Embed Size (px)
Citation preview

第 23 卷第 2 期 系统仿真学报© Vol. 23 No. 2 2011年2月 Journal of System Simulation Feb., 2011
Http:∥www.china-simulation.com
• 242 •
神经网络辅助的组合导航系统仿真研究
王 旭 1,王 龙 1,2,刘文法 1,米 康 1 (1.空军工程大学工程学院,西安 710038;2.中国人民解放军 94836 部队,南昌 330201)
摘 要:针对高空长航时无人机(High Altitude and Long Endurance Unmanned Aerial Vehicle,
HALEUAV)的特点,提出一种 SINS/GPS/北斗/DVS 组合导航系统总体方案,并建立其联邦滤波器
模型。在分析常规联邦滤波局限性的基础上,研究了基于子系统精度变化的信息分配系数自适应修
正算法,设计了神经网络辅助联邦滤波的改进算法。仿真结果表明,改进滤波算法改善了数值计算
的稳定性及系统的容错性,有效提高了导航精度,系统可满足无人机的导航要求。
关键词:高空长航时无人机;组合导航;联邦滤波;信息分配
中图分类号:V249 文献标识码:A 文章编号: 1004-731X (2011) 02-0242-03
Simulation of Integrated Navigation System Aided by Neural Network
WANG Xu1, WANG Long1,2, LIU Wen-fa1, MI Kang1 (1. The Engineering Institute, Air Force Engineering University, Xi′an 710038 China; 2. The 94638th Unit of PLA, Nanchang 330201, China)
Abstract: According to the characters of the HALEUAV (High Altitude and Long Endurance Unmanned Aerial Vehicle), the integrated navigation system scheme about SINS/GPS/Bei-Dou/DVS was brought forward and its federal Kalman filter (FKF) model was established. Based on analysis of the disadvantages of the general FKF, the adaptive modification arithmetic of information sharing coefficient was researched based on the change of subsystems’ precision, and the neural network aiding FKF was designed. The simulation results indicate that the BP aiding FKF can provide improvements in filter stability, fault tolerance and navigation precision, and the navigation system can satisfy the demand of HALEUAV. Key words: HALEUAV; integrated navigation; federal filter; information sharing
引 言*
高空长航时无人机(HALEUAV)因飞行距离远、时间
长等特点,对其导航系统的精度、自主性及可靠性等提出了
更高的要求。任何单一的导航系统都有其弊端,无法同时满
足上述要求,因此,采用组合导航技术是提高导航系统整体
性能,解决该问题的有效途径。
目前,在各种组合方案中,由于惯性导航与卫星导航两
者性能上优势互补,而成为组合导航发展的一个重要方向[1]。
GPS 是一种高精度的全球三维实时卫星导航系统,但其控制
权在别人,卫星信号容易受人为因素干扰。因此,对于长航
时无人机而言,在 GPS 信号不可用时,必须要有替代的卫星
导航系统,以保证导航系统的整体性能。北斗双星导航系统
是我国自主研发的卫星导航系统,可完全为我所用,是比较
理想的替代卫星导航系统。此外,由于目前北斗系统只能提
供位置信息,不具备测速功能,所以为使系统有精确的测速
收稿日期:2008-10-29 修回日期:2009-01-20 基金项目:预研基金(9140A09050808JB3209) 作者简介:王旭(1957-),男,陕西武功人,博士,教授,研究方向为飞
行器总体及控制设计。
功能,同时具备更强的容错性,系统还需选取一定的导航设备
以供组合使用。多普勒雷达测速仪(DVS)是一种自主式导航
设备,不受高度限制,平均测速精度高,国外已将其用于远程
无人机导航,国内在有人机上的应用也较广。基于此,本文提
出了 SINS/GPS/北斗/DVS 组合导航系统总体方案,利用联邦卡
尔曼滤波器,保证高空长航时无人机导航精度全局最优。
1 组合导航系统总体方案设计
组合导航系统是以激光陀螺捷联惯导为参考系统,分别
与 GPS、北斗、DVS 组合,构成 3 个子滤波器。系统一般
工作在全组合模式下,这种工作模式的前提是 GPS 信号可
时间更新
最优融合
主滤波器
参考系统SINS
GPS
北斗系统
DVS
子滤波器2
子滤波器1
子滤波器3
1Z
2Z
1 1ˆ ,X P
2 2ˆ ,X P
11
ˆ ,g gX Pβ −
12
ˆ ,g gX Pβ −
ˆ ,m mX P1
m gPβ −
ˆgX
ˆ ,g gX P
3Z 3 3ˆ ,X P
13
ˆ ,g gX Pβ −
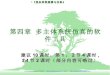
图1 联邦滤波器结构

第 23 卷第 2 期 Vol. 23 No. 2 2011 年 2 月 王旭,等:神经网络辅助的组合导航系统仿真研究 Feb., 2011
Http:∥www.china-simulation.com
• 243 •
用,其导航信息有效。系统采取故障检测手段,当发现GPS
输出的导航信息不可用时,则将GPS屏蔽,系统重构成SINS/
北斗/DVS组合导航模式,从而始终保证SINS/卫星子系统组
合工作的有效性,确保系统长时间工作的精度,提高其可靠
性。组合导航系统整体结构如图1所示。
2 联邦滤波器模型的建立
组合导航系统的任务是利用外部量测信息,精确估计出捷
联惯导系统的误差,并通过误差补偿,提供连续、实时、高精
度的位置、姿态及速度信息,以保证无人机自主导航的精度。
2.1 状态变量的选取及误差模型的建立
对 于 激 光 捷 联 惯 导 系 统 , 取 15 维 状 态 变 量
INS [ E N U E N U x y z x yX h v v vδϕ δλ δ δ δ δ ϕ ϕ ϕ ε ε ε= ∇ ∇ 15 1]Tz ×∇ ,
其中 δϕ 、 δλ 、 hδ 分别为经纬度和高度上的误差, Evδ 、
Nvδ 、 Uvδ 分别为东北天向的速度误差, Eφ 、 Nφ 、 Uφ 分别
为东北天向的平台误差角, xε 、 yε 、 zε 为 3 个轴向的陀螺
漂移, ( , , )i i x y z∇ = 为 3 个轴向的加速度计偏置。则根据
SINS 误差方程[2],可得其状态方程为:
INS INS INS INS INSX F X G w= + (1)
式中, INSF 为系统阵, INSG 为噪声分配阵, INSw 为系统噪声阵。 通过差分技术,影响 GPS 定位精度的 GPS 卫星误差、
传播误差等都可得到很好的补偿,其主要误差源是选择可用
性(SA)误差。在滤波器设计中,为避免状态变量维数过
高,一般采用一阶马尔科夫过程描述 SA 动力学特性。 选 择 GPS 接 收 机 的 状 态 变 量 为
GPS SA SA SA ESA NSA USA 6 1[ ]TX h v v vδϕ δλ δ δ δ δ ×= ,其中 SAδλ 、 SAδϕ 、
SAhδ 为反映在经纬度及高度上的误差, ESAvδ 、 NSAvδ 、
USAvδ 为东北天向的 SA 速度误差,则其状态方程可描述为:
GPS GPS GPS GPSX F X w= + (2)
式中, GPSF 为相关时间确定的系统阵, GPSw 为驱动白噪声阵。 北斗接收机随机误差建模方法与 GPS 类似,只是在参
数选取时应考虑北斗系统定位精度较 GPS 低的事实。 选 择 多 普 勒 雷 达 测 速 仪 的 状 态 变 量 为 DVSX
6 1[ ]Tdx dy dz dx dy dyv v v K K Kδ δ δ δ δ δ ×= ,其中 ( , , )diK i x y zδ = 为
DVS 的刻度系数误差,可用随机常数描述, ( , , )div i x y zδ = 为
由地形变化引起的测速误差,用一阶马尔可夫过程近似描
述。则其状态方程可描述为:
DVS DVS DVS DVS DVSX F X G w= + (3)
式中, DVSF 为相关时间确定的系统阵, DVSG 为噪声分配阵,
DVSw 为驱动白噪声阵。
2.2 子滤波器状态方程及量测方程的建立
(1) 子系统 1(SINS/GPS)
由式(1)、(2)可得其状态方程为:
INS INSINS INS INS
GPS 6 6GPS GPS GPS
0 0 0 0
T T T
T T T
F GX XF IX X
ωω×
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(4)
将 GPS 输出的位置、速度信息与 SINS 的相应输出相减,
可得其量测方程为: INS
1 1 GPS GPSGPS
[ ]X
Z H H VX⎡ ⎤
= +⎢ ⎥⎣ ⎦
(5)
式中, 1 6 6 6 9[ 0 ]H I × ×= , GPS 6 6[ ]H I ×= − , GPSV 为量测噪声阵。
(2) 子系统 2(SINS/北斗)
为降低滤波器维数,子系统 2 不把北斗系统的误差变量
引入状态方程,而只在量测方程中考虑其误差,则其状态方
程与式(1)相同。
记北斗系统东北天向的位置误差为 E∆ 、 N∆ 、 h∆ ,
则其量测方程为:
2 2 INS DS
( )( )cos
R h NZ R h E H X V
h h
δϕ ∆ϕδλ ∆
δ ∆
+ +⎡ ⎤⎢ ⎥= + + = +⎢ ⎥⎢ ⎥+⎣ ⎦
(6)
式中, 2 3 12[diag[ ( )cos 1] 0 ]H R h R h ϕ ×= + + 。
(3) 子系统 3(SINS/DVS)
根据式(1)、(3)可得其状态方程为:
INS INSINS INS INS
DVS 6 6DVS DVS DVS
0 0 0 0
T T T
T T T
F GX XF IX X
ωω×
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎣ ⎦ ⎣ ⎦
(7)
将 DVS 所测速度转换到导航坐标系,并与 SINS 的速度
信息相减,可得其量测方程为:
INS3 3 DVS DVS
DVS[ ]
XZ H H V
X⎡ ⎤
= +⎢ ⎥⎣ ⎦
(8)
3 联邦滤波的结构与算法
3.1 iβ 的自适应修正与全局最优估计
由图 1 可以看出,参考系统 SINS 的信息在输出给主滤
波器的同时,还输出给各子滤波器作为量测值,子系统的输
出只能给相应的子滤波器。各子滤波器将局部估计值 ˆ iX 及
其估计误差协方差阵 iP 输入主滤波器,并与之进行融合,以
得到全局最优估计[3]。此外,全局估计值 ˆ gX 及其协方差阵
gP 被放大为1
i gPβ −后,再反馈到子滤波器并重置其值,即:
ˆ ˆi gX X= ,1
ii i gP Pβ −= (9)
同时,主滤波器的协方差阵 gP 重置成1
m gPβ −。
若有局部估计值 ˆ iX 及相应协方差阵 iiP ,且各局部估计
互不相关,则系统全局最优估计可表示为: 3
1
1
ˆ ˆg g ii ii
X P P X−
=
= ∑ ,
131
1g ii
i
P P−
−
=
⎛ ⎞= ⎜ ⎟⎝ ⎠∑ (10)
显然,若 ˆ iX 的估计精度差,即 iiP 很大,则该子系统在
全局估计中的贡献 ˆ iPX 就较小。 通过上述分析可以得出,若子系统 i 的精度越差,其子
滤波器的信息分配系数 iβ 应越大,反之则应越小。 常规联邦滤波算法中, iβ 的值都是事先人为设定,但在
高动态的飞行过程中,组合导航系统工作环境十分复杂,各
子系统的性能在随时变化。例如,GPS 系统一般情况下精度

第 23卷第 2期 系统仿真学报 Vol. 23 No. 2 2011 年 2 月 Journal of System Simulation Feb., 2011
Http:∥www.china-simulation.com
• 244 •
较高,但在 GPS 卫星信号丢失时,其精度会明显下降。因
此,事先设定的 iβ 值不能实时地反映这些变化,从而影响
导航参数的估计精度。为了减小因分配系数 iβ 选取不当对
系统估计精度的影响,可通过提取反映各子系统实时精度的
协方差阵 iP 的迹 tr( )iP 来自适应修正 iβ ,其表达式为:
1
1,2,3, ,tr( ) ( , )
tr( ) tr( )
ii n
i mi
P i n mP P
β
=
= =+∑
(11)
式中,m为主滤波器,n为子滤波器数。从中可以看出, iβ 同
样满足“信息守恒”原理[4],即:
1
1n
i mi
β β=
+ =∑ (12)
3.2 联邦滤波的时间更新与量测更新
取组合导航系统的全局状态变量为: [ g EX h vδϕ δλ δ δ= ]T
N Uv vδ δ ,则全局和子系统的状态方程和量测方程为:
, , / 1 , 1 . 1
, , , ,1,2,3, ( )i k i k k i k i k
i k i k i k i ki g
X X WZ H X V
φ − − −=
= += +
(13)
其中, iW 、 iV 的协方差阵分别为 iQ 和 iR 。 采用上界方差技术[4]后,各子滤波器的时间更新和量测
更新可独立地进行,即各子滤波器的局部估计是不相关的。
滤波器量测更新方程为: 1
, , / 1 , / 1 , / 1i k i k k i k k i i i k kP P P H A P−− − −= − + (14)
式中 , / 1T
i i i k k i iA H P H R−= + , iR 为量测噪声方差阵。值得注
意的是,当 , / 1i k kP − 放大 1iβ − 倍后, ,i kP 应当按(9)式重置其值。
3.3 神经网络辅助联邦滤波算法
常规联邦滤波算法是基于严格的协方差估计,要求系统噪
声方差阵 Q 和量测噪声方差阵 R 己知,但对于组合导航系统而
言,其系统模型和噪声统计特性存在不确定性和非先验性,这
将导致联邦滤波器产生较大估计误差,甚至发散[5]。神经网络具
有高度的自学习能力,可以以任意精度逼近非线性函数,非常适
合模拟复杂的非线性系统。因此,可将联邦滤波器的估计能力和
神经网络的学习能力相结合,提高系统的自适应性和估计精度。
本文设计的BP 网络辅助联邦滤波的具体结构如图 2 所示。
kX, / 1 ,
ˆ ˆg k k g kX X− −
,g kK
,ˆ
g kX
, ,ˆ
g k g kE X X= −
图2 BP神经网络辅助联邦滤波器结构
BP 网络把全局状态变量的估计值 ,ˆ g kX 与其相对真值
,g kX 之间的误差设为输出量;将直接影响卡尔曼滤波误差
的参数[6],即增益矩阵 ,g kK 及状态变量一步预测与滤波估计
值之差( , / 1 ,ˆ ˆg k k g kX X− − )作为其输入量。
4 仿真结果分析 针对如上的系统描述及联邦卡尔曼滤波算法,首先设计
完整的无人机飞行轨迹,如图 3 所示,在此基础上,对组合
117118
119120
121 45 45.5 46 46.5 47 47.5
0
5
10
15
20
纬度/(o)经度/(o)
高度
/(km
)
图 3 无人机飞行轨迹 图 4 估计误差均方根
(a)航向角误差曲线 (b) 北向速度误差曲线 (c) 高度误差曲线
图5 组合导航系统仿真结果
1000 2000 3000 4000 5000 6000 time/s
δψ(')
4
2
0
-2
-4
-6
-8 1000 2000 3000 4000 5000 6000
time/s1000 2000 3000 4000 5000 6000
time/s
0.4
0.2
0
-0.2
-0.4
v_n(
m/s
)
30
20
10
0
-10
-20
δh(m
)
(下转 251 页)

第 23 卷第 2 期 Vol. 23 No. 2 2011 年 2 月 卢睿, 等:一种求解反应式项目调度问题的启发式方法 Feb., 2011
Http:∥www.china-simulation.com
• 251 •
标有较大的差异。而随机串行 SGS 的求解结果较差。
图 4 列出两组调度结果。分别表示在一次反应式调度
中,执行 ILS 启发式过程前后的方案集合中调度方案的目标
值和项目的工期。两个方案集合中各包含 6 个方案,均以目
标值从小到大排列,标号相同的方案之间没有对应关系。ILS
执行后的方案集合的目标值明显优于执行前的方案集合,特
别是最优方案有显著改进。
4 结论
本文从项目执行的不确定性以及项目进度控制的角度
研究了加权提前-拖期惩罚费用问题。传统的 SSGS 不适合
求解随机项目调度问题,因此本文采用了符合随机性特点的
SGS。并且提出了 ILS 启发式求解方法,采用两种策略设计
了 4 种局部搜索方法,以及 2 种摄动方法,以寻求更大邻域
范围内的更优解,并加强跳出局部最优的能力。仿真实验表
明,ILS 方法可以有效地提高反应式调度中解的质量。并且
通过反应式调度的实验发现,SGS 和优先级策略的选择会给
解的性能造成影响。
参考文献: [1] Herroelen W, Leus R. Robust and reactive project scheduling: a
review and classification of procedures [J]. International Journal of Production Research (S0020-7543), 2004, 42(8): 1599-1620.
[2] Neumann K, Schwindt C, Zimmermann J. Project scheduling with time windows and scarce resources [M]. Berlin, Germany: Springer,
2003. [3] Vanhoucke M, Demeulemeester E, Herroelen W. An exact procedure
for the resource-constrained weighted earliness-tardiness project scheduling problem [J]. Annals of Operations Research (S0254-5330), 2001, 102(1): 179-196.
[4] Schwindt C. Local search for project scheduling with convex objective functions [C]// The Seventh International Workshop on Project Management and Scheduling. Osnabrück, Germany: Springer, 2000: 239-241.
[5] Schwindt C. Minimizing earliness-tardiness costs of resource- constrained project [C]// Operations Research Proceedings 1999. Berlin, Germany: Springer, 2000: 402-407.
[6] Ballestin F, Trautmann N. A metaheuristic approach for the resource-constrained weighted earliness-tardiness project scheduling problem [C]// Tenth International Workshop on Project Management and Scheduling. Poznan, Poland: Springer, 2006: 56-62.
[7] Ballestin F, Trautmann N. An interated-local-search heuristic for the resource-constrained weighted earliness-tardiness project scheduling problem [J]. International Journal of Production Research (S1366-588X), 2008, 46(22): 6231-6249.
[8] Van de Vonder S, Ballestin F, Demeulemeester E, Herroelen W. Heuristic procedures for reactive project scheduling [J]. Computer & Industrial Engineering (S0360-8352), 2007, 52(1): 11-28.
[9] Hartmann S. A self-adapting genetic algorithm for project scheduling under resource constraints [J]. Naval Research Logistics (S1520-6750), 2002, 49(1): 433-448.
[10] Kolisch R. Project scheduling under resource constraints: efficient heuristics for several problem classes [M]. Heidelberg, Germany: Physica, 1995.
(上接第 241 页)
[5] White J H. Self-linking and the Gauss integral in higher dimensions [J]. Amer. J. Math. (S0002-9327), 1969, 91(3): 693-728.
[6] Benham C J. Theoretical analysis of conformational equilibria in superhelical DNA [J]. Ann. Rev. Biophys. Chem. (S0084-6589), 1985, 14: 23-45.
[7] Westcott T P, Tobias I, Olson W K. Modeling self-contact forces in the elastic theory of DNA supercoiling [J]. J. Chem. Phys. (S0021-9606), 1997, 107(10): 3967-3980.
[8] 刘延柱 . 弹性细杆的非线性力学[M]. 北京: 清华大学出版社 ,
2006. [9] S S Antman. Nonlinear Problems of Elasticity [M]. New York, USA:
Springer-Verlag, 1995. [10] C Canuto, M Y Hussaini, A Quarteroni, T A Zang. Spetral Methods
[M]. USA: Springer, 2006. [11] J Huang, J Jia, M Minion. Arbitrary order Krylov deferred correction
methods for differential algebraic equations [J]. J. Comp. Phys. (S0021-9991), 2007, 221(2): 739-760.
[12] S A Orszag. Spectral methods for problems in complex geometries [J]. J. Comput. Phys. (S0021-9991), 1980, 37: 70-92.
(上接第 244 页)
导航系统进行仿真。为验证神经网络辅助联邦滤波算法的有
效性,本文给出了如图 4 所示的估计误差均方根对比曲线,
由图可以看出,改进算法保证了系统稳定且精度优于常规联
邦滤波。此外,假定在 3500~4500 秒时间段内 GPS 信号中
断,组合导航系统的部分仿真结果如图 5 所示。
从图5可以看出,GPS信号中断时,导航系统精度损失
不大且能在SINS/北斗/DVS组合模式下有效工作,具备较好
的容错性,仿真过程滤波未出现发散,系统精度、可靠性均
可满足高空长航时无人机导航系统的性能要求。
参考文献: [1] 顾启泰, 刘学斌. 近代制导、导航和控制系统的发展[J]. 导航,
1998, 34(1): 3-7. [2] 张宗麟. 惯性导航与组合导航[M]. 北京: 航空工业出版社, 2000,
195-199. [3] Mohamed A. Adaptive Kalman Filtering for INS/GPS [J]. Journal of
Geodesy (S0949-7714), 1999, 73(4): 48-51. [4] 秦永元. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出
版社, 1998: 194-199. [5] 顾启泰. 联邦滤波器信息分配系数的优选算法[J]. 中国惯性技术
学报, 2003, 15(6): 36-39. [6] Chin L. Application of neural network in target tracking data fusion
[J]. IEEE Trans on Aerospace and Electronic Systems (S0018-9251), 1994, 30(1): 281-287.