Embed Size (px)
Citation preview


1
SOMMAIRE
1 Tableau de correspondance cas tests / méthodes et modèles ___________ 5
1.1 Cas tests de vérification ______________________________________________ 5
1.2 Cas tests de validation _______________________________________________ 6
2 Vérification et validation d’un code de calcul _______________________ 7
2.1 Vérification du code _________________________________________________ 8
2.2 Vérification de la solution ____________________________________________ 8
2.3 Validation ________________________________________________________ 13
2.4 Vérification et validation dans Thétis __________________________________ 16
2.5 Références ________________________________________________________ 16
3 Vérification sur des solutions exactes ____________________________ 17
3.1 Étude du laplacien : ∆𝚿 = 𝟏 _________________________________________ 19
3.2 Étude du laplacien avec condition limite de Neumann non homogène _______ 23
3.3 Étude du laplacien en coordonnées polaires : ∆𝚿 = 𝟎 ____________________ 25
3.4 Étude de la conduction avec pénalisation sous maille _____________________ 27
3.5 Conduction stationnaire dans un bicouche _____________________________ 31
3.6 Écoulement de Couette en coordonnées polaires et cylindriques ____________ 35
3.7 Écoulement de Poiseuille plan ________________________________________ 39
3.8 Écoulement de Poiseuille plan instationnaire ___________________________ 41
3.9 Écoulement de Poiseuille plan à viscosité variable _______________________ 45
3.10 Écoulement de Poiseuille en coordonnées cylindriques et axisymétriques ____ 49
3.11 Écoulement Radial _________________________________________________ 51
3.12 Écoulement dans un canal 3D ________________________________________ 55
3.13 Changement d’état liquide/solide franc : fusion totale ____________________ 57
3.14 Changement d’état liquide/solide franc : fusion partielle __________________ 63
3.15 Changement d’état liquide/solide franc : problème de Stefan ______________ 67
3.16 Ecoulement compressible : injection d’eau dans une cavité fermée _________ 71
3.17 Ecoulement compressible : oscillations d’une bulle d’air dans de l’acier fondu 75
3.18 Ecoulement compressible : compression d’une bulle d’air ________________ 79

2
3.19 Advection d'une tâche circulaire dans un tourbillon avec cisaillement ______ 83
4 Écoulement isothermes monophasiques laminaires _________________ 87
4.1 Écoulement laminaire autour d’une marche descendante (E,N) ____________ 89
4.2 Écoulement laminaire autour d’un triangle (N) _________________________ 95
4.3 Écoulement laminaire autour d’un obstacle fin (E,N) ___________________ 101
4.4 Ecoulement laminaire autour d’un cylindre (E,N) ______________________ 105
4.5 Écoulement de la cavité entraînée 2D à Re=1000 (N) ____________________ 109
4.6 Écoulement de la double cavité entraînée (N) __________________________ 115
4.7 Écoulement de la cavité entraînée en forme de L (N) ____________________ 121
4.8 Écoulement dans un canal en forme de Z (N) __________________________ 127
5 Écoulement isothermes monophasiques turbulents ________________ 131
5.1 Écoulement turbulent dans un canal plan 2D à Re=5100 (N) _____________ 133
5.2 Écoulement turbulent autour d’une marche descendante à Re=5100 (E,N) _ 141
5.3 Écoulement turbulent avec changement de la rugosité de surface _________ 145
6 Écoulements convectifs laminaires _____________________________ 147
6.1 Convection naturelle dans une cavité carrée différentiellement chauffée (N) 149
6.2 Convection naturelle en milieu poreux ________________________________ 153
6.3 Convection naturelle dans une cavité carrée différentiellement chauffée avec
changement de phase liquide/solide (N) _____________________________________ 155
6.4 Convection mixte dans un canal 3D de section rectangulaire _____________ 159
7 Écoulements diphasiques _____________________________________ 163
7.1 Rupture de barrage sur sol sec ou en présence d’un film liquide préexistant
(A,E,N) _______________________________________________________________ 165
7.2 Propagation d’une onde solitaire (A,E,N) _____________________________ 171
7.3 Impact d’une onde solitaire sur une paroi (A,E,N) ______________________ 173
7.4 Remontée de bulle axisymétrique (E) _________________________________ 177
7.5 Benchmark pour l’évolution d’une bulle 2D (N) ________________________ 181
7.6 Sédimentation d’une particule solide en 2D (A) ________________________ 187
7.7 Etalement d’une lentille : prise en compte de la ligne triple (A, N) _________ 191
7.8 Essorage gravitaire (T) _____________________________________________ 195
7.9 Impact d’une goutte avec prise en compte de la mouillabilité (Exp, N) _____ 199
7.10 Croissance d’une instabilité capillaire dans un champ de pesanteur _______ 205

3


5
1 Tableau de correspondance cas tests / méthodes et modèles
1.1 Cas tests de vérification
Nav
ier-
Sto
kes
Eq
. E
ner
gie
Eq
. T
ran
spo
rt
Lap
laci
en
Mo
dèl
es R
AN
S
LE
S
Ch
ang
emen
t d
‘éta
t
Éco
ule
men
ts d
iph
asiq
ues
Ad
vec
tion
VO
F-T
VD
Ad
vec
tion
VO
F-P
LIC
Ad
vec
tion
Lev
el-S
et
Ad
vec
tion
VO
F-S
M
Ten
sio
ns
de
surf
ace
Mai
llag
e ca
rtés
ien
Mai
llag
e po
lair
e
Mai
llag
e ax
isy
mét
riq
ue
Mai
llag
e cy
lin
dri
qu
e
Mai
llag
es m
ult
iblo
cs
Gri
lle
du
ale
Lag
ran
gie
n a
ug
men
té
Pro
ject
ion
vec
tori
elle
Co
rrec
tio
n d
e p
ress
ion
Pér
iod
iqu
e (s
pat
ial)
Pén
alis
atio
n s
ou
s-m
aill
e
Ver
sio
n s
équ
enti
elle
Ver
sio
n p
aral
lèle
VERIFICATION
Laplacien en coordonnées cartésiennes (1) ● ● ● ● ●
Laplacien en coordonnées cartésiennes (2) ● ● ● ● ●
Laplacien en coordonnées polaires ● ● ● ●
Conduction avec pénalisation sous-maille ● ● ● ● ●
Conduction stationnaire dans un bicouche ● ● ● ●
Poiseuille plan ● ● ● ● ● ● ● ● ●
Poiseuille plan instationnaire ● ● ● ● ● ● ●
Poiseuille viscosité variable ● ● ● ● ● ● ●
Poiseuille axisymétrique/cylindrique ● ● ● ● ● ● ● ●
Écoulement de Couette ● ● ● ● ● ● ● ●
Écoulement radial ● ● ● ● ● ● ●
Canal 3D ● ● ● ● ● ● ●
Fusion totale ● ● ● ● ●
Fusion partielle ● ● ● ● ●
Problème de Stefan ● ● ● ● ●
Injection d‘eau dans une cavité fermée
(compressible) ●
●
● ● ●
Oscillation d‘une bulle d‘air dans de
l‘acier fondu (compressible) ●
●
● ● ● ●
Compression d‘une bulle d‘air ● ● ● ● ● ●
Adection d‘une tâche avec cisaillement ● ● ● ● ● ● ●

6
1.2 Cas tests de validation
Nav
ier-
Sto
kes
Eq
. E
ner
gie
Eq
. T
ran
spo
rt
Lap
laci
en
Mo
dèl
es R
AN
S
LE
S
Ch
ang
emen
t d
‘éta
t
Éco
ule
men
ts d
iph
asiq
ues
Ad
vec
tion
VO
F-T
VD
Ad
vec
tion
VO
F-P
LIC
Ad
vec
tion
Lev
el-S
et
Ad
vec
tion
VO
F-S
M
Ten
sio
ns
de
surf
ace
Mai
llag
e ca
rtés
ien
Mai
llag
e po
lair
e
Mai
llag
e ax
isy
mét
riq
ue
Mai
llag
e cy
lin
dri
qu
e
Mai
llag
es m
ult
iblo
cs
Gri
lle
du
ale
Lag
ran
gie
n a
ug
men
té
Pro
ject
ion
vec
tori
elle
Co
rrec
tio
n d
e p
ress
ion
Pér
iod
iqu
e (s
pat
ial)
Pén
alis
atio
n s
ou
s-m
aill
e
Ver
sio
n s
équ
enti
elle
Ver
sio
n p
aral
lèle
VALIDATION
Écoul. laminaire autour d‘une marche ● ● ● ● ● ● ● ●
Écoul. laminaire autour d‘un triangle ● ● ● ●
Écoul. laminaire autour d‘un bloc fin ● ● ● ●
Écoul. laminaire autour d‘un cylindre ● ● ● ● ●
Cavité entraînée ● ● ● ● ● ● ● ●
Double cavité entraînée ● ● ● ● ● ● ● ●
Cavité entraînée en forme de L ● ● ● ● ● ● ● ●
Canal en forme de Z ● ● ● ● ● ● ● ●
Canal plan turbulent ● ● ● ● ● ● ● ●
Écoul. turbulent autour d‘une marche ● ● ● ● ●
Écoul. Turbulent avec changement de
rugosité ●
●
● ● ●
Convection naturelle ● ● ● ● ● ● ●
Convection naturelle en milieu poreux ● ● ● ● ● ● ●
Convection naturelle avec changement
d‘état ● ●
●
● ● ● ● ● ●
Convection mixte ● ● ● ● ● ● ●
Rupture de barrage ● ● ● ● ● ● ● ● ●
Propagation d‘une onde solitaire ● ● ● ● ● ● ● ● ● ● ●
Impact d‘une onde solitaire sur une paroi ● ● ● ● ● ● ● ● ● ●
Remontée de bulle axisymétrique ● ● ● ● ● ● ● ●
Remontée d‘une bulle (Benchmark) ● ● ● ● ● ● ● ●
Sédimentation d‘une particule solide ● ● ● ● ● ●
Etalement d‘une lentille (ligne triple) ● ● ● ● ● ● ● ● ●
Essorage gravitaire ● ● ● ● ● ● ● ●
Impact d‘une goutte avec prise en compte
de la mouillabilité ●
●
●
● ● ● ● ● ●
Croissance d‘une instabilité capillaire dans
un champ de pesanteur ●
●
●
● ● ● ● ● ●

7
2 Vérification et validation d’un code de calcul La vérification et la validation d‘un code de calcul sont des étapes nécessaires à la réalisation
d‘un outil numérique fiable. Ces concepts sont développés dans [1] et [2] et plus largement
dans [3] dont nous reprenons dans la suite de ce chapitre les principaux points.
La vérification, en rapport avec les mathématiques, vise à analyser la solution numérique
d’un modèle numérique alors que la validation, en rapport avec la physique, vise à analyser
la capacité des modèles à représenter un phénomène physique réel. Autrement dit, la
vérification peut-être vue comme un processus visant à la résolution correcte des équations,
alors que la validation est d‘abord en rapport avec le choix des équations à reproduire un
phénomène physique. De manière rigoureuse, la vérification et la validation d‘un code
demanderaient des preuves que les algorithmes convergent vers les solutions correctes des
équations, en toute circonstance. Ceci est bien entendu impossible à réaliser et l‘on glisse
alors, d‘un point de vue pratique, vers le concept d’accumulation d’évidence que le code
fonctionne et l’absence de preuve que le code est incorrect.
La vérification est le processus qui détermine si l‘implémentation d‘un modèle et des
méthodes numériques associées représente précisément sa description conceptuelle et sa
solution. La stratégie fondamentale de la vérification est l‘identification, la quantification et la
réduction des erreurs dans le modèle numérique et sa solution. Pour quantifier les erreurs
numériques, des solutions très précises ou exactes doivent être utilisées. Elles ne sont
malheureusement bien souvent disponibles que pour des modèles simplifiés. La vérification
fournit donc des preuves que le modèle continu est résolu correctement par l‘approche
discrète choisie dans le code de calcul. Elle ne nécessite aucun lien avec la réalité d‘un
phénomène physique, c‘est essentiellement un processus mathématique et informatique.
Les 6 sources majeures d‘erreurs en mécanique des fluides numérique sont le non respect des
conditions de stabilité des méthodes numériques, une convergence spatiale insuffisante, une
convergence temporelle insuffisante, une convergence insuffisante des méthodes itératives
utilisées, les erreurs d‘arrondis et les erreurs de programmations. Il y a 2 aspects
fondamentaux dans la vérification : la vérification du code et celle de la solution. La première
vise à s‘assurer qu‘il n‘y a pas de « bugs » dans le code ou de solutions inconsistantes, la
seconde est le processus qui quantifie les erreurs numériques qui existent dans toute
simulation (erreurs d‘arrondis, des méthodes itératives, de discrétisation, etc.).
La validation est le processus qui détermine le degré auquel le modèle offre une
représentation précise d‘un phénomène physique dans la perspective d‘une utilisation des
résultats. Il s‘agit donc de comparer des solutions numériques précises à des résultats
expérimentaux (où théoriques). La stratégie de validation consiste en l‘identification et la
quantification des erreurs et incertitudes dans les modèles continus et discrets, la
quantification des erreurs numériques de la solution numérique, l‘estimation des erreurs
expérimentales et finalement la comparaison entre les solutions numériques et expérimentales.
Cette stratégie ne suppose pas que les mesures expérimentales sont plus précises que les
solutions numériques mais plutôt qu‘elles sont le moyen le plus fidèle de représenter cette
réalité dans un but de validation.

8
2.1 Vérification du code
Il faut tout d‘abord mettre en place dans le développement du logiciel une politique qualité
(« software quality engineering ») qui définit un ensemble de procédures permettant de
s‘assurer que le logiciel est fiable. Les aspects principaux incluent le planning, la gestion des
sources, leur compilation, les tests et la documentation. Le planning vise notamment à
maitriser le développement des différentes versions d‘un code. La gestion des sources
recouvre un ensemble de pratiques telles que la mise en œuvre de standard de programmation,
les procédures d‘intégration de nouveaux développements, la gestion des modifications, etc.
La compilation et les tests doivent être réalisés de manière variée (avec différentes option de
compilation) et sur plusieurs plate-formes et compilateurs. Les résultats ne doivent pas varier
de manière significative (à un epsilon près proche de la précision machine) d‘une plate-forme
à l‘autre, d‘un compilateur à l‘autre. Il est important de mettre en place un ensemble de cas
tests de non régression, recouvrant toute les fonctionnalités d‘un code (modèles, équations,
méthodes, utilitaires, etc.), ainsi qu‘un système de collecte des erreurs/différences afin de les
connaître et de les corriger, car un code modifié est un nouveau code qu‘il faut re-vérifier.
La vérification du code inclut la vérification de la solution (cf. section suivante) sur un
ensemble de problèmes dont la solution exacte est connue ou construite. L‘approche des
solutions exactes consiste à comparer la solution numérique à la solution exacte des EDP
associées à un ensemble de conditions initiales et aux limites. Les cas des écoulements de
Couette ou de Poiseuille pour les équations de Navier-Stokes entrent dans cette catégorie.
Plutôt que de chercher des solutions exactes à un système d‘EDP, il est aussi possible de
construire une solution exacte à un système d‘EDP légèrement modifié. On choisit
généralement une solution a priori, sur laquelle on applique le système d‘EDP afin de générer
un terme source analytique. La solution choisie est alors la solution du système d‘EDP auquel
on a ajouté le terme source. C‘est le cas par exemple du tourbillon de Taylor-Green.
2.2 Vérification de la solution
2.2.1 Erreur et vérification
La vérification est basée sur la quantification et l‘estimation d‘erreurs sur un ou plusieurs
problèmes tests. Soit f une quantité issue de la résolution d‘une EDP. L‘erreur est définie
comme :
𝐸 = 𝑓𝑒𝑥𝑎𝑐𝑡𝑒 − 𝑓𝑑𝑖𝑠𝑐𝑟 è𝑡𝑒 (1)
où fexacte est la solution exacte de l‘EDP pour un ensemble de conditions initiales et aux
limites, fdiscrète est la solution discrète et || || désigne une norme dont la nature est l‘objet
d‘un paragraphe dans la suite de ce chapitre.
E dépend de la discrétisation caractérisée par une dimension caractéristique h (pas d‘espace)
et un pas de temps (et éventuellement d‘autres paramètres liés à des méthodes itératives).
Soit fh,0 la limite quand h 0 et 0 de la solution exacte des EDP sous leurs formes
discrètes. E peut s‘écrire :

9
𝐸 ≤ 𝑓𝑒𝑥𝑎𝑐𝑡𝑒 − 𝑓 ,𝜏→0 + 𝑓 ,𝜏→0 − 𝑓 ,𝜏 ,𝐼,𝑐 ≤ ε (2)
où fh,,I,c est une solution discrète pour un certain pas d‘espace h et pas de temps ,
pour des paramètres de convergence I (tolérance des solveurs itératifs par exemple) et un
ordinateur c.
En principe, le premier terme 𝑓𝑒𝑥𝑎𝑐𝑡𝑒 − 𝑓 ,𝜏→0 est nul, selon des principes sous-jacents aux
méthodes numériques de résolution des EDP (par exemple pour des équations linéaires et
schémas stables et consistants). C‘est le travail des mathématiciens et numériciens de s‘en
assurer.
Le second terme 𝑓 ,𝜏→0 − 𝑓 ,𝜏 ,𝐼,𝑐 est non nul en raison de valeur finies de h et , de I, de la
précision des ordinateurs et des erreurs de programmation. L‘analyse de ce terme est du
ressort de la vérification.
2.2.2 Estimation de l’ordre de convergence et de l’erreur
Un schéma numérique est consistant si les équations discrètes approchent les équations aux
dérivées partielles originales quand les tailles des éléments de discrétisation (le pas d‘espace
h, le pas de temps τ) tendent vers zéro. À des fins de vérification, les erreurs de discrétisation
𝐸𝑘 sur un maillage hk et pour un pas de temps τ sont définies comme la différence entre la
solution discrète fk,τ et la solution des EDP originales fexacte :
𝐸𝑘 = 𝑓𝑒𝑥𝑎𝑐𝑡𝑒 − 𝑓𝑘 ,𝜏 (3)
où k définit le niveau de maillage.
2.2.2.1 Estimation a posteriori de l’ordre de convergence
Le test le plus rigoureux de vérification d‘un code est celui de l‘ordre de convergence qui
détermine ou non si l‘erreur de discrétisation est celle attendue. L‘ordre de convergence
formel est déterminé par l‘erreur de troncature qui est la différence entre l‘équation discrétisée
et l‘EDP sous sa forme continue. Pour un schéma d‘ordre p > 0 en espace et q > 0 en temps,
on a :
𝑓𝑒𝑥𝑎𝑐𝑡𝑒 − 𝑓𝑘 ,𝜏 = 𝑂(𝑝 , 𝜏𝑞) (4)
L‘ordre de convergence observé est directement calculé à partir des solutions d‘un ensemble
de simulations. Il peut-être affecté par des erreurs de programmation, des solutions qui ne sont
pas suffisamment régulières, des algorithmes défaillants, des solutions numériques qui ne sont
pas dans la zone de convergence asymptotique. Cette dernière est définie comme la gamme de
pas d‘espace et de temps pour lesquels les termes de plus petits ordre dans les erreurs de
troncature dominent.
L‘aspect principal dans la vérification de la solution est l‘estimation des erreurs numériques
qui ont trois sources principales : les erreurs d‘arrondis, les erreurs des algorithmes itératifs et
les erreurs de discrétisation (à l‘intérieur du domaine et aux limites). Les premières sont dues
à la précision finie des ordinateurs. Les erreurs des algorithmes itératifs peuvent être dues à

10
une convergence insuffisante (d‘où l‘intérêt d‘utiliser dans la phase de vérification des
solveurs direct plutôt qu‘itératifs). L‘estimation des erreurs de discrétisation se fait a
posteriori, une fois les solutions numériques d‘une simulation connue.
Lorsqu‘une solution exacte est connue, il faut répondre aux questions suivantes :
la solution discrète converge-t-elle vers la solution exacte quand le maillage
augmente et quand le pas de temps diminue ?
quel est l‘ordre de convergence, en temps et en espace de la discrétisation ?
Pour répondre à ces questions la méthode d‘extrapolation de Richardson est utilisée [4]. Elle
repose sur le raffinement systématique du maillage et du pas de temps pour des problèmes
spécifiques et suppose que les erreurs de discrétisation tendent asymptotiquement vers 0
quand le pas d‘espace et le pas de temps tendent vers 0 (à la précision machine près). Si
l‘ordre de convergence est constant avec la décroissance du maillage et du pas de temps, on
dit alors que l‘on se trouve dans la zone asymptotique de convergence. L‘étude de cette zone
est importante pour répondre aux questions ci-dessus. Quand la zone asymptotique de
convergence est mise en évidence, l‘extrapolation de Richardson peut alors être utilisée pour
estimer la solution discrète convergée.
Si l‘on considère un problème stationnaire (par souci de simplicité) pour lequel une solution
exacte existe, et une série de solutions discrètes 𝑓𝑘(1 ≤ 𝑘 ≤ 𝑁) sur N grilles emboitées de pas
d‘espace constant hk, alors, selon 2 hypothèses formulées ci-dessous, la solution exacte 𝑓→0
du problème peut s‘écrire sous la forme :
𝑓→0 = 𝑓𝑘 + 𝐶𝑘𝑝 + 𝑂(𝑘
𝑝+1) (5)
où fk est la solution numérique sur le maillage k, C une constante et p l‘ordre de
convergence observé.
La première hypothèse est que la solution soit suffisamment régulière pour justifier
l‘utilisation du développement de Taylor, la seconde que les pas d‘espaces hk soient
suffisamment petits pour que les solutions 𝑓𝑘 se trouvent dans la zone asymptotique de
convergence.
L‘ordre de convergence p peut être calculé à partir de 2 maillages h1 et h2 en prenant le log du
rapport des erreurs E2/E1 :
𝑝 =𝑙𝑛
𝐸2𝐸1
𝑙𝑛 21
(6)
où 𝐸𝑘 = 𝑓𝑒𝑥𝑎𝑐𝑡𝑒 − 𝑓𝑘
Ainsi, quand une solution analytique est connue, seulement 2 solutions numériques sont
nécessaires pour mesurer l‘ordre de convergence. Il faut bien remarquer que l‘ordre ainsi
calculé sera celui des erreurs de troncature à condition de se trouver dans la zone de
convergence asymptotique.

11
Dans la pratique, le calcul de l‘ordre de convergence se fait généralement sur plus de 2
maillages. L‘ordre de convergence local est alors calculé entre deux maillages consécutifs par
la formule précédente et doit tendre vers l‘erreur de troncature. On peut aussi tracer la courbe
en échelle log/log des erreurs Ek en fonction du nombre de points Nk des maillages. Les points
de la courbe se trouvant dans la zone asymptotique forment une droite dont la pente donne
l‘ordre de convergence. En effet, si l‘on prend le logarithme de l‘équation (5), on obtient :
log 𝐸𝑘 = log 𝐶 + 𝑝log(𝑘)
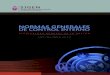
On peut aussi tracer l‘évolution de la pente locale. La zone asymptotique correspond à la
partie où la courbe est une droite horizontale (l‘ordonnée donne alors l‘ordre de convergence).
Il faut bien noter que seul le calcul de l’ordre local sur plusieurs maillages consécutifs ou le
tracé des erreurs en échelle log/log permettent de vérifier que l’on se trouve dans la zone
asymptotique de convergence et donc de vérifier que l’ordre de convergence observé est
conforme à l’ordre de convergence formel.
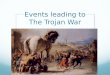
La figure 1 est un exemple de courbe de convergence. Sont représentées les erreurs en
fonction du maillage sur une échelle log/log ainsi que les droites de pente 1 et 2. La figure
montre un exemple de courbe de convergence par représentation de l‘ordre local de
convergence en fonction du maillage.
Figure 1. Exemple de courbe d’ordre de convergence en échelle log/log
1.0E-10
1.0E-09
1.0E-08
1.0E-07
1.0E-06
1.0E-05
1.0E-04
1.0E-03
1 10 100 1000
Erre
ur
N
Schéma 1
Schéma 2
Ordre 2
Ordre 1

12
Figure 2. Exemple de courbe d’ordre de convergence local
L‘ordre de convergence peut être calculé localement dans le domaine ou bien en utilisant une
norme de l‘erreur de discrétisation. Les normes L∞, L
1 et L
2 des erreurs absolues ou relatives
sont généralement utilisées (mais ne sont pas toujours toutes équivalentes au regard de la
convergence) :
𝐸𝑘 ∞ = max𝑖 (𝑓𝑒𝑥𝑎𝑐𝑡𝑒 − 𝑓𝑘)𝑖 où 𝐸𝑘 ∞ = max𝑖 (𝑓𝑒𝑥𝑎𝑐𝑡𝑒 −𝑓𝑘)𝑖
𝑓𝑒𝑥𝑎𝑐𝑡𝑒 𝑖
𝐸𝑘 1 = 𝑓𝑒𝑥𝑎𝑐 𝑡𝑒 − 𝑓𝑘 𝑑𝑣𝑉
où 𝐸𝑘 1 = 𝑓𝑒𝑥𝑎𝑐𝑡𝑒 −𝑓𝑘
𝑓𝑒𝑥𝑎𝑐𝑡𝑒 𝑑𝑣
𝑉
𝐸𝑘 2 = (𝑓𝑒𝑥𝑎𝑐𝑡𝑒 − 𝑓𝑘)2𝑑𝑣𝑉
où 𝐸𝑘 2 = (𝑓𝑒𝑥𝑎𝑐𝑡𝑒 −𝑓𝑘
𝑓𝑒𝑥𝑎𝑐𝑡𝑒)2𝑑𝑣
𝑉
Pour un problème instationnaire et l‘étude de la convergence temporelle, les développements
précédents sont valables à condition de remplacer le pas d‘espace h par le pas de temps τ. Il
faut par contre s‘assurer que les erreurs observées soient bien dominées par celles provenant
de la discrétisation temporelle et non par celles de la discrétisation spatiale. On travaille
généralement alors avec des maillages assez fins afin d‘éviter de saturer l‘erreur temporelle,
quand le pas de temps est petit, par l‘erreur spatiale. Pour un problème instationnaire, on peut
aussi étudier la convergence spatiale en analysant les solutions à un temps T0 donné et en
conservant le même pas de temps pour toutes les simulations. Ce dernier doit être choisi
suffisamment petit afin que les erreurs de discrétisation temporelles ne saturent pas l‘erreur de
discrétisation spatiale.
L‘ordre de convergence peut-être affecté par des erreurs de programmation dans le domaine
de calcul ou bien aux limites. Si la programmation des conditions aux limites (condition de
Neumann par exemple) n‘est pas du même ordre que celui des schémas de discrétisation,
l‘ordre de convergence peut alors en être affecté. L‘ordre de convergence peut alors varier
dans l‘espace, dépendant de la proximité des conditions aux limites. Enfin, les singularités et
les discontinuités d‘un écoulement compliquent également le processus de vérification.
0
0.5
1
1.5
2
2.5
0 50 100 150 200 250 300

13
2.3 Validation
La validation examine si les modèles conceptuels, les méthodes numériques associés, leur
implémentation et les simulations d‘un code sont en accord avec la réalité observée. La
stratégie est d‘identifier et de quantifier les erreurs et incertitudes en comparant les solutions
avec des données expérimentales (ou des solutions théoriques du problèmes). Ces dernières
contiennent d‘ailleurs des erreurs qu‘il faut également quantifier et documenter. La précision
demandée dans la validation est dépendante du problème traité.
Un code de CFD ne peut être validé que sur un ensemble d‘applications pour lesquelles des
données expérimentales sont disponibles. Ainsi, on valide plutôt un modèle, un ensemble de
modèles et des simulations plutôt qu‘un code dans sa totalité. Utiliser un code au-delà de son
domaine de validité est appelé prédiction.
Le processus de validation implique d‘examiner la convergence des méthodes itératives, la
consistance et la stabilité de la solution, la convergence spatiale et la convergence temporelle,
de comparer les solutions aux résultats expérimentaux et d‘examiner les incertitudes des
modèles. Ces différents aspects de l‘activité de validation sont abordés dans les sections
suivantes. Ils forment un cadre permettant d‘aboutir à des simulations de qualité y compris
pour celle de type prédictives pour lesquelles les données expérimentales manquent.
2.3.1 Examiner la convergence des méthodes itératives.
Les méthodes itératives sont bien souvent au cœur des codes de calcul. Elles sont contrôlées
par un nombre d‘itérations à effectuer ainsi que par une tolérance indicatrice de convergence
(résidu pour un solveur itératif, variation temporelle relative pour la recherche d‘une solution
stationnaire, etc.). Une bonne compréhension de l‘influence des paramètres associés aux
méthodes itératives et des conséquences de leurs valeurs sur une simulation sont
indispensables à l‘utilisation d‘un code de calcul. Par exemple le choix du pas de temps peut
conduire à une convergence plus ou moins rapide d‘une simulation d‘un écoulement
stationnaire, voire, s‘il est choisi trop grand, à une oscillation de la solution ou à une
divergence du calcul. L‘analyse d‘une simulation ne se fait qu‘une fois les méthodes itératives
convergées jusqu‘à une « certaine » tolérance en dessous de laquelle il n‘est pas nécessaire de
descendre en vue de l‘établissement du phénomène à observer à la précision souhaitée. La
combinaison des méthodes itératives dans les codes de calcul ajoute à leurs complexités.
2.3.2 Examiner la consistance et la stabilité de la solution.
La consistance d‘une solution peut être vérifiée par des bilans de flux ou de quantité au
travers des surfaces de contrôle ou dans le domaine. Ces bilans sont fonction des
simulations (conservation des débits entre l‘entrée et la sortie du domaine, bilan énergétique,
conservation de la masse, etc.).
Il est également essentiel de s‘assurer que les conditions de stabilité des schémas (CFL,
Nombre de Peclet locaux, monotonie, etc.) sont bien vérifiées au risque d‘obtenir des
solutions spatialement oscillantes voire complètement incohérentes.

14
2.3.3 Examiner la convergence spatiale.
Ce point a été détaillé dans la section précédente dans le cadre de l‘existence d‘une solution
exacte au problème. Néanmoins, dans le cadre d‘une validation, cette dernière n‘est pas
disponible. Le calcul de l‘ordre de convergence se fait donc à partir de 3 ou 4 maillages. Pour
vérifier si les simulations se situent dans la zone asymptotique de convergence, l‘estimation a
posteriori de l‘erreur est nécessaire. Selon les problèmes, le choix de la quantité sur laquelle
est estimé l‘ordre de convergence peut s‘avérer délicat.
Ordre de convergence
L‘ordre de convergence peut aussi être calculé à l‘aide des erreurs sur 3 ou 4 maillages situés
dans la zone asymptotique à l‘aide de l‘extrapolation de Richardson. En utilisant 3 grilles
telles que 1
2=
2
3, l‘ordre de convergence p est donné par :
𝑝 =ln(
𝑓1−𝑓2
𝑓2−𝑓3
)
ln (12
) (7)
Si 4 maillages sont utilisés vérifiant 1
3=
2
4 alors :
𝑝 =ln(
𝑓1−𝑓3
𝑓2−𝑓4
)
ln (12
) (8)
Le développement de Taylor n‘est valable pour les problèmes multidimensionnels que si le
rapport d‘aspect de cellules est gardé constant quelque soit N. Si N grilles uniformes de pas
d‘espace Δxi, Δyi et Δzi (1 ≤ 𝑖 ≤ 𝑁) sont utilisées, alors les rapports ∆𝑥𝑖
∆𝑧𝑖 et
∆𝑦𝑖
∆𝑥𝑖 doivent être
égaux quelque soit i.
Extrapolation et estimation a posteriori de l’erreur
L‘extrapolation de Richardson est une méthode qui sert à obtenir une solution des EDP
d‘ordre supérieure à celle des solutions discrètes. Soient 2 grilles i et j, telle que hj/hi<1, se
trouvant dans la zone de convergence asymptotique (on prendra les deux dernières grilles
ayant servies au calcul de l‘ordre de convergence). L‘ordre de convergence p a été vérifié par
la méthode précédente. On a :
𝑓→0 = 𝑓𝑖 + 𝐶𝑖𝑝 + 𝑂(𝑖
𝑝+1)
𝑓→0 = 𝑓𝑗 + 𝐶𝑗𝑝 + 𝑂(𝑗
𝑝+1)
soit
𝐶𝑗𝑝 =
𝑓𝑖−𝑓𝑗
1−(𝑖𝑗
)𝑝 + 𝑂 𝑖
𝑝+1 + 𝑂 𝑗𝑝+1 (9)
et

15
𝑓→0 = 𝑓𝑗 +𝑓𝑖−𝑓𝑗
1−(𝑖𝑗
)𝑝 + 𝑂 𝑖
𝑝+1 + 𝑂 𝑗
𝑝+1 (10)
Le terme entre crochets représente l‘extrapolation à l‘ordre p+1 de la solution discrète vers la
solution exacte. L‘erreur de discrétisation a posteriori, pour fi par exemple, est donnée par :
𝑓→0 − 𝑓𝑖 = 𝑓𝑖−𝑓𝑗
𝑗𝑝−
𝑖𝑝 𝑖
𝑝 + 𝑂 𝑖𝑝+1 + 𝑂 𝑗
𝑝+1 (11)
L‘extrapolation de Richardson repose sur la mise en évidence de la zone asymptotique de
convergence. Un moyen de la démontrer est de calculer 3 solutions. Les solutions pour les
grilles fines et moyennes sont supposées être dans la zone asymptotique. La relation (10) est
utilisée pour calculer la solution exacte. L‘erreur sur la grille grossière peut alors être
calculée. Si elle n‘est pas très proche de celle attendue (calculée par la relation 11), alors on
peut dire que la solution grossière n‘est pas dans la zone asymptotique de convergence. Par
exemple, si la grille est divisée par deux dans chaque direction de l‘espace à chaque
raffinement, pour un schéma d‘ordre 2, l‘erreur sur la grille grossière devrait être 16 fois
supérieure à l‘erreur sur la grille la plus fine (et 4 fois supérieure à celle sur la grille
moyenne).
2.3.4 Examiner la convergence temporelle.
Pour les problèmes stationnaires, il s‘agit de vérifier que les quantités n‘évoluent plus dans le
temps ; la variation relative des solutions des EDP d‘une itération sur l‘autre peut être utilisée
à ces fins. Pour les problèmes instationnaires, il s‘agit de vérifier la sensibilité des simulations
à un changement du pas de temps et leur cohérence avec l‘ordre de convergence formel du
schéma temporel. En effet des sources d‘erreurs sont généralement liées au filtrage temporel
des différentes échelles temporelles présentes dans un écoulement instationnaire par le choix
d‘un pas de temps trop grand.
2.3.5 Comparer les solutions aux résultats expérimentaux.
On espère trouver un bon accord avec ces derniers et augmenter ainsi la confiance dans la
capacité aux modèles et au code de représenter des phénomènes physiques pour cette classe
de simulation. Pour les phénomènes physiques complexes, il faut mettre en place plusieurs
phases de validation consécutives, de plus en plus complexes, faisant intervenir la physique,
la géométrie et leurs interactions. Les données expérimentales étant entachées d‘incertitudes
et d‘erreurs, ces dernières doivent être connues et présentes dans les documents de
comparaison (courbes, valeurs brutes, etc.)
2.3.6 Examiner les incertitudes des modèles
Les modèles physiques présents dans les codes de CFD contiennent des incertitudes dues à
une connaissance partielle des phénomènes physiques, comme par exemple en turbulence.

16
2.4 Vérification et validation dans Thétis
Ce document présente un ensemble de cas tests servant à la vérification sur des solutions
analytiques (chapitre 3) et à la validation du code de calcul. Ce dernier point est scindé en
plusieurs chapitres abordant les écoulements incompressibles monophasiques laminaires, les
écoulements incompressibles monophasiques turbulents, les écoulements convectifs
laminaires, les écoulements diphasiques. C‘est un ensemble de cas tests de non régression
dont nous assurons, version après version, la validité.
D‘un point de vue de la gestion du code, les sources des différentes versions sont archivées,
les modifications documentées de version en version. Le code source est compilé sur
plusieurs plates-formes différentes (32b, 64b, Intel Xeon, Intel Itanium, AMD Opteron, IBM
Power, Linux, Windows, AIX), avec différents compilateurs et options de compilation (Intel,
gfortran, xlf, g95). Le comportement du code Thétis est homogène sur l‘ensemble de ces
architectures.
2.5 Références
[1] W. L. Oberkampf & T. G. Trucano. Verification and Validation in Computational Fluid
Dynamics. Sandia National Laboratories Report. SAND2002-0529.
[2] C.J. Roy. Review of code and solution verification procedures for computational
simulation. Journal of Computational Physics 205 (2005) 131-156.
[3] P.J. Roache. Verification and Validation in Computational Science and Engineering.
Hermosa Publishers, Albuquerque, NM, 1998.
[4] Richardson L.F., Gaunt J.A., The Deferred Approach to the Limit. Transactions of te
Royal Society of London, Series A : Mathematical and Physical Sciences, Vol. 226, 1927 ;
299-361.

17
3 Vérification sur des solutions exactes


19
3.1 Étude du laplacien : ∆𝚿 = 𝟏
3.1.1 Intérêt L‘opérateur laplacien est présent dans de nombreuses équations : équation de l‘énergie,
modèles RANS, équation de transport. Nous vérifions ici l‘ordre de convergence associé à la
discrétisation de cet opérateur sur un maillage cartésien à pas constant ou variable ainsi que
sur un maillage mulitbloc non-conforme.
3.1.2 Description Le problème à résoudre, dans un domaine rectangulaire Ω de longueur a et de hauteur b, est le
suivant :
∆Ψ = 1 𝑠𝑢𝑟 Ω
Ψ = 0 𝑠𝑢𝑟 𝜕Ω
La solution est :
Ψ 𝑥, 𝑧 = 16 sin
(2𝑖 + 1)𝜋𝑥𝑎 sin
(2𝑗 + 1)𝜋𝑧𝑏
𝜋4 2𝑖 + 1 (2𝑗 + 1) (2𝑖 + 1)2
𝑎2 +(2𝑗 + 1)2
𝑏2
∞
𝑗 =0
∞
𝑖=0
3.1.3 Modèles et méthodes numériques Le laplacien est résolu avec un terme source constant et égal à 1. Ψ est fixé à zéro sur toutes
les limites. Des maillages à pas constant et variable (de type Chebichev) de 162 à 256
2 sont
utilisés. Le domaine est rectangulaire (a=1 et b=0.5). Ce cas a aussi été testé sur un maillage
multibloc constitué de deux blocs non conformes (cf. figure 1).
Le système linéaire est inversé avec le solveur direct MUMPS. Ce cas tourne aussi bien en
séquentiel qu‘en parallèle pour le cas monobloc, en séquentiel uniquement pour le cas
multibloc.
Figure 1. Maillage multibloc non-conforme
3.1.4 Résultats et commentaires Le tableau 1 et la figure 2 donnent les erreurs en fonction du maillage (à pas constant et
variable) sur un maillage monobloc. Le tableau 2 et la figure 3 donnent les mêmes grandeurs

20
mais sur un maillage multibloc. Les erreurs sont en O(Δx2) et conformes au schéma centré
utilisé pour discrétiser cet opérateur ainsi qu‘à l‘ordre du polynôme d‘interpolation servant à
l‘interpolation de la solution à l‘interface entre les blocs.
N Erreur pas Cst
Ordre local Erreur pas variable Ordre local
16 2.57882E-05 1.43267E-05
32 6.63861E-06 1.96 3.55798E-06 2.01
64 1.67672E-06 1.99 8.91847E-07 2.00
128 4.21622E-07 1.99 2.23433E-07 2.00
256 1.06245E-07 1.99 5.90415E-08 1.92
Tableau 1. Norme L1 de l’erreur en fonction du maillage pour le laplacien sur un maillage
monobloc
Figure 2. Norme L
1 de l’erreur en fonction du maillage pour le laplacien sur un maillage
monobloc
N Erreur Ordre local
322
+ 102 0.1188E-04
642
+ 202 0.2886E-05 2.04
1282
+ 402 0.7201E-06 2.00
2562
+ 802 0.1914E-06 1.91
Tableau 2. Norme de l’erreur en fonction du maillage pour le laplacien sur un maillage
multibloc
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
10 100 1000
Erre
ur
N
Pas constant
Pas variable

21
Figure 3. Norme L
1 de l’erreur en fonction du maillage pour le laplacien sur un maillage
multibloc
La figure 4 montre le champ Ψ pour un maillage 128x128 monobloc.
Figure 4. 𝛹 pour un maillage 128x128
3.1.5 Fichiers de données associés laplacien.don pour le cas monobloc.
laplacien_gbncf.don pour le cas multibloc.
1.0E-07
1.0E-06
1.0E-05
10 100 1000
Erre
ur
N


23
3.2 Étude du laplacien avec condition limite de Neumann non
homogène
3.2.1 Intérêt Nous vérifions ici la résolution de l‘opérateur laplacien avec des conditions limites de
Neumann non homogènes.
3.2.2 Description Le problème à résoudre, dans un domaine rectangulaire Ω de longueur a et de hauteur b, est le
suivant :
∆Ψ = 0 𝑠𝑢𝑟 Ω=[0,1]x[0,1]
𝜕
𝜕𝑛= 𝑓(𝑥, 𝑦) 𝑠𝑢𝑟 𝜕Ω
Nous choisissons comme solution =x2-y
2.
3.2.3 Modèles et méthodes numériques Le laplacien est résolu Des maillages à pas constant et variables (de type Chebichev) de 16
2 à
2562 sont utilisés. Le système linéaire est inversé avec un solveur itératif (parallèle ou
séquentiel).
3.2.4 Résultats et commentaires Le tableau 1 donne les normes L
2 de l‘erreur par rapport à la solution exacte. Elles sont de
l‘ordre de la précision machine, ce qui est attendu puisque la solution est d‘ordre 2 et la
discrétisation de l‘opération d‘ordre 2.
N Erreur à pas variable
32 4.03E-014
64 1.21E-013
128 2.20E-014
256 2.92E-013
Tableau 1. Norme L2 de l’erreur en fonction du maillage
3.2.5 Fichiers de données associés Laplacien_non_homogene.don (les conditions aux limites sont écrites en FORTRAN,
dans la subroutine UTILITAIRES_INI).


25
3.3 Étude du laplacien en coordonnées polaires : ∆𝚿 = 𝟎
3.3.1 Intérêt L‘opérateur laplacien est présent dans de nombreuses équations : équation de l‘énergie,
modèles RANS, équation de transport, projection des vitesses. Nous vérifions ici l‘ordre de
convergence associé à la discrétisation de cet opérateur sur un maillage polaire à pas d‘espace
constant ou variable.
3.3.2 Description Le problème à résoudre, dans un domaine cylindrique Ω tel que 0.1 ≤ r ≤ 0.5 et 90 ≤ ≤180,
est le suivant. :
∆Ψ = 0 𝑠𝑢𝑟 Ω
Ψ =𝑠𝑖𝑛𝜃
𝑟 𝑠𝑢𝑟 𝜕Ω
La solution est Ψ =𝑠𝑖𝑛𝜃
𝑟
3.3.3 Modèles et méthodes numériques
Le laplacien est résolu. Ψ est fixé à 𝑠𝑖𝑛𝜃
𝑟 sur toutes les limites. Des maillages à pas constant et
variable (de type Chebichev) de 162 à 256
2 sont utilisés.
Le système linéaire est inversé avec le solveur direct MUMPS. Ce cas tourne aussi bien en
séquentiel qu‘en parallèle.
3.3.4 Résultats et commentaires Le tableau 1 et la figure 1 donnent les erreurs en fonction du maillage (à pas constant et
variable). L‘erreur est en O(Δx2), conformément au schéma centré utilisé pour discrétiser cet
opérateur.
N Erreur pas Cst
Ordre locale Erreur pas variable Ordre local
16 6.64352E-04 3.13262E-04
32 1.71132E-04 1.96 7.92648E-05 1.98
64 4.31241E-05 1.99 1.98760E-05 2.00
128 1.08028E-05 2.00 4.97258E-06 2.00
256 2.70207E-06 2.00 1.24339E-06 2.00
Tableau 1. Norme L1 de l’erreur en fonction du maillage pour le laplacien
en coordonnées polaires

26
Figure 1. Norme L
1 de l’erreur en fonction du maillage pour le laplacien
en coordonnées polaires
La figure 2 montre le champ Ψ pour un maillage 128x128.
Figure 2. 𝛹 pour un maillage 128x128
3.3.5 Fichiers de données associés Le fichier de données est laplacien_polaire.don.
1,0E-06
1,0E-05
1,0E-04
1,0E-03
10 100 1000
Erre
ur
N
Pas constant
Pas variable

27
3.4 Étude de la conduction avec pénalisation sous maille
3.4.1 Intérêt Le but ici est de valider la méthode de pénalisation sous-maille PSM [1,2] dans un cas de
conduction simple. L‘utilisation d‘interfaces circulaires permet d‘avoir un grand nombre de
configurations différentes d‘intersections entre l‘interface et le maillage.
3.4.2 Description Une condition de Dirichlet est imposée sur deux interfaces circulaires concentriques (cf.
figure 1). On observe la répartition stationnaire de température entre les deux. La validation se
fait par rapport à la solution analytique :
)ln()ln(
)ln()()ln(
)ln()ln()(
12
1
121
12
12
RR
RTTTr
RR
TTrT
avec R1, R2 les rayons des deux cercles et T1, T2 les températures imposées.
La validation se fait avec les paramètres suivants : R1=0.5, R2=2, T1=10, T2=0. Les cercles ne
sont pas tout à fait centrés dans le domaine afin de désymétriser le cas. Le domaine est de
dimension [-1.1 ;1.2]x[-1.1 ;1.2].
Figure 1. Position des cercles et du domaine numérique.
3.4.3 Modèles et méthodes numériques L‘équation de la chaleur (Laplacien homogène) 2D est résolue. La méthode de Pénalisation de
sous-maille PSM est utilisée (dans sa version standard et corrigée) ainsi que les techniques de
projection d‘objets maillés par des surfaces lagrangiennes (Ray-Casting) [1,2]. La correction
améliore les performances du solveur au détriment de la précision en pénalisant à l‘ordre un
sur les points proches de l‘interface. Concernant les objets pénalisés, on utilise ici pour les
cercles des maillages à 5000 éléments afin d‘avoir une précision sur la forme supérieure à
celle de la méthode. Les mots clés OBJET et OBJET_INV sont utilisés pour imposer les
Cercle 1
à T=T1
Cercle 2
à T=T2

28
caractéristiques hétérogènes du milieu considéré. Les maillages sont à pas constant. L‘objet
utilisé est cercle_5000.mxa. Les solveurs directs ou itératifs sont utlisés. Le cas tourne en
séquentiel comme en parallèle.
3.4.4 Résultats et commentaires Le tableau 1 montre une convergence de l‘erreur spatiale relative en norme L² pour la
méthode standard et la méthode corrigée. Comme on peut le voir, la méthode standard est à
l‘ordre 2 ce qui est attendu [1,2], tandis que la méthode corrigée est un peu en dessous. C‘est
la version corrigée qui est implémentée dans Thétis car le gain en temps de calcul avec les
solveurs itératifs compense largement la légère baisse de précision.
Maillage Méthode standard Erreur Méthode corrigée Erreur
8 3.77E-03
3.43E-03
16 6.11E-04 2.63 6.50E-04 2.40
32 1.56E-04 1.97 1.60E-04 2.02
64 3.80E-05 2.03 3.93E-05 2.03
128 9.07E-06 2.07 1.17E-05 1.75
256 2.16E-06 2.07 3.34E-06 1.81
512 6.13E-07 1.82 1.25E-06 1.42
Tableau 1. Erreur en fonction du maillage.
Le tracé des iso-valeurs de température permet d‘observer des cercles concentriques (cf.
figure 2) alors que les formes étudiées ne sont pas conformes aux directions du maillage
cartésien. On remarquera la présence d‘overshoots à l‘intérieur du petit cercle. Ce défaut
attendu est inhérent à la méthode. Il ne pose généralement pas de problème dans la mesure où
il apparaît toujours dans les objets pénalisé, c'est-à-dire dans une zone où on ne cherche pas la
solution. On devra toutefois faire attention à ne pas considérer l‘intérieur des objets pénalisés
pour des calculs d‘erreurs ou de moyennes.
Figure 2. Tracé de la solution pour un maillage 32x32.

29
3.4.5 Fichiers de données associés Le fichier est conduction2d_psm.don.
3.4.6 Références [1] A. Sarthou, S. Vincent, P. Angot, JP. Caltagirone, The Sub-Mesh Penalty Method,
Proceedings of FVCA5 (2008) 633—640
[2] A. Sarthou. Thèse de l‘université Bordeaux 1, 2009.


31
3.5 Conduction stationnaire dans un bicouche
3.5.1 Intérêt
Il s‘agit de valider le code dans le cas de la conduction thermique dans une plaque constituée
de deux couches en série de conductivité thermiques différentes, en régime stationnaire. Il
existe dans le code 2 approches pour simuler ces cas :
1. Méthode d‘interpolation (standard) : il s‘agit d‘interpoler les conductivités
thermiques situées sur la grille de vitesse au voisinage de l‘interface entre les deux
milieux. Dans le cadre de ce cas de validation, nous nous intéresserons à une
interpolation de type harmonique.
2. Méthode des interfaces immergées : cette méthode consiste à imposer une
condition de continuité de flux de chaleur à l‘interface entre les deux milieux, à
l‘échelle sous-maille.
Cette fiche a pour but de comparer ces deux approches sur des maillages différents, et
notamment des comparaisons entre maillage pair/impair, pour lesquels on a pu constater des
différences importantes entre les solutions numériques.
3.5.2 Description
La figure 1 représente schématiquement le domaine de simulation. Nous considérons une
plaque plane de longueur L = 10 cm constituée de deux milieux de conductivités différentes :
1 401 W.m-1.K-1 et 2 0.5 W.m-1.K-1.
Des conditions d‘adiabaticité sont imposées sur les parois supérieures et inférieures. Nous
fixons une température T1 = 1273,15K sur la limite gauche et une température T2 = 273,15K
sur la limite droite.
Compte tenu des conditions imposées, il s‘agit d‘un cas de conduction 1D dans la direction X1
en régime permanent. Nous pourrons donc confronter les résultats numériques à une solution
analytique.
Figure1 : illustration de la géométrie prise en compte pour la simulation
Dans la mesure où nous sommes dans un cas de conduction sans source de chaleur, la solution
analytique est linéaire par morceaux.

32
2 milieu le dans
1 milieu le dans
222
111
)(
)(
bxaxT
bxaxT
)()(21
2
2
1
1
xTxT
x
T
x
T
Avec :
11
2
1
2
1
222
1
2
int
12
2
1
Tb
aa
LaTb
Lx
TTa
3.5.3 Modèles et méthodes numériques
L‘équation de l‘énergie est résolue en séquentiel avec un solveur BICG et un résidu fixé à
10-16
. Dans le cas de la méthode des interfaces immergées, un préconditionneur de type ILUK
a été utilisé.
Une attention particulière sera portée sur l’ordre d’imposition des limites dans le fichier de
données, en écrivant en dernier les conditions de Dirichlet de telle manière que cette condition
soit appliquée aux coins du domaine.
LIMITE TEMPERATURE SUP ADIABATIQUE
LIMITE TEMPERATURE INF ADIABATIQUE
LIMITE GAUCHE CONSTANTE 1273.15D0
LIMITE DROITE CONSTANTE 273.15D0
Le choix d‘un nombre de maille limité dans la direction X2 se voit justifié dans la mesure où
la conduction se fait uniquement selon X1.
Positionnement de l‘Objet : les propriétés du milieu 1 sont définies à l‘aide d‘un objet (fichier
.mxa). En raison de transformations effectuées sur l‘objet telles des homothéties et/ou des
translations selon les directions X1 et X2 de l‘espace, l‘interface entre le milieu 1 et le milieu 2
se voit être décalée d‘un de l‘ordre de 10-8
m, soit 2
int
Lx . Ce décalage est pris en
compte lors du calcul de la solution analytique ( intx étant la position de l‘interface de
l‘objet).
à l’interface, soit en 2
int
Lxx

33
Dans cet exercice de validation, nous éviterons les configurations particulières où l‘interface
se superpose aux nœuds de la grille de vitesse ou de pression.
3.5.4 Résultats
La solution analytique étant connue, les erreurs relatives seront calculées avec la norme L²
pour 8 maillages différents et pour les approches suivantes :
- standard (Interpolation harmonique)
- interface immergée
Une étude de convergence spatiale est réalisée dans le cas de l‘utilisation de maillages pairs et
de la méthode standard. Les résultats de simulations sont présentés dans les tableaux 1, 2.
Le tableau 2 fait apparaitre que la précision des solutions numériques données par la méthode
standard est dépendante du caractère pair ou impair du maillage (présence ou non d‘un nœud
de vitesse à l‘interface entre les 2 milieux), contrairement à celle donnée des interfaces
immergées (cf. tableau 1).
Maillage Erreur relative (L²)
64 x 5 8,91.10-15
128 x 5 2,93 .10-14
256 x 5 1,12 .10-13
512 x 5 1,18 .10-13
65 x 5 2,34 .10-14
129 x 5 5,51 .10-14
257 x 5 2,99 .10-13
513 x 5 6,46 .10-13
Tableau 1 : Evolution de l’erreur relative en fonction du maillage, méthode des interfaces
immergées
Maillage Erreur relative (L²)
64 x 5 5,83.10-3
128 x 5 2,93.10-3
256 x 5 1,47 .10-3
512 x 5 7,38 .10-4
65 x 5 7,53 .10-8
129 x 5 7,55 .10-8
257 x 5 7,56.10-8
513 x 5 7,57 .10-8
Tableau 2 : Evolution de l’erreur relative en fonction du maillage, méthode d’interpolation
standard
Maillage Erreur relative (L²) Ordre local de

34
convergence
64 x 5 5,83.10-3
128 x 5 2,93.10-3 0,9899
256 x 5 1,47 .10-3 0,9950
512 x 5 7,38 .10-4 0,9976
Tableau 3 : Evolution de l’ordre local de convergence, méthode d’interpolation standard
Une étude de convergence spatiale a été réalisée dans le cas des maillages pairs. Le tableau 3
donne l‘ordre de convergence locale en fonction du maillage. L‘ordre obtenu, de 1, est du à la
convergence au même ordre de la position géométrique de l‘interface entre les 2 milieux vers
la position exacte.
Pour la méthode des frontières immergées, la solution analytique est captée à une précision
proche de la précision machine près, quelque soit le maillage. L‘ordre de convergence obtenu
ici est donc infini puisqu‘on obtient la solution analytique quelque soit le maillage considéré.
La méthode des interfaces immergées semblent donc être une bonne alternative aux
problèmes de dépendance au maillage rencontrés dans les cas de l‘approche standard
(interpolation harmonique des conductivités thermiques au voisinage de l‘interface). Des cas
tests concernant les échanges de chaleur en convection forcée (couplage fluide/thermique)
sont actuellement en cours de validation).
3.5.5 Dichier de donnée
Le fichier de données associé est conduction1d.don.

35
3.6 Écoulement de Couette en coordonnées polaires et cylindriques
3.6.1 Intérêt L‘objectif de ce cas test est de vérifier la convergence du code en coordonnées polaires et
cylindriques sur le problème de Couette entre 2 cylindres coaxiaux : une vitesse de rotation en
bloc est fixée sur le noyau interne (en r=rmin) alors que la paroi externe (en r=rmax) est
maintenue à vitesse nulle. Nous vérifions aussi que les solutions obtenues avec les deux
systèmes de coordonnées sont bien identiques
3.6.2 Description La vitesse est suffisamment faible pour que le régime soit laminaire et stationnaire. La
solution est alors indépendante de la vitesse de rotation à un facteur près, la vitesse
circonférentielle sur le cylindre central. Le cas choisi correspond à un rayon interne de 0.02,
un rayon externe de 0.1 et une vitesse de rotation égal à 𝜔 = 0.5𝑟𝑑. 𝑠−1. La vitesse
circonférentielle sur le cylindre interne est alors de 0.01 m.s-1
.
La résolution des équations de Navier-Stokes dans le cadre des hypothèses retenues fournit la
solution suivante pour la composante tangentielle de la vitesse et la pression [1] :
( )2
a bv r r
r
2 2
2
2( ) ( )
8 2
a bp r r a b ln r
r
avec 2 2
2 2 1 1
2 2
2 1
2r r
ar r
2 2
1 2
1 2 2 2
2 1
r rb
r r
où 1 et 2
sont les vitesses de rotation des cylindres interne et externe.
3.6.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues par la méthode du lagrangien augmenté ou par
une méthode de correction de pression. En coordonnées polaires, les conditions aux
limites sont :
θ=θmin et θ=θmax : périodique
r=rmin : glissement uθ=0.01 m.s-1
et ur=0 m.s-1
.
r=rmax : adhérence
Les conditions initiales pour la vitesse et la pression sont nulles.
Seul le maillage suivant le rayon est important, le maillage suivant l‘angle polaire n‘induit
aucun effet puisque la solution est indépendante de celui-ci (nous choisirons 16 mailles dans
cette direction). Le nombre de mailles N suivant r varie de 16 à 512, à pas constant.

36
Le fluide utilisé est de l‘air.
3.6.4 Résultats et commentaires
En coordonnées polaires.
Le tableau 1 fournit la norme L1 de l‘erreur sur la vitesse par rapport à la solution théorique
ainsi que les ordres de convergence. Les résultats sont identiques que le couplage
vitesse/pression soit résolu par la méthode du lagrangien augmenté ou par la méthode de
correction de pression. L‘approximation spatiale est en 2
( )O x c‘est à dire la précision du
schéma de base. La figure 1 montre l‘évolution de l‘erreur en fonction du nombre de degrés
de liberté de l‘approximation spatiale.
Ce cas test permet de valider partiellement le système de coordonnées polaires ou
cylindriques, car les effets d‘inertie sont présents dans un seul terme de la première
composante de l‘équation du mouvement et n‘influe que sur le gradient de pression radial égal
à V r
. Les effets visqueux ne sont gouvernés que par le terme V
, la composante sur
du laplacien de la vitesse.
N Erreur (pas Cst) Ordre local
16 6.534690E-06
32 1.739990E-06 1.91
64 4.455410E-07 1.97
128 1.124960E-07 1.99
256 2.824900E-08 1.99
512 7.076980E-09 2.00
Tableau 1. Écoulement de Couette en polaire, convergence en maillage

37
Figure 1. Écoulement de Couette en polaire pour min5
maxR r r ; convergence en maillage
En coordonnées cylindriques.
En coordonnées cylindriques, si des conditions aux limites de symétrie sont choisies sur les
limites x=xmin et x=xmax, à maillage identique dans la direction radiale, les solutions doivent
être identiques à celles trouvées en coordonnées polaires. Quelques calculs menés sur les
premiers maillages ont montré des différences avec les maillages polaires inférieures à 10-10
avec la méthode du lagrangien augmenté et de l‘ordre de la précision machine avec la
méthode de correction de pression.
3.6.5 Fichiers de données associés En polaire : couette_polaire_la.don, couette_polaire_cpre.don
En cylindrique : couette_cylindrique_la.don et couette_cylindrique_cpre.don.
3.6.6 Références [1] Chassaing - Patrick, Mécanique des fluides, Collection Polytech, Cépaduès-Editions,
450 p., 2000.
1,0E-09
1,0E-08
1,0E-07
1,0E-06
1,0E-05
10 100 1000
Erre
ur
N


39
3.7 Écoulement de Poiseuille plan
3.7.1 Intérêt
L‘écoulement laminaire incompressible stationnaire d‘un fluide visqueux dans un canal plan
sous l‘influence d‘un gradient de pression constant, décrit par les équations de Navier-Stokes,
présente une solution d‘ordre 2 en espace. L‘utilisation de schémas de discrétisation d‘ordre 2
en espace devrait permettre de représenter exactement le comportement quadratique de la
solution de Poiseuille.
3.7.2 Description
Le domaine est rectangulaire, le gradient de pression est constant et orienté selon l'axe x
horizontal. Les plaques sont situées en z=e et z=-e, où e est la demi-épaisseur du canal plan.
La vitesse est parallèle aux plaques. La solution des équations de Navier-Stokes pour ce
problème est :
2
0 2
3( ) 1
2
zu z V
e
0
2
3( )
stVp x x C
e
où 0V est la vitesse de débit et la viscosité dynamique du fluide.
Le nombre de Reynolds est égal à 100 mais la solution ci-dessus reste valable tant que le
nombre de Reynolds est inférieur à 2300.
3.7.3 Modèles et méthodes numériques
Les équations de Navier-Stokes sont résolues par la méthode du lagrangien augmenté
(complétée ou non par une étape de projection vectorielle) ou par la méthode de correction de
pression. Les conditions aux limites sont :
Gauche : profil parabolique ci-dessus
Droite : condition de Neumann pour u et v
Inférieure et supérieure : adhérence (u,v)=(0,0)
Les conditions initiales pour la vitesse et la pression sont nulles. Les maillages utilisés varient
de 22 à 1024
2, maillages réguliers ou non. Le solveur direct MUMPS est utilisé en 2D, le
BiCGStab(2) en 3D. Ce cas tourne aussi bien en parallèle qu‘en séquentiel.
3.7.4 Résultats et commentaires
L‘erreur par rapport à la solution analytique, pour toutes les configurations, est inférieure à
10-12
.
Ce cas test élémentaire n‘est pas très discriminant pour valider un code car les composantes
de la vitesse transversales sont nulles et la pression linéaire. Les termes d‘inertie et une grande
partie des termes visqueux qui posent généralement des problèmes sont aussi nuls. Il est ainsi

40
possible de résoudre ce problème en désactivant la discrétisation du terme d‘inertie des
équations de Navier-Stokes (INERTIE NON). Les calculs menés sur cette configuration
permettent toutefois de vérifier à la précision machine près que des erreurs de discrétisation
dans le domaine ou aux limites ne subsistent pas. De même, la permutation de la condition
d‘entrée sur les 4 limites en 2D ou les 6 en 3D permet de détecter rapidement d‘éventuels
problèmes de symétrie.
Le problème peut aussi être traité avec une condition de symétrie sur les limites inférieure ou
supérieure, ou bien avec des conditions de périodicité (cf. fichier poiseuille2dper_la.don et
poiseuille2dper_cpre.don) sur les limites gauche et droite en imposant le gradient longitudinal
de pression théorique égal à 0.0555 Pa.m-1
dans le domaine. La pression est alors
identiquement nulle dans tout le domaine.
Le cas peut-être traité en 3D (cf. fichiers poiseuille3d.don ou poiseuille3dper.don) en
choisissant des conditions de symétrie sur les limites avant et arrière.
Ce cas a aussi servi à la validation du couplage entre Thétis et des mailleurs externes (Gambit
et Poinwise). Le fichier poiseuille2d_la_gb.don traite ce cas à partir d‘un maillage monobloc
généré par Gambit. Le fichier poiseuille2d_la_gbncf.don traite ce cas à partir de maillages
Gambit multiblocs non-conformes : 5 maillages (cf. figure suivante) ont été réalisés et
conduisent à une erreur par rapport à la solution analytique inférieure à 10-13
. Le fichier
poiseuille3d_la_pw.don lit un maillage issu de Pointwise. L‘ensemble des simulations sur des
maillages non-conformes est réalisé à l‘aide de la projection scalaire pour la résolution du
couplage vitesse/pression.
Remarque
Si l‘on impose un profil plat de vitesse en entrée, il faut noter un ordre de convergence
spatiale de 1 en raison de la convergence du débit d‘entrée à l‘ordre 1 vers le débit théorique.
Figure 1 : exemples de maillages non-conformes pour l’écoulement de Poiseuille
3.7.5 Fichiers de données associés
Avec la méthode du lagrangien augmenté : poiseuille2d_la.don, poiseuille2dper_la.don,
poiseuille3d_la.don, poiseuille3d_per_la.don, poiseuille2d_la_gb.don,
poiseuille3d_la_pw.don
Avec la méthode de correction de pression : poiseuille2d_cpre.don,
poiseuille2dper_cpre.don, poiseuille2d_cpre_gbncf.don.

41
3.8 Écoulement de Poiseuille plan instationnaire
3.8.1 Intérêt Afin d‘évaluer la précision temporelle du code, il est possible de s‘intéresser à la phase
transitoire de l‘écoulement de Poiseuille plan : le fluide contenu dans le canal plan
initialement au repos est mis en mouvement sous l‘action d‘un gradient de pression maintenu
constant entre l‘entrée et la sortie du canal.
3.8.2 Description Le domaine est rectangulaire, le gradient de pression est constant et orienté selon l'axe x
horizontal. Les plaques sont situées en z=e et z=-e, où e est la demi-épaisseur du canal plan.
La vitesse est parallèle aux plaques. La solution théorique transitoire des équations de Navier-
Stokes s‘écrit :
2 2 2 2
2 2 2
0
(2 1)( ) 1 (0) (2 1)
4 2n
n
ke z n zu z t a exp t cos n
e e e e
2
3 3
16 ( 1)(0)
(2 1)
n
n
k ea
n
Lorsque le temps devient grand la solution converge vers la loi parabolique (cf. fiche sur
l‘écoulement de Poiseuille plan).
3.8.3 Modèles et méthodes numériques Le nombre de Reynolds est pris égal à 100. Les équations de Navier-Stokes sont résolues par
la méthode du lagrangien augmenté ou par la méthode de correction de pression. Un gradient
de pression axial de 0.0555 Pa.m-1
est imposé dans tout le domaine. Les conditions aux
limites sont :
Gauche et droite : condition de périodicité
Inférieure et supérieure : adhérence (u,v)=(0,0)
Les conditions initiales pour la vitesse et la pression sont nulles. Les maillages utilisés,
réguliers, sont constants dans la direction X1 (16 mailles) et varient de 16 à 512 dans la
direction X2. Le solveur direct MUMPS est utilisé. Ce cas tourne aussi bien en parallèle qu‘en
séquentiel.
3.8.4 Résultats et commentaires La figure 1 donne à titre d‘exemple l‘évolution de la vitesse axiale en fonction de la hauteur et
du temps (entre 1s et 10s). La solution stationnaire n‘est pas encore tout à fait atteinte à t=10s.

42
Figure 1. Évolution au cours du temps du profil de la composante axiale
du vecteur vitesse
Le tableau 1 donne le résidu en norme L1 entre solution théorique et simulation numérique au
temps t=1s. Les résultats du tableau 1 ou de la figure 3 montrent une décroissance de l‘erreur
lorsque le pas de temps diminue. L‘ordre de convergence est calculé sur les 2 derniers pas de
temps. Pour une approximation spatiale fixée on constate toutefois une stagnation de l‘erreur
lorsque le pas de temps diminue (cf. figure 2). Cette saturation est due au fait que celle-ci
dépend à la fois du pas de temps et du pas d‘espace sous la forme :
2
t t x x
Δt N = 16 N = 32 N = 64 N = 128 N = 256
0.1 0.29600E-02 0.29961E-02 0.30285E-02 0.30485E-02 3,0595E-03
0.01 0.37431E-03 0.32390E-03 0.31308E-03 0.31152E-03 3.1173E-04
0.001 0.11063E-03 0.51404E-04 0.36183E-04 0.32422E-04 3.1533E-05
0.0001 0.84214E-04 0.24101E-04 0.84392E-05 0.44576E-05 3,4588E-06
ordre 0.12 0.33 0.63 0.86 0.96
Tableau 1. Écoulement de Poiseuille instationnaire, convergence en temps
0.0E+00
2.0E-02
4.0E-02
6.0E-02
8.0E-02
1.0E-01
1.2E-01
1.4E-01
1.6E-01
0.0E+00 5.0E-03 1.0E-02 1.5E-02 2.0E-02
u(m
.s-1
)
Z(m)
t=1st=2st=3st=4st=5st=6st=7st=8st=9st=10s

43
Figure 2. Écoulement de Poiseuille, convergence en temps, saturation de la convergence par
la discrétisation spatiale
La figure 3 montre la convergence spatiale pour un pas de temps 410t
. On constate aussi
une saturation de l‘erreur due au pas de temps lorsque l‘approximation spatiale est grande.
Figure 3. Écoulement de Poiseuille, convergence en espace pour 4
10t
, saturation de la
convergence par la discrétisation temporelle
Pour l‘ensemble des simulations, la pression ainsi que la vitesse verticale sont nulles dans tout
le domaine (à la précision machine près) conformément à la théorie. Les résultats sont
identiques pour les 2 méthodes de résolution du couplage vitesse/pression.
En conclusion, lorsque l‘approximation spatiale est suffisamment grande, on enregistre une
convergence en temps en ( )O t c‘est à dire la précision théorique du schéma d‘Euler d‘ordre
un.
1,00E-06
1,00E-05
1,00E-04
1,00E-03
1,00E-02
0,00001 0,0001 0,001 0,01 0,1 1
Erre
ur
Pas de temps
N=16
N=32
N=64
N=128
N=256
1,00E-06
1,00E-05
1,00E-04
10 100 1000
Err
eu
r
N

44
3.8.5 Fichiers de données associés poiseuille2dinst_la.don (lagrangien augmenté)
poiseuille2dinst_cpre.don (méthode de correction de pression).

45
3.9 Écoulement de Poiseuille plan à viscosité variable
3.9.1 Intérêt Dans de nombreux écoulements, la viscosité est variable dans l‘espace. C‘est le cas par
exemple des écoulements turbulents, pour lesquels la viscosité turbulente t
peut prendre des
valeurs très différentes ou pour des rhéologies non-newtoniennes. Il est donc essentiel de
vérifier que la discrétisation de la divergence du tenseur des contraintes visqueuses ne
présente pas de défaut dans le domaine ou aux limites.
3.9.2 Description Le domaine est rectangulaire, le gradient de pression est constant et orienté selon l'axe x
horizontal. Les plaques sont situées en z=e et z=-e, où e est la demi-épaisseur du canal plan.
La vitesse est parallèle aux plaques. La loi de variation de la viscosité suivante a été choisie :
2
2
0 2
zexp a
e
avec 5
02 0 01 1 85 10a e
Pa.s
La figure 1 représente les variations de cette loi avec la coordonnée verticale :
Figure 1. Écoulement de Poiseuille à viscosité variable, profil de viscosité
La solution des équations de Navier-Stokes dans les hypothèses citées plus haut s‘écrit :
2
2 2
2
2 2
0
( ) 1 12
ak e e z
u z t exp aa e
avec 0 25k
0
0.0002
0.0004
0.0006
0.0008
0.001
0.0012
0 0.005 0.01 0.015 0.02
Vis
cosi
té (P
a.s)
Z

46
3.9.3 Modèles et méthodes numériques Le nombre de Reynolds est pris égal à 100. Les équations de Navier-Stokes sont résolues par
la méthode du lagrangien augmenté ou de la projection scalaire. Un gradient de pression axial
de 0.294207317 Pa.m-1
est imposé. Les conditions aux limites sont :
Gauche et droite : condition de Neumann pour u et v
Inférieure et supérieure : adhérence (u,v)=(0,0)
Les conditions initiales pour la vitesse et la pression sont nulles. Les maillages utilisés,
réguliers, varient de 16 à 512 dans la direction z et sont constants dans la direction x (solution
indépendant de cette direction). Le solveur direct MUMPS est utilisé. Ce cas tourne aussi bien
en parallèle qu‘en séquentiel.
3.9.4 Résultats et commentaires La figure 2 représente l‘évolution de la vitesse axiale en fonction de z. Compte tenu des
valeurs importantes de la viscosité le long des parois la distribution de la vitesse est
sensiblement différente d‘une parabole.
Figure 2. Écoulement de Poiseuille à viscosité variable, Thétis (courbe), solution théorique
(points)
Même pour des approximations spatiales limitées, la différence entre les solutions théoriques
et numériques n‘est pas perceptible sur un graphe. Le tableau 1 donne l‘erreur entre solution
théorique et simulation numérique ainsi que l‘ordre de convergence ce qui permet d‘apprécier
plus facilement les écarts.
N Erreur Ordre local
16 0.3678E-03
3 2 0.9513E-04 1.95
0.0E+00
2.0E-02
4.0E-02
6.0E-02
8.0E-02
1.0E-01
1.2E-01
1.4E-01
1.6E-01
1.8E-01
2.0E-01
0.0E+00 5.0E-03 1.0E-02 1.5E-02 2.0E-02
Vit
esse
axi
ales
e (m
.s-1
)
Z(m)

47
64 0.2411E-04 1.98
1 2 8 0.6068E-05 1.99
256 0.1523E-05 1.99
512 0.3815E-06 2.00
Tableau 1. Poiseuille à viscosité variable, convergence en maillage
La convergence calculée à partir de la méthode d‘extrapolation de Richardson est en 2( )O x .
La figure 3 reproduit l‘évolution du résidu en fonction de l‘approximation spatiale sur un
diagramme logarithmique.
Figure 3. Écoulement de Poiseuille à viscosité variable, convergence en espace
3.9.5 Fichiers de données associés poiseuille2dmuvar_la.don (lagrangien augmenté)
poiseuille2dmuvar_cpre.don (correction de pression)
1,00E-07
1,00E-06
1,00E-05
1,00E-04
1,00E-03
10 100 1000
Erre
ur
N


49
3.10 Écoulement de Poiseuille en coordonnées cylindriques et
axisymétriques
3.10.1 Intérêt L‘écoulement de Poiseuille entre 2 tubes cylindriques de section circulaire peut être calculé à
partir d‘une simulation 3D dans un système de coordonnées cylindriques ou bien avec un
système de coordonnées orthogonales axisymétriques ( )r . Les deux cas sont ici testés dans
le cas ou le rayon du cylindre intérieur R1 est non nul. Nous observons l‘erreur par rapport à la
solution exacte et vérifions que les solutions obtenues avec les deux systèmes de coordonnées
sont bien identiques. Les équations de Navier-Stokes ne sont ici que partiellement validées
pour ces systèmes de coordonnées puisque la solution est uniquement fonction de r.
3.10.2 Description La solution des équations de Navier-Stokes pour ce problème est la suivante :
2 2 2 2 2
2 2 1
2 1
( )( ) ( ) ( )
( )
Log r Ru r r R R R
Log R R
avec
0 2 1
2 2 2 2 2 4 2
2 1 2 1 2 2 1 1 2
2 ( )
( ) ( ) 4 ( ) 1 4 ( ) 1
V Log R R
R R Log R R R Log R R Log R R
3.10.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues dans les 2 systèmes de coordonnées
cylindriques et axisymétriques. La solution exacte est imposée en entrée du domaine, et une
condition de Neumann en sortie. L‘adhérence est imposée sur les parois du cylindre. En 3D,
les conditions sur les limites θ=Cst sont des conditions de symétrie.
Le couplage vitesse/pression est résolu par la méthode du lagrangien augmenté ou par une
méthode de correction de pression. Le solveur MUMPS est utilisé en 2D. Le BiCGStab(2) est
utilisé en 3D. Les maillages, dans la direction r, varient de 16 à 128.
3.10.4 Résultats et commentaires
Le tableau 1 donne le résidu en norme 2
L entre solution théorique et simulation numérique.
Les résultats sont identiques à 10-14
près pour les deux systèmes de coordonnées et quelle que
soit la méthode de résolution du couplage vitesse pression (à l‘exception du cas cylindrique
avec la méthode de correction de pression ou les résultats sont identiques à 10-9
près).
N Erreur Ordre local
16 0.59589E-06
32 0.14911E-06 2.00
64 0.37433E-07 1.99
128 0.93610E-08 2.00
Tableau 1. Écoulement de Poiseuille dans un tube, convergence en maillage

50
3.10.5 Fichiers de données associés poiseuille2daxi_la.don, poiseuille2daxi_cpre.don
poiseuille3dcyl_la.don et poiseuille3dcyl_cpre.don.

51
3.11 Écoulement Radial
3.11.1 Intérêt L‘objectif est de vérifier la qualité de la solution numérique du code en coordonnées polaires
dans le cas où l‘écoulement est radial. L‘écoulement est celui d‘un fluide entre 2 cylindres
coaxiaux de rayon R1 et R2, avec R1<R2. La vitesse radiale 0
W est maintenue sur le cercle
intérieur alors que la paroi externe est supposée libre. La solution sur la vitesse radiale est
entièrement obtenue par l‘équation de conservation de la masse alors que la pression est
calculée à partir de l‘équation de Navier-Stokes ou bien par la loi de Bernouilli. En effet, les
effets visqueux sont nuls pour ce problème, c‘est un écoulement de fluide parfait. Comme la
vitesse diminue lorsque le rayon augmente, la pression augmente vers l‘extérieur. Cet
exemple permet de vérifier aussi la consistance de la discrétisation des conditions aux limites
curvilignes. La résolution des équations de Navier-Stokes avec tous les termes permet de
vérifier la disparition des effets des termes visqueux sur la solution. Seuls les effets d‘inertie
sont présents et peuvent être validés indépendamment. La solution stationnaire est recherchée
pour cet exemple.
3.11.2 Description La conservation de la masse pour un écoulement incompressible permet de calculer
l‘évolution de la vitesse radiale en fonction du rayon.
1
0( )
Rw r W
r
2 2 2
0 1 2
0 2 2
2
( ) 12
V R Rp r p
R r
La vitesse tangentielle est nulle.
3.11.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues par la méthode du lagrangien augmenté ou par
la méthode de correction de pression. En coordonnées polaires, les conditions aux limites
sont :
θ= θmin et θ= θmax : périodique
r=rmin : ur=0.01 m.s-1
et uθ=0 m.s-1
r=rmax : Neumann
Les conditions initiales pour la vitesse et la pression sont nulles. Seul le maillage suivant le
rayon est important, le maillage suivant l‘angle polaire n‘induit aucun effet puisque la
solution est indépendante de celui-ci (nous choisirons 16 mailles dans cette direction). Le
nombre de mailles N suivant r varie de 16 à 512, à pas constant. Le solveur MUMPS est
utilisé. Ce cas tourne en séquentiel et en parallèle. Le fluide utilisé est de l‘air.
3.11.4 Résultats et commentaires Le tableau 1 donne le résidu en norme L
1 entre solution théorique et simulation numérique
pour la pression et la vitesse ainsi que les ordres de convergence. Les résultats sont identiques
avec les 2 méthodes de résolution du couplage vitesse/pression. La résolution de l‘équation de

52
Navier-Stokes en schéma centré permet de trouver la précision à l‘ordre deux. L‘évolution du
résidu est représentée sur la figure 1 pour des approximations spatiales dans la direction
radiale comprises entre N=16 et N=1024.
N ε vitesse Ordre local ε pression Ordre local
16 0.1890E-04 2.05 0.3603E-05 2.09
32 0.4650E-05 2.02 0.8718E-06 2.05
64 0.1153E-05 2.01 0.2144E-06 2.02
128 0.2872E-06 2.01 0.5317E-07 2.01
256 0.7167E-07 2.00 0.1324E-07 2.01
512 0.1790E-07 2.00 0.3295E-08 2.01
1024 0.4473E-08 2.00 0.8436E-09 1.97
Tableau 1. Écoulement radial, convergence en maillage (schéma centré)
Figure 1. Écoulement radial; convergence en maillage pour la vitesse et la pression
Le tableau 2 donne le résidu en norme L1 pour la pression entre solution théorique et
simulation numérique si le schéma upwind est utilisé pour le terme d‘inertie (avec la méthode
du lagrangien augmenté). On retrouve un ordre de convergence de 1, calculé sur les 3 derniers
maillages, conforme à la théorie. Par contre, l‘utilisation d‘un schéma hybride ou upwind ne
modifie pas le résultat sur la convergence de la vitesse. Ce résultat est dû au fait que la
solution sur la vitesse est obtenue à l‘aide de l‘équation de la conservation de la masse. Il en
est de même si le schéma Quick est utilisé. Il faut simplement se rappeler que la conservation
de la masse est assurée implicitement par la technique du lagrangien augmenté exprimé dans
une version centrée.
1.00E-10
1.00E-09
1.00E-08
1.00E-07
1.00E-06
1.00E-05
1.00E-04
10 100 1000
ε
N
Vitesse
Pression

53
N upwind Ordre local
16 0.6790E-04 1.07
32 0.3225E-04 1.04
64 0.1572E-04 1.02
128 0.7760E-05 1.01
256 0.3855E-05 1.00
512 0.1922E-05 1.00
1024 0.9592E-06 1.07
Tableau 2. Écoulement radial, convergence en maillage pour un schéma upwind
L‘évolution du résidu est représentée sur la figure 2 pour des approximations spatiales dans la
direction radiale comprises entre N=16 et N=1024.
Figure 2. Écoulement radial; convergence en maillage pour la pression avec les schémas
upwind et centré
3.11.5 Fichiers de données associés radial_la.don.
radial_cpre.don
1,0E-10
1,0E-09
1,0E-08
1,0E-07
1,0E-06
1,0E-05
1,0E-04
10 100 1000
Titr
e d
e l'a
xe
N
Upwind
Centré


55
3.12 Écoulement dans un canal 3D
3.12.1 Intérêt L‘écoulement laminaire incompressible stationnaire d‘un fluide visqueux dans un canal plan
3D sous l‘influence d‘un gradient de pression constant, décrit par les équations de Navier-
Stokes, présente une solution qui n‘est plus parabolique comme dans le cas de l‘écoulement
de Poiseuille. Néanmoins, la comparaison de la solution par rapport à la solution exacte des
équations de Navier-Stokes dans ce cas permet de vérifier en partie la discrétisation des
équations.
3.12.2 Description Le domaine est rectangulaire, le gradient de pression est constant et orienté selon l'axe x
horizontal. Les plaques sont situées en z=e et z=-e, où e est la demi-épaisseur du canal plan.
La vitesse est parallèle aux plaques. La solution des équations de Navier-Stokes pour ce
problème est 𝑢𝑝𝑜𝑖𝑠 𝑦, 𝑧 =𝑈𝑝𝑜𝑖𝑠 (𝑦 ,𝑧)
𝑈𝑚𝑜𝑦 donnée dans [1] par :
𝑈𝑝𝑜𝑖𝑠 𝑦 ,𝑧
𝑈0 = 6𝑧 1 − 𝑧 +
48
𝜋3
(−1)𝑛+1𝑒𝑥𝑝 𝑁𝜋 𝑦 − 𝐵 1 + 𝑒𝑥𝑝 −2𝑁𝜋 𝑦 −𝐵2 𝑐𝑜𝑠 𝑁𝜋 𝑧 −
12
𝑁3 1 + 𝑒𝑥𝑝 −2𝑁𝜋𝐵
∞
𝑛=0
avec 𝑁 = 2𝑛 + 1, 𝑈0 = −𝐻2
12𝜇
𝜕𝑝
𝜕𝑥 la vitesse moyenne de l‘écoulement de poiseuille 2D
et avec Umoy la vitesse moyenne de l‘écoulement donnée par :
𝑈𝑚𝑜𝑦
𝑈0= 1 +
192
𝜋5
(−1)𝑛𝑠𝑖𝑛 2n + 1 πB2) 𝑠𝑖𝑛 (2n + 1)
π2
(2𝑛 + 1)5𝐵𝑐𝑜𝑠 2𝑛 + 1 𝜋𝐵2
∞
𝑛=0
3.12.3 Modèles et méthodes numériques Le nombre de Reynolds est égal à 100. Les équations de Navier-Stokes sont résolues par la
méthode du lagrangien augmenté ou par la méthode de correction de pression. Les conditions
aux limites sont :
Gauche/Droite : périodique
Inf, sup, avant et arrière : adhérence (u,v,w)=(0,0,0)
L‘écoulement est généré par un terme source longitudinal de 0.186231521215612 Pa.m-1
. Les
conditions initiales pour la vitesse et la pression sont nulles. Les maillages utilisés varient de
8x8x8 à 8x64x64 (par un facteur de 2 dans les directions y et z), maillages réguliers ou non.
Ce cas tourne aussi bien en parallèle qu‘en séquentiel.

56
3.12.4 Résultats et commentaires Le tableau 1 et la figure 1 donnent l‘erreur sur la composante horizontale du vecteur vitesse
en norme L1 ainsi que les ordres de convergence. Ces derniers confirment une convergence en
(x2). Les intensités des autres composantes du vecteur vitesse sont proches de la précision
machine.
N Erreur Ordre local
8 7.22942E-06
16 1.63411E-06 2.15
32 4.17250E-07 1.97
64 1.04668E-07 2.00
Tableau 1 : norme L1 de l’erreur en fonction du maillage
Figure 1. Norme L
1 de l’erreur en fonction du maillage
3.12.5 Fichiers de données associés canal3d_la.don (avec la méthode du lagrangien augmenté)
canal3d_cpre.don (avec la méthode de correction de pression)
3.12.6 Références [1] A. Benzaoui, X. Nicolas and S. Xin, Efficient vectorized finite difference method to solve
the incompressible Navier-Stokes equations for the 3D mixed convection flows in high aspect
ratio channels, Num. Heat Trans. B, 48, 277-302, 2005
1.00E-07
1.00E-06
1.00E-05
1 10 100
Err
eu
r
N

57
3.13 Changement d’état liquide/solide franc : fusion totale
3.13.1 Intérêt L‘objectif de ce cas test est de s‘assurer que lors du changement d‘état, l‘énergie globale est
conservée, et donc que la fraction solide est correctement calculée (cohérente avec la
température). Nous vérifions aussi que l‘algorithme de changement d‘état de Voller [1] est
d‘ordre 1 en temps.
Soient Tf la température de changement d‘état et fs la fraction solide. Dans le modèle de
changement d‘état franc, la contrainte suivante doit être respectée :
𝑓𝑠 = 0 𝑠𝑖 𝑇 > 𝑇𝑓
𝑓𝑠 = 1 𝑠𝑖 𝑇 < 𝑇𝑓
0 < 𝑓𝑠 < 1 𝑠𝑖 𝑇 = 𝑇𝑓
3.13.2 Description On considère un domaine carré de coté L=0.1m. Ce domaine est rempli d‘une phase liquide
d‘indium de caractéristiques principales suivantes :
l = 7300 kg/m3
cp,l = 233 J/kg.K
La température initiale de la phase à l‘état liquide est Til = 473.15K.
Au centre de ce domaine (cf. figure 1), un bloc de phase solide carré de coté a=0.025m est
initialisé à la température Tis = 423.15K, ce qui est inférieur à la température de changement
phase Tf = 429.75K. Les caractéristiques de la phase solide de l‘indium sont les suivantes :
s = 7300 kg/m3
cp,s = 233 J/kg.K
De plus, la chaleur latente de fusion est Lf = 28.6.103 J/kg.
Figure 1. Configuration initiale du problème
A l‘instant initial, le domaine possède la chaleur suivante :
Glace
Eau
LaPhase solide
Phase liquide

58
𝜌𝑠𝑐𝑝 ,𝑠𝑇𝑖𝑠𝑎2 + 𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑖
𝑙(𝐿2 − 𝑎2)
A l‘instant final, et dans le cas où toute la phase à l‘état solide a fondu, la chaleur du domaine
fait intervenir la température d‘équilibre Teq :
𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑒𝑞𝑙 𝐿2 + 𝜌𝑙𝐿𝑓𝑎2
Les conditions aux limites sont de type adiabatique, si bien que l‘énergie est conservée :
𝜌𝑠𝑐𝑝 ,𝑠𝑇𝑖𝑠𝑎2 + 𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑖
𝑙 𝐿2 − 𝑎2 = 𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑒𝑞𝑙 𝐿2 + 𝜌𝑙𝐿𝑓𝑎2
On obtient ainsi la température finale (homogène) du domaine :
𝑇𝑒𝑞𝑙 =
𝜌𝑠𝑐𝑝 ,𝑠𝑇𝑖𝑠𝑎2 + 𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑖
𝑙 𝐿2 − 𝑎2 − 𝜌𝑙𝐿𝑓𝑎2
𝜌𝑙𝑐𝑝 ,𝑙𝐿2
3.13.3 Modèles et méthodes numériques Ce cas nécessite la résolution de l‘équation de l‘énergie avec activation du changement d‘état.
Les conditions aux limites sont adiabatiques, la température du domaine est initialisée à
473.15K et une température est initialisée dans un carré de dimensions 0.025m par 0.025m à
une valeur de 423.15K.
Le cas a été exécuté en séquentiel. Les résultats sont proposés sous forme de l‘erreur entre la
solution analytique et la solution numérique en fonction du pas de temps (la température
d‘équilibre est homogène sur tout le domaine) :
𝑒𝑟𝑟𝑒𝑢𝑟 = 𝑇𝑎𝑛 − 𝑇𝑛𝑢𝑚 /𝑇𝑎𝑛
3.13.4 Résultats et commentaires
La solution ne présente pas de dépendance spatiale (température uniforme). Nous choisissons
donc un maillage unique, le volume numérique de la phase solide servant à l‘établissement de
la solution exacte. La convergence temporelle est étudiée. Pour un maillage 16×16, le tableau
suivant donne les erreurs en fonction du pas de temps. On obtient un ordre de convergence
temporel de 0.99 mais qui diminue lorsque le pas de temps augmente. Ceci traduit le fait
qu‘une CFL thermique basée sur la vitesse du front de solidification doit être observée.
Pas de temps
Erreur
relative
Ordre local
2.0E-01 2.3837E-02
2.0E-02 7.6391E-03 0.49
2.0E-03 1.5211E-03 0.70
2.0E-04 2.0900E-04 0.86
2.0E-05 2.1486E-05 0.99

59
3.13.5 Fichiers de données associés Le fichier est fusion_totale.don. On prendra un maillage 16×16 et un pas de temps de
t=2s. Cette configuration doit donner une température homogène égale à
456.281718241386K.
3.13.6 Références [1] Voller, Fast implicit finite-difference method for the analysis of phase change problems,
Numerical Heat Transfer, 1990, vol. 17, p. 155-189.


61


63
3.14 Changement d’état liquide/solide franc : fusion partielle
3.14.1 Intérêt L‘objectif de ce cas test est de s‘assurer que lors du changement d‘état, l‘énergie globale est
conservée, et donc que la fraction solide est correctement calculée (cohérente avec la
température). Ce cas test permet de vérifier l‘ordre de convergence en espace de la méthode
de Voller [1].
Soient Tf la température de changement d‘état et fs la fraction solide. Dans le modèle de
changement d‘état franc, la contrainte suivante doit être respectée :
𝑓𝑠 = 0 𝑠𝑖 𝑇 > 𝑇𝑓
𝑓𝑠 = 1 𝑠𝑖 𝑇 < 𝑇𝑓
0 < 𝑓𝑠 < 1 𝑠𝑖 𝑇 = 𝑇𝑓
3.14.2 Description Le cas que l‘on valide fait appel à une solution analytique. On considère un domaine carré de
coté L=0.1m. Ce domaine est rempli du matériau (noté A) liquide de caractéristiques
principales suivantes :
l = 1000 kg/m3
cp,l = 200 J/kg.K
La température initiale du liquide est Til = 275.15K
Au centre de ce domaine (figure 1), un bloc de matériau A solide carré de coté a=0.025m est
initialisé à la température Tis = 253.15K, ce qui est inférieur à la température de changement
phase Tf = 273.15K.
Les caractéristiques de la phase solide sont les suivantes :
s = 1000 kg/m3
cp,s = 200 J/kg.K
De plus, la chaleur latente de fusion est Lf = 1.104 J/kg

64
Figure 1. Configuration initiale du problème
A l‘instant initial, le domaine possède la chaleur suivante :
𝜌𝑠𝑐𝑝 ,𝑠𝑇𝑖𝑠𝑎2 + 𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑖
𝑙(𝐿2 − 𝑎2)
A l‘instant final, et dans le cas où on obtient un équilibre entre la phase liquide et la phase
solide, tout le domaine est à la température de fusion Tf. On appellera Vf le volume solide
final. Le volume final liquide est donc L2-Vf. Dans ce cas, la chaleur dans le domaine s‘écrit
sous la forme :
𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑓 𝐿2 − 𝑉𝑓 + 𝜌𝑠𝑐𝑝 ,𝑠𝑇𝑓𝑉𝑓 + 𝜌𝑙𝐿𝑓 𝑎2 − 𝑉𝑓
Les conditions aux limites sont de type adiabatique, si bien que l‘énergie est conservée :
𝜌𝑠𝑐𝑝 ,𝑠𝑇𝑖𝑠𝑎2 + 𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑖
𝑙 𝐿2 − 𝑎2 = 𝜌𝑙𝑐𝑝 ,𝑙𝑇𝑓 𝐿2 − 𝑉𝑓 + 𝜌𝑠𝑐𝑝 ,𝑠𝑇𝑓𝑉𝑓 + 𝜌𝑙𝐿𝑓 𝑎2 − 𝑉𝑓
On obtient ainsi le volume de solide final :
𝑉𝑓 = 𝑎2 +𝐶𝑝
𝐿𝑓𝐿2 𝑇𝑓 − 𝑇𝑖
𝑙 +𝐶𝑝
𝐿𝑓𝑎2 𝑇𝑖
𝑙 − 𝑇𝑖𝑠
3.14.3 Modèles et méthodes numériques Ce cas nécessite la résolution de l‘équation de l‘énergie avec activation du changement de
phase par le terme SC.
𝜌𝐶𝑝 𝜕𝑇
𝜕𝑡+ 𝑉. ∇𝑇 = ∇. 𝜆∇𝑇 + 𝑆𝐶
Les conditions aux limites sont adiabatiques, la température du domaine est initialisée à
475.15K et la température est initialisée dans un carré de dimensions 0.025m par 0.025m à
une valeur de 253.15K. La solution analytique de ce problème est un volume Vf = 5.10-4
m2.
Le cas a été exécuté en séquentiel et en parallèle.
Les résultats sont proposés sous forme de l‘erreur relative entre la solution analytique et la
solution numérique en fonction du maillage :
Glace
Eau
LaPhase solide
Phase liquide

65
𝑒𝑟𝑟𝑒𝑢𝑟 = 𝑉𝑓 ,𝑎𝑛 − 𝑉𝑓 ,𝑛𝑢𝑚 /𝑉𝑓,𝑎𝑛
3.14.4 Résultats et commentaires
Les résultats sont obtenus pour des maillages de 8×8, 16×16, 32×32 64×64 et un pas de temps
t = 1.10-2
s. Ils font apparaître un ordre de convergence spatial proche de 1. On observe au
fur et à mesure du raffinement du maillage une diminution de l‘ordre de convergence que
nous attribuons à l‗augmentation des erreurs temporelles relativement aux erreurs de
discrétisation spatiale. La convergence spatiale d‘ordre 1 seulement, alors que l‘équation est
discrétisée à l‘ordre 2, est due à la convergence du volume numérique initiale vers le volume
initial théorique à l‘ordre 1.
N Erreur Ordre local
8 0.00117727
16 0.0005504 -1.09689582
32 0.00027964 -0.97688639
64 0.00015518 -0.84965288
3.14.5 Fichiers de données associés Le fichier est fusion_partielle.don.
3.14.6 Références [1] Voller, Fast implicit finite-difference method for the analysis of phase change problems,
Numerical Heat Transfer, 1990, vol. 17, p. 155-189.


67
3.15 Changement d’état liquide/solide franc : problème de Stefan
3.15.1 Intérêt
L‘objectif de ce cas test est de s‘assurer que lors du changement d‘état, la position du front de
changement de phase (solidification) est bien résolue par l‘équation de conservation de
l‘énergie et la méthode de Voller [1]. Ce cas test permet de vérifier l‘ordre de convergence en
espace de la méthode. Soient Tf la température de changement d‘état et fs la fraction solide.
Dans le modèle de changement d‘état franc, la contrainte suivante (1) doit être respectée :
𝑓𝑠 = 0 𝑠𝑖 𝑇 > 𝑇𝑓
𝑓𝑠 = 1 𝑠𝑖 𝑇 < 𝑇𝑓
0 < 𝑓𝑠 < 1 𝑠𝑖 𝑇 = 𝑇𝑓
3.15.2 Description
Le problème de Stefan possède une solution semi-analytique. On considère un domaine carré
de coté L=0,1m. Ce domaine est rempli du matériau (noté A) liquide de caractéristiques
principales suivantes :
ρl = 1000 kg.m-3
cp,l = 4185 J.kg-1
.K-1
λl = 0,55 W.m-1
.K-1
La température initiale du liquide est Til = 275 K. Sur la frontière gauche du domaine (figure
1), la température est imposée, Tis = 272K, qui est inférieure à la température de changement
phase Tf=273,15K. Les caractéristiques de la phase solide sont les suivantes :
ρs = 1000 kg.m-3
cp,s = 2060 J.kg-1
.K-1
λs = 2,1 W.m-1
.K-1
De plus, la chaleur latente de fusion est Lf = 33,3 kJ.kg-1
.
Figure 1. Configuration initiale du problème simulé
Phase Liquide
A
Til
L Ti
s
(1)

68
Ce problème de suivi de front de solidification est un problème possédant une solution semi-
analytique, la solution de validation découle d‘un calcul préliminaire portant sur l‘équation
transcendante suivante (2), en ξ (voir [2] pour plus de détails) :
exp (−𝜉2)
erf (𝜉)+
𝜆𝑙
𝜆𝑠
𝛼𝑠
𝛼𝑙
𝑇𝑓−𝑇∞
𝑇𝑓−𝑇0
exp (−𝜉2𝛼𝑠𝛼𝑙
)
erfc (𝜉 𝛼𝑠𝛼𝑙
)=
𝜉𝐿 𝜋
𝐶𝑝𝑠(𝑇𝑓−𝑇0)
Cette équation ne possède qu‘une unique solution positive si elle existe. Cette solution permet
d‘obtenir l‘évolution de la position du front S par rapport à sa position initiale, en fonction du
temps, à l‘aide de l‘équation (3) :
𝑆 = 2𝜉 𝛼𝑠𝑡
3.15.3 Modèles et méthodes numériques
Ce cas nécessite la résolution de l‘équation de l‘énergie avec activation du changement de
phase par un terme source SC, résultant de la linéarisation du terme de changement de phase
apparaissant dans l‘enthalpie, soit 𝑆𝑐 = 𝜌𝐿𝑓𝜕𝑓𝑠
𝜕𝑡. Dans l‘algorithme de résolution du point fixe
de Voller, le paramètre numérique de seuil de convergence utilisé est =10-13
. Les
conditions aux limites sont adiabatiques en haut, à droite et en bas, la température du domaine
est initialisée à 275 K et la température est imposée sur la limite gauche à la valeur constante
de 272 K.
Dans un premier temps, il faut estimer la valeur de la variable ξ, solution de l‘équation
transcendante. Pour ce cas d‘étude, la solution semi-analytique issue de la résolution de
l‘équation transcendante donne ξ = 0,15449669661769.
Les résultats sont proposés sous forme de l‘erreur absolue (4), en norme L², entre la solution
semi-analytique et la solution numérique de la position du front en fonction du maillage :
𝑒𝑟𝑟𝑒𝑢𝑟𝑎𝑏𝑠 = 𝑠𝑓 ,𝑎𝑛 (𝑡𝑖) − 𝑠𝑓 ,𝑛𝑢𝑚 (𝑡𝑖) ²𝑁𝑇𝑀𝑖=0
avec ti = i*Δt.
3.15.4 Résultats et commentaires
Le problème est mono-dimensionnel, nous ferons varier le maillage selon la direction de
propagation du front, à savoir x1 (Ox). Les résultats sont obtenus pour des maillages de
64×8, 128x8, 256x8, 512x8 et 1024x8 et un pas de temps Δt = 10-1
s. Ils font apparaître un
ordre de convergence spatial proche de 1 (différente de l‘ordre formel égal à 2).
Maillage N erreur abs Ordre local
64 1.193691753 128 0.546900357 1.17
256 0.280713377 1.04
512 0.142126704 1.02
(2)
(3)
(4)

69
1024 0.072111026 1.00
Tableau 1 : erreurs en fonction du maillage et ordre de convergence spatiale.
Cette étude a été aussi menée pour différents pas de temps afin de noter si une différence
apparait et de constater la dépendance temporelle de notre problème (cf. figure 3). Une
convergence spatiale d‘ordre 1 est observée, le léger décrochage de la courbe correspondant à
un pas de temps de 10s sur les maillages les plus fins étant du à une saturation des erreurs
spatiales par l‘erreur temporelle.
Figure 2. Ordre de convergence en espace, pour différents pas de temps.
Une étude de convergence en temps a été aussi menée. Pour celle-ci, un maillage 512x8 a été
utilisé, le pas de temps étant ici la variable de convergence, pour un temps physique de 500s.
Le tableau suivant décrit les différents cas de notre étude.
Δt (s) erreur abs
10.0000 0.0172
1.0000 0.0145
0.1000 0.0143
0.0500 0.0143
0.0100 0.0143
Tableau 1 : erreurs en fonction du pas de temps.
Nous pouvons noter que d‘un point de vue dépendance temporelle, notre étude de
convergence est loin de l‘ordre 1 attendu. Nous sommes très proches d‘un ordre 0.
Nous avons réalisé une étude sur l‘impact du résidu du point fixe sur la qualité de la solution
et sur l‘ordre de convergence en temps de notre modèle. Cette étude a été menée pour un
maillage de 512x8, le pas de temps étant variable selon le cas, et les résultats sont rapportés
dans la figure 5.
0.01
0.10
1.00
100 1000
L²(e
rre
ur)
maillage
0,1s 1s 10s

70
Figure 3. Erreurs en fonction du pas de temps pour différents
résidus de l’algorithme de point fixe.
Nous pouvons observer une nette dépendance de la précision de la position du front selon le
résidu du point fixe demandé, mais au-delà de certaines valeurs, cette précision n‘évolue pas.
Ici, une étude avec un résidu demandé à 10-7
aurait semble-t-il suffit. Par contre, l‘ordre de
convergence temporelle n‘est que peu impacté par cette valeur de résidu.
Une étude est en cours afin d‘améliorer les ordres de convergence en espace ou en temps. Il
reste à cerner le réel problème sous-jacent qui dégrade les ordres.
3.15.5 Fichiers de données associés
Le fichier est stefan.don.
3.15.6 Références
[1] Voller, Fast implicit finite-difference method for the analysis of phase change problems,
Numerical Heat Transfer, 1990, vol. 17, p. 155-189.
[2] Gupta, The Classical Stefan Problem, Applied Mathematics and Mechanics, 2003, vol. 45.

71
3.16 Ecoulement compressible : injection d’eau dans une cavité fermée
3.16.1 Intérêt
L‘objectif de ce cas test est de comparer l‘évolution de la masse volumique et de la pression
numériques données par le modèle 1-fluide compressible [1] aux solutions analytiques afin de
valider ce modèle dans un cas diphasique simple.
3.16.2 Description
L‘air est comprimé dans une cavité à l‘aide d‘un piston liquide situé sur la limite inférieure,
de l‘eau quasiment incompressible. La masse d‘air est constante et son volume varie au cours
du temps en fonction du volume d‘eau injecté. Le tableau 1 donne les caractéristiques
thermophysiques des 2 fluides.
AIR EAU
Masse volumique (kg.m3) 1.176829268 1000
Viscosité (Pa.s) 1.85.10-5
1.10-3
Compressibilité (Pa-1
) 9.8692327.10-6
0.444.10-9
Tableau 1. Propriétés de l’eau et de l’air
La cavité est un carré de côté 0.1m. Le nombre de Reynolds est Re=10000.
Figure 1. Injection d’eau dans une cavité fermée contenant de l’air
La masse de l‘air, constante et égale à m0, est comprimée par un piston liquide, qui avance à
une vitesse constante V0=0.1m.s-1
. La masse volumique de l‘air varie au cours du temps
suivant la loi :
0.1m
EAU V0=0.1m/s
AIR
0.1m
EAU

72
0 0 0 0 0 0
00 0 0 0 0 0
0
( )
1
m H S Ht
V tV tS H S V tS H V t
H
Initialement, un volume d‘eau de largeur 0.1m et de hauteur 0.025m est présent dans le bas de
la cavité. H0=0.075m est la hauteur initiale d‘air dans la cavité et S=0.01m² la surface de la
cavité. La pression analytique est calculée à partir de la masse volumique analytique :
p(t)=ρ(t)RT0.
La masse volumique après 0.5s est égale à ρ=3.5304kg/m3. La pression est égale à
p=ρRT0=3.5304*287*300=303967 Pa.
3.16.3 Modèles et méthodes numériques
L‘équation de Navier Stokes (schéma centré, solveur MUMPS) et d‘advection de la phase eau
(méthode VOF-PLIC) sont résolues. Le modèle compressible pour des nombres de Mach
faibles est utilisé [1].
Conditions aux limites : La vitesse normale est imposée pour la limite inférieure du domaine.
Pour les autres côtés, une condition de type symétrie est imposée.
Le calcul est réalisé en séquentiel. Le calcul a été testé en parallèle sur un maillage 128*128
et donne les mêmes résultats.
3.16.4 Résultats et commentaires
La pression augmente au cours du temps (Figure 2 pour la pression dans l‘air) mais elle est
uniforme à l‘intérieur de la cavité, dans l‘air et dans l‘eau.
Un comportement correct de la solution numérique est observé. Le liquide reste
incompressible avec une masse volumique constante de 1000kg/m3 (Figure 3). Avant t=0.25s,
le point de coordonnées (0.05, 0.05) est dans l‘air, sa masse volumique augmente donc selon
la loi (1). Dès que ce point se situe dans l‘eau, la masse volumique reste constante et égale à
1000 kg.m-3
.
Différents maillages sont testés pour évaluer la convergence de la solution. Dans le tableau 2,
la masse volumique est donnée pour les différents maillages ainsi que l‘erreur relative avec la
solution analytique. Une convergence régulière vers la valeur théorique est remarquée. Avec
le maillage 512*512, la différence entre la masse volumique analytique et celle numérique est
d‘environ 0.0017%.
Maillage ρ(0.3s) erreur Ordre local
32*32 1,950604680566450E+00 5,494815711196050E-03
64*64 1,955483575404450E+00 3,007337721252070E-03 8,695842055829210E-01
128*128 1,958884546931620E+00 1,273370890819220E-03 1,239834200541060E+00
256*256 1,960609272337180E+00 3,940290260156210E-04 1,692278875437210E+00
512*512 1,961432514349320E+00 2,569643509623580E-05 3,938661778005610E+00
1024*1024 1,961312387014700E+00 3,554983291731770E-05 -4,682745531333900E-01
Tableau 2. Masse volumique à t=0.3s. La masse volumique théorique est de
1,961382113821130kg/m3.

73
L‘erreur relative entre la masse volumique numérique et théorique diminue quand le maillage
utilisé est plus fin. Cependant, l‘ordre de convergence spatiale n‘est pas 2. L‘aspect
diphasique engendre des erreurs notamment dans la localisation de l‘interface, le terme de
compressibilité qui dépend de la phase, les interpolations linéaires et moyennes.
Figure 2. Evolution de la pression dans l’air pour différents maillages
Figure 3. Evolution de la masse volumique au centre de la cavité
3.16.5 Fichiers de données associés
Le fichier est piston_diph_comp.don.
3.16.6 Références
[1] J.P. Caltagirone, S. Vincent, C. Caruyer. A multiphase compressible model for the
simulation of multiphase flows, en correction dans International Journal of Multiphase flow,
2009


75
3.17 Ecoulement compressible : oscillations d’une bulle d’air dans de
l’acier fondu
3.17.1 Intérêt
Le problème de la simulation des mouvements d‘une bulle d‘air, initialement déformée, qui
oscille dans de l‘acier fondu est considéré. L‘objectif de ce cas test est de comparer les
fréquences d‘oscillations de cette bulle, simulées par le modèle 1-fluide compressible [1] à
celles données par la théorie linéaire [2].
3.17.2 Description
La bulle d‘air est contenue dans une cavité fermée qui contient de l‘acier fondu de densité.
Elle est initialement déformée, de forme elliptique. Le grand rayon est a=R(ε+1) avec R le
rayon de la goutte sphérique équivalente et ε la déformation initiale.
Figure 1.Bulle d’air déformée
Sous l‘effet des forces de tension superficielle, la bulle se met à osciller pendant un temps très
long et devient finalement cylindrique par dissipation visqueuse de l‘énergie interfaciale et de
l‘énergie cinétique.
Air Acier fondu
Masse volumique (kg.m3) 1.17683 7000
Viscosité dynamique(Pa.s) 1.85.10-5
4.10-3
Compressibilité (Pa-1
) 9.8692327.10-6
1.10-9
Tableau 1. Propriétés de l’air et de l’acier fondu
3.17.3 Modèles et méthodes numériques
L‘équation de Navier Stokes (schéma centré, solveur MUMPS) et d‘advection de la phase air
(schéma VOF-PLIC) sont résolues. Le modèle compressible pour des nombres de Mach
faibles est utilisé [1]. Pour les tensions superficielles, le modèle de Brackbill avec
régularisation de la fonction couleur est utilisé. Le calcul est réalisé en séquentiel.
3.17.4 Résultats et commentaires
Les fréquences numériques d‘oscillation de la goutte sont comparées aux valeurs
analytiques. Pour comparer les simulations avec la théorie linéaire, de petites perturbations
initiales doivent être appliquées, ce qui suppose que le maillage soit très dense.
b
R
a=R(ε+1)

76
L‘évolution de la fréquence en fonction de la perturbation initiale est menée sur un maillage
512*512 et les résultats sont présentés dans le tableau 1. On remarque que la fréquence
numérique tend bien vers la fréquence analytique quand ε, la déformation initiale de la goutte
par rapport au rayon d‘un disque de volume équivalent, décroît. Il serait nécessaire de mener
la même étude sur un maillage 5 fois plus fin (2560²) pour atteindre le niveau de perturbation
initiale correspondant à la théorie linéaire. Ce travail sera mené en parallèle. Un exemple
d‘évolution temporelle du rayon vertical de la goutte pour =0.4 est donné sur la figure 2. On
remarque le caractère amorti des oscillations (dissipation visqueuse) et la présence
d‘irrégularités dans la forme des oscillations qui sont dues pour celles à plus grandes échelles
au caractère non-linéaire du mode d‘oscillation ( grand) et pour celles à plus petites échelles
aux défauts du modèle de tension de surface.
ε Fréquence[s-
1]
0.4 4.66479
0.2 5.03814
0.1 5.21205
0.05 5.50479
Tableau 1. Fréquence d’oscillation de la bulle pour différentes perturbations initiales pour un
maillage 512*512. La fréquence théorique est 5.70632s-1
.
Si l‘on souhaite se place dans le cadre de la théorie linéaire, une étude de convergence
classique en maillage n‘est pas envisageable en raison de la finesse des maillages qui seraient
nécessaires. Néanmoins, nous pouvons sortir du cadre de la théorie linéaire et étudier
l‘évolution de la fréquence pour =0.2 en fonction du maillage afin d‘éviter d‘avoir à générer
des maillages trop fins. Les fréquences obtenues pour différents maillages sont données dans
le tableau 2.
Maillage Δt Fréquence [s-1]
32*32 0.002 4.36758
64*64 0.001 4.79187
128*128 0.0005 4.95222
256*256 0.00025 4.98973
512*512 0.000125 5.03814
Tableau 2. Fréquence d’oscillation de la bulle pour différents maillages. La fréquence
théorique pour une bulle de même volume faiblement perturbée est 5.70632s-1
.La déformation
initiale est ε=0.2

77
On remarque que la fréquence numérique obtenue (de l‘ordre de 5s-1) est dans la gamme
attendue prédite dans le régime linéaire par la théorie (5.70632s-1
). Cette fréquence théorique
correspond à la fréquence naturelle d‘une goutte de même volume faiblement perturbée. En
effet, nous ne sommes pas dans le cadre de la théorie linéaire, même lorsque la déformation
initiale ε est petite (0.05). L‘évolution de la fréquence numérique, lorsque le maillage est
raffiné, vers une valeur proche de celle naturelle prédite par la théorie constitue une
validation physique du modèle 1-Fluide compressible avec prise en compte des tensions de
surface.
Figure 2. Evolution du rayon vertical de la bulle au cours du temps (déformation initiale :
ε=0.4, maillage 128*128)
3.17.5 Fichiers de données associés
goutte_acier.don
3.17.6 Références
[1] J.P. Caltagirone, S. Vincent, C. Caruyer. A multiphase compressible model for the
simulation of multiphase flows, en correction dans International Journal of Multiphase flow,
2009
[2] A. Prosperetti. Free oscillations of drops and bubbles: the initial problem, J. Fluid. Mech.,
100(1980)333-347


79
3.18 Ecoulement compressible : compression d’une bulle d’air
3.18.1 Intérêt
Ce cas test de la compression d‘une bulle d‘air par de l‘eau permet de valider le modèle 1-
Fluide compressible [1] dans un cas diphasique simple à faible Mach. Une comparaison de la
masse volumique avec la solution analytique est menée.
3.18.2 Description
Une bulle d‘air, de rayon R=30mm, est comprimée par de l‘eau dans une cavité carrée et
fermée de côté 0.1m. L‘écoulement d‘eau est très lent, V0 vaut 0.0025m.s-1
. La gravité et les
forces de tension de surface ne sont pas prises en compte.
Figure 1. Géométrie du problème
Le volume initial de la bulle est connu,0
0
ol
mV
, avec m0 la masse initiale d‘eau égale à
0.0333kg et 0 la masse volumique initiale de l‘air égale à 1.17682926829268kg/m3, tout
comme le débit d‘eau injecté. L‘équation théorique de la densité en fonction du temps est :
0
2
( )
1
tqt
R
Avec q le débit volumique de l‘eau égal à 0.001m3.s
-1.
La pression analytique est calculée à partir de la masse volumique analytique : p(t)=ρ(t)*r*T0.
AIR EAU
Masse volumique (kg.m3) 1.17682926829268 1000
Viscosité (Pa.s) 1.85.10-5
1.10-3
Compressibilité (Pa-1
) 9.869232667160130.10-6
0.444.10-9
Tableau 1. Propriétés de l’eau et l’air
V0
V0
V0
V0 0.1m
V0

80
3.18.3 Modèles et méthodes numériques
L‘équation de Navier Stokes (schéma centré, solveur MUMPS) et de l‘advection de la phase
air (résolue par la méthode VOF-PLIC) sont résolues. Le modèle compressible diphasique,
pour des nombres de Mach faibles, est utilisé [1].
Le calcul est en séquentiel. Les conditions aux limites sont de type vitesse normale imposée
pour chaque côté. Le calcul a été testé en parallèle sur un maillage 64*64 et donne les mêmes
résultats qu‘en séquentiel. L‘initialisation de la bulle d‘air est faite par le mot clé initialisation
objet.
3.18.4 Résultats et commentaires
Le volume de la bulle se réduit très rapidement jusqu‘au collapse qui a lieu à t=2.82s, ce qui
est en accord avec la théorie, qui donne un temps de 2.8274333s. Les effets de maillage
deviennent alors très importants (rayon de la bulle inférieure au pas d‘espace constant). Pour
tester la convergence spatiale, les calculs sont réalisés sur 5 maillages différents à pas
constant : 32x32, 64x64, 128x128, 256x256, 512x512.
La comparaison entre les simulations et les solutions analytiques pour les différents maillages
est donnée sur la figure 2 pour la masse volumique et sur la figure 4 pour la pression. Les
résultats numériques convergent vers la solution analytique quand le nombre de cellules du
maillage augmente (tableau 2). Le pas de temps utilisé est Δt=0.00125s.
Maillage ρ(1.5s) Erreur Ordre local
32*32 2,344546005843390E+00 6,466830118662820E-02
64*64 2,425448883293160E+00 3,239295849111860E-02 9,973784744267900E-01
128*128 2,465941815911580E+00 1,623873359575440E-02 9,962411113954420E-01
256*256 2,487096712856510E+00 7,799212405550540E-03 1,058038778421430E+00
512*512 2,497824383335940E+00 3,519522338122840E-03 1,147948799708190E+00
1024*1024 2,503211801994450E+00 1,370268950249890E-03 1,360920556034120E+00
Tableau 2. Masse volumique à t=1.5s. La densité théorique est 2.50664658197498kg/m3
La procédure diphasique génère plusieurs sources d‘erreur : dans la localisation de l‘interface,
les interpolations linéaires et moyennes.

81
Figure 2. Evolution de la masse volumique de l’air pour différents maillages
Figure 3. Evolution de la pression dans la bulle d’air
3.18.5 Fichiers de données associés
bulle_comp.don
3.18.6 Références
[1] J.P. Caltagirone, S. Vincent, C. Caruyer. A multiphase compressible model for the
simulation of multiphase flows, en correction dans International Journal of Multiphase flow,
2009.


83
3.19 Advection d'une tâche circulaire dans un tourbillon avec
cisaillement
3.19.1 Intérêt
L‘objectif de ce cas test est de mesurer l'ordre de convergence des méthodes de suivi
d'interface eulériennes sur l'advection d'une tâche circulaire de concentration dans un champ
de vitesse de type tourbillon induisant un transport avec cisaillement.
3.19.2 Description
Dans un domaine carré de coté 1 mètre, on considère l'advection d'une tâche de couleur,
centrée en (0.5, 0.75) et de rayon 0.125 mètres, dans un champ de vitesse analytique de type
tourbillon avec cisaillement donné par [1] :
T
tyxyx
yxx
yxv
yxy
yxu
cos)(sin)(cos1
),(
),(),(
),(),(
22
avec T la période du champ de vitesse. Entre t=0s et t=T, le champ de vitesse passe par
un maximum à t=T/2 avant de s'inverser pour faire revenir la tâche de concentration à
son état initial.
3.19.3 Modèles et méthodes numériques
Ce cas nécessite la résolution de l‘équation d'advection de la fonction couleur C dans un
champ de vitesse analytique, avec déformation de la fonction de phase C sous forme d'un
filament. Après un certain temps, on inverse le champ de vitesse et on effectue un temps
équivalent en sens inverse. Ainsi, on doit retrouver la solution initiale en concentration.
Afin de vérifier si la solution numérique sur C converge vers la valeur de cette fonction à
l'instant initial après 1 tour, nous avons calculé l'erreur absolue en norme L1 entre la position
initiale de l'interface et celle finale, qui doit être théoriquement la même.
3.19.4 Résultats et commentaires
Nous avons fait varier le maillage entre 64 et 512 maillages par direction d'espace (tableau ci-
dessous) et nous avons utilisé un pas de temps de 0.0005 s pendant 12 000 itérations de calcul,
soit une période T=6 s. Les ordres de convergence et les erreurs associées obtenues avec les
méthodes de suivi d'interface VOF-PLIC, VOF-TVD, VOF-SM et Level Set sont donnés.
On remarque que la méthode la plus précise est VOF-SM sans redistribution des particules au
cours du temps (notée VOF-SM), avec un ordre infini quelque soit le maillage (la solution
initiale est retrouvée à 10-9
près). Vient ensuite la méthode VOF-SM avec redistribution
(notée VOF-SM Red) qui est à un ordre tendant vers 1 avec un niveau d'erreur plus bas que
toutes les autres méthodes dès les maillages grossiers. La deuxième méthode la plus précise
est VOF-PLIC, puis Level-Set et enfin VOF-TVD. En terme d'ordre de convergence, on

84
remarque que Level Set est d'ordre 2, VOF-PLIC d'ordre entre 1 et 2 sur les maillages
grossiers avec un ordre qui stagne ensuite en terme de niveau d'erreur, et enfin TVD qui est
d'ordre 1.
Méthode Erreur 64 x 64 Erreur 128 x 128 Erreur 256 x 256 Erreur 512 x 512
Level Set 0.07078 0.016909 0.003513 0.00086129
Ordre 2.07 2.27 2.03
VOF PLIC 0.0068253 0.0019718 0.0014527 0.0013152
Ordre 1.79 0.44 0.14
VOF TVD 0.05759 0.02593 0.012245 0.00588
Ordre 1.10 1.08 1.06
VOF SM 2.7648e-09 2.6143e-9 2.5377e-9 3.4956e-9
Ordre ∞ ∞ ∞
VOF SM Red 0.000786 0.00049292 0.00035658 0.00018994
Ordre 0.67 0.47 0.91
Une illustration des solutions obtenues avec les différentes méthodes sur un maillage 64 au
carré après un tour et après retour à l'état initial est proposée sur les figures 1 et 2. On
remarque de très fortes distorsions des solutions après aller-retour pour VOF-PLIC et Level-
Set, une diffusion très grande de VOF-TVD et une solution assez proche de celle attendue
avec VOF-SM (le filament est continu et la forme finale est proche d'un cercle), malgré la
redistribution des particules qui altère la qualité des simulations. Sans redistribution, la
solution obtenue après aller-retour est quasiment analytique (voir tableau 1). On remarque les
méthodes VOF-TVD et Level set ne conservent pas le volume initial. Elle n'est pas montrée
ici. Il faut noter que le maillage 64 x 64 correspond typiquement au maximum de mailles qui
seront disponibles dans des simulations réalistes d'écoulements diphasiques.
Si l'on considère maintenant un maillage beaucoup plus dense (512 x 512 sur les figures 3 et
4), on remarque que toutes les méthodes convergent vers la bonne solution, avec les défauts
observés précédemment qui transparaissent malgré tout (diffusion de VOF-TVD, bruit autour
de l'interface pour VOF-SM si l'on active la redistribution des marqueurs).
3.19.5 Fichiers de données associés
Les fichiers associés sont advection2d_vof-tvd.don, advection2d_vof-plic.don,
advection2d_vof-sm.don et advection2d_level-set.don.
3.19.6 Références
[1] S. Vincent, G. Balmigère, J.-P. Caltagirone, E. Meillot, Eulerian–Lagrangian multiscale
methods for solving scalar equations – Application to incompressible two-phase flows, in J.
Comput. Phys., 2010, vol. 229, p. 73-106

85
VOF-PLIC VOF-SM
Level Set VOF-TVD
Figure 1 : fonction de phase sur un maillage 64 x 64 après 6000 itérations pour les méthodes
VOF-PLIC, VOF-SM avec redistribution, Level Set et VOF-TVD.
VOF-PLIC VOF-SM
Level Set VOF-TVD
Figure 2 : fonction de phase sur un maillage 64 x 64 après 12000 itérations pour les
méthodes VOF-PLIC, VOF-SM avec redistribution, Level Set et VOF-TVD.

86
VOF-PLIC VOF-SM
Level Set VOF-TVD
Figure 3 : fonction de phase sur un maillage 512 x 512 après 6000 itérations pour les
méthodes VOF-PLIC, VOF-SM avec redistribution, Level Set et VOF-TVD.
VOF-PLIC VOF-SM
Level Set VOF-TVD
Figure 4 : fonction de phase sur un maillage 512 x 512 après 12000 itérations pour les
méthodes VOF-PLIC, VOF-SM avec redistribution, Level Set et VOF-TVD.

87
4 Écoulement isothermes monophasiques laminaires


89
4.1 Écoulement laminaire autour d’une marche descendante (E,N)
4.1.1 Intérêt L‘écoulement laminaire isotherme autour d‘une marche posée dans un canal plan a été
largement étudié dans la littérature depuis les expériences de référence d‘Armaly et al. [1]. Le
brusque élargissement de la section provoque un gradient de pression inverse qui conduit à
une séparation de l‘écoulement en plusieurs zones, avec l‘apparition d‘une recirculation
derrière la marche et, quand le Reynolds augmente, d‘une seconde sur la paroi supérieure. Il
est important de s‘assurer que le code reproduit bien l‘ensemble de ces phénomènes. D‘autre
part, nous utilisons ce cas test afin de valider le couplage avec Gambit pour des maillages
multiblocs conformes et non-conformes.
4.1.2 Description Il s‘agit d‘étudier l‘écoulement laminaire isotherme autour d‘une marche posée dans un canal
plan. La figure 1 illustre la configuration. Le nombre de Reynolds Re= HdUmoy/ varie entre
100 et 1000, avec Hd la hauteur du canal, Umoy la vitesse moyenne en amont de
l‘élargissement du canal, et la viscosité cinématique. Nous évitons ainsi la zone de
transition comprise entre 1200 et 6600. L‘expérience d‘Armaly été faite dans un canal large
de 36.735 fois la hauteur de la marche, assurant ainsi un écoulement bidimensionnel en amont
de la marche. Par contre les effets de paroi ne sont pas négligeables à partir de Re=400 et font
que l‘écoulement ne peut-être considéré comme bidimensionnel. Nous comparons dans cet
exercice les positions des points de décollement et de recollement ainsi que les longueurs des
recirculations à celles observées.
Figure 1. Illustration de la géométrie et de l’écoulement autour d’une marche
La longueur du canal est de 40m et sa hauteur Hd de 2.0612244898m. La marche est de
longueur 4 et de hauteur H=1.
4.1.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues, auxquelles est ajouté le terme de Brinkman afin
de prendre en compte l‘obstacle. La perméabilité sur les points de maillage intérieurs à la
marche est fixée à 10-40
. Les méthodes du lagrangien augmenté ou une méthode de correction
de pression sont utilisées pour résoudre le couplage vitesse/pression.
Un profil de Poiseuille est placé comme condition limite d‘entrée dont la vitesse moyenne est
ajustée de manière à obtenir le nombre de Reynolds voulu (Re=500 correspond à Umoy=1m/s).

90
L‘adhérence est imposée aux conditions limites supérieure et inférieure, et une condition de
Neumann choisie en sortie. Les conditions initiales sont nulles.
Nous avons utilisé 3 maillages différents, à pas constant par direction : 128x32, 256x64 et
512x128. Une simulation a aussi été réalisée avec un maillage Gambit multibloc conforme
afin que la marche ne soit pas maillée ; la géométrie est alors divisée en deux blocs conformes
(l‘interface est située à la fin de la marche). Un maillage Gambit non-conforme (cf. figure 2) a
aussi été utilisé.
Ce cas tourne en séquentiel et en parallèle (sauf pour le cas multibloc).
Figure 2. Maillage multibloc non-conforme
4.1.4 Résultats et commentaires Les résultats correspondent, quelque soit le Reynolds et le maillage, à une convergence
inférieure à 10-10
sur la divergence et la stationnarité de l‘écoulement. Les longueurs des
recirculations sont identiques à 10-10
près avec les deux méthodes de résolution du couplage
vitesse/pression pour le cas Re=500 et un maillage 128x32. Tous les résultats suivants ont été
obtenus avec la méthode du lagrangien augmenté qui est plus rapide à converger. Nous
observons graphiquement une convergence des simulations avec le maillage (cf. figure 3,4,5).
Re<400
Jusqu‘à un nombre de Reynolds de 400, la longueur de la recirculation principale commence
par être sous estimée puis à partir du maillage 128x32 est en parfait accord avec les données
d‘Armaly et se situe dans la zone d‘incertitude expérimentale (cf. figure 3 et tableau 2).
Re400
Pour Re400, la recirculation supérieure apparaît et le point de recollement inférieur continue
à s‘éloigner du pied de la marche.
Si l‘on compare nos résultats à ceux d‘Armaly, la longueur de la recirculation inférieure est à
partir de Re=400 sous estimée, avec une erreur de 9.2% à Re=500 et 19.3% à Re=1000.
Armaly note dans son article que des effets 3D de paroi importants naissent à partir de
Re=400 et persistent jusqu‘à Re=6000. Ils sont la cause des écarts observés comme l‘ont
montré Williams et al. [5] en simulant le canal dans sa totalité.
Enfin, comme le montre le tableau ci-dessous où sont relevés les différents paramètres de
comparaison pour Re=800, la sous estimation de la longueur de la recirculation est
fréquemment observée par les codes de calcul. Il faut noter que les 3 autres auteurs de

91
simulations ont placé la condition d‘entrée directement à la fin de la marche, s‘éloignant ainsi
des conditions expérimentales. Nous avons préféré être plus réaliste et placer la limite à une
distance de 4 fois la hauteur de la marche en amont de la fin de celle-ci. Mais on peut noter
que le positionnement de la limite n‘a qu‘une influence limitée sur les résultats. Dans une
moindre mesure, nous avons fait varier la position des conditions limites d‘entrée et de sortie
et nous n‘avons pas noté d‘effet significatif sur les résultats.
Thétis Exp. Armaly [1] Gartling [2] Kim&Moin [3] Sohn [4]
Xr 12.03 14.2 12.2 12 11.6
Xs 9.67 11.5 9.7 - -
Xrs 20.49 20 20.96 - -
Xrs-Xs 10.82 8.5 11.26 11.5 9.26
Tableau 1. Comparaison des abscisses adimensionnées (x/H) des points de décollement et
recollement des recirculations à Re=800
En ce qui concerne l‘abscisse du point de décollement de la paroi supérieure, nous la sous
estimons assez largement par rapport aux valeurs d‘Armaly à partir de Re=600. La encore, les
effets 3D sont certainement la cause de tels écarts. Les écarts sont moins visibles et plus
réguliers en ce qui concerne la valeur de l‘abscisse du point de recollement supérieur. Enfin, il
faut noter que la longueur de la recirculation supérieure à Re=800 est surestimée d‘environ
17%. En fait, comme le note Armaly, les longueurs des deux recirculations sont fortement
couplées, la sous estimation de l‘une entraînant la surestimation de l‘autre (ou vice versa).
Figure 3. Longueur adimensionnée de la recirculation inférieure (xr/H) en fonction du
nombre de Reynolds
2
4
6
8
10
12
14
16
0 100 200 300 400 500 600 700 800 900 1000
Xr/
H
Re
128x32 256x64 512x128 Exp. Armaly

92
Figure 4. Abscisse adimensionnée du point de décollement (xs/H) supérieur en fonction du
nombre de Reynolds
Figure 5. Abscisse adimensionnée du point de recollement (xrs/H) supérieur en fonction du
nombre de Reynolds
Maillage\Re 100 200 300 400 500
128x32 2.808495 4.775047 6.517473 8.079737 9.431830
256x64 2.952192 5.005746 6.773747 8.278746 9.501144
512x128 2.944457 5.003332 6.780815 8.297798 9.533919
Maillage\Re 600 700 800 900 1000
128x32 10.53273 11.39505 12.10024 12.72856 13.31648
256x64 10.46232 11.25180 11.95148 12.60073 13.21581
512x128 10.51119 11.31489 12.02633 12.68655 13.31205
Tableau 2. Longueur de la recirculation inférieure en fonction du nombre de Reynolds et du
maillage
6
7
8
9
10
11
12
13
14
300 400 500 600 700 800 900 1000
Re
Xs/H
128x32 256x64 512x128 Exp. Armaly
6
8
10
12
14
16
18
20
22
24
26
300 400 500 600 700 800 900 1000
Re
Xrs
128x32 256x64 512x128 Exp. Armaly

93
Maillage\Re 400 500 600 700
128x32 - 9.692976 9.648883 9.994373
256x64 8.676417 8.414661 8.829751 9.285148
512x128 8.302544 8.285187 8.721770 9.190286
Maillage\Re 800 900 1000
128x32 10.39007 10.80390 11.22308
256x64 9.753846 10.22902 10.70454
512x128 9.667789 10.14972 10.63166
Tableau 3. Abscisse du point de décollement supérieur en fonction du nombre de Reynolds et
du maillage
Maillage\Re 400 500 600 700
128x32 - 11.1 14.4 16.9
256x64 9. 12.9 15.7 18.1
512x128 9.51 13.0 15.7 18.2
Maillage\Re 800 900 1000
128x32 19.2 21.3 23.3
256x64 20.4 22.6 24.7
512x128 20.5 22.7 24.8
Tableau 4. Abscisse du point de recollement supérieur en fonction du nombre de Reynolds et
du maillage
Avec le maillage multibloc conforme, les résultats sont identiques à ceux obtenus avec la
même résolution et un maillage monobloc. L‘intérêt réside dans la non résolution des points
de maillage situés dans la marche. Même si dans ce cas le temps de calcul gagné est faible, il
pourrait être important dans d‘autres configurations.
Dans le cas du maillage multibloc non-conforme, la même étude a été réalisée et validée dans
[6] avec la méthode du lagrangien augmenté. Avec la projection scalaire, on trouve aussi des
résultats similaires. Par exemple, pour Re=1000, on obtient une longueur de la recirculation
inférieure de 13.277, une abscisse du point de décollement supérieur de 10.756 et une abscisse
du point de recollement supérieur de 24.679.
4.1.5 Fichiers de données associés Les fichiers de données associés aux maillages monoblocs sont marchelam2d_la.don et
marchelam2d_cpre.don.
Le fichier de données associé au maillage Gambit multibloc conforme est
marchelam2d_la_gb.don.
Le fichier de données associé au maillage Gambit multibloc non-conforme est
marchelam2d_cpre_gbncg.don.
Les fichiers marchelam2d_la_pw.don et marchelam3d_la_pw.don sont associés à des
maillages multiblocs issus de Pointwise.

94
4.1.6 Références [1] Armaly P.H., Durst F., Pereira J.C.F. & Schonung F., Experimental and theoretical
investigation of backward-facing step flow, Jounal of Fluid Mechanics ,127, 473-496, 1983.
[2] Gartling D.K., A test problem for outflow boundary conditions – flow over a backward-
facing step, International Journal of Numerical Methods in Fluids, 11, 953-967, 1990.
[3] Kim J. & Moin P., Application of a fractional-step method to incompressible Navier-
Stokes equations, Journal of Computational Physics, 59, 308-323, 1985.
[4] Sohn J., Evaluation of FIDAP on some classical laminar and turbulent benchmarks,
International Journal of Numerical Methods in Fluids, 8, 1469-1490, 1988.
[5] Williams P.T. & Baker A.J., Numerical simulations of laminar flow over a 3D backward-
facing step, International Journal for Numerical Methods in Fluids, 24, 1159-11831 1997.
[6] Romé C., Glockner S. & Caltagirone J.P., Resolution of the Navier-Stokes equations on
block-structured meshes, International Journal for Numerical Methods in Fluids, 54 (10),
1239-1268, 2007.

95
4.2 Écoulement laminaire autour d’un triangle (N)
4.2.1 Intérêt L‘écoulement autour d‘un triangle est peu étudié par rapport à ceux autour d‘un carré ou d‘un
cylindre. Cette configuration illustre l‘intérêt des maillages multiblocs non-conformes car les
lignes directrices de l‘obstacle ne sont pas parallèles aux lignes d‘un maillage cartésien.
4.2.2 Description La configuration est présentée figure 1. Nous nous intéressons à 2 gammes d‘écoulement
selon la valeur du nombre de Reynolds par rapport au nombre de Reynolds critique, basé sur
la vitesse moyenne et la longueur de la base du triangle h :
Re < Rec : l‘écoulement est stationnaire. On observe 2 vortex symétriques dans le
sillage du cylindre dont la taille augmente linéairement avec le nombre de Reynolds.
Re ≥ Rec : l‘écoulement est périodique et instationnaire. 2 vortex se forment dans le
sillage du cylindre et s‘en détachent de manière alternée.
Figure 1. Configuration de l’écoulement autour d’un cylindre triangulaire
Jackson [1] a étudié numériquement les écoulements autour d‘obstacles de formes variées.
Pour les triangles isocèles de base 1 et de hauteur 0.8, il a établi un nombre de Reynolds
critique de 34.318 correspondant à un nombre de Strouhal de 0.13554. Zielinska et Wesfreid
[2] ont simulé l‘écoulement autour d‘un triangle équilatéral avec un ratio de blocage de 1/15
et ont trouvé un nombre Reynolds critique de 38.3. De and Dalal [3] ont mené une étude
similaire sur un ratio de blocage de 1/20 et ont trouvé un nombre de Reynolds critique de
39.9. Nous avons choisi de nous baser sur cette dernière étude et étudierons les longueurs des
recirculations pour le régime stationnaire, les coefficients de portance et de traînée ainsi que
les valeurs du nombre de Strouhal pour le régime instationnaire.
4.2.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues par la méthode de correction de pression. Les
conditions aux limites sont les suivantes :
Gauche : u=u0=Cst et v=0.
Droite : condition de Neumann pour u et v
Inf et sup : symétrie (𝜕𝑢
𝜕𝑦= 0; 𝑣 = 0)

96
Les conditions initiales sont nulles pour le cas stationnaire. Pour le cas instationnaire, un
champ de vitesse cisaillé non symétrique est initialisé afin de déstabiliser l‘écoulement. Un
maillage multibloc de 137 980 éléments a été mis en place (cf. figure 2). Ce cas tourne en
séquentiel uniquement.
Figure 2. Maillage multibloc structuré pour l’étude de l’écoulement autour du cylindre
4.2.4 Résultats et commentaires Régime stationnaire Re < Rec
Les longueurs de recirculation LR pour différents nombres de Reynolds sont présentés figure 3
et montrent bien la relation linéaire entre LR et Re. Ces résultats sont en accord avec [3]. La
figure 4 montre les lignes de courant dans le sillage du cylindre.
Figure 3. Longueur de la recirculation en fonction du nombre de Reynolds
0
0.5
1
1.5
2
2.5
3
0 5 10 15 20 25 30 35 40
LR
Nombre de Reynolds
De et Dalal [3] Thétis

97
Figure 4. Lignes de courant autour du triangle en régime
stationnaire : Re=20 (a), Re=30 (b), Re=35(c)
Régime instationnaire Re ≥ Rec
Pour Re=100, nous avons comparé les coefficients de traînée moyen (CD), les coefficients de
traînée de pression moyen (CDp), la moyenne quadratique (rms) du coefficient de portance
(CLrms) ainsi que le nombre de Strouhal, avec les résultats de De et Dalal [3]. Le tableau 1
montre une différence inférieure à 5% à l‘exception du CLrms pour lequel la différence est de
11%. Nous pouvons attribuer ces différences à l‘utilisation de maillages et de méthodes
numériques différentes.
CD CDp CLrms St
Thétis 1.6698 1.3579 0.2626 0.1960
De et Dalal [3] 1.7549 1.2986 0.2974 0.19162
Tableau 1. Coefficients de portance, de traînée et nombre de Strouhal
La figure 5 montre les lignes de courant autour du triangle pendant une période alors que la
figure 6 représente l‘évolution du coefficient de portance et de traînée en fonction du temps,
mettant en évidence le caractère périodique de l‘écoulement.

98
Figure 5. Lignes de courant sur une période de l’écoulement autour d’un triangle
Figure 6. Évolution dans le temps des coefficients de portance et de traînée
-0.5
0
0.5
1
1.5
2
230 250 270 290 310
coe
ff p
ort
ance
et
tra
iné
e
temps
portance trainée

99
4.2.5 Fichiers de données associés Le fichier de données associé à ce cas test est triangle_cpre_gbncf.don.
4.2.6 Références [1] Jackson C.P., A finite-element study of the onset of vortex shedding in flow past variously
shaped bodies. Journal of Fluid Mechanics, 182, 23-45, 1987.
[2] Zielinska B.J. & Wesfreid J.E., On the spatial structure of global modes in wake flow.
Physics of Fluids, 7, 1418-1424, 1995.
[3] De A.K. & Dalal A., Numerical simulation of unconfined flow past cylinder, International
Journal for Numerical Methods in Fluids, 52, 801-821, 2006.
[4] Ahusborde E. & Glockner S. An implicit method for the Navier-Stokes equations on
overlapping block-structured grids. Soumis à Int. J. Num. Meth. Fl.


101
4.3 Écoulement laminaire autour d’un obstacle fin (E,N)
4.3.1 Intérêt Les obstacles sont présents dans de nombreux écoulements et conduisent à des écoulements
complexes et fortement cisaillés. L‘écoulement autour d‘un obstacle fin de forme
rectangulaire a été peu étudié dans la littérature. Nous présentons ici une validation des
maillages multiblocs non-conformes sur ce type d‘écoulement.
4.3.2 Description La configuration expérimentale est présentée sur la figure 1. L‘écoulement a été étudié
expérimentalement par Carvalho [1]. Le nombre de Reynolds, basé sur la hauteur de
l‘obstacle et la vitesse moyenne axiale est de 82.5. Une recirculation apparaît derrière
l‘obstacle et quand le nombre de Reynolds augmente, une seconde recirculation apparaît sur
la paroi supérieure.
Figure 1. Configuration de l’écoulement autour d’un bloc fin
4.3.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues par la méthode de correction de pression. Les
conditions aux limites sont les suivantes :
Gauche : profil de Poiseuille pour u, zéro pour v.
Droite : condition de Neumann pour les 2 composantes
Inf et sup : adhérence
Un maillage composé de 3 blocs a été réalisé (cf. figure 2). Le bloc central, plus fin autour de
l‘obstacle, possède son interface avec le bloc de droite au niveau de la recirculation de
l‘écoulement. Le nombre d‘élément est de 131040.

102
Figure 2. Maillage et lignes de courant autour du bloc
4.3.4 Résultats et commentaires La figure 2 montre les lignes de courant de l‘écoulement. La figure 3 représente les profils de
la composante horizontale du vecteur vitesse à différentes positions x/S, mesurée [1] et
simulée avec Thétis [2].
Figure 3. Comparaison du profil de la composante horizontale du vecteur vitesse : Thétis (-)
et données expérimentales (◊)
Le tableau 1 compare les longueurs de recirculation. On peut observer des résultats
satisfaisants par rapport aux résultats expérimentaux excepté pour la longueur de recirculation
x2/S. Plusieurs auteurs [2,3,4] ont considéré cet écoulement numériquement pour valider leurs
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
y/H
x/S-6.8 -5.3 0 1.2 2.0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
y/H
x/s4 5 6 8.8

103
méthodes numériques mais ils ont uniquement comparé le profil de la composante horizontale
du vecteur vitesse et aucun n‘a mesuré les longueurs de recirculation. Par conséquent, on ne
peut pas réellement vérifier si la différence sur x2/S provient de notre calcul ou bien de la
mesure dans [1]. Néanmoins, les résultats en multibloc sont cohérents (voir tableau 1) avec
ceux obtenus sur un maillage fin monobloc résolu avec un couplage vitesse-pression différent
(lagrangien augmenté).
x1/S x2/S x3/S
Thétis 4.96 4.12 8.38
Thétis monobloc1800x200 4.99 4.01 9.19
Carvalho et al [1] 5.00 2.01 10.4
Tableau 1. Comparaison des longueurs de recirculation
4.3.5 Fichiers de données associés Le fichier de données associé à ce cas test est bloc2d_cpre_gbncf.don.
4.3.6 Références [1] Carvalho M.G., Durst F. & Pereira J.C., Predictions and measurements of laminar flow
over two-dimensional obstacles, Applied Mathematical Modelling, 11, 23-34, 1987.
[2] Song B., Liu G.R., Lam K.Y. & Amano R.S., On a higher-order bounded discretization
scheme, International Journal for Numerical Methods in Fluids, 32, 881-897, 2000.
[3] N'Dri D., Garon A. & Fortin A., Incompressible Navier-Stokes computations with stable
and stabilized space-time formulations: A comparative study, Communications in Numerical
Methods in Engineering, 18, 495-512, 2002.
[4] Rida S., Mckenty F., Meng F.L. & Reggio M., A staggered control volume scheme for
unstructured triangular grids,International Journal for Numerical Methods in Fluids, 25, 697-
717, 1997.
[5] Ahusborde E. & Glockner S. An implicit method for the Navier-Stokes equations on
overlapping block-structured grids. Soumis à International Journal for Numerical Methods in
Fluids.


105
4.4 Ecoulement laminaire autour d’un cylindre (E,N)
4.4.1 Intérêt
Ce cas permet une première évaluation de la capacité du code à prendre en compte des objets
à une échelle plus fine que celle du maillage par une méthode de pénalisation sous-maille [1].
4.4.2 Description
Un cylindre est immergé dans un domaine de grande taille. Pour un nombre de Reynolds
suffisant, deux recirculations stationnaires se forment en aval. La validation se fait par rapport
à la longueur de recirculation pour un Reynolds de 20. Il n‘existe pas de solution analytique
pour ce cas. Les résultats peuvent être comparés à des solutions expérimentales et numériques
[2]. Nous comparons aussi les solutions entre une méthode de pénalisation d‘ordre 1 en
espace [3], pour laquelle le contour de l‘obsacle est décrit par une ligne brisée, à une méthode
d‘ordre 2 en espace (méthode sous-maille [1]).
4.4.3 Modèles et méthodes numériques Equations de Navier-Stokes en incompressible monophasique
Lagrangien augmenté
Solveur direct ou itératif
Conditions initiales : u=1, v=0
Conditions limites :
-Gauche : u=2x10-5
, v=0
-Droite : neumann
-Haut et bas : glissement (u=2x10-5
; v=0)
3 maillages à pas constant : 200 x 100, 400 x 200 et 800 x 400
Le disque est associé au fichier cercle_5000.mxa.
La longueur de recirculation adimensionnée L/D est mesurée, avec L la longueur de
recirculation mesurée et D le diamètre du cylindre (voir Figure 1).
Figure 1 : Nomenclature des valeurs

106
Figure 2 : évolution spatio-temporelle de la longueur de recirculation adimensionnée en
fonction du maillage.
La figure 1 montre la convergence spatio-temporelle de la longueur de recirculation en
fonction du maillage. On remarque que cette longueur de recirculation adimensionnée par le
diamètre du cylindre est régulière après une centaine d'itérations temporelles et que lorsque le
maillage est raffiné, la valeur asymptotique obtenue tend vers 0.9. Les résultats de la
littérature donnent des valeurs légèrement supérieures à 0.9. Si l'on se réfère au tableau
suivant, on peut vérifier précisément cette observation.
Maillage Longueur de recirculation,
méthode sous-maille
Longueur de recirculation,
méthode d’ordre 1
200 x 100 0.768162 0.87305
400 x 200 0.860239 0.85088
800 x 400 0.880008 0.85887
Tableau 1 : longeur de recirculation
Concernant l'ordre de convergence en espace obtenu par la méthode de Richardson sur trois
points, une valeur de 2.22 est calculée pour la méthode sous-maille (il n‘est pas calculable
avec ces maillages pour la méthode d‘ordre 1). La figure suivante montre la prise en compte
sous-maille du contour de l‘obstacle (alors qu‘il aurait un contour crénelé avec la méthode
d‘ordre 1).
Nombre d'itérations de calcul
Lo
ng
ue
ur
de
recir
cu
latio
na
dim
en
sio
nn
ée
100 200 300 400 5000
0.2
0.4
0.6
0.8

107
Figure 3 : lignes de courant avecla méthode sous-maille.
On se propose maintenant d‘étudier les performances de ces deux méthodes pour un
domaine plus grand de dimensions [0 ;10]x[-4 ;4] pour une particule centrée en (0,0) de
diamètre D=0.1. Le maillage est à pas constant sur la zone [1.4 ;1.8]x[-0.1 ;0.1] maillée par
1024x512 cellules, et à pas exponentiel sur le reste du domaine. Le nombre de mailles est au
total de 1984x1152.
La Figure 3 indique les autres données mesurées, avec a la distance horizontale des centres
des tourbillons au cylindre, b l‘espace entre les deux centres des tourbillons, Cd le coefficient
de trainée et Theta l‘angle de décollement. Les Figures 3 et 4 montrent les résultats pour les
deux méthodes comparés à des résultats de la littérature (les références complètes sont dans
[4].
Figure 3 : résultats comparés pour la longueur de recirculation, les distances des centres des
vortex entre eux et par rapport au cylindre (VPM=méthode d’ordre 1 ; SMPM = méthode
d’ordre 2 sous-maille)
0.55
0.6
0.65
0.7
0.75
0.8
2
2.1
2.2
2.3
2.4
2.5
2.6
2.7
a/D
et
b/D
L/D
L/D
a/D
b/D

108
Figure 4 : résultats comparés pour le coefficient de trainée et l’angle de décollement
(VPM=méthode d’ordre 1 ; SMPM = méthode d’ordre 2 sous-maille)
On remarque que les deux méthodes donnent des résultats assez similaires et en bon accord
avec la littérature sur ce maillage plus dense. Les différences entre les méthodes d‘ordre 1 et 2
sont clairement moins nettes qu‘avec le maillage grossier, la zone autour du cylindre étant
maintenant fortement maillée.
4.4.4 Fichier de données
Le fichier est cylindre2d_psm.don pour la méthode sous-maille, cylindre2d_la.don pour la
méthode d‘ordre 1.
4.4.5 Bibliographie
[1] A. Sarthou, S. Vincent, P. Angot, JP. Caltagirone, The Sub-Mesh Penalty Method,
Proceedings of FVCA5 (2008) 633--640.
[2] Le B.V., Khoo B.C., Peraire J., An implicit-forcing immersed boundary method for
simulating viscous flows in irregular domains, Computer methods in applied mechanics and
engineering, vol. 220 (2007) p. 109-138.
[3] K. Khadra, P. Angot and S. Parneix and J.-P. Caltagirone, Fictitious domain approach for
numerical modelling of Navier-Stokes equations, International Journal for Numerical
Methods in Fluids 34 (2000) 651—684.
[4] A. Sarthou, Méthodes de domaines fictifs pour les équations elliptiques et de Navier-
Stokes. Application au couplage fluide-structure. Université de Bordeaux, 2009.
125.4
125.6
125.8
126
126.2
126.4
126.6
126.8
127
127.2
127.4
1.48
1.5
1.52
1.54
1.56
1.58
1.6
1.62
The
ta
Cd
Cd
Theta

109
4.5 Écoulement de la cavité entraînée 2D à Re=1000 (N)
4.5.1 Intérêt L‘écoulement dans une cavité carrée fermée dont la paroi supérieure est mobile est un test
classique qui a fait l‘objet de nombreuses études numériques depuis les premiers travaux de
Burggraf [1]. Ceux auxquels nous nous référons principalement sont ceux de Botella et Peyret
[3] basés sur la résolution des équations de Navier-Stokes par une méthode spectrale avec
traitement de la singularité de la cavité entraînée (discontinuité de la vitesse aux coins
supérieurs de la cavité). Leur article est un benchmark aux références nombreuses [2,4,5,6],
dont les principaux résultats sont donnés pour un nombre de Reynolds de 1000.
4.5.2 Description La paroi supérieure glisse (dans le sens des x négatifs ici) entraînant par viscosité le fluide. Il
en résulte la formation d‘un tourbillon principal qui occupe la majeure partie de la cavité. La
discontinuité au niveau des conditions aux limites supérieures entraîne des points de
surpression. Dans les coins inférieurs droit et gauche, des tourbillons secondaires et ternaires
apparaissent (cf. figures 1). La position des centres des tourbillons est donnée par les extrema
de la fonction courant.
L‘étude est réalisée sur un domaine carré de côté 1. Des conditions d‘adhérence sont
appliquées aux limites gauche, droite et inférieure. La paroi supérieure est entraînée à une
vitesse de glissement de -1m/s. La viscosité du fluide est calculée de façon à ce que le nombre
de Reynolds basé sur la longueur du côté de la cavité et la vitesse de glissement soit de 1000.
Figure 1. Structure tourbillonnaire de l’écoulement (tourbillons principaux, secondaires et
ternaires) obtenus avec un maillage multibloc non-conforme.
4.5.3 Modèles et méthodes numériques Nous avons utilisé les méthodes du lagrangien augmenté ou une méthode de correction de
pression pour la résolution du couplage vitesse/pression.
Des simulations ont été réalisées sur 5 maillages différents à variation du pas d‘espace par
polynôme de Chebichev (322, 64
2, 128
2, 256
2, 512
2) dont nous présentons maintenant les
résultats et leurs comparaisons aux références suscitées. Une étude sur des maillages
multiblocs non-conformes [7,8] a été aussi menée. Le maillage multibloc est composé de cinq
blocs non-conformes. Le premier bloc occupe la partie principale du domaine. Les blocs

110
supérieurs (inférieurs) ont un pas d‘espace deux fois (trois fois) plus fin que celui du bloc
principal. Le maillage a été raffiné dans les coins afin d‘avoir une meilleure description de
l‘écoulement. Le nombre total d‘éléments est de 121344.
Les critères de convergence aussi bien en stationnarité qu‘en incompressibilité sont compris
selon le maillage entre 10-13
et 10-15
. Le solveur direct MUMPS est utilisé en 2D et le
BiCGStab(2) en 3D.
4.5.4 Résultats et commentaires
Intensité du tourbillon principal
Les résultats sur l‘intensité du tourbillon principal et sur sa position sont présentés dans le
tableau 1. La convergence en espace, calculée sur la valeur de la fonction courant maximale et
à partir des 4 derniers maillages, est d‘ordre 2 (cf. figure 3). La valeur à convergence est égale
à 10-6
près à celle de Botella et Peyret.
Référence Maillage Fonction
courant
maximale
x z
Thétis 322
0.11313244 0.45099143 0.54900857
Thétis 642 0.1174566 0.47546616 0.57336524
Thétis 1282 0.11855697 0.47546616 0.56120534
Thétis 2562 0.11884602 0.46933963 0.56729035
Thétis 5122 0.11891404 0.46933963 0.56424906
Thétis Extrapolation 0.11893656 - -
Thétis-multibloc [8] 121344 ≈ 3482 0.11885 0.4687 0.5664
Botella & Peyret [3] 5122 N=64 0.1189365 0.4692 0.5652
Botella & Peyret [3] 5122 N=128 0.1189366 0.4692 0.5652
Schreiber et al. [6] 1412
0.11603 0.47143 0.56429
Schreiber et al. [6] Extrapolation 0.11894 - -
Ghia et al. [5] 1282 0.117929 0.4687 0.5625
Barragy et al. [2] 2562 0.118930 - -
Bruneau [4] 2562 0.1163 0.4687 0.5586
Tableau 1. Comparaison des intensités du tourbillon principal et de sa position (x,z)
Figure 3. Erreur sur la fonction courant max en fonction du maillage monobloc
0,0001
0,001
0,01
0,1
10 100 1000
Err
eu
r
N

111
Intensité des tourbillons secondaires
Les résultats sur l‘intensité des tourbillons secondaires gauche et droit et sur leurs positions
sont présentés dans les tableaux 2 et 3. Les résultats présents dans la littérature sont aussi
indiqués. Tout comme pour le tourbillon principal, nos résultats sont en très bon accord avec
ceux de Botella et Peyret ou de la littérature. L‘ordre de convergence calculé avec les 3
dernières valeurs de l‘intensité de la fonction courant est de 2.17 pour le tourbillon secondaire
gauche, et de 1.43 pour le tourbillon secondaire droit.
Référence Maillage Fct courant min x z
Thétis 322
-2.165316E-03 0.14644661 0.11349477
Thétis 642 -1.817451E-03 0.12952444 0.11349477
Thétis 1282 -1.749819E-03 0.13787646 0.11349477
Thétis 2562 -1.734488E-03 0.13787646 0.10963139
Thétis 5122 -1.731085E-03 0.1357678 0.11155577
Thétis Extrapolation -1.730101E-03 - -
Thétis-multibloc [8] 121344 ≈ 3482 -1.7285E-03 0.1354 0.1120
Botella & Peyret [3] 5122 N=64 -1.729687E-03 0.1360 0.1118
Botella & Peyret [3] 5122 N=128 -1.729717E-03 0.1360 0.1118
Schreiber et al. [6] 1412
-1.7E-03 0.13571 0.10714
Ghia et al. [5] 1282 -1.72102E-03 0.1406 0.1094
Bruneau [4] 2562 -1.91E-03 0.1289 0.1094
Tableau 2. Comparaison des intensités du tourbillon secondaire gauche et de sa position (x,z)
Référence Maillage Fct courant min x z
Thétis 322
-2.388253E-04 0.91573481 0.08426519
Thétis 642 -2.292304E-04 0.91573481 0.07113569
Thétis 1282 -2.333271E-04 0.91573481 0.07757322
Thétis 2562 -2.333760E-04 0.91573481 0.07757322
Thétis 5122 -2.333942E-04 0.91573481 0.07757322
Thétis Extrapolation -2.33395E-04 - -
Thétis-multibloc [8] 121344 ≈ 3482 -2.3469E-04 0.9166 0.0781
Botella & Peyret [3] 5122 N=64 -2.334531E-04 0.9167 0.0781
Botella & Peyret [3] 5122 N=128 -2.334528E-04 0.9167 0.0781
Schreiber et al. [6] 1412
-2.17E-04 0.91429 0.07143
Ghia et al. [5] 1282 -2.31129E-04 0.9141 0.0781
Bruneau [4] 2562 -3.25E-04 0.9141 0.0820
Tableau 3. Comparaison des intensités du tourbillon secondaire droit et de sa position (x,z)
Intensité des tourbillons ternaires
Grâce à l‘utilisation du maillage Chebychev, les tourbillons ternaires aux coins inférieurs
gauche et droit apparaissent dès le maillage 322 pour le droit et dès 64
2 pour le gauche.
L‘intensité des fonctions courant étant très faible (comme le montre le tableau suivant), il est
nécessaire d‘obtenir des résidus proches de la précision machine que nous obtenons grâce à

112
l‘utilisation d‘un solveur direct. L‘ordre de convergence calculé avec les 3 dernières valeurs
de l‘intensité de la fonction courant est de 1.19 pour le tourbillon secondaire gauche, et de
1.58 pour le tourbillon secondaire droit.
Référence Maillage Fct courant max x z
Thétis 322
3.41273E-08 0.00960736 0.00240764
Thétis 642 4.27667E-08 0.00960736 0.00541175
Thétis 1282 4.95312E-08 0.00736118 0.00736118
Thétis 2562 4.97434E-08 0.00736118 0.00736118
Thétis 5122 5.02278E-08 0.007894954 0.007361179
Thétis Extrapolation 5.04047E-08 - -
Thétis-multibloc [8] 121344 ≈ 3482 4.6742E-08 0.00757 0.00755
Botella & Peyret [3] 5122 N=64 5.88479E-08 0.00741 0.00799
Botella & Peyret [3] 5122 N=128 5.03992E-08 0.00768 0.00765
Ghia et al. [5] 1282 9.31929E-08 0.0078 0.0078
Tableau 4. Comparaison des intensités du tourbillon ternaire gauche et de sa position (x,z)
Référence Maillage Fct courant max x z
Thétis 322
- - -
Thétis 642 4.35855E-09 0.994588 0.00541175
Thétis 1282 5.72345E-09 0.994588 0.00376023
Thétis 2562 6.18821E-09 0.99545132 0.00454868
Thétis 5122 6.34419E-09 0.995029105 0.004970895
Thétis Extrapolation 6.42385E-09 - -
Thétis-multibloc [8] 121344 ≈ 3482 5.1435E-09 0.9953 0.00469
Botella & Peyret [3] 5122 N=64 2.08635E-08 0.99642 0.00452
Botella & Peyret [3] 5122 N=128 6.33255E-09 0.99510 0.00482
Bruneau [4] 1282 3.06E-09 0.9961 0.0039
Tableau 5. Comparaison des intensités du tourbillon ternaire droit et de sa position (x,z)
Profils de vitesse et de pression sur les axes x=0.5 et y=0.5
Les trois figures suivantes représentent les composantes de vitesse et la pression sur les axes
x=0.5 et y=0.5 en fonction du maillage avec les résultats de Botella et Peyret comme
référence. A partir d‘un maillage supérieur à 1282, les courbes se confondent pour la vitesse,
et à partir de 2562 pour la pression.

113
Figure 4. Profil de u sur l’axe x=0.5 et de w sur l’axe y=0.5 en fonction du maillage
Figure 5. Profil de la pression en fonction du maillage sur l’axe x=0.5
Figure 6. Profil de la pression en fonction du maillage sur l’axe y=0.5
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-1.0 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5u
z
u (x=0,5) B o te lla & P eyret
Aq . 32x32
Aq . 64x64
Aq . 128x128
w (y=0,5) B o te lla & P eyret
Aq . 32x32
Aq . 64x64
Aq . 512x512
0.0
0.2
0.4
0.6
0.8
1.0
1.2
-0 .02 0.00 0.02 0.04 0.06 0.08 0.10 0.12
P
Z
B otella & P eyret Aq . 32x32 Aq . 64x64 Aq . 128x128 Aq . 256x256
0.0
0.2
0.4
0.6
0.8
1.0
1.2
-0 .01 0.00 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
P
X
B o tella & P eyret Aq . 32x32 Aq . 64x64 Aq . 128x128 Aq . 256x256

114
4.5.5 Fichiers de données associés cavite2d_la.don et cavite2d_cpre.don pour le maillage monobloc
cavite2d_cpre_gbncf.don pour le maillage multibloc.
4.5.6 Références [1] Burggraf O. R., Analytical and numerical studies of the structure of the steady separated
flow, Jounal of Fluid Mechanics 24, 113-1511 1966.
[2] Barragy E. & Carey G.F., Stream function-vorticity driven cavity solution using p finite
elements, Computers and Fluids, 26, 453-468, 1997.
[3] Botella O. & Peyret R., Benchmark spectral results on the lid-driven cavity flow,
Computers & Fluids, 27, 421-433, 1988.
[4] Bruneau C.H. & Jouron C., An efficient scheme for solving steady incompressible Navier-
Stokes equations, Journal of Computational Physics, 89, 389-413, 1990.
[5] Ghia U., Ghia K.N. & Shin C.T., High-Re solutions for incompressible flow using the
Navier-Stokes equations and a multigrid method, Journal of Computational Physics, 48, 387-
411, 1982.
[6] Schreiber R. & Keller H.B., Driven cavity flow by efficient numerical techniques, Journal
of Computational Physics, 49, 310-333, 1983.
[7] Romé C., Glockner S. & Caltagirone J.P., Resolution of the Navier-Stokes equations on
block-structured meshes, International Journal for Numerical Methods in Fluids, 54 (10),
1239-1268, 2007.
[8] Ahusborde E. & Glockner S., An implicit method for the Navier-Stokes equations on
overlapping block-structured grids. Soumis à International Journal for Numerical Methods in
Fluids.

115
4.6 Écoulement de la double cavité entraînée (N)
4.6.1 Intérêt L‘étude de l‘écoulement dans une double cavité entraînée non rectangulaire a été récemment
proposée [1,2]. Cette configuration illustre l‘intérêt des maillages multiblocs conformes car la
géométrie n‘est pas rectangulaire. C‘est donc un cas de validation des équations de Navier-
Stokes 2D sur un maillage multibloc conforme, en parallèle comme en séquentiel. Le
partitionnement du maillage est aussi étudié.
4.6.2 Description La configuration est présentée figure 1. Les limites supérieures et inférieures entraînent
l‘écoulement dans des sens opposés. Ce problème a été proposé comme benchmark par [1].
Le nombre de Reynolds est basé sur la vitesse d‘entraînement et la longueur du grand côté est
notée L. L‘écoulement est stationnaire pour Re ≤ 1000. L‘écoulement a été étudié pour des
nombres de Reynolds de 50, 100, 400 et 1000. Pour Re=50 et Re=100, on note la présence de
2 tourbillons principaux et de 2 tourbillons secondaires (cf. figure 2). Pour Re=400 et
Re=1000, il existe un seul tourbillon principal et 4 tourbillons secondaires.
Figure 1. Configuration géométrique et conditions aux limites (d’après [2]).
4.6.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues par la méthode du lagrangien augmenté, un
schéma centré et avec le solveur direct MUMPS. Un maillage multibloc a été réalisé. Le
partitionnement du maillage est réalisé automatiquement en fonction du nombre de
processeurs [3].

116
(a) (b)
(c) (d)
Figure 2. Lignes de courant observées à Re=50 (a), Re=100 (b), Re=400 (c) et
Re=1000 (d), et composante verticale du vecteur vitesse.
4.6.4 Résultats et commentaires Dans un premier temps, nous analysons le partitionnement en fonction du nombre de
processeurs. Le maillage est constitué de 4 blocs conformes et de 411401 points. L‘objectif
est de répartir la charge sur un nombre quelconque de processeurs. Le tableau 1 montre une
bonne répartition entre chaque processeur, avec un écart à la charge idéale inférieur à 3% plus
faible que celui obtenu avec le partitionneur METIS [4]. La figure 3 montre quelques
exemples de partitionnements réalisés. Le partitionnement étant basé sur une approche par
bloc structuré, sa précision correspond à une ligne de maillage. Ainsi, quand le nombre de
processeurs augmente, il est normal que le déséquilibre augmente aussi (cela traduit le poids
relatif d‘une ligne de maillage sur la charge). La nature même de notre méthode explique les
différences avec METIS qui partitionne le graphe associé au maillage (ainsi, le nombre de
edge-cut, qui traduit le poids des communications entre processeurs, est aussi plus important).
Néanmoins le maillage obtenu donne accès à des solveurs multigrilles très rapides tirant partie
du caractère structuré par bloc du maillage partitionné, contrairement à celui obtenu avec
METIS qui demande l‘utilisation de solveurs multigrilles algébriques dédiés aux maillages
non-structurés.
Les positions des tourbillons principaux et secondaires ainsi que les valeurs du rotationnel du
vecteur vitesse en leurs centres sont comparées à celles de la littérature [1,2]. Les profils de la
composante horizontale du vecteur vitesse sur l‘axe médian horizontal, et ceux de la
composante verticale sur l‘axe médian vertical sont tracés figure 4 pour Re=1000. On observe

117
un bon accord de nos résultats avec ceux de [1] et [2]. Les valeurs du rotationnel sont relevées
avec Tecplot par interpolation, ce qui peut expliquer une légère dissymétrie dans les valeurs
(observée aussi par les autres auteurs). Une analyse de convergence en espace sera réalisée
dans le prochain cahier de validation.
Processeurs 8 16 32 64
Nombre de points / proc 51426 25714 12857 6416
Ecart à la charge idéale (%) Thétis 0.54 0.44 1.40 2.87
Ecart à la charge idéale (%) METIS 1.54 2.28 3.17 3.28
Edge-cut Thétis 2829 4584 7513 11360
Edge-cut METIS 3230 4853 7507 11172
Temps (s) Thétis 0.11 0.16 0.13 0.16
Temps (s) METIS 0.28 0.30 0.29 0.30
Tableau 1. Analyse du partitionnement.
(a) (b)
(c) (d)
Figure 3. Partitionnements obtenus avec 8 (a), 16 (b), 32 (c) et 64 (d) processeurs (1 couleur
par processeur).

118
Thétis (x,y) Thétis
w(x,y)
Zhou (x,y) Zhou
w(x,y)
Nithiarasu
(x,y)
Nithiarasu
w(x,y)
Re=50 (0.975702,1.14735)
(0.424304,0.252659)
-3.04164
-3.04154
(0.9781,1.1600)
(0.4219,0.2518)
-3.05843
-3.05670
(0.9776,1.1478)
(0.4263,0.2473)
-3.07633
-3.10055
Re=100 (1.0130,1.1096)
(0.3870,0.2904)
-2.7034
-2.70333
(1.0172,1.1091)
(0.3828,0.2889)
-2.72390
-2.72310
(1.0114,1.1035)
(0.3865,0.2894)
-2.69993
-2.73231
Re=400 (0.7000,0.7000) -1.56486 (0.7000,0.7000) -1.54842 (0.6995,0.6966) -1.60552
Re=1000 (0.7000,0.7000) -1.45781 (0.7000,0.7000) -1.41562 (0.6895,0.6969) -1.52363
Tableau 1. Valeurs du rotationnel et position des centres des tourbillons primaires.
Thétis (x,y) Thétis
w(x,y)
Zhou (x,y) Zhou
w(x,y)
Nithiarasu
(x,y)
Nithiarasu
w(x,y)
Re=50 (1.35584,0.444386)
(0.0441571,0.955611)
0.0284038
0.0284075
(1.3556,0.4405)
(0.0444,0.9595)
0.02395
0.02394
(1.3566,0.4446)
(0.0424,0.9569)
0.02786
0.02587
Re=100 (1.3562,0.4450)
(0.0438,0.9551)
0.0400146
0.0399811
(1.3556,0.4486)
(0.0444,0.9514)
0.04399
0.04401
(1.3566,0.4446)
(0.0424,0.9569)
0.03975
0.03695
Re=400 (1.34632,0.463339)
(0.0536722,0.936675)
0.180384
0.180274
(1.3500,0.4656)
(0.0500,0.9344)
0.15569
0.15777
(1.3483,0.4688)
(0.0569,0.9400)
0.19767
0.19385
Re=1000 (1.3234,0.4832)
(0.0766,0.9168)
0.59204
0.59161
(1.3250,0.4844)
(0.0750,0.9063)
0.53846
0.53813
(1.3221,0.4836)
(0.0753,0.9142)
0.65005
0.63326
Tableau 2. Valeurs du rotationnel et position des centres des premiers tourbillons secondaire.
Thétis (x,y) Thétis
w(x,y)
Zhou (x,y) Zhou
w(x,y)
Nithiarasu
(x,y)
Nithiarasu
w(x,y)
Re=400 (0.927173,0.237925)
(0.472821,1.16208)
1.51342
1.51323
(0.4703,1.1625)
(0.9219,0.2375)
1.38495
1.38140
(0.4772,1.1610)
(0.9232,0.2385)
1.70971
1.69442
Re=1000 (0.5491,1.2033)
(0.8510,0.1968)
2.51069
2.50993
(0.5484,1.2000)
(0.7256,0.2000)
2.38557
2.38559
(0.5505,1.2071)
(0.8523,0.2015)
2.73409
2.60588
Tableau 3. Valeurs du rotationnel et position des centres des seconds tourbillons secondaire.
Figure 4. Profils comparés à Re=1000 de u en x=0.7 et v en y=0.7.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
Zhou u (x=0.7)
Zhou v (y=0.7)
Thétis u (x=0.7)
Thétis v (y=0.7)

119
4.6.5 Fichiers de données associés Le fichier de données associé à ce cas test est doublecavite2d_pw.don.
4.6.6 Références [1] Y.C. Zhou, B.S.V. Patnaik, D.C. Wan & G.W. Wei, DSC solution for flow in a staggered
double lid driven cavity, International Journal for Numerical Methods in Fluids, 57, 211-234,
2003.
[2] P. Nithiarasu & C.-B. Liu, Steady and unsteady incompressible flow in a double driven
cavity using the artificial compressibility (AC)-based characteristic-based split (CBS) scheme,
International Journal for Numerical Methods in Fluids, 63, 380-397, 2005.
[3] E. Ahusborde, S. Glockner. Article en cours de rédaction.
[4] http://glaros.dtc.umn.edu/gkhome/views/metis


121
4.7 Écoulement de la cavité entraînée en forme de L (N)
4.7.1 Intérêt L‘écoulement dans une cavité entraînée en forme de L a été étudié dans [1] et [2]. Cette
configuration illustre l‘intérêt des maillages multiblocs conformes car la géométrie n‘est pas
rectangulaire. C‘est donc un cas de validation des équations de Navier-Stokes 2D sur un
maillage multibloc conforme, en parallèle comme en séquentiel. Le partitionnement du
maillage est aussi étudié.
4.7.2 Description La configuration est présentée figure 1. La limite supérieure entraîne l‘écoulement. Ce
problème a été proposé comme benchmark par [2]. Le nombre de Reynolds est basé sur la
vitesse d‘entraînement et la longueur du grand côté L. L‘écoulement a été étudié pour des
nombres de Reynolds de 1000, 3200, 5000, 7500 et 10000. La présence d‘une marche dans la
géométrie conduit à un écoulement composé de 3 tourbillons principaux, 2 dans la partie
supérieure et 1 dans la partie inférieure (cf. figure 1). Le plus important se situe dans la partie
supérieure droite de la cavité. Des tourbillons contrarotatifs, dont la taille augmente avec le
nombre de Reynolds, apparaissent dans les coins de la cavité (cf. figure 2).
Figure 1. Configuration géométrique et conditions aux limites (d’après [2])
4.7.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues par la méthode du lagrangien augmenté, un
schéma centré et avec le solveur direct MUMPS. Un maillage multibloc a été réalisé. Le
partitionnement du maillage est réalisé automatiquement en fonction du nombre de
processeurs [3].

122
Figure 2. Lignes de courant (et composante verticale du vecteur vitesse) – colonne de gauche
- et isolignes de vorticité observées – colonne de droite - pour Re=1000 (a), Re=3200 (b),
Re=5000 (c) et Re=7500 (d) .

123
4.7.4 Résultats et commentaires Dans un premier temps, nous analysons le partitionnement en fonction du nombre de
processeurs. Le maillage est constitué de 3 blocs conformes et de 119600 points. L‘objectif
est de répartir la charge sur un nombre quelconque de processeurs. Le tableau 1 montre une
bonne répartition entre chaque processeur, avec un écart à la charge idéale inférieur à 2% plus
faible que celui obtenu avec le partitionneur METIS [4]. La figure 3 montre quelques
exemples de partitionnements réalisés. Le partitionnement étant basé sur une approche par
bloc structuré, sa précision correspond à une ligne de maillage. Ainsi, quand le nombre de
processeurs augmente, il est normal que le déséquilibre augmente aussi (cela traduit le poids
relatif d‘une ligne de maillage sur la charge). La nature même de notre méthode explique les
différences avec METIS qui partitionne le graphe associé au maillage (ainsi, le nombre de
edge-cut, qui traduit le poids des communications entre processeurs, est aussi plus important).
Néanmoins le maillage obtenu donne accès à des solveurs multigrilles très rapides tirant partie
du caractère structuré par bloc du maillage partitionné, contrairement à celui obtenu avec
METIS qui demande l‘utilisation de solveurs multigrilles algébriques dédiés aux maillages
non-structurés.
Processeurs 8 16 32
Nombre de points / proc 14950 7475 3738
Ecart à la charge idéale (%) Thétis 1.00 1.91 1.93
Ecart à la charge idéale (%) METIS 2.30 3.07 3.58
Edge-cut Thétis 1467 2348 3616
Edge-cut METIS 1574 2656 4031
Temps (s) Thétis 0.004 0.004 0.004
Temps (s) METIS 0.060 0.064 0.068
Tableau 1. Analyse du partitionnement.
La figure 4 reprend les lignes de courant et les isolignes de la vorticité de [2]. Elles sont en
accord avec celles de la figure 2. Plus précisément, les profils des composantes u et v du
vecteur vitesse sont tracés et comparés figure 5 pour Re=1000 et Re=7500. Une analyse de
convergence en espace sera réalisée dans le prochain cahier de validation. Les intensités et
positions des tourbillons ne sont pas mesurées dans la littérature ([2] ne fournit que la fonction
courant à Re=3200).

124
(a) (b)
(c)
Figure 3. Partitionnements obtenus avec 8 (a), 16 (b) et 32 (b) processeurs (1 couleur par
processeur).
(a) (b)
(c) (d)
Figure 4. Lignes de courant et isolignes de vorticité observées par [1] à Re=1000 (a),
Re=3200 (b), Re=5000 (c) et Re=7500 (d).

125
(a) (b)
(c) (d)
Figure 5. Comparaison des profils de u en x=0.75 (a et b), et des profils de v en y=0.74 (c et
d) pour Re=1000 et Re=7400
4.7.5 Fichiers de données associés Le fichier de données associé à ce cas test est cavite2dL_pw.don.
4.7.6 Références [1] C.Y. Perng & L. Street, A coupled multigrid-domain-splitting technique for simulating
incompressible flows in geometrically complex domains, , International Journal for
Numerical Methods in Fluids, 13, 269-286, 1991.
[2] L. Hribersek & L. Skerget, Boundary domain integral method for high Reynolds viscous
fluid flows in complex planar geometries, Comput. Methods Appl. Engrg., 194, 4196-4220,
2005.
[3] E. Ahusborde, S. Glockner. Article en cours de rédaction.
[4] http://glaros.dtc.umn.edu/gkhome/views/metis
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-0.5 -0.25 0 0.25 0.5 0.75 1
Hribersek Re=1000
Thétis Re=1000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
Hribersek Re=7500
Thétis Re=7500
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Hribersek Re=1000
Thétis Re=1000
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
Hribersek Re=7500
Thétis Re=7500


127
4.8 Écoulement dans un canal en forme de Z (N)
4.8.1 Intérêt L‘écoulement dans canal en forme de Z a été étudié dans [1] et [2]. Cette configuration
illustre l‘intérêt des maillages multiblocs conformes car la géométrie n‘est pas rectangulaire.
C‘est donc un cas de validation des équations de Navier-Stokes 2D sur un maillage multibloc
conforme, en parallèle comme en séquentiel. Le partitionnement du maillage est aussi étudié.
4.8.2 Description La configuration est présentée figure 1. La géométrie est en forme de Z. Le canal comporte un
brusque élargissement puis un brusque rétrécissement de section (d‘un facteur 2), associés à
des changements de direction de 90°. Le nombre de Reynolds est basé sur la hauteur du canal
et la vitesse moyenne du canal en entrée. Un profil de Poiseuille est imposé en entrée, une
condition de Neumann en sortie, et des parois sur les autres conditions aux limites. Les
nombres de Reynolds de 100, 200 et 400 sont utilisés par [2]. Pour Re=100 et Re=200, trois
recirculations principales sont formées, la première dans le coin supérieur droit, la seconde le
long de la paroi gauche de la section verticale, la troisième sous la limite supérieure dans la
seconde zone contractée (cf. figure 2). Pour Re=400, l‘écoulement dans la section verticale est
composé maintenant de 3 recirculations, et, dans la seconde section horizontale, une seconde
recirculation apparait le long de la paroi inférieure. La longueur du domaine est identique à
celle choisie par [1] et [2], bien que pour Re=400, le domaine semble un peu court et conduit
certainement à une légère perturbation de l‘écoulement en amont de la condition limite de
sortie, ce dernier ne pouvant ré-établir pleinement. Il faut noter que [1] définit le nombre de
Reylnolds à partir de la vitesse moyenne umoy, alors que [2] à partir de la vitesse max
(umax=1.5umoy). Enfin, [1] n‘a étudié que Reu_max=200.
Figure 1. Configuration géométrique
4.8.3 Modèles et méthodes numériques Les équations de Navier-Stokes sont résolues par la méthode du lagrangien augmenté, un
schéma centré et avec le solveur direct MUMPS. Un maillage multibloc a été réalisé. Le
partitionnement du maillage est réalisé automatiquement en fonction du nombre de
processeurs [3].
(2,0)
(14,1)
(4,5.625)
(0,4.625)

128
Figure 2. Fonction courant pour Re=100, Re=200 et Re=400, contours de pression.
4.8.4 Résultats et commentaires Dans un premier temps, nous analysons le partitionnement en fonction du nombre de
processeurs. Le maillage est constitué de 3 blocs conformes et de 599625 points. L‘objectif
est de répartir la charge sur un nombre quelconque de processeurs. Le tableau 1 montre une
bonne répartition entre chaque processeur, avec un écart à la charge idéale inférieur à 3% plus
faible que celui obtenu avec le partitionneur METIS [4]. La figure 3 montre quelques
exemples de partitionnements réalisés. Le partitionnement étant basé sur une approche par
bloc structuré, sa précision correspond à une ligne de maillage. Ainsi, quand le nombre de
processeurs augmente, il est normal que le déséquilibre augmente aussi (cela traduit le poids
relatif d‘une ligne de maillage sur la charge). La nature même de notre méthode explique les
différences avec METIS qui partitionne le graphe associé au maillage (ainsi, le nombre de
edge-cut, qui traduit le poids des communications entre processeurs, est aussi plus important).
Néanmoins le maillage obtenu donne accès à des solveurs multigrilles très rapides tirant partie
du caractère structuré par bloc du maillage partitionné, contrairement à celui obtenu avec
METIS qui demande l‘utilisation de solveurs multigrilles dédiés algébriques aux maillages
non-structurés.

129
Processeurs 8 16 32 64
Nombre de points / proc 63181 31592 15796 7899
Ecart max à la charge idéale (%) Thétis 0.21 0.64 0.96
Ecart max à la charge idéale (%) METIS 1.69 2.59
3.18
Edge-cut Thétis 2016 3692 6351
Edge-cut METIS 2247 4055 7096
Temps (s) Thétis 0.02 0.016 0.016
Temps (s) METIS 0.43 0.44 0.46
Tableau 1. Analyse du partitionnement.
(a) (b)
(c) (d)
Figure 3. Partitionnements obtenus avec 8 (a), 16 (b), 32 (c) et 64 (d) processeurs (1 couleur
par processeur).
La figure 4 reprend les fonctions courant obtenues par [2]. On observe un bon accord
qualitatif. Néanmoins, nous observons, contrairement à [2], une recirculation supplémentaire
dans la section verticale en raison pensons-nous de la finesse de notre maillage. Enfin, nous
comparons sur la figure 5 les profils de vitesse obtenus par [1] à Reu_max=200 en 3 abscisses.
A noter une légère différence en x=9 pour lequel l‘écoulement de Poseuille se rétablit plus
vite pour Perng [1].
Figure 4. Lignes de courant obtenues par [2] pour Re=200 et Re=400.

130
Figure 4. Comparaison des profils de u en x=0, x=2, x=4.8 et x=9.
4.8.5 Fichiers de données associés Le fichier de données associé à ce cas test est canalZ_pw.don.
4.8.6 Références [1] C.Y. Perng & L. Street, A coupled multigrid-domain-splitting technique for simulating
incompressible flows in geometrically complex domains, , International Journal for
Numerical Methods in Fluids, 13, 269-286, 1991.
[2] L. Hribersek & L. Skerget, Boundary domain integral method for high Reynolds viscous
fluid flows in complex planar geometries, Comput. Methods Appl. Engrg., 194, 4196-4220,
2005.
[3] E. Ahusborde, S. Glockner. Article en cours de rédaction.
[4] http://glaros.dtc.umn.edu/gkhome/views/metis
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-0.2 -0.1 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5
y (
m)
u/u_max (m.s-1)
Thétis x=0
Thétis x=2
Thétis x=4.8
Thétis x=9
Perng x=0 et x=9
Perng x=2
Perng x=4.8

131
5 Écoulement isothermes monophasiques turbulents


133
5.1 Écoulement turbulent dans un canal plan 2D à Re=5100 (N)
5.1.1 Intérêt Il s‘agit d‘étudier ici l‘écoulement turbulent isotherme bidimensionnel entre deux plans
parallèles semi infinis dans la direction transversale. Nous comparerons les solutions des
modèles k-, RNG, v2-f et LES à des résultats issus de DNS [1] établis pour une turbulence
pleinement développée, à savoir n‘évoluant plus en moyenne longitudinalement et
temporellement. L‘intérêt de ce cas académique est d‘une part de valider les modèles de
turbulence, les schémas numériques, des conditions limites périodiques, etc.
5.1.2 Description Nous nous basons sur les travaux de Kim, Moin et Moser [1] qui ont effectué, pour un nombre
de Reynolds de 5600, une simulation directe de toutes les échelles de la turbulence. Les
conditions aux limites sont périodiques suivant les axes longitudinal et transversal, une
adhérence étant imposée aux limites supérieure et inférieure. Les valeurs de référence sont le
nombre de Reynolds moyen (5600), ReC le nombre de Reynolds basé sur la vitesse moyenne
au centre du canal (ReC=3300), Reτ le nombre de Reynolds basé sur la vitesse moyenne de
frottement (Reτ=180), uτ la vitesse moyenne de frottement (uτ=6.398 10-2
m.s-1
), Cf le
coefficient moyen de frottement (Cf=8.18 10-3
). Expérimentalement [2], le coefficient de
frottement a été mesuré à 8.44 10-3
.
5.1.3 Choix des modèles et méthodes numériques Pour les modèles RANS, les simulations sont faites en 2D. Le couplage vitesse/pression est
résolu par la méthode du lagrangien augmenté. Un canal très long est utilisé afin d‘obtenir en
sortie une turbulence pleinement développée (pour le modèle v2-f, il a fallu procéder en 2
étapes, à savoir découper le domaine en 2, récupérer les profils de sortie et les utiliser comme
condition d‘entrée de la seconde étape). Le maillage est à pas constant. Le solveur direct
MUMPS est utilisé, ces cas tournent en séquentiel comme en parallèle.
Pour les modèles LES (mixte, Smagorinsky, Smagorinsky dynamique) les simulations sont
réalisées en 3D. Le couplage vitesse/pression est résolu par la méthode du lagrangien
augmenté. La taille du canal est celle utilisée dans [1], avec les mêmes conditions aux limites.
L‘écoulement est initialisé par un écoulement de Poiseuille perturbé par des ondes de
Tollmein-Schlichting. L‘écoulement est forcé par un terme source afin de conserver le débit
dans le canal. L‘écoulement initialement perturbé doit d‘abord converger vers un état
turbulent avant de pouvoir activer les modèles LES. Ce processus est assez long à mettre en
place. Dans le cadre de la validation, nous avons récupéré les champs de vitesse et de pression
à un instant donné de simulations pour lequel la turbulence était déjà établie. Le post-
traitement des données nécessite que les moyennes temporelles convergent vers un état
stationnaire (ce qui nécessiterait de laisser tourner la simulation quelques centaines de milliers
d‘itérations). Le maillage (64x68x64) est constant suivant les axes longitudinal et transversal,
tandis qu‘une variation en tangente hyperbolique est utilisée pour la direction verticale. Le
solveur BiCGStab(2) avec un préconditionnement ILU est utilisé. Le cas ne tourne qu‘en
séquentiel.

134
Le modèle de Smagorinsky n‘est pas couplé à des lois de parois qui permettrait de palier à ses
défauts [3].
5.1.4 Résultats et commentaires Pour ce nombre de Reynolds, l‘écoulement pleinement développé ne s‘établit que pour une
très grande longueur du canal à savoir 600 fois sa hauteur. A partir des 2/3 de sa longueur,
l‘écoulement est invariant longitudinalement. Les maillages utilisés ont tous 16 mailles à pas
constant selon la longueur. Selon la hauteur, le nombre de mailles à pas constant varie de 32 à
256. Pour les modèles k- et RNG, un profil plat a été mis comme condition d‘entrée pour
toutes les variables. Pour le modèle v2-f, l‘extrême platitude des mailles à conduit à des
difficultés de convergence et il a fallu réduire dans un premier temps la longueur du canal à
10 fois sa hauteur et récupérer les profils des différentes variables à la sortie pour les injecter
en condition d‘entrée du canal long.
Pour l‘ensemble des simulations effectuées, les résidus des équations sont compris entre 10-13
et 10-15
selon les maillages. Il en est de même pour la divergence et la stationnarité de
l‘écoulement. La turbulence est quant à elle pleinement développée à 10-11
près.
Résultats sur la vitesse
Les profils de la composante horizontale de la vitesse sont représentés de la figure 1 à la
figure 5. On peut observer la convergence en maillage pour les trois modèles et noter que le
modèle v2-f est le plus proche des résultats de la DNS, aussi bien à proximité de la paroi qu‘au
centre du canal. Ceci est d‘autant plus flagrant sur la figure donnant u+ en fonction de y+ où
l‘on peut observer l‘excellent comportement du v2-f dans la sous-couche visqueuse avec
ensuite un léger décalage par rapport à la DNS mais vérifiant tout de même un profil
logarithmique à partir de y+=30.
Les résultats décevants des modèles k- s‘expliquent du fait que la loi de paroi liant à
l‘énergie cinétique turbulente n‘est valable que dans la couche logarithmique. Hors, pour
placer le premier point du maillage dans cette zone de l‘écoulement, il est nécessaire de
disposer d‘une loi de paroi pour la vitesse, fonctionnalité dont Thétis ne dispose pas encore.
Une autre solution consiste à faire évoluer le modèle k- vers un modèle bicouche avec des
lois d‘amortissement sous la couche logarithmique afin de prendre en compte correctement la
diminution puis l‘annulation de la turbulence dans cette zone.

135
Figure 1. Profil de la composante horizontale de la vitesse obtenu avec le modèle k- pour
différents maillages
Figure 2. Profil de la composante horizontale de la vitesse obtenu avec le modèle RNG pour
différents maillages
Figure 3. Profil de la composante horizontale de la vitesse obtenu avec le modèle v2-f pour
différents maillages
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
0,00 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 1,00
Y/delta
U/U
mo
y
D NS k-e 256 k-e 128 k-e 64 k-e 32
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
0,00 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 1,00
Y/delta
U/U
mo
y
D NS RNG 256 RNG 128 RNG 64 RNG 32
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
0,00 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 1,00
Y/delta
U/U
mo
y
D NS v2-f 256 v2-f 128 v2-f 64 v2-f 32

136
Figure 4. Profils de la composante horizontale de la vitesse pour les trois modèles de
turbulence
Figure 5. Profils de la composante horizontale de la vitesse u+ en fonction de y+ pour les trois
modèles de turbulence pour un maillage 16x256
Nous comparons maintenant dans le tableau suivant les valeurs obtenues avec Thétis des
coefficients de frottement, le rapport de la vitesse au centre du canal sur la vitesse moyenne
pour un maillage de 16x256 à ceux de la DNS de Kim et al., ainsi qu‘aux corrélations
expérimentale de Dean [2]. Figurent également dans le tableau les valeurs du y+ de la
première maille fluide.
Le coefficient de frottement est défini par Cf = 2w/Um2 ou w est la contrainte à la paroi et
Um la vitesse moyenne adimensionnée et u par la vitesse de frottement.
Kim et al. v2-f RNG k- LES
y+
32 : 11.13968
64 : 5.549001
128 : 2.649040
256 : 1.311220
32 : 12.04145256
64 : 6.91616065
128 : 3.82540709
256 : 2.07049648
32 : 12.256682
64 : 7.0194166
128 : 3.9177708
256 : 2.1395238
mixte : 1
smago : 1
smago dyn :1
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1,0
1,1
1,2
1,3
0,00 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 1,00
Y/delta
U/U
mo
y
D NS RNG 256 k-e 256 v2-f 256
0
2
4
6
8
10
12
14
16
18
20
0,0 0,1 1,0 10,0 100,0
Y+
U+
D NS k-e 256 RNG 256 v2-f 256 u+=y+ u+=2,5 ln(y+)+5,5

137
u
6.398 10-2
32 : 6.365529E-2
64 : 6.341715E-2
128 : 6.054949E-2
256 : 5.994149E-2
32 : 6.880830E-2
64 : 7.904183E-2
128 : 8.743787E-2
256 : 9.465126E-2
32 : 7.003819E-2
64 : 8.022190E-2
128 : 8.954905E-2
256 : 9.780680E-2
mixte : 6.63 10-2
smago : 7.07 10-2
smago dyn : 6 10-2
𝑼𝒎
𝒖
15.63
32 : 15.218697
64 : 15.522220
128 : 16.386386
256 : 16.617765
32 : 14.518937
64 : 12.648439
128 : 11.435993
256 : 10.564937
32 : 14.2639819
64 : 12.4623799
128 : 11.1663828
256 : 10.2240814
mixte : 15.02
smago : 14.08
smago dyn : 16.6
𝐔𝐜
𝐔𝐦
1.16 32 : 1.136773
64 : 1.142887
128 : 1.150002
256 : 1.153923
32 : 1.223402
64 : 1.219906
128 : 1.221323
256 : 1.224681
32 : 1.2092273
64 : 1.2063647
128 : 1.2070362
256 : 1.2102769
mixte : 1.12
smago : 1.13
smago dyn : 1.11
Cf 8.18 10-3
32 : 8.103992E-3
64 : 8.043470E-3
128 : 7.332482E-3
256 : 7.185965E-3
32 : 9.4691643E-3
64 : 1.2495223E-2
128 : 1.529076E-2
256 : 1.791772E-2
32 : 9.810695E-3
64 : 1.287110E-2
128 : 1.603806E-2
256 : 1.913234E-2
mixte : 8.8 10-3
smago : 1 10-2
smago dyn : 7.5 10-3
Tableau 1. Différents paramètres de l’écoulement en fonction des maillages et des modèles
Résultats sur l’énergie cinétique turbulente moyenne
Les profils de l‘énergie cinétique turbulente moyenne sont représentés de la figure 6 à la
figure 9. Sa surestimation par les modèles k- et RNG est évidente et la convergence en
maillage sur cette quantité difficile à vérifier (cf. explication précédente sur les causes). Par
contre, le comportement du modèle v2-f est bien meilleur puisqu‘il est prévu pour modéliser la
sous couche visqueuse, et les résultats proches de ceux de la DNS.
Figure 6. Profil de l’énergie cinétique turbulente pour le modèle k- et pour différents
maillages
0,000
0,005
0,010
0,015
0,020
0,025
0,030
0,035
0,040
0,045
0,050
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
D NS k-e 64 k-e 32 k-e 128 k-e 256

138
Figure 7. Profil de l’énergie cinétique turbulente pour le modèle RNG et pour différents
maillages
Figure 8. Profil de l’énergie cinétique turbulente pour le modèle v2-f et pour différents
maillages
figure 9. Profil de l’énergie cinétique turbulente pour les trois modèles de turbulence pourun
maillage 16x256
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.045
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
DNS RNG 128 RNG 64 RNG 256 RNG 32
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
DNS v2-f 256 v2-f 128 v2-f 64 v2-f 32
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
DNS v2-f 256 k-e 256 RNG 256

139
Remarque
Nous avons par ailleurs modélisé le canal dans sa totalité avec des parois inférieure et
supérieure et vérifié que l‘écoulement est parfaitement symétrique. D‘autre part, pour un
maillage de 16x128, des calculs ont été lancés avec les trois modèles de turbulence sur un
demi-canal (condition de symétrie sur la limite supérieure) et ont strictement donnés les
mêmes résultats qu‘avec un maillage complet. Enfin pour ce maillage, toutes les autres
configurations ont été testées, à savoir une entrée par la limite droite, un canal d‘axe Oz, avec
symétrie ou non, etc. et ont donné là aussi les mêmes résultats.
Conclusion
Pour l‘écoulement entre deux plans à Re=5600, seul le modèle v2-f fournit des résultats
vraiment satisfaisants aussi bien dans la zone proche paroi que dans le cœur de l‘écoulement.
Le comportement des deux autres modèles montre la nécessité de mettre en place une loi de
paroi sur la vitesse et/ou de faire évoluer ces modèles vers des modèles bicouches avec des
fonctions d‘amortissement près des parois.
5.1.5 Fichiers de données associés canaltur2d_la_ke.don
canaltur2d_la_rng.don
canaltur2d_la_v2f.don
5.1.6 Références [1] Kim J., Moin P., Moser R. (1986). Turbulence statistics in fully developed channel flow at
low Reynolds number, J. Fluid Mech. Vol. 177, pp. 133-166.
[2] Dean R.B. (1978). Reynolds number dependence of skin friction and other bulk flow
variables in two-dimensional rectangular duct flow, Trans. ASME I : J. Fluids Engng, 100,
215.
[3] Lubin, P., 2004. Simulation des Grandes Échelles appliquée au déferlement plongeant des
vagues, Thèse de doctorat de l‘Université Bordeaux 1, Spécialité Mécanique.


141
5.2 Écoulement turbulent autour d’une marche descendante à
Re=5100 (E,N)
5.2.1 Intérêt La simulation numérique au-dessus d‘une marche descendante est un cas test fréquemment
rencontré lors de la validation des codes de calcul, et ce pour deux raisons principales : d‘une
part, l‘écoulement est complexe en raison de la présence de forts cisaillements et d‘une
recirculation, et d‘autre part, de nombreux résultats expérimentaux (Driver & Seegmiller [1],
Dumoulin [2], Kim [3], Moss & Baker [5]) et numériques sont disponibles. Nous validons ici
les modèles de turbulence RANS k-ε, RNG et v2-f.
5.2.2 Description La configuration géométrique est celle d‘un canal plan auquel a été rajoutée en amont une
marche (cf. figure 1). Le fluide est soumis à un brusque élargissement où l‘écoulement se
sépare en deux en raison d‘un gradient de pression inverse. Derrière le saut de section se
forme une zone de recirculation où l‘écoulement se referme pour revenir vers la marche et
former ainsi un tourbillon. Elle prend fin au point de recollement à partir duquel la couche
limite se redéveloppe. À noter la présence au pied de la marche d‘une seconde recirculation
(de sens de rotation opposé à la première) qui n‘est pas toujours mise en évidence à la fois par
les codes de calcul et par les mesures expérimentales.
Il a été établi que pour un rapport profondeur/hauteur de marche supérieur à 10 (cas de
l‘étude), l‘écoulement est en moyenne bidimensionnel [2].
Nous nous appuierons, dans la présente étude, sur la simulation directe DNS bas Reynolds
(ReH=5100) de Le, Moin et Kim [4]
Figure 1. Structure d’un écoulement derrière une marche
5.2.3 Modèles et méthodes numériques Les profils DNS serviront à établir les profils d‘entrée pour la vitesse, l‘énergie cinétique
turbulente, ε et v2. Le maillage est à variation exponentielle du pas dans les deux directions de
l‘espace, avec un resserrement près de chaque paroi (paroi inférieure, parties horizontale et
verticale de la marche). Un profil turbulent pleinement développé est placé en entrée à 4H en
amont du pied de la marche. Une condition de symétrie est placée sur la condition supérieure
du domaine, une condition de Neumann en sortie et une adhérence sur la paroi inférieure.
Nous avons utilisé un schéma upwind ou hybride pour les équations de Navier-Stokes et un
schéma hybride pour la turbulence. Les résultats présentés ci-dessous correspondent à des
convergences en stationnarité et en incompressibilité inférieures à 10-13
. Différentes
Hd
H
xr
Umoy

142
configurations ont été testées et fournissent les mêmes résultats à la précision machine près
(marche en haut, à gauche, écoulement selon Oz, écoulement 3D avec conditions de symétrie
ou périodique, etc.)
5.2.4 Résultats et commentaires Le tableau suivant montre la longueur de la recirculation principale obtenue avec les
différents modèles pour trois maillages, valeurs qui sont à comparer avec la valeur DNS de
6.39 H. On remarque les insuffisances classiques du modèle k-ε (de l‘ordre de 20%),
nettement corrigées par le modèle RNG. Le modèle v2-f est encore bien plus proche de la
valeur DNS, surtout pour de faibles maillages.
Maillage k-ε RNG v2-f
30×31 upwind : 4.65527678
thêta 0.5 : 4.81410321
upwind : 5.00949479
thêta 0,5 : 5.29846214
upwind : 5.47051637
thêta 0,5 : 5.81077914
59×59 upwind : 4.87517035
thêta 0.5 : 4.99667071
upwind : 5.46109047
thêta 0,5 : 5.63941012
upwind : 5.93994940
thêta 0,5 : 6.16495684
119×119 upwind : 4.95959748
thêta 0.5 : 5.01564461
upwind : 5.61898156
thêta 0,5 : 5.70411395
upwind : 6,20125347
thêta 0,5 : 6.33489685
Tableau 1. Comparaison des longueurs de la recirculation
Nous comparons sur la figure 1 le coefficient de frottement à la paroi inférieure. C‘est un
critère bien plus pertinent que le précédent puisqu‘il donne des informations sur l‘intensité des
recirculations et sur celle de la zone de recollement en aval de celle-ci. Le modèle RNG
améliore la solution mais pas aussi nettement que le v2-f. A noter que sur ce graphe, apparaît
la recirculation secondaire, dont la longueur est de 0,42H pour le v2-f, 0,47H pour le RNG et
0.32H pour le k-ε, à comparer avec la longueur DNS de 1.46H.
Figure 1. Comparaison des coefficients de frottement
Les deux figures suivantes montrent une comparaison entre les modèles k-ε, RNG et v2-f, sur
le maillage de 1202
et les données DNS. En ce qui concerne les profils de la composante
-6,00E-03
-4,00E-03
-2,00E-03
0,00E+00
2,00E-03
4,00E-03
6,00E-03
8,00E-03
0 2 4 6 8 10 12 14 16 18 20
x/H
Cf
D N S k -e 1 2 0 R N G 1 2 0 v2 -f 1 2 0

143
horizontale de la vitesse, la différence entre les modèles k-ε et RNG est nette, surtout dans la
zone de recirculation. Les résultats qui se rapprochent le plus des profils DNS sont ceux du v2-
f. Le gain est assez notable. Pour les profils de k, les modèles surestiment l‘intensité de
l‘énergie cinétique turbulente aussi bien dans la zone tourbillonnaire que dans la zone de
recollement.
Figure 2. Comparaison des profils de la composante horizontale de la vitesse
Figure 3. Comparaison des profils de l’énergie cinétique turbulente
5.2.5 Fichiers de données associés marchetur2d_la_ke.don
5.2.6 Références [1] Driver D.M. & Seegmiller H.LM. (1985). Features of a reattaching turbulent shear layer in
divergent channel flow, AIAA J., vol. 30, n°12, p2968-2970.
[2] Dumoulin J. et al. (1996). Caractérisation de l‘écoulement sur une marche descendante :
cas test n°1. Rapport final n°1/2568.00/CERT/DERMES., ONERA.
[3] Kim J.J. (1978). Investigation of separation and reattachment of a turbulent shear layer :
flow over a backward facing step. Ph.D. Thesis, Stanford University.
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
1,6
1,8
2,0
-3 2 7 12 17 22 27
1 0 U/Uo +x/H
z/H
k -e 1 2 0 R N G 1 2 0 v2 -f D N S S érie2 4
0,0
0,5
1,0
1,5
2,0
2,5
-5 0 5 10 15 20
1 0 0 k /Uo ²+x/H
z/H
D N S k -e 1 2 0 R N G 1 2 0 v2 -f 1 2 0

144
[4] Le H. , Moin P. & Kim J. (1993). Direct numerical simulation of turbulent flow over a
backward-facing step. Thermosciences Div., Dept. Of mechanical Engineering, Rept. TF58,
Stanford University.
[5] Moss W.D. & Baker S. (1980). Re-circulation flows associated with two-dimensional
steps. Aeronautical Quaterly, August 1980, p151-172.

145
5.3 Écoulement turbulent avec changement de la rugosité de surface
5.3.1 Intérêt Certains écoulements sont soumis à de brusques changements de la rugosité de surface.
L‘objectif est ici de valider l‘implémentation de la loi de paroi rugueuse sur la vitesse (limitée
à cette configuration) sur un écoulement atmosphérique turbulent sur une surface plane dont
la rugosité change brusquement. L‘expérience de Bradley [1] a montré les changements que
subit la couche limite dans cette configuration. L‘expérience a été menée sur une piste d‘un
aérodrome Australien dont une partie de la surface a été recouverte de pointes verticales pour
augmenter sa rugosité.
5.3.2 Description Un écoulement de couche limite neutre est perturbé par un saut de rugosité : une couche
interne se développe de hauteur H(x) (cf. figure 1). Elle est composée à sa base d‘une sous-
couche limite en équilibre de hauteur h(x) coiffée d‘une couche de transition pour laquelle
les lois classiques de couche limite ne s‘appliquent pas.
Figure 1. Configuration de l’expérience de Bradley
Le domaine est d‘une hauteur de 2,8 m pour une longueur de 40 m (3,6 m en amont du
changement de rugosité et 36,4 m en aval). La vitesse de frottement u* vaut 0,104 m/s. Le
rapport des rugosités aval/amont est de 125 (passage de 2 10-5
à 2.5 10-3
). La stratification de
l‘atmosphère est neutre.
5.3.3 Modèles et méthodes numériques Le couplage vitesse/pression est résolu par la méthode du lagrangien augmenté. Un maillage à
pas variable, raffiné sur la limite inférieure est utilisée. Les conditions à l‘entrée du domaine
sont les suivantes :
𝑢(𝑧) =𝑢∗
𝜅𝑙𝑛
𝑧
𝑧0 (1)
𝑘 = 𝐶𝜇−1/2
𝑢∗2 (2)
𝜀 =𝑢∗
3
𝜅𝑧 (3)
A la limite inférieure, une condition de Fourier est appliquée à la composante horizontale de
la vitesse :
𝜕𝑢
𝜕𝑧=
𝜅𝐶𝜇1/4
𝜌𝑘1/2
𝜇𝑡𝑙𝑛𝑧𝑧0
𝑢

146
La composante verticale est nulle sur la limite inférieure. Une condition de Neumann est
appliquées à k et de Dirichlet à ε (éq. 3). Une condition de Neuman est appliquée à toutes
les variables en sortie de domaine. Le solveur MUMPS est utilisé, en séquentiel comme en
parallèle.
5.3.4 Résultats et commentaires La figure suivante montre un bon accord entre les résultas expérimentaux et numériques sur la
vitesse de cisaillement adimensionnée. Les résultats complets sont dans [2] et montrent que la
modification de la structure de la couche limite est bien prise en compte par notre modèle.
Figure 2 : évolution de la vitesse de cisaillement adimentionnée en fonction de la distance
5.3.5 Fichiers de données associés rugosite_la.don
5.3.6 Références [1] Bradley E.F. (1968). A micrometeorological study of velocity profiles and surface drag in
the region modified by a change in surface roughness. Quart. J. Roy. Met. Soc., vol. 94,
p361-
379.
[2] Hadjira Foudhil (2002), Développement d'un modèle numérique de dispersion
atmosphérique de particules à l'échelle d'un paysage hétérogne, Thèse de l‘univerté
Bordeaux 1.

147
6 Écoulements convectifs laminaires


149
6.1 Convection naturelle dans une cavité carrée différentiellement
chauffée (N)
6.1.1 Intérêt Il s‘agit d‘un cas test académique standard permettant de valider le couplage Navier-Stokes /
équation de l‘énergie.
6.1.2 Description La cavité carrée contient de l‘air à T0=300K à la pression atmosphérique de p0=101325Pa.
Les conditions aux limites verticales sont maintenues à température 0
2T T et 0
2T T .
L‘écart de température T ne doit pas excéder quelques degrés de manière à rester dans
l‘approximation de Boussinesq. L‘écoulement sera considéré comme incompressible. Seule la
solution stationnaire est recherchée. Les paramètres adimensionnels de ce problème sont le
nombre de Rayleigh et le nombre de Prandtl :
Ra 3
g T L
a
Pr pc
Le nombre de Prantdl est Pr=0.71 et le nombre de Rayleigh varie dans la gamme Ra=102 à
108. L‘écoulement est stationnaire. Les paramètres du calcul peuvent éventuellement être
ceux-ci :
0
5
101325 1 1768293 1 1 1006
1 8510 1 0644145 0 026212675 1 4 287 0 1
m m Tm m p
m
p T p c
T r L
Ra= 10E2 Pr=0.71 L= 0.01
Ra= 10E3 Pr=0.71 L= 0.021544345
Ra= 10E4 Pr=0.71 L= 0.046415881
Ra= 10E5 Pr=0.71 L= 0.1
Ra= 10E6 Pr=0.71 L= 0.21544345
Ra= 10E7 Pr=0.71 L= 0.46415881
Ra= 10E8 Pr=0.71 L= 1.
6.1.3 Modèles et méthodes numériques Le couplage vitesse/pression est résolu aussi bien avec la méthode du lagrangien augmenté,
complété par une étape de projection vectorielle, qu‘avec la méthode de correction de
pression. L‘adhérence est imposée sur toutes les limites du domaine. Le gradient de
température est imposé entre les limites gauche et droite. La loi d‘état linéaire est choisie.
Des maillages à pas constant et pas variables sont utilisés (à variation du pas d‘espace suivant
les polynômes de Chebychev).
Le solveur MUMPS est utilisé pour Navier-Stokes, le BiCGStab(2) pour la projection
vectorielle. Ce cas tourne en séquentiel comme en parallèle (à condition de ne pas utiliser la
projection vectorielle en parallèle).

150
6.1.4 Résultats et commentaires Les tableaux suivant montrent les résultats obtenus à pas variables et pas constants ainsi que
les ordres de convergence obtenus pour différents schémas.
Nu 210Ra
310Ra
410Ra
510Ra
610Ra
710Ra
810Ra
82
1.0014 1.1141 2.2446 4.8713 9.8767 12.193 12.776
162
1.0014 1.1167 2.2434 4.5432 8.9158 16.812 35.742
322
1.0015 1.1175 2.2441 4.5261 8.8298 16.550 30.418
642
1.0015 1.1177 2.2447 4.5227 8.8257 16.527 30.242
1282
1.1178 2.2448 4.5219 8.8253 16.523 30.227
2562
4.5217 8.8252 16.523 30.225
5122
4.5216
Réf
PLQ 4.521 8.8252 16.523 30.225
Tableau 1. Nombre de Nusselt en fonction du maillage, schéma centré, maillages Chebychev
N Centré Hybride Upwind QUICK Double
amont
L.W. TVD
8 3.05746200462453 2.99926415604780 2.85499647854287 3.02971336018059 2.99319186778697 2.93015546693588
16 4.05410063381570 4.04167992300254 3.99423450703297 4.04484735418343 4.01954086997581 3.98904187172800
3 2 4.39895921775463 4.39884000184546 4.39742984171690 4.39743998624806 4.39331603387615 4.37387528299202
64 4.49065807696335 4.49065807695902 4.49355827488052 4.49017599992176 4.48878645865774 4.47919118824600
1 2 8 4.51387398730951 4.51387398731988 4.51583102683594 4.51372874500775 4.51329692266909 4.49810228
256 4.51969520778038 4.51969520778038 4.52075557691273 4.51965525665446 4.51953494785305 4.513
512 4.52115160082851 4.52115160082851 4.52169713969788 4.52114124731411 4.52110942702200 4.517
Tableau 2. Nombre de Nusselt en fonction du maillage, maillages réguliers

151
N Centré Hybride Upwind QUICK D.Amont L.W. TVD
8 0.14641755D+01 0.15223734D+01 0.16669232D+01 0.14919252D+01 0.15284491D+01 0.15883127D+01
16 0.46753692D+00 0.47995763D+00 0.52768521D+00 0.47679117D+00 0.50210012D+00 0.52942633D+00
3 2 0.12267833D+00 0.12279755D+00 0.12448988D+00 0.12419854D+00 0.12832496D+00 0.14459291D+00
64 0.30979472D-01 0.30979472D-01 0.28361447D-01 0.31462524D-01 0.32854535D-01 0.39277009D-01
1 2 8 0.77635619D-02 0.77635619D-02 0.60886947D-02 0.79097791D-02 0.83440708D-02 0.20365917D-01
256 0.19423414D-02 0.19423414D-02 0.11641446D-02 0.19832675D-02 0.21060456D-02 0.54681970D-02
512 0.48594836D-03 0.48594836D-03 0.22258180D-03 0.49727684D-03 0.53156646D-03 0.14681970D-02
ordre 1.99 1.99 2.38 1.99 1.99 1.90
Nu
4.5216375 4.5216375 4.5219197 4.5216385 4.5216410 4.5184682
Tableau 6. erreur sur le Nusselt, maillage régulier
N N u Régulier N u Chebychev
8 3.05746200462453 4.87195246437460
16 4.05410063381570 4.54338590917081
3 2 4.39895921775463 4.52618470034175
64 4.49065807696335 4.52272378426808
1 2 8 4.51387398730951 4.52190582751890
256 4.51969520778038 4.52170412136440
512 4.52115160082851 4.52165386610953
Tableau 7. Convection naturelle en cavité différentiellement chauffée à 510Ra ,
comparaison entre maillages régulier et Chebychev
6.1.5 Fichiers de données Le fichier est convection2d_la.don avec la méthode du lagrangien augmenté. Avec la méthode
de correction de pression, le fichier est convection2d_cpre.don. En 3D, il s‘agit de
convection3d_la.don et de convection3d_cpre.don.


153
6.2 Convection naturelle en milieu poreux
6.2.1 Intérêt Ce cas vise à valider le code sur un écoulement de convection naturelle en milieu poreux dans
lequel la perméabilité est donnée par la relation de Carman-Kozeny.
6.2.2 Description On considère un problème de convection naturelle dans une cavité carrée de côté H, remplie
d‘un milieu poreux de porosité constante. La cavité est initialement à température Ti. La
convection naturelle est générée par une différence de température (TH-TC) entre les parois
gauche (TH) et droite (TC). Les parois haute et basse sont adiabatiques. Les paramètres
adimensionnés sont définis par:
le nombre de Darcy modifié :
3____
2 2,
(1 )
oK
D a D a D aH
où est la porosité, K0 est la perméabilité
le nombre de Rayleigh :3
( )T H C
g T T HRa
Le nombre de Prandtl est pris égal à 1, et les rapports de conductivité et de capacité
calorifique entre le solide et le fluide égaux à 1.
Les calculs sont poursuivis jusqu‘à l‘obtention du régime permanent, et la valeur moyenne du
nombre de Nusselt est alors calculée. Les résultats sont comparés avec ceux de Bars et
Worster [1], Nithiarasu et al. [2]. Dans le cadre de cette fiche de validation, la porosité est
égale à 0.4, le nombre de Darcy est égal à 10-6
et le nombre de Rayleigh vaut 107.
Ajustement des caractéristiques du fluide pour obtenir les nombres adimensionnés
(s=solide, l=liquide)
H=0.1 m
g=10 m/s2
ρs=ρl=1.0 kg/m3
ks=kl=0.01 W/mK
Cps=Cpl=1000 J/kgK
μ=10-5
Pa.s
T=10-3
K-1
Le coefficient de perméabilité est de 5.625 10-8
(soit une perméabilité de 10-8
par application
de la loi de Carman-Kozeny)
6.2.3 Modèles et méthodes numériques Les effets d‘advection et de porosité sont pris en compte dans les équations de Navier-Stokes
et de l‘énergie. La perméabilité est donnée par la relation de Carman-Kozeny.

154
Il est à noter que Nithiarasu et al. [1] introduisent dans leurs calculs un terme de trainée non
linéaire supplémentaire −1.75
150
𝑢2+𝑣2
𝜀𝐷𝑎 𝑉 dont nous ne tenons pas compte.
Le couplage vitesse/pression est résolu par la méthode du lagrangien augmenté ou bien par la
méthode de correction de pression en formulation rotationnelle (résultats identiques). Le
maillage est raffiné près des parois. Ce cas tourne en séquentiel comme en parallèle.
6.2.4 Résultats Le tableau 1 donne les valeurs du nombre de Nusselt pour différents maillages. La solution est
extrapolée à l‘aide des trois dernières solutions. Nous vérifions aussi que les solutions se
trouvent bien dans la zone de convergence asymptotique. L‘ordre de convergence spatiale est
conforme à l‘ordre 2 des schémas utilisés. Le tableau 2 montre le bon accord avec les résultats
de [1] et [2].
Maillage Nusselt Ordre (sur 3 points) Erreur rel. Ordre local
32 1.07193231 -2.10E-04
64 1.07208485 -6.77E-05 1.63
128 1.07213774 -1.84E-05 1.88
256 1.07215245 -4.67E-06 1.98
512 1.07215620 -1.17E-06 2.00
1024 1.07215714 2.00 -2.93E-07 2.00
Extrapolation 1.07215745
Tableau 1. Nombre de nusselt pour différents maillages et ordres de convergence.
Bars et Worster(2006) Nithiarasu et al.
(1997)
Thétis
(extrapolation)
1.08 1.08 1.07215745
Tableau 2. Comparaison du nombre de Nusselt moyen comme fonction des nombres de
Rayleigh et de Darcy.
6.2.5 Modèles et méthodes numériques
[1] Michael Le Bars, M. Grae Worster, Solidification of a binary alloy: Finite-element, single-
domain simulation and new benchmark solutions, Journal of Computational Physics 216
(2006) 247–263.
[2] P. Nithiarasu, K.N. Seetharamu, T. Sundararajan, Natural convective heat transfer in an
enclosure filled with fluid saturated variable porosity medium, Int. J. Heat Mass Transf. 40
(1997) 3955–3967.

155
6.3 Convection naturelle dans une cavité carrée différentiellement
chauffée avec changement de phase liquide/solide (N)
6.3.1 Intérêt L‘objectif de ce cas est de valider le couplage entre un écoulement et la méthode de prise en
compte du changement d‘état liquide/solide dans le cadre d‘un entre un écoulement et la
fusion d‘un milieu. Une solution de référence a été donnée dans [2].
6.3.2 Description On considère une cavité carrée initialement remplie d‘étain à l‘état solide. Le domaine
possède une température initiale très proche de la température de fusion Tf. On notera cette
température initiale T0 = Tf - . Les conditions aux limites du domaine sont des températures
imposées à gauche (TG) et à droite (TD) et des conditions adiabatiques en haut et en bas. De
cette façon, l‘étain, initialement solide, va fondre au fur et à mesure. La convection prend
place et créé des cellules de convection.
Figure 1 : schéma de la configuration
6.3.3 Modèles et méthodes numériques La modélisation de ces phénomènes est réalisée à l‘aide des équations de Navier-Stokes en
incompressible, couplées à l‘hypothèse de Boussinesq. Le champ de température est
déterminé par l‘équation de l‘énergie, en tenant compte d‘un terme source pour activer le
changement de phase liquide-solide. La gravité est prise en compte, ainsi que la variation
(linéaire) de la masse volumique en fonction de la température. La convection naturelle peut
donc intervenir par évolution de la masse volumique en fonction de la température. Le choix
des températures aux limites implique que l‘étain peut fondre et donc initier l‘écoulement,
directement influencé par la vitesse de fusion du matériau.

156
Afin de modéliser la solidification et la fusion, nous utilisons un modèle basé sur la
modification de la perméabilité locale en fonction de la fraction solide afin de pénaliser la
vitesse (le solide est figé). Pour cela, on utilisera l‘expression de Carman-Kozeny qui modifie
la perméabilité K en fonction de la fraction solide fs.
On considère pour cela une cavité carrée de 0.1 m de coté dans laquelle on dispose un
matériau initialement à l‘état solide (étain, dont les caractéristiques thermiques sont décrites
dans le tableau 1). Les conditions aux limites supérieure et inférieure sont adiabatiques. On
impose une température chaude à gauche (TG = 508K) et froide à droite (TD = 505K). Afin de
s‘assurer qu‘initialement tout le domaine est solide, on initialise la température de domaine à
504.975K.
Paramètre Valeur Unité
Masse volumique de référence 7.5.103
kg/m3
Capacité calorifique 200 J/kg.K
Viscosité dynamique 6.10-3
Pa.s
Conductivité thermique 60 W/m.K
Coefficient d‘expansion volumétrique 2.67.10-4
K-1
Température de fusion 505 K
Chaleur latente 6.104
J/kg
Nombre de Rayleigh 2.5.105
Nombre de Stefan 0.01
Nombre de Prandtl 0.02
Tableau 1 : caractéristiques de l’étain et nombres adimensionnels de ce cas test
Le couplage vitesse/pression est résolu par la méthode de correction de pression. Les
itérations du point fixe de la méthode du changement de phase étant assez nombreuses, ce cas
test a été réalisé en parallèle.
6.3.4 Résultats et commentaires Cette fiche correspond aux premiers résultats obtenus sur ce cas. Nous donnons ici le nombre
de Nusselt en x=0 au temps T=100s pour différents maillages (cf. tableau 2). La valeur du
nombre de Nusselt de référence, obtenue dans [2] sur un maillage 800x800, est Nu=11,25220.
Une prochaine étude portera sur les fonctions courant maximale et minimale ainsi que les
vitesses minimales et maximales et le nombre de Nusselt jusqu‘à T=700s.
Temps Pas de
temps
64 128 256
100s 1 10.761070 11,47511952 11,15786429
Tableau 2 : nombre de Nusselt au temps T=100s en fonction du maillage
6.3.5 Fichiers de données Le fichier est convection2d_chphase.don.

157
6.3.6 Références [1] Rappaz M., Bellet M., Deville M., Traité des matériaux, modélisation numérique en
science et génie des matériaux. Ed. Presses polytechniques et universitaires romandes, 1998.
[2] Hannoun N., Alexiades V., Mai Z., A reference solution for phase change with
convection. Int. J. Numer. Meth. Fluids 2005 ; (48), 1283 – 1308.


159
6.4 Convection mixte dans un canal 3D de section rectangulaire
6.4.1 Intérêt Ce cas vise à valider le code sur un écoulement 3D de type Poiseuille-Rayleigh-Bénard objet
d‘un benchmark [1] dont les résultats sont en cours de publication.
6.4.2 Description On considère un problème de convection mixte dans canal de section rectangulaire chauffé
par la paroi inférieure. L‘écoulement se compose de 10 rouleaux thermo-convectifs
stationnaires dans un canal dont le rapport profondeur/hauteur B/H est de 10 et
longueur/hauteur L/H de 50 (cf. figure 1). Le nombre de Reynolds est de 50, le nombre de
Rayleigh de 5000 et le nombre de Prandtl de 0.7. Un écoulement de type canal plan 3D, de
vitesse moyenne U0, dont la solution exacte est donnée dans [2] est imposé en entrée ; la
température du fluide en entrée est imposée à TC=0. Des conditions adiabatiques sont
imposées sur les 4 limites après la condition limite d‘entrée et sur une longueur égale à Ae. A
partir de x=0, la limite inférieure est maintenue à TH=1, la limite supérieure à TC=0 ; les
limites latérales sont adiabatiques. Des conditions de sortie de Neumann sont utilisées pour la
vitesse et la température.
L‘écoulement est stationnaire et symétrique par rapport au plan médian vertical situé en
y=B/2.
Figure 1. Géométrie et condition aux limites sur la température [1] ;
A=L/H=50 ; B=10 ; Ae=2
Ajustement des caractéristiques du fluide pour obtenir les nombres adimensionnés
H=1 m
g=9.81 m/s2
ρ=1 kg/m3
k= 0.02857142857142857D0 W/mK
Cp=1 J/kgK, T=3.33333333 10-3
K-1
μ=1 10-2
Pa.s
U0=1 m.s-1

160
6.4.3 Modèles et méthodes numériques L‘hypothèse de Boussinesq est adoptée. Le couplage vitesse/pression est résolu par la
méthode de correction de pression en formulation rotationnelle. Le maillage est à pas
constant. Une étude de convergence est réalisée sur 3 maillages : 600×160×40, 900×240×60
et 1350×360×90.
Ce cas tourne en séquentiel comme en parallèle, bien que l‘ensemble des calculs ait été réalisé
en parallèle en raison du nombre élevé de points (43.74 millions de points sur 152 processeurs
pour le maillage le plus fin). Une condition de symétrie a été utilisée dans le cadre du
benchmark mais n‘est pas utilisée dans le fichier de données associée à cette fiche.
6.4.4 Résultats Les résultats du benchmark sont en cours de publication. Nous ne présentons ici que ceux de
Thétis, sachant qu‘un accord jusqu‘à 4 ou 5 chiffres significatif a été observé entre les
différents participants.
Une étude de convergence a été réalisée sur des grandeurs globales (double de l‘énergie
cinétique moyenne, température moyenne, différence de pression moyenne entre l‘entrée et la
sortie). L‘ordre de convergence mesuré est de 2 pour l‘énergie cinétique moyenne et la
différence de pression moyenne (cf. tableau 1). Il est de 1 pour la température moyenne en
raison de la discontinuité de température observée sur la limite inférieure. La figure 2 des
erreurs calculées a posteriori en fonction du maillage indique que les 3 solutions se trouvent
bien dans la zone asymptotique de convergence. Une discussion complète de ce cas test ainsi
que des comparaisons sur d‘autres quantités globales ou locales (nombres de Nusselt,
composantes du vecteur vitesse, température, flux aux limites) sera proposée dans une
prochaine version du cahier de validation [3,4].
600 900 1350 Ordre Extrapol.
T 0.44887844 0.448786396 0.44872548 1.01800433 0.44860627
2Ec 1.29194915 1.292230274 1.29235514 2.00163518 1.29245491
P 14.3844072 14.39682791 14.4023524 1.99813973 14.406778
Tableau 1. Energie cinétique moyenne, différence de pression moyenne entre l’entrée et la
sortie et température moyenne pour différents maillages ; ordres de convergence et
extrapolations mesurés.

161
Figure 2. Erreur a posteriori de l’énergie cinétique moyenne, de la différence de pression
moyenne entre l’entrée et de la sortie et température moyenne pour différents maillages.
6.4.5 Modèles et méthodes numériques
[1] M. Medale and X. Nicolas, CALL FOR CONTRIBUTIONS: Towards numerical
benchmark solutions for 3D mixed convection flows in rectangular channels heated from
below, Int. J. Thermal Sc., 45 (2006) 331-333.
[2] X. Nicolas, J. M. Luijkx and J. K. Platten, Linear stability of mixed convection flows in
horizontal rectangular channels of finite transversal extension heated from below, Int. J. Heat
Mass Transfer, 43 (2000) 589–610.
[3] Xavier Nicolas, Marc Médale, Stéphane Glockner, Stéphane Gounand, Vers une solution
numérique de référence pour un écoulement 3D de convection mixte : démarche et résultats.
Congrès SFT 2010, 25-28 mai 2010.
[4] Xavier Nicolas, Marc Médale, Stéphane Glockner, Stéphane Gounand, Use of Richardson
extrapolation to establish a first numerical benchmark solution for three-dimensional mixed
convection flows in rectangular channels. Article en cours de rédaction.
y = 183.99x-2.002
y = 7958.2x-1.998
y = 0.1832x-1.018
0.00001
0.0001
0.001
0.01
0.1
100 1000 10000
2Ec moy
dPmoy
Tmoy


163
7 Écoulements diphasiques


165
7.1 Rupture de barrage sur sol sec ou en présence d’un film liquide
préexistant (A,E,N)
7.1.1 Intérêt On s‘intéresse à une rupture de barrage, caractérisée par l‘effondrement d‘une colonne d‘eau
dans l‘air sous l‘effet de la gravité. Le problème de la rupture de barrage a été très largement
étudié par des approches aussi bien expérimentales, théoriques que numériques.
Deux cas tests sont considérés, avec initialement une retenue d‘eau en aval ou non. Ces cas
sont très intéressants car ils permettent de valider les simulations numériques par rapport à des
données expérimentales et à une solution analytique instationnaire. Ce problème met en avant
l‘intervention de la gravité et de forts gradients de densité et de viscosité. Des ondes de choc
et de détente apparaissent au cours du déferlement vers l‘aval de la colonne d‘eau initiale.
Dans le cas où un film d‘eau est présent en aval de la retenue d‘eau amont, on observe le
développement d‘un jet d‘eau qui vient déferler sur le film aval. Les caractères fortement
déformable de la surface libre et fortement instationnaire de l‘écoulement confèrent aux deux
cas tests un bon point de repère pour valider la méthode de suivi d‘interface, ainsi que celle de
résolution du modèle 1-fluide.
7.1.2 Description Nous étudions d‘une part la rupture de barrage sur un sol sec : à l‘instant initial, on considère
un barrage correspondant à une retenue d‘eau de hauteur hg et de longueur L/2, à droite de
laquelle se situe un sol sec. On suppose que le barrage cède et on souhaite prédire les
évolutions de la surface libre ih et de l‘hydrodynamique à tous les instants après la rupture.
Nous nous intéressons aussi à la rupture de barrage sur sol mouillé : les caractéristiques du
problème sont identiques aux précédentes, sauf qu‘une réserve d‘eau de hauteur hd repose en
aval du barrage.
L‘écoulement est supposé isotherme et incompressible. Dans les deux cas, les caractéristiques
des fluides en présence (air et eau) sont les suivantes :
masse volumique : 3
1000l
kg m
(eau), 3
1 1768g
kg m
(air)
viscosité dynamique : 3
10l
Pa s
(eau), 5
10g
Pa s
(air)
La tension superficielle entre l‘eau et l‘air est : 0 075 1N m
.
Rupture de barrage sur sol sec :
2 0 6L m ,
0 14H m ,
0 1g
h m ,
0d
h m ,

166
Rupture de barrage sur sol mouillé :
2 0 6L m ,
0 14H m ,
0 1g
h m ,
d gh h k avec 1k ,
L‘intensité de la gravité g est 29 81m s
.
Si on considère la vitesse de propagation des ondes de surface g g
c gh comme vitesse de
référence, on définit alors les nombres adimensionnels de Froude et de Reynolds comme suit :
0
g
UF r
c ;
( )
l g d g
l
h h cRe
.
avec 0U une vitesse caractéristique de l‘écoulement.
Les deux problèmes ont été étudiés expérimentalement par Martin et Moyce [1] d‘une part sur
le cas fond sec, et Stansby et col. [2] sur les deux configurations sèche et mouillée. Des
données expérimentales très précises sont disponibles dans les publications citées ci-dessus.
Les deux cas tests possèdent par ailleurs des solutions analytiques sous les hypothèses
d‘hydrostaticité et de fluide parfait, par l‘intermédiaire du modèle Saint-Venant et de la
théorie des caractéristiques non-linéaires :
Rupture de barrage sur fond sec
de 2x L à OA (OA est la courbe g
x gh t ), la solution analytique est 0m
U
et i dh h .
de OA à OB (OB est la courbe sx h t ), on a 2 2( )
3 3m g
xU ght
et
22
( )3 3
g
i
xgh
th g
.
de OB à OS (OS correspond à la courbe x st , où s est la vitesse du choc), la
surface libre (notée ici sh ) et la vitesse (notée s
U ), ainsi que s, sont obtenues en
résolvant le système suivant

167
2 2 2
2 2 0
( ) 0
( )( ) ( ) 0
2 2
s s g
d s s s
d s s s
s s
s
U gh gh
s h h h U
gh h U ghsh U
h
de OS à 2x L , la solution est 0m
U et i dh h
où mU est la vitesse moyenne de l‘écoulement issue du modèle Saint-Venant, t est le
temps et x la coordonnée d‘espace horizontale.
Rupture de barrage sur fond mouillé
de 2x L à OA, on a un état stationnaire correspondant à l‘état initial. OA est la
courbe g
x gh t . La solution analytique est 0m
U et 1ih h
de OA à OS, une onde de raréfaction se développe contenant un point sonique à
0x . OS est la courbe 2g
x gh t . La solution est 2 2( )3 3m g
xU ght
et
22( )3 3g
i
xght
hg
de OS à 2x L , l‘état est stationnaire comme à l‘état initial. La solution est 0m
U
et i dh h
7.1.3 Modèles et méthodes numériques On résout le modèle 1-fluide avec prise en compte des tensions superficielles, même si
les forces induites par ces dernières sont négligeables.
On utilise des conditions aux limites de type SYMETRIE sur les bords supérieur,
gauche et inférieur du domaine d‘étude, tandis que des conditions limites de SORTIE
sont imposées à droite.
Les paramètres numériques utilisés sont les suivants : Dans les deux cas, on considère
un domaine d‘étude de longueur 2 L et de hauteur H.
Initialement, les vitesses sont nulles. Le domaine de calcul fait 1.2 m de long et 0.2 m
de haut. La retenue d‘eau de 0.1 m de haut est positionnée sur la partie moitié gauche
du domaine de calcul. Dans le cas sur fond mouillé, le film d‘eau de hauteur 0.01 m
est positionné sur la partie moitié droite du domaine d‘étude.
La méthode du lagrangien augmenté avec calcul automatique du paramètre de
minimisation dr est utilisée.
Solveur MUMPS en séquentiel
Rupture de barrage sur sol sec : x=0.002 mm, t=0.0002 s
Rupture de barrage sur sol mouillé : x=0.002 mm t=0.0002 s
7.1.4 Résultats et commentaires

168
Figure 1. Rupture de Barrage sur fond mouillé - Comparaison entre la solution Thétis (eau en
rouge et air en bleu), la solution expérimentale de Stansby (carrés noirs) et la solution
théorique des équations de Saint-Venant (ronds jaunes) – t=0.24 s.
Figure 2. Rupture de Barrage sur fond mouillé - Comparaison entre la solution Thétis (eau en
rouge et air en bleu), la solution expérimentale de Stansby (carrés noirs) et la solution
théorique des équations de Saint-Venant (ronds jaunes) – t=0.4 s.
7.1.5 Fichiers de données associés Le fichier de données est barrage_la.don
7.1.6 Références [1] J. C. Martin and W. J. Moyce, An experimental study of the collapse of liquid columns on
a rigid horizontal plane, Phys. Trans. Serie A, Math. Phys. Sci., vol. 244, pp. 312-325, 1952
[2] P. K. Stansby, A. Chegini and T. C. D. Barnes, The initial stages of dam-break flow, J.
Fluid Mech., vol. 374, pp. 407-424, 1998
[3] F. H. Harlow and J. E. Welch, Numerical calculation of time-dependent viscous
incompressible flow of fluid with free surface, Phys. Fluid, vol. 8, pp. 2182-2189, 1965

169
[4] S. Vincent, P. Bonneton and J.-P. Caltagirone, Numerical modelling of bore propagation
and run-up on sloping beaches using a MacCormack TVD scheme, J. Hydraulic Res., in
corrections, 2000
[5] S. Vincent, Modélisation d’écoulements incompressibles de fluides non-miscibles, Thèse
de Mécanique, Université Bordeaux I, 1999


171
7.2 Propagation d’une onde solitaire (A,E,N)
7.2.1 Intérêt Les ondes solitaires sont réputées pour un certain nombre de propriétés intéressantes. En effet,
elles sont constituées d‘une bosse unique, symétrique, et se propagent sur fond plat à célérité
constante, sans changer de forme ni perdre d‘énergie.
Le but de ce cas est donc de valider très précisément les schémas de transport d‘interface
(VOF, TVD, etc.), ainsi que la précision des méthodes numériques (conditions aux limites
périodiques, schémas, etc.).
7.2.2 Description Pour ce faire, on dispose de solutions analytiques à différents ordres d‘approximation
(Boussinesq, 1871, McCowan, 1891, Grimshaw, 1971, Fenton, 1972, Lee et al., 1982), de
résultats expérimentaux (Lee et al. , 1982) et numériques (Tanaka, 1986). Les variables de
références permettant de déterminer complètement une onde solitaire initiale sont son
amplitude H, la profondeur d‘eau d dans laquelle elle se propage et sa célérité c.
A tout instant t, le profil de surface libre , la célérité et les champs de vitesse (u et v étant les
composantes cartésiennes) et de pression peuvent être calculées à partir de la solution
analytique au premier ordre de Grimshaw (1971).
Des solutions numériques sont disponibles dans la littérature, telles que celle de Fenton
(1972) au 9ième
ordre ou la solution exacte de Tanaka.
On propose donc de simuler la propagation d‘une onde solitaire dans un domaine périodique à
fond plat. Cette onde étant complètement définie pour une amplitude et une profondeur
données, il est donc possible de comparer à tout instant de la simulation les profils de surface
libre et de vitesses, à différentes profondeurs, par rapport à la solution théorique détaillée
précédemment. Il est aussi possible de vérifier la conservation de la masse, de l‘énergie
cinétique, de l‘énergie potentielle et de l‘énergie totale :
2
cin
pot
tot cin pot
1E u dxdz
2
E zdxdz
E E E
7.2.3 Modèles et méthodes numériques La crête est localisée au milieu du domaine numérique, des conditions de périodicité étant
imposées dans la direction de l‘écoulement et une condition de symétrie est imposée en limite
inférieure. Le domaine, long de 10 m et haut de 0,6 m, est discrétisé par un maillage cartésien
régulier de 300 x 150 points. La simulation est réalisée avec les caractéristiques de l‘air et de
l‘eau (air = 1.1768 kg.m-3
and eau = 1000 kg.m-3
, μair = 1,85.10-5
kg.m-1
.s-1
and μeau = 1.10-3
kg.m-1
.s-1
). Le pas de temps est constant Δt = 1.10-2
s. La tension de surface est
σ = 0.075 N.m-1
.
La profondeur est d = 0.302 m et la hauteur de l‘onde est H = 0.03322 m ( = H / d = 0.11), ce
qui donne une hauteur de crête z = 0.33522 m. La célérité est c 1.813 m.s-1
.

172
Le couplage vitesse/pression est résolu avec la méthode du lagrangien augmenté. Le solveur
MUMPS est utilisé.
7.2.4 Résultats et commentaires Au bout de 4500 itérations, soit 45 s de propagation, l‘onde doit avoir parcouru 81,6 m (huit
passages par sa position initiale). Les tableaux suivants reprennent les valeurs numériques des
erreurs calculées au bout des 4500 itérations. Le volume initial est volini = 3,116 m2. Le
tableau présente les résultats obtenus avec VOF-PLIC et VOF-TVD, avec et sans tension
superficielle.
Schéma VOF-PLIC VOF-TVD
Tension
superficielle
Avec σ Sans σ Avec σ Sans σ
zfin (m) 0.33054 0.33054 0.3339 0.3339
Erreur (m) -4.68.10-3
-4.68.10-3
-1.32.10-3
-1.32.10-3
Erreur (%) -1.4 -1.4 -4.10-1
-4.10-1
xfin (m) 80.85 80.89 81.13 81.17
Erreur (m) 0.753 0.713 0.473 0.433
Erreur (%) 0.92 0.87 0.58 0.53
volfin (m2) 3.109 3.110 3.114 3.114
Erreur (m) -6.9.10-3
-6.10-3
-2.10-3
-2.10-3
Erreur (%) -2.2.10-1
-2.10-1
-6.42.10-1
-6.42.10-1
Tableau 1 : Erreurs calculées sur les coordonnées de la crête de l’onde solitaire.
7.2.5 Fichiers de données associés Le fichier de données est soliton_la.don.
7.2.6 Références [1] Boussinesq, J. 1871. Théorie de l‘intumescence liquide appelée onde solitaire ou de
translation se propageant dans un canal rectangulaire. C. R. Acad. Sci. Paris, 755.
[2] Fenton, J. 1972. A ninth-order solution for the solitary wave. Journal of Fluid Mechanics,
53, 257–271.
[3] Grimshaw, R. 1971. The solitary wave in water of variable depth. Part 2. Journal of Fluid
Mechanics, 46, 611–622.
[4] Lee, J.-J., Skjelbreia, J. E., & Raichlen, F. 1982. Measurements of velocities in solitary
waves. J. of Waterway, Port, Coastal, and Ocean Eng., WW2(108), 200–218.
[5] Lubin, P., 2004. Simulation des Grandes Échelles appliquée au déferlement plongeant des
vagues, Thèse de doctorat de l‘Université Bordeaux 1, Spécialité Mécanique.
[6] McCowan, J. 1891. On the solitary wave. Philosophy Magazine, 32(5), 45–58.
Tanaka, M. 1986. The stability of solitary waves. Physics of Fluids, 29, 650–655.

173
7.3 Impact d’une onde solitaire sur une paroi (A,E,N)
7.3.1 Intérêt Les ondes solitaires sont réputées pour un certain nombre de propriétés intéressantes. En effet,
elles sont constituées d‘une bosse unique, symétrique, et se propagent sur fond plat à célérité
constante, sans changer de forme ni perdre d‘énergie. En outre, des travaux sont disponibles
pour prédire le run-up atteint par une onde solitaire impactant une paroi verticale.
Le but de ce cas est donc de valider très précisément les schémas de transport d‘interface
(VOF, TVD, etc.), ainsi que la précision des méthodes numériques (conditions aux limites
périodiques, schémas, etc.).
7.3.2 Description Maxworthy (1976) a réalisé des expériences indiquant que l‘onde présentait un comportement
fortement non-linéaire à l‘impact. En effet, en considérant que le cas de deux ondes solitaires
de même amplitude s‘impactant frontalement était un problème symétrique, Maxwothy
(1976) pouvait reproduire l‘expérience en étudiant l‘impact d‘une onde solitaire sur une paroi
verticale. Su and Mirie (1980) ont développé une solution analytique pour calculer les effets
de la collision, jusqu‘au troisième ordre d‘approximation. Ils ont montré que les ondes
préservent leurs caractéristiques initiales (formes et célérités), la collision générant
simplement un retard dans la propagation et la génération de train d‘ondes secondaires.
Le run-up peut être calculé à la paroi tel que : 2 3
m
32
2 4
7.3.3 Modèles et méthodes numériques Une étude systématique a été réalisée (Lubin, 2004). La crête est localisée à x = 1 m, une
condition de paroi étant imposée à droite et une condition de symétrie en limite inférieure. Le
domaine, long de 3 m et haut de 0,2 m, est discrétisé par un maillage cartésien régulier de 600
x 200 points. La simulation est réalisée avec les caractéristiques de l‘air et de l‘eau (air =
1.1768 kg.m-3
and eau = 1000 kg.m-3
, μair = 1.85.10-5
kg.m-1
.s-1
and μeau = 1.10-3
kg.m-1
.s-1
). Le
pas de temps est variable (CFL < 1).
La profondeur est d = 0.1 m et l‘amplitude = H / d a varié de 0.1 à 0.6.
7.3.4 Résultats et commentaires On illustre ici le cas = H / d = 0.2 (H = 0.02 m, zini = 0.12 m et c 1.085 m.s
-1). L‘onde
solitaire se propage de la gauche vers la droite du domaine, pour atteindre un run-up
maximum zm = 0.14058 m (m / d = 0.4058) à t = 1.80 s. Le run-up maximum prédit par Su
and Mirie (1980) est zm = 0.140206 m (m / d = 0.40206), soit une erreur relative de 0,3 %.
La courbe présentée donne la comparaison entre les résultats issus de l‘étude numérique
systématique, la solution analytique développée par Su and Mirie (1980) et les résultats
expérimentaux de Chan and Street (1970) et Maxworthy (1976). Les différences avec la
solution analytique sont principalement dues au fait que le développement analytique ne
prend pas en compte les effets de frottement à la paroi. On a vérifié que le phénomène de

174
génération d‘ondes secondaires était amplifié aux plus grandes amplitudes, ce qui est
confirmé par Maxworthy (1976).
Figure 1. Condition initiale à t = 0 s. = H / d = 0.2.
Figure 2. Run-up maximum à t = 1.80 s. = H / d = 0.2.
a) t = 0.92 s
b) t = 1.41 s
t = 1.58 s
t = 2.09 s
t = 2.27 s
t = 2.93 s
Figure 3. Détails de la collision à différents instants. = H / d = 0.2.

175
Figure 4. Run-up maximum, m / d, en function de l’amplitude adimensionnelle . Ligne
noire : solution analytique (Su and Mirie, 1980) ; ronds noirs : Maxworthy (1976) ; carrés
rouges : Chan and Street (1970) ; triangles verts : résultats numériques.
7.3.5 Fichiers de données associés Le fichier de données est soliton_paroi_la.don.
7.3.6 Références [1] Chan, R. K. C., & Street, R. L., 1970. A computer study of finite amplitude water waves.
J. Comput. Phys., 6, 68-94.
[2] Lubin, P., 2004. Simulation des Grandes Échelles appliquée au déferlement plongeant des
vagues, Thèse de doctorat de l‘Université Bordeaux 1, Spécialité Mécanique.
[3] Maxworthy, T., 1976. Experiments on collisions between solitary waves. Journal of Fluid
Mechanics, 76, 177-185.
[4] Su, C. H., & Mirie, R. M., 1980. On head-on collision between two solitary waves.
Journal of Fluid Mechanics, 98, 509-525.


177
7.4 Remontée de bulle axisymétrique (E)
7.4.1.1 Intérêt
Ce cas consiste principalement à valider la prise en compte d‘inclusions mobiles et
déformables notamment sous l‘action de forces capillaires. Cette validation dans un domaine
bidimensionnel axisymétrique confiné permettra de vérifier rapidement le bon fonctionnement
de l‘algorithme de transport d‘interface avec le couplage vitesse-pression en incompressible et
l‘introduction de termes liés aux tensions de surfaces.
7.4.2 Description
On considère une bulle d‘air initialement sphérique libérée dans un liquide visqueux au repos.
Sous l‘action de la force d‘Archimède, la bulle acquiert une vitesse verticale ascendante.
Pendant la phase d‘accélération les forces de flottabilité, de traînée et de capillarité entrent en
compétition en altérant la morphologie et la cinétique de la bulle.
Si les conditions et paramètres expérimentaux le permettent, la forme de l‘inclusion se
stabilise, et par conséquent la bulle atteint une vitesse constante et se maintient sur une
trajectoire rectiligne. Les travaux expérimentaux de Bhaga et Weber [1] montrent pour une
certaine gamme d‘écoulements que deux nombres caractéristiques suffisent à fixer la taille et
la vitesse terminale de la bulle. Il s‘agit du nombre de Reynolds basé sur le diamètre initial d
de la bulle 𝑅𝑒 = 𝜌𝑓 𝑈∞𝑑/𝜇𝑓 et le nombre de Bond (ou Eotvos) 𝐵𝑜 = 𝜌𝑓𝑔𝑑2/𝜍𝑓/𝑔 , où 𝜌𝑖 et
𝜇𝑖 représentent la masse volumique et la viscosité dynamique de la phase fluide i=f ou
gazeuse i=g , g la gravité, 𝜍𝑓/𝑔 la tension superficielle de la phase gazeuse par rapport à la
phase liquide, et 𝑈∞ la vitesse terminale de la bulle. Le diagramme [1] prédit la morphologie
de la bulle en fonction du couple (Re,Bo).
Fig 1. Carte des régimes Fig 2. Configuration numérique

178
En outre, il est admis et vérifié [1,2]
que dans un intervalle (Re<200,
Bo<200) la bulle et son sillage
présentent une symétrie axiale. Des
études numériques récentes [2]
montrent d‘autre part qu‘un
confinement supérieur à 1/4 n‘a pas
d‘impact significatif sur la vitesse et la
forme de l‘inclusion, et qu‘une dizaine
de diamètres suffisent pour que celles-
ci se stabilisent. Ces constats per-
mettent sans ambiguïtés de fixer un
domaine de calcul similaire, dont les
cotes sont reportées sur la Figure 2. La
validation doit à la fois porter sur la
forme et la cinétique de la bulle. Des
résultats concluants obtenus avec la
méthode de reconstruction d‘interface
VOF-PLIC (avec
REGULARISATION), et des
moyennes de type M2 (arithmétiques)
sont représentés sur la Figure 3. Le cas
A3 possède une forme de disque avec
un fond plat très caractéristique, pour
un régime d‘écoulement relativement
inertiel. La vitesse terminale
expérimentale de cette bulle est
reportée sur la Table 1 et servira de
référence pour ce cas de validation.
Fig 3. Comparaison Exp[1]/FTr [2]/Thétis
Table 1. 𝑈∞ , valeurs expérimentales [1] et numériques [2,VOF-PLIC]
7.4.3 Modèles et méthodes numériques
Equations: Navier-Stokes, Incompressibilité, Advection (VOF-PLIC), tensions de
surface avec lissage de la fonction couleur (REGULARISATION)
Conditions aux limites : Axisymétrie, 3 parois et la limite de type symétrique
confondue avec l‘axe vertical interceptant le centre de la bulle. Voir Fig 2.
Méthode pour le couplage vitesse pression: Validation effectuée avec le Lagrangien
[2]

179
Augmenté automatique.
Solveurs: MUMPS, vérifié dans les versions parallèles et séquentielles.
Maillages : cartésiens réguliers, excepté un raffinement sur l‘axe nécessaire pour la
régularité de l‘interface dans la version axisymétrique du code.
Caractéristiques des fluides : Cas-Test configuré pour reproduire le cas A3 (Cf. Table
1) g =1.293 Kg.m−3, f =1000 Kg.m−3
, g =1.85×10-5
Pa.s, f =1.109×10-1
Pa.s,
σ=1.219×10-1
N.m−1.
Nombres caractéristiques : Nombre de Bond Bo=Bo*= 32.2, Nombre de Reynolds
basé sur la vitesse 𝑅𝑒 = 𝜌𝑓𝑈∞𝑑/𝜇𝑓 = 55.3, Nombre de Reynolds non-dimensionnel
𝑅𝑒∗ = 𝜌𝑓 𝑔 𝑑3
/ 𝜇𝑓 = 79.9 (non basé a posteriori sur la vitesse, utilisé plus
généralement sous la forme du nombre de Galilée 𝐺𝑎 = |𝜌 − 1|𝑔𝑑𝑝3 𝜌𝑓/𝜇𝑓)
7.4.4 Fichiers de données associés
bulle2daxi_la.don
7.4.5 Résultats et commentaires
Le cas-test fourni avec cette fiche doit permettre de prédire la vitesse limite expérimentale
UEXP de la bulle avec une marge de moins de 13% d‘erreur. (maillage 300×57) et une forme
caractéristique de calotte sphérique (fond plat). Sur ce cas le meilleur maillage produit une
erreur de l‘ordre de 4% (voir Table 2). On impose une CFL de 0.3 qui avec un pas d‘espace
de 8.0×10-4
[m] dans la bulle fixe un pas de temps Δt=0.3.Δx/UEXP=8.0×10-4
[s].
Nx Nz Vitesse (U Exp) Erreur %
Richardson N=√(Nx.Nz) LN(N) LN(Erreur)
150 33 3.9489E-01 (3,0665E-01) 35.93% 70 4,253571428 3,545786596
300 57 3.4352E-01 " 18.24% 131 4,873416871 2,900197379
600 104 3.1308E-01 " 7.77% 250 5,520660277 2,056459336
1200 198 2.9945E-01 " 3.08% 487 6,189171933 1,296732638
2400 388 2.9405E-01 " 1.22% 965 6,872114678 0,483266135
Richardson 2.9051E-01
0%
Ordre 1.3
Table 2. Cas A3, calcul de l’ordre en espace par extrapolation de Richardson au temps t=0,46 [s]
Le code converge manifestement vers une valeur peu différente de la valeur expérimentale.
Le calcul de l‘ordre de convergence par extrapolation de Richardson montre une convergence
très régulière pour un ordre légèrement supérieur à 1 (1.3) ce qui indique que la convergence
quadratique du code est altérée par la méthode de transport d‘interface probablement, qui est
d‘ordre 1 pour des cas complexes. La convergence de la morphologie de la bulle est
également reportée sur la figure ci-contre :

180
Fig. 4. Convergence Espace Cas A3 Parallèle
On rappelle que les références pour le cas de validation sont basées sur la valeur de l‘énergie
cinétique totale du système qui s‘intègre plus facilement que le calcul de la vitesse de
l‘inclusion obtenue en post-traitement. L‘énergie cinétique totale augmente de façon quasi-
linéaire avec le temps jusqu‘à ce que la bulle perçoive la paroi supérieure. On place notre
mesure dans cette zone linéaire au temps de référence tr=0.46[s], et pour la grille 300×57 on
mesure une valeur Ectr= 0.6070704250755E-01± 2%
L‘incertitude est basée sur l‘amplitude de l‘énergie cinétique de la bulle, trop faible et trop
bruitée pour constituer un signal valable.
Une amélioration de ce cas-test est nécessaire: la correction d‘un problème lié à l‘axisymétrie
qui a tendance à produire des survitesses au niveau de l‘axe, on le remarque facilement sur
des bulles rigides avec la présence d‘un gradient de pression incohérent sur l‘axe au sommet
et au dos de la bulle. Une première correction permet de redresser l‘interface sur l‘axe et
d‘améliorer notablement la dynamique, mais certaines bulles sont encore exagérément
pointues (voir Fig. 3).
7.4.6 Références
[1] D. Bhaga et M. Weber, ―Bubbles in Viscous Liquids: Shapes, Wakes and Velocities,‖
Journal of Fluid Mechanics, vol. 105, 2006, pp. 61-85.
[2] J. Hua et J. Lou, ―Numerical simulation of bubble rising in viscous liquid,‖ Journal of
Computational Physics, vol. 222, Mar. 2007, pp. 769-795.

181
7.5 Benchmark pour l’évolution d’une bulle 2D (N)
7.5.1 Intérêt
Cette validation dans un domaine bidimensionnel confiné permettra de vérifier rapidement le
bon fonctionnement de l‘algorithme de transport d‘interface avec le couplage vitesse-pression
en incompressible et l‘introduction de termes liés aux tensions de surfaces. Par rapport au cas
de la bulle axisymétrique assimilable à une configuration réelle, ce cas est un benchmark à
deux dimensions tout à fait virtuel. Il servira de la même façon à valider la prise en compte
d‘inclusions mobiles et déformables sous l‘action de forces capillaires, mais avec une
précision beaucoup plus grande car cette fois la validation se base sur des prédictions
numériques provenant de plusieurs codes de calculs.
7.5.2 Description
On considère une inclusion de gaz initialement circulaire de rayon r0 libérée dans un liquide
visqueux au repos. Sous l‘action de la force d‘Archimède, cette bulle acquiert une vitesse
verticale ascendante. Pendant la phase d‘accélération les forces de flottabilité, de traînée et de
capillarité entrent en compétition en altérant la morphologie et la cinétique de la bulle.
Différents types de conditions aux limites peuvent induire des déviations considérables du
comportement de la bulle. Ce benchmark impose des conditions aux limites simples de type
paroi et symétrie disposées suivant le schéma de la Figure 1. Cette géométrie implique un
confinement évident de la bulle dans les deux directions. De ce fait le phénomène observé
sera complètement instationnaire, il n‘y aura pas de stabilisation de la vitesse ni de la forme
de l‘inclusion. Ce benchmark est l‘objet des travaux de Hysing et Al. [1] qui compare les
résultats de trois codes de calcul différents. Pour caractériser le régime hydrodynamique de ce
cas-test les auteurs introduisent le nombre de Reynolds 𝑅𝑒 = 𝜌𝑓 𝑈𝑔𝑟𝑎𝑣 2𝑟0/𝜇𝑓 et le nombre
de Bond (ou Eötvös) 𝐵𝑜 = 𝜌𝑓𝑈𝑔𝑟𝑎𝑣22𝑟0/𝜍, où 𝜌𝑖 et 𝜇𝑖 représentent la masse volumique et la
viscosité dynamique de la phase fluide i=f ou gazeuse i=g , g la gravité, σ la tension
superficielle de la phase gazeuse par rapport à la phase liquide, et 𝑈𝑔𝑟𝑎𝑣 = 𝑔2𝑟0 la vitesse
gravitationnelle de la bulle. La classification complète du cas-test nécessite aussi
l‘intervention des ratios de masse volumique 𝜌𝑓/𝜌𝑔 et de viscosité dynamique 𝜇𝑓/𝜇𝑔 . Les
auteurs ont défini deux configurations aboutissant à des morphologies de bulles différentes,
ces configurations sont décrites dans la Table 1 et la Figure 2. Les nombres caractéristiques
sont basés sur un rayon initial r0=0.25.
Cas-test 𝜌𝑓 𝜌𝑔 𝜇𝑓 𝜇𝑔 g σ Re Bo 𝜌𝑓/𝜌𝑔 𝜇𝑓/𝜇𝑔
(i) 1000 100 10 1 0.98 24.5 35 10 10 10
(ii) 1000 1 10 0.1 0.98 1.96 35 125 1000 100
Table 1. Propriétés physiques S.I.

182
Cas-test (i)
Cas-test (ii)
Fig 1. Configuration du benchmark [1]
Fig 2. Forme de la bulle
au temps t =3s, voir [1]
Notons que les trois codes de calcul donnent des résultats indiscernables à l‘œil pour le cas-
test (i). En revanche le cas-test (ii) montre des différences sensibles du fait de l‘aspiration
d‘un film de gaz très fin dans le sillage de la bulle, avec une forte probabilité de fragmentation
de ce film, qui peut-être d‘origine physique ou numérique. Si ce dernier cas peut-être utile
pour discriminer les méthodes et peut-être aussi pour mieux comprendre la modélisation de la
fragmentation d‘interfaces, le cas-test (i) se prête de façon idéale à la définition d‘un cas de
validation pour Thétis. Cette validation doit à la fois porter sur la forme et la cinétique de la
bulle. Les auteurs définissent une série de critères très précis, qui sont la position du centre de
masse (CdM ou centroïde), de la vitesse et de la circularité de la bulle. Le CdM s‘obtient via
une moyenne volumique, sa vitesse peut s‘obtenir soit par dérivation, soit par une moyenne
volumique des vitesses. Nous optons pour la deuxième solution, car la dérivation introduit du

183
bruit notamment. La circularité au temps t représente le rapport entre le périmètre du cercle
initial et le périmètre de la bulle au temps t.
7.5.3 Modèles et méthodes numériques
Equations: Navier-Stokes, Incompressibilité, Advection (VOF-PLIC), tensions de
surface et moyennes utilisées via la fonction couleur régularisée
(REGULARISATION)
Conditions aux limites : 2 parois opposées, et symétrie (Cf. Fig 1.)
Méthode pour le couplage vitesse pression: Vérification effectuée avec la correction
de pression (validité vérifiée pour la version 1.0 avec le Lagrangien Augmenté
automatique)
Solveurs: MUMPS, vérifié dans les versions parallèles et séquentielles
Maillage : cartésien régulier
Caractéristiques des fluides : Cas-Test configuré pour reproduire le cas (i) (Cf. Table
1.) g =100 Kg.m−3
, f =1000 Kg.m−3
, g =1 Pa.s, f =10 Pa.s, σ=24.5 N.m−1
.
Nombres caractéristiques : Nombre de Bond Bo=10, Nombre de Reynolds basé sur la
vitesse gravitationnelle Re=35, rapports des densités et des viscosités égaux à 10.
7.5.4 Fichiers de données associés
bulle2d_cpre.don
7.5.5 Résultats et commentaires
Le fichier de donnée fourni avec cette fiche doit permettre de restituer précisément la
cinétique et l‘évolution de la forme dans le temps d‘une bulle bidimensionnelle, sur la base de
simulations numériques issues de la littérature.
En guise de démonstration, la Figure 3 représente les résultats du code quant à l‘évolution de
la forme, de la circularité, de la position et de la vitesse du centroïde de la bulle, en
comparaison aux données du code TP2D [1] à résolution maximale. La physique du
phénomène est capturée avec précision, bien que le maillage soit ici très grossier (pour info:
maillage 40×80, on vise une condition de CFL d‘environ 0.1 ce qui avec un pas d‘espace de
2.5×10-2
[m] dans la bulle fixe un pas de temps tel que Δt≈0.1.Δx/UMAX≈1×10-2
[s]).
Pour le calcul de l‘ordre de convergence en espace, on utilise la vitesse maximale de remontée
de la bulle. A la manière de la méthode décrite dans [1], on utilise quatre maillages avec une
extrapolation de Richardson. Les résultats présentés dans la Table 2 montrent une
convergence nette à l‘ordre 1.3, ce qui reste cohérent et même en progrès par rapport aux
résultats du cas-test 2D axisymétrique. La dernière ligne de la Table 2 montre qu‘à
convergence, l‘erreur relative à la référence TP2D [1] est inférieure à 2% (1.2%).

184
Fig. 3. Cas Bulle2d.don, maillage 40×80, pas de temps 7×10
-3 [s]. Rouge : Thétis1.0, noir:
code tp2d[1], résolution maximale en temps et en espace. De gauche à droite et de haut en
bas: forme de la bulle au temps t=3s, circularité, position du centroïde, vitesse du centroïde.
Nx Nz Vitesse Max Vmax [1] Erreur/Rich. % N=√(Nx.Nz) LN(N) LN(Erreur)
40 80 0.23791 - 0.66% 57 4.03545 -5.02777
80 160 0.23895 - 0.22% 113 4.72860 -6.12207
160 320 0.23926 - 0.09% 226 5.42175 -6.98629
320 640 0.23938 - 0.04% 453 6.11489 -7.85051
Richardson 0.23948 0.24230 1.20%
Ordre 1.35000
Table 2. Cas Bulle2d.don, calcul de l’ordre en espace par extrapolation de Richardson. La
valeur de référence [1] est la vitesse verticale maximum de remontée de la bulle
Pour simplifier la procédure de validation, les valeurs de références pour le cas de validation
sont basées sur la valeur de l‘énergie cinétique totale du système qui s‘intègre plus facilement
que le calcul de la vitesse de l‘inclusion obtenue en post-traitement. Dans cet espace confiné
l‘énergie cinétique totale augmente de façon rapide jusqu‘à tr=2 [s] puis se stabilise avant de
se dissiper. On place notre mesure au temps de référence tr=3 [s] qui correspond à la fin de la
simulation sur le fichier de donnée. Pour la grille de taille 40×80 on mesure une valeur de
l‘énergie cinétique totale de 0.203026780806518E+02 [J], fournie par l‘utilitaire « Energie
Cinétique Totale ». Pour plus de sécurité on peut coupler ce test avec le contrôle de la
Centroïd position

185
conservation du volume de la bulle obtenue à l‘aide de l‘utilitaire déjà implémenté « Diff.
Volume » : -0.1347165406914800E-02
Les résultats précédents prouvent que ce cas se prête parfaitement à la validation du code dans
le cas d‘interfaces soumises à des forces capillaires. Les résultats numériques issus de la
littérature montrent un accord remarquable pour le cas(i). Les résultats de Thétis sont tout à
fait honorables bien qu‘il soit encore possible d‘améliorer les résultats convergés. La très
grande précision des références [1] devraient permettre une configuration plus fine des
méthodologies impliquées. Un effort devrait être produit prochainement dans cette direction
avant de proposer les résultats de Thétis à la communauté (possibilité de participer à une
bibliothèque de résultats numérique en ligne sur un site géré par S.R. Hysing)
7.5.6 Références (et fichiers si disponibles via Zotero)
[1] S. Hysing, S. Turek, D. Kuzmin, N. Parolini, E. Burman, S. Ganesan, et L. Tobiska,
―Quantitative benchmark computations of two-dimensional bubble dynamics,‖ International
Journal for Numerical Methods in Fluids, vol. 9999, 2008, p. n/a.


187
7.6 Sédimentation d’une particule solide en 2D (A)
7.6.1 Intérêt
Ce cas consiste principalement à valider la prise en compte de particules solides et mobiles
introduites par l‘application de la technique de pénalisation du tenseur des contraintes
visqueuses. Cette validation dans un domaine bidimensionnel confiné permettra de vérifier
rapidement le couplage de l‘algorithme de transport d‘interface VOF-CIAM avec la méthode
du Lagrangien Augmenté adaptatif (utilisé pour la pénalisation des contraintes visqueuses et
la pénalisation de l‘incompressibilité), dans le cas du transport d‘une interface rigide, sans
forces de tension de surface, séparant deux milieux de densités sensiblement différentes.
7.6.2 Description
La définition et les résultats de ce benchmark ont étés publiés dans [3]. Il s‘agit d‘une
validation basée sur une solution analytique approchée proposée par Faxén [1], solution dont
le domaine de validité a été discuté et étendu [3].
Le paradoxe de Stokes démontre qu‘il n‘existe pas de solution analytique pour les équations
de Stokes dans le cas d‘un cylindre immergé dans un milieu infini, une difficulté levée par
Lamb [2] qui a utilisé le formalisme d‘Oseen (introduction d‘un terme inertiel dans les
équations de Stokes) pour approcher la solution du problème en deux dimensions. Les travaux
de Faxén [1] proposent sur cette même base une solution analytique pour la force de traînée
exercée sur un cylindre de rayon a en déplacement entre deux parois planes infinies séparées
d‘une distance 2l (Figure 1).
Figure 1. Configuration géométrique dans le cas semi-infini
La loi de traînée résultante est valable à Reynolds faible 𝑅𝑒𝑝 = 𝑑𝑝𝜌𝑓 𝑈∞/𝜇𝑓 ≤ 𝑂(1). De
simples calculs permettent de remonter à la vitesse Uc de la particule définie à partir du
contraste en densité =p /f, de la viscosité du fluide f, de l‘accélération de la gravité g, et
du coefficient de confinement f(kx) où kx=a/l représente le rapport d‘aspect selon la direction
x :
𝑈𝑐 = 1 − 𝜌 𝜌𝑓𝑔𝑎2
4𝜇𝑓𝑓 𝑘𝑥 ,
𝑓 𝑘𝑥 = −0.9157 − ln 𝑘𝑥 + 1.7244𝑘𝑥2 − 1.7302𝑘𝑥
4. (1)

188
Les simulations numériques directes réalisées ont permis d‘éprouver les limites de la solution
analytique pour finalement constater que :
(i) Le développement de Faxén n‘est valable que dans la gamme restreinte de
confinement kx [0.01,0.4],
(ii) Dans cette même gamme de confinement, le coefficient de traînée de la particule en
l‘absence d‘accélération (Uc=Cste
) est manifestement le même dans le cas semi-infini
(Figure 1) et dans le cas confiné (Figure 2), permettant d‘établir un cas 2D totalement
confiné se prêtant idéalement à la validation d‘une méthode de simulation numérique
directe.
Figure 2. Configuration géométrique dans le cas confiné
7.6.3 Modèles et méthodes numériques
Équations : Navier-Stokes incompressible, advection (résolue par la méthode VOF-PLIC)
Conditions aux limites : la particule cylindrique de rayon a est initialement libérée avec
une vitesse nulle dans un fluide au repos au centre d‘une cavité carrée d‘arête 2l (Cf.
Figure 2). Les conditions aux limites pour les quatre parois sont toutes des conditions
d‘adhérence. Pour un faible nombre de Reynolds 𝑅𝑒𝑝 ≤ 𝑂(1) le système admet une
symétrie par rapport à l‘axe x=0. Le cas-test comporte une condition de symétrie à droite
et une condition de type paroi pour les autres limites.
Méthode pour le couplage vitesse pression : validation effectuée avec le Lagrangien
Augmenté Adaptatif [4] et le Lagrangien Augmenté automatique.
Solveurs : BiCGStab(2), MUMPS dans des versions parallèles et séquentielles.
Maillages : cartésiens réguliers (64x128 pour le cas-test type sedim2d.don).
Caractéristiques des fluides : validations sur un critère d‘erreur inférieur à 5% [3] pour un
tirage aléatoire de caractéristiques comprises dans les intervalles suivants p et
f [100,1000] Kg.m−3
, f [1,10] Pa.s, p automatique.
Nombres caractéristiques : validations sur un critère d‘erreur inférieur à 5% pour

189
l‘ensemble des caractéristiques précédentes, traduites en terme de nombres
adimensionnels Ga < 1 (*), [0.1,10] kx[0.01, 0.3].
(*) Remarque : le nombre de Galilée 𝐺𝑎 =
𝜌𝑓
𝜇𝑓 |𝜌 − 1|𝑔𝑑𝑝
3 remplace ici le nombre de Reynolds
particulaire qui ne peut être estimé qu‘a posteriori d‘après la vitesse de la particule prédite par
la simulation. On montre [3] qu‘à l‘instar d‘écoulements à bulles, le couple (nombre de
Reynolds particulaire, nombre de Stokes) ou le couple (nombre de Galilée, rapport de densité)
sont équivalents et suffisent à caractériser le régime d‘écoulement.
7.6.4 Résultats et commentaires
L‘équation 1 permet de calculer les valeurs de référence. Pour le cas-test type (sedim2d.don)
la vitesse numérique de la particule est UcMAX
=-0.0506 m.s-1
, soit une erreur relative d‘environ
3.5% par rapport au modèle de Faxèn d‘ordre 8, pour un maillage de taille 64×128 et dp~16
(confinement de 1/8). La valeur numérique de l‘énergie cinétique maximale du système vaut
EcMAX
=0.0027554 J.
La convergence en espace est effective dans le cas présent, mais un ordre en espace n‘a pas pu
être clairement dégagé, notamment à cause du bruit numérique généré par la migration de
l‘interface à travers le maillage, mais surtout à cause de l‘absence d‘état stationnaire pour ce
cas. Jusqu‘ici d‘une manière globale on a observé pour les cas d‘interface mobile (VOF-
PLIC) une convergence en espace de l‘ordre de 1.3 [3].
Voici quelques améliorations qui restent à réaliser pour ce cas-test : (i) Validation des
méthodes de transport d‘interface VOF-TVD, VOF-LAG, FTR, VSM (ii) Mise en valeur
claire de l‘ordre de convergence en espace avec chaque type de transport et de moyennes. (iii)
déterminer l‘influence réelle des moyennes : ici la moyenne M5 (arithmétique pour la masse,
harmonique pour la viscosité) est pour l‘instant la plus efficace pour les inclusions solides.
7.6.5 Fichiers de données associés
Le fichier est sedimentation2d_la.don.
7.6.6 Références
[1] J. Happel et H. Brenner, Low Reynolds Number Hydrodynamics: with special applications
to particulate media, Springer, 1 edition, 1983.
[2] B. Huner et R.G. Hussey, ―Cylinder drag at low Reynolds number,‖ Physics of Fluids,
vol. 20, 1977, pp. 1211-1218.
[3] G. Pianet et E. Arquis, ―Simulation of particles in fluid: a two-dimensional benchmark for
a cylinder settling in a wall-bounded box,‖ European Journal of Mechanics - B/Fluids, vol.
27, 2008, pp. 309-321.
[4] S. Vincent et al., ―An adaptative augmented Lagrangian method for three-dimensional
multimaterial flows,‖ Computers & Fluids, vol. 33, Déc. 2004, pp. 1273-1289.


191
7.7 Etalement d’une lentille : prise en compte de la ligne triple (A, N)
7.7.1 Intérêt
Ce cas traite de la validation des effets de tensions superficielles sur la ligne triple entre 3
fluides non miscibles. Il consiste principalement à valider les effets des forces de tensions
superficielles lorsque trois fluides non miscibles sont en contact et soumis aux forces de
gravité. On utilise le cas de la lentille décrit dans le livre de De Gennes [1] pour valider le
modèle numérique de traitement de la ligne triple, en étudiant l‘étalement partiel ou total de la
lentille. Cette validation est tridimensionnelle et permet de vérifier les épaisseurs
asymptotiques de la couche de liquide formant la lentille. Attention cette validation n‘est
valable que pour trois milieux fluides en contact et non pour deux milieux fluides et un solide.
On ne peut faire l‘étude de l‘angle de contact avec ce cas de validation.
7.7.2 Description
La validation est faite par rapport à une solution analytique [1], ou bien numérique [2]. On
considère une lentille de fluide (initialement, un demi-disque dans un plan médian et une
demi-sphère en 3D) posée sur une surface libre. Les conditions initiales sont décrites sur la
figure suivante :
Figure 1. Conditions initiales
On considère trois fluides non miscibles : A et B sont des liquides, C est un gaz.
Selon la théorie de De Gennes, on peut calculer l‘épaisseur ef asymptotique de la lentille dans
le cas d‘un étalement partiel :
7.7.3 Modèles et méthodes numériques
On utilise les équations de Navier-Stokes en formulation 1-fluide et un modèle de gestion de
la ligne triple dû à Cranga [3] qui est basé sur une superposition de forces de tensions
superficielles de type Brackbill [4].
Soit d le diamètre de la goutte (d=0.04m), initialement centrée en (0.12,0.03,0.12). Le
domaine est de dimension 6d x 1.5d x 6d. On initialise 1 parallélépipède de fluide B en
dessous de la goutte.

192
Toutes les conditions aux limites sont des parois. Le couplage vitesse pression est résolu par
la méthode du lagrangien Augmenté (séquentiel) ou la méthode de correction de pression
(Goda). Un schéma centré est utilisé ainsi que les solveurs BICG (seq) ou HYPRE BICG
(parallèle) et des maillages à variation exponentielle du pas d‘espace.
7.7.4 Résultats et commentaires
La figure suivante montre l‘épaisseur adimensionnelle de la goutte en fonction du temps
adimensionné. On retrouve la solution théorique de De Gennes.
Figure 2. Epaisseur adimensionnelle de la goutte en fonction du temps adimensionné.
Le tableau suivant donne l‘ordre de convergence spatiale local de la solution sur quatre
maillages. On vérifie l‘ordre formel des schémas sur le dernier maillage.
Maillage Erreur ef Erreur rel. (%) Ordre local
50x20x50 4,32E-03 4,97E-01
100x40x100 2,44E-03 2,80E-01 0,82
200x80x200 1,31E-03 1,50E-01 0,90
300x120x300 5.65E-04 6,50E-02 2,07
Tableau 1. Erreurs en fonction du maillage
La figure suivante reprend l‘épaisseur de la goutte en fonction du temps (non adimensionnés)
pour les différents maillages.
0.4
0.5
0.6
0.7
0.8
0.9
1
0 20 40 60 80
epaisseur adim
epaisseur th
sigma:fluide1 : 0.148 N/mfluide 2: 0.148 N/mfluide 3: 0.296 N/m

193
Figure3. Epaisseur de la goutte en fonction du temps (non adimensionnés)
7.7.5 Fichiers de données associés
Le fichier de données est lentille3d.don.
7.7.6 Références
[1] P.G. DeGennes, F.Brochard Wyart and D.Quéré. Gouttes, bulles, perles, et ondes, Belin,
2005.
[2] T.Bonometti, Développement d'une méthode de simulation d'écoulements à bulles et à
gouttes, Thèse de l’Institut National Polytechnique de Toulouse, 2005.
[3] J. Cranga, Simulation numérique directe d‘écoulements di- et tri-phasique engenders par
l‘injection de bulles dans un bain de metal liquid, Thèse de l’Institut National Polytechnique
de Toulouse, 2002
[4] J.U. Brackbill, B.D. Kothe and C. Zemach, A continuum method for modeling surface
tension, J. Comput. Phys., 100:335-354, 1992.


195
7.8 Essorage gravitaire (T)
7.8.1 Intérêt
On considère le dépôt d‘un film de zinc sur une tôle mobile lorsque celle-ci passe dans un
bain de zinc. Sous l‘effet de la gravité, le film déposé tend vers une épaisseur asymptotique
dont on connait la valeur selon des études expérimentales et théoriques. L‘intérêt de ce
problème est de valider le comportement du modèle 1-fluide, avec prise en compte des
tensions de surface, sur un écoulement diphasique.
7.8.2 Description
On étudie le mouvement d‘une tôle mobile qui emporte du zinc initialement au repos dans un
bain. L‘écoulement s‘effectue dans l‘air. L‘écoulement est laminaire (Re=205) et les effets de
tension de surface sont non négligeables (We=11.6). Dans notre configuration, la valeur
asymptotique attendue pour le film de zinc déposé sur la tôle est donnée par la formule
suivante due à Buchlin [2] et Lacanette [3] :
g
Ue
l
l
f
0
5176.0
Où ef est l‘épaisseur asymptotique, U0 la vitesse de la tôle, l la viscosité dynamique du zinc,
l sa masse volumique et g l‘intensité de la gravité. La vitesse de la plaque U0 est de 2 m/s. La
hauteur du bain de zinc est fixée à 14 cm et sa largeur à 5 mm. On impose la présence de zinc
dans la zone de bain au cours du temps. La gravité est orientée vers la gauche avec une
intensité de 9.81 m/s2. Le coefficient de tension superficielle est égal à 0.78 N/m, tandis que l
est égale à 6500 kg/m3 et l vaut 0.00317 Pa.s. L‘application numérique concernant
l‘épaisseur asymptotique donne ef=163 m.
Figure 1 : illustration de l’essorage gravitaire.
7.8.3 Modèles et méthodes numériques
On résout les équations de Navier-Stokes en formulation à un fluide, avec prise en compte des
tensions de surface via le modèle de Brackbill [1]. Le maillage utilisé est de type exponentiel

196
avec un resserrement sur la tôle mobile. Le maillage contient 300 x 250 points. Ce cas tourne
en séquentiel et les tests sont en cours en parallèle.
Concernant les méthodes numériques, on utilise la méthode du lagrangien augmenté constant
(DP=DR=10000) pour le couplage vitesse-pression, la technique de suivi d‘interface VOF-
TVD, avec anti-diffusion de la fonction couleur et un schéma HYBRIDE pour la
discrétisation du terme d‘inertie dans les équations de quantité de mouvement. Concernant
l‘inversion du système linéaire, une méthode directe est choisie (MUMPS).
7.8.4 Fichiers de données associés
Le fichier de données associé est ARC_graviraire.don.On utilise également l‘utilitaire de
calcul d‘épaisseur sur la tôle qui requiert le fichier toto.input, fichier contenant la coordonnée
selon x de l‘abscisse pour laquelle on estime l‘épaisseur du film de zinc.
7.8.5 Résultats et commentaires
Nous n‘avons pas mené d‘étude de convergence sur ce cas, mais nous avons cherché à
retrouver la valeur asymptotique de l‘épaisseur du film de zinc en aval du bain sur un
maillage donné, conciliant précision et temps de calcul raisonnable.
Figure 2 : interface entre le zinc (rouge) et l’air au bout de 1.5 s - maillage 300 x 250 et
calcul séquentiel.

197
Figure 3 : évolution de l’épaisseur ef du film déposé sur la tôle en fonction du temps- mesure
à x=0.7 m - maillage 300 x250 et calcul séquentiel.
La figure 2 montre la topologie de l‘interface zinc/air au bout de 1.5 s. On remarque que la
gravité induit un ruissèlement du zinc (écoulement de retour sous forme d‘ondes de surface)
vers le bain de zinc. L‘épaisseur asymptotique atteinte numériquement est la même que celle
prédite théoriquement. Plus précisément, si l‘on se réfère à la figure 3 qui montre l‘évolution
de l‘épaisseur du zinc à l‘abscisse x=0.7 m, on observe que l‘épaisseur numérique
asymptotique est de 330 microns, très proche de la valeur de référence ef=326,4 m.
7.8.6 Références
[1] J. U. Brackbill, B. D. Kothe & C. Zemach (1992). A continuum method for modelling
surface tension, Journal of Computational Physics, 100, p. 335–354.
[2] J. M. Buchlin (1985). Modelling of gas jet wiping. Technical report, Von Karman Institute
for Fluid Dynamics.
[3] D. Lacanette (2004). Simulation numérique de l‘essorage et du refroidissement d‘un film
liquide en mouvement par un jet plan turbulent, Thèse de mécanique, Université de Bordeaux.


199
7.9 Impact d’une goutte avec prise en compte de la mouillabilité (Exp,
N)
7.9.1 Intérêt Ce cas consiste principalement à valider les effets de mouillabilité sur une paroi plane ou
inclinée avec la prise en compte de l‘angle de contact, lors de la ligne triple entre une paroi,
une goutte et le fluide environnant. On utilise les expériences de Wang [1] sur une paroi plane
mouillante et non mouillante pour valider le modèle numérique des angles de contact, en
étudiant la hauteur et le diamètre de goutte au cours du temps. Cette validation est
tridimensionnelle et parallélisée. Cette validation n‘est valable pour l‘instant que pour des cas
à faible nombre de Weber, c'est-à-dire en régime de déposition selon la courbe (cf. figure 1)
de Mundo [2]. Les paramètres, définissant la courbe, sont le nombre de Reynolds en abscisse
(comparant l‘inertie aux forces visqueuses) et le nombre d‘Ohnesorge en ordonnée
(comparant les effets visqueux aux effets capillaires). Ainsi Mundo montre qu‘il existe un
coefficient K permettant de définir si nous sommes en régime de splash ou de déposition.
Figure 1. Courbe de Mundo [2]
7.9.2 Description On considère une goutte d‘eau sphérique impactant la paroi. L‘expérience consiste à impacter
une goutte d‘eau d‘un diamètre d à une vitesse V sur une surface en verre, donc mouillante,
puis sur une surface en paraffine, donc non mouillante. On détermine une hauteur de goutte et
un diamètre au cours du temps. Les fluides sont l‘air et un fluide fictif appelé « wang » de
caractéristiques =998.2 kg.m-3
et =1.005 10-3
Pa.s. Le nombre de Weber We=8 (ou 7.8), le
nombre de Reynold Re=1146.
Une représentation d‘une goutte impactant la paroi mouillante est donnée sur la figure 2 ainsi
que la définition de la hauteur de la goutte et de l‘angle de contact.

200
Figure 2. Impact d’une goutte sur une paroi mouillante.
7.9.3 Modèles et méthodes numériques On utilise les équations de Navier-Stokes en formulation 1-fluide. La fonction de phase du
modèle VOF-PLIC est régularisée [3]. Le modèle de tension de surface est le modèle de
Brackbill [4]. La propriété de mouillabilité sur la paroi est définie numériquement par le
paramètre Cparoi (0 ≤ Cparoi ≤ 1) :
- Cparoi =0 : effet non mouillant ( angle de contact 170°)
- Cparoi =1 : effet totalement mouillant (angle de contact 0°)
- 0 ≤ Cparoi ≤ 1 : une fonction de corrélation θ(Cparoi ) est faite entre la valeur de Cparoi et
l‘angle de contact
Les conditions aux limites sont de type « paroi » pour toutes les limites. Une sphère de liquide
de rayon 1.05 10-3
m est initialisée en (0,1.11 10-3
). Le domaine est de dimension
6D x 1.5D x 6D ou D est le diamètre initial de la goutte.
Le couplage vitesse/pression est résolu par la méthode de correction de pression (Goda). Un
schéma centré est utilisé pour le terme d‘inertie. Ce cas a été réalisé en parallèe dans la
version parallèle du code sur un maillage à variation exponentielle du pas d‘espace de
120x80x120 mailles, avec une plus petite maille de hauteur égale à 20 10-6
m.
7.9.4 Résultats et commentaires Deux simulations sont réalisées. La première représente le cas mouillant de l‘impact d‘une
goutte d‘eau sur du verre. Wang effectue des mesures d‘angles de contact variant entre 20° et
40°. Ainsi nous fixons l‘angle de contact à 28°. Les autres caractéristiques de l‘expérience
sont :
- Diamètre de goutte : 2.2 mm
- Vitesse impact : 514 mm/s
- Re = 1121 ; We = 8 ; Oh = 0.0025 ; = 72 mN/m
La figure 3 montre une bonne concordance entre la simulation et l‘expérimentale sur
l‘évolution du diamètre et de la hauteur de la goutte au cours du temps. La figure 4 représente
les isosurfaces de la fonction de phase à différents instants de la simulation.

201
Figure 3. Comparaison des diamètre et hauteur de goutte au court du temps dans le cas
mouillant.
Figure 4. Isosurface de la fonction de phase à différents instants (cas mouillant). La première
image est à T=4 10-4
s et le t entre chaque image est de 4 10-4
s.
La seconde simulation représente le cas non mouillant de l‘impact d‘une goutte d‘eau sur de
la paraffine. Wang effectue des mesures d‘angles de contact variant entre 80° et 130 °
montrant une stabilité de l‘angle au cours du temps entre 110° et 130°. Ainsi, nous fixons
l‘angle de contact à 120°. Les autres paramètres de l‘expérience sont :
- Diamètre de goutte : 2.12 mm
- Vitesse impact : 517 mm/s
- Re = 1089 ; We = 7.8 ; Oh = 0.0025 ; = 72 mN/m
La figure 5 montre une bonne concordance entre la simulation et l‘expérimentale sur
l‘évolution du diamètre et de la hauteur de la goutte au cours du temps lors de l‘avancement
de la goutte mais aussi lors du retour. La figure 6 représente les isosurfaces de la fonction de
phase à différents instants de la simulation.
0
1
2
3
4
5
6
7
8
0 2 4 6 8 10 12
d wangh wangd simh sim
angle de contact 28°
Temps (ms)

202
Figure 5. Comparaison des diamètreset hauteur de goutte au court du temps dans le cas non
mouillant.
Figure 6. Isosurface de la fonction de phase à différents instants (cas mouillant). La première
image est à T=4 10-4
s et le t entre chaque image est de 4 10-4
s
7.9.5 Fichiers de données associés Le fichier de données est mouillabilite.don.
7.9.6 Références [1] Wang M., Lin F., and Lin S. Dynamic behaviors of droplet impact and spreading - water
on glass and paraffin. Colloids and Surfaces a: Physicochemical and Engineering Aspects,
339, 224–231, 2009.
0
0.5
1
1.5
2
2.5
3
3.5
4
0 2 4 6 8 10
dsim2hsim2h wangd wang
angle contact 120°
Temps (ms)
Diamètre (d) et
hauteur (h) en mm

203
[2] Mundo, Sommerfeld & Tropea, droplet wall collisions: experimental studies of
deformation and breakup process, Int. J. Multiphase Flow, vol. 21, p 151-173, 1995.
[3] JP.Caltagirone, S.Vincent, R.Guillaument, A new numerical method for handling wetting
effects in VOF approaches. En cours de redaction.
[4] J.U. Brackbill, B.D. Kothe and C. Zemach, A continuum method for modeling surface
tension, J.Comput.Phys, 100:335-354, 1992.
[5] R.Guillaument, S.Vincent, JP.Caltagirone, J. Duclos, Modélisation 1-Fluide de l‘angle de
contact et de la ligne triple. Application à l‘impact d‘une goutte d‘émulsion sur une paroi,
19ième
Congrès Français de Mécanique Marseille, 24-28 août 2009


205
7.10 Croissance d’une instabilité capillaire dans un champ de
pesanteur
7.10.1 Intérêt
La croissance d'une instabilité capillaire, générée à l'interface par la tension superficielle entre
chaque phase est le phénomène physique responsable de la rupture d‘un jet diphasique en
gouttes, appelé aussi régime de Rayleigh. Les travaux de Plateau et Rayleigh ont permis de
relier le taux de croissance w de la perturbation avec son nombre d'onde k. Cette relation de
dispersion met en évidence l'existence d'un nombre d'onde privilégié pour lequel le taux de
croissance est maximal. Dans le cas d'un jet liquide non-visqueux ce nombre d'onde optimal,
que l'on adimensionne avec le rayon du jet, vaut 0.7 [1]. Le but de ce cas-test est donc de
réaliser différentes simulations d'instabilité capillaire afin de retrouver la courbe de dispersion
théorique.
7.10.2 Description
Il s'agit ici de simuler l'évolution temporelle d'une instabilité de Rayleigh-Plateau se
propageant à l'interface entre de l'eau et de l'air. Le système considéré est à température
ambiante et à pression atmosphérique. La gravité est négligée et l'écoulement est supposé
incompressible. Les propriétés physiques des fluides sont : air=1.25 kg/m3 ; eau=1000
kg/m3 ; =0.07 N/m où est la tension superficielle entre les deux fluides.
Le phénomène étudié étant axisymétrique et périodique, on choisit de travailler avec un
domaine 2D axisymétrique dont la longueur est égale à la longueur d'onde de la perturbation.
Le rayon de la phase aqueuse vaut initialement 0,333 mm et la hauteur totale du domaine est
égale à 1 mm. La longueur du domaine est L=n*h où n est un réel positif non nul.
A l'instant initial, on applique à l'interface une perturbation de la forme [2] :
L'amplitude est choisie égale à une maille afin de rester dans le cadre de la théorie linéaire des
instabilités capillaires. On récupère dans un fichier l'amplitude maximale à chaque itération.
On calcule ensuite le taux de croissance grâce à la relation:
, avec l‘amplitude maximale de la perturbation à l‘instant .
7.10.3 Modèles et méthodes numériques:
Le modèle 1-fluide est utilisé. Le transport d‘interface est résolu par ka méthode VOF-PLIC.
Conditions limites : sup=paroi, inf=symétrie, périodique à gauche et à droite.
Le couplage vitesse/pression est résolu par la méthode du Lagrangien augmenté. Le solveur
utilisé est MUMPS.

206
Maillages :
- carré pour les grands nombres d'ondes ka>0.3. Maillage n*61 61 ; Dimension de la maille:
dx=dy=1/61000 m.
- expo pour ka <0.3: 2n*61 61 ; raffinement au voisinage de l'interface. 11 mailles entre
y=0.32 mm et y=0.3528 mm. 16 mailles pour le domaine inférieur et 34 pour le domaine
supérieur.
7.10.4 Résultats et commentaires
La figure 1 représente le développement de l'instabilité à différents instants pour le mode le
plus amplifié (à priori) à savoir , soit pour une longueur d'onde égale à 3 fois la
hauteur du domaine. La perturbation reste symétrique et conduit à la fragmentation de la
phase liquide comme cela était prévisible. De plus, les simulations réalisées pour les grands
nombres d'ondes ( ) n'ont pas entraîné de rupture ce qui corrobore pleinement la
théorie linéaire des instabilités capillaires: En effet, la figure 2, représentant la courbe de
dispersion, indique une extinction de la croissance de la perturbation lorsque .
L'interface entre les fluides se contente donc d'osciller. On retrouve le taux de croissance
maximum pour et les différentes valeurs obtenues à partir des simulations sont
proches de celles prédites par la théorie.
Figure 1 : croissance d’une instabilité capillaire au cours du temps. ka=0.7, il s’agit donc du
cas pour lequel le taux de croissance est maximal.

207
Figure 2 :courbe de dispersion entre le taux de croissance et le nombre d’onde adimensionné
Points = Résultats numériques Courbe = courbe de dispersion prédite par la théorie de
Rayleigh.
Figure 3 : évolution du taux de croissance en fonction du temps pour ka=0.7
Comme le montre la figure 3, le taux de croissance augmente linéairement au début avant de
tendre vers une valeur asymptotique. C‘est cette dernière que nous considérons pour
construire la courbe de dispersion ―simulée‖.
7.10.5 Fichiers associés
Le fichier de données est instabilite_capillaire.don.
7.10.6 Bibliographie:
[1] Eggers J., Villermaux E., Physics of liquid jets, Rep. Prog. Phys., 71(2008) 036601
(79pp).
[2] Tanguy S., Développement d‘une méthode de suivi d‘interface. Applications aux
écoulements diphasisques, Thèse d’énergétique, Université de Rouen, 2004.