Embed Size (px)
Citation preview
第三章第三章第三章第三章 时域分析法时域分析法时域分析法时域分析法
� 3.1 型输入信号和时域性能指标型输入信号和时域性能指标型输入信号和时域性能指标型输入信号和时域性能指标
� 3.2 一阶系统的时域分析一阶系统的时域分析一阶系统的时域分析一阶系统的时域分析
� 3.3 二阶系统的时域分析二阶系统的时域分析二阶系统的时域分析二阶系统的时域分析
� 3.4 高阶系统的时域分析高阶系统的时域分析高阶系统的时域分析高阶系统的时域分析
� 3.5 系统的稳定性分析系统的稳定性分析系统的稳定性分析系统的稳定性分析
� 3.6 系统的稳态特性分析系统的稳态特性分析系统的稳态特性分析系统的稳态特性分析
概述概述概述概述概述概述概述概述
�� 时域分析时域分析时域分析时域分析时域分析时域分析时域分析时域分析::根据控制系统的时间响应来分析系根据控制系统的时间响应来分析系根据控制系统的时间响应来分析系根据控制系统的时间响应来分析系根据控制系统的时间响应来分析系根据控制系统的时间响应来分析系根据控制系统的时间响应来分析系根据控制系统的时间响应来分析系
统的稳定性统的稳定性统的稳定性统的稳定性,,,,暂态性能和稳态精度暂态性能和稳态精度暂态性能和稳态精度暂态性能和稳态精度统的稳定性统的稳定性统的稳定性统的稳定性,,,,暂态性能和稳态精度暂态性能和稳态精度暂态性能和稳态精度暂态性能和稳态精度
�� 是通过传递函数是通过传递函数是通过传递函数是通过传递函数、、、、拉氏变换及反变换求出系统拉氏变换及反变换求出系统拉氏变换及反变换求出系统拉氏变换及反变换求出系统是通过传递函数是通过传递函数是通过传递函数是通过传递函数、、、、拉氏变换及反变换求出系统拉氏变换及反变换求出系统拉氏变换及反变换求出系统拉氏变换及反变换求出系统
在典型输入下的输出表达式在典型输入下的输出表达式在典型输入下的输出表达式在典型输入下的输出表达式 从而分析系统时从而分析系统时从而分析系统时从而分析系统时在典型输入下的输出表达式在典型输入下的输出表达式在典型输入下的输出表达式在典型输入下的输出表达式 从而分析系统时从而分析系统时从而分析系统时从而分析系统时
间响应的全部信息间响应的全部信息间响应的全部信息间响应的全部信息。。。。间响应的全部信息间响应的全部信息间响应的全部信息间响应的全部信息。。。。
�� 具有直观和准确的优点具有直观和准确的优点具有直观和准确的优点具有直观和准确的优点具有直观和准确的优点具有直观和准确的优点具有直观和准确的优点具有直观和准确的优点
�� 适用于低阶系统适用于低阶系统适用于低阶系统适用于低阶系统。。。。适用于低阶系统适用于低阶系统适用于低阶系统适用于低阶系统。。。。
�� 对控制系统的总要求是稳对控制系统的总要求是稳对控制系统的总要求是稳对控制系统的总要求是稳、、、、准准准准、、、、快快快快对控制系统的总要求是稳对控制系统的总要求是稳对控制系统的总要求是稳对控制系统的总要求是稳、、、、准准准准、、、、快快快快........
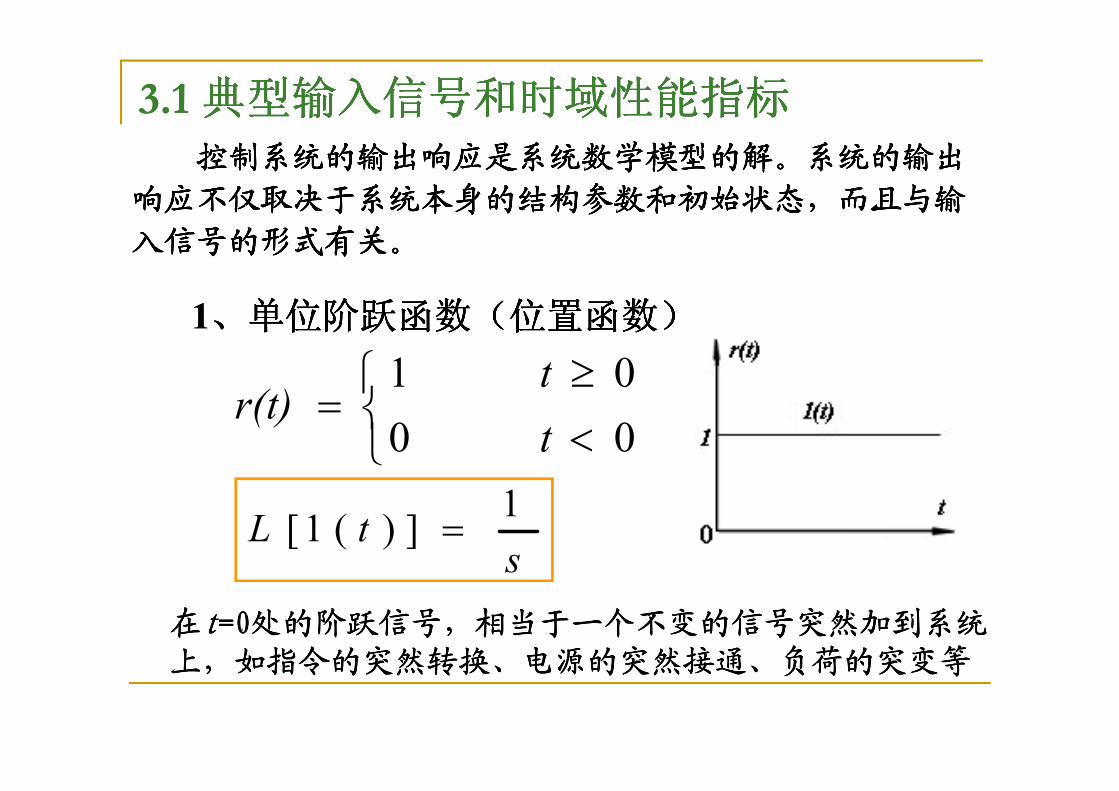
11 单位阶跃函数单位阶跃函数单位阶跃函数单位阶跃函数单位阶跃函数单位阶跃函数单位阶跃函数单位阶跃函数 位置函数位置函数位置函数位置函数位置函数位置函数位置函数位置函数
控制系统的输出响应是系统数学模型的解控制系统的输出响应是系统数学模型的解控制系统的输出响应是系统数学模型的解控制系统的输出响应是系统数学模型的解。。。。系统的输出系统的输出系统的输出系统的输出控制系统的输出响应是系统数学模型的解控制系统的输出响应是系统数学模型的解控制系统的输出响应是系统数学模型的解控制系统的输出响应是系统数学模型的解。。。。系统的输出系统的输出系统的输出系统的输出
响应不仅取决于系统本身的结构参数和初始状态响应不仅取决于系统本身的结构参数和初始状态响应不仅取决于系统本身的结构参数和初始状态响应不仅取决于系统本身的结构参数和初始状态 而且与输而且与输而且与输而且与输响应不仅取决于系统本身的结构参数和初始状态响应不仅取决于系统本身的结构参数和初始状态响应不仅取决于系统本身的结构参数和初始状态响应不仅取决于系统本身的结构参数和初始状态 而且与输而且与输而且与输而且与输
入信号的形式有关入信号的形式有关入信号的形式有关入信号的形式有关。。。。入信号的形式有关入信号的形式有关入信号的形式有关入信号的形式有关。。。。
3.1 3.1 型输入信号和时域性能指标型输入信号和时域性能指标型输入信号和时域性能指标型输入信号和时域性能指标型输入信号和时域性能指标型输入信号和时域性能指标型输入信号和时域性能指标型输入信号和时域性能指标
≥
=01 t
r(t)
1[1 ( ) ]L t
s=
在在在在tttt=,=,=,=,处的阶跃信号处的阶跃信号处的阶跃信号处的阶跃信号 相当于一个不变的信号突然加到系统相当于一个不变的信号突然加到系统相当于一个不变的信号突然加到系统相当于一个不变的信号突然加到系统
上上上上 如指令的突然转换如指令的突然转换如指令的突然转换如指令的突然转换、、、、电源的突然接通电源的突然接通电源的突然接通电源的突然接通、、、、负荷的突变等负荷的突变等负荷的突变等负荷的突变等
<
≥=
00
01
t
tr(t)
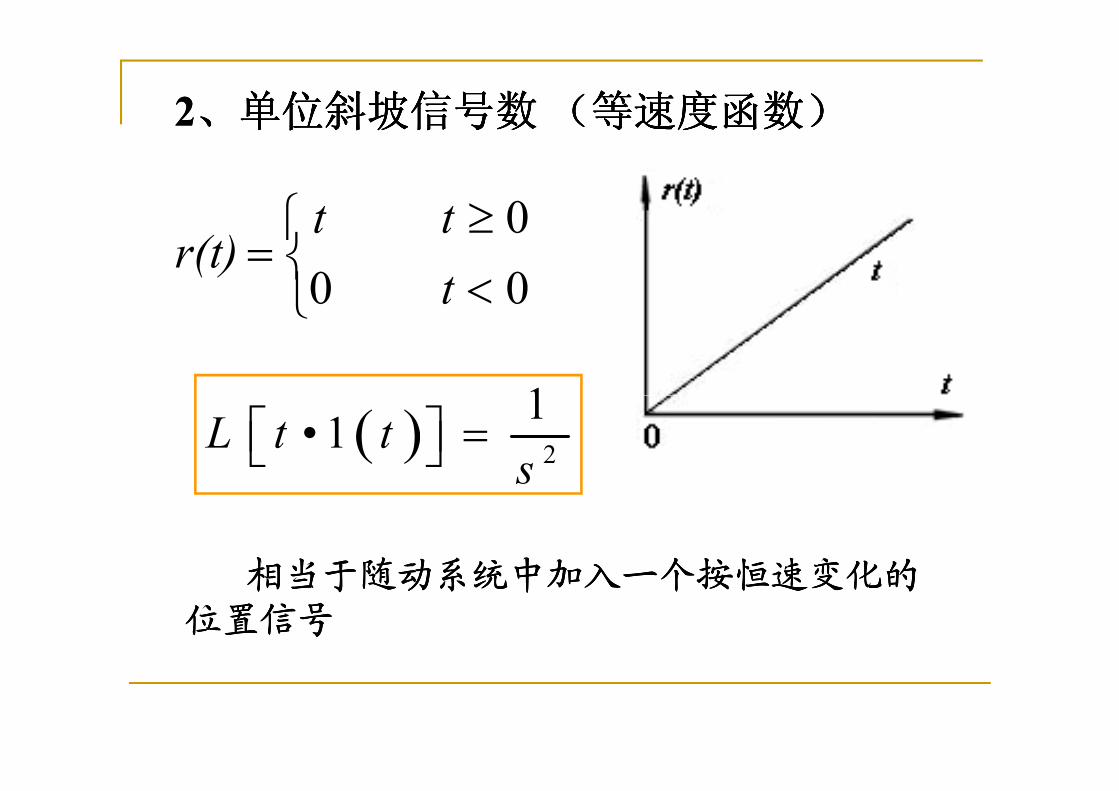
22 单位斜坡信号数单位斜坡信号数单位斜坡信号数单位斜坡信号数单位斜坡信号数单位斜坡信号数单位斜坡信号数单位斜坡信号数 等速度函数等速度函数等速度函数等速度函数等速度函数等速度函数等速度函数等速度函数
( ) 1
<
≥=
00
0
t
ttr(t)
( ) 2
1• 1L t t
s=
相当于随动系统中加入一个按恒速变化的相当于随动系统中加入一个按恒速变化的相当于随动系统中加入一个按恒速变化的相当于随动系统中加入一个按恒速变化的
位置信号位置信号位置信号位置信号
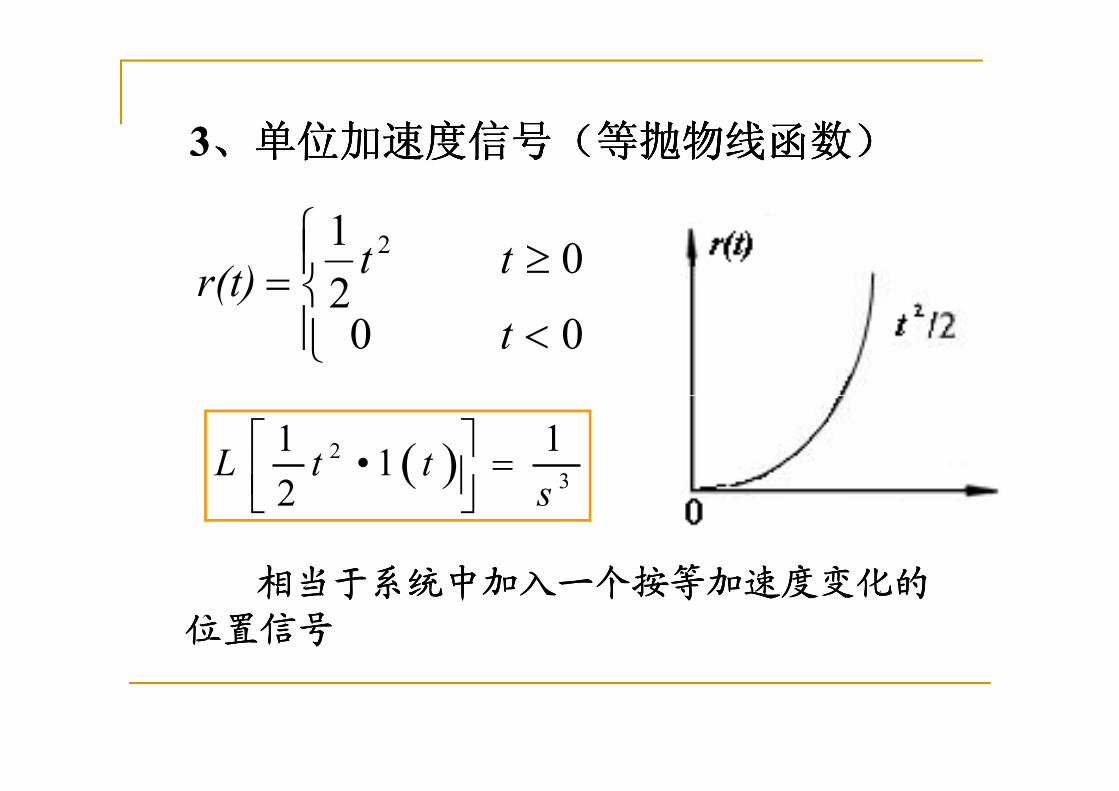
33 单位加速度信号单位加速度信号单位加速度信号单位加速度信号单位加速度信号单位加速度信号单位加速度信号单位加速度信号 等抛物线函数等抛物线函数等抛物线函数等抛物线函数等抛物线函数等抛物线函数等抛物线函数等抛物线函数
<
≥=00
02
1 2
t
ttr(t)
211( )
2t t�( )2
3
1 1• 1
2L t t
s
=
相当于系统中加入一个按等加速度变化的相当于系统中加入一个按等加速度变化的相当于系统中加入一个按等加速度变化的相当于系统中加入一个按等加速度变化的
位置信号位置信号位置信号位置信号
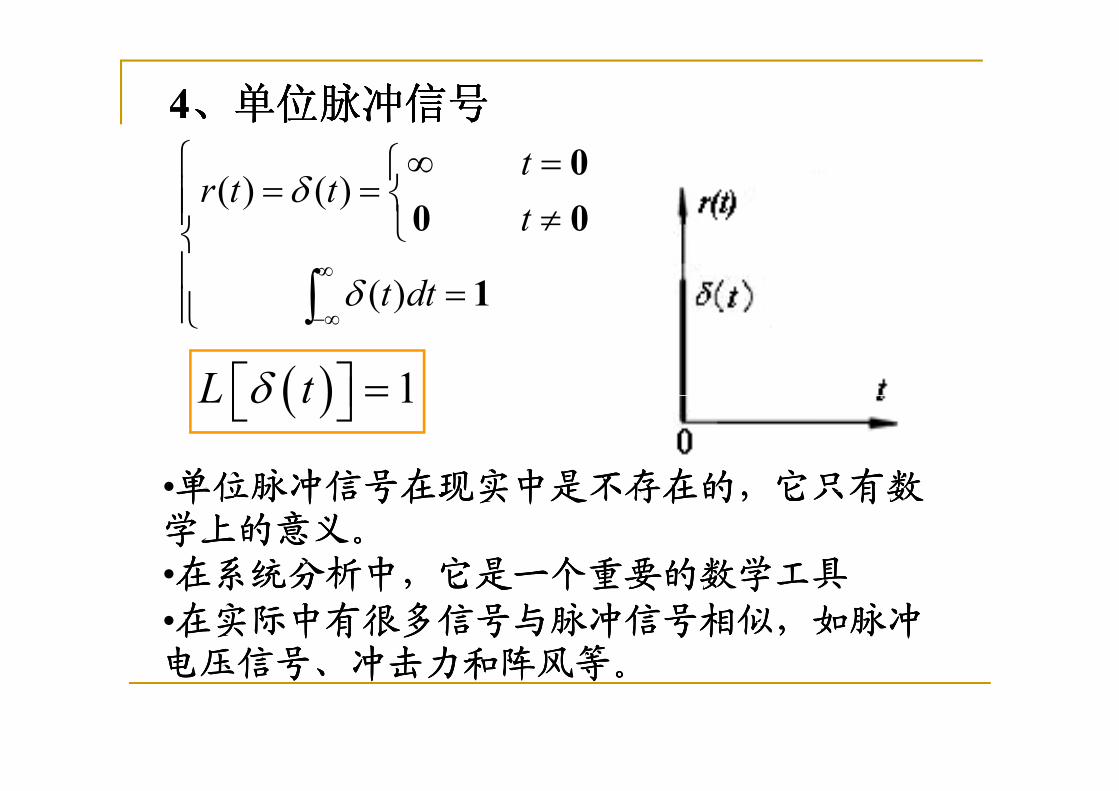
44 单位脉 信号单位脉 信号单位脉 信号单位脉 信号单位脉 信号单位脉 信号单位脉 信号单位脉 信号
( ) 1tδ∞
=∫ ( ) 1L tδ =
( ) ( )
( )
tr t t
t
t dt
δ
δ∞
−∞
∞ == = ≠
= ∫
0
0 0
1
( ) 1tδ−∞
=∫ ( ) 1L tδ =
•单位脉冲信号在现实中是不存在的单位脉冲信号在现实中是不存在的单位脉冲信号在现实中是不存在的单位脉冲信号在现实中是不存在的 它只有数它只有数它只有数它只有数
学上的意义学上的意义学上的意义学上的意义。。。。
•在系统分析中在系统分析中在系统分析中在系统分析中 它是一个重要的数学工具它是一个重要的数学工具它是一个重要的数学工具它是一个重要的数学工具
•在实际中有很多信号与脉冲信号相似在实际中有很多信号与脉冲信号相似在实际中有很多信号与脉冲信号相似在实际中有很多信号与脉冲信号相似 如脉冲如脉冲如脉冲如脉冲
电压信号电压信号电压信号电压信号、、、、冲击力和阵风等冲击力和阵风等冲击力和阵风等冲击力和阵风等。。。。
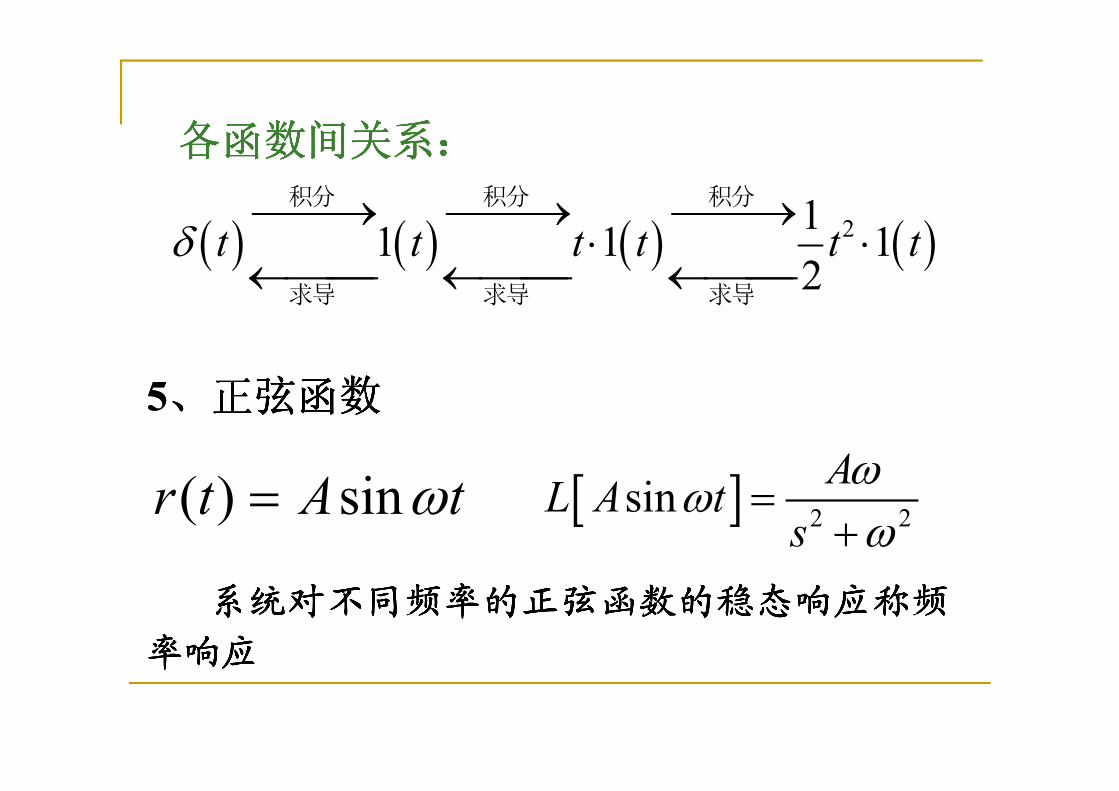
各函数间关系各函数间关系各函数间关系各函数间关系各函数间关系各函数间关系各函数间关系各函数间关系
55 弦函数弦函数弦函数弦函数弦函数弦函数弦函数弦函数
( ) ( ) ( ) ( )211 1 1
2t t t t t tδ→ → →
⋅ ⋅← ← ←
分 分 分
求导 求导 求导
55 弦函数弦函数弦函数弦函数弦函数弦函数弦函数弦函数
系统对不同频率的正弦函数的稳态响应称频系统对不同频率的正弦函数的稳态响应称频系统对不同频率的正弦函数的稳态响应称频系统对不同频率的正弦函数的稳态响应称频系统对不同频率的正弦函数的稳态响应称频系统对不同频率的正弦函数的稳态响应称频系统对不同频率的正弦函数的稳态响应称频系统对不同频率的正弦函数的稳态响应称频
率响应率响应率响应率响应率响应率响应率响应率响应
[ ] 2 2sin
AL A t
s
ωω
ω=
+tAtr ωsin)( =
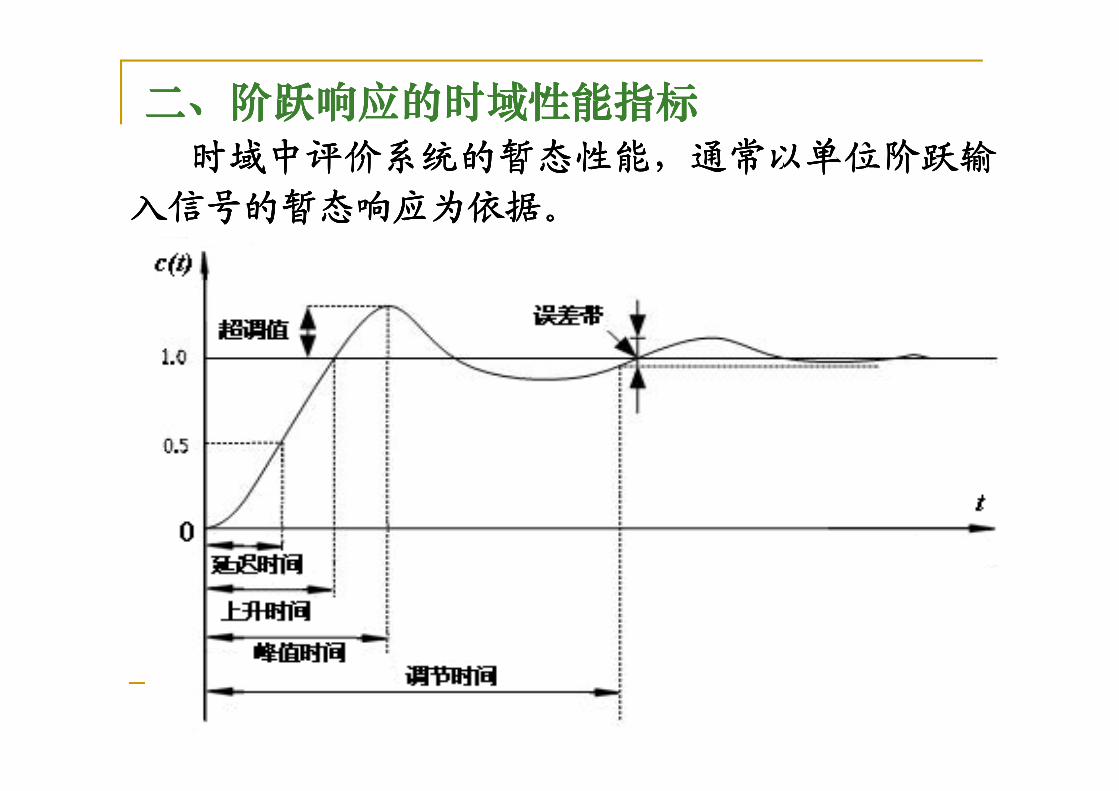
二二二二二二二二、、、、、、、、阶跃响应的时域性能指标阶跃响应的时域性能指标阶跃响应的时域性能指标阶跃响应的时域性能指标阶跃响应的时域性能指标阶跃响应的时域性能指标阶跃响应的时域性能指标阶跃响应的时域性能指标时域中评价系统的暂态 能时域中评价系统的暂态 能时域中评价系统的暂态 能时域中评价系统的暂态 能时域中评价系统的暂态 能时域中评价系统的暂态 能时域中评价系统的暂态 能时域中评价系统的暂态 能 通常以单位阶跃输通常以单位阶跃输通常以单位阶跃输通常以单位阶跃输通常以单位阶跃输通常以单位阶跃输通常以单位阶跃输通常以单位阶跃输
入信号的暂态响应为依据入信号的暂态响应为依据入信号的暂态响应为依据入信号的暂态响应为依据入信号的暂态响应为依据入信号的暂态响应为依据入信号的暂态响应为依据入信号的暂态响应为依据。。。。。。。。
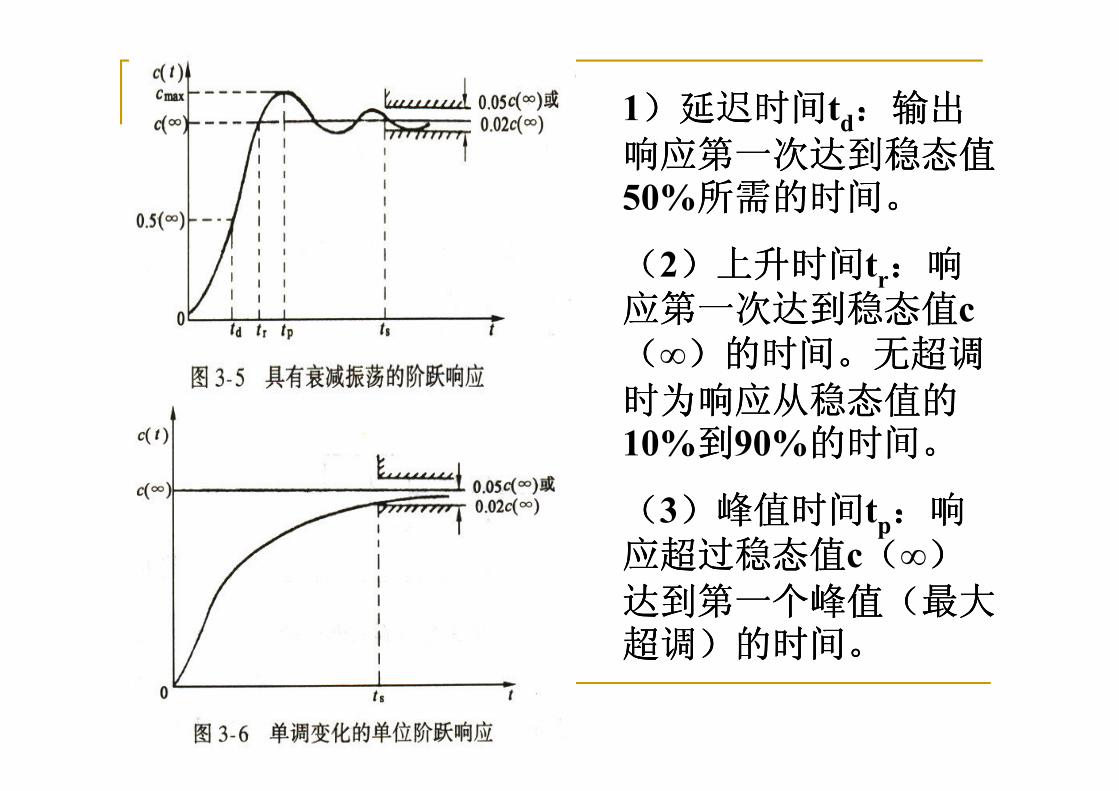
1 延迟时间延迟时间延迟时间延迟时间td 输出输出输出输出
响应第一 达到稳态值响应第一 达到稳态值响应第一 达到稳态值响应第一 达到稳态值
50%所需的时间所需的时间所需的时间所需的时间
2 升时间升时间升时间升时间tr 响响响响
应第一 达到稳态值应第一 达到稳态值应第一 达到稳态值应第一 达到稳态值c
∞ 的时间的时间的时间的时间 无超调无超调无超调无超调
时为响应从稳态值的时为响应从稳态值的时为响应从稳态值的时为响应从稳态值的时为响应从稳态值的时为响应从稳态值的时为响应从稳态值的时为响应从稳态值的
10%到到到到90%的时间的时间的时间的时间
3 峰值时间峰值时间峰值时间峰值时间tp 响响响响
应超过稳态值应超过稳态值应超过稳态值应超过稳态值c ∞
达到第一个峰值达到第一个峰值达到第一个峰值达到第一个峰值 最大最大最大最大
超调超调超调超调 的时间的时间的时间的时间
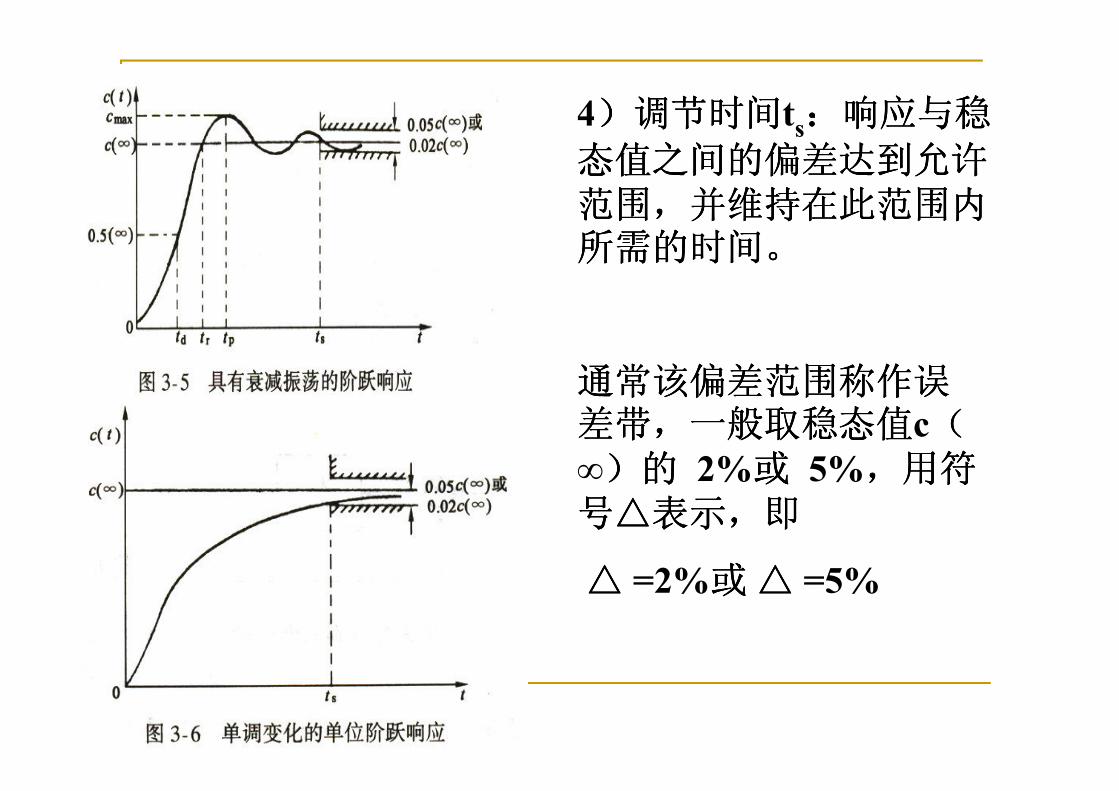
4 调节时间调节时间调节时间调节时间ts 响应 稳响应 稳响应 稳响应 稳
态值之间的偏差达到允许态值之间的偏差达到允许态值之间的偏差达到允许态值之间的偏差达到允许
范围范围范围范围,,,,并维持在 范围内并维持在 范围内并维持在 范围内并维持在 范围内
所需的时间所需的时间所需的时间所需的时间
通常该偏差范围 作误通常该偏差范围 作误通常该偏差范围 作误通常该偏差范围 作误通常该偏差范围 作误通常该偏差范围 作误通常该偏差范围 作误通常该偏差范围 作误
差带差带差带差带,,,,一般取稳态值一般取稳态值一般取稳态值一般取稳态值c
∞ 的的的的 2%或或或或 5%,,,,用符用符用符用符
号号号号△△△△表示表示表示表示,,,,即即即即
△△△△ =2%或或或或 △△△△ =5%
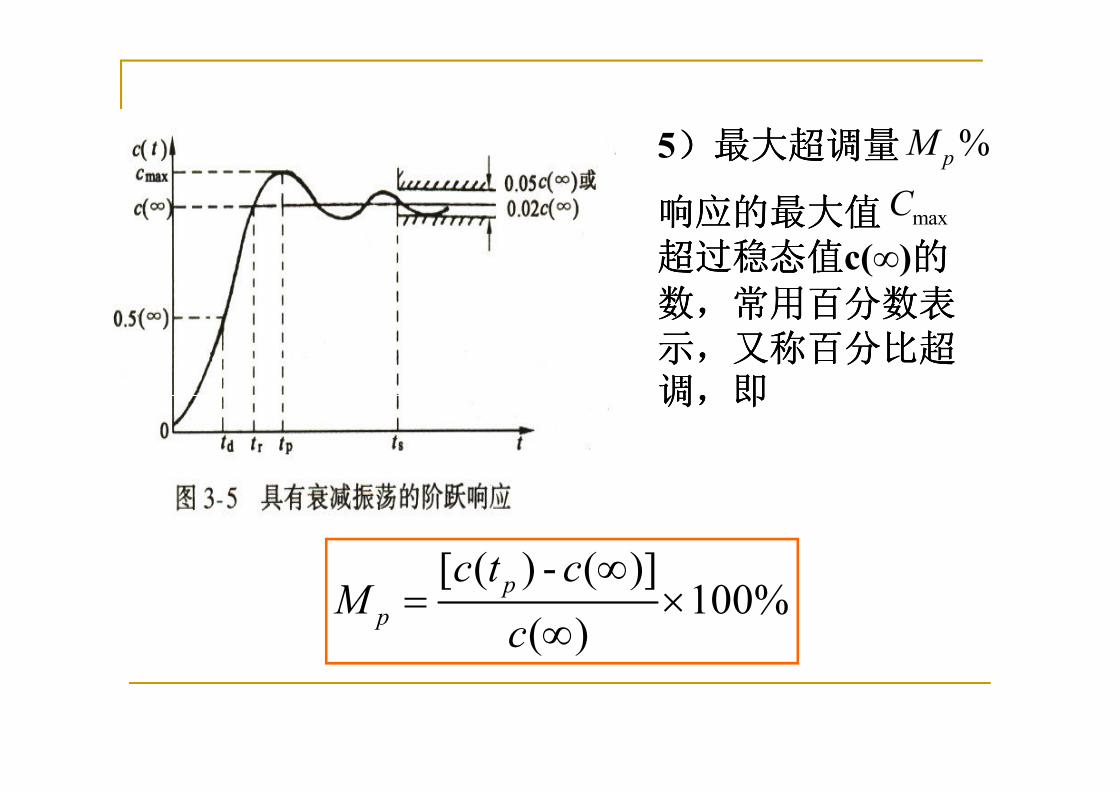
5 最大超调量最大超调量最大超调量最大超调量
响应的最大值响应的最大值响应的最大值响应的最大值
超过稳态值超过稳态值超过稳态值超过稳态值c(∞)的的的的
数数数数,,,,常用百分数表常用百分数表常用百分数表常用百分数表
示示示示,,,,又 百分比超又 百分比超又 百分比超又 百分比超
调调调调,,,,即即即即
maxC
%pM
[ ( ) - ( )]100%
( )
p
p
c t cM
c
∞= ×
∞
调调调调,,,,即即即即
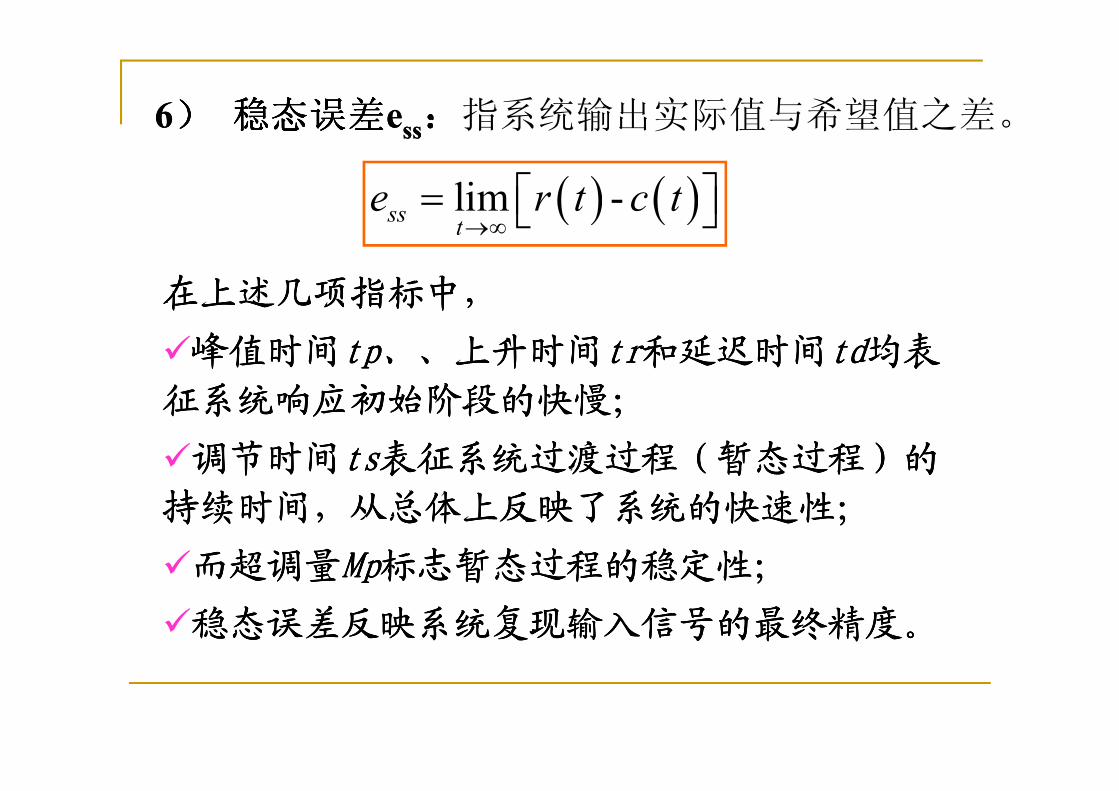
66 稳态误差稳态误差稳态误差稳态误差稳态误差稳态误差稳态误差稳态误差eessss 指系统输出实际值 希望值之差
( ) ( )lim -sst
e r t c t→∞
=
在上述几项指标中在上述几项指标中在上述几项指标中在上述几项指标中
�峰值时间峰值时间峰值时间峰值时间tptptptp、、、、、、、、上升时间上升时间上升时间上升时间trtrtrtr和延迟时间和延迟时间和延迟时间和延迟时间tdtdtdtd均表均表均表均表
征系统响应初始阶段的快慢征系统响应初始阶段的快慢征系统响应初始阶段的快慢征系统响应初始阶段的快慢征系统响应初始阶段的快慢征系统响应初始阶段的快慢征系统响应初始阶段的快慢征系统响应初始阶段的快慢
�调节时间调节时间调节时间调节时间tstststs表征系统过渡过程表征系统过渡过程表征系统过渡过程表征系统过渡过程 暂态过程暂态过程暂态过程暂态过程 的的的的
持续时间持续时间持续时间持续时间 从总体上反映了系统的快速从总体上反映了系统的快速从总体上反映了系统的快速从总体上反映了系统的快速
�而超调量而超调量而超调量而超调量MpMpMpMp标志暂态过程的稳定标志暂态过程的稳定标志暂态过程的稳定标志暂态过程的稳定
�稳态误差反映系统复现输入信号的最终精度稳态误差反映系统复现输入信号的最终精度稳态误差反映系统复现输入信号的最终精度稳态误差反映系统复现输入信号的最终精度。。。。
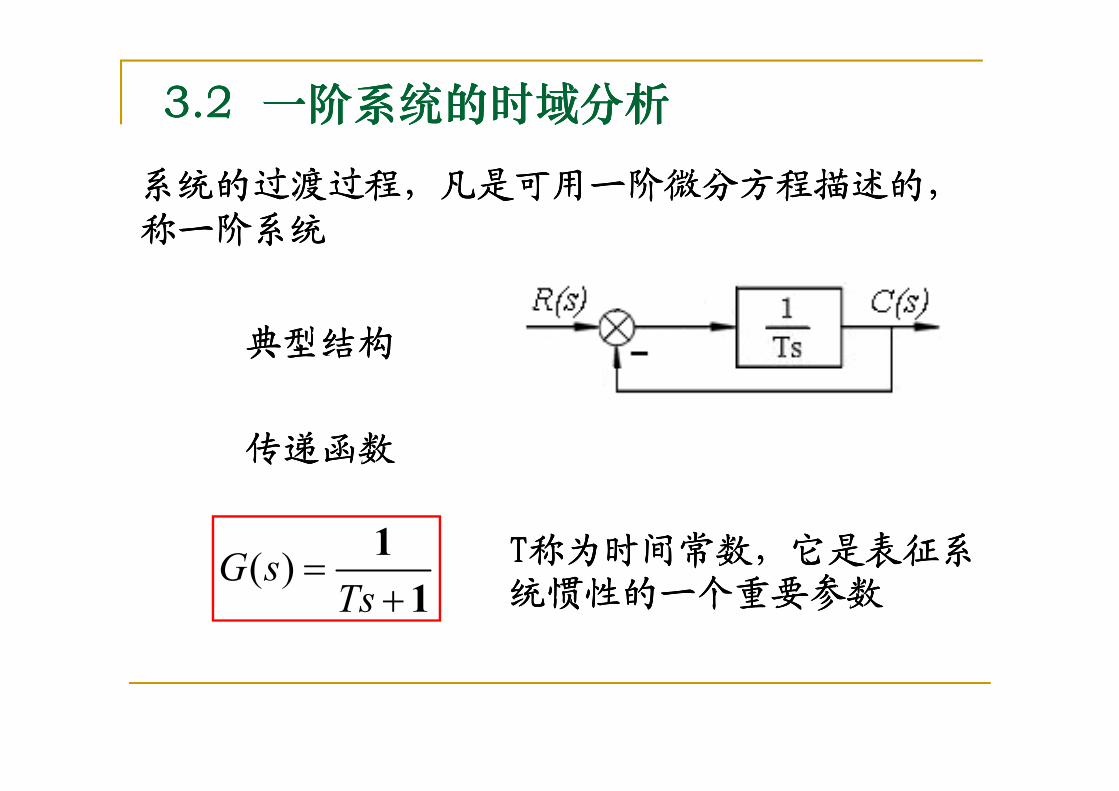
3.2 3.2 3.2 3.2 一阶系统的时域分析一阶系统的时域分析一阶系统的时域分析一阶系统的时域分析
系统的过渡过程系统的过渡过程系统的过渡过程系统的过渡过程 凡是可用一阶微分方程描述的凡是可用一阶微分方程描述的凡是可用一阶微分方程描述的凡是可用一阶微分方程描述的
称一阶系统称一阶系统称一阶系统称一阶系统
典型结构典型结构典型结构典型结构
( )G sTs
=+1
1
TTTT称为时间常数称为时间常数称为时间常数称为时间常数 它是表征系它是表征系它是表征系它是表征系
统惯 的一个重要参数统惯 的一个重要参数统惯 的一个重要参数统惯 的一个重要参数
传递函数传递函数传递函数传递函数
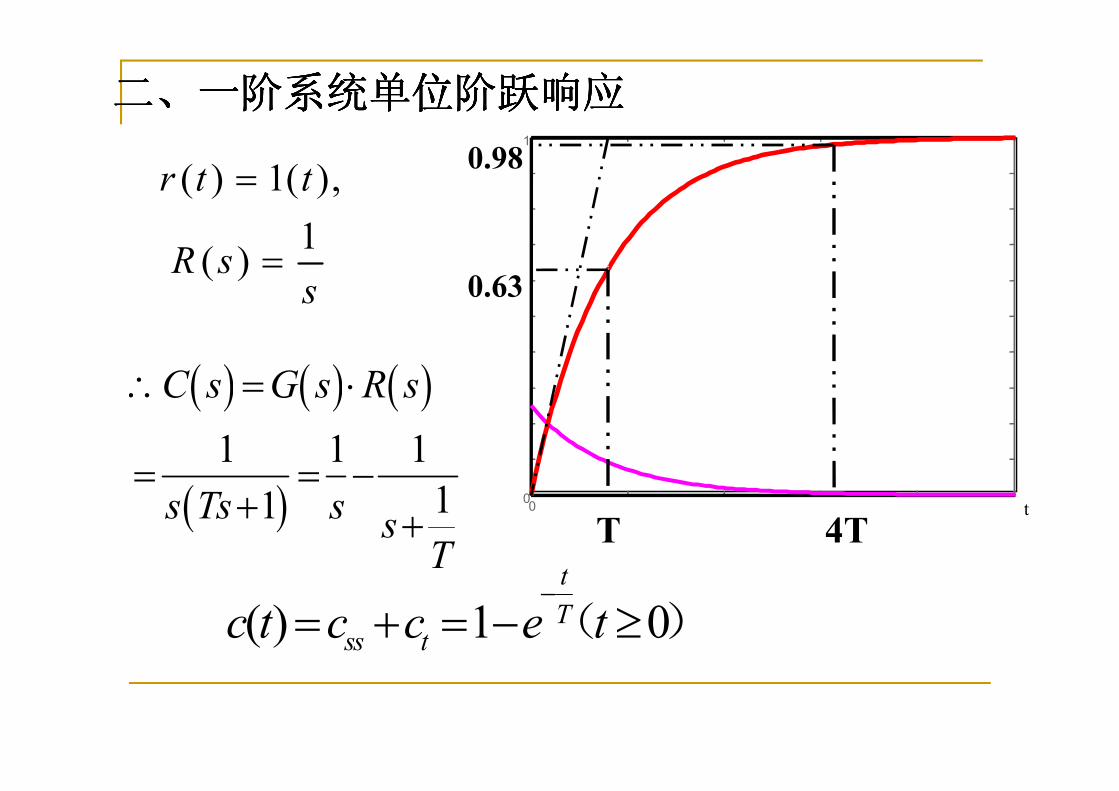
二二二二二二二二 一阶系统单位阶跃响应一阶系统单位阶跃响应一阶系统单位阶跃响应一阶系统单位阶跃响应一阶系统单位阶跃响应一阶系统单位阶跃响应一阶系统单位阶跃响应一阶系统单位阶跃响应
( ) 1( ),
1 ( )
r t t
R ss
=
=
( ) ( ) ( )C s G s R s∴ = ⋅
1
0.98
0.63
( ) ( ) ( )
( )1 1 1
11
C s G s R s
s Ts ss
T
∴ = ⋅
= = −+ +
( ) 1 0t
Tss tc t c c e t
−= + = − ≥
T 4T00
t
00
( ) 1 1t
t
Tt
dc te
dt T T=
−
= = =
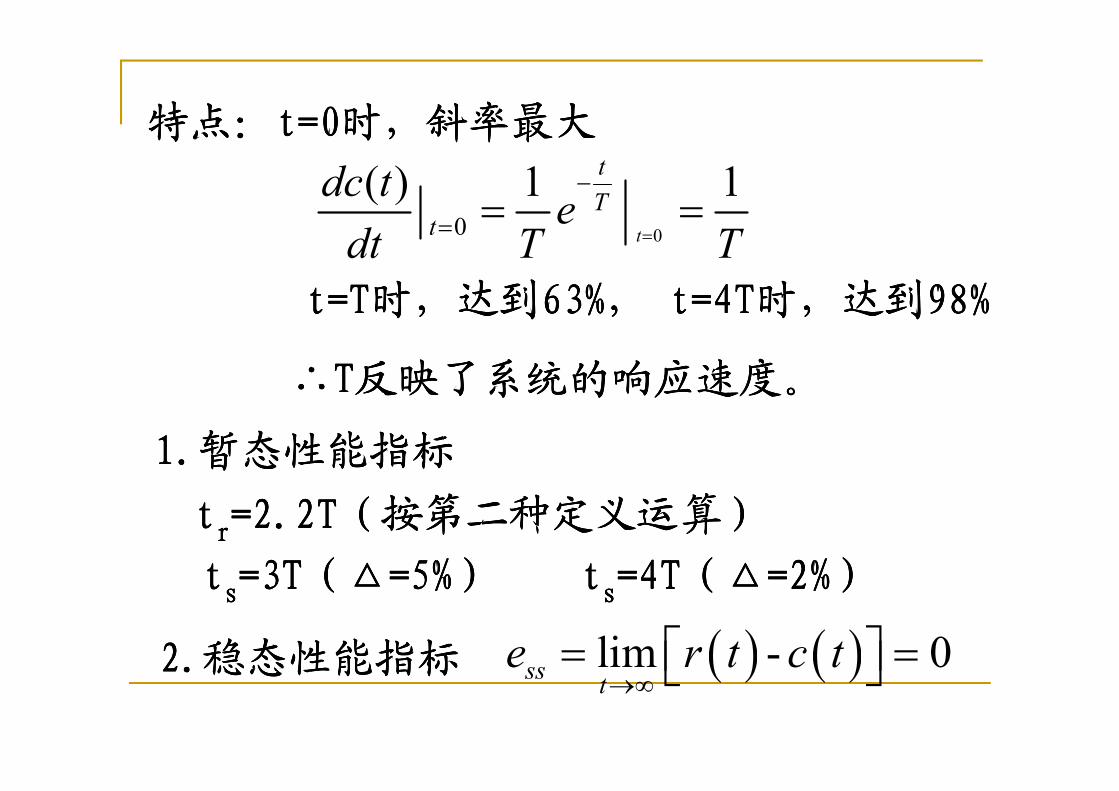
特点特点特点特点 t=,t=,t=,t=,时时时时 斜率最大斜率最大斜率最大斜率最大
t=Tt=Tt=Tt=T时时时时 达到达到达到达到63%63%63%63% t=4Tt=4Tt=4Tt=4T时时时时 达到达到达到达到98%98%98%98%
∴T∴T∴T∴T反映了系统的响应速度反映了系统的响应速度反映了系统的响应速度反映了系统的响应速度。。。。
( ) ( )lim - 0sst
e r t c t→∞
= =
∴T∴T∴T∴T反映了系统的响应速度反映了系统的响应速度反映了系统的响应速度反映了系统的响应速度。。。。
1.1.1.1.暂态 能指标暂态 能指标暂态 能指标暂态 能指标
2.2.2.2.稳态 能指标稳态 能指标稳态 能指标稳态 能指标
ttttrrrr
=2.2T=2.2T=2.2T=2.2T 按第二种定义运算按第二种定义运算按第二种定义运算按第二种定义运算
ttttssss
=3T=3T=3T=3T △△△△=5%=5%=5%=5% ttttssss
=4T=4T=4T=4T △△△△=2%=2%=2%=2%
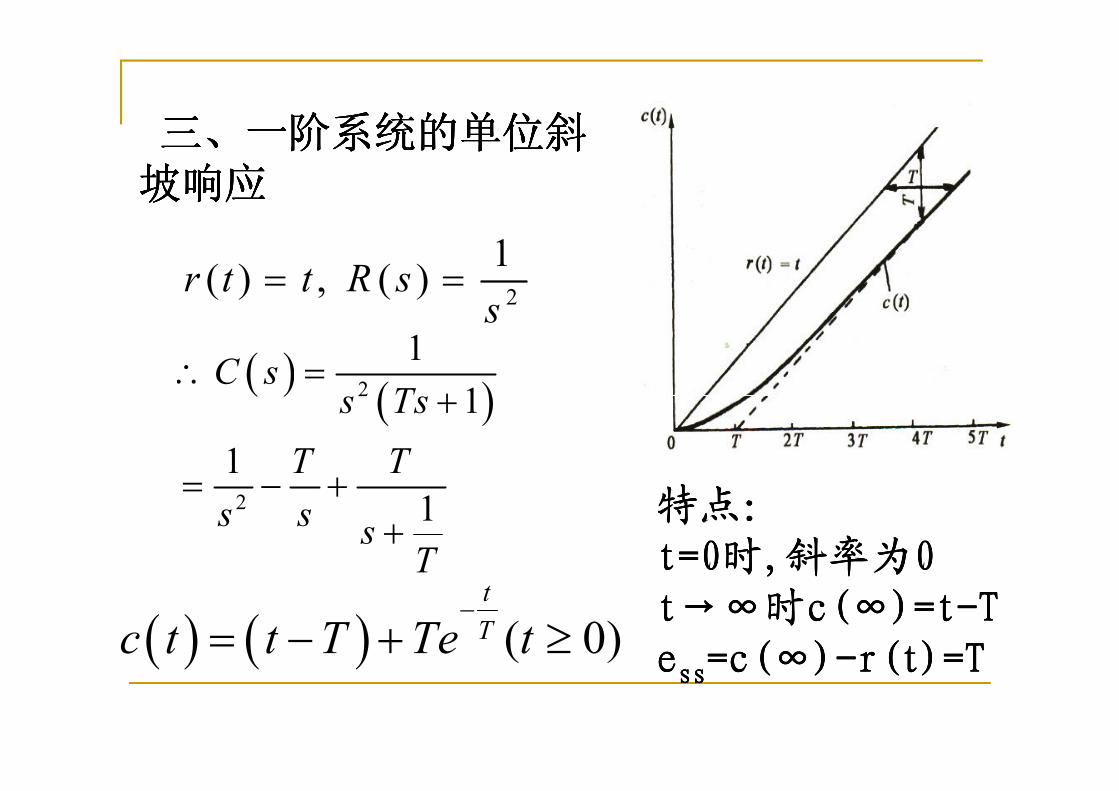
一阶系统的单位斜一阶系统的单位斜一阶系统的单位斜一阶系统的单位斜一阶系统的单位斜一阶系统的单位斜一阶系统的单位斜一阶系统的单位斜
坡响应坡响应坡响应坡响应坡响应坡响应坡响应坡响应
( )( )2
1
1C s
s Ts∴ =
+
2
1( ) , ( )r t t R s
s= =
( )( )2
2
1
1
1
s Ts
T T
s ss
T
+
= − ++
( ) ( ) ( 0)t
Tc t t T Te t−
= − + ≥
特点特点特点特点
t=t=t=t=,,,,时时时时((((斜率为斜率为斜率为斜率为,,,,
t→∞t→∞t→∞t→∞时时时时c(∞)=tc(∞)=tc(∞)=tc(∞)=t))))TTTT
eeeessssssss
=c(∞)=c(∞)=c(∞)=c(∞)))))r(t)=Tr(t)=Tr(t)=Tr(t)=T
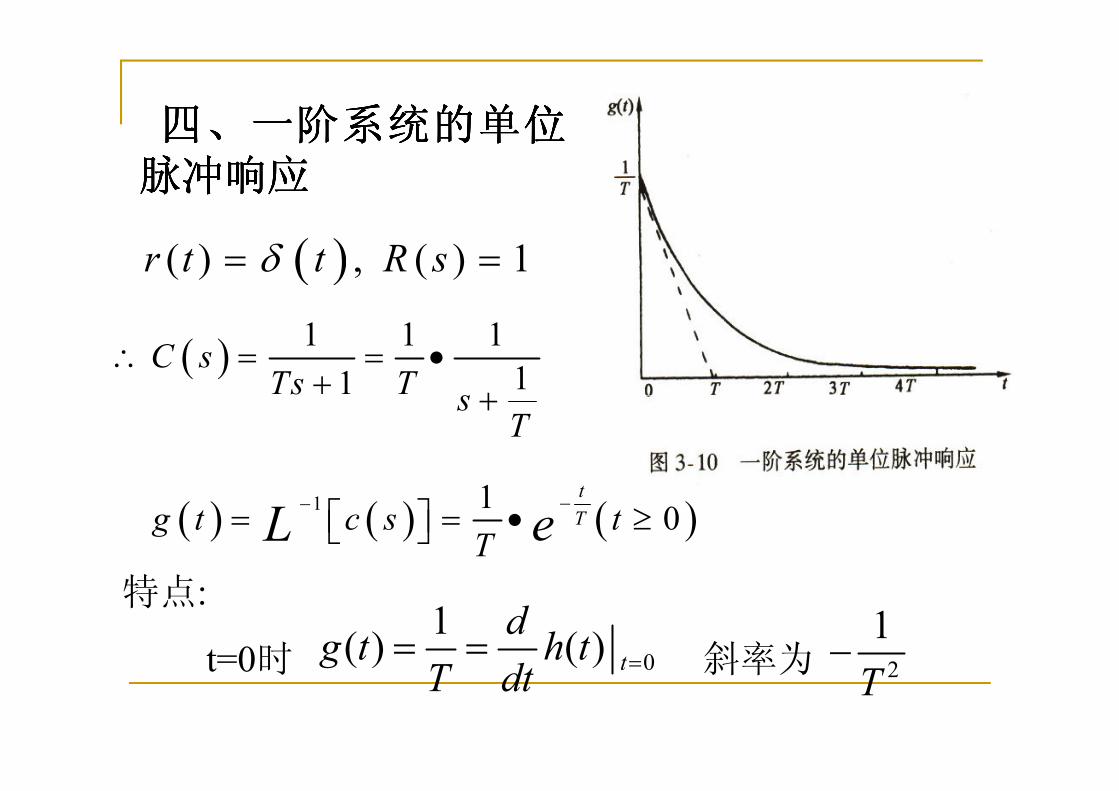
四四四四四四四四 一阶系统的单位一阶系统的单位一阶系统的单位一阶系统的单位一阶系统的单位一阶系统的单位一阶系统的单位一阶系统的单位
脉 响应脉 响应脉 响应脉 响应脉 响应脉 响应脉 响应脉 响应
( ) 1 1 1
11C s
Ts Ts
∴ = = •+ +
( )( ) , ( ) 1r t t R sδ= =
特点:
t=0时 斜率为0
1( ) ( ) t
dg t h t
T dt== =
11Ts Ts
T
+ +
( ) ( ) ( )1 10
t
Tg t c s tT
eL−−
= = • ≥
2
1
T−
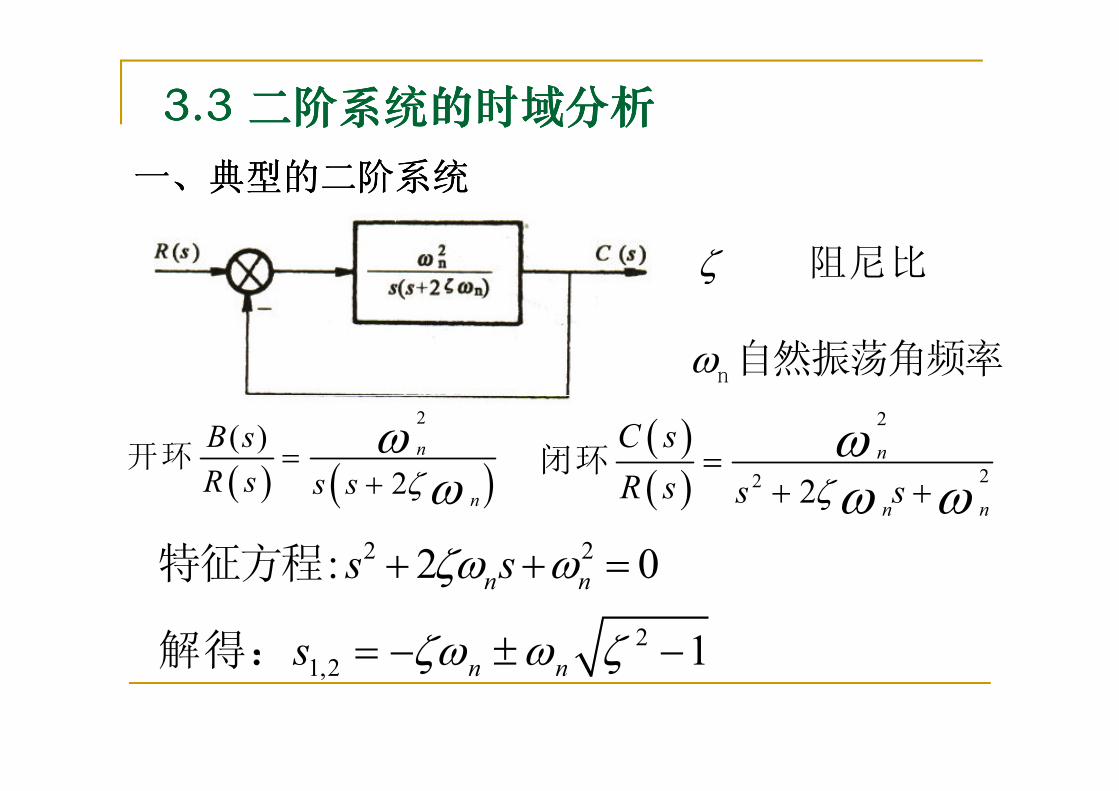
3.3 3.3 3.3 3.3 二阶系统的时域分析二阶系统的时域分析二阶系统的时域分析二阶系统的时域分析一一一一 型的二阶系统型的二阶系统型的二阶系统型的二阶系统
ζ 阻尼比
ωn
自然振荡角频率
( ) ( )
2
( )
2
n
n
B s
R s s s ζω
ω=
+开
( )( )
2
22 2
n
n n
C s
R s s sζωω ω
=+ +
2 2: 2 0n ns sζω ω+ + =特征方程
2
1,2 1n ns ζω ω ζ= − ± −解得
2
1,2 1n ns ζω ω ζ= − ± −
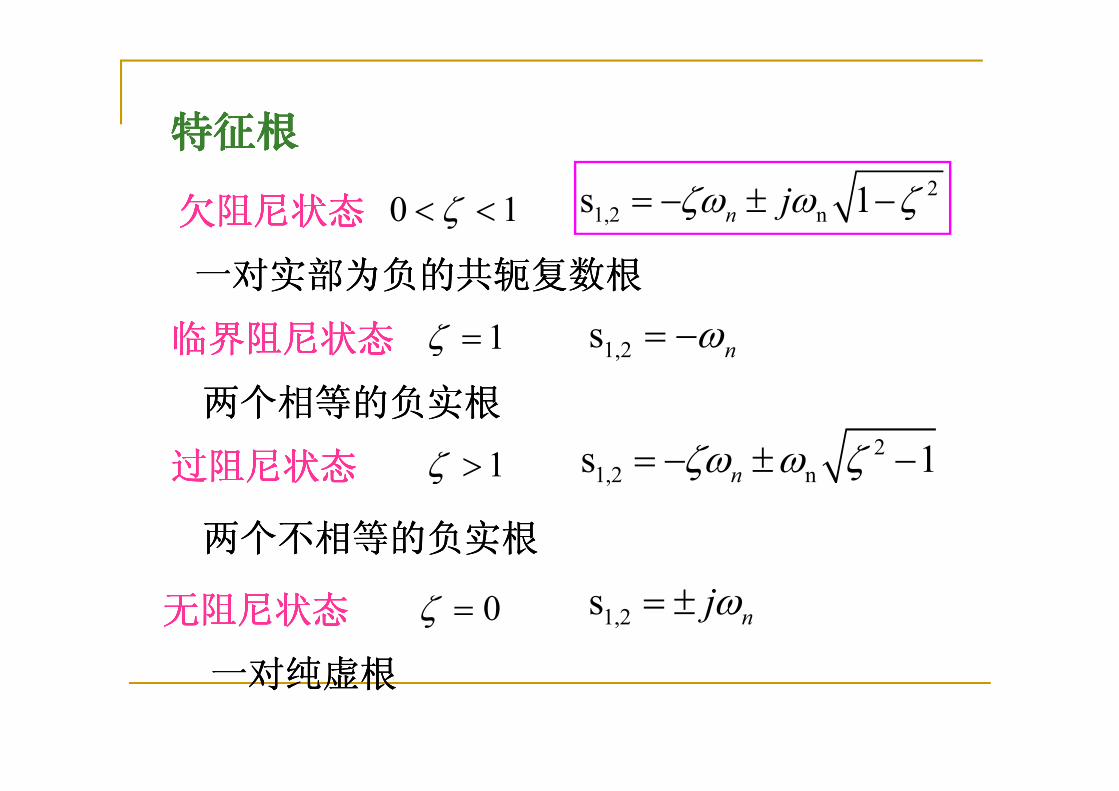
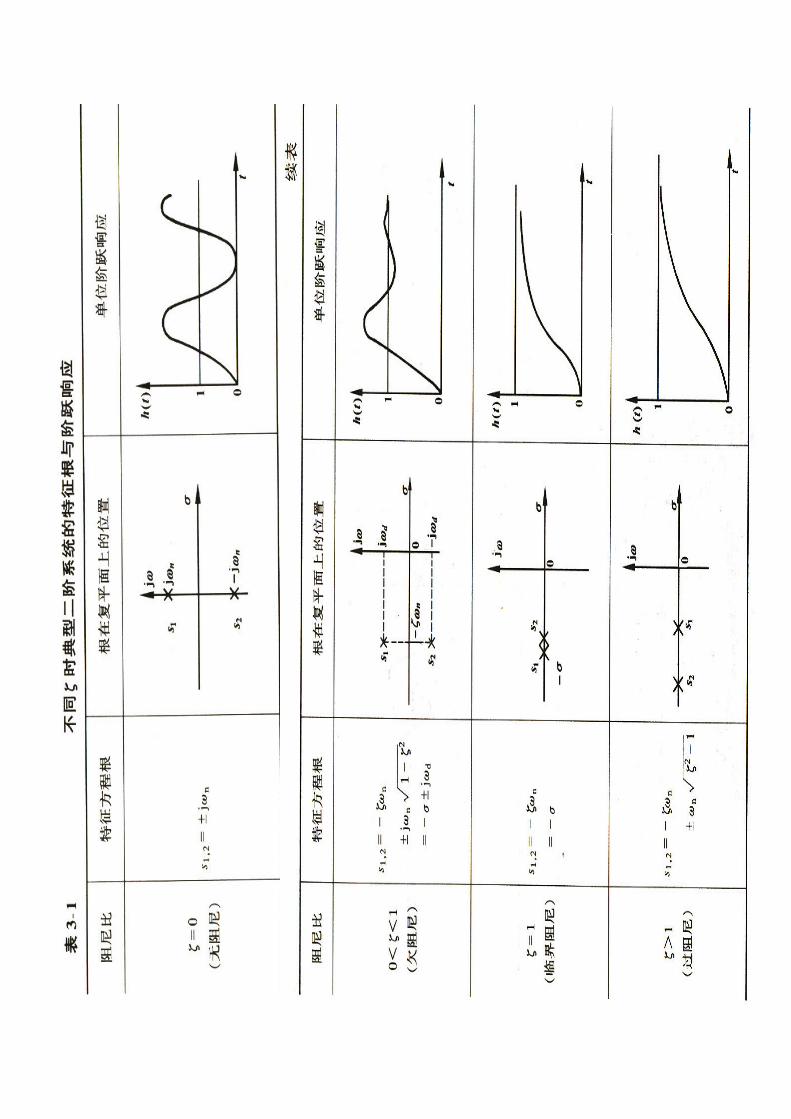
0 1ζ< <
1ζ =
特征根特征根特征根特征根特征根特征根特征根特征根
一对实部为负的共轭复数根一对实部为负的共轭复数根一对实部为负的共轭复数根一对实部为负的共轭复数根
2
1,2 ns 1n jζω ω ζ= − ± −阻尼状态阻尼状态阻尼状态阻尼状态阻尼状态阻尼状态阻尼状态阻尼状态
临界阻尼状态临界阻尼状态临界阻尼状态临界阻尼状态临界阻尼状态临界阻尼状态临界阻尼状态临界阻尼状态
两个相等的负实根两个相等的负实根两个相等的负实根两个相等的负实根
1,2s nω= −
0ζ =
1ζ >
两个相等的负实根两个相等的负实根两个相等的负实根两个相等的负实根
过阻尼状态过阻尼状态过阻尼状态过阻尼状态过阻尼状态过阻尼状态过阻尼状态过阻尼状态
2
1,2 ns 1nζω ω ζ= − ± −
两个 相等的负实根两个 相等的负实根两个 相等的负实根两个 相等的负实根
无阻尼状态无阻尼状态无阻尼状态无阻尼状态无阻尼状态无阻尼状态无阻尼状态无阻尼状态
一对纯虚根一对纯虚根一对纯虚根一对纯虚根
1,2s njω= ±
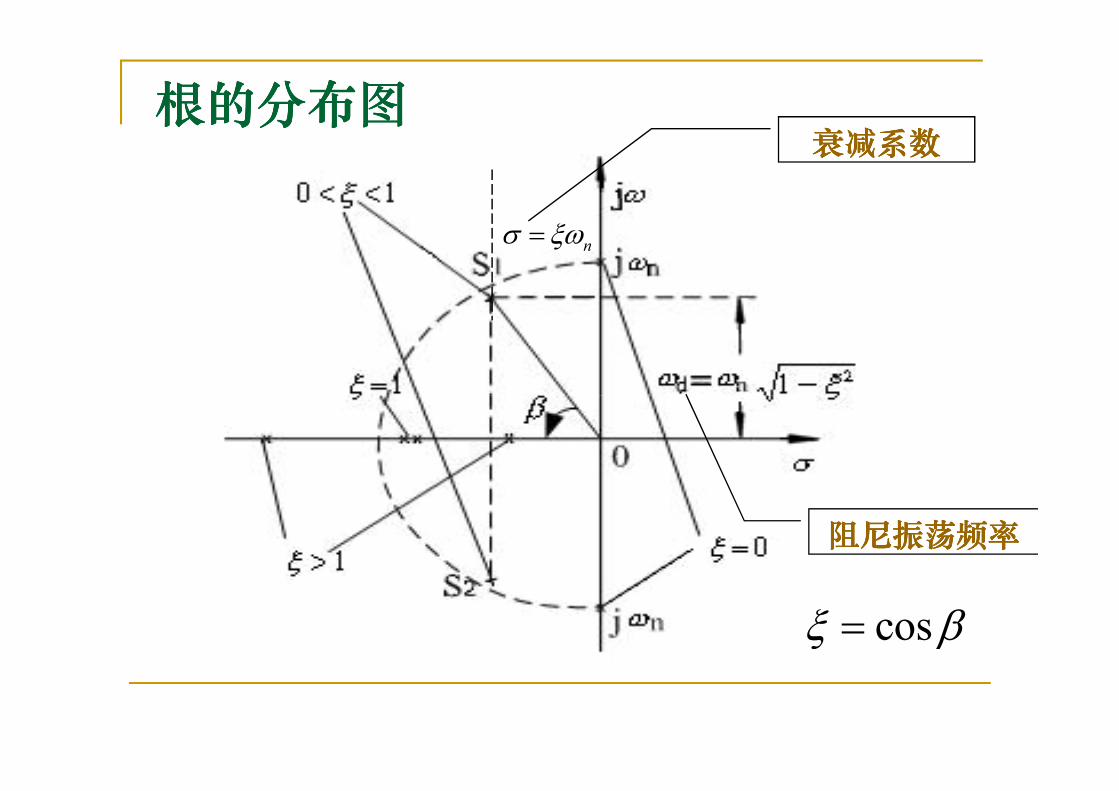
根的分布根的分布根的分布根的分布图图图图
nσ ξω=
衰减系数衰减系数衰减系数衰减系数
cosξ β=
阻尼振荡频率阻尼振荡频率阻尼振荡频率阻尼振荡频率
二二二二 二阶系统的单位阶跃响应二阶系统的单位阶跃响应二阶系统的单位阶跃响应二阶系统的单位阶跃响应
( )
( ) ( )
1, 2
2
2 2 2 2
1 1
( )
n
n
n n
s j
C ss s s s
ω
ωω ω
= ±
= = −+ +
时
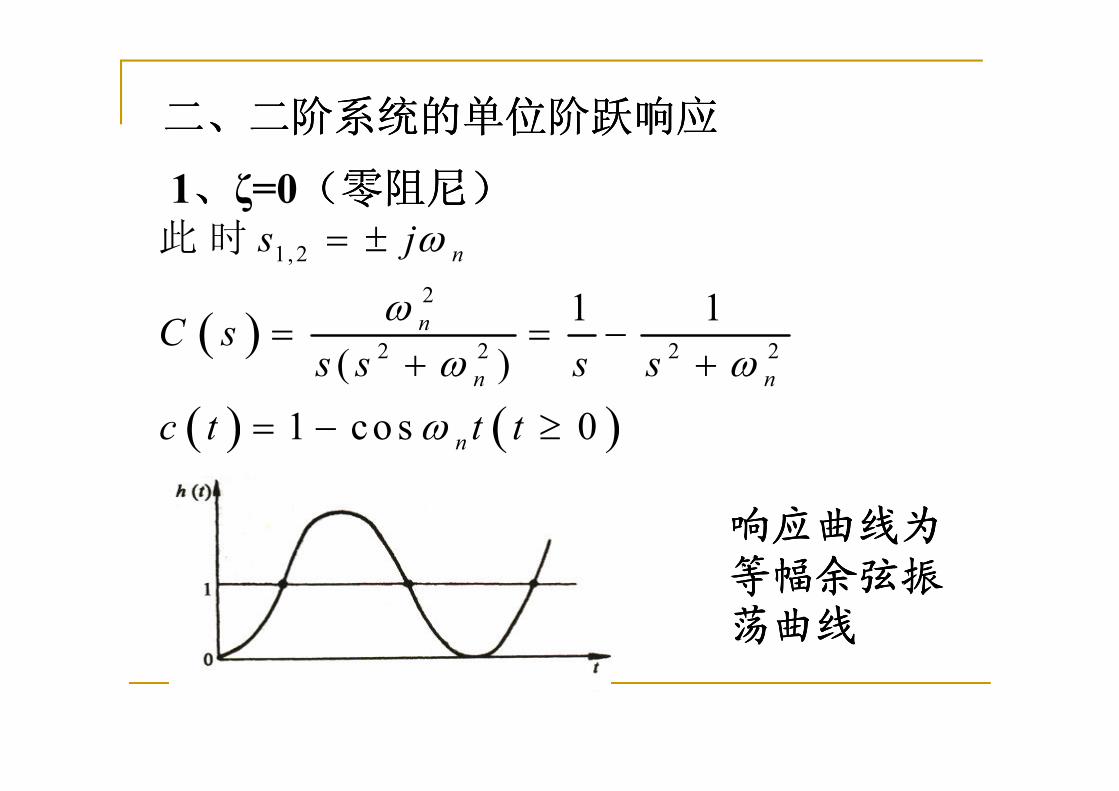
1 ζ=0 零阻尼零阻尼零阻尼零阻尼
( ) ( )1 co s 0nc t t tω= − ≥
响应曲线为响应曲线为响应曲线为响应曲线为
等幅余弦振等幅余弦振等幅余弦振等幅余弦振
荡曲线荡曲线荡曲线荡曲线
2 ζ>1(过阻尼过阻尼过阻尼过阻尼
2
1,2 ns 1nζω ω ζ= − ± −
21
( ) ( )( )
nC ss s s s s
ω= ×
− −
( ) ( ) ( )2 21 1
2 2 2
1 1 11
2 1 1 1
n nt t
C t e eξ ξ ω ξ ξ ω
ξ ξ ξ ξ ξ
− − − − + − = − −
− − − + −
1 2
( ) ( )( )
C ss s s s s
= ×− −
系统响应含有两个单调衰减的指数项系统响应含有两个单调衰减的指数项系统响应含有两个单调衰减的指数项系统响应含有两个单调衰减的指数项 因而因而因而因而
过阻尼二阶系统的单位阶跃响应是非振荡的过阻尼二阶系统的单位阶跃响应是非振荡的过阻尼二阶系统的单位阶跃响应是非振荡的过阻尼二阶系统的单位阶跃响应是非振荡的
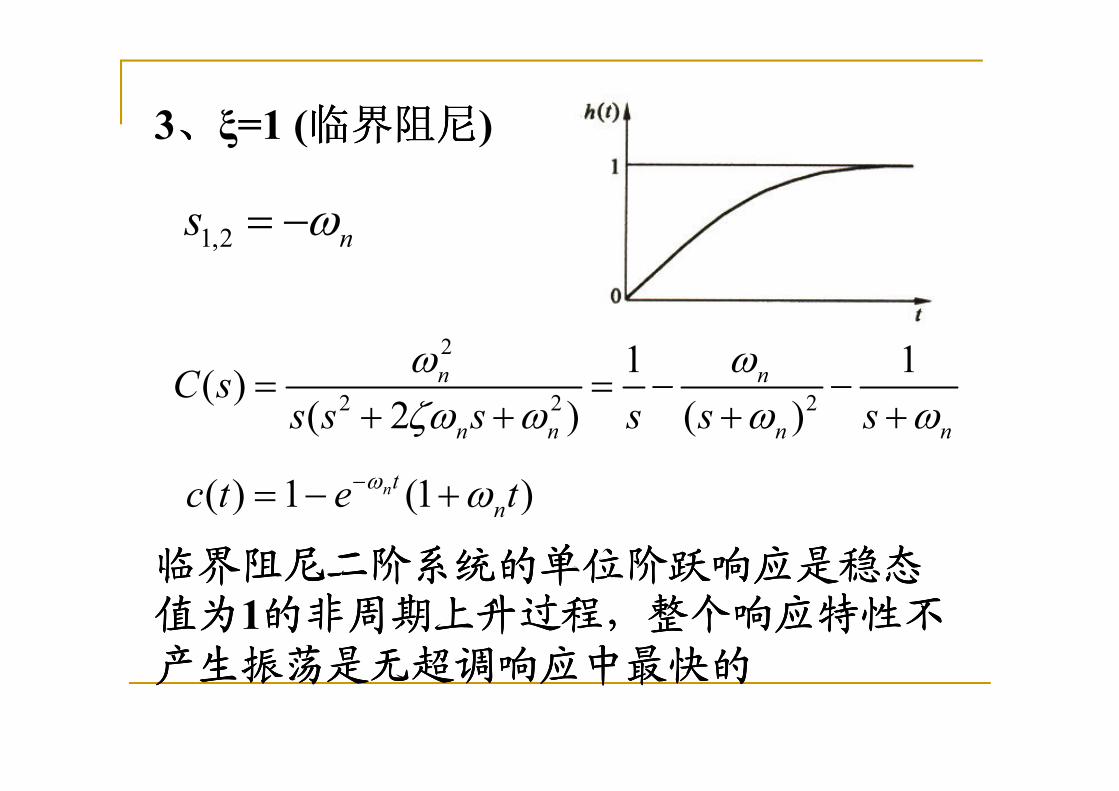
3 ξ=1 (临界阻尼临界阻尼临界阻尼临界阻尼)
1,2 ns ω= −
2
2 2 2
1 1( )
( 2 ) ( )
n nC ss s s s s s
ω ωζω ω ω ω
= = − −+ + + +2 2 2
( )( 2 ) ( )n n n n
C ss s s s s sζω ω ω ω
= = − −+ + + +
临界阻尼二阶系统的单位阶跃响应是稳态临界阻尼二阶系统的单位阶跃响应是稳态临界阻尼二阶系统的单位阶跃响应是稳态临界阻尼二阶系统的单位阶跃响应是稳态
值为值为值为值为1的非周期上升过程的非周期上升过程的非周期上升过程的非周期上升过程 整个响应特 不整个响应特 不整个响应特 不整个响应特 不
产生振荡是无超调响应中最快的产生振荡是无超调响应中最快的产生振荡是无超调响应中最快的产生振荡是无超调响应中最快的
( ) 1 (1 )nt
nc t e tω ω−= − +
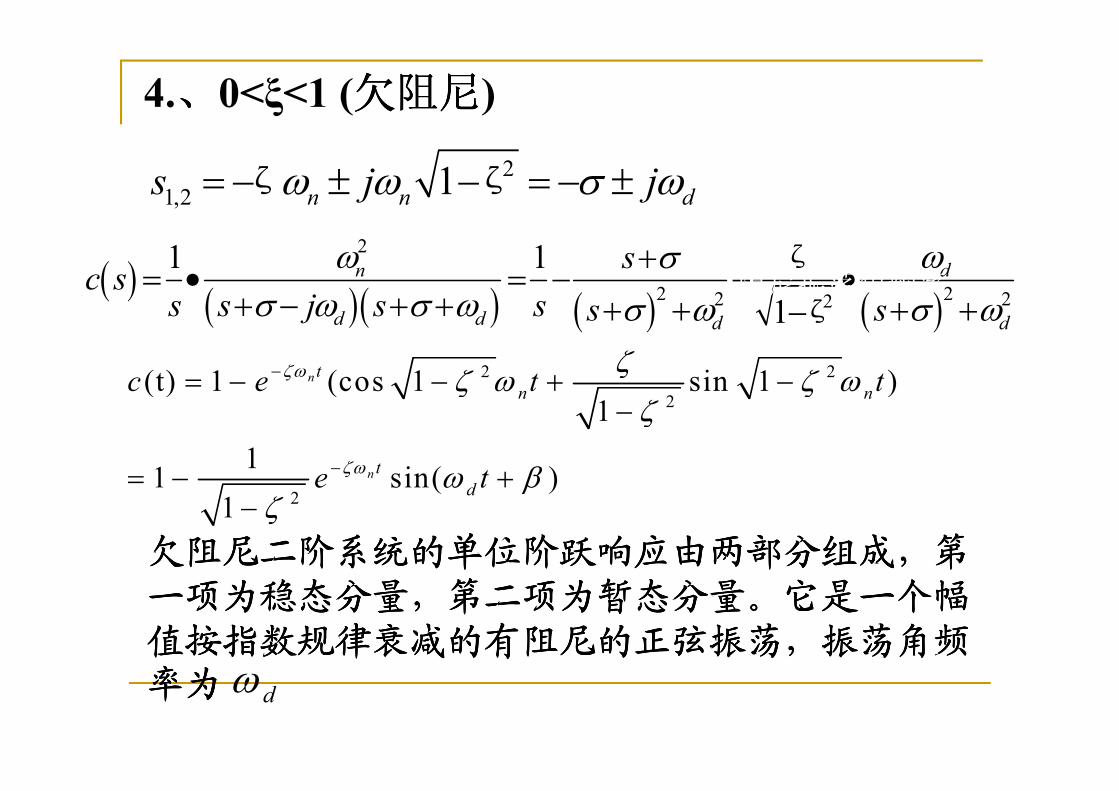
4. 0<ξ<1 ( 阻尼阻尼阻尼阻尼)
2
1,2 1n n ds j jω ω σ ω= − ± − = − ±ζ ζ
( )( )( ) ( ) ( )
2
2 22 22
1 1
1
n d
d d d d
sc s
s s j s s s s
ω ωσσ ω σ ω σ ω σ ω
+= • = − − •
+ − + + + + + +−
ζ
ζ
nσ ζω= 衰减系数
2
1d n ζω ω= −
阻尼振荡角频率
2 2
2(t) 1 (cos 1 sin 1 )
1
n t
n nc e t tζω ζ
ζ ω ζ ωζ
−= − − + −− 2
2
(t) 1 (cos 1 sin 1 )1
11 sin( )
1
n
n n
t
d
c e t t
e tζω
ζ ω ζ ωζ
ω βζ
−
= − − + −−
= − +−
arccosβ ζ=
欠阻尼二阶系统的单位阶跃响应由两部分组成欠阻尼二阶系统的单位阶跃响应由两部分组成欠阻尼二阶系统的单位阶跃响应由两部分组成欠阻尼二阶系统的单位阶跃响应由两部分组成 第第第第
一项为稳态分量一项为稳态分量一项为稳态分量一项为稳态分量 第二项为暂态分量第二项为暂态分量第二项为暂态分量第二项为暂态分量。。。。它是一个幅它是一个幅它是一个幅它是一个幅
值按指数规律衰减的有阻尼的正弦振荡值按指数规律衰减的有阻尼的正弦振荡值按指数规律衰减的有阻尼的正弦振荡值按指数规律衰减的有阻尼的正弦振荡 振荡角频振荡角频振荡角频振荡角频
率为率为率为率为 dω
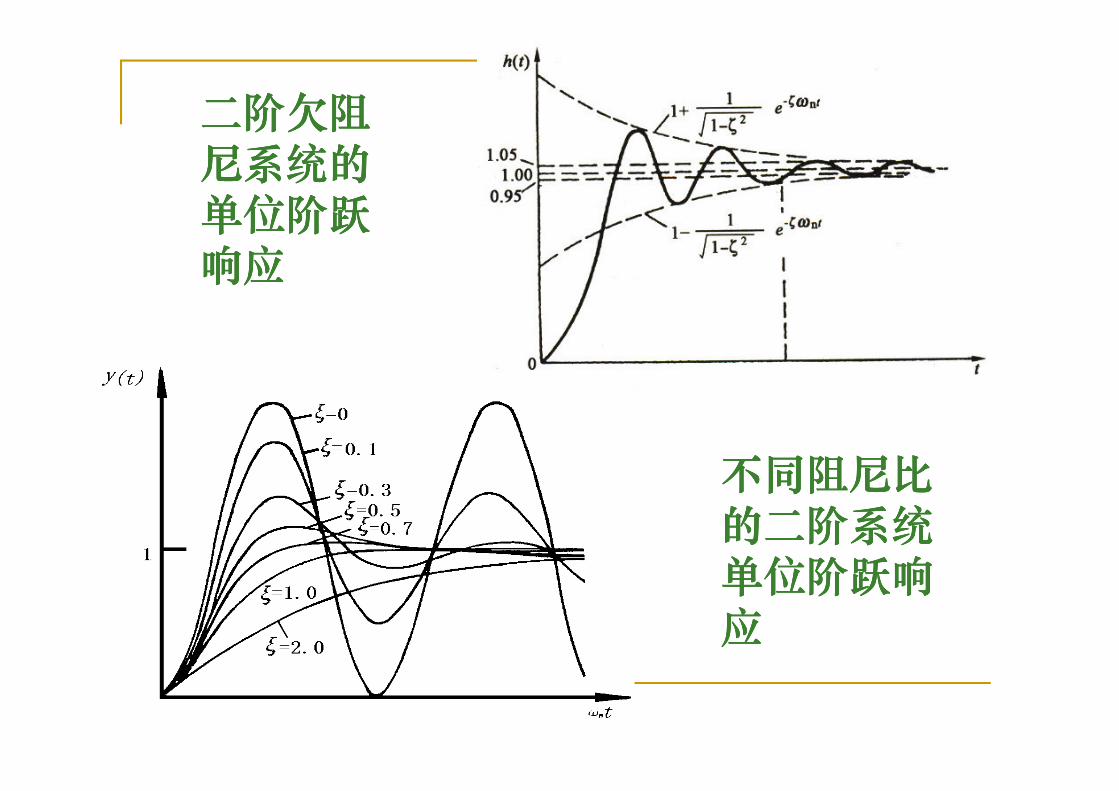
二阶欠阻二阶欠阻二阶欠阻二阶欠阻尼系统的尼系统的尼系统的尼系统的单位阶跃单位阶跃单位阶跃单位阶跃响应响应响应响应
不同阻尼比不同阻尼比不同阻尼比不同阻尼比的二阶系统的二阶系统的二阶系统的二阶系统单位阶跃响单位阶跃响单位阶跃响单位阶跃响应应应应
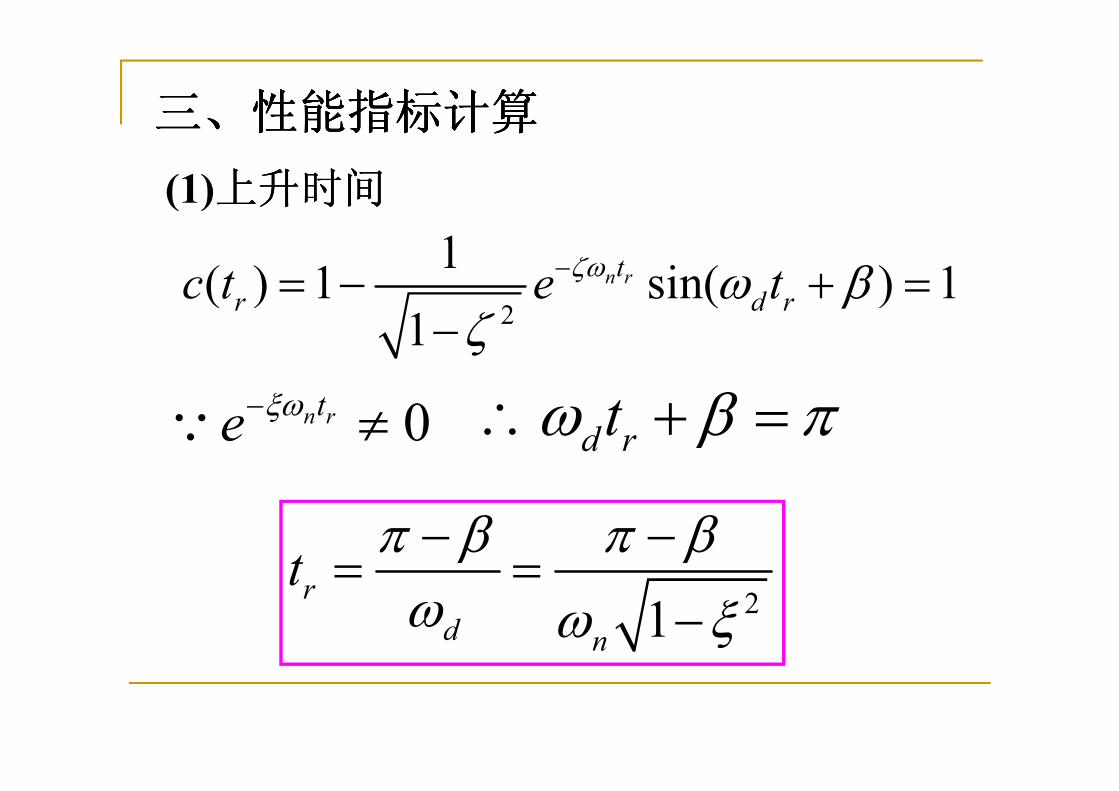
性能指标计算性能指标计算性能指标计算性能指标计算性能指标计算性能指标计算性能指标计算性能指标计算
rt
0t
eξω− ≠ tω β π∴ + =
2
1( ) 1 sin( ) 1
1
n rt
r d rc t e tζω ω β
ζ−= − + =
−
(1) 升时间升时间升时间升时间
0n rteξω− ≠Q d rtω β π∴ + =
21r
d n
tπ β π βω ω ξ
− −= =
−
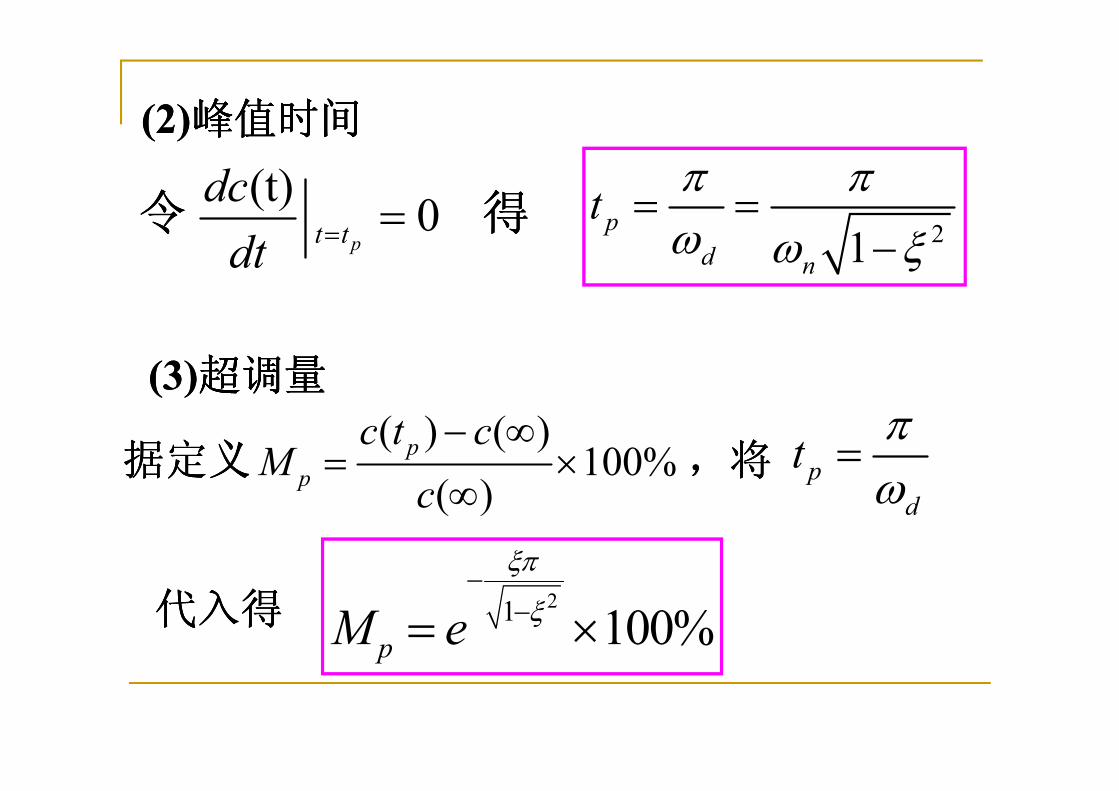
((22))峰值时间峰值时间峰值时间峰值时间峰值时间峰值时间峰值时间峰值时间 pt
21p
d n
tπ πω ω ξ
= =−
(3)(3)超调量超调量超调量超调量超调量超调量超调量超调量
得得得得
(t)0
pt t
dc
dt= =
据定据定据定据定 ,,,,将将将将
(3)(3)
( ) ( )100%
( )
p
p
c t cM
c
− ∞= ×
∞p
d
tπω
=
21100%pM e
ξπ
ξ−
−= ×入得入得入得入得
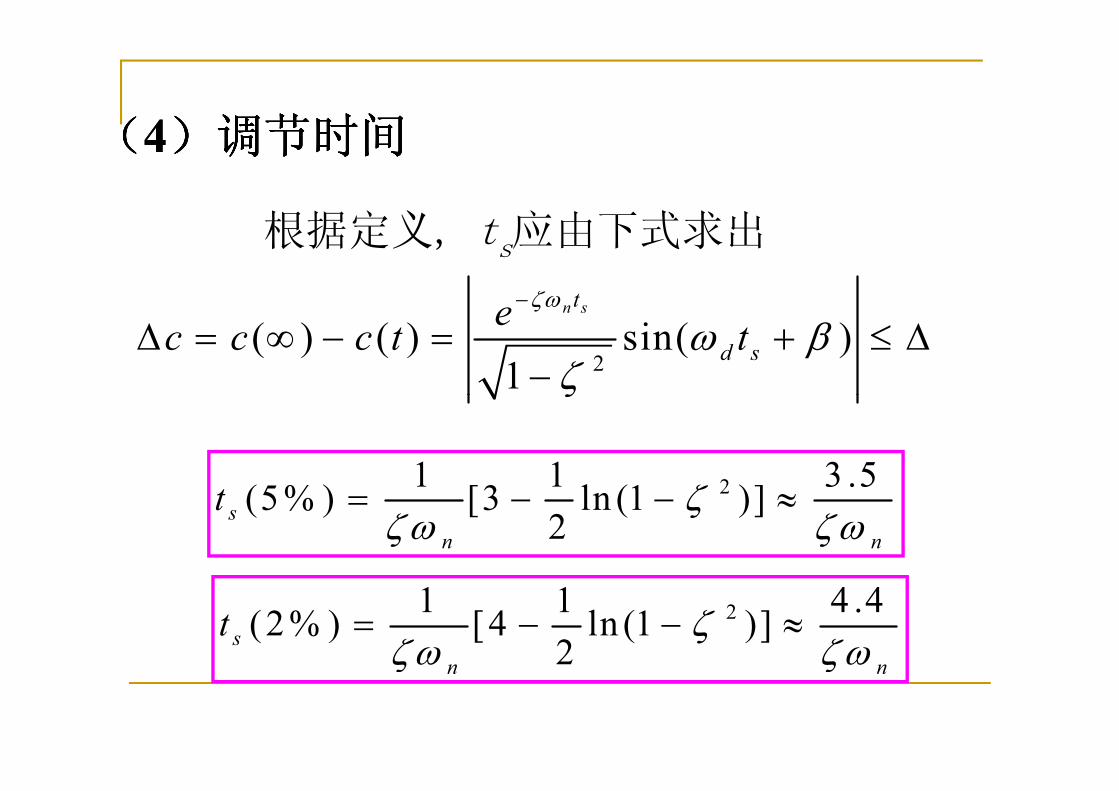
44 调节时间调节时间调节时间调节时间调节时间调节时间调节时间调节时间 st
根据定 , ts
应由 式求出
2( ) ( ) sin( )
1
n st
d s
ec c c t t
ζω
ω βζ
−
∆ = ∞ − = + ≤ ∆−1 ζ−
21 1 3 .5(5 % ) [3 ln (1 )]
2s
n n
t ζζω ζω
= − − ≈
21 1 4 .4(2% ) [4 ln (1 )]
2s
n n
t ζζω ζω
= − − ≈
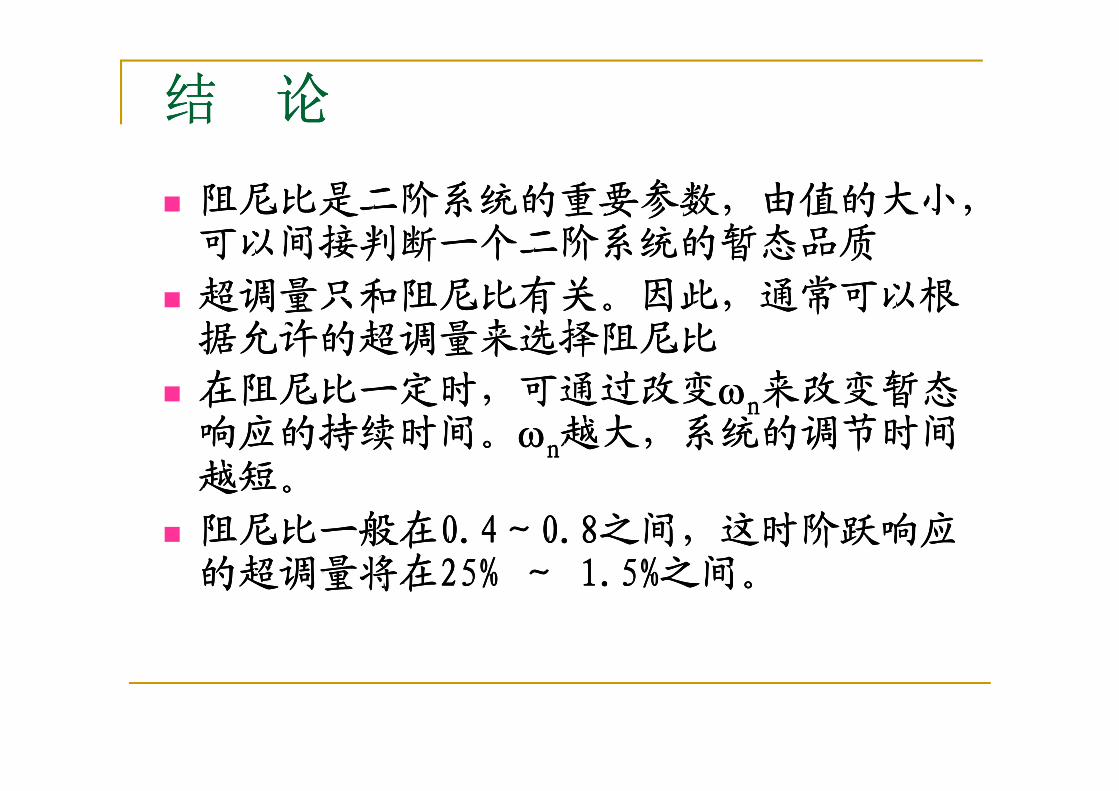
结结结结 论论论论
� 阻尼比是二阶系统的重要参数阻尼比是二阶系统的重要参数阻尼比是二阶系统的重要参数阻尼比是二阶系统的重要参数 由值的大小由值的大小由值的大小由值的大小
可以间接判断一个二阶系统的暂态品质可以间接判断一个二阶系统的暂态品质可以间接判断一个二阶系统的暂态品质可以间接判断一个二阶系统的暂态品质
� 超调量只和阻尼比有关超调量只和阻尼比有关超调量只和阻尼比有关超调量只和阻尼比有关。。。。因此因此因此因此 通常可以根通常可以根通常可以根通常可以根
据允许的超调量 选择阻尼比据允许的超调量 选择阻尼比据允许的超调量 选择阻尼比据允许的超调量 选择阻尼比
� 在阻尼比一定时在阻尼比一定时在阻尼比一定时在阻尼比一定时 可通过改变可通过改变可通过改变可通过改变ωωωωnnnn
改变暂态改变暂态改变暂态改变暂态� 在阻尼比一定时在阻尼比一定时在阻尼比一定时在阻尼比一定时 可通过改变可通过改变可通过改变可通过改变ωωωωnnnn
改变暂态改变暂态改变暂态改变暂态
响应的持续时间响应的持续时间响应的持续时间响应的持续时间。。。。ωωωωnnnn
越大越大越大越大 系统的调节时间系统的调节时间系统的调节时间系统的调节时间
越短越短越短越短。。。。
� 阻尼比一般在阻尼比一般在阻尼比一般在阻尼比一般在,.4,.4,.4,.4~~~~,.8,.8,.8,.8之间之间之间之间 这时阶跃响应这时阶跃响应这时阶跃响应这时阶跃响应
的超调量将在的超调量将在的超调量将在的超调量将在25% 25% 25% 25% ~~~~ 1.5%1.5%1.5%1.5%之间之间之间之间。。。。
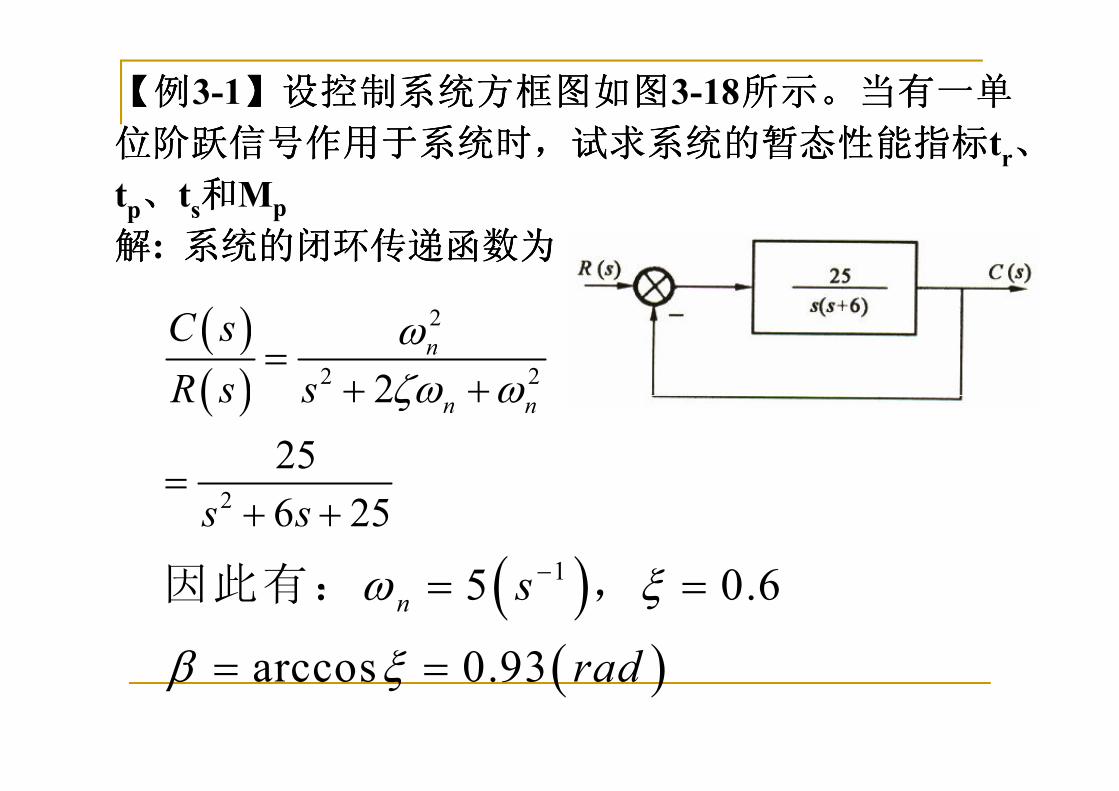
例例例例3-1 设控制系统方框图如图设控制系统方框图如图设控制系统方框图如图设控制系统方框图如图3-18所示所示所示所示 当有一单当有一单当有一单当有一单
位阶跃信号作用于系统时位阶跃信号作用于系统时位阶跃信号作用于系统时位阶跃信号作用于系统时,,,,试求系统的暂态性能指标试求系统的暂态性能指标试求系统的暂态性能指标试求系统的暂态性能指标tr
tp ts和和和和Mp
解解解解: 系统的 传递函数为系统的 传递函数为系统的 传递函数为系统的 传递函数为
( )( )
2
2 22
n
n n
C s
R s s
ωζω ω
=+ +( )
2
2
25
6 25
n nR s s
s s
ζω ω+ +
=+ +
( )( )
15 0.6
arccos 0.93
n s
rad
ω ξ
β ξ
−= =
= =
因 有 ,
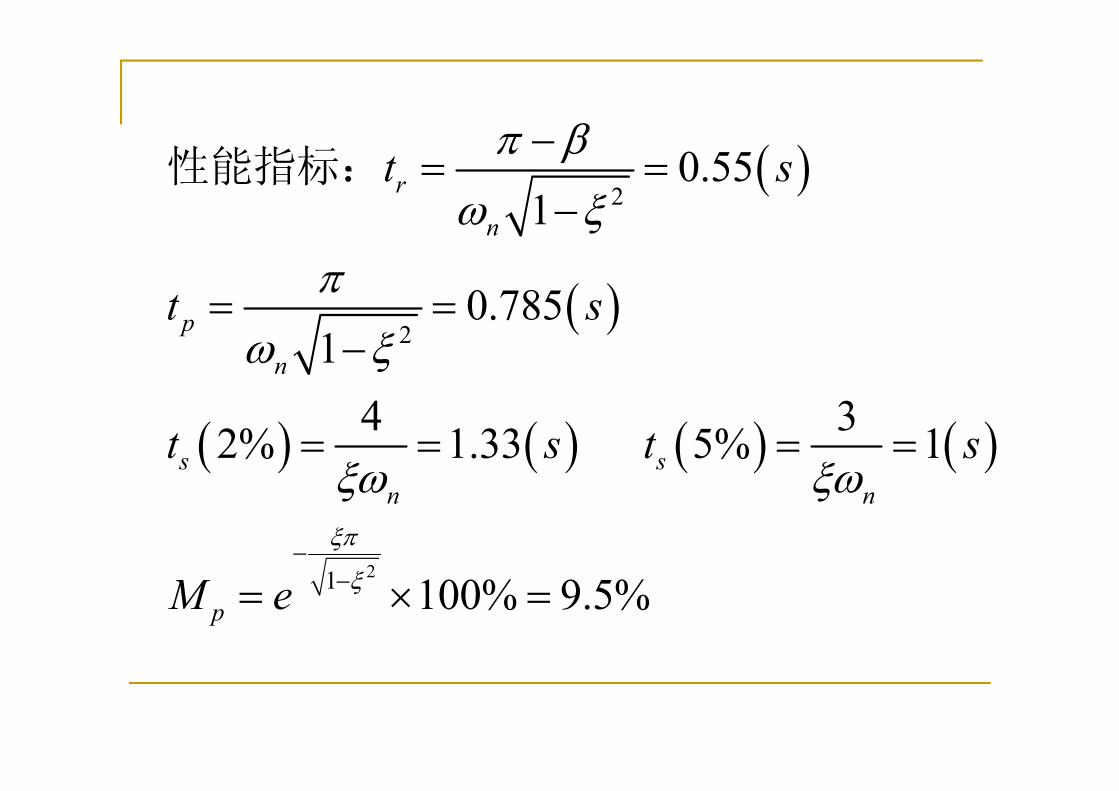
( )
( )
2
2
0.551
0.7851
4 3
r
n
p
n
t s
t s
π β
ω ξ
π
ω ξ
−= =
−
= =−
性能指标
( ) ( ) ( ) ( )
21
4 32% 1.33 5% 1
100% 9.5%
s s
n n
p
t s t s
M e
ξπ
ξ
ξω ξω
−−
= = = =
= × =
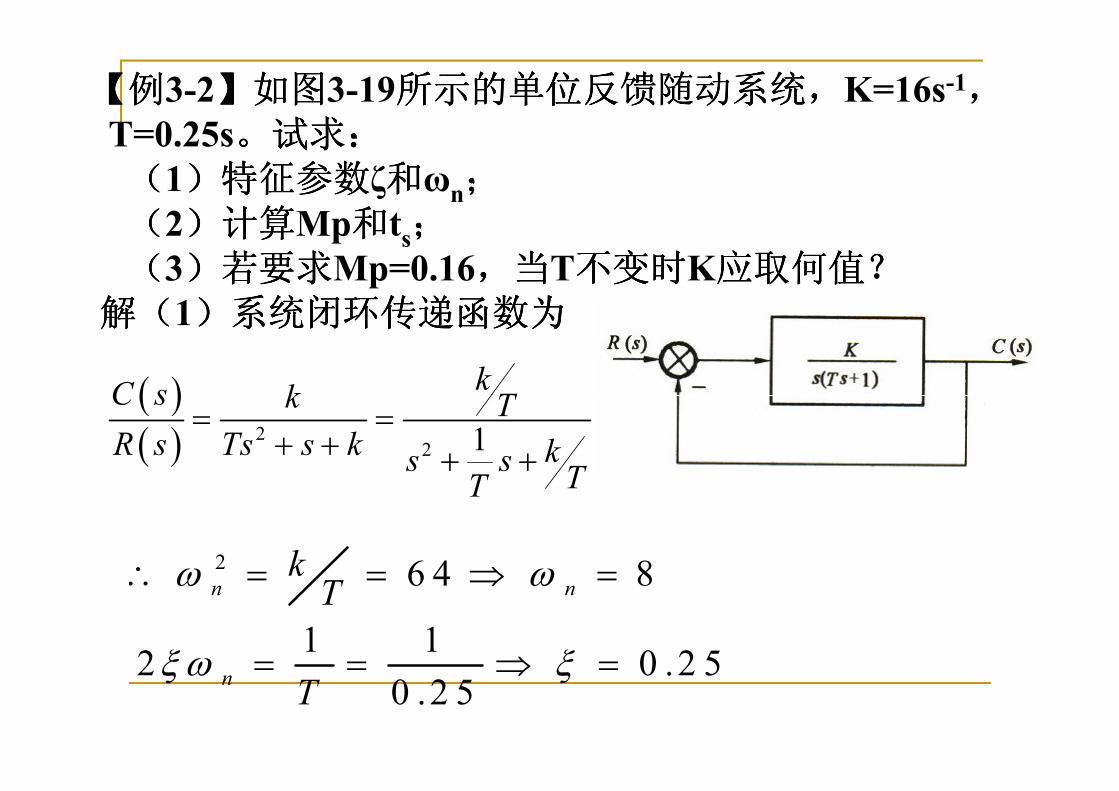
例例例例3-2 如图如图如图如图3-19所示的单位反馈随 系统所示的单位反馈随 系统所示的单位反馈随 系统所示的单位反馈随 系统,,,,K=16s-1,,,,
T=0.25s 试求试求试求试求
1 特征参数特征参数特征参数特征参数ζ和和和和ωn
2 计算计算计算计算Mp和和和和ts
3 若要求若要求若要求若要求Mp=0.16,,,,当当当当T 变时变时变时变时K应取何值应取何值应取何值应取何值????
解解解解 1 系统 传递函数为系统 传递函数为系统 传递函数为系统 传递函数为
( ) kC s k T= =( )( ) 2
2 1
kC s k T
R s Ts s k ks sTT
= =+ + + +
2 6 4 8
1 12 0 .2 5
0 .2 5
n n
n
kT
T
ω ω
ξω ξ
∴ = = ⇒ =
= = ⇒ =
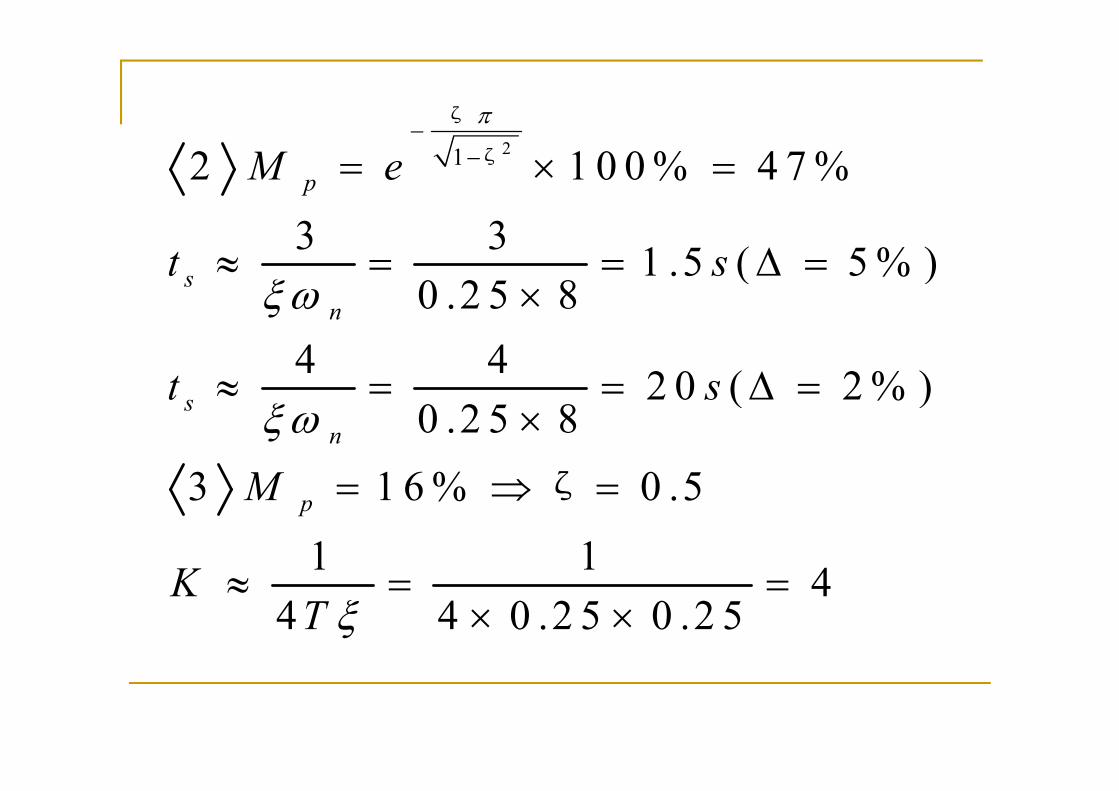
212 1 0 0 % 4 7 %
3 31 .5 ( 5 % )
0 .2 5 8
4 42 0 ( 2 % )
0 .2 5 8
p
s
n
s
M e
t s
t s
π
ξω
ξω
−−= × =
≈ = = ∆ =×
≈ = = ∆ =×
ζ
ζ
2 0 ( 2 % )0 .2 5 8
3 1 6 % 0 .5
1 14
4 4 0 .2 5 0 .2 5
s
n
p
t s
M
KT
ξω
ξ
≈ = = ∆ =×
= ⇒ =
≈ = =× ×
ζ
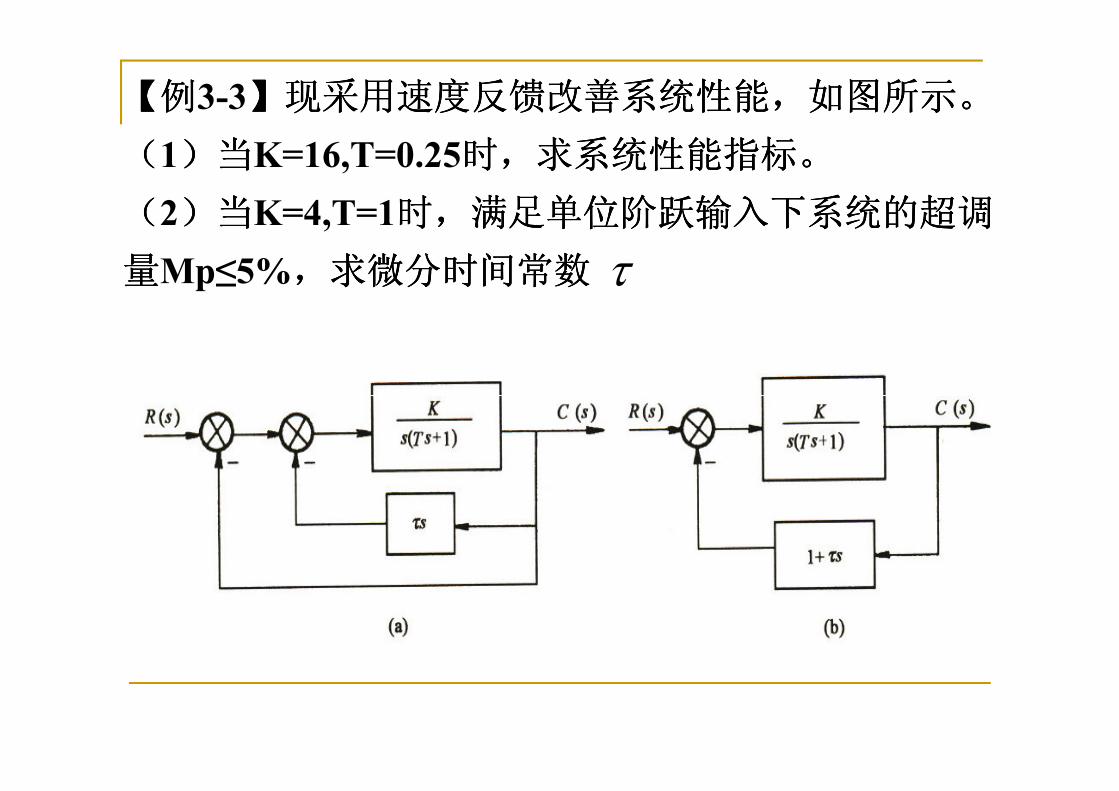
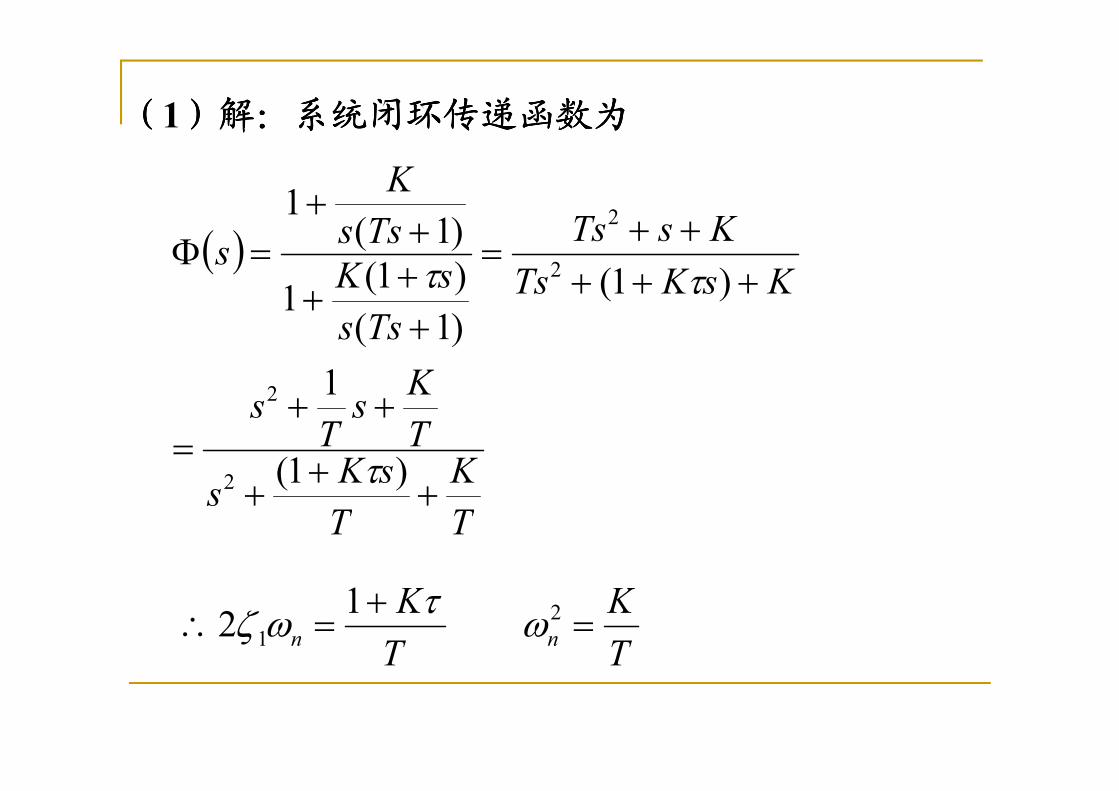
例例例例3-3 采用速度反馈改善系统性能采用速度反馈改善系统性能采用速度反馈改善系统性能采用速度反馈改善系统性能,,,,如图所示如图所示如图所示如图所示
1 当当当当K=16,T=0.25时时时时,,,,求系统性能指标求系统性能指标求系统性能指标求系统性能指标
2 当当当当K=4,T=1时时时时,,,,满足单位阶跃输入 系统的超调满足单位阶跃输入 系统的超调满足单位阶跃输入 系统的超调满足单位阶跃输入 系统的超调
量量量量Mp≤5%,,,,求微分时间常数求微分时间常数求微分时间常数求微分时间常数 τ
( )
Kss
KsKTs
KsTs
Tss
sK
Tss
K
s
++
+++++
=
++
+
++
=Φ
1
)1(
)1(
)1(1
)1(1
2
2
2
ττ
1 解解解解 系统闭环传递函数为系统闭环传递函数为系统闭环传递函数为系统闭环传递函数为
T
K
T
sKs
T
Ks
Ts
++
+
++=
)1(
1
2
2
τ
T
K
T
Knn =
+=∴ 2
1
12 ω
τωζ
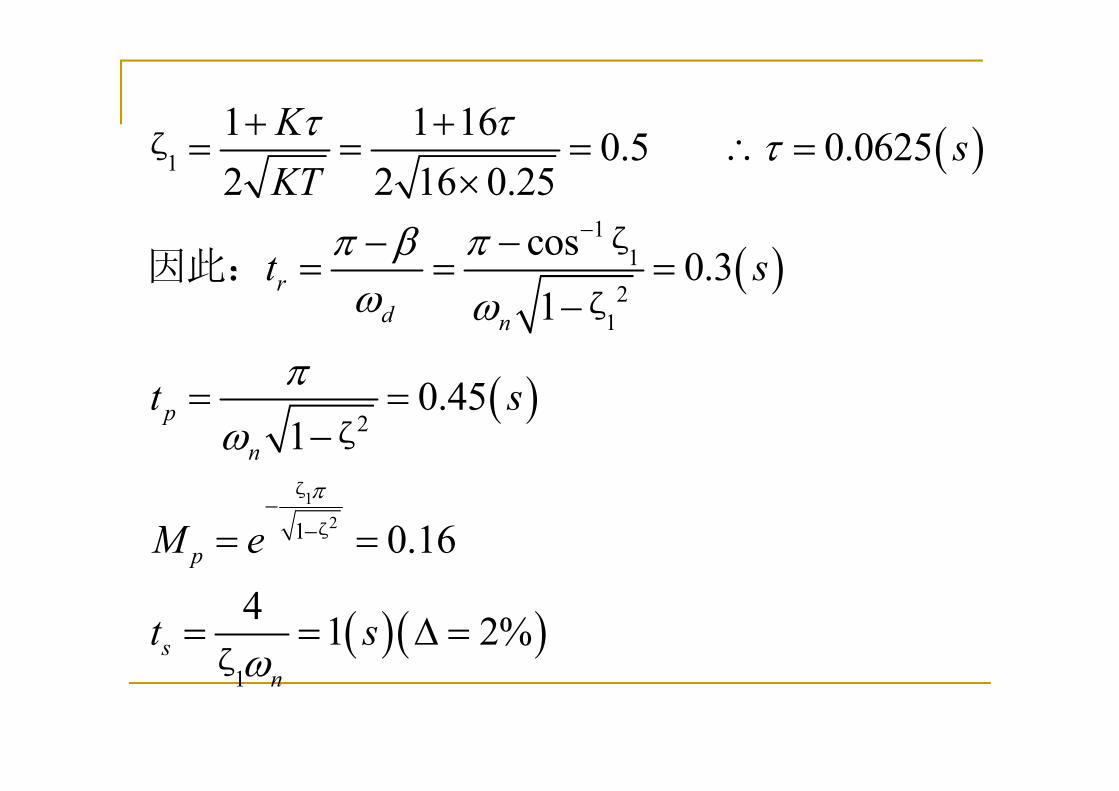
( )
( )
( )
1
1
1
2
1
1 1 160.5 0.0625
2 2 16 0.25
cos0.3
1
0.45
r
d n
Ks
KT
t s
t s
τ ττ
ππ βω ω
π
−
+ += = = ∴ =
×
−−= = =
−
= =
ζ
ζ
因
ζ
( )
( )( )
1
2
2
1
1
0.451
0.16
41 2%
p
n
p
s
n
t s
M e
t s
π
ω
ω
−−
= =−
= =
= = ∆ =
ζ
ζ
ζ
ζ
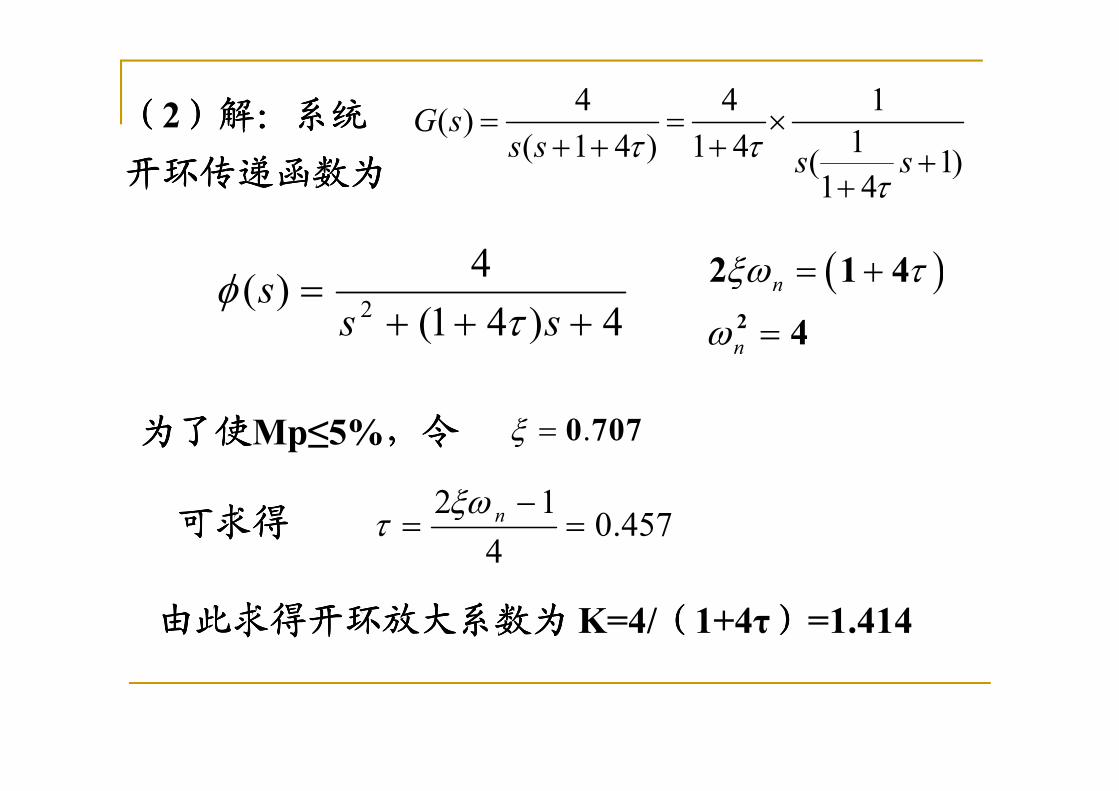
4)41(
4)(
2 +++=
sss
τφ ( )n
n
ξω τ
ω
= +
=2
2 1 4
4
4 4 1( )
1( 1 4 ) 1 4( 1)1 4
G ss s
s sτ τ
τ
= = ×+ + + +
+
2 解解解解 系统系统系统系统
开环传递函数为开环传递函数为开环传递函数为开环传递函数为
.ξ = 0 707
457.04
12=
−= nξω
τ
为了使为了使为了使为了使Mp≤5% 令令令令
由此求得开环放大系数为由此求得开环放大系数为由此求得开环放大系数为由此求得开环放大系数为 K=4/ 1+4τ =1.414
可求得可求得可求得可求得
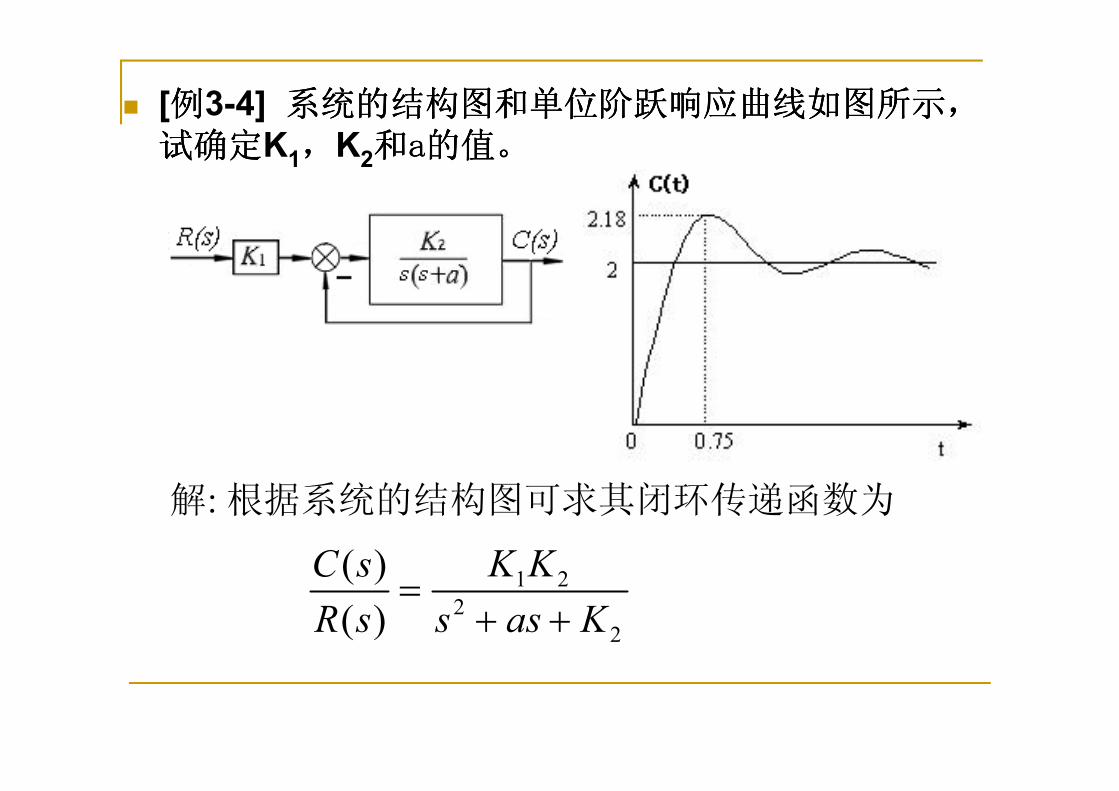
� [例例例例3-4] 系统的结构图和单位阶跃响应曲线如图所示系统的结构图和单位阶跃响应曲线如图所示系统的结构图和单位阶跃响应曲线如图所示系统的结构图和单位阶跃响应曲线如图所示,,,,
试确定试确定试确定试确定K1,,,,K2和和和和aaaa的值的值的值的值
1 2
2
2
( )
( )
K KC s
R s s as K=
+ +
解: 根据系统的结构图可求 传递函数为
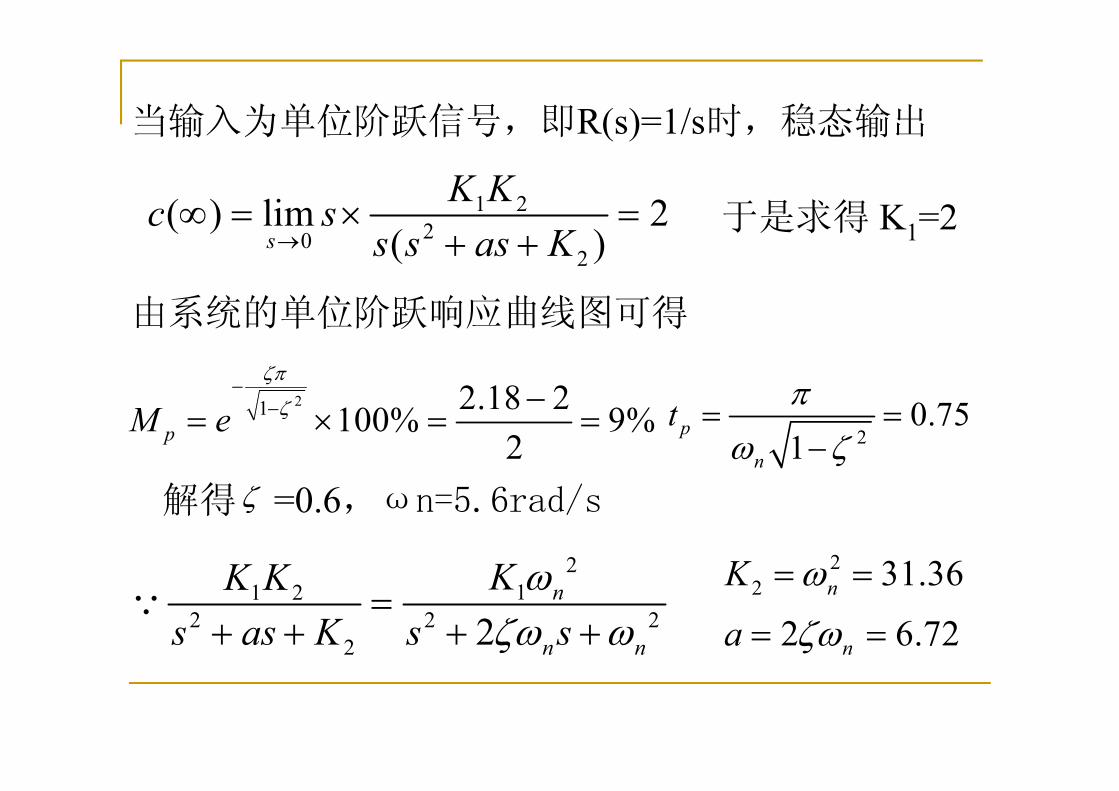
当输入为单位阶跃信号,即R(s)=1/s时,稳态输出
1 2
202
( ) lim 2( )s
K Kc s
s s as K→∞ = × =
+ +于是求得 K1=2
由系统的单位阶跃响应曲线图可得
2 2.18 2ζπ
ζ−
− −0.75t
π= =
21 2.18 2100% 9%
2pM e
ζ−
− −= × = =
2
2 31.36
2 6.72
n
n
K
a
ω
ζω
= =
= =
解得 =0.6,以n=5.6rad/sζ
2
11 2
2 2 2
2 2
n
n n
KK K
s as K s s
ωζω ω
=+ + + +
Q
20.75
1p
n
tπ
ω ζ= =
−
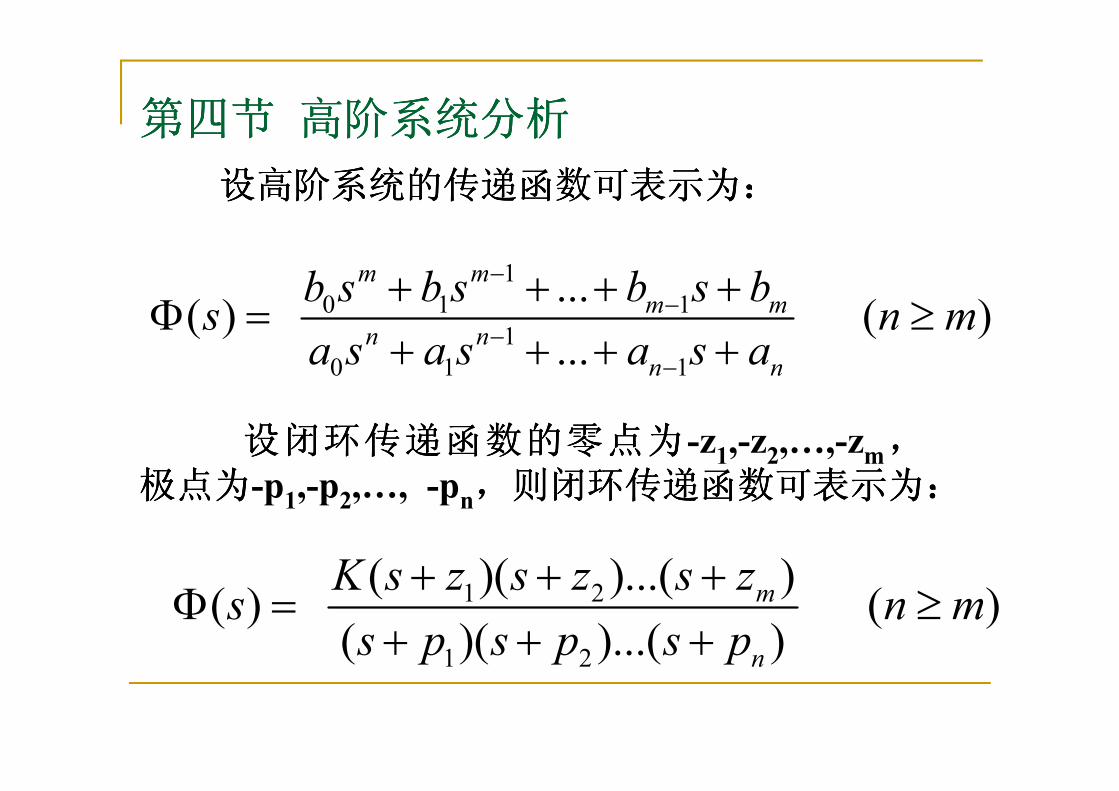
第四节第四节第四节第四节 高阶系统分析高阶系统分析高阶系统分析高阶系统分析
设高阶系统的传递函数可表示为设高阶系统的传递函数可表示为设高阶系统的传递函数可表示为设高阶系统的传递函数可表示为
1
0 1 1
1
0 1 1
...( ) ( )
...
m m
m m
n n
n n
b s b s b s bs n m
a s a s a s a
−−
−−
+ + + +Φ = ≥
+ + + +
设 传递函数的零点为设 传递函数的零点为设 传递函数的零点为设 传递函数的零点为-z1,-z2,…,-zm,,,,
极点为极点为极点为极点为-p1,-p2,…, -pn,,,,则 传递函数可表示为则 传递函数可表示为则 传递函数可表示为则 传递函数可表示为
1 2
1 2
( )( )...( )( ) ( )
( )( )...( )
m
n
K s z s z s zs n m
s p s p s p
+ + +Φ = ≥
+ + +
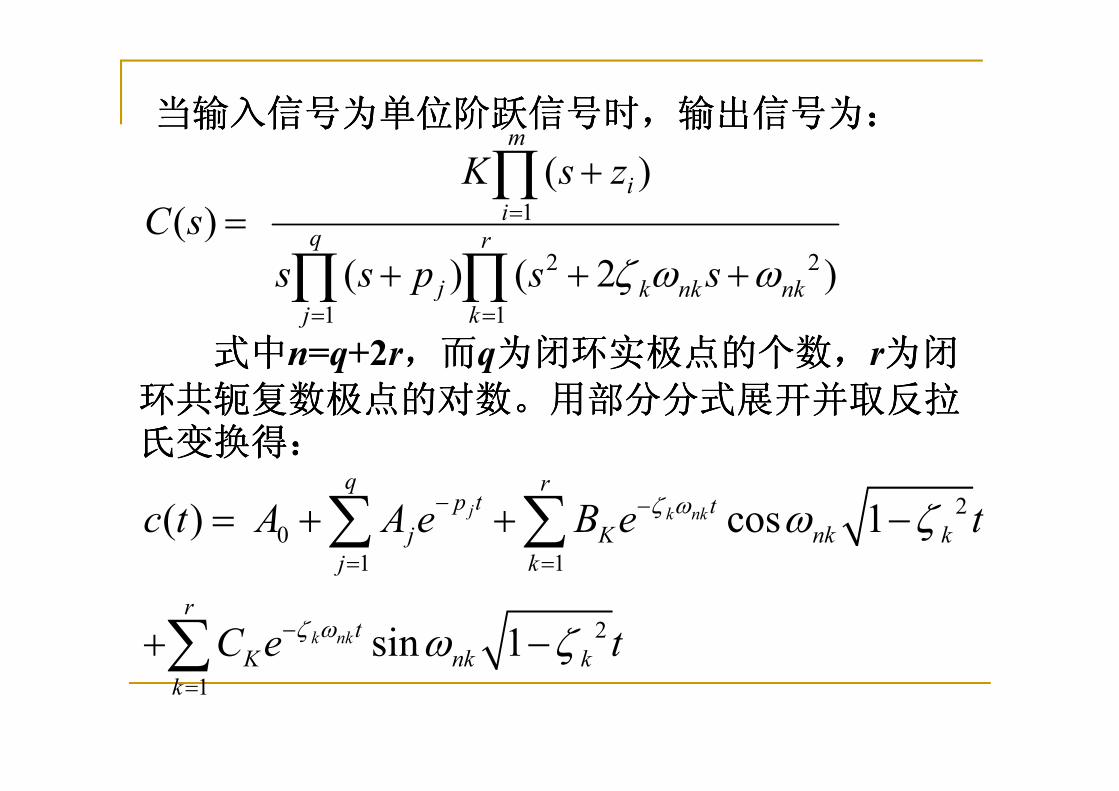
当输入信号为单位阶跃信号时当输入信号为单位阶跃信号时当输入信号为单位阶跃信号时当输入信号为单位阶跃信号时,,,,输出信号为输出信号为输出信号为输出信号为
1
2 2
1 1
( )
( )
( ) ( 2 )
m
ii
q r
j k nk nkj k
K s z
C s
s s p s sζ ω ω
=
= =
+=
+ + +
∏
∏ ∏式中式中式中式中n=q+2r,,,,而而而而q为 实极点的个数为 实极点的个数为 实极点的个数为 实极点的个数,,,,r为为为为
共轭复数极点的对数共轭复数极点的对数共轭复数极点的对数共轭复数极点的对数 用部分分式展开并取反拉用部分分式展开并取反拉用部分分式展开并取反拉用部分分式展开并取反拉
2
0
1 1
2
1
( ) cos 1
sin 1
j k nk
k nk
q rp t t
j K nk k
j k
rt
K nk k
k
c t A A e B e t
C e t
ζ ω
ζ ω
ω ζ
ω ζ
− −
= =
−
=
= + + −
+ −
∑ ∑
∑
共轭复数极点的对数共轭复数极点的对数共轭复数极点的对数共轭复数极点的对数 用部分分式展开并取反拉用部分分式展开并取反拉用部分分式展开并取反拉用部分分式展开并取反拉
氏变换得氏变换得氏变换得氏变换得
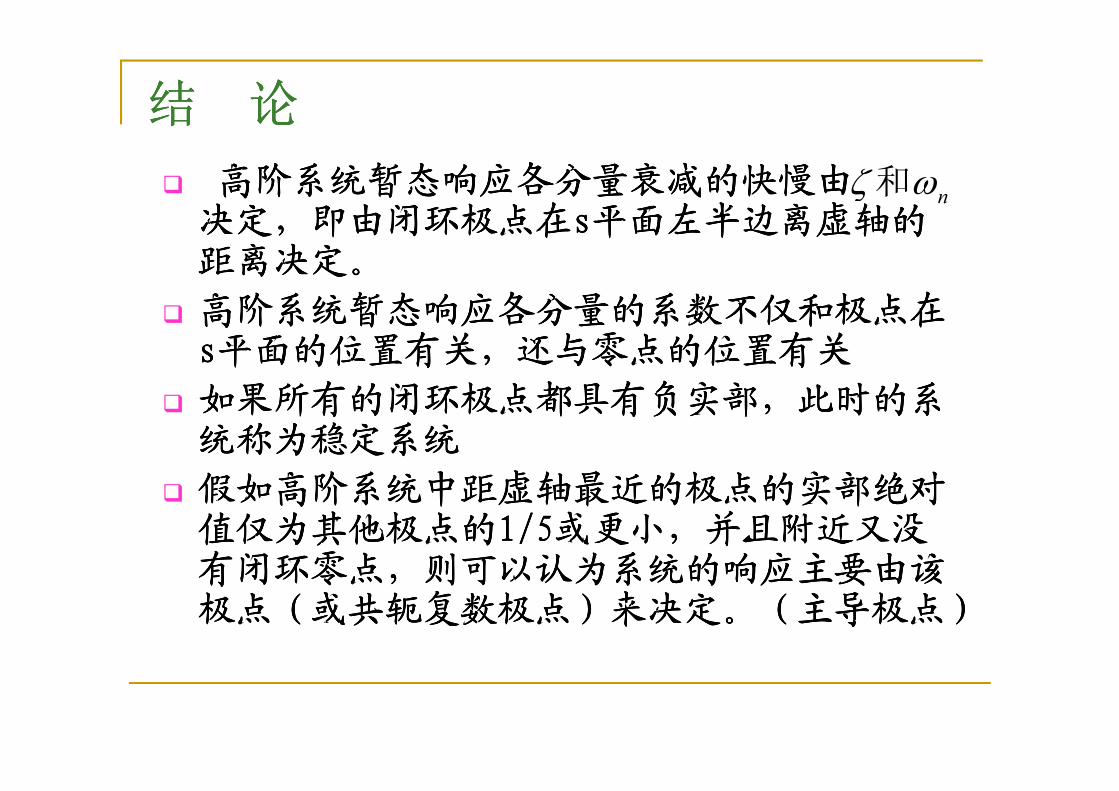
结结结结 论论论论
� 高阶系统暂态响应各分量衰减的快慢由高阶系统暂态响应各分量衰减的快慢由高阶系统暂态响应各分量衰减的快慢由高阶系统暂态响应各分量衰减的快慢由
决定决定决定决定 即由闭环极点在即由闭环极点在即由闭环极点在即由闭环极点在ssss平面左半边离虚轴的平面左半边离虚轴的平面左半边离虚轴的平面左半边离虚轴的
距离决定距离决定距离决定距离决定。。。。
� 高阶系统暂态响应各分量的系数不仅和极点在高阶系统暂态响应各分量的系数不仅和极点在高阶系统暂态响应各分量的系数不仅和极点在高阶系统暂态响应各分量的系数不仅和极点在
ssss平面的位置有关平面的位置有关平面的位置有关平面的位置有关 还与零点的位置有关还与零点的位置有关还与零点的位置有关还与零点的位置有关
� 如果所有的闭环极点都具有负实部如果所有的闭环极点都具有负实部如果所有的闭环极点都具有负实部如果所有的闭环极点都具有负实部 此时的系此时的系此时的系此时的系
nζ ω和
� 如果所有的闭环极点都具有负实部如果所有的闭环极点都具有负实部如果所有的闭环极点都具有负实部如果所有的闭环极点都具有负实部 此时的系此时的系此时的系此时的系
统称为稳定系统统称为稳定系统统称为稳定系统统称为稳定系统
� 假如高阶系统中距虚轴最近的极点的实部绝对假如高阶系统中距虚轴最近的极点的实部绝对假如高阶系统中距虚轴最近的极点的实部绝对假如高阶系统中距虚轴最近的极点的实部绝对
值仅为其他极点的值仅为其他极点的值仅为其他极点的值仅为其他极点的1+51+51+51+5或更小或更小或更小或更小 并且附近又没并且附近又没并且附近又没并且附近又没
有闭环零点有闭环零点有闭环零点有闭环零点 则可以认为系统的响应主要由该则可以认为系统的响应主要由该则可以认为系统的响应主要由该则可以认为系统的响应主要由该
极点极点极点极点 或或或或共轭复数极点共轭复数极点共轭复数极点共轭复数极点 决定决定决定决定。。。。 主导极点主导极点主导极点主导极点
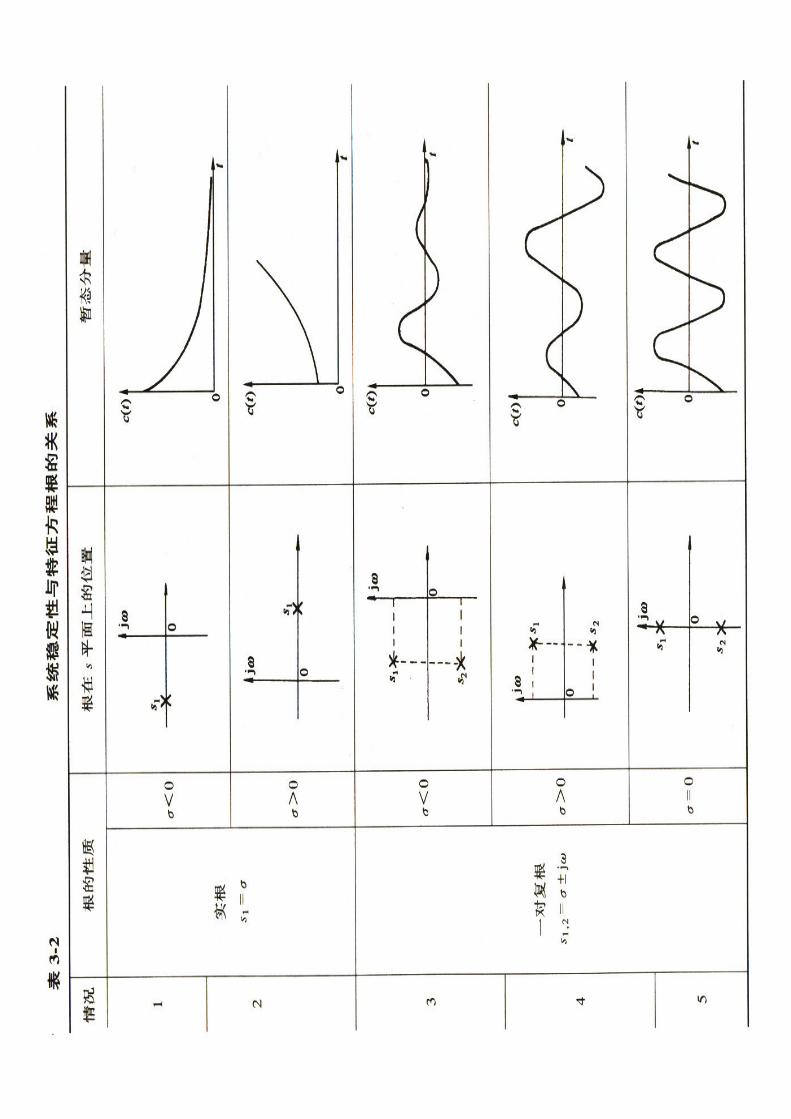
3.5 系统的稳定性分析系统的稳定性分析系统的稳定性分析系统的稳定性分析
一一一一、、、、稳定的概念和定义稳定的概念和定义稳定的概念和定义稳定的概念和定义
任何系统在扰动作用下都会偏离原平衡状态任何系统在扰动作用下都会偏离原平衡状态任何系统在扰动作用下都会偏离原平衡状态任何系统在扰动作用下都会偏离原平衡状态
产生初始偏差产生初始偏差产生初始偏差产生初始偏差。。。。稳定性稳定性稳定性稳定性是指扰动消失后是指扰动消失后是指扰动消失后是指扰动消失后 系统由初系统由初系统由初系统由初
始偏差状态恢复到原平衡状态的能力始偏差状态恢复到原平衡状态的能力始偏差状态恢复到原平衡状态的能力始偏差状态恢复到原平衡状态的能力。。。。若系统恢复若系统恢复若系统恢复若系统恢复
平衡状态平衡状态平衡状态平衡状态 则称系统是稳定的则称系统是稳定的则称系统是稳定的则称系统是稳定的 否则不稳定否则不稳定否则不稳定否则不稳定。。。。
线形系统是否稳定线形系统是否稳定线形系统是否稳定线形系统是否稳定 是系统本身固有的特是系统本身固有的特是系统本身固有的特是系统本身固有的特
它仅仅取决于系统的结构参数它仅仅取决于系统的结构参数它仅仅取决于系统的结构参数它仅仅取决于系统的结构参数 而与初始条件和输而与初始条件和输而与初始条件和输而与初始条件和输
入信号无关入信号无关入信号无关入信号无关。。。。
线 系统的稳定 取决于扰动取消后暂态分量的线 系统的稳定 取决于扰动取消后暂态分量的线 系统的稳定 取决于扰动取消后暂态分量的线 系统的稳定 取决于扰动取消后暂态分量的
衰减与否衰减与否衰减与否衰减与否 决定于系统闭环传递函数的极点决定于系统闭环传递函数的极点决定于系统闭环传递函数的极点决定于系统闭环传递函数的极点 系统系统系统系统
的特征根的特征根的特征根的特征根 在在在在ssss平面的分布平面的分布平面的分布平面的分布
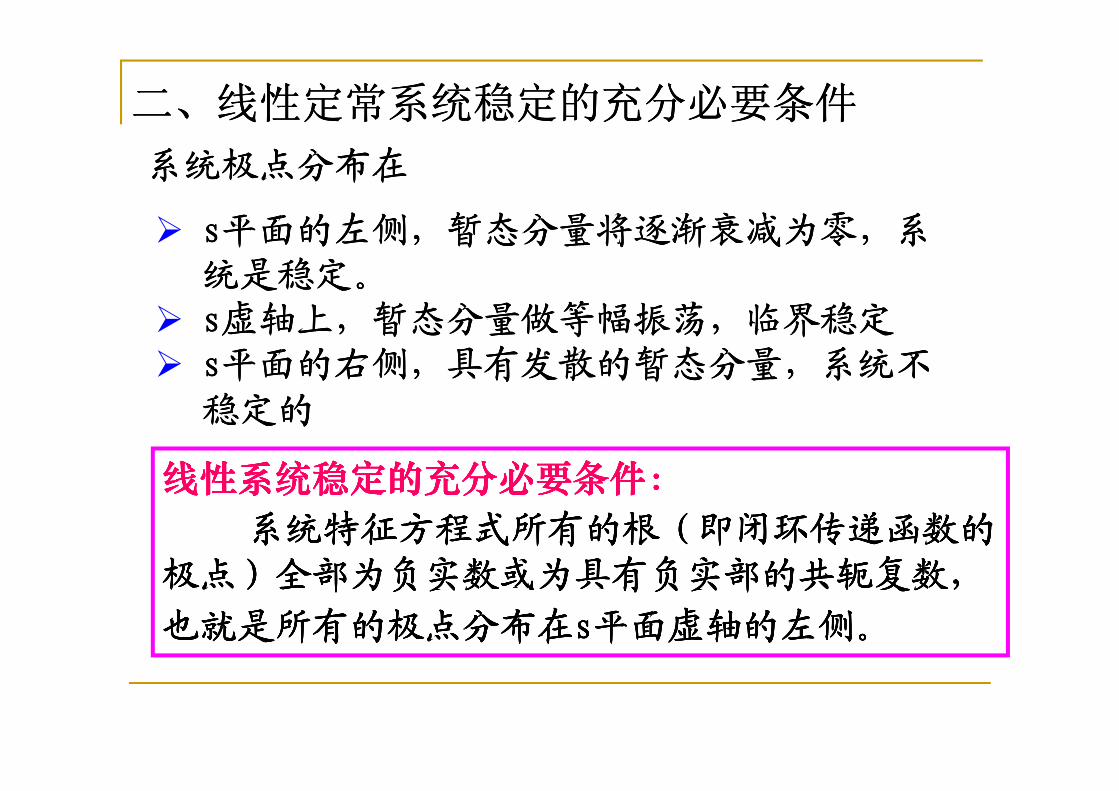
二二二二 线性定常系统稳定的充分必要条件线性定常系统稳定的充分必要条件线性定常系统稳定的充分必要条件线性定常系统稳定的充分必要条件
� ssss平面的左侧平面的左侧平面的左侧平面的左侧 暂态分量将逐渐衰减为零暂态分量将逐渐衰减为零暂态分量将逐渐衰减为零暂态分量将逐渐衰减为零 系系系系
统是稳定统是稳定统是稳定统是稳定。。。。
� ssss虚轴上虚轴上虚轴上虚轴上 暂态分量做等幅振荡暂态分量做等幅振荡暂态分量做等幅振荡暂态分量做等幅振荡 临界稳定临界稳定临界稳定临界稳定
� ssss平面的右侧平面的右侧平面的右侧平面的右侧 具有发散的暂态分量具有发散的暂态分量具有发散的暂态分量具有发散的暂态分量 系统不系统不系统不系统不
稳定的稳定的稳定的稳定的
系统极点分布在系统极点分布在系统极点分布在系统极点分布在
线性系统稳定的充分必要条件线性系统稳定的充分必要条件线性系统稳定的充分必要条件线性系统稳定的充分必要条件::::线性系统稳定的充分必要条件线性系统稳定的充分必要条件线性系统稳定的充分必要条件线性系统稳定的充分必要条件::::系统特征方程式所有的根系统特征方程式所有的根系统特征方程式所有的根系统特征方程式所有的根 即闭环传递函数的即闭环传递函数的即闭环传递函数的即闭环传递函数的系统特征方程式所有的根系统特征方程式所有的根系统特征方程式所有的根系统特征方程式所有的根 即闭环传递函数的即闭环传递函数的即闭环传递函数的即闭环传递函数的
极点极点极点极点 全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数极点极点极点极点 全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数
也就是所有的极点分布在也就是所有的极点分布在也就是所有的极点分布在也就是所有的极点分布在也就是所有的极点分布在也就是所有的极点分布在也就是所有的极点分布在也就是所有的极点分布在ssssssss平面虚轴的左侧平面虚轴的左侧平面虚轴的左侧平面虚轴的左侧。。。。平面虚轴的左侧平面虚轴的左侧平面虚轴的左侧平面虚轴的左侧。。。。
稳定的稳定的稳定的稳定的
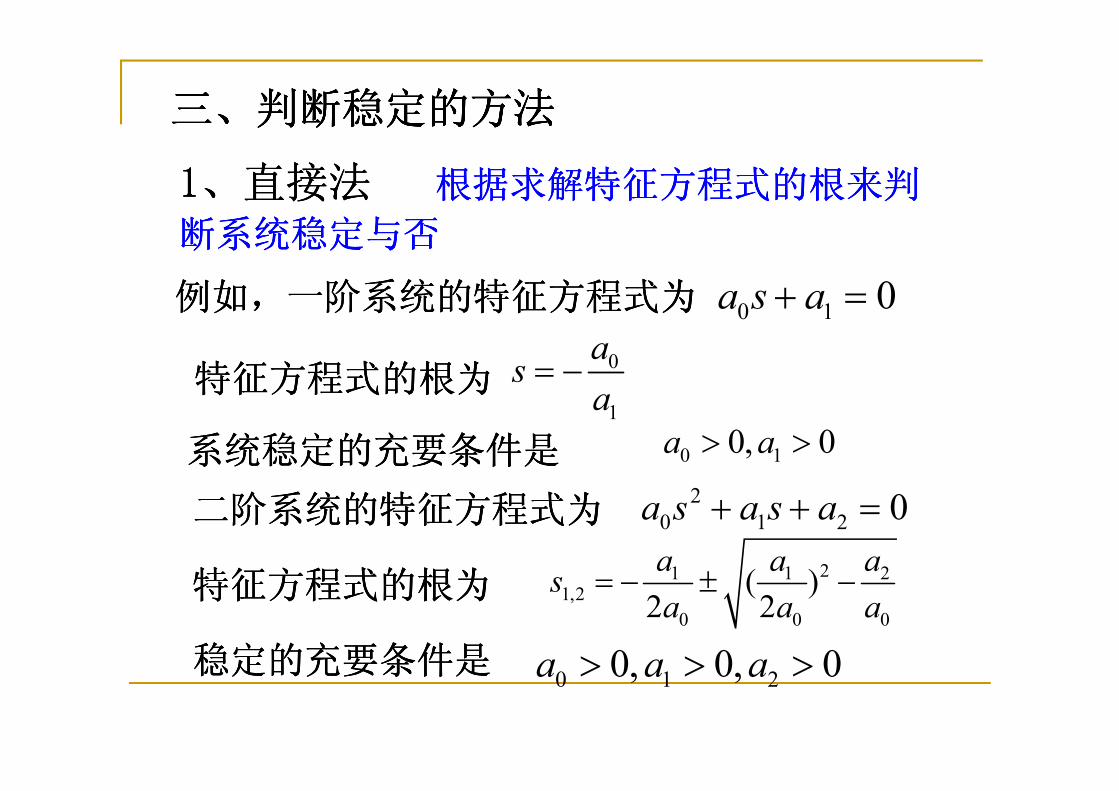
1111 直接法直接法直接法直接法 根据求解特征方程式的根来判根据求解特征方程式的根来判根据求解特征方程式的根来判根据求解特征方程式的根来判
断系统稳定 否断系统稳定 否断系统稳定 否断系统稳定 否
判断稳定的方法判断稳定的方法判断稳定的方法判断稳定的方法判断稳定的方法判断稳定的方法判断稳定的方法判断稳定的方法
例如例如例如例如,,,,一阶系统的特征方程式为一阶系统的特征方程式为一阶系统的特征方程式为一阶系统的特征方程式为 0 1 0a s a+ =
0as
a= −
特征方程式的根为特征方程式的根为特征方程式的根为特征方程式的根为
1a
0 10, 0a a> >系统稳定的充要条件是系统稳定的充要条件是系统稳定的充要条件是系统稳定的充要条件是
特征方程式的根为特征方程式的根为特征方程式的根为特征方程式的根为
2
0 1 2 0a s a s a+ + =
21 1 21,2
0 0 0
( )2 2
a a as
a a a= − ± −
0 1 20, 0, 0a a a> > >
二阶系统的特征方程式为二阶系统的特征方程式为二阶系统的特征方程式为二阶系统的特征方程式为
特征方程式的根为特征方程式的根为特征方程式的根为特征方程式的根为
稳定的充要条件是稳定的充要条件是稳定的充要条件是稳定的充要条件是
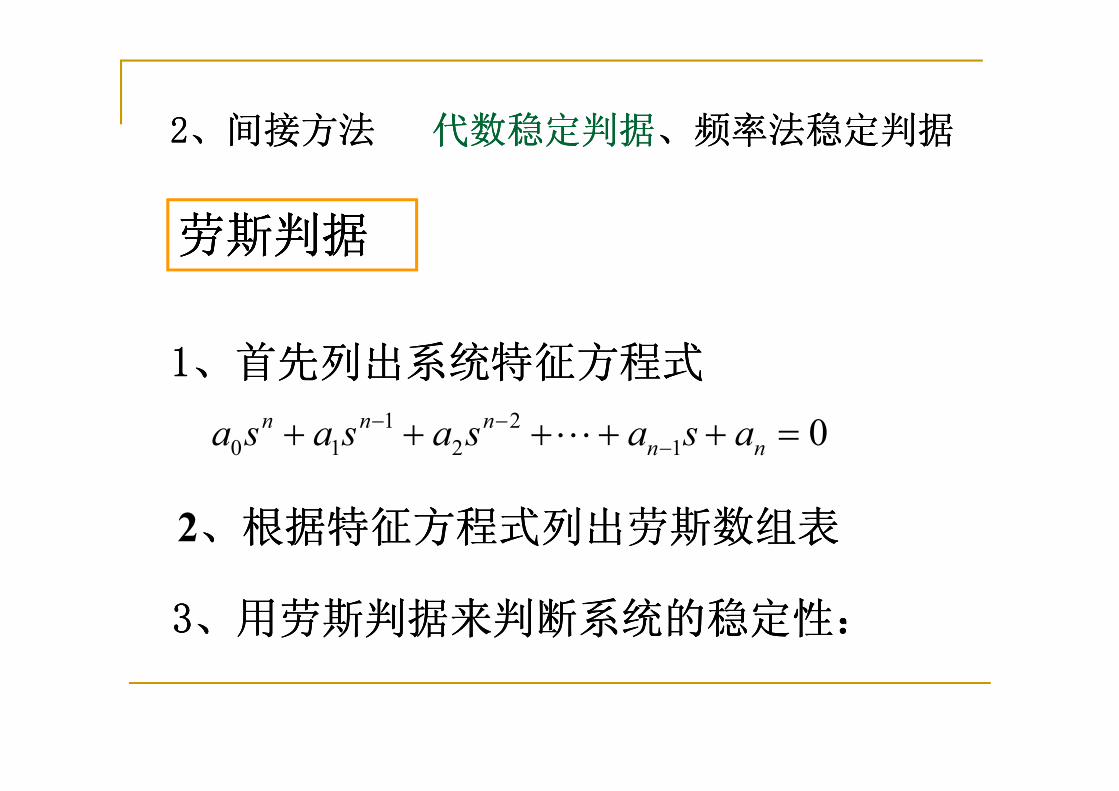
2222 间接方法间接方法间接方法间接方法 数稳定判据数稳定判据数稳定判据数稳定判据 频率法稳定判据频率法稳定判据频率法稳定判据频率法稳定判据
劳 判据劳 判据劳 判据劳 判据劳 判据劳 判据劳 判据劳 判据
1111 首先列出系统特征方程式首先列出系统特征方程式首先列出系统特征方程式首先列出系统特征方程式
1 2
0 1 2 1 0n n n
n na s a s a s a s a− −−+ + + ⋅⋅⋅ + + = 0 0a >
2 根据特征方程式列出劳 数组表根据特征方程式列出劳 数组表根据特征方程式列出劳 数组表根据特征方程式列出劳 数组表
3333 用劳 判据来判断系统的稳定性用劳 判据来判断系统的稳定性用劳 判据来判断系统的稳定性用劳 判据来判断系统的稳定性
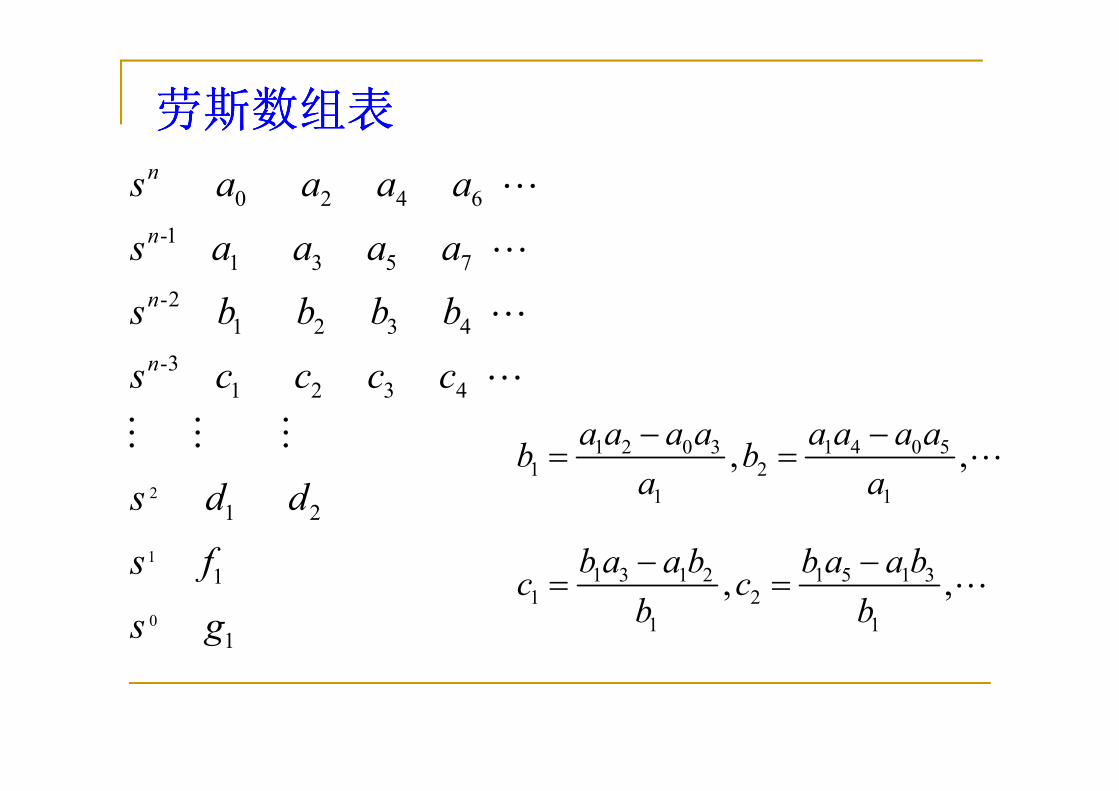
0 2 4 6
-1
1 3 5 7
-2
1 2 3 4
-3
1 2 3 4
n
n
n
n
s a a a a
s a a a a
s b b b b
s c c c c
L
L
L
L
劳 数组表劳 数组表劳 数组表劳 数组表
2
1
0
1 2 3 4
1 2
1
1
s c c c c
s d d
s f
s g
L
M M M 1 2 0 3 1 4 0 51 2
1 1
, ,a a a a a a a a
b ba a
− −= = L
1 3 1 2 1 5 1 31 2
1 1
, ,b a a b b a a b
c cb b
− −= = L
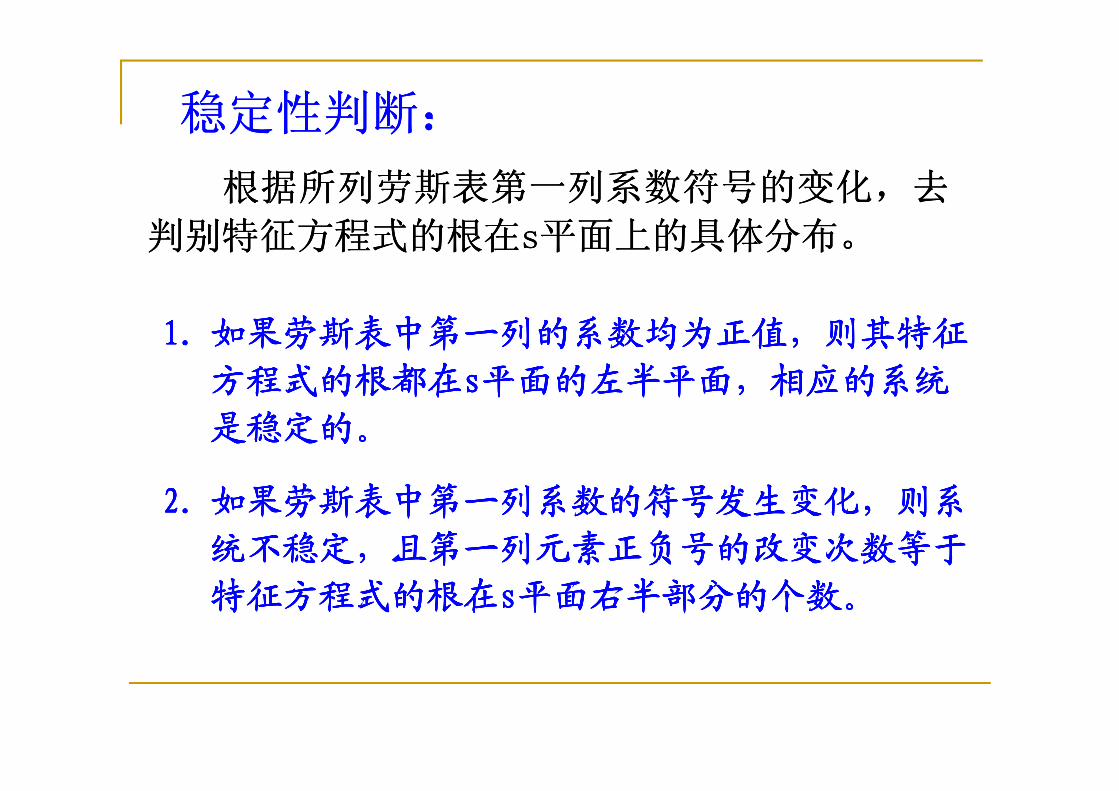
1.1.1.1.1.1.1.1. 如果劳斯表中第一列的系数均为正值如果劳斯表中第一列的系数均为正值如果劳斯表中第一列的系数均为正值如果劳斯表中第一列的系数均为正值 则其特征则其特征则其特征则其特征如果劳斯表中第一列的系数均为正值如果劳斯表中第一列的系数均为正值如果劳斯表中第一列的系数均为正值如果劳斯表中第一列的系数均为正值 则其特征则其特征则其特征则其特征
方程式的根都在方程式的根都在方程式的根都在方程式的根都在方程式的根都在方程式的根都在方程式的根都在方程式的根都在ssssssss平面的左半平面平面的左半平面平面的左半平面平面的左半平面 相应的系统相应的系统相应的系统相应的系统平面的左半平面平面的左半平面平面的左半平面平面的左半平面 相应的系统相应的系统相应的系统相应的系统
稳定性判断稳定性判断稳定性判断稳定性判断
根据所列劳 表第一列系数符号的变化根据所列劳 表第一列系数符号的变化根据所列劳 表第一列系数符号的变化根据所列劳 表第一列系数符号的变化,,,,去去去去
判 特征方程式的根在判 特征方程式的根在判 特征方程式的根在判 特征方程式的根在ssss平面 的 体分布平面 的 体分布平面 的 体分布平面 的 体分布
方程式的根都在方程式的根都在方程式的根都在方程式的根都在方程式的根都在方程式的根都在方程式的根都在方程式的根都在ssssssss平面的左半平面平面的左半平面平面的左半平面平面的左半平面 相应的系统相应的系统相应的系统相应的系统平面的左半平面平面的左半平面平面的左半平面平面的左半平面 相应的系统相应的系统相应的系统相应的系统
是稳定的是稳定的是稳定的是稳定的。。。。是稳定的是稳定的是稳定的是稳定的。。。。
2.2.2.2.2.2.2.2. 如果劳斯表中第一列系数的符号发生变化如果劳斯表中第一列系数的符号发生变化如果劳斯表中第一列系数的符号发生变化如果劳斯表中第一列系数的符号发生变化 则系则系则系则系如果劳斯表中第一列系数的符号发生变化如果劳斯表中第一列系数的符号发生变化如果劳斯表中第一列系数的符号发生变化如果劳斯表中第一列系数的符号发生变化 则系则系则系则系
统不稳定统不稳定统不稳定统不稳定 且第一列元素正负号的改变次数等于且第一列元素正负号的改变次数等于且第一列元素正负号的改变次数等于且第一列元素正负号的改变次数等于统不稳定统不稳定统不稳定统不稳定 且第一列元素正负号的改变次数等于且第一列元素正负号的改变次数等于且第一列元素正负号的改变次数等于且第一列元素正负号的改变次数等于
特征方程式的根在特征方程式的根在特征方程式的根在特征方程式的根在特征方程式的根在特征方程式的根在特征方程式的根在特征方程式的根在ssssssss平面右半部分的个数平面右半部分的个数平面右半部分的个数平面右半部分的个数。。。。平面右半部分的个数平面右半部分的个数平面右半部分的个数平面右半部分的个数。。。。
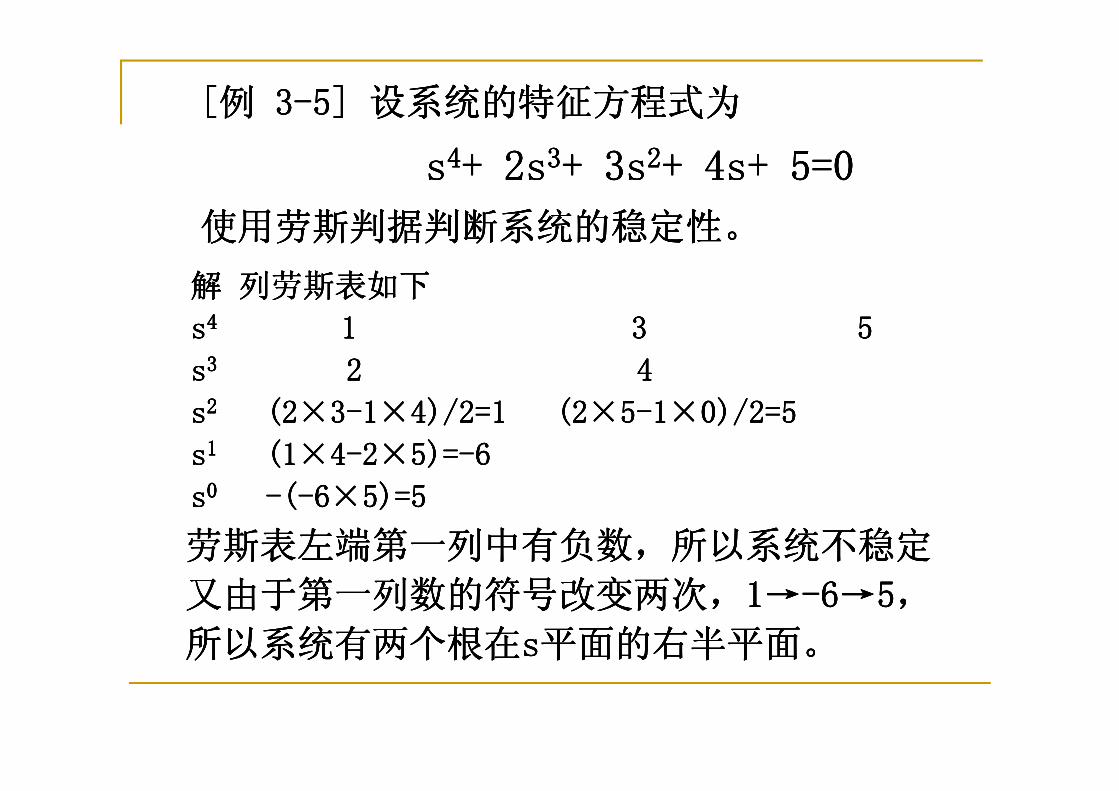
解解解解解解解解 列劳 表如列劳 表如列劳 表如列劳 表如列劳 表如列劳 表如列劳 表如列劳 表如
ssssssss44444444
11111111 33333333 55555555
ssssssss33333333
22222222 44444444
ssssssss22222222
((((((((22222222××××××××33333333--------11111111××××××××44444444)/)/)/)/)/)/)/)/22222222========11111111 ((((((((22222222××××××××55555555--------11111111××××××××00000000)/)/)/)/)/)/)/)/22222222========55555555
[[[[[[[[例例例例例例例例 33333333--------5] 5] 5] 5] 5] 5] 5] 5] 设系统的特征方程式为设系统的特征方程式为设系统的特征方程式为设系统的特征方程式为设系统的特征方程式为设系统的特征方程式为设系统的特征方程式为设系统的特征方程式为
ssssssss44444444
+ 2s+ 2s+ 2s+ 2s+ 2s+ 2s+ 2s+ 2s33333333
+ 3s+ 3s+ 3s+ 3s+ 3s+ 3s+ 3s+ 3s22222222
+ 4s+ 5=0+ 4s+ 5=0+ 4s+ 5=0+ 4s+ 5=0+ 4s+ 5=0+ 4s+ 5=0+ 4s+ 5=0+ 4s+ 5=0
使用劳 判据判断系统的稳定性使用劳 判据判断系统的稳定性使用劳 判据判断系统的稳定性使用劳 判据判断系统的稳定性使用劳 判据判断系统的稳定性使用劳 判据判断系统的稳定性使用劳 判据判断系统的稳定性使用劳 判据判断系统的稳定性
ssssssss22222222
((((((((22222222××××××××33333333--------11111111××××××××44444444)/)/)/)/)/)/)/)/22222222========11111111 ((((((((22222222××××××××55555555--------11111111××××××××00000000)/)/)/)/)/)/)/)/22222222========55555555
ssssssss11111111
((((((((11111111××××××××44444444--------22222222××××××××55555555)=)=)=)=)=)=)=)=--------66666666
ssssssss00000000
--------((((((((--------66666666××××××××55555555)=)=)=)=)=)=)=)=55555555
劳 表左端第一列中有负数劳 表左端第一列中有负数劳 表左端第一列中有负数劳 表左端第一列中有负数,,,,所 系统 稳定所 系统 稳定所 系统 稳定所 系统 稳定劳 表左端第一列中有负数劳 表左端第一列中有负数劳 表左端第一列中有负数劳 表左端第一列中有负数,,,,所 系统 稳定所 系统 稳定所 系统 稳定所 系统 稳定
又由于第一列数的符号改变两又由于第一列数的符号改变两又由于第一列数的符号改变两又由于第一列数的符号改变两 ,,,,又由于第一列数的符号改变两又由于第一列数的符号改变两又由于第一列数的符号改变两又由于第一列数的符号改变两 ,,,,1→1→1→1→1→1→1→1→--------6→56→56→56→56→56→56→56→5,,,,,,,,
所 系统有两个根在所 系统有两个根在所 系统有两个根在所 系统有两个根在所 系统有两个根在所 系统有两个根在所 系统有两个根在所 系统有两个根在ssssssss平面的右半平面平面的右半平面平面的右半平面平面的右半平面平面的右半平面平面的右半平面平面的右半平面平面的右半平面
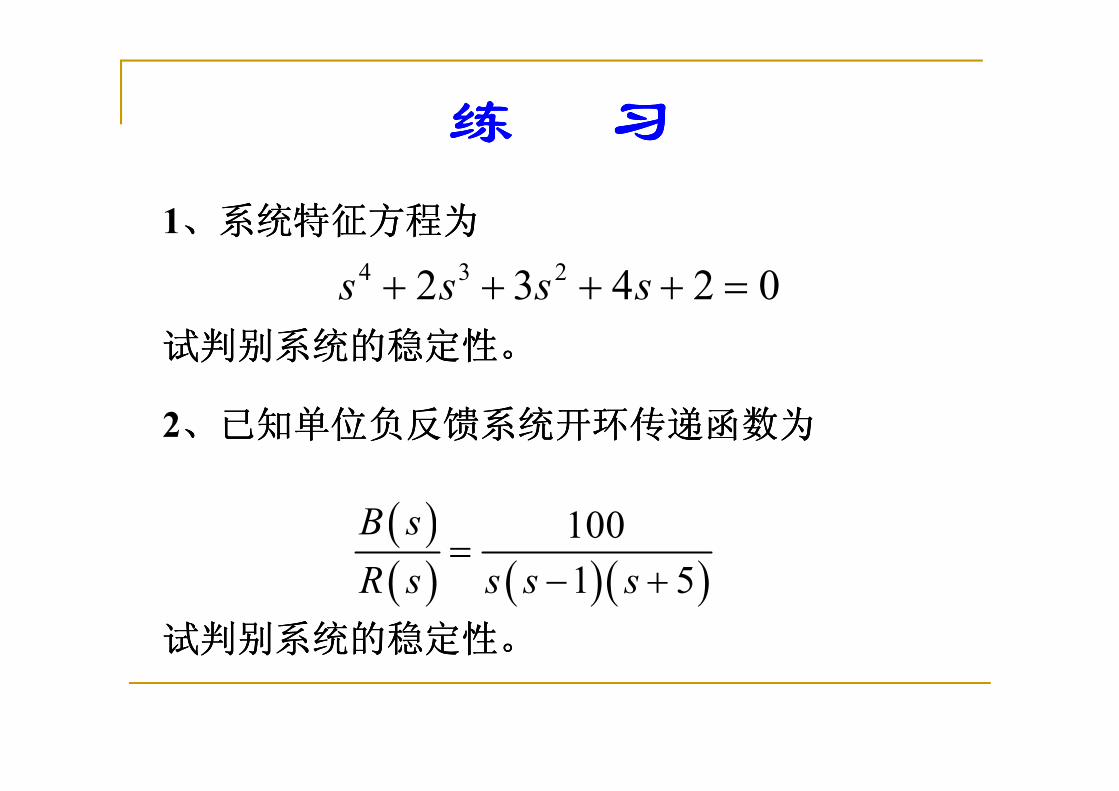
1 系统特征方程为系统特征方程为系统特征方程为系统特征方程为
试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性
练练练练 习习习习
4 3 22 3 4 2 0s s s s+ + + + =
2 已知单位负反馈系统开 传递函数为已知单位负反馈系统开 传递函数为已知单位负反馈系统开 传递函数为已知单位负反馈系统开 传递函数为
试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性
( )( ) ( )( )
100
1 5
B s
R s s s s=
− +
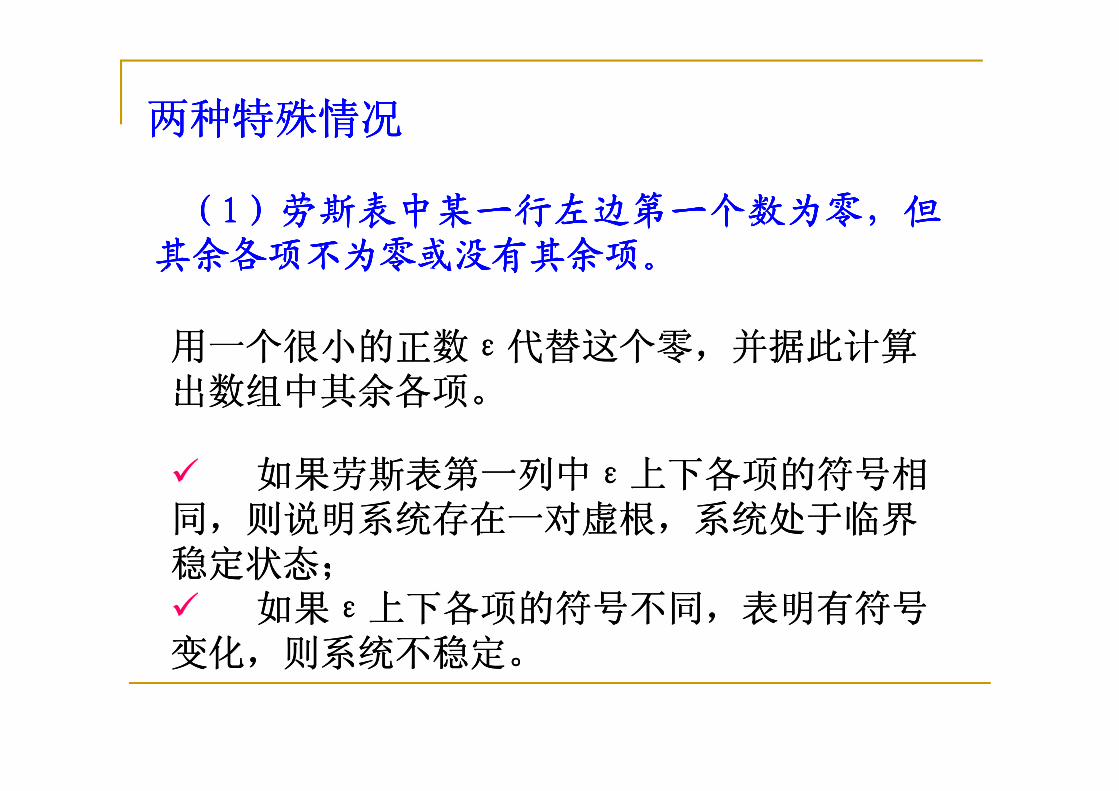
11111111 劳斯表中某一行左边第一个数为零劳斯表中某一行左边第一个数为零劳斯表中某一行左边第一个数为零劳斯表中某一行左边第一个数为零劳斯表中某一行左边第一个数为零劳斯表中某一行左边第一个数为零劳斯表中某一行左边第一个数为零劳斯表中某一行左边第一个数为零 但但但但但但但但
其余各项不为零或没有其余项其余各项不为零或没有其余项其余各项不为零或没有其余项其余各项不为零或没有其余项其余各项不为零或没有其余项其余各项不为零或没有其余项其余各项不为零或没有其余项其余各项不为零或没有其余项。。。。。。。。
两种特殊情况两种特殊情况两种特殊情况两种特殊情况两种特殊情况两种特殊情况两种特殊情况两种特殊情况
用一个很小的 数用一个很小的 数用一个很小的 数用一个很小的 数εεεε 替 个零替 个零替 个零替 个零,,,,并据 计算并据 计算并据 计算并据 计算
出数组中 余各项出数组中 余各项出数组中 余各项出数组中 余各项出数组中 余各项出数组中 余各项出数组中 余各项出数组中 余各项
� 如果劳 表第一列中如果劳 表第一列中如果劳 表第一列中如果劳 表第一列中εεεε 各项的符号相各项的符号相各项的符号相各项的符号相
同同同同,,,,则说明系统存在一对虚根则说明系统存在一对虚根则说明系统存在一对虚根则说明系统存在一对虚根,,,,系统处于临界系统处于临界系统处于临界系统处于临界
稳定状态稳定状态稳定状态稳定状态
� 如果如果如果如果εεεε 各项的符号 同各项的符号 同各项的符号 同各项的符号 同,,,,表明有符号表明有符号表明有符号表明有符号
变化变化变化变化,,,,则系统 稳定则系统 稳定则系统 稳定则系统 稳定
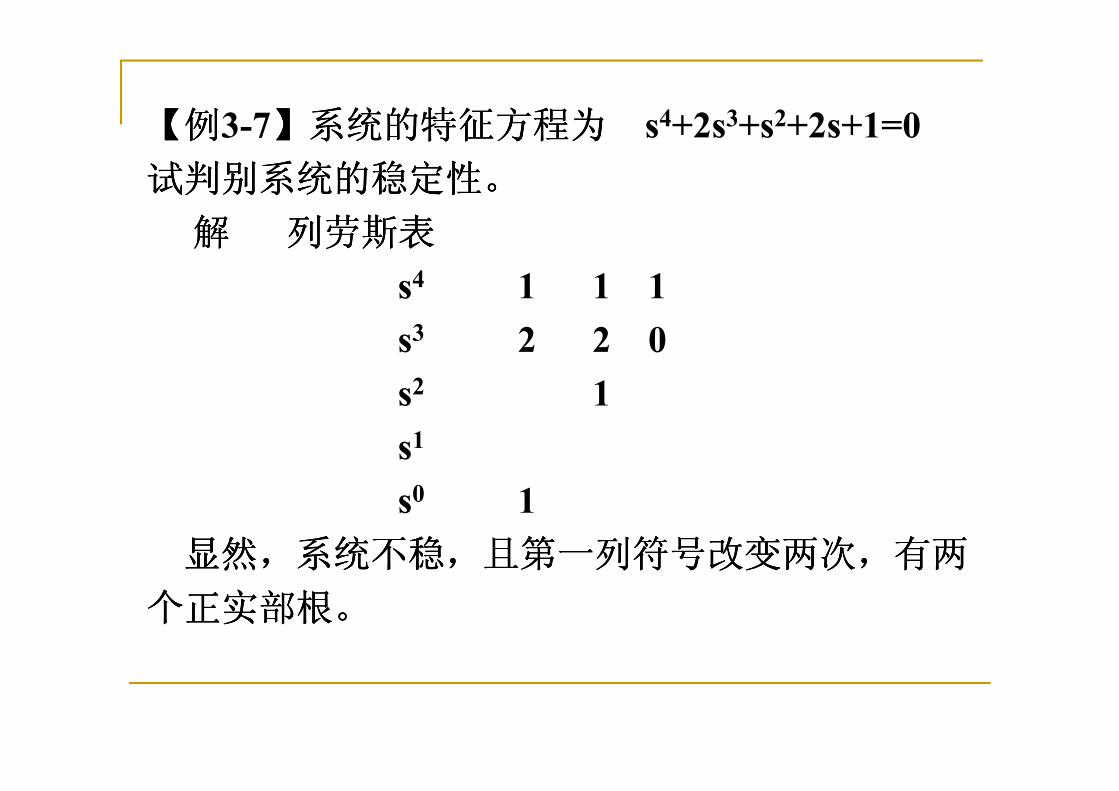
例例例例3-7 系统的特征方程为系统的特征方程为系统的特征方程为系统的特征方程为 s4+2s3+s2+2s+1=0
试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性
解解解解 列劳 表列劳 表列劳 表列劳 表
s4 1 1 1
s3 2 2 0
s2 1εs2 1
s1
s0 1
显然显然显然显然,,,,系统 稳系统 稳系统 稳系统 稳,,,,且第一列符号改变两且第一列符号改变两且第一列符号改变两且第一列符号改变两 ,,,,有两有两有两有两
个 实部根个 实部根个 实部根个 实部根
22
ε−
ε
ssss平面中这些大小相等平面中这些大小相等平面中这些大小相等平面中这些大小相等 径向相反的根可径向相反的根可径向相反的根可径向相反的根可
以通过辅助方程式得到以通过辅助方程式得到以通过辅助方程式得到以通过辅助方程式得到 而且这些根的个数而且这些根的个数而且这些根的个数而且这些根的个数
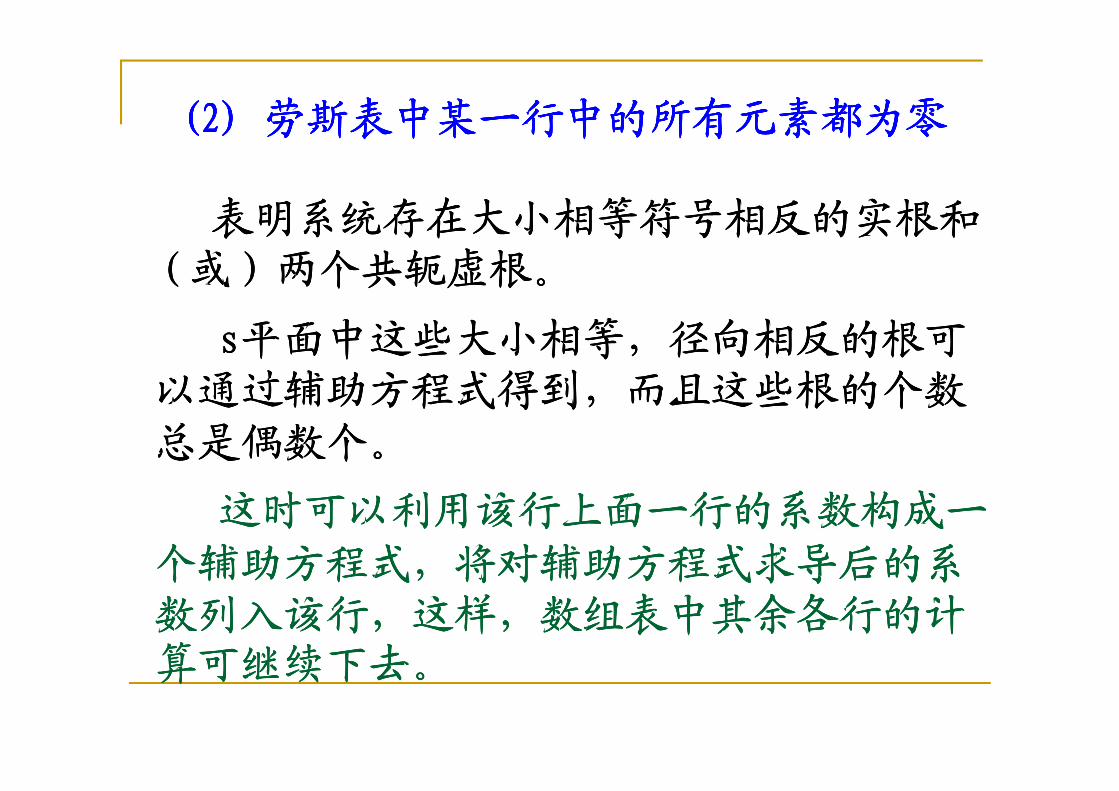
(2) (2) (2) (2) (2) (2) (2) (2) 劳斯表中某一行中的所有元素都为零劳斯表中某一行中的所有元素都为零劳斯表中某一行中的所有元素都为零劳斯表中某一行中的所有元素都为零劳斯表中某一行中的所有元素都为零劳斯表中某一行中的所有元素都为零劳斯表中某一行中的所有元素都为零劳斯表中某一行中的所有元素都为零
表明系统存在大小相等符号相反的实根和表明系统存在大小相等符号相反的实根和表明系统存在大小相等符号相反的实根和表明系统存在大小相等符号相反的实根和
或或或或 两个共轭虚根两个共轭虚根两个共轭虚根两个共轭虚根。。。。
以通过辅助方程式得到以通过辅助方程式得到以通过辅助方程式得到以通过辅助方程式得到 而且这些根的个数而且这些根的个数而且这些根的个数而且这些根的个数
总是偶数个总是偶数个总是偶数个总是偶数个。。。。
这时可以利用该行上面一行的系数构成一这时可以利用该行上面一行的系数构成一这时可以利用该行上面一行的系数构成一这时可以利用该行上面一行的系数构成一
个辅助方程式个辅助方程式个辅助方程式个辅助方程式 将对辅助方程式求导后的系将对辅助方程式求导后的系将对辅助方程式求导后的系将对辅助方程式求导后的系
数列入该行数列入该行数列入该行数列入该行 这样这样这样这样 数组表中其余各行的计数组表中其余各行的计数组表中其余各行的计数组表中其余各行的计
算可继续下去算可继续下去算可继续下去算可继续下去。。。。
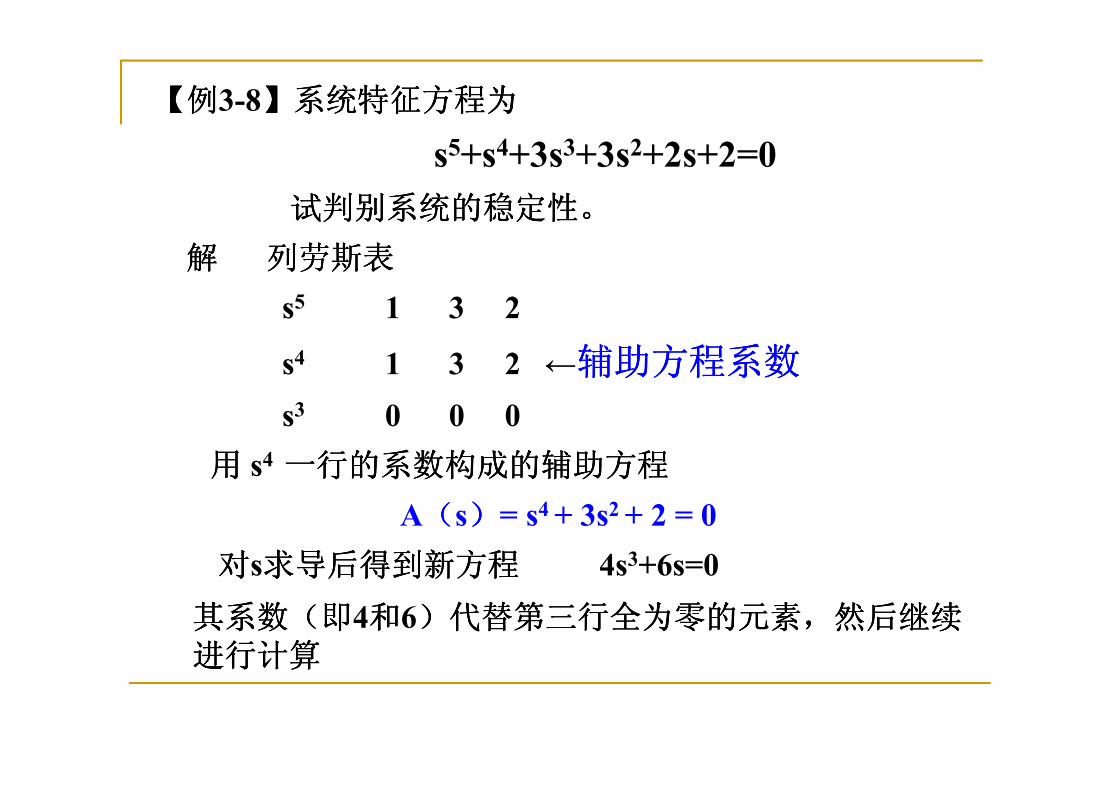
例例例例3-8 系统特征方程为系统特征方程为系统特征方程为系统特征方程为
s5+s4+3s3+3s2+2s+2=0
试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性
解解解解 列劳 表列劳 表列劳 表列劳 表
s5 1 3 2
s4 1 3 2 ←辅 方程系数辅 方程系数辅 方程系数辅 方程系数
s3 0 0 0
用用用用 s4一行的系数构成的辅 方程一行的系数构成的辅 方程一行的系数构成的辅 方程一行的系数构成的辅 方程
A s = s4 + 3s2 + 2 = 0
对对对对s求导后得到 方程求导后得到 方程求导后得到 方程求导后得到 方程 4s3+6s=0
系数系数系数系数 即即即即4和和和和6 替第 行全为零的元素替第 行全为零的元素替第 行全为零的元素替第 行全为零的元素,,,,然后继续然后继续然后继续然后继续
进行计算进行计算进行计算进行计算
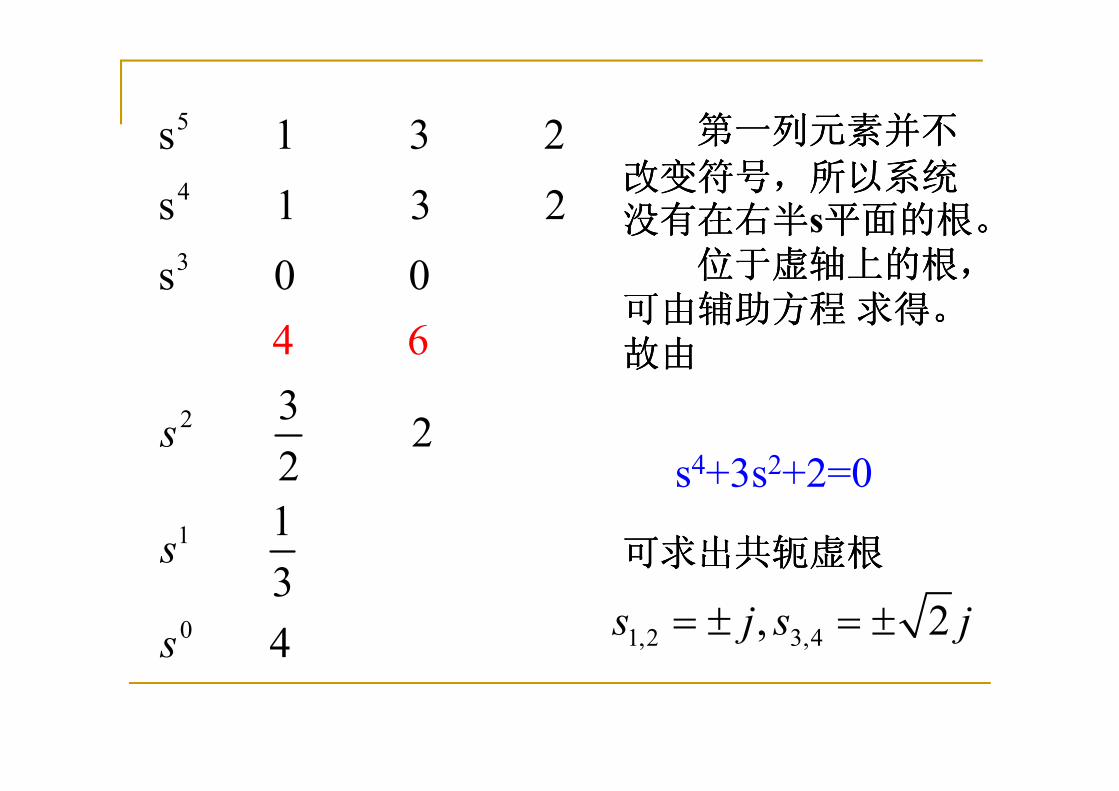
5
4
3
s 1 3 2
s 1 3 2
s 0 0
3
4 6
第一列元素并第一列元素并第一列元素并第一列元素并
改变符号改变符号改变符号改变符号,,,,所 系统所 系统所 系统所 系统
没有在右半没有在右半没有在右半没有在右半s平面的根平面的根平面的根平面的根
位于虚轴 的根位于虚轴 的根位于虚轴 的根位于虚轴 的根,,,,
可由辅 方程可由辅 方程可由辅 方程可由辅 方程 求得求得求得求得
故由故由故由故由
2
1
0
3 2
2
1
3
4
s
s
s 1,2 3,4, 2s j s j= ± = ±
s4+3s2+2=0
可求出共轭虚根可求出共轭虚根可求出共轭虚根可求出共轭虚根
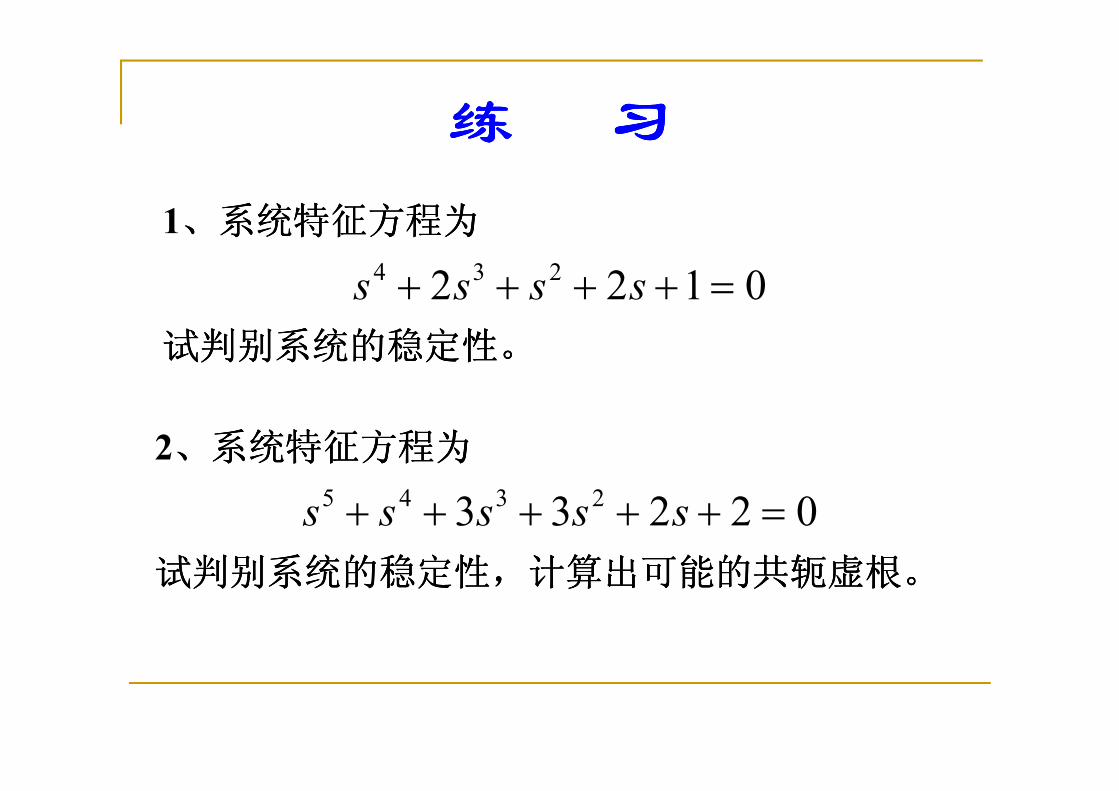
1 系统特征方程为系统特征方程为系统特征方程为系统特征方程为
试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性
练练练练 习习习习
4 3 22 2 1 0s s s s+ + + + =
2 系统特征方程为系统特征方程为系统特征方程为系统特征方程为
试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性试判 系统的稳定性,,,,计算出可能的共轭虚根计算出可能的共轭虚根计算出可能的共轭虚根计算出可能的共轭虚根
5 4 3 23 3 2 2 0s s s s s+ + + + + =
1 3
2
0 2
1 57
2 3
a aD
a a= = = −
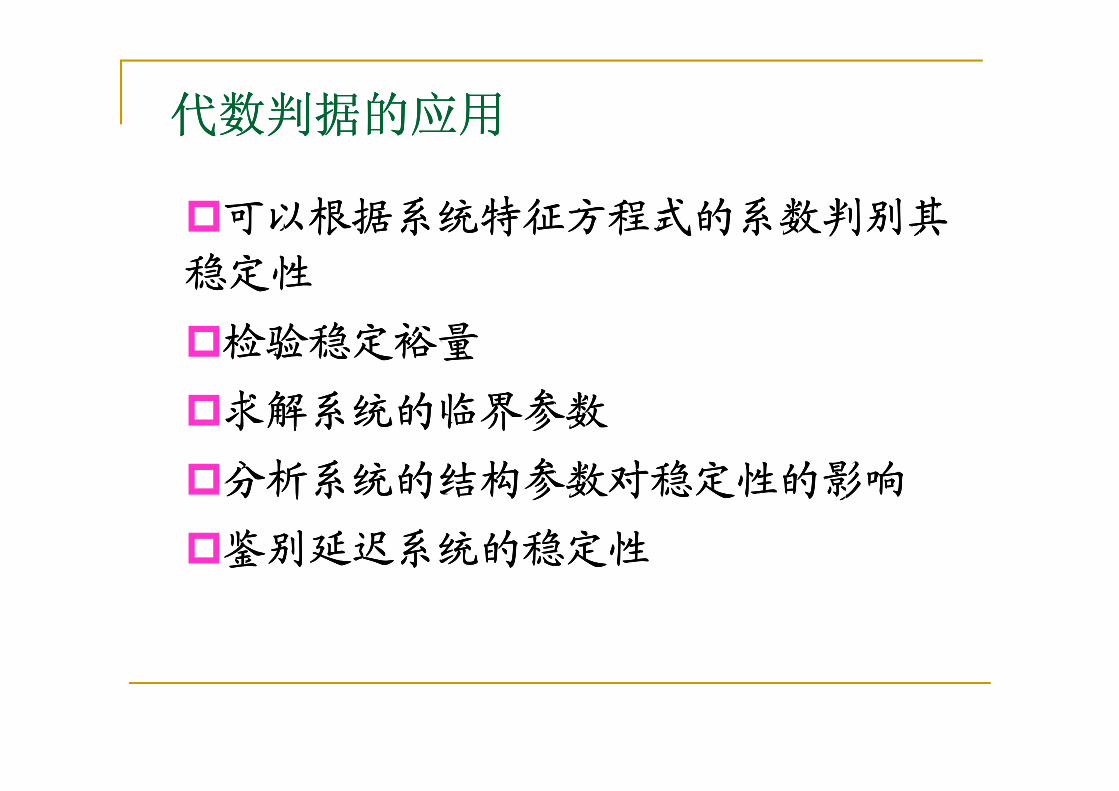
�可以根据系统特征方程式的系数判别其可以根据系统特征方程式的系数判别其可以根据系统特征方程式的系数判别其可以根据系统特征方程式的系数判别其
稳定稳定稳定稳定
�检验稳定裕量检验稳定裕量检验稳定裕量检验稳定裕量
�求解系统的临界参数求解系统的临界参数求解系统的临界参数求解系统的临界参数
数判据的应用数判据的应用数判据的应用数判据的应用
�求解系统的临界参数求解系统的临界参数求解系统的临界参数求解系统的临界参数
�分析系统的结构参数对稳定 的影响分析系统的结构参数对稳定 的影响分析系统的结构参数对稳定 的影响分析系统的结构参数对稳定 的影响
�鉴别延迟系统的稳定鉴别延迟系统的稳定鉴别延迟系统的稳定鉴别延迟系统的稳定
1.1.利用 数稳定判据可确定系统个 参数变化对稳利用 数稳定判据可确定系统个 参数变化对稳利用 数稳定判据可确定系统个 参数变化对稳利用 数稳定判据可确定系统个 参数变化对稳利用 数稳定判据可确定系统个 参数变化对稳利用 数稳定判据可确定系统个 参数变化对稳利用 数稳定判据可确定系统个 参数变化对稳利用 数稳定判据可确定系统个 参数变化对稳
定性的影响定性的影响定性的影响定性的影响定性的影响定性的影响定性的影响定性的影响
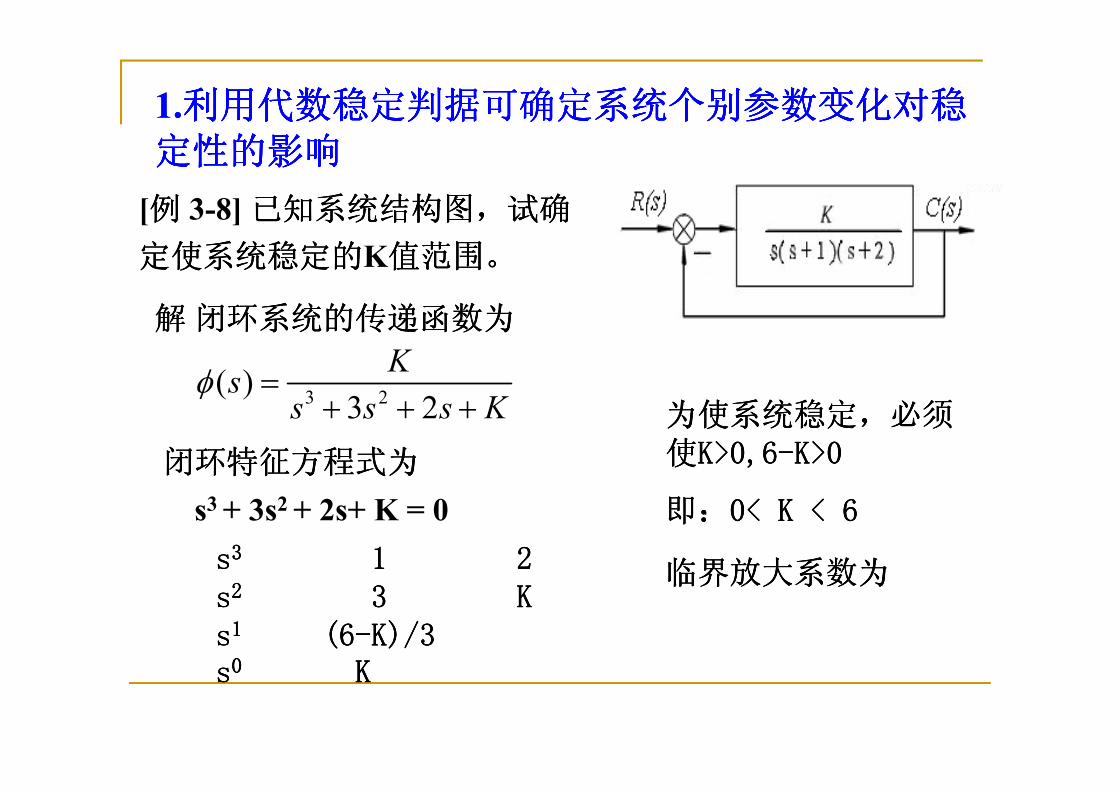
[例例例例 3-8] 已知系统结构图已知系统结构图已知系统结构图已知系统结构图,,,,试确试确试确试确
定使系统稳定的定使系统稳定的定使系统稳定的定使系统稳定的K值范围值范围值范围值范围
解解解解 系统的传递函数为系统的传递函数为系统的传递函数为系统的传递函数为
3 2( )
3 2
Ks
s s s Kφ =
+ + +3 2( )
3 2s
s s s Kφ =
+ + +
ssss3333
1111 2222
ssss2222
3333 KKKK
ssss1111
((((6666----K)/K)/K)/K)/3333
ssss0000
KKKK
临界放大系数为临界放大系数为临界放大系数为临界放大系数为
6lK =
特征方程式为特征方程式为特征方程式为特征方程式为
s3 + 3s2 + 2s+ K = 0
为使系统稳定为使系统稳定为使系统稳定为使系统稳定,,,,必须必须必须必须
使使使使K>0,6K>0,6K>0,6K>0,6----K>0K>0K>0K>0
即即即即 0< K < 60< K < 60< K < 60< K < 6
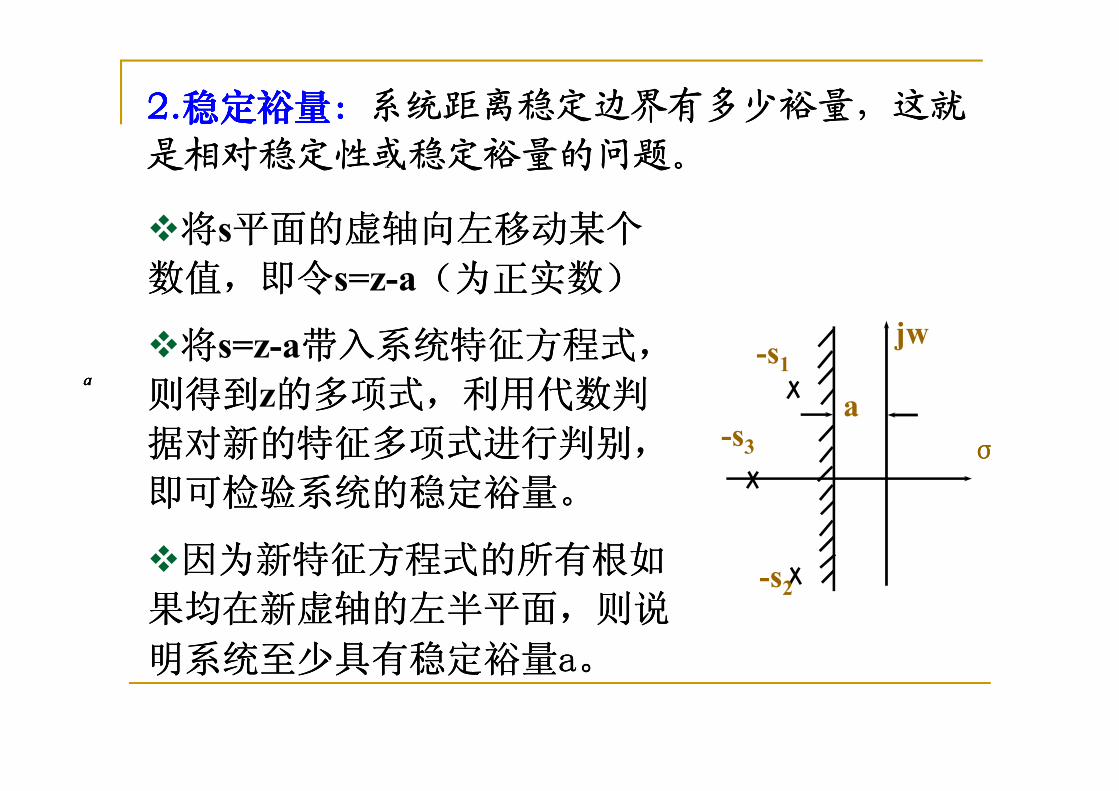
2.2.2.2.2.2.2.2.稳定裕量稳定裕量稳定裕量稳定裕量::::稳定裕量稳定裕量稳定裕量稳定裕量::::系统距离稳定边界有多少裕量系统距离稳定边界有多少裕量系统距离稳定边界有多少裕量系统距离稳定边界有多少裕量 这就这就这就这就
是相对稳定 或稳定裕量的问题是相对稳定 或稳定裕量的问题是相对稳定 或稳定裕量的问题是相对稳定 或稳定裕量的问题。。。。
�将将将将s平面的虚轴向左移 某个平面的虚轴向左移 某个平面的虚轴向左移 某个平面的虚轴向左移 某个
数值数值数值数值,,,,即即即即 s=z-a 为 实数为 实数为 实数为 实数
�将将将将s=z-a带入系统特征方程式带入系统特征方程式带入系统特征方程式带入系统特征方程式,,,,
则得到则得到则得到则得到z的多项式的多项式的多项式的多项式,,,,利用 数判利用 数判利用 数判利用 数判
aaaaa
jw
a
-s1
则得到则得到则得到则得到z的多项式的多项式的多项式的多项式,,,,利用 数判利用 数判利用 数判利用 数判
据对 的特征多项式进行判据对 的特征多项式进行判据对 的特征多项式进行判据对 的特征多项式进行判 ,,,,
即可检验系统的稳定裕量即可检验系统的稳定裕量即可检验系统的稳定裕量即可检验系统的稳定裕量
�因为 特征方程式的所有根如因为 特征方程式的所有根如因为 特征方程式的所有根如因为 特征方程式的所有根如
果均在 虚轴的左半平面果均在 虚轴的左半平面果均在 虚轴的左半平面果均在 虚轴的左半平面,,,,则说则说则说则说
明系统至少 有稳定裕量明系统至少 有稳定裕量明系统至少 有稳定裕量明系统至少 有稳定裕量aaaa
σσσσ
a-s3
-s2
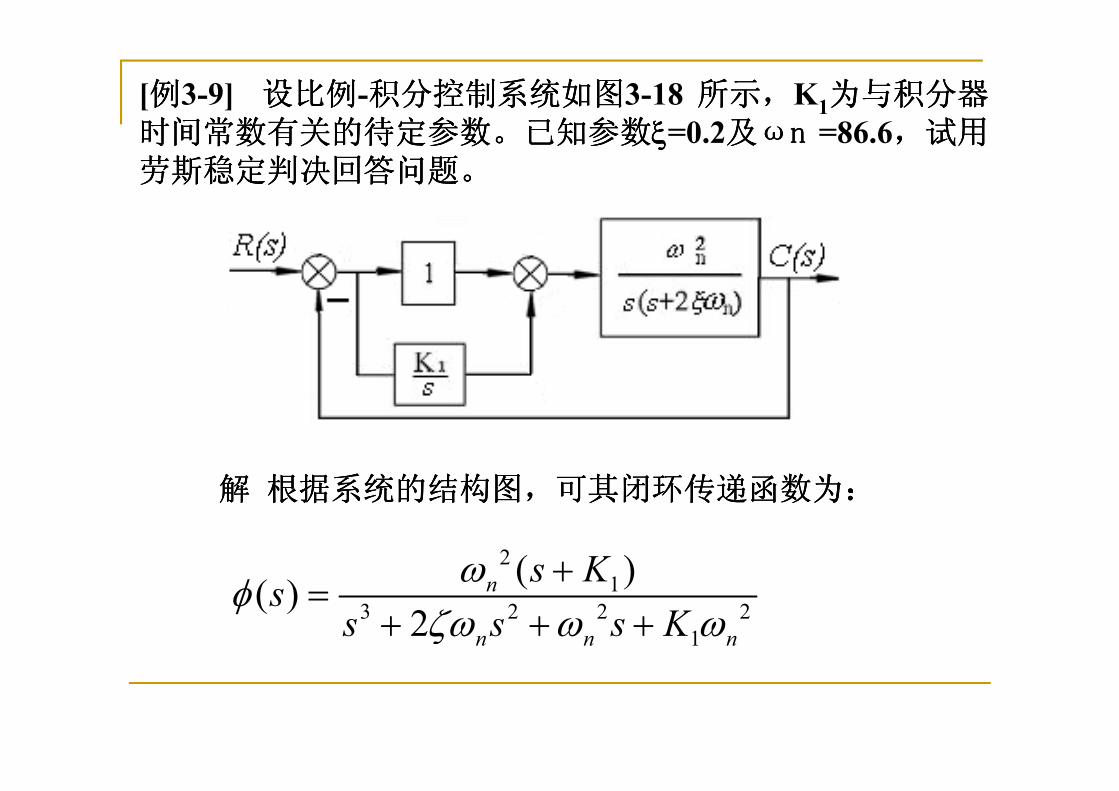
[例例例例3-9] 设比例设比例设比例设比例- 分控制系统如图分控制系统如图分控制系统如图分控制系统如图3-18 所示所示所示所示,,,,K1为 分器为 分器为 分器为 分器
时间常数有关的待定参数时间常数有关的待定参数时间常数有关的待定参数时间常数有关的待定参数 已知参数已知参数已知参数已知参数ξξξξ=0.2及及及及以n以n以n以n =86.6,,,,试用试用试用试用
劳 稳定判 回答 题劳 稳定判 回答 题劳 稳定判 回答 题劳 稳定判 回答 题
解解解解 根据系统的结构图根据系统的结构图根据系统的结构图根据系统的结构图,,,,可 传递函数为可 传递函数为可 传递函数为可 传递函数为
2
1
3 2 2 2
1
( )( )
2
n
n n n
s Ks
s s s K
ωφ
ζω ω ω+
=+ + +
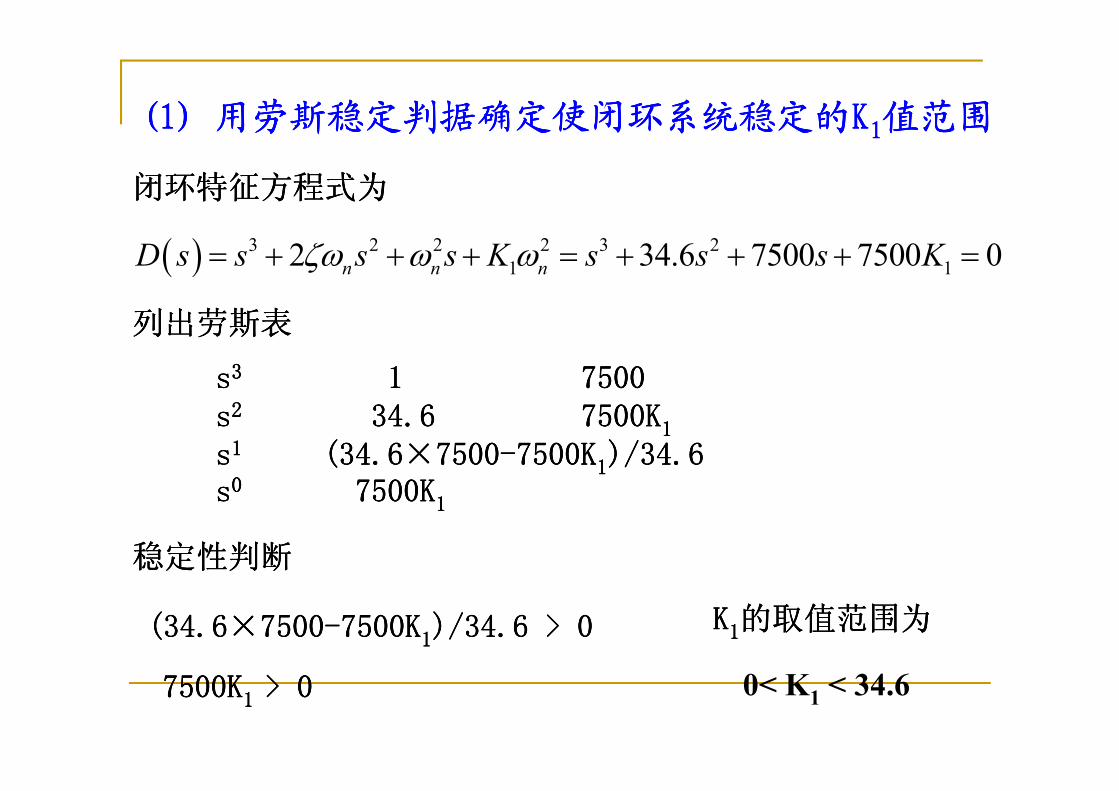
特征方程式为特征方程式为特征方程式为特征方程式为
( ) 3 2 2 2 3 2
1 12 34.6 7500 7500 0n n nD s s s s K s s s Kζω ω ω= + + + = + + + =
ssss3333
1111 7500750075007500
(1) (1) (1) (1) 用劳斯稳定判据确定使闭环系统稳定的用劳斯稳定判据确定使闭环系统稳定的用劳斯稳定判据确定使闭环系统稳定的用劳斯稳定判据确定使闭环系统稳定的KKKK1111
值范围值范围值范围值范围
列出劳 表列出劳 表列出劳 表列出劳 表
ssss2222
34343434....6666 7500750075007500KKKK1111
ssss1111
((((34343434....6666××××7500750075007500----7500750075007500KKKK1111
)/)/)/)/34343434....6666
ssss0000
7500750075007500KKKK1111
KKKK1111
的取值范围为的取值范围为的取值范围为的取值范围为
0< K1 < 34.6
稳定性判断稳定性判断稳定性判断稳定性判断
(34.6(34.6(34.6(34.6××××7500750075007500----7500K7500K7500K7500K1111
)/34.6 > 0)/34.6 > 0)/34.6 > 0)/34.6 > 0
7500K7500K7500K7500K1 1 1 1
> 0> 0> 0> 0
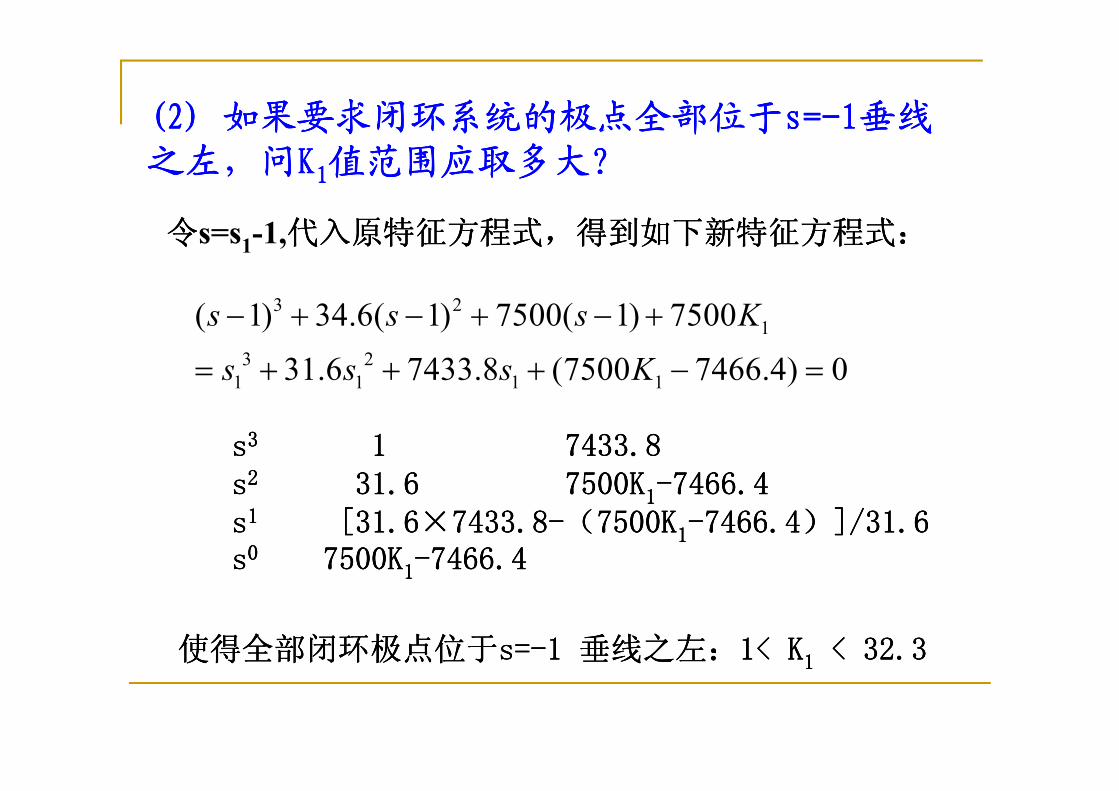
s=s1-1, 入原特征方程式入原特征方程式入原特征方程式入原特征方程式,,,,得到如 特征方程式得到如 特征方程式得到如 特征方程式得到如 特征方程式
3 2
1
3 2
1 1 1 1
( 1) 34.6( 1) 7500( 1) 7500
31.6 7433.8 (7500 7466.4) 0
s s s K
s s s K
− + − + − +
= + + + − =
(2) (2) (2) (2) 如果要求闭环系统的极点全部位于如果要求闭环系统的极点全部位于如果要求闭环系统的极点全部位于如果要求闭环系统的极点全部位于s=s=s=s=))))1111垂线垂线垂线垂线
之左之左之左之左 问问问问KKKK1111
值范围应取多大值范围应取多大值范围应取多大值范围应取多大????
ssss3333
1111 7433743374337433....8888
ssss2222
31313131....6666 7500750075007500KKKK1111
----7466746674667466....4444
ssss1111
[[[[31313131....6666××××7433743374337433....8888---- 7500750075007500KKKK1111
----7466746674667466....4444 ]/]/]/]/31313131....6666
ssss0000
7500750075007500KKKK1111
----7466746674667466....4444
使得全部 极点位于使得全部 极点位于使得全部 极点位于使得全部 极点位于s=s=s=s=----1 1 1 1 垂线之左垂线之左垂线之左垂线之左 1< K1< K1< K1< K1111
< 32.3< 32.3< 32.3< 32.3
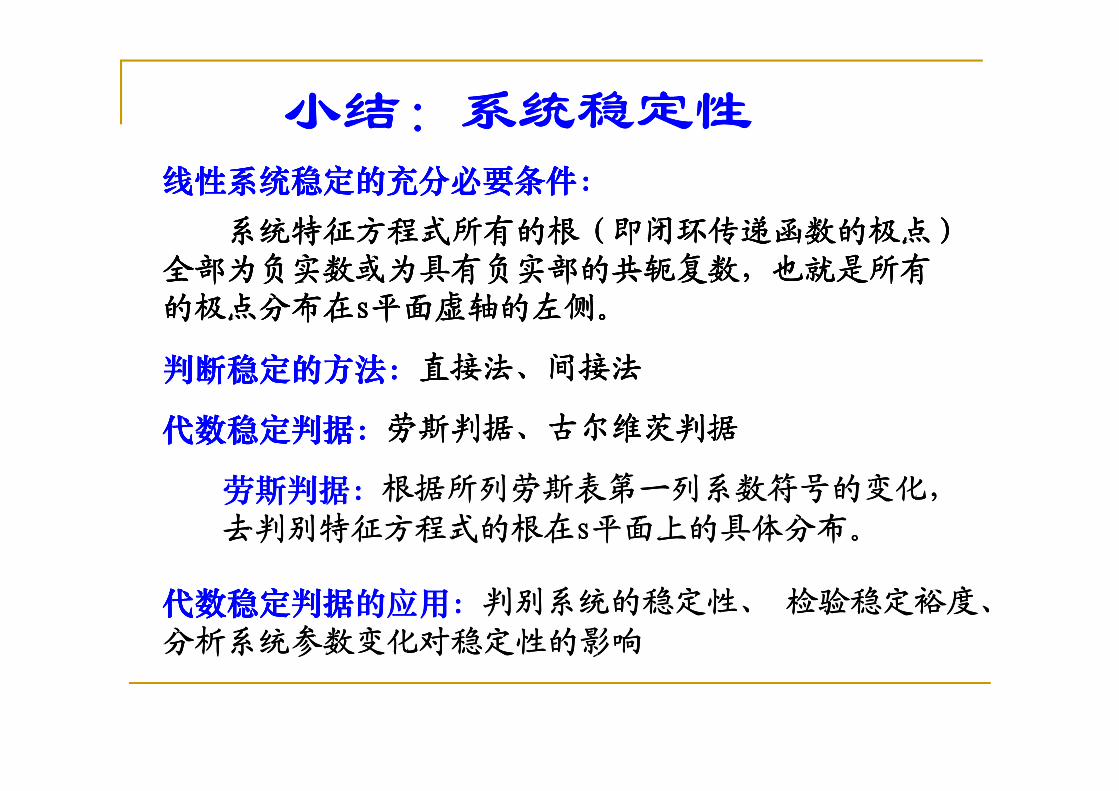
小结小结小结小结::::系统稳定性系统稳定性系统稳定性系统稳定性
线性系统稳定的充分必要条件线性系统稳定的充分必要条件线性系统稳定的充分必要条件线性系统稳定的充分必要条件::::线性系统稳定的充分必要条件线性系统稳定的充分必要条件线性系统稳定的充分必要条件线性系统稳定的充分必要条件::::系统特征方程式所有的根系统特征方程式所有的根系统特征方程式所有的根系统特征方程式所有的根 即闭环传递函数的极点即闭环传递函数的极点即闭环传递函数的极点即闭环传递函数的极点系统特征方程式所有的根系统特征方程式所有的根系统特征方程式所有的根系统特征方程式所有的根 即闭环传递函数的极点即闭环传递函数的极点即闭环传递函数的极点即闭环传递函数的极点
全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数 也就是所有也就是所有也就是所有也就是所有全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数全部为负实数或为具有负实部的共轭复数 也就是所有也就是所有也就是所有也就是所有
的极点分布在的极点分布在的极点分布在的极点分布在的极点分布在的极点分布在的极点分布在的极点分布在ssssssss平面虚轴的左侧平面虚轴的左侧平面虚轴的左侧平面虚轴的左侧。。。。平面虚轴的左侧平面虚轴的左侧平面虚轴的左侧平面虚轴的左侧。。。。
判断稳定的方法判断稳定的方法判断稳定的方法判断稳定的方法::::判断稳定的方法判断稳定的方法判断稳定的方法判断稳定的方法::::直接法直接法直接法直接法、、、、间接法间接法间接法间接法直接法直接法直接法直接法、、、、间接法间接法间接法间接法
劳斯判据劳斯判据劳斯判据劳斯判据::::根据所列劳斯表第一列系数符号的变化根据所列劳斯表第一列系数符号的变化根据所列劳斯表第一列系数符号的变化根据所列劳斯表第一列系数符号的变化
去判别特征方程式的根在去判别特征方程式的根在去判别特征方程式的根在去判别特征方程式的根在ssss平面上的具体分布平面上的具体分布平面上的具体分布平面上的具体分布。。。。
代数稳定判据代数稳定判据代数稳定判据代数稳定判据代数稳定判据代数稳定判据代数稳定判据代数稳定判据的应用的应用的应用的应用::::判别系统的稳定判别系统的稳定判别系统的稳定判别系统的稳定 、、、、 检验稳定裕度检验稳定裕度检验稳定裕度检验稳定裕度、、、、
分析系统参数变化对稳定 的影响分析系统参数变化对稳定 的影响分析系统参数变化对稳定 的影响分析系统参数变化对稳定 的影响
代数稳定判据代数稳定判据代数稳定判据代数稳定判据::::代数稳定判据代数稳定判据代数稳定判据代数稳定判据::::劳斯判据劳斯判据劳斯判据劳斯判据、、、、古尔维茨判据古尔维茨判据古尔维茨判据古尔维茨判据劳斯判据劳斯判据劳斯判据劳斯判据、、、、古尔维茨判据古尔维茨判据古尔维茨判据古尔维茨判据
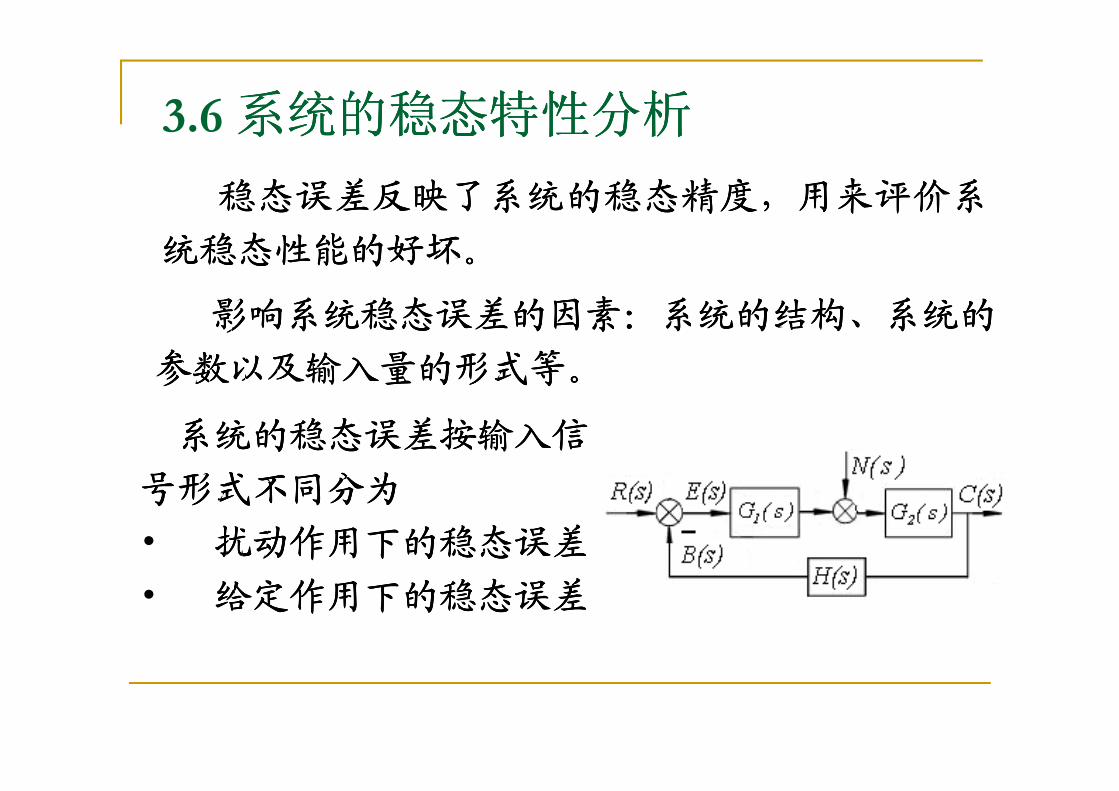
3.6 系统的稳态特性分析系统的稳态特性分析系统的稳态特性分析系统的稳态特性分析
稳态误差反映了系统的稳态精度稳态误差反映了系统的稳态精度稳态误差反映了系统的稳态精度稳态误差反映了系统的稳态精度 用 评价系用 评价系用 评价系用 评价系
统稳态 能的好坏统稳态 能的好坏统稳态 能的好坏统稳态 能的好坏。。。。
影响系统稳态误差的因素影响系统稳态误差的因素影响系统稳态误差的因素影响系统稳态误差的因素 系统的结构系统的结构系统的结构系统的结构、、、、系统的系统的系统的系统的
参数以及输入量的形式等参数以及输入量的形式等参数以及输入量的形式等参数以及输入量的形式等。。。。
系统的稳态误差按输入信系统的稳态误差按输入信系统的稳态误差按输入信系统的稳态误差按输入信
号形式不同分为号形式不同分为号形式不同分为号形式不同分为
• 扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差
• 给定作用下的稳态误差给定作用下的稳态误差给定作用下的稳态误差给定作用下的稳态误差
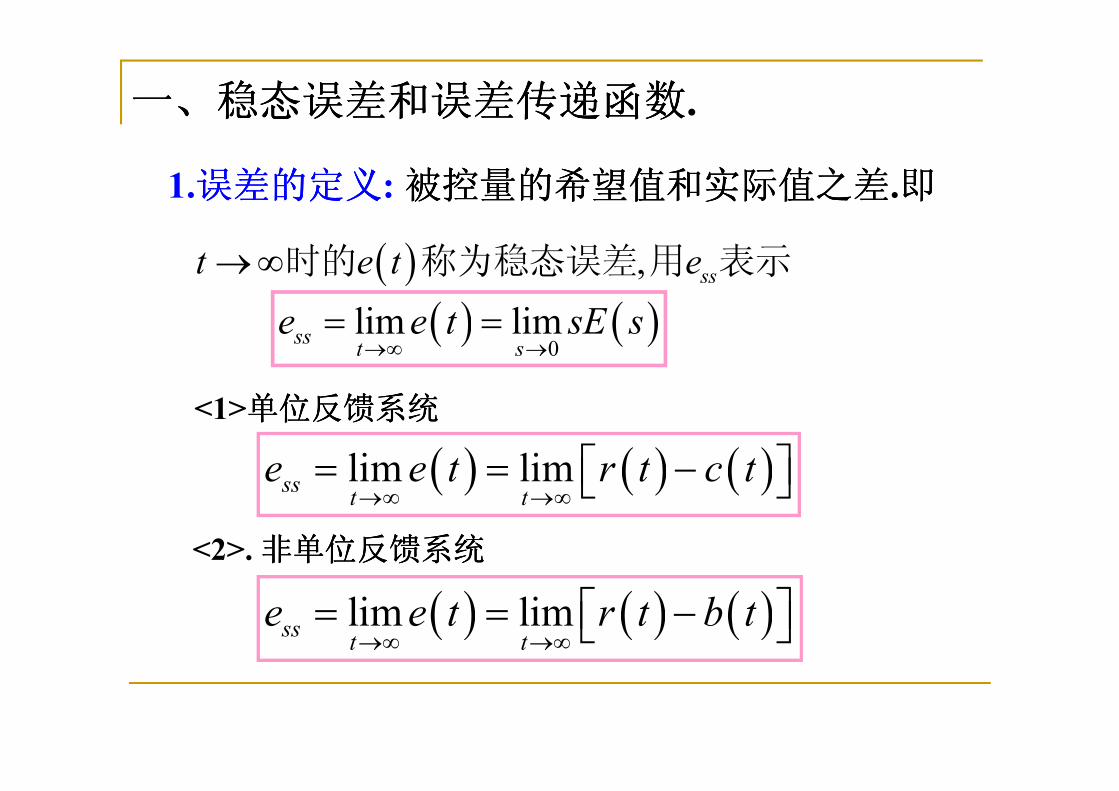
( ) , sst e t e→∞时的 为稳态误差 用 表示
一一一一 稳态误差和误差传递函数稳态误差和误差传递函数稳态误差和误差传递函数稳态误差和误差传递函数.
1.误差的定误差的定误差的定误差的定 : 被控量的希望值和实际值之差被控量的希望值和实际值之差被控量的希望值和实际值之差被控量的希望值和实际值之差.即即即即
<1>单位反馈系统单位反馈系统单位反馈系统单位反馈系统
( ) ( )0
lim limsst s
e e t sE s→∞ →
= =
( ) ( ) ( )lim limsst t
e e t r t c t→∞ →∞
= = −
<1>单位反馈系统单位反馈系统单位反馈系统单位反馈系统
<2>. 非单位反馈系统非单位反馈系统非单位反馈系统非单位反馈系统
( ) ( ) ( )lim limsst t
e e t r t b t→∞ →∞
= = −
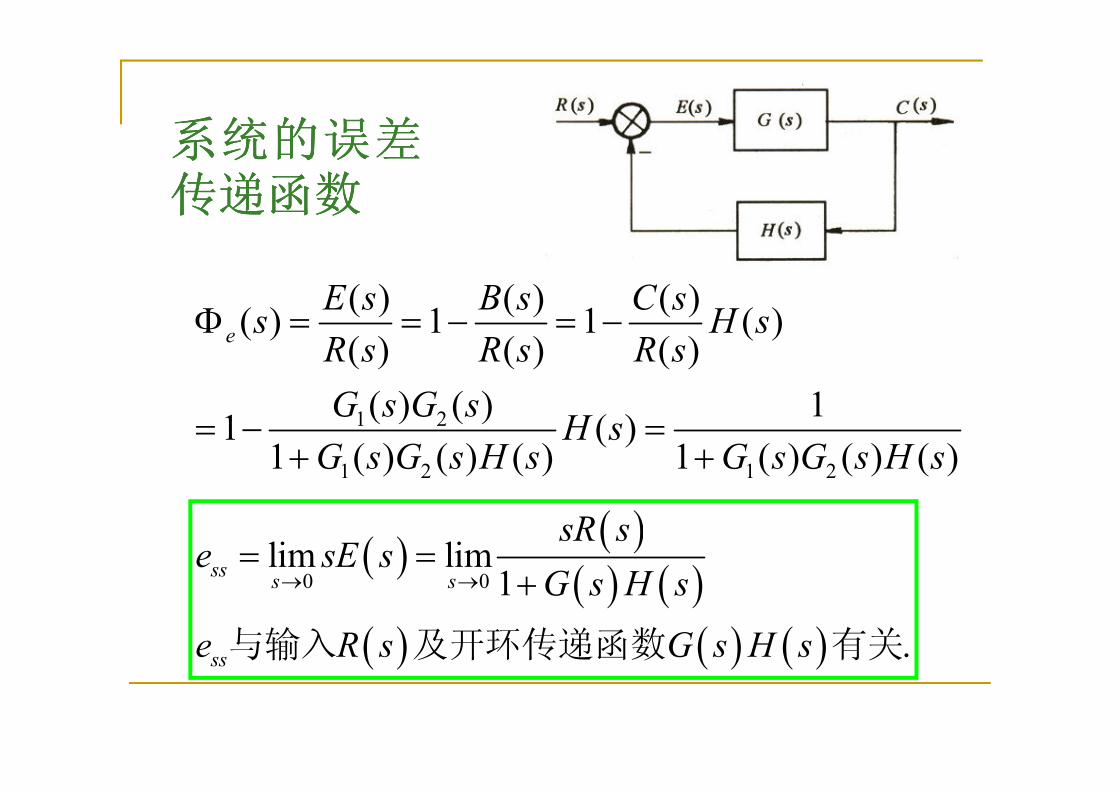
系统的系统的系统的系统的误差误差误差误差
传递函数传递函数传递函数传递函数
( ) ( ) ( )( ) 1 1 ( )
( ) ( ) ( )
( ) ( ) 1
e
E s B s C ss H s
R s R s R s
G s G s
Φ = = − = −
( ) ( )( ) ( )
( ) ( ) ( )
0 0lim lim
1
.
sss s
ss
sR se sE s
G s H s
e R s G s H s
→ →= =
+
输入 及开 传递函数 有关
1 2
1 2 1 2
( ) ( ) 11 ( )
1 ( ) ( ) ( ) 1 ( ) ( ) ( )
G s G sH s
G s G s H s G s G s H s= − =
+ +
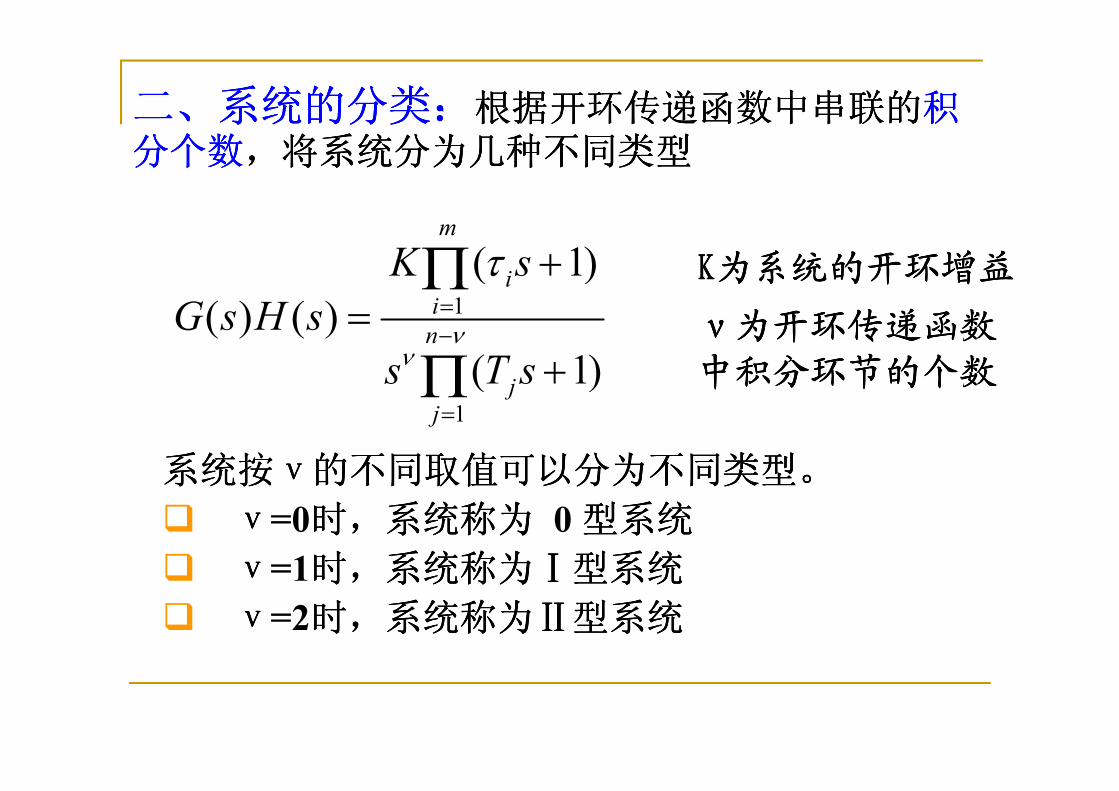
二二二二 系统的分类系统的分类系统的分类系统的分类 根据开 传递函数中串联的根据开 传递函数中串联的根据开 传递函数中串联的根据开 传递函数中串联的
分个数分个数分个数分个数,,,,将系统分为几种 同类型将系统分为几种 同类型将系统分为几种 同类型将系统分为几种 同类型
1
( 1)
( ) ( )
( 1)
m
ii
n
j
K s
G s H s
s T sν
ν
τ=−
+=
+
Π
Π
KKKK为系统的开环增益为系统的开环增益为系统的开环增益为系统的开环增益
νννν为开环传递函数为开环传递函数为开环传递函数为开环传递函数
中积分环节的个数中积分环节的个数中积分环节的个数中积分环节的个数
1j
j=Π
系统按系统按系统按系统按νννν的 同取值可 分为 同类型的 同取值可 分为 同类型的 同取值可 分为 同类型的 同取值可 分为 同类型
� νννν=0时时时时,,,,系统 为系统 为系统 为系统 为 0 型系统型系统型系统型系统
� νννν=1时时时时,,,,系统 为系统 为系统 为系统 为 型系统型系统型系统型系统
� νννν=2时时时时,,,,系统 为系统 为系统 为系统 为 型系统型系统型系统型系统
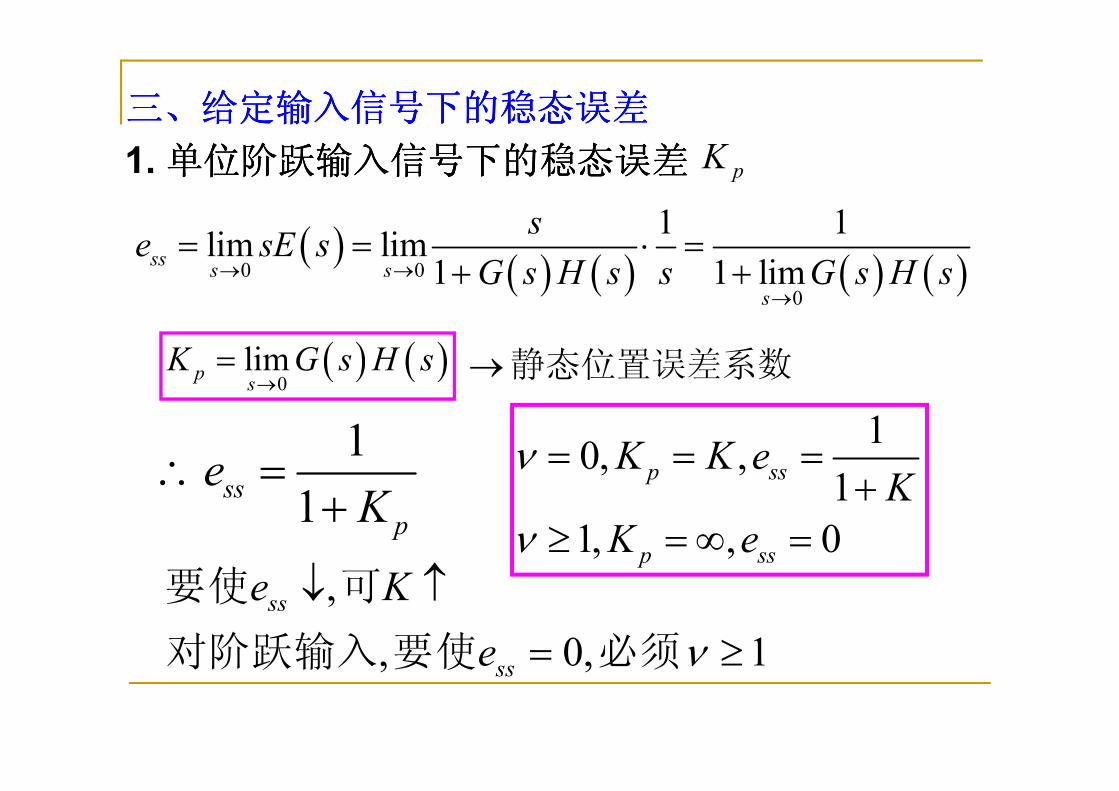
给定输入信号 的稳态误差给定输入信号 的稳态误差给定输入信号 的稳态误差给定输入信号 的稳态误差
pK( ) ( ) ( ) 11 ,r t t R s
s= =
( )( ) ( ) ( ) ( )0 0
0
1 1lim lim
1 1 limss
s s
s
se sE s
G s H s s G s H s→ →→
= = ⋅ =+ +
( ) ( )0
limps
K G s H s→
= →静态位置误差系数
1. 单位阶跃输入信号 的稳态误差单位阶跃输入信号 的稳态误差单位阶跃输入信号 的稳态误差单位阶跃输入信号 的稳态误差
1
1ss
p
eK
∴ =+
10, ,
1
1, , 0
p ss
p ss
K K eK
K e
ν
ν
= = =+
≥ = ∞ =,
, 0, 1
ss
ss
e K
e ν
↓ ↑
= ≥
要使 可
对阶跃输入 要使 必须
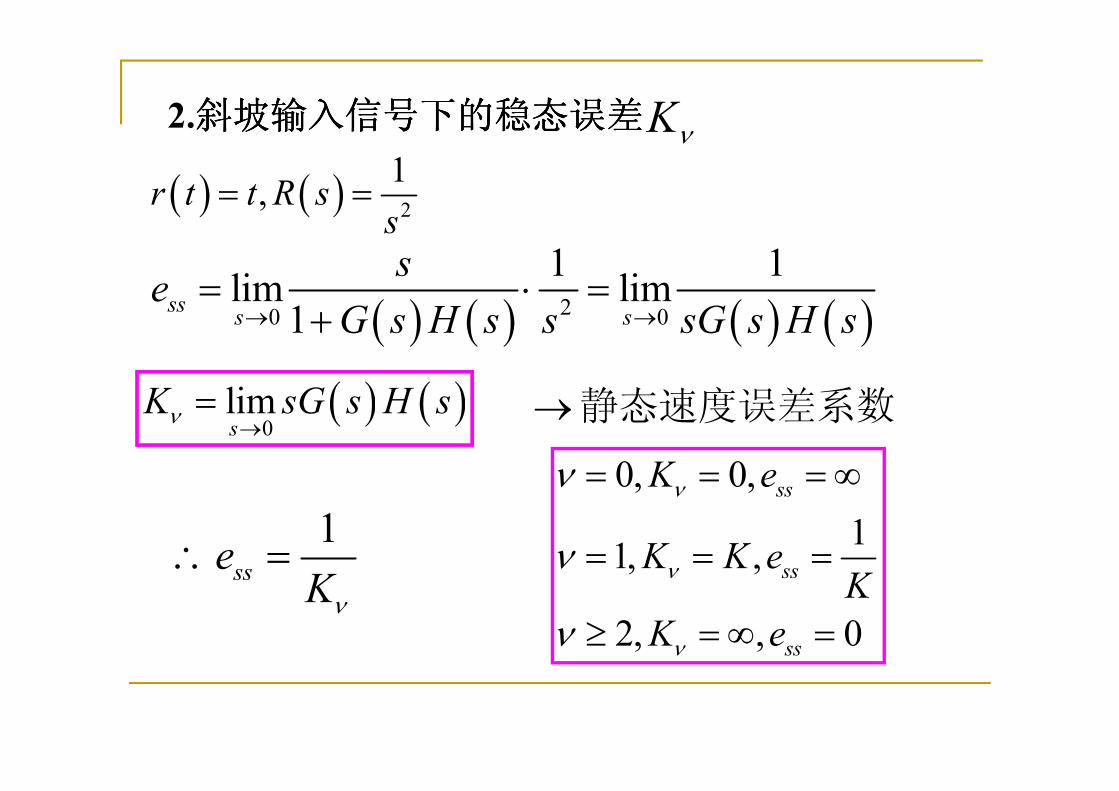
2.斜坡输入信号 的稳态误差斜坡输入信号 的稳态误差斜坡输入信号 的稳态误差斜坡输入信号 的稳态误差 νK
( ) ( )2
1,r t t R s
s= =
( ) ( ) ( ) ( )20 0
1 1lim lim
1ss
s s
se
G s H s s sG s H s→ →= ⋅ =
+
( ) ( )limK sG s H s= →静态速度误差系数
0, 0,
11, ,
2, , 0
ss
ss
ss
K e
K K eK
K e
ν
ν
ν
ν
ν
ν
= = = ∞
= = =
≥ = ∞ =
( ) ( )0
lims
K sG s H sν →= →静态速度误差系数
1sse
Kν
∴ =
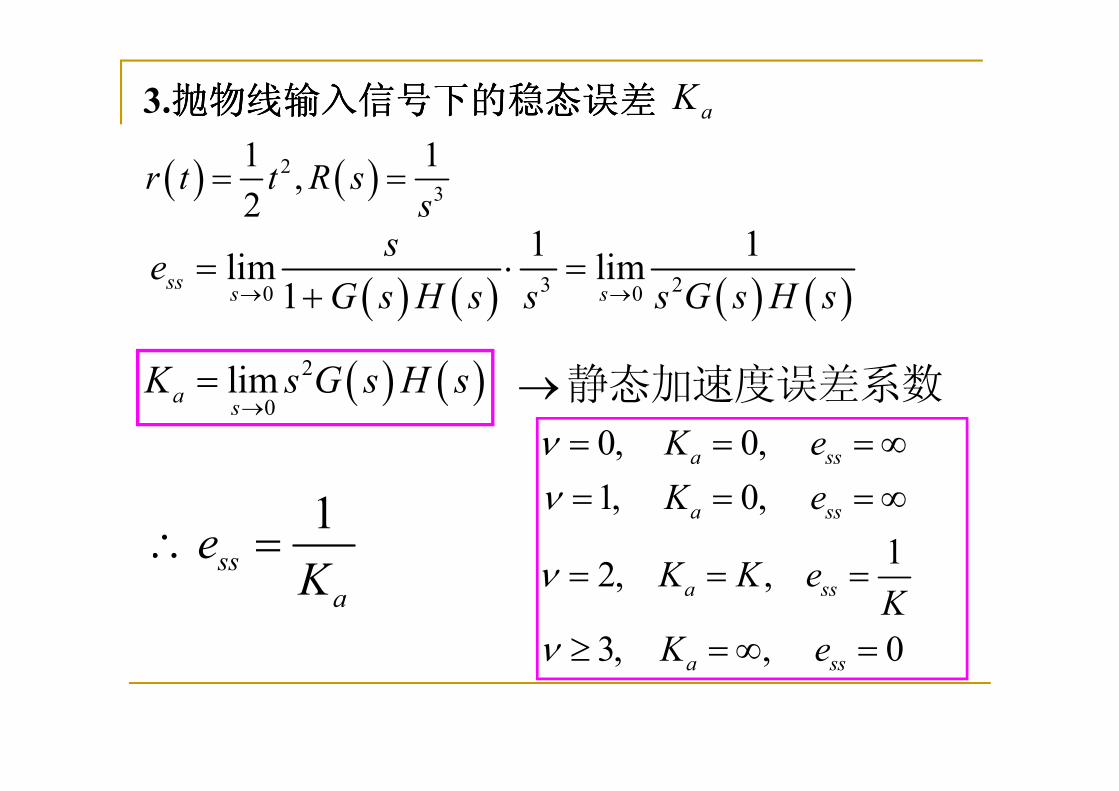
3.抛物线输入信号 的稳态误差抛物线输入信号 的稳态误差抛物线输入信号 的稳态误差抛物线输入信号 的稳态误差 aK
( ) ( )2
3
1 1,
2r t t R s
s= =
( ) ( ) ( ) ( )3 20 0
1 1lim lim
1ss
s s
se
G s H s s s G s H s→ →= ⋅ =
+
→静态加速度误差系数( ) ( )2
0limas
K s G s H s→
= →静态加速度误差系数
1ss
a
eK
∴ =
0, 0,
1, 0,
12, ,
3, , 0
a ss
a ss
a ss
a ss
K e
K e
K K eK
K e
νν
ν
ν
= = = ∞
= = = ∞
= = =
≥ = ∞ =
( ) ( )0
limas
K s G s H s→
=

系统系统系统系统
类型类型类型类型
误差系数误差系数误差系数误差系数型输入作用 稳态误差型输入作用 稳态误差型输入作用 稳态误差型输入作用 稳态误差
KpKpKpKp KvKvKvKv阶跃阶跃阶跃阶跃
r=r=r=r=
R.1(t)R.1(t)R.1(t)R.1(t)
斜坡斜坡斜坡斜坡
r=vtr=vtr=vtr=vt
抛物线抛物线抛物线抛物线
r=atr=atr=atr=at2222
/2/2/2/2
0000型型型型 KKKK 0000 0000 R/(R/(R/(R/(1+Kp)))) ∞∞∞∞ ∞∞∞∞
KaKaKaKa
表表表表3-1 误差系数和稳态误差误差系数和稳态误差误差系数和稳态误差误差系数和稳态误差
0000型型型型
系统系统系统系统
KKKK 0000 0000 R/(R/(R/(R/(1+Kp)))) ∞∞∞∞ ∞∞∞∞
型型型型
系统系统系统系统
∞∞∞∞ KKKK 0000 0000 v/Kv/Kv/Kv/Kvvvv
∞∞∞∞
型型型型
系统系统系统系统
∞∞∞∞ ∞∞∞∞ KKKK 0000 0000 a/Kaa/Kaa/Kaa/Ka
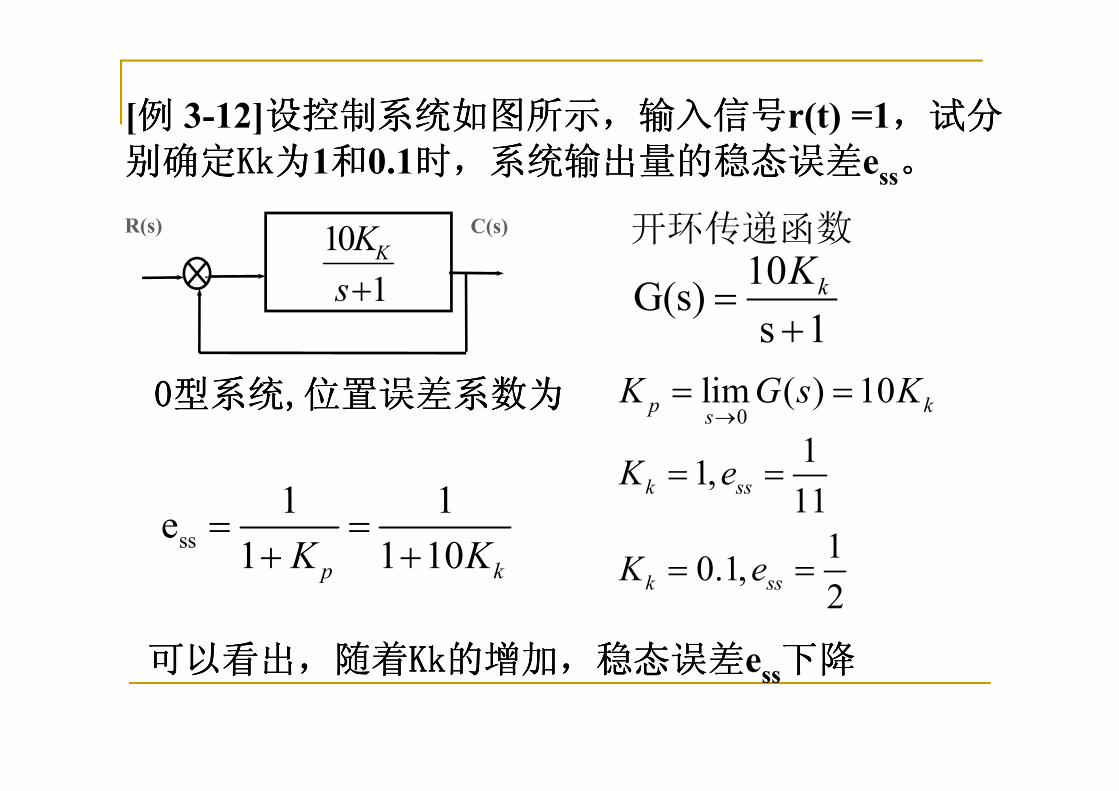
[例例例例 3-12]设控制系统如图所示设控制系统如图所示设控制系统如图所示设控制系统如图所示,,,,输入信号输入信号输入信号输入信号r(t) =1,,,,试分试分试分试分
确定确定确定确定KkKkKkKk为为为为1和和和和0.1时时时时,,,,系统输出量的稳态误差系统输出量的稳态误差系统输出量的稳态误差系统输出量的稳态误差ess
开 传递函数
10G(s)
s 1
kK=
+
lim ( ) 10p kK G s K= =0000型系统型系统型系统型系统,,,,位置误差系数为位置误差系数为位置误差系数为位置误差系数为
R(s)
-
10
1
KK
s+
C(s)
0lim ( ) 10p ks
K G s K→
= =
ss
1 1 e
1 1 10p kK K= =
+ +
11,
11
10.1,
2
k ss
k ss
K e
K e
= =
= =
可 看出可 看出可 看出可 看出,,,,随着随着随着随着KkKkKkKk的增加的增加的增加的增加,,,,稳态误差稳态误差稳态误差稳态误差ess 降降降降
0000型系统型系统型系统型系统,,,,位置误差系数为位置误差系数为位置误差系数为位置误差系数为
2
10( 1)( )
( 4)
sG s
s s
+=
+
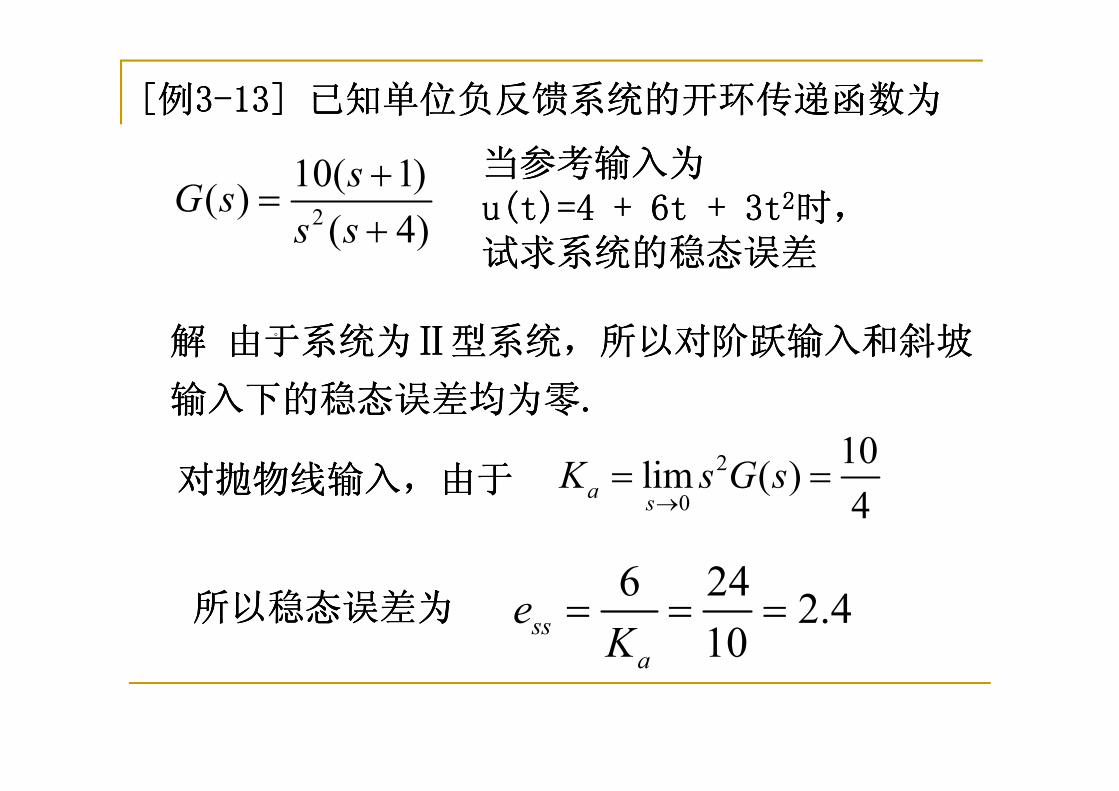
[[[[例例例例3333----13] 13] 13] 13] 已知单位负反馈系统的开 传递函数为已知单位负反馈系统的开 传递函数为已知单位负反馈系统的开 传递函数为已知单位负反馈系统的开 传递函数为
当参考输入为当参考输入为当参考输入为当参考输入为
u(t)=4 + 6t + 3tu(t)=4 + 6t + 3tu(t)=4 + 6t + 3tu(t)=4 + 6t + 3t2222
时时时时,,,,
试求系统的稳态误差试求系统的稳态误差试求系统的稳态误差试求系统的稳态误差
解解解解 由于系统为由于系统为由于系统为由于系统为 型系统型系统型系统型系统,,,,所 对阶跃输入和斜坡所 对阶跃输入和斜坡所 对阶跃输入和斜坡所 对阶跃输入和斜坡
输入 的稳态误差均为零输入 的稳态误差均为零输入 的稳态误差均为零输入 的稳态误差均为零....
2
0
10lim ( )
4a
sK s G s
→= =
6 242.4
10ss
a
eK
= = =
输入 的稳态误差均为零输入 的稳态误差均为零输入 的稳态误差均为零输入 的稳态误差均为零....
对抛物线输入对抛物线输入对抛物线输入对抛物线输入,,,,由于由于由于由于
所 稳态误差为所 稳态误差为所 稳态误差为所 稳态误差为
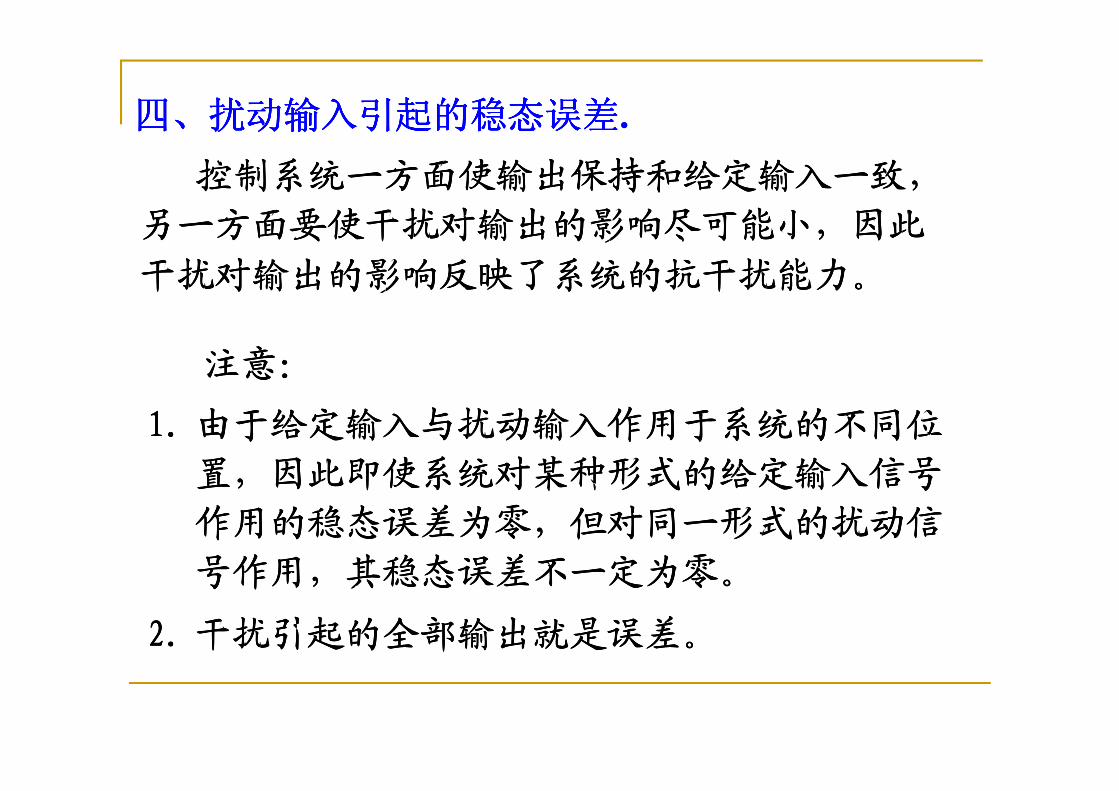
四四四四 扰 输入引起的稳态误差扰 输入引起的稳态误差扰 输入引起的稳态误差扰 输入引起的稳态误差四四四四 扰 输入引起的稳态误差扰 输入引起的稳态误差扰 输入引起的稳态误差扰 输入引起的稳态误差..
控制系统一方面使输出保持和给定输入一致控制系统一方面使输出保持和给定输入一致控制系统一方面使输出保持和给定输入一致控制系统一方面使输出保持和给定输入一致
另一方面要使干扰对输出的影响尽可能小另一方面要使干扰对输出的影响尽可能小另一方面要使干扰对输出的影响尽可能小另一方面要使干扰对输出的影响尽可能小 因此因此因此因此
干扰对输出的影响反映了系统的抗干扰能力干扰对输出的影响反映了系统的抗干扰能力干扰对输出的影响反映了系统的抗干扰能力干扰对输出的影响反映了系统的抗干扰能力。。。。
注意注意注意注意
1.1.1.1. 由于给定输入与扰动输入作用于系统的不同位由于给定输入与扰动输入作用于系统的不同位由于给定输入与扰动输入作用于系统的不同位由于给定输入与扰动输入作用于系统的不同位
置置置置 因此即使系统对某种形式的给定输入信号因此即使系统对某种形式的给定输入信号因此即使系统对某种形式的给定输入信号因此即使系统对某种形式的给定输入信号
作用的稳态误差为零作用的稳态误差为零作用的稳态误差为零作用的稳态误差为零 但对同一形式的扰动信但对同一形式的扰动信但对同一形式的扰动信但对同一形式的扰动信
号作用号作用号作用号作用 其稳态误差不一定为零其稳态误差不一定为零其稳态误差不一定为零其稳态误差不一定为零。。。。
2.2.2.2. 干扰引起的全部输出就是误差干扰引起的全部输出就是误差干扰引起的全部输出就是误差干扰引起的全部输出就是误差。。。。
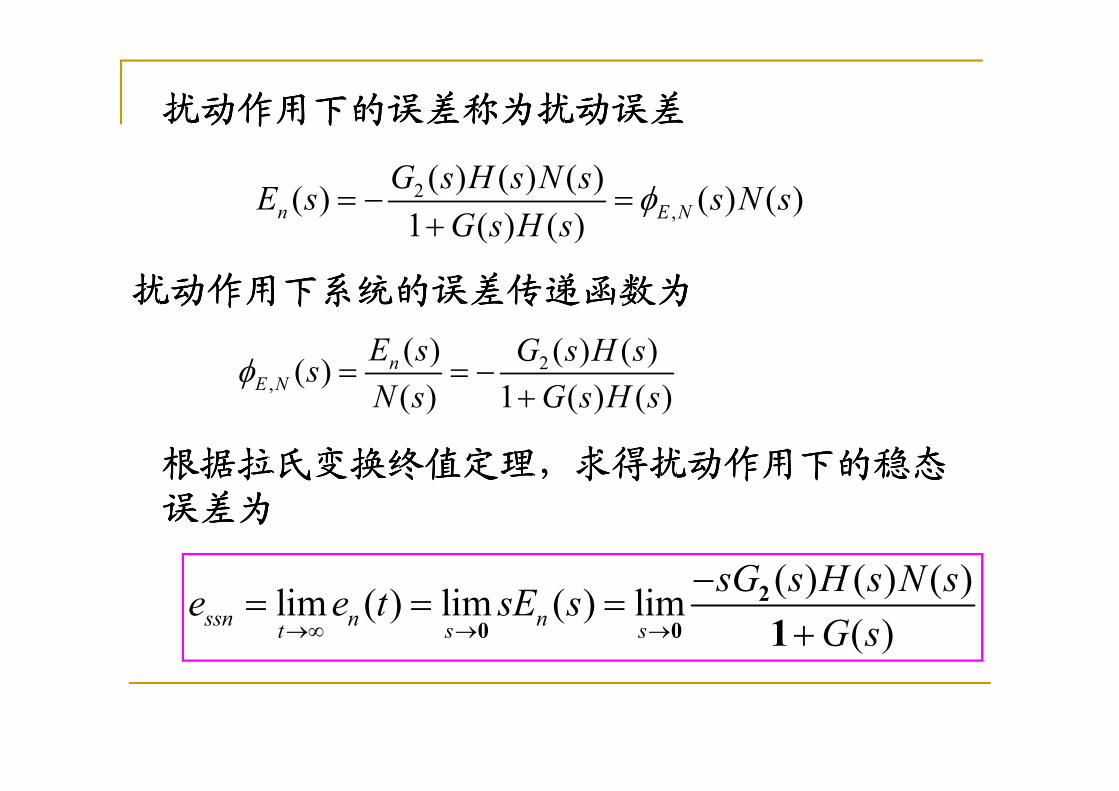
扰动作用下的误差称为扰动误差扰动作用下的误差称为扰动误差扰动作用下的误差称为扰动误差扰动作用下的误差称为扰动误差
2,
( ) ( ) ( )( ) ( ) ( )
1 ( ) ( )n E N
G s H s N sE s s N s
G s H sφ= − =
+
扰动作用下系统的误差传递函数为扰动作用下系统的误差传递函数为扰动作用下系统的误差传递函数为扰动作用下系统的误差传递函数为
2,
( ) ( ) ( )( )
( ) 1 ( ) ( )
nE N
E s G s H ss
N s G s H sφ = = −
+
根据拉氏变换终值定理根据拉氏变换终值定理根据拉氏变换终值定理根据拉氏变换终值定理 求得扰动作用下的稳态求得扰动作用下的稳态求得扰动作用下的稳态求得扰动作用下的稳态
误差为误差为误差为误差为
( ) ( ) ( )lim ( ) lim ( ) lim
( )ssn n n
t s s
sG s H s N se e t sE s
G s→∞ → →
−= = =
+2
0 0 1
( ) 1 ( ) ( )N s G s H s+
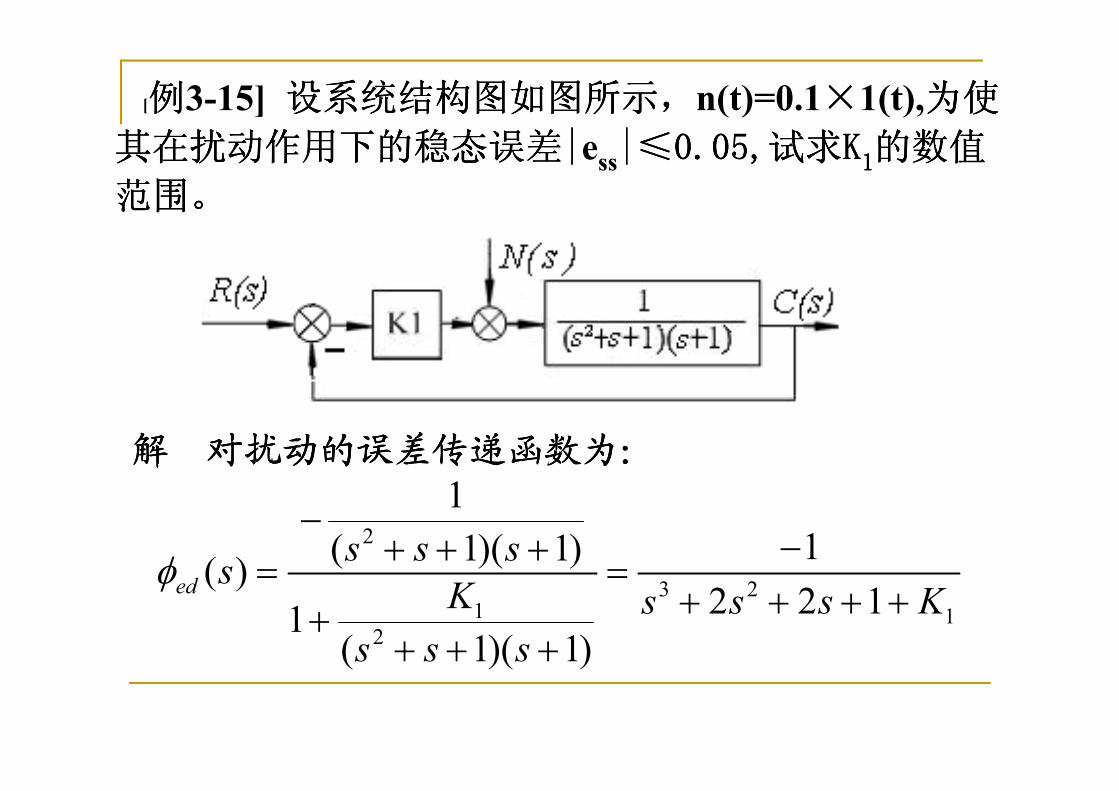
[例例例例3-15] 设系统结构图如图所示设系统结构图如图所示设系统结构图如图所示设系统结构图如图所示,,,,n(t)=0.1××××1(t),为使为使为使为使
在扰 作用 的稳态误差在扰 作用 的稳态误差在扰 作用 的稳态误差在扰 作用 的稳态误差||||ess|≤0.05,|≤0.05,|≤0.05,|≤0.05,试求试求试求试求KKKK1111
的数值的数值的数值的数值
范围范围范围范围
解解解解 对扰动的误差传递函数为对扰动的误差传递函数为对扰动的误差传递函数为对扰动的误差传递函数为
2
3 21 1
2
1
1( 1)( 1)( )
2 2 11
( 1)( 1)
ed
s s ss
K s s s K
s s s
φ−
−+ + += =
+ + + +++ + +
3 20 01 1
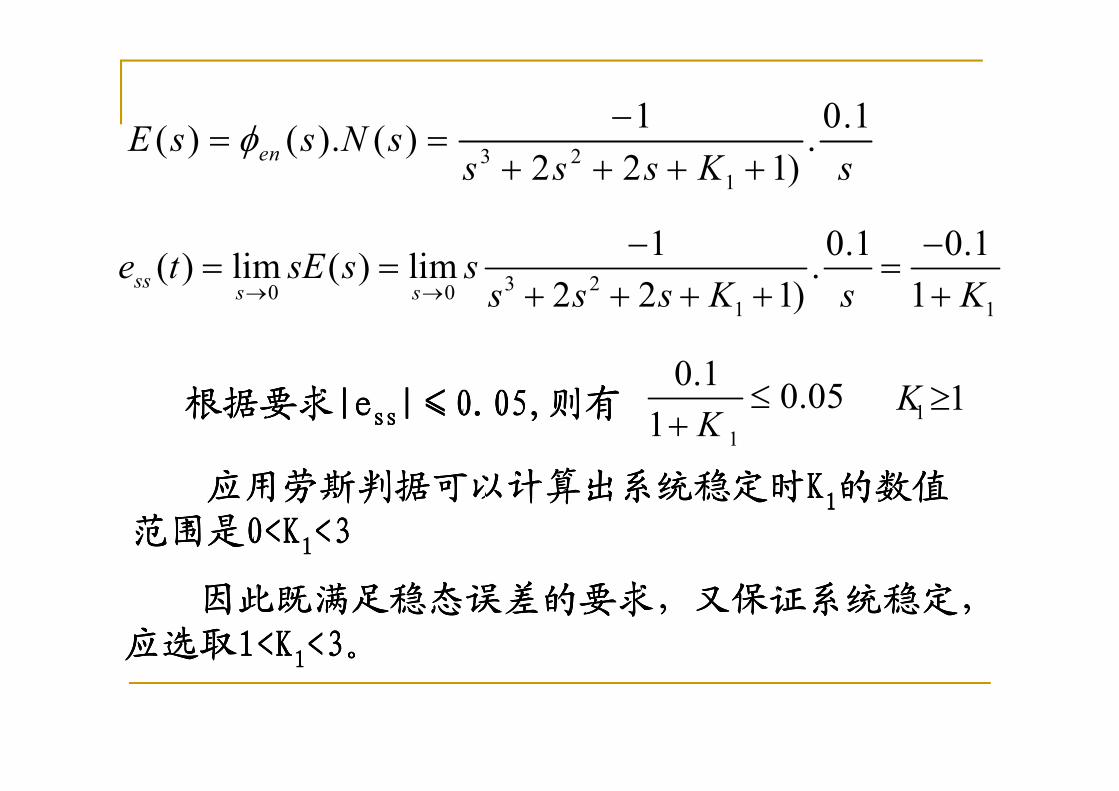
1 0.1 0.1( ) lim ( ) lim .
2 2 1) 1ss
s se t sE s s
s s s K s K→ →
− −= = =
+ + + + +
0.10.05≤ 1K ≥
3 2
1
1 0.1( ) ( ). ( ) .
2 2 1)enE s s N s
s s s K sφ
−= =
+ + + +
根据要求根据要求根据要求根据要求|e|e|e|e |≤,.,5(|≤,.,5(|≤,.,5(|≤,.,5(则有则有则有则有
1
0.051 K
≤+ 1 1K ≥
应用劳斯判据可以计算出系统稳定时应用劳斯判据可以计算出系统稳定时应用劳斯判据可以计算出系统稳定时应用劳斯判据可以计算出系统稳定时KKKK1111
的数值的数值的数值的数值
范围是范围是范围是范围是,<K,<K,<K,<K1111
<3 <3 <3 <3
因此既满足稳态误差的要求因此既满足稳态误差的要求因此既满足稳态误差的要求因此既满足稳态误差的要求 又保证系统稳定又保证系统稳定又保证系统稳定又保证系统稳定
应选取应选取应选取应选取1111<K<K<K<K1111
<<<<3333。。。。
根据要求根据要求根据要求根据要求|e|e|e|essssssss
|≤,.,5(|≤,.,5(|≤,.,5(|≤,.,5(则有则有则有则有
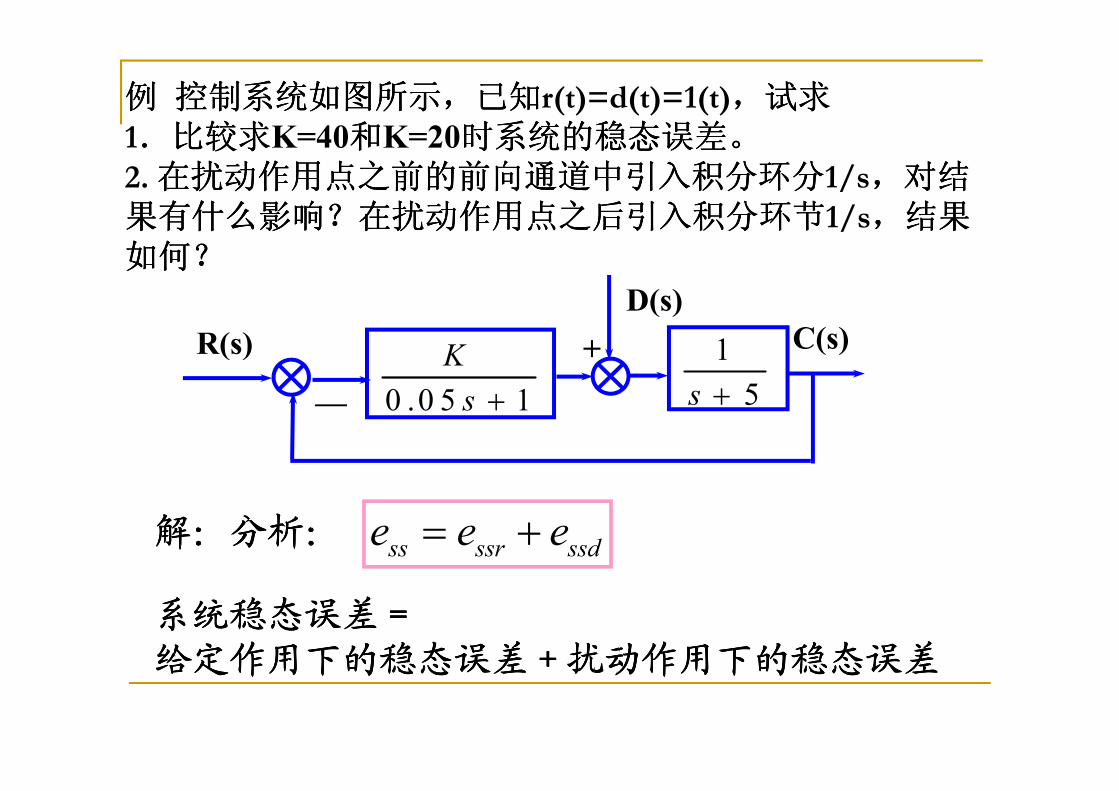
例例例例 控制系统如图所示控制系统如图所示控制系统如图所示控制系统如图所示,,,,已知已知已知已知r(t)=d(t)=1(t),,,,试求试求试求试求
1....比较求比较求比较求比较求K=40和和和和K=20时系统的稳态误差时系统的稳态误差时系统的稳态误差时系统的稳态误差
2. 在扰 作用点之前的前向通道中引入 分 分在扰 作用点之前的前向通道中引入 分 分在扰 作用点之前的前向通道中引入 分 分在扰 作用点之前的前向通道中引入 分 分1/s,,,,对结对结对结对结
果有什 影响果有什 影响果有什 影响果有什 影响????在扰 作用点之后引入 分 节在扰 作用点之后引入 分 节在扰 作用点之后引入 分 节在扰 作用点之后引入 分 节1/s,,,,结果结果结果结果
如何如何如何如何????
R(s) C(s)
—
1
5s +0 .0 5 1
K
s +
+
D(s)
— 5s +0 .0 5 1s +
系统稳态误差系统稳态误差系统稳态误差系统稳态误差====
给定作用下的稳态误差给定作用下的稳态误差给定作用下的稳态误差给定作用下的稳态误差 扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差
ss ssr ssde e e= +解解解解 分析分析分析分析
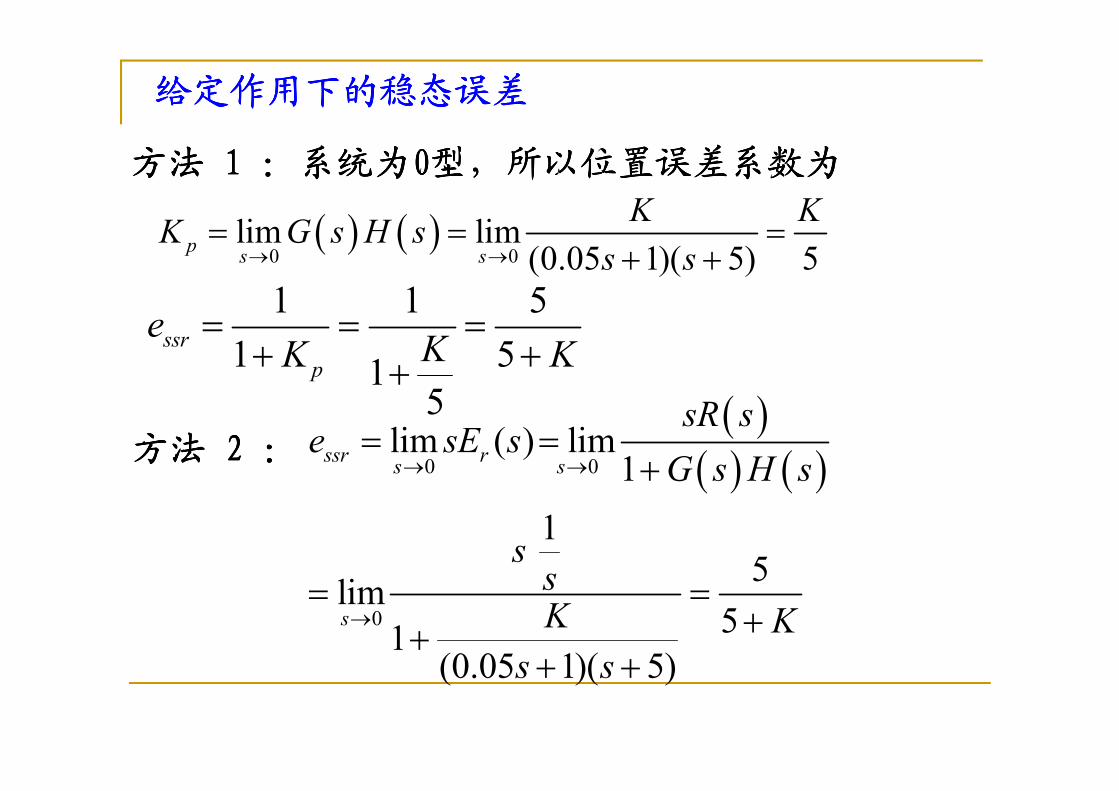
给定作用下的稳态误差给定作用下的稳态误差给定作用下的稳态误差给定作用下的稳态误差
方法方法方法方法 1 1 1 1 系统为系统为系统为系统为,,,,型型型型 所以位置误差系数为所以位置误差系数为所以位置误差系数为所以位置误差系数为
( ) ( )0 0
lim lim(0.05 1)( 5) 5
ps s
K KK G s H s
s s→ →= = =
+ +1 1 5
1 51
5
ssr
p
eKK K
= = =+ ++
( )sR s5
方法方法方法方法 2 2 2 2
( )( ) ( )0 0
0
lim ( ) lim1
1
5lim
51
(0.05 1)( 5)
ssr rs s
s
sR se sE s
G s H s
ssK K
s s
→ →
→
= =+
= =++
+ +
�
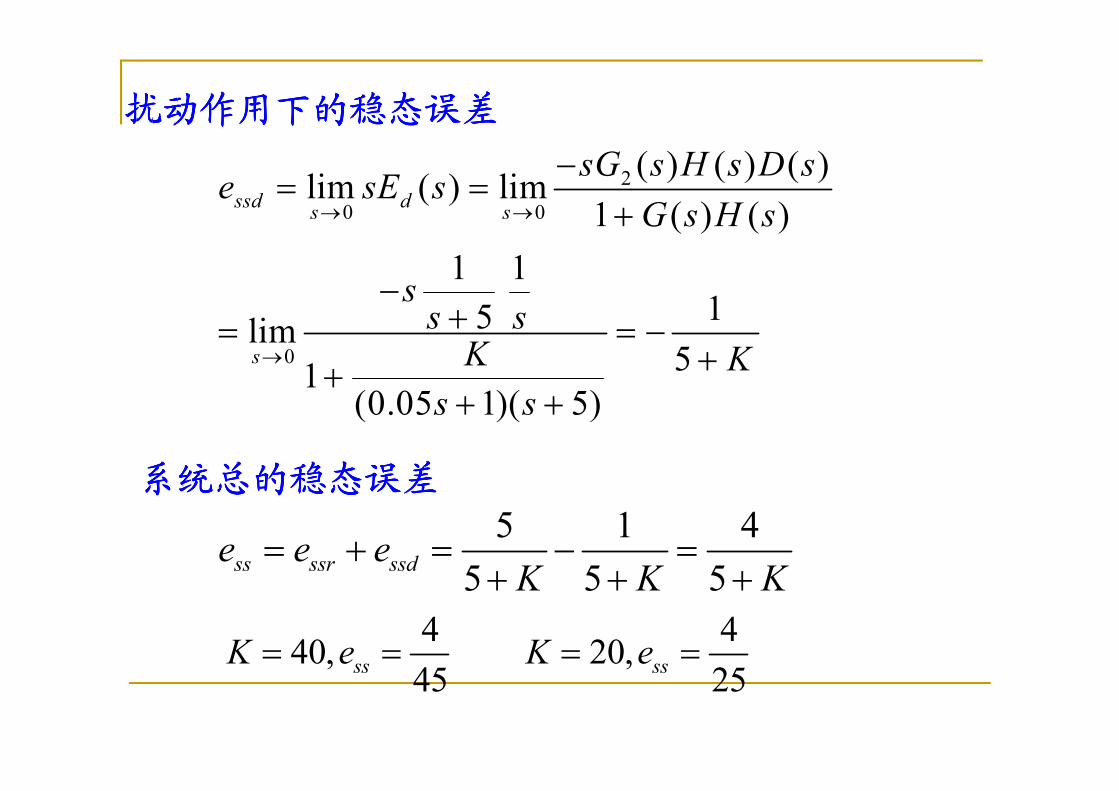
扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差
2
0 0
0
( ) ( ) ( )lim ( ) lim
1 ( ) ( )
1 1
15lim5
1(0.05 1)( 5)
ssd ds s
s
sG s H s D se sE s
G s H s
ss s
K K
s s
→ →
→
−= =
+
−+= = −
+++ +
�
(0.05 1)( 5)s s+ +
5 1 4
5 5 5ss ssr ssde e e
K K K= + = − =
+ + +
系统总的稳态误差系统总的稳态误差系统总的稳态误差系统总的稳态误差
4 440, 20,
45 25ss ssK e K e= = = =
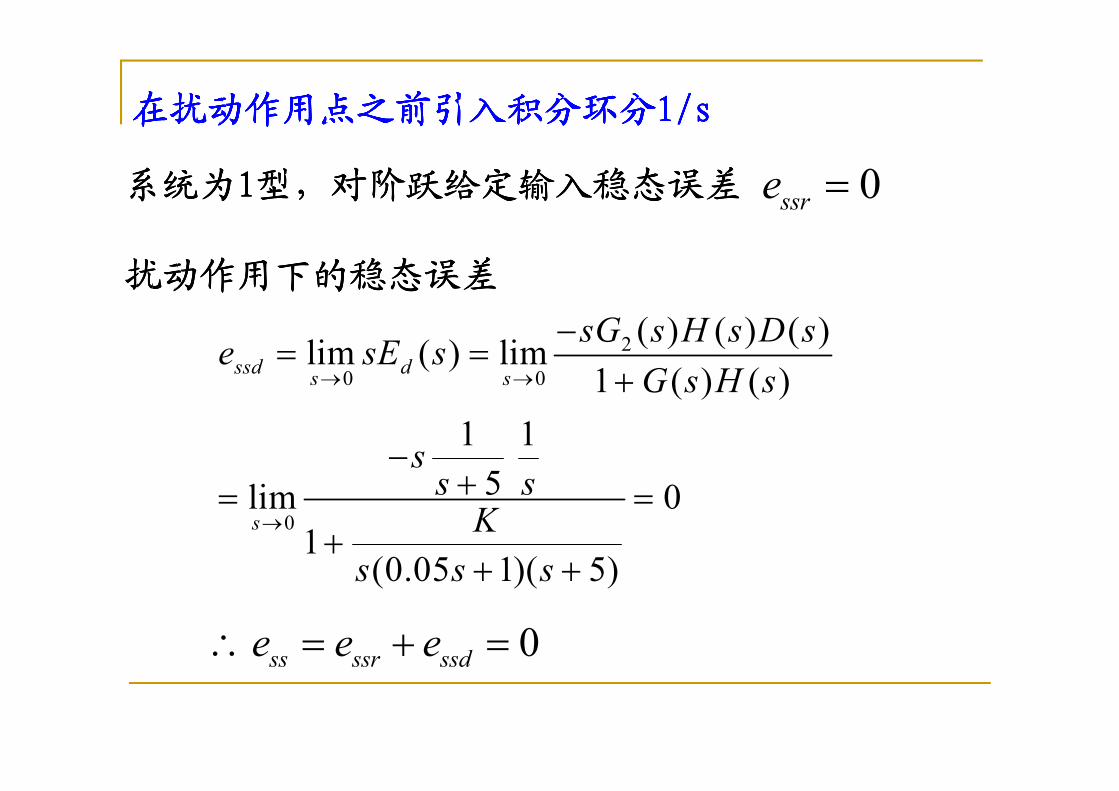
在扰动作用点之前引入积分环分在扰动作用点之前引入积分环分在扰动作用点之前引入积分环分在扰动作用点之前引入积分环分在扰动作用点之前引入积分环分在扰动作用点之前引入积分环分在扰动作用点之前引入积分环分在扰动作用点之前引入积分环分1+s1+s1+s1+s1+s1+s1+s1+s
系统为系统为系统为系统为1111型型型型 对阶跃给定输入稳态误差对阶跃给定输入稳态误差对阶跃给定输入稳态误差对阶跃给定输入稳态误差
扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差
0ssre =
2
0 0
( ) ( ) ( )lim ( ) lim
1 ( ) ( )ssd d
s s
sG s H s D se sE s
G s H s→ →
−= =
+
0
1 ( ) ( )
1 1
5lim 0
1(0.05 1)( 5)
s
G s H s
ss s
K
s s s
→
+
−+= =
++ +
�
0ss ssr ssde e e∴ = + =
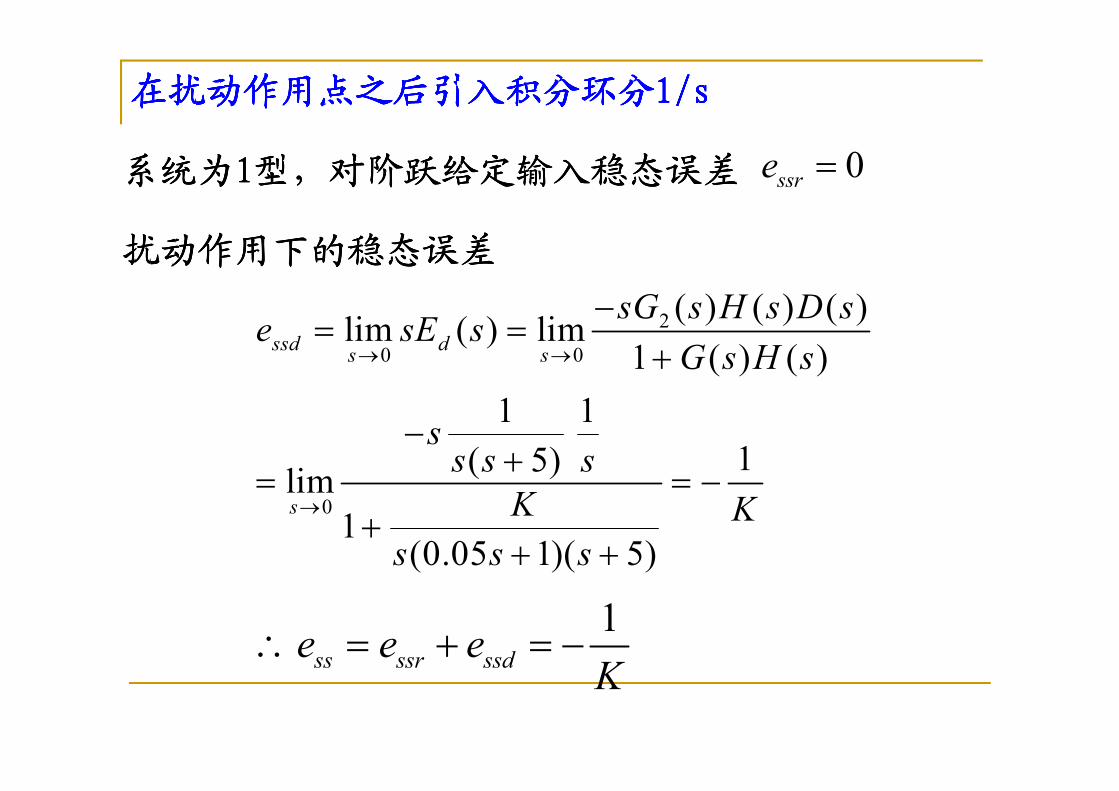
在扰动作用点之后引入积分环分在扰动作用点之后引入积分环分在扰动作用点之后引入积分环分在扰动作用点之后引入积分环分在扰动作用点之后引入积分环分在扰动作用点之后引入积分环分在扰动作用点之后引入积分环分在扰动作用点之后引入积分环分1+s1+s1+s1+s1+s1+s1+s1+s
系统为系统为系统为系统为1111型型型型 对阶跃给定输入稳态误差对阶跃给定输入稳态误差对阶跃给定输入稳态误差对阶跃给定输入稳态误差
扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差扰动作用下的稳态误差
0ssre =
2
0 0
( ) ( ) ( )lim ( ) lim
1 ( ) ( )
1 1
ssd ds s
sG s H s D se sE s
G s H s→ →
−= =
+
0
1 1
1( 5)lim
1(0.05 1)( 5)
s
ss s s
K K
s s s
→
−+
= = −+
+ +
�
1ss ssr ssde e e
K∴ = + = −
1. 1. 1. 1. 保证系统中各个环节保证系统中各个环节保证系统中各个环节保证系统中各个环节 或元件或元件或元件或元件 特别是反馈回特别是反馈回特别是反馈回特别是反馈回
路中元件的参数具有一定的精度和恒定路中元件的参数具有一定的精度和恒定路中元件的参数具有一定的精度和恒定路中元件的参数具有一定的精度和恒定 必要时需必要时需必要时需必要时需
采用误差补偿措施采用误差补偿措施采用误差补偿措施采用误差补偿措施。。。。
五五五五 减小稳态误差的方法减小稳态误差的方法减小稳态误差的方法减小稳态误差的方法
2. 2. 2. 2. 增大开环放大系数增大开环放大系数增大开环放大系数增大开环放大系数 以提高系统对给定输入的跟以提高系统对给定输入的跟以提高系统对给定输入的跟以提高系统对给定输入的跟
踪能力踪能力踪能力踪能力 增大扰动作用前系统前向通道的增益增大扰动作用前系统前向通道的增益增大扰动作用前系统前向通道的增益增大扰动作用前系统前向通道的增益 以降以降以降以降
低扰动稳态误差低扰动稳态误差低扰动稳态误差低扰动稳态误差。。。。低扰动稳态误差低扰动稳态误差低扰动稳态误差低扰动稳态误差。。。。
3. 3. 3. 3. 增加系统前向通道中积分环节数目增加系统前向通道中积分环节数目增加系统前向通道中积分环节数目增加系统前向通道中积分环节数目 使系统型号使系统型号使系统型号使系统型号
提高提高提高提高 可以消除不同输入信号时的稳态误差可以消除不同输入信号时的稳态误差可以消除不同输入信号时的稳态误差可以消除不同输入信号时的稳态误差。。。。但是但是但是但是
积分环节数目增加会降低系统的稳定积分环节数目增加会降低系统的稳定积分环节数目增加会降低系统的稳定积分环节数目增加会降低系统的稳定 并影响到其并影响到其并影响到其并影响到其
它暂态 能指标它暂态 能指标它暂态 能指标它暂态 能指标。。。。
4. 4. 4. 4. 采用补偿方法进行前馈控制采用补偿方法进行前馈控制采用补偿方法进行前馈控制采用补偿方法进行前馈控制 复合控制复合控制复合控制复合控制
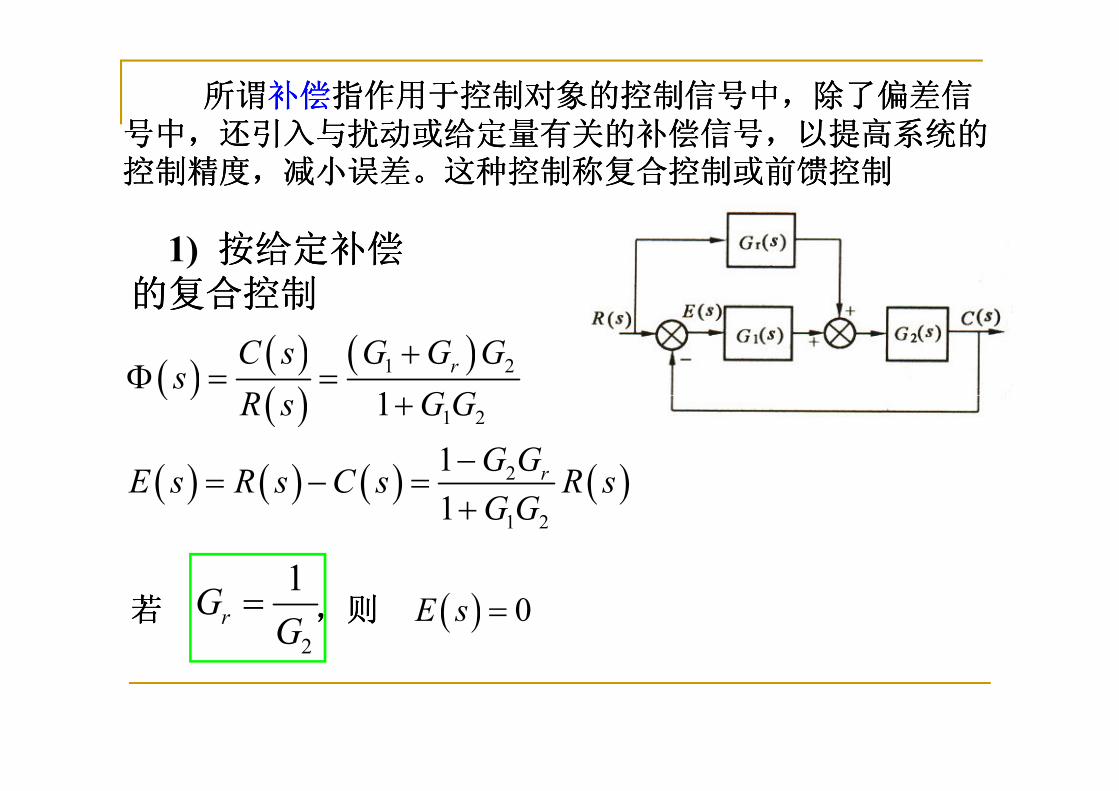
1) 按给定补偿按给定补偿按给定补偿按给定补偿
的复合控制的复合控制的复合控制的复合控制
( ) ( )( )
( )1 2
1
rC s G G Gs
R s G G
+Φ = =
+
所谓所谓所谓所谓补偿补偿补偿补偿指作用于控制对象的控制信号中指作用于控制对象的控制信号中指作用于控制对象的控制信号中指作用于控制对象的控制信号中,,,,除了偏差信除了偏差信除了偏差信除了偏差信
号中号中号中号中,,,, 引入 扰 或给定量有关的补偿信号引入 扰 或给定量有关的补偿信号引入 扰 或给定量有关的补偿信号引入 扰 或给定量有关的补偿信号,,,, 提高系统的提高系统的提高系统的提高系统的
控制精度控制精度控制精度控制精度,,,,减小误差减小误差减小误差减小误差 种控制 复合控制或前馈控制种控制 复合控制或前馈控制种控制 复合控制或前馈控制种控制 复合控制或前馈控制
( )( )
( ) ( ) ( ) ( )
1 2
2
1 2
1
1
1
r
sR s G G
G GE s R s C s R s
G G
Φ = =+
−= − =
+
若若若若 ,,,,则则则则
2
1rG
G= ( ) 0E s =
2 按扰 补偿的复合控制按扰 补偿的复合控制按扰 补偿的复合控制按扰 补偿的复合控制
( ) ( )( ) ( )1 21
1
d
E s C s
G G GD s
G G
= −
+= −
+
[ ]2 1
1 2
( ) ( ) ( ) 1( ) ( )
1 ( ) ( )
dG s G s G sC s D s
G s G s
+=
+
( )1 21 G G+
若若若若 ,,,,则则则则 E(s)=0
1
1dG
G= −
GGGG1111
(s)(s)(s)(s)的分母阶次高于分子的分母阶次高于分子的分母阶次高于分子的分母阶次高于分子 GGGGdddd
(s)(s)(s)(s)的分母阶次的分母阶次的分母阶次的分母阶次
低于分子低于分子低于分子低于分子 物理实现困难物理实现困难物理实现困难物理实现困难
本章小结本章小结本章小结本章小结
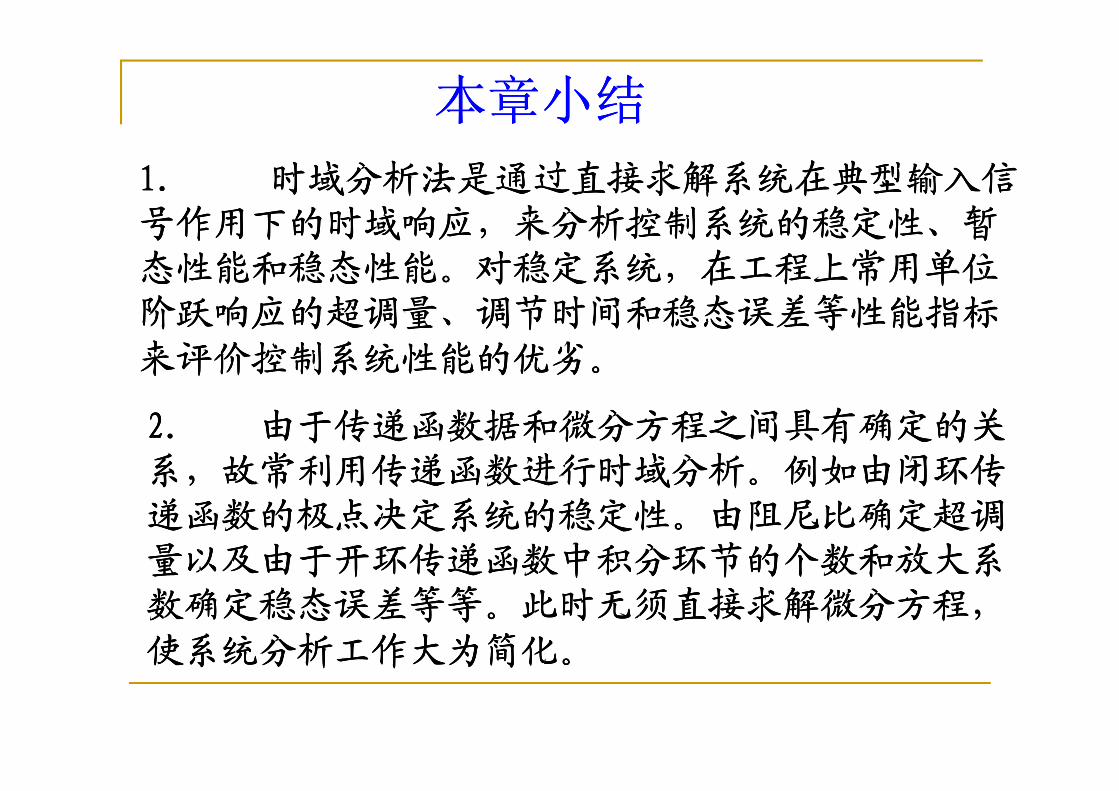
1. 1. 1. 1. 时域分析法是通过直接求解系统在典型输入信时域分析法是通过直接求解系统在典型输入信时域分析法是通过直接求解系统在典型输入信时域分析法是通过直接求解系统在典型输入信
号作用下的时域响应号作用下的时域响应号作用下的时域响应号作用下的时域响应 分析控制系统的稳定分析控制系统的稳定分析控制系统的稳定分析控制系统的稳定 、、、、暂暂暂暂
态 能和稳态 能态 能和稳态 能态 能和稳态 能态 能和稳态 能。。。。对稳定系统对稳定系统对稳定系统对稳定系统 在工程上常用单位在工程上常用单位在工程上常用单位在工程上常用单位
阶跃响应的超调量阶跃响应的超调量阶跃响应的超调量阶跃响应的超调量、、、、调节时间和稳态误差等 能指标调节时间和稳态误差等 能指标调节时间和稳态误差等 能指标调节时间和稳态误差等 能指标
评价控制系统 能的优劣评价控制系统 能的优劣评价控制系统 能的优劣评价控制系统 能的优劣。。。。
2. 2. 2. 2. 由于传递函数据和微分方程之间具有确定的关由于传递函数据和微分方程之间具有确定的关由于传递函数据和微分方程之间具有确定的关由于传递函数据和微分方程之间具有确定的关
系系系系 故常利用传递函数进行时域分析故常利用传递函数进行时域分析故常利用传递函数进行时域分析故常利用传递函数进行时域分析。。。。例如由闭环传例如由闭环传例如由闭环传例如由闭环传
递函数的极点决定系统的稳定递函数的极点决定系统的稳定递函数的极点决定系统的稳定递函数的极点决定系统的稳定 。。。。由阻尼比确定超调由阻尼比确定超调由阻尼比确定超调由阻尼比确定超调
量以及由于开环传递函数中积分环节的个数和放大系量以及由于开环传递函数中积分环节的个数和放大系量以及由于开环传递函数中积分环节的个数和放大系量以及由于开环传递函数中积分环节的个数和放大系
数确定稳态误差等等数确定稳态误差等等数确定稳态误差等等数确定稳态误差等等。。。。此时无须直接求解微分方程此时无须直接求解微分方程此时无须直接求解微分方程此时无须直接求解微分方程
使系统分析工作大为简化使系统分析工作大为简化使系统分析工作大为简化使系统分析工作大为简化。。。。
3. 3. 3. 3. 对二阶系统的分析对二阶系统的分析对二阶系统的分析对二阶系统的分析 在时域分析中占有重要在时域分析中占有重要在时域分析中占有重要在时域分析中占有重要
位置位置位置位置。。。。应牢牢掌握系统 能和系统特征参数间的关应牢牢掌握系统 能和系统特征参数间的关应牢牢掌握系统 能和系统特征参数间的关应牢牢掌握系统 能和系统特征参数间的关
系系系系。。。。对一对一对一对一、、、、二阶系统理论分析的结果二阶系统理论分析的结果二阶系统理论分析的结果二阶系统理论分析的结果 常是分析高常是分析高常是分析高常是分析高
阶系统的基础阶系统的基础阶系统的基础阶系统的基础
4444.... 稳定 是系统正常工作的首要条件稳定 是系统正常工作的首要条件稳定 是系统正常工作的首要条件稳定 是系统正常工作的首要条件。。。。线 系统线 系统线 系统线 系统4444.... 稳定 是系统正常工作的首要条件稳定 是系统正常工作的首要条件稳定 是系统正常工作的首要条件稳定 是系统正常工作的首要条件。。。。线 系统线 系统线 系统线 系统
的稳定 是系统的一种固有特的稳定 是系统的一种固有特的稳定 是系统的一种固有特的稳定 是系统的一种固有特 完全由系统的结完全由系统的结完全由系统的结完全由系统的结
构和参数所决定构和参数所决定构和参数所决定构和参数所决定。。。。判别稳定 的代数方法是劳斯判别稳定 的代数方法是劳斯判别稳定 的代数方法是劳斯判别稳定 的代数方法是劳斯—
古尔维茨代数稳定 判据古尔维茨代数稳定 判据古尔维茨代数稳定 判据古尔维茨代数稳定 判据。。。。稳定 判据只回答特征稳定 判据只回答特征稳定 判据只回答特征稳定 判据只回答特征
方程式的根在方程式的根在方程式的根在方程式的根在ssss平面上的分布情况平面上的分布情况平面上的分布情况平面上的分布情况 而不能确定根的而不能确定根的而不能确定根的而不能确定根的
具体数值具体数值具体数值具体数值。。。。
4444....稳态误差是系统是系统很重要的 能指标稳态误差是系统是系统很重要的 能指标稳态误差是系统是系统很重要的 能指标稳态误差是系统是系统很重要的 能指标 它标它标它标它标
志着系统最终可能达到的精度志着系统最终可能达到的精度志着系统最终可能达到的精度志着系统最终可能达到的精度。。。。稳态误差既和系统稳态误差既和系统稳态误差既和系统稳态误差既和系统
的结构的结构的结构的结构、、、、参数有关参数有关参数有关参数有关 又和外作用的形式及大小有关又和外作用的形式及大小有关又和外作用的形式及大小有关又和外作用的形式及大小有关。。。。
系统类型和误差系数既是恒量稳态误差的一种标志系统类型和误差系数既是恒量稳态误差的一种标志系统类型和误差系数既是恒量稳态误差的一种标志系统类型和误差系数既是恒量稳态误差的一种标志
同时也是计算稳态误差的简便方法同时也是计算稳态误差的简便方法同时也是计算稳态误差的简便方法同时也是计算稳态误差的简便方法。。。。系统型号越高系统型号越高系统型号越高系统型号越高
误差系数越大误差系数越大误差系数越大误差系数越大 系统稳态误差越小系统稳态误差越小系统稳态误差越小系统稳态误差越小。。。。
稳态精度与动态 能在对系统的类型和开环增稳态精度与动态 能在对系统的类型和开环增稳态精度与动态 能在对系统的类型和开环增稳态精度与动态 能在对系统的类型和开环增稳态精度与动态 能在对系统的类型和开环增稳态精度与动态 能在对系统的类型和开环增稳态精度与动态 能在对系统的类型和开环增稳态精度与动态 能在对系统的类型和开环增
益的要求上是相矛盾的益的要求上是相矛盾的益的要求上是相矛盾的益的要求上是相矛盾的。。。。解决这一矛盾的方法解决这一矛盾的方法解决这一矛盾的方法解决这一矛盾的方法 除除除除
了在系统中设置校正装置外了在系统中设置校正装置外了在系统中设置校正装置外了在系统中设置校正装置外 还可用前馈补偿的方还可用前馈补偿的方还可用前馈补偿的方还可用前馈补偿的方
法 提高系统的稳态精度法 提高系统的稳态精度法 提高系统的稳态精度法 提高系统的稳态精度。。。。
作业作业作业作业::::3.13.13.13.1,,,,3.23.23.23.2,,,,3.53.53.53.5 2222 4444 ,,,,3.73.73.73.7,,,,
3.83.83.83.8 2222 ,,,,3.103.103.103.10