Embed Size (px)
Citation preview

1
R. Sancibrián, Ing. Mecánica
1
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capitulo IICapitulo IICapitulo IICapitulo II
Teoría de curvatura
R. Sancibrián, Ing. Mecánica
2
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capitulo IICapitulo IICapitulo IICapitulo IIMovimiento PlanoMovimiento PlanoMovimiento PlanoMovimiento Plano
II.1 Aspectos generales del movimiento plano.II.1 Aspectos generales del movimiento plano.II.1 Aspectos generales del movimiento plano.II.1 Aspectos generales del movimiento plano.II.2 Teoría de la curvatura.II.2 Teoría de la curvatura.II.2 Teoría de la curvatura.II.2 Teoría de la curvatura.
1. Teorema de Hartman.2. Euler-Savary.3. Circunferencia de inflexiones y circunferencia
de Bresse.4. Construcciones gráficas.5. Teorema de Bobillier y construcción de
Aronhold.6. Generalización de la fórmula de Euler-Savary.7. Aplicaciones de la fórmula de Euler-Savary.
II.3 Estudio del mecanismo cuadrilátero articulado.II.3 Estudio del mecanismo cuadrilátero articulado.II.3 Estudio del mecanismo cuadrilátero articulado.II.3 Estudio del mecanismo cuadrilátero articulado.

2
R. Sancibrián, Ing. Mecánica
3
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capitulo II: Tema 2Capitulo II: Tema 2Capitulo II: Tema 2Capitulo II: Tema 2Teoría de curvaturaTeoría de curvaturaTeoría de curvaturaTeoría de curvatura
1. Teorema de Hartman.1. Aspectos previos del Teorema de Hartman.2. Enunciado y demostración del Teorema de Hartman.
2. Euler-Savary.1. Fórmula de Euler-Savary.2. Criterio de signos.
3. Circunferencia de inflexiones y circunferencia de Bresse. 1. Circunferencia de las inflexiones.2. Circunferencia de Bresse y polo de aceleraciones.
4. Construcciones gráficas.1. Construcción gráfica 1.2. Construcción gráfica 2.
5. Teorema de Bobillier y construcción de Aronhold.1. Teorema de Bobillier.2. Teorema de Aronhold.
6. Generalización de la fórmula de Euler-Savary.1. Introducción. Perfiles conjugados.2. Euler-Savary generalizado.3. Fórmula de E-S generalizado.
7. Aplicaciones de la fórmula de Euler-Savary.
R. Sancibrián, Ing. Mecánica
4
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2
1. Teorema de Hartman.1. Aspectos previos del Teorema de Hartman.2. Enunciado y demostración del Teorema de Hartman.

3
R. Sancibrián, Ing. Mecánica
5
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
En este apartado vamos a estudiar el teorema de Hartman que nos permitirá obtener la relación entre un punto del plano móvil, el polo de dicho plano móvil y el centro de curvatura de la trayectoria recorrida por el punto.
Pero antes introducimos en el teorema de Hartman existen algunas cuestiones preliminares que nos ayudarán a entender dicho teorema.
En esta introducción al teorema de Hartman vamos a considerar 3 planos en el movimiento:
• El plano fijo (0).• El plano móvil (1) que contiene el punto A el cual recorre la trayectoria m sobre
el plano fijo (0).• El plano móvil (2) compuesto por la normal (n) y la tangente (t) a la trayectoria y
que tiene un punto de coincidencia con el plano (1) que es el punto A.
R. Sancibrián, Ing. Mecánica
6
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
El plano fijo (0) El plano móvil (1) El plano móvil (2)
A
(1)
t
n
n
t
(2)

4
R. Sancibrián, Ing. Mecánica
7
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
Movimiento del plano 1 sobre el plano 0Movimiento del plano 1 sobre el plano 0Movimiento del plano 1 sobre el plano 0Movimiento del plano 1 sobre el plano 0
Condición:Condición:Condición:Condición: que el punto A del plano 1 recorra la trayectoria m del plano 0.
A continuación se muestran dos casos y se comparan.
R. Sancibrián, Ing. Mecánica
8
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
mA
(1)
VA
P10
(0)
mA
(1)
VA
P10
ω1ω = 0

5
R. Sancibrián, Ing. Mecánica
9
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
A
(1)
VA
P10
(0)
m
A
(1)
VA
P10
ω1 ω = 0
R. Sancibrián, Ing. Mecánica
10
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
A
(1)
VA
P10
(0)
m
A
(1)
VA
P10
ω1 ω = 0

6
R. Sancibrián, Ing. Mecánica
11
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
A
(1)
VA
P10
(0)
m
A
(1)
VA
P10
ω1 ω = 0
R. Sancibrián, Ing. Mecánica
12
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
A
(1)
VA
P10
(0)
m
A
(1)
VA
P10
ω1ω = 0

7
R. Sancibrián, Ing. Mecánica
13
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
A
(1)
VAP10
(0)
m
A
(1)
VAP10
ω1
ω = 0
R. Sancibrián, Ing. Mecánica
14
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
mA
(1)
VAP10
(0)
mA
(1)
VAP10
ω1
ω = 0

8
R. Sancibrián, Ing. Mecánica
15
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
Movimiento del plano 1 sobre el plano 0:Movimiento del plano 1 sobre el plano 0:Movimiento del plano 1 sobre el plano 0:Movimiento del plano 1 sobre el plano 0:
1. La condición de que un solo punto, el A, recorra la trayectoria m no condiciona completamente el movimiento del plano 1 sobre el cero, ya que pueden darse infinitos desplazamientos entre posiciones cumpliendo con esta condición.
2. Por tanto, la posición del polo P10 no está definida. Sin embargo, sí conocemos la dirección en la que se encuentra este polo, ya que debe estar situado en la normal a la trayectoria. La condición de que el punto A recorra la trayectoria define la dirección de la normal.
R. Sancibrián, Ing. Mecánica
16
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
Movimiento del plano 2 sobre el plano 0Movimiento del plano 2 sobre el plano 0Movimiento del plano 2 sobre el plano 0Movimiento del plano 2 sobre el plano 0
Condiciones:Condiciones:Condiciones:Condiciones:1. El punto de corte entre tangente y normal debe coincidir con el
movimiento del punto A.2. La recta t debe ser siempre tangente a la trayectoria y la recta
n debe ser normal a la misma.

9
R. Sancibrián, Ing. Mecánica
17
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
R. Sancibrián, Ing. Mecánica
18
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
mt
n
n
t
(2)

10
R. Sancibrián, Ing. Mecánica
19
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
R. Sancibrián, Ing. Mecánica
20
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)

11
R. Sancibrián, Ing. Mecánica
21
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
R. Sancibrián, Ing. Mecánica
22
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
nt
(2)

12
R. Sancibrián, Ing. Mecánica
23
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
Movimiento del plano 2 sobre el plano 0:Movimiento del plano 2 sobre el plano 0:Movimiento del plano 2 sobre el plano 0:Movimiento del plano 2 sobre el plano 0:• En este caso, la condición de normal y tangente a la trayectoria
restringe completamente el movimiento y, por tanto, la posición del plano 2 con respecto al plano 0 es conocida en cualquier instante.
• Al estar completamente restringido el movimiento la posición del polo P20 también lo está.
R. Sancibrián, Ing. Mecánica
24
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
t
n
n
t
(2)
t
n
n
t
(2)
P20 = cdc
ds

13
R. Sancibrián, Ing. Mecánica
25
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)t
n
n
t
(2)
t
n
n
t
(2)
t
n
n
t
(2)
t
n
n
t
(2)
t
n
nt
(2)
Evoluta de la trayectoria
R. Sancibrián, Ing. Mecánica
26
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
P201

14
R. Sancibrián, Ing. Mecánica
27
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
mt
n
n
t
(2)
P202
R. Sancibrián, Ing. Mecánica
28
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
P203

15
R. Sancibrián, Ing. Mecánica
29
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
P204
R. Sancibrián, Ing. Mecánica
30
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
P205

16
R. Sancibrián, Ing. Mecánica
31
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
nt
(2)
P206
Ruleta
Base
R. Sancibrián, Ing. Mecánica
32
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
Conclusiones sobre el movimiento del plano 2 sobre el Conclusiones sobre el movimiento del plano 2 sobre el Conclusiones sobre el movimiento del plano 2 sobre el Conclusiones sobre el movimiento del plano 2 sobre el plano 0:plano 0:plano 0:plano 0:
• El movimiento está perfectamente definido.• El polo P20 puede determinarse como intersección de dos
rectas normales separadas por un ds.• El polo P20 es a la vez el centro de curvatura de la trayectoria
para esa posición.• La base del movimiento del plano 2 sobre el plano 0 coincide
con la evoluta de la trayectoria.

17
R. Sancibrián, Ing. Mecánica
33
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
Movimiento de los tres planos.Movimiento de los tres planos.Movimiento de los tres planos.Movimiento de los tres planos.• Ahora hacemos coincidir el movimiento de los tres planos:
el plano fijo (1), el móvil (1) y el móvil (2). • Durante el movimiento se mantendrán las condiciones
anteriormente citadas y además el punto de corte de las rectas n y t coincidirá con el punto A.
La última de estas condiciones implica que el polo del movimiento del plano 1 con respecto al (2) coincide con el punto A, ya que tiene que tener las misma velocidad en el plano (1) y (2).
R. Sancibrián, Ing. Mecánica
34
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
A
(1)
P201
P101
P211

18
R. Sancibrián, Ing. Mecánica
35
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
mt
n
n
t
(2)
A
(1)
P202
P102
P212
R. Sancibrián, Ing. Mecánica
36
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
A
(1)
P203
P103
P213

19
R. Sancibrián, Ing. Mecánica
37
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
A
(1)
P204
P104
P214
R. Sancibrián, Ing. Mecánica
38
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
n
t
(2)
A
(1)
P205
P105
P215

20
R. Sancibrián, Ing. Mecánica
39
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
(0)
m
t
n
nt
(2)
A
(1)
P206
P216
P106
R. Sancibrián, Ing. Mecánica
40
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de Aspectos previos del teorema de HartmanHartmanHartmanHartman
Conclusiones generales:Conclusiones generales:Conclusiones generales:Conclusiones generales:• Como puede observarse, los tres polos: P10, P12 y P20 están
permanentemente alineados (lo que está de acuerdo con el teorema de Aronhold).
• Con los datos del problema, de los tres polos se conoce la posición exacta de dos de ellos (P21, P20) y la dirección en la que se encuentra el tercero (P10).
• Además, el centro de curvatura de la trayectoria que recorre un punto A es el polo del plano asociado a la normal y tangente a la trayectoria en la que se mueve dicho punto.
• La evoluta de la trayectoria es la base del movimiento del plano (2) con respecto al plano (0).

21
R. Sancibrián, Ing. Mecánica
41
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Teorema de Teorema de Teorema de Teorema de HartmanHartmanHartmanHartman
Enunciado del teorema de Enunciado del teorema de Enunciado del teorema de Enunciado del teorema de HartmanHartmanHartmanHartman::::El extremo del vector velocidad de un punto, el centro de curvatura de la trayectoria y la componente paralela a la velocidad del punto del vector velocidad de cambio de polo, están alineados.
Para demostrar este teorema veremos dos demostraciones: A y B. La primera de ellas, la A, es una demostración más intuitiva y la segunda, la B, más matemática.
A
cdc
Pu
R. Sancibrián, Ing. Mecánica
42
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Teorema de Teorema de Teorema de Teorema de HartmanHartmanHartmanHartman
Demostración A
P
A
B
C
VA VCVB

22
R. Sancibrián, Ing. Mecánica
43
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Teorema de Teorema de Teorema de Teorema de HartmanHartmanHartmanHartman
P
A
B
C
VCperp
VB VBrel
VBBarraVA
perp
R. Sancibrián, Ing. Mecánica
44
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Teorema de Teorema de Teorema de Teorema de HartmanHartmanHartmanHartman
A
cdc
Pu

23
R. Sancibrián, Ing. Mecánica
45
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Teorema de Teorema de Teorema de Teorema de HartmanHartmanHartmanHartman
A
C
P utp tp
np
np
Ψ
ω
O0
O1
VA
ρ
(0)
(1)Ap
R. Sancibrián, Ing. Mecánica
46
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Teorema de Teorema de Teorema de Teorema de HartmanHartmanHartmanHartman
A
C
P utp tp
np
np
Ψ
ω
r0
r1
O0
O1
VA
ρ
(0)
(1)Ap

24
R. Sancibrián, Ing. Mecánica
47
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Enunciado y demostración del Teorema de Teorema de Teorema de Teorema de HartmanHartmanHartmanHartman
A
C
P utp tp
np
np
Ψ
ω
r0
r1
O0
O1
VA
ρ
(0)
(1)
Ψ
Ap
A
P
VA
u’
C
R. Sancibrián, Ing. Mecánica
48
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2
2. Euler-Savary.1. Fórmula de Euler-Savary.2. Criterio de signos.

25
R. Sancibrián, Ing. Mecánica
49
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Fórmula de Fórmula de Fórmula de Fórmula de EulerEulerEulerEuler----SavarySavarySavarySavary (E(E(E(E----S)S)S)S)
P utp tp
np
np
ω
r0
r1
O0
O1
(0)
(1)
VO1
cteur
1
r
1
1o
==+ω
R. Sancibrián, Ing. Mecánica
50
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Fórmula de Fórmula de Fórmula de Fórmula de EulerEulerEulerEuler----SavarySavarySavarySavary (E(E(E(E----S)S)S)S)A
C
P utp tp
np
np
ω
r0
r1
O0
O1
VA
(0)
(1)
ϕu’
VO1
cteur
1
r
1sen
CP
1
PA
1
1o
==+=
+
ωφ

26
R. Sancibrián, Ing. Mecánica
51
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Criterio de signosCriterio de signosCriterio de signosCriterio de signos
1o r
1
r
1sen
CP
1
PA
1+=
+ φ
O0
O1r1
r0
tptp
np
np
P
A
C
ϕ
O0
O1r1
r0
tptp
np
np
P
AC
ϕ
1o r
1
r
1sen
CP
1
PA
1+=
+
−φ
R. Sancibrián, Ing. Mecánica
52
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Criterio de signosCriterio de signosCriterio de signosCriterio de signos
1o r
1
r
1sen
CP
1
PA
1+
−=
+ φ
O1r1
r0
tptp
np
np
P
A
C
ϕ
O0
O1r1
r0
tptp
np
np
P
A
C
ϕ
O0
1o r
1
r
1sen
CP
1
PA
1+
−=
+
−φ

27
R. Sancibrián, Ing. Mecánica
53
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Criterio de signosCriterio de signosCriterio de signosCriterio de signos
1o r
1
r
1sen
CP
1
PA
1
−+=
+ φ
O0
O1
r1
r0
tptp
np
np
P
A
C
ϕ
O0
O1
r1
r0
tptp
np
np
P
AC
ϕ
1o r
1
r
1sen
CP
1
PA
1
−+=
+
−φ
R. Sancibrián, Ing. Mecánica
54
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2
3. Circunferencia de inflexiones y circunferencia de Bresse. 1. Circunferencia de las inflexiones.2. Circunferencia de Bresse y polo de aceleraciones.

28
R. Sancibrián, Ing. Mecánica
55
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Circunferencia de las inflexiones Circunferencia de las inflexiones Circunferencia de las inflexiones Circunferencia de las inflexiones ((((circunfcircunfcircunfcircunf. de . de . de . de HireHireHireHire))))
P
ϕ
A
I
u
∞
ωr δ
P
ϕ
A
u
∞
ω
wδ
C
φδ senr =
CAWAPA2 ⋅=
Definición:Definición:Definición:Definición: los puntos del plano móvil (1) que no tienen aceleración normal por estar en un punto de inflexión de la trayectoria (curvatura ∞).
R. Sancibrián, Ing. Mecánica
56
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Circunferencia de Circunferencia de Circunferencia de Circunferencia de BresseBresseBresseBresse. Polo de . Polo de . Polo de . Polo de aceleracionesaceleracionesaceleracionesaceleraciones
P
Q
u
ψ
Ap
r
A
b
ψcosbr −=
Definición:Definición:Definición:Definición: Es el lugar geométrico de los puntos del plano móvil que tienen aceleración tangencial nula.

29
R. Sancibrián, Ing. Mecánica
57
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2
4. Construcciones gráficas.1. Construcción gráfica 1.2. Construcción gráfica 2.
R. Sancibrián, Ing. Mecánica
58
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1A
P
Enunciado:Enunciado:Enunciado:Enunciado:
Dada la circunferencia de las inflexiones y conocido el polo, calcular el cdc de la trayectoria del punto A:

30
R. Sancibrián, Ing. Mecánica
59
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1A
PB
Paso 1:Paso 1:Paso 1:Paso 1:
Se trazan por A y B dos rectas arbitrarias que se cortan en el punto B.
R. Sancibrián, Ing. Mecánica
60
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1A
P
W
B
Paso 2:Paso 2:Paso 2:Paso 2:
Se obtiene el punto W como intersección de la recta AP con la circunferencia de las inflexiones, y se une dicho punto con el punto B.

31
R. Sancibrián, Ing. Mecánica
61
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1A
P
W
B
D
Paso 3:Paso 3:Paso 3:Paso 3:
Se traza una recta paralela a WB por el punto P, obteniendo el punto D en el punto de corte con la recta AB.
R. Sancibrián, Ing. Mecánica
62
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1A
P
W
B
D
C
Paso 4:Paso 4:Paso 4:Paso 4:
Finalmente se traza por el punto D una recta paralela a la recta PB, y donde corta a la recta AP se obtiene el punto C, cdcde la trayectoria de A.

32
R. Sancibrián, Ing. Mecánica
63
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1Construcción gráfica 1A
P
W
B
D
C
BA
DA
WA
PA=
BA
DA
PA
CA=
PA
CA
WA
PA=
CAWAPA2 ⋅=
R. Sancibrián, Ing. Mecánica
64
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OA
OB
Enunciado:Enunciado:Enunciado:Enunciado:
Hallar tres puntos de la circunferencia de las inflexiones, conocidos dos puntos (A y B) y sus respectivos centros de curvaturas (OA y OB).

33
R. Sancibrián, Ing. Mecánica
65
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OAOB
P
Paso 1:Paso 1:Paso 1:Paso 1:
El polo P es el primer punto de la circunferencia de las inflexiones, ya que puede obtenerse directamente en la intersección de las dos rectas que unen los puntos con sus centros de curvatura.
R. Sancibrián, Ing. Mecánica
66
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OAOB
P
Q
Paso 2:Paso 2:Paso 2:Paso 2:
Se obtiene el punto Q como intersección de las rectas AB y OAOB.

34
R. Sancibrián, Ing. Mecánica
67
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OAOB
Q
P Eje de colineación (ECAB)
Paso 3:Paso 3:Paso 3:Paso 3:
Se obtiene el Eje de Colineación uniendo el punto Q con el polo P.
R. Sancibrián, Ing. Mecánica
68
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OAOB
Q
WAWB
P Eje de colineación (ECAB)
Paso 4:Paso 4:Paso 4:Paso 4:
Se traza por P una recta paralela a OAOB hasta que corte a la recta AB en el punto H. A continuación se traza otra recta por este punto paralela al eje de colineación. Los puntos de corte con AOA y BOB son puntos de la circunferencia de las inflexiones.
H

35
R. Sancibrián, Ing. Mecánica
69
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OAOB
Q
WAWB
P Eje de colineación (ECAB)
Conocidos tres puntos de la circunferencia de las inflexiones se puede obtener dicha circunferencia.
H
R. Sancibrián, Ing. Mecánica
70
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OAOB
WAWB
P
A
P
W

36
R. Sancibrián, Ing. Mecánica
71
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OAOB
WAWB
P
A
P
W
B H
R. Sancibrián, Ing. Mecánica
72
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2Construcción gráfica 2
A
B
OAOB
Q
WAWB
PEje de colineación (ECAB)
A
P
W
B
D
C
H

37
R. Sancibrián, Ing. Mecánica
73
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2
5. Teorema de Bobillier y construcción de Aronhold.1. Teorema de Bobillier.2. Teorema de Aronhold.
R. Sancibrián, Ing. Mecánica
74
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Teorema de Teorema de Teorema de Teorema de BobillierBobillierBobillierBobillier
“La bisectriz del ángulo que forman las normales a la trayectoria de dos puntos coincide con la bisectriz del ángulo que forman la dirección de la velocidad de cambio de polo (o tangente polar) y el eje de colineación”.

38
R. Sancibrián, Ing. Mecánica
75
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Teorema de Teorema de Teorema de Teorema de BobillierBobillierBobillierBobillier
B
OBOA
A
R. Sancibrián, Ing. Mecánica
76
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Teorema de Teorema de Teorema de Teorema de BobillierBobillierBobillierBobillier
B
OBOA
A
P
Q
EC AB

39
R. Sancibrián, Ing. Mecánica
77
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Teorema de Teorema de Teorema de Teorema de BobillierBobillierBobillierBobillier
B
WA
WB
OBOA
A
P
Q
EC AB
R. Sancibrián, Ing. Mecánica
78
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Teorema de Teorema de Teorema de Teorema de BobillierBobillierBobillierBobillier
B
WA
WB
OBOA
A
P
Q
tp
EC AB

40
R. Sancibrián, Ing. Mecánica
79
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Teorema de Teorema de Teorema de Teorema de BobillierBobillierBobillierBobillier
B
WA
WB
OBOA
A
P
Q
tp
β
β
β
EC AB
R. Sancibrián, Ing. Mecánica
80
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Teorema de Teorema de Teorema de Teorema de BobillierBobillierBobillierBobillier
==
=
=

41
R. Sancibrián, Ing. Mecánica
81
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Teorema de Teorema de Teorema de Teorema de BobillierBobillierBobillierBobillier
B
WA
WB
OBOA
A
P
Q
Bise
ctriz
tp
β
β
β
EC AB
R. Sancibrián, Ing. Mecánica
82
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción de Construcción de Construcción de Construcción de AronholdAronholdAronholdAronhold
B
OB
OA
A
P
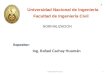
CEnunciado:Enunciado:Enunciado:Enunciado: Dados dos puntos, A y B, y sus respectivos centros de curvatura, OA y OB, se desea hallar el centro de curvatura de un tercer punto C del mismo plano móvil.
Paso 1:Paso 1:Paso 1:Paso 1: determinamos el polo P.

42
R. Sancibrián, Ing. Mecánica
83
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción de Construcción de Construcción de Construcción de AronholdAronholdAronholdAronhold
B
OB
OA
A tp
P
C
QAB
ββ
ECAB
Paso 2:Paso 2:Paso 2:Paso 2: determinamos el eje de colineación con los puntos A y B, y a continuación obtenemos la tangente polar empleando el teorema de Bobillier.
R. Sancibrián, Ing. Mecánica
84
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción de Construcción de Construcción de Construcción de AronholdAronholdAronholdAronhold
B
OB
OA
A tp
P
C
QAB
ββ
α α
ECAB
ECAC
Paso 3:Paso 3:Paso 3:Paso 3: Aplicando de nuevo el teorema de Bobillier se determina el eje de colineación AC.

43
R. Sancibrián, Ing. Mecánica
85
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Construcción de Construcción de Construcción de Construcción de AronholdAronholdAronholdAronhold
B
OB
OA
A tp
P
C
QAB
ββ
α α
QAC
ECAB
ECAC
OC
Paso 4:Paso 4:Paso 4:Paso 4: Uniendo el punto QAC con el centro de curvatura de la trayectoria de A de obtiene el centro de curvatura de la trayectoria de C como punto de corte de esta recta con la recta PC.
R. Sancibrián, Ing. Mecánica
86
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2Capítulo II: Tema 2
6. Generalización de la fórmula de Euler-Savary.1. Introducción. Perfiles conjugados.2. Euler-Savary generalizado.3. Fórmula de E-S generalizado.

44
R. Sancibrián, Ing. Mecánica
87
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Introducción. Perfiles conjugadosIntroducción. Perfiles conjugadosIntroducción. Perfiles conjugadosIntroducción. Perfiles conjugados
A
C
u
Base (0) = Fija
Ruleta (1)
ω
tptp
P0
PPP1
Hasta ahora hemos considerado que la base es una curva fija (nuestro sistema de referencia). Esto implica que en el polo P existan 3 puntos:
• P0: punto del plano fijo (Base) y por tanto de velocidad nula.
• P1: punto del plano móvil (ruleta) y velocidad nula por condición de polo.
• P: punto matemático que representa las sucesivas posiciones del polo sobre el plano fijo. Sus velocidad u, se denomina velocidad de cambio de polo.
R. Sancibrián, Ing. Mecánica
88
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Introducción. Perfiles conjugadosIntroducción. Perfiles conjugadosIntroducción. Perfiles conjugadosIntroducción. Perfiles conjugadosAhora consideramos un plano fijo (0) y otro móvil (1) en el que tenemos en todo instante una tangente en común t. Pero a diferencia del caso anterior en el contacto existe rodadura y deslizamiento.
Envolvente:Envolvente:Envolvente:Envolvente: se dice que una curva en un plano fijo es la envolvente de otra curva en el plano móvil (denominada perfilperfilperfilperfil) si en todo instante tienen una tangente en común.
A ambas curvas (perfil y envolvente) se las denomina perfiles conjugadosperfiles conjugadosperfiles conjugadosperfiles conjugados.
tt
tt
n
n
n
n
Envolvente (0)
Perfil (0)Perfil (0)
Posición 1 Posición 2

45
R. Sancibrián, Ing. Mecánica
89
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Introducción. Perfiles conjugadosIntroducción. Perfiles conjugadosIntroducción. Perfiles conjugadosIntroducción. Perfiles conjugados
En el punto H de nuevo existen tres puntos:
• H0: Perteneciente a la envolvente (plano fijo) y de velocidad nula.
• H1: Perteneciente al perfil (1) y de velocidad la velocidad de deslizamiento del perfil sobre la envolvente (VHdes).
• H: Punto matemático de contacto. Su velocidad es distinta de cero.
El polo del movimiento relativo de una curva y su envolvente está situado sobre la normal a la tangente en el punto de contacto (H), ya que la velocidad de H1 debe estar en la dirección de la tangente (de lo contrario el perfil penetra o se aleja de la envolvente).
t
t
n
n
Envolvente (0)
Perfil (0)
Posición 1
P10
H VHdes
R. Sancibrián, Ing. Mecánica
90
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
EulerEulerEulerEuler----SavarySavarySavarySavary GeneralizadoGeneralizadoGeneralizadoGeneralizado
De forma similar a como se realizó en el teorema de Hartman vamos a considerar 3 planos en el movimiento:
• El plano (0): es el plano fijo y en el se encuentran situados tanto la envolvente como la base.
• El plano (1): es el plano móvil al que pertenecen la ruleta, el perfil y el punto A.• El plano (2): que es el segundo plano móvil compuesto por la normal (n) y la
tangente (t) al perfil y la envolvente en el punto de contacto entre ambas curvas.
A continuación se seguirán los pasos siguientes:• Localización de los 3 polos del movimiento relativo.• Velocidades de cambio de polo en los tres casos.• Bases y ruletas en los movimientos relativos.

46
R. Sancibrián, Ing. Mecánica
91
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
A
u10
Base (0) = Fija
Ruleta (1)ω
tptp
t (2)
t (2)
VA
Envolvente (0)
Perfil (1)
n (2)
n (2)
P10
ϕP10: como se ha explicado anteriormente este polo debe estar situado sobre la recta normal en el punto de contacto entre perfil y evolvente. Suponemos su localización así como las curvas Base y Ruleta.
La velocidad de cambio de polo u10debe estar sobre la tangente polar.
R. Sancibrián, Ing. Mecánica
92
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
P20: Como se ha demostrado (teorema de Hartman) un plano móvil formado por tangente y normal a una trayectoria tiene su polo en el centro de curvatura de la trayectoria. En este caso la trayectoria es la superficie de la curva evolvente.
Además, la base del movimiento 20 será la evoluta de la envolvente y por tanto la velocidad de cambio de polo u20 tendrá la dirección de la recta normal.
A
Base (0) = Fija
Ruleta (1)ω
tptp
t (2)
t (2)
VA
Envolvente (0)
Perfil (1)
n (2)
n (2)
P20
P10
Evoluta de la envolvente (2)
ϕ
u20
u10

47
R. Sancibrián, Ing. Mecánica
93
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
P21: Si invertimos el movimiento y la curva fija es el perfil y la móvil la envolvente, siendo el perfil la trayectoria descrita por el punto de corte entre normal y tangente. Por la misma razón que en el caso anterior el polo P21 debe estar situado en el cdc del perfil.
Además, igual que antes, la base del movimiento relativo 21 será la evoluta del perfil y la velocidad de cambio de polo u21será tangente a esta curva.
Sin embargo, esta velocidad será relativa, es decir u21
rel, ya que es la velocidad que observa el observador situado sobre el perfil.
Para obtener la velocidad de cambio de polo total es necesario componerla con la velocidad del punto VA.
A = P21
Base (0) = Fija
Ruleta (1)ω
tptp
t (2)
t (2)
VA
Envolvente (0)
Perfil (1)
n (2)
n (2)
P20
P10
Evoluta del perfil (1)
Evoluta de la envolvente (2)
ϕ
u10
u21rel
u21
R. Sancibrián, Ing. Mecánica
94
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
A = P21
u
Base (0) = Fija
Ruleta (1)ω
tptp
t (2)
t (2)
VA
Envolvente (0)
Perfil (1)
n (2)
n (2)
P20
P10
Evoluta del perfil (1)
Evoluta de la envolvente (2)
ϕ
u21
u21rel
Como puede observarse, P20, P21 y P10son tres puntos que se mueven permanentemente alineados.
Por tanto, como se demostró anteriormente, se debe cumplir que los extremos de la componentes de la velocidad perpendiculares a la recta que une los tres puntos deben estar alineadas.
Conclusión:Conclusión:Conclusión:Conclusión:
Si los tres puntos están permanentemente alineados se puede aplicar el teorema de Hartman y la fórmula de Euler-Savary. En este caso se denomina a la fórmula: Euler-Savary generalizado:
ctesenAP
1
PP
1
101020
=
+ φ

48
R. Sancibrián, Ing. Mecánica
95
Cinemática y Dinámica de Máquinas. II.2 Teoría de la curvatura
Fórmula de EFórmula de EFórmula de EFórmula de E----S GeneralizadoS GeneralizadoS GeneralizadoS GeneralizadoE-S Estándar
A
C
P u
ctesenCP
1
PA
1=
+ φ
E-S Generalizado
A1
Base
Ruleta
tptp
t
t
Envolvente
Perfil
n
n
A0
P
ϕ
ctesenPA
1
PA
1
10
=
+ φ
A0: cdc de la envolvente.
A1: cdc del perfil.
P: Polo entre el plano del perfil y la envolvente.