Embed Size (px)
Citation preview

154
CHAPTER 5
A LOW POWER CMOS ANALOG FRONT END FOR
BIOMEDICAL ACQUISITION
5.1 INTRODUCTION
The demand for low power and small size biopotential acquisition
system is increasing now more than ever. Highly integrated application
specific circuits (ASICs) in bioelectric data acquisition systems poses new
insights into the origin of light-weight, low-power, low-cost medical
measurement devices that allow long-term studies. There is significant cost
reduction in medical care, as patients need not be hospitalized for observation
and can become mobile as pointed by Refet et al (2009). Thus, the
development and successful implementation of a universal ASIC, which
meets the specifications like long term power autonomy and high signal
quality of broad variety of biopotential signals continues to pose a challenge.
A cost-effective approach uses state of the art microelectronics in medical
measurement equipment, replacing the presently available discrete, single
application devices (Fuchs et al 2002).
In biomedical instrumentation, the crucial and power consuming
block is the analog front end which consists of low noise pre amplifiers and
low pass filters. Low frequency filters are the major building blocks in any
biomedical system. Most commonly used biomedical signals like ECG, EEG,
EMG are low amplitude signals with frequencies ranging within 10KHz. ECG
is the graphical recording of the bioelectric signals representing the electrical

155
activity of the heart. In heart rate measurements, the weak signal (amplitude
less than a few millivolts) has to be amplified first and filtered for further
processing. Low voltage operation is critical design issue for achieving low
power consumption. Low power and low voltage are the two important
attributes that is addressed in circuits used for ECG, to achieve a long battery
life. Since the average power consumption of CMOS digital circuits is
proportional to the square of the supply voltage, digital circuit benefits from
the scaling and reduced supply voltage of the analog circuits helps to achieve
increased speed and reduced power consumption as described in Lasanen and
Kostamovaara (2005). In this case, the analog front-end circuit acts as the
interface between physical signals and digital processor and helps in
bioelectrical signal acquisition.
As it is briefly described above, this study aims at designing analog
front end to perform preprocessing for heart activity detection. The analog
front end employs a fully differential OTA and single ended folded cascode
OTA as preamplifiers and a second order filter built using these OTA’s as low
pass filter, for signal processing. The amplifier designed concentrates on the
ECG signal extraction with high gain, CMRR and low noise. The filters
realized using these OTA’s help in sensing and continuous time filtering of
the bioelectric signals.
The architecture and design procedure of various fully differential
and single ended OTA’s are detailed in Chapter 2. The OTA’s discussed in
this work are applied with biomedical signals and present a linearity approach
to implement the OTA-C filter system (Ng and Chan 2005).
5.2 FULLY DIFFERENTIAL (FD) OTA
The preamplifier is designed using an operational transconductance
amplifier (OTA) for the acquisition of cardiac signals which, typically are in

156
the range of 50 V to 8 mV while the frequencies are below 250 Hz. In
analog integrated circuits, differential circuits are preferred to single ended
structure because it improves noise and reduces distortion. The other
advantage is that any amount of noise or power supply ripple tends to appear
as common mode signal and gets cancelled in differential processing. Also,
the non linearity of the active device is doubled when used in a differential
fashion. For example, the MOS transistor is a square law device, whose
second order nonlinearity for a voltage v can be given as
I = g v + g v (5.1)
g1 and g2 are coefficients expressing non linearity and I is the current of the
square law device. However, applying the differential signal v+ as +v and v- as
–v, the current equation is obtained as
i = g (+v) + g (+v) and i = g ( v) + g v) (5.2)
The output is obtained by taking its difference,
i = i i = 2g v (5.3)
Thus, this mode not only cancels the nonlinearity, but also doubles
the linear part of the signal. In this OTA, small transconductance value is
maintained using current division and current cancellation techniques. (gm,
typically of the order of a few nano amperes per volt). A fully differential
circuit is chosen to provide a good dynamic range rather than single ended
structure since dynamic range is related to the power consumption. The
common mode rejection is high and so, the noise is reduced in the differential
circuit. Common mode feedback circuits are used suitably for continuous data
applications to regulate the common mode output of the OTA and to provide
good tuning capability to the filter.

157
5.2.1 Structure of OTA
OTA’s are voltage to current converters that generate huge
harmonic distortion components. Hence it is necessary to linearise the OTA
circuits. A transistor with large saturation voltages, with very low distortion,
is one choice to design linearised voltage to current converters. Since, the
OTA is being used in for low frequency applications. OTA also requires low
transconductance value for its design. The devices in the OTA are operated in
subthreshold region to obtain low transconductance. Various OTA based
continuous time filtering circuits stated in Solis et al (2000), Veeravalli et al
(2002), Salthouse Sarpeshkar (2003), Rodriguez et al (2004), use open loop
OTA-C integrators operating in subthreshold region to achieve low
transconductance and power. Also, current division and current cancellation
techniques are employed to lower the transconductance of the OTA circuit as
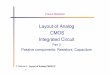
shown in Figure 5.1. Thus the OTA yield a low transconductance with good
linearity as proposed by Shuenn-Yuh and Chih-Jen (2009).
Figure 5.1 Fully differential OTA for Low Frequency Applications

158
In the OTA, transistors MM, M1 ,MN and MM,’ M1
’, MN’ act as
source followers where the differential input voltage is converted to current
by transistors MR and MR’ that are biased in edge of moderate inversion
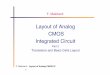
region and triode region respectively. The conductance in the MOSFET in the
sub threshold region increases linearly with ID, while in the strong inversion
region the conductance increases as the root of ID, which can be understood
from Figure 5.2 (Jacob et al 1997).
Figure 5.2 Drain Current plotted from Weak inversion to Strong inversion
The drain current of MR transistor is split into transistors MM, M1
and MN where MM transistor is responsible for current division and MN for
current cancellation. The transconductance ratio between MM, M1, and MN is
M: N: 1.The transistors MM, M1, and MN are biased near the weak inversion
region. The remaining transistors work in sub threshold region and help in
attaining low transconductance with very good linearity. The channel current
equation for these transistors is given by the following equation
I = I e e (5.4)
Most of the current in the circuit flows to ground through MM
transistors because the transconductance of MM transistor is greater than that

159
of M1 and MN transistor. (gmMM>> gmM1, gmMN) . Thus the small signal
transconductance is given as
G =i
(v v )=
NM + N + 1
g (5.5)
Where g0MR is the small signal drain–source conductance of transistor MR,
given by
g = CWL
(v V V ) (5.6)
Here M can be defined as the ratio of transconductance between
MM and M1; N is the ratio of transconductance between MN and M1, p is the
mobility of the carriers in the channel and Vt is the threshold voltage of the
transistor, respectively. VgsMR is the source to gate voltage of MR, and WMR
and LMR are the gate width and the gate length of MR, respectively. The small
signal model of the differential circuit is shown in Figure 5.3.
Figure 5.3 Small Signal Model of the Fully Differential OTA

160
In case of low frequency applications, it is desirable that ac small
signal transconductance is low. So, the M and N ratios are adjusted to lower
the ac small signal transconductance g0MR. It is desirable to keep gmMM
>>5g0MR to reduce harmonic distortion components in the circuit. Due to
current division effect, noise contributions by transistors MBP, MM, and MR
are very small and so, noise performance gets improved. But still the effect of
noise from M1, MN, and MBN transistors would be present, and thus can be
reduced by increasing the length of the transistors. Also in the case of low
frequency applications, p-channel transistors are used as input transistor to
keep low the flicker noise. The design values are given in Table 5.1.
Table 5.1 Design Parameters of the Fully Differential OTA
Transistor numbers W/LMM, MM’ 5 m/0.18 mMN, MN’ 2.5 m/0.18 m
M1, M1’, MR, MR’,MC 0.18 m/0.18 mMBP,MBP’ 100 m/0.18 m
MCP 20 m/0.18 mMBN,MBN’ 0.67 m/0.6 m
MCN 1 m/0.18 mVbp 0.4V
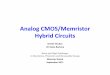
5.2.2 Common Mode Feed Back Circuit
The common mode feedback circuit used for the fully differential
OTA is shown in Figure 5.4. The MOS transistors MF1, MF6, MF4, and MF5
form two different structures to sense the common mode level. The outputs
from the OTA are given as inputs cm1 and cm2 to the transistors MF1 and
MF4. The common mode voltage VC is given as inputs to the common mode
gate terminal of transistors MF6 and MF5.

161
Figure 5.4 CMFB Circuit with N-MOS Diode Connected Transistor load
Then differential structures compare the output voltages of OTA
with common mode voltage VC. If output common mode voltage is not equal
to the reference voltage, a corrected current would be set by transistor MF3 to
the load transconductor. Then, the output common mode voltage is adjusted
to desired output voltage. The output from the Vfb terminal is given as
feedback to the N-MOS current sink transistors of the OTA circuit. The
design parameters of the circuit are shown in Table 5.2. The main advantage
of continuous time CMFB is that they do not require a circuit for generation
of non overlapping clock and work in continuous domain. So, the continuous
time CMFB circuits would be suitable for high performance applications and
for continuous data circuits (Behzad Razavi 2002).
Table 5.2 Design Parameters of CMFB Circuit
Transistor numbers W/L
MF1,MF4,MF5,MF6 0.5 m/0.18 m
MF2,MF3,MF7,MF8 0.18 m/0.18 m
Vc 0.4V
vbp MF8
vfb
cm1cm2
MF7
MF6
MF1
MF5
MF2 MF3
MF4
vc

162
Behind the amplifier, an ultra-low power filter with low cut-off
frequency is chosen to avoid the out-of-band noise (typically above the
frequency of 250 Hz). In low frequency Electrocardiogram (ECG)
applications, large time constant ( =RC) are to be used in low pass filter
design which necessarily uses an acceptable capacitor’s value (typically 10
pF) that requires greater resistance. Switched capacitor (SC) technique is a
good option to implement long term ECG monitor system. However, the
leakage problem in the switch based topologies makes in unsuitable for
applications requiring large time constant (of the order of millisecond or
more). In order to overcome this problem, additional leakage reducing
mechanism is required in the switched capacitor circuits. Alternatively, a low-
power continuous time OTA-based filter is opted for the realization of the
filter that comprises of the open-loop OTA-C integrators. The
transconductance of the OTA dominates to determine the time constant of
OTA-C integrators. For a differential input of 1mV, the differential output is
30.446 mV. Hence approximately 30 dB gain is obtained. The other simulated
parameters are tabulated in Table 5.3.
Table 5.3 Simulated Parameters of the Fully Differential OTA
Parameter Fully Differential OTATechnology (µm) 0.18
Supply Voltage (V) 1Gain (dB) 30
CMRR (dB) 93PSRR (dB) 62.5
Transconductance (nS) 500THD (dB) -101.22HD3 (dB) -69.05
Slewrate (V/µS) 13.37Load capacitance (pF) 10
Power consumption ( W) 2.919

163
5.3 LOW PASS FILTER
The biomedical signals with very low amplitude and frequency are
inherently presented with external disturbance or noise like signals due to
interference. Voltages or currents that tend to corrupt the main signal, such as
switching noise in the system power supply ripple, tend to affect the data
present in the signal. Hence, low pass filters are used to remove the unwanted
frequency components. In practice, there are a number of situations in which
analog continuous time filters are a necessity. Analog filter circuits provide
band limiting of the signals before the signals can be sampled for further
processing. A transconductance based low pass filter circuit is built for this
purpose.
5.3.1 Second Order Butterworth Low Pass Filter using FD OTA
A biquad filter is a type of linear filter that implements a transfer
function that is the ratio of two quadratic functions. Biquad filters are
typically active and implemented with a single amplifier biquad (SAB) or
two-integrator-loop topology as stated in Solis-Bustos et al (2000).
• The SAB topology uses feedback to generate complex poles
and possibly complex zeros. In particular, the feedback moves
the real poles of an RC circuit in order to generate the proper
filter characteristics.
The two integrator loop topology is derived by rearranging a
biquadratic transfer function. The rearrangement will equate
one signal with the sum of another signal, its integral, and the
integral's integral. In other words, the rearrangement reveals a
state variable filter structure. By using different states as
outputs, any kind of second-order filter can be implemented.

164
The SAB topology is sensitive to component choice and can be
more difficult to be adjusted. Hence, usually the term biquad refers to the two
integrator loop state variable filter topology. A complete second order Gm-C
filter built using fully differential OTA is shown in Figure 5.5, where gm1
converts the input voltage into a current, gm2 represents the resistors R, the
capacitors C1 remains unchanged, and gm3 and gm4 form a gyrator with the
inductor L = . This filter is build using the fully differential OTA.
Fully differential circuits provide a higher common-mode rejection and an
increment of 3 dB in dynamic range when compared to single end structures
(Schaumann et al 2003).
Figure 5.5 Second order Gm-C filter structure
The low pass filter designed using Gm-C (transconductance and
capacitor) topology operates at low supply voltage, provides wide tuning
range and good controllability. Continuous time filtering has signals that are
continuous in time and require no sampling, making them suitable to be used
in high speed circuits. Fully differential Second order Gm-C lowpass filter
structure is implemented and simulated in the Synopsys tool. From the Figure
5.6, it can be observed that the open loop gain is found to be -10 dB and
cutoff frequency is nearly 250 Hz as designed in Shuenn-Yuh and Chih-Jen

165
(2009). Table 5.4 gives the various simulated parameters of the Second order
Gm-C low pass filter.
Figure 5.6 AC Analysis of Second order Gm-C Low Pass Filter
Table 5.4 Parameter of the Second Order Gm-C Low Pass Filter
Parameter Second order Gm-C LPFTechnology (µm) 0.18Supply Voltage (µm) 1Gain (dB) -10Power consumption ( W) 14.65THD (dB) 6.98Load capacitance C1,C2 ( F) 2, 0.6
The operational transconductance amplifier has been designed and
simulated using standard CMOS 0.18 m technology with a supply voltage of
1V in Synopsys tool. The simulated results shows that fully differential OTA
attains 30 dB gain, power of 2.919 W, transconductance value of 500 nS and
THD of -101.22 dB. The second order OTA based Butterworth low pass filter
operates at 250 Hz with a power consumption of 14.65 W. Thus, this
structure is suited to be an analog front end for cardiac signal processing.

166
5.4 SINGLE ENDED FOLDED CASCODE (SEFC) OTA
Various types of OTA are available as amplifiers for amplifying the
weak biomedical signals, such as telescopic OTA, Folded Cascode OTA
using Wilson Current Mirror, Folded Cascode OTA using Cascode Current
mirror and gain boosted OTA. The telescopic topology has low power
consumption and low noise, but is inhibited in its input and output swings.The
folded cascode OTA with Wilson mirror has a limited output swing and to
overcome this limitation, the cascode current mirror is used. The Folded
cascode OTA with cascode current mirror provides higher gain, good slew
rate and an increased output swing. Thus, this OTA is used in the analog front
end processing of cardiac signals. The architectures of these OTA’s are
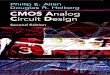
already discussed in Chapter 2. The Single ended folded cascode OTA with
cascode current mirror (Figure 5.7) is applied with biomedical signals.
Figure 5.7 Folded Cascode OTA based on Cascode Current Mirror
M3
Vout
M4
M6M5
M1 M2
VDD
V- V+
CL
M7 M8
M11
M12
M9 M10Ibias
VSS
Ibias

167
The input differential stage consist of PMOS transistors M9 and M10 which
intends to charge the cascode current mirror M1-M4. MOSFETS M11 and
M12 provide the DC bias voltages to M5, M6, M7 and M8 transistors. The
circuit has high gain and transition frequency. The degradation of the
bandwidth is due to the first pole weakening of the OTA without increasing
the DC gain as indicated by Houda et al (2006). Further, the circuit has an
output and input common mode range near of ±Vdd with an offset voltage.
Thus the OTA is designed with the specification given in Table 5.5.
Table 5.5 Specifications of OTA
Specifications ValuesAv(dB) 82.15
fT(Hz) 250
CL(pf) 0.1
ID(nA) 4.8
±Vdd(V) ± 2
Channel length(µm) 1
A top down synthesis methodology for CMOS OTA architectures
illustrated by Silveira et al 1996 is used for design of the OTA. The design
plan is based on gm /ID methodology. In the gm/ID method, the relationship
between the ratio of the transconductance gm over dc drain current ID and the
normalized drain current IO= ID / (W/L) as a fundamental design tool is
considered. The gm/ID methodology is strongly recommended because it
indicates the device operating regions and helps in determining device sizes.
The gm/ID indicates that the greater the gm/I D value, greater is the
transconductance value resulting in higher gain. Thus, this is an efficient
method to design an OTA. The design parameters are provided in Table 5.6.

168
Table 5.6 Design Parameters of the Folded Cascode OTA
Parameters ValuesW9,10(µm) 35
W1,2,3,4(µm) 18
W5,6,7,8,11,12(µm) 6
The performance of the folded cascode OTA for the biomedical
signal is analyzed here. A differential input voltage of 20 µV is applied to the
OTA to obtain the differential output of 0.5V, as shown in Figure 5.8.
Figure 5.8 Differential Response of Folded Cascode OTA
The frequency response of the implemented folded cascode OTA
(based on cascode current mirror) is shown in Figure 5.9. From the figure, it
is clear that the OTA obtains a gain of 82.18 dB.

169
Figure 5.9 Frequency Response of Folded Cascode OTA
Figure 5.10 shows the frequency response for the calculation of
CMRR of the folded cascode OTA. The CMRR obtained is about 131.41dB.
Figure 5.10 Frequency Response for Measuring CMRR
The slew rate and PSRR is measured as 148.66 µV/s and 82.5 dB
and is shown in Figure 5.11 and 5.12 respectively.

170
Figure 5.11 Differential Response for measuring Slew Rate
Figure 5.12 Frequency Response for measuring PSRR
The measured transconductance is 121 µS of the folded Cascode
OTA. The HD3 and THD of the OTA is calculated as -56.13dB and -44.16dB

171
respectively. The folded cascode OTA is simulated using CMOS 0.35µm
technology in H-Spice Synopsys tool and the results are tabulated as in
Table 5.7.
Table 5.7 Simulated Results of Folded Cascode OTA
Parameters ValueSupply Voltage(V) 2DC gain(dB) 82.15Common Mode Rejection Ratio(dB) 131.77Power Supply Rejection Ratio(dB) 82.503Slew Rate(V/µs) 149.09Transconductance(µS) 121THD (dB) -44.16HD3 (dB) -56.134Power(µW) 158.5
Low-voltage operation is an important design issue when aiming
for low power consumption. The folded cascode OTA designed is able to
obtain high gain and CMRR with low power consumption. It also achieves
good PSRR, HD3 and THD. So, the OTA can be used in second order filter
structure to perform filtering of biomedical signals.
5.5 CANONICAL SECOND ORDER FILTER STRUCTURES
Second-order filter structures find widespread applications in the
design of higher-order filters. Canonical second order filter circuits have
constant-Q pole adjustment, constant bandwidth 0 adjustment, and
independent pole and zero adjustment. Four such 2nd order Gm-C low pass
filter structures are build using single ended folded cascode OTA’s and their
designs are given here. The first structure employs constant bandwidth 0

172
adjustment where as second, third and fourth structure involves independent
pole and zero adjustment. In all the four filter structures, the input voltage is
applied to Va and inputs Vb and Vc are connected to ground to make the filter
to act as a low pass filter as indicated by Geiger and Sanchez-Sinencio
(1985).
5.5.1 First Structure of 2nd Order Gm-C Low Pass Filter
The First structure of second-order low-pass filter is shown in
Figure 5.13.
Figure 5.13 First structure of 2nd order Low Pass Filter
The output voltage, Vo1, is given by the expression
Vs C C V + sC g V + g g V
s C C + sC g + g g (5.7)
This circuit is with Constant 0 adjustment by setting = g =
g . Thus the transfer function of the above filter structure becomes
( ) =g g
s C C + sC g + g g(5.8)

173
The common transfer function of a 2nd order low-pass filter as in equation
( ) =s + Q s +
(5.9)
Comparing 5.8 and 5.9, the frequency is calculated from the Equation (5.10)
=g
c1c2 (5.10)
The Quality Factor of the filter designed is calculated from the Equation (5.11)
(5.11)
Where = g = g and , then
g =I IV V
(5.12)
The cutoff frequency of the filter is 224 Hz. and is shown in Figure 5.14.
Figure 5.14 Frequency Response of the First structure of Low Pass Filter

174
5.5.2 Second Structure of 2nd Order Gm-C Low Pass Filter
The Second structure of second-order low-pass filter is shown in
Figure 5.15.
Figure 5.15 Second structure of 2nd order Low Pass Filter
The output voltage, Vo2, is given by the expression
=s C C V + sC g V + g g Vs C C + sC g g R + g g
(5.13)
This is a circuit where both 0 and Q can be independently
adjusted. Thus the transfer function of the above filter structure becomes
=g g V
s C C + sC g g R + g g (5.14)
Comparing 5.13 and 5.14, the frequency bandwidth w0 and Quality
Factor Q are given by the expressions 5.15 and 5.16.

175
=g g
C C (5.15)
Q =1
g Rg CC g
(5.16)
Here poles can be moved in a constant Q manner by adjusting gm1 =gm2=gm
and keeping gm3 constant. Similarly, constant 0 movement is obtained by
adjusting gm3 and maintaining gm1 =gm2=gm constant. The cutoff frequency of
the filter is 255Hz. Figure 5.16 shows the frequency response of the filter.
Figure 5.16 Frequency Response of the Second structure of Low Pass
Filter
5.5.3 Third Structure of 2nd Order Gm-C Low Pass Filter
The Third structure of second-order low-pass filter is shown in
Figure 5.17.

176
Figure 5.17 Third structure of 2nd order Low Pass Filter
The output voltage, Vo3, is given by the expression
V = (5.17)
This circuit is also with independent 0 and Q adjustment. Thus the
transfer function of the above filter structure becomes
V = g g V
s C C + sC g + g g (5.18)
Comparing with the common transfer function of a 2nd order low-
pass filter, the frequency bandwidth 0 and Quality Factor Q are given by the
expressions 5.19 and 5.20.
= (5.19)
Q =CC
g gg
(5.20)

177
Here 0 can be adjusted linearly by setting gm1 =gm2=gm and gm3 constant.
This is called as constant bandwidth movement. By adjusting gm1, gm2, and gm3
simultaneously, constant Q movement is possible.The cutoff frequency of the
filter is 251 Hz. Figure 5.18 shows the frequency response of the filter.
Figure 5.18 Frequency Response of the Third structure of Low Pass Filter
5.5.4 Fourth Structure of 2nd Order Gm-C Low Pass Filter
The fourth structure of second-order low-pass filter is shown in
Figure 5.19.
Figure 5.19 Fourth structure of 2nd order Low Pass Filter

178
The output voltage, Vo4, is given by the expression
V (5.21)
This is also a circuit where both 0 and Q can be independently
adjusted. Thus, the transfer function of the above filter structure becomes
Vg g V
s C C + sC g + g g (5.22)
Comparing with the common transfer function of a 2nd order low-
pass filter, the frequency bandwidth 0 and Quality Factor Q are given by theexpressions 5.23 and 5.24.
= (5.23)
Q = (5.24)
The constant Q and 0 movement is made similar as in third structure.
The cutoff frequency is found to be 255 Hz from the frequency
response of the filter and is shown in Figure 5.20.
Figure 5.20 Frequency Response of the Fourth structure of Low Pass Filter

179
5.6 SECOND ORDER BUTTERWORTH LOW PASS FILTER
USING SEFC OTA
The single ended representation of the second order Gm-C
Butterworth Low Pass Filter provided by Schaumann et al (2003) is shown in
Figure 5.21. The filter is realized using the single ended folded cascode
structure to compare its performance with the canonical structures.
Figure 5.21 Single ended Second order Gm-C Filter Structure
The frequency response of the filter is shown in Figure 5.22 and the
cutoff frequency of the filter is 258 Hz. The power consumption of the
Butterworth filter is measured to be 380.1µW and the THD is -50.610 dB.
Figure 5.22 Frequency Response of the Butterworth Filter

180
The performance comparison of the four canonical and Butterworth low pass
filter structures are tabulated in Table 5.8.
Table 5.8 Comparison of the Low Pass Filter Structures
Low Pass Filter Power(µW) THD (dB) CutoffFrequency(Hz)
1st Canonical LPF 316.9 -37.80 2242nd Canonical LPF 475.4 -37.79 2553rd Canonical LPF 475.4 -37.80 2514th Canonical LPF 475.4 -37.80 255Butterworth LPF 380.1 -50.610 258.5
Out of the four canonical structures designed the 2nd, 3rd, and 4th
structures gives more accurate results compared to the first structure as they
have independent pole and zero adjustments. They can be also used as low
pass filters in the analog front end processing. The second order Butterworth
low pass filter designed using the folded cascode OTA shows a better
response when compared to canonical structures in terms of power and total
harmonic distortion. There is about 20.06 % reduction in power and 12.8 dB
improvement in total harmonic distortion when compared to 2nd, 3rd, and 4th
canonical structures.
5.7 SIMULINK MODEL OF FIRST ORDER LOW PASS FILTER
A first order passive RC filter is transformed into active filter using
OTA. The series combination of resistor with voltage source is realized with a
Norton’s circuit using shunt resistor together with a current source. The active
filter realized from passive components is replaced with real OTA’s, as

181
illustrated in Figure 5.23 which includes an input voltage to current transducer
and an equivalent grounded resistor of OTA based on the close loop
configuration. Its transfer function is depicted as
+(5.25)
Figure 5.23 First Order Filter using OTA
The performance analysis of the first order filter is assisted by
including non ideal parameters like nonlinearity, intrinsic noise and finite gain
(Shuenn-Yuh and Chih-Jen 2009). The details are described below.
5.7.1 OTA Nonlinearity
The performance of OTA is evaluated with the nonlinear effects
present in the circuits. In general, a nonlinear transconductance is expressed
as
= (1 + + ) (5.26)
Where is the transconductance of the OTA with the zero input
differential voltage and i represents the coefficient with respect to the
Gm2Gm1
+
-+
-
VinVout

182
higher order expansion term of nonlinearity. The Simulink model of OTA
using nonlinear transconductance is shown in Figure 5.24, where af1 and af2
refer to the coefficient in (5.26), respectively.
Figure 5.24 Simulink Model using nonlinear Transconductance
5.7.2 OTA Noise
Flicker and thermal noise are the two main noise sources that
influence the performance of OTA. The flicker noise influences the
performance of OTA in low-frequency band and thermal noise is influenced
by temperature. The flicker noise is also known as 1/f noise, because its noise
power spectral density is inversely proportional to frequency. The simulink
model of the first order filter including the non-idealities is shown in
Figure 5.25.
1
af1
af2
1
1
gm0
X
X
X
constant
alpha1
alpha2
Vd
Gm
Gm0
+
+
+

183
Figure 5.25 Simulink Model of First Order Low Pass Filter including
non linearities
The noise power spectrum density (PSD) of input referred 1/f noise
is given as
S , =KF
C W L f(5.27)
Where the parameters KF and AF represents the coefficient and exponent
constant of flicker noise, respectively, Cox is the oxide capacitance per unit
area, and Weff and Leff are the effective channel width and length of
transistors, respectively. The PSD equation of input-referred thermal noise is
expressed as
S , = . . . (5.28)
1
noin
OTA noise
Vd Gm
++
X 1
Iout
Gm curve
1/(sCL + 2g0)-1
+-
11 Vd
Vd
Iout
Iout
Gm1
Gm2
VinVOUTGain
TF1OTA
OTA

184
Where K is Boltzmann’s constant, T is the absolute temperature. The value of
is chosen as 1/ (2k) to operate the transistor in sub threshold region for low-
power and low-frequency requirements.
The total input referred noise is obtained for the spectrum of the
sum of N sine waves with random phase i, along with the amplitude of 1/f
noise af, and the amplitude of thermal noise ath.
, ( ) = , + . sin(2 + ) (5.29)
The coefficient af,i is given as in Equation (5.30) considering 1/f noise.
, = 2 ( ) (5.30)
Here in ECG application, f is chosen as 1 Hz to make N as 250. When
thermal noise is considered as white noise, its magnitude is given as
= 2 f (5.31)
Referring to (5.29), the total input referred noise is then
superimposed on the nonlinear model of Figure 5.25 and simulated in the time
domain to find the circuit performance.
5.7.3 OTA Finite Gain
Ideally, the OTA has infinite output resistance. But in practice, a
finite resistance is present always due to channel length modulation. This
results in larger integrator loss and also influences the performance of the
filter response. The transfer function can be represented as

185
VV
GsC + G + 2g
(5.32)
where 1/ is the finite resistance.
5.8 FIRST ORDER FILTER USING SIMULINK MODEL
The non-idealities present in the OTA simulink model of the first
order low pass filter is designed using the transfer function and is shown in
Figure 5.26.
Figure 5.26 Simulink implementation of First Order Filter
The subsystem in the first order filter is shown in Figure 5.27
which includes the noise block with the specifications of flicker noise and
thermal noise.

186
Figure 5.27 Simulink implementation of noise added to the signal
The non linearity in transconductance is implemented using
simulink as in Figure 5.28 with the values 1 and 2 taken as -0.291 and
-2.246 respectively and gm0 is 126 µS for folded cascode OTA.
Figure 5.28 Simulink implementation of the non linear transconductance

187
The spectrum analyzer displays the frequency response of the
system analyzing both the input and output of the system. It gives better
results when inputs with high harmonic distortion contents are provided.
The frequency response of the output of the low pass filter with folded
cascode OTA is shown in Figure 5.29. The cut off frequency is 1595 rads/s
(253.98 Hz).
Figure 5.29 Spectrum Response of the First Order Filter
The power spectral density block displays the frequency content of
the signal. The power spectral density of the filter output is shown in
Figure 5.30. The output indicates that there is no data available after the cut
off frequency which indicates that efficiency of the filter.
The noise Voltage density is shown in the Figure 5.31. The
maximum amplitude of the noise is 4.2*10(-6) V.

188
Figure 5.30 Power Spectral Density of the First Order Filter
Figure 5.31 Noise Voltage Density applied in the First Order Filter
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.5
1
1.5
2
2.5
3
3.5
4
4.5x 10-6 NOISE
Time (ms)

189
The noise Power spectral density is shown in Figure 5.32. The
noise Power Spectral density shows that the noise is very less in amplitude at
all frequencies below 250Hz.
Figure 5.32 Noise Power Spectral Density
All signal components are delayed when passing through a device
such as an amplifier, filter etc. The delay is different for different frequencies.
The group delay response of the first order filter output is shown in
Figure 5.33. In this filter it is in the order of milliseconds for frequencies
within the desird bandwidth of 250Hz.

190
Figure 5.33 Group Delay Response of First Order Filter Output
Thus all the results of the filter structure using folded cascode OTA
in simulink model indicates that the filter can be used for ECG applications.
5.9 CONCLUSION
In real world, signals are in continuous time format. Also the
process of band-limiting, anti aliasing, and reconstruction is done to interface
the signals with real world. Even internal to a digital transmission system,
analog filters are used for band-limiting to achieve noise reduction, and to
equalize gain or delay to compensate for losses in the transmission channel.
The basic OTA desired for the filter implementation is based on the following
criteria such as gain, CMRR, power consumption, operating frequency range
and noise. The designed folded cascode OTA achieves high gain of 82.15 dB,
CMRR of 131.77dB, PSRR of 82.5 dB with -44.16 dB THD and 158.5 µW of
power. Thus, the Second order Gm-C filter designed using folded cascode
OTA meets most of the factors required to filter the low frequency cardiac
signal. The Butterworth low pass filter achieves THD of -50.6 dB, power

191
consumption of 380.1µW at a cutoff frequency of 258.5Hz and the results are
validated using CMOS 0.35µm technology in Synopsys tool. This shows that
Butterworth filter performs better than the canonical filter structures and can
be utilized as an analog front end for bio acquisition system.