Embed Size (px)
Citation preview
CIS009-2, MechatronicsRobotic Arms & Hands
David Goodwin
Department of Computer Science and TechnologyUniversity of Bedfordshire
06th December 2012
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Outline
1 Robot ArmsAxes of motionDegrees of freedomTypesDesign
Industrial Applications
2 End effectorsMechanical typesSuction typeMagnetic grippers
47
Mechatronics
David Goodwin
3Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Robot Arms
47
Mechatronics
David Goodwin
4Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Robot ArmsConsidering design specifications
� Robots are designed for specific purposes. For this reasonthere are many configurations of robotic systems available.
� Key points for robot arm design� Manoeuvrability� Intricate movements� Ability to carry heave loads� Speed
47
Mechatronics
David Goodwin
5Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Axes of Motion & Degrees of Freedom
� Terms used when discussing robot geometry andspecifications of robots.
� Both terms mean differently and should not be confused witheach other.
47
Mechatronics
David Goodwin
Robot Arms
6Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Axes of motion
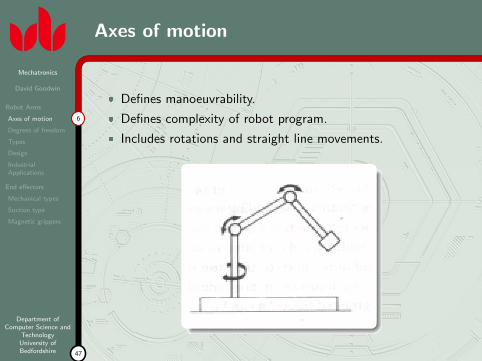
� Defines manoeuvrability.
� Defines complexity of robot program.
� Includes rotations and straight line movements.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
7Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Degrees of freedom
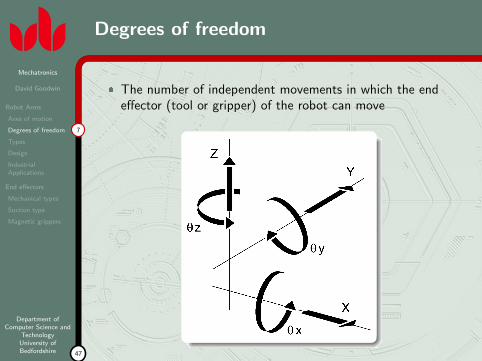
� The number of independent movements in which the endeffector (tool or gripper) of the robot can move
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
8Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Degrees of freedomExample
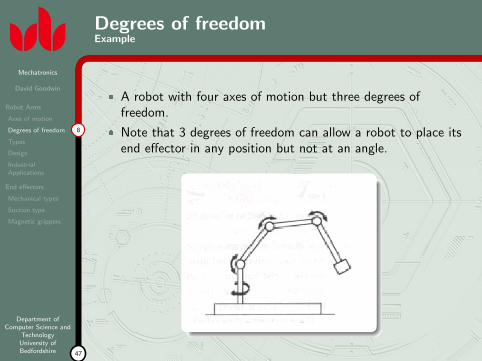
� A robot with four axes of motion but three degrees offreedom.
� Note that 3 degrees of freedom can allow a robot to place itsend effector in any position but not at an angle.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
9Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
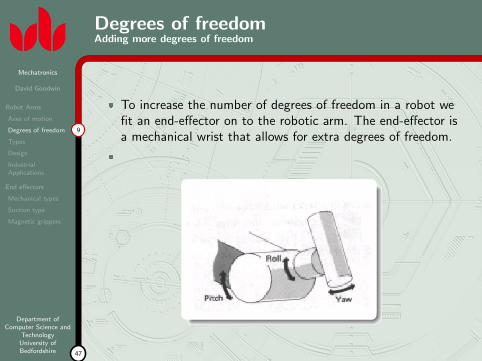
Degrees of freedomAdding more degrees of freedom
� To increase the number of degrees of freedom in a robot wefit an end-effector on to the robotic arm. The end-effector isa mechanical wrist that allows for extra degrees of freedom.
�
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
10Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
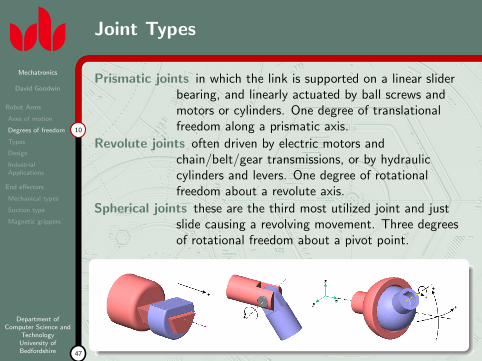
Joint Types
Prismatic joints in which the link is supported on a linear sliderbearing, and linearly actuated by ball screws andmotors or cylinders. One degree of translationalfreedom along a prismatic axis.
Revolute joints often driven by electric motors andchain/belt/gear transmissions, or by hydrauliccylinders and levers. One degree of rotationalfreedom about a revolute axis.
Spherical joints these are the third most utilized joint and justslide causing a revolving movement. Three degreesof rotational freedom about a pivot point.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
11Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
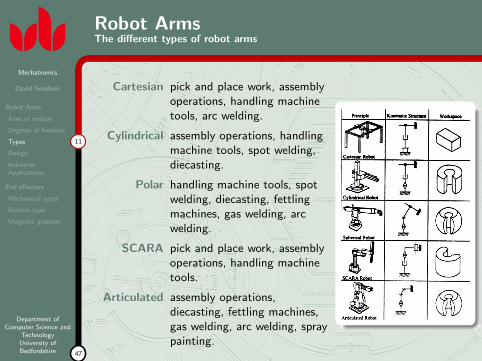
Robot ArmsThe different types of robot arms
Cartesian pick and place work, assemblyoperations, handling machinetools, arc welding.
Cylindrical assembly operations, handlingmachine tools, spot welding,diecasting.
Polar handling machine tools, spotwelding, diecasting, fettlingmachines, gas welding, arcwelding.
SCARA pick and place work, assemblyoperations, handling machinetools.
Articulated assembly operations,diecasting, fettling machines,gas welding, arc welding, spraypainting.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
12Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
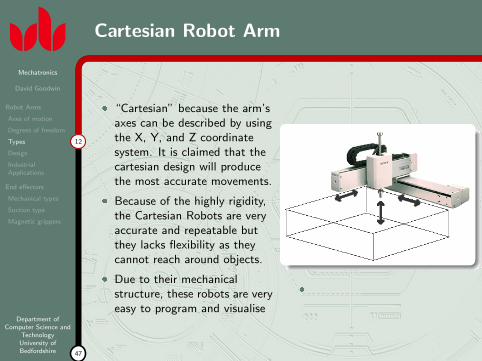
Cartesian Robot Arm
� “Cartesian” because the arm’saxes can be described by usingthe X, Y, and Z coordinatesystem. It is claimed that thecartesian design will producethe most accurate movements.
� Because of the highly rigidity,the Cartesian Robots are veryaccurate and repeatable butthey lacks flexibility as theycannot reach around objects.
� Due to their mechanicalstructure, these robots are veryeasy to program and visualise
�
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
13Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
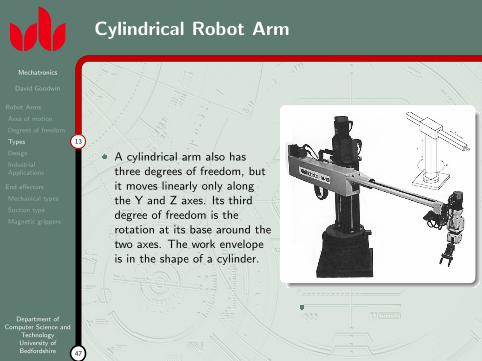
Cylindrical Robot Arm
� A cylindrical arm also hasthree degrees of freedom, butit moves linearly only alongthe Y and Z axes. Its thirddegree of freedom is therotation at its base around thetwo axes. The work envelopeis in the shape of a cylinder.
�
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
14Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
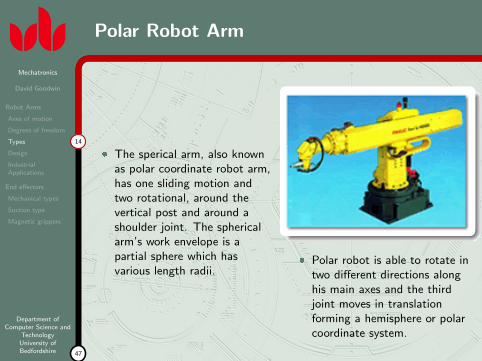
Polar Robot Arm
� The sperical arm, also knownas polar coordinate robot arm,has one sliding motion andtwo rotational, around thevertical post and around ashoulder joint. The sphericalarm’s work envelope is apartial sphere which hasvarious length radii.
� Polar robot is able to rotate intwo different directions alonghis main axes and the thirdjoint moves in translationforming a hemisphere or polarcoordinate system.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
15Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
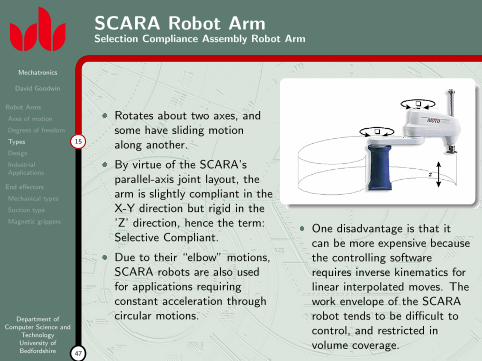
SCARA Robot ArmSelection Compliance Assembly Robot Arm
� Rotates about two axes, andsome have sliding motionalong another.
� By virtue of the SCARA’sparallel-axis joint layout, thearm is slightly compliant in theX-Y direction but rigid in the’Z’ direction, hence the term:Selective Compliant.
� Due to their “elbow” motions,SCARA robots are also usedfor applications requiringconstant acceleration throughcircular motions.
� One disadvantage is that itcan be more expensive becausethe controlling softwarerequires inverse kinematics forlinear interpolated moves. Thework envelope of the SCARArobot tends to be difficult tocontrol, and restricted involume coverage.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
16Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
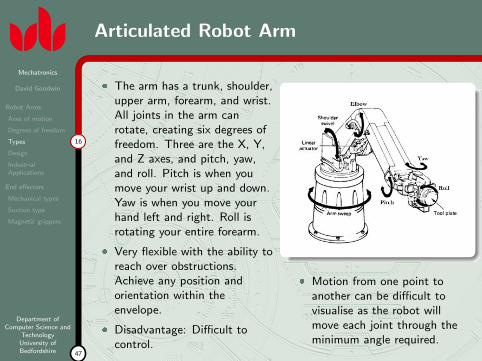
Articulated Robot Arm
� The arm has a trunk, shoulder,upper arm, forearm, and wrist.All joints in the arm canrotate, creating six degrees offreedom. Three are the X, Y,and Z axes, and pitch, yaw,and roll. Pitch is when youmove your wrist up and down.Yaw is when you move yourhand left and right. Roll isrotating your entire forearm.
� Very flexible with the ability toreach over obstructions.Achieve any position andorientation within theenvelope.
� Disadvantage: Difficult tocontrol.
� Motion from one point toanother can be difficult tovisualise as the robot willmove each joint through theminimum angle required.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
17Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Accuracy & Repeatability
Accuracy How close does the robot get to the desired point?When the robot’s program instructs the robot tomove to a specified point, it does not actaullyperform as per specified. The accuracy measuresuch variance. That is, the distance between thespecified position that a robot is trying to achieve(programming point), and the actual X, Y and Zresultant position of the robot end effector.
Repeatability The ability of a robot to return repeatedly to agiven position. It is the ability of a robotic systemor mechanism to repeat the same motion or achievethe same position. Repeatablity is is a measure ofthe error or variability when repeatedly reaching fora single position. Repeatability is often smaller thanaccuracy.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
18Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Degree of Freedom (DOF)
� Each joint or axis on the robot introduces a degree offreedom. Each DOF can be a slider, rotary, or other type ofactuator. The number of DOF that a manipulator possessesthus is the number of independent ways in which a robot armcan move. An industrial robot typically have 5 or 6 degrees offreedom. 3 of the degrees of freedom allow positioning in 3Dspace (X, Y, Z), while the other 2 or 3 are used for orientationof the end effector (yaw, pitch and roll). 6 degrees of freedomare enough to allow the robot to reach all positions andorientations in 3D space. 5 DOF requires a restriction to 2Dspace, or else it limits orientations. 5 DOF robots arecommonly used for handling tools such as arc welders.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
19Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Resolution
� The smallest increment of motion or distance that can bedetected or controlled by the robotic control system. It is afunction of encoder pulses per revolution and drive (e.g.reduction gear) ratio. And it is dependent on the distancebetween the tool center point and the joint axis.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
20Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Reach & Envelope
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
21Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Envelope
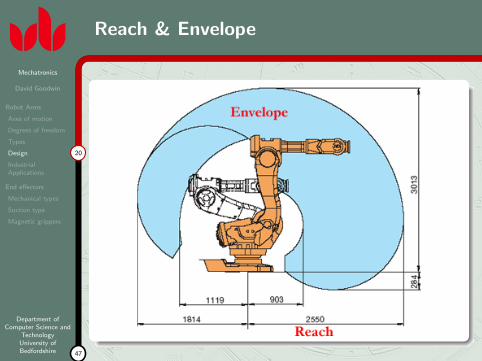
� A three-dimensional shape that defines the boundaries thatthe robot manipulator can reach; also known as reachenvelope.
Maximum envelope the envelope that encompasses themaximum designed movements of all robotparts, including the end effector, workpiece andattachments.
Restricted envelope is that portion of the maximumenvelope which a robot is restricted by limitingdevices.
Operating envelope the restricted envelope that is used bythe robot while performing its programmedmotions.
Reach The maximum horizontal distance from thecenter of the robot base to the end of its wrist.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
22Design
IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Speed & Payload
Maximum Speed A robot moving at full extension with all jointsmoving simultaneously in complimentary directionsat full speed. The maximum speed is thetheoretical values which does not consider underloading condition..
Payload The maximum payload is the amount of weightcarried by the robot manipulator at reduced speedwhile maintaining rated precision. Nominal payloadis measured at maximum speed while maintainingrated preci-sion. These ratings are highly dependenton the size and shape of the payload due tovariation in inertia.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
23IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Medical Robots
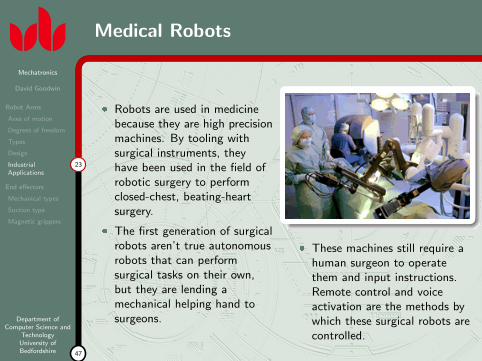
� Robots are used in medicinebecause they are high precisionmachines. By tooling withsurgical instruments, theyhave been used in the field ofrobotic surgery to performclosed-chest, beating-heartsurgery.
� The first generation of surgicalrobots aren’t true autonomousrobots that can performsurgical tasks on their own,but they are lending amechanical helping hand tosurgeons.
� These machines still require ahuman surgeon to operatethem and input instructions.Remote control and voiceactivation are the methods bywhich these surgical robots arecontrolled.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
24IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Military Robots
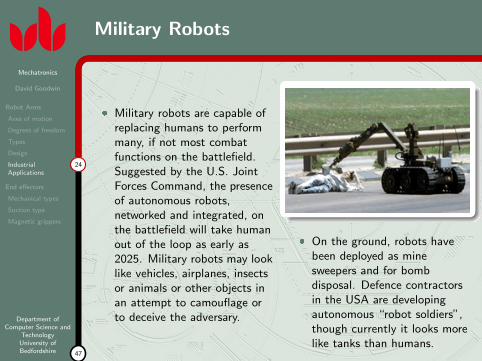
� Military robots are capable ofreplacing humans to performmany, if not most combatfunctions on the battlefield.Suggested by the U.S. JointForces Command, the presenceof autonomous robots,networked and integrated, onthe battlefield will take humanout of the loop as early as2025. Military robots may looklike vehicles, airplanes, insectsor animals or other objects inan attempt to camouflage orto deceive the adversary.
� On the ground, robots havebeen deployed as minesweepers and for bombdisposal. Defence contractorsin the USA are developingautonomous “robot soldiers”,though currently it looks morelike tanks than humans.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
25IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
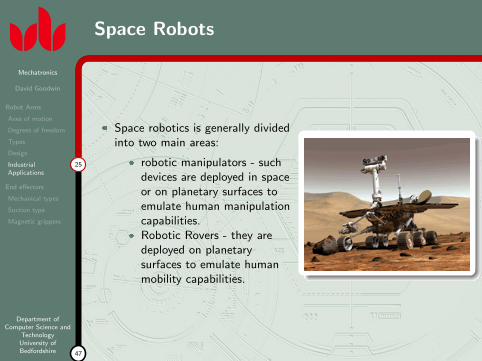
Space Robots
� Space robotics is generally dividedinto two main areas:
� robotic manipulators - suchdevices are deployed in spaceor on planetary surfaces toemulate human manipulationcapabilities.
� Robotic Rovers - they aredeployed on planetarysurfaces to emulate humanmobility capabilities.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
26IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
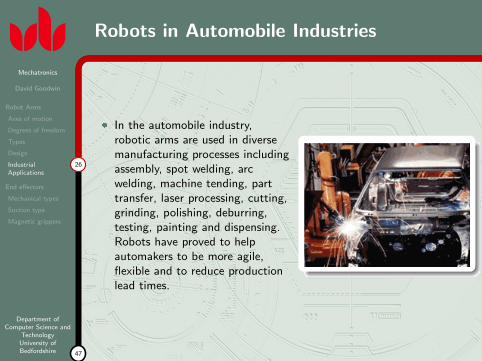
Robots in Automobile Industries
� In the automobile industry,robotic arms are used in diversemanufacturing processes includingassembly, spot welding, arcwelding, machine tending, parttransfer, laser processing, cutting,grinding, polishing, deburring,testing, painting and dispensing.Robots have proved to helpautomakers to be more agile,flexible and to reduce productionlead times.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
27IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
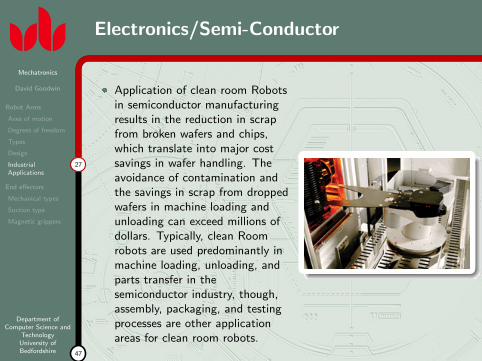
Electronics/Semi-Conductor
� Application of clean room Robotsin semiconductor manufacturingresults in the reduction in scrapfrom broken wafers and chips,which translate into major costsavings in wafer handling. Theavoidance of contamination andthe savings in scrap from droppedwafers in machine loading andunloading can exceed millions ofdollars. Typically, clean Roomrobots are used predominantly inmachine loading, unloading, andparts transfer in thesemiconductor industry, though,assembly, packaging, and testingprocesses are other applicationareas for clean room robots.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
28IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
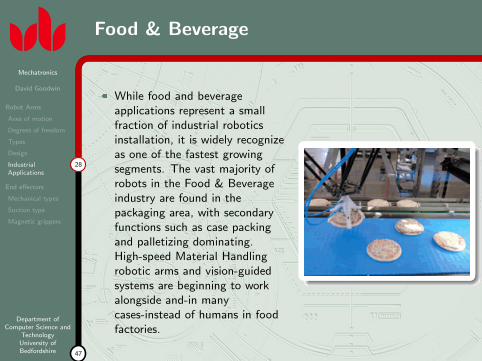
Food & Beverage
� While food and beverageapplications represent a smallfraction of industrial roboticsinstallation, it is widely recognizeas one of the fastest growingsegments. The vast majority ofrobots in the Food & Beverageindustry are found in thepackaging area, with secondaryfunctions such as case packingand palletizing dominating.High-speed Material Handlingrobotic arms and vision-guidedsystems are beginning to workalongside and-in manycases-instead of humans in foodfactories.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
29IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
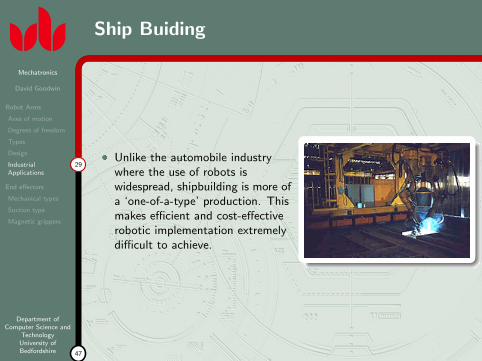
Ship Buiding
� Unlike the automobile industrywhere the use of robots iswidespread, shipbuilding is more ofa ‘one-of-a-type’ production. Thismakes efficient and cost-effectiverobotic implementation extremelydifficult to achieve.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
30IndustrialApplications
End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
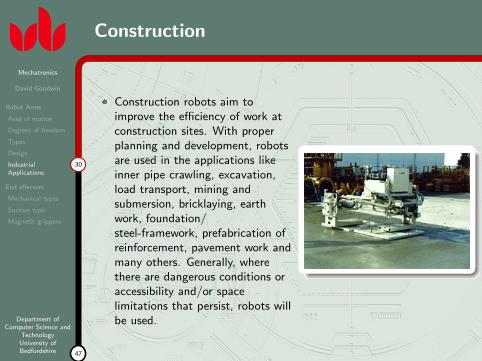
Construction
� Construction robots aim toimprove the efficiency of work atconstruction sites. With properplanning and development, robotsare used in the applications likeinner pipe crawling, excavation,load transport, mining andsubmersion, bricklaying, earthwork, foundation/steel-framework, prefabrication ofreinforcement, pavement work andmany others. Generally, wherethere are dangerous conditions oraccessibility and/or spacelimitations that persist, robots willbe used.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
31End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
End effectors
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
32End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
End effectors
� End effectors are devices fitted to the end of robot arms andused to perform various tasks. They are divided into twogroups:
Grippers These are used for holding and grappingobjects.The include mechanical hands, hooksmagnetic and suction devices for holding andgrapping objects.
Tools Devices that are used by robots to performoperations on objects. Typical examples are:drills, paint spays, grinders welding torches etc.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
33End effectors
Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
End effectors
� There are four general categories of robot grippers, these are:
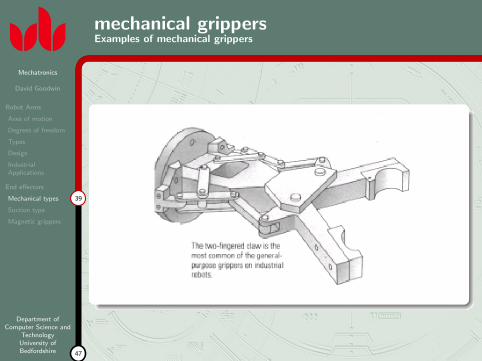
Impactive jaws or claws which physically grasp by directimpact upon the object.
Ingressive pins, needles or hackles which physicallypenetrate the surface of the object (used intextile, carbon and glass fibre handling).
Astrictive suction forces applied to the objects surface(whether by vacuum, magneto- orelectroadhesion).
Contigutive requiring direct contact for adhesion to takeplace (such as glue, surface tension orfreezing).
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
34Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Mechanical grippers
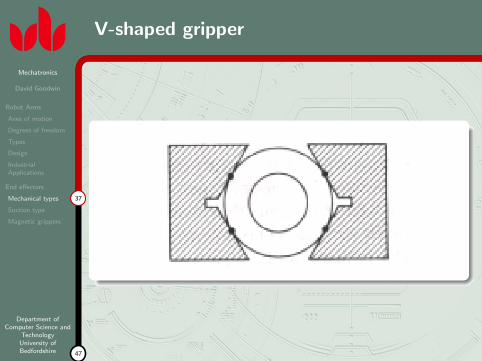
Friction between gripper and the object depends on two factors:
� Surfaces in contact e.g. metal on metal, metal on rubber,smooth surfaces, rough surfaces.
� The force which is pressing the surfaces together. Therequired amount of friction between the gripper and thesurfaces must be considered.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
35Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Gripper pads
� Sometimes gripper pads are used to provide greater frictionbetween gripper and objects.
� Gripper pads also provides a protection for the object frombeing compressed.
� Polyurethane is a well known material for use as pads.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
36Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
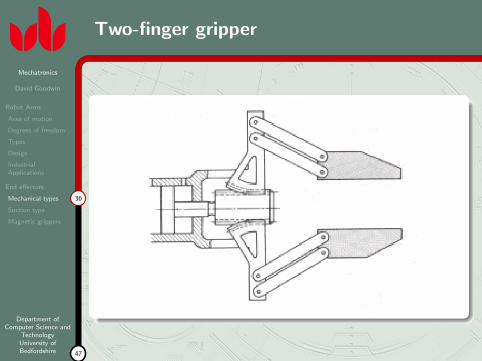
Two-finger gripper
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
37Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
V-shaped gripper
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
38Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
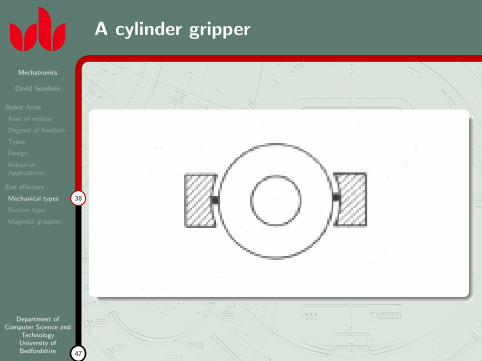
A cylinder gripper
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
39Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
mechanical grippersExamples of mechanical grippers
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
40Mechanical types
Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
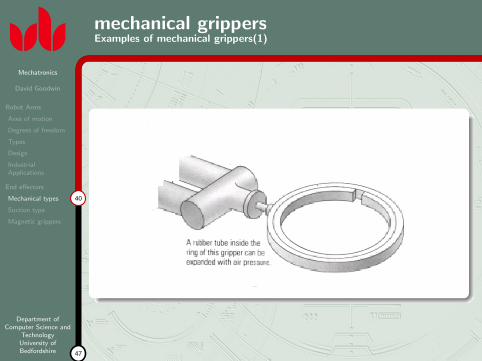
mechanical grippersExamples of mechanical grippers(1)
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
41Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Suction grippers
� Devices operated vacuum gripper. The vacuum may beproduced by two methods: (1) pump operated vacuum and(2) venturi operated vacuum.
� Devices with a flexible suction cap which presses onto thework piece. To release work piece compressed air is blowninto the cup.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
42Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
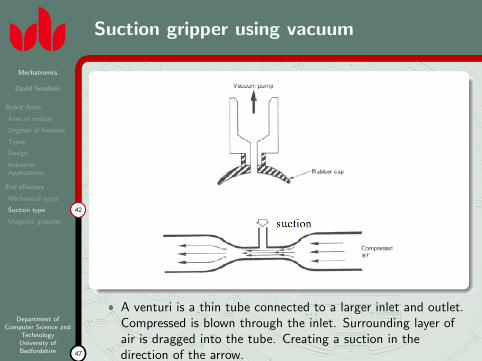
Suction gripper using vacuum
� A venturi is a thin tube connected to a larger inlet and outlet.Compressed is blown through the inlet. Surrounding layer ofair is dragged into the tube. Creating a suction in thedirection of the arrow.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
43Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
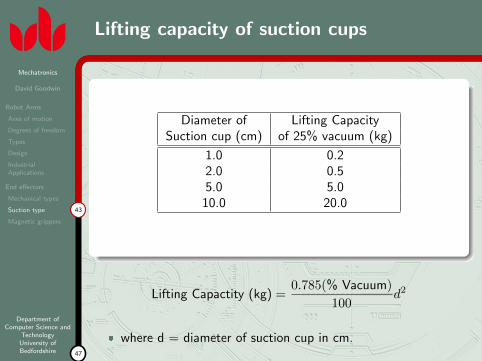
Lifting capacity of suction cups
Diameter of Lifting CapacitySuction cup (cm) of 25% vacuum (kg)
1.0 0.22.0 0.55.0 5.0
10.0 20.0
Lifting Capactity (kg) =0.785(% Vacuum)
100d2
� where d = diameter of suction cup in cm.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
44Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Speed considerations
� Creation of the vacuum can take sometime (i.e. it can causedelays). This delay must be taken into account when severalthousands of lifting operations are expected.
� To avoid delays use suction cup of larger diameter so thatsufficient force is produced before maximum vacuum has beengiven time to develop.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
45Suction type
Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
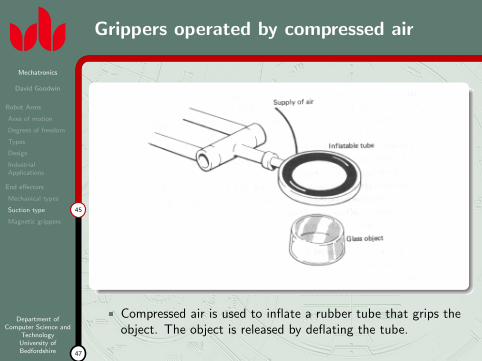
Grippers operated by compressed air
� Compressed air is used to inflate a rubber tube that grips theobject. The object is released by deflating the tube.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
46Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Magnetic grippers
� Used for lifting ferromagnetic objects made from nickel,cobalt, iron and steel (60% of iron). Magnetic grippers haveto be in complete contact with surface of the object to begripped. Flat metals are suitable for magnetic grippers.
� Advantages
� Precise positioning of gripper is not necessary.� Used with objects with different sizes.� Used with objects with irregular shapes.� Act instantaneously.
� Disadvatages� Demagnetises with temperature, especially permanent
magnetic types.� Require the magnetic grip to be applied evenly across a large
object.
47
Mechatronics
David Goodwin
Robot Arms
Axes of motion
Degrees of freedom
Types
Design
IndustrialApplications
End effectors
Mechanical types
Suction type
47Magnetic grippers
Department ofComputer Science and
TechnologyUniversity ofBedfordshire
Magnetic grippers
Permanent magnet � Used in situations where there isexplosive atmosphere (i.e. where sparks fromthe electrical equipment may cause hazards).
� The object picked may be released by pushingit away with an ejector pin fitted to the centreof the gripper.
Electromagnetic � Operated by a DC electric current that ispassed through a coil wound on a magneticmaterial.
� Retains some amount of magnetism whencurrent is switched off.
� To release objects a reverse current is appliedto the coil.
















![Positioning Robotic System Used in Manufacturing Operations · 2018-05-23 · [2] Berian Sergiu, Maties Vistrian, Transdisciplinarity and mechatronics, Curtea Veche Publishing House,](https://img.pdfslide.net/doc/110x75/5f7e40e7ca0f68334c47dcfc/positioning-robotic-system-used-in-manufacturing-operations-2018-05-23-2-berian.jpg)












