Embed Size (px)
Citation preview

Ch 3.2 p.1
Environmental Modeling and Decision Support Systems
Prof. Dr. Struss, Dr. Dressler
Chapter 3.2 Numerical models
This chapter presents some of the “classical” numerical models used in ecology and discusses the utility, but also their shortcomings and limitations of numerical models. The models that will be presented attempt to capture certain factors that have an impact on the population size of a species.
Evolution of a population
Population can be defined as a set of individual organisms of one species, inhabiting a certain area (or space). Intuitively, a species it is a class of organisms or individuals that have some common characteristics or qualities. Defining the concept of a species and determining the boundaries between different species is difficult, and there is no agreed answer. One wide-spread definition is that the organisms of one species can breed together and produce fertile descendants.
The term individual at a first glance seems to be more obvious - but only as long as we think of humans and the animals that we usually see around us, such as mammals, birds, insects. Here, the organisms are well determined. Their structure and development is determinate, starting from their origin. They are called unitary organisms.
For modular organisms, e.g. herbs, fungi, coral, this is quite different. Their development and their structure, which involves a changing configuration of modules (e.g. leaves, coral polyps, etc.), is more varying and indeterminate. The number of trees in a forest is not a good characterization of the tree population without further information about stage of development etc.
Figure 3.2.1 What are “individuals”?

Ch 3.2 p.2
Influences on population size
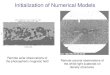
Population size is the number of individual organisms of a population in a particular area. As it shown in Figure 3.2.2, population size is influenced by: 1. Birth, 2. Death 3. Immigration: individuals moving into the area 4. Emigration: individuals moving out of the area.
Figure 3.2.2 Influences on population size
Life history of unitary organisms
Unitary organisms grow in sequence of phases. The basic pattern includes a juvenile phase, which is a phase of growth of individual organisms, the reproductive phase and a post-reproductive phase. In the juvenile period, individual organisms grow into adults and finally become reproductive. They produce their descendants in the reproductive phase. After this period, they go into post-reproductive phase and die. Figure 3.2.3 illustrates the reproductive output in different phrases of unitary organisms.
Figure 3.2.3 Life history of unitary organisms
Motion of organisms
There are different types of motion of (groups of) individuals. Dispersal is the motion of individuals of a species relative to each other within an area (as opposed to migration between areas). Hence, dispersal changes the distribution of the individuals in the area, but does not change the population size since the individuals stay in the considered area. Individuals may move away from their parent organism, such as the seeds of trees, male elephants with respect to the herd. Dispersal also affects spatial distribution like flying taraxacum. Dispersal of organisms can be density-dependent. Individuals may move away from high density because of declining resources, or they move away from low density to avoid inbreeding. Migration, on the other hand, is directed mass movement of individuals between different areas. For example, if the original area is lacking water, the elephant herd may move to an (actually often quite distant) area with water resources; Else try to return Sargasso Sea to lay eggs. Migration does have an

Ch 3.2 p.3
impact on population, and often individuals migrate away from the declining resource or to areas for mating.
Qualitative types of life histories
Plants and animal species reproduce at least once in their lifetime. Some species perform repeated breeding (reproduce), such as humans, carabid beatles, and oak trees. Species that reproduce multiple times are called iteroparous species. Iteroparous species can be devided into types: seasonal iteroparous species, which will reproduce by season cycles, such as mice or birds. Continuous iteroparous species that independent of season, such as humans. Other species, on the other hand, only reproduce once are called semelparous species. In general, iteroparous species are more common than semelparous species.
Figure 3.2.4 Qualitative types of life histories
Population growth with intraspecific competition
We start with a model of population in which there is no competition among the individuals of a species and then incorporate that competition later. Population growth is the change in population over time, and here, we assume that it can be quantified as the change in the number of individuals in a population using “per unit time” for measurement (which is appropriate for unitary organisms). Let N be the number of individuals in population, N(t) defines the population function over time, dN/dt is the population change over time. Our models are in the form of differential equations, describing the net rate of increase of a population, which is denoted by dN/dt.
This represents the speed at which a population changes in size N, as time t progress. The increase in size of the whole population is the sum of the contributions of the various individuals. The respective per capita (per head) rate of increase is given by dN/dt x (1/N). In absence of intra-specific competition (or any other force that increases the death rate or reduces the birth rate) this rate of increase is a constant and as high as it can be for the species concerned. It is called the intrinsic rate of natural increase and is denoted by r. Thus :
dN/dt (1/N) = r ,
and the net rare of increase for the whole population is therefore given by:

Ch 3.2 p.4
dN/dt = rN
This equation describes a population growing exponentially (Figure 3.2.5).
Figure 3.2.5 Growth of population
An unlimited exponential growth cannot happen in reality. If we confront such a model with some (hypothetical) observed population changes of trout as in Figure 3.2.6 – can we say that the data confirm the model? – We will get back to this question.
Figure 3.2.6 Observed population of trout
Population growth with intraspecific competition
Since the resources are limited, the members of a growing population will compete with each other for these certain resources, such as food, water, light, space, safe sites, or mates. This is called intraspecific competition. It may take on different forms. Individuals may fight for resources, be chased away, die of starvation, or move out to a new place with enough resources. And it may also influence the production of offspring by female.

Ch 3.2 p.5
Intra-specific competition needs to be be added to the model. This is done by deriving the logistic equation, using the method set out in Figure 3.2.7. The net rate of increase per individual is unaffected by competition when N is very close to zero, because in this case, there is no shortage of resources. It is still therefore given by r. When N approaches K (the capacity that can be supported by the available resources), the net rate of increase per individual is approaching zero. For simplicity, we assume a linear reduction in the per capita rate of increase, as a result of intensifying competition, between N=0 and N=K.
Thus, on the basis that the equation for any linear function takes the form y = intercept + slope x, where x and y are the variates on the horizontal and vertical axes, here we have:
dN/dt(1/N) = r - (r/K)N
or rearranging,
dN/dt = rN[1-(N/K)]
This is the logistic equation, and a population increasing in size according to it is shown in Figure 3.2.7. It describes a sigmoidal or S-shaped growth curve asymptotically approaching a stable carrying capacity, but it is only one of many reasonable equations that do this. Its major advantage is its simplicity.
Figure 3.2.7 Logistic equation
Intraspecific Competition
Intraspecies competition can be indirect, via resource depletion, for example, the grass eaten by an elephant cannot be eaten by others, and we call this exploitation competition. And on the other hand, competition can be direct, actively, by fighting, it is called interference competition. The levelling of population growth at high densities (known as density-dependent inhibition) can be seen as an effect of intraspecific competition. Indeed, whereas at low densities organisms do not compete for resources because each individual has enough resource, at higher densities resources become limiting, and the population size can no longer increase.
"Capturing the essence of ecological processes”
“ … a pattern generated by such a model … is not of interest, or important, because it is generated by the model. … Rather, the point about the pattern is that it reflects important, underlying ecological processes – and the model is useful in that it appears to capture the essence of those processes.”(Townsend et al., Essentials of Ecology)

Ch 3.2 p.6
Criticism: While we fully agree with the requirement that a model and the predictions generated by the model should "capture the essence of those processes", we doubt that this is met by the numerical models and its results alone. Model like this dN/dt = rN*[1 – (N/K)] may "reflect" the processes, but the essential concepts remain implicit in this model: “birth”, “competition”,”death” and their contributions are not visible. This also means, that no reasoning about these concepts and processes can be performed by a computer-based modeling system.
Extracting models from data
We also need to reflect the utility of empirical numerical data. Let us assume we have data about the evolution of trout over time, as in Figure 3.2.8. The pure data in themselves do not represent a model. For instance, without further assumptions, the data do not produce any prediction, even not that the same data will ever be seen again. If we intend to generate a model from these data, this is an active step to be performed by us, e.g. by fitting a curve. There are infinitely many possibilities including the ones shown. How can we decide which is the "correct" one? Linear, exponential or S-shape? The question itself is actually incorrect. Collecting similar data in different rivers, would derive different data sets. There is no "true" solution in the sense of one curve that matches all data sets in an optimal way. Furthermore, what we consider a plausible generalization from the data depends on the understanding and knowledge of the respective ecological problem. For instance, we would refute a linear or exponential development as a global solution for principled reasons, because we know that there must be limits to N.
Conclusion: qualitative properties of models and their predictions are much more essential to judging about their appropriateness than just numerical proximity.
Figure 3.2.8 Observed populations
More competition…
There exists not only intraspecific competition, but also the competition between individuals of different species, that is interspecific competition. This does not exclusively relate to food (like trout and galaxias compete for invertebrates), also water or other resources. How to build an appropriate model? We reconsider dN/dt = rN*[1 – (N/K)], which reflects intraspecific competition.
Lotka-Volterra Model of interspecific competition
Assume there are two species with size N1, N2. We cannot simply replace N by N1 + N2 in dN/dt = rN*[1 – (N/K)]. In different species, the competition effect can be asymmetric, like the competition between hyena and vulture, vulture and jackal. Let r1,r2 be the growth rates, and K1,K2 the capacity of the two species in the environment. Set a12 to be competitive coefficient, which expresses that a12 individuals of species 1

Ch 3.2 p.7
have same competitive effect as one individual of species 2. N can then be replaced by N1 + a12N2, which combine intra- and interspecific competition. We obtain:
dN1 /dt = r1N1 (1 – [N1 + a12N2]) / K1
dN2 /dt = r2N2 (1 – [N2 + a21N1]) / K2 ,
which is the Lotka-Volterra model of interspecific competition.
Note that a12 < 1 means that individuals of species 2 have less inhibitory effect on individuals of species 1 than individuals of species 1 have on others of their own species.
Population change from Lotka-Volterra
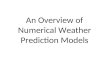
One way to appreciate the properties of this model is to ask the question, “under what circumstances does each species increase or decrease in abundance?”. In order to answer, we construct diagrams in which all possible combinations of N1 and N2 can be displayed. This has been done in Figure 3.2.9. Points in this space imply increases or decreases in species 1 and species 2. It follows inevitably that there must also therefore be a so-called zero isocline for each species: that is the set of all points where there is no change in N1 and N2, resp., which separates areas of increase and decrease.
The isoclines and the regions of increase and decrease are depicted in Figure 3.2.9 left for species. It is determined by the fact that the zero isocline is characterized by a zero derivative, i.e. dN1/dt = 0 (the rate of change of species 1 abundance is zero, by definition). Rearranging the equation, this yields:
r1N1 (K1 - [N1+a12N2]) = 0
K1-N1-a12=0
N1 = K1 - a21N2
To the left of this curve (which is a straight line), species 1 increases in abundance (arrows in the figure, representing this increase point from the left to right, since N1 is on the horizontal axis). It increases because numbers of both species are relatively low, and species 1 is thus subjected to only weak competition. Above and to the right of the line, however numbers are high, competition is strong and species 1 decreases in abundance ( arrows from right to left). Based on an equivalent derivation, Figure 3.2.9 right graph shows the species 2 zero isocline, with arrows, like the N2 axis, running vertically.
Figure 3.2.9 Isoclines and regions of increase and decrease of the population sizes

Ch 3.2 p.8
Result of interspecific competition
By superimposing the two diagrams, we obtain a global picture of the entire system, i.e. the development of the two populations. But the result of this superposition depends on the relative positions of the zero isoclines. There are four cases of these relative positions, dependent on the different parameters that determine the intersection with the two axes.
Case 1: Figure 3.2.10, for instance, represents the case K1 > K2*a12 and K1*a21 > K2
The first inequality indicates that the inhibitory intraspecific effects that species 1 can exert on itself (denoted by K1 ) are greater than the interspecific effects that species 2 can exert on species 1 (K2a12). This means that species 2 is a weak interspeicfic competitor. The second inequality indicates that species 1 can exert more of an effect on species 2 than species 2 can on itself. Species 1 is thus a strong interspecific competitor; and as the arrows in Figure 3.2.10 show, species 1 will eventually drive the weak species 2 to extinction and attains its own carrying capacity. In this case, intraspecific competition within species 1 is more effective than interspecific competition exerted by species 2.
Figure 3.2.10 Competition:K1 > K2*a12 and K1*a21 > K2
The other cases are described by
K1 < K2*a12 , K1*a21 < K2
K1 > K2*a12 , K1*a21 < K2
K1 < K2*a12 , K1*a21 > K2
and shown in figure 3.2.11

Ch 3.2 p.9
Figure 3.2.11
Case 2: K1 < K2a12 and K1a21 < K2
The situation in Figure 3.2.11(left graph) is the dual one to case 1. They both describe the environment is such that one species invariably eliminates the other oe, because the first is a strong interspecific competitor and the other one weak.
Lotka-Volterra: Weak Interspecific Competition
Case 3: K1 > K2a12 and K1a21 < K2
In this case, both species have less competitive effect on the other species than those other species have on themselves; in this sense, both are weak competitors. This would happen, for example, if there were niche differentiation between the species - each competed mostly 'within' its own niche. The outcome, as Figure 3.2.12 shows, is that all arrows point towards a stable, equilibrium combination of the two species, which all joint populations there tend to approach: that is, the outcome of this type of competition is the stable coexistence of the competitors.
Figure 3.2.11.2 Competition:K1 > K2a12 and K1a21 < K2

Ch 3.2 p.10
Lotka-Volterra: Strong Interspecific Competition
Case 4: K1 < K2a12 and K1a21 > K2
Finally, in this case, individuals of both species have a greater competitive effect on individuals of the other species that those other species do on themselves. This will occur, for instance, when each species is more aggressive toward individuals of its own species. The directions of the arrows are rather more complicated in this case, but eventually they always lead to one or other of two alternative stable points (Figure 3.2.11.3). At the first, species 1 reaches its carrying capacity with species 2 extinct; at the second, species 2 reaches its carrying capacity with species 1 extinct. In other words both species are capable of driving the other species to extinction, but which actually does so depends on the initial conditions, i.e. which one starts with a relatively higher density.
Figure 3.2.11.3 Competition:K1 < K2*a12 and K1*a21 > K2
Predation and grazing
A predator may be defined as any organism that consumes all or part of another living organism thereby benefiting itself, but reducing the growth, fecundity or survival of the prey. Within the broad definition, three main types of predators can be distinguished, True predators: Kill prey and consume prey items, e.g. lions, tiger etc; Grazers: Do not usually kill prey, consume only part of prey item, e.g.cattle, sheep etc; Parasites: do not kill prey, consume part of each prey item, e.g. tapeworms, tuberculosis bacterium etc. The predators obtain the resources they need, reducing either fecundity or the chances of survival of individual prey and may therefore reduce prey abundance. Grazers and parasites may make prey more vulnerable to other forms of mortality.
Predator-prey model – prey
“The predator-prey model is the model between different species, in which one is another’s recourse. In general, prey concerns resource organism, not only animals, but also plants. Depending on their specific settings of applications, they can take the forms of resource-consumer, plant-herbivore, parasite-host, tumor cells (virus)-immune system, susceptible-infectious interactions, etc” (Frank Hoppensteadt (2006), Scholarpedia).

Ch 3.2 p.11
Let N be the population size of the prey, i.e. we assume the exponential growth if there is no predation: dN/dt = rN. In addition, we also need a term expressing that prey individuals are removed from the population by predators. They will do so at a rate that depends on the frequency of predator-prey encounters, which will increase with increasing number of predators(P) and prey(N). The exact number encountered and consumed, however, will also increases with searching and attacking efficiency of the predator, denoted by a. The consumption rate of prey will thus be aPN, and overall, we get the function:
dN/dt = rN – aPN (1)
where rN is natural growth, aPN is death by predation.
Predator-prey model – predator
Assume the predator with exponentially decline without food, dP/dt = -qP. where q is their mortality rate. But this is counteracted by predator birth, the rate of which is assumed to depend on (i) the rate at which food is consumed, aPN and (ii) the predator's efficiency, f, of turning this food into predator offspring. Overall, we get the function:
dP/dt = faPN – qP (2)
faPN contribute to the growth of the population.
Lotka-Volterra Predator- prey model
Equation 1 and 2 constitute the lotka-Volterra model. Figure 3.2.12 is the model of these two equations. Again, the properties of this model can be investigated by finding zero isoclines. There are separate predator and prey zero isoclines, both of which are drawn on a graph of prey density (x-axis) against predator density (y-axis). The prey zero isocline joins combination of predator and prey densities that lead to an unchanged prey population, dN/dt = 0,while the predator zero isocline joins combinations of predator and prey densities that lead to an unchanging predator population, dN/dt = 0.
In the case of the prey, we 'solve' for dN/dt = 0 in equation 1, giving the equation of the isocline as:
P = r/a
Thus, since r and a are constants, the prey zero isocline is a line for which P itself is a constant (Figure 3.2.12 left): prey increases when predator abundance is low (P < r/a) but decreases when it is high (P > r/a).
Similarly, for the predators, we solve for dP/dt =0 in equation 2, giving the equation of isocline as
N = q/fa
The predator zero isocline is therefore a line along which N is constant (Figure3.2.12 right) : predators decrease when prey abundance is low (N< q/fa) but increases when it is high (N > q/fa)
Above the isoclines P, prey are eaten or killed by predator, below this line, population of prey is increase. The left side of isolines N means prey is fully abundant, predator grow up. See Figure 3.2.12.

Ch 3.2 p.12
Figure 3.2.12 Lotka-Volterra Predator-Prey model
As before, by superimposing the two diagrams, we determine the overall behavior, shown in Figure 3.2.13, which indicates how the vectors of the individual diagrams combine to give a vector that indicates the evolution of (N, P). It shows the behavior of joint populations. The various combinations of increases and decreases, listed above mean that the populations undergo 'coupled oscillations' or 'coupled cycles'. in abundance; 'coupled' in the sense that the rises and falls of the predators and prey are linked, with predator abundance tracking that of the prey.
Figure 3.2.13 Overall Behavior
It is important to realize, however, that the model does not 'predict' exact patterns of abundance that it generates. The world is much more complex that imagined by the model. But it does capture the essential tendency for coupled cycles in predator-prey interaction. Again, the qualitative property of the solutions (cyclic behavior) is what matters.
Population dynamics of predation
There is an underlying tendency for predators and prey to exhibit cycles in abundance, and cycles are observed in some predator-prey and host-parasite interactions. However, there are many important factors that can modify or override the tendency to cycle.
Crowding of either predator or prey is likely to have a damping effect on any predator-prey cycles.
Many population of predators and prey exist as a 'meta-population'. In theory and in practice, asynchrony in population dynamics in different patches and process of dispersal tend to dampen any underlying population cycles.

Ch 3.2 p.13
Algal bloom
In the water treatment example introduced before, the modified pH was found to be the effect of a previous algal bloom, i.e. is a rapid increase in the population of algae in an aquatic system (due to an abundance of the nutrients in the water). Actually, there exist numerical models for this phenomenon, and we will discuss one example in order to highlight the deficiencies and limitations of numerical modeling.
A numerical model of algal bloom
This numerical model of algal bloom was developed by Dutch researchers based on their observation of the phenomenon in the North Sea.
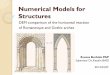
Numerical model of algal bloom
The variables in this model have the following meaning: P is the production rate of algal. Pmax,20 is the maximal production rate at 20°C. D is the length of the day. ls is the intensity of light at saturation of growth. I0 is the intensity of light at surface. is temperature coefficient. ε is light reduction coefficient. H is depth of water.
Model re-use and adaption – requirements
Figure 3.2.14 Numerical_model_of_algal_bloom2

Ch 3.2 p.14
If, for instance, we want to use a model of algal bloom in the context of our Brazilian project, it would be good to know whether we can use this model, or a revision thereof. It is likely that there are differences, such as the salinity of the water, the temperature level, the amount of nutrients in the water, the algae species. But still, perhaps, parts of the model may be reused, adapted or complemented. How can we find out? We would have to decompose the model into elementary fragments: after some "reversed engineering", we see “model fragments” capturing the influence of light-duration, temperature, depth, and light-intensity. As a result, we structure the model based on the concepts behind its different mathematical fragments, i.e. related to real world, such as the influences of light and temperature. In order to decide, whether we can reuse these fragments, we need to be aware of the preconditions and modeling assumptions underlying the specific form of these model fragments, such as: how is the turbidity in the water, e.g. based on the amount and distribution of suspended solids, and the distribution of temperature below the water surface? (How) is the impact of wind and waves reflected? An important precondition for the whole phenomenon to occur is not even represented in the formula: the presence of nutrients. Furthermore, there are preconditions or limits of applicability that are obvious (to humans) and, hence, not even mentioned, such as the temperature should above 0 degrees, etc.
Ecological modeling- requirements
Conclusions:
- A conceptual model is required for establishing and re-using models.
- Every numerical model is only an approximation.
- A qualitative model that reflects the qualitative nature of available knowledge and information is essential
- Re-use of models based on model libraries requires solutions to compositional modeling.