Embed Size (px)
Citation preview

Brain Emotional Learning Based Intelligent Controller for Permanet Magnet Synchronous Motor
Fahimeh Tahvili Pour Fard, Department of Electrical
Engineering, Islamic Azad University, Najafabad Branch
Esfahan, Iran [email protected]
Gazanfar Shahgholian, Amin Rajabi Department of Electrical
Engineering, Islamic Azad University, Najafabad Branch
Esfahan, Iran [email protected]
Mohammad Reza Habibollahi Department of Computer
Engineering, Islamic Azad University, Najafabad Branch
Esfahan, Iran [email protected]
Abstract— Among ac drives, the permanent magnet synchronous motor has gained popularity owing to its high torque to current ratio, large power to weight ratio, high efficiency, high power factor and robustness .Because of its technical and economic advantages, Permanent Magnet Synchronous Motor drive techn-ology is a serious contender for replacing the existing technologie-s. In this paper we report the utilization of a modern controller (BELBIC) based on emotion processing mechanism in brain. Our results show superior control characteristics especially very fast response, simple implementation and robustness with respect to disturbances and manufacturing imperfections. Our proposed method enables the designer to shape the response in accordance with the multiple objectives of his/her choice. And it may be asserted, the system with more suitable regulation of parameters achieves higher performance too.
Keywords- Permanent magnet synchronous motor; brain emoti-onal learning based intelligent controlle; control design.
I. INTRODUCTION This gives the PMSM machine the highly desirable dynamic performance capabilities of the separately excited dc machine, while retaining the general advantages of the ac over dc motors. Originally, vector control was applied to the induction motor and a vast amount of research work has been devoted to this area. The vector control method is relevant to PMSM drive as the control is completely carried out through the stator as the rotor excitation control is not possible [1, 2]. However, precise speed control of a PMSM drive becomes a complex issue owing to nonlinear coupling among its winding currents and the rotor speed as well as the nonlinearity present in the torque equation. The system nonlinearity becomes severe if the PMSM drive operates in the field weakening region where the direct axis current, id≠0. This results in the appearance of a non-linear term which would have vanished under the existing vector control scheme with id≠0. There have been considerabl-e developments in nonlinear control theory applicable to electric motor drives [3]. Interestingly, the d-q transformation applicable to ac motors can be considered as a feedback linearization transformation. However, with the recent develo-
pments in nonlinear control theories, a modern control engineer has not only found a systematic approach in dealing with nonlinear connections but has managed to develop appro-aches, which had not been considered previously. The surges of such nonlinear control methods applicable to electromecha-nical systems include variable structure systems [4], different-ial geometric approach and passivity theory [5-16]. But most of these controllers are complex to implement and are costly, so it is important to design a controller that requires less cost with good performance. This paper focuses on solving these complex control problems via an innovative approach by the use of a companion emotional controller.
II. PMSM CONTROL Mathematical models are of fundamental importance in
understanding any physical system. A dynamic model of the PMSM is based on the electrical circuit and mechanical equa-tions of the PMSM, which each represented by a second order state space model. With assumptions that the PMSM is unsatu-rated and eddy currents and hystersis losses are negligible, a dynamic model for PMSM in the synchronous rotor reference frame by choosing the stator current components (id, iq), the rotor angular speed (ωm) and the mechanical rotor position (θm) as state variables is as follows as [17, 18]:
dd
mqd
qd
d
sd V
L1Pi
LL
iLR
idtd +ω+−= (1)
mq
mmd
q
dq
q
sq V
L1P
LPi
LL
iLR
idtd +ω
λ+ω−−= (2)
Lmqdqdqm
m TJ1
JBii)LL(
J2P3
iJ2
P3dtd −ω−−+
λ=ω (3)
mmdtd ω=θ (4)
where Rs is stator resistance, Ld and Lq are d- and q-axes stator inductance, id and iq are d- and q-axes stator current, Vd and Vq are d- and q-axes stator voltage, TE is electromagnetic torque,
978-1-4244-7398-4/10/$26.00 ©2010 IEEE IPEC 2010989

Model output
Emotional Cue
Amygdala
Emotional Cue
Sensory input
Thalamus
Sensory
Cortex Orbitofrintal
Cortex
P is number of pole pairs, λm is permanent magnetic flux linkage, θm is mechanical rotor position (rad), ωm is rotor angular speed (rad/s), B is damping coefficient, J is total inertia constant and TL is load torque. The d- and q-axes flux linkages are given by:
qqq iL=λ (5)
mddd iL λ+=λ (6)
The inverter frequency is:
rs P ω=ω (7)
Various researchers have reported that there exist variations in Xd, Xq and λm with the direct and quadratic axis saturation as well as with the direction of rotation [7-9]. In light of these findings we propose to use the brain emotional learning based intelligent controller (BELBIC), wherein this controller responds to all of these variations in the drive system. The obj-ective of this paper is to obtain the PMSM control voltages in order to achieve high performance speed and torque tracking.
According to the motor model given in (1-4), it can be seen that the speed control can be achieved by controlling the q-axis component vq of the supply voltage as long as the d-axis current id=0 is maintained at zero. This results in the electrom-agnetic torque being directly proportional to the current iq, since id=0 for the sake to validate the principle of the new BELBIC technique, the d-axis flux linkage depends only on the rotor permanent magnets.
III. BELBIC MODEL Motivated by the success in functional modeling of
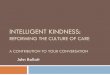
emotions in control engineering applications [8], the main purpose of this paper is to use a structural model based on the limbic system of mammalian brain and emotional communica-tion between two people, for decision making and control engineering applications. We have adopted a network model developed by Moren and Balkenius [12], as a computational model that mimics amygdala, orbit frontal cortex, thalamus, sensory input cortex and generally, those parts of the brain thought to be responsible for processing emotions. Here the intelligent system, the computational models termed BELBIC, is used as the controller blocks. For sake of simplicity, the BELBIC term is called emotional controller and companion emotional controller in this paper respectively. The model of the proposed BELBIC structure is illustrated in Fig.1.
Fig. 1. The abstract structure of the computational model mimicking
some parts of mammalian brain
The BELBIC technique is essentially action generation mechanisms based on sensory inputs and emotional cues. In general, these can be vector valued, although in the benchmarks discussed in this paper for the sake of illustration, one sensory input and one emotional signal (stress) have been considered. The emotional learning occurs mainly in amygda-la. The learning rule of amygdala is given in (10). Amygdala is a part of brain that to be responsible for processing emotions and correspond to orbitofrontal cortex, thalamus, sensory input cortex Fig.1. Amygdale and orbitofrontal cortex have the network structure in computational model that within each them there is one connection in lieu of each sensory input. Also, there is another connection for thalamus input within amygdala. Value of this input is equal to maximum sensory inputs value. Connections output are computed pursuant to:
iii VSA = (8)
iii WSO = (9)
where Ai and Oi are the values of amygdala output and output of orbitofrontal cortex at each time, V is the gain in amygdala connection and W is the gain in orbit frontal connection. Variations of V and W can be calculated as:
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−α=Δ ∑ )AR(S,0maxV
jjii (10)
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−−β=Δ ∑∑ ROASW
jj
jjii (11)
Just as be saw Ai values cannot decrease, it means that doesn't happen to forget information in amygdala. Whereas "forgettin-g" or idiomatically, inhibiting is duty of orbitofrontal cortex. Eventually, model output obtains from (12).
∑∑ −=j
ji
i OAE (12)
990

Yr u
Reference model
BELBIC Controller Plantr* e Y
Fig.2 shows the BELBIC controller configuration. The used functions in emotional cue R and sensory input S blocks are given by the following relations:
p321 yKyeKeKR +⋅+= (13)
dt.ekedtdkekS 321 ∫++= (14)
Where e, yp and y are system error, controller output and system output respectively. Also, k1 and K1 through k3 and K3 are gains, which must be tuned for designing a satisfactory controller. Eventually, initial values for α and β in O, Ath and A also functions R and S should be selected for emotional signal generation properly. Here the purposed intelligent system, the computational model termed BELBCIC, is used as the controller block. In the purposed system that is called companion emotional controller, pursuant to documentary thoughts of psychology, about encounter to problems and emotional cues, considerably presence of a reliable one will help to solution of the emotional and psychic problems, and therefore, it is modeled as a lateral emotional controller in the intelligent controller BELBCIC.
Fig. 2. Control system configuration using BELBIC
The structure of the lateral emotional controller is similar to prevalent BELBIC structure and only their inputs are different together. As input function of lateral emotional controller depend error, system output variations and also REWARD variation of the basic BEIBIC. Fig.3 shows a configuration of
the emotional network (BELBCIC).
Fig. 3. Control system configuration using BELBC
IV. CONTROLLER SYSTEM The control method for the PMSM is chosen based on the
parameters, which include the usage, performance and speed range. Fig.4 shows the block diagram of the new control system incorporating the companion emotional controller (BELBIC). The emotional controller receives the error signals between the command speed and torque and the actual motor speed and torque as part of inputs and generates the output signal. The controller output is vq according to the simplified model of (4)-(7) and the controller model of (8)-(13). From the controller output vq, the command quadratic axis current component Iqc can be calculated according to the motor model (4)-(7).
Fig. 4. Control system structure of new PMSM drive Using Iqc, and the pre-calculated Idc, the command a-b-c
phase currents are generated using inverse Park's transforms. In order to implement the vector control algorithm, the hysteresis current controller is used. The current controller compares the command currents with the corresponding actual motor currents and generates the logic signals to fire the inverter switches.
V. RESULTS AND DISCUSSION In test1 simulated responds are shown in Fig.5 and 6:
The load torque is changed from 0N-m to 5N-m at t= 0.3s and then to 10N_m at t=0.2s, Command speed is increased at t=0.15s. In Test 2 simulated responds are shown in Fig.7 and 8: But if suddenly, the load torque is
991

changed from 5N-m to 10N-m at transient state (t=0.12s), the simulated responses of this variation for BELBIC controller are shown in Fig.7. Computer simulations have been carried out to determine system responses for a prevalent vector control (PVC) in Fig 8. From comparison between BELBIC and PVC, it is seen that settles time in BELBIC controller is lesser than BELBIC controller where the load torque is changed from 5N_m to 10N_m.
Fig. 5. Speed control of PMSM using BELBIC (a) Stator current, (b)
speed, (c) torque
Fig. 6. Speed control of PMSM using PVC (a) Stator current, (b) speed, (c) torque
This shows the capability of the new companion emotio-
nal controller in comparison with BELBIC controller in terms of disturbance rejection.
Fig. 7. Simulation response for sudden changes at PMSM control with BELBIIC.(a)current(b)speed(c)torque
Fig. 8. Simulation response for sudden changes at PMSM control with PVC (a) Stator current, (b) speed, (c) torque
VI. CONCLUSION The performance of BELBIC as speed controller of an
PMSM has been demonstrated. Simulation implementation for a 4hp PMSM has been verified to demonstrate the effectivene-ss of this new emotional controller (BELBIC). The performan-ce of emotional controller has been compared with those of the conventional vector controller that resulted better implementa-tion. The proposed emotional controller has four gains, which
992

give good freedom than PVC for choosing desired responses in terms of overshot, settling time, steady state error and smo-othness. This makes the emotional controller effective and flexible in high performance applications. Moreover, it is strongly felt that an algorithm for optimum tuning of the BELBCIC could make it so much more efficient.
REFERENCES [1] C.K. Lin, T.H. Liu, C.H. Lo, “Sensor less interior permanent magnet
synchronous motor drive system with a wide adjustable speed range”, IEEE/IET, Vol.3, No.2, pp.133-146, March 2009.
[2] M. Jafarboland, E. Babaei, "Sensorless speed/position estimation for permanent magnet synchronous machine via extended Kalman filter", Jour. of Trans. on Elec. Tech. (JTET), Vol.1, No.1, pp.31-36, Winter 2009.
[3] V. Utkin, Sliding modes in control optimization: Springer Verlag, 1992. [4] M. Ilic-Spong, R. Marino, S. Peresada, and D. Taylor, "Feedback
linearizing control of switched reluctance motors," IEEE Transactions on Automatic Control., vol. 32, pp. 371 379, May 1987
[5] T. S. Radwan, M. A. Rahman, A. M. Osheiba, and A. E. Lashine, "Dynamic analysis of a high performance permanent magnet synchron-ous motor drive," iProeeding IEEE Canadian Conference in Electrical and Computer Engineering, pp. 611 614, 1996.
[6] M. A. Rahman and P. Lhou, "Analysis on brushless permanent magnet synchronous motors", IEEE Transactions on Industrial Electronics, vol. 43, pp. 256-267, April 1996.
[7] T. Sebastian, "Temperature effects on torque production and efficiency of PM motors using NdFeB magnets," IEEE Transactions on Industry Applications, vol. 3 1, no. 2, pp. 353-357, March/April 1995.
[8] P. H. Mellor, F. B. Chaaban, and K. J. Binns, "Estimation of parameters and performance of rare-earth permanent-magnet motors avoiding measurement of load angle," Proceedings, Institution of Electrical Engineers, vol. 133, pp: 322-330, November 1991.
[9] X. Xu, H-G He and D. Hu "Efficient Reinforcement Learning Using Recursive Least-Squares Methods" Journal of Artificial Intelligence Research 16, pp. 259-292, 2002.
[10] M. Fatourechi, C. Lucas, A. Khaki Sedigh "Reducing Control Effort by means of Emotional Learning" Proceedings of 9th Iranian Conference on Electrical Engineering, (ICEE200J), pp: 41-1 to 4 1-8, Tehran, Iran, May 2001.
[11] M. Fatourechi, C. Lucas, A. Khaki Sedigh "Reduction of Maximum Overshoot by means of Emotional Learning" Proceedings of 6th Annual CSI Computer Conference, pp: 460-467, Isfahan, Iran, February 2001.
[12] Jan Moren, Emotion and Learning: A Computational Model of the Amygdala", Ph.D thesis, ISSN 1101-8453, Lund University Cognitive Studies 93, Lund University, Sweden, 2002.
[13] J. Moren, C. Balkenius "A Computational Model of Emotional Learning in The Amygdala" From animals to animals 6: Proceedings of the International conference on the simulation of adaptive behavior" Cambridge, Mass, The MIT Press, 2000.
[14] M. A. Rahman, M. Vilathgamuwa, M.N. Uddin and K.J. Tseng, Non-Linear Control of Permanent Magnet Synchronous Motor", IEEE Transactions on Industry Applications, vol. 39, no. 2, pp. 569- 575, March/April 2003.
[15] M. A. Rahman, R. M. Milasi, Caro Lucas, B. N. Arrabi, T.S. Radwan,. "Implementation of Emotional Controller for Permanent Magnet Synchr-onous Motor Drive" IEEE 2008 Trns.
[16] W. Qian, S.K. Panda, J.X. Xu, "Torque ripple minimization in PM synchronous motors using iterative learning control", IEEE Trans. On Pow. Elec., Vol.19, No.2, pp.272-279, March 2004.
[17] F. Tahvili Pour Fard, G. Shahgholian, E. Daryabeigi, “Switched reluctance motor control SRM by using emotional learning (BELBIC)”, ICESDT, Tunisia, Nov. 2008.
[18] G. Shahgholian, S.M.A. Zanjani, S. Eshtehardiha, “Modeling and simulation of the permanent magnet synchronous motor”, STA, Tunnisia, 2007.
993