Embed Size (px)
Citation preview

Contents lists available at ScienceDirect
Acta Astronautica
Acta Astronautica 104 (2014) 91–98
http://d0094-57
n CorrE-m
yudintsURL
journal homepage: www.elsevier.com/locate/actaastro
Behavior of tethered debris with flexible appendages
Vladimir S. Aslanov n, Vadim V. Yudintsev34, Moskovskoye shosse, Samara 443086, Russia
a r t i c l e i n f o
Article history:Received 29 January 2014Received in revised form21 July 2014Accepted 23 July 2014Available online 30 July 2014
Keywords:Active debris removalTetherSpace tugRelative motionFlexible appendagesVibrations
x.doi.org/10.1016/j.actaastro.2014.07.02865/& 2014 IAA. Published by Elsevier Ltd. A
esponding author.ail addresses: [email protected] (V.S. [email protected] (V.V. Yudintsev).: http://aslanov.ssau.ru (V.S. Aslanov).
a b s t r a c t
Active exploration of the space leads to growth of a near-Earth space pollution. Thefrequency of the registered collisions of space debris with functional satellites highlyincreased during last 10 years. As a rule a large space debris can be observed from theEarth and catalogued, then it is possible to avoid collision with the active spacecraft.However every large debris is a potential source of a numerous small debris particles. Toreduce debris population in the near Earth space the large debris should be removed fromworking orbits. The active debris removal technique is considered that intend to use atethered orbital transfer vehicle, or a space tug attached by a tether to the space debris.This paper focuses on the dynamics of the space debris with flexible appendages.Mathematical model of the system is derived using the Lagrange formalism. Severalnumerical examples are presented to illustrate the mutual influence of the oscillations offlexible appendages and the oscillations of a tether. It is shown that flexible appendagescan have a significant influence on the attitude motion of the space debris and the safetyof the transportation process.
& 2014 IAA. Published by Elsevier Ltd. All rights reserved.
1. Introduction
The first Russian Sputnik satellite that was launched in1957, stayed in orbit for 3 months only. In the last halfcentury more than six thousand spacecraft were launchedto the Earth orbits and many of them remain in orbit.There are more than 15,000 large objects on the orbitsaround the Earth. Only 7% of these are active spacecraft,17% are nonfunctional spacecraft and 13% are orbital stagesof the rockets [1]. All these objects are tracked and anactive spacecraft or a space station can avoid collision withsuch objects. Collisions of the large space debris with otherdebris can significantly increase numbers of the smalldebris on the Earth orbit. The Fengyun 1C anti-satellitetest [2] and the Cosmos-Iridium collision [3] created over5000 small objects [4]. The debris cascade effect described
ll rights reserved.
ov),
by Kessler [5] has begun to occur. Several orbits can bedangerous for the new missions therefore large debrisshould be removed. Removal of five or more large debrisper year can reduce the debris population [6].
Over the last years several active debris removal meth-ods were developed [7–14]. In Fig. 1 one of the possibleclassifications of the active debris removal is shown. Thereare three types of the connection between a space tug and aspace debris: flexible connection, rigid connection anddistant interaction. The last case applies to the techniquesbased on the idea of thrusting a space debris by irradiatingit with an ion beam [15]. Rigid connection between aspace tug and a debris can be realized by robot arm. Theflexible connection can be provided by a tether attachedto the space debris.
In our opinion, the tethered transportation with thepulling space tug has the following advantages over therigidly connected space tug and space debris:
�
Lower requirements for the tug's control system,because of natural stability of the pull scheme [1].
Active Debris Removal
Link type Docking Type TransportationType
Harpoon
Net
Adhesive force
Hard dockinglinkage
Manipulator
Thruster
Drag augmentation
device
Hybrid
MomentumExchange
Flexible
Rigid
Distant Eradiation
Tentacle-like gripping mechanism Magnetic fields
Fig. 1. Active debris removal classification.
V.S. Aslanov, V.V. Yudintsev / Acta Astronautica 104 (2014) 91–9892
�
Transportation is safe for the space tug: in the case ofbreaking of connection with the debris the transporta-tion attempt can be repeated.The active debris removal mission can be divided intoseveral stages specified by the motion pattern of the spacetug relative to the space debris [7]:
1.
Placing the space tug into orbit. 2. Far-range rendezvous between the space tug and thedebris.
3. Rendez-vous phase. 4. Mechanical interfacing (docking, grapping, etc.). 5. De-tumbling and orientation of the space debris. 6. Thruster-burn phase. 7. De-orbitation (post-burn) phase. 8. Enter to the atmosphere.Each stage requires a different mathematical model. Notethat mathematical models for the steps 1–3, 7 and 8 arewell known. To analyze these steps do not require thecreation of any new models in addition to the existingmodels of the orbital motion of the spacecraft.
Post-burn phase is considered in [16–18] where thrus-ter input shaping techniques are discussed to reduce thepost-burn relative motion between space tug and spacedebris. The motion of the tug–tether–debris system as a
material point, assuming stationarity of the relative motionof the tug and the debris for the stage 7, can be described bydifferential equations in the osculating parameters [19]. Theatmospheric entry can be analyzed using the mathematicalmodels presented in [20,21].
The choice of the active debris removal techniquedepends on the properties of the space debris. Ref. [1]notes that there are two types of the space debris: space-craft or orbital stages. Orbital stages are more “comfortable”for the deorbit, because they do not have large appendages(solar panels, antennas).
The removal of passive spacecraft with flexible appen-dages is a more complex problem. The possibility of avibration of flexible appendages should be considered thatmay lead to the destruction of the spacecraft and theemergence of an even greater number of small fragments.
In this paper we draw attention to the stage 6 of theactive removal of a space debris with flexible appendages.The aim of the present work is to derive a mathematicalmodel to perform a research on the influence of flexibleappendages of space debris (passive spacecraft) to theinitial phase of the deorbit process. We consider the simpleimpulsive burn of the tug's thrust. As noted above, inputshaping techniques can be used to reduce the post-burnrelative motion between space tug and space debris [17].An alternative solution to remove collision potential is theuse of post-burn manoeuvre of the space tug after detach-ing the tether to establish a safe relative orbit of the tug.

V.S. Aslanov, V.V. Yudintsev / Acta Astronautica 104 (2014) 91–98 93
We suppose that a thrust force acting on the space tugprovides torque much greater magnitude compared to thegravitational torque. Ref. [22] considers the dynamics oflarge debris with flexible appendages, but the flexibleappendages are modeled as rigid bodies connected to thespace debris with viscoelastic joints. In our paper flexibleappendages are considered as in-plane bending homo-geneous beams.
The paper has two main sections. In the next sectionthe motion equations of the space debris with flexibleappendages are formulated. In the later section theseequations are used to explore the motion of the systemin several cases in terms of numerical simulation.
This paper continues our research in [23,24] where theattitude motion of the space debris is considered as a rigidbody without flexible appendages in a space withoutgravity [24] and in a central gravitational field [23].
2. Equations of the space debris with flexible appendages
2.1. Lagrange formalism and generalized coordinates
The equations of motion of the debris relative to thespace tug can be written using the Lagrange or Newton–Euler formalism. The obvious advantages of this methodare the minimal set of generalized coordinates describingthe configuration of the system, the possibility of conduct-ing analytical studies, their linearization and simplifica-tion. Also, it is simple to incorporate the flexing dynamicsusing the Lagrange formalism.
To analyze the safety of orbital transportation processthe relative motion of the debris and the space tug shouldbe considered. From this point of view the motion equa-tion should be written in the orbital coordinate systemwith origin in the center of mass of the system (tug þtether þ debris).
The non-inertial effects are systematically neglected asfar as a short period of time of the de-orbit stage is studied(from the space tug's thruster burn). The motion of thesystem's center of mass can be described using equationsfor osculating orbital elements [23].
The configuration of the considered system is describedby the following set of generalized coordinates s¼ ðx; y; z;ψ ;ϑ; qij; l;α1;α2;α3Þ. Coordinates x, y, z determine the posi-tion of the center of the debris (passive spacecraft) relativeto the orbital frame, angles ψ, ϑ describe orientation of thetether relative to the space debris, l denotes the tetherlength and coordinates, qij is a subset of the modal coordi-nates of the i flexible appendage. The orientation of thedebris is parameterized with Bryant angles α1, α2, α3 (x–y–zrotation sequence) [25] that define orientation of the debrisrelative to the orbital frame. This angle set has singularity atα2 ¼ π=2, but the motion of the debris near the angleα2 ¼ π=2 is unpredictable due to the possibility of theentanglement of the tether, therefore it is supposed thatα2oπ=2 (Fig. 2). Lagrange equations have the followingform:
ddt
∂K∂_sk
� ∂K∂sk
¼Qk ð1Þ
where K is a kinetic energy of the system, Qk is a generalizedforce corresponding to the generalized coordinate sk. Thekinetic energy of the considered system consists of twoterms: the kinetic energy of the rigid bodies and the kineticenergy of the flexible appendages. Before presenting theexpression for the kinetic energy let us consider the kine-matics of the system.
2.2. System's kinematic
The velocities of the space tug v1 and the space debrisv2 in Ox0y0z0 frame are
v2 ¼ ½ _x _y _z�T ; v1 ¼dr1dt
where
r1 ¼ r2þMαðρAþnT lÞ ¼ r2þMαðρT þlÞwhere ρA is a vector of the tether attachment point A.Mα isa rotation matrix that transforms coordinates from thedebris frame C2x2y2z2 to the orbital frame Ox0y0z0
Mα ¼cα2cα3 cα1sα3 þcα3sα2sα1 sα3 sα1 �cα3cα1sα2
�cα2 sα3 cα3cα1 �sα2sα3sα1 cα1 sα2 sα3 þcα3sα1
sα2 �cα2sα1 cα2cα1
264
375
where cαi ¼ cos αi, sαi ¼ sin αi (i¼1, 2, 3); l is a vector ofthe AC1 line in C2x2y2z2
l¼cos ϑ cos ψcos ϑ sin ψ� sin ϑ
264
375l
The angular velocity of the space debris is expressed as[25]
ω2x ¼ _α1 cos α2 cos α3þ _α1 sin α3
ω2y ¼ � _α1 cos α2 sin α3þ _α2 cos α3
ω2z ¼ _α1 sin α2þ _α3
8><>:
2.3. Kinetic energy of the system
The kinetic energy of the rigid bodies (debris and tug)is
2Kb ¼m1jv1j2þm1jv2j2þωT2J2ω2; ð2Þ
To describe the motion of flexible appendages thenormal-mode expansion technique is used. The deforma-tion of the flexible appendage i as a function of ξi (Fig. 2) isdefined as
ηi ¼ ∑1
j ¼ 1f jðξiÞqijðtÞ ð3Þ
where f jðξiÞ is a j mode shape function for j naturalfrequency, qij(t) is a generalized coordinate correspondingto j mode. Mode shape functions for the fixed-free beamhave the following form [26]:
f j ξi� �¼ Cj cosh
kjξili
� coskjξili
�aj sinhkjξili
�sinhkjξili
� �� �

Fig. 2. Space debris with flexible appendages.
V.S. Aslanov, V.V. Yudintsev / Acta Astronautica 104 (2014) 91–9894
where
aj ¼cos kjþcosh kjsin kjþsinh kj
and
k2j ¼ωj
ffiffiffiffiffiffiffiffiμil
4i
EiJi
s
where kj is the square of the nondimensional naturalfrequency, ωj is a dimensional natural frequency. Cj is anunessential constant multiplier that is taken so that f jðliÞ ¼ 1,where li is a length of the i flexible appendage.
For the fixed-free beam kj is defined by the followingequation [26]
cosh ki cos ki ¼ �1
First three nondimensional frequencies are
k22 ¼ 3:51; k22 ¼ 22:03; k23 ¼ 61:70
Now we can write the expression for the kinetic energy ofthe flexible appendage. The velocity of the mass elementdm of the flexible appendage i in frame Ox0y0z0 is
vηi ¼ v2þω2 � ρiþτ iξiþni ∑1
j ¼ 1f ijðξiÞqijðtÞ
!
þni ∑1
j ¼ 1f ijðξiÞ _qijðtÞ ð4Þ
The kinetic energy of the flexible appendage is
2Kfi ¼Z li
0jvξij2dm
and the total kinetic energy of the system is
2K ¼ 2Kbþ ∑nf
i ¼ 12Kfi ð5Þ
where nf is the number of flexible appendages.
2.4. Generalized forces
The tether tension force acting on the space debris isexpressed as
T¼ ½ctðl� l0Þþdt_l�nT ; l4 l00; lr l0
(ð6Þ
where ct is a tether stiffness, l0 is a tether free length, anddt is a tether damping. The thruster force vector of thespace tug in the frame Ox0y0z0 is F¼ ðFx; Fy; FzÞT .
The right hand side of Eq. (1) is written as
Qi ¼∂rA∂si
� T�∂r1∂si
� Tþ∂r1∂si
� F� ∑nf
j ¼ 1
∂Π fj
∂sið7Þ
where rA ¼ r2þMαρA. The potential energy of flexibleappendage j is [26]
Π fj ¼12
Z li
0EjJj
∂2ηj∂ξ2j
dξj ð8Þ
In this paper we suppose that the thrust force actingon the tug provides torque much greater magnitudecompared to the gravitational torque. Therefore, we donot include the gravitational potential energy terms fromthe interaction between the Earth and the tethered system.
For ρA ¼ ðxA yA zAÞT and F¼ ðF;0;0ÞT the generalizedforces for the generalized coordinates x2, y2, z2, α1, α2,α3, ψ, ϑ, l are
Qx2 ¼ F; Qy2 ¼ 0; Qz2 ¼ 0; Qij ¼ 0; Qα1 ¼ 0Qα2 ¼ Fð sin α2ðyA sin α3�xA cos α3ÞþzA cos α2
� lð sin α2 cos θ cos ðα3þψ ÞÞþ cos α2 sin θÞÞQα3 ¼ �F cos α2ðl cos θ sin ðα3þψ Þþxt sin α3þyA cos α3Þ
Qψ ¼ Fl cos α2 cos ϑ sin ðα3þψ ÞQϑ ¼ Flð cos α2 sin ϑ cos ðα3þψ Þþ sin α2 cos ϑÞ;Ql ¼ Fð cos α2 cos ϑ cos ðα3þψ Þ� sin α2 sin ϑÞ:

Table 1Parameters of the space tug and the passive spacecraft.
Parameter Value Parameter Value
Space tug mass, kg 500 Debris mass, kg 3000Tug thruster force, N 20 Debris moments of inertia, kg m2 J2x ¼ 2000
J2y ¼ 8000J2z ¼ 8000
Tether stiffness (Kevlar with sectional area 7.8 mm2), N/m 15,586 Tether length, m 50Solar panel length, m 5 Bending stiffness of the solar panel, EJ, N m2 1840Tether attachment point, rT ½1;0;0:3� Mass per unit length of the solar panel – μ, kg/m 10
Fig. 4. The vibrations of the solar panels, the tension force of the tether and the angle φ for the Case 1.
5 10 15 20 25 30t, s
0.015
0.010
0.005
0.000
q , q
q11
q12
10 11 12 13 14 150.0004
0.0002
0.0000
0.0002
0.0004
t, sq 12
Fig. 3. Two tones of the oscillations of flexible appendage.
V.S. Aslanov, V.V. Yudintsev / Acta Astronautica 104 (2014) 91–98 95

V.S. Aslanov, V.V. Yudintsev / Acta Astronautica 104 (2014) 91–9896
3. Analysis and numerical examples
The aim of this work is to study the motion of a spacedebris during the initial phase of the orbital transporta-tion. We show the interference between the tether vibra-tions and the vibrations of flexible appendages that canlead to mission failure. We suppose that the passive spacecraft(space debris) has two flexible appendages and the space-craft is already connected to the space tug. Let us considerseveral numerical examples of the relative motion of thepassive spacecraft and the space tug.
The amplitude of the oscillation decreases with theincrease in the oscillation frequency then for the sake ofsimplicity only one shape function for each flexibleappendage (panel) is taken, i.e. deformation of the panelhas the following form (3):
ξi ¼ f 1ðηiÞqi1ðtÞ
Fig. 5. The vibrations of the solar panels, the tension fo
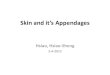
The following three cases are considered. In Case 1the natural frequency of the tether differs from thenatural frequency of the solar panels of the passivespacecraft. In Case 2 the natural frequency of the tetheris close to the natural frequency of the solar panels of thepassive spacecraft and the tether attachment point islocated close to the flexible appendages. In this case wesimulate a situation of structural failure of the solarpanel. Case 3 differs from Case 2 in that the attachmentpoint of the tether is located far from flexible appendagesthan in Case 2.
3.1. Parameters of the system and initial conditions
The parameters of the passive spacecraft and thespace tug are presented in Table 1. The tether is assumedto be made of the Kevlar like material. Sectional area of
rce of the tether and the angle φ for the Case 2.

V.S. Aslanov, V.V. Yudintsev / Acta Astronautica 104 (2014) 91–98 97
the tether is 7.8 MM2, the length is 50 m and the tetherdamping is dt¼0.
At t¼0 passive spacecraft rotates around its x-axis with11/s and the tether starts to pull the spacecraft at a sharpangle φ relative to the x-axis of the spacecraft. All casesstart with the following initial conditions:
xð0Þ ¼ yð0Þ ¼ zð0Þ ¼ 0; x: ð0Þ ¼ y
: ð0Þ ¼ z: ð0Þ ¼ 0;
a1ð0Þ ¼ a2ð0Þ ¼ a3ð0Þ ¼ψ0ð0Þ ¼ϑð0Þ ¼ 0;
a: 1ð0Þ ¼ 0:05; a: 2ð0Þ ¼ a: 3ð0Þ ¼ψ: ð0Þ ¼ ϑð0Þ ¼ 0; l
:ð0Þ ¼ 0:
3.2. Case 1: motion of the debris with fore-mounted flexibleappendages
To give some justification for using only one tone todescribe the deformation of flexible appendages we con-sider the vibration of flexible appendages taking two tones
Fig. 6. The vibrations of the solar panels, the tension fo
from the expression (3). Fig. 3 shows a plot of the variablesq11, q12 as a function of time. From this figure it can be seenthat amplitude of the first mode (dashed line) is an orderof magnitude more than the second mode amplitude. Withthis result we consider first tone of the oscillations.
At first we consider a case when the natural frequencyof the tether differs from the natural frequency of the solarpanels of the space debris. The natural frequency of thetether is higher than the frequency of the flexible appen-dages (EJ ¼ 1840 N m2, ct¼15,586 N/m).
Fig. 4 shows the vibrations of the flexible appendagesq1, q2 of the passive spacecraft, the tension force of thetether T and the angle φ.
Note that in this case the vibrations of the flexibleappendages does not have a significant influenceon the tether vibrations and on the attitude motion ofthe debris.
rce of the tether and the angle φ for the Case 3.

V.S. Aslanov, V.V. Yudintsev / Acta Astronautica 104 (2014) 91–9898
3.3. Case 2: motion of the space debris with fore-mountedflexible appendages
In this case the natural frequency of the tether is closeto the natural frequency of the solar panels of the passivespacecraft (EJ ¼ 1840 N m2, ct¼1558 N/m).
Fig. 5 shows the vibrations of the flexible appendages ofthe passive spacecraft, the tension force of the tether andthe angle φ for Case 2.
In this case we assume that the each solar panel has abreaking strain jqbj, denoted in Fig. 5 by horizontaldashed lines.
At t ¼ t1 � 15 s the deformation of the panel 2 q2reaches the breaking strain causing structural failure. Wesuppose that at t1 space debris loses its solar panel andcontinues motion with only one panel. The motion of theunbalanced debris can lead to the breakdown of the nextsolar panel. At t2 � 60 s panel 1 breaks of too.
Fig. 5 also demonstrates the mutual influence of thepanel's oscillation and the oscillation of the tether. Unlikethe Case 1, the amplitude of the tether vibrations is influ-enced by the vibrations of the solar panels and vice versa.
3.4. Case 3: motion of the space debris with aft-mountedflexible appendages
In this case just as in Case 2 the natural frequency of thetether is close to the natural frequency of the solar panelsof the debris, but the tether attachment point is locatedfarther from the flexible appendages than in Case 2. InFig. 6 we see that the structural failure occurred earlierthan in Case 2.
4. Conclusion
The mathematical model of the system consisting ofthe space tug, the tether and the large space debris withflexible appendages is developed. Several numerical exam-ples show that the space debris with flexible appendagescan affect the safety of the transportation process. Toreduce the risk of the structural failure the large amplitudevibrations of the flexible appendages should be avoided.The properties of the tether should be chosen taking intoaccount the properties of the flexible appendages – thenatural frequency of the tether should not induce largevibrations of the flexible appendages. Proposed mathema-tical model can be used to analyze active debris removal ofthe large passive spacecraft with flexible appendages.
Future research should be directed toward investigat-ing the influence of the variations in the parameter of thesystem on the safety of the transportation process includ-ing the analysis of the influence of uncertainties in theparameters of the space debris with flexible appendages. Itallows us to obtain the parameter space of the tug–tethersystem for the safe active debris removal mission.
Acknowledgments
This work was supported by Ministry of education andscience of Russia (Contract no. 9.540.2014/K).
References
[1] C. Bonnal, J.-M. Ruault, M.-C. Desjean, Active debris removal: recentprogress and current trends, Acta Astronaut. 85 (2013) 51–60, http://dx.doi.org/10.1016/j.actaastro.2012.11.009.
[2] C. Pardini, L. Anselmo, Evolution of the debris cloud generated bythe Fengyun-1c fragmentation event, in: Proceedings of the 20thInternational Symposium on Space Flight Dynamics, CD-ROM, NASACP-2007-214158, Goddard Space Flight Center, Greenbelt, MD, USA,2007.
[3] N.L. Johnson, Orbital debris: the growing threat to space operations,in: 33rd Annual AAS Guidance and Control Conference, Brecken-ridge, CO, 2010.
[4] C. Pardini, L. Anselmo, Physical properties and long-term evolutionof the debris clouds produced by two catastrophic collisions in earthorbit, in: 38th COSPAR Scientific Assembly, vol. 38, 2010, p. 3925.
[5] D.J. Kessler, B.G. Cour-Palais, Collision frequency of artificial satellites: thecreation of a debris belt, J. Geophys. Res.: Space Phys. 83 (A6) (1978)2637–2646, http://dx.doi.org/10.1029/JA083iA06p02637.
[6] J.C. Liou, N.L. Johnson, N.M. Hill, Controlling the growth of future LEOdebris populations with active debris removal, Acta Astronaut. 66(2010) 648–653, http://dx.doi.org/10.1016/j.actaastro.2009.08.005.
[7] C. Bonnal, J.-M. Ruault, M.-C. Desjean, Active debris removal: recentprogress and current trends, Acta Astronaut. 85 (0) (2013) 51–60,http://dx.doi.org/10.1016/j.actaastro.2012.11.009.
[8] R.L. Forward, R.P. Hoyt, C.W. Uphoff, Terminator tether: a spacecraftdeorbit device, J. Spacecr. Rocket. 37 (2) (2000) 187–196.
[9] L. Iess, C. Bruno, C. Ulivieri, U. Ponzi, M. Parisse, G. Laneve,G. Vannaroni, M. Dobrowolny, F. De Venuto, B. Bertotti, Satellitede-orbiting by means of electrodynamic tethers. Part i: generalconcepts and requirements, Acta Astronaut. 50 (7) (2002)399–406.
[10] L. Iess, C. Bruno, C. Ulivieri, G. Vannaroni, Satellite de-orbiting bymeans of electrodynamic tethers part II: system configuration andperformance, Acta Astronaut. 50 (7) (2002) 407–416.
[11] L. Johnson, The tether solution [space propulsion, electrodynamictether], IEEE Spectr. 37 (7) (2000) 38–43.
[12] S. Kawamoto, Y. Ohkawa, S. Kitamura, S.-I. Nishida, Strategy foractive debris removal using electrodynamic tether, in: Transactionsof Space Technology Japan, vol. 7.
[13] C. Cougnet, D. Alary, B. Gerber, J. Utzmann, A. Wagner, The debritor :and “off the shelf” based multi-mission vehicle for large space debrisremoval, in: Proceedings of the IAC-12-A.6.7.7, Naples, October 2012,2012.
[14] D. Alary, A. Pisseloup, Active debris removal way forward, in:Proceedings of the 64th International Congress, 2013.
[15] S. Kitamura, Y. Hayakawa, S. Kawamoto, A reorbiter for large GEOdebris objects using ion beam irradiation, Acta Astronaut. 94 (2)(2014) 725–735, http://dx.doi.org/10.1016/j.actaastro.2013.07.037.
[16] L. Jasper, H. Schaub, C. Seubert, V. Trushlyakov, E. Yutkin, Tetheredtug for large low earth orbit debris removal, in: AAS/AIAA Astro-dynamics Specialists Conference, Charleston, 2012.
[17] L. Jasper, H. Schaub, Input shaped large thrust maneuver with atethered debris object, Acta Astronaut. 96 (2014) 128–137, http://dx.doi.org/10.1016/j.actaastro.2013.11.005.
[18] L. Jasper, H. Schaub, Discretized input shaping for a large thrusttethered debris object, in: AAS/AIAA Space Flight Mechanics Meet-ing, AAS, Santa Fe, NM, 2014, pp. 1–20.
[19] H. Schaub, J. Junkins, Analytical Mechanics of Space Systems, 2nded., AIAA, Reston, VA, 2009.
[20] F.J. Regan, Re-entry vehicle dynamics, American Institute of Aero-nautics and Astronautics, Inc., New York, 1984, 413 p.
[21] V. Aslanov, The motion of a rotating body in a resisting medium,Mech. Solids 40 (2) (2005) 21–32.
[22] R. Benvenuto, S. Salvi, M. Lavagna, Dynamics analysis and gnc designof flexible systems for space debris active removal, in: Conferenceon Dynamics and Control of Space Systems (DYCOSS), Rome, Italy,2014.
[23] V. Aslanov, V. Yudintsev, Dynamics of large space debris removalusing tethered space tug, Acta Astronaut. 91 (2013) 149–156, http://dx.doi.org/10.1016/j.actaastro.2013.05.020.
[24] V.S. Aslanov, V.V. Yudintsev, Dynamics of large debris connected tospace tug by a tether, J. Guid. Control. Dyn. 36 (6) (2013) 1654–1660,http://dx.doi.org/10.2514/1.60976.
[25] J. Wittenburg, Dynamics of Systems of Rigid Bodies, Teubner,Stuttgart, 1977.
[26] S.G. Kelly, Fundamentals of Mechanical Vibrations, McGraw-Hill,New York, NY, 2000.