Embed Size (px)
Citation preview

Алгебро-геометрические методы в теорииинтегрируемых систем
Конспект, версия 0.01

Содержание
1 Обыкновенные дифференциальные уравнения, интегрируемость, признаки ин-тегрируемости, знакомство с плоскими алгебраическими кривыми 4
2 Эллиптические функции I, аналитический взгляд 8
3 Эллиптические функции II, геометрический взгляд. Проективное вложение торас помощью θ-функций, структура группы на эллиптической кривой, абелевымногообразия, якобианы 10
4 Эллиптические функции III, нелинейные уравнения в частных производных 10
5 L− A пара, алгебра дифференциальных операторов 13
6 Римановы поверхности = алгебраические кривые. Определение, локальные ко-ординаты, точки ветвления, гиперэллиптические римановы поверхности, крат-ность точки ветвления 15
7 Римановы поверхности как двумерные вещественные многообразия, компак-тификация римановой поверхности, род римановой поверхности, монодромия,формула Римана-Гурвица, топологическое строение неособой эллиптической кри-вой 19
8 Мероморфные функции на римановой поверхности, голоморфные отображенияримановых поверхностей, биголоморфный изоморфизм римановых поверхно-стей, особые алгебраические кривые 24
9 Дифференциалы на римановой поверхности, голоморфные дифференциалы, пе-риоды замкнутых дифференциалов, циклы на римановой поверхности, индекспересечения, канонический базис циклов, соотношение между периодами за-мкнутых дифференциалов 27
10 Билинейные соотношения Римана для периодов голоморфных дифференциалови их важнейшие следствия, эллиптические функции IV 27
11 Классическая теория возмущений, КАМ-теорема 28
12 Обыкновенные дифференциальные уравнения и алгебраическая геометрия, сигма-процесс = раздутие, классическая теория возмущений, бифуркации, аттракторы 28
13 Список литературы 29
2

Аннотация
Мы попытаемся объяснить, что такое интегрируемые системы, что такое спектральная кривая,и как она возникает в задаче интегрирования системы дифференциальных уравнений, рассмот-рим интегрируемую систему Хитчина, нелинейные уравнения и их солитонные решения, разберемчто такое представление Лакса для вполне интегрируемых систем. Акцент будет сделан на ал-гебраическую геометрию, кривые, якобианы, теоремы Римана-Роха и Биркгофа-Гротендика. Мытакже слегка коснемся когомологий пучков и топологии. Никаких предварительных знаний поалгебраической геометрии не требуется, все необходимое будет объяснено по ходу изложения.
Обозначения
R — множество (группа, поле) вещественных чиселC — множество (группа, поле) комплексных чиселZ — множество (группаб кольцо) целых чиселΓ — риманова поверхность=алгебраическая кривая в CP2
t — время, производная по времени обозначается точкой u = dudt
ch(x) = ex+e−x
2
3

Сюжет 1. Введение, обыкновенные дифференциальные уравнения, инте-грируемость, признаки интегрируемости, знакомство с плоскими алгеб-раическими кривыми
Рассмотрим твердое тело с одной закрепленной точкой, на которое не действует никаких внешнихсил (смотри рисунок).
x
y
z
L
Тогда момент инерции тела в неподвижной системе отсчета сохраняется, то есть ~L = 0, гдеточка означает производную по времени. Между тем наиболее простая связь между компонента-ми вращательного момента ~L твердого тела и компонентами угловой скорости ~Ω имеет место вподвижной системе координат с осями, направленными по главным осям инерции. Чтобы восполь-зоваться этой связью необходимо преобразовать уравнения движения к подвижным координатам.В результате получаем ([1], §36, уравнения (36.5))
I1Ω1 = (I2 − I3)Ω2Ω3
I2Ω2 = (I3 − I1)Ω1Ω3
I3Ω3 = (I1 − I2)Ω1Ω2.
При I1 = I2 получаем уравнения симметрического волчка Эйлера. Упростим эту систему, сделавмасштабное преобразование Ωi = αiui, подставляя получаем
I1α1u1 = (I2 − I3)α2α3u2u3
I2α2u2 = (I3 − I1)α1α3u1u3
I3α3u3 = (I1 − I2)α1α2u1u2.
Потребуем, чтобы
I1α1 = (I2 − I3)α2α3
I2α2 = (I3 − I1)α1α3
I3α3 = (I1 − I2)α1α2.
Это система алгебраических уравнений на αi, которая имеет решение, перемножая любые двауравнения и сокращая, получаем, например:
I1I2 = (I2 − I3)(I3 − I1)α23,
откуда находим α3 и т.д. В результате наша система примет вид
u1 = u2u3
u2 = u1u3
u3 = u1u2
4

Что значит решить или проинтегрировать эту систему обыкновенных дифференциальных урав-нений? Мы утверждаем, что это означает следующее:
1. Существует «достаточное» число первых интегралов, то есть величин не меняющихся поддействием фазового потока.
2. Использование алгебраической геометрии. Алгебраическая геометрия — это раздел мате-матики, занимающийся изучением алгебраических многообразий. Алгебраическое многообра-зие — это многообразие в Cn, заданное системой полиномиальных уравнений fi(z1, . . . , zn) = 0.
3. Возможность получить решения в квадратурах. Это вовсе не означает, что можно выразитьконечное решение в терминах элементарных функций, а только то, что мы получили «явную»формулу для решения в каком-то виде.
Разберем как все это работает в случае системы выше. Естественно начать решать систему споиска первых интегралов. Заметим, что
ddt
(u21 − u2
2) = 2u1u1 − 2u2u2 = 2u1(u2u3)− 2u2(u1u3) = 0ddt
(u21 − u2
3) = 2u1u1 − 2u3u3 = 2u1(u2u3)− 2u3(u1u2) = 0
то есть
u21 − u2
2 = Au2
1 − u23 = B
где A и B сохраняющиеся величины (пункт 1). В действительности, этого набора первых интегра-лов хватает, чтобы проинтегрировать систему. Имеем u2
1 = u22u
23 = (u2
1 − A)(u21 −B). И мы получа-
ем обыкновенное дифференциальное уравнение для u1, которое может быть проинтегрировано, тоесть мы можем выразить решение в квадратурах (пункт 3). Решение естественно записываетсячерез так называемую P-функцию Вейерштрасса. Оказывается,что естесственная область опреде-ления функции Вейерштрасса — это тор (смотри рисунок ниже).
T 2 = S1 × S1
Вот на этом этапе и возникает алгебраическая геометрия (пункт 2), так как тор — это такназываема риманова поверхность или, что то же самое, как мы увидим ниже, алгебраическаякривая, то есть алгебраическое многообразие комплексной размерности 1. Продемонстрируем какполучается эта кривая. Делая подстановку в уравнение z = u1, w = u1 получаем полиномиальноеуравнение w2 = (z2−A)(z2−B), а это уравнение кривой в C2 (алгебраической кривой, так как оназадается полиномом). Сделаем маленькое пояснение. Под Cn мы понимаем векторное пространстворазмерности n над полем комплексных чисел C, причем C2 — это комплексная плоскость, которуюне стоит путать с «обычной» вещественной плоскостью, где мы изображаем комплексные числа,которая также чаще всего называется комплексной плоскостью. Итак дадим следующее
Определение 1. (Плоская) алгебраическая кривая — это подмножество в C2, задаваемое од-ним полиномиальным уравнением.
5

Если (z, w) координаты в C2, то уравнение кривой имеет вид f(z, w) = 0, где f — полиномот z и w. Степень полинома называется степенью кривой. Кривая называется рациональной,если она имеет параметризацию с помощью рациональных функций, то есть существуют такиерациональные функции φ(τ) и ψ(τ) (τ ∈ C), что после подстановки их в уравнение кривой, полу-чаем тождество f(φ(τ), ψ(τ)) ≡ 0 для всех τ ∈ C, кроме конечного числа точек (тех, в которыхобращаются в нуль знаменатели функции φ и ψ.) Приведем несколько примеров рациональныхкривых.
Пример 1. Окружность z2 + w2 = 1, в данном случае z = φ(τ) = 1−τ2(1+τ2)2
и w = ψ(τ) = 2τ(1+τ2)2
.Пример 2. Декартов лист — нодальная кубика w2 = z2 + z3, здесь z(τ) = τ 2−1, w(τ) = τ 3− τ .
Чтобы получить эту параметризацию можно воспользоваться следующим способом: параметр τ— это коэффициент прямой w = τz, которая проходит через данную точку (z, w) декартова листа(смотри рисунок):
z
ww=tz
O
w2 = z3 + z2
z
ww=tz
O
w2 = z3
Пример 3. Полукубическая парабола (каспидальная кубика) w2 = z3. Здесь z = φ(τ) = τ 2 иw = ψ(τ) = τ 3, параметризация геометрически получается аналогично (смотри рисунок выше).
Задача 1. Получить рациональную параметризацию кривой z3 = w3 − w4.Определение 2. Эллиптическая кривая в C2 — это кривая, задаваемая уравнением w2 =
P3(z) = az3 + bz2 + cz+ d. Кривая называется невырожденной, если у полинома P3(z) нет кратныхкорней. Заметим, что сдвигом переменной z −→ z − b
3aмы можем приравнять b к нулю.
Утверждение 1. Невырожденная эллиптическая кривая не является рациональной.Доказательство. Пусть f(τ) и g(τ) такие рациональные функции, что
f 2 = g(g − 1)(g − λ) (∗).
Так как любой многочлен от одной переменной однозначно разлагается на множители, представимf и g в виде
f = rs, r, s ∈ C[t] и взаимно просты
g = pq, p, q ∈ C[t] и взаимно просты.
приводя к общему знаменателю (∗), получим
r2q3 = s2p(p− q)(p− λq).
Так как r и s взаимно просты, то сомножитель s2, стоящий в правой части делит q3, аналогичнотак как p и q взаимно просты, то сомножитель q3, стоящий в левой части делит s2, значит s2 = aq3,где a число. Тогда многочлен aq = ( s
q)2 является квадратом и
r2 = ap(p− q)(p− λq),
6

откуда видно, что bp, c(p− q), d(p−λq) тоже квадраты для некоторых чисел b, c, d. Тем самым мынашли 4 точки [µi : νi] ∈ CP1 на проективной прямой, что µip+ νiq квадраты. Покажем, что тогдаp и q, а следовательно и r c s константы. Заметим, что утверждение не изменится, если заменить pи q на p′ = αp+βq и q′ = γp+ δq, где α, β, γ, δ ∈ C и αγ−βδ 6= 0, поэтому будем считать, что нашиквадраты — это p, q, p− q, p− λq. Тогда p = u2 и q = v2, где u и v взаимно простые многочлены и
maxdeg u, deg v < maxdeg p, deg q.
Предположим от противного, что maxdeg p, deg q > 0 и является минимальным на множествевсех пар p, q, удовлетворяющих нашим условиям. Тогда
p− q = u2 − v2 = (u− v)(u+ v)p− λq = u2 − λv2 = (u− ρv)(u+ ρv),
где ρ =√λ, а так как u и v взаимно просты, то квадратами также будут u− v, u+ v, u− ρv, u+ ρv,
а у них максимальная степень меньше, чем у p и q, притиворечие. Этот метод называется методомбесконечного спуска Ферма. .
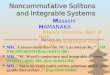
Приведем вид вещественной части эллиптической кривой в зависимости от полинома P3(z).
w2 = z(z − 1)(z − λ) w2 = (z + 1)(z2 + ε)
w2 = (z + 1)z2 = z3 + z2 w2 = (z + 1)(z2 − ε)
w2 = z3 w2 = z2(z − 1)
Здесь ε > 0. Как видно, число овалов и компонент связности вещественной части эллиптическойкривой может меняться.
7

Сюжет 2. Эллиптические функции I, аналитический взгляд
Рассмотрим ряд
P(z, τ) = 1z2
+ Σ(m,n)6=(0,0) 1(z−m−nτ)2
− 1(m+nτ)2
.
где z ∈ C, τ ∈ C, Imτ > 0. Определим решетку Λ = ω = mω1 + nω2, m, n ∈ Z, ω1
ω2/∈ R ⊂ C, —
смотри рисунок
Lw
w
1
2
тогда выражение выше запишется, как
P(z,Λ) = 1z2
+ Σ′Λ 1
(z−ω)2− 1
ω2,
где штрих означает, что в сумме не участвует ω = 0. Докажем сначала, что ряд определяетмероморфную функцию. На любом компакте, не содержащем точек решетки, этот ряд сходитсяравномерно и абсолютно. Действительно,
1(z−ω)2
− 1ω2 = 2zω−z2
ω2(z−ω)2= 2z−z2ω−1
ω3(zω−1−1)2.
Если число |ω| достаточно велико, то 2z−z2ω−1
(zω−1−1)2≈ 2z, поэтому для всех ω ∈ Λ, с достаточно большим
|ω| найдется константа C, такая что
| 1(z−ω)2
− 1ω2 | < C
|ω3| .
Так как мы рассматриваем ряд на компакте, то ∃ε > 0, такое что для всех z из нашего компактаи всех ω ∈ Λ имеем |z − ω| > ε, а значит найдется такая константа C, что неравенство
| 1(z−ω)2
− 1ω2 | < C
|ω3| .
верно сразу для всех ω ∈ Λ. Легко проверить, что ряд Σ′ 1|ω|3 сходится. Таким образом, P(z) ∼=
P(z, τ) — мероморфная функция, с полюсами в узлах решетки. Она называется функцией Вейер-штрасса.
Перечислим некоторые свойства функции Вейерштрасса.
1. Методом пристального взгляда замечаем, что P(z+ω1) = P(z+ω2) = P(z), то есть функциядвоякопериодическая.
2. P(z) = P(−z), то есть функция четная.
3. P ′(z) = −2Σ 1(z−ω)3
, P ′(z) также двоякопериодическая.
4. P ′(z) = −P ′(−z), то есть производная нечетная.
8

5. Функция P(z) имеет в узлах решетки двукратные полюсы, других особых точек у неё нет.
6. В окрестности нуля P(z) = 1z2
+az2 +bz4 + . . ., где a = g220, b = g3
28и g2 = 60Σ
′Λ
1ω4 и g3 = 140Σ
′Λ
1ω6
Выведем некоторые уравнения, которым удовлетворяет P(z). Имеем
P ′(z) = − 2z3
+ 2az + 4b3 + . . .,
и значит
P ′2(z) = 4z6− 8a
z2− 16b+регулярная часть,
но
4P3(z) = 4z6
+ 12az2
+ 12b+ регулярная часть,
так что
P ′2(z)− 4P3(z) + 20aP(z) = −28b+ регулярная часть.
Таким образом, выражение P ′2(z) − 4P3(z) + 20aP(z) есть двоякопериодическая целая функ-ция, то есть константа (расписать подробнее про периодичность и теорему Лиуввиля). Значитсправедливо равенство
P ′2(z) = 4P3(z) + g2(τ)P(z) + g3(τ).
Дифференцируя его дважды, получаем
P ′′(z) = 6P2(z) + g2(τ)P ′′′(z) = 12P(z)P ′(z).
Таким образом P(z) служит стационарным решением нелинейного волнового уравнения — урав-нения Кортевега-де Фриза (КдФ).
ut = uxxx − 12uux, где u = u(x, t).
Историческое замечание. Стимулом к изучению уравнения КдФ послужила работа Ферми,Улама и Паста (ФУП) 1955 года. С физической точки зрения в этой работе расматривался вопросо распределении энергии в цепочке нелинейных осцилляторов. Было высказано предположение,что при бесконечном увеличении числа осцилляторов («статистический предел») энергия будемравномерно распределяться между всеми модами, что означает «эргодичность». Рассматриваемаямодель представляла собой одномерную нелинейную цепочку, образованную равными массамиближайшие соседи которой связаны силой вида F (δ) = k(δ + αδ2). Такая модель приводит кследующей системе связанных нелинейных обыкновенных дифференциальных уравнений.
mxi = k(xi+1 + xi−1 − 2xi) + kα((xi+1 − xi)2 − (xi − xi−1)2)
где xi = xi(t), i = 1, 2, 3, . . . , N−1 и x0 = xN = 0. В качестве начальных условий как правило выби-рались значания xi(0) = sin iπ
Nи xi(0) = 0. При N = 64 эты система уравнений была проинтегриро-
вана численно на Лос-аламосской вычислительной машине MANIAC. Это было одним из первыхприменений компьютера для «мирных» научных расчетов. Полученные результаты показали, чтоэнергия в основном периодически циркулирует между первоначально заселенными модами, а еёраспределение по другим модам незначительно, в то время это было довольно неожиданно.
Теперь, когда мы знаем, что отображение z −→ (P(z),P ′(z)) параметризует эллиптическуюкривую, мы можем написать решение уравнения u2
1 = (u21 − A)(u2
1 −B) в виде u1(t) = P(t).
9

Сюжет 3. Эллиптические функции II, геометрический взгляд. Проектив-ное вложение тора с помощью θ-функций, структура группы на эллипти-ческой кривой, абелевы многообразия, якобианы
Опишем тор, для этого рассмотрим параллелаграмм в комплексной плоскости
a ab
b
и склеим противоположные стороны, как на рисунке ниже
получим тор
ab
который наследует комплексную структуру от плоскости, в которой взят параллелаграмм. Заме-тим, что тор можно получить и как фактор-группу C/Λ, где Λ ⊂ C — решетка. Тем самым мывидим, что тор обладает структурой абелевой группы, точки Pz на нем можно складывать так же,как на комплексной плоскости, только по модулю Λ
Pz1+z2 ≡ Pz1 + Pz2(mod Λ).
Алгебраическое многообразие, обладающее структурой группы называется абелевым. В такойгруппе взятие обратного элемента и копмозиции элементов — морфизмы.
Факт 1. Алгебраическая группа всегда коммутативна.Опишем групповую структуру на торе в терминах P-функции, θ-функции, а также геометри-
чески (в вещественной части).
Сюжет 4. Эллиптические функции III, нелинейные уравнения в частныхпроизводных
Попробуем найти решение уравнения (КдФ) в виде бегущей волны u = U(x−vt). Тогда уравнениеut = uxxx − 6uux примет вид
10

−vU ′ = 6UU′+ U
′′′ ,
штрих означает производную по аргументу функции U . После интегрирования
−vU = 3U2 + U′′
+ a.
Умножим на U ′ и снова проинтегрируем
−vU2
2= U3 + 1
2U ′2 + aU + b,
или
U ′2 = −2U3 − vU2 − aU − b.
что является уравнением (возможно вырожденной) эллиптической кривой. Это значит, что с точ-ностью до некоторых мелочей U есть функция Вейерштрасса этой кривой
u(x, t) = −P(x− vt)
Вырождение эллиптической кривой постредством стягивания одного из циклов в точку дает ра-циональную кривую с двойной точкой (смотри рисунки ниже).
Эта операция приводит к «солитонному» решению
u(x, t) = v2ch−2(
√v
2(x− vt)),
которое получается из кривой y2 = −2x3 − vx2. В данном случае a = b = 0, действительно, имеемуравнение
dt = dU√−2U3−vU2 ,
которое выражено в квадратурах. Можно и непосредственно подставить функцию в уравнение ипроверить, что тогда оно выполняется тождественно. График решения имеет вид и напоминаетуединенную волну:
x-vt
u(x-vt)
11

Немного истории. История солитона началась более 150 лет назад со знаменитых теперьнаблюдений, сделанных шотландским инженером Джоном Скоттом Расселом во время поездкиверхом вдоль берега канала Юнион в окрестности Эдинбурга. В его докладе было сказано следу-ющее:
«Я наблюдал за движением баржи, которую быстро тянула по узкому каналу пара лошадей,когда баржа неожиданно остановилась. Но масса воды, которую баржа привела в движение, неостановилась, а собралась у носа судна в состоянии сильного волнения, затем неожиданно оста-вила его позади, катясь вперед с огромной скоростью и принимая форму большого одиночноговозвышения, то есть округлого, гладкого и четко выраженного водяного холма, который продол-жал свой путь вдоль канала, не меняя своей формы и не снижая скорости. Я последовал за ним,он по-прежнему катился вперед со скоростью приблизительно восемь или девять миль в час, со-хранив свой первоначальный профиль возвышения длиной около тридцати футов и высотой отодного до полутора футов. Его высота постепенно уменьшалась, и после одной или двух мильпогония потерял его в изгибах канала. Так в августе 1834 года мне впервые довелось столкнутьсяс необычайным и красивым явлением, которое я назвал уединенной волной трансляции . . . »
Рассел провел много наблюдений за уединенными волнами и пришел к заключению, что ихформа действительно устойчива, а скорость распространения в канале неизменной глубины выра-жается соотношением
c =√g(h+ η),
где η — амплитуда волны, h — глубина канала в отсутствии волны и g — гравитационная посто-янная.
Результаты Рассела противоречили взглядам того времени, согласно которым такая волна немогла быть устойчивой. Королевский астроном сэр Джон Гершель охарактеризовал её как «простоотсеченную половину обычной волны». В споре принял участие также Эйри, построивший теориюволн на мелкой воде, согласно которой такие волны неустойчивы. Противоречие было разрешенов 1895 году Кортевегом и де Фризом, которые вывели уравнение, описывающее слабо нелинейныеволны на мелкой воде,
∂η∂t
= 32
√gh(η ∂η
∂x+ 2
3h∂η∂x
+ 13σ ∂
3η∂x3
).
В этом уравнении σ = h3
3− Th
gρ, где T — поверхностное натяжение жидкости плотности ρ. Было
найдено, что это уравнение имеет решения в виде уединенной волны устойчивой формы. Послеэтой работы Кортевега и де Фриза проблема была исчерпана, и к этому уравнению обратилисьвновь лишь вначале 1960-х годов в связи с некоторыми задачами физики плазмы. Отметим, чтоизменение масштабов и переход к новой функции
t′= 1
2
√ghσt, x′ = −x√
σ, u = −1
2η − h
3
приводит уравнение к виду (штрихи опущены):
ut − 6uux + uxxx = 0.
Опишем ещё один тип решения для уравнения КдФ, так называемое автомодельное реше-ние.
Ещё несколько нелинейных уравнений:
1. В 1970 году Кадомцев и Петвиашвили вывели уравнение колебания плазмы — уравнениеКадомцева-Петвиашвили (КП)
12

34uyy = (ut − 1
4uxxx − 3
2uux)x,
оно также имеет солитонные решения.
2. нелинейное уравнение Шредингера (НШ).
ut = − i2(uxx + 2|u|2ux)
В результате численного решения этих и подобных им уравнений было обнаружено, что коли-чество солитонов сохраняется и что при взаимодействии солитоны не интерферируют, а проходятодин сквозь другой, не меняя формы. Поскольку уравнения (КдФ) и (КП) нелинейны, для нихне очевидно выполнение «основной теоремы дифференциальных уравнений» — теоремы о суще-ствовании решения и его однозначной определенности краевыми условиями. Оказалось, что этутеорему удобнее доказывать сразу для целой иерархии солитонных уравнений, чем для каждогоиз них в отдельности. О том что такое иерархия расскажем позже.
Сюжет 5. L− A пара, алгебра дифференциальных операторов
Для системы уравнений из сюжета 1(стр. 4) нам повезло отыскать два первых интеграла, сейчасмы укажем систематический способ отыскания первых интегралов для систем, записанных в некойспециальной форме.
Определение 1. L − A-пара или пара Лакса (лаксова пара) — это пара матриц или диффе-ренциальных операторов, удовлетворяющая уравнению
A = [A,L].
где A и L матрицы или дифференциальные операторы, точка означает производную по времени.Пример 1. Гармонический осциллятор описывается обыкновенным дифференциальным
уравнением q + ω2q = 0. Его можно записать в гамильтоновой форме
q = pp = −ω2q.
Возьмем две матрицы
L =
(p ωqωq −p
), M =
(0 −ω
2ω2
0
),
тогда система эквивалентна уравнению L = [L,M ], при этом гамильтониан имеет вид H = 12(p2 +
ωq2) = 14trL2. Это представление для гармонического осциллятора, в котором нет спектрального
параметра. Если взять матрицы
L =
(p ωq − λ
ωq − λ −p
), M =
(0 −ω
2ω2
0
),
то получим представление со спектральным параметром λ, и спектральная кривая имеем вид
P (λ, µ) = det(
p− µ ωq − λωq − λ −p− µ
)= −(p− µ)2 − (ωq − λ)2 = 0
Пример 2. Рассмотрим систему уравнений
13

x1 = x1(b2 − b1), b1 = x1 − x3
x2 = x2(b3 − b2), b2 = x2 − x1
x3 = x3(b1 − b3), b3 = x3 − x2
Оказывается что эта система имеем представление Лакcа со спектральным параметром λ
ddt
b1 1 x3λx1 b2 1λ−1 x2 b3
= [
b1 1 x3λx1 b2 1λ−1 x2 b3
,
0 0 x3λx1 0 00 x2 0
]
Уравнение спектральной кривой
det(µId− Aλ) = det
b1 − µ 1 x3λx1 b2 − µ 1λ−1 x2 b3 − µ
= 0.
В результате получаем
P (µ, λ) = µ3λ− µ2λ(b1 + b2 + b3)− µλ(b1b2 + b1b3 + b2b3 + x1 + x2 + x3)−− λ(b1b2b3 − x3b2 − x2b1 − x1b3)− λ2x1x2x3 − 1 = 0
и мы нашли 4 интеграла движения. Действительно, например,
ddt
(b1 + b2 + b3) = (x1 − x3) + (x2 − x1) + (x3 − x2) = 0,x1x1
= b2 − b1 =⇒ ˙lnx1 = b2 − b1 =⇒ lnx1 =∫
(b2 − b1)dtx2x2
= b3 − b2 =⇒ ˙lnx2 = b3 − b2 =⇒ lnx2 =∫
(b3 − b2)dtx3x3
= b1 − b3 =⇒ ˙lnx3 = b1 − b3 =⇒ lnx3 =∫
(b1 − b3)dt,
cкладывая три последних равенства получаем x1x2x3 = const. На этом примере замечаем, чтосуществует не одна спектральная кривая, а целое семейство спектральных кривых, каждая криваяопределяется значением первых интегралов.
Задача 1. Представить систему
u1 = u2u3
u2 = u1u3
u3 = u1u2
в лаксовой форме со спектральным параметром λ, если известно, что
Aλ =
(−2u3λ (u1 + u2) + λ2(u1 − u2)
u2 − u1 − λ2(u1 + u2) 2u3λ
)то есть найти матрицу Bλ, такую что d
dtAλ = [Aλ, Bλ]. Заметим, что матрица Bλ определена не
однозначно.Пример 3. Уравнение КдФ в лаксовой форме. Рассмотрим кольцо A = C∞(R) бесконечно
дифференцируемых функций на прямой и обозначим буквой D оператор дифференцирования ddx,
действующий на алгебре A. Для функции f ∈ A обозначим через f оператор умножения на f в A.Тогда правило Лейбница
ddx
(fφ) = dfdxφ+ f dφ
dx
можно истолковать как равенство операторов
14

Df = f ′ + fD.
Пусть L = D2u, = 4D3 + 6uD + u′, тогда [P,L] = 6uu′ + u′′′. Для доказательства обе частиоператорного равенства нужно применить к пробной функции φ ∈ C∞(R)
PLφ = 4φ(5) + 4u(3)φ+ 12u(2)φ(1) + 15u(1)φ(2) + 10uφ(3) + 9uu(1)φ+ 6u2φ(1),LPφ = 4φ(5) + 3u(3)φ+ 12u(2)φ(1) + 15u(1)φ(2) + 10uφ(3) + 3uu(1)φ+ 6u2φ(1),
откуда
(PL− LP )φ = (u(3) + 6uu(1))φ
Если теперь считать, что u = u(x, t), a ∂∂tD = 0, то уравнение КдФ можно записать в виде
∂L∂t
= [P,L].
Пример 4. Уравнение КП в лаксовой форме.Заметим, что если мы представили систему обыкновенных дифференциальных уравнений в
лаксовой форме, то у нас автоматически появляется множество законов сохранения:
ddttr(Ap) = ptr([A,B]Ap−1) = ptr(ABAp−1 −BAp) = ptr(Bap −BAp) = 0,
где мы воспользовались тем, что функция tr(·) не меняется при циклических перестановках мат-риц. Итак, для каждого p ≥ 1 у нас есть сохраняющаяся величина. Составим теперь характери-стическое уравнение для матрицы Aλ, имеем
det(µId− Aλ) = 0.
Заметим, что мы получили кривую в комплексной плоскости C2 с координатами (µ, λ) — алгебра-ическую кривую, так как характеристическое уравнение — полиномиальное, коэффициенты этойкривой выражаются через следы степеней матрицы Aλ, поэтому наша кривая сохраняется фазо-вым потоком и является инвариантом. Она называется спектральной кривой. Коэффициентыпри мономах µmλn — первые интегралы. В действительности, мы получили не одну спектральнуюкривую, а целое семейство спектральных кривых — по одной кривой для каждого набора значенийпервых интегралов.
Представление Лакса является замечательной иллюстрацией признаков интегрируемости изсюжета 1: в этом представлении есть множество законов сохранения, алгебраическая геометриявозникает очень естественно через спектральную кривую и мы можем попытаться выписать ре-шение в квадратурах.
Заглушка.
Сюжет 6. Римановы поверхности = алгебраические кривые. Определе-ние, локальные координаты, точки ветвления, гиперэллиптические ри-мановы поверхности, кратность точки ветвления
Для геометрического представления многозначных функций комплексного переменного w = w(z)неудобно считать z точкой комплексной плоскости. Например, пусть w =
√z. На вещественной
оси (при z > 0) можно выделить две ветви этой функции w = +√z и w = −
√z. На комплексной
плоскости это уже невозможно: если z = r exp (iφ), то два значения корня из z, имеющие вид
15

w1 =√reiφ/2 и w1 = −
√reiφ/2 =
√rei(φ+π)/2
переходят друг в друга при обходе по циклу, охватывающему точку z = 0. Можно получить одно-значную ветвь корня как функции от z, суживая область определения этой функции — например,проводя разрез от нуля до бесконечности. Другой способ, который для данного курса будет ос-новным, мы сейчас объясним на простейшем примере той же функции
√z. Рассмотрим в C2 с
комплексными координатами (z, w) график этой двузначной функции, т.е. точки вида (z,+√z),
z,−√z. Две ветви этого графика пересекаются в точке (0, 0) — точке ветвления этой алгеб-
раической функции. Заметим, что этот график может быть задан в C2 одним (комплексным)уравнением:
F (z, w) = w2 − z = 0.
Функция w =√z является однозначной функцией от точки графика: она имеет вид проекции
(z, w) −→ w. Отправляясь от этого примера, дадим общееОпределение 1. Пусть F (z, w) = Σi=n
i=0Pi(z)wi — многочлен от переменных z, w. Он определяет(n-значную) алгебраическую функцию w = w(z). Риманова поверхность Γ этой функциизадается в C2 уравнением F (z, w) = 0.
Как и в разобранном выше примере, многозначная функция w = w(z) превращается в одно-значную функцию w = w(P ) от точки римановой поверхности Γ: если = (z, w) ∈ Γ, то w(P ) = w(проекция графика на w-ось).
Замечание 1. Данное определение римановой поверхности является упрощенным и расхо-дится с общепринятым. Такое расхождение может возникнуть, если на поверхности F (z, w) = 0имеются особые точки. Мы вернемся к этому вопросу позднее.
Замечание 2. Ниже мы увидим, что функция w = w(P ) является не только однозначной, нои аналитической (голоморфной) функцией на римановой поверхности Γ. С «комплексной» точкизрения риманова поверхность есть (комплексная) алгебраическая кривая. С «вещественной» жеточки зрения это — двумерная поверхность в C2 = R4, заданная двумя уравнениями ReF = 0,ImF = 0. В теории функций комплексного переменного встречаются и более сложные (неалгебра-ические) римановы поверхности, где F (z, w) не есть многочлен. Например, уравнение ew − z = 0задает риманову поверхность логарифма. У нас таких римановых поверхностей встречаться небудет.
Обсудим теперь важное свойство неособости точек римановой поверхности.Определение 2. Точка P0 = (z0, w0) ∈ Γ римановой поверхности Γ = (z, w)|F (z, w) = 0
называется неособой, если в ней отличен от нуля комплексный вектор градиента:
gradCF |P0 = (∂F (z0,w0)∂z
, ∂F (z0,w0)∂w
) 6= 0
Риманова поверхность Γ неособая, если все ее точки неособые.Лемма (комплексная теорема о неявной функции). Пусть точка P0 = (z0, w0) такова,
что:
1. F (z0, w0) = 0
2. ∂F (z0,w0)∂w
6= 0,
где F (z, w) — многочлен. Тогда существует единственная функция w = w(z) такая, что F (z, w(z)) ≡0 и w(z0) = w0. Эта функщя будет аналитической функцией от z в некоторой окрестности точкиz.
Доказательство. Заглушка.
16

Пусть P0 = (z0, w0) — неособая точка поверхности Γ. Пусть, например, в этой точке отличнаот нуля производная ∂F
∂w. Тогда согласно лемме в окрестности точки P0 поверхность Γ допускает
параметрическое представление вида
(z, w(z)) ∈ Γ, w(z0) = w0
причем функция w(z) голоморфна. Поэтому z называется в этом случае комплексной локальнойкоординатой или локальным параметром на Γ в окрестности точки P0 = (z0, w0) ∈ Γ. Аналогично,если в точке P0 = (z0, w0) отлична от нуля производная ∂F
∂z, то в качестве локального параметра
можно взять w (очевидный вариант леммы), и поверхность Γ в окрестности изучаемой точки P0
может быть представлена в виде
(z(w), w) ∈ Γ, z(w0) = z0
где функция z(w0), конечно же, голоморфная.Для неособой римановой поверхности на пересечении областей первого и второго типа, т.е. в тех
точках поверхности Γ, где одновременно и ∂F∂w6= 0, и ∂F
∂z6= 0, можно пользоваться обоими способа-
ми представления римановой поверхности. Возникающие при этом «функции перехода» w = w(z)и, обратно, z = z(w) голоморфны. В дальнейшем мы будем рассматривать в основном неособыеримановы поверхности (как уже отмечалось выше, в этом случае наше определение римановойповерхности совпадает с общепринятым). Предыдущие рассуждения показывают, что такие рима-новы поверхности являются комплексными многообразиями (комплексной размерности 1). Выборв качестве локального параметра переменных z или w не всегда является самым удобным. У насвстретятся и другие способы выбирать локальный параметр τ так, чтобы точки (z, w) римановойповерхности Γ локально представляются в виде
(z = z(τ), w = w(τ))
где z(τ), w(τ) — голоморфные функции от τ , причем
( ∂z∂τ, ∂w∂τ
) 6= 0
Замечание 3. Легко показать, что условия неособости обеспечивают неприводимость алгеб-раической кривой F (z, w) = 0, т. е. невозможность разложить ее уравнение на нетривиальныемножители F = F1F2, где F1, F2 — многочлены положительной степени (проверьте!).
Риманова поверхность Γ, заданная в C2 уравнением
F (z, w) = wn + a1(z)wn−1 + . . .+ an(z) = 0
(где a1(z), . . . , an(z) — многочлены), расположена над z-плоскостью n-листно. Точный смысл этогоутверждения таков. Пусть π : Γ −→ C — проекция римановой поверхности на z-плоскость, зада-ваемая формулой
π(z, w) = z
Тогда для почти всех z полный прообраз π−1(z) состоит из n различных точек поверхности Γ
(z, w1(z)), . . . , (z, wn(z))
где w1(z), . . . , wn(z) — n корней уравнения при данном z. При некоторых значениях z некото-рые из точек прообраза могут сливаться, образуются точки ветвления. Эти точки ветвления наповерхности Γ могут быть найдены из условия обращения в нуль производной ∂F
∂w, т. е. из системы
17

F (z, w) = 0∂F∂w
= 0
(в окрестности точек, где ∂F∂w6= 0, проекция π является локальным изоморфизмом — смотри вы-
ше). Проекции точек ветвления на π-плоскость ищутся, поэтому, как нули дискриминанта R(z)многочлена F (z, w):
R(z) =∏
i 6=j(wi(z)− wj(z)) = НОД(F, ∂F∂w
)
В неособом случае на поверхности Γ имеется, таким образом, лишь конечное число точек ветвле-ния.
Пример 1. Гиперэллиптические римановы поверхности имеют вид
w2 = Pn(z)
где Pn(z) — многочлен степени n. Эти поверхности двулистно расположены над z-плоскостью.Здесь F (z, w) = w2 − Pn(z). Вектор градиента имеет вид gradCF = (−Pn′(z), 2w). Точка (z0, w0)особая, если в ней
w0 = 0, Pn′(z0) = 0
Вместе с условием w2 = Pn(z) принадлежности точки (z0, w0) поверхности Γ получаем:
P (z0) = 0Pn′(z0) = 0
то есть z0 — кратный корень многочлена Pn(z). Итак, условие неособости поверхности есть условиеотсутствия кратных корней у полинома Pn(z):
Pn(z) =∏i=n
i=1 (z − zi), zi 6= zj при i 6= j.
Найдем точки ветвления поверхности. Для их определения имеем систему
w2 = Pn(z)w = 0
откуда получаем n точек ветвления Pi = (z = zi, w = 0), i = 1, . . . , n. В окрестности любойточки поверхности Γ, отличной от точки ветвления, в качестве локального параметра естественновзять z, и w =
√Pn(z) — голоморфная функция. В окрестности точки ветвления Pi в качестве
локального параметра удобно взять
τ =√z − zi
Тогда для точек римановой поверхности получим локальное параметрическое представление
zi = z + τ 2, w = τ√∏
j 6=i τ2 + zi − zj
где радикал есть однозначная голоморфная функция для достаточно малых τ (подкоренное вы-ражение не обращается в нуль), причем dw
dτ6= 0 при τ = 0. Изучим, как устроено отображение π в
окрестности точки ветвления P0 = (z0, w0) поверхности Γ. Пусть τ — локальный параметр на Γ вокрестности P0. Будем считать, что z(τ = 0) = z0, w(τ = 0) = w0. Тогда
z = z0 + aτ p +O(τ p+1), w = w0 + bτ q +O(τ q+1),
18

где a и b — отличные от нуля коэффициенты. Поскольку в качестве локального параметра вокрестности точки P0 можно взять w, то q = 1. Получим вид поверхности Γ в окрестности точкиветвления:
z = z0 + aτ p +O(τ p+1), w = w0 + bτ +O(τ 2),
причем р > 1. Таким образом, точки вида
P1(z) = (z, w0 + ε1c p√z + . . .), . . . , Pp(z) = (z, w0 + εpc p
√z + . . .),
где ε1, . . . , εp — первообразные корни p-й степени из единицы, c = ba−1p , лежат в полном прообра-
зе π−1(z) в любой достаточно малой окрестности точки P0, сливаясь в одну в самой этой точке(многоточие обозначает члены вида o( p
√z).
Определение 3. Число f = p − 1 называется кратностью точки ветвления, или индексомветвления этой точки.
Например, для гиперэллиптической поверхности w2 = Pn(z) все нули z = z1, . . . , z = zn много-члена Pn(z) дают на поверхности точки ветвления кратности 1.
Задача 2. Доказать, что суммарная кратность всех точек ветвления, висящих на поверхностиΓ над z = z0, равна кратности z = z0 как корня дискриминанта R(z).
Задача 3. Рассмотрим совокупность n-листных римановых поверхностей вида
F (z, w) = Σi+j≤naijziwj = 0
при всевозможных значениях коэффициентов aij (так называемые плоские кривые степени n).Доказать, что для общей поверхности такого вида имеется n(n − 1) точек ветвления, и все ониимеют кратность 1. Другими словами, условия появления точек ветвления кратности, большейединицы, записываются в виде набора алгебраических соотношений на коэффициенты aij.
Опишем топологическое строение рациональных и эллиптических кривых. Заглушка.
Сюжет 7. Римановы поверхности как двумерные вещественные многооб-разия, компактификация римановой поверхности, род римановой поверх-ности, монодромия, формула Римана-Гурвица, топологическое строениенеособой эллиптической кривой
Уже отмечалось, что произвольная риманова поверхность с вещественной точки зрения являет-ся двумерной поверхностью (двумерным многообразием). Что можно сказать о топологии этойповерхности? Легко видеть, что эта поверхность связна (проверьте!). Покажем, что она ориенти-рована. Если z = x+iy — локальный параметр в некоторой области U на Γ, то x, y — вещественныекоординаты в U . Другой локальный параметр w = u + iv связан с первым голоморфной заменойw = w(z), dw
dz6= 0, определяющей тем самым гладкую замену вещественных координат u = u(x, y),
v = v(x, y). Якобиан этой замены имеет вид
det
(∂u∂x
∂u∂y
∂v∂x
∂v∂x
)= |dw
dz|2 > 0,
что и означает ориентированность. Пока сделанные наблюдения о связности и ориентированно-сти римановых поверхностей не позволяют классифицировать их по топологическому типу в силунекомпактности. Мы сейчас укажем процедуру компактификации римановой поверхности Γ, то
19

есть добавления к ней нескольких точек, превращающих ее в компактное комплексное многообра-зие и, поэтому, в замкнутую ориентированную поверхность. Напомним сначала, как компактифи-цировать комплексную z-плоскость C.
Для этого нужно добавить к C одну «бесконечно удаленную» точку ∞. В качестве локальногопараметра в окрестности ∞ нужно взять ζ = 1
z. В общей части действия локальных параметров z
и ζ, где z 6= 0, ζ 6= 0, возникают голоморфные функции перехода
z(ζ) = 1ζ, ζ(z) = 1
z.
Получаем поверхность C с топологией сферы («сферу Римана»). Топологическая эквивалентностьсо стандартной сферой дается стереографической проекцией, где один из полюсов сферы переходитв точку ∞. Другое описание C — это комплексная проективная прямая
CP1 = (z1 : z2)| |z1|2 + |z2|2 6= 0, (z1 : z2) ∼ (λz1 : λz2), λ ∈ C, λ 6= 0.
Эквивалентность CP1 −→ C устанавливается так
(z1 : z2) −→ z = z1z2
Аффинная часть CP1, то есть множество z2 6= 0 — переходит в C, бесконечно удаленная точка(1 : 0) в ∞.
Чтобы компактифицировать любую (алгебраическую!) риманову поверхность Γ = F (z, w) =0, мы вложим ее в CP2. Здесь CP2 — это (комплексная) проективная плоскость: совокупностьненулевых комплексных векторов [ξ : η : ζ], определенных с точностью до умножения на ненулевойкомплексный множитель
[ξ : η : ζ] ∼ [λξ : λη : λζ], λ 6= 0.
Это компактное комплексное многообразие. Аналогично определяются проективные пространствавысших размерностей. Область в CP2, заданная условием ζ 6= 0, называется аффинной частьюCP2. Отображения
[ξ : η : ζ] −→ (z = ξζ, w = η
ζ)
и обратное
(z, w) −→ (z : w : 1)
устанавливают изоморфизмы аффинной части CP2 и C. Вся проективная плоскость получается изаффинной части C2 добавлением бесконечно удаленной части вида [ξ : η : 0] ∼ CP1 ∼ S2. ВложениеΓ в CP2 определим так: пусть F ( ξ
ζ, ηζ) = Q(ξ,η,ζ)
ζN, где Q(ξ, η, ζ) — однородный многочлен от ξ, η, ζ
степени N (мы предполагаем, что дробь, стоящая в правой части, несократимая). Зададим в CP2
комплексную кривую Γ (двумерную поверхность) однородным уравнением
Q(ξ, η, ζ) = 0.
Конечная (аффинная) часть кривой Γ (где ζ 6= 0) совпадает с Γ. Подклеиваемые бесконечно уда-ленные точки имеют вид
Q(ξ, η, ζ) = 0, ζ = 0.
20

Поверхность Γ компактна и является поэтому искомой компактификацией поверхности Γ.Задача 1. Доказать, что кривая Q(ξ, η, ζ) = 0 неособа в CP2, если и только если выполняется
условие
ранг(
ξ η ζ∂Q∂ξ
∂Q∂ξ
∂Q∂ζ
)= 2
во всех точках этой кривой.Пример 1. Γ = w2 = z. Локальный параметр в точке ветвления (z = 0, w = 0) — это τ =
√z,
то есть z = τ 2, w = τ . Компактификация Γ имеет вид Γ = η2 = ξζ. Введем координаты u, v вокрестности несобственной прямой CP1 (с ξ 6= 0), полагая
u = ηξ
= wz, v = ζ
ξ= 1
z,
причем несобственная прямая имеет вид v = 0. В этих координатах кривая Γ записывается (локаль-но) в виде u2 = v. Ее единственная бесконечно удаленная точка — это (u = 0, v = 0). Локальнымпараметром в окрестности этой точки служит u = w
z=√v = 1√
z. Другими словами, в окрестности
бесконечно удаленной точки на Γ имеем
z = 1u2, w = 1
u, u −→ 0.
Пример 2. Γ = w2 = z2 − a2. Точки ветвления (z = ±a, w = 0), соответствующие локальныепараметры τ± =
√z ∓ a. Компактификация имеет вид Γ = η2 = ξ2 − a2ζ2. Делая замену как
в примере 1, получаем вид кривой Γ в окрестности несобственной прямой u2 = 1 − a2v2. Приv = 0 получаем u = ±1. Таким образом, на поверхности Γ есть две бесконечно удаленных точкиP± = [1 : ±1 : 0]. В качестве локального параметра в окрестности каждой из этих точек можновзять v = 1
z. Вид поверхности Γ в окрестности точек P+, P− таков
z = 1v, w = ± 1
w
√1− a2v2, v −→ 0.
где√
1− a2v2 — однозначная голоморфная при малых v функция, причем ветвь корня выбираетсятак, чтобы при v −→ 0 он обратился в единицу.
Пример 3. Γ = w2 = P2n+1(z). Этот пример аналогичен примеру 1. Здесь имеется однабесконечно удаленная точка: в качестве локального параметра в ее окрестности можно взять u.Поверхность Γ в окрестности бесконечно удаленной точки имеет вид
z = 1u2, w = 1
u2n+1
√∏2n+1i=1 (1− ziu)
(здесь многочлен P2n+1(z) имеет вид P2n+1(z) =∏2n+1
i=1 (z − zi), радикал является однозначнойголоморфной функцией от u при малых u, обращающейся в 1 при u = 0).
Пример 4. Γ = w2 = P2n+2(z). Этот пример аналогичен примеру 2. Здесь у Γ две бесконечноудаленных точки P±, в окрестности которых можно взять v = 1
zза локальный параметр. Вид
поверхности Γ в окрестности этих точек таков:
z = 1v, w = ± 1
vn+1
√∏2n+2i=1 (1− ziv)
(здесь P2n+2(z) =∏2n+2
i=1 (z − zi), радикалу придается смысл по аналогии со сказанным выше).В дальнейшем мы не будем ставить крышку на Γ, считая всегда, что риманова поверхность Γ
надлежащим образом компактифицирована.Хорошо известно, что связные компактные (то есть замкнутые) ориентированные двумерные
поверхности поддаются простой топологической классификации. Все они сферы с g ручками, g ≥ 0.Операция приклейки ручки изображена на рисунке ниже.
21

Заглушка.
Число ручек g называется родом такой поверхности. Вот простейший пример сфер с ручками:
S2 T 2
Род римановой поверхности является ее важнейшей характеристикой. Вычислим род поверхно-стей из примеров 1-4. Начнем с примера 2. Выкинем из z-плоскости C отрезок [−a, a] с концамив точках ветвления. Вне этого отрезка можно выделить две ветви w± = ±
√z2 − a2 двузначной
функции w(z) =√z2 − a2, не перепутывающиеся друг с другом. Другими словами, полный прооб-
раз π−1(C \ [−a, a]) на Γ распадается на два куска, на каждом из которых отображение π являетсяизоморфизмом. При переходе с одного берега разреза [−a, a] на другой ветви w+(z) и w−(z) пере-ставляются местами. Поэтому поверхность Γ склеивается из двух одинаковых экземпляров сферс разрезами по правилу, указанному на рисунке.
Загдушка.
После склейки снова получается сфера, то есть род g равен нулю. Пример 1 аналогичен примеру2, но разрез нужно проводить между точками 0 и ∞, то есть бесконечно удаленную точку нужносчитать точкой ветвления. Снова род равен нулю.
В примере 4 нужно произвольно разбить точки ветвления на пары и провести разрезы (ду-ги) в C, соединяющие парные точки ветвления (всего n + 1 разрез). Поверхность Γ склеится издвух идентичных экземпляров сферы с такими разрезами, где берега соответствующих разрезовсклеиваются «крест-накрест» (смотри рисунок для n = 1).
Нетрудно сообразить, что после склейки получится сфера с n ручками, получаем род g = n. Впримере 3 ситуация аналогична, но при проведении разрезов в качестве одной из точек ветвлениянужно брать ∞. Снова род g равен n.
Задача 2. Пусть все нули z1 < z2 < . . . < z2n+1 многочлена P2n+1(z) вещественны. Выберем вкачестве разрезов для поверхности Γ = w2 = P2n+1(z) отрезки вещественной оси
[z1, z2], [z3, z4], . . . , [z2n+1,∞].
Функция w(z) =√P2n+1(z) однозначная на каждом листе поверхности Γ, образовавшемся после
удаления циклов
π−1([z1, z2]), π−1([z3, z4]), . . . , π−1([z2n+1,∞]),
22

вещественна на берегах этих разрезов на каждом из листов. Показать, что на каждом листе знакирадикалов
√P2n+1(z) на верхнем берегу разреза чередуются, возможное распределение знаков
смотри на рисунке ниже.
Для более сложных римановых поверхностей их топологическое устройство определить нелег-ко. Для этого полезно использовать группу монодромии римановой поверхности, которую мысейчас определим. Выколем из C образы точек ветвления z1, . . . , zN . Выкинем из поверхностиΓ полные прообразы этих точек π−1(z1), . . . , π−1(zN). Получим поверхность Γ0, которая являетсяn-листным накрытием проколотой сферы C \ (z1 ∪ . . . ∪ zN). Группой монодромии римановой по-верхности называется группа монодромии этого накрытия. Напомним общее определение группымонодромии накрытия применительно к данному случаю. Фиксируем точку ∗ ∈ C(z1 ∪ . . . ∪ zN),занумеруем произвольно точки P1, . . . , PN из слоя π−1(∗) (все эти точки различны). Любой за-мкнутый контур в C \ (z1 ∪ . . . ∪ zN) с началом и концом в точке ∗ после поднятия в Γ0 по-рождает перестановку точек слоя P1, . . . , PN . Получаем представление фундаментальной группыπ1(C \ (z1 ∪ . . . ∪ zN), ∗) (свободной группы с N − 1 образующими) в группу Sn перестановок nэлементов, которое и называется представлением монодромии. Образ этого представления в Snназывается группой монодромии.
Для гиперэллиптических римановых поверхностей группа монодромии совпадает с S2 = Z2.В общем случае действие образующих группы монодромии, отвечающих обходам вокруг точекветвления, определяется индексами ветвления.
Задача 3. Пусть z0 — образ точки ветвления, и полный прообраз π−1(z0) на Γ состоит източек ветвления P1, . . . , Pk кратностей f1, . . . , fk соответственно (если какая-то точка Pi не являетсяточкой ветвления, то мы полагаем fi = 0). Доказать, что циклу в C, однократно обходящему точкуz0, отвечает элемент из группы монодромии, распадающийся на циклы длины f1 + 1, . . . , fk + 1.
Это утверждение дает чисто топологическое определение кратностей (индексов) точек ветвле-ния.
Замечание 1. Монодромия, отвечающая обходам вокруг точки z =∞, однозначно определяет-ся по монодромии, отвечающей обходам вокруг образов конечных точек ветвления. Действительно,контур, обходящий только точку z =∞, распадается в произведение контуров, обходящих все ко-нечные точки ветвления, перемножая соответствующие элементы группы монодромии в конечныхточках, получаем монодромию в бесконечности. Так, для поверхности w2 = P2n+2(z) монодромияв бесконечности тривиальна (соответствующий контур в z-плоскости обходит четное число точекветвления), то есть в бесконечности у этой поверхности нет точек ветвления. А для поверхностиw2 = P2n+1(z) монодромия в бесконечности нетривиальна, поскольку здесь z = ∞ контур обхо-дит нечетное число точек ветвления. Тем самым мы еще раз убеждаемся в том, что бесконечноудаленная точка поверхности w2 = P2n+1(z) является точкой ветвления.
Задача 4. Доказать, что для общей поверхности из предыдущего сюжета группа монодромиисовпадает с полной симметрической группой Sn. Указание: показать, что точки ветвления такойповерхности можно так, занумеровать парами различных чисел i 6= j, i, j = 1, 2, . . . , n, что обходвокруг образов точек Pij и Pji порождает перестановку i-й и j-й точек слоя (при подходящейнумерации этих точек).
В заключение этого сюжета укажем формулу Римана-Гурвица, выражающую род римановойповерхности g через суммарную кратность f ее точек ветвления и число листов n. Эта формулатакова
g = f2− n+ 1.
23

Задача 5. Доказать формулу Римана-Гурвица. Указание: триангулируем сферу CP1 так, что-бы образы точек ветвления оказались вершинами триангуляции. Пусть V,R, T — числа вершин,ребер и треугольников триангуляции соответственно. При помощи отображения π поднимем этутриангуляцию на поверхность Γ. Пусть V , R, T — числа вершин, ребер и треугольников поднятойтриангуляции. Найти связь между числами со шляпками и без. Использовать теорему об эйлеровойхарактеристике V −R + T = 2 для сферы S2, V − R + R = 2− 2g для поверхности Γ рода g.
Заглушка.
Сюжет 8. Мероморфные функции на римановой поверхности, голоморф-ные отображения римановых поверхностей, биголоморфный изоморфизмримановых поверхностей, особые алгебраические кривые
Определение 1. Функция f = f(z, w) мероморфна на римановой поверхности Γ = F (z, w) = 0,если она является рациональной функцией от z, w, то есть имеет вид
f(z, w) = P (z,w)Q(z,w)
,
где P (z, w),Q(z, w) — многочлены, причемQ(z, w) не есть тождественный нуль на Γ. Мероморфныена поверхности Γ функции образуют поле, алгебраическая структура которого несет в себе, вдействительности, всю информацию о геометрии римановой поверхности.
Определение 1′. Функция f мероморфна на римановой поверхности Γ, если она голоморфнав окрестности любой точки поверхности Γ за исключением конечного числа точек Q1, . . . , Qm,то есть локально представляется в виде f = f(τ), τ — локальный параметр, df
dτ= 0. В точках
Q1, . . . , Qm функция f имеет полюсы кратностей q1, . . . , qm соответственно, то есть в окрестностилюбой точки Qi представляются в виде
f = τ−qii fi(τi)
где τi — локальный параметр в окрестности точки Qi, τi(Qi) = 0, fi(τi) — голоморфная при малыхτi функция и fi(τi) 6= 0.
Легко проверяется корректность определения 1′, то есть независимость от выбора локальногопараметра, а также корректность определения кратности полюса. Нетрудно проверить также, чтоиз условий определения 1 вытекают условия определения 1′. Оказывается, справедлива
Теорема. Определения 1 и 1′ эквивалентны.Мы не даем доказательство этой теоремы.Пример 1. Гиперэллиптическая риманова поверхность w2 = P2n+1(z). Здесь координаты z
и w являются однозначными функциями на поверхности Γ, голоморфными в конечной части Γ.В бесконечно удаленной точке поверхности Γ эти функции имеют полюсы: z — двойной полюс,a w полюс кратности 2n + 1. Это немедленно вытекает из формул предыдущего сюжета. ЕслиP2n+1(z) =
∏2n+1i=1 (z − zi), то функция 1
z−zi при каждом i имеет на Γ единственный полюс второгопорядка в i-й точке ветвления. Это вытекает из сюжета 7. Отметим также, что функция z имеетна Γ два простых нуля в точках z = 0, w = ±
√P2n+1(0), сливающихся в один двойной нуль, если
P2n+1(0) = 0. Функция w имеет на Γ 2n + 1 простой нуль в точках ветвления. Кратность нулямероморфной функции определяется по аналогии с кратностью полюса.
Пример 2. Гиперэллиптическая риманова поверхность w2 = P2n+2(z). Здесь снова функции zи w голоморфны в конечной части Γ. А на бесконечности у этих функций имеется два полюса (вбесконечно удаленной части поверхности Γ): у функции z два простых полюса, а у функции w —два полюса кратности n+ 1. Это вытекает из формул сюжета 7.
24

Задача 1. Доказать теорему для гиперэллиптических римановых поверхностей. Указание:пусть f = f(z, w) — мероморфная (в смысле определения 1′) функция на гиперэллиптическойримановой поверхности w2 = P (z). Показать, что функции f+ = f(z, w) + f(z,−w) и f− =w−1(f(z, w)− f(z,−w)) являются рациональными функциями от z.
Замечание 1. Нетрудно доказать, что непостоянных голоморфных функций на компактныхримановых поверхностях не бывает. Действительно, такая функция достигала бы на Γ своегомаксимума и, поэтому, по принципу максимума должна быть константой.
По аналогии с мероморфными функциями на римановых поверхностях определяются голо-морфные отображения римановых поверхностей. Если Γ = F (z, w) = 0, Γ = F (z, w) = 0, тоголоморфное отображение Γ −→ Γ определяется парой мероморфных функций z = f1(z, w), w =f2(z, w). По-другому, если τ — локальный параметр на Γ в окрестности точки P , а τ — локальныйпараметр на Γ в окрестности точки f(P ), то локально отображение f должно записываться в ви-де τ = φ(τ), где φ — голоморфная функция от τ . Из теоремы следует, что эти два определенияравносильны.
Пример 3. Пусть f — мероморфная функция на Γ. Она определяет отображение Γ в CP1, гдеполюсы переходят в бесконечно удаленную точку. Проверим голоморфность этого отображения.В окрестности регулярных точек это очевидно. Пусть z — локальная координата в конечной частиCP1, ζ = 1
z— локальная координата в окрестности ∞ ∈ CP1. Допустим, функция имеет полюс
k-го порядка в точке P0 ∈ Γ, f(P0) =∞ ∈ CP1, то есть записывается через локальный параметр τв виде
z = f(P ) = cτk
+O(τ−k+1), c 6= 0,
где τ(P0) = 0. Тогда ζ = 1f(P )
= c−1τ k + O(τ k+1), то есть отображение имеет в точке P0 нулькратности k.
При доказательстве простейших свойств мероморфных функций на римановых поверхностяхполезно использовать соображения, связанные с понятием степени отображения. Ключевым мо-ментом здесь является следующее обстоятельство (справедливое для голоморфных отображенийлюбых комплексных многообразий одинаковой размерности). Пусть f : Γ −→ Γ — голоморфноеотображение поверхности Γ в Γ, P ∈ Γ — регулярное значение этого отображения. Тогда степеньотображения f равна числу прообразов точки P . Действительно, если f(P ) = P , τ и τ — локаль-ные параметры в окрестности точек P и P соответственно, τ(P ) = τ(P ) = 0, то отображение fлокально запишется в виде голоморфной функции τ = φ(τ), причем dφ
dτ(0) 6= 0. Якобиан этого
отображения в точке P равен |dφdτ
(0)|2 > 0, что и доказывает справедливость сформулированногоутверждения.
Задача 2. Доказать, что для любой мероморфной функции на римановой поверхности Γ числонулей равно числу полюсов (нули и полюсы берутся с учетом их кратностей).
Для голоморфных отображений римановых поверхностей определены точки ветвления и ихкратности, а также число листов. Точки ветвления — это критические точки отображения F :Γ −→ Γ. В окрестности таких точек отображение F записывается через локальные параметры ввиде τ = φ(τ), где dφ
dτ(0) = 0. Кратность точки ветвления — это кратность нуля производной dφ
dτ
при τ = 0. Ясно, что при Γ = CP1 такое определение совпадает с определением сюжета 6. Далее,число листов — это степень отображения F .
Задача 3. Пусть g — род поверхности Γ, а g — род поверхности Γ, n — число листов отображе-ния, f — суммарная кратность точек ветвления отображения F . Доказать следующее обобщениеформулы Римана-Гурвица
g = f2
+ ng − n+ 1.
25

Определение 2. Отображение F : Γ −→ Γ называется биголоморфным изоморфизмом,если оно и его обратное F−1 голоморфны.
Из теоремы нетрудно вывести, что класс биголоморфных изоморфизмов римановых поверх-ностей совпадает с классом бирациональных изоморфизмов (само отображение и его обратноезадается рациональными функциями z = z(z, w), w = w(z, w) и z = z(z, w), w = w(z, w)). Вдальнейшем мы будем использовать эти два термина как равнозначные. Имеет место очевидное,но важное
Утверждение. Если поверхности Γ и Γ биголоморфно (бирационально) изоморфны, то ониимеют одинаковый род.
Доказательство. Биголоморфный изоморфизм является, очевидно, гомеоморфизмом. А отно-сительно гомеоморфизмов род инвариантен. Утверждение доказано.
Определение 3. Риманова поверхность Γ называется рациональной, если она биголоморфноизоморфна CP1.
Род рациональной поверхности равен нулю. Оказывается, что это условие является и достаточ-ным для рациональности.
Задача 4. Пусть Γ — риманова поверхность рода g ≥ 1. Доказать, что на поверхности Γ несуществует мероморфной функции с единственным простым полюсом.
Пример 4. Поверхность w2 = z. Эта поверхность рациональна. Бирациональный изоморфизмс CP1 задается проекцией (z, w) −→ w.
Задача 5. Показать, что поверхность w2 = P2(z), где P2(z) — квадратный многочлен, ра-циональна. Явный вид рациональной параметризации этой поверхности дается известными изинтегрального исчисления подстановками Эйлера.
Пример 5. Поверхность w2 = P2g+2(z) при g ≥ 1 нерациональна. Покажем, что каждая такаяповерхность бирационально изоморфна некоторой поверхности вида w2 = P2g+1(z). Пусть z0 —один из нулей многочлена P2g+2(z). Положим
z = 1z−z0 , w = w(z − z0)−(g+1).
Обратное отображение имеет вид
z = z0 + 1z, w = wz(g+1).
Если P2g+2(z) = (z − z0)∏2g+1
i=1 (z − zi), то P2g+1(z) =∏2g+1
i=1 (1 + (z0 − zi)z).Таким образом, оба «типа» гиперэллиптических римановых поверхностей, рассмотренные в сю-
жете 6, дают один и тот же класс поверхностей. В заключение этого сюжета вернемся к вопросу обособых комплексных алгебраических кривых Γ = F (z, w) = 0. Оказывается, всегда существуетнеособая риманова поверхность Γ (комплексное одномерное многообразие), такая что кривая Γзадается в виде z = z(P ), w = w(P ), где z(P ), w(P ) — мероморфные функции на Γ. ПоверхностьΓ можно выбрать минимальным (или универсальным) способом в следующем смысле слова. ЕслиΓ1 — другая такая поверхность, то ее отображение в кривую Γ пропускается через голоморфноеотображение Γ1 −→ Γ.
Пример 6. Посмотрим, что происходит при появлении кратного нуля у многочлена P2g+1(z) вуравнении гиперэллиптической кривой w2 = P2g+1(z). Пусть P2g+1(z) = (z − z0)2
∏2g−1i=1 (z − zi), где
числа z0, z1, . . . , z2g−1 попарно различны. Рассмотрим кривую Γ
w2 = (z − z0)2∏2g−1
i=1 (z − zi)
(можно представить себе, что эта кривая получена из неособой римановой поверхности w2 =∏2g+1i=1 (z − zi) вырождением z2g −→ z0, z2g+1 −→ z0) и риманову поверхность Γ
26

w2 =∏2g−1
i=1 (z − zi)
рода g − 1. Отображение Γ −→ Γ задается формулам z = z, w = w(z − z0). Нетрудно проверитьсвойство универсальности. Общую конструкцию построения десингуляризации Γ мы не приво-приводим. Укажем, что для особых кривых F (z, w) = 0 римановой поверхностью алгебраическойфункции w = w(z) называется поверхность Γ (всегда неособая!). Отметим, что совокупность раци-ональных функций от z, w на особой кривой Γ естественно отождествляется с некоторым подполемполя мероморфных функций на десингуляризации Γ.
Пример 7. «Кривые Энриквеса» с g особенностями типа двойных точек получаются из сферыРимана CP1 отождествлением g пар точек a1, b1, . . . , ag, bg. Таким образом, рациональные функ-ции на кривой Энриквеса — это рациональные функции f(z) на комплексной плоскости, z ∈ C,удовлетворяющие условиям
f(ai) = f(bi), i = 1, . . . , g.
Более сложные особеняости (типа «клюва») получаются, если фиксировать набор точек c1, . . . , ckи наложить на рациональные функции f(z) условия f ′(ci) = 0, i = 1, . . . , k. Возможны и болеесложные особенности.
Сюжет 9. Дифференциалы на римановой поверхности, голоморфные диф-ференциалы, периоды замкнутых дифференциалов, циклы на римановойповерхности, индекс пересечения, канонический базис циклов, соотноше-ние между периодами замкнутых дифференциалов
Пусть z = x+iy — локальный параметр в некоторой области римановой поверхности Γ. Дифферен-циальные 1-формы (называемые также дифференциалами) на римановой поверхности локальнозаписываются в виде ω = P (x, y)dx + Q(x, y)dy. Вводя базис dz = dx + idy, dz = dx − idy можнопереписать ω в виде ω = fdz + gdz.
Лемма 1. Справедливо равенство
dω = (∂g∂z− ∂f
∂z)dz ∧ dz
Доказательство очевидно.Следствие. Форма ω вида ω = fdz замкнута, если и только если функция f голоморфна.Формы вида ω = fdz называются формами типа (1, 0). Класс таких форм инвариантен отно-
сительно голоморфных замен локального параметра (проверьте!).Определение 1. Дифференциал ω голоморфный (или дифференциал первого рода), если он
локально записывается в виде ω = f(z)dz, где f(z) — голоморфная функция локального параметраz.
Заглушка.
Сюжет 10. Билинейные соотношения Римана для периодов голоморфныхдифференциалов и их важнейшие следствия, эллиптические функции IV
Заглушка.
27

Сюжет 11. Классическая теория возмущений, КАМ-теорема
Заглушка.
Сюжет 12. Обыкновенные дифференциальные уравнения и алгебраиче-ская геометрия, сигма-процесс = раздутие, классическая теория возму-щений, бифуркации, аттракторы
Заглушка.
28

Список литературы
[1] Ландау Л.Д., Лифшиц Е.М., «Механика», Москва, «Наука», 1988.
[2] Арнольд В.И., «Обыкновенные дифференциальные уравнения», R&C Dynamics, Москва,2000.
[3] Табор М., «Хаос и интегрируемость в нелинейной динамике», URSS, 2001.
[4] Hithin N., «Integrable systems», Clarendon Press, Oxford, 1999
[5] Дубровин Б.А., «Римановы поверхности и нелинейные уравнения», R&C Dynamics, Москва,2001.
[6] Оден М., «Вращающиеся волчки: курс интегрируемых систем», R&C Dynamics, Москва, 1999.
[7] Рид М., «Алгебраическая геометрия для всех», Москва, «Мир», 1991.
[8] Демидов Е.Е., «Иерархия Кадомцева—Петвиашвили и проблема Шоттки», «Фундаменталь-ная и прикладная математика», 1998, том 4, 1.
[9] Мамфорд Д., «Лекции о тета-функциях», Москва, «Мир», 1998.
[10] Прасолов В.В., Соловьев Ю.П., «Эллиптические функции и алгебраические уравнения»,Москва, «Факториал», 1997.
[11] Новокшенов В.Ю., «Ведение в теорию солитонов», R&C Dynamics, Москва, 2002.
Примечание. Книги из списка литературы и обновленную версию конспекта можно найтиздесь https://theor.jinr.ru/ belyov/.
29