih
jelasnya dapat dilihat didalam Gambar 2.23 model Raspberry yang digunakan,
dan untuk spesifikasi dari board Raspberry dapat dilihat didalam Gambar 2.24
Gambar 2.23 Single Board circuit Raspberry Pi 3 Model B Sumber : ( Data sheet Raspberry Lpddr & Bcm, 2016)
Spesifikasi Raspberry Pi dapat dilihat didalam Gambar 2.24
Gambar 2.24 Spesifikasi Single Board circuit Raspberry Pi 3 Model B Sumber : (Lpddr & Bcm, 2016)
19
2.8 Konveyor
Konveyor adalah alat yang memudahakan untuk proses pegangkutan
maupun perpindahan suatu barang atau bahan-bahan undustri yang berbentuk
padat, konveyor juga bisa dibilang sebagai alat transportasi barang yang
memudahkan dan meminimalis tenaga manusia untuk proses produksi, pemilihan
pemakaian konveyor antara lain tergantung pada :
1. Jumlah material yang diangkut.
2. Luasan Pemindahan material.
3. Arah tujuan dimana material dibawa.
4. Ketinggian.
5. Proses yang diinginkan selain pengangkutan.
6. Umur alat.
7. Harga.
8. Ukuran material (size), bentuk material (shape).
9. Sifat (properties).
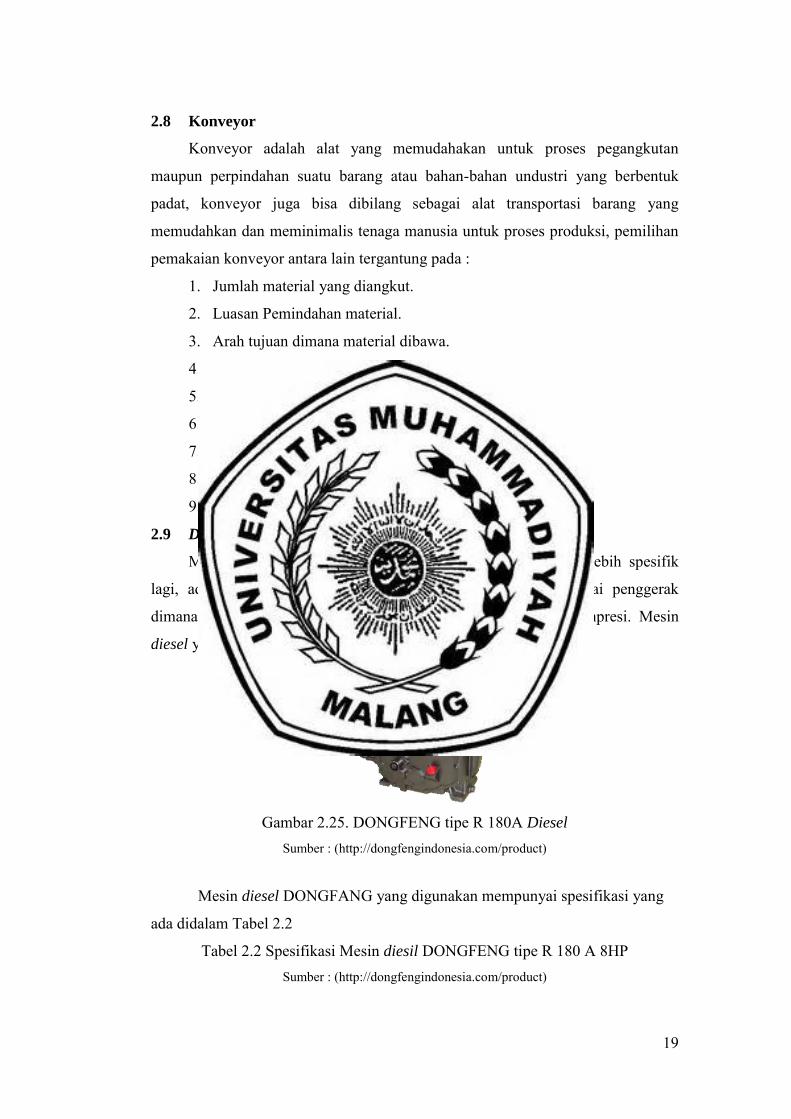
2.9 Diesel Engine
Mesin pembakaran yang menggunakan bahan bakar solar, lebih spesifik
lagi, adalah mesin pemicu tekanan kompresi, diesel juga sebagai penggerak
dimana bahan bakar dinyalakan oleh suhu tinggi gas yang dikompresi. Mesin
diesel yang digunakan, ditampilkan dalam Gambar 2.25
Gambar 2.25. DONGFENG tipe R 180A Diesel Sumber : (http://dongfengindonesia.com/product)
Mesin diesel DONGFANG yang digunakan mempunyai spesifikasi yang
ada didalam Tabel 2.2
Tabel 2.2 Spesifikasi Mesin diesil DONGFENG tipe R 180 A 8HP Sumber : (http://dongfengindonesia.com/product)
20
Tenaga Maksimum 8 HP
Tenaga Kontiniu 7.5 HP
RPM 2600
Berat Bersih 70Kg
2.10 Motor induksi 1 Phase
Adalah motor listrik yang bekerja di jalur listrik AC atau arus listrik bolak-
balik, motor ini mempunyai putaran rotor yang berbeda dengan putaran statornya,
atau yang disebut Slip karena ada selisih putarannya.
Motor induksi 1 fasa biasanya digunakan sebagai penggerak peralatan yang
memerlukan daya yang rendah, dan kecepatan yang konstan. Karena motor
induksi 1 fasa memiliki kelebihan, kecepatan putar yang konstan terhadap
perubahan beban, dan konstruksi yang sederhana. Untuk lebih jelasnya ada
didalam Gambar 2.26
Gambar 2.26. Detail umum motor induksi 1 fasa Sumber : (Sinaga, 2011)
2.11 Motor DC 12V
Motor yang digunakan adalah motor yang dipakai untuk wipper mobil yaitu
motor DC WD 1160/1160B, dapat dilihat didalam Gambar 2.27, 2.28, 2.29, 2.30
Gambar 2.27 Motor DC WD 1160 Sumber : (Gearbox, n.d.)
21
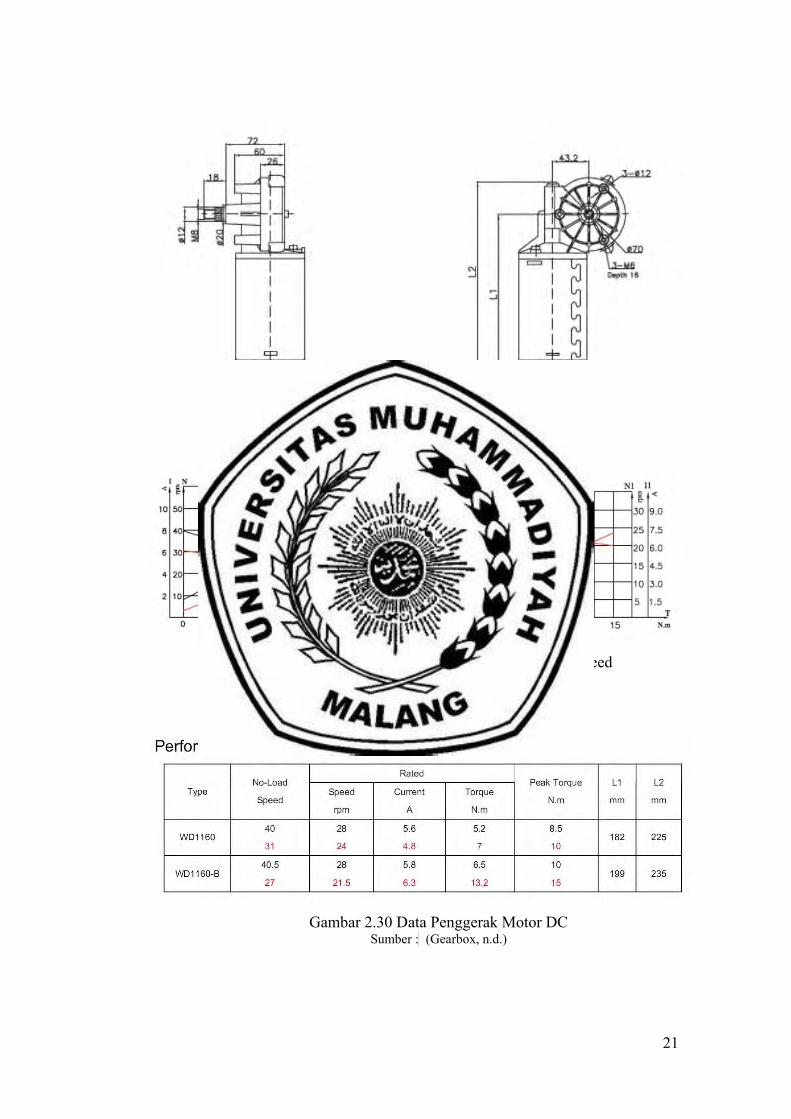
Gambar 2.28 Dimensi Motor DC Sumber : (Gearbox, n.d.)
BLK High Speed RED Low Speed
Gambar 2.29 Grafik Motor DC Sumber : (Gearbox, n.d.)
Gambar 2.30 Data Penggerak Motor DC Sumber : (Gearbox, n.d.)