Embed Size (px)
Citation preview

Bar Elements in 2-D Space
By
S. Ziaei Rad

Distributed Load
=
Uniformly distributed axial load q (N/mm, N/m, lb/in) can
be converted to two equivalent nodal forces of magnitude qL/2.
We verify this by considering the work done by the load q,

Distributed Load
that is, where
Thus, from the U=W concept for the element, we have

Distributed Load
The new nodal force vector is
In an assembly of bars,
=

Bar Elements in 2-D
Note: Lateral displacement
does not contribute to the
stretch of the bar, within the
linear theory.

Transformation
In matrix form,
or, where the transformation matrix
is orthogonal, that is,

Transformation
For the two nodes of the bar element, we have
or,
The nodal forces are transformed in the same way,

Stiffness Matrix in the 2-D
SpaceIn the local coordinate system, we have
Augmenting this equation, we write
or
,
Stiffness Matrix in the 2-D
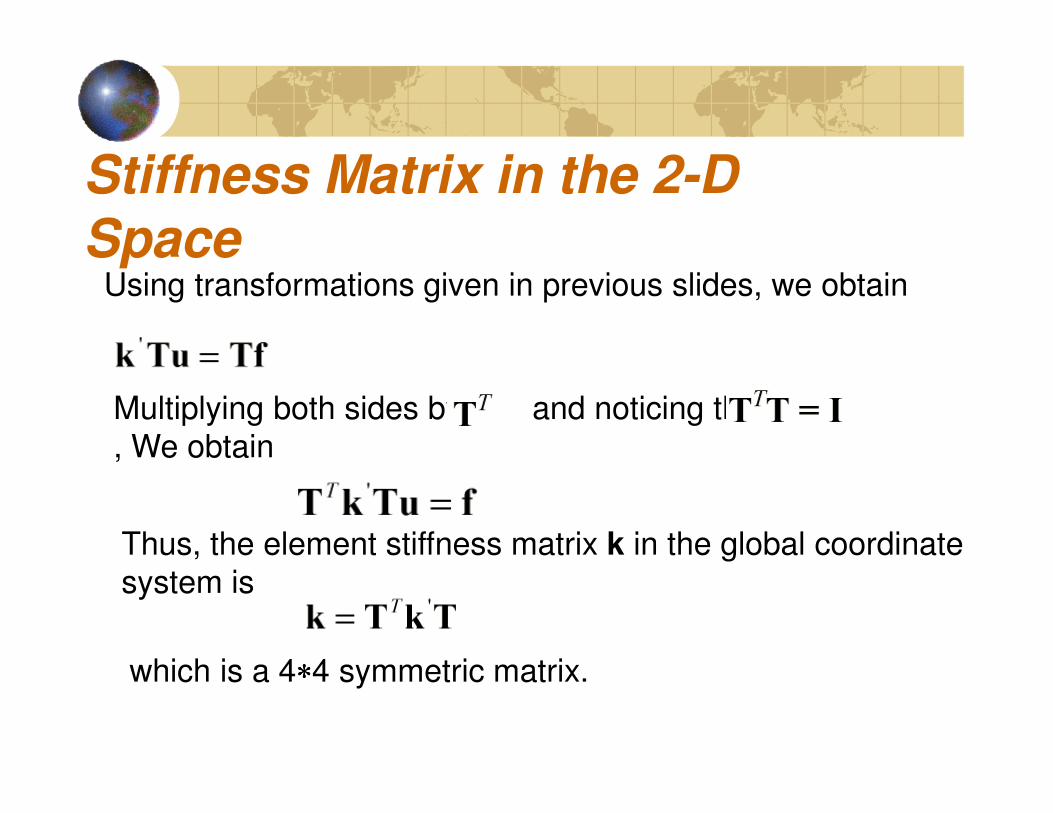
SpaceUsing transformations given in previous slides, we obtain
Multiplying both sides by and noticing that
, We obtain
Thus, the element stiffness matrix k in the global coordinate
system is
which is a 4∗∗∗∗4 symmetric matrix.

(*)
Stiffness Matrix in the 2-D
SpaceExplicit form
Calculation of the directional cosines l and m:
Note:The structure stiffness
matrix is assembled by
using the Element stiffness
matrices in the usual way a
in the 1-D case.

Assembly Rules
1. Compatibility: The joint displacements of all
members meeting at a joint must be the same.
2. Equilibrium: The sum of forces exerted by all
members that meet at a joint must balance the
external force applied to that joint.
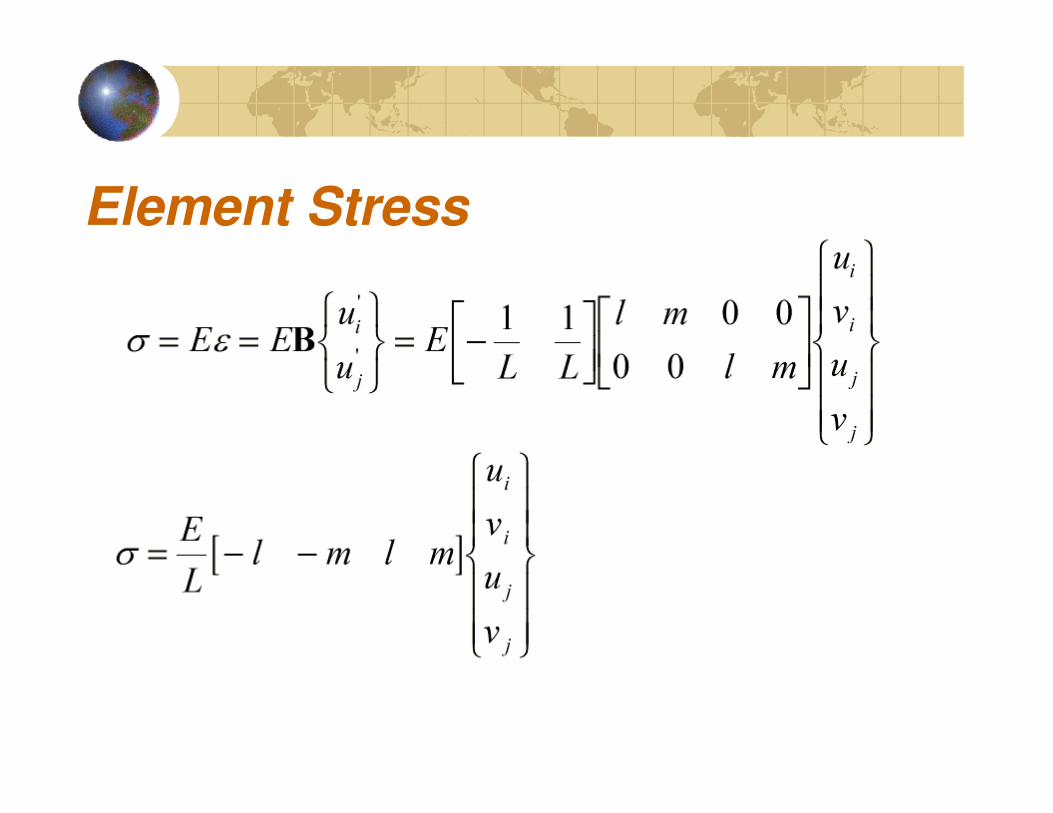
Element Stress

The Direct Stiffness Method (DSM)
Steps

Example 2.3
Problem: A simple plane truss is made
of two identical bars (with E, A, and L),
and loaded as shown in the figure. Find
1) displacement of node 2;
2) stress in each bar.

Example 2.3 (Member formation)
In local coordinate systems, we have
These two matrices cannot be assembled together, because they
are in different coordinate systems. We need to convert them to
global coordinate system OXY.
Solution: This simple structure is used here to
demonstrate the assembly and solution process using
the bar element in 2-D space.

Example 2.3 (Globalization)
Element 1:
Using formula (*), we obtain the stiffness matrix in the
global system

Example 2.3 (Globalization)
Element 2:
Using formula (*), we obtain the stiffness matrix in the
global system

Example 2.3 (Merge or Assembly)
Assemble the structure FE equation,

Example 2.3 (Application of BCs and
Solution)Load and boundary conditions (BC):
Condensed FE equation,
Solving this, we obtain the displacement of node 2,

Example 2.3 (Recovery)
Using formula for stress, we calculate the stresses in the two bars

Example 2.4
Problem: For the plane truss shown ,
Determine the displacements and
reaction forces.
Solution: We have an inclined roller
at node 3, which needs special attention in the FE solution.
We first assemble the global FE equation for the truss.

Example 2.4Element 1:

Example 2.4
Element 2:

Example 2.4Element 3:

Example 2.4The global FE equation is,

Example 2.4Load and boundary conditions (BC):
From the transformation relation and the BC, we have
that is, This is a multipoint constraint (MPC).

Example 2.4
Similarly, we have a relation for the force at node 3,
that is,

Example 2.4Applying the load and BC’s in the structure FE equation
by ‘deleting’1st , 2nd and 4th rows and columns, we have
Further, from the MPC and the force relation at node 3, the
equation becomes,

Example 2.4
which is
The 3rd equation yields,
Substituting this into the 2nd equation and rearranging, we have

Example 2.4
Solving this, we obtain the displacements,
From the global FE equation, we can calculate the reaction
forces,

Example 2.4
A general multipoint constraint (MPC) can be described as,
where are constants and are nodal
displacement
components. In the FE software, such as ANSYS or
MSC/NASTRAN, users only need to specify this relation
to the software. The software will take care of the
solution.

THERMOMECHANICAL EFFECTS
The assumptions up to now based on the idea that truss elements
result in zero external forces under zero displacements. This is
implicit in the linear-homogeneous expression of the master stiffness
equation f = Ku.
If u vanishes, so does f. This behavior does not apply, however,
if there are initial force effects.
If those effects are present, there can be displacements without
external forces, and internal forces without displacements.

THERMOMECHANICAL EFFECTS
A common source of initial force effects are temperature changes.
Imagine that a plane truss structure is unloaded (that is, not
subjected to external forces) and is held at a uniform reference
temperature. External displacements are measured from this
environment, which is technically called a reference state. Now
suppose that the temperature of some members changes with respect
to the reference temperature while the applied external forces
remain zero. Because the length of members changes on account of
thermal expansion or contraction, the joints will displace.

Initial Force Effects (also called Initial
Strain
& Initial Stress Effects by FEM authors)
� Thermomechanical effects
� Moisture effects
� Prestress effects
� Lack of fit
� Residual stresses
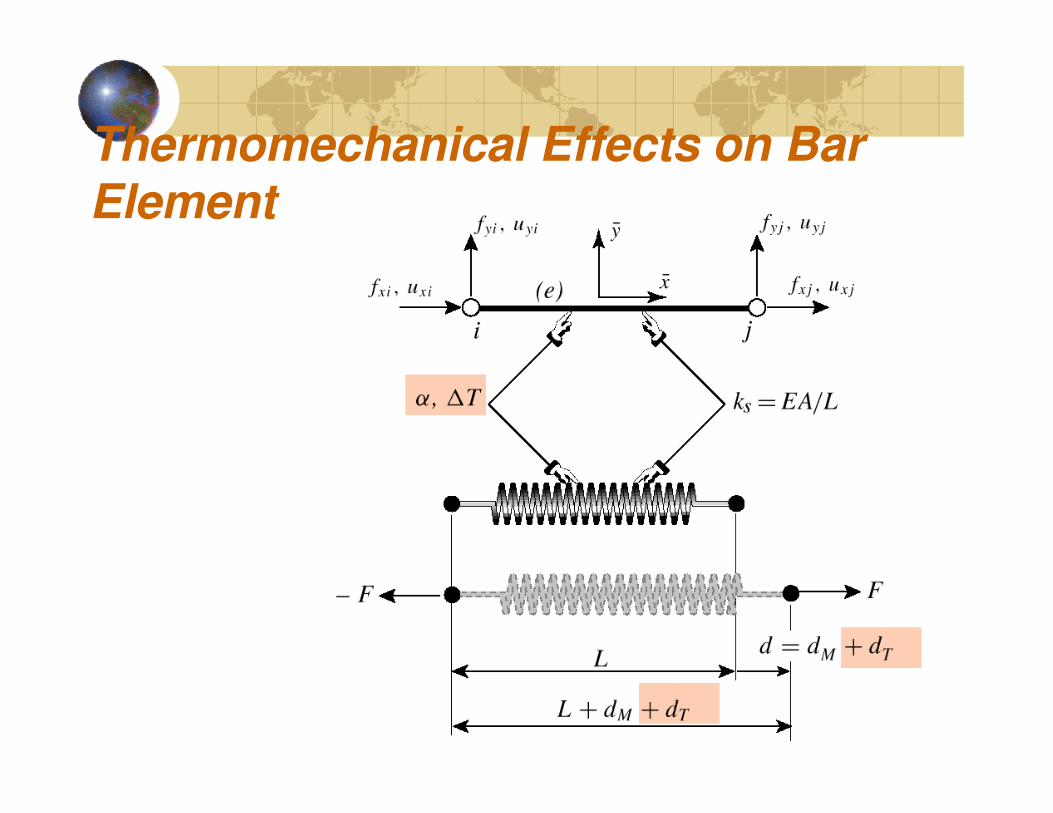
Thermomechanical Effects on Bar Element

Thermomechanical Effects on Bar
ElementAxial strain is sum of mechanical and thermal:

Incorporating Thermomechanical Effects into the Element Stiffness Equations

Generalization: Initial Force Effects
Where does come from? Thermal effects, moisture,
prestress, lack of fit, residual stresses, some nonlinearities.
Common property: if displacements u vanish
IMIM ffff −=⇒=+ 0
There are (self-equilibrating) mechanical forces in the
absence of displacements

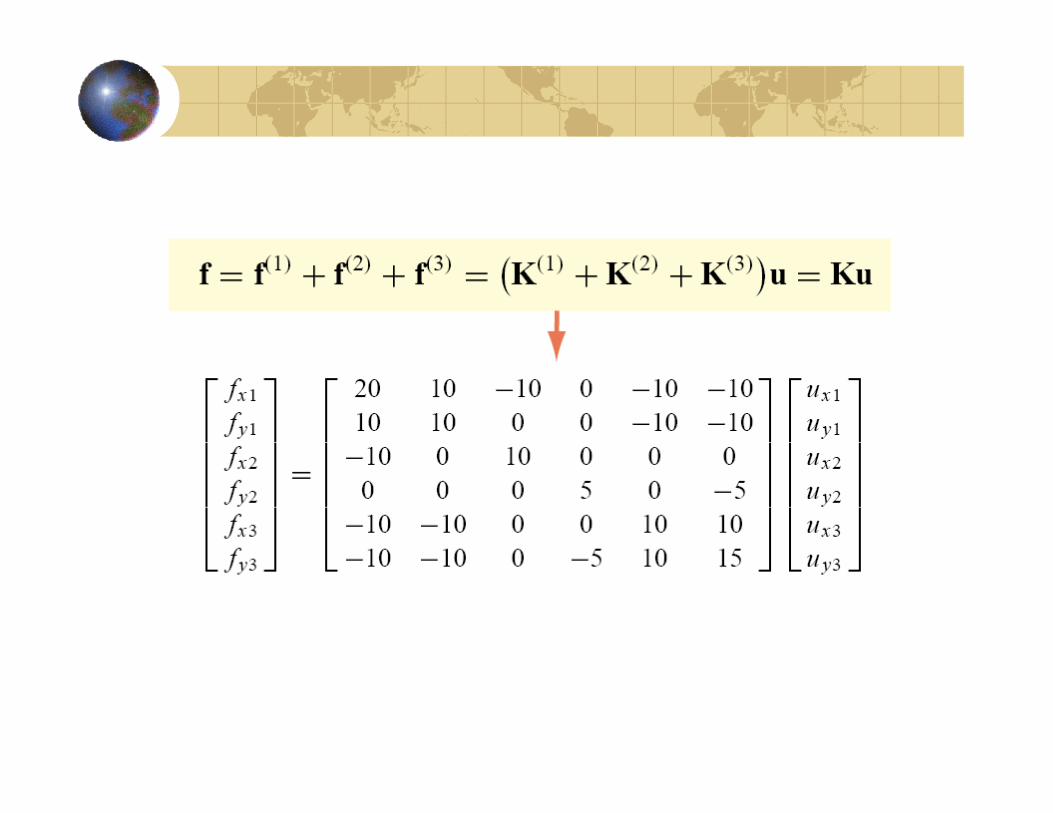


Suppose that the example truss is now unloaded. However the
temperature of members (1) (2) and (3) changes by T ,−T and 3T ,
respectively, with respect to Tref .
The thermal expansion coefficient of all three members is assumed
to be α.
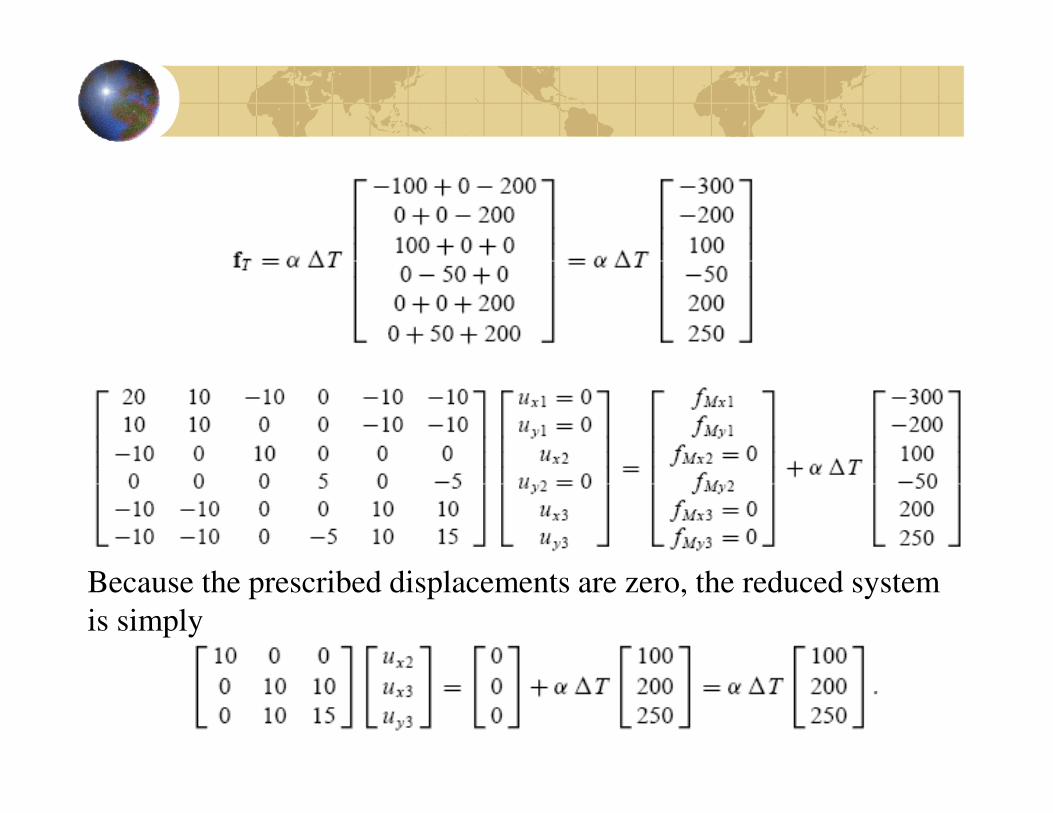
Because the prescribed displacements are zero, the reduced system
is simply

Solving

Treating Initial Force Effects

How to Write a Simple MATLAB Program for 2D bar
PreprocessorNodes, Elements ,Members Properties (Geometry, Material)
Element Stiffness Matrices(Local Coordinates)
Element Stiffness Matrices(Global Coordinates)
Forming Global Stiffness Matrix and Force Vector
Apply the B.C.
Solution Phase
Postprocessing

A MATLAB Program
Clear
Node=[
node_no1 x1 y1
node_no2 x2 y2
………………];
Element=[
elem_no node_no1 node_no2 length theta E A
………………];
BCdof=[…………………];
F_global=[ fx1 fy1 fx2 fy2 …………………]’;
Connectivity=[
elem_no Dof1 Dof2 Dof3 Dof4
………………];
(NN,MN)=size(Node) ;
(NE,ME=size(Element);
K_global=zeros(NN*2,NN*2);

A MATLAB Program
for i=1:NE
Ke_local=Kelocal (Element(i,4), Element(i,6), Element(i,7)); % Kelocal is a Matlab function
Te_rotatoin=T_rotation(Element(i,5)); % T_rotation is a Matlab function
Ke_global==Te_rotation'*ke_local*Te_rotation;
ke_assemble=Assemble(Ke_global,Connectivity(i,:),NN); % Assemble is a Matlab function
K_global= K_global+ke_assemble
end
% F_global=[ fx1 fy1 fx2 fy2 …………………]’;
% Assume that the external forces are in global coordinates
% If they are in local coordinates then they have to transfer using
% F_global=Te_rotation*Fe_local
% Applying the B.C
K_globalBC=Boundry_conditionK(K_global,BCdof)
F_globalBC=Boundry_conditionF(F_global, BCdof)
% Solution Phase
U=inv(K_globalBC)*F_globalBC;

A MATLAB Program
% Postprocessing Phase
for i=1:NE
stress(i)=Stress_calc(U, Element(i,2), Element(i,3),Element(i,4), Element(i,5) );
end
% end of the program
end