Embed Size (px)
Citation preview

Adolfas Dargys Fizikinių ir technologijos mokslų centrasPuslaidininkių fizikos institutas
Artūras Acus Vilniaus UniversitetasTeorinės fizikos ir astronomijos institutas
CLIFFORDO GEOMETRINĖALGEBRA
IRJOS TAIKYMAI

UDK 512Da326
386 psl; 70 iliustr.
Geometrinė algebra, matematikų vadinama Cliffordo algebra, susiformavo praeita-me šimtmetyje. Neabejotina, kad ji taps universalia XXI a. fizikų ir inžinierių ma-tematine kalba, leisiančia patogiai formuluoti ir spręsti visų sričių uždavinius, pra-dedant mechanika ir baigiant reliatyvistine kosmologija. Geometrinė algebra ypačpalengvina skaičiavimus daugiamatėse erdvėse, o jos bekoordinatiniaimetodai labaiprimena daugeliui žinomą vektorinį skaičiavimą trimatėje Euklido erdvėje. Knygaskirta tiksliųjų mokslų studentams ir visiems, norintiems susipažinti su šia univer-salia matematine kalba.
FTMC Puslaidininkių fizikos institutasA. Goštauto 11, http://www.ftmc.lt
Vilniaus universiteto Teorinės fizikos ir astronomijos institutasA. Goštauto 12, http://www.tfai.vu.lt
Recenzavo dr. J. Ruseckasdr. V. Jonauskas
ISBN 978-609-420-437-1 ©Adolfas Dargys, 2015©Artūras Acus, 2015

i
Įžanga
Prieš nusprendžiant, ar verta mokytis naujosmatematikos, visada iškylaklau-simas – ar pastangos atsipirks? Nauja teorija bus suprantama ir, kaip pasekmė,naudinga tik tada, jei teorijoje apibrėžti objektai ir operacijos su jais bus papras-ti ir akivaizdūs. Prisiminkime, pavyzdžiui, aritmetiką. Senovės graikai skaičiusžymėjo raidėmis. Nenuostabu, kad tais laikais net ir toks paprastas veiksmaskaip dviejų triženklių skaičių sudėtis reikalavo nemažai išmanumo ir pastangų.Nulio išradimas ir pozicinė skaičiavimo sistema skaičiavimus taip palengvino,kad dabar sudėtis ir atimtis nekelia sunkumų net pradinukams. Panašiai, atra-dus kompleksinius skaičius ir išmokus juos vaizduoti kompleksinėje plokštumo-je, pasidarė įmanoma išspręsti daug sudėtingų praktinių uždavinių. Kažkada taibuvo naujovė. Dabar su kompleksiniais skaičiais susipažįstama dar mokykloje.
Šiuo metu universitetuose mokoma vektorinio skaičiavimo [1–3]. Tai labaisvarbus matematinis instrumentas, leidžiantis labai ekonomiškai suformuluoti irišspręsti mechanikos, elektrotechnikos, hidrodinamikos, aerodinamokos, elekt-rodinamikos ir kitus uždavinius. Metodas yra bekoordinatinis ir turi aiškią geo-metrinę interpretaciją. Tai leidžia formules užrašyti labai taupiai, o sąryšius tarpformulių pavaizduoti grafiškai. Deja, jis tinka tik dviejų ir trijų matavimų euklidi-nei erdvei. Vektorinio skaičiavimo neįmanoma apibendrinti didesnių matavimųerdvėms, pavyzdžiui, keturmačiam reliatyvumo teorijos erdvėlaikiui, be kurioneįsivaizduojama visa šiuolaikinė fizika.
Geometrinę algebrą (matematikai ją vadina Cliffordo algebra) galima įsivaiz-duoti kaip apibendrintą vektorinį skaičiavimą, tinkantį daugiamatėms tiek eukli-dinėms, tiek ir Minkowskio metrikos erdvėms. Ji susidoroja su visais vektorinioskaičiavimo sunkumais. Geometrinė algebra leidžia formuluoti ir spręsti uždavi-nius iš pačių įvairiausių fizikos sričių: pradedant Newtono ar kvantine mechani-ka, elektrodinamika, reliatyvumo teorija ir baigiant kosmologija ar stygų teorija.Tai glausta, universali, turinti aiškią geometrinę prasmę matematinė kalba, tin-kanti pačioms įvairiausiomsfizikinėms ir matematinėms teorijoms, kurias galimasuformuluoti nenaudojant koordinačių ir tenzorinio skaičiavimo. Geometrinė al-gebra taip pat labai sėkmingai taikoma sprendžiant sudėtingus robotikos, objektųatpažinimo ir kompiuterinės grafikos uždavinius.
Jei jau nauja matematinė kalba tokia ideali (ji dar vadinama XXI a. univer-salia matematine kalba), tai kyla klausimas, kodėl šiandien geometrinė algebradėstoma tik didžiausiuosepasaulio universitetuose? Priežasčių rastume ne vieną.Pirmiausia, kam mokytis naujos kalbos, jei viską, tegu ir naudojant kelis kartusdaugiau simbolių ir sudėtingesnes formules, galima pasakyti senąja kalba — ta,kuria tave patį mokė universitete? Antra, seni įpročiai neišnyksta, kol jų ilgainiui

ii
nenustelbia neginčijami naujo požiūrio pranašumai. O tai ilgas procesas. Kitavertus, yra per mažai knygų, nors anglų kalba tokios literatūros jau yra ir visainemažai. Knygos gale skaitytojas ras tokių knygų sąrašą, padėsiantį jam toliaugilintis į naują matematikos šaką.
Knyga, kurią laikote savo rankose, yra pirmoji šiam metodui skirta knyga lie-tuvių kalba. Ji supažindina skaitytoją su geometrine algebra ir jos taikymu įvai-riose fizikos srityse. Matematinė ir taikomoji dalys knygoje nėra atskirtos vienanuo kitos. Stengėmės, kad jos viena kitą papildytų: susipažinus su geometrinėsalgebros matematiniu aparatu, iš karto stengėmės pademonstruoti kaip jį taikyti,performuluojant įvairias fizikines teorijas ir sprendžiant uždavinius.
Knyga skirta tiksliųjų mokslų studentams ir specialistams norintiems susipa-žinti su nauja, paprasta ir universalia matematine kalba bei jos taikymu fizikoje.Sunkesni skyriai, kuriuos pirmą kartą skaitant galima praleisti, pažymėti žvaigž-dute. Knygą lydi Mathematica kalba parašyti sąsiuviniai ir programinis paketas,skirtas skaičiavimams geometrinėje algebroje palengvinti, kurį galite atsisiųstiiš http://mokslasplius.lt/files/GA.html portalo. Lietuvių kalbaMathematica aprašyta knygoje [4].
Autoriai nuoširdžiai dėkoja dr. Juliui Ruseckui ir dr. Valdui Jonauskui savodalykinėmis pastabomis padėjusiems pagerinti knygos turinį. Ypatingai esamedėkingi dr. Laimai Kuzmickytei, atidžiai perskaičiusiai rankraštį ir ištaisiusiaikalbos klaidas.
Vilnius, 2015 gegužis

iii
TurinysĮžanga i
1. Pirmoji pažintis su geometrine algebra 11.1. Tylioji multivektorių revoliucija 11.2. Geometrinė, vidinė ir išorinė vektorių sandaugos 31.3. Multivektorius 91.4. Skaičiavimo pavyzdžiai planimetrijoje 121.5. Dar keletas argumentų, kodėl verta mokytis geometrinės algebros 14
2. Svarbiausios geometrinės algebros sąvokos ir aksiomos 172.1. Vektoriai ir tiesinės erdvės 172.2. Multivektorių sudėtis 262.3. Tiesinės funkcijos 262.4. Žymėjimai ir terminai 31
3. Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 353.1. Cl2,0 algebra. Planimetrija 353.2. Multivektorių daugyba 373.3. Multivektoriaus norma 393.4. Vidinės ir išorinės sandaugos trigonometrinis pavidalas 403.5. Ortogonalioji projekcija ir rejekcija 413.6. Atspindys ir vektoriaus sukimas plokštumoje 433.7. Trikampis 453.8. Cl0,2 algebra 473.9. Kvaternionai 493.10. Cl1,1 algebra 543.11. Bazės vaizdavimas matricomis 56
4. Trimatė erdvė. Cl3,0 algebra 594.1. Cl3,0 bazė 594.2. Veiksmai su baziniais elementais 604.3. Elementarios multivektoriaus funkcijos 754.4. Multivektorinės lygtys 774.5. Atspindžiai ir sukimai 804.6. Bivektorių atspindys ir sukimas 844.7. Rotoriaus konstravimas 864.8. Transformacijos vektorius-vektorius ir bivektorius-bivektorius 88

iv
5. Klasikinė mechanika. Trajektorijos ir sukimai 915.1. Tiesės, plokštumos, sferos ir antros eilės paviršiai 915.2. Multivektorių priklausomybė nuo parametro (laiko) 955.3. Jėgos klasikinėje mechanikoje 985.4. Sviedinio trajektorija 1005.5. Elektronas magnetiniame lauke 1015.6. Dvimatis osciliatorius. Elipsinės trajektorijos 1055.7. Centrinės jėgos. Keplerio uždavinys 1075.8. Ryšys su Eulerio kampais 1125.9. Standžiojo kūno sukimasis ir jo rotorius 114
6. Laukai: kaip juos diferencijuoti bei integruoti 1196.1. Laukai — skaliariniai, vektoriniai, bivektoriniai ir kitokie 1196.2. Diferencijavimas ir nabla operatorius 1216.3. Orientuotas integravimas išilgai kreivės 1306.4. Dualioji bazė. Metrika⋆ 1346.5. Diferencijavimas kreivoje erdvėje 1426.6. Orientuotas integravimas išilgai paviršių⋆ 145
7. Elektromagnetinis laukas ir Cl3,0 algebra 1497.1. Maxwello lygtys Cl3,0 algebroje 1497.2. Bėgančios bangos ir jų poliarizacija 1587.3. Kraštinės sąlygos 1667.4. Snellio ir Fresnelio formulės 169
8. Schrödingerio-Paulio kvantinė mechanika 1758.1. Paulio matricos 1758.2. Spinoriai 1788.3. Kvaternioninė kvantinė mechanika 1818.4. Daugiau taisyklių 1838.5. Dviejų lygmenų modelis 1858.6. Schrödingerio-Paulio lygtis 1948.7. Sukinys kvantiniame šulinyje 199
9. Cl1,3 algebra ir reliatyvumo teorija 2059.1. Cl1,3 algebra 2059.2. Erdvėlaikis, įvykiai ir invariantiniai intervalai 2109.3. Lorentzo transformacija arba sukimai erdvėlaikyje 2149.4. Ką matuoja skirtingų inercinių koordinačių sistemų stebėtojai? 2219.5. Erdvėlaikio perskėlimas 229

v
9.6. Reliatyvistinės dalelės kinematika⋆ 235
10. Reliatyvistinė elektrodinamika 24110.1. Maxwello lygtys Cl1,3 algebroje 24110.2. Lauko F savybės ir keturmatis potencialas 24610.3. Elektrinio ir magnetinio lauko priklausomybė nuo greičio 24910.4. Elementaraus krūvio reliatyvistinės judėjimo trajektorijos 25210.5. Plokščia elektromagnetinė banga ir jos poliarizacija 25910.6. Elektromagnetinį lauką spinduliuojantis krūvis⋆ 262
11. Diraco lygtis 27311.1. Spinoriai Cl1,3 algebroje 27311.2. Invariantai ir stebiniai 27811.3. Diraco ir Diraco-Hestenes lygtis elektronui 28311.4. Plokščia elektroninė banga 28711.5. Atspindys nuo potencinio laiptelio 29411.6. Kitos reliatyvistinės lygtys 296
12. Clp,q algebros 29912.1. Multivektorius ir jo dalys 29912.2. Involiucijos 30512.3. Sandaugos geometrinėje algebroje 30812.4. Kitos geometrinėje algebroje naudojamos sandaugos 31612.5. Cliffordo algebrų klasifikacija 32112.6. Pagrindinė analizės teorema. Orientuotasis integralas⋆ 32812.7. Fundamentalusis vektorinis diferencialinis operatorius ∇ 33512.8. Holomorfiškumo savybė ir bekoordinatinis išvestinės apibrėžimas⋆ 33912.9. Vietoje pabaigos 341
13. Priedas 34513.1. Cl3,0 ir Cl1,3 algebrų savybės 34513.2. Bendrieji vektoriai ir bivektoriai 34713.3. Vektorių sandaugos 34813.4. Sandaugos su bivektoriais 34913.5. Bendrosios menčių savybės 35013.6. Kvaternionai 35213.7. ∇ savybės 35213.8. Formulių prastinimas ir pertvarkymas 35313.9. Rekomenduojama literatūra 355

vi
Žymenys 357Literatūra 361Rodyklė 367

1. Pirmoji pažintis su geometrine algebra
1.1. Tylioji multivektorių revoliucija
Skaliarinį fizikinį dydį (pavyzdžiui, temperatūrą) nusako vienintelis skaičius.Tačiau norint apibrėžti dalelės greitį vieno skaičiaus jau nepakanka. Reikia ži-noti tiek greičio dydį, tiek jo kryptį. Todėl greitis yra vektorius, kurį grafiškaidažniausiai vaizduojam strėlyte. Su vektoriaus sąvoka susipažįstama dar mokyk-loje, o vektorinis skaičiavimas jau seniai tapo privaloma universitetinių studijųdalimi [1–3]. Vektorinis skaičiavimas plačiai taikomas tiksliuosiuose moksluose(mechanikoje, hidrodinamikoje, elektrotechnikoje, elektromagnetinio lauko teo-rijoje), nes jis leidžia labai glaustai, nenaudojant koordinačių, užrašyti matema-tinius sąryšius tarp fizikinių dydžių. Puikus pavyzdys yra garsiosios Maxwelloelektromagnetinio lauko lygtys. Maxwellas jas užrašė koordinatiniu pavidalu.Tai buvo 20 diferencialinių lygčių, priklausančių nuo 20-ies nežinomųjų, kuriosvos tilpo į vieną knygos puslapį. Vėliau O. Heaviside’as, pritaikęs vektorinį skai-čiavimą, visas jas sutalpino į maždaug penketą eilučių. Perrašytose lygtyse neli-ko priklausomybės nuo koordinačių sistemos. Tai didelis privalumas, nes gam-tos dėsniai ir neturi priklausyti nuo pasirinktos konkrečios koordinačių sistemos.Bekoordinatinis metodas leidžia formulėms suteikti geometrinę interpretaciją.Pavyzdžiui, elektrinį lauką mes vaizduojame poliniais vektoriais ar jų pluošteliu,o magnetinį — aksialiniais vektoriais1. Deja, universitetuose dėstomas vektori-nis skaičiavimas yra ribotas. Pavyzdžiui, jis neleidžia užrašyti Maxwello lygčiųreliatyvistiniu greičiu judančiam įelektrintam kūnui. Todėl reliatyvistinei elekt-rodinamikai vektorinis skaičiavimas netinka. Tenka mokytis naujos matematikos— tenzorinio skaičiavimo. Pastarajam, deja, būtina koordinačių sistema, todėlprarandamas paprastumas ir geometriniai objektų vaizdiniai.
1Poliniai ir aksialiniai vektoriai skirtingai elgiasi atspindžio metu. Būtent, atspindėjus koor-dinačių sistemą poliniai vektoriai keičia kryptį, o aksialiniai — ne. Šią painiavą sąlygoja mūsųnoras magnetinį lauką įsivaizduoti vektoriumi, kurio vaizdinys kyla iš eksperimento su magnetu irgeležies drožlėmis. Kaip netrukus įsitikinsime, magnetinis laukas yra visai ne vektorius, o bivek-torius. Tik trimatėje erdvėje jam galima surasti vektorių primenantį atitikmenį, aksialinį vektorių,taip paplitusį fizikos vadovėliuose.
1

2 1 skyrius
a) b) c)1.1 pav. a) Vektoriusa kaip orientuota atkarpa. Jo dydžiu laikomas strėlės ilgis|a| = OA. b) Bivektoriaus a ∧ b vaizdavimas orientuota plokštuma. Jo dydisyra lygiagretainio plotas. c) Trivektoriaus a ∧ b ∧ c vaizdavimas orientuotugretasieniu. Jo orientaciją lemia kokią — kairinę ar dešininę — koordinačiųsistemą sudaro vektoriai a, b ir c, o dydį — gretasienio tūris
Antroje dvidešimtojo amžiaus pusėje vektoriniame skaičiavime įvyko tyli re-voliucija, sukūrusi naują universalų matematinį aparatą, vadinamą geometrine al-gebra. Šiuo metu jis labai sėkmingai taikomasmatematikoje, fizikoje bei kompiu-terijoje. Kadangi revoliucija buvo tyli, nieko nuostabaus, kad daug kas jos visai irnepastebėjo. Svarbiausi geometrinės algebros objektai yra multivektoriai. Bend-rai kalbant, tai ne kas kita kaip tam tikru būdu orientuotos tiesės, plokštumos,tūriai ir hipertūriai (ar hiperplokštumos) daugiamatėse erdvėse. Kaip matome iš1.1 pav., vektorių galime įsivaizduoti kaip orientuotą vienmatę hiperplokštumą, oskaliarą (realųjį skaičių) — kaip nulinę hiperplokštumą, kurios orientacija neapi-brėžta. Kiekvieną tokią hiperplokštumą charakterizuoja jos dydis (skaliaras) irkryptis. Dydį apibrėžia strėlės ilgis, lygiagretainio plotas, gretasienio tūris ir t. t.Kryptį savo ruožtu nusako dvi orientacijos: 1) hiperplokštumos padėtis arba josišorinė orientacija erdvėje (angl. attitude) ir 2) vidinė orientacija, kuri įgyja tikdvi vertes: „prieš“ (−1) ir „pagal“ (+1). Toliau žodį „orientacija“ suprasime bū-tent kaip vidinę hiperplokštumos savybę, o daugiamatės plokštumos orientacijąerdvėje vadinsime „padėtimi“. Pavyzdžiui, 1.1a pav. vektorių apibrėžia tiesės (jipiešinyje nepavaizduota) padėtis erdvėje (paveikslo plokštumoje) ir vidinė orien-tacija (į vieną ir į kitą pusę) toje tiesėje. Savo ruožtu vidinę orientaciją nusakoarba galiniai taškai (nuo O į A, arba nuo A į O), atitinkamai + ir − ženklai, ar-ba, kaip dažniausiai įsivaizduojame, strėlės kryptis. Tokiu būdu trijų vektorių a,−a, 2a padėtis yra tokia pati. Vektorių a ir −a orientacijos yra priešingos, ovektorių a ir 2a orientacijos sutampa.
Sudėtingesnisobjektas yra bivektorius, pavaizduotas1.1b paveiksle. Tai baig-tinio dydžio orientuota plokštuma, kurioje guli vektoriai a ir b. Bivektoriaus,kurį žymėsime simboliu a ∧ b, dydį nusako tų vektorių apribotas lygiagretainioplotas. Plokštumos kryptį vėlgi nusako jos padėtis erdvėje kitų plokštumų atžvil-giu ir jos vidinė orientacija. Pastaroji, paprastai kalbant, yra tiesiog plokštumos

Pirmoji pažintis su geometrine algebra 3
apėjimo kryptis — prieš arba pagal laikrodžio rodyklę. Akivaizdu, kad apėjimokryptis niekaip nesusijusi su plokštumos padėtimi erdvėje, todėl bivektorių, kaipvėliau įsitikinsime, taip pat galima įsivaizduoti ir kaip diską, kurio abu paviršiainuspalvinti skirtingomis spalvomis.
Dar sudėtingesnis geometrinis objektas yra trivektorius a ∧ b ∧ c, kurį pa-vaizdavome 1.1c paveiksle. Tai tam tikru būdu orientuotas tūris. Trivektorių irgicharakterizuoja jo dydis ir orientacija. Trivektoriaus dydį nusako lygiagretainiogretasienio, kurio kraštinės sutampa su vektoriais a, b ir c, tūris (skaičius). Vi-dinę orientaciją lemia, kokią — kairinę ar dešininę — sistemą sudaro išvardytivektoriai. Didesnėje nei trijų matavimų erdvėje galima įvesti dar sudėtingesnį ob-jektą — keturvektorių. Keturvektorių galima nupiešti tik keturmatėje (4D) erdvė-je, tačiau galime įsivaizduoti įvairias jo projekcijas į trimatę erdvę. Matematiškaiketurvektorių vėlgi nusako dydis (keturmatis tūris) ir kryptis. Taigi, aiškėja to-kia orientuotų hiperplokštumų ir tūrių bendra struktūra: trimatėje erdvėje gali„gyventi“ tik skaliarai, vektoriai, bivektoriai ir trivektoriai. Keturmatėje erdvėješią schemą tektų papildyti keturvektoriais, o didesnėse erdvėse atitinkamai pri-dėtume vis didesnės dimensijos orientuotas hiperplokštumas. Apibendrintai visitokie geometriniai objektai ir formalios jų kombinacijos (kurios kaip ir realio-ji bei menamoji dalys kompleksiniuose skaičiuose formaliai sujungiamos sumosženklu) vadinami multivektoriais.
Kaip netrukus matysime, multivektoriai padės mums užrašyti bekoordinati-nius ryšius tarp pačių įvairiausių fizikinių dydžių, net ir tenzorinių. Kadangi jiepritaikyti daugiamatėms erdvėms, pasitelkę multivektorius bekoordinatiniu pa-vidalu nesunkiai galėsime užrašyti labai sudėtingas fizikines lygtis, pavyzdžiui,Einsteino gravitacinę lygtį, ar net sukonstruoti visiškai naujas kvantinės kosmo-logijos lygtis.
1.2. Geometrinė, vidinė ir išorinė vektorių sandaugos
Iš vektorinio skaičiavimo žinome, kad vektorius galima sudauginti dviembūdais: skaliariškai ir vektoriškai. O kaip galima dauginti multivektorius? Tailabai svarbus klausimas, nes iš esmės multivektorių daugyba ir nulemia daugelįlabai patrauklių geometrinės algebros savybių. Paimkime du vektorius a ir b. Jųsandaugą ab vadinsime geometrine sandauga. Matematikai ją vadina Cliffordosandauga. Daugelyjeknygųgeometrinė sandauga žymima paprasčiausiu tarpeliu,todėl, jei formulėje matome du šalia stovinčius vektorius (bendru atveju multi-vektorius), suprasime tai kaip geometrinę sandaugą. Atkreipsime dėmesį, kadgeometrinė sandauga yra nekomutatyvi ab 6= ba, todėl daugiklių tvarka svarbi.Tokią vektorių sandaugą formaliai (netrukus sužinosime, kaip ją reiktų suprasti)

4 1 skyrius
visada galima išskaidyti į simetrinės ir antisimetrinės dalių sumą:
ab =1
2(ab+ ba) +
1
2(ab− ba) (1.1a)
≡ a · b+ a ∧ b . (1.1b)
Paskutinę formulę (1.1b) užrašėm geometrinės algebros simboliais. Matome, kadsimetriniame naryje a · b = 1
2 (ab+ ba) vektorius a ir b sukeitus vietomis jisnesikeičia, t. y. a·b = b·a. Šį simetrinį narį vadinsime vidine vektorių sandauga(angl. inner product). Tradicinio vektorinio skaičiavimo požiūriu ji atitiktų geraižinomą skaliarinę vektorių sandaugą, tačiau, kaip matysim, vidinė sandauga yrabendresnė ir ją galima apibrėžti multivektoriams. Vektorių vidinės sandaugosrezultatas yra realusis skaičius (a · b) ∈ R. Jei vektorius a ir b užrašysime kaipvektoriaus modulio |a| (ilgio) ir vienetinio vektoriaus a (krypties) sandaugas,a = |a|a ir b = |b|a, tai vidinės sandaugos simetriškumo savybę vektoriamsgalėsime užrašyti įvairiais pavidalais:
a · b = |b|a · b = |a||b|a · b = |a||b|b · a = |a|b · a = b · a . (1.2)
Pertvarkydami pasinaudojome savybe, kad |a| ir |b| yra skaliarai, o šie visadakomutuoja su vektoriais.
Vektoriųa ir b projekcijos į atitinkamų vienetiniųvektorių kryptis yra a·b =|a| cosϕ ir b · a = |b| cosϕ, todėl dviejų vektorių vidinės sandaugos (1.2)geometrinę prasmę paaiškina 1.2 paveikslas. Iš jo matome, kad vektorių ilgiųsantykis lygus jų atitinkamų projekcijų santykiui: |a|/|b|= (a · b)/(b · a). To-
1.2 pav. Vektorių a ir b vidinėssandaugos a · b = b · a geo-metrinė interpretacija. Projekci-jų ilgiai yra a · b = |a| cosϕ irb · a = |b| cosϕ
kiu būdu vektoriaus ir vienetinio vektoriaus vi-dinė sandauga yra skaliaras, kurį geometriš-kai įsivaizduojame kaip to vektoriaus projek-ciją į vienetinio vektoriaus kryptį. Tradicinia-me vektoriniame skaičiavime vektoriaus kvad-ratas tenkina papildomą sąlygą a2 = a · a =|a|2 > 0, t. y. vektoriaus kvadratas laikomasteigiamu skaičiumi. Be to, a2 = 0 tik tuo at-veju, jei modulis lygus nuliui, |a| = 0. To-kią savybę tenkinančios erdvės vadinamos euk-lidinėmis. Geometrinėje algebroje erdvės ga-li ir nebūti euklidinės. Tokia, pavyzdžiui, yrareliatyvumo teorijos erdvė, kurioje vektoriauskvadratas gali būti ir neigiamas skaičius. Todėljokių papildomų apribojimų vektoriaus kvad-ratui a2 = aa = a · a neįvesime.

Pirmoji pažintis su geometrine algebra 5
1.3 pav. Bivektoriai a ∧ b
ir b ∧ a vaizduojami tais pa-čiais, tačiau priešingai orien-tuotais lygiagretainiais. Bi-vektorių orientaciją rodo lan-ko rodyklė
a) b)
Antrasis (1.1b) formulės dėmuo, a ∧ b = 12(ab − ba), vadinamas bivek-
toriumi. Jis antisimetrinis, nes sukeitus vektorius vietomis išraiškos ženklas pa-sikeičia, a ∧ b = −b ∧ a. Kaip matysime vėliau, sandauga a ∧ b, kurią va-dinsime išorine arba pleištine sandauga (angl. outer, wedge product), tam tikrubūdu susijusi su tradicine vektorine vektorių sandauga, paprastai žymima kry-žiuku. Pastaroji sukeitus vektorius vietomis irgi keičia ženklą, a× b = −b×a.Geometrinėje algebroje sandauga a ∧ b interpretuojama kaip orientuotas plo-tas, kurį nusako du vektoriai a ir b. Tokį orientuotą plotą žymėsime rašytinėmisraidėmis, pavyzdžiui, B = a ∧ b. Bivektorių dažnai įsivaizduosime kaip orien-tuotą lygiagretainį, kaip tai parodyta 1.3 paveiksle. Iš tikrųjų ploto forma nėrasvarbi. Svarbu, kad nesikeistų jo dydis ir vektorių a ir b eiliškumas, t. y. vidi-nė orientacija. Bivektoriaus orientaciją apibrėšime susitarę, kuria tvarka einamenuo pirmojo vektoriaus prie antrojo, abu juos perkėlus į tą patį tašką, pavyzdžiui,koordinačių pradžią O. Sandauga a ∧ b laikoma teigiama, kai a sukame link b
mažiausiu kampu prieš laikrodžio rodyklę, kaip tai parodyta 1.3a paveiksle. Su-kimo kryptį lengva nustatyti antrojo vektoriaus pradžią sutapatinus su pirmojovektoriaus galu, tarsi atliekant sudėtį. Antrojo vektoriaus užlinkimo kryptis irparodo bivektoriaus orientaciją. Tuo tarpu iš 1.3b pav. matyti, kad bivektoriausb∧a orientacija yra neigiama, nes pirmąjį vektorių link antrojo mažiausiu kampusukame pagal laikrodžio rodyklę. Du bivektoriai B ir B′ yra lygūs, B = B′, tiktada, kai jų padėtys ir vidinės orientacijos sutampa, o plotai lygūs. Jei nagrinė-jame bivektorių trimatėje erdvėje, jo orientaciją galima pavaizduoti ir skirtingainuspalvinus abi plokštumos puses. Nesvarbu, kaip orientaciją pavaizduosime, jiyra vidinė multivektoriaus charakteristika, niekaip nesusijusi su erdvės, kuriojesprendžiame uždavinį, savybėmis. Geometrijos vadovėliuose dar nuo Euklidolaikų mokoma, kaip reiktų samprotauti ir elgtis su neorientuotais objektais (tie-sėmis, paviršiais, tūriais). Tačiau tik orientuotų geometrinių objektų įvedimasleido nuosekliai algebrą susieti su geometrija ir išvystyti diferencialinį ir integra-linį skaičiavimą daugiamatėse erdvėse [5].
Iš (1.1) formulės išskaidymo išplaukia, kad sandaugą ba galima užrašyti to-kiais pavidalais:
ba = b · a+ b ∧ a = a · b− a ∧ b. (1.3)

6 1 skyrius
Iš čia matome, kad geometrinė sandauga, apskritai kalbant, nėra komutatyvi,ba 6= ab. Pertvarkant formules šią savybę visą laiką reikia turėti omenyje. Aiš-ku, algebros nekomutatyvumas gerokai apsunkina skaičiavimus. Deja, komplek-sinių skaičių algebra yra paskutinė komutatyvi algebra. Įrodyta, kad visuose norskiek didesniuose apibendrinimuose nekomutatyvumo savybės išvengti neįmano-ma. Pavyzdžiui, matricinis skaičiavimas taip pat nėra komutatyvus.
Formules (1.1b) ir (1.3) galima laikyti geometrinės sandaugos apibrėžimuvektoriams, todėl jas perrašysime dar kartą:
a b = a · b+ a ∧ b,b a = a · b− a ∧ b.
GEOMETRINĖ VEKTORIŲ SANDAUGA (1.4)
Pasinaudoję jomis vidinę ir išorinę sandaugas išreiškiame geometrinėmis san-daugomis:
a · b = 12 (ab+ ba), (1.5)
a ∧ b = 12 (ab− ba). (1.6)
Šios formulės, kaip matėme, suteikia geometrinę interpretaciją geometrinei san-daugai. Jei vektoriai yra lygiagretūs, jų apibrėžiamas plotas lygus nuliui, a∧b =0, todėl
ab = ba, jei a ‖ b. (1.7)
Jei a = b, turime a ·a = a2 = |a|2. Geometriškai šis atsakymas akivaizdus:vektoriaus kvadratas lygus jo modulio kvadratui. Tuo tarpu a ∧ a = 0.
Jei vektoriai statmeni, vieno vektoriaus projekcija į kitą lygi nuliui, a ·b = 0,todėl
ab = −ba, jei a ⊥ b. (1.8)
Galima galvoti ir atvirkščiai. Jei du vektoriai komutuoja, reiškia, jie vienas kitamlygiagretūs. Jei vektoriai antikomutuoja, vadinasi, jie vienas kitam statmeni. Na,o jei vektoriai nei statmeni, nei lygiagretūs, tada turime tarpinį rezultatą. Tokiuatveju nekomutatyvinėje geometrinėje sandaugoje ab vektorių sukeisti vietomisbendrai paėmus negalima. Su formulėmis, panašiomis į (1.5)–(1.8), geometrinėjealgebroje susidursime labai dažnai. Jos leidžia daryti išvadą, kad geometrinėjesandaugoje yra užkoduota visa informacija apie vektorių išsidėstymą vienas kitoatžvilgiu, tame tarpe, kaip minėjom, jų lygiagretumo ir statmenumo savybės.
Kodėl gi geometrinė sandauga yra tokia svarbi? Algebros požiūriu atsaky-mas būtų toks: geometrinę sandaugą galima invertuoti. Kitaip tariant, pavyz-džiui, žinodami vektorių a iš lygties xa = 1 galime surasti nežinomą vektoriųx. Kadangi daugelyje matematinių uždavinių tenka spręsti panašias vektorineslygtis, ši savybė yra nepaprastai svarbi. Žinant tik vieną iš sandaugų — vidinę ar

Pirmoji pažintis su geometrine algebra 7
a) b) c)
1.4 pav. Nežinomo vektoriaus x radimas, žinant vidinę ir išorinę sandaugas.a) Vidinė sandaugaa·x nepasikeičia prie vektoriausx pridėjus bet kokįvektoriųb, lygiagretų neapibrėžtumo tiesei RS ⊥ a. b) Išorinė sandauga a ∧ x nepa-sikeičia prie vektoriaus x pridėjus a. Dabar neapibrėžtumo tiesė yra OP ‖ a.c) Žinant abi sandaugas — išorinę ir vidinę — ieškomą vektorių x vienareikš-miškai randame iš neapibrėžtumo tiesių OP ‖ a ir RS ⊥ a susikirtimo taško
išorinę — vienareikšmiškai nežinomo vektoriaus surasti neįmanoma. Tai lengvasuprasti iš 1.4 paveikslo. Žinodami tik skaliarinę dviejų vektorių sandaugą x ·a,kito vektoriaus vienareikšiai nustatyti negalime, nes, kaip matyti iš 1.4a pav., prienežinomo vektoriaus x pridėjus bet kokį vektorių b, statmeną vektoriuia, vidinėsandauga nepasikeičia, t. y. (x+b) ·a = x ·a, jei b ⊥ a. Taigi, šiuo atveju mūsųneapibrėžtumas yra linija RS. Didesnio matavimo erdvėje ją pakeistų vektoriuiastatmena hiperplokštuma.
Kita vertus, jei žinome tik išorinę vektorių sandaugąx∧a, tada, kaip matytiiš 1.4b pav., prie nežinomo vektoriaus x pridėję vektorių a, padaugintą iš betkokio skaičiaus λ, visada gauname tą patį rezultatą (x+ λa) ∧ a = x ∧ a, nes,kaip matėme iš (1.7) formulės, lygiagrečių vektorių išorinė sandauga lygi nuliui.Tai iliustruoja geometrinį teiginį, kad du lygiagretūs vektoriai ploto neapibrėžia.Paveikslas 1.4b vaizduoja tokį atvejį, kai λ = 6
5 . Keičiant λ vertę vektoriusa′ = a juda išilgai neapibrėžtumo tiesės OP, tačiau naujo lygiagretainio B′ =a∧ (x+λa) plotas nesikeičia ir išlieka lygus pradinio lygiagretainioB = a∧x
plotui.Ir tik tuo atveju, kai žinome abi sandaugas a · x ir a ∧ x, tik tada gali-
me vienareikšmiškai surasti tašką x, kuriame kertasi abi neapibrėžtumo tiesės,1.4c pav. Taigi, tik geometrinė vektorių sandauga pilnai apibrėžia vektorius xir a, ir leidžia išspręsti lygtį xa = 1. Žinoma, jei nagrinėjame atskirus atvejus,pavyzdžiui, imame tarpusavyje lygiagrečius ar statmenus a ir b vektorius, tadageometrinė vektorių sandauga sutampa su vidine ar išorine sandauga, kaip rodo(1.7) ir (1.8) formulės.

8 1 skyrius
a) b)
1.5 pav. Skirtingi požiūriai į trimatę erdvę.a) Senojo vektorinio skaičiavimo ortų i, j ,kdauginti negalime. b) Geometrinės algebrosbaziniai vektoriai e1, e2, e3 vaizduojami ly-giai taip pat, tačiau kai i 6= j, baziniai vektoriaiantikomutuoja, ei ej = −ej ei, o kai i = j,galime pasirinkti, e2i = ±1
Kita svarbi geometrinės sandaugos savybė yra asociatyvumas. Sakoma, kadsandauga yra asociatyvi, jei bet kokiems vektoriams a, b ir c, ji tenkina lygybę
(a b) c = a (b c). (1.9)
Kitaip tariant, asociatyvumas yra savybė, reiškianti, kad rezultatas nepriklausonuo to, kuriuos iš vektorių sudauginame pirmiau, o kuriuos vėliau. Taigi skliaus-teliai (1.9) formulėje nėra reikalingi, todėl rašysime tiesiog abc.
Geometrinėje algebroje, kaip jau minėjome, atsiranda galimybė pasirinktierdvę su tam tikromis iš anksto užduotomis savybėmis. Trumpai aptarsim, kaiptai daroma. Pirmiausia įveskime stačiakampę 3D koordinačių sistemą, kuriosortai e1, e2, e3 (geometrinėje algebroje juos sutarta vadinti baziniais vektoriais),kaip parodyta 1.5b pav. Manysime, kad baziniai vektoriai ei, panašiai kaip ortaivektoriniame skaičiavime, visada yra ortogonalūs, t. y, tenkina sąlygas
e1 · e2 = e2 · e3 = e3 · e1 = 0. (1.10)
Skirtingai nuo tradicinio vektorinio skaičiavimo, geometrinėje algebroje baziniusvektorius galima dauginti. Bazinių vektorių kvadratai yra skaliarai. Kvadratųženklus (plius arba minus), o tuo pačiu ir erdvės savybes, galime pasirinkti savonuožiūra. Kadangi baziniai vektoriai normuoti, jų kvadratus prilyginsime arbaplius vienetui (teigiama signatūra), arba2 minus vienetui (neigiama signatūra):
e1 e1 = e21 = e22 = e23 = e3 · e3 = ±1. (1.11)
Dabar, pasinaudoję ortų ortogonalumo savybe, užrašysime trūkstamas vektoriųe1, e2 ir e3 geometrines sandaugas, kai i 6= j:
ei ej = ei · ej + ei ∧ ej = ei ∧ ej = −ej ∧ ei = −ej ei. (1.12)
Taigi, baziniai vektoriai antikomutuoja, o jų kvadratai nusako erdvės signatūrą.Kai visi e2i = +1, sakoma, kad erdvė yra Euklido. Trimatės Euklido erdvės al-gebra žymima Cl3,0. Ši algebra yra labai panaši į Paulio matricų σi algebrą. Pri-minsime, kad Paulio matricos plačiai naudojamoskvantinėjemechanikoje. Jomis
2Griežtai kalbant, dar reikėtų pridėti ir bazinius vektorius, kurių kvadratas lygus nuliui, tačiaufizikoje algebros su nuline signatūra mažai paplitusios.

Pirmoji pažintis su geometrine algebra 9
aprašomas, pavyzdžiui, elektrono sukinys. Trimatėje Euklido erdvėje iš baziniųvektorių e1, e2, e3 sukonstruota algebra yra izomorfiška (paprastai kalbant, su-tampa) Paulio matricų algebrai. Dėl šios priežasties tokių erdvių baziniai vekto-riai dažnai žymimi simboliais σ1,σ2,σ3. Minkowskio vardu yra vadinamaketurmatė erdvė, kurios trijų bazinių vektorių kvadratai e21 = e22 = e23 = −1,o ketvirtojo e24 = +1. Šios erdvės geometrinė algebra žymima Cl1,3. Taigi,geometrinė sandauga įskaito daugiau savybių, kuriomis pasižymi nagrinėjamafizikinė ar matematinė erdvė. Kaip matysime vėliau, nors formalus matemati-nis aparatas visose geometrinėse algebrose yra lygiai toks pats (štai kodėl vertaįvaldyti šį universalų matematinį instrumentą), galutiniai atsakymai ir išvadospriklauso nuo to, kokios signatūros erdvėje dirbame, todėl gali iš esmės skirtis.
1.3. Multivektorius
Kadangi geometrinės algebros metodais skaičiuotidar beveik nemokame, pa-nagrinėkime paprasčiausią trijų vektorių išorinę sandaugą, kai vektoriai a, b ir cyra tarpusavyje ortogonalūs. Paimkime juos lygiagrečius baziniams vektoriamse1, e2 ir e3. Vektoriaus a ilgį pažymėję raide a galime rašyti a = ae1 ir, pa-našiai, b = be2 ir c = ce3. Kadangi nėra jokio skirtumo, kuriuos iš vektoriųpirmiau antisimetrizuojame: pirma e1 su e2, o po to gautą rezultatą su e3, arpirma e2 su e3, o po to rezultatą su e1 (tačiau vektorių tvarkos keisti negalima),gauname
abc = (abc)(e1∧e2)∧e3 = (abc)e1∧ (e2 ∧e3) ≡ (abc)e1∧e2 ∧e3. (1.13)
Šiuo atveju dydis abc yra skaliaras. Tai stačiakampio gretasienio, kurio kraštinėsyra vektoriai a, b ir c, tūris. Jei vienetinio ilgio vektorius ei įsivaizdavome kaipkryptines atkarpas, ei ∧ ej kaip vienetinio ploto orientuotas plokštumas, tai ob-jektą e1 ∧e2 ∧e3 reiktų laikyti orientuotu vienetiniu kubu (žr. 1.1c pav.). Tačiaukaip įsivaizduoti kubo orientaciją? Aišku, su kubo padėtimi erdvėje ši savybė ne-turi nieko bendra. Kaip jau žinome, priešingai orientuotų vektorių strėlės rodo įpriešingas puses. Priešingos orientacijos bivektorių apėjimo kryptys priešingos.O štai priešingų orientacijų tūrius betarpiškai įsivaizduoti kiek sunkiau. Tačiaumatematiškai orientaciją nusakyti visai paprasta. Pakanka prisiminti, jog trima-tėje erdvėje egzistuoja tik dvi koordinačių sistemos — kairinė ir dešininė. Viensukiojant erdvėje jų sutapatinti niekaip neįmanoma. Todėl egzistuoja tik dvi tūrioorientacijos, kurias sąlyginai būtų galima pavadinti teigiama ir neigiama. Kaipir kairinės bei dešininės koordinačių sistemos apibrėžime ją nulemia bazinių tri-vektorių tarpusavio tvarka (žr. 4.3 pav.). Jei trivektorių e1 ∧ e2 ∧ e3 laikysimeteigiamai orientuotu, tai prisiminę išorinės sandaugos antisimetriškumo savybę

10 1 skyrius
ei ∧ej = −ej ∧ei, matome, kad tūris (abc)e2∧e1 ∧e3 = −(abc)e1∧ e2 ∧ e3turi priešingą orientaciją. Kita vertus, tūrio (abc)e3 ∧ e1 ∧ e2 orientacija vėl su-taps su (1.13), nes du kartus perstačius bazinius vektorius trivektoriaus ženklasnepasikeičia, e3∧e1∧e2 = −e1∧e3∧e2 = e1∧e2∧e3. Žinoma, trivektoriausdydžiui (skaliarui) bazinių vektorių perstatinėjimas jokios įtakos nedaro.
Dabar prisiminkime (1.4) apibrėžimą, kuris dviejų vektorių geometrinę san-daugą išskaido į skaliaro ir bivektoriaus sumą. Ar galima būtų sukonstruoti sudė-tingesnius objektus, pridedant dar ir trivektorius? Geometrinės algebros teorijato nedraudžia. Todėl, bendrai kalbant, įvesime objektą, kurį pavadinsime multi-vektoriumi ir žymėsime „sans serif “ spaudmenimis3. Tai skaliaroMs, vektoriausMv, bivektoriaus Mb, trivektoriaus Mt suma
M = Ms +Mv +Mb +Mt. (1.14)
Jei erdvės dimensija didesnė už tris, reikia pridėti keturvektorių ir t. t. Pasirin-kę konkrečią koordinačių sistemą e1, e2, e3, bet kokį 3D erdvės multivekto-rių (1.14) visada galime išskleisti per bazinius elementus (skaliarą, tris vektorius,tris bivektorius ir trivektorių),
Ms = α, (1.15a)
Mv = β1e1 + β2e2 + β3e3, (1.15b)
Mb = γ1e1 ∧ e2 + γ2e2 ∧ e3 + γ3e3 ∧ e1, (1.15c)
Mt = ζe1 ∧ e2 ∧ e3. (1.15d)
Graikiškos raidės skleidiniuose žymi realiuosius skaičius (atitinkamos projekci-jos dydį). Trimatėje erdvėje galima sudaryti tik formulėje (1.15) išvardytus ba-zinius elementus, nepriklausomai nuo to, kiek vektorių-daugiklių dauginsime.Pavyzdžiui, geometriškai sudauginę keturis abcd vektorius naujų objektų trima-tėje erdvėje nepagaminsime. To priežastis paprasta. Tiesiog trimatėje erdvėjeegzistuoja tik trys tiesiškai nepriklausomi vektoriai. Tokie, pavyzdžiui, yra bazi-niai vektoriai e1, e2 ir e3. Jei įvestume dar ir ketvirtą d, tai jį visada galėtumeišreikšti kitų trijų vektorių tiesine kombinacija d = d1e1 + d2e2 + d3e3. Skai-čiuojant keturių vektorių išorinę sandaugą e1 ∧ e2 ∧ e3 ∧ d kiekviename naryjegausime po du vienodus daugiklius e1 ∧ e1, e2 ∧ e2, ar e3 ∧ e3 ir dėl išori-nės sandaugos antisimetriškumo tokie nariai išnyks. Taigi, trimatėje erdvėje galipasirodyti tik (1.15) formulėje surašytos kombinacijos arba jų dalis.
3„Serif“ vadinami trumpi horizontalūs ar vertikalūs brūkšneliai kai kurių raidžių viršuje arapačioje. Pastebėta, kad skaitant jie padeda greičiau suvokti informaciją, todėl knygose daugumateksto rašoma šiais spaudmenimis. Pažodžiui „sans serif “ reiškia raidės „be brūkšnelių“.

Pirmoji pažintis su geometrine algebra 11
1.1 lentelė. Labiausiaipaplitusios geometrinės(Cliffordo) algebros Clp,q.Simboliai p ir q žymisignatūrą, o n = p + qerdvės dimensiją
p q n Algebros paskirtis0 1 1D Kompleksiniai skaičiai2 0 2D Planimetrija0 2 2D Kvaternionai3 0 3D Euklidinė erdvė3 1 4D Relativistinis erdvėlaikis4 1 5D Grafika, konforminė geometrija
Geometrinės algebros knygose visos algebros žymimos santrumpa Clp,q (pa-gal matematiko W. K. Cliffordo pavardę, žr. intarpą 16 psl.). Indeksai rodo,kiek yra bazinių vektorių, kurių kvadratas eiei = ei · ei teigiamas (p indeksas)ir neigiamas (q indeksas). Aišku, kad bet kokioje baigtinėje n-matėje erdvėje,kur n = p + q, išorine sandauga daugiausia galima sudauginti tik n vektorių.Plačiausiai taikomos geometrinės algebros išvardytos 1.1 lentelėje. Pavyzdžiui,skaitytojui gerai žinoma kompleksinių skaičių algebra yra viena iš paprasčiau-sių Cl0,1 geometrinių algebrų. Tuo tarpu W. R. Hamiltono įvesti kvaternionai,turintys net tris skirtingus menamuosius vienetus, sudaro Cl0,2 algebrą (kodėltrims kvaternionams pakanka tik dviejų dimensijų vektorinės erdvės, sužinosime3 skyriuje).
Multivektoriai (1.14) yra pagrindiniai geometrinės algebros žaidėjai. Tačiauiš pirmo žvilgnio gali pasirodyti keista, kad formulėje sudedami neekvivalentiškigeometriniai objektai — skaliaras su vektoriumi, vektorius su orientuotu tūriu irpan. Bet juk lygiai taip pat yra ir su kompleksiniais skaičiais. Jei rašome, pavyz-džiui, 2+3i, tai ir rodo, kad dar labiau „susumuoti“ nemokame. Vaizdžiai kalbantmultivektorius (1.14) yra panašus į krepšį, kuriame sudėti, pavyzdžiui, obuoliaikartu su kriaušėmis. Visada galima atskirti obuolius nuo kriaušių pagal jų spal-vą ar formą. Geometrinėje algebroje tas skiriamasis požymis vadinamas rangu(angl. grade). Vektoriai — tai pirmo rango multivektoriai, arba tiesiog geomet-rinės algebros vektoriai. Bivektoriai (ei ∧ ej tiesinės kombinacijos) — tai antrorango multivektoriai arba 2-vektoriai. Trivektoriaus ortai yra ei∧ej∧ek . Gi ska-liarams (nuliniams vektoriams) „bazinį vektorių“ atstoja paprasčiausias vienetu-kas. Todėl prireikus multivektoriuje (krepšyje) visada lengvai atskirsime vienorango multivektorių nuo kito. Sumuojant šiuos įvairių rangų multivektorius (tamnereikia išreikštai įvesti koordinačių) galima aprašyti net ir labai sudėtingus fizi-kinius objektus. Pavyzdžiui, elektromagnetinis laukas labai kompaktiškai užra-šomas kaip vektoriaus (elektrinio lauko) ir bivektoriaus (magnetinio lauko) sumaCl3,0 algebroje ir kaip bivektorius reliatyvistinėje Cl1,3 algebroje.

12 1 skyrius
1.4. Skaičiavimo pavyzdžiai planimetrijoje
Tam, kad skaitytojas pajustų uždavinių su multivektoriais sprendimo skonį,pateiksim keletą pavyzdžių, kaip geometrinė algebra taikoma tiesinėms algebri-nėms lygtims spręsti.
1.1 pavyzdys. Pirmiausia suraskime vektoriuia, kurio modulio (ilgio) kvadratas yra|a|2, atvirkštinį vektorių a−1. Kadangi rezultatas labai paprastas, tiesiog patikrinkime,kad atvirkštinis vektorius yra a−1 = a/|a|2. Iš tiesų, kadangi a2 = aa = a ·a = |a|2,galime rašyti
a−1a = aa−1 =aa
|a|2 = 1. (1.16)
Taigi, atvirkštinis vektorius yra tas pats vektorius, tik padalintas iš skaičiaus — vekto-riaus ilgio kvadrato |a|2. Iš čia aišku, kad vienetinio vektoriaus a atvirkštinis vektoriusyra pats vektorius, a−1 = a. Priminsim, kad tradiciniame vektoriniame skaičiavimeatvirkštinio vektoriaus sąvokos nėra.
Panašiai galima užrašyti atvirkštinį bivektorių:
(a ∧ b)−1 = − (a ∧ b)
|a ∧ b|2 , (1.17)
kur |a ∧ b| žymi bivektoriaus modulį, kurio geometrinė prasmė yra iš vektorių a ir bsudaryto lygiagretainio plotas. Kadangi −a∧b = b∧a, atvirkštinis bivektorius geomet-riškai vaizduoja priešingos orientacijos paviršių, kurio plotas sumažintas |a∧ b|2 kartų.Aišku, kad vienetinio bivektoriaus B atvirkštinis yra B−1 = −B. Bivektorius rašysimekaligrafinėmis raidėmis.
1.2 pavyzdys. Įsitikinkime, kad statmenų vektorių a ir b antikomutavimas dera suPitagoro teorema. Pagal šią teoremą, trikampio, kurį sudaro statiniai a ir b, įstrižainėyra vektorius c = a + b kurio kvadratas lygus
c2 = (a + b)2 = a2 + ab+ ba + b2. (1.18)
Kadangi vektoriaus kvadratas lygus savo ilgio kvadratui, a2 = |a|2, Pitagoro teorema|c|2 = |a|2 + |b|2 bus teisinga tik tada, jei ab + ba = 0. Kitaip tariant, tai, kadgeometrinėje sandaugoje statmeni vektoriai antikomutuoja, dera su statmenų vektoriųvidinės sandaugos (1.5) apibrėžimu.
1.3 pavyzdys. Tarkime, plokštumoje duoti du nepriklausomi vektoriai a ir b, kuriesudaro neortonormuotą bazę. Jie pavaizduoti 1.6a paveiksle. Punktyrine linija nupieš-tos tiesės yra lygiagrečios vektoriams a ir b, t. y. nusako jų kryptį. Tikslas — žinomąvektorių x išskleisti vektorių a ir b, kurie nebūtinai vienas kitam statmeni, bazėje
x = αa + βb. (1.19)

Pirmoji pažintis su geometrine algebra 13
a) b)
1.6 pav. a) Vektoriaus x skleidimas bazėje a, b. b) Vektorinių lygčių siste-mos (1.26) vizualizacija
Kitaip tariant, nežinomus skaliarinius koeficientusα irβ reikia užrašyti per duotus vekto-rius a, b ir x. Iš brėžinio matyti, kad (1.19) lygtis vaizduoja iš vektorių sudarytą trikam-pį. Pirmiausia išoriškai padauginkime abi šios lygties puses iš kairės iš a. Pasinaudojęsavybe a ∧ a = 0, gauname
a ∧ x = βa ∧ b. (1.20)
Lygtį (1.20) galima išspręsti iš dešinės padauginus iš atvirkštinio bivektoriaus (a∧b)−1
β = (a ∧ x) (a ∧ b)−1 ≡ a ∧ x (a ∧ b)−1. (1.21)
Susitarkime, kad išorinę sandaugą visada apskaičiuojame pirmiau už geometrinę. Dėlšios priežasties vienų lenktinių sklaustelių formulėje galima nerašyti. Išraiška (1.21) turiaiškią geometrinę prasmę: kadangi bivektoriaia∧x ir a∧b suprantami kaip orientuotiploteliai (šiuo atveju gulintys toje pačioje plokštumoje), tai β koeficientas yra ne kas kita,kaip jų plotų santykis. Jei teisinga lygybė a ∧ x (a ∧ b)−1 = (a ∧ b)−1 a ∧ x (o šiuoatveju taip ir yra, nes skaliarą β formulėje (1.20) galime perkelti į kurią norime pusę —nuo to priklauso atvirkštinio daugiklio tvarka), formulę galima gražiau užrašyti įprastutrupmenos pavidalu:
β =a ∧ x
a ∧ b. (1.22)
Žinoma, jei skaitiklyje ir vardiklyje esančių daugiklių tvarka būtų svarbi, toks užrašastaptų dviprasmis, nes nebūtų aišku, kaip dauginti iš atvirkštinio bivektoriaus,— iš kairėsar iš dešinės.
Lygiai tą pačią procedūrą pakartokime išoriškai padaugindami (1.19) lygtį iš b,
b ∧ x = αb ∧ a, (1.23)
kurią išsprendę skaliaro α atžvilgiu, randame
α =b ∧ x
b ∧ a=
b ∧ x
−(a ∧ b)=
x ∧ b
a ∧ b. (1.24)
Taigi, atsakymas yra
x =x ∧ b
a ∧ ba+
a ∧ x
a ∧ bb . (1.25)
Atkreipsime dėmesį, kad vardiklyje esantis bivektorius a ∧ b negali virsti nuliu. O taikaip tik ir reiškia, jog vektoriai a ir b turi sudaryti plokštumą. Kitaip sakant, jie negalibūti lygiagretūs.

14 1 skyrius
1.4 pavyzdys. Dabar išspręsime praktiškesnį uždavinį. Tarkime, plokštumoje nubrėž-tos dvi tiesės (punktyrinės linijos), kurių kryptis nusako vektoriai a ir b, kaip parodyta1.6b paveiksle. Pasakyta, kad pirmoji tiesė turi eiti per tašką P, o antroji — per tašką Q.Taško P padėtį rodo spindulys-vektorius p, o taško Q padėtį — q. Mūsų užduotis —surasti tiesių, einančių per taškus P ir Q, susikirtimo tašką, kurį vaizduoja spindulys-vektoriusx. Žiūrint į brėžinį galima sudaryti tokias tris lygtis:
x = λa + p, (1.26a)
x = µb+ q, (1.26b)
x =x ∧ b
a ∧ ba+
a ∧ x
a ∧ bb . (1.26c)
Kaip matyti iš 1.6b paveikslo, pirmoji lygtis aprašo tiesę, einančią per tašką P, o antroji— tiesę, einančią per tašką Q. Taip pat galima įsivaizduoti, kad lygtys (1.26a) ir (1.26b)aprašo du vektorinius trikampius su viena bendra kraštinex. Trečioji lygtis yra jau mumsžinoma (1.25) vektoriaus x skleidimo baziniais vektoriais a ir b išraiška. Mūsų tikslas— iš užrašytų vektorinių algebrinių lygčių surasti skaliarus λ ir µ. Tuo tikslu pirmąjąlygtį išoriškai padauginę iš a, o antrąją iš b, nesunkiai gauname sąryšius
a ∧ x = a ∧ p, (1.27a)
x ∧ b = q ∧ b . (1.27b)
Bivektoriusa ∧ x ir x ∧ b įstatę į (1.26c) iš karto užrašome atsakymą:
x =q ∧ b
a ∧ ba+
a ∧ p
a ∧ bb . (1.28)
Priminsime, kad bivektorių santykiai prie vektorių interpretuojami kaip plotelių santy-kiai. Mes juos radome išreikštai neįvedę koordinačių: tam pakankama žinoti vektoriųilgius ir kampus tarp jų. Ištikrųjų koordinatės įneštų į uždavinį perteklinę informaci-ją.
Taigi, pasinaudoję bivektoriais nepaprastai lengvai ir elegantiškai, o svar-biausia — išreikštai neįvedę jokių koordinačių — išsprendėme geometrinius už-davinius. Skaitytojas geriau suvoks šių formulių grožį, pamėginęs išspręsti už-davinius tradiciniu būdu.
1.5. Dar keletas argumentų, kodėl verta mokytis geometrinės algebros
Visų pirma, multivektorių įvedimas algebrą padaro labai universalią. Geo-metrinė algebra tinka tiek paprastiems klasikinėsmechanikos uždaviniams, tiek irsudėtingoms kosmologijos problemoms, pavyzdžiui, tokioms kaip fizikinių kū-nų dinamika šalia juodosios skylės, spręsti. Visuose uždaviniuose naudojamasvienas ir tas pats geometrinės algebros matematinis aparatas. Skiriasi tik konkre-čios algebros. Pavyzdžiui, Newtono mechanikos dėsniai formuluojami trimatėje

Pirmoji pažintis su geometrine algebra 15
Euklido erdvėje su teigiama metrika, t. y. Cl3,0 algebroje. Reliatyvumo teorijai,kurios keturmatę erdvę charakterizuoja Minkowskio metrika, pasitelkiama Cl1,3arba Cl3,1 algebra. Svarbu, kad visose teorijose naudojama viena ir ta pati mate-matika. Tuo tarpu klasikiniai vadovėliai vieną teoriją aiškina taikydami tradicinįvektorinį skaičiavimą, o kitai jau naudoja tenzorinį (kuris savo prigimtimi yrakoordinatinis) skaičiavimą. Gamtoje jokių išskirtinių koordinačių nėra: fizikosdėsniai turi būti formuluojami taip, kad jie nuo jokių koordinačių nepriklausy-tų. Todėl paplitęs tenzorinis skaičiavimas aprašydamas reiškinius neišvengiamaiįveda bereikalingą sudėtingumo lygmenį, kurio aprašant gamtos dėsnius visai ne-reikia. Bet dar blogiau tai, kad viską užrašius koordinatėmis dingsta visi mūsųgeometriniai vaizdiniai. Tuo tarpu geometrinėje algebroje koordinačių išreikštaiįvesti nėra būtina.
Antra, geometrinė algebra yra labai efektyvi. Skaičiavimai supaprastėja, oformulės sutrumpėja. Kadangi baziniai objektai turi aiškią geometrinę interpre-taciją, gautas formules dažnai galima įsivaizduoti geometriškai. Tai svarbu, nesdaugelis žmonių mąsto pasitelkdami vaizdinius. Be to, ne tik baziniams ele-mentams (vektoriams, bivektoriams ir t. t.), bet ir jų sumoms (multivektoriams)dažnai galima suteikti aiškią fizikinę prasmę. Priminsim, kad klasikiniame vek-toriniame skaičiavime polinių vektorių (elektrinis laukas) ir aksialinių vektorių(magnetinis laukas) sudėti negalima. Tuo tarpu geometrinėje algebroje jų sumaduoda elektromagnetinio lauko multivektorių. Todėl multivektorinis matemati-nis aprašymas, ypač jei banga sklinda terpėje, kuri transformuoja laukus, tampadaug paprastesnis. Pateiksime dar vieną netrivialų pavyzdį. Elektrono sukiniokaip kvantinio objekto savybės aiškinamos abstrakčios Hilberto erdvės sąvoko-mis. Tuo tarpu pasitelkus Cl3,0 algebrą (Newtono mechanikos algebrą!) gali-ma aprašyti visas sukinio savybes, įskaitant sukinių interferenciją ir kvantiniuskompiuterius, kurių veikimas pagrįstas sukinių sąveika. Taigi, žiūrint bendriau,multivektorius yra kur kas turtingesnis objektas tiek matematine, tiek ir taikymoprasme.
Su tradiciniu vektoriniu skaičiavimu susipažinusiam skaitytojui 1.2 lentelėjepateikiame vektorinio skaičiavimo ir geometrinės algebros Cl3,0 operacijų palygi-nimą. Vektorinę sandaugą žymi kryžiukas. Esminis tokios sandaugos trūkumastas, kad ji apibrėžta tik trimatėje Euklido erdvėje. Jos neįmanoma apibendrintididesnių matavimų ar kitos metrikos erdvėms, pavyzdžiui, reliatyvumo teorijoserdvei. Skaitant šią knygą vektorinio skaičiavimo žinios nėra būtinos. Tačiau jeijį jau mokate, 1.2 lentelė jums padės greičiau suvokti geometrinę algebrą.

16 1 skyrius
Vektorinė sandauga Išorinė sandauga Savybėa× b = −b× a a ∧ b = −b ∧ a Antisimetriškumas
a× a = 0 a ∧ a = 0 Sandauga iš savęs
(a+ b)×c= a×b+ b×c
(a+b) ∧ c= a ∧ b+ b ∧ c Distributyvumas
(a× b)×c6= a× (b× c)
(a ∧ b) ∧ c= a∧ (b ∧ c) Asociatyvumas
sin θ = |a×b||a|2|b|2 sin θ = a∧b√
a2b2Kampas tarp vektorių
A = a× b A = a ∧ b Lygiagretainio plotas
V = (a× b) · c V = a ∧ b ∧ c Gretasienio tūris
Atitikmens nėra a ∧ b ∧ c ∧ d Keturmačio kubo tūris
1.2 lentelė. Vektorinės (×) ir išorinės (∧) sandaugų palyginimas
Žiupsnelis geometrinės algebros istorijos
W. R. Hamilton (Hamiltonas) 1805–1865. Airių matematikas. Išrado kvater-nionus ir kvaternionų algebrą, kurią dabar žymim Cl0,2.
H. G. Grassmann (Grasmanas) 1809–1877. Vokiečių matematikas ir lingvistas.Įvedė apibendrintą išorinę vektorių sandaugą. Domėjosi indoeuropiečių, tarp jųprūsų bei lietuvių kalbomis.
W. K Clifford (Klifordas) 1845–1879. Anglų matematikas. Iš Grassmanno al-gebros suformulavo bendresnę algebrą, kurią matematikai vadina jo vardu. Fi-zikai ją vadina geometrine algebra, t. y. taip, kaip pasiūlė pats Cliffordas.
J. W. Gibbs, O. Heaviside (Gibsas ir Hevisaidas) 1839–1903 ir 1850–1925. Fi-zikai, amerikietis ir anglas. Įvedė vektorinę sandaugą, naudojamą klasikiniamevektoriniame skaičiavime. Perrašė Maxwello elektrodinamiką bekoordinatiniu,dabar visuotinai naudojamu pavidalu.
E. J. Cartan (Kartanas) 1869–1951. Prancūzų matematikas. Pasiūlė daug naujųidėjų į diferencialinę geometriją. Daugelis jų persikėlė į geometrinę algebrą.
D. Hestenes (Hestiniz) g. 1933. Amerikiečių matematikas. Geometrinę algebrąir analizę sujungė į vieną visumą. Geometrinės algebros taikymų klasikinėje irkvantinėje mechanikoje, elektrodinamikoje, reliatyvistinėje teorijoje ir daugely-je kitų sričių pradininkas.

2. Svarbiausios geometrinės algebros sąvokos iraksiomos
Kaip ir kiekvienas matematinis formalizmas geometrinė algebra remiasi visaeile pirminių sąvokų ir neįrodomų teiginių — aksiomų. Knygoje nekėlėme tiks-lo formuluoti teoriją griežtai, kaip tai daroma matematikams skirtose knygose.Skaitytojas, kuris nori kuo greičiau išmokti skaičiuoti, gali šį skyrių praleisti iriš karto peršokti prie kito, kuriame aptariami konkretūs skaičiavimai dvimatėsealgebrose. Skyriuje priminsime tiesinių erdvių, bazės, tiesinės priklausomybėsbei kitas svarbiausias sąvokas ir apibrėžimus, reikalingus formuluojant geomet-rinę algebrą. Apsiribosime tik būtiniausiomis multivektorių ir jų transformacijųsavybėmis, be kurių nepavyktų susidaryti bendro vaizdo. Skyriaus pabaigoje su-sitarsime dėl geometrinės algebros žymėjimų.
2.1. Vektoriai ir tiesinės erdvės
2.1.1. Vektoriai. Praeitame skyriuje trimatės erdvės vektorius rašėme pa-ryškintomis raidėmis. Nuo šiol abstrakčios daugiamatės erdvės vektorius žymė-sime mažosiomis lotyniškomis raidėmis, pavyzdžiui, a ar b. Kaip ir trimatėjeerdvėje juos įsivaizduosime orientuotomis atkarpomis, kurias nusako du dydžiai
a) b)
2.1 pav. a) Slankaus vektoriaus padėtis erd-vėje nėra fiksuota, todėl vektoriai a ir b lai-komi lygiais, a = b. b) Spindulys-vektoriusc vaizduojamas strėle, kurio pradžia O fik-suota erdvėje, o galas rodo erdvės tašką
— ilgis ir kryptis, kaip parodyta2.1 pav. Vektoriaus ilgį vadinsimenorma arba moduliu ir žymėsi-me |a|. Įvedę vienetinį vektorių a,kurį visada rašysime su stogeliu,vektorių a galime užrašyti kaipsandaugą a = |a|a. Vektoriauspadėtis erdvėje, apskritai kalbant,nėra apibrėžta. Jį galima stumdyti povisą erdvę, kaip parodyta 2.1a pav.,kur pradinis vektorius a ir pastumtas b(bet ne pasuktas) yra vienas kitam ly-
17

18 2 skyrius
a) b)
2.2 pav. Dviejų ir tri-jų vektorių sumos vaiz-davimas. Paveikslas a)iliustruoja vektorių sumoskomutatyvumą, a+b = b+a, o paveikslas b) — vek-torių sumos asociatyvumą,(a+b)+c = a+(b+c) =a + b+ c
gūs, a = b. Kitaip tariant, a ir b yra tas pats vektorius. Todėl įsivaizdavimas,kad vektorius jungia du erdvės taškus, nėra tikslus. Aprašytą vektorių vadinsimeslankiuoju arba krypties vektoriumi (angl. direction vector). Dėl šių savybių kaikada patogu visų vektorių pradžias patalpinti viename taške, pavyzdžiui, koordi-načių pradžioje, kaip tai darėm pirmame skyriuje (1.5 pav.), arba vieno vektoriausgalą prijungti prie kito vektoriaus pradžios, kaip buvo parodyta 1.1 paveiksle.
Taškas — tai konkreti, neturinti dydžio vieta erdvėje. Ji ir yra vienintelėtaško charakteristika. Taško A vietą erdvėje irgi patogu pavaizduoti vektoriumi,kurio vienas galas prasideda koordinačių pražioje O, kaip parodyta 2.1b paveiks-le. Toks vektorius vaizduoja taško A padėtį koordinačių pradžios atžvilgiu, to-dėl vadinamas taško spinduliu-vektoriumi (angl. point vector). Skirtingai nuoslankiojo vektoriaus spindulio-vektoriaus laisvai stumdyti negalima, nes jis vaiz-duoja erdvės tašką. Spindulius-vektorius mes jau naudojome praeitame skyriuje,1.6 pav., taškų P ir Q padėtį pavaizdavę vektoriais p ir q. Taigi, turime dvie-jų rūšių vektorius — slankųjį ir spindulį-vektorių. Toks vektoriaus dvejopumas,nors ir patogus skaičiavimuose, dažnai sukelia daug painiavos. Reiktų įsidėmė-ti, kad spindulį-vektorių (erdvės tašką) galime įvesti tik tada, kai užduotas kitastaškas (koordinačių pradžia). Kai kalbame apie vektorines erdves ir matemati-nius veiksmus jose, kaip taisyklė, galvoje turime slankiuosius vektorius. Dabartrumpai aptarsime svarbiausias tiesinių vektorinių erdvių savybes.
2.1.2. Tiesinės erdvės aksiomos. Vektoriai yra tiesinės erdvės V objektai.Tiesinę erdvę apibrėžia žemiau išvardytos aksiomos. Kiekvienai erdvės V vek-torių a ir b porai, a, b ∈ V , toje pačioje erdvėje galima priskirti kitą (ir vienintelį)vektorių a + b, kurį vadinsime vektorių suma. Panašiai kiekvieną vektorių a irrealųjį skaičių λ ∈ R atitinka kitas vektorius λa ∈ V , kurį vadinsime vekto-riaus a kartotiniu. Erdvė V vadinama tiesine, jei ji bet kokiems a, b, c ∈ V ir

Svarbiausios geometrinės algebros sąvokos ir aksiomos 19
2.3 pav. a) Vektoriaus a irskaliaro λ sandauga yra vek-torius λa, kurio ilgis λ kar-tų didesnis, o kryptis ta pati.b) Dviejų vektorių suma a+b ir skirtumas a−b = a+λb,kur λ = −1 yra R erdvėselementas, λ ∈ R
a) b)
λ, µ ∈ R tenkina tokias aksiomas:
a+ b = a+ b sumos komutatyvumas,
(a+ b) + c = a+ (b+ c) sumos asociatyvumas,
a+ 0 = a nulinio vektoriaus egzistavimas,
a+ (−a) = 0 atvirkštinio vektoriaus, egzistavimas.
(2.1)
Vektoriaus sandauga iš skaičiaus λ (jį vadinsime skaliaru), kuri geometriškai su-prantama kaip vektoriaus pailginimas λ kartų, tenkina aksiomas
λ(a+ b) = λa+ λb sandaugos distributyvumas vektorių sumai,
(λ+ µ)a = λa+ µa sandaugos distributyvumas skaliarų sumai,
(λµ)a = λ(µa) asociatyvumas,
1a = a daugyba iš vieneto.
(2.2)
Jei skaliaras lygus nuliui, µ = 0, manome, kad sandauga yra (0)a = ~0, nepri-klausomai nuo vektoriaus a krypties. Nulinį vektorių ~0, kaip tai priimta, mesžymėsime kaip ir skaliarinį nulį 0. 2.2 ir 2.3 paveikslai iliustruoja kai kurių išpaminėtų aksiomų geometrinę prasmę. Postulatus (2.1) ir (2.2) tenkinanti tiesinėerdvė dažnai vadinama tiesiog vektorine erdve V . Vektorinė erdvė geometrinėjealgebroje užima išskirtinę vietą, nes visi kiti geometriniai objektai — orientuotiplotai, tūriai ir pan. — konstruojami dauginant vektorius. Norėdami tai pabrėžtitokią erdvę vadinsime bazine vektorine erdve.
Erdvė V gali turėti poerdviusU ⊂ V . PoerdvioU vektoriai tenkina visas taspačias tiesinės erdvės aksiomas, tik negali „pabėgti“ iš poerdvio:
(a+ b) ∈ U, jei a, b ∈ U ,
λa ∈ U, jei λ ∈ R ir a ∈ U.(2.3)
Pavyzdžiui, visi plokštumoje esantys vektoriai sudaro trimatės erdvės poerdvį.

20 2 skyrius
Ar gautume tiesinę erdvę, jei aksiomose (2.1) ir (2.2) visus vektorius pakeis-tume bivektoriais arba trivektoriais? Žinoma, taip. Nes tiesinėje erdvėje apibrėž-tos tik dvi operacijos — tos pačios rūšies objektų suma ir jų daugyba iš skaičiaus.Jos negali vienos rūšies elementų paversti kitais, todėl kaip tuos objektus vadi-name — vektoriais, bivektoriais ar trivektoriais — nėra svarbu.
2.1.3. Geometrinė algebra. Tiesinių erdvių operacijų — sudėties ir daugy-bos iš skaičiaus — daugeliui praktinių taikymų nepakanka. Reikalinga dar vienaoperacija. Ji vadinama elementų daugyba, o tiesinė erdvė, kurios elementus gali-ma sudėti ir dauginti, — algebra. Erdvės elementų daugybos operacijos nereikėtųpainioti su daugyba iš skaičių, kurie patys dažniausiai nėra tiesinės erdvės ele-mentai. Skaičiai sudaro kitą, nors ir labai panašią algebrinę struktūrą — lauką.Tačiau geometrinės algebros atveju skaliarai (skaičiai) priklauso tiesinei erdvei,bet tai greičiau išimtis, o ne bendra taisyklė.
Mūsų tikslas yra sukonstruoti asociatyvią algebrą.Tai darydami laikysimėstradicinio kelio ir erdvės elementų daugybos operaciją įvesime tiesinės erdvėsstruktūroje, kurioje jau apibrėžta elementų suma ir jų daugyba iš skaičiaus. Šiuoatveju mums tereikia sugalvoti daugybos operaciją, kuri leistų taip sudaugintierdvės elementus, kad gautasis naujas elementas vėl priklausytų tiesinei erdvei.Kadangi dauginant du vektorius naujo vektoriaus sukonstruoti nemokame1, gali-me pamėginti išplėsti tiesinę erdvę sujungiant skirtingas tiesines erdves, vektoriųerdvę, bivektorių erdvę ir t. t. į vieną uždarą erdvę. Tuomet sandauga galėtų išvienos rūšies elementų pagaminti kitos rūšies elementus, pavyzdžiui, iš dviejųvektorių padaryti bivektorių. Tokiu būdu problema būtų išspręsta, nes bivekto-rių erdvė jau priklausytų mūsų išplėstai tiesinei erdvei. Žinoma, tai reiškia, kadanksčiau buvusios nepriklausomos tiesinės erdvės pradės tarpusavyje vienaip arkitaip maišytis. Kaip šios erdvės tarpusavyje persipins ir kiek vektorinę erdvęturėsime išplėsti, kad ji taptų uždara, ir nulems naujoji daugybos operacija.
Paprasčiausia daugybos operacija, leidžianti tokiu būdu sukonstruoti algeb-rą — tiesinę erdvę su dviem operacijomis, sudėtimi ir daugyba, — yra išorinėdaugyba, kurią žymi pleišto simbolis ∧. Ji tenkina aksiomas
(λa) ∧ b = λ(a∧ b) asociatyvumas skaliaro atžvilgiu,
(a∧ b) ∧ c = a ∧ (b ∧ c) asociatyvumas vektoriaus atžvilgiu,
λ(a∧ b) = (a ∧ b)λ komutatyvumas skaliaro atžvilgiu,
a ∧ b = −b ∧ a antikomutatyvumas vektoriaus atžvilgiu,
(a+ b) ∧ c = a ∧ c+ b ∧ c distributyvumas.
(2.4)
1Vektorinė dviejų vektorių daugyba nėra asociatyvi, todėl asociatyvios algebros su ja negau-tume. Tai dar viena priežastis, kodėl geometrinėje algebroje vektorinė daugyba nenaudojama.

Svarbiausios geometrinės algebros sąvokos ir aksiomos 21
2.4 pav. Formulės (λa) ∧ b = λ(a ∧ b)abiejų pusių geometrinė interpretacija, kaiλ = 4
Tai išorinių formų algebra, kuriąįvedė Grassmannas (H. G. Grass-mann 1803–1874). Ji dar vadi-nama ir diferencialinių formų arbatiesiog Grassmanno algebra. Ka-dangi skaliarai mūsų naujai su-konstruotoje tiesinėje erdvėje da-bar tapo pilnateisiais elementais,daugybą iš skaičiaus ir iš erdvėselemento, griežtai kalbant, turimežymėti tuo pačiu simboliu ∧. Pavyzdžiui, bivektoriams (λa) ∧ b = λ(a ∧ b)pirmąją aksiomą reiktų rašyti taip: (λ∧ a)∧ b = λ∧ (a∧ b). Tačiau skaliaramspadarysime išimtį ir išorinės daugybos ženklo simbolį pakeisime tarpeliu, t. y.rašysime (λa)∧b ir λ(a∧b). Kaip reiktų suprasti, pavyzdžiui, aukščiau užrašytąasociatyvumo skaliaro atžvilgiu taisyklę? Aiškiausiai ją paaiškina 2.4 piešinys,atskleidžiantis išorinės daugybos iš skaliaro geometrinę prasmę. Matome, kadkairėje pusėje esanti išorinė daugyba iš skaičiausλ∧a, kaip ir anksčiau nagrinėtadaugyba iš skaičiaus tiesinėje erdvėje, pirmiausia pailgina vektorių λ kartų, otada jį išoriškai padaugina iš kito vektoriaus, taip pagamindama bivektorių. Tuotarpu dešinėje pusėje matome jau λ kartų padidintą bivektorių (dviejų vektoriųsandaugą). Taigi, asociatyvumo skaliaro atžvilgiu savybė sako, kad nesvarbu,kokia tvarka dauginame iš skaliaro, abiejose pusėse esantys bivektoriai yra lygūs.Todėl bivektoriaus ploto forma nėra svarbi. Svarbus tik bivektoriaus a ∧ b dydisir jo kryptis — padėtis erdvėje ir vidinė orientacija, t. y. prieš ar pagal laikrodžiorodyklę kampu 0 < θ < π judame nuo pirmojo daugiklio a link antrojo b. Taitaip pat reiškia, kad išorinė daugyba iš skaliaro niekuo nesiskiria nuo daugybosiš skaliaro tiesinėje bivektorių erdvėje.
Tuo tarpu bivektorių a ∧ b padauginę išoriškai iš vektoriaus c jau gaunameobjektą a ∧ b ∧ c, kuris pagal tiesinių erdvių suskirstymą yra kitoje (trivektorių)erdvėje. Tokiu būdu, išorinė daugyba iš vektoriaus ima maišyti ankstesnes vek-torines erdves. Tiksliau, šiuo atveju ji mus perkelia į vienetu didesnės dimensijostiesinę erdvę. Dabar tai jau nėra blogai, nes visų šių tiesinių erdvių visumą jausuprantame kaip vieną didelę tiesinę erdvę. Jei pirminė erdvė yra sudaryta iš ntiesiškai nepriklausomų vektorių, tai sudarydami įvairias dvigubas, trigubas irt. t. išorines sandaugas sugeneruosime tiesines bivektorių, trivekorių ir t. t. tiesi-nes erdves. Visų šių erdvių visuma (išorinės daugybos atveju jų tiesioginė suma)irgi yra tiesinė erdvė. Pavyzdžiui, plokštumoje turime tik du nepriklausomusvek-torius, iš kurių galime sudaryti tik vieną tiesiškai nepriklausomą bivektorių. Jeipapildomai įskaitysim skaliarą, tada dviejų tiesiškai nepriklausomų vektorių su-

22 2 skyrius
generuota erdvė turės 22 = 4 bazinius elementus (skaliarą, du bazinius vektoriusir bivektorių). Pabrėžiant, kad šioje išplėstoje tiesinėje erdvėje bus naudojama iš-orinė elementų sandaugos operacija, ji vadinama Grassmanno erdve. Pradėję nuotrimatės erdvės vektorių a, b ir c galime sudaryti tris nepriklausomus bivektorius,a ∧ b, b ∧ c ir c ∧ a, ir vieną trivektorių a ∧ b ∧ c. Taigi, šiuo atveju Grassmanoerdvės bazę sudaro 23 = 8 baziniai elementai — skaliaras, 3 vektoriai, 3 bivek-toriai ir trivektorius, kurį dar vadinsime trimatės erdvės pseudoskaliaru. Galimanesunkiai parodyti, kad n tiesiškai nepriklausomų vektorių n-matėje erdvėje su-generuoja 2n bazinių Grassmano erdvės elementų.
Iš to, kas pasakyta, išplaukia, kad kiekviena išorinė daugyba iš vektoriausperkelia elementą į vis didesnės dimensijos erdvę. Ar galima būtų panašiu princi-pu sukonstruoti algebrą, naudojant vidinę sandaugą? Deja, asociatyvios algebrostaip pagaminti neįmanoma dėl paprastos priežasties: skirtingai nuo išorinės san-daugos vidinė sandauga nėra asociatyvi operacija, t. y. (A· b) ·c 6= A· (b ·c), kurA žymi bivektorių. Todėl būtų neįmanoma išpildyti vieno iš svarbiausių, būtent,algebros asociatyvumo, reikalavimo.
Tačiau sujungti vektorių, bivektorių, trivektorių ir t. t. erdves į vieną didesnėsdimensijos tiesinę erdvę galima įvedus kitą asociatyvią operaciją — geometrinęsandaugą, kurioje pasislėpusios abi — tiek vidinė, tiek ir išorinė — sandaugos.Pirmasis tai sugalvojo W. K. Cliffordas (William Kingdon Clifford, 1845–1879),tačiau tuo metu jo skaičiavimas neprigijo. Nuo tiesinių erdvių elementų sandau-gos apibrėžimo priklauso, kaip visos šios tiesinės erdvės bus susijusios viena sukita, o tuo pačiu ir būsimos algebros struktūra. Pavyzdžiui, jei elementų geomet-rinė sandauga tenkina žemiau išvardytas savybes
(λa)b = λ(ab) asociatyvumas skaliaro atžvilgiu,
(ab)c = a(bc) asociatyvumas vektoriaus atžvilgiu,
λa = aλ komutatyvumas skaliaro atžvilgiu,
(a+ b)c = ac+ bc distributyvumas,
(2.5)
gauname kitą asociatyvią algebrą. Čia ir toliau daugybos ženklas (tarpelis) jauvisur suprantamas kaip geometrinė sandauga. Tiesinė erdvė, kurioje elementaidauginami pagal (2.5) taisykles, vadinama Cliffordo erdve. Nors dauginant ele-mentus atskiri Cliffordo erdvės poerdviai (vektorių, bivektorių, trivektorių ir t. t.),persipina sudėtingiau negu Grassmano erdvėje, elementų klasifikavimas pagalrangus joje išlieka, todėl bet koks elementas gali būti vienareikšmiškai išskai-dytas į skirtingų rangų elementų sumą. Bendrumo dėlei pridursime, kad visusvektorius (2.5) aksiomose galima pakeisti bet kokiais multivektoriais A,B ir C.

Svarbiausios geometrinės algebros sąvokos ir aksiomos 23
Iš pirmo skyriaus žinome, kad Cliffordo algebros geometrinės interpretacijoskertinis akmuo yra (1.1b) formulė, leidžianti dviejų vektorių geometrinę sandau-gą išskaidyti į vidinę ir išorinę sandaugas. Todėl fizikai, kitaip nei matematikai,ją ir vadina geometrine, o ne Cliffordo algebra. Ar galima taip išskaidyti skaliaroir vektoriaus geometrinę sandaugą λa = λ ·a+λ∧a? Ir kaip abi šias sandaugasturėtume suprasti? Išsamiai šį klausimą nagrinėsime tik 12 skyriuje. O tuo tarpuaptarkime vektoriaus c ir bivektoriaus B = a ∧ b sandaugą, kurią apibendrinęsuprasime ir daugybos iš skaliaro taisyklę.
Pradėkime nuo jų išorinės sandaugos. Iš išorinės sandaugos (2.4) asociaty-vumo bei antikomutatyvumo savybių turime:
c ∧ B = c ∧ (a ∧ b) = c ∧ a ∧ b = (−1)a ∧ c ∧ b = (−1)2a ∧ b ∧ c= (−1)2(a ∧ b) ∧ c = (−1)2B ∧ c = B ∧ c, (2.6a)
B ∧ c = (a ∧ b) ∧ c = a ∧ b ∧ c = (−1)a ∧ c ∧ b = (−1)2c ∧ a ∧ b= (−1)2c ∧ (a ∧ b) = (−1)2c ∧ B = c ∧ B. (2.6b)
Kaip matome, skirtingai negu vektoriams (1.6), vektoriaus ir bivektoriaus išorinėsandauga yra simetrinė: c ∧ B = B ∧ c. Lengva matyti, kad vietoje bivektoriauspaėmus bet kokio lyginio rango multivektorių, jo išorinė sandauga su vektoriu-mi irgi bus simetrinė, nes išorinėje sandaugoje vektorių su multivektoriumi tekssukeisti vietomis lyginį skaičių kartų. Jei multivektoriaus rangas nelyginis, joišorinė sandauga su vektoriumi dėl tos pačios priežasties bus antisimetrinė. Pa-stebėjimą patvirtina jau žinoma dviejų vektorių išorinė sandauga c∧ b = −b∧ c.Jei norime, kad kaip ir vektoriams geometrinė bivektoriaus ir vektoriaus san-dauga Bc išsiskaidytų į simetrinę ir antisimetrinę dalis, turime pareikalauti, kadvektoriaus ir bivektoriaus vidinė sandauga būtų priešingos simetrijos. Kitaip ta-riant, vektoriaus ir bivektoriaus vidinė sandauga turėtų būti antisimetrinė, o nesimetrinė kaip vektoriams:
B · c = −c · B, (2.7a)
c · B = −B · c. (2.7b)
Kai šis simetrijos reikalavimas tenkinamas, geometrinė vektoriaus ir bivektoriaussandauga visada išsiskaido į priešingos simetrijos narių sumą:
cB = c · B + c ∧ B, (2.8a)
Bc = B · c+ B ∧ c , (2.8b)

24 2 skyrius
todėlc · B = 1
2
ÄcB − (−1)2Bc
ä, (2.9a)
B · c = 12
ÄBc− (−1)2cB
ä. (2.9b)
Formulėje tyčia įterpėme daugiklį (−1)2, rodantį, kad ženklas priklauso tik nuomultivektoriaus rango. Analogiškai samprotaujant galima įsitikinti, kad formulės(2.6)–(2.9) išlieka teisingos, jei vietoje bivektoriaus B stovės bet kokio rango rhomogeninis multivektorius Br = a1 ∧ a2 ∧ · · · ∧ ar, tik tada vietoje daugik-lio (−1)2 turėtume visur rašyti (−1)r. Tuo įsitikinsime 12 skyriuje. Formulės(2.6)–(2.9) tinka ir skaliarui. Kadangi šio rangas yra nulis, tai iš (2.7) išeitų, kadλ · a = −a · λ. Tačiau iš aksiomų (2.5) žinome, kad skaliaras komutuoja suvisais algebros elementais, todėl nenorėdami gauti prieštaravimo vidinę skalia-ro ir vektoriaus (bendru atveju multivektoriaus) sandaugą turime laikyti nuliu:λ · a = a · λ = 0. Tada iš (2.8) formulės išplaukia, kad λa = λ ∧ a = a ∧ λ,t. y. skaliaro ir multivektoriaus geometrinė sandauga sutampa su išorine san-dauga. Šios taisyklės turime laikytis ir iš skaliaro daugindami bet kokio rangomultivektorių Br · λ = λ · Br = 0.
Geometrinė ir prieš ją nagrinėta išorinių formų algebra, kurioje apibrėžtatik išorinė daugyba, turi labai daug bendra. Pavyzdžiui, žinodami geometrinęelementų sandaugą galime vienareikšmiškai surasti ir jų išorinę sandaugą. Abialgebros taip pat leidžia vienareikšmiškai suskaidyti multivektorius į juos suda-rančių rangų elementus. Tačiau yra ir skirtumų. Pats svarbiausias iš jų tas, kadgeometrinė sandauga išlaikovektorių sandaugos dydį (normą), t. y. |a b| = |a||b|,tuo tarpu išorinė sandauga (Grassmano algebra) — ne: |a ∧ b| ≤ |a||b|. Tai la-bai svarbu, nes pirmuoju atveju „informacija“ nėra prarandama, todėl geometri-nė algebra leidžia realizuoti daugiau naudingų operacijų, pavyzdžiui, pasukti aratspindėti multivektorius. Kita vertus, formuluojant gamtos dėsnius ne mažiausvarbi ir galimybė vienu metu dirbti su keliomis skirtingų rangų tiesinėmis erdvė-mis. Pavyzdžiui, spindulio-vektoriaus ir greičio vektoriaus išorinė sandauga (pa-dauginta iš dalelės masės) yra bivektorius. Fizikoje jis vadinamas judesio kiekiomomentu. Du greičius sudedame vektorinėje erdvėje, tuo tarpu judesio kiekiomomentus sudedame bivektorinėje erdvėje. Dar vienas pavyzdys. Kaip vėliaumatysime, elektrono sukinys yra skaliaro ir bivektoriaus suma. Todėl, norėdamiaprašyti sukinio dinamiką, turime vienu metu dirbti dviejose tiesinėse erdvėse.Tokiam darbui idealiai tinka geometrinė algebra. Klasikinis elektromagnetinislaukas taip pat matematiškai aprašomas kaip skirtingo rango elementų — elekt-rinio ir magnetinio — laukų suma.
Taigi, turėdami vidinę ir išorinę (apibendrintai — geometrinę) sandaugas ga-lime tarpusavyje susieti anksčiau buvusias visiškai nepriklausomas tiesines vek-

Svarbiausios geometrinės algebros sąvokos ir aksiomos 25
torių, bivektorių, trivektorių ir t. t. erdves. Geometrinės algebros formulės ir dar-bas su jomis gerokai supaprastėja, jei iš vektorių galima sudaryti ortonormuotąbazę. Šioje knygojedaugiausiadirbsime būtent su tokia baze, todėl dabar trumpaiją ir aptarkime.
2.1.4. Vektorių tiesinė nepriklausomybė. Bazė. Sakoma, kad vektorinėserdvės vektorius b ∈ V yra tiesinė vektoriųa1, a2, . . . , an kombinacija, jei galimasurasti tokius skaičius λi, kad būtų patenkinta lygybė
b = λ1a1 + λ2a2 + · · ·+ λnan, kur λ1, λ2, . . . , λn ∈ R. (2.10)
Pavyzdžiui, kiekvieną plokštumos vektorių b, kaip matome iš 2.2a pav., visadagalime išskaidyti į du vektorius (žr. 1.3 pavyzdį):
b = λ1a1 + λ2a2 . (2.11)
Trimatėje 3D erdvėje tam prireiktų trijų vektorių a1, a2 ir a3. Sakoma, kad tie-sinės erdvės vektoriai a1, a2, . . . , an yra tiesiškai vienas nuo kito nepriklausomi,jei lygtį
λ1a1 + λ2a2 + · · ·+ λnan = 0 (2.12)
galima patenkinti tik tada kai λ1 = λ2 = · · · = λn = 0. Tokiu atveju vek-torių rinkinį a1, a2, . . . , an vadiname baze, o pačius vektorius — baziniais.Skleidinio (2.10) skaičiai λi vadinami vektoriaus b koordinatėmis. Jei bet kurįn-matės erdvės V vektorių galime užrašyti (2.10) pavidalu, sakoma, kad vekto-rių rinkinys λ1a1, λ2a2, . . . , λnan perkloja (angl. spans) visą tiesinę erdvę V .Pavyzdžiui, plokštumai perkloti pakanka rinkinio λ1a1, λ2a2, kuris tenkina(2.12) sąlygą. Bazinių vektorių pasirinkimas nėra vienareikšmis. Tačiau patsbazinių vektorių skaičius n priklauso tik nuo vektorinės erdvės V savybių. Tei-singas ir atvirkščias teiginys: nurodydami bazinių vektorių skaičių n, tuo pačiuužduodame ir erdvės V dydį. Taigi, keičiant vektorių koordinatesλi visą erdvę Vgalima perkloti paėmus tiesiškai nepriklausomų vektorių aibę a1, a2, . . . , an,kuri sudaro tos erdvės bazę. Pavyzdžiui, dvimatės ir trimatės erdvės atveju, pa-renkant skaliarus λi, visą erdvę perkloja atitinkamai vektoriai b = λ1a1 + λ2a2ir b = λ1a1 + λ2a2 + λ3a3.
Samprotavimus apie vektorių tiesinę nepriklausomybę ir bazę galima parai-džiui perkelti bivektoriams. Pavyzdžiui, trimatėje erdvėje iš trijų tiesiškai ne-priklausomų vektorių a, b ir c galime sukonstruoti tris tiesiškai nepriklausomusbivektorius B1 = a ∧ b, B2 = b ∧ c ir B3 = c ∧ a. Naudojant šiuos bivektoriusir parenkant atitinkamas skaliarų λi vertes bet kurį kitą bivektorių (plokštumą)trimatėje erdvėje galima užrašyti kaip tiesinę kombinaciją:
B = λ1a ∧ b+ λ2b ∧ c+ λ3c ∧ a = λ1B1 + λ2B2 + λ3B3. (2.13)

26 2 skyrius
Taigi, bivektorių rinkinį B1,B2,B3 galima laikyti tiesinės bivektorinės erdvėsbaze. Trimatėje erdvėje yra tik vienas nepriklausomas trivektorius a∧b∧c, kurisir sudaro trivektorinės erdvės bazę. Baziniai vektoriai, bivektoriai, trivektoriaiir t. t., prie kurių dar reiktų pridėti skaliarus (jų baziniu elementu galime laikytivienetą 1), vadinami baziniais geometrinės algebros elementais. Kaip minėjome,jų bendras skaičius visus rangus sujungiančioje tiesinėje erdvėje yra 2n. Kaipir paprastame vektoriniame skaičiavime konkrečių uždavinių sprendimas labaisupaprastėja pasirinkus ortonormuotą bazę.
2.2. Multivektorių sudėtis
Žinant bazinius vektorius toje bazėje galima išskleisti bet kurį multivektorių.Pavyzdžiui, dvimatėje (n = 2) Cliffordo algebroje multivektoriai A,B visadaužrašomi tokios formos sumomis:
A = a0 + a1e1 + a2e2 + a3e12, B = b0 + b1e1 + b2e2 + b3e12 , (2.14)
tik su skirtingais skaitiniais koeficientais. Simboliu e12 čia pažymėjome bivekto-rių e1 ∧e2. Multivektorių sumavimas bet kokioje geometrinėje algebroje reiškiakoeficientų prie tų pačių bazinių elementų sudėtį,
A+ B = (a0 + b0) + (a1 + b1)e1 + (a2 + b2)e2 + (a3 + b3)e12 . (2.15)
Multivektorių dauginant iš skaliaro, iš jo yra padauginami visi prie bazinių vek-torių stovintys koeficientai. Šios dvi savybės yra tiesinės erdvės postulatų (2.1)ir (2.2) taikymo rezultatas.
Dabar susipažinsime su svarbiausiais geometrinės algebros tiesiniais atvaiz-džiais, kurių mums prireiks tolesniems skaičiavimams.
2.3. Tiesinės funkcijos
Tiesinių lygčių sistemos sutinkamos visose srityse — fizikoje, ekonomikoje,kompiuterijoje ir pan. Tokios lygtys dažnai užrašomos matriciniu pavidalu, t. y.kaip matricos ir ieškomo vektoriaus-stulpelio sandauga. Sandaugos rezultatasyra kitas vektorius-stulpelis. Geometrinė algebra leidžia tokias lygčių sistemasužrašyti kaip tiesines multivektorių funkcijas ir jas išspręsti geometrinės algeb-ros metodais. Stulpelį sudarančius skaičius galim įsivaizduoti kaip vektoriauskoordinates, o daugybą iš matricos — kaip multivektorinę lygtį ar funkciją, kaipparodyta žemiau formulėje (2.19). Geometrinė algebra leidžia sukonstruoti tie-sines priklausomybes tarp multivektorių, net tokias, kurias kartais būna sunku arnet neįmanoma užrašyti matriciniu pavidalu. Multivektorinių tiesinių funkcijų

Svarbiausios geometrinės algebros sąvokos ir aksiomos 27
teorijos išsamiai nenagrinėsime. Tačiau glaustai susipažinsime su pradmenimis,kurių mums prireiks uždaviniams spręsti.
Paimkime dvi vektorines erdves V ir W ir apibrėžkime funkciją arba trans-formaciją F, kuri kiekvienam erdvės V elementui a, b ∈ V priskiria erdvės Welementus F(a), F(b) ∈ W . Sakoma, kad funkcija F, pervedanti vienos erdvėselementus į kitos tos pačios dimensijos erdvės elementusF : V →W , yra tiesinė,jei bet kokiems a, b ∈ V ir λ ∈ R yra tenkinamos lygybės
F(a+ b) = F(a) + F(b),
F(λa) = λF(a).(2.16)
Tokia tiesinė vektorių funkcija yra matricos ir stulpelio sandaugos analogas. Ištiesų, jei užduosime bazę, vektorių a galėsime išskleisti koordinatėmis
a = a1e1 + a2e2 + · · ·+ anen . (2.17)
Tada a galima įsivaizduoti kaip stulpelį, sudarytą iš ai verčių. Tiesinė funkcijaF(a) duoda naują elementą c = F(a), kurį taip pat galima išskleisti baziniaiselementais panašiai kaip (2.17), c = c1e1 + c2e2 + · · ·+ cnen. Todėl ryšį tarpskleidinių koeficientų ci ir aj galima užrašyti matriciniu pavidalu
ci =n∑
j=1
Fijaj , (2.18)
kur Fij yra funkcijos F matriciniai elementai. Iš čia išplaukia, kad tiesinė funk-cija yra matricos, jungiančios du multivektorius, analogas. Skirtumas tas, kadfunkcija F(a) yra užrašyta bekoordinatiniu pavidalu, tuo tarpu matrica visada su-sijusi su konkrečia baze. Štai keletas tiesinių funkcijų pavyzdžių, kuriuoseλ žymiskaliarą, o a ir b — pastovius vektorius, nusakančius transformaciją x → F(x)plokštumoje:
F(x) = λx = λx1e1 + λx2e2,
F(x) = (a ∧ x) · b = (a1x2 − a2x1)(b2e1 − b1e2),
F(x) = axa = (a21x1 − a22x1 + 2a1a2x2)e1
+ (a22x2 − a21x2 + 2a1a2x1)e2.
(2.19)
Iš formulių matome, kad geometrinėje algebroje transformacijos užrašomos la-bai kompaktiškai. Dešinėje formulių pusėje užrašytas pilnas koordinatinis trans-formacijos pavidalas Cl2,0 algebroje. Bendru atveju tiesinė funkcija nebūtinaitransformuoja vektorių x į tą pačią, t. y. vektorinę, erdvę. Pavyzdžiui, funkcijaF(x) = a ∧ x transformuoja iš vektorinės į bivektorinę erdvę. Kadangi erdvių

28 2 skyrius
dimensijos, apskritai kalbant, yra nevienodos, matriciniame atvaizdavime tokiostransformacijos matrica bus stačiakampė, o ne kvadratinė.
Jei turime dvi funkcijas F : V → W ir G : W → X , tada jų kompozicija,kurią žymėsime G F, duos G F : V → X . Suprantama, kad dviejų tiesiniųfunkcijų kompozicija taip pat yra tiesinė funkcija. Koordinatinis kompozicijosanalogas yra matricų sandauga.
Toliau aptarsime keletą svarbių tiesinių transformacijų, vadinamų geometri-nės algebros involiucijomis. Priminsime, kad involiucija vadinama tokia tiesinėtransformacija, kurią pritaikius du kartus iš eilės gaunamas pradinis rezultatas.Formaliai involiucija užrašoma kaip kompozicija F F : Clp,q → Clp,q.
2.3.1. Geometrinės algebros involiucijos. Geometrinėse algebrose egzis-tuoja trys svarbios involiucijos: apgrąža (arba reversija, angl. reversion), rangoinversija (arba tiesiog inversija, angl. inversion) ir Cliffordo involiucija (angl.Clifford conjugation).
2.3.1.1. Apgrąža. Tai labai dažnai taikoma tiesinė transformacija. Ji žymi-ma tildės simboliu virš multivektoriaus2. Po apgrąžos geometrinėje (ir išorinėje)sandaugose vektoriai surašomi atvirkščia tvarka. Pavyzdžiui,
abc = cba . (2.20)
Paprasčiausiuose geometrinės algebros elementuose, skaliare ir vektoriuje, nėrako apgręžti, todėl paveikti apgražos operacija jie nepasikeičia t. y. a = a. Tačiauveikdama į aukštesnio rango elementus apgrąža gali pakeisti jų ženklą. Pavyz-džiui, apgręžę Cl3,0 algebros trivektorių gauname
e123 = ·e1e2e3 = e3e2e1 = e321 = −e123. (2.21)
Bendru atveju baziniais elementais išskleistas r-tojo rango multivektoriusM turir skirtingų indeksų. Tokį apibrėžto rango multivektorių vadinsime homogeniniumultivektoriumi ir žymėsime simboliu 〈M〉r. Kampinius skliaustus interpretuo-sime kaip filtrą arba projekcinį operatorių — rango projektorių — kuris iš visųmultivektoriaus rangų palieka tik tą jo dalį, kurios rangas lygus r. Po apgražosr-tojo rango multivektorius ženklą nusako formulė
fi〈M〉r = (−1)r(r−1)
2 〈M〉r , APGRĄŽA (2.22)
nes norint r indeksų išrikuoti priešinga tvarka, tenka atlikti r(r− 1)/2 perstaty-
mų. Vektoriaus atveju r = 1, todėl fi〈M〉1 = 〈M〉1. Bivektoriui r = 2, vadinasi
2Kai kurie autoriai vietoj tildės ženklo naudoja durklo † simbolį.

Svarbiausios geometrinės algebros sąvokos ir aksiomos 29
Involiucija 〈A〉0 〈A〉1 〈A〉2 〈A〉3 〈A〉4 〈A〉5 〈A〉6 〈A〉7˜ + + − − + + − −ı + − + − + − + −ı + − − + + − − +
2.1 lentelė. 〈A〉r ženklas po apgrąžos (‹), inversijos (Ù ) ir Cliffordo involiu-cijos (‹Ù)
fi〈M〉2 = −〈M〉2. Kaip ir visos tiesinės operacijos, apgrąža veikia į atskirus mul-tivektoriaus rangus nepriklausomai, todėl rezultatas yra apgręžtų narių suma
‹M =fi〈M〉0 +fi〈M〉1 +fi〈M〉2 + · · · (2.23)
2.3.1.2. Rango inversija. Inversiją žymėsime lankeliu virš multivektoriaus.Ši involiucija keičia visų bazinių vektorių ženklus į priešingus, ej → −ej , todėl,pavyzdžiui, paveikę ja Cl3,0 algebros trivektorių gauname
Ûe123 = e1e2e3 = (−e1)(−e2)(−e3) = −e123. (2.24)
Homogeniniams r rango multivektoriams jos veikimas duoda
〈M〉r = (−1)r〈M〉r . INVERSIJA (2.25)
Kaip žinome, trimatėje erdvėje po koordinačių inversijos x → −x, y → −yir z → −z kairinė koordinačių sistema pavirsta dešinine, ir atvirkščiai. Rangoinversija (2.25) yra šios inversijos apibendrinimas daugiamatėms erdvėms.
2.3.1.3. Cliffordo involiucija. Tai kombinuota involiucija, kai apgrąža ir in-versija veikia vienu metu. Pavyzdžiui,
Ûe123 = (−e3)(−e2)(−e1) = e123. (2.26)
Iš formulių (2.22) ir (2.25) išplaukia bendra involiucijos formulė
fi〈M〉r = (−1)r(1+r)
2 〈M〉r . CLIFFORDO INVOLIUCIJA (2.27)
Involiucijos tarpusavyje komutuoja, todėl rezultatas nepriklauso nuo to kuriatvarka jas atliekame. Jų savybes apibendrina 2.1 lentelė, kurioje pavaizduo-ta, kaip keičiasi r-jo rango multivektoriaus ženklas po apgrąžos, inversijos irCliffordo involiucijų. Kaip matome, visi ženklai atsikartoja kas ketvirtą rangą. Išvisų involiucijų praktikoje dažniausiai naudojama apgrąža. Fizikoje involiucijosleidžia aprašyti diskretines erdvėlaikio transformacijas, tokias kaip lygiškumas,laiko apgrąža ar krūvio sujungtinumas.

30 2 skyrius
2.1 pavyzdys.
‹ab =fi〈ab〉0 +fi〈ab〉2 = 〈ba〉0 + 〈ba〉2 = b · a+ b ∧ a = ba. (2.28)
2.2 pavyzdys. Ùab = 〈ab〉0 + 〈ab〉2 = 〈ab〉0 + 〈ab〉2 = ab, (2.29)
todėl‹Ùab = ba. (2.30)
2.3 pavyzdys.
(ab)(‹ab) = abba = |b|2a2 = |a|2|b|2. (2.31)
2.4 pavyzdys. Patikrinsim, kad išskaidę nehomogeninį multivektorių į rangus ir pa-veikę apgrąžos operacija kiekvieną rangą atskirai nenusižengiame bendram apibrėžimui
(2.20), t.y. rezultatas dera su formule ›abc = cba. Iš tiesų, kadangi
abc = 〈abc〉1 + 〈abc〉3 , (2.32)
tai, pasinaudoję 2.1 lentele, rašom
›abc = 〈abc〉1 − 〈abc〉3 . (2.33)
Vektorius 〈abc〉1 susideda iš sumos, kurios dėmenys skaliarų aibjck ir kokio nors baziniovektoriaus el sandaugos. Vektorius nepasikeis, jei geometrinėje sandaugoje sukeisimdaugiklių tvarką, todėl galim rašyti 〈abc〉1 = 〈cba〉1. Kita vertus, keičiant daugikliųtvarką trivektoriuje keičiasi jo ženklas. Daugiklius perrašius priešinga tvarka jis pasikeisį priešingą, 〈cba〉3 = −〈abc〉3. Tai matyti iš (2.21) formulės. Iš čia išplaukia, kad
›abc = 〈cba〉1 + 〈cba〉3 = cba. (2.34)
Skaičių algebros
Egzistuoja tik keturios algebros su dalyba, t. y. tokios, kuriose kiekvienamnenuliniam elementui visada egzistuoja atvirkštinis elementas. Tai realiųjų R
skaičių, kompleksinių C skaičių, kvaternionų H ir oktonionų O algebros. Surealiaisiais skaičiais susiduriame visi ir kasdien. Kompleksiniai skaičiai reika-lingi tiksliuosiuose moksluose. Tiek R skaičių, tiek ir C skaičių algebros yrakomutatyvios. Kvaternionų H algebra yra pirmoji nekomutatyvi algebra. Fizi-kos taikymams svarbiausia yra kvaternionų vektorinė dalis. Pastarąją apibrėžuskaip dviejų vektorių vektorinę sandaugą (aksialinį vektorių), atsirado vektorinisskaičiavimas. Įdomu tai, kad grynieji matematikai vektorinį skaičiavimą laikėmatematiniu monstru ir niekada jo nepripažino. Oktonionai O netenkina ne tikkomutatyvumo, bet ir asociatyvumo savybės, todėl skirtinga tvarka sudauginętris oktonionus a, b ir c gauname, kad (ab)c 6= a(bc). Dėl šios priežasties O
algebra retai kada taikoma. Nors geometrinės algebros multivektoriai kai kadair pavadinami Cliffordo skaičiais, tačiau ne visi nenuliniai multivektoriai turiatvirkštinius. Todėl Cliffordo skaičiai griežtai kalbant nėra skaičiai.

Svarbiausios geometrinės algebros sąvokos ir aksiomos 31
2.4. Žymėjimai ir terminai
Literatūroje kol kas geometrinės algebros objektų žymėjimas nėra galutinainusistovėjęs, todėl susitarsim, kaip toliau žymėti įvairius objektus (žr. 357 psl.).
Multivektoriai. Senajame vektoriniame skaičiavime vektoriai žymimi ryš-kiais spaudmenimis arba su strėlyte virš raidės, pavyzdžiui, a arba~a. Mokslinėjeliteratūroje, kai kalbama apie geometrinę algebrą, vektorius įprasta rašyti papras-ta raide. Toliau knygoje dažnai taip ir darysime, ypač kai vektorius aptarinėsimeabstrakčiame kontekste. Tokius vektorius žymėsime tiesiog a, b, c, . . . Tačiau fi-zikiniuose taikymuose, arba kai norėsime pabrėžti, kad turime reikalų su 2D ar3D erdvės vektoriais, juos išskirsime juodu šriftu a, b, c, . . . Pavyzdžiui, jei spe-cialiosios reliatyvumo teorijos vektorius žymėsime paprastu šriftu, tai tame pa-čiame kontekste aptariamus trimatės erdvės vektorius pajuodinsime. Skaliaruskaip ir iki šiol stengsimės žymėti graikiškomis raidėmis α, β, γ, . . . Tačiau fizi-kiniuose taikymuose juos žymėsime ir fizikoje įprastomis lotyniškomis raidėmis(pavyzdžiui, laiką raide t, o masę raide m). Bivektorius sutiksime labai dažnai.Kad būtų lengviau susigaudyti, juos žymėsime rašytinėmis raidėmis A,B, C irt. t. Abstraktų multivektorių, sudarytą iš skaliaro, vektoriaus ir bivektoriaus, ra-šysime, pavyzdžiui, taip: M = α+ a+A. Bazinius vektorius visada žymėsimepajuodinta raide e su vienu indeksu ei, ei, o jų geometrinę sandaugą — ta pačiaraide su daugeliu indeksųeiejek · · · ≡ eijk,... Aukštesnio rango, o taip pat neho-mogeninius multivektorius (išskyrus pseudoskaliarą, kurį dėl jo svarbos visadažymėsime didžiąja lotyniška raide I) žymės didžiosios „sans serif“ šrifto raidės,pavyzdžiui, A,B,C ir t. t.
Rangas. Multivektoriai gali būti įvairių rangų (angl. grades) — skaliarai,vektoriai, bivektoriai, trivektoriai ir t. t. Rangas parodo, kiek skirtingų baziniųvektorių yra sandaugoje eiejek · · · Pavyzdžiui, A = 3e12 ir B = e12 + 2e23yra to paties antro rango multivektoriai. Vieno ir to paties rango multivekto-riai vadinami homogeniniais. Homogeninių multivektorių kaip nors specialiainežymėsime, bet jei yra nurodytas multivektoriaus rangas, suprasime, kad tu-rimas mintyje homogeninis multivektorius. Jei multivektorių sudaro skaliaras,vektorius, trivektorius ar kokių nors kitų rangų nariai, sakoma, kad multivekto-rius yra nehomogeninis. Nehomogeninis multivektorius neturi apibrėžto rango.Pavyzdžiui, multivektoriusM = 3+ 2e1 + e2 − 4e12 yra nehomogeninis. Jamekampiniais skliausteliais, kuriuos vadinsime rango projektoriais, galime išskirtiskaliarinę, vektorinę ir bivektorinę dalis,
M = 〈M〉0 + 〈M〉1 + 〈M〉2 ,kur 〈M〉0 = 3, 〈M〉1 = 2e1 + e2 ir 〈M〉2 = −4e12.
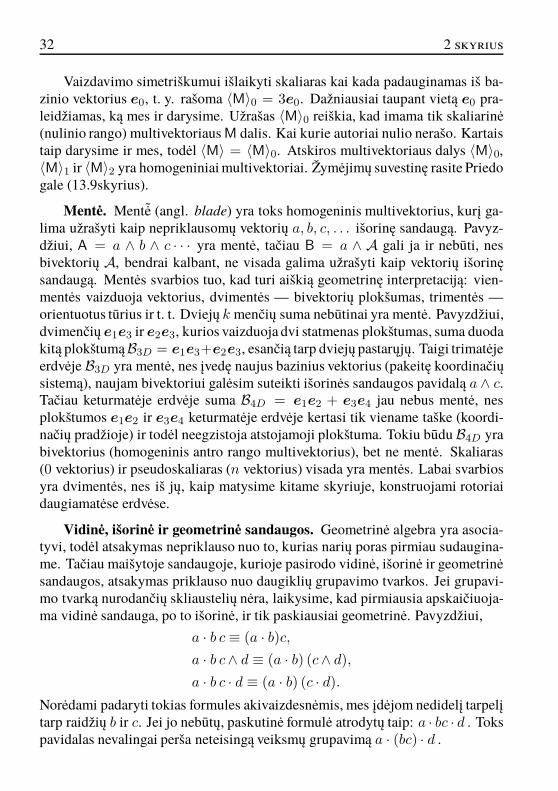
32 2 skyrius
Vaizdavimo simetriškumui išlaikyti skaliaras kai kada padauginamas iš ba-zinio vektorius e0, t. y. rašoma 〈M〉0 = 3e0. Dažniausiai taupant vietą e0 pra-leidžiamas, ką mes ir darysime. Užrašas 〈M〉0 reiškia, kad imama tik skaliarinė(nulinio rango) multivektoriausM dalis. Kai kurie autoriai nulio nerašo. Kartaistaip darysime ir mes, todėl 〈M〉 = 〈M〉0. Atskiros multivektoriaus dalys 〈M〉0,〈M〉1 ir 〈M〉2 yra homogeniniai multivektoriai. Žymėjimų suvestinę rasite Priedogale (13.9skyrius).
Mentė. Mentė (angl. blade) yra toks homogeninis multivektorius, kurį ga-lima užrašyti kaip nepriklausomų vektorių a, b, c, . . . išorinę sandaugą. Pavyz-džiui, A = a ∧ b ∧ c · · · yra mentė, tačiau B = a ∧ A gali ja ir nebūti, nesbivektorių A, bendrai kalbant, ne visada galima užrašyti kaip vektorių išorinęsandaugą. Mentės svarbios tuo, kad turi aiškią geometrinę interpretaciją: vien-mentės vaizduoja vektorius, dvimentės — bivektorių plokšumas, trimentės —orientuotus tūrius ir t. t. Dviejų k menčių suma nebūtinai yra mentė. Pavyzdžiui,dvimenčių e1e3 ir e2e3, kurios vaizduoja dvi statmenas plokštumas, suma duodakitą plokštumąB3D = e1e3+e2e3, esančią tarp dviejų pastarųjų. Taigi trimatėjeerdvėje B3D yra mentė, nes įvedę naujus bazinius vektorius (pakeitę koordinačiųsistemą), naujam bivektoriui galėsim suteikti išorinės sandaugos pavidalą a ∧ c.Tačiau keturmatėje erdvėje suma B4D = e1e2 + e3e4 jau nebus mentė, nesplokštumos e1e2 ir e3e4 keturmatėje erdvėje kertasi tik viename taške (koordi-načių pradžioje) ir todėl neegzistoja atstojamoji plokštuma. Tokiu būdu B4D yrabivektorius (homogeninis antro rango multivektorius), bet ne mentė. Skaliaras(0 vektorius) ir pseudoskaliaras (n vektorius) visada yra mentės. Labai svarbiosyra dvimentės, nes iš jų, kaip matysime kitame skyriuje, konstruojami rotoriaidaugiamatėse erdvėse.
Vidinė, išorinė ir geometrinė sandaugos. Geometrinė algebra yra asocia-tyvi, todėl atsakymas nepriklauso nuo to, kurias narių poras pirmiau sudaugina-me. Tačiau maišytoje sandaugoje, kurioje pasirodo vidinė, išorinė ir geometrinėsandaugos, atsakymas priklauso nuo daugiklių grupavimo tvarkos. Jei grupavi-mo tvarką nurodančių skliaustelių nėra, laikysime, kad pirmiausia apskaičiuoja-ma vidinė sandauga, po to išorinė, ir tik paskiausiai geometrinė. Pavyzdžiui,
a · b c ≡ (a · b)c,a · b c∧ d ≡ (a · b) (c∧ d),a · b c · d ≡ (a · b) (c · d).
Norėdami padaryti tokias formules akivaizdesnėmis, mes įdėjom nedidelį tarpelįtarp raidžių b ir c. Jei jo nebūtų, paskutinė formulė atrodytų taip: a · bc · d . Tokspavidalas nevalingai perša neteisingą veiksmų grupavimą a · (bc) · d .

Svarbiausios geometrinės algebros sąvokos ir aksiomos 33
Kanoninė indeksų forma. Knygoje neortogonalių bazių beveik nenaudosi-me. Ortogonalūs baziniai vektoriai tenkina sąlygą ei · ej = 0, jei i 6= j. Dėlšios priežasties bazinius multivektoriaus elementus galima rašyti įvairiu pavida-lu, pavyzdžiui,
e123 = e1e2e3 = e1 ∧ e2 ∧ e3 .
Kanoninė indeksų forma reiškia bazinių vektorių išrikiavimą indeksų didėjimotvarka. Jei indeksai nėra tinkamai išrikiuoti, kanoninę formą visada galima gautipritaikius paprastą taisyklę. Perkėlus indeksą per nelyginį indeksų skaičių, žen-klas keičiamas į priešingą, o keliant per lyginį bazinių vektorių skaičių, jis išliekatas pats, pavyzdžiui,
e321 = e132 = −e123 .
Pseudoskaliaras. Didžiausion-tojo rango multivektorių (jis visada tėra vie-nas, todėl visada homogeninis ir sudaro n mentę) vadinsime pseudoskaliaru ir,nežiūrint visų kitų susitarimų, visada žymėsime didžiąja lotyniška raide I . Cl2,0,Cl1,1 ir Cl0,2 algebrose tai bivektorius I = e1 ∧ e2, Cl3,0 algebroje — tri-vektorius I = e1 ∧ e2 ∧ e3, reliatyvistinėje Cl1,3 algebroje — keturvektoriusI = e1 ∧ e2 ∧ e3 ∧ e4. Pasinaudojus minėta indeksų perstatymo taisykle ne-sunku įsitikinti, kad pseudoskaliaro kvadratas I2 = ±1, kur ženklas priklausonuo konkrečios algebros. Geometrinės algebros formules supaprastinti yra dauglengviau žinant, kaip konkrečioje algebroje I perkeliamas per homogeninį mul-tivektorių. Kaip sako šio elemento pavadinimas, elementas I arba komutuoja suvisais algebros elementais, arba su vienais komutuoja, o su kitais antikomutuoja.
Signatūra. Dauginant multivektorius tam tikroje bazėje dažnai pasirodo tųpačių bazinių vektorių sandaugos, pavyzdžiui, e1e1 = e11, e2e2e1 = e221 irpan. Tokius narius prastinant, priklausomai nuo vektoriaus signatūros, atsiras ar-ba plius, arba minus ženklas. Pavyzdžiui, jei skaičiuojame Cl2,0 algebroje, turimee1e1 = +1 ir e2e2 = +1, todėl e11 = 1 ir e221 = e1. Tuo tarpu Cl1,1 algebrosvektorių signatūra yra maišyta, e1e1 = +1 ir e2e2 = −1, todėl e11 = 1, bete221 = −e1. Cl3,0 algebroje, kurios vektorių signatūra (+1,+1,+1), sandaugąe1e23e31e2, pavyzdžiui, prastiname tokiu būdu:
e1e23e31e2 = e1e2e3e3e1e2 = e1e2e1e2 = −e1e1e2e2 = −1 .
Geometrinėje algebroje tokio ir panašaus tipo prastinimus sutiksime labai dažnai,todėl juos reikia išmokti atlikti mintyse, arba pasinaudoti tam reikalui skirtaisprograminiais paketais.

34 2 skyrius
Dydis, modulis, magnitudė, norma. Kaip išsiaiškinome, geometrinės al-gebros elementai turi kryptį ir dydį. Visi išvardytieji terminai — dydis, modu-lis, magnitudė, norma (vektoriams dar galėtume pridėti „ilgis“, bivektoriams —„plotas“ ir t. t.) — reiškia tą pačią skaliarinę multivektoriaus charakteristiką,apskaičiuojamą pagal bendrą formulę 〈Mr
‹Mr〉0. Deja, mokslinėje literatūrojeiki šiol nenusistovėjo vieningas terminas šiai skaliarinei charakteristikai įvardy-ti, todėl pateiktus pavadinimus laikysime sinonimais. Tolesniuose skyriuose suvisomis čia paminėtomis savybėmis susipažinsime plačiau.

3. Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros
Šiame skyriuje susipažinsimesu dvimatėmis geometrinėmis algebromis. Dvi-matėje plokštumoje, be euklidinės Cl2,0 algebros, dar galima sukonstruoti dvikitas geometrines algebras, besiskiriančias savo bazinių vektorių normavimo sa-vybėmis. Viena jų, Cl0,2 arba kvaternionų algebra, suvaidino svarbų vaidmenįmatematikos istorijoje. Ji plačiai taikoma ir šiandien. Pavyzdžiui, kvaternionainaudojami lėktuvų ir kosminių aparatų navigacijoje.
3.1. Cl2,0 algebra. Planimetrija
Šios algebros vektorinė erdvė turi du bazinius vektorius e1 ir e2. Normuotibaziniai vektoriai tenkina sąlygą e21 = e22 = 1. Jie vadinami ortogonaliais, nesjų vidinė sandauga lygi nuliui, e1 ·e2 = 0. Taigi, du ortonormuoti Cl2,0 algebrosbaziniai vektoriai tenkina sąlygas
e21 = e22 = 1, e1 · e2 = 0, (3.1)
todėl geometrinė sandauga ortonormuotoje bazėje nesiskiria nuo išorinės san-daugos,
e1e2 = e1 · e2 + e1 ∧ e2 = 0 + e1 ∧ e2 = e1 ∧ e2. (3.2)
Kadangi e1 ∧ e2 = −e2 ∧ e1, tai e1e2 = −e2e1. Šią formulę sujungę su (3.1)sąlyga, ortonormuotų vektorių bazės savybes glaustai galėsime užrašyti taip:
eiej + ejei = 2δij, (3.3)
kur δij yra Kroneckerio delta funkcija: δij = 1, jei i = j ir δij = 0, jei i 6= j.Jei visi vektoriai ei yra tiesiškai nepriklausomi, formulę (3.3) galima laikyti or-tonormuotos vektorių bazės apibrėžimu. Kadangi bet koks mėginimas pagamintitrivektorių duoda nulį (nes sandaugoje būtinai pasikartos arba e1, arba e2 vekto-rius), tai Cl2,0 algebros baziniai elementai yra
1 e1, e2 e1 ∧ e21 skaliaras 2 vektoriai 1 pseudoskaliaras, (3.4)
35

36 3 skyrius
3.1 lentelė. Cl2,0 algeb-ros ir jos lyginio pogru-pioC = Cl+2,0, atitinkan-čio kompleksinius skai-čius, daugybos lentelės
Cl2,0 1 e1 e2 e121 1 e1 e2 e12e1 e1 1 e12 e2e2 e2 −e12 1 −e1e12 e12 −e2 e1 −1
C 1 e121 1 e12e12 e12 −1
kur skaliarų baziniu elementu laikome vienetą. Bazinis elementas, kurį sudarodaugiausia sudaugintų vektorių (mūsų atveju tai bivektorius), vadinamas pseudo-skaliaru. Tokiu būdu plokštumos geometrijai (planimetrijai) aprašyti reikalingibaziniai elementai yra tokie: vienas skaliaras, du ortogonalūs vektoriai ir vienasvienetinis bivektorius. Taupydami vietą, ortonormuotiems baziniams vektoriamstoliau visur vietoje e1 ∧ e2 ir e1e2 rašysime e12,
e1e2 = e1 ∧ e2 ≡ e12 . (3.5)
Algebra Cl2,0, kaip ir bet kuri kita algebra, pagal savo apibrėžimą yra užda-ra. Tai reiškia, kad tarpusavyje dauginant jos bazinius elementus naujų baziniųelementų neatsiranda. Pavyzdžiui, padauginę e12 iš e1 bei pasinaudoję baziniųvektorių antikomutacija ir (3.1) savybe e1e1 = e21 = 1, randame
e12e1 = (e1e2)e1 = e1e2e1 = −e2(e1e1) = −e2. (3.6)
Panašiai apskaičiuojame sandaugą
e12e2 = (e1e2)e2 = e1(e2e2) = e1. (3.7)
Tokius skaičiavimus reikia išmokti atlikti mintyse. Pavyzdžiui, iš formulės e12e1iš karto matyti, kad sukeitus vietomis paskutinius du indeksus, gausime minusoženklą, o šalia atsiradę du vienodi indeksai išnyks.
Jei e12 pakelsime kvadratu, rasime
e212 = (e1 ∧ e2)(e1 ∧ e2) = (e1e2)(e1e2) = e1e2e1e2
= −e1e2e2e1 = −e1(e2e2)e1 = −e1e1 = −1 .(3.8)
Iš čia matome, kad bazinio elemento e12 kvadratas lygus minus vienetui, t. y. jispanašus į kompleksinių skaičių algebros menamą vienetą, tačiau skiriasi nuo jotuo, kad nekomutuoja su vektoriais. Panašiu būdu tarpusavyje sudauginę visusbazinius algebros elementus sudarome 3.1 daugybos lentelę. Naudojant ją betkokią sudėtingą Cl2,0 elementų sandaugą suvedame į bazinių elementų sumą.
Geriau įsižiūrėję į 3.1 lentelę, joje pamatysime poalgebrį 1, e12, suside-dantį iš dviejų elementų, skaliaro ir bivektoriaus. Jo daugybos lentelė išskirtadešinėje. Kadangi inversija nekeičia poalgebrio elementų ženklo, jis vadinamaslyginiu poalgebriu ar poaibiu ir žymimas Cl+2,0. Kaip netrukus matysime, poaibis

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 37
1, e12 realizuoja sukimus plokštumoje, panašiai kaip dauginimas iš kompleksi-nių skaičių suka vektorius kompleksinėjeplokštumoje. Kadangi tiek bivektoriause212 = −1, tiek ir menamojo vieneto i2 = −1 kvadratai yra neigiami skaičiai,galime teigti, kad Cliffordo algebra Cl2,0 kaip poalgebrį savyje turi kompleksiniųskaičių C algebrą, būtent Cl+2,0.
Pasinaudoję baziniais elementais 1, e1, e2, e12, galime užrašyti Cl2,0 al-gebros bendriausio pavidalo multivektorių:
A = a0 + a1e1 + a2e2 + a3e12 , (3.9)
kur visi ai yra realūs koeficientai. Skaliaro, vektoriaus ar pseudoskaliaro poerd-viams išskirti, sutarkime naudoti laužtinius (bra-ket) skliaustelius. Jų apačiojeesantis indeksas pasako, kurio rango elementų poerdvį išskiriame:
〈A〉0 ≡ 〈A〉 = a0 nulinio rango, (3.10a)
〈A〉1 = a1e1 + a2e2 pirmo rango, (3.10b)
〈A〉2 = a2e12 antro rango. (3.10c)
Nulinio rango elemento (skaliaro) rangas dažnai nerašomas, žymima tiesiog 〈A〉.Atkreipkite dėmesį, kad 〈A〉1 poerdvis yra dvimatis. Jį perkloja vektoriai 〈A〉1 ≡a = a1e1+a2e2. Čia bazinių elementų suma turi prasmę, nusakomą postulatais(2.1) ir (2.2). Tuo tarpu (3.9) formulėje sumos ženklo prasmė daugiau simboli-nė, nes joje sumuojame skirtingo rango multivektorius („obuolius“ ir „kriaušes“).Cl2,0 algebroje bivektorių poerdvį sudaro tik vienas elementas, 〈A〉2 = A = I .Kai kada (pavyzdžiui, programuojant) multivektorių būna patogu pavaizduoti są-rašo pavidalu,
A = a0, a1, a2, a3, (3.11)
iš kurio aišku, kad skirtingų rangų elementai multivektoriuje nesimaišo.
3.2. Multivektorių daugyba
Multivektorių sudėties formulė (2.15), kuri išplaukia iš tiesinės erdvės pos-tulatų (2.1) ir (2.2), yra vienoda visoms algebroms. Įdomesnė ir sudėtingesnė yramultivektorių geometrinė daugyba. Pradžiai paimkime du vektorius,
a = a1e1 + a2e2 , (3.12a)
b = b1e1 + b2e2 , (3.12b)
kurių geometrinė sandauga yra ab = a · b + a ∧ b. Prisiminę, kad e1 ∧ e1 =e2 ∧ e2 = 0 ir e21 = e22 = 1, įsitikiname, kad vidinė sandauga yra skaliaras
a · b = a1b1 + a2b2 . (3.13)

38 3 skyrius
Vektorių išorinę sandaugą,
a ∧ b = (a1e1 + a2e2) ∧ (b1e1 + b2e2) , (3.14)
apskaičiuojame pasinaudoję (2.4) aksiomomis:
a∧b = a1b1(e1∧e1)+a1b2(e1∧e2)+a2b1(e2∧e1)+a2b2(e2∧e2) . (3.15)
Kadangi e1∧e1 = e2∧e2 = 0 ir e1∧e2 = −e2∧e1, rezultatą supaprastiname,
a ∧ b = a1b2(e1 ∧ e2) + a2b1(e2 ∧ e1) , (3.16)
ir užrašome dar kompaktiškiau:
a ∧ b = (a1b2 − a2b1)e1 ∧ e2 =
∣∣∣∣∣a1 a2b1 b2
∣∣∣∣∣e1 ∧ e2 . (3.17)
Gavome bivektorių, kurio dydį paskutinėje formulėje nusako determinantas. Tai-gi, dviejų vektorių geometrinė sandauga, kaip ir turi būti, duoda skaliarą ir bivek-torių, kuriuos išreiškėme per vektorių a ir b koordinates. Standartinio vektorinioskaičiavimo skaliarinė ir vektorinė sandaugos duoda lygiai tokias pat išraiškas.Tačiau apskaičiavimai bazėje 1, e1, e2, e12 yra bendresni, nes leidžia dirbtiįvairiose (vektorinėse, bivektorinėse ir t. t.) erdvėse vienu metu. Konkrečio-je bazėje skaičiuoti tikslinga, kai iškyla neaiškumų, kaip apskaičiuoti rezultatąsimboliškai arba prireikia formulių, užrašytų koordinatiniame pavidale.
3.1 pavyzdys. Pasinaudoję formule (3.17) parodysim, kad Cl2,0 algebroje trijų vekto-rių išorinė sandauga visada lygi nuliui, t. y. a∧ b∧ c = 0. Užrašę koordinatiniu pavidaluturime
a ∧ b ∧ c = (a ∧ b) ∧ c = (a1b2 − a2b1)e12 ∧ (c1e1 + c2e2) . (3.18)
Sudauginę randame e12 ∧ e1 = e1e2 ∧ e1 = e1 ∧ e2 ∧ e1 = −e1 ∧ e1 ∧ e2 = 0, nese1 ∧ e1 = 0. Panašiai randame e12 ∧ e2 = 0. Savybę a∧ b∧ c = 0 galime interpretuotikaip sąlygą, kad trys vektoriai guli vienoje plokštumoje.
Kadangi Cl2,0 algebra uždara, dviejų multivektorių sandaugos rezultatas yramultivektorius C = AB, priklausantis tai pačiai algebrai, C ∈ Cl2,0, todėl C =〈AB〉+〈AB〉1+〈AB〉2. Visus dviejų multivektoriųA irB geometrinės sandaugossandus lengviausia apskaičiuoti žiūrint į 3.1 lentelę. Pasinaudoję ja, išreikštairandame
C = c0 + c1e1 + c2e2 + c3e12 , (3.19a)

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 39
kurc0 = a0b0 + a1b1 + a2b2 − a3b3 ,
c1 = a0b1 + a1b0 + a3b2 − a2b3 ,
c2 = a0b2 + a2b0 + a1b3 − a3b1 ,
c3 = a0b3 + a3b0 + a1b2 − a2b1 .
(3.19b)
Gautas atsakymas gali pasirodyti labai jau sudėtingas. Aukštesnių dimensijų erd-vėse sandaugos rezultatas yra dar „baisesnis“. Gelbsti tai, kad praktikoje bendradviejų multivektorių sandauga pasirodo labai retai, o skaičiavimus atliekant be-koordinatiniubūdu šių sunkumų išvis neiškyla. Be to, kaip matysime, konkrečio-je bazėje skaičiavimai atliekami retai. Skaitytojui siūlome savarankiškai padau-ginti A iš B ir B iš A ir įsitikinti, kad skaliarinės dalys sutampa: 〈AB〉 = 〈BA〉.
3.3. Multivektoriaus norma
Dabar, kai jau žinome, kaip dauginti ir apgręžti multivektorius, galime atliktidaugiau veiksmų. Pradžioje apskaičiuokime skaliaro ir pseudoskaliaro sumosD = ar + aie12 kvadratą:
D2 = (ar+aie12)(ar+aie12) = (a2r−a2i )+2araie12 = 〈D2〉+〈D2〉2. (3.20)
Geriau įsižiūrėję matome, kad gauto rezultato struktūra primena kompleksinioskaičiaus kvadratą: (ar + iai)
2 = (a2r − a2i ) + i2arai. Kompleksinio skaičiausmodulio kvadratą apskaičiuojame kompleksinį skaičių daugindami iš jam komp-leksiškai jungtinio, t. y. (ar + iai)(ar + iai)
∗ = (ar + iai)(ar− iai) = a2r + a2i .Kompleksinio jungtinumo transformacijos analogas geometrinėje algebroje yramūsų aptarta apgrąžos operacija (2.22). Jos savybės užtikrina, kad geometriniųsandaugų DD ir DD rezultatas bus skaliaras. Iš tikrųjų, sudauginę randame
DD = (ar + aie12)(ar − aie12) = a2r + a2i . (3.21)
Be to, DD = DD. Dabar padauginkime bendro pavidalo multivektorių A išapgręžto multivektoriaus A:
AA = (a0 + a1e1 + a2e2 + a3e12)(a0 + a1e1 + a2e2 − a3e12)
= (a20 + a21 + a22 + a23) + (a0a1 + a1a0 + a3a2 + a2a3)e1
+ (a0a2 + a2a0 − a1a3 − a3a1)e2 + (−a0a3 + a3a0 + a1a2 − a2a1)e12
= (a20 + a21 + a22 + a23) + 2(a0a1 + a2a3)e1 + 2(a0a2 − a1a3)e2.(3.22)
Atsakymas susideda iš skaliaro
〈AA〉 ≡ 〈AA〉0 = a20 + a21 + a22 + a23 (3.23)

40 3 skyrius
ir vektoriaus
〈AA〉1 = 2(a0a1 + a2a3)e1 + 2(a0a2 − a1a3)e2. (3.24)
Kvadratinė šaknis iš skaliarinės dalies»〈AA〉 literatūroje vadinama multivekto-
riaus magnitude, dydžiu, norma arba moduliu. Kaip matyti iš (3.23) išraiškos, jiapibendrina vektoriaus modulio (ilgio) sąvoką.
3.4. Vidinės ir išorinės sandaugos trigonometrinis pavidalas
Žinant vektorių ilgius ir kampą tarp jų, vidinę (3.13) ir išorinę (3.17) sandau-gas galima apskaičiuoti ir neįvedus koordinačių sistemos. Tuo tikslu naudojamastrigonometrinis atvaizdas
a · b = |a||b| cosϕ, (3.25)
kurϕ kampas matuojamas nuo a link b prieš laikrodžio rodyklę, o |a| =»a21 + a22
ir |b| =»b21 + b22 yra vektorių moduliai. Geometrinėje algebroje juos galima ap-
skaičiuoti iš formulių |a| =√aa ir |b| =
√bb.
Kaip jau buvo parodyta, (3.17) formulėje prie bivektoriaus esantis skaliarasa1b2 − a2b1 = S yra ne kas kita, o lygiagretainio, kurį sudaro vektoriai a ir b,plotas. Kadangi lygiagretainio plotą galima užrašyti per jį sudarančius vektoriusir kampą tarp jų, S = |a||b| sinϕ, tai išorinę sandaugą dar galima užrašyti ir taip:
a ∧ b = Se12 = |a||b| sinϕ e12 , (3.26)
kur e12 primena, kad turime reikalų su orientuota plokštuma. Priminsime, kadϕ didėja nuo e1 link e2 judant prieš laikrodžio rodyklę. Šią sandaugą nesunkuapskaičiuoti ir geometrinės algebrosmetodais. Iš tiesų, sudauginęab = a·b+a∧bir ba = a · b− a ∧ b, gauname
abba = (a · b)2 − (a ∧ b)2 . (3.27)
Bet bb = bb = |b|2 yra skaliaras, kuris komutuoja su vektoriumi a. Panašiaiapskaičiuojam aa. Taigi, įstatę (3.25) į (3.27) galime išreikšti (a ∧ b)2 narį:
(a ∧ b)2 = −|a|2|b|2(1− cos2 ϕ) = −|a|2|b|2 sin2 ϕ . (3.28)
Kadangi Cl2,0 algebroje pseudoskaliaras e212 = −1, minus vienetą pakeitę kvad-ratu e212 ir po to ištraukę šaknį, vėl gauname (3.26) formulę.
Iš formulių (3.25) ir (3.26) išplaukia dar viena svarbi savybė. Būtent, dviejųvektorių geometrinę sandaugą galima išreikšti per trigonometrines funkcijas:
ab = a · b+ a ∧ b = |a||b|(cosϕ+ e12 sinϕ). (3.29)

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 41
3.1 pav. Vektoriaus a ortogonali pro-jekcija a‖ ir rejekcija a⊥ vektoriaus batžvilgiu
Įvedus eksponentės funkciją, kurios argu-mentas yra bivektorius, išraiškai skliauste-liuose galima suteikti dar ir tokį pavidalą:
cosϕ+ e12 sinϕ = ee12ϕ. (3.30)
Jos teisingumu lengva įsitikinti eksponentęišskleidus eilute, kurią, pasinaudojus savy-be e212 = −1, galime perrašyti kaip lyginioir nelyginio laipsnio narių eilučių sumą
ee12ϕ =∞∑
n=0
(e12ϕ)n
n!=
∞∑
n=0
(−1)2nϕ2n
(2n)!+ e12
∞∑
n=0
(−1)2n+1ϕ2n+1
(2n+ 1)!. (3.31)
Lyginių laipsnių eilutė atitinka cosϕ funkciją. Nelyginių narių eilutė yra sinϕskleidinys. Taigi, geometrinę dviejų vektorių sandaugą (3.29) galima užrašytieksponente
ab = |a||b|ee12ϕ. (3.32)
Priminsime, kad panašią lygybę eiϕ = cosϕ + i sinϕ tenkina kompleksiniaiskaičiai.
Kai a ir b yra vienetiniai vektoriai (|a| = |b| = 1), vektorių geometrinė san-dauga yra tiesiog eksponentė nuo bivektoriaus,
ab ≡ R(ϕ) = ee12ϕ, e212 = −1 . Cl2,0 ROTORIUS (3.33)
Tokios eksponentės savybės labai panašios į kompleksinės eksponentės eiϕ, to-dėl nenuostabu, kad kaip ir kompleksinė eksponentė vektoriniame skaičiavime,eksponentė nuo bivektoriaus (3.33) leidžia sukti vektorius plokštumoje. Mul-tivektorinės funkcijos, kuriomis realizuojami tokie sukimai, vadinami rotoriais.Taigi, (3.33) formulė rodo, kad į dviejų vienetinių vektorių geometrinę sandaugągalima žvelgti ne tik kaip į geometrinį objektą, bet ir kaip į geometrinės algebroselementų transformaciją R(ϕ), — sukimo operatorių arba rotorių. Su rotoriaissusidursime labai dažnai.
3.5. Ortogonalioji projekcija ir rejekcija
3.1 pav. parodyti du iš to paties taško išeinantys vektoriai a ir b. Rasimevektoriaus a projekciją į vektorių b, kurią žymėsime a‖. Vienetinis vektorius,
kuris lygiagretus b, yra b = b/|b|. Vektoriaus a projekcijos modulis yra |a‖| =|a| cosϕ. Todėl vektorius a‖ bus
a‖ = |a‖| b = |a||b| cosϕ b
|b|2 . (3.34)

42 3 skyrius
Kadangi |a||b| cosϕ = a · b, ir kaip išplaukia iš (1.16) b/|b|2 = b−1, turimetokią išraišką projekcijai:
a‖ = (a · b)b−1 . PROJEKCIJA (3.35)
Atkreipkite dėmesį, kad projekcija nepriklauso nuo vektoriaus b, į kurį projek-tuojame, ilgio, todėl jį išprastinę galime rašyti a‖ = (a · b)b−1 = (a · b)b. Kaipvėliau matysime, geometrinėje algebroje galima projektuoti ne tik vektorių į vek-torių, bet ir vieno rango multivektorių į kito rango multivektorių. (3.35) formulęlengvai pervesime į koordinatinį pavidalą, jei prisiminsim, kad a = a1e1+a2e2,b = b1e1+b2e2 ir b−1 = b/|b|2 = (b1e1+b2e2)/(b
21+b
22). Sudauginę randame
a‖ =a1b1 + a2b2b21 + b22
Äb1e1 + b2e2
ä. (3.36)
Vektoriaus a sandas a⊥ vadinamas rejekcija. Ji taip pat pavaizduota 3.1 pav.,
a⊥ = a − a‖ = a− (a · b)b−1 = (ab− a · b)b−1 . (3.37)
Prisiminę, kad geometrinė sandauga yra išorinės ir vidinės sandaugų suma, už-rašome tokią glaustą vektoriaus rejekcijos išraišką:
a⊥ = (a ∧ b)b−1 . REJEKCIJA (3.38)
Sudėję ortogonalią projekciją ir rejekciją gauname pirminį vektorių
a‖ + a⊥ = (a · b)b−1 + (a ∧ b)b−1 = (a · b+ a ∧ b)b−1 = abb−1 = a. (3.39)
Atkreipkitedėmesį, kad projekcija ir rejekcija yra geometrinės algebros vektoriai.Tai akivaizdžiai matosi, pavyzdžiui, iš (3.36) formulės. Tuo tarpu tradiciniuosegeometrijos vadovėliuose jie traktuojami kaip skaliarai. Ortogonali projekcija irrejekcija yra viena kitai statmenos, a‖ · a⊥ = 1
2(a‖a⊥ + a⊥a‖) = 0. Iš tikrųjų,įstatę (3.35) ir (3.38) ir pasinaudoję apibrėžimais a · b = 1
2(ab+ ba) ir a ∧ b =12 (ab− ba), randame
a‖ · a⊥ =1
2
[(ab+ ba)b−1(ab− ba)b−1 + (ab− ba)b−1(ab+ ba)b−1
]. (3.40)
Kadangi visos geometrinės sandaugos susiprastina, todėl a‖ ·a⊥ = 0. Šis pavyz-dys moko, kad vidine ir išorine sandaugomis patogu naudotis, jei norime geomet-riškai interpretuoti formules ar konstruoti lygtis. Tačiau prastinant lygtis dažnai(bet ne visada) jas būna patogu perrašyti geometrinėmis sandaugomis, panašiaikaip (3.40) pavidale.

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 43
3.6. Atspindys ir vektoriaus sukimas plokštumoje
3.2 pav. Vektoriaus r atspindys vekto-riaus a atžvilgiu
3.2 pav. pavaizduotas r vektoriausatspindys a vektoriaus atžvilgiu. Po at-spindžio gauname naują vektorių r′. Išpaveikslo matyti, kad lygiagrečioji vek-toriaus komponentė išlieka tokia pati, ostatmenoji pakeičia ženklą į priešingą,
r′ = r′‖ + r′⊥ = r‖ − r⊥ . (3.41)
Projekciją r‖ ir rejekciją r⊥ išreiškę for-mulėmis (3.35) ir (3.38), turime
r′ = (r · a)a−1 − (r ∧ a)a−1
= (r · a − r ∧ a)a−1 = (a · r + a ∧ r)a−1
= ara−1 .
(3.42)
Iš tikrųjų formulėje svarbi tik vektoriaus a, kurio atžvilgiu atliekamas atspindys,kryptis, nes a = |a|a ir a−1 = a/|a|, todėl skaliaras |a| susiprastins. Tokiu bū-du geometrinė sandauga leidžia labai paprastai užrašyti atspindį bekoordinatiniupavidalu:
r′ = ara . ATSPINDYS (3.43)
Tai viena gražiausių planimetrijos formulių, užrašytų geometrinės algebros kalba.Dabar panagrinėkime sudėtingesnį, kombinuotą atspindį. Iš 3.3 paveikslo
matyti, kad objektą (rodyklę) galima pasukti atlikus du vienas po kito sekančiusatspindžius, pirmą vektoriaus b, o antrą vektoriaus a atžvilgiu. Po pirmojo at-spindžio taškas C pereina į C′ , o po antrojo — į tašką C′′. Pirmasis atspindysvektorių r perveda į vektorių r′ = brb−1. Antrasis atspindys savo ruožtu r′ per-veda į r′′ = ar′a−1. Abiejų atspindžių kompozicija duoda
r′′ = a(brb−1)a−1 = (ab)r(b−1a−1)
= (ab)r(ab)−1 .(3.44)
Pasinaudoję bivektoriaus eksponente (3.33) gautą formulę galime perrašyti kom-paktišku pavidalu
r′′ = ee12ϕr(ee12ϕ)−1 . (3.45)
Kadangi exp(−e12ϕ) exp(e12ϕ) = (cosϕ− e12 sinϕ)(cosϕ+ e12 sinϕ) = 1,tai (ee12ϕ)−1 = e−e12ϕ ir formulei galima suteikti labiau įprastą pavidalą,
r′′ = ee12ϕre−e12ϕ. (3.46)

44 3 skyrius
3.3 pav. Taško C atspindys vekto-riaus b, o po to vektoriaus a, atžvil-giu yra ekvivalentiškas posūkiui apievektorių a ir b pradžios tašką. Posū-kio kampas 2ϕ lygus dvigubam kam-pui ϕ tarp vektorių a ir b
Ši formulė aprašo vektoriaus r posūkį2ϕ kampu plokštumoje, kurią sudaro du vek-toriai a ir b, kampas tarp kurių yra ϕ. Tiesąsakant, apie vektorius a ir b galime visai pa-miršti (formulėje (3.46) jie paslėpti bivekto-riuje) ir manyti, kad vektoriaus r pasukimą2ϕ kampu plokštumoje atlieka bivektoriuse12 = e1 ∧ e2. Pastebėsime, kad eksponen-tėje (rotoriuje) figūruoja tik pusė pasukimokampo. Vėliau matysime, kad lygiai tokiapati formulė (3.46) aprašo ir vektorių sukimądaugiamatėse euklidinėse erdvėse, tik plokš-tumą, kuriojevyksta sukimas kampu 2ϕ, nu-sako vienetinis bivektorius B,
r′′ = eBϕre−Bϕ, B2 = −1 .
SUKIMAS B PLOKŠTUMOJE
(3.47)
Formulė (3.47) sukimą aprašo bekoordinatiniu būdu.
3.2 pavyzdys. Parodysime, kad pasirinkus bazę iš (3.47) formulės išplaukia visiemsžinoma sukimo matrica. Jei r = xe1+ye2 , r′′ = x′′e1+y′′e2 ir B = e12 = e1∧e2 =e1e2, tada užrašę eksponentę trigonometrinėmis funkcijomis, kaip (3.30) formulėje, tu-rime
ee12ϕre−e12ϕ = (cosϕ+ e1e2 sinϕ)(xe1 + ye2)(cosϕ − e1e2 sinϕ)
= x′′e1 + y′′e2 .(3.48)
Sudauginę ir suprastinę sandaugas e1e2e1 = −e1e1e2 = −e2 ir pan., randame
x′′e1 + y′′e2 = (x cos 2ϕ+ y sin 2ϕ)e1 + (y cos 2ϕ − x sin 2ϕ)e2 . (3.49)
Sulyginę koeficientus prie tų pačių bazinių vektorių, gauname lygtis x′′ ir y′′:
x′′ = x cos 2ϕ+ y sin 2ϕ,
y′′ = −x sin 2ϕ+ y cos 2ϕ.(3.50)
Šias dvi lygtis galime pakeisti viena matricine lygtimi∣∣∣∣x′′
y′′
∣∣∣∣ =ïcos 2ϕ sin 2ϕ− sin 2ϕ cos 2ϕ
ò ∣∣∣∣xy∣∣∣∣ . (3.51)
Matome, kad nuo kampo priklausanti matrica yra ne kas kita, o gerai žinoma vektoriaussukimo plokštumoje 2ϕ kampu matrica.

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 45
3.4 pav. Trikampis, kurio kraštinės a,b, c ir vidiniai kampai α, β, γ. Kam-pas tarp vektorių a ir b yra γ′, todėlγ′ = π − γ
Formulėje (3.51) vietoje dvigubo kampogausime viengubą, jei rotorių eksponen-tėse ((3.47) formulė) esančius kampus pa-dalinsime pusiau, R = eBϕ/2. Tai, kadnorint vektorių pasukti kampu ϕ, rotoriu-je turime naudoti dvigubai mažesnį kam-pą yra labai svarbu. Tai reiškia, kad vek-toriaus ir rotoriaus periodiškumai skiria-si. Gerai žinome, kad vektorius sugrįž-ta į pradinę padėtį jį pasukus ϕ = 2πkampu. Tačiau šį posūkio kampą atitinkaϕ/2 = π kampas rotoriuje. Jei rotoriujeįstatysimekampąϕ/2 = 2π, tai vektoriusbus pasuktas kampu 4π. Pasirodo, gamtoje iš tiesų egzistuoja tokie objektai,pavyzdžiui, elektrono sukiniai, kurie į pradinę padėtį sugrįžta apsukti ne 2π, o 4π
kampu. Taigi, pusės kampo rotorius R = eBϕ/2 leidžia aprašyti tiek klasikinius,tiek ir kvantinius fizikinius dydžius.
(3.33) ir (3.47) formulės yra labai svarbios, nes jomis galima užrašyti su-kimus daugiamatėse erdvėse. Be to, (3.33) formulė keičia visą mūsų sampratąapie sukimą ir sukimo geometrinę interpretaciją: geometrinėje algebroje sukimaivyksta tik orientuotose plokštumose (nagrinėjamu atveju e12 = e1 ∧e2 plokštu-moje), o ne aplink ašį, kaip mokoma senajame vektoriniame skaičiavime. Beje,planimetrijoje tokia sukimo ašis išvis neegzistuoja, nes ji turėtų būti statmenaplokštumai e1 ∧ e2. Tačiau tai reikštų, kad 2D erdvę išplėtėme į 3D erdvę.
3.7. Trikampis
Pailiustruosime algebros Cl2,0 taikymą planimetrijoje. Daug pavyzdžių išplanimetrijos galima rasti elektroninėje knygoje [6]. Trikampį galima nusaky-ti trimis slankiaisiais vektoriais, juos sujungus vieną paskui kitą, kaip parodyta3.4 paveiksle. Daugelis trikampio savybių išplaukia tiesiog iš to, kad taip sujung-tų vektorių suma lygi nuliui,
a+ b+ c = 0 . (3.52)
Parodysime, kad trikampio kraštinių ilgiai ir prieš šias kraštines esantys kampaitenkina vadinamąją sinusų teoremą:
sinα
|a| =sin β
|b| =sin γ
|c| . (3.53)

46 3 skyrius
Padauginę (3.52) lygtį išoriškai iš a, b ir c, gauname tokias bivektorines lygtis:
a ∧ b+ a ∧ c = 0 ,
b ∧ a+ b ∧ c = 0 , (3.54)
c ∧ a+ c ∧ b = 0 .
Pirmąją lygtį perrašę pavidalu a∧ (b+c) = 0 matome, kad vektorius a yra lygia-gretus likusių dviejų vektorių sumai, t. y. a‖(b+ c). Panašiai interpretuojamosir kitos dvi lygtys. Visas jas galima užrašyti viena eilute
a ∧ b = c ∧ a = b ∧ c , (3.55)
iš kurios matyti, kad orientuotų trikampių (dvigubi) plotai įvairių vektorių po-roms yra lygūs. Kita vertus, iš formulės (3.26) išplaukia, kad bivektorių moduliaitenkina lygybes
|a ∧ b| = |a||b| sinγ ,|b ∧ c| = |b||c| sinα , (3.56)
|c ∧ a| = |c||a| sinβ .Kadangi visi nariai nusako tą patį plotą, iš lygčių automatiškai išplaukia (3.53) sa-vybė. Pastebėsime, kad tikrieji kampai tarp vektorių yra α′ = π−α, β′ = π−βir γ ′ = π − γ , todėl sinα′ = sinα, cosα′ = − cosα, ir pan.
Dabar trikampio plotą išreikšime per pagrindo ir aukštinės vektorius. Tamaukštinę p (žr. 3.4 pav.) užrašysime kaip vienos iš šoninių kraštinių, pavyzdžiui,b, rejekciją (3.38),
p = (b ∧ a)a−1 . (3.57)
Geometriškai padauginę abi puses iš a, lygtį perrašome pavidalu
pa = b ∧ a . (3.58)
Kadangi p⊥a, tai p · a = 0. Todėl lygtį galime perrašyti ir taip:
a ∧ b = a ∧ p. (3.59)
Taigi, matome, kad dvigubas trikampio plotas a ∧ b yra lygus pagrindo ir aukš-tinės sandaugai a ∧ p = ap. Atkreipkit dėmesį, kad šios bivektorinės lygtiesabiejų pusių suprastinti iš a negalima, nes, kaip prisimename iš pirmojo skyriaus,žinant vien tik išorinę sandaugą, vienareikšmiškai lygties išspręsti neįmanoma.Atkreipkit dėmesį, kad plotas S turi orientaciją. Skaitinę ploto reikšmę rasime,apskaičiavę (3.58) lygties normą
(2S)2 = |pa|2 = (pa)pa = paap = |p|2|a|2, (3.60)

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 47
iš kur išplaukia visiems gerai žinomas rezultatas S = |p||a|/2. Jei pasinaudosimdešine (3.58) lygties puse ir (3.26) formule, užrašysim kitokią trikampio plotoformulę:
(2S)2 = (b ∧ a)2 = (|a||b| sinγ)2, (3.61)
iš kurios randame S = 12 |a||b| sinγ . Kampas γ , kaip parodyta 3.4 paveiksle,
yra kampas tarp a ir b. Iš pirmo žvilgsnio gali pasirodyti, kad planimetrijos aiš-kinimas geometrinės algebros sąvokomis yra mažiau akivaizdus už tradiciniusvadovėlinius aiškinimus. Dėl to būtų galima diskutuoti. Tačiau, jei uždavinysformuluojamas trimatėje, o tuo labiau keturmatėje erdvėje, visi įsivaizduojamivadovėlių pranašumai dingsta. Karališkasis sprendimo kelias eina per geometrinęalgebrą, nes skaičiavimo algoritmas bet kurių dimensijų erdvėse išlieka toks pats.Trimatės erdvės atveju planimetrijos uždavinį dar turėtume papildyti komplana-riškumo sąlyga a∧ b∧ b = 0, kuri reikalauja, kad visi trys vektoriai būtų vienojeplokštumoje.
3.8. Cl0,2 algebra
Cl0,2 algebrą, kitaip dar vadinamą kvaternionų algebra, atrado W. R. Hamil-tonas (tas pats, kurio garbei pavadintas „hamiltonianas“), ilgai ir nesėkmingaiieškojęs būdo, kaip išplėsti kompleksinių skaičių teoriją į trimatę erdvę. Pasa-kojama, kad išganinga mintis jam šovė 1843 m. spalio 16 d., kai jie kartu sužmona pasivaikščiojimo metu žengė per Brougham’o tiltą Dubline, Airijoje. Is-torija tvirtina, kad norėdamas įamžinti savo idėją jis čia pat ant akmeninio tiltoatramų išraižė savo garsiąją kvaternionų formulę1 ijk = −1. Formaliai kvater-nionų algebra panaši į ankstesniame skyriuje nagrinėtą Cl2,0 algebrą. Pastarojojevienetinių bazinių vektorių kvadratai lygūs vienetui, e21 = e22 = 1. Tačiau ati-džiau peržiūrėję geometrinės algebros postulatus, niekur nerasime reikalavimo,kad bazinių vektorių kvadratai privalo būti teigiami. Todėl Cl0,2 algebroje abiejųbazinių vektorių sandaugas iš savęs prilyginsime minus vienetui:
e1e1 = e2e2 = −1. (3.62)
Svarbiausias čia yra minuso ženklas. Vienetukas rodo, kad baziniai vektoriainormuoti. Kaip ir Cl2,0 algebros atveju, norint gauti uždarą sistemą, vektorinęerdvę tenka papildyti skaliaru (jį simboliškai vėl žymime vienetu 1) ir bivekto-riumi e1∧e2 ≡ e12. Kadangi baziniai vektoriai ortogonalūs, e1 ·e2 = 0, galimerašyti e1∧e2 = e1 ·e2+e1∧e2 = e1e2. Ši savybė kaip ir anksčiau reiškia, kad
1Tačiau 1865 m., t. y. po 22 metų, savo sūnui, kuris, kaip teigia ta pati graži istorija, darbūdamas mažas vis klausinėdavęs „Tėveli, ar jau sugalvojai formulę?“, laiške rašė: „ . . . na,žinoma, kaip užrašas jis jau nusitrynęs.“

48 3 skyrius
Cl0,2 1 e1 e2 e121 1 e1 e2 e12e1 e1 −1 e12 −e2e2 e2 −e12 −1 e1e12 e12 e2 −e1 −1
H 1 i j k1 1 i j ki i −1 k −jj j −k −1 ik k j −i −1
3.2 lentelė. Cl0,2 algebros ir kvaternionų H daugybos lentelės yra izomorfiškos
skirtingi vektoriai antikomutuoja,
eiej = −ejei, jei i 6= j. (3.63)
Sudarykime Cl0,2 algebros daugybos lentelę. Ją gauti labai paprasta. Pavyz-džiui, geometrinė sandauga e2e12 duoda e2e12 = e2e1e2 = −e1e2e2 = e1.Lentelėje galime pastebėti tris atskirus „menamus vienetus“, kurių kvadratai yraneigiami:
e21 = e22 = e212 = −1. (3.64)
Du iš jų yra vektoriai ir vienas bivektorius. Todėl vektorių a = a1e1 + a2e2pakėlę kvadratu gauname neigiamą skaičių (skaliarą),
a2 =(a1e1 + a2e2)(a1e1 + a2e2) =
− a21 − a22 + a1a2(e1e2 + e2e1) = −a21 − a22 < 0.(3.65)
Erdvė, kurioje vektorių kvadratai yra neigiami, vadinama neigiamos metrikoserdve. Tokiu būdu Cl2,0 algebros bazinė vektorinė erdvė yra teigiamos metrikoserdvė, tuo tarpu Cl0,2 algebra turi neigiamos metrikos bazinę vektorinę erdvę.
Veiksmai su multivektoriais Cl0,2 algebroje nieko nesiskiria nuo anksčiaunagrinėtų, tik skaičiuojant geometrines sandaugas vietoje 3.1 lentelės reikia nau-doti 3.2 daugybos lentelę. Pavyzdžiui, multivektorių P = p0 + p1e1 + p2e2 +p3e12 padauginę iš Q = q0 + q1e1 + q2e2 + q3e12, gauname multivektorių
QP =(q0p0 − q1p1 − q2p2 − q3p3) + (q0p1 + q1p0 + q2p3 − q3p2)e1
+ (q0p2 + q2p0 + q3p1 − q1p3)e2 + (q0p3 + q3p0 + q1p2 − q2p1)e12.(3.66)
Išskyrus ženklus, ši išraiška niekuo nesiskiria nuo Cl2,0 algebros multivektoriųsandaugos formulės (3.19). Todėl matematinių reiškinių pertvarkymo požiūriuCl0,2 algebra yra tokia pati kaip Cl2,0 ar kitos geometrinės algebros. Istoriškaitaip jau susiklostė, kad Cl0,2 algebra buvo smulkiai išnagrinėta anksčiau nei kurinors kita geometrinė algebra. Ji buvo pavadinta kvaternionų algebra H, o jojesusiformavusi sava terminija ir skaičiavimo būdai naudojami ir šiandien [7].

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 49
3.9. Kvaternionai
Pradžioje W. R. Hamiltonas bandė išplėsti kompleksinių skaičių teoriją, ku-rioje vietoje vieno būtų du menamieji vienetai, t. y. turėtume bazinius elementus1, i, j. Tam jis sugaišo dešimt metų, o visos jo pastangos nuėjo niekais. Dabaržinome, kad algebra su baze 1, i, j neegzistuoja. Hamiltonui pavyko pasiektitikslą tik įvedus tris menamuosius vienetus i, j ir k (jie vadinami baziniais kva-ternionais), pasižyminčius savybe
i2 = j2 = k2 = −1. (3.67)
Priešingai iki tol matematikams žinomoms algebroms, kvaternionų algebra pasi-rodė esanti nekomutatyvi:
jk = −kj = i, (3.68a)
ki = −ik = j, (3.68b)
ij = −ji = k. (3.68c)
Mišrių sandaugų ženklus bus lengva atgaminti, jei prisiminsime ant tilto turėklųišraižytą formulę
ijk = −1. (3.69)
Daugindami (3.69) formulės abi puses iš kairės/dešinės iš i, j ir k, nesunkiai at-gaminsime visą kvaternionų daugybos lentelę. Pavyzdžiui, padauginę iš kairėsiš i, randame, kad iijk = −i. Kadangi ii = −1, gauname −jk = −i arba jk = i.Tai sutampa su kvaternionų H daugybos 3.2 lentelės įrašu. Gautą rezultatą pa-dauginę iš j, randame −k = ji, t.y. ji = −k. Taip skaičiuodami užpildome visąkvaternionų daugybos lentelę.
Palyginę apskaičiuotąją ir Cl0,2 algebros 3.2 lentelę, matome, kad tris me-namus kvaterniono vienetus sutapatinus su baziniais Cl0,2 algebros vektoriaisi ≡ e1, j ≡ e2 ir k ≡ e12, abi lentelės visiškai sutampa. Pavyzdžiui, trijų me-namųjų vienetų sandauga ijk = −1 ir panaši sandauga, bet išreikšta per Cl0,2algebros bazinius elementus, duoda tą patį rezultatą:
e1e2e12 = e1e2e1e2 = −e1e2e2e1 = −e1(−1)e1 = −(−1)(−1) = −1.(3.70)
Iš čia išplaukia, kad Cl0,2 ir H algebros yra izomorfiškos2, t. y. Cl0,2 ∼= H.
2Atidesnis skaitytojas pastebės, kad ne viskas čia simetriška. Geometrinės algebros požiūriukvarternioninė bazė (menamieji vienetai) yra sudaryta iš skirtingo rango geometrinių objektų —vektorių ir bivektorių. Tol, kol elementus tik dauginame ir sudedame, jokių sunkumų neiškyla.Tačiau paminėtą panašumą mėginant išplėsti į analizę, reikia būti itin budriems. Pavyzdžiui, Cl0,2algebros diferencialinis operatorius, užrašytas per bazinius vektorius, turi pavidalą ∇ = e1∂x +e2∂y , tuo tarpu kvaternioninėje bazėje jis užrašomas taip: ∇ = i∂x + j∂y + k∂z .

50 3 skyrius
Bendro pavidalo kvaternionas užrašomas taip:
q = q0 + iq1 + jq2 + kq3 = q0 + q , KVATERNIONAS (3.71)
kur q0, q1, q2 ir q3 yra realūs skaičiai (projekcijos R4 erdvėje). q0 vadinamasskaliarine (realiąja) kvaterniono dalimi, q0 = Sc(q), o q = iq1 + jq2 + kq3— menamąja dalimi. Pastaroji dar vadinama ir vektorine kvaterniono dalimi,q = Vec(q). Kai kada kvarternioną užrašo tiesiog kaip simbolių kvartetą q =[q0, q1, q2, q3] ≡ [q0, q] = Sc(q) + Vec(q).
Kaip ir kiekvienos algebros elementus, kvaternionus galima sumuoti ir dau-ginti. Jiems galioja tos pačios geometrinės algebros aksiomos (2.1), (2.2) ir (2.5).Kvaternionus sumuojant atskirai sudedamos jų skaliarinės ir menamosios dalys.Pavyzdžiui, prie q kvaterniono (3.71) pridėję kvaternioną p = p0 + ip1 + jp2 +kp3 = p0 + p, gauname
q+p = (q0+p0)+i(q1+p1)+j(q2+p2)+k(q3+p3) = (q0+p0)+(q+p). (3.72)
Du kvaternionai q ir p lygūs tik tada, kai tarpusavyje lygios visos jų dalys: q0 =p0, q1 = p1, q2 = p2 ir q3 = p3. Tokių kvaternionų skirtumas duoda nulinįkvaternioną. Taigi, viena kvarternionė lygtis atstoja keturias paprastas lygtis.
Dviejų kvaternionų sandaugą apskaičiuosime pasinaudoję 3.2 lentele:
qp = (q0p0 − q1p1 − q2p2 − q3p3) + i(q0p1 + q1p0 + q2p3 − q3p2)
+ j(q0p2 + q2p0 + q3p1 − q1p3) + k(q0p3 + q3p0 + q1p2 − q2p1).(3.73)
Formulės sandara rodo, kad dviejų kvaternionų sandauga3 taip pat yra kvaternio-nas. Panaudoję vektorių skaliarinę ir vektorinę sandaugas, atsakymą užrašysimekompaktiškiau. Nenorėdami kvaternionų vektorinių dalių skaliarinės sandaugossupainioti su multivektorių vidine sandauga, ją toliau žymėsime apskritimėliu ,
qp = (q0p0 − q p) + (q0p + qp0 + q × p). (3.74)
Pirmieji skliaustai formulėje žymi skaliarinę, o antrieji — vektorinę kvaternionodalį. Per sandus išskleistos skaliarinė ir vektorinė sandaugos atrodo taip:
q p = q1p1 + q2p2 + q3p3 , (3.75a)
q × p = i(q2p3 − q3p2) + j(q3p1 − q1p3) + k(q1p2 − q2p1)
= i
∣∣∣∣∣q2 q3p2 p3
∣∣∣∣∣+ j
∣∣∣∣∣q3 q1p3 p1
∣∣∣∣∣+ k
∣∣∣∣∣q1 q2p1 p2
∣∣∣∣∣ , (3.75b)
3Kompiuterinės algebros sistemos, tokios kaip Mathematica ar Maple, gali atlikti pagrin-dinius veiksmus su kvaternionais, todėl argumentus, kad su kvaternionais skaičiuoti sudėtinga,galima laikyti pasenusiais.

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 51
kur paskutinėje eilutėje vektorinę sandaugą užrašėme matricų determinantais.Kai kvaternionų skaliarinės dalys lygios nuliui, q0 = 0 ir p0 = 0, iš (3.74) lygtiesmatome, kad vektorių skaliarinę ir vektorinę sandaugas per kvaternionus galimaužrašyti taip:
q p = −qp + pq
2, q × p =
qp− pq
2. (3.76)
Menamosios (vektorinės) dalies kvadratas yra neigiamas skaičius,
q2 ≡ qq = −(q21 + q22 + q23) . (3.77)
Bendru atveju qp 6= pq, tačiau jei bent vienas iš daugiklių yra skaliaras, pavyz-džiui, p = p0, tada qp0 = p0q.
Apibrėšime kompleksiškai jungtinį kvaternioną, kurį žymėsime žvaigždute:
q∗ = q0 − iq1 − jq2 − kq3 = q0 − q . (3.78)
Nesunku patikrinti, kad kvaternionų kompleksinio jungtinumo operacija pasižy-mi savybėmis
(q∗)∗ = q, (p+ q)∗ = p∗ + q∗, (pq)∗ = q∗p∗ . (3.79)
Atkreipkite dėmesį į paskutinę formulę. Nuo panašios įprastinių komutatyviųkompleksinių skaičių savybės ji skiriasi sukeista daugiklių tvarka. Kaip ir komp-leksiniams skaičiams, kvaterniono normos |q| kvadratas apibrėžiamas kaip kva-terniono ir jam kompleksiškai jungtinio kvaterniono sandauga
|q|2 = qq∗ = q∗q = q20 + q21 + q22 + q23 = q20 + |q|2 ≥ 0. (3.80)
Nesunku įsitikinti, kad |q∗| = |q|, |pq| = |p||q|. Kaip ir kompleksiniams skai-čiams, skaliarinę (realiąją) ir vektorinę (menamąją) dalį išskirsime prie kvater-niono pridėję ar atėmę jungtinį kvaternioną: Sc(q) = (q + q∗)/2 ir Vec(q) =(q − q∗)/2.
Beliko užrašyti atvirkštinio kvaterniono q−1 išraišką:
q−1 =q∗
|q|2 =q0 − q
q20 + |q|2 . (3.81)
Jos teisingumunesunku įsitikintisudauginusabu kvaternionusq−1q = qq−1 = 1.Sandaugos atvirkštinis kvaternionas tenkina savybę (pq)−1 = q−1p−1. Neko-mutatyvinėje algebroje užrašas p/q, apskritai kalbant, yra nevienareikšmis, todėlvietoje jo rašoma pq−1 arba q−1p, priklausomai nuo to, iš kurios pusės iš at-virkštinio elemento dauginame. Kvaternionas, kurio norma lygi vienetui |q| = 1,vadinamas vienetiniu. Iš (3.81) formulės išplaukia, kad vienetinio kvaternionoatvirkštinis yra jam jungtinis kvaternionas q−1 = q∗. Priedo 352 puslapyje pa-teikta svarbiausių kvaternionų savybių lentelė.

52 3 skyrius
3.3 pavyzdys. Paimkime kvaternioną
q1 = 2 + i + j3− k4. (3.82)
Jam kompleksiškai jungtinis kvaternionas yra
q∗1 = 2− i− j3 + k4. (3.83)
Šio kvaterniono modulio kvadratas yra realusis skaičius:
|q1|2 = 22 + 12 + 32 + 42 = 30. (3.84)
Atvirkštinis (3.82) kvaternionui yra
q−11 = q∗1
/|q1|2 = 1
30(2− i− j3 + k4). (3.85)
Pasinaudoję kvaternionų daugybos lentele 3.2, įsitikiname, kad q1q−11 = 1,
(2 + i + j3− k4)1
30(2− i− j3 + k4) =
1
30
Ü4− i2− j6 + k8+i2 + 1− k3− j4+j6 + k3 + 9 + i12−k8 + j4− i12 + 16
ê
=1
30(30) = 1.
(3.86)
3.4 pavyzdys. Paimkime kitą kvaternioną
q2 = 3− i2 + j + k5 . (3.87)
Tada pirmojo ir antrojo kvaternionų suma ir skirtumas yra
q1 + q2 = 5− i + j4 + k , q1 − q2 = −1 + i3 + j2− k9 , (3.88)
o jų sandauga
q1q2 =(2 + i + j3− k4)(3− i2 + j + k5) =
Ü6− i4 + j2 + k10+i3 + 2 + k− j5+j9 + k6− 3 + i15−k12 + j8 + i4 + 20
ê
=25 + i18 + j14 + k5.
(3.89)
Daugiklius sukeitę vietomis, gauname kitą kvaternioną, q2q1 = 25− i20+ j8− k9.
3.9.1. Kvaternionų vaizdavimasmatricomis. Kvaternionusgalima atvaiz-duoti realiosiomis 4× 4 matricomis. Štai kaip atrodo tokia matrica:
q =
q0 −q1 −q2 −q3q1 q0 −q3 q2q2 q3 q0 −q1q3 −q2 q1 q0
, (3.90)

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 53
kur matricos elementai yra (3.71) formulės projekcijos. Šio pavidalo matricųalgebra sutampa su kvaternionų algebra. Iš (3.90) matricos lengva gauti kvater-nioninius generatorius, t. y. bazinius elementus 1, i, j ir k. Tuo tikslu vieną iš qiprilyginame vienetui, o likusius — nuliui. Deja, dauginant matricas atliekamakur kas daugiau veiksmų, nei tiesiogiai naudojant kvaternionų daugybos formulę(3.73), todėl spartiems skaičiavimams matricinis vaizdavimas netinka.
Kvaternionus taip pat galima atvaizduoti 2× 2 kompleksinėmis matricomis.Jei įvesime pažymėjimus α = q0 + iq1 ir β = q2 + iq3, tai kompleksine matricaužrašytas bendras kvaternionas atrodys taip:
q =
ñα β
−β∗ α∗
ô. (3.91)
Prilyginę vieną iš qi vienetui, o kitus nuliui, iš (3.91) rasime kvaternionų algebrosgeneratorius matriciniame atvaizde:
ñ1 00 1
ô,
ñi 00 −i
ô,
ñ0 1−1 0
ô,
ñ0 ii 0
ô. (3.92)
Jei paskutines tris matricas padauginsime iš −i, pamatysime, kad jos sutampa sukvantinėje mechanikoje gerai žinomomis Paulio matricomis σz , σy ir σx. Pasta-rosios naudojamos 1/2 sukinį turinčioms dalelėms aprašyti, todėl nieko nuosta-baus, kad kvaternionai taikomi kvantinėje mechanikoje. Kvaternionų poalgebriaidažnai sutinkami didesnėse Cliffordo algebrose.
3.9.2. Bikvaternionai. Bikvaternionas arba kompleksiniskvaternionas gau-namas kvaternione q = q0 + iq1+ jq2 +kq3 koeficientus q0, q1, q2 ir q3 pakeituskompleksiniais skaičiais. Kad algebra išliktų uždara, įprastinis menamas viene-tas, kurį, skirtingai negu visur kitur, šiame poskyryje žymėsime pasvirusiu sim-boliu i =
√−1, turi komutuoti su kvaternioniniais ortais i, j ir k,
ii = ii, ij = ji, ik = ki. (3.93)
Todėl kompleksinį kvaternioną qc galima suskaidyti į dvi dalis:
qc = Re(qc) + i Im(qc). (3.94)
Kompleksinių kvaternionų algebra žymima H(C) arba ClC0,2. Geometrinės al-gebros požiūriu kompleksiniai kvaternionai nėra būtini, tačiau fizikoje jie vis darnaudojami. Galima parodyti, kad bikvaternionų algebra izomorfiška Cl3,0 algeb-rai, kurią aptarsime kitame skyriuje.

54 3 skyrius
3.10. Cl1,1 algebra
Cl1,1 1 e1 e2 e121 1 e1 e2 e12e1 e1 1 e12 e2e2 e2 −e12 −1 e1e12 e12 −e2 −e1 1
3.3 lentelė. Cl1,1 algebros daugy-bos lentelė
Ši algebra yra gimininga Cl2,0 ir Cl0,2algebroms. Jos signatūra yra mišri: vienoiš bazinių vektorių kvadratas yra teigiamasskaičius, o kito — neigiamas,
e21 = 1, e22 = −1. (3.95)
Kaip ir anksčiau aptartose algebrose, ba-ziniai vektoriai antikomutuoja ((3.63) for-mulė). Taigi, Cl1,1 algebrą irgi sudaro ke-
turi baziniai elementai 1, e1, e2, e12. Pasinaudoję bazinių vektorių savybėmis,sukonstruojame šios algebros 3.3 daugybos lentelę.
Algebroje su mišria signatūra nenulinių vektorių kvadratai gali virsti nu-liais. To negalėjo būti vienos signatūros algebrose. Pavyzdžiui, vektoriaus a =(a1e1 + a2e2) kvadratas yra skaliaras:
a2 = (a1e1+a2e2)2 = a21e
21+a
22e
22+a1a2(e1e2+e2e1) = a21−a22. (3.96)
Todėl vektoriaus, kurio projekcijų dydžiai sutampa, a1 = a2, kvadratas bus ly-gus nuliui. Kaip matysim, šia savybe pasinaudojama konstruojant reliatyvumoteoriją. Jei skaliarui a1 suteiksime koordinatės, a1 = x, o skaliarui a2 laiko,padauginto iš šviesos greičio c, prasmę, a2 = ct, tai sąlyga a2 = 0 yra ne kaskita, kaip reliatyvumo teorijos invariantinio intervalo x2 − c2t2 = 0, iš kurioišplaukia šviesos greičio pastovumas, apibrėžimas. Todėl geometrinės algebrosCl1,1 plokštumą, kurią sudaro vienintelis koordinatinis vektorius e1 ir laiko vek-torius e2, būtų galima pavadinti Minkowskio plokštuma. Netrukus matysime,kad keturmatį reliatyvistinį erdvėlaikį nusako panaši, tik platesnė algebra Cl1,3su maišyta signatūra. Jos pirmasis teigiamos signatūros bazininis vektorius nu-sako laiką, o trys neigiamos signatūros vektoriai — koordinates.
Iš 3.3 daugybos lentelės matome, kad Cl1,1 algebros bivektoriaus e12 kvad-ratas yra teigiamas skaičius, e212 = +1. Priminsime, kad tiek Cl0,2, tiek ir Cl2,0algebrose bivektorių kvadratai buvo neigiami. Dėl skirtingo ženklo bivektoriauseksponentė ee12ϕ dabar išsiskleidžia ne per trigonometrines, o per hiperbolinesfunkcijas:
e±e12ϕ = chϕ± e12 shϕ. (3.97)
Formulės teisingumu galima įsitikinti užrašius eksponentės funkciją eilute ir pri-taikius bivektoriaus kėlimo laipsniu taisyklę: (e12)
n = 1, kai n yra lyginis, ir(e12)
n = e12, jei n yra nelyginis. Kaip ir anksčiau, tokią apibendrintą ekspo-nentę vadinsime rotoriumi. Reliatyvumo teorijoje ji vadinama Lorentzo stūmiu

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 55
a) b) c)3.5 pav. a) Koordinatinis tinklelis prieš pasukimą ir b),c) po pasukimo kampuϕ = π/8. b) Euklidinėje plokštumoje (Cl2,0 algebra) ir c) Minkowskio plokš-tumoje (Cl1,1 algebra)
(angl. Lorentz boost),
R(ϕ) = ee12ϕ, e212 = 1 . Cl1,1 ROTORIUS (3.98)
3.5 pavyzdys. Paimkime bazinį vektoriųe1 ir pasukime jį plokštumojee12 kampu 2ϕ,
e′1 = ee12ϕe1e−e12ϕ = (chϕ+ e12 shϕ)e1(chϕ − e12 shϕ)
= (ch2ϕ+ sh2ϕ)e1 − (shϕ chϕ + chϕ shϕ)e2 (3.99)
= ch(2ϕ) e1 − sh(2ϕ) e2.
Panašiai apskaičiuojamas ir vektoriaus e2 pasukimas:
e′2 = ee12ϕe2e−e12ϕ = − sh 2ϕe1 + ch 2ϕe2. (3.100)
Bazinių vektorių kvadratai po pasukimo nepasikeičia: e21 = (e′1)2 =
(ch 2ϕe1 −
sh 2ϕe2)2
= 1 ir e22 = (e′2)2 =
(− sh 2ϕe1 + ch 2ϕe2
)2= −1.
3.6 pavyzdys. Matricinis vaizdavimas. Įvedus koordinates (x, y) bei (x′, y′), formu-les (3.99) ir (3.100) nesunku perrašyti matriciniu pavidalu (palyginkite su (3.51) išraiš-ka): ï
x′
y′
ò=
ïch 2ϕ − sh 2ϕ− sh 2ϕ ch 2ϕ
ò ïxy
ò. (3.101)
3.5 paveiksle pavaizduota, kaip keičiasi koordinatinis tinklelis, atlikus pasu-kimą euklidinėje (Cl2,0 algebra, (3.51) formulė) ir Minkowskio (Cl1,1 algebra,(3.101) formulė) plokštumose. Euklidinėje plokštumoje, kaip visi puikiai žino-me, tinklelis pasisuka kampu 2ϕ. Tuo tarpu Minkowskio plokštumoje sukimastinklelį deformuoja. Skaitytojas nesunkiai patikrins, kad e′1 ∧ e′2 = e1 ∧ e2, t. y.elementaraus ploto orientacija ir dydis po pasukimo nepasikeitė, nors stačiakam-piai, kaip matyti, virto lygiagretainiais.

56 3 skyrius
3.11. Bazės vaizdavimas matricomis
Visų geometrinių algebrų bazinius elementus galima atvaizduoti matricomis.Nors iš pirmo žvilgsniomatricinis vaizdavimasgali pasirodyti ekvivalentus įpras-tiniam geometriniam, tačiau taip nėra. Matriciniame vaizdavime dingsta vekto-rinės erdvės elementų — vektorių, nuo kurių pradėjome konstruoti visas geo-metrines algebras, išskirtinumas. Kitaip tariant, pažvelgę į užrašytą matricą mesnegalime iš karto pasakyti, ką ji geometriškai vaizduoja — bazinį vektorių arbazinį bivektorių. Taigi, matricinis užrašymas tik iš dalies atspindi geometrinėsalgebros struktūrą, todėl, bendrai kalbant, nėra vienareikšmis. Be to, matricinisvaizdavimas savo esme yra koordinatinis, todėl „neša“ perteklinę, niekam nerei-kalingą informaciją. Pasitelkus geometrinę algebrą, dažnai pavyksta paprastaiužrašyti funkcinius ryšius tarp vektorinių, bivektorinių ir kitokio rango kintamų-jų, tuo tarpu matricomis juos išreikšti nėra lengva. Nepaisant to, su geometrinėsalgebros elementų matriciniais atvaizdžiais susipažinti verta, nes jie padeda su-prasti ryšį tarp senosios ir šioje knygoje mokomos naujos XXI a. matematikos.
3.11.1. Kompleksinių skaičių vaizdavimas matricomis. Kompleksiniųskaičių algebra Cl0,1 turi du bazinius elementus 1, e1. Vienintelis vektoriustenkina sąlygą e21 = −1. Kompleksinio kintamojo teorijoje e1 vadinamas me-namu vienetu i =
√−1. Cliffordo algebros požiūriu e21 = −1 yra vektorinės
erdvės elemento, o ne kvadratinės šaknies savybė. Paminėtus bazinius elemen-tus atitinka, pavyzdžiui, tokios 2× 2 realių skaičių matricos:
1 =
ñ1 00 1
ô, i =
ñ0 1−1 0
ô, (3.102)
kurių kvadratas yra teigiama ir neigiama vienetinė matrica. Jas interpretuojamekaip +1 ir −1. Bet kokį kompleksinį ir jam jungtinį skaičių matricomis galimeatvaizduoti taip:
z = a + ib = a
ñ1 00 1
ô+ b
ñ0 1−1 0
ô=
ña b−b a
ô, z∗ = a− ib =
ña −bb a
ô.
(3.103)
Dauginant ir sudedant matricas galima atlikti visus algebrinius veiksmus, pavyz-džiui, apskaičiuoti modulį zz∗,
zz∗ =
ña b−b a
ô ña −bb a
ô=
ña2 + b2 0
0 a2 + b2
ô→ a2 + b2 . (3.104)
Taigi, vietoje kompleksinių skaičių galima naudoti matricas: diagonalinė matrica(z+z∗)/2 atitiks apskaičiavimo realiąją, o matrica (z−z∗)/2 — menamąją dalį.

Dvimatė erdvė. Cl2,0, Cl0,2 ir Cl1,1 algebros 57
Trumpa kompleksinių skaičių istorija
XVI a. Italijoje matematikai del Ferro (1465–1526) ir Tartaglia vienas nuo kitonepriklausomai surado kubinės lygties x3 = px+ q sprendinius. Ši lygtis, kaipdabar žinome, turi vieną realią ir dvi kompleksiškai jungtines šaknis. Tartagliayra pravardė, reiškianti „mikčius“, kurią matematikas gavo dar vaikystėje, kaikatedroje besislėpdamas nuo miestą užpuolusių prancūzų gavo penkis smarkiuskirčius į galvą. Tikrasis vardas, manoma, Niccolo Fontana (1500–1557). Taislaikais kompleksinio skaičiaus menamoji dalis i =
√−1 buvo traktuojama tik
kaip pagalbinė priemonė, kurią kartais tekdavo įvesti skaičiavimuose su realiaisskaičiais. Kai kurie matematikai menamojo vieneto nepripažino kaip skaičiaus.Simbolį i =
√−1 pirmą sykį panaudojo L. Euleris (1707–1783). 1740 m. jis
atrado elegantišką sąryšį eiα = cosα + i sinα. Iš pastarojo išplaukia vienagražiausių formulių, eiπ = −1, kurioje tiek pagrindas, tiek ir laipsnio rodiklisyra transcendentiniai skaičiai. Tiesa, dar 1770 m. tas pats Euleris įrodinėjo,kad
√−2
√−3 =
√6 (neteisinga). XVIII a. pabaigoje daugelis matemati-
kų pastebėjo, kad kompleksinius skaičius galima pavaizduoti plokštumoje, t. y.juos geometriškai interpretuoti. Tai buvo didelė paskata tiriant kompleksiniųfunkcijų tolydumą kompleksinėje plokštumoje. Juos vainikavo analizinės funk-cijos sąvoka (B. Riemannas, 1828–1866) ir kompleksinės funkcijos išvestinėsįvedimas. Nuo XIX a. pabaigos kompleksinės funkcijos tapo integralia teori-nės fizikos dalimi. Kompleksinės funkcijos leidžia labai kompaktiškai užrašytifizikinius dėsnius, pavyzdžiui, banginės funkcijos evoliuciją Schrödingerio lyg-tyje. Kompleksinių amplitudžių metodas plačiai naudojamas elektrotechnikoje,radiotechnikoje, akustikoje ir visur, kur harmoninio virpesio amplitudė ir fa-zė vaizduojami vienu kompleksiniu skaičiumi. Geometrinės algebros požiūriukompleksiniai skaičiai yra Cl0,1 algebros elementai.
3.11.2. Cl2,0 vaizdavimasmatricomis. Cl2,0 algebros daugybos lentelė ne-pasikeis, jei vietoje bazinių vektorių paimsime, pavyzdžiui, tokias 2×2 matricas:
e1 =
ñ1 00 −1
ô, e2 =
ñ0 11 0
ô. (3.105)
Šių matricų kvadratai duoda vienetinę matricą, kuri ir atstoja vienetinį skaliarą.Jei matricas sudauginsime, gausime bivekoriaus e12 matricinį atvaizdą:
1 =
ñ1 00 1
ô, e12 =
ñ0 1−1 0
ô. (3.106)
Sudauginę bazinių vektorių matricas įsitikiname, kad e2e1 = −e1e2, t. y. kaip irturi būti, bazinius vektorius vaizduojančios matricos antikomutuoja. Iš bazinių

58 3 skyrius
elementų matricinių atvaizdų išplaukia, kad bendriausias Cl2,0 algebros multi-vektoriaus matricinis pavidalas yra
a0 + a1e1 + a2e2 + a3e12 =
ña0 + a1 a2 + a3a2 − a3 a0 − a1
ô. (3.107)
Tačiau galima surasti ir kitokias bazinių elementų matricas, kurių Cl2,0 algebrosdaugybos lentelė bus ta pati. Pavyzdžiui, pasinaudojus (3.105) matricomis ne-sunku patikrinti, kad e1 ir e2 pakeitę matricomis e′1 =
√2e1 + e12 ir e′2 = e2,
gauname (e′1)2 = 1, (e′2)
2 = 1 ir e′1e′2 = −e′2e
′1. Taigi, šios matricos taip pat
tenkina bazinių Cl2,0 algebros elementų savybes. Todėl galima teigti, kad algeb-rą atvaizdavus matricomis nebeliko išskirtinio vektorinio poerdvio4, nuo kuriopradėję ir konstravome kitų rangų geometrinės algebros elementus.
3.11.3. Cl0,2 vaizdavimas matricomis. Kadangi Cl0,2 algebra yra izomor-fiška kvaternionų algebrai, tai ją galima vaizduoti tomis pačiomis kvaternionųmatricų (3.90)–(3.92) formulėmis. Atkreipkite dėmesį, kad dabar 2×2 matricosyra kompleksinės. Jei Cl0,2 algebrą norime pavaizduoti realiomis matricomis, jųdydis turi būti du kartus didesnis, t. y. turime naudoti 4× 4 matricas (3.90).
3.11.4. Cl1,1 vaizdavimas matricomis. Šios algebros bazinius elementusvaizduoja matricos
1 =
ñ1 00 1
ô, e1 =
ñ1 00 −1
ô, e2 =
ñ0 1−1 0
ô, e12 =
ñ0 11 0
ô. (3.108)
Iš jų pavidalo išplaukia, kad bendriausias Cl1,1 algebros multivektorius yra
a0 + a1e1 + a2e2 + a3e12 =
ña0 + a1 a2 + a3−a2 + a3 a0 − a1
ô. (3.109)
Turėdami matricinius atvaizdus, formules, užrašytas Cliffordo multivektoriams,galima užrašyti matricomis. Matricų sandauga atitinka geometrinę sandaugą.Nors kai kada matriciniai atvaizdai yra patogūs, kaip matėme, atitikimas nėravienareikšmis, o tai kartais sukelia problemų. Bet blogiausia, kad formules užra-šius matricomis prarandama formulės rangų struktūra, kuri ir sudaro spartaus beiefektyvaus skaičiavimo pagrindą ir kuria remiasi geometrinė algebros elementųinterpretacija.
4Užrašytas pakeitimas yra visos Cliffordo erdvės tiesinė transformacija, kurios metu sumaišo-mi vektorių ir bivektorių poerdviai. Po tokios transformacijos galima apibrėžti naują bazinę vekto-rinę erdvę e′
1,e′1, nuo kurios vėl galime pradėti konstruoti aukštesnių rangų elementus. Tačiau
naujosios ir senosios bazinės vektorinės erdvės elementų rangai niekaip nesusiję. Taigi, elementųskirstymas į rangus galimas tik susitarus, ką laikome pradinės vektorinės erdvės vektoriais.

4. Trimatė erdvė. Cl3,0 algebra
Išsiaiškinome, kokias geometrines algebras galima apibrėžti dvimatėje erd-vėje (plokštumoje). Tačiau fizikiniai reiškiniai vyksta ne dvimatėje, o trima-tėje erdvėje. Čia susipažinsime su viena iš trimačių algebrų, būtent euklidineCl3,0 algebra, kurią naudodami kituose skyriuose aprašysime klasikinę mechani-ką, elektrodinamiką ir net kvantinį elektrono sukinį.
4.1. Cl3,0 bazė
Kaip ir anksčiau pradėsime nuo vektorinės bazinės erdvės, iš kurios konst-ruosime visus likusius bazinius Cl3,0 algebros elementus. Trimatės vektorinėserdvės bazę sudaro trys vektoriai e1, e2, e3, tenkinantys tuos pačius antiko-mutacinius sąryšius kaip ir dvimatėje erdvėje,
eiej + ejei = 2δij, i, j = 1, 2, 3 . (4.1)
Iš jų išplaukia bazinių vektorių normavimo e21 = e22 = e23 = 1 sąlyga ir teigiamaCl3,0 algebros signatūra (+++). Iš (4.1) formulės taip pat matosi, kad baziniaivektoriai yra ortogonalūs, t. y. ei·ej = 0, kai i 6= j, todėl jų geometrinė sandaugasutampa su išorine eiej = ei ∧ ej = −ej ∧ ei = −ejei. Tai reiškia, kaddaugindami bazinius vektorius galime gauti tik tris nepriklausomus bivektorius,būtent, e1 ∧ e2, e2 ∧ e3 ir e3 ∧ e1. Visų šių bivektorių kvadratai neigiami,
(e1 ∧ e2)2 = (e2 ∧ e3)
2 = (e3 ∧ e1)2 = −1 . (4.2)
Trimatėje erdvėje pasirodo naujas bazinis elementas — trivektorius. Jis va-dinamas pseudoskaliaru ir žymimas I = e1 ∧ e2 ∧ e3. Pseudoskaliaro kvadratasirgi neigiamas:
I2 = (e1 ∧ e2 ∧ e3)2 = (e1 ∧ e2 ∧ e3)(e1 ∧ e2 ∧ e3)
= e1e2e3e1e2e3 = e1e2(e3e3)e1e2 = e1e2e1e2
= −e1(e2e2)e1 = −e1e1 = −1 .
(4.3)
Jei baziniai algebros bivektoriai vaizduoja orientuotas plokštumas, tai bazinis tri-vektorius (pseudoskaliaras) vaizduoja vienetinį orientuotą tūrį. Todėl aukštesnio
59

60 4 skyrius
Cl3,0 1 e1 e2 e3 e12 e23 e31 I1 1 e1 e2 e3 e12 e23 e31 Ie1 e1 1 e12 −e31 e2 I −e3 e23e2 e2 −e12 1 e23 −e1 e3 I e31e3 e3 e31 −e23 1 I −e2 e1 e12e12 e12 −e2 e1 I −1 −e31 e23 −e3e23 e23 I −e3 e2 e31 −1 −e12 −e1e31 e31 e3 I −e1 −e23 e12 −1 −e2I I e23 e31 e12 −e3 −e1 −e2 −1
4.1 lentelė. Cl3,0 algebros daugybos lentelė, I = e123
už trivektorių rango elementų trimatėje erdvėje jau nėra. Taigi, Cl3,0 algebrosbazę sudaro šie 23 = 8 elementai:¶
1, e1, e2, e3, e12, e23, e31, I = e123©.
1 skaliaras 3 vektoriai 3 bivektoriai 1 pseudoskliaras(4.4)
Pateiktos formulės leidžia sudaryti Cl3,0 algebros daugybos lentelę 4.1. Iš jos ma-tome, kad šioje algebroje yra net keturi menami vienetai, būtent, e12, e23, e32 irI , kurių kvadratai duoda −1. Tai įsidėmėję, daugybos lentelę lengvai įsiminsite,mintyse bazinių elementų indeksus sandaugose skaičiuodami, pavyzdžiui, tokiubūdu: Ie12 → (123)12 → (12)(12)3 → (−3) → −e3. Palyginę 4.1 lente-lės apatinę eilute su paskutiniu stulpeliu matome, kad jie sutampa. Tai reiškia,kad pseudoskaliaras I komutuoja su visais Cl3,0 algebros baziniais elementais,Iei = eiI ir Ieij = eijI . Šia savybe patogu naudotis skaičiavimuose, tačiau jibūdinga tik toms algebroms, kurių vektorinės erdvės dimensija nelyginė.
4.2. Veiksmai su baziniais elementais
Pats bendriausias Cl3,0 algebros multivektorius yra skaliaro α, vektoriausa = a1e1 + a2e2+ a3e3, bivektoriaus B = b12e12 + b23e23 + b31e31 ir pseudo-skaliaro T = ζ e123 suma
M = α + a+ B + T . (4.5)
Kaip ir anksčiau, sumuojant multivektorius atskirai sudedami skaliarai, vektoriai,bivektoriai ir pseudoskaliarai. Skirtingų rangų elementams suma tėra sujungimoįvieną objektą simbolis. Pavyzdžiui, jei turime du multivektoriusM1 = 3+2e1−e2+7e12+2e123 irM2 = 6+3e2−e3+e12+e23−e123, sudėję juos gaunamenaują multivektoriųM =M1+M2 = 9+2e1+2e2−e3 +8e12+e23+e123.
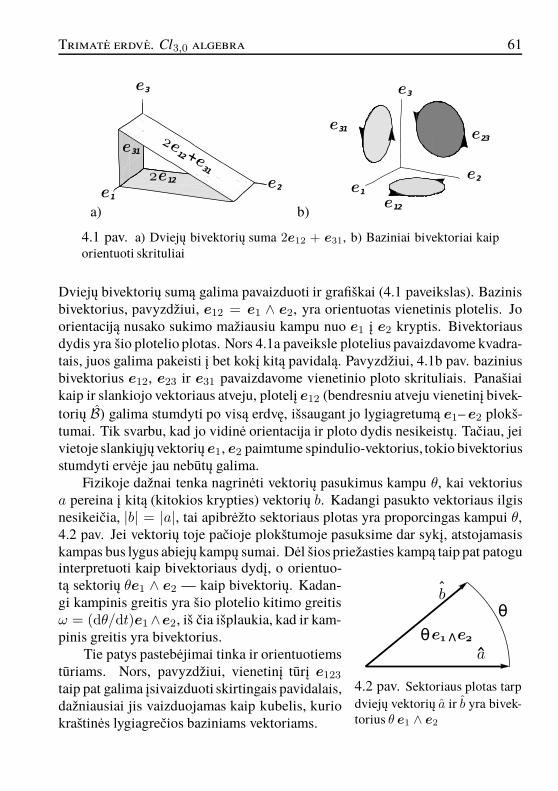
Trimatė erdvė. Cl3,0 algebra 61
a) b)
4.1 pav. a) Dviejų bivektorių suma 2e12 + e31, b) Baziniai bivektoriai kaiporientuoti skrituliai
Dviejų bivektorių sumą galima pavaizduoti ir grafiškai (4.1 paveikslas). Bazinisbivektorius, pavyzdžiui, e12 = e1 ∧ e2, yra orientuotas vienetinis plotelis. Joorientaciją nusako sukimo mažiausiu kampu nuo e1 į e2 kryptis. Bivektoriausdydis yra šio plotelio plotas. Nors 4.1a paveiksle plotelius pavaizdavome kvadra-tais, juos galima pakeisti į bet kokį kitą pavidalą. Pavyzdžiui, 4.1b pav. baziniusbivektorius e12, e23 ir e31 pavaizdavome vienetinio ploto skrituliais. Panašiaikaip ir slankiojo vektoriaus atveju, plotelį e12 (bendresniu atveju vienetinį bivek-torių B) galima stumdyti po visą erdvę, išsaugant jo lygiagretumą e1– e2 plokš-tumai. Tik svarbu, kad jo vidinė orientacija ir ploto dydis nesikeistų. Tačiau, jeivietoje slankiųjųvektoriųe1, e2 paimtume spindulio-vektorius, tokio bivektoriusstumdyti ervėje jau nebūtų galima.
Fizikoje dažnai tenka nagrinėti vektorių pasukimus kampu θ, kai vektoriusa pereina į kitą (kitokios krypties) vektorių b. Kadangi pasukto vektoriaus ilgisnesikeičia, |b| = |a|, tai apibrėžto sektoriaus plotas yra proporcingas kampui θ,4.2 pav. Jei vektorių toje pačioje plokštumoje pasuksime dar sykį, atstojamasiskampas bus lygus abiejų kampų sumai. Dėl šios priežasties kampą taip pat patogu
4.2 pav. Sektoriaus plotas tarpdviejų vektorių a ir b yra bivek-torius θ e1 ∧ e2
interpretuoti kaip bivektoriaus dydį, o orientuo-tą sektorių θe1 ∧ e2 — kaip bivektorių. Kadan-gi kampinis greitis yra šio plotelio kitimo greitisω = (dθ/dt)e1∧e2, iš čia išplaukia, kad ir kam-pinis greitis yra bivektorius.
Tie patys pastebėjimai tinka ir orientuotiemstūriams. Nors, pavyzdžiui, vienetinį tūrį e123taip pat galima įsivaizduoti skirtingais pavidalais,dažniausiai jis vaizduojamas kaip kubelis, kuriokraštinės lygiagrečios baziniams vektoriams.

62 4 skyrius
4.2.1. Dviejų vektorių sandauga. Aksialinis vektorius. Paimkime du vek-torius
a = a1e1 + a2e2 + a3e3 , b = b1e1 + b2e2 + b3e3 (4.6)
ir apskaičiuokime jų geometrinę sandaugą. Nesunku matyti, kad daugindamiskirtingusbazinius vektorius gausime bivektoriųeiej , o daugindami vienodus—skaliarą eiei. Todėl sandaugos rezultatas, kaip ir dvimačiu atveju, bus skaliaroir bivektoriaus suma
ab = a · b+ a ∧ b GEOMETRINĖVEKTORIŲ SANDAUGA
(4.7)
kur
a · b = a1b1 + a2b2 + a3b3, (4.8a)
a ∧ b = (a1b2 − a2b1)e12 + (a2b3 − a3b2)e23 + (a3b1 − a1b3)e31 . (4.8b)
Pirmoji iš sandaugų yra simetrinė, o antroji antisimetrinė, todėl jas galime iš-reikšti per geometrines sandaugas:
a · b = 12(ab+ ba), (4.9a)
a ∧ b = 12(ab− ba). (4.9b)
Įsižiūrėję į (4.8b) formulės koeficientus prie bazinių bivektorių matome, kadjie panašūs į dviejų įprastų vektorių a = a1i+a2j+a3k ir b = b1i+b2j+b3k,kur i, j, k — komutuojantys ortai, vektorinės sandaugos sandų koeficientus:
a× b = (a1b2 − a2b1)k + (a2b3 − a3b2)i+ (a3b1 − a1b3)j . (4.10)
Jei i, j, k pakeistume į e1, e2, e3, pastarąją formulę galėtume perrašyti taip:
a×b = −e123î(a1b2−a2b1)e12+(a2b3−a3b2)e23+(a3b1−a1b3)e31
ó. (4.11)
Palyginę ją su (4.9b) išraiška, randame sąryšį tarp vektorinės ir išorinės sandaugų:
a×b = −Ia∧b = −I(a∧b) = (a∧b)I−1 ≡ ⋆(a∧b), kur I = e123 . (4.12)
Taigi, visiems gerai žinomoje vektorinės sandaugos formulėje (4.10) yra pasislė-pęs bivektorius, kitaip tariant, orientuotaplokštuma. Sandaugaa×b tradiciniamevektoriniame skaičiavime vadinama aksialiniu vektoriumi. Tačiau jis nėra tikrasvektorius. Tikrieji arba poliniai vektoriai yra, pavyzdžiui, fizinio kūno greitis,elektrinis laukas ar judesio kiekis. Tuo tarpu kampinis greitis, magnetinis laukasir judesio kiekio momentas yra aksialiniai vektoriai. Norint atskirti aksialinį vek-torių nuo polinio, reikia atlikti koordinačių sistemos inversiją, t.y. pakeisti i, j irk kryptis į priešingas. Po tokios transformacijos aksialiniai vektoriai ženklo ne-pakeičia, tuo tarpu tikrieji poliniai, natūralu, keičia. Tai matyti iš formulių (4.6)

Trimatė erdvė. Cl3,0 algebra 63
ir (4.10). Knygose mokoma, kad vektorinis skaičiavimas yra neprieštaringas be-koordinatinis skaičiavimas, tačiau dažniausiai nutylima, kad turime dviejų rūšiųvektorius, kuriuos žymime tokiomis pačiomis raidėmis, o grafiškai — vienasnuo kito nesiskiriančiomis strėlėmis. Pavyzdžiui, tiek elektrinis, tiek ir magneti-nis laukas vadovėliuose braižomi vienodai, todėl nieko nuostabaus, kad studentaiabiejų rūšių vektorius painioja. Geometrinė algebra čia įneša visišką aiškumą.Ji teigia, kad yra tik vienos rūšies vektoriai, o (4.11) formulė rodo, kad aksiali-nis vektorius yra ne kas kita, kaip bivektorius, — orientuota ploštuma, kuriojevyksta sukimasis. Ši plokštuma vektoriniame skaičiavime vaizduojama statmenujai vektoriumi, kurio ilgis proporcingas plokštumos plotui. Daugyba iš pseudo-skaliaro I−1 ir yra ta transformacija, kuri (4.12) formulėje bivektorių perveda įstatmeną jam vektorių. Pastaroji transformacija kai kada žymima žvaigždute ⋆prieš bivektorių ir vadinama Hodge’o dualumu. Akivaizdu, kad šis apgaulingastriukas galimas tik trimatėje Euklido erdvėje, kurioje bazinių vektorių ir baziniųbivektorių skaičius sutampa. Ir nors matematikai žino, kad dviejų vektorių vek-torinę sandaugą dar galima sukonstruoti, pavyzdžiui, septynmatėje erdvėje [8],tačiau aiškinant reliatyvumo teoriją vektorinio skaičiavimo tenka atsisakyti. Tuotarpu apibendrinti geometrinę algebrą daugiamatėms erdvėms visai nesunku. Jisėkmingai taikoma keturmatėje Minkowskio erdvėje reliatyvumo teorijai aiškinti.
4.2.2. Trijų vektorių sandauga. Apskaičiuokime trijų vektorių išorinę san-daugą a ∧ b ∧ c. Tam, be (4.6) vektorių, mums prireiks trečio vektoriaus c =c1e1 + c2e2 + c3e3. Mentes, kurių sandaugose atsiranda du ar daugiau vienodųbazinių vektorių, prilyginame nuliui. Pavyzdžiui, ei ∧ ei = 0, ei ∧ ei ∧ ej = 0,ei ∧ ej ∧ ei = 0 ir pan. Bazinių vektorių su skirtingais indeksais išorinės san-daugos duoda aukštesnio rango elementus, ei ∧ ej = eij ir (ei ∧ ej) ∧ ek =ei∧(ej∧ek) = ei∧ej∧ek = eijk. Taigi, atskleidę a∧b∧c sandaugą gauname
a ∧ b ∧ c = (a1e1 + a2e2 + a3e3) ∧ (b1e1 + b2e2 + b3e3) ∧ c
=
Ña1b1e11 + a1b2e12 + a1b3e13
+a2b1e21 + a2b2e22 + a2b3e23+a3b1e31 + a3b2e32 + a3b3e33
é∧ (c1e1 + c2e2 + c3e3)
=
Ç(a1b2 − a2b1)e12 + (a2b3 − a3b2)e23
+(a3b1 − a1b3)e31
å∧ (c1e1 + c2e2 + c3e3)
=(a1b2 − a2b1)c3e123 + (a2b3 − a3b2)c1e123 + (a3b1 − a1b3)c2e123
=î(a1b2 − a2b1)c3 + (a2b3 − a3b2)c1 + (a3b1 − a1b3)c2
óe123 .
(4.13)

64 4 skyrius
a) b)
4.3 pav. Orientuoti lygiagretainiai gretasieniai, užduoti vektoriais a = 5e1,b = 5e2 ir c = −2e2 + 4e3. a) gretasienio a ∧ b ∧ c ir b) gretasienio b ∧ a ∧ corientacijos priešingos
Paskutinę lygtį, kurioje liko tik e123, galima užrašyti determinantu
a ∧ b ∧ c =
∣∣∣∣∣∣∣
a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣∣e123 , (4.14)
kurio prasmė yra ne kas kita kaip, lygiagretainio gretasienio sudaryto iš vektoriųa, b ir c, tūris (4.3 paveikslas). Pavyzdžiui, iš vektorių a = 5e1, b = 5e2 irc = −2e2 + 4e3 sudaryto gretasienio tūris yra
∣∣∣∣∣∣∣
5 0 00 5 00 −2 4
∣∣∣∣∣∣∣= 100 . (4.15)
Taigi, išorinė trijų vektorių sandauga yra orientuotas tūris, kurio orientaciją api-brėžia trivektorius e123 = e1 ∧ e2 ∧ e3. Palyginkite (4.14) formulę su panašiaformule (3.17), gauta dvimačiu atveju, kur plotas irgi išreikštas determinantu.
Jei a ∧ b ∧ c tūrio, pavaizduoto 4.3a pav., ženklą laikysime teigiamu, tada4.3b pav. gretasienio b ∧ a ∧ c ženklas bus neigiamas. Iš tikrųjų,
〈bac〉3 = b∧a∧c = (b∧a)∧c = (−a∧b)∧c = −a∧b∧c = −〈abc〉3 . (4.16)
Tą patį matome ir iš (4.14) formulės. Determinanto ženklas nesikeičia, tačiauvietoje e123 gauname e213 = −e123. Taigi, tūrio ženklą arba orientaciją ap-sprendžia indeksų tvarka trivektoriuje eijk = ei ∧ ej ∧ ek. Išrikiavus indek-sus kanonine tvarka e123, visada gauname arba teigiamą +1, arba neigiamą −1orientaciją. Taikant (4.16) perstatymo taisyklę lengva parodyti, kad 3 rango pro-jektoriui 〈abc〉3 galioja lygybė
〈abc〉3 = 〈bca〉3 = 〈cab〉3 , (4.17)
t. y. rango projektoriuje vektorius galima cikliškai perstatinėti. Formulę (4.17)lengva apibendrinti n-matės erdvės n-tojo rango projektoriui 〈ab · · ·wz〉n, ku-

Trimatė erdvė. Cl3,0 algebra 65
a) b)
4.4 pav. Orientuotų trivektorių vaizdavimas a) pasvirusiu cilindru, b) rutulioišpjova arba kūgiu. Palyginkite su vaizdavimu plokštumoje 4.2 paveiksle
riame sudaugintan vektorių ab · · ·wz. Ciklinis vektorių perstatymas nekeičia joženklo, jei n yra nelyginis, ir keičia ženklą, jei n lyginis.
Trivektoriausorientaciją galima įsivaizduoti ir kaip dešininį arba kairinį sraig-tą. Tai matyti iš 4.4 paveikslo. Kadangi trimatėje erdvėje egzistuoja tik dviejųrūšių sraigtai — įsisukantys prieš arba pagal laikrodžio rodyklę, tai galimos tikdvi tūrių orientacijos. Paties trivektoriaus forma, kaip ne kartą minėjome, neturijokios reikšmės. Pavyzdžiui, vietoje 4.3 pav. pavaizduoto gretasienio trivekto-rių galime įsivaizduoti ir kaip pasvirusį cilindrą. Jo pagrindu paėmę orientuotąbivektorių B ir kokį nors vektorių a, kaip parodyta 4.4a pav., trivektorių galimeužrašyti kaip vektoriaus ir bivektoriaus išorinę sandaugą
T = a ∧ B = B ∧ a . (4.18)
Komutatyvumas išplaukia iš (4.17) formulės. Iš paveikslėlio matome, kad tūriodydis lygus
|T | = |B||a| sinα , (4.19)
kur α yra cilindro polinkio kampas. Iš čia išplaukia (4.18) formulės geometrinėinterpretacija: išorinė bivektoriaus ir vektoriaus sandauga yra orientuotas tūris.Trivektoriumi taip pat galime laikyti rutulio išpjovą, kurią nusako 4.4b pav. nu-pieštas erdvinis kampas. Tokio trivektoriaus magnitudė (dydis) lygi spindulio irerdvinio kampo sandaugai, o jo vidinę orientaciją lemia sraigto iš sferos centro įpaviršių tipas. Pateikti pavyzdžiai iliustruoja orientuotų erdvinių objektų įvairo-vę, kuria galima kūrybingai pasinaudoti, sprendžiant stereometrijos uždavinius.
4.2.3. Pseudoskaliaro savybės ir dualumas. Trijų skirtingų bazinių vek-torių sandauga, trivektorius e123 = e1e2e3 = e1 ∧ e2 ∧ e3, yra didžiausiorango Cl3,0 algebros bazinis elementas. Jis vaidina išskirtinį vaidmenį. Paprastaipseudoskaliaras žymimas simboliu I , kuris asocijuojasi su kompleksinės algeb-ros menamu vienetu, nes kaip ir šis pasižymi savybe I2 = −1. Pseudoskaliaroapgrąžos operacija (2.21) irgi labai primena menamo vieneto kompleksinį jung-tinumą I = e123 = e321 = e132 = −e123 = −I = I−1. Todėl, panašiai

66 4 skyrius
kaip menamo ir kompleksiškai jungtinio vieneto sandauga duoda realų vienetąi(i)∗ = i(−i) = 1, taip ir pseudoskaliaro sandauga iš apgręžto pseudoskaliarolygi vienetui
II = II = −II = 1. (4.20)
Kaip matėme iš 4.1 daugybos lentelės, Cl3,0 algebros pseudoskaliaras komutuojasu visais šios algebros elementais: tiek su vektoriais, tiek ir su bivektoriais,
Ia = aI, IB = BI. (4.21)
Priminsime, kad Cl2,0 algebroje pseudoskaliaras su vektoriais antikomutavo. Ko-mutuojančių su visais kitais elementais poerdvis vadinami algebros centru. Taigi,pseudoskaliaras I ir skaliaras 1 sudaro Cl3,0 algebros centrą. Pseudoskaliaro ko-mutavimo savybe pasinaudojama prastinant ir pertvarkant formules. Pavyzdžiui,bivektorius dažnai patogu užrašyti kaip bazinių vektorių ir pseudoskaliaro san-daugą e12 = Ie3, e23 = Ie1, e31 = Ie2. Kadangi I komutuoja su visais kitaiselementais, dėmesį belieka sutelkti tik į vektorius, kurių daugyba iš likusių mul-tivektorių yra paprastenė. Šia gudrybe mes netrukus ir pasinaudosime.
Pasitelkus pseudoskaliarą, galima apibrėžti labai naudingą dualumo trans-formaciją, kuri yra ne kas kita, kaip daugyba iš I−1, arba Cl3,0 algebros atveju,tiesiog iš (−I). Tiesą sakant, ją jau taikėme (4.12) formulėje kalbėdami apie vek-torinės sandaugos atitikmenį geometrinėje algebroje. Dualumo operacija Cl3,0algebroje vektorius perveda į bivektorius, ir atvirkščiai,
e1(−I) = (−I)e1 = −e23 ,
e2(−I) = (−I)e2 = −e31 ,
e3(−I) = (−I)e3 = −e12 ,
e21(−I) = (−I)e21 = −e3 ,
e32(−I) = (−I)e32 = −e1 ,
e13(−I) = (−I)e13 = −e2 .
(4.22)
Iš čia ir transformacijos pavadinimas. Geometriškai tai reiškia, kad kiekvienasvektorius virsta jam ortogonalia plokštuma, o kiekviena plokštuma pakeičiamajam statmenu vektoriumi. Jei formaliai dar parašytume 1(−I) = −I , tai galėtu-me sakyti, kad skaliarui dualus objektas yra pseudoskaliaras. Taigi, apibendrintaigalima teigti, kad skaliarų ir vektorių poerdvis yra dualus pseudoskaliarų ir bi-vektorių poerdviui.
Pasitelkusdualumo transformaciją, bendrą multivektorių galima užrašyti nau-dojant vien skaliarus ir vektorius:
M = α+ a+ B + T
= α+ (a1e1 + a2e2 + a3e3) + (b1e23 + b2e31 + b3e12) + βe123
= α+ (a1e1 + a2e2 + a3e3) + I(b1e1 + b2e2 + b3e3) + Iβ
= (α+ a) + I(β + b) ,
(4.23)

Trimatė erdvė. Cl3,0 algebra 67
kur b = b1e1 + b2e2 + b3e3 yra dar vienas vektorius. Tokia forma gali būti nau-dinga bekoordinatiniame vektoriniame skaičiavime ir kai kurie autoriai, pavyz-džiui, knygoje [9], išsiverčia vien su skaliaro ir vektoriaus poerdviu. Skaliaro irvektoriaus suma netgi turi atskirą pavadinimą — paravektorius. Taigi, į Cl3,0 al-gebrą galima žiūrėti kaip į paravektorinį skaičiavimą, kuriame menamojo vienetovaidmenį atlieka pseudoskaliaras. Mes paravektoriaus sąvokos nenaudosime.
Belieka išsiaiškinti, kaip reiktų skaičiuoti vidinę ir išorinę sandaugas su pseu-doskaliaru. Taisyklės labai paprastos:
a ∧ I = I ∧ a =0, (4.24a)
B ∧ I =I ∧ B =0, (4.24b)
λ ∧ I =I ∧ λ =λI . (4.24c)
Pirmoji ir antroji taisyklė išplaukia iš to, kad pseudoskaliaras yra aukščiausiorango mentė. Todėl padauginus pseudoskaliarą iš vektoriaus ir pritaikius asocia-tyvumo bei distributyvumo postulatus visada atsiras ei ∧ ei pavidalo daugiklis,kuris lygus nuliui. Kita vertus, daugyba iš skaliaro mentės rango nekeičia.
Vidinė sandauga mažina rangą, todėl jos sandaugos taisyklės visai kitos:
a · I = I · a = Ia, (4.25a)
B · I =I · B =IB, (4.25b)
λ · I =I · λ = 0 . (4.25c)
Išskleidus a ir B baziniais elementais bei padauginus iš pseudoskaliaro lengvaįsitikinti, kad sandaugos Ia rezultatas yra bivektorius, o IB — vektorius. Todėlvidinę sandaugą galima įsivaizduoti kaip rangą žeminantį operatorių. Pabaigaipastebėsime, kad nors pseudoskaliaras geometrinės sandaugos atžvilgiu ir elgiasikaip menamasis vienetas, jis nėra skaičius. Pavyzdžiui, pseudoskaliaro negalimakaip skaičiaus iškelti iš vidinių ar išorinių sandaugų a ∧ (Ibc) 6= Ia ∧ (bc).Pseudoskaliaras iškeliamas taikant tokias bendras taisykles:
A ∧ (BI) = (A · B)I, (4.26a)
A · (BI) =(A ∧ B)I , (4.26b)
kurias išskleidęs Cl3,0 algebros bazėje skaitytojas pats nesunkiai patikrins. Jasnaudosime vidinę sandaugą prireikus pakeisti išorine, arba atvirkščiai.
4.2.4. Vektoriaus ir bivektoriaus sandauga. Paimkime bivektorių B =a ∧ b. Pasinaudoję išorinės sandaugos asociatyvumo bei antisimetriškumo ak-siomomis (2.4) galime rašyti
B ∧ c = a ∧ b ∧ c = c ∧ a ∧ b = c ∧ B. (4.27)

68 4 skyrius
Prisiminkime, kad vektorių išorinę ir vidinę sandaugą įvedėme išskaidęgeometri-nę sandaugą (1.1) į simetrinę ir antisimetrinę dalis. Kaip matėme 2 skyriuje, tokįsuskaidymą gauname ir vektorių daugindami iš bivektoriaus, jei vidinės sandau-gos simetriją paimame priešingą išorinės sandaugos simetrijai, t.y. pareikalavę
B · c = −c · B. (4.28)
Sujungę abi formules matėme, kad geometrinę bivektoriaus ir vektoriaus sandau-gą galime išskaidyti į sumą
Bc = B · c+ B ∧ c. (4.29)
Pabrėšime, kad taip išskaidytigalima tik bivektoriaus geometrinę daugybą iš vek-toriaus. Kitokių rangų daugikliams turime naudoti apibendrintas 12 skyriaus for-mules (12.45c) ir (12.46c). Iš simetrijos savybių išplaukia lygybė
cB = −B · c+ B ∧ c, (4.30)
todėl iš formulių (4.29) ir (4.30) galime išspręsti vidinę ir išorinę sandaugas,
B · c = 12 (Bc− cB), (4.31a)
c · B = 12 (cB − Bc), (4.31b)
B ∧ c = 12 (Bc+ cB). (4.31c)
Išskyrus ženklus, šios formulės panašios į dviejų vektorių vidinę ir išorinę san-daugas.
Dabar išvesime vieną labai naudingą Cl3,0 algebroje formulę, būtent
a ∧ b ∧ c = (cab− bac)/2 , (4.32)
kuri trijų vektorių išorinę sandaugą leidžia pakeisti geometrine sandauga. Pir-miausia išreiškime narius abiejose geometrinėse sandaugose per vidinę ir išorinęsandaugas:
cab = c(ab) = c(a · b+ a ∧ b) = c(a · b) + c(a∧ b) = c(a · b)+ (−a ∧ b) · c+ a ∧ b ∧ c = (a · b)c+ (b ∧ a) · c+ a ∧ b ∧ c , (4.33a)
bac =(ba)c = (b · a+ b ∧ a)c = (b · a)c+ (b ∧ a)c = (a · b)c+ (b ∧ a) · c+ b ∧ a ∧ c = (a · b)c+ (b ∧ a) · c− a ∧ b ∧ c . (4.33b)
Pertvarkydami (4.33) formules pasinaudojome vektoriaus ir bivektoriaus geo-metrinės sandaugos formulėmis (4.29) ir (4.30). Iš (4.33a) atėmę (4.33b) ir re-zultatą padalinę pusiau, gauname (4.32) lygtį. Prisiminę ciklinio perstatymo(4.17) savybę, galėtume užrašyti dar penkias (nes kiekviename naryje perstaty-mai nepriklausomi) panašias lygtis su vietomis sukeistomis raidėmis.

Trimatė erdvė. Cl3,0 algebra 69
4.5 pav. Vektorius a ir bivektoriusB
4.2.4.1. Bivektoriaus-vektoriaus san-
daugos geometrinė interpretacija. Paim-kime vektorių a ir bet kokį bivektorių B,kaip parodyta 4.5 paveiksle. Vektorių asuskaidykime į du sandus, a = a⊥ + a‖.Vieną iš jų, a⊥, paimkime statmeną B,o kitą, a‖, — gulintį bivektoriaus plokš-tumoje. Nubrėškime ir trečią vektorių b,taip pat gulintį nagrinėjamo bivektoriaus
plokštumoje, bet statmeną sandui a‖. Šio vektoriaus ilgį parinkime tokį, kad būtųpatenkinta sąlyga
a‖ ∧ b = B . (4.34)
Kadangi b ir a‖ yra statmeni vienas kitam, galime rašyti B = a‖b. Dabar apskai-čiuokime vektoriaus a‖ ir bivektoriaus B geometrinę sandaugą
a‖B = a‖a‖b = |a‖|2b. (4.35)
Matome, kad rezultatas yra vektorius, gulintis bivektoriaus plokštumoje. Pana-šiai apskaičiuokime sandaugą a⊥B,
a⊥B = a⊥(a‖b) = a⊥a‖b . (4.36)
Kadangi vektorius a⊥, a‖ ir b parinkome vienas kitam statmenus, ši sandaugayra trivektorius, t. y. galime rašyti a⊥a‖b = a⊥ ∧ a‖ ∧ b. Iš čia išplaukia,kad vektoriaus ir bivektoriaus geometrinė sandauga, kaip jau buvo minėta, lygivektoriaus ir trivektoriaus sumai,
aB = (a‖ + a⊥)B = |a‖|2b+ a⊥ ∧ a‖ ∧ b. (4.37)
Bekoordinatiniame atvaizde ji užrašoma (palyginkite su (4.30) išraiška) taip:
aB = a · B + a ∧ B . (4.38)
Formulę, panašią į (4.38), galima užrašyti ir bivektoriuiB = b∧c, ir kai vektoriaib, c nėra ortogonalūs. Iš tiesų, pasinaudoję vektorių vidinės sandaugos apibrėži-mais ab = 2a · b− ba ir ac = 2a · c− ca, turime
a(b ∧ c) = a(bc− cb)/2 = 12(abc− acb)
= 12
Ä(2a · b− ba)c− (2a · c− ca)b
ä
= (a · b)c− (a · c)b+ 12 (cab− bac)
= (a · b)c− (a · c)b+ a ∧ b ∧ c.
(4.39)
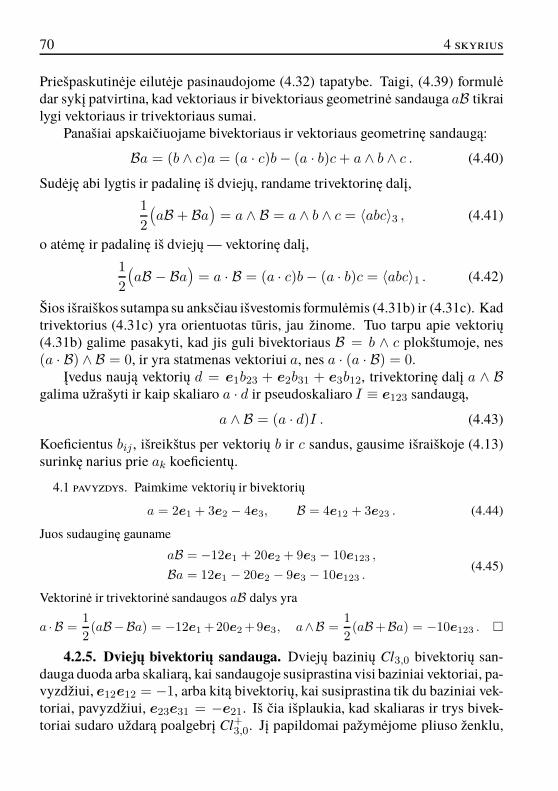
70 4 skyrius
Priešpaskutinėje eilutėje pasinaudojome (4.32) tapatybe. Taigi, (4.39) formulėdar sykį patvirtina, kad vektoriaus ir bivektoriaus geometrinė sandauga aB tikrailygi vektoriaus ir trivektoriaus sumai.
Panašiai apskaičiuojame bivektoriaus ir vektoriaus geometrinę sandaugą:
Ba = (b ∧ c)a = (a · c)b− (a · b)c+ a ∧ b ∧ c . (4.40)
Sudėję abi lygtis ir padalinę iš dviejų, randame trivektorinę dalį,
1
2
ÄaB + Ba
ä= a ∧ B = a ∧ b ∧ c = 〈abc〉3 , (4.41)
o atėmę ir padalinę iš dviejų — vektorinę dalį,
1
2
ÄaB − Ba
ä= a · B = (a · c)b− (a · b)c = 〈abc〉1 . (4.42)
Šios išraiškos sutampa su anksčiau išvestomis formulėmis (4.31b) ir (4.31c). Kadtrivektorius (4.31c) yra orientuotas tūris, jau žinome. Tuo tarpu apie vektorių(4.31b) galime pasakyti, kad jis guli bivektoriaus B = b ∧ c plokštumoje, nes(a · B) ∧ B = 0, ir yra statmenas vektoriui a, nes a · (a · B) = 0.
Įvedus naują vektorių d = e1b23 + e2b31 + e3b12, trivektorinę dalį a ∧ Bgalima užrašyti ir kaip skaliaro a · d ir pseudoskaliaro I ≡ e123 sandaugą,
a ∧ B = (a · d)I . (4.43)
Koeficientus bij , išreikštus per vektorių b ir c sandus, gausime išraiškoje (4.13)surinkę narius prie ak koeficientų.
4.1 pavyzdys. Paimkime vektorių ir bivektorių
a = 2e1 + 3e2 − 4e3, B = 4e12 + 3e23 . (4.44)
Juos sudauginę gauname
aB = −12e1 + 20e2 + 9e3 − 10e123 ,
Ba = 12e1 − 20e2 − 9e3 − 10e123 .(4.45)
Vektorinė ir trivektorinė sandaugos aB dalys yra
a · B =1
2(aB−Ba) = −12e1+20e2+9e3, a∧B =
1
2(aB+Ba) = −10e123 .
4.2.5. Dviejų bivektorių sandauga. Dviejų bazinių Cl3,0 bivektorių san-dauga duoda arba skaliarą, kai sandaugoje susiprastina visi baziniai vektoriai, pa-vyzdžiui, e12e12 = −1, arba kitą bivektorių, kai susiprastina tik du baziniai vek-toriai, pavyzdžiui, e23e31 = −e21. Iš čia išplaukia, kad skaliaras ir trys bivek-toriai sudaro uždarą poalgebrį Cl+3,0. Jį papildomai pažymėjome pliuso ženklu,

Trimatė erdvė. Cl3,0 algebra 71
Cl+3,0 1 e12 e23 e311 1 e12 e23 e31e12 e12 −1 −e31 e23e23 e23 e31 −1 −e12e31 e31 −e23 e12 −1
4.2 lentelė. Lyginės Cl+3,0 algebrosdaugybos lentelė
nes ir skaliaras, ir bivektoriai yra lyginiorango elementai. Šio poalgebrio elementųdaugyba surašyta 4.2 lentelėje. Jei šią len-telę palyginsime su kvaternionų sandaugos3.2 lentele, pamatysime, kad jos sutampa,t.y. yra izomorfiškos (e12 → i, e23 → k,e31 → j). Todėl visus kvaternioniniusskaičiavimus galima atlikti Cl+3,0 poalgeb-ryje. Cl3,0 algebroje nesunku pastebėti irdar vieną labai paprastą poalgebrį, kurį sudaro skaliaras ir pseudoskaliaras. Ka-dangi I2 = −1, šis poalgebris yra izomorfiškas kompleksiniams skaičiams. Tai-gi, Cliffordo algebra Cl3,0 yra pakankamai turtinga ir joje slepiasi tiek kvaternio-nai, tiek ir kompleksiniai skaičiai. Tai taipogi reiškia, kad Cl3,0 algebra, kaip irkvaternionai, gali būti sėkmingai taikoma sukimams trimatėje erdvėje aprašyti.
Ką gausime sudauginę du bendrus Cl3,0 bivektorius A ir B? Tai nesunkunustatyti, pritaikius dualizacijos metodą. Jo esmė — geometrines sandaugas rei-kia pakeisti taip, kad vietoje bivektorių galėtume naudoti mums jau pažįstamusvektorius, su kuriais skaičiuoti jau mokame. Pademonstruosime dualizacijos me-todo taikymą pavyzdžiu. Žinodami anksčiau aptartas pseudoskaliaro savybes, įišraišką įterpsime vienetą, užrašytą kaip pseudoskaliarų sandaugą, 1 = −II , irtaip bivektorių sandaugas pakeisime vektorių sandaugomis:
AB = A(−II)B = (IA)(−IB). (4.46)
Kadangi IA ir −IB yra vektoriai, galime rašyti
(IA)(−IB) = (IA) · (−IB) + (IA) ∧ (−IB), (4.47)
kur pirmasis narys yra skaliaras, o antrasis — bivektorius. Iš čia išplaukia, kadsandauga AB lygi skaliaro ir bivektoriaus sumai
AB = 〈AB〉+ 〈AB〉2 . (4.48)
Jei bivektorius išreikšime per bazinius elementusA = a12e12+a23e23+a31e31ir B = b12e12 + b23e23 + b31e31, skaliarą gausime sudauginę koeficientus prietų pačių bazinių elementų,
〈AB〉 = −a12b12 − a21b21 − a31b31 . (4.49)
Skirtingų elementų sandaugos duos bivektorių:
〈AB〉2 =(a31b23 − a23b31)e12
+ (a12b31 − a31b12)e23
+ (a23b12 − a12b23)e31 .
(4.50)

72 4 skyrius
4.6 pav. Bivektoriausprojekcija į bivektorių
Gautos išraiškos primena dviejų vektorių vidinę irišorinę sandaugas. 4.6 paveiksle parodyta dviejų bi-vektorių B ir C skaliarinės sandaugos geometrinė in-terpretacija. Pasinaudojus dualumo transformacijanesunku išvesti bivektorių vidinės sandaugos dydžioapskaičiavimo formulę, kuri yra labai panaši į vek-torių, tik ženklas prieš sandaugą išeina priešingas,
B · C = −|B||C| cosθ . (4.51)
Čia θ žymi kampą tarp abiejų bivektorių plokštumų. Vidinė sandauga duoda nulį,jei bivektorių plokštumos yra ortogonalios, pavyzdžiui, e12 · e23 = 0. Panašiaiišvedama ir formulė bivektorių išorinės sandaugos dydžiui apskaičiuoti,
|B ∧ C| = |B||C| sinθ . (4.52)
4.2.6. Atvirkštinis vektorius, bivektorius, pseudoskaliaras ir multivek-torius. Nors geometrinė sandauga yra vienareikšmė operacija, tai dar nereiškia,kad kiekvienas geometrinės algebros multivektorius turi atvirkštinį. Paimkime,pavyzdžiui, multivektoriusA = 1
2 (1+ e1) ir B = 12(1− e1). Akivaizdu, kad šie
multivektoriai tenkina savybesAA = A, BB = B. Multivektorius, kurio kvadra-tas lygus pačiam sau, vadinamas idempotentiniu. Tokie multivektoriai yra labaisvarbūs, nes iš jų konstruojami projektoriai į įvairius multivektorių poerdvius.Šio klausimo plačiau neaptarsime, nes dabar mums yra svarbi kita savybė. Su-dauginę A ir B multivektorius gauname, kad AB = 0. Jei padarytume prielaidą,kad A turi atvirkštinį A−1, gautume
AB = 0 ⇔ A−1AB = 0 ⇒ B = 0. (4.53)
Tačiau mūsų pasirinktas B 6= 0. Gavome prieštarą, todėl prielaida, kad A turiatvirkštinį, yra neteisinga.
Jei atvirkštinis multivektorius vis dėlto egzistuoja, tai tuomet atvirkštinis iškairės ir atvirkštinis iš dešinės sutampa:
M−1M = MM−1 = 1 . (4.54)
Baziniams algebros elementams atvirkštinius apskaičiuoti labai paprasta. Tamtereikia visus ei surašyti priešinga tvarka, t.y. pritaikyti apgrąžos (2.22) transfor-maciją. Pavyzdžiui, pseudoskaliarui atvirkštinis yra I−1 = I = −I , nes
II−1 = II = (e1e2e3)(·e1e2e3) = (e1e2e3)(e3e2e1) = 1 . (4.55)
Vektoriuia = a1e1+a2e2+a3e3 ir bivektoriuiB = b12e12+b23e23+b31e31atvirkštiniai a−1 ir B−1 taip pat randami pritaikius apgrąžą. Apskaičiuojant at-

Trimatė erdvė. Cl3,0 algebra 73
virkštinį bivektoriui patogu pasinaudoti dualizacijos metodu. Pirmiausia apskai-čiuojame abiejų elementų magnitudės kvadratus:
|a|2 = aa = aa = a2 = a21 + a22 + a23 ,
|B|2 = BB = BB = b212 + b223 + b231 .(4.56)
Žinodami juos galime lengvai užrašyti atvirkštinius elementus
a−1 =a
|a|2 =a
|a|2 , B−1 =B
|B|2 = − B|B|2 . (4.57)
Jei turime vienetinį vektorių ar bivektorių, tada (4.57) virsta
a−1 = a , B−1 = −B . (4.58)
Todėl bet kurios krypties vienetinis vektorius sutampa pats su savimi, o atvirkšti-nio vienetinio bivektoriaus kryptis pasikeičia į priešingą. Kadangi abu elementaiyra vienas kitam dualūs, tai ir jų atvirkštinių elementų apskaičiavimo formulėspanašios.
Deja, bendro pavidalo Cl3,0 multivektoriui (4.5) atvirkštinio multivektoriausformulė daug sudėtingesnė. Ji išvesta [10] darbe. Čia pateikiame tik galutinįrezultatą:
M−1 =(α− a− B + T )(φ+ γI)
φ2 + γ2, φ2 + γ2 6= 0 (4.59a)
kur T = ζI yra trivektorius, o φ ir γ tokie skaliarai:
φ = α2 − a2 + BB + T T = α2 − (a21 + a22 + a23) + (b212 + b223 + b231)− ζ2 ,
γ = I(aB + Ba + 2αT ) = 2(a1b23 + a2b31 + a3b12 − αζ) . (4.59b)
Jei multivektorius M yra skaliaro ir vektoriaus, M = α + a, arba skaliaro irbivektoriaus, M = α+ B, ar skaliaro ir pseudoskaliaro,M = α+ P, suma, tada(4.59a) formulė gerokai supaprastėja:
M−1 =
(α + a)−1 = α−aα2−a2 ,
(α + B)−1 = α−Bα2+BB = α−B
α2+|B|2 ,
(α + T )−1 = α−Tα2+T T
= α−Tα2+ζ2
.
(4.60)
Šiuos atvejus skaitytojas lengvai apskaičiuos ir netaikydamas bendros formulės.Jei (4.59a) formulę užrašytume multivektorių sandais, gautume gana sudėtingąišraišką. Laimei, bendro pavidalo multivektoriaus atvirkštinį tenka skaičiuoti la-bai retai. Dažniausiai užtenka paprastesnių (4.60) formulių.

74 4 skyrius
Vektoriaus aVidinė sandauga Išorinė sandaugasandauga iš
skaliaro λ a · λ = −λ · a = 0 a ∧ λ = λa
vektoriaus b a · b = b · a a ∧ b = −b ∧ abivektoriaus B a · B = −B · a a ∧ B = B ∧ atrivektoriaus T aT = a · T = T · a = Ta a ∧ T = −T ∧ a = 0
4.3 lentelė. Cl3,0 algebros daugybos iš vektoriaus operacijų simetrijos savybės
4.2.7. Multivektorinių formulių prastinimas. Mes jau pakankamai žino-me apie multivektorius, kad galėtume vienus multivektorius pertvarkyti į kitusarba juos prastinti. Atliekant veiksmus, svarbu atkreipti dėmesį į ženklus, kurieskiriasi vektoriaus-vektoriaus ir vektoriaus-bivektoriaus sandaugose, o taip pat įjų simetriją. Pavyzdžiui, a · b = b · a ir a ∧ B = B ∧ a yra simetrinės, tačiaua ∧ b = −b ∧ a ir a · B = −B · a antisimetrinės sandaugos. Kad būtų papras-čiau prisiminti, jas surašėme į atskirą 4.3 lentelę. Dabar pateiksime keletą tipiniųmultivektorinių išraiškų pertvarkymo pavyzdžių.
4.2 pavyzdys. Paimkime a ∧ b plokštumai statmeną vektorių c. Parodysime, kadvektoriaus c ir bivektoriausa∧ b skaliarinė sandauga tokiu atveju lygi nuliui, t. y. c ·(a∧b) = 0. Statmenumo sąlyga bet kokiems vektoriams a ir b reiškia, kad c ·a = 0, c ·b = 0,t.y. ca = −ac, cb = −bc. Tuo ir pasinaudosime:
c · (a ∧ b) = c · (ab− ba)/2 = 14 [c(ab− ba)− (ab− ba)c]
= 14(cab− cba− abc+ bac) = 1
4(cab − cba+ acb− bca)
= 14(cab− cba− cab+ cba) = 0 .
(4.61)
4.3 pavyzdys. Patikrinsime, kad bet kokie trys vektoriai tikrai tenkina anksčiau išvestą(4.32) sąryšį:
cab− bac = (c · a+ c ∧ a)b− b(a · c+ a ∧ c) = (c ∧ a)b − b(a ∧ c)= −[(a ∧ c)b+ b(a ∧ c)] = −2(a ∧ c) ∧ b = 2a ∧ b ∧ c . (4.62)
Kai visi trys vektoriai guli vienoje plokštumoje, turime a∧ b∧c = 0. Iš gautos formulėsišplaukia trijų vektorių komplanarumo sąlyga: cab = bac.
4.4 pavyzdys. Dabar išvesime labai svarbią tapatybę
a · (b ∧ c) = (a · b)c− (a · c)b , (4.63)

Trimatė erdvė. Cl3,0 algebra 75
kuri leidžia išskleisti išorinę sandaugą, ir kurią galima apibendrinti, vietoje b∧c paėmusbet kokį skaičių daugiamatės erdvės vektorių.
a · (b ∧ c) = 12
[a(b ∧ c) − (b ∧ c)a
]vidinė sandauga
= 14
[a(bc− cb)− (bc − cb)a
]išorinė sandauga
= 14
[(ab)c− (ac)b− (bc− cb)a
]asociatyvumas
= 14
[(2a · b− ba)c− (2a · c− ca)b− (bc− cb)a
]išreiškimas iš ab = 2a · b− ba
= 14
[(2a · b)c− b(ac)− (2a · c)b+ c(ab)− (bc− cb)a
]asociatyvumas
= 14
[(2a · b)c− b(2a · c − ca)− (2a · c)b+ c(2a · b− ba)− (bc− cb)a
]išreišk. ab
= 14
[(2a · b)c− (2a · c)b+ (bc)a− (2a · c)b+ (2a · b)c− (cb)a− (bc− cb)a
]
= (a · b)c − (a · c)b asociatyvumas ir panašių narių suprastinimas .
Šie pavyzdžiai demonstruojavieną iš galimų skaičiavimostrategijų geometri-nėje algebroje. Ji labai paprasta: kai norime ką nors apskaičiuoti ar supaprastinti,patogu vidines ir išorines sandaugas pervesti į geometrines. Kai gautą rezulta-tą norim geometriškai interpretuoti, elgiamės priešingai: geometrines sandaugasužrašom per vidines ir išorines sandaugas.
4.3. Elementarios multivektoriaus funkcijos
Kadangi multivektorius mokame dauginti, tai mokame ir juos pakelti svei-kuoju laipsniu Mn. Pavyzdžiui, pakėlę (4.5) kvadratu gauname naują multivek-torių
M2 ≡ MM = 〈M2〉0 + 〈M2〉1 + 〈M2〉2 + 〈M2〉3 , (4.64a)
kur
〈M2〉0 = α2 + a21 + a22 + a23 − b212 − b223 − b231 − ζ2 ,
〈M2〉1 = 2(a1α− b23ζ)e1 + 2(a2α− b31ζ)e2 + 2(a3α − b12ζ)e3 ,
〈M2〉2 = (b12α + a3ζ)e12 + (b31α + a2ζ)e31 + (b23α + a1ζ)e23 ,
〈M2〉3 = 2(a1b23 + a2b31 + a3b12 + αζ)e123 .
(4.64b)
Bendra multivektoriaus kvadrato, o tuo labiau aukštesnių laipsnių formulės yragana sudėtingos.
Jei multivektorius turi paprastą mentės pavidalą, pavyzdžiui, M = β e12,laipsnių išraiškos labai supaprastėja, nes visi aukštesni laipsniai duoda arba ska-liarą, arba tą patį bivektorių:
M = βe12, M2 = −β2, M3 = −β3e12, M4 = β4, M5 = β5e12, ir t. t.(4.65)

76 4 skyrius
Taigi, turime tik skaliarus bei e12 tipo bivektorius. Tokiu atveju laipsninės eilutėsužrašomos labai paprastai. Mokėti apskaičiuoti eilutes yra labai svarbu, nes jo-mis nusakomos įvairios multivektorinės funkcijos. Pavyzdžiui, multivektoriauseksponentę nusako įprasta eksponentinės funkcijos eilutė
eM = 1 +M
1!+
M2
2!+
M3
3!+ · · · . (4.66)
Kai M = βe12, šią eilutę galima susumuoti į sinuso ir kosinuso funkcijas,
eβ e12 = 1 +βe121!
− β2
2!− β3e12
3!+β4
4!+β5e125!
− · · ·
=(1− β2
2!+β4
4!− · · ·
)+ e12
( β1!
− β3
3!+β5
5!− · · ·
)
= cos β + e12 sin β .
(4.67)
Nesunku suprasti, kad gauta multivektorinė lygybė teisinga ir kitiems baziniamsbivektoriams eij , kurie tenkina sąlygą e2ij = −1,
eβ eij = cosβ + eij sinβ . (4.68)
Šiek tiek paplušėjus su eilutėmis galima įsitikinti, kad egzistuoja ir bendresnėformulė, kurios eksponentėje stovi bet koks bivektorius B,
e±Bt = cos |B|t± B|B| sin |B|t , (4.69)
kur |B| =√BB =
»b212 + b223 + b231 , ir B2 = −|B|2, o t yra parametras (ska-
liaras), pavyzdžiui, laikas. Ši formulė yra labai svarbi, nes aprašo sukimą plokš-tumoje, kurią užduoda bivektorius B. Dar kartą pabrėšime, kad geometrinės al-gebros požiūriu sukimasis vyksta būtent plokštumoje, o ne aplink ašį.
Jei eksponentėje stovi ne bivektorius, o vektorius v = v1e1 + v2e2 + v3e3,kuriam, skirtingai nuo bivektoriaus, v2 = |v|2 > 0, arba tokio vektoriaus irskaliaro α suma, tada eilutės susumuojamos į hiperbolines funkcijas,
eα+v = eα(ch |v|+ v
|v| sh |v|), kur |v| =
»v21 + v22 + v23 . (4.70)
Ištraukti iš multivektoriaus kvadratinę šaknį√M arba apskaičiuoti jo loga-
ritmą yra sudėtingiau, o rezultatai išeina gana ilgi. Tačiau atskirais atvejais juospavyksta gauti gana paprastai. Pavyzdžiui, parodysime, kad šaknis iš bazinio tri-vektoriaus yra
√e123 = ±(1 + e123)
¿√2 . (4.71)

Trimatė erdvė. Cl3,0 algebra 77
Pasinaudosime tuo, kad e123 ≡ I savybės panašios į menamo vieneto. Kadangi
eIϕ = cosϕ+ I sinϕ , (4.72)
tai paėmę ϕ = π/2, turime I = eIπ/2. Ištraukę šaknį randame√I = eIπ/4 = (1 + I)/
√2 . (4.73)
Rezultatą patikriname:Ä(1 + I)/
√2ä2
= (1 + 2I − 1)/2 = I .Pademonstuosime bendresnį metodą. Tuo tikslu ištrauksime kvadratinę šaknį
iš bivektoriaus:
B = b12e12 + b23e23 + b31e31 . (4.74)
Pasinaudosime tuo, kad Cl3,0, kaip ir visos geometrinės algebros, yra uždara. To-dėl multivektorius
√B bendru atveju turi būti lygus skaliaro, vektoriaus, bivek-
toriaus ir pseudoskaliaro sumai. Multivektoriaus kvadrato sandai apskaičiuojamipagal (4.64b) formulę. Prilyginę juos pradinio multivektoriaus sandams (4.74),gauname aštuonias lygtis ieškomų koeficientų atžvilgiu. Imdami tik realiąsiasšaknis randame keturis multivektorius:√B = ± 1√
2
(»|B|+ B
¿»|B|),
√B = ± 1√
2
(B¿»
|B|+»|B| e123
),
(4.75)
kurias pakėlę kvadratu gauname (4.74) formulę.
4.4. Multivektorinės lygtys
Pademonstruosime, kaip sprendžiamos lygtys, kurių kintamieji yra multivek-toriai. Kadangi kintamieji lygtyse nekomutuoja, tokias lygtis išspręsti gerokaisunkiau. Jos sprendžiamos pastangų didėjimo tvarka žemiau išvardytais būdais:
1. Pasinaudoję geometrinės algebros veiksmais mėginame išspręsti lygtįieškomo multivektoriaus atžvilgiu.
2. Nustatę ieškomo multivektoriaus sandarą, pavyzdžiui, kad jis gali būtitik vektoriaus ir bivektoriaus suma, multivektorinę lygtį suskaidome įkelias paprastesnes lygtis vektoriui, bivektoriui ar pan., kurias spren-džiame atskirai. Metodas dažnai taikomas, kai multivektorių galimasuskaidyti į lyginę ir nelyginę dalis.
3. Jei pirmieji du būdai neveikia, sprendžiamą lygtį užrašome pasirinktojebazėje e1, e2, . . . , en ir, sudarę tiesinę 2n lygčių sistemą, ją išspren-džiame tiesinės algebros metodais.

78 4 skyrius
Trečiasis būdas, nors ir universalus, geometrinės algebros požiūriu nėra įdomus.Kaip taikyti antrąjį būdą, ką tik matėme traukdami kvadratinę šaknį iš bivekto-riaus. Todėl toliau pavyzdžiais pademonstruosime, kaip taikomas pirmasis bū-das.
4.5 pavyzdys. Išspręsime labai paprastą lygtį
a ∧ X = 0, (4.76)
kur a vienetinis vektorius, o X yra ieškomasis bivektorius. Kadangi išorinė sandaugalygi nuliui, šią lygtį pakeisime kita lygtimi
aX = a · X = b, (4.77)
kur b yra vektorius, kurį nusako a ir X . Padauginę abi puses iš atvirkštinio vektoriausa−1 = a gauname
X = ab = a · b+ a ∧ b = a ∧ b, (4.78)
nes a·b = a·(a·X ) = a·(aX−X a)/2 = 14 [a(aX−X a)+(aX−X a)a] = 0. Paskutinė
lygtis rodo, kad vektoriai a ir b yra vienas kitam ortogonalūs. Tokiu pat būdu parodoma,kad b ∧ X = 0. Taigi, (4.78) lygtis rodo, kad ieškomą bivektorių sudaro vienetinisvektorius a ir jam ortogonalus vektorius b, kurį apskaičiuojame iš skaliarinės sandaugos(4.77). Tokiu būdu ieškomąjį bivektoriųX išskaidėme į dviejų vektorių sandaugą. Kitaisžodžiais, išsprendėme taip vadinamą multivektoriaus faktorizacijos uždavinį.
4.6 pavyzdys. Išspręsime tiesinę lygtį
αx+ a b · x = c (4.79)
x vektoriaus atžvilgiu. Čia α yra skaliaras, o b ir c — vektoriai. Padauginę iš dešinėsvidine sandauga abi lygties puses iš vektoriaus b, lygtį paverčiame skaliarine
αx · b+ a · b b · x = c · b. (4.80)
Iš jos surandame skaliarą
b · x =b · c
α+ b · a , (4.81)
kurį įstatę į pradinę lygtį ir gauname ieškomąjį vektorių:
x =c
α− b · cα(α+ b · a) a. (4.82)
Kadangi naudojomės tik vektorių sandaugomis, gautas atsakymas teisingas ne tik trima-tei Cl3,0 algebros erdvei, bet ir bet kuriai n-matei erdvei. Šis pavyzdys rodo, kad tiesiniųlygčių sprendimas geometrinės algebros metodu yra labai taupus.
4.7 pavyzdys. Ankstesnių lygčių sprendimo būdai tiko bet kokiai geometrinei algeb-rai. Dabar išspręsime vektorinę lygtį
αx+ B · x = a (4.83)

Trimatė erdvė. Cl3,0 algebra 79
konkrečiai Cl3,0 algebrai, kurioje pseudoskaliaras komutuoja su visais algebros elemen-tais. Pasinaudoję šia savybe ir padauginę abi lygties puses iš I, galime rašyti
αIx+ IB · x = Ia . (4.84)
Pasinaudoję (4.26b) formule ir pastebėję, kad
IB · x =1
2I(Bx − xB) = 1
2[(IB)x − x(IB)] = (IB) ∧ x , (4.85)
nes b = IB yra vektorius, lygtį perrašome pavidalu
αIx + (IB) ∧ x = Ia . (4.86)
Žinodami, kad sandauga b ∧ (b ∧ x) = 0, padauginkime išorine sandauga abi lygtiespuses iš vektoriaus IB. Taip panaikinsime lygties (4.86) narį su bivektoriumi B,
(IB) ∧ (αIx) = (IB) ∧ (Ia) . (4.87)
Kadangi IB yra vektorius, o αIx ir Ia bivektoriai, tai užrašę išorinę sandaugą per geo-metrinę galime suprastinti pseudoskaliarus,
(IB) ∧ (αIx) = α(IBIx + IxIB)/2 = −α(Bx+ xB)/2 = −αB ∧ x. (4.88)
Panašiai padarę ir su dešine (4.87) lygybės puse, gauname,
B ∧ x = α−1B ∧ a . (4.89)
Dabar, jei šią lygtį sudėsime su pradine (4.83) lygtim,
αx+ B · x+ B ∧ x = a+ α−1B ∧ a , (4.90)
tai kairėje pusėje esančias išorinę ir vidinę sandaugas galėsime pakeisti atvirkštinę ope-raciją turinčia geometrine sandauga
(α+ B)x = a+ α−1B ∧ a . (4.91)
Todėl
x = (α+ B)−1(a+ α−1B ∧ a) . (4.92)
Pasinaudoję (4.60) formule galutinai turime
x =(α −B)(αa + a ∧ B)
α(α2 + |B|2) . (4.93)
Skaitytojas gali patikrinti, kad dešinėje šios lygybės pusėje tikrai yra vektorius.

80 4 skyrius
4.5. Atspindžiai ir sukimai
4.7 pav. Vektoriaus a atspindysplokštumoje B⊥n. Atspindėtasvektorius yra a′ = −nan
3 skyriuje matėme (3.5 pav.), kad geo-metrinė algebra mums leidžia paprastai irefektyviai aprašyti sukimus dvimatėse erd-vėse, todėl nenuostabu, kad atspindžius irsukimus įmanoma aprašyti ir aukštesnių di-mensijų erdvėse. Nuostabiausia tai, kadšiuos atspindžius ir sukimus aprašo lygiai tapati (3.46) formulė, kurioje esantį bivekto-rių tereikia pakeisti kitos erdvės, šiuo atvejuCl3,0, bivektoriumi. Taigi, keičiasi tik pie-šiniai, o ne formulės ar jų geometrinė inter-pretacija. Palyginti bus lengviau, jei vekto-
riaus sukimo formulę (3.46) perrašysime dabar naudojamais žymėjimais
a′′ = ee12θ/2ae−e12θ/2 , (4.94)
kura yra pradinis vektorius, o a′′ — plokštumojee12 kampu θ pasuktas vektorius.Taigi, bivektorius nusako sukimą savo plokštumoje. Kadangi (4.94) formulė yralabai svarbi ir bendra, ją verta dar kartą nuosekliai išvesti Cl3,0 algebroje, o gautąrezultatą palyginti su Cl2,0 algebros formule (4.94).
Kaip ir anksčiau, pirmiausia raskime vektoriaus a atspindį plokštumos B at-žvilgiu (4.7 pav.). Atspindžio plokštumą tegu nusako statmenas šiai plokštumaivienetinis vektorius n, n2 = 1. Suskaidykime a į du sandus: vieną lygiagretų,kitą statmeną atspindžio plokštumai B
a = n2a = n(n · a+ n ∧ a) = a⊥ + a‖ , (4.95)
kur a⊥ = nn · a ir a‖ = nn ∧ a. Įsitikinkime, kad a‖ yra statmenas vienetiniamvektoriui n, t.y. patikrinkime, ar a‖ ir n vidinė sandauga tikrai lygi nuliui:
a‖ · n = 12(a‖n+ na‖) =
12 [n(n ∧ a)n+ n2(n ∧ a)]
= 14 [n(na− an)n+ na− an]
= 14(an − na+ na− an) = 0 .
(4.96)
Kaip matyti iš brėžinio, atspindėto vektoriaus statmenas B plokštumai sandasįgyja priešingą ženklą a′ = a‖ − a⊥. Įstatę projekcijas, randame
a′ = nn ∧ a− nn · a= n(−a ∧ n− n · a) VEKTORIAUS ATSPINDYS
= −nan .(4.97)

Trimatė erdvė. Cl3,0 algebra 81
4.8 pav. Sukimas trijuose matavi-
muose. RotoriusR = e−Bθ/2 pasu-ka vektorių a kampu θ į vektorių a′
Pastebėsime, kad išvedant formulę nekėlė-me jokių reikalavimų nei vektoriaus a, neiplokštumosB padėčiai erdvėje, t.y. skirtin-gai nei pavaizduota paveiksle, vektoriauspradžia nebūtinai yra įbesta į plokštumą.Niekur nekalbėjome ir apie erdvės dimen-siją, todėl formulė tinka ir daugiamatėmserdvėms. Lengva patikrinti, kad dar kartąatspindėtas vektorius, kaip ir turi būti, su-tampa su pradiniu:
− na′n = −n(−nan)n = a. (4.98)
Pereikime prie sukimų trimatėje erdvėje. Planimetrijoje (3.3 pav.) matėme,kad sukimą plokštumoje kampu 2ϕ realizuoja du vienas po kito sekantys atspin-džiai tiesių, susikertančių kampu ϕ, atžvilgiu. Lygiai tokiu pačiu būdu galimagauti ir sukimą trimatėje erdvėje, tik atspindžius dabar teks atlikti ne tiesių, obesikertančių kampu θ vertikalių plokštumų (žr. 4.8 pav.) atžvilgiu. Dviejų tokiųatspindžių rezultatas yra vektoriaus posūkis apie plokštumų susikirtimo liniją,piešinyje pavaizduotą stora brūkšnine vertikalia linija.
Užrašykime trimačio sukimo formulę. Paimkime du vienetinius vektorius mir n. Šie vektoriai yra statmeni mūsų atspindžio plokštumoms ir tuo pačiu nusakoplokštumų padėtį erdvėje. Pirmasis atspindys vektorių a perveda į vektorių b,
b = −mam , (4.99)
o antrasis — vektorių b į vektorių c,
c = −nbn = −n(−mam)n = nmamn. (4.100)
Taigi, sukimas trimatėje erdvėje užrašomas stebėtinai paprastai. Dar gražiau jįužrašysime, jei apibrėšime dydį
R = nm, (4.101)
kurį pavadinsime rotoriumi. Kadangi m−1= m/|m|2= m, o n−1= n/|n|2= n,tai mn = m−1n−1 = (nm)−1 = R−1, pasukto vektoriaus formulė įgyja labaielegantišką pavidalą:
a′ = c = RaR−1 . (4.102)
Gautoji formulė yra labai bendra, nes ją išvedant nesinaudojome kokiomis norskonkrečiomis trimatės erdvės savybėmis.Todėl (4.102) išraiška tinka irn-matėmseuklidinėms, Minkowskio ir kitoms plokščios metrikos erdvėms, nes yra žinoma,kad visose šiose erdvėse bet koks sukimas gali būti išreikštas lyginiu skaičiumi

82 4 skyrius
(≤ n) veidrodinių atspindžių dvimatėse plokštumose. Šią teoremą pirmą kartąįrodė É. Cartanas (Élie Cartan 1868–1951), o ją apibendrino J. Dieudonné1.
Tiesa, mūsų užrašytas rotoriaus pavidalas (4.101) daugiamatėms erdvėmsnėra tinkamas, nes atspindžių plokštumas nusako joms statmeni vienetiniai vek-toriai. Aukštesnių dimensijų erdvėse, deja, taip atspindžio plokštumų nusakytinegalima, todėl formulę perrašysime daugiamatėms erdvėms tinkamu pavidalu
R = nm = n · m+ n ∧ m= |n||m| cos θ + n ∧ m = cos θ + n ∧ m. (4.103)
Šioje formulėje išorinė sandauga n∧ m reiškia vienetinę plokštumą (ji statmenasukimo ašiai), kurioje ir vyksta sukimas. Formulė (4.103) jau yra bendra ir tinkavisiems atvejams. Išties, kadangi |m∧n| = |m||n| sin θ = sin θ, galima apibrėžtivienetinį bivektorių plokštumoje, sudarytoje iš m ir n vektorių,
B =m ∧ nsin θ
, B2 = −1. (4.104)
Pasirinkome m ∧ n, o ne n ∧ m, nes tada vektoriaus sukimas kampu θ sutampasu plokštumos orientacija einant nuo m link n. Naudojant vienetinį bivektorių Brotorių (4.103) galima užrašyti tokiu būdu:
R = cos θ − B sin θ = e−Bθ, (4.105)
kur eksponentę nuo bivektoriaus suprantame kaip eksponentės eilutę. Kadangieksponentė su θ pasuka kampu 2θ, bus patogiau, jei jos rodiklį padalinsime išdviejų. Tada vektoriaus a pasukimą kampu θ, užduos vienetinis bivektorius B,
a → a′′ = e−Bθ/2aeBθ/2, (4.106)
kur pasuktą vektorių pažymėjome a′′. Ši formulė vėl akivaizdžiai rodo, kad suki-mas vyksta plokštumoje, o ne aplink ašį. Vienetinį bivektorių B pakeitus į −e12matome, kad ji visiškai sutampa su dvimačio sukimo formule (4.94).
4.8 pavyzdys. Paimkime n, lygiagretų e1, o m — lygiagretų e2 vektoriams. Tada−B = n ∧ m = |n||m| sin θ e1 ∧ e2 = sin θ e12, nes e1 ir e2 yra ortogonalūs. Kaiθ = π/2, rotorius įgyja pavidalą R = e12 = ee12π/2, kurį užrašydami pasinaudojome(4.68) formule. Trimatėje erdvėje tokį sukimą suprantame taip. Vienetinį vektorių e1atitinka plokštuma e23, o e2 — plokštuma e31. Šių plokštumų susikirtimas yra ašis e3,kuriai dualus ir yra eksponentėje pasirodęs bivektoriuse12. Taigi, atspindys plokštumoje
1Jean Dieudonné (1906–1992) praeitame šimtmetyje suvienijo to meto gabiausių prancūzųmatematikų grupę, kurios tikslas buvo pertvarkyti ir aksiomatizuoti visą matematiką, siekiant jaisuteikti kuo griežtesnę ir tikslesnę formą. Grupės darbus (apie 30 tomų) redagavo Dieudonné irspausdino juos nežinomo atsargos generolo Nicolas Bourbaki vardu.

Trimatė erdvė. Cl3,0 algebra 83
e23 ir po jo sekęs atspindys plokštumojee31 yra ekvivalentiškas posūkiui kampu π aplinke3. Jei pradinis vektorius yra a = a1e1+a2e2+a3e3, tai po pasukimo gausime vektoriųa′ = RaR−1 = e12ae
−112 = e12(a1e1+a2e2+a3e3)e21 = −a1e1−a2e2+a3e3.
Pabrėšime, kad rotorius, užrašytas per trigonometrines funkcijas,
R = exp(−Bθ
2
)= cos
θ
2− B sin
θ
2, ROTORIUS (4.107)
yra skaliaro ir bivektoriaus suma, todėl, apskritai kalbant, jis nėra homogeni-nis multivektorius. Pastebėję, kad atvirkštinį rotorių gauname pritaikę apgrąžos
transformaciją, R = expÄ− ˜Bθ/2
ä= exp(Bθ/2), išvedame tokią savybę:
RR = RR = 1, R−1 = R . (4.108)
Šia savybe pasižymintys multivektoriai vadinami unitariniais. Taigi, vektoriauspasukimą aprašo formulė
a′′ = RaR , (4.109)
kur rotorius R yra unitarinis multivektorius. Jei (4.109) formulės kairę pusę pa-dauginsime iš R, o dešinę iš R, gausime panašią formulę
a = Ra′′R , (4.110)
kuri suka vektorių į priešingą pusę.Akivaizdu, kad užrašytos formulės leidžia vieną po kito atlikti pasukimus
skirtingose plokštumose. Pavyzdžiui, pasukę pradžioje su R1, o po to su R2,vektorių a pervesime į
a→ a′′ = R2R1aR1R2 = R3aR3 , (4.111)
kur R3 = R2R1 naujas rotorius. Jis yra taip pat unitarinis: R3R3 = R2R1flR2R1 =
R1R2R2R1 = 1.Jei du vektorius, pavyzdžiui, a ir b, tuo pačiu rotoriumi pasuksime nepriklau-
somai vieną nuo kito, tai naujų vektorių a′ = RaR ir b′ = RbR vidinė sandaugaišliks nepakitusi:
a′ · b′ = (a′b′ + b′a′)/2 = (RaRRbR+ RbRRaR)/2
= R(ab+ ba)
2R = a · bRR
= a · b .
(4.112)
Iš geometrinių samprotavimų taip pat aišku, kad jei rotoriaus bivektorius gulėsa∧ b plokštumoje, tai sukant išorinę ir geometrinę vektorių sandaugas a∧ b ir abjos taip pat nepasikeis, a′ ∧ b′ = a ∧ b ir a′b′ = ab.

84 4 skyrius
4.6. Bivektorių atspindys ir sukimas
4.9 pav. Plokštuma B ir jos atspin-dys nBn−1. Iš piešinio akivaizdu, kadplokštumos B projekcija (tamsus plo-tas) į plokštumą In bus 1
2 (B+nBn−1)
Paimkime du vektorius a ir b ir iš jų su-darykime bivektorių B = a ∧ b. Jei abuvektorius a ir b atspindėsime plokštumoje,kurią nusako vienetinis vektorius n, gausi-me atspindėtą bivektorių, kaip pavaizduota4.9 paveiksle,
B′ = (−nan) ∧ (−nbn). (4.113)
Pasinaudojus vektorių išorinės sandaugosapibrėžimu, jį galima supaprastinti:
B′ = 12 (nan nbn− nbn nan)
= 12 n(ab− ba)n = nBn.
(4.114)
Taigi, bivektoriaus atspindį nusako formulė,
B′ = nBn , BIVEKTORIAUS ATSPINDYS (4.115)
Matome, kad dabar, priešingai nei atspindint vektorių (4.97), atspindys ženklonekeičia. Senojo vektorinio skaičiavimo terminais tai ir reiškia, kad bivektoriusyra aksialinio vektoriaus analogas, kurio ženklas atspindžio metu taip pat nepasi-keičia. Kaip matome, geometrinės algebros požiūriu ženklas nepasikeičia todėl,kad bivektorius yra išorinė dviejų vektorių sandauga. Nors kiekvieno iš vektoriųženklas pasikeitė į priešingą, sandaugos ženklas nuo to nepasikeičia.
O kaip atspindžio metu elgiasi pseudoskaliaras? Žinant vektoriaus ir bivek-toriaus atspindžio taisykles, tai visai nesunku surasti. Pažymėkime B = b ∧ c,tada
I ′ = a′ ∧ B′ = 12(a
′B′ + B′a′) = 12 (−nan nBn − nBn nan)
= −12 n(aB + Ba)n = −nIn
= −I ,(4.116)
nes pseudoskaliaras komutuoja su visais šios algebros elementais. Čia I ≡ I3yra trijų bazinių vektorių sandauga. Tuo tarpu dvimatėje erdvėje, kur I = I2 =e1 ∧ e2, matyti, kad atspindys pseudoskaliaro ženklo nepakeis. Nesunku susi-gaudyti, kad n-matėje erdvėje pseudoskaliaras In po atspindžio arba keis ženklą,arba ne, priklausomai nuo to, ar n yra nelyginis, ar lyginis. Taigi, erdves gali-ma suskirstyti į dvi klases, pagal tai, ar pseudoskaliaras po atspindžio pakeičiasavo ženklą ar ne. Anksčiau erdvių lygiškumą nustatydavome pagal vektorių ba-zės orientacijos pasikeitimą inversijos transformacijos metu. Matome, kad erdvių

Trimatė erdvė. Cl3,0 algebra 85
lygiškumo skirstymas pagal pseudoskaliaro atspindžio savybes duoda tą patį at-sakymą. Taigi, inversija ir atspindys yra tarpusavyje glaudžiai susiję.
Iš (4.12) formulės žinome, kad senojo vektorinio skaičiavimo vektorinė vek-torių sandauga a × b geometrinėje algebroje keičiama į a × b → −Ia ∧ b.Pažymėję B = a ∧ b ir atspindėję šio sąryšio dešinę pusę −Ia ∧ b = −IBgauname
− I ′B′ = I(nBn) = nIBn , (4.117)
t. y. sandauga −Ia ∧ b atsispindi pagal (4.97) dėsnį kaip tikras vektorius. Tuotarpu atspindėję vektorinės sandaugosa×b kiekvieną iš vektorių a ir b atskirai,matome, kad ženklas nepakinta. Taigi, geometrinėje algebroje negalima užra-šyti „gudresnio“ vektoriaus, — tokio, kuris atspindėtas nepakeistų savo ženklo.Atspindėtas ženklo nekeičia tik bivektorius (bei kitos lyginio vektorių skaičiausišorinės sandaugos). Todėl tokie fizikiniai dydžiai kaip kampinis greitis, sukimomomentas momentas, magnetinis laukas yra ne vektoriai, o bivektoriai.
Išsiaiškinę, kaip bivektorius elgiasi atspindžio metu, raskime, kaip jis trans-formuojasi posūkio metu. Skaičiuojame visiškai taip pat:
B′ = a′ ∧ b′ = 12
(a′b′ − b′a′
)= 1
2
ÄRaR RbR − RbR RaR
ä
= 12
ÄR(ab− ba)R
ä= R a ∧ b R
= RBR ,(4.118)
kur pasinaudojome savybe RR = 1. Matome, kad sukant bivektoriai transfor-muojasi lygiai pagal tokias pačias taisykles, kaip ir vektoriai. Tuo tarpu pseu-doskaliaro, kadangi jis komutuoja su visais Cl3,0 algebros elementais, sukimaivisiškai nekeičia,
RIR = IRR = I. (4.119)
Sakoma, kad pseudoskaliaras yra invariantiškas sukimų atžvilgiu. Taigi, pavei-kus rotoriumi tiesės pereina į tieses, plokštumos į plokštumas ir t. t. Kadangivisi geometriniai objektai sukami tuo pačiu kampu ir tos pačios plokštumos at-žvilgiu, todėl geometrinius objektus rotoriai suka kaip vieną visumą. Ši svarbirotorių transformacinė savybė geometrinėje algebroje vadinama automorfizmu,kitaip sakant, išlaikančiu pavidalą.
4.9 pavyzdys. Rasime bet kokios plokštumos, užduotos bivektoriumi B, projekciją įkitą plokštumą, kurią nusako 4.9 paveikslo vienetinis vektorius n. Iš brėžinio akivaiz-du, kad tam pakanka paimti pradinę plokšumą ir jos veidrodinį atspindį. Jas sudėję irpadalinę iš dviejų gauname reikalingą atsakymą 1
2 (B + nBn−1).

86 4 skyrius
4.7. Rotoriaus konstravimas
4.10 pav. Vektoriaus a su-kimas į b. Vektorius n yrastatmenas plokštumai, pa-vaizduotai punktyrine linija,ir dalina kampą θ į dvi dalis
Geometrinės algebros objektai sukami juos apgau-biant rotoriumi. Pastarąjį nusako vienetinis bivek-torius B, t. y. plokštuma, kurioje vyksta sukimas,ir kampas θ (tiksliau, pusė kampo), kuriuo norimepasukti. Rotorių dažnai tenka apskaičiuoti žinanttik pradinį a ir galinį b vektorius. Kaip reiktų už-rašyti rotorių tokiu atveju? Tuo tikslu pirmiausiaabu vektorius sunormuokime a = a/|a|, b = b/|b|.Tada suraskime vienetinį vektorių n, nukreiptą pu-siaukampinės tarp a ir b kryptimi, kaip parodyta4.10 paveiksle,
n =a+ b
|a+ b|. (4.120)
Punktyrinė linija vaizduoja n vektoriui statmenąplokštumą, kurios atžvilgiu atspindėję vektorių a
gauname vektorių −b = −nan. Padauginę abi šios formulės puses iš kairės ir išdešinės iš b, randame
b = bnanb . (4.121)
Iš šios išraiškos išplaukia, kad rotorius, kuris a pasuka į b, yra
R = bn = b
(a+ b
|a+ b|
), (4.122)
arba apskaičiavus normą galutinai gauname
R =1 + ba»
2(1 + a · b). (4.123)
Formulė (4.123) leidžia sukonstruoti rotorių, kai žinome vektorius a ir b.Sprendžiant uždavinius patogu rotorius užrašyti eksponentės pavidalu. Jei θ
yra kampas tarp a ir b, t. y. cos θ = a · b, tada rotorių galima užrašyti taip:
R = e± a∧b
|a∧b|
θ2 = cos
θ
2± a ∧ b
|a ∧ b|sin
θ
2. (4.124)
Kai a yra statmenas b, formulė supaprastėja,
R = e±a∧b π/4 = 1√2
Ä1± a ∧ b
ä. (4.125)

Trimatė erdvė. Cl3,0 algebra 87
Matome, kad šiuo atveju ji sutampa su (4.123) formule. Iš čia išplaukia, kadpliuso ženklas reiškia vektoriaus b sukimą link a kampu θ, o minuso ženklas— priešingai. Pritaikius pusės kampo formules cos2(θ/2) = 1
2 (1 + cos θ),
sin2(θ/2) = 12 (1 − cos θ) ir cos θ = a · b, eksponentinis rotoriaus pavida-
las (4.124) virsta (4.123) formule.
4.10 pavyzdys. Rotoriumi (4.123) paveikime kitą vektorių c, statmeną plokštumaia ∧ b. Pasinaudoję vektorių ortogonalumo savybe bac = b(−ca) = cba gauname
Rc =1 + ba»
2(1 + a · b)c = c
1 + ba»2(1 + a · b)
= cR . (4.126)
Iš formulės išplaukia, kadRcR = c , (4.127)
t. y. vektorius c nepasisuka. Taip ir turi būti, nes c yra statmenas sukimo plokštumai.
4.11 pavyzdys. Rotoriumi (4.123) paveikime vektorių a. Turėtume gauti vektorių b.Ypatumas tas, kad a guli sukimo plokštumoje. Gauname
Ra =a + b»
2(1 + a · b)= a
1 + ab»2(1 + a · b)
= aR . (4.128)
Matome, kadb = RaR = R2a = aR2 . (4.129)
Kadangi rotoriaus pavidalas yraR = exp(−Bθ/2), o B2 = (a∧ b)2 = −1, galime rašyti
b = R2a = e−Bθa = aeBθ . (4.130)
Ši sukimo formulė panaši į vektoriaus sukimo kompleksinėje plokštumoje formulę. Jojerotorius nėra suskaidytas į dvi dalis (nėra pusės kampo rotorių). Deja, taip rotorių ga-lima užrašyti tik tada kai transformuojamas vektorius guli sukimo plokštumoje. Norintužrašyti sukimus įvairiose plokštumose eksponentę būtina suskaidyti į dvi dalis.
Trumpai apie sukimus
Vadovėliuose mokoma, kad vektorių a galima pasukti į vektorių a′, jei jį pa-dauginsime iš ortogonalios matricosR: a′ = Ra. Plokštumoje sukimo matricaR priklauso tik nuo vieno sukimo kampo θ. Jei norime matriciniu būdu apra-šyti sukimą trimatėje erdvėje, reikia trijų Eulerio kampų ir trijų matricų. Na,o daugiamatėse erdvėse, kur tenka įvesti daug Eulerio kampų, toks matricinissukimo aprašymas tampa tikru galvos skausmu. Tuo tarpu geometrinė algeb-ra moko, kad, įvedus pusės kampo rotorių, viskas tampa labai paprasta net irdaugiamatėse Euklido bei Minkowskio erdvėse. Geometrinės algebros sukimaitaikomi aviacijoje ir kosmonautikoje.
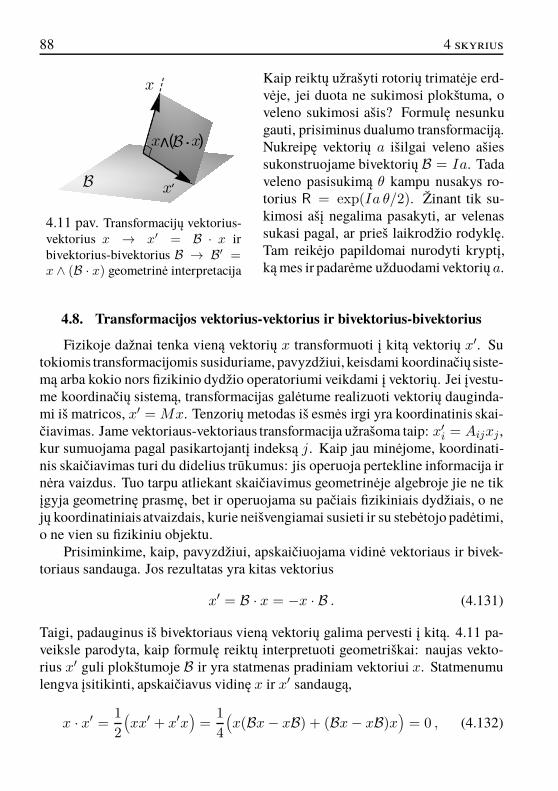
88 4 skyrius
4.11 pav. Transformacijų vektorius-vektorius x → x′ = B · x irbivektorius-bivektorius B → B′ =x ∧ (B · x) geometrinė interpretacija
Kaip reiktų užrašyti rotorių trimatėje erd-vėje, jei duota ne sukimosi plokštuma, oveleno sukimosi ašis? Formulę nesunkugauti, prisiminus dualumo transformaciją.Nukreipę vektorių a išilgai veleno ašiessukonstruojame bivektorių B = Ia. Tadaveleno pasisukimą θ kampu nusakys ro-torius R = exp(Ia θ/2). Žinant tik su-kimosi ašį negalima pasakyti, ar velenassukasi pagal, ar prieš laikrodžio rodyklę.Tam reikėjo papildomai nurodyti kryptį,ką mes ir padarėme užduodami vektorių a.
4.8. Transformacijos vektorius-vektorius ir bivektorius-bivektorius
Fizikoje dažnai tenka vieną vektorių x transformuoti į kitą vektorių x′. Sutokiomis transformacijomis susiduriame, pavyzdžiui, keisdami koordinačiųsiste-mą arba kokio nors fizikinio dydžio operatoriumi veikdami į vektorių. Jei įvestu-me koordinačių sistemą, transformacijas galėtume realizuoti vektorių dauginda-mi iš matricos, x′ =Mx. Tenzorių metodas iš esmės irgi yra koordinatinis skai-čiavimas. Jame vektoriaus-vektoriaus transformacija užrašoma taip: x′i = Aijxj ,kur sumuojama pagal pasikartojantį indeksą j. Kaip jau minėjome, koordinati-nis skaičiavimas turi du didelius trūkumus: jis operuoja pertekline informacija irnėra vaizdus. Tuo tarpu atliekant skaičiavimus geometrinėje algebroje jie ne tikįgyja geometrinę prasmę, bet ir operuojama su pačiais fizikiniais dydžiais, o nejų koordinatiniaisatvaizdais, kurie neišvengiamai susieti ir su stebėtojo padėtimi,o ne vien su fizikiniu objektu.
Prisiminkime, kaip, pavyzdžiui, apskaičiuojama vidinė vektoriaus ir bivek-toriaus sandauga. Jos rezultatas yra kitas vektorius
x′ = B · x = −x · B . (4.131)
Taigi, padauginus iš bivektoriaus vieną vektorių galima pervesti į kitą. 4.11 pa-veiksle parodyta, kaip formulę reiktų interpretuoti geometriškai: naujas vekto-rius x′ guli plokštumoje B ir yra statmenas pradiniam vektoriui x. Statmenumulengva įsitikinti, apskaičiavus vidinę x ir x′ sandaugą,
x · x′ = 1
2
Äxx′ + x′x
ä=
1
4
Äx(Bx− xB) + (Bx− xB)x
ä= 0 , (4.132)

Trimatė erdvė. Cl3,0 algebra 89
ir prisiminus, kad bet kokio vektoriaus kvadratas yra skaliaras. Tai, kad x′ guliB plokštumoje, matome apskaičiavę išorinę transformuoto vektoriaus ir bivekto-riaus sandaugą
x′ ∧ B =1
4
Ä(Bx− xB)B + B(Bx − xB)
ä= 0 , (4.133)
nes B2 taip pat yra skaliaras, kuo visai nesunku įsitikinti pritaikius, pavyzdžiui,dualizacijos metodą. Jei pradinį vektorių x paimsime statmeną plokštumai B,t.y. B · x = 0, galėsime surasti be galo daug vektorių x′, statmenų x. Tai atitiktųhomogeninę matricinę lygtįMx = 0, turinčią be galo daug sprendinių.
Dabar sukonstruokime transformaciją, kuri bivektorių atvaizduotų į kitą bi-vektorių. Ją užrašyti visai nesunku. Iš tiesų, kadangi B · x yra vektorius, taisandauga x ∧ (B · x), kaip tai parodyta 4.11 paveiksle, yra bivektorius. Taigi,tiesinė transformacija, vieną bivektorių pervedanti į kitą, yra
B′ = x ∧ (B · x) = (x · B) ∧ x . (4.134)
Tenzoriniame skaičiavime tokią transformaciją aprašo labai sudėtingas keturiųindeksų tenzorius, B′
ij = TijklBkl, kurį matriciniu pavidalu užrašyti ne taip pa-prasta. Tuo tarpu geometrinės algebros metodu vieną orientuotą plokštumą ga-lime transformuoti į kitą paprastai ir vaizdžiai: trimatėje erdvėje tam užtenkasurasti tinkamai orientuotą ir reikalingo ilgio vektorių x.
Transformacijų tenzoriai dažnai tenkina tam tikras simetrijos savybes. Šiossavybės slepiasi ir formulėje (4.134). Jas pastebėsime, jei pasinaudosime geo-metrinės algebros taisyklėmis, kurios leidžia formulę pertvarkyti įvairiais pavi-dalais, pavyzdžiui,
x ∧ (B · x) = −x ∧ (x · B) = −(B · x) ∧ x = (x · B) ∧ x . (4.135)
Taigi, sukonstravome tiesinę bivektorinę funkciją B′ = F(B), kuri bivektorių Bperveda į kitą bivektoriųB′. O kas atsitiks, jei vektorių x „paguldysime“ plokštu-mojeB? Iš 4.11 brėžinio matyti, kad tada ir bivektoriausB′ plokštuma „atsiguls“ant B. Jei B užrašysime kaip B = x∧ b, kur b yra koks nors fiksuotas vektorius,tuo nesunkiai įsitikinsime, atlikę paprastus apskaičiavimus,
B′ = x∧ (B ·x) = x∧ (x∧ b) ·x = x∧ (x(b ·x)− b(x ·x)) = −x2B . (4.136)
Matome, kad abu bivektoriai skiriasi tik skaliaru. Tokiu atveju sakoma, kadbivektorinė funkcija (4.136) turi tikrinį bivektorių B, kurį atitinka tikrinė ver-tė −x2. Egzistuoja ir kitokio pavidalo multivektorinės funkcijos, nekeičiančiosbivektoriaus plokštumos. Transformacijos atžvilgiu tokias plokštumas vadinsi-me tikrinėmis plokštumomis (tikriniais multivektoriais), o pasirodžiusį skaliarinįdaugiklį — tikrine verte.
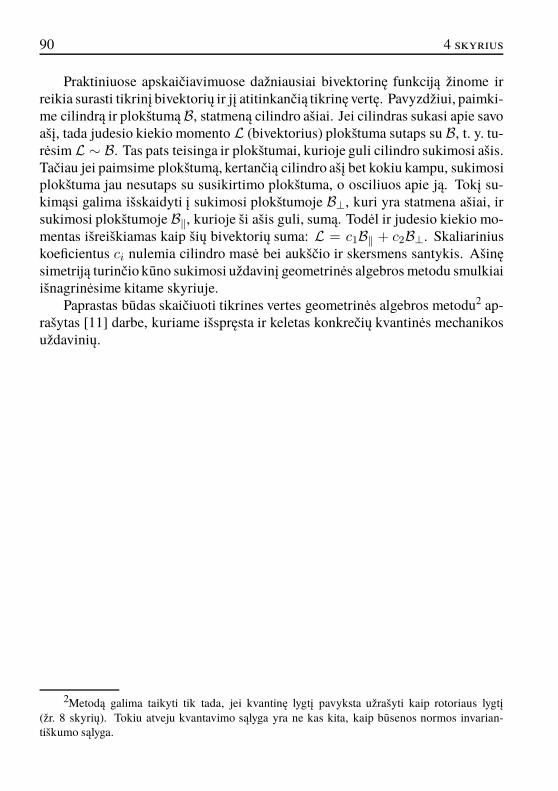
90 4 skyrius
Praktiniuose apskaičiavimuose dažniausiai bivektorinę funkciją žinome irreikia surasti tikrinį bivektorių ir jį atitinkančią tikrinę vertę. Pavyzdžiui, paimki-me cilindrą ir plokštumąB, statmeną cilindro ašiai. Jei cilindras sukasi apie savoašį, tada judesio kiekio momento L (bivektorius) plokštuma sutaps su B, t. y. tu-rėsim L ∼ B. Tas pats teisinga ir plokštumai, kurioje guli cilindro sukimosi ašis.Tačiau jei paimsime plokštumą, kertančią cilindro ašį bet kokiu kampu, sukimosiplokštuma jau nesutaps su susikirtimo plokštuma, o osciliuos apie ją. Tokį su-kimąsi galima išskaidyti į sukimosi plokštumoje B⊥, kuri yra statmena ašiai, irsukimosi plokštumoje B‖, kurioje ši ašis guli, sumą. Todėl ir judesio kiekio mo-mentas išreiškiamas kaip šių bivektorių suma: L = c1B‖ + c2B⊥. Skaliariniuskoeficientus ci nulemia cilindro masė bei aukščio ir skersmens santykis. Ašinęsimetriją turinčio kūno sukimosi uždavinį geometrinės algebros metodu smulkiaiišnagrinėsime kitame skyriuje.
Paprastas būdas skaičiuoti tikrines vertes geometrinės algebros metodu2 ap-rašytas [11] darbe, kuriame išspręsta ir keletas konkrečių kvantinės mechanikosuždavinių.
2Metodą galima taikyti tik tada, jei kvantinę lygtį pavyksta užrašyti kaip rotoriaus lygtį(žr. 8 skyrių). Tokiu atveju kvantavimo sąlyga yra ne kas kita, kaip būsenos normos invarian-tiškumo sąlyga.

5. Klasikinė mechanika. Trajektorijos ir sukimai
Apie geometrinę algebrą jau žinome pakankamai daug, todėl galime pradė-ti spręsti ganėtinai sudėtingus dinamikos uždavinius. Kadangi klasikinėje me-chanikoje kūnai juda trajektorijomis, pirmiausia susipažinsime, kaip trajektori-jos aprašomos geometrinėje algebroje. Vėliau aptarsime jėgas ir kūnų dinamikącentrinių jėgų lauke. Šiame ir kituose geometrinės algebros taikymams skirtuo-se skyriuose vektorių ir kitų fizikinių dydžių žymėjimą derinome prie aptariamokonteksto, todėl bendrose formulėse vektorius, kaip ir anksčiau, žymėsime pa-prastomis lotyniškomis raidėmis, tačiau kalbėdami apie fizikinių dydžių vekto-rius 2D ir 3D erdvėse, kaip įprasta vadovėliuose, juos paryškinsime.
5.1. Tiesės, plokštumos, sferos ir antros eilės paviršiai
5.1.1. Tiesės. Lygiagrečią vektoriui b tiesę, einančią per spinduliu-vektoriu-mi a užduotą tašką, aprašo geometrinės algebros lygtis (žr. 5.1a paveikslą)
(x− a) ∧ b = 0. (5.1)
Vektorius (x−a) gali būti nukreiptas ta pačia arba priešinga vektoriui b kryptimi.Lygtis (5.1) yra ne kas kita, kaip dviejų vektorių lygiagretumo sąlyga.
Jei žinome, kad tiesė eina per du taškus, kurių spinduliai-vektoriai yra a ir b,iš (5.1) nesunku gauti kitą lygtį:
(x− a) ∧ (b− a) = 0. (5.2)
Lygtyje (5.2) išskleidę narius ir abi puses padalinę iš 2, turime
1
2a ∧ b = 1
2a ∧ x+
1
2x ∧ b . (5.3)
Iš 5.1b pav. matome, kad bivektorius 12a ∧ b nusako orientuoto trikampio plotą.
Šis plotas lygus kitų dviejų trikampių plotų, nusakomų atitinkamai bivektoriaisA ir B, sumai, A+ B = 1
2a ∧ x+ 12x∧ b. Kintant spinduliui-vektoriui x taškas
slenka trikampio kraštine, kuri ir vaizduoja mūsų tiesę. Kadangi plotai orien-tuoti, tai praėjus vieną iš trikampio viršūnės taškų a arba b, vietoje plotų sumos
91

92 5 skyrius
a) b)
5.1 pav. a) Tiesė, nusakoma lygtimi (x− a)∧ b = 0. b) Kai vektoriaus x galasguli ant tiesės, trikampio plotas 1
2a ∧ b yra trikampių plotų suma A + B
automatiškai gausime plotų skirtumą, o lygybė išliks teisinga. Abi (5.3) lygtiespuses padauginę iš x gauname
a ∧ b ∧ x = 0 . (5.4)
Taip ir turi būti, nes visi trys vektoriai guli vienoje plokštumoje.Jei trikampių plotų bivektorius išreikšime per vienetinį plokštumos bivekto-
rių eab, kuriam e2ab = −1,
A =1
2a ∧ x = |A|eab , B =
1
2x ∧ b = |B|eab , (5.5)
tai, kaip netrukus parodysime, galime užrašyti tokią lygtį:
(A+ B)x−Aa −Bb = 0. (5.6)
Ją nesunku išvesti iš Jacobio tapatybės, kurią dabar trumpai ir aptarsim. Kaip jaužinome, geometrinė ir išorinė sandaugos yra asociatyvios, ko negalima pasakytiapie vidinę sandaugą arba tradicinę vektorinę sandaugą, kur (a× b)× c 6= a×(b × c). Tačiau neasociatyviose algebrose kai kada egzistuoja būdas veiksmųeiliškumui sukeisti. Tai atliekama pasinaudojus taip vadinama Jacobio tapatybe.Tradicinėje vektorinėje sandaugoje tas būdas paremtas antisimetriškumo savybe,a× b = −b× a. Ja pasinaudojus galima gauti Jacobio tapatybę
(a× b)× x + (x× a)× b+ (b× x)× a = 0, (5.7)
iš kurios išplaukia, kad nurodyta tvarka antisimetrizuojant trijų narių sandaugas,kuriose daugikliai cikliškai sukeisti vietomis, ir jas sudedant, visada gaunamenulį. Vektorinės sandaugos atveju tapatybę (5.7) lengviausia patikrinti tiesiogišreiškus dvigubas vektorines sandaugas skaliarinėmis sandaugomis, (a× b)×x = b(a x)− a(b x).
Kaip reiktų užrašyti šią tapatybę geometrinės algebros vidinei sandaugai, ku-ri taip pat yra neasociatyvi? Tai bus nesunku padaryti, jei prisiminsime, kad

Klasikinė mechanika. Trajektorijos ir sukimai 93
geometrinėje algebroje antisimetriškumu pasižymi dviejų vektorių išorinė san-dauga a∧b ir vektoriaus bei bivektoriaus vidinė sandaugaB ·a. Todėl jei tapaty-bėje (5.7) skliaustuose esančias išraiškas pakeisime išorinėmis sandaugomis (josduoda bivektorius), o likusią sandaugą — vidine vektoriaus bei bivektoriaus san-dauga, tai antisimetriškumo savybė išliks. Taigi, geometrinės algebros vidineisandaugai Jacobio tapatybė yra
(a ∧ b) · x+ (x∧ a) · b+ (b ∧ x) · a = 0 . (5.8)
Kadangi mūsų nagrinėjamu atveju visi trys vektoriai dar guli ir vienoje plokštu-moje, a ∧ b ∧ x = 0, tai vidinę sandaugą galima pakeisti geometrine:
(a ∧ b)x+ (x ∧ a)b+ (b ∧ x)a = 0 . (5.9)
Pirmam nariui pritaikę (5.3) formulę, o tada visas išorines sandaugaspakeitę (5.5)plotais ir gauname (5.6) lygtį. Ją išsprendę x atžvilgiu, randame
x = (A+ B)−1(Aa + Bb) . (5.10)
Kadangi trikampiai A ir B guli vienoje plokštumoje, o e−1ab eab = 1, formulę
galima perrašyti tik per bivektorių dydžius:
x =|A|a+ |B|b|A|+ |B| . (5.11)
Šis rezultatas visiškai sutampa su vektoriaus skleidinio bazėje, formulė (1.25),gauta formuluojant ir sprendžiant uždavinį visai kitu būdu. Tai rodo, kad tas patsobjektas, šiuo atveju tiesė, gali būti nusakytas įvairiai. Toks daugiareikšmis geo-metrinio objekto įsivaizdavimas būdingas ne tik tiesei. Pavyzdžiui, apskritiminęorbitą trimatėje erdvėje galima pavaizduoti kaip sferos ir plokštumos susikirtimą,kaip kūgio ir plokštumos susikirtimą, arba kaip dviejų sferų susikirtimą.
5.1.2. Plokštumos. Plokštumą geometrinėje algebroje galime aprašyti ta pa-čia lygtimi kaip ir tiesę. Tik (5.1) formulėje tiesės kryptį apibrėžiantį vienetinįvektorių b reikia pakeisti plokštumos padėtį erdvėje nusakančiu vienetiniu bivek-toriumi B. Todėl jei x yra esančio ant plokštumos taško spindulys-vektorius, taiper tašką a einančią plokštumą aprašo lygtis
(x− a) ∧ B = 0 , kur B2 = −1 . (5.12)

94 5 skyrius
Trajektorija Formulė Ekscentricitetas Energija
Apskritimas x2 + y2 = r2 e = 0 E < 0
Elipsė x2
a2+ y2
b2= 1 0 < e < 1 e =
√1−Äba
ä2E < 0
Hiperbolė x2
a2 − y2
b2 = 1 e > 1 e =√1 +Äba
ä2E > 0
Parabolė y2 = 2px e = 1 E = 0
5.1 lentelė. Trajektorijų klasifikacija Keplerio uždavinyje. Uždaromis orbito-mis judančių dalelių energija yra neigiama
5.1.3. Sferos, apskritimai. Sferą, kurios spindulys |r| ir kurios centras yrataške c, nusako taškų x aibė, tenkinanti iš geometrijos kurso gerai žinomą lygtį
(x− c)2 = r2. (5.13)
Prie jos dar būtų galima pridėti sąlygą (x − c) ∧ I = 0, nurodančią, kad sferapriklausoR3 erdvei. Sferos didįjį apskritimą rasime, jei užrašysime sferos centrąkertančią plokštumos lygtį,
(x− c) ∧ B = 0 , (5.14)
ir ją išspręsimekartu su sferos (5.13) lygtimi. Kaip tai padaryti, aprašyta D. Heste-nes knygoje [12]. Mūsų tikslas buvo šiais keliais pavyzdžiais pademonstruoti,kad pasitelkus geometrinę algebrą įvairių geometrinių objektų lygtys ir sąryšiaitarp jų gali būti išreikšti labai kompaktiškai. Dabar geometrinės algebros me-todais suklasifikuosime antros eilės kreives (trajektorijas) R3 erdvėje. Jos labaisvarbios fizikams, nes tokiomis trajektorijomis dažnai juda dalelės.
5.1.4. Kūginiai pjūviai. Plokštumos ir kūginio paviršiaus susikirtimo lini-ja yra kreivė. Jos pavidalą lemia kampas, kurį sudaro plokštuma ir kūgio ašis.Taip gaunamos keturių rūšių kreivės — apskritimas, elipsė, hiperbolė ir parabolė.Polinėje koordinačių sistemoje (r, θ), kur raidės r ir θ žymi koordinačių sandus,visas šias kreives nusako viena ir ta pati lygtis
r(θ) =p
1 + e cos θ. (5.15)
Šioje formulėje matematinėje literatūroje įprastais simboliais pažymėjome duskaliarus: p — kreivės židinio parametrą ir e — ekscentricitetą. Kreivės tipąapsprendžia ekscentricitetas, žr. 5.1 lentelę. Jei e = 0, kreivė yra apskritimas,kai 0 < e < 1 — elipsė, paėmę e = 1 gauname parabolę, o kai e > 1 —hiperbolę. Geometrinėje algebroje (5.15) lygtį apibendrina [12] formulė
r =p
1 + e · r . (5.16)

Klasikinė mechanika. Trajektorijos ir sukimai 95
a)
5.2 pav. Kūgio pjūviai ir jų vektoriniųekscent-ricitetų e kryptys. a) Elipsė: r1 + r2 = λe,|r1| + |r2| = const, λ = 2
√a2 − b2. b) Hi-
perbolė: r1 + r2 = λe, |r1| − |r2| = const,λ = 2
√a2 + b2. c) Parabolė: λ(r1 +r2) · e =
1, |r1| = |r2|, λ = 2p. Raidės F žymi židi-nius, tarp kurių atstumas λ = 2|e|. Horizontalitiesė, pažymėta raide d, yra direktrisė1.
b)
c)
Joje skaliarinis ekscentricitetas e yra pakeistas vektoriumi e, kurio projekcija įtrajektorijos spindulio-vektoriaus kryptį r yra e cos θ. Antros eilės paviršiai tuo-met gaunami sukant atitikamą kreivę apie ekscentriciteto vektorių e, o įprasti-nį (5.15) pavidalą gauname (5.16) lygtyje išreikštai apskaičiavę vidinę sandaugąe · r = e cos θ. Antros eilės kreivės ir jų vektorinių ekscentricitetų kryptys pa-vaizduotos 5.2 paveiksle. Vadovėliuose šių kreivių savybės paprastai nagrinėja-mos pasitelkus x–y koordinačių sistemą (5.1 lentelėje antras stulpelis). Tačiau iš5.1 lentelės ir 5.2 paveikslo aiškiai matome, kad bekoordinatinėje geometrinėjealgebroje tikrasis matematinis objektas, nusakantis visas antrosios eilės kreives,yra vektorinis ekscentricitetas e.
5.2. Multivektorių priklausomybė nuo parametro (laiko)
Fizikiniai dydžiai dažnai priklauso nuo laiko t, kuris klasikinėje mechanikojeyra nepriklausomas kintamasis (skaliaras). Geometrinėje algebroje multivekto-riai gali būti laiko funkcijos, t. y. kiekvieną parametro vertę t0, t1, t2, . . . galiatitikti multivektoriaus vertės M0 = M(t0), M1 = M(t1), M2 = M(t2) ir t. t.Tokiu atveju rašysime M(t), nenurodydami konkretaus laiko momento. Sakoma,
1Parabolė apibrėžiama kaip kreivė, kuriai atstumo nuo direktrisės iki parabolės taško ir atstu-mo nuo parabolės židinio iki to pačio parabolės taško skirtumas nesikeičia, t. y. |r1| = |r2|.

96 5 skyrius
5.3 pav. Vektoriaus x(t) išvestinėx(t0) =(dx(t)/dt)t→t0 momentu t0
kad multivektorius laiko momentu t0 yra to-lydus, jei
limt→t0
M(t) = M(t0) (5.17)
irlimt→t0
|M(t)−M(t0)| = 0 . (5.18)
Kitaip tariant, kai parametro vertė artėjaprie t0, multivektoriaus vertė artėja prieM(t0) taip, kad multivektorių dydžių (mo-dulių) skirtumas irgi artėja prie nulio.
Multivektorių M ir N suma yra tolydi, jei
limt→t0
ÄM(t) + N(t)
ä= lim
t→t0M(t) + lim
t→t0N(t), (5.19)
o jų nekomutatyvi sandauga tolydi, kai
limt→t0
ÄM(t)N(t)
ä=Älimt→t0
M(t)äÄ
limt→t0
N(t)ä. (5.20)
Suprantama, kad multivektoriaus tolydumo savybės galioja ir kiekvienam multi-vektoriaus k-jam rangui 〈M(t)〉k atskirai.
Multivektoriaus išvestinę laiko atžvilgiu t0 momentu žymėsime M = M(t0)arba dM(t0)/dt ir suprasime kaip ribą
M(t0) =dM(t0)
dt≡ lim
∆t→0
M(t0 +∆t)−M(t0)
∆t. (5.21)
Tokią išvestinę vadinsime multivektoriaus skaliarine išvestine. Akivaizdu, kad(5.21) formulė multivektoriaus išvestinę apibrėžia atskirai kiekvienam multivek-toriaus k-jam rangui 〈M(t)〉k. Kitame skyriuje apibrėšime ir multivektoriausišvestinę kito vektoriaus atžvilgiu.
Dabar pasidomėkime bendro pobūdžio trajektorijomis, t. y. kreivėmis x(t),kurias laikui bėgant brėžia vektoriaus galas. Skaliarinė trajektorijos išvestinėv ≡x = x(t) yra vektorius, kuris vadinamas greičiu:
v = x = lim∆t→0
∆x
∆t=
dx(t)
dt. (5.22)
5.3 pav. iliustruoja tokios išvestinės geometrinę prasmę. Iš brėžinio matome, kadvektorių x ir v kryptys nesutampa. Kadangi v = |v|v, išvestinė keičiasi keičiantgreičio dydį |v| ir/arba jo kryptį v. Jei laikui bėgant greitis kinta, apskaičiavęgreičio išvestinę pagal laiką randame pagreitį v. Kai keičiasi tik greičio kryp-tis, bet ne jo dydis, pavyzdžiui, kai materialusis taškas sukasi pastoviu kampiniu

Klasikinė mechanika. Trajektorijos ir sukimai 97
greičiu, greičio ir pagreičio vektoriai yra ortogonalūs
v · v = 0 . (5.23)
Užrašyta per geometrinę sandaugą ši sąlyga atrodo taip:
vv = −vv . (5.24)
Kita vertus, jei keičiasi tik greičio dydis, bet ne jo kryptis, greičio ir pagreičiovektoriai išlieka lygiagretūs ir galime rašyti
d|v|2dt
= 2|v| ˙|v|= 2vv = 2vv . (5.25)
Apibendrinant galima teigti, kad multivektorių sandaugos išvestinė paramet-ro atžvilgiu skaičiuojama pagal paprastą funkcijų sandaugos diferencijavimo tai-syklę, tik reikia atsižvelgti, kad daugikliai dabar nekomutuoja. Pavyzdžiui, mul-tivektoriaus kvadrato išvestinė M2 = MM skaičiuojama taip:
dM2
dt= MM+MM . (5.26)
Ta pati taisyklė galioja ir išorinei bei vidinei sandaugoms:
d
dt(a ∧ b) = a ∧ b+ a ∧ b, d
dt(a · b) = a · b+ a · b . (5.27)
Paeiliui diferencijuojant multivektoriaus laipsnius nesunku išvesti bendrą formu-lę
dMk
dt= MMk−1 +MMMk−2 + · · ·+Mk−1M , (5.28)
todėl diferencijuojant multivektorių pagal parametrą jo rangas nepasikeičia:
d
dt〈M〉k = 〈M〉k . (5.29)
Tai dera su išvestinės apibrėžimo formule (5.21). Lengvai apibrėžiama ir atvirkš-tinė diferencijavimui operacija — integravimas pagal skaliarą. Pavyzdžiui, iš-skleidus eilute lengva patikrinti, kad multivektorinės diferencialinės lygties
M(t) = αM(t) , (5.30)
sprendinys yraM(t) = eαtM0. (5.31)
Čia M0 yra multivektorius pradiniu laiko momentu, o α yra nepriklausantis nuolaiko skaliaras. Formulė (5.31) išlieka teisinga ir konstantą α pakeitus nuo laikonepriklausančiu multivektoriumiA. Tokiu atveju eksponentę eAt į kitą multivek-toriaus M0 pusę galėsime perkelti tik atsižvelgę į M0 ir A komutavimo taisykles.

98 5 skyrius
5.3. Jėgos klasikinėje mechanikoje
Klasikinė mechanika nagrinėja materialiųjų kūnų judėjimą erdvėje. Teorijasantykinai skirstoma į dvi dalis: kinematiką ir dinamiką. Kinematika gilinasi tikį paties judėjimo aprašymą, o dinamika nagrinėja judėjimo priežastis ir aiškinakaip jį valdyti (kinematika + jėga = dinamika).
Tegu dalelės trajektoriją erdvėje nusako nuo laiko priklausantis spindulys-vektorius x(t), užduotas taško O, vadinamo koordinačių pradžia, atžvilgiu. Šiovektoriaus išvestinė pagal skaliarinį parametrą t yra dalelės greitis (5.22), kurisapibūdina, kaip sparčiai keičiasi dalelės padėtis judant vektoriausx(t) galui krei-ve (žr. 5.3 pav.). Pasirinkę ortogonalią ir laike nekintančią bazę greičio vektoriųišskaidome į sandus:
v(t) =d
dt
(x1(t)e1 + x2(t)e2 + x3(t)e3
)
=d
dtx1(t)e1 +
d
dtx2(t)e2 +
d
dtx3(t)e3
= v1(t)e1 + v2(t)e2 + v3(t)e3 .
(5.32)
Jei greičio kryptis išlieka pastovi, o keičiasi tik jo dydis (skaliaras), jo kitimąnusako formulė
v(t) =»v(t) · v(t) . (5.33)
Pavyzdžiui, dalelės, kurios masėm, kinetinė energijaEk (skaliaras) priklauso tiknuo greičio modulio v(t),
Ek(t) =m
2v(t)2 =
m
2v(t)2 . (5.34)
Panašiai kaip greitis apibrėžiamas ir dalelės pagreitis:
a(t) =d
dtv(t) =
d2
dt2x(t) . (5.35)
Dar aukštesnių koordinatės išvestinių apibrėžti nėra reikalo, nes klasikinėje me-chanikoje diferencialinės lygtys yra antros eilės. Taigi, kaip ir senajame vektori-niame skaičiavime, geometrinėje algebroje dalelės koordinatė, greitis ir pagreitisyra vektoriai. Skirtumas tas, kad baziniai vektoriai (koordinatinės ašys) ei, kuriųatžvilgiu vektorius išskaidomas į sandus, geometrinėje algebroje antikomutuo-ja. Tuo tarpu standartiniame vektoriniame skaičiavime koordinačių ortų i, j ir ksandauga, taigi, ir komutacija, apskritai neapibrėžta.
Pirmasis Newtono dėsnis teigia, kad dalelė, kurios neveikia jokios jėgos, yrarimties būsenos arba juda pastoviu greičiu. Čia suprantama, kad pastovus išlie-ka tiek greičio modulis, tiek ir jo kryptis. Todėl geometrinėje algebroje pirmąjį

Klasikinė mechanika. Trajektorijos ir sukimai 99
Newtono dėsnį aprašo vektorinė formulė
d
dtx(t) = c , (5.36)
kur c yra pastovus vektorius. Užrašę šią lygtį pasirinktoje bazėje gautume trispirmos eilės diferencialines lygtis sandams.
Antrasis Newtono dėsnis nusako, kaip dalelė elgiasi veikiant išorinei jėgai.Jis teigia, kad dalelės pagreitis yra proporcingas dalelę veikiančiai jėgai F ,
ma = F . (5.37)
Čia proporcingumo konstantam vadinama dalelės inertine mase. Bendruoju at-veju jėgos dydis ir kryptis gali priklausyti nuo laiko, koordinatės ir net dalelėsgreičio. Todėl diferencialine forma antrąjį Newtono dėsnį užrašysim pavidalu
mx = F (x, x, t) . (5.38)
Dešinėje (5.38) lygties pusėje esanti jėga yra vektorius, kurios prigimtis gali būtipati įvairiausia. Pavyzdžiui, gravitacinė jėga, kuri veikia tarp dviejų r atstumuvienas nuo kito nutolusių kūnų, kurių masės yra m ir M , veikia išilgai tų kūnųmasių centrus jungiančios tiesės:
F = −mMGr
|r|3 . (5.39)
Tai Newtono nustatytas gravitacijos dėsnis. Kaip matome, jėgos dydis yra at-virkščiai proporcingas atstumo tarp dalelių kvadratui
∣∣∣ r
|r|3∣∣∣ = 1
|r|2 , t. y. jėga yranetiesinė. Geometrinėje algebroje formulė (5.39) nesikeičia.
Kietuose kūnuose nuo pusiausvyros nukrypusius atomus į pusiausvyros pa-dėtį grąžina jėga, proporcinga nuokrypio vektoriui x,
F = −kx . (5.40)
Skaliarinis koeficientas k vadinamas tamprumo koeficientu. Ši formulė vadina-ma Hooke’o dėsniu. Ji taikoma, pavyzdžiui, sklindančioms kietuose kūnuoseakustinėms bangoms aprašyti. Geometrinėje algebroje (5.40) dėsnio pavidalasirgi išlieka nepakitęs. Dabar prisiminsime gerai žinomą jėgą, kuri geometrinėjealgebroje užrašoma kiek kitaip negu esame įpratę matyti.
Greičiu v judančią įelektrintą dalelę, kurios krūvis q (pavyzdžiui, lekiantįklasikinį elektroną), veikia Lorentzo jėga. Vadovėliuose ji užrašoma pavidalu
F = q(E + v ×B) , (5.41)
kur ženklas × žymi vektorinę sandaugą, o E ir B yra elektrinio lauko ir mag-netinės indukcijos vektoriai. Matome, kad Lorentzo jėga priklauso nuo dalelės

100 5 skyrius
judėjimo greičio v. Jei pasinaudosim (4.12) formule ir vektorinę sandaugą pa-keisim išorine sandauga, gausime
F = q(E − Iv ∧B) . (5.42)
Šioje formulėje tiek elektrinisE laukas, tiek magnetinėB indukcija dar yra trak-tuojami kaip vektoriai, todėl dydis −Iv ∧ B yra vektorius. Taigi, tiek kairėje,tiek ir dešinėje Lorentzo jėgos pusėje stovi vektoriai. Narį su magnetine induk-cija galime perrašyti kitaip: −I(v ∧ B) = −I(vB − Bv)/2 =
Äv(−IB) −
(−IB)vä¿
2 = v · (−IB). Bet dydis IB yra bivektorius, B = IB. Būtentjį toliau (jei nepasakyta kitaip) ir traktuosime kaip magnetinę indukciją. Tokiubūdu Lorentzo jėga geometrinės algebros žymėjimais yra
F = qÄE + 1
2(−vB + Bv)ä= q(E − v · B) . (5.43)
Ši Lorentzo jėgos išraiška teisinga tiek, kiek teisinga ir visa Newtono mechanika,t. y. tol, kol dalelė juda greičiu, daug mažesniu už šviesos greitį |v| ≪ c. Tiesa,reliatyvumo teorijoje magnetinė indukcija taip pat išlieka bivektoriumi. Tik tenjis yra ne Cl3,0, o didesnės Cl1,3 algebros bivektorius (žr. 9 skyrių).
5.4. Sviedinio trajektorija
Diferencialinė lygtis su Newtono jėga (5.39) yra netiesinė. Tačiau gravitaci-nės jėgos veikiamo kūno judėjimą mažais atstumais ties Žemės paviršiumi geraiaprašo daug paprastesnė tiesinė lygtis
v = −g , (5.44)
kur vektorių g = ge2 nukreipėme statmenai Žemės paviršiui. Konstanta g atsi-žvelgia į gravitacinio lauko stiprumą ties Žemės paviršiumi. Pridėjus dar vienąnarį galima įskaityti ir oro pasipriešinimopoveikį. Matavimai rodo, kad oro pasi-priešinimo įtaka didėjant greičiui v auga netiesiškai. Tačiau kol greitis nedidelis,pasipriešinimas yra apytiksliai proporcingas kūno greičiui ir nepriklauso nuo kū-no formos. Jei pridėsime šį narį, judėjimo lygtis vis dar išliks tiesinė, todėl buslengvai išsprendžiama,
v = −g − γv . (5.45)
Pastovioji γ charakterizuoja oro pasipriešinimo stiprumą. Atkreipsime dėme-sį, kad vektoriai g ir v nėra lygiagretūs. Užrašytą judėjimo lygtį bus nesunkuišspręsti, jei pastebėsim, kad išdiferencijavus eksponentę d
dt(veγt) gauname du
(5.45) lygties narius:d
dt(veγt) = eγt(v + γv) . (5.46)

Klasikinė mechanika. Trajektorijos ir sukimai 101
5.4 pav. Sviedinio trajektorijos, kaioro pasipriešinimo γ vertės skirtin-gos, o pradiniai greičiai vienodi. Kaiγ = 0, trajektorija yra parabolė
Tai leidžia (5.45) lygtį perrašyti pavidalud
dt(veγt) = −geγt , (5.47)
iš kurio lengva apskaičiuoti greitį
v(t)eγt = −ˆ t
0geγtdt+ v0
= −g(eγt − 1)
γ+ v0 ,
(5.48)
kur v0 pažymėjome pradinį dalelės greitį.Supaprastinę turime,
v(t) = −g(1− e−γt)
γ+ v0e
−γt . (5.49)
Iš atsakymo matyti, kad laikui bėgant dėl oro pasipriešinimo greičio vektoriustrumpėja. Kaip laikui bėgant kinta dalelės koordinatė, sužinosime dar kartą su-integravę (5.49) sprendinį:
r(t) ≡ x− x0 = −g(e−γt + γt− 1)
γ2+ v0
(1− e−γt)γ
. (5.50)
Keletą r(t) = r1(t)e1 + r2(t)e2 trajektorijų su skirtingomis oro pasipriešinimokoeficiento reikšmėmis pavaizdavome 5.4 paveiksle.
5.5. Elektronas magnetiniame lauke
Kai elektrinio lauko nėra, judančią įelektrintą dalelę veikia tik magnetinislaukas. Lorentzo jėgos išraiška (5.43) tada kiek supaprastėja, o dalelės judėjimolygtis įgyja pavidalą
v = v · Ω , (5.51)
kur raide Ω = (q/m)B pažymėjome ciklotroninį dažnį (laikome, kad q < 0).Kaip ir magnetinė indukcija, ciklotroninis dažnis Ω yra bivektorius. Tai svarbuprisiminti apskaičiuojant vidines ir išorines sandaugas. Kadangi
v · (v · Ω) = v · (vΩ−Ωv)/2
= v(vΩ− Ωv) + (vΩ− Ωv)v = 0 ,(5.52)
tai dešinę lygties (5.51) pusę padauginę iš v gausime nulį:
v · v = 0. (5.53)
Tai reiškia, kad bet kuriuo laiko momentu greičio v ir pagreičio v vektoriai yravienas kitam statmeni.

102 5 skyrius
5.5 pav. Greičio vektoriaus v0 pre-cesija aplink bivektoriuiΩ statmenągreičio sandą
Judėjimo lygtį (5.51) bus paprasčiauspręsti, jei vidinę sandaugą pakeisime geo-metrine sandauga, kuri turi atvirkštinę ope-raciją:
v +Ä12Ωäv + v
Ä− 1
2Ωä= 0. (5.54)
Dabar paimkime multivektorių R ≡ R(t),kuris tenkintų multivektorinę diferencialinęlygtį
R =1
2RΩ . (5.55)
Pritaikykime abiem šios lygties pusėm ap-grąžos operaciją. Kadangi apgrąžos operacija veikdama į bivektorių pakeičia tikjo ženklą Ω = −Ω, turime
˙R = −1
2ΩR . (5.56)
Abiejų šių diferencialinių lygčių sprendiniai yra eksponentės (kaip (5.31) formu-lėje)
R = eΩt/2, R = e−Ωt/2 . (5.57)
Tokiu būduR yra kairysis, o R dešinysis integruojantis daugiklis. Manysime, kadpradiniu laiko momentu jie yra lygūs nuliui,R(0) = R(0) = 0. Padauginę (5.54)lygtį iš kairės iš R, o iš dešinės iš R bei pasinaudoję (5.55) ir (5.56) lygybėmis,gauname
RvR+ RvR+ Rv˙R = 0 (5.58)
arbad
dt(RvR) = 0. (5.59)
Kadangi pilna reiškinio išvestinė lygi nuliui bet kuriuo laiko momentu, diferen-cialinės lygties (5.59) sprendinys yra
RvR = v0 , (5.60)
kur v0 žymi dalelės greitį pradiniu laiko momentu. Pasinaudoję savybe RR = 1,iš šios lygties randame tokį (5.51) diferencialinės lygties sprendinį:
v = Rv0R = e−Ωt/2v0eΩt/2. (5.61)
Palyginę jį su (4.106) išraiška, matome, kad gauta formulė aprašo greičiovektoriaus v sukimąsi kampiniu dažniu Ω, kaip pavaizduota 5.5 paveiksle.

Klasikinė mechanika. Trajektorijos ir sukimai 103
Norėdami geriau suprasti (5.61) lygtį, suskaidykimegreičio vektorių į du san-dus: lygiagretų ir statmeną magnetinio bivektoriaus plokštumai B = (m/q)Ω,
v = v‖ + v⊥ . (5.62)
Kadangi ciklotroninio dažnio bivektorius yra proporcingas magnetinei indukci-jai, Ω = q
mB, galim rašyti
Ωv⊥ = Ω ∧ v = v ∧Ω = v⊥Ω , (5.63a)
Ωv‖ = Ω · v = −v · Ω = −v‖Ω . (5.63b)
Iš jų išplaukia komutaciniai sąryšiai
Rv0⊥ = e−Ωt/2v0⊥ = v0⊥e−Ωt/2 = v0⊥R , (5.64a)
Rv0‖ = e−Ωt/2v0‖ = v0‖eΩt/2 = v0‖R . (5.64b)
Pasinaudoję šiomis lygybėmis eksponentes (5.61) sprendinyje galime perkelti įvieną pusę:
v = v0‖R2 + v⊥ = v0‖e
Ωt + v⊥ . (5.65)
Taigi, magnetinės indukcijos plokštumai statmenas sandas v⊥ nesikeičia, o esan-tis bivektoriaus B plokštumoje sandas v‖ = v0‖e
Ωt sukasi ratu kampiniu dažniu|Ω|. Todėl pilnas dalelės greičio vektorius v = v‖ + v⊥ precesuoja aplink ašį,statmeną magnetinės indukcijos plokštumai, t.y. apie magnetinės indukcijos vek-torių B.
Žinodami greitį, dalelės trajektoriją surandame išsprendę lygtį x = v:
x(t)− x0 =
ˆ t
0vdt = v0‖Ω
−1(eΩt − 1) + v0⊥t . (5.66)
Jei pradiniu laiko momentu statmeno magnetinės indukcijos bivektoriui greičiosandas lygus nuliui, v⊥ = 0, tai dalelė juda apskritimu. Kuo stipresnis magneti-nis laukas, tuo šio apskritimo spindulysmažesnis. Bendru atveju bekoordinatiniupavidalu užrašyta (5.66) lygtis aprašo spiralės pavidalo trajektoriją. Norėdamituo įsitikinti, užrašykime ją konkrečioje koordinačių sistemoje. Sandą v0⊥ nu-kreipkime išilgai e3, o v0‖ — išilgai e2 vektoriaus. Tada bivektoriaus plokštumayra statmena e3 sandui B⊥e3 ir Ω = q
m |B|e21 = − qm |B|e12, t. y. bivektorius
guli e1–e2 plokštumoje. Atvirkštinis bivektorius yra Ω−1 = mq|B|e12. Kadangi
eΩt = cos |Ω|t+ Ω
|Ω| sin |Ω|t = cos |Ω|t− e12 sin |Ω|t, tai įstatę visus dydžius į

104 5 skyrius
trajektorijos formulę (5.66) galutinai gauname
x(t)− x0 = |v0‖|e2( m
q|B|)e12(cos |Ω|t− e12 sin |Ω|t) + |v0⊥|te3
= −|v0‖|mq|B|
Äe1 cos |Ω|t− e2 sin |Ω|t
ä+ |v0⊥|te3 .
(5.67)
Kitaip tariant, elektronas pastoviu greičiu lekia ašies e3 kryptimi ir tuo pat metusukasie1–e2 plokštumojepagal laikrodžio rodyklę, t. y. jo trajektorijayra spiralė.
Diferencialinė lygtis (5.55) vadinama rotoriaus judėjimo lygtimi. Žinant ro-toriaus evoliuciją nesunku apskaičiuoti visus kitus dydžius, pavyzdžiui, greičiovektoriaus (5.61) dinamiką. Matysime, kad sprendžiant uždavinius geometrinėsalgebros metodais sudėtingas diferencialines lygtis fizikiniams dydžiams dažnaipavyksta pakeisti daug paprastesnėmis lygtimis jų rotoriams, panašiomis į (5.55).
Tiek koordinatės x(t), tiek ir greičio v(t) vektorių sukimąsi nusako ta pati(5.61) lygtis
x(t) = e−Ωt/2x0eΩt/2 . (5.68)
Išdiferencijavę abi jos puses pagal laiką, gauname
d
dtx(t) = −Ω
2e−Ωt/2x0e
Ωt/2 + e−Ωt/2x0eΩt/2Ω
2
= −Ω
2x(t) + x(t)
Ω
2= x(t) · Ω .
(5.69)
Rezultatas rodo, kad greitis yra koordinatės (vektoriaus) ir kampinio greičio (bi-vektoriaus) vidinė sandauga
v(t) = x(t) · Ω . (5.70)
Atidžiai pažvelgę į (5.69) formulę joje lengvai pastebėsite koordinatės x(t) irkampinio greičio Ω komutatoriaus išraišką. Bivektoriaus kvadratas Cl3,0 algeb-roje duoda neigiamą skaičių, todėl eksperimentiškai matuojamas yra fizikinis dy-dis ω:
ω =√−Ω2 . (5.71)
Angliškai skaliaras ω vadinamas angular speed, o bivektorius Ω — angular ve-
locity. Lietuviškai abu šiuos dydžius vadinsime tuo pačiu terminu — kampinisgreitis.
Kadangi sprendinyje (5.61) bivektoriusΩ yra konstanta, išdiferencijavę (5.70)lygtį dar kartą gauname
a(t) =dv(t)
dt= −Ω
2v(t) + v(t)
Ω
2= v(t) · Ω . (5.72)

Klasikinė mechanika. Trajektorijos ir sukimai 105
Norėdami sužinoti darbą arba energiją, kurią dalelė paima ar atiduoda mag-netiniam laukui, turime apskaičiuoti dalelės kinetinės energijos
Ek =m
2v(t)2 (5.73)
pokytį per laiko vienetą:
d
dtEk = m(vv + vv)/2 = mv · v = mv · a . (5.74)
Į šią formulę įstatę pagreičio išraišką (5.72) ir viską, kaip (5.52) formulėje, per-rašę geometrinėmis sandaugomis, randame, kad magnetinio lauko atliktas darbaslygus nuliui,
mv · a = 0 . (5.75)
Taigi, (5.72) pavidalo jėga F = ma neatlieka jokio darbo. Tokios jėgos vadina-mos konservatyviomis.
5.6. Dvimatis osciliatorius. Elipsinės trajektorijos
Panagrinėkime dvimatį osciliatorių, kurį aprašo tiesinė diferencialinė lygtis
mr(t) + kr(t) = 0 . (5.76)
Čia r(t) yra nuo laiko priklausantis spindulys-vektorius. Dalelės, kurios judė-jimą nusako (5.76) lygtis, trajektorija yra elipsė. Tuo nesunku įsitikinti užrašiusspindulį-vektorių ortogonalioje bazėje r(t) = x(t)e1 + y(t)e2 ir suskaidžiusosciliatoriaus lygtį (5.76) į atskirus sandus:Ä
mx(t) + kx(t)äe1 +
Ämy(t) + ky(t)
äe2 = 0 . (5.77)
Prilyginę skaliarines išraiškas prie bazinių vektorių nuliui, gauname dvi nepri-klausomas vienmačių osciliatorių lygtis. Svyravimų dviem statmenomis krypti-mis su skirtingomis amplitudėmis suma ir duoda eliptinę trajektoriją. Sprendi-niuose parinkdami laisvų koeficientų (dviejų amplitudžių ir dviejųpradinių fazių)vertes, elipsę galime pasukti, paversti ją apskritimu ar įvairiais kampais orientuo-tų tiesių atkarpomis. Pademonstruosime, kaip (5.76) lygtį išspręsti geometrinėsalgebros metodais.
Kaip bandomąjį sprendinį paimkime vektorių, kurio ilgis osciliuoja dėsniu
r(t) = aeΛt . (5.78)
Čia Λ yra kol kas nežinomas multivektorius. Įstatę šį sprendinį į (5.76) gaunamealgebrinę lygtį
Λ2 +k
m= 0 . (5.79)
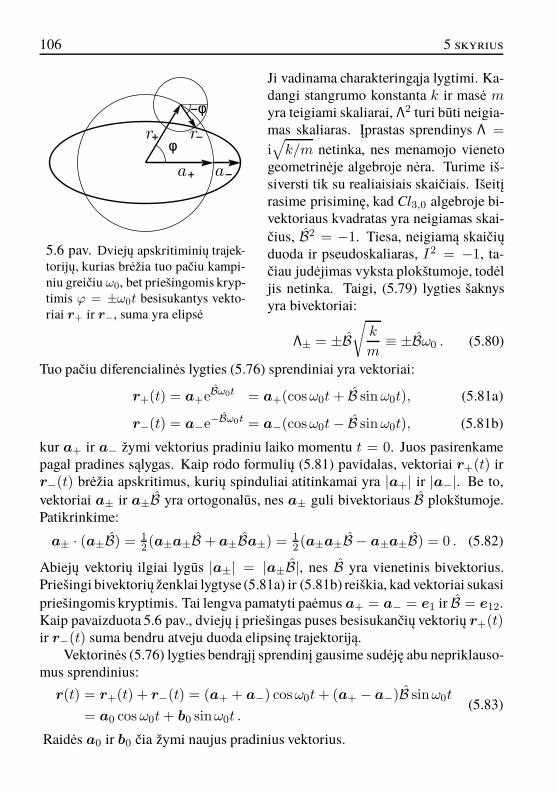
106 5 skyrius
5.6 pav. Dviejų apskritiminių trajek-torijų, kurias brėžia tuo pačiu kampi-niu greičiu ω0, bet priešingomis kryp-timis ϕ = ±ω0t besisukantys vekto-riai r+ ir r−, suma yra elipsė
Ji vadinama charakteringąja lygtimi. Ka-dangi stangrumo konstanta k ir masė myra teigiami skaliarai, Λ2 turi būti neigia-mas skaliaras. Įprastas sprendinys Λ =
i»k/m netinka, nes menamojo vieneto
geometrinėje algebroje nėra. Turime iš-siversti tik su realiaisiais skaičiais. Išeitįrasime prisiminę, kad Cl3,0 algebroje bi-vektoriaus kvadratas yra neigiamas skai-čius, B2 = −1. Tiesa, neigiamą skaičiųduoda ir pseudoskaliaras, I2 = −1, ta-čiau judėjimas vyksta plokštumoje, todėljis netinka. Taigi, (5.79) lygties šaknysyra bivektoriai:
Λ± = ±Bk
m≡ ±Bω0 . (5.80)
Tuo pačiu diferencialinės lygties (5.76) sprendiniai yra vektoriai:
r+(t) = a+eBω0t = a+(cosω0t+ B sinω0t), (5.81a)
r−(t) = a−e−Bω0t = a−(cosω0t− B sinω0t), (5.81b)
kur a+ ir a− žymi vektorius pradiniu laiko momentu t = 0. Juos pasirenkamepagal pradines sąlygas. Kaip rodo formulių (5.81) pavidalas, vektoriai r+(t) irr−(t) brėžia apskritimus, kurių spinduliai atitinkamai yra |a+| ir |a−|. Be to,vektoriai a± ir a±B yra ortogonalūs, nes a± guli bivektoriaus B plokštumoje.Patikrinkime:
a± · (a±B) = 12 (a±a±B + a±Ba±) =
12 (a±a±B − a±a±B) = 0 . (5.82)
Abiejų vektorių ilgiai lygūs |a±| = |a±B|, nes B yra vienetinis bivektorius.Priešingi bivektorių ženklai lygtyse (5.81a) ir (5.81b) reiškia, kad vektoriai sukasipriešingomis kryptimis. Tai lengva pamatyti paėmus a+ = a− = e1 ir B = e12.Kaip pavaizduota 5.6 pav., dviejų į priešingas puses besisukančių vektorių r+(t)ir r−(t) suma bendru atveju duoda elipsinę trajektoriją.
Vektorinės (5.76) lygties bendrąjį sprendinį gausime sudėję abu nepriklauso-mus sprendinius:
r(t) = r+(t) + r−(t) = (a+ + a−) cosω0t+ (a+ − a−)B sinω0t
= a0 cosω0t+ b0 sinω0t .(5.83)
Raidės a0 ir b0 čia žymi naujus pradinius vektorius.

Klasikinė mechanika. Trajektorijos ir sukimai 107
5.7. Centrinės jėgos. Keplerio uždavinys
5.7 pav. Judesio kie-kio momentas. TaškoO atžvilgiu punktyri-ne trajektorija judantidalelė per laiko viene-tą užgriebia plotą, pro-porcingą L = r ∧ p
Kaip rodo (5.72) formulė, jėga F ∼ v ·Ω = 12 (vΩ−
Ωv), kur v žymi dalelės greitį, o Ω kampinio greičio bi-vektorių, yra konservatyvi, nes tokiai jėgai veikiant da-lelės energija bėgant laikui nesikeičia. Laike nekintantisfizikinis dydis yra vadinamas judėjimo integralu. Paro-dysime, kad centrinių jėgų lauke, be energijos integralo,dalelė turi dar vieną judėjimo integralą, kuris vadinamasjudesio kiekio momentu.
Jėga f vadinama centrine, jei jos kryptis kiekvienulaiko momentu nukreipta išilgai spindulio vektoriausr = x− x′, jungiančio taške x esančią tiriamąją dalelęsu fiksuotu tašku x′, vadinamu jėgos lauko centru.Pavyzdžiui, Žemę veikianti Saulės gravitacijos jėga yracentrinė jėga. Geometrinė algebra idealiai tinka dalelėsjudėjimui tokiame lauke tirti. Matematiškai centrinę jėgą apibrėžia sąlyga
r(t) ∧ f = 0 , (5.84)
kuri ir užtikrina, kad jėga, kurią pažymėjome vektoriumi f , visada yra nukreiptaišilgai spindulio-vektoriaus r(t). Dalelės, kurios masė m, judesio kiekio mo-mentas yra bivektorius
L = mr ∧ r = mr ∧ v = r ∧ p , (5.85)
kur p = mv pažymėjome dalelės judesio kiekį, žr. 5.7 paveikslą. Vadovėliuosejis apibrėžiamas kaip aksialinis vektorius Lv
Lv = mr × v , (5.86)
dualus mūsų įvestam bivektoriui L,
Lv =⋆L = LI−1 = −IL . (5.87)
Į centrinės jėgos apibrėžimą (5.84) įstatę jėgos išraišką iš Newtono judėjimolygties ir pridėję nulinį narį r ∧ r = 0 gauname
0 = r ∧ f = r ∧ (mr) = m(r ∧ r + r ∧ r) = md
dt(r ∧ r) =
d
dtL . (5.88)
Taigi, jei dalelė juda centriniame lauke, judesio kiekio momentas L = mr ∧ r
yra jos judėjimo integralas, t. y. L = const.Geometrinė algebra judesio kiekio momentui L suteikia aiškią interpreteciją.
Būtent dydisLmdt = r ∧ (vdt) = r ∧ dr (5.89)

108 5 skyrius
yra dvigubas (orientuotas) plotas, kurį užgriebia spindulio-vektoriaus brėžiamaslankas. Čia dr žymi lanko elementą, statmeną spinduliui r. Per baigtinį laikointervalą [0, t] judančios dalelės apibrėžiamas plotas tada yra integralas
A(t) =1
2
ˆ
r(t)
r(0)r ∧ dr =
1
2
ˆ t
0r ∧ r dt . (5.90)
Todėl spindulio-vektoriaus r(t) užgriebiamo ploto kitimą laikui bėgant aprašodiferencialinė lygtis
A =1
2r ∧ r =
L2m
. (5.91)
Centrinės jėgos atveju L nuo laiko nepriklauso, todėl užgriebiamas plotas yratiesiog proporcingas laikui
A(t) =L2m
t . (5.92)
Ši formulė yra yra ne kas kita, kaip antrasis Keplerio dėsnis. Jis teigia, kad cent-rinės jėgos lauke judančios dalelės spindulio užgriebiamas plotas yra tiesiogiaiproporcingas laikui (žr. 5.7 paveikslą). Jei orbitos yra apskritimai, tada per vie-nerius metus T planetos spindulys apibėga pilną apskritimą, t. y. apimtas plo-tas sutampa su viso skritulio plotu πR2 ir iš (5.92) formulės išplaukia lygybėπR2 = L
2mT . Žinodami, pavyzdžiui, kad Marsas skrieja maždaug 1,4 karto to-liau nuo Saulės negu Žemė, galime teigti, kad Marso metai yra apytiksliai dukartus ilgesni už Žemės metus.
Keplerio uždavinys aprašo dalelės judėjimą centriniame lauke, kurio stipru-mas yra atvirkščiai proporcingas dalelės atstumo nuo lauko centro kvadratui. To-kiame lauke juda apie Saulę planetos, o taip pat elektronas apie teigiamai įkrautąbranduolį, kur elektroną prie branduolio traukianti jėga yra elektrinės prigimties.Per paskutiniuosius šimtmečius Keplerio ir į jį panašūs uždaviniai buvo išnagri-nėti iki smulkmenų. Kosmoso užkariavimo eroje jie turėjo didelę praktinę reikš-mę. Prie Keplerio uždavinio sprendimo yra prisilietę visi žymesni mokslininkai.Geometrinės algebros metodais jį pirmą kartą išsprendė D. Hestenes [12]. Pla-netos judėjimą nusako tokia netiesinė diferencialinė Newtono lygtis:
mr = −k r
|r|2 , (5.93)
kur traukos jėga dešinėje pusėje nukreipta išilgai spindulio r, jungiančio Saulęir planetą. Pastovioji k yra proporcinga planetos ir Saulės masių sandaugai k =GmM , kur raide G pažymėjome gravitacinę konstantą. Traukos jėga yra centri-nė, todėl, kaip matėme, ji turi judėjimo integralą bivektoriųL = mr∧v = const.

Klasikinė mechanika. Trajektorijos ir sukimai 109
Iš čia išplaukia, kad L ∧ r = L ∧ v = 0. Todėl galime rašyti
Lv = L · v, Lr = L · r. (5.94)
Pasinaudoję judėjimo integralo L apibrėžimu (5.85), judėjimo lygtimi (5.93) beispindulio-vektoriaus ir greičio ortogonalumu r · r = 0, apskaičiuokime dydįLv:
Lv =Ämr ∧ r
äÇ −krm|r|2
å= −k(r ∧ ˙r)r = −kr ˙rr = krr ˙r = k ˙r . (5.95)
Tai reiškia, kad radome dar vieną judėjimo integralą
d
dt(Lv − kr) = 0 . (5.96)
Jį suintegravę gauname nepriklausantį nuo laiko vektorių, kurį pažymėsime kaipsandaugą ke,
Lv − kr = ke . (5.97)
Vektorius e vadinamas ekscentricitetu. Tai bedimensinis dydis. Iš (5.97) lygtiesnesunku išspręsti greičio priklausomybę nuo spindulio vektoriaus krypties, jeiyra žinomi judėjimo integralai L ir e,
v = kL−1(r + e) . (5.98)
L−1 lengva apskaičiuoti iš formulės (4.57),L−1 = L/|L|2. Jei yra žinomi judėji-mo integralai, tada greitis (5.98) priklauso tik nuo spindulio-vektoriaus krypties.Norėdami surasti dalelės trajektoriją, abi (5.97) lygties puses padauginsim iš r irperrašysim pavidalu
Lvr = L(v · r + v ∧ r) = v · rL +1
mLL = k(|r|+ er) . (5.99)
Išprojektavę skaliarinę (5.99) dalį gauname skaliarinę lygtį
1
m|L|2 = k|r|(1 + e · r) . (5.100)
Ji nusako spindulio-vektoriaus ilgio priklausomybę nuo krypties
|r| = |L|2mk(1 + e · r) . (5.101)
Palyginę su (5.16) išraiška matome, kad tai kūginio pjūvio paviršiaus, kurio si-metrijos ašį trimatėje erdvėje užduoda ašis e, lygtis. Taigi, konkrečios trajek-torijos (ar dalelė judės apskritimu, elipse, parabole ar hiperbole) pobūdį lemiainvariantas e = ee, kur e pažymėjome vienetinį vektorių. Kadangi |r| = 1, tra-jektorijos forma priklauso nuo skaliaro e vertės, žr. 5.1 lentelę. Jei 0 < e < 1,

110 5 skyrius
turime elipsę. Jei e = 1, trajektorija bus parabolė. Jei e > 1, gauname hiperbo-lę. Jei e = 0, sukimosi trajektorija yra apskritimas. Apskritiminės trajektorijosatveju (5.98) lygtis supaprastėja:
v = kL−1r . (5.102)
Iš jos matome, kad greičio dydis dabar nuo laiko nepriklauso,o greičio kryptis yrastatmena r. Tai dera su tuo, kad multivektoriusLvr dabar virsta grynu skaliaru.Iš tiesų, Lvr = L(v · r + v ∧ r) = Lv ∧ r = −m(r ∧ v)2 yra skaliaras.Geometrinei algebrai skirtose knygose [12, 13] aprašyta, kaip dalelių judėjimuigravitaciniame lauke pritaikyti perturbacijų teoriją.
Judesio kiekio momentas L (bivektorius) ir ekscentricitetas e (vektorius) yradu Keplerio uždavinio invariantai. Trečiasis invariantas yra pilnoji energija, kuriyra kinetinės ir potencinės energijų suma. Energija yra skaliaras:
E =mv2
2− k
|r| . (5.103)
Apskaičiavę šios išraiškos išvestinę pagal laiką turime gauti nulį. Patikrinkime:
dE
dt=m
2(vv + vv) +
k
|r|2d|r|dt
. (5.104)
Pastebėję, kad vv + vv = (v · v + v ∧ v) + (v · v − v ∧ v) = 2v · v, irpasinaudoję judėjimo lygtimi (5.93), greičio išvestinę v ≡ r pakeiskime jėga.Tada kinetinis narys įgyja pavidalą m
2 2v · v = −kv · r/|r|2. Kadangi v =
dr/dt = d(|r|r)/dt = (d|r|/dt)r + |r| ˙r, energijos išvestinė virsta
dE
dt= −k
Çd|r|dt
r + |r| ˙rå·Ç
r
|r|2å+
k
|r|2d|r|dt
= 0 , (5.105)
nes r·r = 1 ir ˙r·r = 0. Taigi, suradome tris Keplerio uždavinio invariantus: ska-liarą — energiją E , vektorių —- ekscentricitetą e ir bivektorių — judesio kiekiomomentą L. Bivektorius apibrėžia plokštumą, kurioje guli trajektorija. Vekto-rius nusako trajektorijos židinių padėtį šioje plokštumoje ir trajektorijos pobūdį.Netrivialaus invarianto, kuris būtų trivektorius nėra, nes centrinės jėgos veikia-ma dalelė visada juda vienoje plokštumoje. Pabrėšime, kad Keplerio uždavinįsu Cl3,0 algebra išsprendėme bendriausiu trimačiu atveju, visai nesistengdami josuvesti į dvimatį pavidalą.
Dabar parodysim, kad trys mūsų surasti invariantai E , e ir L nėra visiškainepriklausomi vienas nuo kito. Tuo tikslu pasinaudoję pagrindine formule (5.97)ir savybėmis
r2 = 1, vL = −Lv, Lvr − rvL = 2Lv ∧ r, L2 = −|L|2 , (5.106)

Klasikinė mechanika. Trajektorijos ir sukimai 111
kurias nesunku patikrinti, apskaičiuokime dydį (ke)2:
(ke)2 = (ke)(ke) = (Lv − kr)(Lv − kr) = −(Lv − kr)(vL+ kr)
= −(LvvL− krvL+ kLvr − k2r2) = −L2v2 − 2kLv ∧ r + k2
= −L2v2 +2kL2
m|r| + k2 = −2L2
m
Çmv2
2− k
|r|
å+ k2
= −2L2
mE + k2 . (5.107)
Iš jo išplaukia toks ryšys tarp visų trijų invariantų:
e2 = 1 +2|L|2mk2
E . (5.108)
Klasika tapusioje Goldsteino knygoje „Klasikinė mechanika“ [14] ši formulė iš-vedama visai kitu būdu.
5.7.1. Rutherfordo sklaida. Išspręskime elektrono, iš begalybės lekiančio įteigiamai įkrautą branduolį, sklaidos uždavinį. Sklaidos kampą surasime iš eks-centriciteto (5.97) formulės. Toli nuo branduolio, kur branduolio įtaka yra begalo maža, elektrono greitis v ir jo spindulys-vektorius r yra beveik lygiagre-tūs. Pažymėję vienetinį bivektorių, sudarytą iš spindulio-vektoriaus r ir asimp-totinio greičio v, simboliu erv , judesio kiekio momento bivektoriaus išraiškojeL = mr ∧ v = m|r||v|erv sinα kampo sinuso funkciją galime pakeisti tiesiog|L| ≈ m|v||r|α, kur α žymi mažą kampą tarp v ir r. Kadangi judesio kiekiomomentas yra invariantas, tai elektronui esant be galo toli bivektoriaus L dydisturi tenkinti sąlygą
lim|r|→∞α→0
|L| = const , (5.109)
t. y. sandauga |r|α ≈ ∞ · 0 turi išlikti pastovi.Jei elektronas nepataiko tiesiai į branduolį, tada branduolys tik nukreipia
elektroną kita kryptimi ir dalelė pralekia pro branduolį hiperboline trajektorija.Toks procesas vadinamas Rutherfordo sklaida. Ją mes ir nagrinėsime. Sklaidoskampu vadinamas kampas ϑ = π−θ tarp elektrono krypties pradiniu t = −∞ irgaliniu t = ∞ laiko momentais. Šias asimptotines kryptis vaizduoja punktyrinės5.8 paveikslo tiesės. Kadangi trajektoriją nusako ekscentricitetas, tai per jį turiišsireikšti ir sklaidos kampas ϑ. Norėdami jį surasti padauginkime (5.97) lygtį išdešinės iš vienetinio spindulio-vektoriaus r:
Lvr = k(1 + er) . (5.110)

112 5 skyrius
5.8 pav. Rutherfordo sklaida.Ištisinė linija vaizduoja hiper-bolinę trajektoriją. Brūkšniuo-tos linijos yra asimptotės, e yraekscentriciteto vektorius,F žy-mi trajektorijos židinį
Skaliarinė šio reiškinio dalis yra
〈Lvr〉0 = k(1− e cosθ
2) , (5.111)
kur θ žymi kampą tarp dviejų asimptočių, kaipparodyta 5.8 paveiksle. Kita vertus,
Lvr = L|v|Äcosα + ˆerv sinα
ä. (5.112)
Kaip ir anksčiau, kampą tarp šių vektorių pa-žymėjome raide α. Skaliarinę (5.112) išraiš-kos dalį gausime tik sudauginę bivektorių Lsu bivektoriumi erv . Ši dalis lygi 〈Lvr〉0 =m(|v||r| sinα)2/|r|. Kadangi dydis skliaus-tuose yra judesio kiekio momento integralas(konstanta), tai asimptotikoje |r| → ∞ išraiš-kos 〈Lvr〉0 riba yra
lim|r|→∞
〈Lvr〉0 = lim|r|→∞
const|r| = 0 . (5.113)
Todėl (5.111) lygtis virsta k(1 − e cos θ2) = 0, iš kurios, pasinaudoję sąryšiuϑ = π − θ, surandame sklaidos kampo vertę
cosÄ12 (π − ϑ)
ä= e−1 . (5.114)
Gavome labai paprastą išraišką, kurioje Rutherfordo sklaidos asimptotinį kampąvisiškai nusako ekscentriciteto modulis e ≡ |e|. Kai sklaidos nėra, hiperbolėvirsta tiese ϑ = 0, ir ekscentricitetas, kaip ir turi būti, tampa begaliniu. Jei dalelėišsklaidoma dideliu kampu ϑ ≈ π, trajektorija ima panašėti į parabolę, e ≈ 1.
5.8. Ryšys su Eulerio kampais
Geometrinės algebros rotorių
R = eBϕ = cosϕ+ B sinϕ (5.115)
visada galima užrašyti naudojant tik vienetinį bivektorių B = a ∧ b, kuriam su-konstruoti užtenka bet kokių dviejų tiesiškai nepriklausomų vienetinių vektoriųa ir b. Rotoriaus išraišką (5.115) būtų galima pavadinti apibendrinta Eulerio for-mule eiϕ = cosϕ + i sinϕ. Skirtumas tik toks, kad bivektorius B turi aiškiągeometrinę prasmę, tuo tarpu menamasis vienetas i =
√−1 tokios geometrinės

Klasikinė mechanika. Trajektorijos ir sukimai 113
5.9 pav. Trimačių sukimų realiza-vimas Eulerio kampais α, β ir γ.Parodyti ir kiti galimi sukimų para-metrizavimai
interpretacijos neturi. Rotorių nekomu-tavimas trimatėje ir aukštesnių matavimųerdvėse atspindi geometrinį faktą, kad ke-leto sukimų rezultatas priklauso ne tiknuo sukimo plokštumų ir posūkių dydžio,bet ir nuo jų tvarkos (eiliškumo). Suki-mą į priešingą pusę gauname apgręžę ro-torių, t.y. pritaikę apgrąžos transforma-ciją (2.22), kuri pakeičia bivektoriaus Borientaciją, R = e−Bϕ = cosϕ− B sinϕ.Todėl posūkis ten ir atgal nieko nepakei-čia, t. y. RR = (cosϕ+ B sinϕ)(cosϕ−B sinϕ) = cos2 ϕ − B2 sin2 ϕ = 1, nesB2 = −1.
Sukimų daugiamatėse erdvėse realizavimas naudojant geometrinės algebrosrotorius daug pranašesnis už sukimų aprašymą Eulerio kampais. Tai nulemiakeletas dalykų. Pirma, sukimas geometrinės algebros rotoriumi visada viena-reikšmis, antra, sukimui realizuoti prireikia daug mažiau daugybos operacijų neidauginant sukimo matricas. Panagrinėkime, pavyzdžiui, gerai žinomus ir prak-tikoje nepaprastai svarbius trimačius sukimus. Tokie sukimai dažnai aprašomiEulerio kampais α, β ir γ . Naudojant juos koordinačių sistemą pirmiausia su-kame kampu 0 ≤ γ < 2π apie z ašį (sukimo plokštuma e12), po to kampu0 ≤ β ≤ π apie y ašį (plokštuma e13), ir pagaliau dar kartą apie z ašį kampu0 ≤ α < 2π, kaip pavaizduota 5.9 paveiksle. Atstojamasis rotorius, užrašytasper Eulerio kampus, tada lygus sandaugai
R(α, β, γ) = ee12α/2ee13β/2ee12γ/2 , (5.116)
kurioje bivektoriai e12 ir e13 atitinka koordinatines plokštumas x–y ir x–z. Šieksponenčių sandauga paprastai užrašoma kaip matricų sandauga [14], todėl vi-so kombinuoto sukimo matrica išeina pakankamai sudėtinga. Jei (5.116) for-mulėje paimtume β = 0 ir išskleistume eksponentes, gautume R(α, β, γ) =cos α+γ2 +e12 sin
α+γ2 . Kadangi atsakymas priklauso tik nuo kampų sumosα+γ ,
reiškia, vietoje dviejų laisvų parametrų α ir γ iš tiesų turime tik vieną α+γ . Ki-taip sakant, esant β = 0 kampo vertei sistema praranda vieną laisvės laipsnį irją sukti tegalime apie vieną ašį. Taigi, sistemai (pavyzdžiui, kosminio palydovogiroskopui) atsidūrus β = 0 taške jos tolesnė sukimosi kryptis jau nebus viena-reikšmiškai apibrėžta. Ir tikrai, β vertei tapus nenuline, sistemos laisvės laipsniųskaičius vėl turi išaugti nuo vieno iki įprastų dviejų. Kai θ = π, gauname dar vie-ną singuliarų tašką, tik jame sukimo matrica priklauso vien nuo kampų skirtumo

114 5 skyrius
α−γ . Aprašytas Eulerio kampų daugiareikšmiškumasyra labai nepageidautinasvaldant skraidymo aparatus ar robotus2. Taigi, aprašant sukimus trimis Euleriokampais neįmanoma išvengti dviejų ypatingų sferinės koordinačių sistemos taš-kų. Jų nebus, jei sukimus realizuosime bivektoriais arba kvaternionais, kurie yraCl3,0 algebros dalis. Tuo tikslu vektoriumi, dualiu bivektoriui B, užduodame su-kimo ašįOM , o su ω — pasukimo kampą, kaip pavaizduota 5.9 paveiksle. Tiekašies kryptis, tiek ir pasukimo kampas gali kisti laikui bėgant.
5.1 pavyzdys. Parodysime, kad pasukimas π/2 kampu plokštumoje e12, o po jo pa-sukimas π/2 kampu plokštumoje e23, yra ekvivalentus pasukimui kampu φ = 2π/3
plokštumoje B = 1√3(e12 + e23 + e31) . Tuo tikslu apskaičiuokime ir palyginkime abu
rotorius:
ee23π/4ee12π/4 =
√2
2(1 + e23)
√2
2(1 + e12) =
1
2(1 + e12 + e23 + e31) ,
eBπ/3 =1
2+ B
√3
2=
1
2(1 + e12 + e23 + e31) .
(5.117)
5.2 pavyzdys. Parodysime, kad rotorius eBφ/2, kur B yra paimtas iš ankstesnio pa-vyzdžio sąlygos, sukeičia ašis e1 → e3, e3 → e2 ir e2 → e1. Iš tiesų,
eBπ/3e1e−Bπ/3 =
1
2(1 + e12 + e23 + e31)e1
1
2(1− e12 − e23 − e31) = e3, ir pan.
(5.118)Trimatėje erdvėje plokštumą B = 1√
3(e12+e23+e31) lengviau įsivaizduosime, užrašę
ją per dualų vektorių ⋆B = −IB = 1√3(e1 + e2 + e3) .
5.9. Standžiojo kūno sukimasis ir jo rotorius
Sprendžiant kūnų sukimosi uždavinius dažnai naudinga žinoti kampinių irlinijinių dydžių atitikmenis. Ši analogija pateikiama 5.2 lentelėje. Atkreipsimedėmesį, kad kampas θ yra bivektorius, kaip parodyta 4.2 paveiksle. Todėl išves-tiniai dydžiai (kampinis greitis, pagreitis), o taip pat ir judesio kiekio momentasL taip pat yra bivektoriai. Masės vaidmenį kampiniams dydžiams vaidina kū-no inercijos momentas Im (skaliaras), kurį reikia skaičiuoti sukimosi centro at-žvilgiu. Tiesa, jei kūnas nėra sferiškai simetriškas, vietoje skaliarinio inercijosmomento Im tenka įvesti antros eilės inercijos tenzorių, atsižvelgiantį į kūno for-mos asimetriją. Tai gerokai komplikuoja uždavinį, nes Eulerio lygtyje atsirandapapildomų narių.
2Pavyzdžiui, 1969 m. gegužės18 d. šioje nevienareikšmėje padėtyje atsidūrė Apollo 10 misi-jos Mėnulio nusileidimo modulio giroskopas. Modulį pavyko išgelbėti tik astronautams pervedusjį į rankinio valdymo režimą.

Klasikinė mechanika. Trajektorijos ir sukimai 115
Linijiniai dydžiai Kampiniai dydžiaiPavadinimas r Simbolis Simbolis r PavadinimasKelias 1 x ≡ r Θ 2 KampasGreitis 1 v = x Ω = Θ 2 Kampinis greitis (dažnis)Pagreitis 1 a = x α = Θ 2 Kampinis pagreitisMasė 0 m Im = mr2 0 Inercijos momentas
Kinetinė energija 0 E = mv2
2 T = Im Ω∧Ω2 0 Kinetinė energija
Darbas 0 W = F · x W = 〈T ∧ Θ〉 0 DarbasGalia 0 P = F · v P = 〈T ∧ Ω〉 0 GaliaImpulsas 1 p = mv L = ImΩ 2 Judesio kiekio momentasJėga 1 F = dp/dt T = dL/dt 2 Jėgos momentas
Newtono lygtis 1 F = mv T = Im Ω 2 Eulerio lygtis
5.2 lentelė. Kampinių ir linijinių dydžių analogija. Nurodytas pavadinimas, ran-gas r ir fizikinį dydį apibrėžiantis matematinis sąryšis
Standžiuoju vadinamas kūnas, kuriame atstumas dij =»(ri(t)− rj(t))2
tarp bet kurių dviejų jo taškų ri ir rj nesikeičia kūnui judant, t. y. kūnui ėmusgreitėti ar pradėjus suktis jis nesideformuoja. Standžiojo kūno judėjimo uždavinįgalima išskaidyti į du: į masės centro judėjimo uždavinį ir kūno kaip visumossukimosi šio masės centro atžvilgiuuždavinį. Sukimąsi patogu aprašyti rotoriumiR(t). Jei ri(0) žymi taško padėtį laiko momentu t = 0, tada taško koordinatęmasės centro atžvilgiu vėlesniu laiko momentu nusako formulė
ri(t) = R(t)ri(0)R(t) . (5.119)
Taigi, standžiojo kūno sukimosi uždavinys suvedamas į rotoriaus R(t) apskai-čiavimą. Kaip rodo (4.107) formulė, rotorių nusako vienetinis bivektorius B,t. y. plokštuma, kurioje vyksta sukimasis ir pats posūkio kampo dydis |θ|. Pa-prasčiausiu atveju, kai kūnas sukasi vienoje plokštumoje pastoviu greičiu, turimeB = const ir |θ(t)| = ωt, kur ω yra kampinio greičio dydis. Priminsim, kad ro-toriaus eksponentėje stovi pusės kampo dydis |θ(t)|/2. Bendriausiu atveju tieksukimosi plokštuma, tiek ir kampinio greičio dydis gali būti laiko funkcijos. Kaipmatėme ankstesniame skyriuje, jei B priklauso nuo laiko, rotorių patogu aprašyti(5.119) pavidalo formule. Įvedę kampą-bivektorių Θ(t) = B(t)|θ(t)|, turime
R(t) = e−12Θ(t). (5.120)
Rotorių išdiferencijavę randame
R(t) = −1
2Θ(t)R(t), R(t)R(t) = −1
2Θ(t) ≡ −1
2Ω(t) , (5.121)

116 5 skyrius
kur Ω(t) = Θ(t) pažymėjome kampinį dažnį. Pasinaudoję (5.121) nesunkiaiapskaičiuojame koordinatės (5.119) išvestinę pagal laiką v = dr/dt:
v(t) =1
2
Är(t)Ω(t)− Ω(t)r(t)
ä= r(t) · Ω(t) . (5.122)
Taigi, greitis lygus vektoriaus r ir kampinio greičio bivektoriaus Ω vidinei san-daugai. Ši formulė pakeičia senojo vektorinio skaičiavimo formulę ω = r × v,kurioje ω laikomas aksialiniu vektoriumi.
Dabar apskaičiuokime vidinę greičio v(t) ir spindulio-vektoriaus r(t) san-daugą. Padauginę (5.122) išraišką iš r iš kairės ir prie jos pridėję tą pačią išraišką,padaugintą iš r iš dešinės, gauname v(t) · r(t) = 0. Vadinasi, šie dydžiai betkuriuo laiko momentu yra tarpusavyje statmeni v(t)⊥r(t). Jei kampo bivekto-rius Θ(t) yra tiesiog proporcingas laikui, t.y. Θ(t) = Ωt, kur Ω ciklinio dažniobivektorius, tada greičio priklausomybę nuo laiko lemia tik laikui bėgant kintan-tis spindulys-vektorius, v(t) = 1
2
Är(t)Ω − Ωr(t)
ä= r(t) · Ω. Bendru atveju
uždavus koordinačių sistemą, bivektorių galima išskaidyti į sandus
Ω(t) = Ω12(t) + Ω23(t) + Ω31(t)
= ω3(t)e12 + ω1(t)e23 + ω2(t)e31 .(5.123)
Formulė rodo, kad laikui bėgant keičiasi ne tik dažnio dydis, bet ir sukimosiplokštumos padėtis erdvėje. Todėl bivektorių Ω(t) patogu susieti su pradiniu bi-vektoriumiΩ0. Kadangi bivektoriai sukami lygiai taip pat, kaip ir vektoriai,Ω(t)galime visada „atsukti“ į pradinį Ω0 su tuo pačiu (kol kas nežinomu) rotoriumiR(t):
Ω(t) = R(t)Ω0R(t), Ω0 = R(t)Ω(t)R(t) . (5.124)
Tuo pasinaudoję diferencialinę lygtį (5.121) rotoriui galime užrašyti paprasčiau:
R(t) = −1
2Ω(t)R(t) = −1
2R(t)Ω0,
˙R(t) =
1
2Ω0R(t) . (5.125)
Tada iš vektoriaus sukimo formulės r(t) = R(t)r0R(t) išplaukia, kad linijinisgreitis (5.122) yra tik rotoriaus funkcija
v(t) = R(t)(r0 · Ω0)R(t) . (5.126)
Taigi, įvedę rotorių, fizikinio dydžiodinamikosuždavinį pakeitėme rotoriaus evo-liucijos uždaviniu. Kitaip tariant, žinodami fizikinio dydžio vertę pradiniu laikomomentu t = 0, tolesnes jo vertes nesunkiai apskaičiuosime, jei žinosime, kaiplaikui bėgant keičiasi rotorius. Atkreipsime dėmesį, kad pradiniu momentu sis-tema gali judėti su pagreičiu, todėl Ω0 = dΩ0/dt gali būti nelygus nuliui net irstacionariame uždavinyje. Toks metodas, kuriame sukimosi uždavinys suveda-

Klasikinė mechanika. Trajektorijos ir sukimai 117
mas į rotoriaus dinamikos uždavinį, labai būdingas geometrinei algebrai. Pavyz-džiui, taip skaičiuojama elektrono kvantinio sukinio dinamika [13, 15].
Toliau išreikštai išspręsime standžiojo kūno, kuriam būdinga ašinė simetrija,sukimosi uždavinį. Tai gali būti, pavyzdžiui, cilindras, žiedas, vamzdis, elipsoi-das, kūgis ar kuris nors kitas simetrijos ašį turintis kūnas. Laikysime, kad kūnasgali suktis apie bet kokią laisvai pasirinktą ašį. Kaip matyti iš Eulerio formulės(žr. 5.2 lentelę), standžiojo kūno judėjimo kiekio momento pokytis yra propor-cingas kūną veikiančiam jėgos momentui T ,
d
dtL(t) = T (t) . (5.127)
Kita vertus, judesio kiekio bivektoriaus kitimą laike nusako rotorius R(t),
L(t) = R(t)L0R(t) , (5.128)
kur L0 yra judesio kiekio vertė pradiniu momentu. Išdiferencijavę turime
L(t) = R(t)L0R(t) + R(t)L0R(t) + R(t)L0˙R(t) . (5.129)
Pasinaudoję (5.125) formule eliminuojame rotoriaus išvestines. Tada judesiokie-kio momento kitimą lemia tik fizikinių dydžių pradinės vertės ir paties rotoriausevoliucija:
L(t) = R(t)(L0 +
1
2L0Ω0 −
1
2Ω0L0
)R(t) . (5.130)
Iš 5.2 lentelės matome, kad taškinei masei judesio kiekio momentas yra iner-cijos momento skaliaro ir kampinio greičio bivektoriaus sandauga, L0 = ImΩ0.Tuo tarpu baigtinių matmenų kūnas su simetrijos ašimi jau charakterizuojamasdviem inercijos momentais. Vienas iš jų, Im‖, nusako inercijos momentą kūnuisukantis apie simetrijos ašį, o kitas, Im⊥, jam sukantis plokštumoje, kurioje gu-li ši ašis. Abu inercijos momentai yra 3 × 3 inercijos tenzoriaus diagonaliniaielementai Im⊥ = Im1 = Im2 ir Im‖ = Im3. Jie dar vadinami pagrindiniaiskūno inercijos momentais. Konkretiems standiesiems kūnams jų išraiškos pa-teiktos [12] knygoje. Jei ašį e3 nukreipsime išilgai kūno simetrijos ašies, tokiojekoordinačių sistemoje judesio kiekio momentas įgyja pavidalą
L0 = Im⊥ω1e23 + Im⊥ω2e31 + Im‖ω3e12
= (Im⊥ω1e23 + Im⊥ω2e31 + Im⊥ω3e12) + (Im‖ω3e12 − Im⊥ω3e12)
= Im‖Ω0 + (Im‖ − Im⊥)ω3e12 = Im‖Ω0 + (Im‖ − Im⊥)(Ω0 ∧ e3)e3 ,(5.131)
kur paskutiniame žingsnyje ω3e12 užrašėme kaip pradinio bivektoriaus Ω0 =ω1e23 + ω2e31 + ω3e12 projekciją į e12 plokštumą, ω3e12 = (Ω0 ∧ e3)e3, arba

118 5 skyrius
abi puses padauginus iš e3, ω3I = Ω0 ∧ e3. Iš (5.131) galime išreikšti Ω0:
Ω0 =L0
Im‖−Im‖ − Im⊥
Im‖ω3e12 . (5.132)
Toliaunagrinėsime tik atvejį, kai išorinio jėgos momento nėra, T (t) = 0. Ta-da pilnas judesiokiekiomomentas yra judėjimo integralas, L(t) = 0 irL = const.Pasinaudoję (5.132) lygtimi, kampinio greičio bivektorių galime užrašyti tokiupavidalu:
Ω(t) = R(t)Ω0R(t) =R(t)L0R(t)
Im‖−Im‖ − Im⊥
Im‖ω3R(t)e12R(t) . (5.133)
Dydis R(t)L0R(t) = L yra pilnas judesio kiekio momentas ir nuo laiko nepri-klauso. Pritaikius (5.125) formulę, rotoriaus judėjimo lygtis įgyja pavidalą
R(t) = −1
2Ω(t)R(t) = −1
2
LR(t)
Im‖−Im⊥ − Im‖
Im‖ω3R(t)e12 . (5.134)
Įvedę du kampinius greičius-bivektorius
Ωl =LIm‖
, Ωs =Im⊥ − Im‖
Im‖ω3e12 , (5.135)
ją galime užrašyti trumpiau
R(t) = −1
2ΩlR(t)−
1
2R(t)Ωr . (5.136)
Skirtingai negu pilnas kampinis greitis Ω, kampiniai greičiai Ωl ir Ωs nuo laikonepriklauso. Tai matyti iš jų apibrėžimų (5.135), nes kūnas sukasi pastoviu grei-čiu ω3 fiksuotoje sukimosi plokštumojee12, o inercijos momentus lemia tik kūnoforma, kuri nekinta. Kadangi sprendėme stacionarų uždavinį, atsirado galimybėpradines sąlygas L0 pakeisti judėjimo integralu L. Taip pat atkreipkite dėmesį,kad ieškomasis rotorius R viename naryje stovi bivektoriui iš dešinės, o kitame— iš kairės. Vadinasi, lygties (5.136) sprendinys yra eksponenčių sandauga
R(t) = e−Ωlt/2R0e−Ωst/2 . (5.137)
Integravimo konstantą galime imti R0 = 1. Įstatę (5.137) į (5.119) lygtį gausimetaško, priklausančio kūnui, trajektoriją. Taigi, ašinės simetrijos kūno sukimąsi,kaip rodo (5.137) formulė, galima išskaidyti į du kampinius greičius. Jei L gulibivektoriaus e12 plokštumoje, L = Im‖ω3e12, tada (5.137) formulė duoda tikvieną kampinį greitį. Jei sukimosi ašis yra L plokštumoje, tada ω3 yra lygusnuliui. Tai reiškia, kad antrasis rotorius virsta vienetu, ir vėl turime tik vienąkampinį sukimosi greitį. Abu daliniai atvejai atitinka tikrines sukimosi modas.

6. Laukai: kaip juos diferencijuoti bei integruoti
Vienareikšmę išvestinę kompleksinei funkcijai galima apibrėžti tik tada, kaiji tenkina Cauchy-Riemanno sąlygą. Ši sąlyga taip susaisto kompleksinės funkci-jos f(z) realiąją ir menamąją dalis, kad išvestinės df(z)/dz vertė taške ima ne-priklausyti nuo to, kuria kryptimi (pagal realią ar menamą ašį, ar bet kuria tarpi-ne) kompleksinėje plokštumoje tą išvestinę skaičiuojame. Daugiamatėse erdvėsefunkcijos, kurių išvestinė(s) nepriklauso nuo krypties, vadinamos holomorfinė-mis funkcijomis (graikiškai oλoς = visas, bet kuris ir µoρϕη = pavidalas). Fizi-kams terminas „holomorfinis“ asocijuojasi su žodžiu „holograma“. Panašumasnėra atsitiktinis. Kompleksinių funkcijų teorijoje Cauchy teorema tvirtina, kadžinant analizinės, t. y. be galo daug kartų diferencijuojamos, funkcijos vertes antpaviršiaus galima sužinoti jas ir visame tūryje, kurį tas paviršius gaubia. Holo-grama iš esmės daro tą patį. Iš šviesos intensyvumo ir fazės, įrašytų dvimačiamepaviršiuje, ji leidžia susidaryti tūrinį objekto vaizdą. Fizikams holomorfiškumosavybė yra nepaprastai svarbi dar ir todėl, kad dažniausiai nenorime, jog fizikinioobjekto savybė duotame taške priklausytų nuo to, iš kurios pusės prie to taško ar-tėjame. Kadangi skaičiavimai daugiamatėse erdvėse apibendrina kompleksinesfunkcijas, holomorfinės funkcijos dar vadinamos hiperkompleksinėmis.
Skyriuje susipažinsime su diferencijavimu daugiamatėse erdvėse, o jo pa-baigoje suformuluosime ir paaiškinsime fundamentaliąją geometrinės algebrosteoremą, kuri yra ne kas kita, kaip svarbiausio kompleksinio kintamojo teori-jos rezultato — integralinės Cauchy teoremos — apibendrinimas. Platesnį įvadąapie diferencialinį ir integralinį skaičiavimą daugiamatėse erdvėse skaitytojas raspuikiose knygose [16] ir [17].
6.1. Laukai — skaliariniai, vektoriniai, bivektoriniai ir kitokie
Paimkime multivektoriųM(x), apibrėžtą kiekviename vektorinės erdvės taš-ke, kurį nusakysime spinduliu-vektoriumi x. Kadangi x žymi tam tikrą erdvėstašką, sakoma, kad M yra taško padėties funkcija. Jos išraiška gali būti gana su-dėtinga, nes bendru atveju multivektorių sudaro skirtingo rango elementai, kiek-
119

120 6 skyrius
a) b)
6.1 pav. a) Įelektrintas laidas aplink save sukuria elektrinį vektorinį lau-ką E(x), kurio kryptį ir dydį rodo rodyklės. b) Laidu tekanti srovė sukuriaorientuotais stačiakampiais pavaizduotą magnetinį bivektorinį lauką B(x)
vieną iš kurių nusako jo dydis, padėtis erdvėje ir vidinė orientacija. Kadangi skir-tingo rango multivektoriai „nesimaišo“ (skirtingų rango menčių suma iš esmėsyra tik žymėjimo susitarimas), todėl galime atskirai nagrinėti skaliarus, vekto-rius, bivektorius ir pan. Pavyzdžiui, pasirinkę koordinačių sistemą ir užrašę jojeelektrinį lauką sandais, turime E = Exe1 + Eye2 + Eze3, kur Ex, Ey ir Ezyra erdvės taško funkcijos. Elektrinis laukas yra fizikinis, apčiuopiamas objek-tas, nes pasinaudoję labai mažu bandomuoju krūviu galime išmatuoti jo dydį irkryptį, t. y. sandų Ex, Ey ir Ez vertes. Magnetinį lauką irgi galima užrašytisandais, B = Bxe23 + Bye31 + Bze12, kur Bx, By ir Bz priklauso nuo erdvėstaško. Tai bivektorius, kuris yra toks pats realus, kaip ir elektrinio lauko vekto-rius. Jo veikiamos smulkios geležies drožlės išsirikuoja lygiagrečiai magnetiniolauko vektoriui B = ⋆B = BI−1, kuris, kaip žinome, yra statmenas magnetiniolauko bivektoriaus B plokštumai. Panašiai elektrinis krūvis, kurio tankį nusakoskaliaras ρ, užrašomas kaip trivektorius ρe123, nes tūris yra trivektorius. Taigi,laukams galime priskirti rangą ir skirstyti juos į skaliarinius, vektorinius, bivekto-rinius, trivektorinius ir t. t. laukus. Fizikoje šie laukai kartais slepiasi po kitokiaispavadinimais. Pavyzdžiui, paprasčiausiu atveju spinorinis laukas yra ne kas kita,kaip skaliarinis+bivektorinis laukas, nes šis laukas nusako, kaip elektrono suki-nys priklauso nuo erdvės koordinatės. Šiluminis laukas yra tas pats skaliarinislaukas, nes temperatūra yra skaliaras. Įtempimų ir deformacijų lauką kietamekūne nusako bivektorius.
6.1 paveiksle pavaizduoti du laukai, elektrinis ir magnetinis, taip kaip juosįsivaizduojame geometrinėje algebroje. Pirmasis paveikslas vaizduoja tolygiaielektriniu krūviu įkrauto begalinio laido elektrinį lauką. Matome, kad vekto-rinis elektrinis laukas yra statmenas laidui ir silpnėja (rodyklių ilgis trumpėja)tolstant nuo laido. Tuo tarpu antrasis paveikslas vaizduoja magnetinį lauką, kurįsukuria tuo pačiu laidu tekanti pastovi elektros srovė. Kadangi magnetinis laukasyra bivektorius, jį pavaizdavome orientuotomis plokštumomis, kurių orientaciją

Laukai: kaip juos diferencijuoti bei integruoti 121
rodo skirtingo pilkumo abiejų pusių atspalviai ir krašto rodyklės. Pakeitus sro-vės kryptį spalvas tektų sukeisti vietomis. Kadangi lauko intensyvumas mažėjatolstant nuo laido, bivektorių plotas, kaip matome iš piešinio, taip pat mažėja.Vadovėliuose, kur naudojamas vektorinis skaičiavimas, toks magnetinis laukasvaizduojamas koncentriniais apskritimais.
Sename vektoriniame skaičiavime laukams charakterizuoti buvo įvestos gra-diento, divergencijos bei rotoriaus sąvokos. Pavyzdžiui, skaliarinio lauko T (x)gradientas ∇
ÄT (x)
änusako kryptį, kuria einant laukas keičiasi staigiausiai, o
taip pat šio pokyčio dydį. Jei vektorinio lauko E(x) divergencija nelygi nuliui,reiškia, kad x taške patalpintas tam tikros galios lauko šaltinis. Tuo tarpu apskai-čiavę vektorinio lauko rotorių galime pasakyti, ar yra lauke sūkurys ir kokio jisstiprumo. Panašios sąvokos egzistuoja ir geometrinėje algebroje, kurias netrukusir apibrėšime. Tačiau geometrinėje algebroje atsiranda ir kitokio rango laukai,kuriuos sudaro bivektoriai ar trivektoriai, o apibendrintosedaugiamatėse erdvėseir aukštesnio rango multivektoriniai laukai. Mūsų tikslas — išmokti apskaičiuo-ti šių įvairių laukų erdvines išvestines. Svarbiausias naujos vektorinės analizėspranašumas yra tai, kad ji tinka bet kokios dimensijos ir metrikos erdvėms, be to,visada turi atvirkštinį operatorių ∇−1. Todėl išmokę skaičiuoti trimatėje Eukli-do erdvėje, nesunkiai viską galėsime pakartoti keturmatėje Minkowskio erdvėje,kurios ne tik matavimų skaičius, bet ir metrika iš esmės skiriasi.
6.2. Diferencijavimas ir nabla operatorius
5 skyriuje apibrėžėme multivektoriaus išvestinę pagal parametrą, kuriuo ne-reliatyvistinėje fizikoje dažniausiai būna laikas. Kaip matyti iš (5.28) formulės,diferencijavimas komutatyvinėje ir nekomutatyvinėje algebrose skiriasi tik tuo,kad pastarojoje svarbu nesuardyti diferencijuojamų narių tvarkos. Tačiau, be lai-ko, fizikoje ne mažiau svarbus ir diferencijavimas pagal koordinates x, y, z.Dažnai sutinkamo diferencialinio operatoriaus pavyzdys yra operatorius ∇, va-dinamas nabla:
∇ = i∂
∂x+ j
∂
∂y+ k
∂
∂z, TRADICINIS NABLA (6.1)
kur i, j ir k žymi ortonormuotos Dekarto koordinačių sistemos ortus, pavaiz-duotus 1.5 paveiksle. Su nabla labai patogu užrašyti skaliarinio f(x, y, z) laukogradientą ar vektorinio lauko f(x, y, z) divergenciją ir rotorių:
gradÄf(x, y, z)
ä= ∇
Äf(x, y, z)
ä,
divÄf(x, y, z)
ä= ∇ ·
Äf(x, y, z)
ä,
rotÄf(x, y, z)
ä= ∇×
Äf(x, y, z)
ä.
(6.2)

122 6 skyrius
Panašus diferencialinis operatorius įvedamas geometrinėje algebroje, tik čia vie-toje komutuojančių ortų i, j ir k apibrėžime pasirodo tarpusavyje nekomutuo-jantys baziniai vektoriai e1, e2, e3,
∇ = e1∂
∂x1+ e2
∂
∂x2+ e3
∂
∂x3, Cl3,0 ALGEBROS NABLA (6.3)
kur x1, x2 ir x3 žymi vektoriaus x = x1e1 + x2e2 + x3e3 erdvines koordi-nates. Tiksliai šnekant, pats ∇ operatorius nėra vektorius. Tačiau jei išvesti-nes ∂/∂xi laikysime skaliariniais koeficientais, geometrinės algebros požiūriujis elgsis kaip tikras trimatis vektorius, todėl (6.3) formulėje jį užrašėme pajuo-dintai. Operatorius (6.3) plačiai naudojamas klasikinėje mechanikoje, hidrodina-mikoje, elektrodinamikoje, nagrinėjant nereliatyvistinius kvantinės mechanikosreiškinius, pavyzdžiui, sprendžiant Schrödingerio-Paulio lygtį. Tačiau jis nėrapats bendriausias vektorinis diferencijavimo operatorius, nes netinka nei krei-voms, nei neeuklidinėms erdvėms, o taip pat ir neortonormuotoms bazėms. Vė-liau (6.3) operatorių apibendrinsime, o dabar susipažinkime su svarbiausiomis josavybėmis.
6.2.1. Skaliarinio lauko išvestinė. Ji skaičiuojama taip pat, kaip ir papras-tas gradientas. Jei f(x) yra skaliarinis laukas, priklausantis nuo erdvės taškox, kurį galime įsivaizduoti ir kaip spindulį-vektorių, tai apskaičiavę jo išvestinępagal koordinatę gauname vektorinį lauką
∇
Äf(x)
ä=
3∑
k=1
ek∂f(x)
∂xk≡
3∑
k=1
ek∂kf(x), (6.4)
kur įvedėm santrumpą ∂/∂xk = ∂k. Kadangi operatorius tiesinis, tai diferenci-juojant laukų sumą operatorius ∇ veikia į kiekvieną sumos narį atskirai:
∇(f + g) = ∇f +∇g . (6.5)
6.1 pavyzdys. Paprasčiausią skaliarinį lauką sukonstruosime pastovų vektoriųa vidi-ne sandauga padauginę iš x spindulio-vektoriaus,a · x. Kadangi a = aiei ir x = xiei,kur pagal pasikartojantį indeksą reikia sumuoti nuo 1 iki 3, jo gradientas bus
∇(a · x) =∇((aiei) · (xkek)
)= ∇(a1x1 + a2x2 + a3x3)
=a1e1 + a2e2 + a3e3 = aiei = a,(6.6)
t. y. gradientas yra nukreiptas vektoriaus a kryptimi. Primename, kad skaičiuojameEuklido erdvėje, todėl visada e2i = 1. Kaip rodo gauta formulė ∇(a ·x) = a, rezultatas(vektorius)nepriklausonuo apskaičiavimams naudotos konkrečios koordinačių sistemos.Padauginę (6.6) lygties abi puses vidine sandauga iš vienetinio vektoriaus n gauname
n ·(∇(a · x)
)= n · a , (6.7)

Laukai: kaip juos diferencijuoti bei integruoti 123
kur n·a yra vektoriausa projekcijos į n dydis. Jis tampa didžiausias tada, kai n pasuka-me lygiagrečiai vektoriuia. Taigi, skaliarinio lauko gradientas ∇(a ·x) yra didžiausiasa kryptimi. Tokia pati savybė būdinga ir įprastam gradientui (6.2).
Pažymėkime simboliu kokią nors multivektorių daugybos operaciją. Taigali būti vidinė, išorinė ar geometrinė sandauga. Kadangi geometrinė algebranekomutatyvi, diferencijuojant laukus narių sukeisti vietomis negalime. Todėlsandaugos gradientas yra
∇(f g) = ek(∂kf) g + ekf (∂kg) . (6.8)
Kaip matome, tai ta pati gerai žinoma funkcijų sandaugos diferencijavimo taisyk-lė, tik ją taikant draudžiama keisti bazinių vektorių eiliškumą. Tai reiškia, kadgeometrinėje algebroje, skirtingai negu tradicinėje vektorinėje analizėje,
∇(f g) 6= (∇f) g + f (∇g) . (6.9)
Ją turime pakeisti taisykle, kurioje, išlaikant tą patį narių eiliškumą, būtų aiškiainurodyta, kuris iš argumentų yra diferencijuojamas. Todėl funkcijų sandaugostaisyklę (6.9) keisime į
∇(f g) = ∇f g + ∇f g , (6.10)
kur taškas virš diferencijavimo operatoriaus reiškia, kad jis veikia tik į kitu tašku1
pažymėtą simbolį, ir interpretuojamas taip:
1. Jei skliaustelių nėra, pavyzdžiui, ∇f g, nabla veikia tik į artimiausiąnarį dešinėje, ∇f g ≡ ∇f g.
2. Jei už ∇ yra sklausteliai, pavyzdžiui,∇(f g), tada operatorius veikiaį visus juose esančius narius, kaip (6.10) formulėje.
3. Jei ∇ veikia į toliau esantį narį, pavyzdžiui, ∇f g, tada operatorių irdiferencijuojamą narį, kaip parodyta, pažymim tašku.
4. Kai diferencijavimas veikia į multivektorių, esantį kitoje operatoriauspusėje, pavyzdžiui, g∇, tokį veikimą taip pat žymime tašku virš vei-kiamo nario.
Taigi, visi užrašai g∇ ir ∇(f g) ≡ ∇f g ir f∇g ar f g∇ geometrinėjealgebroje turi prasmę. Pateiksime keletą operatoriaus ∇ veikimo į sandaugą pa-vyzdžių.
1Tikimės, kad skaitytojas šio taško, kuris visada turi savo partnerį (ar net kelis), nesupainiossu išvestine pagal parametrą, žymimą „vienišu“ tašku.

124 6 skyrius
6.2 pavyzdys. Išskleidę vektorius ortonormuotoje bazėje apskaičiuokime vektoriauskvadrato x2 ir vektoriaus modulio |x| =
√x2 gradientus:
∇x2 = ∇(x21 + x22 + x23) = 2e1x1 + 2e2x2 + 2e3x3 = 2x,
∇|x| = ∇
»x21 + x22 + x23 =
2e1x1 + 2e2x2 + 2e3x3
2√x21 + x22 + x23
=x
|x| = x . (6.11)
Jei skaičiuojame dviejų skaliarinių funkcijų f ir g sandaugos gradientą, for-mulę (6.10) galime perrašyti įprastu pavidalu:
∇(fg) = (∇f)g+ f(∇g) = ∇fg + f∇g, (6.12)
nes skaliaras komutuoja su visais elementais.
6.3 pavyzdys. Apskaičiuosime ∇x2 bekoordinatiniu būdu naudodami (6.12) formu-lę:
∇x2 = ∇(|x||x|) = ∇|x||x|+ |x|∇|x| = x|x|+ |x|x = 2x. (6.13)
6.4 pavyzdys. Parodysime, kad ∇xx = −x.
∇xx =(e1∂x1+ e2∂x2
+ e3∂x3)xx = e1x∂x1
x+ e2x∂x2x+ e3x∂x3
x
=e1xe1 + e2xe2 + e3xe3 = (x1e1 − x2e2 − x3e3)
+ (−x1e1 + x2e2 − x3e3) + (−x1e1 − x2e2 + x3e3)
= − x1e1 − x2e2 − x3e3 = −x.
(6.14)
Iš čia išplaukia, kad ∇x2 galima apskaičiuoti bekoordinatiniu būdu ir nepanaudojantnormos išraiškos: ∇x2 = ∇(xx) = ∇xx+ ∇xx = 3x− x = 2x, nes, kaip pamaty-sime kitame pavyzdyje, ∇x = 3.
6.2.2. Vektorinio lauko išvestinė. Tegu a = a(x) žymi vektorinį laukątrimatėje Euklido erdvėje, kurio sandai yra
a = a1(x, y, z)e1 + a2(x, y, z)e2 + a3(x, y, z)e3 . (6.15)
Paveikime operatoriumi ∇ į a. Reikia įsidėmėti, kad geometrinės algebros po-žiūriu operatoriaus veikimas suprantamas kaip geometrinė∇ ir a sandauga. At-sižvelgę į tai, kad daugikliai nekomutuoja, randame
∇a =∂a1∂x
e1e1 +∂a1∂y
e2e1 +∂a1∂z
e3e1
+∂a2∂x
e1e2 +∂a2∂y
e2e2 +∂a2∂z
e3e2
+∂a3∂x
e1e3 +∂a3∂y
e2e3 +∂a3∂z
e3e3 .
(6.16)

Laukai: kaip juos diferencijuoti bei integruoti 125
Prisiminę, kad bazinių vektorių norma yra e1e1 = e2e2 = e3e3 = 1, matome,jog (6.16) formulės diagonalėje stovintys nariai sudaro vidinę ∇ ir a sandaugą,kaip (4.8a) formulėje:
∇ · a =∂a1∂x
+∂a2∂y
+∂a3∂z
. (6.17)
Likę šeši nariai susigrupuoja į išorinę sandaugą, kaip (4.8b) formulėje:
∇ ∧ a =(∂a3∂y
− ∂a2∂z
)e23 +
(∂a1∂z
− ∂a3∂x
)e31 +
(∂a2∂x
− ∂a1∂y
)e12. (6.18)
Taigi, (6.16) geometrinę sandaugą kaip ir paprastiems vektoriams (4.7) galimeperrašyti pavidalu
∇a = ∇ · a+∇ ∧ a . (6.19)
Pirmasis narys suprantamas kaip vektorinio lauko divergencija (skaliaras), o ant-rasis yra tradiciniam rotoriui dualus (žr. (4.12) sąryšį) bivektorius
∇ · a = diva, −I∇ ∧ a = rota . (6.20)
Taigi, nabla operatoriumi veikdami į vektorinį lauką gauname skaliarinio ∇ · air bivektorinio ∇ ∧ a laukų sumą.
6.5 pavyzdys. Paveikime ∇ operatoriumi vektorinį lauką, kurį nusako spindulys-vektorius x = xe1 + ye2 + ze3. Atlikę apskaičiavimus matome, kad atsakymas yraerdvės dimensija, o nelygus nuliui yra tik skaliarinis laukas,
∇x = ∇ · x+∇ ∧ x = 3 + 0 = 3 . (6.21)
Bivektorinė dalis nepasirodo, nes skaičiuojant pagal (6.18) formulę visos išvestinės yranuliai. Taigi, nesūkurinio lauko rotorius lygus nuliui.
6.6 pavyzdys. Išdiferencijuosime vektorinį lauką x3. Pasinaudosime tuo, kad x2 yraskaliaras.
∇x3 = ∇(x2x) = ∇x2x+∇x2x = 2xx+x2∇x = 2x2+3x2 = 5x2. (6.22)
6.2.3. Bivektorinio lauko išvestinė. Operatoriumi ∇ paveikę bivektorinįlauką B = B12e12 + B23e23 + B31e31 panašiai kaip ir vektoriams randame
∇B = ∇ · B +∇ ∧ B . (6.23)
Čia
∇ ·B =(∂B31
∂z+∂B21
∂y
)e1+
(∂B12
∂x+∂B32
∂z
)e2+
(∂B23
∂y+∂B13
∂x
)e3 (6.24)
yra vektorinis laukas, o
∇ ∧ B =(∂B12
∂z+∂B23
∂x+∂B31
∂y
)e123 (6.25)

126 6 skyrius
trivektorinis laukas. Pasinaudoję (4.26b) tapatybe trivektorinį lauką galime užra-šyti ir kaip bivektoriui dualaus vektoriaus divergenciją−I∇∧B = ∇ ·(−IB) =∇ ·B = divB.
6.7 pavyzdys. Jei a yra pastovus vektorius, tada bivektorinio lauko a ∧ x išvestinėstrivektorinė dalis visada lygi nuliui. Lieka tik vektorinė dalis, todėl
∇(a ∧ x) = ∇ · (a ∧ x) +∇ ∧ (a ∧ x) = −2a + 0 = −2a . (6.26)
6.2.4. Pseudoskaliarinio lauko išvestinė. Paveikę trimatės erdvės ∇ ope-ratoriumi trivektorinį lauką T = t(x, y, z)I , kur t yra skaliaras, gauname bivek-torinį lauką:
∇T = ∇ · T =∂t(x, y, z)
∂xe23 +
∂t(x, y, z)
∂ye31 +
∂t(x, y, z)
∂ze12 . (6.27)
To ir reikėjo tikėtis, nes vektoriaus ir trivektoriaus sandauga trimatėje erdvėje yra3−1 = 2 rango multivektorius, t. y. bivektorius. Pasinaudoję (4.26b) tapatybe iriškėlę pseudoskaliarą iš vidinės sandaugos, ją galime užrašyti ir kaip skaliariniolauko t ≡ t(x, y, z) išvestinę
∇ · T = ∇ · (It) = I(∇ ∧ t) = I∇t(x, y, z) . (6.28)
Paskutinę lygybę užrašėme prisiminę, kad vektoriaus ir skaliaro vidinė sandaugalygi nuliui, ∇ · t(x, y, z) = 0. Todėl algebriškai su operatoriumi ∇ galimeelgtis kaip su bet kokiu kitu vektoriumi, kuriam taikytini visi vidinių ir išoriniųsandaugų veiksmai.
Užrašytos formulės paaiškina ir tai, kodėl fizikai ilgą laiką išsivertė be vi-dinių ir išorinių išvestinių. Jie tiesiog trivektorinius ir bivektorinius laukus pa-keisdavo pseudoskaliariniais ir pseudovektoriniais (aksialinių vektorių) laukais.Tačiau geometrinė algebra teigia, kad ∇ operatorius gali veikti į bet kokio rangomultivektorių X,
∇X = ∇ · X+∇ ∧ X . (6.29)
Vidinės sandaugos išvestinė∇·X sumažina, o išorinė∇∧X padidinamultivekto-riaus rangą, todėl diferencijavimo operatorių galima apibendrinti daugiamatėmserdvėms, kur jį žymėsim nepajuodintu šriftu ∇.
6.2.5. Laplace’o operatorius. Daugelį fizikinių sistemų aprašo antros eilėsdiferencialinės lygtys. Jas išvedant tenka veikti ∇ operatoriumi bent du kartus,t. y. ∇ operatorių kelti kvadratu. Kadangi vektoriaus kvadratas yra skaliaras, taiir diferencijavimo operatoriaus kvadratas yra skaliarinis operatorius. Jis vadina-mas Laplace’o operatoriumi ir žymimas simboliu ∆:
∆ = ∇2 = ∇∇ = ∇ ·∇ =
∂2
∂x2+
∂2
∂y2+
∂2
∂z2. (6.30)

Laukai: kaip juos diferencijuoti bei integruoti 127
Būdamas skaliarinės prigimties Laplace’o operatorius negali pakeisti multi-vektoriaus, į kurį jis veikia, rango. Kita vertus, kadangi∆ = ∇
2, tai formaliai∇operatorių galime laikyti∆ operatoriaus kvadratine šaknimi. Ši savybė neturi tie-sioginio analogo tradiciniame vektoriniame skaičiavime, nebent, išskyrus, atvejį,kai nagrinėjame tik skaliarinius laukus. Iš tiesų, kaip rodo bendra (6.29) formulėar jos daliniai atvejai (6.19) ir (6.23), kvadratinę šaknį iš ∆ operatoriaus galimaištraukti tik įvedus geometrinę sandaugą. Atskirai paėmus, nei divergencija (vi-dinė sandauga), nei rotorius (išorinė sandauga), kaip tai aptarėme dar 1 skyriuje,neturi atvirkštinių operacijų. Kvadratinę šaknį (ženklo tikslumu) galima ištrauktitik iš geometrinės sandaugos ∇ =
√∆ =
√∇2 . Taigi, jei diferencialinę lyg-
tį pavyktų užrašyti taikant vien geometrines sandaugas, būtų galima viltis, kadjos sprendimas gerokai palengvės, nes sprendžiant bus galima taikyti atvirkštinęoperaciją.
Tolesniuose skyriuose mums prireiks dar vieno diferencialinio Cliffordo al-gebros operatoriaus, kuriame, be ∇ vektorinės išvestinės, diferencijuojama irpagal laiką (skaliarą):
D = ∇+1
v
∂
∂t. (6.31)
Šis operatorius vadinamas d’Alamberto operatoriumi. Siekdami suderinti dimen-sijas, išvestinę pagal laiką mes padauginome iš greičio dimensiją turinčios teigia-mos pastoviosios v. Jei Diraco operatorių padaugintume iš jam sujungtinio ope-ratoriaus, t. y. tokio, kuriame ženklas prie išvestinės pagal skaliarą yra priešingas,gautume kitą skaliarinį operatorių, kuris žymimas kvadratuku ,
=
Å∇+
1
v
∂
∂t
ãÅ∇− 1
v
∂
∂t
ã= ∆− 1
v2∂2
∂t2. (6.32)
Fizikams tai gerai žinomas d’Alambert’o operatorius. Jis aprašo bangos sklidimą.
∇ atsiradimo istorija
Apie simbolio ∇ atsiradimą pasakojama tokia istorija. Pirmasis jį įvedėW. R. Hamiltonas XIX a. tirdamas kvaternionus. „Nabla“ jis rašė kaip graikiš-ką didžiąją delta raidę, tik pasuktą 90 laipsnių kampu, . Todėl J. Maxwellassimbolį pasiūlė skaityti raides tariant atvirkščia tvarka, t. y. vadinti „atled“.Bet taip sutapo, kad tuo metu Britų muziejų pasiekė pirmosios didelį susidomė-jimą sukėlusios iškasenos iš Mesopotamijos, ir simbolis pasirodė labai panašusį vieną asiriečių styginį instrumentą. Todėl anglų matematikai jį perkrikštijoį „nabla“, nes graikų kalba šis žodis ir reiškia „styginis instrumentas“. Tiesa,su tuo sutiko ne visi. Dar ir dabar daug anglakalbių mokslininkų šį operatoriųsutrumpintai (nuo delta) vadina del.

128 6 skyrius
6.2.6. Kryptinė išvestinė. Kompleksinės funkcijos f(z), panašiai kaip irrealiosios, išvestinė nuo kompleksinio kintamojo z apibrėžiama kaip riba
f ′(z) = limz→0
f(z +z)− f(z)
z , (6.33)
kuri iš viso funkcijos pokyčio išskiria tiesiškai proporcingą kompleksinio argu-mento pokyčiui z dalį. Deja, šio bekoordinatinio apibrėžimo beveik neįmano-ma apibendrinti aukštesnių dimensijų vektorinėms erdvėms. Pavyzdžiui, pana-šų į (6.33) apibrėžimą pritaikius kvaternionams paaiškėjo, kad diferencijuojamųkvaternioninių funkcijų klasė išeina labai jau siaura. Ją sudaro tik tiesinės ir,padarius tam tikras išlygas, tiesinės-trupmeninės funkcijos. Todėl multivektori-nio lauko išvestinei apibrėžti bendru atveju naudojama ne įprasta (6.33) riba, opagrindinė integralinė analizės teorema, su kuria susipažinsime 12 skyriuje.
Taigi, kol kas bendrą apibrėžimą atidėkime ir panagrinėkime multivektoriniolauko išvestines, kai užduota ortonormuota geometrinės algebros bazė. Tada iš-vestinę galima apibrėžti uždavus dalines išvestines. Pavyzdžiui, dalinė spindulio-vektoriaus r = xe1 + ye2 + ze3 išvestinė išilgai bazinio vektoriaus e1 yra∂xr ≡ ∂r/∂x = e1 ir rodo, kad spindulio-vektoriaus pokytis išilgai e1 yrapastovaus dydžio.
Bendresniu atveju, naudojant dalines išvestines, lengva nusakyti funkcijoskitimą erdvėje bet kuria kita kryptimia. Tereikia susumuoti dalines išvestines suvektoriuje a nurodytais koeficientais. Todėl funkcijos f(x) išvestinė a kryptimiapibrėžiama kaip riba
∂af(x) = limτ→0
f(x+ τa)− f(x)
τ, (6.34)
kur τ yra skaliaras. ∂a vadinama kryptine išvestine kryptimi a. Kaip minėjo-me, apibrėžimas (6.34) tiesiog apibendrina tradicinę dalinę išvestinę. Jis išliekagalioti ir vektorinę funkciją pakeitus mente ar net bet kokiu multivektoriumi.
6.8 pavyzdys. Paimkime spindulį-vektorių f (x) = r ir raskime jo išvestinę h kryp-timi
∂hr = limτ→0
(r + τh)− r
τ= lim
τ→0
τh
τ= h. (6.35)
Taigi, spindulys-vektorius visomis kryptimis keičiasi vienodai.
6.9 pavyzdys. Paimkime f (x) = x21e1+(x1 +x2)e2 ≡ (x21, x1+x2) ir apskaičiuo-kime išvestinę kryptimih = e1+2e2. Pirmiausiax+τh = (x1+τ )e1+(x2+2τ )e2,todėl
∂e1+2e2f (x) = lim
τ→0
((x1 + τ )2e1 + (x1 + τ + x2 + 2τ )e2
)−(x21e1 + (x1 + x2)e2
)
τ
≈ limτ→0
2x1τe1 + (τ + 2τ )e2τ
= 2x1e1 + 3e2. (6.36)

Laukai: kaip juos diferencijuoti bei integruoti 129
Rezultatą patikriname naudodami tradicines dalines išvestines 1∂x1(x21, x1 + x2) +
2∂x2(x21, x1 + x2) = (2x1, 1) + 2(0, 1) = (2x1, 3) ≡ 2x1e1 + 3e2.
Kaip matome iš paskutinio pavyzdžio, apskaičiavimams (6.34) formulė nėrapatogi, nes reikia išskirti pirmos eilės (didžiausius) narius pagal nykstamai mažąparametrą τ . Galima parodyti, kad tą patį atsakymą gausime, jei naudosime for-mulę, kuri kryptinę išvestinę pakeičia nabla operatoriaus ir krypties vektoriaus avidine sandauga [13, 16],
∂af(x) = (a ·∇)f(x) = a ·∇f(x). (6.37)
Nors pirminis apibėžimas (6.34) yra akivaizdesnis, tačiau būtent (6.37) formulėdažniausiai naudojama kryptinėms išvestinėms apibrėžti ir skaičiuoti. Uždavusbazinius vektorius (koordinačių sistemą), išvestinė išilgai vektoriaus ei, kaip iš-
plaukia iš (6.37), įgyja tradicinės dalinės išvestinės pavidalą: ei ·∇f(x) = ∂f(x)∂xi
.
6.10 pavyzdys. Pasinaudoję (6.37) formule dar kartą surasime paskutiniųdviejų funk-cijų kryptines išvestines (primename, kad pirmiausia apskaičiuojame (a ·∇) išraišką):
∂hx = h ·∇x = (h1∂x1+ h2∂x2
+ h3∂x3)x = h1e1 + h2e2 + h3e3 = h, (6.38)
ir∂e1+2e2
f (x) =(e1 + 2e2) ·∇
(x21e1 + (x1 + x2)e2
)
=(∂x1+ 2∂x2
)(x21e1 + (x1 + x2)e2
)
=2x1e1 + e2 + 2e2 = 2x1e1 + 3e2.
(6.39)
Kryptinės išvestinės pavidalas (6.37) geras tuo, kad jis bekoordinatinis. Kaipminėjome, vektorinę funkciją f(x) joje galima pakeisti multivektoriumi F,
∂aF(x) = (a ·∇)F(x) . (6.40)
Operatorius a · ∇ = a1∂∂x1
+ a2∂∂x2
+ a3∂∂x3
vadinamas skaliariniu nabla. Jisnekeičia multivektoriaus rango ir rodo jo pokytį duota kryptimi.
6.11 pavyzdys. Rasime multivektorinės funkcijos F = bx, kur b yra pastovus vekto-rius, kryptinę išvestinę. Išskaidome multivektorių į skaliarą ir bivektorių:
a ·∇(bx) = a ·∇(b · x) + a ·∇(b ∧ x). (6.41)
Kadangi
a ·∇(b · x) =∑
i,j
ai∂xibjxj =
∑
i,j
aibjδij =∑
i
aibi = a · b (6.42)
ir
a ·∇(b ∧ x) =∑
i,j,k
ai∂xi(bjxk − bkxj)ejk =
∑
i,j,k
(aibjδik − aibkδij)ejk
=∑
j,k
(akbj − ajbk)ejk = −a ∧ b = b ∧ a ,(6.43)

130 6 skyrius
tai viso apskaičiavimo rezultatas yra
a ·∇(bx) = a · b+ b ∧ a = ba. (6.44)
Matome, kad tiesinės multivektorinės funkcijos kryptinė išvestinė, kaip ir turi būti, ne-priklauso nuo kintamojo x.
6.3. Orientuotas integravimas išilgai kreivės
Integravimo geometrinėje algebroje ypatumus aptarsime juos lygindami sutradiciniu vektoriniu integraliniu skaičiavimu. Nagrinėsime fizikams labai svar-bius kreivinius (vienmačius) bei bendresniu atveju paviršinius integralus. Tradi-ciniame vektoriniame skaičiavime integralai skirstomi į dvi rūšis. Vieni, kuriųkreivės lanko elementas nelaikomas orientuotu dydžiu (neturi vidinės orientaci-jos), vadinami pirmosios rūšies kreiviniais integralais (angl. path integral). Kiti,kurių kreivės lanko elementui priskiriama apibrėžta orientacija, vadinami antro-sios rūšies kreiviniais integralais (angl. line integral). Tradiciniame vektorinia-me skaičiavime mokoma, kaip apskaičiuoti skaliarinės funkcijos integralą. Taipirmosios rūšies integralas, kurio rezultatas yra skaliaras. Geometriškai toks in-tegralas interpretuojamas kaip plotas, esantis po integruojama kreive. Fizikojejis gali reikšti ir kokį nors kitą skaliarinį dydį. Pavyzdžiui, jei f(x) laikome krei-vės linijiniu tankiu, tai integralą galime interpretuoti kaip tos kreivės lanko masę.Jei paimsime vienodo tankio uždarą kreivę, pavyzdžiui, į lanką sulenktą plonąvielą, integralas nebus lygus nuliui, nes kreivės lanko elementas, kaip minėjome,integrale nelaikomas orientuotu dydžiu. Todėl kiekvieno lanko gabaliuko įnašasvisada teigiamas ir nulio niekada negausime. Antrosios rūšies integralų elemen-tarusis integravimo elementas yra orientuotas, todėl šis integralas išilgai uždarosvienalytės kreivės visada lygus nuliui, nes kiekvienam vektoriui galima surastitokį patį, tik priešingos krypties vektorių.
Toliau domėsimės tik integralais, kurių integravimo elementas yra orientuo-tas. Paprasčiausias yra skaliarinės funkcijos f(x), arba kitais žodžiais — skalia-rinio lauko integralas išilgai kreivės C. Jis suprantamas kaip suma
ˆ
Cf(x)dx ≈
n∑
i=1
f(xi)∆xi =n∑
i=1
f(xi)(xi+1 − xi) , (6.45)
kur vektorių skirtumas (xi+1 − xi) yra artimas kreivės C orientuotai liestineitaške i. Akivaizdu, kad tokio integravimo rezultatas yra vektorius. Paėmę, pa-vyzdžiui, f(x) = 1, gauname
ˆ
Cdx = b− a, (6.46)

Laukai: kaip juos diferencijuoti bei integruoti 131
6.2 pav. Skaliarinio lauko f(x) inte-gralo išilgai kreivės C interpretacija
kur a ir b žymi atitinkamai galinio ir pra-dinio kreivės taško vektorius, kaip pavaiz-duota 6.2 paveiksle. Iš jo akivaizdu, kad jeiintegravimo kreivė (kontūras) C yra užda-ra (tai žymi ant integralo simbolio nupieš-tas apskritimas), toks integralas visada ly-gus nuliui, nes galinis ir pradinis vektoriaisutampa,
˛
dx = 0 . (6.47)
Kadangi vektoriaus daugyba iš skaliaro vienodai apibrėžta tiek tradicinėje vekto-rinėje, tiek ir geometrinėje algebrose, tai ir skaliarinės funkcijos integralai abiematvejais irgi suprantami vienodai. Norėdami pamatyti skirtumą, turime išilgaikreivės C integruoti ne skaliarinį, o bent jau vektorinį lauką f ≡ f(x). Tradici-nėje vektorinėje algebroje du vektorius galima sudauginti tik skaliarine arba vek-torine sandauga, todėl apibendrinant (6.45) dešinę pusę sandaugoje f(xi) ∆xiženklas gali reikšti tik vieną iš tų dviejų sandaugų. Tuo tarpu geometrinėje al-gebroje integralinę sumą (6.45) galime dar interpretuoti ir kaip geometrinę vek-torių sandaugą. Taigi, naujasis integralas ne tik sujungia ir apibendrina visustradicinius vektorinės algebros integralus, bet ir atveria naujas galimybes. Api-bendrinę (6.45) formulę vektoriniam laukui f matome, kad vektorinio lauko krei-vinio integralo rezultatas yra multivektorius
ˆ
C
fdx =
ˆ
C
f · dx+
ˆ
C
f ∧ dx , (6.48)
kurį sudaro skaliaras ir bivektorius.
6.12 pavyzdys. Manysime, kad dirbame Cl2,0 algebroje. Apskaičiuosim (6.48) inte-gralą vektoriniam laukui f (x) = f (xe1 + ye2) = 2xye1 + y2e2 . Integruosim tieseC , kurios pradinis taškas (x, y) = (0, 0), o galinis (1, 2). Pirmiausia tiesę reikia para-metrizuoti. Iš kraštinių sąlygų išplaukia, kad ją aprašo lygtis x(t) = x(t)e1 + y(t)e2 =(e1 + 2e2)t. Iš tiesų, kai parametras t kinta nuo 0 iki 1, judame tiese išilgai vektoriause1+2e2 nuo taško (0, 0) iki (1, 2). Todėl dx = (e1+2e2)dt. Įstatę šią parametrizacijąį f turimeˆ 1
0
(2(1t)(2t)e1 + (2t)2e2
)(e1 + 2e2)dt =
ˆ 1
0
(4t2 + 8t2 + 8t2e1e2 + 4t2e2e1
)dt
=
ˆ 1
0
(12t2 + 4t2e1e2
)dt =
12t3
3
∣∣∣1
0+
4t3
3
∣∣∣1
0e1e2 = 4 +
4
3e1e2 . (6.49)
Taigi, integralas yra skaliaro ir bivektoriaus suma.

132 6 skyrius
6.13 pavyzdys. Tegu integravimo kreivė C yra vienetinis apskritimas x(t) = xe1 +ye2 = cos(2πt)e1+sin(2πt)e2. Paimkime vektorinį lauką f (xe1+ye2) = −ye1+xe2ir apskaičiuokime jo integralą
¸
fdx šiuo apskritimu. Pirmiausia apskaičiuojame kreivėslanko elementą, dx(t) =
(−2π sin(2πt)e1 + 2π cos(2πt)e2
)dt. Įstatę jį į integralo
išraišką randameˆ 1
0
(− sin(2πt)e1 + cos(2πt)e2
)(−2π sin(2πt)e1 + 2π cos(2πt)e2
)dt
= 2π
ˆ 1
0
(sin2(2πt) + cos2(2πt)
)dt = 2π
ˆ 1
0
dt = 2π .
(6.50)
Šiuo atveju bivektorinė dalis lygi nuliui.
Kai kurių vektorinių laukų integralo vertę lemia tik pradinis ir galinis in-tegravimo taškas. Ji nepriklauso nuo to, kokia kreive nuo vieno iki kito taškointegruodami judame. Tokie vektoriniai laukai vadinami konservatyviaisiais. Jiesvarbūs fizikoje, nes yra glaudžiai susiję su lauko potencialo sąvoka. Yra žinoma,kad jei egzistuoja skaliarinis laukas f(x), kurio gradientas duoda vektorinį laukąg(x), t. y. ∇f(x) = g(x), tuomet laukas g(x) yra konservatyvus. Konservaty-vių laukų integralus dažnai pavyksta apskaičiuoti bekoordinatiniu būdu.
6.14 pavyzdys. Paėmę f (x) = x apskaičiuokime bekoordinatiniu būdu (6.48) integ-ralo skaliarinę dalį
´
Cf (x) · dx. Pirmiausia įveskime skaliarinį parametrą t ir vektorių
užrašykime parametriniu pavidalu x = x(t). Tada integruodami kreive C nuo taškox(t0) = a iki taško x(tend) = b gauname
ˆ
C
x · dx =
ˆ
t
x · dxdt
dt =1
2
ˆ
t
Åxdx
dt+
dx
dtx
ãdt =
1
2
ˆ
t
d(x2)
dtdt
=1
2
ˆ b
a
d(x2) =1
2
(b2 − a2
),
(6.51)
kur x(t0) = a ir x(tend) = b. Matome, kad integralo vertė nepriklauso nuo kontūro C ,nes į atsakymą įeina tik pradinio ir galinio taško spinduliai-vektoriai.
Pats svarbiausias konservatyvusis laukas trijų dimensijų Euklido erdvėje yraf(x) = − x
|x|3 . Jo kryptis priešinga x, o dydis atvirkščiai proporcingas atstumo
nuo lauko centro kvadratui, |f(x)| =∣∣∣− x
|x|3∣∣∣ = |x|
|x|3 = 1|x|2 . Tokiomis savy-
bėmis pasižymi Newtono gravitacijos bei Coulombo elektrostatinis laukai. Juosgauname skaičiuodami skaliarinio potencialo 1/|x| gradientą:
∇
Ä1/|x|
ä= −x/|x|3. (6.52)
Formulę (6.52) nesunkupatikrinti nablą užrašius kaip narių ei∂xi sumą ir sudėjusatskirai apskaičiuotas skaliarines išvestines.

Laukai: kaip juos diferencijuoti bei integruoti 133
6.15 pavyzdys. Apskaičiuosime konservatyviojo lauko −x/|x|3 integralą nuo taš-ko (1, 2, 2) iki (2, 3, 6). Tai padarysime dviem būdais: a) taikydami (6.52) formulę irb) skaičiuodami išreikštai.
a) Pagrindinė integralinio skaičiavimo formulė yra´ b
aF ′(x)dx = F (a) − F (b),
kur F vadinama antiišvestine arba neapibrėžtiniu integralu [16]. Formulė išlieka teisin-ga ir daugiamatėje erdvėje. Iš (6.52) matome, kad konservatyvaus lauko neapibrėžtinisskaliarinis integralas lygus
−ˆ
x · ds|x|3 =
ˆ (∇
( 1
|x|))
· ds =1
|x| , (6.53)
todėl´ (2,3,6)
(1,2,2) |x|−3(−x · ds) = 1/√22 + 32 + 62 − 1/
√12 + 22 + 22 = − 4
21 .
b) Kadangi laukas konservatyvusis, tai integruosime išilgai paprasčiausios kreivės— abu taškus jungiančios tiesės. Lengva patikrinti, kad tokią tiesę trimatėje erdvėjeparametrizuoja lygtis s = (1 + t)e1 + (2 + t)e2 + (2 + 4t)e3. Išties, paėmę t = 0gauname apatinį, o kai t = 1, — viršutinį tašką. Tada ds =
(e1 + e2 + 4e3
)dt. Taigi,
reikia apskaičiuoti integralą
−ˆ 1
0
((1 + t)e1 + (2 + t)e2 + (2 + 4t)e3
)·(e1 + e2 + 4e3
)dt
|(1 + t)e1 + (2 + t)e2 + (2 + 4t)e3|3
= −ˆ 1
0
11 + 18t(9 + 22t+ 18t2
)3/2dt = − 4
21.
(6.54)
Paskutinėje eilutėje gautą integralą paprasčiausia apskaičiuoti pasinaudojant žinynu arkokia nors kompiuterinės algebros programa, pavyzdžiui, Mathematica. Matome, kadžinant potencialo išraišką 1/|x| ir pagrindinę integravimo teoremą, gauti atsakymą ne-palyginamai lengviau.
Prieš aptariant daugiamačius kreivinius integralus dar išsiaiškinkime, kaipinterpretuoti bivektorinę (6.48) integralo dalį. Ką ji reiškia, bus lengviau įsi-vaizduoti paėmus konkretų vektorinį lauką, pavyzdžiui, f(x) = x, kuris pavaiz-
6.3 pav. Vektorinio lauko f (x) = x
bivektorinės dalies integralo išilgaikreivėsC interpretacija
duotas 6.3 paveiksle. Dėl išorinės sandau-gos, kuri „sunaikina“ lygiagrečius abie-jų dauginamų vektorių sandus, vektorinislaukas x bus statmenas kreivės liestinėsvektoriui dx. Todėl sandaugos xi ∧ ∆xiyra keturkampiai ploteliai. Jei kiekvienąiš šių plotelių padalinsime pusiau, gausimestačiųjų trikampių plotų sumą, kurių bend-ras plotas bus lygus 6.3 paveiksle pavaiz-duoto sektoriaus, kurį ribojaC kreivė, plo-tui. Todėl integralą 1
2
´
C x ∧ dx supranta-

134 6 skyrius
me kaip minėto sektoriaus orientuotą plotą:
1
2
ˆ
Cx ∧ dx ≈1
2
n∑
i=1
xi ∧∆xi =1
2
Äx1 ∧ (x1 − x0) + x2 ∧ (x2 − x1)
+ x3 ∧ (x3 − x2) + · · ·+ xn ∧ (xn − xn−1)ä
=1
2(x0 ∧ x1 + x1 ∧ x2 + · · ·+ xn−1 ∧ xn) . (6.55)
Analiziškai tokie bivektoriniai integralai skaičiuojami lygiai taip pat, kaip anks-čiau aptarti skaliariniai integralai, pavyzdžiui, 6.13. Tereikia vidines sandaugaspakeisti išorinėmis.
6.16 pavyzdys. Apskaičiuokime´
Cx∧dx integralą kontūruC , kurį nusako r spindu-
lio apskritimas x(t) = r(e1 cos(t/r) + e2 sin(t/r)
). Pastebėsime, kad šį kartą kampus
trigonometrinėse funkcijose užrašėme per lanko ilgį (parametrą t). Todėl kitaip negu6.13 pavyzdyje, dabar apibėgant pilną apskritimą parametras t kinta ne intervale [0, 1], onuo 0 iki 2πr, t. y. iki viso apskritimo ilgio. Pirmiausia randame dx =
(−e1 sin(t/r)+
e2 cos(t/r))dt. Tada apskaičiuojame x ∧ dx = r
(e12 cos
2(t/r) − e21 sin2(t/r)
)dt =
re12dt. Todėlˆ
C
x ∧ dx = e12r
ˆ 2πr
0
dt = 2πr2e12 . (6.56)
Taigi, gavome dvigubą orientuotą apskritimo plotą. Jei norime turėti viengubą plotą,reikia sumuoti be galo mažus orientuotus trikampius, o ne keturkampius, todėl kaip irformulėje (6.55) rezultatą reikia padalinti iš dviejų.
Iki šiol nagrinėtuose integraluose po integralo simbolio stovėjo funkcija, otik po to diferencialo simbolis. Kadangi funkcija ir orientuotas lanko elementasnekomutuoja, juos sukeitę vietomis gausime kitą integralą. Pats bendriausiaskreivinis integralas išilgai kreivės gali turėti multivektorius tiek kairėje, tiek irdešinėje diferencialo ženklo pusėje:
ˆ
CF(x)dxG(x) . (6.57)
Čia F(x) ir G(x) yra bet kokie multivektoriai. Jei G(x) nėra skaliaras, dife-rencialo dx, bendrai kalbant, negalime perkelti per G(x). Kadangi išraiškosF(x)dxG(x) ir F(x)G(x)dx skiriasi, tai jų kreiviniai integralai taip pat skirsis.
6.4. Dualioji bazė. Metrika⋆
Iki šiol vektoriųa =∑i aiei skleidėme tik ortonormuotoje plokščios erdvės
bazėje ei ir visus indeksus rašėme tik apačioje. Deja, toks žymėjimas ne visadapatogus. Visų pirma, atliekant tiesinę koordinačių sistemos transformaciją sandai

Laukai: kaip juos diferencijuoti bei integruoti 135
ai ir vektoriai ei transformuojasi pagal atvirkščius dėsnius. Tai lengva suprasti,jei vektorių įsivaizduosime kaip strėlytę. Strėlytės kryptis erdvėje yra fiksuota irnepriklauso nuo to, kaip sukame koordinačių tinklelį. Jei bazinius vektorius su-kame į vieną pusę, skleidinio koeficientai (strėlytės projekcijos į bazinius vekto-rius) kompensuoja šį pokytį, t. y. transformuojasi priešinga linkme. Pavyzdžiui,jei Tij yra sukimo transformacijos matrica, kuri vektoriausa projekcijas pakeičianaujomis a′i =
∑j Tijaj , tada nauji baziniai vektoriai yra e′i =
∑j T
−1ij ej , kur
T−1ij = Tji žymi atvirkštinės matricos elementus. Iš tikrųjų, pasinaudoję suki-
mo matricos ortogonalumo savybe∑i TijT
−1ik =
∑i TkiTij = δkj galime rašyti
a =∑i aiei =
∑ijk TijajT
−1ik ek =
∑jk δkja
′je
′k =
∑k a
′ke
′k = a. Taigi,
pasukus koordinačių sistemą, kaip ir turi būti, pats vektorius nepasikeičia. Deja,šiuo metu mūsų naudojamas bazės žymėjimas šios svarbios savybės neatsispindi.
Antra, bazė ei nėra patogi operatoriaus, diferencijuojančio išilgai kreivo pa-viršiaus, skleidiniui užrašyti. Todėl šiame, o kai reikės — ir kituose skyriuo-se naudosim patobulintus žymėjimus, būtent, naujuose žymėjimuose suteiksimprasmę indeksų padėčiai. Todėl anksčiau užrašytą skleidinį pakeisime informa-tyvesniu
a =n∑
i=1
aiei ≡ aiei, (6.58)
kur pamatę tą patį viršutinį ir apatinį indeksą, panašiai kaip ir tenzoriniame skai-čiavime, suprasime sumavimą pagal visus bazinius vektorius ei. Ypač norimeatkreipti dėmesį, kad baziniai vektoriai šiame skleidinyje ir vėliau poskyryje apieatvirkštinębazę gali ir nebūti ortogonalūs. Dėl šios priežasties jie nėra pajuodinti.Tai reiškia, kad naujuose žymėjimuose niekur negalėsim pasinaudoti įprastais or-togonalios bazės sąryšiais eiej = −ejei, nes neortogonalių ei bazinių vektoriųsukeisti vietomis nemokame, eiej 6= −ejei.
Dabar susipažinkime su dar viena, vadinama atvirkštine (angl. reciprocal,
biorthogonal) baze ei, kurioje taip pat galima išskleisti bet kokį vektorių:
a =n∑
i=1
aiei ≡ aie
i, (6.59)
ir kur vėlgi pagal pasikartojančius indeksus reikia sumuoti. Atvirkštiniame (6.59)ir tiesioginiame (6.58) skleidinyje skaliarinių koeficientų ai ir ai vertės, apskritaikalbant, skiriasi. Taigi, tą patį erdvės vektorių galime išskleisti dviejose, priešin-gai besitransformuojančiose bazėse: pirminėje (6.59) atvirkštinėje (6.58). Bazėsei ir ei vadinamos viena kitai dualiomis.
Atvirkštinė bazė bus patogi skaičiavimams, jei pareikalausime, kad vidinėneortonormuotų bazinių vektorių iš tiesioginės ir atvirkštinės erdvės sandauga

136 6 skyrius
tenkintų sąlygą
ei · ej = ei · ej = δji =
®1 kai i = j,0 kai i 6= j .
(6.60)
Simbolis δji vadinamas apibendrintu Kroneckerio simboliu. Pabrėšime, kad są-ryšis ei ·ei = +1 (sumos nėra) yra teisingas nepriklausomai nuo to, ar vektoriauskvadratas e2i = eiei = ei · ei = ±s yra teigiamas, ar neigiamas skaičius s.
Bendru atveju, kai bazė nėra ortonormuota, įprastus sąryšius e2i = ±1 irei · ej = 0, jei i 6= j, turim pakeisti matrica
ei · ej = gij, (6.61)
kur skaliarinių koeficientų gij visuma vadinama metriniu tenzoriumi. Tuometsąlyga (6.60) leidžia nustatyti sąryšį tarp apatinių ei ir viršutinių ei indeksųbazių,
ej = gjkek, ei = gilel. (6.62)
Įstatę šias išraiškas į (6.60) ir pasinaudoję vektorių vidinės sandaugos simetriš-kumu (6.61) galime rašyti
ei · ej = (gilel) · (gjkek) = gilg
jk(el · ek) = gikgjk. (6.63)
Iš (6.63) išplaukia metrikos elementų ryšys tiesioginėje ir atvirkštinėje bazėsegikg
jk = gikgkj = δji .
Norėdami išmokti skaičiuoti atvirkštinėje bazėje, suraskime kaip atrodo ne-ortogonalioje bazėje išskleista dviejų vektorių vidinė sandauga:
a · b = (aiei) · (bjej) = aibj(ei · ej) = aibjgij = aibi, (6.64)
kur ai = akgik pažymėjome atvirkštinės bazės sandus su apatiniu indeksu. Ma-tome, kad savo paprastumu išraiška (6.64) nė kiek nesudėtingesnė už skleidi-nį ortogonalioje bazėje. Iš tiesų, jei bazė ortonormuota, gij = ±δij , tuometai = ±ai, kur ženklą nusako e2i . Taigi, visur teigiamai (euklidinei), pavyzdžiui,Cl3,0 algebros metrikai turime ai = ai, o visur neigiamoje (antieuklidinėje), pa-vyzdžiui, Cl0,3 algebroje gauname ai = −ai.
Apibendrinkime. Jei dirbame ortonormuotoje bazėje, erdvės metriką užduo-da bazinių vektorių kvadratai: gij = e2i δij = ±δij . Priešingu atveju vektorinėjeerdvėje patogiau įvesti dvi viena kitai dualias bazes ei ir ei, kurias tarpusa-vyje sieja metrinis tenzorius gij.
Kaip geometriškai susiję tiesioginės ir atvirkštinės bazės vektoriai geomet-rinėje algebroje? Kad būtų paprasčiau juos įsivaizduoti, toliau šiame skyriujedomėsimės tik dvimate Cl2,0 arba trimate Cl3,0 algebromis, kuriose, kaip matytiiš (4.55) formulės, I−1 = I = −I . Pačią erdvę ir toliau kol kas laikysime plokš-

Laukai: kaip juos diferencijuoti bei integruoti 137
6.4 pav. Trys vektoriai e1,e2 ir e3 nusako neortogo-nalią trimatės erdvės ba-zę. Atvirkštinis vektoriuse3 yra statmenas plokštu-mai e1 ∧ e2, kurią sudaroe1 ir e2. Dualaus baziniovektoriaus e3 ilgis randa-mas iš sąlygos e3 · e3 = 1
čia. Tačiau jos bazė dabar jau nėra nei ortogonali,nei normuota, todėl pseudoskaliaras E šioje bazėjedydžiu yra ne lygus, o tik proporcingas ortonormuo-tos bazės pseudoskaliarui, t. y. E = e1 ∧ e2 ∧ e3 =(1/k)I . Norėdami užtikrinti lygybę I−1I = 1, tu-rime imti E−1 = −kI . Abi bazės pavaizduotos6.4 paveiksle, kuriame, kad būtų aiškiau, parodytastik vienas atvirkštinis vektorius e3. Kaip matome,šis vektorius yra statmenas tiesioginės erdvės bivek-toriui e1∧e2, o jo ilgis atvirkščiai proporcingas vek-toriaus e3 ilgiui. Taigi, tiesioginės ir atvirkštinėserdvės vektorius sieja mums jau gerai žinoma dualu-mo transformacija e3 = (e1∧e2)E−1 = ⋆(e1∧e2).Panašiai randami ir likusieji atvirkštiniai Cl3,0 al-gebros vektoriai e1 ir e2:
e1 =(e2 ∧ e3)E−1 = ⋆(e2 ∧ e3),e2 =(e3 ∧ e1)E−1 = ⋆(e3 ∧ e1),e3 =(e1 ∧ e2)E−1 = ⋆(e1 ∧ e2),
(6.65)
kur žvaigždutė prieš bivektorių žymi dualumo transformaciją, tik dabar jau pseu-doskaliaro E atžvilgiu.
Matome, kad Cl3,0 algebroje koordinatinės plokštumos yra dualios atitinka-miems vektoriams. Teisingas ir atvirkščias teiginys, t. y. ⋆ei = ej ∧ ek . Paste-bėsime, kad nors tiesioginės ir atvirkštinės bazės vektorius sieja dualumo trans-formacija, geometrinėje algebroje būtų netikslu kalbėti apie tiesioginę ir dualią(atvirkščią) erdves, kaip apie skirtingus objektus. Kaip matome iš (6.65) sąryšio,turime vieną erdvę, bet dvi patogias skaičiavimams bazes. Šia savybe geometri-nė algebra skiriasi nuo diferencialinių formų teorijos, kurioje tiesioginė ir dualierdvės iš tiesų yra visiškai skirtingos (atskiros) erdvės.
6.17 pavyzdys. Patikrinsime, kad formulės (6.65) atvirkštiniai baziniai vektoriai ten-kina sąlygą ei · ei = 1 (sumos nėra), kuri dažnai naudojama ir kaip dualios bazės apibrė-žimas. Tuo tikslu pakanka patikrinti vieną iš sandaugų, pavyzdžiui,
e3 · e3 1=((e1 ∧ e2)E−1
)· e3 2
=((e1 ∧ e2)(−kI)
)· e3
3= −kI
((e1 ∧ e2) ∧ e3
)= E−1E = 1,
(6.66)
kur 3 žingsnyje pritaikėm I iškėlimo iš vidinės sandaugos taisyklę (4.26b).

138 6 skyrius
Tiesioginiai ir atvirkštiniai algebros Cl3,0 baziniai vektoriai sutinkami kietojokūno fizikoje. Jei trivektorius e1 ∧ e2 ∧ e3 žymi elementariąją kristalo gardelę,tada e1 ∧ e2 ∧ e3 yra atvirkštinė gardelė. Žinoma, turima mintyje, kad kristalegardelė pasikartoja periodiškai. Trimatės Euklido erdvės formules (6.65) galimaapibendrinti bet kokioms Cliffordo algebroms, nepriklausomai nuo jų dimensijosir signatūros. Bendras apibrėžimas [13] yra toks:
ej = (−1)j−1e1 ∧ e2 ∧ · · · ∧ ej ∧ · · · ∧ enE−1n , (6.67)
kur ej žymi, kad sandaugoje šį daugiklį reikia praleisti, o En = e1 ∧ e2 ∧ · · · ∧en yra tos algebros pseudoskaliaras. Lengva matyti, kad trimatės erdvės atvejuformulė (6.67) virsta (6.65).
6.18 pavyzdys. Reliatyvistinės mechanikos signatūra yra +,−,−,−. Tai reiškia,kad Cl1,3 algebros baziniai vektoriai tenkina sąlygas e21 = 1 ir e2i = −1, kai i = 2, 3, 4.Rasime šiai ei bazei atvirkštinę ei bazę. Kadangi En = e1 ∧ e2 ∧ e3 ∧ e4 = I4, taiE−1
n = −En = −I4. Pasinaudoję (6.67) formule, randame
e1 = e2 ∧ e3 ∧ e4(−I4) = e1,
e2 = −e1 ∧ e3 ∧ e4(−I4) = −e2,e3 = e1 ∧ e2 ∧ e4(−I4) = −e3 ,e4 = −e1 ∧ e2 ∧ e3(−I4) = −e4.
(6.68)
Patikriname (6.60) sąlygą, e1 · e1 = e21 = 1 ir ei · ei = −e2i = 1, kai i = 2, 3, 4.
6.4.1. Dualiniai tk ir tk vektoriai 2D ir 3D erdvėje. Plokščiose euklidinė-se erdvėse pakanka vienos ortonormuotos bazės. Pavyzdžiui, 3D erdvėje, kuriąnusako Cl3,0 algebra, matome, kad e1 = (e2∧e3)I
−1 = (e2e3)(e3e2e1) = e1.Panašiai yra su likusiais baziniais vektoriais: e2 = e1 ir e3 = e3. Dualiniai vek-toriai tk ir tk bei atitinkamos bazės ei ir ei reikalingi tik tuo atveju, jei dir-bame neortonormuotoje bazėje. Bazę ortogonalizavus ir sunormavus dualumasnereikalingas. Tačiau dirbant kreivose (neplokščiose) erdvėse, kuriose globaliosortonormuotos koordinačių sistemos iš principo įvesti neįmanoma, arba jei erd-vės signatūra nėra vienodoženklo, dualios bazės įvedimas yra neišvengiamas. Jeikreivą erdvę pavyksta įdėti (angl. embed; embedding = įdėtis) į didesnės dimen-sijos plokščią erdvę, tada ją galima aprašyti paprasčiau, naudojant šios didesnėsplokščios erdvės sąvokas. Būtent taip elgiamasi standartiniuosegeometrinės ana-lizės vadovėliuose. Sąlygos, kada vieną erdvę galima įdėti į kitą ir kiek didesnė jiprivalo būti, iki šiol nėra tiksliai nustatytos. Į šį labai sudėtingą klausimą čia nesi-gilinsime. Apsiribosime paprastu atveju, kai kreiva dvimatė erdvė (2D paviršius)yra įdėtas į plokščią trimatę Euklido erdvę, kurią nusako Cl3,0 algebra.

Laukai: kaip juos diferencijuoti bei integruoti 139
6.5 pav. Liestiniai baziniai vektoriait1, t2, t3 (juodos strėlės) ir atvirkšti-nės bazės vektoriai t1, t2, t3 (punkty-rinės strėlės) bei vienas iš paviršių S,gautų užfiksavus koordinatę x3 = c3.Statmenas paviršiui vektorius t3 priklau-so atvirkštinei, o ne liestinei bazei
Paimkime vektorinę funkciją f nuovektorinio argumento, būtent, f(x) ≡f(x1, x2, x3) = f1(x1, x2, x3) e1 +f2(x1, x2, x3) e2 + f3(x1, x2, x3) e3,kuri, kaip matyti, užduota 3D erdvėsortonormuotoje ei bazėje. Jos ver-tes galime įsivaizduoti kaip 3D erd-vės taškus, kuriuos nusako spindulys-vektorius f . Skaliarai x1, x2, x3 vadi-nami kreivalinijinėmis koordinatėmis.Pavyzdys galėtų būti gerai žinomossferinės koordinatės r, θ, ϕ, kuriosespindulio-vektoriaus x padėtį nusakoatstumas nuo koordinačių pradžios r irazimutinis θ bei poliarinis ϕ kampai.Jei vieną iš xi užfiksuosime, tada keis-dami kitus du gausime paviršių, įdėtą įtrimatę erdvę. Paimkime tokią konkre-čią funkciją:
f(x)=Äx1+
1
2x2 + x3
äe1 +
√3
2x2e2
−Äx1 +
1
2x2ä2e3,
(6.69)kurioje, tikimės, skaitytojas atskirs viršutinius indeksus nuo laipsnio rodiklio.Nabla operatorių išskleisime atvirkštinės erdvės baziniais vektoriais
∇ = e1∂
∂x1+ e2
∂
∂x2+ e3
∂
∂x3≡ e1∂x1 + e2∂x2 + e3∂x3 . (6.70)
Atvirkštinė bazė reikalinga tam, kad apskaičiuotume kryptines, (6.37) formulėjeapibrėžtas, išvestines ∂ei f = (ei ·∇)f = ∂f/∂xi bazinių vektorių ei kryptimis.Rezultatas toks:
t1 = ∂e1f = e1 − (2x1 + x2)e3,
t2 = ∂e2f =1
2e1 +
√3
2e2 −
(x1 +
x2
2
)e3,
t3 = ∂e3f = e1 .
(6.71)
Kokia (6.71) vektorių ti geometrinė prasmė? Norėdami tai išsiaiškinti trimatėjeerdvėje iš eilės užfiksuokime po vieną iš formulės (6.69) koordinačių xi. Gausi-me tris paviršius. Kiekvienos paviršių poros sankirta duos po kreivę. Pasirinkime

140 6 skyrius
kokį nors tašką ir raskime šioms kreivėms liestines tame taške. Tai ir bus mūsųkryptinės išvestinės. Iš tikrųjų, kai fiksuojame koordinatę x3 = c3, gaunamedvimatį paviršių f(x1, x2, c3).
Kai c3 = 0,35, šios šeimos paviršių S pavaizdavome 6.5 paveiksle. Pa-pildomai užfiksavę dar vieną iš kintamųjų x1 (arba x2) šiame paviršiuje nupie-šime dvi kreives (pilkos linijos ant paviršiaus), kurios kirsis mūsų pasirinkta-me taške (x1, x2) = (c1, c2) = (1,−1). Kitaip tariant, viena linija paviršiu-je yra f(x1, c2, c3), o kita f(c1, x2, c3). Apskaičiuokime šioms kreivėms liesti-nes taške (c1, c2, c3). Jos sutaps su jau rastomis kryptinėmis išvestinėmis: t1 =∂f(x1, c2, c3)/∂x1 = e1 − (2x1 + c2)e3 ir t2 = ∂f(c1, x2, c3)/∂x2 = 1
2e1 +√32 e2 − (c1 + 1
2x2)e3.
Rastieji vektoriai t1 ir t2 yra liestiniai (angl. tangential) paviršiui, todėl juospažymėjome raide t. Lygiai taip pat apskaičiuojame ir bazinį vektorių t3 =∂f(c1, c2, x3)/∂x3 = e1, kuris yra liestinis paviršių f(c1, x2, x3) ir f(x1, c2, x3)susikirtimolinijai f(c1, c2, x3) taške (c1, c2, c3). Taigi, kryptinės išvestinės (6.71)yra ne kas kita, kaip paviršių, įdėtų į trimatę erdvę, susikirtimo kreivių liestinės,kurias geometrinėje algebroje apskaičiuojame su skaliariniais diferencialiniaisoperatoriais arba skaliariniais nabla ei ·∇. Svarbu įsidėmėti, kad skirtingai neguįprastoje dvimatėje plokštumoje, paviršiams liestinių vektorių poros ti, tj, ku-rios užduoda bazinius plokštumos vektorius, priklauso nuo pasirinkto paviršiaustaško x. Kitaip tariant, judant paviršiumi liestinė plokštuma su ją sudarančiaisliestiniais baziniais vektoriais trimatėje erdvėje kažkaip sukiojasi.
Taigi, taško judėjimą ant paviršiaus matematiškai galima aprašyti dvejopai.
1. Trimačio išorinio stebėtojo požiūris: taškas juda ant paviršiaus vienadimensija didesnėje plokščioje Euklido erdvėje. Šis aprašymas ma-tematiškai yra paprastas, nes erdvėje egzistuoja globali ortonormuotavektorių bazė.
2. Vidinio stebėtojo požiūris: taškas juda „kreivoje“ paviršiaus erdvėje irapie trimatės erdvės egzistavimą stebėtojas nieko nežino. Toks aprašy-mas matematiškai sudėtingas, nes baziniai vektoriai keičiasi pereinantnuo taško prie taško.
Deja, kaip minėjome, paprastesnis aprašymas įmanomas tik tada, jei paviršių ga-lima įdėti į viena dimensija didesnę Euklido erdvę, o tai ne visada įmanoma.Dvimačio paviršiaus, kurio negalima įdėti į trimatę erdvę, pavyzdys galėtų bū-ti Kleino butelis. Tai paviršius, kuris yra gaunamas sujungus laisvus Möbiusojuostelės kraštus. Jį galima įdėti tik į keturmatę Euklido erdvę. Naudingo mate-matinio formalizmo kaip dirbti dviem dimensijom didesnėje erdvėje iki šiol nėra,todėl išmokti skaičiuoti kreivose erdvėse fizikams tebėra svarbu.

Laukai: kaip juos diferencijuoti bei integruoti 141
Ką tik aprašyta vektorių t1 ir t2 radimo procedūra užtikrina, kad jie yra liesti-niai paviršiui. Tačiau kaip yra su vektoriumi t3? Ar jis statmenas mūsų paviršiui?Geometrinėje algebroje tai nesunku sužinoti, apskaičiavus sandaugą (t1∧t2) ·t3.Jei paviršius t1 ∧ t2 yra statmenas vektoriui t3, ši vidinė sandauga turi būti lyginuliui. Paprastas apskaičiavimas rodo, kad t1 ∧ t2 =
√32
Äe12+(2x1+x2)e23
ä.
Padauginę iš t3 = e1 randame −√32 e2, t. y. t3 nėra statmenas paviršiaus elemen-
tui t1 ∧ t2. Koks tada vektorius šiame taške yra statmenas paviršiui? Lengva pa-
tikrinti, kad tai yra vektorius ⋆(t1∧t2) = (t1∧t2)I−1 =√32
Ä(2x1+x2)e1+e3
ä,
kur I žymi trimatės erdvės pseudoskaliarą I−1 = −I = −e1 ∧ e2 ∧ e3.Iš to, kas pasakyta, galime teigti, kad trimatėje Euklido erdvėje statmenas
paviršiui yra atitinkamas atvirkštinės bazės vektorius t3 = k ⋆(t1∧ t2) = k(t1 ∧t2)I
−1 = −kI(t1 ∧ t2), kur k kol kas nežinomas daugiklis (skaliaras). Jį nu-statysime iš dualumo sąlygos (6.60), t. y. pareikalavę, kad t3 · t3 = 1. Arba1 = −(kI(t1 ∧ t2)) · t3 = −kI(t1 ∧ t2 ∧ t3), kur pasinaudojome pseudoska-liaro iškėlimo iš vidinės sandaugos (4.26b) taisykle. Matome, kad nežinomasnormavimo daugiklis k išsiprastina ir trimatės Euklido erdvės atvirkštinės bazėsvektoriai yra
t1 =⋆(t2 ∧ t3)
⋆(t1 ∧ t2 ∧ t3), t2 =
⋆(t3 ∧ t1)⋆(t1 ∧ t2 ∧ t3)
, t3 =⋆(t1 ∧ t2)
⋆(t1 ∧ t2 ∧ t3). (6.72)
Pagal šias formules apskaičiuoti (6.71) bazės atvirkštiniai vektoriai, kurie stat-meni atitinkamoms paviršių poroms, yra
6.6 pav. Neortogona-lios bazės plokštumoje.Bazinis vektorius t1 yrastatmenas t2, o t2 stat-menas t1, t. y. t1 · t1 =t2 · t2 = 1
t1 =− 1√3e2 −
1
2x1 + x2e3,
t2 =2√3e2,
t3 =e1 +1
2x1 + x2e3 .
(6.73)
Nesunku patikrinti, kad kiekvienam i = 1, 2, 3 tiesio-ginės ir atvirkštinės bazės vektoriai tikrai tenkina sąlygąti · ti = 1 (sumos nėra). Skaitytojas gali patikrinti ir darvieną gražią šių vektorių savybę, būtent
∑3i=1 t
i∧ti = 0.Todėl Cl3,0 algebros atveju normuoti (bet ne ortogona-lūs) baziniai vektoriai tenkina sąlygą
∑3i=1 t
iti = 3.
6.19 pavyzdys. Patikrinsim (žr. 6.6 paveikslą), kad dvima-tėje erdvėje bet kokiems tiesiškai nepriklausomiems vekto-

142 6 skyrius
riams t1, t2 atvirkštiniai vektoriai, yra
t1 =⋆t2
⋆(t1 ∧ x2)= −t2
t1 ∧ t2
|t1 ∧ t2|2,
t2 =⋆t1
⋆(t2 ∧ t1)= t1
t1 ∧ t2
|t1 ∧ t2|2.
(6.74)
Iš tiesų, dvimatėje erdvėje sandauga t1 ∧ t2 yra proporcinga pseudoskaliarui kI, t. y.I = (t1 ∧ t2)/|t1 ∧ t2|. Be to, kadangi I2 = −1, tai I−1 = −I. Todėl
t1 · t1 =t1 ·(− t2
t1 ∧ t2
|t1 ∧ t2|2)= −t1 · (t2I)
|t1 ∧ t2|= − 1
|t1 ∧ t2|(t1 ∧ t2)I = −II = 1,
kur vėl pasinaudojome pseudoskaliaro iškėlimo iš vidinės sandaugos (4.26b) taisykle.Panašiai patikriname ir kitą atvejį t2 · t2 = 1. Taip pat matome, kad skaičiuodami t2 · t1gausime nulį, nes išraiškos skaitiklyje vietoje t1 ∧ t2 atsiras t2 ∧ t2 = 0.
6.5. Diferencijavimas kreivoje erdvėje
Geometrinės algebros diferencialinį arba nabla operatorių (6.3) apibendrin-sim daugiamatėms plokščioms erdvėms tokiu būdu:
∇ = e1∂
∂x1+ e2
∂
∂x2+ · · ·+ en
∂
∂xn GEOMETRINĖSALGEBROS NABLA
≡ ei∂i .
(6.75)
Atkreipkit dėmesį į indeksų padėtį, kurie visi dabar užrašyti viršuje. Spindulys-vektorius, kuris nusakon-matės erdvės taško koordinates, yrax = x1e1+x
2e2+· · ·+ xnen ≡ xiei. Taigi, ∇ ir x yra išskleisti dualiose bazėse. Jei su ∇ paveik-sime x, gausime
∇x = ei∂ixjej =
∂xj
∂xi(eiej) = δij(e
iej)
= eiei = ei · ei + ei ∧ ei = ei · ei + 0 = n .
(6.76)
Kaip ir turi būti, atsakymas yra erdvės dimensija n, kurią trimatėje erdvėje bedualios bazės jau buvome apskaičiavę 6.5 pavyzdyje.
Be to, prieš tai buvusiame skyriuje išsiaiškinome, kad vektorinės funkci-jos f(x1, x2, x3) = f1e1 + f2e2 + f3e3 liestinius vektorius ti išilgai kreiviųf(x1, c2, c3), f(c1, x2, c3) ir f(c1, c2, x3) galima apskaičiuoti pagal formulę
ti = (ei ·∇)f = eℓ∂f ℓ
∂xi, (6.77)
kuri rodo, kad diferencijuodami pagal koordinatę su viršutiniu indeksu gauna-me bazinį vektorių su apatiniu indeksu. Analogiškai samprotaujant galima tikė-tis, kad dualios bazės tangentinį vektorių tk panašiu būdu pavyks užrašyti per

Laukai: kaip juos diferencijuoti bei integruoti 143
atvirkštinės vektorinės funkcijos, kurią galima gauti koordinates xi(f1, f2, f3)išreiškus per fk, kryptines išvestines:
tk = ∇xk(f1, f2, f3) = ej∂
∂f jxk(f1, f2, f3) =
∂xk
∂f jej . (6.78)
Ir iš tiesų, tokiu būdu gautas dualus liestinis vektorius tikrai yra statmenas ti, kąnesunku patikrinti, apskaičiavus vidinę abiejų liestinių vektorių sandaugą:
tk · ti =∂xk
∂f jej · eℓ
∂f ℓ
∂xi=∂xk
∂f jδjℓ
∂f ℓ
∂xi=∂xk
∂f j∂f j
∂xi=∂xk
∂xi= δki . (6.79)
Rašome Kroneckerio deltą funkciją, nes kreivalinijinės koordinatės yra nepri-klausomi dydžiai, t. y. keičiant vieną koordinatę kitos koordinatės nesikeičia.
Norėdami apibendrinti (6.75) nabla operatorių kreivoms erdvėms, turimeEuklido koordinates tiesiog pakeisti kreivalinijinėmis, t. y. galime rašyti
∇F = ei∂F
∂f i= ei
∂xk
∂f i∂F
∂xk= tk
∂F
∂xk. (6.80)
Taigi, bendru atveju nabla operatorių reikia skleisti ne tiesioginėje, o dualiojekreivalinijinėje bazėje. Dar kartą pabrėšime, kad skirtingai nei ei, bazinių vekto-rių ti ir ti kryptis ir dydis judant kreivu paviršiumi, kaip matyti iš 12.2 paveikslo,kiekviename taške keičiasi. Todėl diferencijuojant tokioje bazėje užrašytą multi-vektorių F reikia diferencijuoti ne tik skleidinio koeficientus, bet ir pačius bazi-nius vektorius ti.
Iš pateiktų formulių matyti, kad jei paviršius (bendresniu atveju — hiperpa-viršius) yra įdėtas į vienetu didesnės dimensijos plokščią erdvę, tada diferenci-juoti yra paprasta. Išties, jei nagrinėjamame paviršiuje pasirinksime kreivaliniji-nę koordinačių sistemą ir ją kiekviename paviršiaus taške papildysime paviršiuistatmenu vektoriumi, gausime plokščios 3D erdvės nabla operatorių, tik užrašytąkreivalinijinėje (6.80) bazėje: ∇tūryje = ∇paviršiuje+∇statmenai paviršiui. Arba trum-piau ∇ = ∂ +∇
⊥, kur išilgai paviršiaus veikianti išvestinė vadinama vektorineišvestine. Kitaip tariant, vektorinė išvestinė∂ = ∇−∇
⊥ yra plokščioserdvės∇operatoriaus projekcija į liestinę erdvę (angl. tangent space). Taigi, apibrėžimasyra matematiškai nepriekaištingas, nes nepriklauso nuo pasirinktos konkrečiospaviršiaus parametrizacijos. Jei vietoje kreivo paviršiaus paimsime plokštumą,tada ∂ virs dvimačiu nabla operatoriumi ∇(2), o ∇ = ∇(2) + ∇⊥ virs mumsgerai žinomu plokščios trimatės erdvės nabla. Kreivos trimatės erdvės pavyzdysgalėtų būti kristalas su vidiniais įtempimais ar deformacijomis. Jei tokio krista-lo taške užduosim e1, e2, e3 bazę, kuri nusako vieną elementarią gardelę, taiperėjus į kitą kristalo vietą, elementari gardelė, o tuo pačiu ir bazė, išsikraipys.

144 6 skyrius
Fizikos vadovėliuose kristalų įtempimai ir deformacijos aprašomi ketvirto rangotenzoriais, o tai atitinka perėjimą iš kreivos trimatės į plokščią keturmatę erdvę.
Iš aukščiau pateiktų samprotavimų išplaukia, kad diferencijuodami išilgaidvimačio paviršiaus, įdėto į trimatę erdvę, panašiai kaip (6.80) formulėje, išreikš-tai galime rašyti
∂ = tu(u, v)∂u+ tv(u, v)∂v , (6.81)
kur tu ir tv yra paviršiui dualios liestinės bazės vektoriai. Kiek vėliau 12.14 pa-vyzdyje pademonstruosime, kaip tokią vektorinę išvestinę apskaičiuoti konkre-čiam dvimačiam paviršiui. Čia tik pastebėsime, kad nors pats vektorinės išves-tinės operatorius ∂ yra apibrėžtas liestinėje erdvėje, tačiau gali atsitikti taip, kadveikiant į multivektorių, kuris taip pat priklauso liestinei paviršiaus erdvei, gali-me gauti rezultatą, kuris jau nepriklausys liestinei erdvei, t. y. vektorinė išvestinėnėra tradicinė kovariantinė išvestinė.
6.20 pavyzdys. Paimkime plokštumą, kurią nusako lygtis z(x, y) = 3x + 2y ir ap-skaičiuokime plokštumai statmeną, liestinius bei šiems atvirkštinius vektorius.
Pirmiausia plokštumą z(x, y) įdėkime į trimatę erdvę:
f (x) = xe1 + ye2 + (3x+ 2y)e3 . (6.82)
Liestinius vektorius, kurie guli pačioje plokštumoje, randame iš (6.77) formulės:
t1 = e1 + 3e3, t2 = e2 + 2e3. (6.83)
Plokštumai statmeną vektorių randame bivektoriui t1 ∧ t2 pritaikę dualumo operaciją:
n = ⋆(t1 ∧ t2) = t1 ∧ t2I−1 = −3e1 − 2e2 + e3. (6.84)
Patikriname, kad n tikrai statmenas abiem liestiniams vektoriams: n ·t1 = 0, n ·t2 = 0.Atvirkštinius vektorius apskaičiuojame pagal (6.74) formulę,
t1 = 17 (−3e1 + 5e2 + e3), t2 = 1
14(5e1 − 6e2 + 3e3). (6.85)
Patikriname, kad jie irgi guli plokštumoje: n · t1 = 0, n · t2 = 0. Taip pat nesunkupatikrinti, kad gauti vektoriai tenkina sąlygą t1 · t1 = t2 · t2 = 1, kuri reiškia, kadplokštumoje gulintys vektoriai sudaro statų kampą, kaip 6.6 piešinyje. Jei plokštumojeįvesime kintamuosius u ir v, kurie keičiasi išilgai vektorių t1 ir t2, tada dvimatis vekto-rinis operatorius (6.81) mūsų parametrizuotoje plokštumoje bus ∂ = t1∂/∂u+t2∂/∂v.Kampo tarp t1 ir t2 kosinusas yra lygus t1 · t2/(|t1||t2|) = −3
√2/5, o tai reiškia, kad
plokštumos vektorinis operatorius∂ yra užrašytas neortonormuotoje2D bazėje t1, t2.Ją ortogonalizavę ir sunormavę t1, t2 gausime vektorinį dvimatį ∇(2) operatorių. Pa-viršinį ∂ operatorių papildantis vienmatis diferencijavimo operatorius yra ∇
⊥ = n∂w,kurw yra kintamasis išilgai bazinio vektoriaus n = n/|n|. Taigi, vietoje senos ortonor-muotos e1, e2, e3 bazės gavome naują, taip pat ortonormuotą bazę t1, t2, n, kuriosdu baziniai vektoriai guli paviršiaus plokštumoje, o trečias yra statmenas paviršiui.

Laukai: kaip juos diferencijuoti bei integruoti 145
6.6. Orientuotas integravimas išilgai paviršių⋆
Grįškime prie integravimo problemos geometrinėje algebroje. Viską, ką kal-bėjome apie vienmačius orientuotus integralus (6.57), galima apibendrinti inte-gralams ˆ
SF dXG , (6.86)
išilgai dvimačio ar daugiamačio paviršiaus S, kur pointegrinės funkcijos F ir Gyra multivektoriai. Pavyzdžiui, jei paviršius S yra dvimatis, tai jo be galo mažasorientuotas paviršiaus elementas yra bivektorius dX = dB. Šiuo atveju teori-ja, tiesa, išeina gerokai sudėtingesnė. Integravimo išilgai kreivės uždavinys yrasąlygiškai paprastas, nes kiekvienai kreivei, nesvarbu, ar tai būtų tiesė, ar sudė-tinga daug kartų save kertanti kreivė, visada egzistuoja natūralus teorinis para-metras. Būtent, tašką ant bet kokios kreivės galima nusakyti atstumu, kuriuo jisnutolęs nuo laisvai pasirinkto pradinio kreivės taško. Šis parametras yra univer-salus ir mums visai nesvarbu, kokiose koordinatėse nagrinėjama kreivė užduota— Dekarto, sferinėse ar kokiose nors kitose kreivinėse koordinatėse. Šį natū-ralų parametrą ir panaudojome 6.16 pavyzdyje. Dvimačiams ir daugiamačiamspaviršiams, deja, tokio visur tinkančio parametro surasti jau nepavyksta ir tenkanagrinėti atskirus atvejus. Skirtingai nei vienmatei kreivei, dabar neįmanoma netteoriškai kokiunors universaliu būdu nusakyti visų taškų padėtis ant skirtingųpa-viršių. Todėl prieš pradedant integruoti tenka atsižvelgti į paviršiaus topologiją.Jei vieną paviršių galima deformuoti į kitą įvairiai juos tampant, tarsi abu jie būtųpagaminti iš gumos, tokie paviršiai laikomi topologiškai vienodais. Tačiau, jeikaip, pavyzdžiui, plokštumos ir sferos atveju, norint iš vieno paviršiaus gauti kitątenka kurį nors iš jų perpjauti ar susiūti, tuomet paviršiai laikomi topologiškaiskirtingais. Žinoma, kreivės taip pat gali būti topologiškai skirtingos, kaip pa-vyzdžiui, apskritimas ir tiesė, bet universali parametrizacija ir tai, kad vienmačiuatveju dualios ir tiesioginės bazės vektoriai visada lygiagretūs, integruojant leidoį jų topologijąnekreipti dėmesio. Deja, skirtingadaugiamačių paviršių topologijadaro integravimo teoriją daugiamatėse erdvėse kur kas sudėtingesnę. Tradiciškaiši teorija griežtai formuluojama įvedant tokias sąvokas kaip daugdara (angl. ma-
nifold), atlasas, simpleksas, kompleksas, grandinė (angl. chain) ir t. t. Geomet-rinėje algebroje apibrėžiamos „vektorinės daugdaros“ (angl. vector manifolds),kuriose, atrodo, viską galima suformuluoti paprasčiau ir išreikštai neįvedant lo-kalių koordinačių sistemų (atlaso). Deja, tai per platūs klausimai, todėl nuo šiolvisas pastangas nukreipsime svarbiausiam rezultatui, būtent, pagrindinei analizėsteoremai, kurios daliniai atvejai yra Stokes’o ir Gausso teoremos, apibendrinti.
Prisiminkime, kaip apibrėžiamas orientuotas (antros rūšies) paviršinis integ-ralas (angl. flux integral). Laikykime, kad trimatėje Euklido erdvėje esantį pavir-

146 6 skyrius
6.7 pav. Integravimas išilgaipaviršiausS ir aplink jo kraštą,kuris pavaizduotas strėlėmis
šių S aprašo parametrai u ir v, t. y. SÄx(u, v)
ä.
Tegu F(x) yra ant to paviršiaus apibrėžtas mul-tivektorinis laukas. Paviršių laikysime orientuo-jamu2, todėl paviršiaus elementą žymėsime rašy-tiniu šriftu dS . Srauto integralu per paviršių Svadinsime dvimatį integralą¨
SF(x)dS =
¨
AFÄx(u, v)
ä
×Ätu(u, v)∧ tv(u, v)
ädA ,
(6.87)
kurdA = dudv yra parametrų pokyčių sandauga(neorientuotas, ploto dimensiją turintis dydis), otu(u, v) ir tv(u, v)yra vektorinio laukox dalinės
išvestinės pagal apatiniame indekse nurodytus parametrus, tu(u, v) =∂x(u,v)∂u
ir tv(u, v) = ∂x(u,v)∂v . Jos užduoda paviršiui liestinę (tiesioginę) bazę kiekvie-
name kreivo paviršiaus S taške. Duali šiai paviršiui liestinei bazei yra atvirkš-tinių vektorių tu(u, v) ir tv(u, v) bazė. Kaip matėme iš 6.5 paveikslo, bendruatveju abiejų bazių vektoriai nesutampa, tu(u, v) 6= tu(u, v). Išorinė sandaugatu(u, v) ∧ tv(u, v) formulėje (6.87), kuri užduoda bivektorinį lauką paviršiujeS, labai primena jakobianą kintamųjų pakeitimo dvimačiame (neorientuotame)integrale. Jei apskaičiuotume jo normą |tu(u, v) ∧ tv(u, v)|, pamatytume, kadtai iš tiesų ir yra kintamųjų pakeitimo jakobianas, kurio prasmė yra elementarauspaviršiaus plotelio prieš ir po kintamųjų pakeitimo dydžių santykis taške (u, v).
Norėdami surasti ryšį tarp paviršinių ir kreivinių integralų apskaičiuokimeorientuotą vienmatį integralą išilgai 6.7 paveiksle pavaizduotos kreivės C =C1 ∪ C2 ∪ C3 ∪ C4, kurios elementarus orientuotas ilgis ds. Integralą išskai-dykime į keturis, kuriuose, einant išilgai integravimo krašto, keičiasi tik vienasiš parametrų. Pavyzdžiui judant išilgai kreivių C1 ir C3 keičiasi tik u, o v yrafiksuotas. Būtent v vertė išilgai kreivės C1 yra 0, o išilgaiC2 ji lygi 1,
ˆ
C1∪C2∪C3∪C4
F(x)ds =
ˆ
C1
F(x)ds+
ˆ
C2
F(x)ds+
ˆ
C3
F(x)ds+
ˆ
C4
F(x)ds
=
ˆ 1
u=0
FÄx(u, 0)
ätu(u, 0)du+
ˆ 1
v=0
FÄx(1, v)
ätv(1, v)dv
+
ˆ 0
u=1
FÄx(u, 1)
ätu(u, 1)du+
ˆ 0
v=1
FÄx(0, v)
ätv(0, v)dv .
(6.88)
3Klasikinis neorientuojamo paviršiaus pavyzdys yra Möbiuso juosta, gaunama persukus irsuklijavus popieriaus juostelę.

Laukai: kaip juos diferencijuoti bei integruoti 147
Kaip minėta, formulėje tu ir tv žymi vektorinio lauko išvestinę pagal atitinkamąparametrą, t. y. tu = ∂x
∂u ir tv = ∂x∂v . Pavyzdžiui, jei spindulys-vektorius, kuris
nusako paviršiaus taškus, parametrizuotas kaip x = (x, y, z) = (u, v, g(u, v)),
tada tu =Ä1, 0, ∂g(u,v)∂u
äir tv =
Ä0, 1, ∂g(u,v)∂v
ä.
Integralus sugrupuokime pagal tai, kuris iš parametrų keičiasi, ir juos užra-šykime mūsų tikslui patogesniu pavidalu:
ˆ
C1∪C3
F(x)ds =
ˆ 1
u=0
(FÄx(u, 0)
ätu(u, 0)− F
Äx(u, 1)
ätu(u, 1)
)du
= −ˆ 1
u=0
Lj 1
v=0
∂
∂v
(FÄx(u, v)
ätu(u, v)
)dv
ådu ,
(6.89)
kur pertvarkydami pasinaudojome tapatybe
1ˆ
v=0
∂
∂v
(FÄx(u, v)
ätu(u, v)
)dv = F
Äx(u, v)
ätu(u, v)
∣∣∣∣1
v=0
=FÄx(u, 1)
ätu(u, 1)− F
Äx(u, 0)
ätu(u, 0) .
(6.90)
Atitinkamai antrai integralų porai gaunameˆ
C2∪C4
F(x)ds =
ˆ 1
v=0
(FÄx(1, v)
ätv(1, v)− F
Äx(0, v)
ätv(0, v)
)dv
=
ˆ 1
v=0
Lj 1
u=0
∂
∂u
(FÄx(u, v)
ätv(u, v)
)du
ådv.
(6.91)
Sudėję abu rezultatus turimeˆ
C1∪C2∪C3∪C4
F(x)ds =
ˆ
C2∪C4
F(x)ds+
ˆ
C1∪C3
F(x)ds
=
ˆ 1
v=0
Lj 1
u=0
∂
∂u
ÄF tvädu
ådv −
ˆ 1
u=0
Lj 1
v=0
∂
∂v
ÄF tuädv
ådu
=
¨
A
ÄFutv + F tvu − Fvtu − F tuv
ädA =
¨
A
ÄFutv − Fvtu
ädA,
(6.92)
kur Fu = ∂F∂u ir Fv = ∂F
∂v , o tuv = ∂2x∂u∂v = ∂2x
∂v∂u = tvu yra dalinės išvestinėspagal (komutuojančius) parametrus. Kaip matome, viso šios pertvarkos rezul-tatas labai primena srauto integralą (6.87). Patikrinkime savo spėjimą vietoje

148 6 skyrius
multivektoriaus F paėmę paprastą skaliarinį lauką f ir apskaičiuokime jo vekto-rinės išvestinės ∂f , taigi, vektoriaus, integralą išilgai paviršiaus S (sumos pagalpasikartojančius indeksus u ir v nėra),¨
S
∂f dS =
¨
S
Ätu∂uf(u, v) + tv∂vf(u, v)
äÄtu(u, v)∧ tv(u, v)
ädA.
(6.93)
Prisiminę, kad dvimatėje erdvėje dualios erdvės vektorius galime apskaičiuotipagal (6.74) formules, kuriose dabar t1 = tu ir t2 = tv, ir jas įstatę į (6.93)turime¨
S
Ç−tvÄtu ∧ tv
äÄtu ∧ tv
ä∂uf(u, v)|tu ∧ tv|2
+ tuÄtu ∧ tv
äÄtu ∧ tv
ä∂vf(u, v)|tu ∧ tv|2
ådA
=
¨
S
ÇtvÄtu ∧ tv
äÄtv ∧ tu
ä∂uf(u, v)|tu ∧ tv|2
− tuÄtu ∧ tv
äÄtv ∧ tu
ä∂vf(u, v)|tu ∧ tv|2
ådA
=
¨
S
Ä∂uf(u, v)tv − ∂vf(u, v)tu
ädA .
(6.94)
Palyginę su (6.92) formule matome, kad abi išraiškos dabar visiškai sutampa.Tokiu būdu išvedėme specialų pagrindinės analizės teoremos atvejį, būtent
¨
S
∂f dS =
˛
C
fds , (6.95)
sakantį, kad skaliarinės funkcijos integralas uždaru kontūru lygus tos funkcijosvektorinės išvestinės integralui išilgai kontūro apriboto paviršiaus. Tradicinėjeanalizėje šis rezultatas žinomas kaip Stokes’o teorema. Kaip geometrinėje algeb-roje apskaičiuojami (6.95) pavidalo integralai parodysime 12 skyriuje.

7. Elektromagnetinis laukas ir Cl3,0 algebra
Elektromagnetinio lauko (EM) teorija savo esme yra reliatyvistinė teorija, to-dėl ir jos matematinis aparatas turėtų remtis keturmačio erdvėlaikio sąvokomis.Tačiau elektrodinamikos vadovėliai, tarp jų ir lietuviškieji [18, 19], su šia teorijamus pirmiausia supažindina pasitelkdami klasikinį vektorinį skaičiavimą, kurisistoriškai O. Heaviside’o ir J. W. Gibbso tam ir buvo sugalvotas. Tačiau vektori-nis skaičiavimas neleidžia aprašyti judančių kūnų elektrodinamikos, pavyzdžiui,A. Fizeau eksperimentų su šviesa judančiuose skysčiuose. Jis netinka ir apra-šant optiniu aktyvumu pasižyminčias terpes, nes abiem šiais atvejais elektrinisir magnetinis laukai virsta vienas kitu, todėl kalbėti apie juos kaip apie atskiruslaukus negalime. Lygiai tokį patį vaizdą stebime ir geometrinėje algebroje. Čiaelektromagnetiniam laukui aprašyti taip pat naudojamos dvi algebros: klasikinėCl3,0 ir reliatyvistinė Cl1,3. Maxwello lygtys Cl3,0 algebroje yra labai panašiosį įprastines elektrodinamikos lygtis. Manysime, kad skaitytojas su jomis jau yrasusipažinęs iš minėtų knygų, todėl didžiausią dėmesį skirsime Maxwello lygčiųperrašymui į Cl3,0 algebros pavidalą. Perrašytų lygčių naudą pademonstruosimeišspręsdami keletą žinomų uždavinių. Tuo tarpu reliatyvistinės Cl1,3 algebroslygtys tradicinio vektorinio skaičiavimo analogų neturi. Elektromagnetinį laukąCl1,3 algebroje aptarsime 11 skyriuje. Ten pamatysime, kad lyginis Cl1,3 algeb-ros poalgebris Cl+1,3 yra izomorfiškas Cl3,0, todėl abi geometrinės algebros yratampriai tarpusavyje susijusios.
7.1. Maxwello lygtys Cl3,0 algebroje
7.1.1. Integralinis pavidalas. Tradiciniai elektrodinamikos vadovėliai tvir-tina, kad magnetinė indukcija B yra aksialinis vektorius. Šio aksialinio vek-toriaus, dar vadinamo pseudovektoriumi, analogas Cl3,0 algebroje yra bivekto-rius B. Todėl tradicinį magnetinės indukcijos vektorių B ir Cl3,0 bivektorių siejadualumo ryšys
B = ⋆B = BI−1 = −IB ⇔ B = IB, (7.1)
149

150 7 skyrius
7.1 pav. Magnetinė indukcijapavaizduota aksialiniu vekto-riumi B ir bivektoriumi B
kurį paaiškina 7.1 paveikslas. Jame bivektorius Bpavaizduotas orientuota plokštuma, kurios plotaslygus magnetinės indukcijos dydžiui |B|. Tradi-cinis aksialinis vektorius B yra statmenas minėtaiplokštumai, o jo kryptį nustato bivektoriaus plokš-tumos orientacija.
Pirmasis Faraday’aus dėsnis teigia, kad laikekintantis magnetinės indukcijos1 srautas per pavir-šiųS jį ribojančiame uždarame kontūre (kilpoje)Csukuria Eevj stiprumo elektrovaros jėgą (evj),
d
dt
ˆ
Sds B =
˛
Cdl E ≡ Eevj . (7.2)
Čia skrituliukas žymi tradicinę vektorių skaliarinę sandaugą. Pirmasis narysyra pseudovektorinio lauko B integralas per paviršių S. Jis ir yra vadinamassrautu. Paviršių kiekviename taške nusako jam statmenas vektoriukas ds, todėlpointegrinis reiškinys ds B yra skaliaras. Antrasis integralas yra vektoriniolauko integralas išilgai kontūro C. Pastarąjį kiekviename taške nusako kontūruiliestinis vektoriukas dl, todėl sandauga dl E taip pat yra skaliarinis dydis.
Faraday’aus dėsnį pervesti į geometrinę algebrą labai paprasta. Tereikia pri-siminti, kad tiek dviejų vektorių, tiek ir dviejų bivektorių vidinė sandauga yraskaliaras,
d
dt
ˆ
SdS · B =
˛
Cdl ·E . FARADAY’AUS DĖSNIS Cl3,0 (7.3)
Pirmajame integrale paviršiaus elementą nusako jau ne statmenas paviršiui vek-torius, o orientuotas plotelisdS (bivektorius). Atitinkamai magnetinis laukas yrapakeistas magnetinio lauko bivektoriumi B.
Ampere’o dėsnis tvirtina, kad magnetinio lauko H linijinis integralas kontū-ru C lygus pro kontūro ribojamą paviršių pratekančios visos srovės J dydžiui.Šiame dėsnyje vietoje magnetinės indukcijos vektoriaus B paprastai rašomasmagnetinio lauko vektorius H , nes tada dešinėje pusėje nereikia atsižvelgti įmedžiagos įmagnetėjimo sąlygotas sroves. Pilną srovę tokiu atveju sudaro tik
1SI sistemoje magnetiniu lauku H įprasta vadinti magnetinės indukcijos ir medžiagos įmag-netėjimo M skirtumą, H = µ−1
B −M . Nors elektrostatikoje elektrinis laukas E taip pat yraelektrinės indukcijosD ir poliarizacijosP skirtumasE = (D−P )/ε, tačiau, kaip matyti, formu-lės nėra simetriškos. Iš tikrųjų neatitikimas dar didesnis: kaip rodo Lorentzo jėga (5.41), elektrinįkrūvį veikia elektrinis laukas ir magnetinė indukcija (bet ne magnetinis laukas). Jei naudojameCGS sistemą, asimetrija sumažėja, o vakuume, kai ε = µ = 1 ir P = M = 0, ir visai išnyksta.Vargu ar kas šią istorinę terminijos painiavą dabar jau imsis taisyti.

Elektromagnetinis laukas ir Cl3,0 algebra 151
Diferencialinės Maxwello lygtys
Tradicinis pavidalas Cl3,0 algebroje Lygties rangas
divD = ρ ∇ ·D = ρ skaliarasrotH − ∂tD = J ∇ · H + ∂tD = −J vektoriusrotE + ∂tB = 0 ∇ ∧E + ∂tB = 0 bivektorius
divB = 0 ∇ ∧ B = 0 pseudoskaliaras
7.1 lentelė. Maxwello lygtys diferencialiniu pavidalu. Stulpeliuose užrašytastradicinis pavidalas, jo atitikmuo Cl3,0 algebroje bei lygties rangas. Atkreipkitdėmesį, kad gradiento, divergencijos ir rotoriaus nabla operatorius ∇ = i∂x +j∂y + k∂z skiriasi nuo nabla operatoriaus geometrinėje algebroje ∇ = e1∂x +e2∂y + e3∂z , nes baziniai vektoriai i, j, k komutuoja, o e1, e2, e3 — ne
laisvųjų krūvininkų Jc ir medžiagos poliarizacijos sąlygota slinkties Jd = ∂D∂t
srovės J = Jc + Jd:˛
Cdl H = |J |+ ∂
∂t
ˆ
Sds D . (7.4)
Geometrinei algebrai tinkama forma Ampere’o dėsnį užrašysime abi (7.4) pusespadauginę iš pseudoskaliaro ir pasinaudoję (4.26) taisyklėmis. Gauname tokiąlygtį trivektoriams:˛
Cdl ∧H = I |J |+ ∂
∂t
ˆ
SdS ∧D , AMPERE’O DĖSNIS Cl3,0 (7.5)
kur H = IH jau žymi bivektorinio magnetinio lauko stiprį, o dS = Ids orien-tuoto paviršiaus elementą. Atkreipkit dėmesį, kad gautoje formulėje srovės dy-dis yra padaugintas iš trivektoriaus I , todėl galima spėti, kad ir elektros krūvisgeometrinėje algebroje taip pat bus trivektorius.
Gausso dėsnis sako, kad elektrinės indukcijos srautas per uždarą paviršių yralygus elektriniam krūviui, kurį tas paviršius apgaubia,
˛
Sds D = Q . (7.6)
Kaip ir anksčiau, abi puses padauginę iš I , gauname Gausso dėsnio atitikmenįgeometrinėje algebroje,˛
S
dS ∧D = IQ . GAUSSO DĖSNIS ELEKTRINIAM KRŪVIUI Cl3,0
(7.7)Iš jo matome, kad elektrinis krūvis Q tikrai yra Cl3,0 algebros pseudoskalia-ras IQ.

152 7 skyrius
Kadangi magnetinių monopolių (magnetinių krūvių) gamtoje iki šiol neap-tikta, Gausso dėsnis magnetiniam laukui yra
˛
Sds B = 0 . (7.8)
Geometrinėje algebroje jis įgyja dviejų bivektorių vidinės sandaugos pavidalą˛
S
dS ∧ B = 0 , GAUSSO DĖSNIS MONOPOLIUI Cl3,0 (7.9)
nes Cl3,0 algebroje išorinėdviejųbivektorių sandauga visada lygi nuliui. Keturioslygtys (7.3), (7.5), (7.7) ir (7.9) yra integralinės Maxwello lygtys geometrinėjealgebroje.
7.1.2. Maxwello lygčių diferencialinispavidalas. Diferencialines Maxwel-lo lygtis gausime iš integralinių pasinaudoję Gausso ir Stokes’o teoremomis (žr.12 skyriaus (12.83) ir (12.89) formules), kurios įgalina abi integralinių lygčiųpuses užrašyti po tuo pačiu integralu. Taip pertvarkyti pointegriniai reiškiniaivadinami Maxwello lygtimis diferencialinėje formoje.
Maxwello lygtis Cl3,0 algebroje galima betarpiškai užrašyti ir iš tradiciniųMaxwello lygčių diferencialinėje formoje. Tam tereikia prisiminti, kad magneti-nis laukas bei jo indukcija yra bivektoriai, o elektrinio krūvio tūrinis integralas— pseudoskaliaras. Šios lygtys tradiciniame ir Cl3,0 algebros pavidale surašytos7.1 lentelėje. Pastebėsime, kad krūvio tankis ρ geometrinėje Cl3,0 algebroje yraskaliaras, krūvis — pseudoskaliaras, kurio orientaciją lemia integravimo tūris.Nustatant, kokio rango yra diferencialinė lygtis, reikia prisiminti, kad operato-rius ∇ yra vektorius. Kaip vėliau matysim, Cl3,0 algebroje užrašytas Maxwellolygtis labai paprasta transformuoti į keturmatę Cl1,3 algebrą, nes Cl3,0 yra lygi-nis Cl1,3 algebros poalgebris. Taip pat pastebėsime, kad pirmųjų dviejų lentelėseilučių diferencialinės lygtys nėra homogeniškos. Jos turi laisvus narius, kurieapibūdina elektromagnetinio lauko šaltinius — krūvį ir srovę.
Lentelę 7.1 dar reiktų papildytiLorentzo jėgos formule (5.43), kurią jau anks-čiau esame užrašę geometrinės algebros žymėjimais,
FL = qE − qv · B . (7.10)
Skaliarinė greičio vektoriaus ir magnetinės indukcijos bivektoriaus sandaugareiškia, kad magnetinis laukas veikia tik gulintį bivektoriaus plokštumoje greičiosandą. Kai E = 0 ir krūvis teigiamas,
FL = −|q|v · B = −|q|v‖B . (7.11)

Elektromagnetinis laukas ir Cl3,0 algebra 153
7.2 pav. Greičiu v judančią da-lelę veikia magnetinio lauko jėgaFL = −|q|v · B
Lorentzo jėga, veikianti įelektrintą dalelę, pa-vaizduota 7.2 paveiksle.
7.1 pavyzdys. Parodysime, kaip operatorių ∇
laikant vektoriumi iš Maxwello lygčių, užrašytųtradicine forma, gauti, pavyzdžiui, antrąją 7.1 len-telės Maxwello lygtį.
Tuo tikslu prisiminkime sąryšį tarp vektorinės irišorinės sandaugos, a × b = −I(a ∧ b), ir pseu-doskaliaro iškėlimo iš išorinės sandaugos taisyklę,a ∧ (BI) = (a · B)I. Tada galime rašyti
rotH =∇×H = −I(∇ ∧H) = I(∇ ∧ (HI2)) = I(∇ ∧ (HI)) = I(∇ · H)I
=−∇ · H. (7.12)
Nariai ∂tD ir J yra tikri vektoriai, todėl jie nepasikeičia. Iš čia išplaukia, kad geomet-rinėje algebroje antroji Maxwello lygtis virsta į −∇ · H − ∂tD = J .
Jei mus domina tik elektromagnetiniai laukai, kurie aprašo bėgančias ban-gas, tuomet diferencialines Maxwello lygtis 7.1 lentelėje galima paversti algebri-nėmis. Iš tiesų, tokiu atveju galime rašyti
E,D,B,H = E0,D0,B0,H0 eI(k·r−ωt) , (7.13)
kur eksponentė su pseudoskaliaru rodiklyje nusako plokščią bėgančią bangą, oE0,D0,B0,H0 žymi atitinkamų bangų amplitudes. Visas keturias (7.13) ban-gas įstatę į 7.1 lentelės diferencialines lygtys ir tarę, kad šaltinių nėra, ρ = J = 0,gauname keturių multivektorinių lygčių sistemą:
k ·D0 = 0, k · H0 = −ωD0, (7.14a)
k ∧E0 = ωB0, k · B0 = 0 . (7.14b)
Pirmoji lygtis rodo, kad bangos vektorius k yra statmenas slinkties vektoriui D,o paskutinė — kad jis guli B plokštumoje. Lygčių sistemą (7.14) bus galimaišspręsti tik tada, kai užduosime taip vadinamą konstitucinį sąryšį tarp (E,B)ir (D,H) porų (medžiagos lygtis). Išsprendę (7.14) gausime bangos dispersijosdėsnį (ω priklausomybę nuo k), kuris ir nusakys, kokios bangos sklinda terpėje.
7.2 pavyzdys. Išveskite (7.14) lygtis pasinaudoję Cl3,0 algebros vidinių ir išoriniųsandaugų formulėmis
A = Ia = a1e23 + a2e31 + a3e12, ∇ · a = ∂xa1 + ∂ya2 + ∂za3,
∇ ∧ a = (∂xa2 − ∂ya1)e12 + (∂ya3 − ∂za2)e23 + (∂za1 − ∂xa3)e31, (7.15)
∇ ∧ A = (∇ · a)I, ∇ · A = I(∇ ∧ a) .

154 7 skyrius
7.1.3. Maxwello lygčių užrašymas viena lygtimi. Paprastais atvejais, pa-vyzdžiui, vakuume ar homogeninėje terpėje, geometrinė algebra visas Maxwellolygtis leidžia sujungti į vieną lygtį. Teorijos požiūriu tai labai svarbu, nes toks su-jungimas yra fizikos dėsnių bendrumo ir universalumo požymis. Prisiminkime,kad istoriškai atskiros Maxwello lygtys pradžioje nebuvo susietos tarpusavyje.Tik J. C. Maxwellui iškėlus prielaidą, kad turėtų egzistuoti dar viena srovės rūšis(slinkties srovė), jam pavyko sujungti visas lygtis į vieną suderintą sistemą, kuridabar vadinama jo vardu. Čia nagrinėsime paprastesnį nereliatyvistinį atvejį, kaigalima galvoti, kad egzistuoja du atskiri, negalintys virsti vienas kitu, laukai —elektrinis ir magnetinis. Tokį modelį aprašo Cl3,0 algebra. Bendresnį modelį,reliatyvistinę elektrodinamiką, pasitelkę Cl1,3 algebrą aprašysime 10 skyriuje.
Pirmiausia apibrėžkime multivektorinį lauką F kaip elektrinio lauko vekto-riaus ir magnetinės indukcijos bivektoriaus sumą3:
F = E + B . FARADAY’AUS LAUKAS (7.16)
Apibendrintą multivektorinį lauką F vadinsime elektromagnetiniu (EM) lauku.Gausso (arba CGS) sistemoje elektrinio lauko ir magnetinės indukcijos dimen-sijos sutampa. SI sistemoje magnetinę indukciją dar reikia padauginti iš šviesosgreičio terpėje. Kadangi vektoriai ir bivektoriai nesimaišo, prireikus visada galė-sim išskirti elektrinęarba magnetinę lauko dalis. Paprasčiausia tai atlikti pasinau-dojus apgrąžos involiucija (2.22), kuri keičia tik bivektoriaus, t. y. tik magnetinėsdalies, ženklą. Taigi, apgręžę (7.16) išraišką randame
E =1
2
ÄF+ F
ä, B =
1
2
ÄF− F
ä. (7.17)
Jei E ir B matuojami skirtingais vienetais kaip, pavyzdžiui, yra SI sistemoje,prieš sudedant šiuos dydžius jų dimensijas reikia suvienodinti. Tai nesunku pa-daryti perėjus į kitą (štrichuotą) sistemą, kurioje elektrinį lauką padauginame iš√ε, o magnetinio lauko indukciją padaliname iš
√µ, kur ε ir µ yra skaliarai, va-
dinami elektrine ir magnetine skverbtimi. Panašiai reikia pasielgti ir su elektriniolauko indukcijaD bei magnetinio lauko stipriuH. Toliau nagrinėsim tiesinę izo-tropinę terpę, kurioje D = εE ir H = B/µ, t. y. tokią, kurioje antriniai laukai(D,H) yra proporcingi pirminiams4. Tada pradiniai ir modifikuoti dydžiai bus
3Įdomu, kad savo tritomyje apie eksperimentus su elektra ir magnetizmu M. Faraday’us ne-užrašė nė vienos formulės. Viską jis aiškino geometriniais vaizdiniais ir gailėjosi, kad dėl mate-matinio išsilavinimo stygiaus negali suprasti Ampere’o dėsnio [20].
4Kurie iš laukų yra pirminiai, o kurie — antriniai, iki šiol nėra vieningos nuomonės. Radijoinžinieriai [21] pirminiais laiko porą (E,H), tuo tarpu fizikai — porą (E,B). Mes laikysimėsantrojo požiūrio. Argumentai, kodėl antroji iš nuomonių labiau tikėtina, išdėstyti knygoje [22], opopuliariai — straipsnyje [23]. Bene svariausias argumentas tas, kad šiuo atveju elektrodinamikos

Elektromagnetinis laukas ir Cl3,0 algebra 155
susieti sąryšiais
E =1√εE′ =
1
νE′, B =
√µB′ = τB′, (7.18a)
D =√εE′ = νE′, H =
1√µB′ =
1
τB′, (7.18b)
kur įvedėm santrumpas ν =√ε ir τ =
√µ. Tada (7.16) apibrėžimas virsta
F′ = E′ + B′ = νE +1
τB. (7.19)
Visus laukus7.1 lentelėjepakeitę (7.18a) ir (7.18b) atitikmenimis užrašome Max-wello lygtis modifikuotiems laukams E′ ir B′,
(∇ν) ·E′ + ν(∇ ·E′) = ρ , (7.20a)Ä∇
1
τ
ä· B′ +
1
τ
Ä∇ · B′ä+ ∂ν
∂tE′ + ν
∂E′
∂t= −J , (7.20b)
Ä∇
1
ν
ä∧E′ +
1
ν
Ä∇ ∧E′ä+ ∂τ
∂tB′ + τ
∂B′
∂t= 0 , (7.20c)
(∇τ) ∧ B′ + τ(∇ ∧ B′) = 0 , (7.20d)
kuriose laikome, kad ǫ ir µ gali priklausyti nuo koordinatės. Padauginę (7.20c)lygtį iš ν, o (7.20d) iš 1
τ ir jas sudėję bei pasinaudoję apibrėžimu (7.19) ir tuo,kad 0 = ∇(ν 1
ν ) =1ν∇ν + ν∇ 1
ν , gauname
∇ ∧ F′ + ντ∂B′
∂t− 1
ν(∇ν) ∧E′ +
1
τ(∇τ) ∧ B′ + ν
∂τ
∂tB′ = 0. (7.21)
Panašiai, padauginę (7.20b) lygtį iš τ , o (7.20a) lygtį iš 1ν ir abi sudėję, turime
∇ · F′ + ντ∂E′
∂t− 1
τ(∇τ) · B′ +
1
ν(∇ν) ·E′ + τ
∂ν
∂tE′ =
1
νρ− τJ . (7.22)
Pagaliau sudėję paskutines dvi lygtis, sugrupavę narius ir pasinaudoję savybėmisa · B = −B · a ir a ∧ B = B ∧ a galime užrašyti
∇F′ + ντ∂F′
∂t+
1
ν
ÄE′ ∧∇ν +E′ ·∇ν
ä+
1
τ
ÄB′ ·∇τ + B′ ∧∇τ
ä
+ τ∂ν
∂tE′ + ν
∂τ
∂tB′ = J′,
(7.23)
kur J′ = 1νρ − τJ yra apibendrinta srovė, susidedanti iš skaliaro ir vektoriaus.
dėsnius galima suformuluoti neįvedant metrikos, t. y. galima užrašyti taip vadinamas bemetrinės(angl. premetric) elektrodinamikos (E,B) lygtis, kurios yra svarbios kosmologijoje.

156 7 skyrius
Formulės (7.23) skliausteliuose lengva atpažinti geometrinę sandaugą. Taigi, su-grįžę prie kvadratinių šaknų pažymėjimų ir numetę brūkšnelius gauname tokiąapibendrinančią lygtį:
∇F+√εµ∂F
∂t+E
1√ε
Ç∇√ε+
√εµ∂√ε
∂t
å
+ B 1õ
Ç∇√µ +
√εµ∂√µ
∂t
å= J .
(7.24)
Dabar apibrėžkime diferencialinį operatorių, kurį sudaro skaliaras ir vektorius, irkuris savo forma labai primena d’Alamberto operatorių (6.31),
D = ∇+√εµ
∂
∂t. (7.25)
Dydis 1/√εµ jame reiškia elektromagnetinio lauko sklidimo greitį. Tada formu-
lė (7.24) įgyja pavidalą
DF +E1√εD√ε+ B 1√
µD√
µ = J, (7.26)
kuriame anksčiau įvestą J jau galima pavadinti apibendrintu šaltiniu. Jis susidedaiš skaliaro ir vektoriaus:
J =1√ερ−√
µJ . (7.27)
Tokiu būdu Maxwello lygčių sistemą užrašėme viena lygtimi [24],
DF+EÄD ln
√εä+ BÄD ln
√µä= J. (7.28)
Iš šios Cl3,0 geometrinės algebros kalba užrašytos Maxwello lygties paėmę ska-liarinę, vektorinę, bivektorinę ir trivektorinę dalis (žr. 7.1 lentelę) lengvai išskir-sime atskiras Maxwello lygtis. Pabaigai pastebėsime, kad sutraukdami Maxwellolygtis į vieną manėme, kad terpė yra izotropinė, t.y. ε(x) ir µ(x) laikėme skalia-rinio lauko funkcijomis, kurios yra pakankamai glotnios. Neizotropinei terpei,kur elektrinė ir magnetinė skvarbos priklauso nuo krypties, arba terpėje, kur pa-sireiškia histerezė, panašiai kaip magnete, ji netinka. Kaip minėjome skyriauspradžioje, ji netinka ir tokioms terpėms, kurE ir B laukai virsta vienas kitu. To-kiu atveju reikia taikyti bendresnę Cl1,3 algebrą, kurioje d’Alamberto operatoriųpakeičia keturmatis nabla operatorius (žr. 10 skyrių). Dabar aptarkime kai kuriasišvestos lygties savybes ir atskirus jos atvejus.
7.1.3.1. Tiesiškumas. Diferencialinė lygtis (7.28) yra tiesinė. Tai reiškia,kad jei turime du šaltinius J1 ir J2, kiekvienas iš kurių sukuria laukusF1 ir F2, taišaltinių suma J = J1+J2 sukurs F = F1+F2 stiprumo EM lauką. Kitaip tariant,

Elektromagnetinis laukas ir Cl3,0 algebra 157
atskirų šaltinių sukuriami EM laukai sumuojasi. Šis superpozicijos principas la-bai naudingas sprendžiant sudėtingus uždavinius, nes leidžia uždavinį suskaidytiį paprastesnius — tokius, kuriuos galima išspręsti analiziškai. Galutinį rezul-tatą po to lengva užrašyti susumavus atskirus sprendinius su juos atitinkančiaissvoriais. Toks sprendimo būdas labai plačiai taikomas.
7.1.3.2. Homogeniška terpė. Nariuose su logaritmais (7.28) Maxwello lyg-tyje atsižvelgiama į terpės savybių kitimą bėgant laikui ar keičiantis koordinatei.Jei elektrinė ir magnetinė skvarbos nekinta, Maxwello lygtis labai supaprastėja,
DF = J . (7.29)
Ji yra pirmos eilės. Elektromagnetinės bangos sklidimo lygtį laisvoje erdvėjegausime paėmę J = 0 ir (7.29) padauginę iš dualaus diferencialinio operatoriaus,apibrėžiamo tokiu būdu:
⋆D = ∇−√εµ
∂
∂t. (7.30)
Atlikę veiksmus gauname
F ≡ ⋆DDF = ∇2F− εµ
∂2F
∂t2= 0 , (7.31)
kur ∇2 = yra įprastas Laplace’o operatorius. Šioje lygtyje vektorinė ir bivek-torinė dalys lengvai atsiskiria. Jas atskyrę matome, kad bangos sklidimo lygtyselektriniam ir magnetiniam laukui yra identiškos,
E = 0, B = 0 . (7.32)
Pabrėšime, kad net ir paėmus J = 0 patys atskiri laukaiE irB netenkinaMaxwel-lo elektromagnetinės lygties (7.29). Taigi, laisvoje erdvėje sklinda EM laukas, one atskiri elektrinis ir magnetinis laukai.
7.1.3.3. Simetriškumo savybės. Jei erdvė yra izotropinė (vienoda visomiskryptimis), Maxwello lygtis (7.29) nepasikeičia pasukuskoordinačių sistemą. Taiuniversali, daugeliui fizikinių sistemų būdinga savybė. Čia plačiau aptarsime ki-tą, su pseudoskaliaru (trivektoriumi I) susijusią simetriją.
Iš 4 skyriaus žinome, kad Cl3,0 algebroje trivektorius komutuoja su visaiselementais. Tai reiškia, kad jis komutuoja ir su EM lauko hamiltonianu. Iš Noet-her teoremos, kuri sako, kad kiekvieną tolydžią simetriją atitinka koksnors tvarusdydis, išplaukia, kad turi egzistuoti dar vienas tvermės dėsnis. Norėdami nusta-tyti, kas tai per dėsnis, homogeninėje Maxwello lygtyje, t. y. kai J = 0, atlikimepakeitimą F → eIαF, kur α yra pastovus realusis dydis. Rezultatas yra
∇
ÄeIαF
ä+√εµ
∂
∂t
ÄeIαF
ä= 0. (7.33)

158 7 skyrius
Išdiferencijavę ir suprastinę eksponentinį daugiklį vėl gauname pradinę lygtį. Taireiškia, kad jei F yra Maxwello lygties sprendinys, tai ir eIαF yra tos pačios lyg-ties sprendinys. Daugyba iš eksponentės, kurios argumente yra trivektorius I ,supina elektrinį ir magnetinį laukus. Tuo lengva įsitikinti padauginus ir atskyrusvektorinę ir bivektorinę dalis:
F = E + B → eIα(E + B)= (cosα + I sinα)(E + B)= (E cosα+ IB sinα) + (B cosα+ IE sinα).
(7.34)
Iš rezultato matome, kad elektrinis ir magnetinis laukai iš tiesų susimaišė,
E → E cosα+ IB sinα, B → B cosα + IE sinα . (7.35)
Taigi, lygties „atsparumas“ transformacijai F → eIαF rodo, kad elektromagneti-nėje bangoje „išsilaiko“ tik vientisas EM laukas, o ne kiekvienas iš elektrinio armagnetinio lauko sandų atskirai. Aprašyta Maxwello lygčių savybė buvo paste-bėta dar 1925 m. ir yra žinoma kaip Larmoro ir Reinicho simetrija. Kai po keletodešimtmečių eksponentės rodiklyje esančią konstantą bus sugalvota pakeisti ko-ordinatės funkcija α(x) (t. y. lokalia, „vietine“ konstanta taško x aplinkoje) irpareikalauti, kad po tokio pakeitimo lygties forma vėl nepasikeistų, t. y. lygtisliktų invariantiška, iš jos išsivystys šiuolaikinis sąveikų tarp įvairių laukų aiški-nimo principas. Literatūroje ši lokali, „vietinė“ simetrija (arba invariantiškumas)dar vadinama kalibruotine simetrija (angl. gauge symmetry, gauge invariance).Tai istoriškai nusistovėjęs, tačiau nevykęs pavadinimas, nes niekas nieko čia ne-kalibruoja. Tiesiog fizikinės lygtys pasižymi tam tikra „nekintamumo“ savybe:jų forma nepasikeičia padauginus iš fazinio daugiklio.
7.2. Bėgančios bangos ir jų poliarizacija
Panagrinėkime Maxwello lygties (7.29) sprendinius, kai nėra išorinių šalti-nių, J = 0,
∇F+√εµ∂F
∂t= 0 . (7.36)
Išsiaiškinom, kad laukas F yra vektoriaus ir bivektoriaus suma. Manysim, kadEM banga yra plokščia bėganti banga, kurios ciklinis dažnis ω [25, 26],
F = F0eI(k·r−ωt). (7.37)
Vektorius k vadinamas bangos vektoriumi. Vidinė sandauga k · r rodo, kad erd-vėje turim plokščiąbangą. Užfiksavę jos vertęk·r = const, gauname plokštumoslygtį. Šioje plokštumoje bangos frontas visur yra vienodas, todėl sandaugos k ·r

Elektromagnetinis laukas ir Cl3,0 algebra 159
fizikinė prasmė yra bangos fazė. Jos ženklas rodo bangos sklidimo kryptį. Jeivietoje k · r būtumę parašę |k ∧ r|, turėtume ne plokščią, o cilindrinę bangą.Bendru atveju k · r pakeitę skaliarine funkcija f(k, r) sukonstruotume norimosformos bangos paviršių fiksuotu laiko momentu.
7.3 pavyzdys. Parodysime, kad (7.37) formulėje daugyba iš eksponentės nepakeičiamultivektoriausF pobūdžio, t. y. jis ir toliau išlieka vektoriaus ir bivektoriaus suma. Tampradžioje išskleiskim eksponentę. Kadangi I2 = −1,
eI(k·r−ωt) = cos(k · r − ωt) + I sin(k · r − ωt). (7.38)
Kadangi I rangas lygus 3, tai padauginę amplitudę F0 (vektorių + bivektorių) iš (7.38)gausime bivektorių + vektorių, t. y. tų pačių rangų elementų sumą.
Įstatę (7.37) į multivektorinę bangos lygtį (7.36) išsiaiškinkime, kokia josgeometrinė prasmė. Prisiminę, kad nabla Cl3,0 algebroje yra vektorinė išvestinė,∇ = e1∂x + e2∂y + e3∂z , o bangos amplitudė F0 susideda iš vektoriaus irbivektoriaus, išdiferencijavę randame
I(k−√εµω)F0e
I(k·r−ωt) = 0. (7.39)
Skaliaru v pažymėkime bangos fronto sklidimo greitį v = 1/√εµ > 0 ir gautą
lygtį suprastinkime. Tuo tikslu padauginkim ją iš kairės iš I−1 = −I , o iš dešinėsiš atvirkštinės eksponentės exp
Ä−I(k · r − ωt)
ä. Tai atlikę gauname paprastą
algebrinę lygtį,(vk− ω)F0 = 0. (7.40)
Raskime šios multivektorinės lygties sprendinį. Bangos amplitudę pakeitę vek-toriaus ir bivektoriaus suma, F0 = E0+B0, atskliaudę skliaustus bei geometrinęsandaugą užrašę per vidinę ir išorinę sandaugas, gauto rezultato narius sugrupuo-kime pagal jų rangus: skaliaro, vektoriaus, bivektoriaus ir trivektoriaus,
0 = (vk− ω)(E0 + B0)
= (vk ·E0) + (−ωE0 + vk · B0) + (vk ∧E0 − ωB0) + (vk ∧ B0).(7.41)
Kiekvienas iš skirtingo rango narių atskirai turi būti lygus nuliui. Tai leidžiaužrašyti keturias nepriklausomas lygtis. Pirmoji, skaliarinė lygtis
k ·E0 = 0 , (7.42)
rodo, kad vektoriai k ir E0 yra vienas kitam statmeni. Trivektorinė lygtis
k ∧ B0 = 0 (7.43)
sako, kad k guli magnetinės indukcijos bivektoriausB0 plokštumoje. Iš bivekto-

160 7 skyrius
rinės lygties,vk ∧E0 − ωB0 = 0, (7.44)
išplaukia, kad bivektoriaus B0 plokštumą sudaro k ir E0 vektoriai: B0 = vk ∧E0/ω. Pagaliau vektorinė lygtis,
− ωE0 + vk · B0 = 0, (7.45)
rodo, kad vektoriusE0 yra ne kas kita, o ortogonalik projekcijaB0 plokštumoje,E0 = vk · B0/ω (žr. 4.5 paveikslą). Taigi, galima daryti išvadą, kad nereliaty-vistinėje elektrodinamikoje elektrinio lauko amplitudė E0 ir bangos vektorius kyra vienas kitam statmeni ir guli B0 plokštumoje.
Dabar išveskime bangos dispersijos lygtį, t. y. raskime, kaip bangos dažnis ω(tuo pačiu ir jos energija) priklauso nuo bangos vektoriaus k. Į (7.45) lygtį įstatęiš (7.44) išspręstą B0 turime
− ω2E0 + v2k · (k ∧E0) = 0. (7.46)
Kadangi k⊥E0, tai k∧E0 = kE0 = −E0k, ir išskleidę vidinę sandaugą turime
− ω2E0 +v2
2
Äk2E0 − kE0k
ä= 0 (7.47)
arba− ω2E0 + v2k2E0 =
Ä−ω2 + v2k2
äE0 = 0. (7.48)
Kadangi E0 6= 0 ir v > 0, išvedėme elektrodinamikoje gerai žinomą sąryšį,vadinamą dispersijos lygtimi, tarp bangos dažnio ir bangos vektoriaus vienalytėjeaplinkoje
ω = v|k|. (7.49)
Bangos vektoriaus modulį |k| fizikai vadina bangos skaičiumi.Aptarkime kitas EM lauko savybes. Lygties (7.37) eksponentę perrašę trigo-
nometrinėmis funkcijomis ir įvedę pažymėjimą φ = k · r − ωt, randam
F = E + B = (E0 + B0)Äcosφ+ I sinφ
ä
= E0(cosφ+ I sinφ) + B0(cosφ+ I sinφ).(7.50)
Į pirmąjį narį įeina tik elektrinio, o į antrąjį tik magnetinio lauko amplitudės. Ta-čiau jos nėra nepriklausomos. Išsiaiškinome, kad E0 ir B0 sieja (7.45) sąryšiai,E0 = vk · B0/ω = vkB0/ω = kB0 ir (7.44), B0 = vk ∧E0/ω = vkE0/ω =
kE0, kuriuos pertvarkydami pasinaudojome dispersijos sąryšiu (7.49) bei viene-tinio vektoriaus apibrėžimu k = k/|k|. Taigi, elektrinės ir magnetinės amplitu-dės dydis vakuume yra toks pats, |E0| = |B0|. Todėl visos EM bangos amplitudę

Elektromagnetinis laukas ir Cl3,0 algebra 161
galim užrašyti taip:
7.3 pav. Apskritimiškai poliarizuota elektro-magnetinė banga. Pavaizduotas vienas svyra-vimų periodas bangai sklindant išilgai z ašies.Elektrinis laukas E0 ir bangos vektorius k visąlaiką guli orientuotoje magnetinio lauko plokš-tumojeB0 ∼ k∧E0, kuri sukasi pagal dešiniojosraigto taisyklę aplink k
F0 =E0 + B0 = E0 + kE0
=(1 + k)E0 .(7.51)
Tada bėgančios EM lauko bangosišraiška (7.50) įgyja pavidalą
Fcirc =F0(cosφ+ I sinφ)
=F0eIφ = (1 + k)E0e
Iφ.(7.52)
Kaip netrukus matysime, šią lyg-tį galima užrašyti ir kiek kitokiupavidalu, kuriame I yra pakeistasbivektoriumi Ik,
Fcirc =F0(cosφ+ Ik sinφ)
=F0eIkφ = (1 + k)E0e
Ikφ.(7.53)
Šioje formulėje dydis Ik yrabivektorius, kurio kvadratas lygus−1. Išsiaiškinkime (7.53) formu-lės fizikinę interpretaciją. Kadan-gi (Ik) · k = I(k ∧ k) = 0, taivienetinis vektorius k yra statmenas bivektoriaus Ik plokštumai. Paprastai k nu-kreipiamas bazinio vektoriaus e3 kryptimi ir EM bangos formulė (7.53) rašomapavidalu (1 + e3)E0e
Ie3φ. Eksponentė yra ne kas kita, o geometrinės algebrosrotorius, kuris suka objektus Ie3 plokštumoje, t. y. aplink ašį e3. Kadangi vekto-rius E0 guli magnetinio bivektoriaus B0 plokštumoje, tai formulė (7.50) leidžiatvirtinti, kad abiejų laukų E0 ir B0 fazės keičiasi tuo pačiu ritmu, t. y. sinfaziš-kai. Tuo tarpu iš (7.53) formulės darome išvadą, kad erdvėje jie sukasi (todėllaukas turi žymę circ) apie banginį vektorių k, kaip parodyta 7.3 paveiksle. Tai,kad abu laukai sukasi statmenoje bangos vektoriui k plokštumoje, t. y. pasižymiapskritimine polarizacija, rodo ir (7.37) formulė. Pastebėsime, kad kiekvienasiš (7.50) formulės narių turi savo natūralią geometrinę interpretaciją, todėl nėrajokio reikalo išskirti „realiąją“ ar „menamąją“ dalis, kaip tai tradiciškai daromaelektrodinamikoje. Taip pat norime atkreipti dėmesį į multivektorių (1 + k), o

162 7 skyrius
tuo pačiu ir į (1+e3), kuris gaunamas bangą nukreipus išilgai vektoriaus e3. To-kio pavidalo multivektoriai dažnai pasirodo tada, kai erdvėje egzistuoja išskirtinėašis ar kryptis. Mūsų atveju tokia kryptis yra bangos sklidimo kryptis. Kitameskyriuje nagrinėdami elektrono sukinį matysim, kad lygiai tokio paties pavidalomultivektorius atsiranda dėl sukinio kvantavimo ašies išskirtinumo. Multivekto-rių (1± e3) galima sunormuoti taip, kad jo kvadratas būtų lygus jam pačiam,
Å1± e3
2
ã2=
1± 2e3 + e224
=1± e3
2. (7.54)
Tokią savybę turintys multivektoriai vadinami idempotentiniais arba projekci-niais operatoriais. Iš tiesų, tokiu operatoriu veikiant pakartotinai niekas nesikei-čia. Kitaip tariant, projektuodami projekciją gauname ją pačią. Iš čia išplaukialabai svarbi projekcinio operatoriaus savybė: idempotentinis multivektorius ne-turi atvirkštinio. Tokio operatoriaus pavyzdį jau esame pateikę (4.53) formulėje,kai aiškinomės, ar visi multivektoriai turi atvirkštinius. Matėme, kad negalimerasti multivektoriaus, kurį padauginę iš (1± e3) gautume vienetą.
Idempotentininis multivektorius leidžia rotorių užrašyti įvairiais pavidalais.Pavyzdžiui, rotorių, kurį nusako bivektoriusIe3 = e12 (arba Ik), galima pakeistirotoriumi, kurį nusako pseudoskaliaras I = e123, tokiu būdu:
(1 + e3)eIe3φ = (1 + e3)
Äcosφ+ Ie3 sinφ
ä
= (1 + e3)Äcosφ+ I sinφ
ä= (1 + e3)e
Iφ .(7.55)
Paskutinėje eksponentėje vietoje bivektoriaus, kuris nurodo sukimo plokštumą,dabar turime pseudoskaliarą, kuris yra trimačio tūrio elementas ir savo savybėmis(komutuoja su visais elementais, o kvadratas neigiamas) labai primena įprastąmenamąjį vienetą (žr. pradinę (7.52) lygtį). Priminsim, kad kompleksinėje skai-čių algebroje daugyba iš menamojo vieneto interpretuojama kaip posūkis komp-leksinėje plokštumoje. Mūsų aptariamame pavyzdyje viską į savo vietas sudė-lioja prieš eksponentę stovintis projekcinis multivektorius, nes (1 + e3)Ie3 =(1 + e3)I . Paskutinė (7.55) išraiška yra patogi perrašant formules „kompleksi-niu“ pavidalu arba kai norime jas supaprastinti.
Kita svarbi idempotentinių multivektorių savybė ta, kad jie yra nulio dalik-liai (angl. zero divisors). Tai reiškia, kad nenulinį multivektorių padauginę išidempotentinio multivektoriaus galime gauti nulį. Būtent šia savybe remdamiesiir parodėme, kad ne visi multivektoriai turi atvirkštinius. Nulio dalikliai svarbūsfizikoje. Pavyzdžiui, 9 skyriuje matysime, kad nulinio ilgio vektoriai aprašo švie-sos kūgį reliatyvumo teorijoje. Svarbus jų vaidmuo ir kompiuterinėje grafikoje.

Elektromagnetinis laukas ir Cl3,0 algebra 163
7.4 pav. Tiesiškai poliarizuota elektromagnetinėbanga. Vertikalios strėlės vaizduoja elektrinį lau-ką, o orientuoti apskritimai — magnetinį. Vekto-rius k rodo bangos sklidimo kryptį
Tiesiškai poliarizuotą EM lau-ką gausime susumavę dvi ap-skritimines priešingų poliari-zacijų bangas (7.53) ir rezulta-tą padalinę pusiau:
F =F0
2
(eIe3φ + e−Ie3φ
).
(7.56)Išskleidę eksponentes mato-me, kad sinusai susiprastina irsvyravimai jau vyksta plokštu-moje, kurios padėtis erdvėjefiksuota, t. y. turime tiesiškai poliarizuotą EM lauką,
Flin = F0 cosφ = (1 + k)E0 cosφ , (7.57)
kur, kaip ir anksčiau, φ = k · r − ωt. Apskritimiškai (7.53) ir tiesiškai (7.57)poliarizuotų bangų formulės, o taip pat jas vaizduojantys paveikslai 7.3 ir 7.4,aiškiai rodo, kad elektrinio lauko E0 ir magnetinės indukcijos kE0 svyravimųfazės sutampa, o jie svyruoja toje pačioje B0 plokštumoje, kuri ir nusako bangospoliarizaciją. Šis geometrinis vaizdinys kiek skiriasi nuo tradiciniu vektoriniuskaičiavimu grindžiamos klasikinės elektrodinamikos vaizdinio, pagal kurį tie-siškai poliarizuota banga vaizduojama dviem tarpusavyje statmenais elektrinioir magnetinio laukų vektoriais. Ir tikrai, jei bangą įsivaizduojame kaip dviejųvektorių svyravimą, tampa neaišku, pagal kurį iš vektorių — elektrinį ar magne-tinį — reikia orientuoti jos poliarizacijos vektorių. Vadovėliuose aiškinama, kadpoliarizacijos vektorių reikia orientuoti pagal elektrinio lauko kryptį. Bet kaipmatėme, EM bangoje abu laukai yra lygiaverčiai, o juos sieja Larmoro ir Reini-cho transformacija. Todėl, poliarizacijos tapatinimas vien tik su elektrinio laukovektoriumi perša mintį, kad fizikinis poliarizacinis filtras veikia tik į elektriniolauko sandą. Kaip rodo formulė (7.57) ir 7.4 paveikslas, iš tiesų turime poliari-zacinę plokštumą, kurioje guli abu laukai, tiek elektrinis, tiek ir magnetinis. Abušie laukai svyruoja poliarizacinėje plokštumoje, todėl yra visiškai nesvarbu kurįiš laukų naudosime poliarizacijos plokštumai nusakyti. Jie abu nusako tą pačiąšviesos poliarizaciją. Be to, kaip matyti iš 7.3 ir 7.4 paveikslų, teisinga kalbėtiapie elektromagnetinės bangos poliarizacijos plokštumą. 7.3 paveiksle poliari-zacijos plokštuma sukasi ratu, o 7.4 pav. jos padėtis erdvėje yra fiksuota. Abiematvejais vektorius k guli poliarizacijos plokštumoje. Taigi, galima daryti išva-dą, kad šviesos poliarizacija yra viso EM lauko, o ne vien elektrinio sando, kaipdažnai įsivaizduojama, savybė.

164 7 skyrius
Pabaigai pastebėsime, kad jei elektromagnetinio lauko dažnis ir jo erdvinispaveikslas nesikeičia, pavyzdžiui, banga visą laiką išlieka plokščia, tada poliari-zacijos laisvės laipsnį galima nagrinėti kaip atskirą abstraktų fizikinį dydį. Taipir daroma optinėje poliarimetrijoje.
Elipsinės poliarizacijos bangą gausime sudėję dvi į priešingas puses besisu-kančias skirtingų amplitudžių E+ ir E− bangas,
F = (1 + k)ÄE+e
Ie3φ +E−e−Ie3φ
ä. (7.58)
Manysim, kad k = e3. Tada elektrinis vektorius, kuris yra statmenas k, turi tike1 ir e2 sandus,
E+ = a1e1 + a2e2, E− = b1e1 + b2e2, (7.59)
kur ai ir bi yra skaliarai. Įstatę amplitudes ir išskleidę eksponentes randame
F = (1 + e3)î(α1e1 + α2e2) cosφ+ (β1e1 + β2e2) sinφ
ó
= (1 + e3)î(α1 cosφ + β1 sinφ)e1 + (α2 cosφ+ β2 sinφ)e2
ó
= (1 + e3)[»
α21 + β21 cos(φ− δ1)e1 +
»α22 + β22 cos(φ− δ2)e2
],
(7.60)
kur įvedėme pažymėjimus α1 = a1 + b1, α2 = a2 + b2, β1 = −a2 + b2,
β2 = a1 − b1, cos δ1 = α1/»α21 + β21 ir cos δ2 = α2/
»α22 + β22 . Jei formulė-
je (7.60), kurioje fazė φ = k · r − ωt fiksuotume koordinatės vertę, pavyzdžiui,r = 0, tada laikui t bėgant nariai laužtiniuose skliaustuose brėš elipsę poliariza-cinėje plokštumoje e1–e2. Parenkant skaliarų ai ir bi vertes galima gauti visasgalimas EM lauko poliarizacijas. Pavyzdžiui, paėmę α1 = α2 = 0 iš (7.60) for-mulės gauname tiesiškai poliarizuotą bangą F = (1 + e3)(β1e1 + β2e2) cosφ,kurios išraiška sutampa su (7.57). Kai α1 = −β2 = E0, α2 = β1 = 0, iš(7.60) gauname apskritimiškai poliarizuotą bangą. Bendro pavidalo elipsę nu-sako jos dydžioji ir mažoji pusašės bei visos elipsės pasukimo kampas ašių e1ir e2 atžvilgiu. Taigi, yra tik trys realūs parametrai, kai tuo tarpu lygtyse (7.60)turime keturis. Panagrinėjus atidžiau nesunku įsitikinti, kad poliarizaciją lemiane absoliutiniai kampų δ1 ir δ2 dydžiai, o tik jų skirtumas δ = δ1 − δ2.
Pabaigai apskaičiuokime multivektoriaus F ir apgręžtojo F sandaugą apskri-timinės poliarizacijos bangai (7.53):
1
2FF ≡ 1
2(E − B)(E + B) = 1
2e−Ikφ(E0 − kE0)(E0 + kE0)e
Ikφ
=1
2e−Ikφ(E2
0 − kE20 +E0kE0 − kE0kE0)e
Ikφ
= e−Ikφ(E20 − kE2
0)eIkφ = E2
0 − kE20 = |E0|2 − k|E0|2,
(7.61)

Elektromagnetinis laukas ir Cl3,0 algebra 165
kur sutraukdami narius pasinaudojome vektorių ortogonalumu kE0 = −E0k.Pirmasis atsakymo narys |E0|2 yra skaliaras. Jis nusako apskritimiškai poliari-zuotos EM bangos energijos tankį. Antrasis narys k|E0|2 yra vektorius. Jis rodobangos pernešamos energijos kryptį. Dabar atlikime tuos pačius apskaičiavimusvietoje sąryšioB0 = kE0 naudodami magnetinės indukcijos vektoriųB = −IB,
1
2FF =
1
2(E − B)(E + B) = 1
2(|E|2 + |B|2 + IBE − IEB)
=1
2
Ä(|E|2 + |B|2)− 2E ×B
ää.
(7.62)
Kaip matyti iš gautos išraiškos, pirmasis narys yra EM lauko energijos tankis, oantrasis — Poyntingo vektorius.
7.2.1. Poincaré sfera. Jei trimatėje erdvėje pavaizduotumevisųgalimų švie-sos poliarizacijos vektorių galus, tai visi tokie taškai sudarytų sferą. Ši sfera5
vadinama matematiko H. Poincaré vardu. Tokiu būdu kiekvieną galimą poliari-zaciją atitinka vienas Poincaré sferos taškas.
Realiose kvantinėse sistemose sužadintų lygmenų gyvavimo trukmė yra baig-tinė, todėl atskiri atomai šviesos kvantus išspinduliuoja ne vienu metu. Tai reiš-kia, kad išspinduliuojamų bangų fazės, apskritai kalbant, nėra suderintos. Tačiaujei atomų sąveika su aplinka yra silpna, galima sukurti sąlygas, priverčiančiasdaugumą atomų išspinduliuoti fotonus beveik vienu metu. Tokia šviesa vadina-ma koherentine.
Optikoje koherentinė šviesos poliarizacija nusakoma keturiais Stokes’o pa-rametrais si. Juos galima išreikšti koeficientais ai ir bi, kurie pasirodo elektriniolauko amplitudžių E+ ir E− formulėse (7.59),
s0 = E2+ +E2
− = a21 + a22 + b21 + b22,
s1 − s2e12 = 2E+e1E−e2 = 2(a1b1 − a2b2)− 2(a1b2 + a2b1)e12, (7.63)
s3 = E2+ −E2
− = a21 + a22 − b21 − b22 .
Koherentinės šviesos poliarizacijos vektorių galai guli ant Poincaré sferos pavir-šiaus. Todėl koherentinei šviesai Stokes’o koeficientai tenkina sąlygą
s20 = s21 + s22 + s23 . (7.64)
Iš ai ir bi koeficientų sudarykim tokį nenormuotą rotorių (skaliaras + bivekto-rius):
R = a1 − a2Ie3 − b1Ie2 + b2Ie1 . (7.65)
5Griežtai kalbant, rutulys, jei įskaitysim nepoliarizuotą arba nepilnai poliarizuotą šviesą, norsmokslinėje literatūroje jis vis tiek vadinamas Poincaré sfera.

166 7 skyrius
Jo modulis lygus
RR = a21 + a22 + b21 + b22 = s0 =»s21 + s22 + s23 . (7.66)
Paimkime bazinį vektorių e3, kurio kryptimi nukreiptas bangos vektorius k, irpasukime jį šiuo rotoriumi. Gausime kitą vektorių
s = Re3R = s1e1 + s2e2 + s3e3. (7.67)
Jei apskaičiuotume s, pamatytume, kad jo projekcijos s1, s2 ir s3 sutampa suoptiniais Stokes’o parametrais (7.63), o šio vektoriaus ilgis yra |s| = s0. Vadi-nasi, bet kurį vektorių, kurio galas guli ant vienetinės Poincaré sferos paviršiaus,nusako formulė
sP =Re3R
RR=
s
s0. (7.68)
Todėl varijuodami koeficientus ai ir bi užduodame tašką ant Poincaré sferos ir tuopačiu atitinkamą bangos poliarizaciją. Pavyzdžiui, kai a1 = a2 = 0, randame,kad sP = −e3 nepriklausomai nuo bi verčių. O kai b1 = b2 = 0, matome, kadsP = e3 nepriklausomai nuo ai. Šie atvejai atitinka pietinį ir šiaurinį Poincarésferos polius, o fizikinėje erdvėje — priešingo ženklo apskritimines poliarizaci-jas. Kai a1 = b1 ir a2 = b2, gauname sP =
Ä(b21 − b22)e1 + 2b1b2e2
ä/(b21 + b22).
Polinėje koordinačių sistemoje, kurią nusako kampas ϕ bei amplitudė b0 ir ku-rioje b1 = b0 cosϕ, o b2 = b0 sinϕ, randame, kad sP = e1 cos 2ϕ + e2 sin 2ϕ.Kadangi s2P = 1, tai ši lygtis aprašo Poincaré sferos pusiaujo apskritimą, koefi-cientai ai = bi duoda normuotus elektrinius laukus E+ = E− = (e1 cosϕ +e2 sinϕ)/
√2 . Kaip jau matėme, lygybė E+ = E− reiškia, kad šviesos po-
liarizacija yra tiesinė. Tokiu būdu Poincaré sferos pusiaujo taškai reiškia visasgalimas tiesines šviesos poliarizacijas. Nesunku suprasti, kad judant nuo pusiau-jo link pietinio ir šiaurinio poliaus Poincaré sferos taškai aprašys visas galimaselipsines poliarizacijas.
Taigi, formulė (7.68) rodo, kad šviesos poliarizaciją galima nusakyti vekto-riumi s, o optinį prietaisą, kuris keičia šviesos poliarizaciją, rotoriumi R. Perei-nant nuo vieno Poincaré sferos taško prie kito tereikia parinkti atitinkamą rotorių.Keičiant vektoriaus s ilgį, galima aprašyti šviesos nekoherentiškumą. Taigi, geo-metrinė algebra puikiai tinka optinių prietaisų darbui modeliuoti. ApibendrintiStokes’o parametrai, kurie vadinami Muellerio matrica, geometrinėje algebrojeaprašyti darbe [27].
7.3. Kraštinės sąlygos
Sprendžiant elektrodinamikosuždavinius tenka nurodyti, kokias kraštines są-lygas sprendinys turi tenkinti. Pavyzdžiui, jei nagrinėjame dviejų terpių sandūrą,

Elektromagnetinis laukas ir Cl3,0 algebra 167
Laukas Kraštinės sąlygosTradicinės Geometrinės algebros
Elektrinis tangentinis E1t = E2t E1t = E2t
statmenas D1n −D2n = σn D1n −D2n = σnMagnetinis tangentinis H1t −H2t = i × n B1t = B2t
statmenas B1n = B2n H1n −H2n = i ∧ n
7.2 lentelė. Kraštinės sąlygos elektriniam ir magnetiniam laukui tradiciniamevektoriniame skaičiavime ir geometrinėje algebroje. Indeksai n ir t atitinkamaižymi medžiagų 1 ir 2 sandūros paviršiui statmeno ir liestinio EM lauko sandus.Vienetinis vektorius n nukreiptas statmenai sandūros paviršiui, o srovės vekto-rius i guli paviršiuje. Bivektoriai B1,2t guli sandūros pviršiuje, kaip parodyta7.5 paveiksle, o H1,2n yra jam statmeni
elektrinė ε ir magnetinė µ skvarbos sandūroje paprastai keičiasi labai sparčiai,šuoliškai. Todėl elektromagnetinis laukas taip pat patiria šuolį. Kiekvienoje išterpių pirminius laukus (elektrinį E ir magnetinį B) bei antrinius laukus (D irH) tarpusavyje sieja taip vadinamos medžiagos lygtys, kurios apibendrintai va-dinamos konstituciniais sąryšiais (angl. constitutive relations),
D = εE +P , H = µ−1B −M , (7.69)
ir kuriose elektrinės ir magnetinės poliarizacijos vektoriai P ir M efektyviaiaprašo surištųjų krūvių įtaką. Perėjus į geometriną algebrą, elektrinis laukas irsu juo susijusi poliarizacija P išlieka vektoriais. Tačiau magnetinis laukas ir joindukcija virsta bivektoriais, todėl perrašydami (7.69) formules pakeičiame šiųraidžių šriftus,
D = εE +P , H = µ−1B −M. (7.70)
Konstitucinis sąryšis (7.70) vadinamas adityviu, nes į medžiagos savybės atsi-žvelgiame įvesdami papildomą vektorių ir bivektorių. Tačiau patogiauyra naudo-tis multiplikatyviais konstituciniais sąryšiais, kurie pirminius ir antrinius laukussusieja paprasta tiesine transformacija. Tokiu atveju jokių papildomų medžiagoslaukų įvesti nereikia. Paprasčiausi multiplikatyvių konstitucinių sąryšių pavyz-džiai yra D = εE ir B = µH.
Dviejų medžiagų sandūroje taip pat gali atsirasti ir paviršiniai krūviai ar pa-viršinės srovės, kurios irgi keičia laukus. Ploto vienetui tenkantį paviršinį krūvįpažymėsim raide σ [Q/m2], o paviršinę srovę i [A/m]. Sąryšiai tarp statmenųsandūrai ir jai liestinių (lygiagrečių, tangentinių) EM lauko sandų randami iš in-tegralinių Maxwello lygčių. Tai padaroma sandūrą apsupus uždaru kontūru arbapaviršiumi ir pritaikius atitinkamai Stokes’o arba Gausso teoremas. Sutraukiant

168 7 skyrius
7.5 pav. Kraštinių sąlygų geometrinė inter-pretacija magnetiniam laukui
kontūrą ar paviršių riboje gaunamassąryšis tarp elektrinio arba magne-tinio lauko sandų vienoje ir kitojesandūros pusėje. Skaičiavimų de-tales galima rasti vadovėliuose apieelektrą ir magnetizmą [18]. To-kiu būdu rasti sąryšiai yra pateikti7.2 lentelėje. Iš jos matome, kadkraštinės sąlygos elektriniam lau-kui išlieka nepakitusios, o magneti-niam laukui užrašomos kiek kitaip,nes vektorius tenka keisti bivekto-riais (statmenom plokštumom).
Abu indukcijų B1t = B2t bivektoriai guli sandūros paviršiuje, t. y. jie yraliestiniai paviršiui, kaip pavaizduota 7.5 paveiksle. Ši sąlyga atitinka statmenosandūrai magnetinės indukcijos vektoriaus sando tolydumo B1n = B2n reikala-vimą. Kita vertus, kaip tai matyti iš sąlygosH1t−H2t = i×n, magnetinio laukovektoriaus tangentinio sando trūkio dydis yra lygus paviršiuje tekančiai srovei i,kuri yra vektorius.
Iš 7.5 paveikslo taip pat matome, kad geometrinėje algebroje ši sąlyga inter-pretuojama kaip orientuotas paviršių plotų skirtumas. Iš tiesų, paviršius i ∧ n
yra statmenas sandūrai, o sandų H1n ir H2n plotai abiejose sandūros pusėse yraskirtingi. Jų skirtumas ir lygus i ∧ n. Paviršinės srovės ir statmeno sandūraivienetinio ilgio vektoriaus išorinė sandauga yra bivektorius. Tik šis bivektoriusir keičia jam lygiagrečių bivektorių plotus. Kadangi sandūros plokštumoje esan-tis bivektorius yra statmenas i ∧ n, tai kertant sandūrą jis savo ploto nekeičia.Daugiau apie šiuos klausimus rašoma knygoje [24].
Dabar užrašykime kraštines sąlygas Faraday’aus laukuiF. Įvedę tangentiniusEM laukus pirmoje ir antroje terpėse,
F1t = E1t + B1t, F2t = E2t + B2t, (7.71)
bei pasinaudoję7.2 lentele, tangentinio laukonenutrūkstamumo sąlygą galim per-rašyti labai paprastai:
F1t = F2t . (7.72)
Čia abu laukai, E1,2t ir B1,2t, yra lygiagretūs sandūrai.Norėdami nusakyti kraštines sąlygas sandūrai statmeniems laukams apibrė-
šime vektoriaus D ir bivektoriaus H sumą,
G = D +H = εE +Bµ, (7.73)

Elektromagnetinis laukas ir Cl3,0 algebra 169
kuri nusako EM lauko savybes terpėje su skvarbomis ε ir µ. Tada statmeniemssandams galime rašyti
G1n = D1 +H1, G2n = D2 +H2 . (7.74)
Tokiu pavidalu užrašytos kraštinės sąlygos statmeniems laukams sujungia elekt-rinį ir magnetinį laukus vienoje ir kitoje sandūros pusėje. Abiejų multivektoriųskirtumas yra kitas multivektorius, kurio vektorinė dalis yra statmenas paviršiuivektorius D1 − D1 = σn, kurio ilgis lygus paviršiniam krūviui σ, o bivekto-rinė dalis yra statmenas sandūrai bivektorius H1 − H2 = i ∧ n, kurio plotas(žr. 7.5 pav.) lygus paviršiuje tekančiai srovei,
G1n − G2n = σn+ i ∧ n. (7.75)
Ar užrašytos kraštinės sąlygos dera su E. Noether teoremos teiginiu, kad sukiekviena fizikinės sistemos simetrija yra susijęs koks nors tvermės dėsnis? Mū-sų išnagrinėta dviejų skirtingų begalinių terpių sistema nesikeičia ją stumdantsandūros kryptimi. Kitaip tariant, sistema yra transliaciškai simetriška išilgaisandūros. Todėl iš Noether teoremos išplaukia, kad lygiagretūs paviršiui bangosvektorių sandai vienoje ir kitoje terpėje turi sutapti. Tai reiškia, kad elektriniaiir magnetiniai laukai medžiagų sandūroje taip pat turi būti lygūs, E1t = E2t irB1t = B2t. Šią savybę ir matome 7.2 lentelės paskutiniame stulpelyje. Tuo tarpuiš tradiciškai užrašytų sąlygų suderinamumo su minėta teorema nėra. Painiavaatsirado todėl, kad kraštinės sąlygos vadovėliuose užrašomos naudojant magne-tinio lauko vektorius, o ne, kaip tai būtų teisingiau, bivektorius.
7.4. Snellio ir Fresnelio formulės
7.4.1. Snellio formulė. Panagrinėkime tiesiškai poliarizuotosmonochoma-tinės bangos (7.57) atspindį nuo dviejų dielektrikų sandūros. Pirmąjį dielektrikątegu charakterizuoja skvarbos ε1 ir µ1. Šioje terpėje į sandūrą krintančią bangąpažymėkime indeksu (0), o nuo sandūros atsispindėjusią (1):
F = F0 cos(k0 · r − ωt) + F1 cos(k1 · r − ωt). (7.76)
Antrąjį dielektriką nusako skvarbos ε2 ir µ2 = µ1 ≡ µ, o jame sklinda tik pra-ėjusi pro sandūrą banga, kurios indeksas (2):
F = F2 cos(k2 · r − ωt). (7.77)
Pilno EM lauko amplitudė yra elektrinio vektoriaus ir magnetinio bivektoriaussuma,
Fi = Ei + Bi = Ei(1 + ki), (7.78)

170 7 skyrius
o bangos vektorių ki ir vienetinį sklidimo krypties vektorių ki sieja sąryšis
ki =ω
viki . (7.79)
Jei kaip ir anksčiau sandūrai statmeną vienetinį vektorių pažymėsime raide n, taibivektorius In bus lygiagretus sandūrai orientuotas vienetinio ploto paviršius.Transliacinė simetrija išilgai sandūros (Noether teorema) reikalauja, kad visos kiprojekcijos į sandūrą būtų lygios,
k0 · (In) = k1 · (In) = k2 · (In). (7.80)
Įstatę į jas (7.79) ir prisiminę, kad šviesos greitis terpėje priklauso nuo medžiagoslūžio rodiklio ni = vi/c, kur i = 1 atitinka pirmąją, i = 2 antrąją terpę, o c žymišviesos greitį vakuume ir ω/vi = ωni/c, turime
n1k0 · (In) = n1k1 · (In) = n2k2 · (In). (7.81)
Kadangi ki · (In) = 12
Äki(In)− (In)ki
ä= 1
2 (kin − nki)I = (ki ∧ n)I , taišios sandaugos dydis lygus kampo θi tarp bangos sklidimo krypties vektoriauski ir statmeno paviršiui vektoriaus n sinusui: (ki ∧ n)I = sin θi et, kur et žymitangentinį sandūros paviršiui vektorių. Todėl (7.81) sąryšį galima užrašyti taip:
n1 sin θ0 = n1 sin θ1 = n2 sin θ2. (7.82)
Gautoji išraiška vadinama Snellio formule. Kampas θi čia skaičiuojamas nuo kiiki n. Optikoje įprasta kampus matuoti kitaip — nuo (neorientuotos) sandūraivertikalės. Tai reiškia, kad tradicinius kampus ϕi ir mūsų kampus θi sieja są-ryšiai: ϕ0 = π − θ0, ϕ1 = θ1, ϕ2 = π − θ2. Kadangi sin θi = sinϕi, taidėl to (7.82) lygtis nepasikeičia. Paėmę jos pirmą ir paskutinį narį gauname išfizikos vadovėlių žinomą Snellio dėsnį, susiejantį į terpių sandūrą krintančių irpraeinančių bangų kryptis
n2 sinϕ2 = n1 sinϕ1. (7.83)
Visi trys vektoriai k0, k1 ir k2 guli toje pačioje plokštumoje. Tai reiškia, kadjie tenkina k0 ∧ k1 ∧ k2 = 0. Norint tuo įsitikinti pakanka bangos vektoriussuskaidyti į lygiagrečius ir statmenus sandūrai sandus. Tai matyti ir iš (7.81)formulės.
7.4.2. Fresnelio lygtys. Jos aprašo, kokia EM lauko (šviesos) dalis atsispin-di ir praeina pro dviejų dielektrikų sandūrą, pavaizduotą 7.6 paveiksle. Jei pirma-me dielektrike sklinda krentanti ir atsispindėjusi banga, tai EM laukas šioje sri-tyje yra dviejų laukų superpozicija. Tuo tarpu antrajame dielektrike tada sklindatik praėjusi banga. Turėdami tai mintyje ir pažiūrėję į 7.2 lentelę, kai paviršinių

Elektromagnetinis laukas ir Cl3,0 algebra 171
a) b)
7.6 pav. Poliarizuotos šviesos atspindys, kai a) Ei · n = 0 ir b) Bi ∧ n = 0.Vienetinis bivektoriusIn yra lygiagretus terpių 1 ir2 sandūrai, o n žymi jai statmenąvienetinį vektorių. Kritimo kampas lygus atspindžio kampui ϕ0 = ϕ1
krūvių nėra, σ = 0, elektriniam laukui ir jo indukcijai užrašome tokias kraštinessąlygas:
Ä(E0 +E1)−E2
ä∧n = 0,
Ä(D0 +D1)−D2
ä·n = 0. (7.84)
Panašias sąlygas, kai i = 0, užrašome ir magnetiniam laukui:Ä(H0 +H1)−H2
ä∧n = 0,
Ä(B0 + B1)− B2
ä·n = 0. (7.85)
Kadangi µ1 = µ2 = µ, tai (7.84) ir (7.85) lygtis galime užrašyti vien per elektri-nius laukus: Ä
ε1(E0 +E1)− ε2E2
ä· n = 0, (7.86a)Ä
(E0 +E1)−E2
ä∧ n = 0, (7.86b)Ä
n1(k0E0 + k1E1)− n2k2E2
ä· n = 0, (7.86c)Ä
z−11 (k0E0 + k1E1)− z−1
2 k2E2
ä∧ n = 0, (7.86d)
kur ni = vi/c yra terpės lūžio rodiklis, o zi =»µ/εi jos impedansas. Dielekt-
rikuose šiuos dydžius sieja sąryšis zi = µc/ni. Iš gautos multivektorinės lygčiųsistemos (7.86) apskaičiuosime atspindžio ir pralaidumo koeficientus.

172 7 skyrius
7.4.2.1. Sandūrai statmena banga. Kai šviesos spindulys krenta statmenaisandūrai, bangos vektoriaus k0 projekcija į sandūros plokštumą lygi nuliui,k0·(In) = 0. Iš (7.81) formulės tada išplaukia, kad atsispindėjęs ir prasiskverbęsspindulys taip pat yra statmenas sandūrai, t. y. tenkina sąlygas k0 = −k1 = k2.Taigi, visi elektriniai laukai yra lygiagretūs ir iš lygčių (7.86b) ir (7.86d) gauname
|E0|+ |E1| − |E2| = 0, (7.87a)
z−11 (|E0| − |E1|)− z−1
2 |E2| = 0. (7.87b)
Išsprendę lygčių sistemą krentančio elektrinio lauko amplidudės |E0| atžvilgiurandame
|E1| =Åz1 − z2z1 + z2
ã|E0|, |E2| =
Å2z2
z1 + z2
ã|E0|. (7.88)
Atspindžio ir pralaidumo koeficientais vadinami atitinkamai atsispindėjusios irprasiskverbusios pro sandūrą bangos amplitudės santykis su pradinės krentančiosbangos amplitude,
Rv =|E1||E0|
=(z2 − z1)
(z1 + z2)=(n− 1)
(n+ 1), (7.89a)
Tv =|E2||E0|
=2z2
(z1 + z2)=
2n
(n+ 1). (7.89b)
Paskutiniame stulpelyje, pasinaudoję sąryšiu zi = µc/ni, kaip ir optikos vadovė-liuose bangines varžas pakeitėm santykiniu lūžio rodikliu n = n1/n2. Iš gautųformulių matyti, kad atspindžio ir praleidimo koeficientų skirtumas tenkina sąly-gą T − R = 1.
7.4.2.2. Fresnelio formulės. Kai banga krenta į paviršių bet kokiu kampu,patogu išskirti du nepriklausomus atvejus, Ei · n = 0 ir Bi ∧ n = 0, kuriepavaizduoti 7.6a ir 7.6b paveiksluose. Pirmuoju atveju elektrinis laukas statme-nas n. Iš (7.80) formulės išplaukia, kad tokiu atveju elektriniai laukai statmeniplokštumai, kuri optikoje vadinama bangos kritimo plokštuma. 7.6a paveiksle jisutampa su brėžinio plokštuma. Šios plokštumos lygtis yra k0 ∧ k1 ∧ k2 = 0.
Antruoju atveju, kai Bi ∧ n = 0, 7.6b pav., visi laukai guli kritimo plokš-tumoje. Ši sąlyga, kurią galima užrašyti ir kaip vidinę sandaugą Bi · (In) = 0,sako, kad magnetinio lauko bivektorius Bi guli kritimo plokštumoje.
Pirmuoju atveju, kai Ei · n = 0 ir visų elektrinių laukų amplitudės yra stat-menos n, galime rašyti
(kiEi) ∧ n = ki ∧Ei ∧ n = (n ∧ ki)Ei = sin θiEi, (7.90)

Elektromagnetinis laukas ir Cl3,0 algebra 173
nes ki⊥Ei ir |ki| = |n| = 1. Kampai θi, kuriuos sudaro vienetiniai vektoriai kiir n, yra θ0 = π + ϕ0, θ1 = 2π − ϕ0 ir θ2 = π + ϕ2. Kampai ϕi pavaizduoti7.6a paveiksle. Kadangi laukai lygiagretūs, E0‖E1‖E2, tai iš (7.86b) lygtiesišplaukia sąlyga
|E0|+ |E1| − |E2| = 0 . (7.91)
Kita vertus, pasinaudojus savybeϕ0 = ϕ1 ir sąryšiu zi = µc/ni iš (7.86c) lygtiesmatome, kad
z−11 (−|E0| cosϕ1 + |E1| cosϕ1) + z−1
2 |E2| cosϕ2 = 0 . (7.92)
Iš šių dviejų lygčių išsprendę santykius |E1||E0| ir |E2|
|E0| gauname Fresnelio išraiškasatspindžio ir pralaidumo koeficientams 7.6a paveikslo atvejui:
T⊥ =|E2||E0|
=2z2 cosϕ1
z2 cosϕ1 + z1 cosϕ2, (7.93a)
R⊥ =|E1||E0|
=z2 cosϕ1 − z1 cosϕ2
z2 cosϕ1 + z1 cosϕ2, (7.93b)
Apskaičiavę jų skirtumą matome, kad galioja panaši lygybė, T⊥ −R⊥ = 1.Paveiksle 7.6b pavaizduotu atveju turime sąlygas
Bi ∧ n = (kE) ∧ n = 0 ir Ei · n = Ei cos θi, (7.94)
kuriose kritimo, atspindžio bei lūžimo kampus θi sieja sąryšiai θ0 = π/2− ϕ0,θ1 = 3π/2 + ϕ0, θ2 = π/2 − ϕ2. Tada (7.86) lygčių sistemos pirmosios tryslygtys virsta
ε1(|E0|+ |E1|) sinϕ0 − ε2|E2| sinϕ2 = 0, (7.95a)
(|E0| − |E1|) cosϕ0 − |E2| cosϕ2 = 0, (7.95b)
n1(|E0|+ |E1|)− n2|E2| = 0. (7.95c)
Kadangi zi = µc/ni, tai iš paskutiniųjų dviejų lygčių išsprendę santykius |E1||E0| ir
|E2||E0| gauname Fresnelio atspindžio ir pralaidumo išraiškas antruoju atveju,
R‖ =|E1||E0|
=z1 cosϕ1 − z2 cosϕ2
z1 cosϕ1 + z2 cosϕ2, (7.96a)
T‖ =|E2||E0|
=2z2 cosϕ1
z1 cosϕ1 + z2 cosϕ2. (7.96b)
Gautieji sprendiniai tenkina sąryšį T‖z1z2
−R‖ = 1.Jei antroji terpė yra tankesnė, t. y. jos lūžio rodiklis didesnis, n2/n1 =
z1/z2 > 1, iš Snellio dėsnio išplaukia, kad ϕ2 < ϕ1. R⊥ prilyginę nuliui iš

174 7 skyrius
(7.93a) gauname z1/z2 = cosϕ1/ cosϕ2 > 1. Kadangi ϕ2 < ϕ1, tai šiossąlygos patenkinti neįmanoma. Tačiau prilyginę nuliui R‖ gauname z1/z2 =
cosϕ2/ cosϕ1 > 1. Šią sąlygą patenkinti galima. Kampas, kuriam esant atspin-džio koeficientas virsta nuliu, R‖ = 0, vadinamas Brewsterio kampu ϕ1 = ϕB.Taigi, šviesai krentant į dielektrikąBrewsterio kampu vienas iš poliarizacijos san-dų dingsta. Šia savybe pasinaudojama poliarizuotai šviesai iš nepoliarizuoto šal-tinio gauti. Įprastomis sąlygomis žmogaus akis šviesos poliarizacijos nejaučia,todėl nesuskaičiuojamuose atspindžiuose, kurie mus supa kiekvieną dieną, įdo-maus poliarizacijos reiškinio nepastebime. Tačiau, žmogus gali išlavinti gebė-jimą nustatyti šviesos poliarizaciją, tam tikru būdu žvelgdamas į poliarizuotosšviesos šaltinį, pavyzdžiui, skystųjų kristalų (LCD) ekraną. Tai aiškinama tuo,kad žmogaus tinklainėje esančios taip vadinamosios geltonosios dėmės, kurioscentre yra didžiausia šviesai jautrių ląstelių koncentracija, pigmento molekulėsyra iš dalies apskritimiškai poliarizuotos. Kadangi ši centrinė dalis nėra plokš-čia, o gerokai įdubusi, tai centre ir geltonosios dėmės pakraščiuose esančios mo-lekulės yra orientuotos skirtingai. Dėl šio orientacijų skirtumo pasipraktikavędaugelis žmonių baltame LCD ekrane sugeba pamatyti dvi tarpusavyje statme-nas blankias juostas, — gelsvą ir melsvą. Jos vadinamos Haidingerio šepetėliu(angl. Haidinger’s brush). Melsvosios juostos orientacija sutampa su šviesospoliarizacijos kryptimi.
Visus šio skyriaus sprendinius gavome iš (7.86) sistemos kraštinėms sąly-goms. Tai tiesinė algebrinių lygčių sistema nežinomų laukų atžvilgiu. Ji tinkadielektrikams, magnetikams ir jų kombinacijoms, jei tik sandūroje nėra sugertiesarba ji maža. Pastebėsime, kad nors sistema tiesinė, į ją įeina nekomutuojantysdydžiai. Sistemos sprendinių ieškojome pasinaudodami komutaciniais ir antiko-mutaciniais sąryšiais, taip elementarius multivektorius suvesdami į skaliarus iratitinkamus kampus. Palyginę geometrinės algebros metodą su taikomu vadovė-liuose pamatytume, kad geometrinės algebros metodas yra daug ekonomiškesnisir nuoseklesnis.
Nors Maxwellas savo lygtis užrašė dar prieš atsirandant reliatyvumo teorijai,kaip netrukus įsitikinsime, jas įdėjus į platesnę geometrinę algebrą, būtent į Cl1,3(arba Cl3,1), ir atlikus Lorentzo transformaciją, lygčiųpavidalas nepasikeičia. Taireiškia, kad lygtys yra reliatyvistiškai kovariantiškos. Šiame skyriuje nagrinėjantpoliarizaciją mums pakako lyginio Cl+1,3 poalgebrio, kuris yra izomorfiškas Cl3,0algebrai. Tai ir leido mums aprašyti šviesos poliarizacines savybes naudojantCl3,0 algebrą. Prie Maxwello lygčių mes dar grįšime 10 skyriuje, po to, kai susi-pažinsime su geometrinės algebros taikymu reliatyvumo teorijoje.

8. Schrödingerio-Paulio kvantinė mechanika
Savo žymiąją lygtį, kuri aprašo elektrono kvantines savybes, E. Schrödin-geris užrašė 1926 metais. Deja, ši lygtis neatsižvelgia į tai, kad elektronas turividinį laisvės laipsnį, vadinamą sukiniu. Kaip reiktų aprašyti elektrono sukinįpirmasis sugalvojo W. Paulis. Jis tiesiog paėmė dvi identiškas Schrödingerio lyg-tis ir jas „sukabino“ 2 × 2 matricomis, kurios dabar vadinamos jo vardu. Taipsudaryta dviejų lygčių sistema puikiai tiko nereliatyvistinėms kvantinėms dale-lėms su pusiniu sukiniu nusakyti. Šiame skyriuje pamatysime, kad tris Pauliomatricas σx, σy, σz galima sutapatinti su Cl3,0 algebros baziniais vektoriaise1, e2, e3. Todėl nieko nuostabaus, kad ši algebra puikiai aprašo nereliatyvis-tines daleles su sukiniu 1
2 .Reliatyvistinio elektrono lygtį, kuri atsižvelgia į sukinį, dviem metais vėliau
pasiūlė P.A.M. Diracas. Nuostabu tai, kad reliatyvistinėje lygtyje Diraco įvestosγi matricos pasirodė esančios reliatyvistinės Cl1,3 algebros baziniai vektoriai. Jųvaidmuo, kaip pastebėjo matematikas D. Hestenes [28], yra lygiai toks pat kaipir Paulio matricų Schrödingerio lygtyje. Todėl tiek reliatyvistinę, tiek ir nerelia-tyvistinę kvantinę mechaniką geometrinėje algebroje galima formuluoti visiškaivienodai. Tai svarbu, nes abiejose teorijose galime taikyti lygiai tą pačią ma-tematiką. Šiame skyriuje su elektrono savybėmis susipažinsime pasitelkę Cl3,0algebrą. Reliatyvistinei elektrono lygčiai ir Cl1,3 algebrai skirtas 11 skyrius.
8.1. Paulio matricos
Paulio matricomis vadinamas trijų matricų σ1, σ2 ir σ3 rinkinys,
σ1 =
ñ0 11 0
ô, σ2 =
ñ0 −ii 0
ô, σ3 =
ñ1 00 −1
ô. (8.1)
Šios matricos antikomutuoja,
σiσj + σjσi =
0, jei i 6= j
21, jei i = j, kur 1 =
ñ1 00 1
ô, (8.2)
175

176 8 skyrius
o jų visų kvadratai yra vienetinės matricos, σ21 = σ22 = σ23 = 1. Matricos dartenkina ir gerai žinomus komutacinius sąryšius,
σ1σ2 − σ2σ1 = 2iσ3, (8.3)
kuriuose indeksus galima cikliškai perstatyti.Kadangi matricos (8.1) yra tiesiškai nepriklausomos, tai joms būdingos vi-
sos Cl3,0 algebros bazinių vektorių e1, e2, e3 ir iš jų sudarytų bivektorių beipseudoskaliarų savybės. Ir iš tiesų, sudarę matricų sandaugas
σ1σ2 =
ñi 00 −i
ô, σ2σ3 =
ñ0 ii 0
ô, σ3σ1 =
ñ0 1−1 0
ô, (8.4)
galime įsitikinti, kad veiksmai su jomis duoda lygiai tokius pačius rezultatus kaipir operuojant su bivektoriais e12, e23 ir e31. Pagaliau visų trijų Paulio matricųsandauga
σ1σ2σ3 =
ñi 00 i
ô= i1 (8.5)
komutuoja su Paulio matricomis ir jų sandaugomis, t. y. elgiasi kaip Cl3,0 pseu-doskaliaras I . Iš čia išplaukia, kad Paulio matricų algebra yra izomorfiška Cl3,0algebrai. Kitaip tariant, Paulio matricos yra Cl3,0 algebros atvaizdas. Tokių at-vaizdų algebra turi ir daugiau.
Taigi, trimatės Euklido erdvės algebros Cl3,0 baziniai vektoriaie1, e2, e3 galibūti atvaizduoti Paulio matricomis σ1, σ2, σ3. Spręsdami kvantinės mechanikosuždavinius tuo ir pasinaudosime. Norėdami tai pabrėžti, kaip ir knygoje [13],šiame skyriuje vietoje ei visur rašysime simbolius σi, kurie mums turėtų pri-minti Paulio matricas. Kadangi Ie1 = e123e1 = e23, Ie2 = e123e2 = e31ir Ie3 = e123e3 = e12, tai bivektorius šiame kontekste taip pat rašysim kiekkitokiu pavidalu, būtent Iσ1, Iσ2, ir Iσ3. Atkreipkit dėmesį, kad sandaugoje Iσiraides skiria mažesnis nei įprasta tarpelis, tuo pabėžiant, kad sandaugą galimasuprasti ir kaip vieną simbolį. Prisiminę (4.22) formules σi galime įsivaizduotiir kaip dualius vektorius, statmenus atitinkamoms bivektorinėms plokštumomsIσi. Pavyzdžiui, dualus vektorius σ1 yra statmenas plokštumai Iσ1 = σ2 ∧ σ3.Surašykime visus Cl3,0 algebros bazinius elementus naujais simboliais:
1, σ1,σ2,σ3, Iσ1, Iσ2, Iσ3, I. (8.6)
Kadangi erdvė trimatė, n = 3, bazinių elementų iš viso yra 2n = 8. Visi jieturi aiškią geometrinę prasmę skaliaras, 3 vienetiniai vektoriai, 3 vienetinioploto orientuotos plokštumos, vienetinis orientuotas tūris. Jei norėsime pa-brėžti, kad baziniai elementai nėra susiję su jokia konkrečia koordinačių sistema,

Schrödingerio-Paulio kvantinė mechanika 177
sutrumpintai rašysime
1,σ, Iσ, I= skaliaras, vektoriai, bivektoriai, pseudoskaliaras. (8.7)
Prisiminkime, kad tradiciniame kvantinės mechanikos formalizme Paulio mat-ricos yra abstrakčioje Hilberto erdvėje veikiantys operatoriai. Poaibį σ galimainterpretuoti kaip trimatę erdvę, kurios bazę sudaro vektoriai σ1, σ2 ir σ3. Šiojebazėje galima išskleisti bet kokį tos erdvės vektorių a,
a = a1σ1 + a2σ2 + a3σ3 , (8.8)
kur ai yra skaliarai. Panašiai bet kokią orientuotą plokštumą galime išreikštitrimis baziniais bivektoriais ir skaliarais bij ,
B = b23Iσ1 + b31Iσ2 + b12Iσ3. (8.9)
Užrašas Iσi labai patogus prastinant formules. Kadangi Cl3,0 algebroje pseudo-skaliaras I komutuoja su visais elementais, tai geometrinėje sandaugoje jį galima„stumdyti“ po visą sandaugą. Pavyzdžiui, vietoje (Iσ2)I galime rašyti (Iσ2)I =σ2II = −σ2. Jei formulę išskleistume baziniais vektoriais, tektų atlikti kurkas daugiau veiksmų, (Iσ2)I = (σ1σ2σ3σ2)(σ1σ2σ3) = −σ1σ2σ3σ1σ3 =σ1σ2σ1 = −σ2. Tačiau kai pseudoskaliaras yra išorinėje ar vidinėje sandaugo-je, jo taip paprastai stumdyti jau negalima, nesσ1 ·(Iσ2) 6= Iσ1 ·σ2. Tokiu atvejuvidinę ir išorinę daugybą pirmiausia tektų užrašyti per geometrines sandaugas.
Paimkime bet kokį ermitinį kvantinės mechanikos operatorių, pavyzdžiui,Hamiltono operatoriaus 2× 2 matricą
H =
ñε0 + ε3 ε1 − iε2ε1 + iε2 ε0 − ε3
ô. (8.10)
Jos elementai εi yra realūs dydžiai, kuriuos, kaip tuo nesunku įsitikinti, galimaapskaičiuoti pagal bendrą formulę
εi =1
dTr(Hσi) . (8.11)
Čia Tr žymi pėdsako operatorių, t. y. sudaugintų matricų H ir σi diagonaliniųelementų sumą (pėdsaką). Daugiklis d rodo matricos dimensiją. Mūsų atvejud = 2. Kodėl ši formulė veikia, lengvai suprasime pažvelgę į (8.4) išraiškas.Matome, kad jei i 6= j, visų sandaugų σiσj pėdsakas lygus nuliui. Todėl daugy-ba iš σi matricos ir pėdsako skaičiavimas veikia kaip paprasčiausias projekcinisoperatorius, kuris projektuoja į σi sandą (nes σ2i = 1). Projekcijos vertė atsi-randa vienetinės matricos 1 diagonalėje, todėl ją išskiriame su Tr susumavę vie-nodus diagonalinius elementus sandaugoje ir padalinę iš jų skaičiaus (matricosdimensijos). Formulėje (8.11) vektorių σi galima pakeisti ir bivektoriumi Iσi ar

178 8 skyrius
pseudoskaliaru. Tada rasime atitinkamą jų įnašą į matricą H . Taigi, (8.11) yrauniversali formulė, leidžianti surasti koeficientus prie norimo bazinio elemento.Matricos (8.10) atveju randame:
H = ε0 + ε1σ1 + ε2σ2 + ε3σ3 . (8.12)
Kvantinėje mechanikoje fizikiniai dydžiai užrašomi ermitinėmis matricomis,todėl (8.11) formulė tokias matricas leidžia išskleisti bazėje 1, σ, Iσ, I. Ka-dangi matricų σi ir bazinių vektorių σi daugyba yra izomorfiška, kyla pagun-da kvantinę mechaniką geometrinėje algebroje suformuluoti tiesioghamiltoniane(8.12) nubraukiant nuo σi stogelius, t. y. užrašant
H = ε0 + ε1σ1 + ε2σ2 + ε3σ3 . (8.13)
Tokia prielaida yra kiek per ankstyva ir, kaip netrukus matysime, neteisinga, neskol kas nežinome, kaip ir kuo geometrinėje algebroje pakeisti banginę funkci-ją |ψ〉, į kurią veikia hamiltonianas H . Šį klausimą dabar ir aptarkime.
Koordinatės
Antropologų tyrimai rodo, kad laukinis žmogus pasaulį interpretavo kaip dvi-matį. Tai matyti iš uolosepaliktų piešinių ir senoviniųpaveikslų. Trimatiškumasir ją išreiškianti perspektyva paveiksluose atsirado palyginus vėlai, Renesansolaikotarpyje [29]. Dekarto koordinačių sistema atsirado kaip bandymas sujungtigeometriją ir algebrą, nors paties Dekarto (René Descartes 1596–1650) darbuo-se susikertančių stačiais kampais koordinačių ašių dar nerandame. Koordinačiųsistema, sudaryta iš Paulio matricų, atsirado tik XX a., kartu su Grassmano irCliffordo algebromis. Dėl savo nekomutatyvumo ši koordinačių sistema gebaaprašyti daugiau mus supančios trimatės erdvės savybių, ypač tų, kurios su-sijusios su sukimais. Mokykloje ir universitetuose supažindinama su Dekartokoordinačių sistema, kuri gerai tinka transliacijoms, bet ne sukimams, aprašy-ti. Štai kodėl nagrinėjant pastaruosius vadovėliuose tenka įvesti keistai erdvėjeatsispindinčius ir matematikų nepripažįstamus aksialinius vektorius.
8.2. Spinoriai
Eksperimentai rodo, kad elektrono sukinio projekcijos į bet kurią ašį galiturėti tik dvi reikšmes, trumpai nusakomas „į viršų“ ir „žemyn“. Jei tomis pa-čiomis sąlygomis kartojant eksperimentą kiekvieną kartą gauname vieną ir tą pa-čią sukinio vertę, vadinasi, eksperimento geometrija yra suderinta su pasirinktaelektrono sukinio kvantavimo ašimi. Tačiau jei kartojant eksperimentą matuoja-mos sukinio vertės kaitaliojasi, uždavinio sprendime pasirinkta kvantavimo ašisir eksperimente užduota ašis tarpusavyje nėra suderintos. Išsamiai tai aprašytaknygoje [30].

Schrödingerio-Paulio kvantinė mechanika 179
Spinoriumi vadinsime banginę funkciją, kuri aprašo pusinį sukinį turinčiądalelę, pavyzdžiui, elektroną. Jis turi tik dvi sukiniobūsenas. Jo banginės funkci-jos žymimos ket vektoriais |n, ↑〉 ir |n, ↓〉, kur simbolis n žymi visas kitas dalelėssavybes, nusakomas kokiais nors kvantiniais skaičiais. Pavyzdžiui, elektroną pa-talpinus į rezonatorių, jo energija tampa kvantuota. Šiuo atveju n žymi energijoslygmenis n = 0, 1, 2, . . . Kai kalbame apie elektrono savybes puslaidininkyje,turime nurodyti energijų juostos numerį ir elektronų bangos kvaziimpulsą. Da-bar simbolis n žymi abu paminėtus kvantinius skaičius. Sukinio būseną visadanurodysime atskirai. Kadangi šiuo metu kiti elektrono kvantiniai skaičiai mū-sų nedomina, taupumo dėlei simbolį n praleisim, o elektrono bangines funkcijasžymėsime paprasčiau, tiesog |↑〉 ir |↓〉. Šių spinorių superpozicijos būsena yra
|ψ〉 = α|↑〉+ β|↓〉, (8.14)
kurα irβ dabar žymi kompleksiniusskaičius, tenkinančius sąlygąαα∗+ββ∗=1.Kai operatorius yra matrica kaip, pavyzdžiui, formulėje (8.10), spinorių (8.14)vaizduosime stulpeliu, arba, jei tai bra vektorius, eilute:
|ψ〉 =[ αβ
], 〈ψ| =
îα∗, β∗
ó. (8.15)
Jei, kaip įprasta, sukinio kvantavimo ašį pažymėsim raide z, tada sukinio pro-jektoriaus į šią ašį operatorius yra sz ≡ s3 = λσ3, kur λ priklauso nuo sukinioskaitinės vertės. Elektronui λ = ~/2, jei matuojame SI sistemos vienetais. Teo-riniuose apskaičiavimuose paprastai imama λ = 1. Taip mes toliau ir laikysim.
Apskaičiavę Paulio matricų elementus spinoriams (8.14) ir (8.15), randamevidutines sukinio vertes išilgai x, y ir z ašių,
s1 = 〈ψ|σ1|ψ〉 = αβ∗ + α∗β, (8.16a)
s2 = 〈ψ|σ2|ψ〉 = −i(αβ∗ − α∗β), (8.16b)
s3 = 〈ψ|σ3|ψ〉 = αα∗ − ββ∗. (8.16c)
Iš šių projekcijų sudaryto vektoriaus modulio kvadratas yra
|s|2 = s21 + s22 + s23 =(αβ∗ + α∗β)2 − (αβ∗ − α∗β)2 + (αα∗ − ββ∗)2
= (αα∗ + ββ∗)2=〈ψ|ψ〉2. (8.17)
Jei pagal visus kvantinius skaičius spinorius normuotas į vienetą, nepriklausomainuo paimtų α ir β verčių turime 〈ψ|ψ〉2 = 1. Taigi, vienetinio ilgio vektorius strimatėje erdvėje aprašo sferą, kurią galima parametrizuoti kampais θ ir ϕ,
s1 =sin θ cosϕ, (8.18a)
s2 =sin θ sinϕ, (8.18b)
s3 =cos θ. (8.18c)

180 8 skyrius
Palyginę (8.18) su (8.16) nustatome, kaip koeficientai α ir β išreiškiami per θir ϕ,
α = cosθ
2eiϕ/2, β = sin
θ
2e−iϕ/2. (8.19)
Taigi, bendro pavidalodviejų eilučių spinorių (8.15) parametrizavome dviem rea-liais kampais θ ir ϕ,
|ψ〉 =ñcos θ2e
iϕ/2
sin θ2e
−iϕ/2
ô=
ñcos θ2 cos
ϕ2 + i cos θ2 sin
ϕ2
sin θ2 cos
ϕ2 − i sin θ
2 sinϕ2
ô. (8.20)
Pirmiausia šiose formulėse krinta į akis tai, kad jose yra ne pilnų, o pusiniųkampųtrigonometrinės funkcijos. Tai leidžia įžvelgti analogiją su rotoriumi (4.107),kurio išraiškoje taip pat pasirodo tik pusiniai kampai. Norėdami tuo įsitikinti,pasinaudoję (8.18) užrašykime bet kokį geometrinės algebros vektorių n, kuriogalas guli ant vienetinės sferos paviršiaus,
n = sin θÄcosϕσ1 + sinϕσ2
ä+ cos θσ3. (8.21)
Simboliai σi čia jau žymi bazinius koordinačių sistemos vektorius.Įsivaizduokime, kad pradžioje turime kvantavimo ašies kryptimi nukreiptą
vektoriųσ3. Prisiminę, kad vektorių sukimus geometrinėje algebroje aprašo uni-versali formulė (4.109),
n = Rσ3R , (8.22)
galime paklausti: koks rotorius R vektorių σ3 pasukan kryptimi? Pasirodo, kadtokį posūkį atlieka rotorius
R = e−ϕ
2Iσ3e−
θ2Iσ2
= cos θ2 cosϕ2 + Iσ1 sin θ
2 sinϕ2 − Iσ2 sin
θ2 cos
ϕ2 − Iσ3 cos
θ2 sin
ϕ2 .
(8.23)
Ir tikrai, įstatę (8.23) į (8.22) lengvai patikriname, kad kairėje ir dešinėje pusėsegauname tas pačias išraiškas. Taigi, šis rotorius vektorių σ3 pasuka į vektorių n.
Palyginę (8.15), (8.20) ir (8.23) formules matome, kad Hilberto erdvės Pau-lio spinorių (8.14) ir geometrinės algebros spinorių ψ Euklido erdvėje sieja toksabipusis ryšys:ñ
a0 + ia3−a2 + ia1
ô= |ψ〉 ⇔ ψ = a0 + a1Iσ1 + a2Iσ2 + a3Iσ3 , (8.24)
Cl3,0 SPINORIUS
kur ai yra bet kokie sąlygą 〈ψ|ψ〉= ψψ = ψψ = a20 + a21 + a21 + a23 = 1 tenki-nantys realieji skaičiai. Kaip matyti iš šios sąlygos, to paties spinoriaus apgrąžą

Schrödingerio-Paulio kvantinė mechanika 181
ψ atitinka bra vektorius,îa0 − ia3,−a2 − ia1
ó= 〈ψ| ⇔ ψ. (8.25)
Tačiau jei rotoriai skirtingi, tuomet 〈ψ|φ〉 6= ψφ (žr. (8.39) formulę).Formulės (8.24) ir (8.25) yra ne kas kita, kaip spinoriaus stulpelio/eilutės
pakeitimo Cliffordo algebros spinoriumi-rotoriumi instrukcija. Pavyzdžiui, iš jųišplaukia, kad būsenas su sukiniais, nukreiptais į viršų ir apačią, atitinka tokieCl3,0 algebros elementai (skaliarai ir bivektoriai):
|↑〉 ≡[ 10
]⇔ 1, |↓〉 ≡
[ 01
]⇔ −Iσ2,
(8.26)〈↑| ≡
î1 0
ó⇔ 1, 〈↓| ≡
î0 1
ó⇔ Iσ2.
Jei s = s1σ1 + s2σ2 + s3σ3 yra vidutinis išmatuotas sukinio vektorius, tadarotorius-spinorius ψ leidžia pasukti jį nauja kryptimi pagal tą pačią vektorių su-kimo geometrinėje algebroje taisyklę (4.109),
s′ = ψsψ. (8.27)
Taigi, matuojami vektoriai — šiuo atveju sukinys — fizikinėje erdvėje gali būtipasukti su spinoriumi. Išvada kiek netikėta, nes tradicinėje kvantinėje mechani-koje spinorius mums asocijuojasi su elektrono bangine funkcija |ψ〉. Kvantinėsmechanikos vadovėliuose mokoma, kad fizikinę prasmę turi tik banginės funkci-jos modulio kvadratas. Tačiau matome, kad posūkiams nusakyti vien jo aiškiainepakanka. Šiuo atveju tas pats matematinis objektas (spinorius) vienu metu vai-dina du skirtingusvaidmenis. Vienu atveju jį suprantame kaip sukimo operatorių,kitu — kaip objektą, į kurį toks operatorius veikia. Aptarkime tai detaliau.
8.3. Kvaternioninė kvantinė mechanika
Geometrinės algebros požiūriu kvantinė būsena (8.24), kuri yra skaliaro ir bi-vektoriaus suma, tuo pačiu metu yra ir rotorius, kuris kvantinę sistemą iš būsenosσ3 perveda į kitą būseną. Kaip žinome iš 4 skyriaus, tokie multivektoriai (ska-liaras + bivektorius) dar vadinamas kvaternionais. Kaip matėme iš 4.2 lentelės,jie sudaro lyginį Cl+3,0 Cliffordo algebros poaibį. Šį terminą galima pamatyti netir knygų apie kvantinę mechaniką pavadinimuose, pavyzdžiui, „Kvaternioninėkvantinė mechanika“ [31, 32]. Kita vertus, pats rotorius-spinorius yra sudary-tas iš tų pačių bazinių vektorių, kuriuos jis suka. Taigi, geometrinėje algebro-je išnyksta skirtumas tarp operatorių ir objektų, į kuriuos tie operatoriai veikia.Tai skiriasi nuo tradicinės kvantinės mechanikos formuluotės, kurioje egzistuo-ja dviejų labai besiskiriančių rūšių objektai: Hilberto erdvės vektoriai ir į juosveikiantys Hilberto erdvės operatoriai.

182 8 skyrius
Kaip tradicinės kvantinės mechanikos formules transformuoti į kvaternioni-nės mechanikos? Raskime, pavyzdžiui, Paulio matricos operatoriaus veikimo įket vektorių,
σi|ψ〉 = |ψ′〉 , (8.28)
atitikmenį geometrinėje algebroje. Kaip galima pamatyti iš (8.24) formulės, ketvektoriaus daugybą iš matricos σi atitinka transformacija
σi|ψ〉 ⇔ σiψσ3 (i = 1, 2, 3) . (8.29)
Iš tikrųjų, pavyzdžiui, padauginę iš σ1 matricos randame
σ1|ψ〉 =[ −a2 + ia1a0 + ia3
]⇔ −a2+a1Iσ3−a0Iσ2+a3Iσ1 = σ1ψσ3 . (8.30)
Lygiai taip pat patikriname σ2 ir σ3 matricų veikimą. Atkreipsime dėmesį, kadψσi 6= σiψ, todėl bendru atveju σi negalima perkelti per ψ. Tačiau abu užrašaiψσi ir σiψ galimi. Tai skiriasi nuo tradicinės kvantinės mechanikos susitarimo,kurioje operatorius į |ψ〉 funkciją veikia tik iš kairės. Cliffordo kvantinėje mecha-nikoje operatoriai ir būsenas nusakantys spinoriai yra lygiaverčiai, todėl atliekantskaičiavimus tenka naudotis nekomutatyvinės algebros taisyklėmis.
Žinoti vien daugybos iš Paulio matricų atitikmenis dar nepakanka. Schrödin-gerio lygtyje yra dauginama iš menamojo vieneto, kurio Cl3,0 algebroje apskritainėra. Todėl reikia rasti atitikmenį taisyklei i|ψ〉. Norėdami ją nustatyti, prisimin-kime, kad dauginimas iš vienetinio operatoriaus 1 nieko nekeičia, i|ψ〉 = i1|ψ〉.Todėl i1 galima pakeisti trijų Paulio matricų sandauga
σ1σ2σ3|ψ〉 =[ i 00 i
]|ψ〉 = i1|ψ〉. (8.31)
Iš čia išplaukia, kad i1|ψ〉 atitikmenį geometrinėje algebroje gausime (8.29) tai-syklę pritaikę tris kartus:
i|ψ〉 ⇔ σ1σ2σ3ψσ3σ3σ3 = Iψσ3 = ψIσ3 . (8.32)
Taigi, ket vektoriaus daugyba iš menamojo vieneto i =√−1 ekvivalentiška
padauginimui iš bivektoriaus Iσ3 iš dešinės. Ypatingas šio bivektoriaus vaid-muo yra susijęs su kvantavimo ašies, kuria paprastai imama ašis z, pasirinkimu.Geometrinėje algebroje šią ašį atitinka Iσ3 plokštuma.
Panašiai samprotaudami randame ir kitus tradicinės kvantinės mechanikosoperatorių ir būsenų atitikmenis Cl3,0 algebroje. Visi jie surinkti 8.1 lentelėje.Taškas virš ψ žymi spinoriaus išvestinę pagal laiką, kuris laikomas parametru.Paskutinėje eilutėje užrašėme ir impulso operatoriaus sando px = ~kx veikimą įspinorių.

Schrödingerio-Paulio kvantinė mechanika 183
Hilberto erdvė Cl3,0 algebra Hilberto erdvė Cl3,0 algebra1|ψ〉 ψ σk|ψ〉 σkψσ3
i |ψ〉 ψIσ3 i σk|ψ〉 Iσkψ
(ar + iai)|ψ〉 arψ + aiψIσ3 ∂|ψ〉/∂t ψ
|ψ∗〉 σ2ψσ2 i ∂|ψ〉/∂t Iψσ3
〈ψ| ψ kx|ψ〉 ≡ −i∂|ψ〉∂x −∂ψ
∂x Iσ3
8.1 lentelė. Tradicinės kvantinės mechanikos operatorių ir būsenų atitikmenysCl3,0 geometrinėje algebroje
8.1 pavyzdys. Perveskime iσ3|ψ〉 į geometrinę algebrą. Pasinaudoję 8.1 lentele rašo-me
|ϕ〉 = σ3|ψ〉 ⇔ σ3ψσ3 = ϕ . (8.33)
Pritaikę dar vieną pakeitimą, galutinai turim
iσ3|ψ〉 = i|ϕ〉 ⇔ ϕIσ3 = σ3ψσ3Iσ3 = σ3ψI = Iσ3ψ . (8.34)
8.4. Daugiau taisyklių
Tradicinės kvantinės mechanikos požiūriu eksperimente yra matuojami mat-riciniai elementai 〈ψ|O|ψ〉, kur O žymi matuojamo dydžio operatorių, o |ψ〉 ap-rašo būseną, kurioje tuo metu yra tiriamoji sistema. Kadangi O|ψ〉 duoda kitą ketvektorių, išsamiau išsiaiškinkime, koks yra skirtingų bra ir ket vektorių vidinėssandaugos 〈ψ|φ〉 atitikmuo geometrinėje algebroje. Kai ψ = φ, turime
〈ψ|ψ〉=îψ∗1, ψ
∗2
ó[ ψ1
ψ2
]= ψ∗
1ψ1 + ψ∗2ψ2 . (8.35)
Paėmę ψ1 = a0 + ia3 ir ψ2 = −a2 + ia1 gauname 〈ψ|ψ〉= a20 + a21 + a22 + a23.Geometrinėje algebroje tą patį normuojantį daugiklį gausime padauginę multi-vektorių ψ = a0 + a1Iσ1 + a2Iσ2 + a3Iσ3 iš jam apgręžto multivektoriaus,
〈ψ|ψ〉 ⇔ ψψ = ψψ = a20 + a21 + a22 + a23 . (8.36)
Bendru atveju matricinį elementą sudaro realioji ir menamoji dalys 〈ψ|φ〉=Re〈ψ|φ〉+i Im〈ψ|φ〉. Jei ket vektoriaus |φ〉 sandus užrašysime kaip φ1 = b0+ib3ir φ2 = −b2 + ib1, turėsime Re〈ψ|φ〉= a0b0 + a1b1 + a2b2 + a3b3. Tai sutam-pa su multivektorių sandaugos ψφ skaliarine dalimi 〈ψφ〉 = 〈ψφ〉0, dėl kuriosžymėjimo esame susitarę dar 1 skyriuje,
〈ψφ〉 = 〈ψφ〉 = a0b0 + a1b1 + a2b2 + a3b3 . (8.37)

184 8 skyrius
Menamąją dalį i Im〈ψ|φ〉 = −i(a3b0+a2b1−a1b2−a0b3) atitinka išraiška
− 〈ψφ Iσ3〉Iσ3 = (a3b0 + a2b1 − a1b2 − a0b3)Iσ3 , (8.38)
kurioje kampiniais skliaustais susitarkime žymėti skaliarinės dalies išskyrimo išgeometrinės sandaugos operaciją. (8.38) formulę nesunku išvesti iš lengvai pa-tikrinamos formulės i Im〈ψ|φ〉 = −iRe〈ψ|iφ〉 kompleksinės banginės funkcijoseilutei ψ ir stulpeliui φ. Paskutinis daugiklis Iσ3 formulėje (8.38), kaip matyti iš8.1 lentelės, atitinka daugybą iš menamojo vieneto. Taigi, bendru atveju galimeužrašyti tokią atitikimo formulę:
〈ψ|φ〉 ⇔ 〈ψφ〉 − 〈ψφIσ3〉Iσ3, (8.39)
Kai φ = ψ, ši formulė virsta (8.36). Pasinaudoję (8.26) išraiškomis apskaičiuo-jame ψ projekcijas į būsenas su sukiniu, nukreiptu žemyn ir aukštyn,
〈↓|ψ〉 ⇔ −〈Iσ2ψ〉+ 〈Iσ1ψ〉Iσ3 ,
〈↑|ψ〉 ⇔ −〈ψ〉 − 〈ψIσ3〉Iσ3 .(8.40)
Grižkime prie operatoriaus vidurkio apskaičiavimo. Norimą atitikmenį ra-sime pasinaudoję (8.39) keitimo taisykle ir 8.1 lentele. Jei O|φ〉 yra tradicinėskvantinės mechanikos ket vektorius, jam ekvivalentišką spinorių geometrinėjealgebroje atitinka multivektoriaus funkcija O(φ),
〈ψ|O|φ〉 ⇔ 〈ψO(φ)〉 − 〈ψO(φ)Iσ3〉Iσ3. (8.41)
Pavyzdžiui, paėmę O|ψ〉 = σk|ψ〉 iš pakeitimo taisyklės (8.41) turime O(ψ) =σkψσ3. Tada vidutinė sukinio sando 〈σk〉 vertė yra
〈ψ|σk|ψ〉 ⇔ 〈ψσkψσ3〉 − 〈ψσkψI〉Iσ3, (8.42)
kurios supaprastinimui pasinaudojome savybe σ3Iσ3 = I . Paskutinis šios for-mulės narys lygus nuliui. Tai matyti iš to, kad skaliaro 〈ψσkψI〉 apgrąža duo-
da jį patį, tik su priešingu ženklu: „〈ψσkψI〉 = 〈Iψσk ˜ψ〉 = 〈−Iψσkψ〉 =
−〈ψσkψI〉. Taigi, vidutinė sukinio sando vertė yra tiesiog
〈σk〉 = 〈ψσkψσ3〉 = 〈σkψσ3ψ〉, (8.43)
kur pasinaudoję ciklinio perstatymo (4.17) taisykle (kuri galioja ne tik trivek-toriams, bet ir bet kokio rango projektoriams), paskutiniame žingsnyje cikliškaisukeitėme narius. (8.43) formulę perrašysime patogesniu pavidalu. Tam pastebė-sime, kad sandauga ψσ3ψ yra tik paprastas vektorius. Iš tiesų, kadangi spinoriųψ sudaro vien lyginio rango elementai, tai rango inversija pakeičia sandaugos
ženklą. Kita vertus, apgrąžos involiucija‡ψσ3ψ =
˜ψσ3ψ = ψσ3ψ jos pavidalo
nepakeičia. Pagal 2.1 lentelę tokias savybes turi tik Cl3,0 algebros vektoriai, nes

Schrödingerio-Paulio kvantinė mechanika 185
aukštesnio už trečią rangą elementų šioje algebroje nėra. Todėl galima apibrėžtitokį vidutinio sukinio vektorių:
s =~
2ψσ3ψ . SUKINYS Cl3,0 ALGEBROJE (8.44)
Jo projekcijos yra 〈σk〉 = sk = σk · s, kur k = 1, 2, 3. Jei nekreipsime dėme-sio į skaitinį daugiklį, projekcijų pavidalas sutampa su (8.43). Todėl vektorius saprašo sukinį, kurio projekcijas galima matuoti eksperimentiškai. Tiesa, griež-tai kalbant, vietoje sukinio vekoriaus s, kaip ir judesio kiekio momento atveju,turėtume naudoti sukinio bivektorių S = Is. Prie šio klausimo dar sugrįšime11 skyriuje. Toliau daugiklio ~/2 nerašysim ir keitimo taisyklę perrašysim taip:
〈ψ|σk|ψ〉 ⇔ 〈σks〉 = σk · s . (8.45)
Taigi, galime daryti išvadą, kad geometrinėje algebroje sukinio kvantmechani-nis vidurkis (8.44) yra apibrėžiamas kaip vektoriaus σ3 pasukimas spinoriumi-rotoriumi ψ.
8.5. Dviejų lygmenų modelis
8.5.1. Stacionariosios būsenos. Pritaikykim geometrinės algebros metodąvienai iš paprasčiausių kvantinių sistemų, kuri turi tik du energijos lygmenis. To-kios kvantinės sistemos išsamiai aptartos knygoje [30]. Dviejų lygmenų hamil-tonianas tradiciniame pavidale užrašomas matrica, panašia į (8.10),
H =
ñε0 − ε3 ε1 − iε2ε1 + iε2 ε0 + ε3
ô, (8.46)
kur εi yra realūs skaičiai. Hamiltonianą galima išreikšti Paulio matricomis (8.1),kaip matyti iš (8.12) formulės. Dabar pasinaudokime 8.1 lentele ir mintyse H|ψ〉pakeiskime operatoriumi O|ψ〉, kaip (8.41) formulėje. Tai padarius H|ψ〉 virstamultivektorineψ funkcija
H(ψ) = ε0ψ + (ε1σ1 + ε2σ2 + ε3σ3)ψσ3 . (8.47)
Atkreipkit dėmesį, kad šitaip užrašyta hamiltoninė funkcija skiriasi nuo hamil-toniano (8.13), kuris buvo gautas pasinaudojus izomorfizmu tarp Cl3,0 algebrosir Paulio matricų. Pats (8.13) hamiltonianas teisingas. Pavyzdžiui, pasukus dau-giamatėje erdvėje jį galima diagonalizuoti [33]. Diagonaliniai elementai tuometatitiks sistemos tikrines energijas. Tačiau kaip šiuo hamiltonianu veikti į bangi-nes funkcijas nebuvo aptarta. Tuo tarpu (8.47) išraiška nusako dviejų lygmenųhamiltoniano (8.46) veikimo į (8.15) bangines funkcijas atitikmenį — geometri-nės algebros multivektorinę funkciją. Funkcijos argumentas yra spinoriusψ, ku-rio bendrą pavidalą nusako (8.24) formulė. Pasinaudoję (8.47) išraiška ir (8.41)

186 8 skyrius
taisykle (nenulinį įnašą duoda tik pirmasis taisyklės narys) užrašome dviejų lyg-menų sistemos vidutinės energijos pavidalą tradicinėje kvantinėje mechanikoje irgeometrinėje algebroje:
〈ψ|H|ψ〉 ⇔ ψH(ψ) = ε0ψψ + ψ(ε1σ1 + ε2σ2 + ε3σ3)ψσ3 . (8.48)
Tradicinėje kvantinėje mechanikoje sistemos energijos lygmenys randami iš-sprendus tikrinių verčių uždavinį
H |ψi〉 = Ei|ψi〉, (8.49)
kur Ei žymi ieškomas tikrines energijas, o |ψi〉 — juos atitinkančius tikriniusvektorius, arba, paprasčiau kalbant, bangines funkcijas. Jei H yra matrica, reikiarasti tokius stulpelius |ψi〉 ir tokius jiems tinkančius skaliariusEi, kad (8.49) lyg-tis virstų tapatybe. Tiesinės algebros teorija tvirtina, kad nenuliniai sprendiniaiegzistuoja tik tuo atveju, kai matricos (H −Ei1) determinantas lygus nuliui.
Geometrinėje algebroje (8.49) lygties atitikmuo yra
H(ψi) = Eiψi . (8.50)
Šiuo atveju reikia surasti tokius skaliarus Ei ir tokius spinorius-multivektoriusψi, kurie tenkintų multivektorinę lygtį (8.50). Išspręsime užrašytą tikrinių verčiųuždavinį (8.47) pavidalo hamiltoniano funkcijai.
Tuo tikslu įveskim pagalbinį vektorių
ε = ε1σ1 + ε2σ2 + ε3σ3 , (8.51)
ir hamiltoninę funkciją (8.47) užrašykim glausčiau:
H(ψ) = ε0ψ + εψσ3 . (8.52)
Apskaičiuosim jos tikrines energijas ε±, o po to surasim ir tikrinius multivekto-rius ψ±. Kitaip tariant, išspręsime multivektorinę tikrinių verčių lygtį
H(ψ±) = ε±ψ± , (8.53)
kuri pilnai išskleista dabar atrodo taip:
ε0ψ± + εψ±σ3 = ε±ψ±. (8.54)
Pirmiausia perrašykime (8.54) lygtį rotoriaus pavidalu. Tuo tikslu ją iš dešinėspadauginkim iš σ3, o po to dar ir iš ψ±,
ε0ψ±σ3ψ± + εψ±ψ± = ε±ψ±σ3ψ± . (8.55)
Ieškosime normuoto spinoriaus, t. y. tokio, kuris tenkintų sąlygąψ±ψ± = 1. Ta-da (8.55) lygtis įgyja elegantišką pavidalą, kurį galite palyginti su (8.44) formule,
ψ±σ3ψ± =ε
ε± − ε0. (8.56)

Schrödingerio-Paulio kvantinė mechanika 187
Kadangi ψ± normuotas, kairė gautos lygties pusė yra rotorius, kuris vektoriųσ3 pasuka į vektorių ε. Vektorius σ3 yra vienetinis, o sukimas vektoriaus ilgionekeičia, todėl dešinėje pusėje esantis vektorius turi išliktivienetinio ilgio. Kitaiptariant, (8.56) dešinės pusės kvadratas yra lygus vienetui,
Çε
ε± − ε0
å2
=ε21 + ε22 + ε23(ε± − ε0)2
= 1. (8.57)
Ši sąlyga ir yra energijos kvantavimo sąlyga. Išsprendę ją ε± atžvilgiu, randametikrines energijas,
ε± = ε0 ± |ε| = ε0 ±»ε21 + ε22 + ε23 . (8.58)
Tikrinius multivektorius rasime iš tos pačios rotoriaus lygties (8.56) įstatęatitinkamas energijas ε+ ir ε−,
ψ±σ3ψ± = ± ε
|ε| ≡ ±ε. (8.59)
Kadangi šioje rotoriaus lygtyje pradinis σ3 ir galinis vienetinis ε vektoriai jauyra žinomi, spinorių-rotorių lengva sukonstruoti prisiminus (4.124) formulę. Išjos išplaukia, kad + ženklą lygtyje (8.59) atitinka rotorius-spinorius,
ψ+ = exp
Ç− σ3 ∧ ε
|σ3 ∧ ε|θ
2
å= cos
θ
2− σ3 ∧ ε
|σ3 ∧ ε| sinθ
2, (8.60)
kur θ žymi kampą tarp vektorių σ3 ir ε, kaip parodyta 8.1a paveiksle. Sukimokryptis yra nuoσ3 link ε. Gautas bivektorius automatiškai normuotas, | σ3∧ε
|σ3∧ε| | =1, todėl jame ε galima pakeisti nenormuotu ε,
σ3 ∧ ε
|σ3 ∧ ε| =σ3 ∧ ε
|σ3 ∧ ε| =ε1Iσ2 + ε2Iσ1»
ε21 + ε22= cosϕσ31 + sinϕσ23 , (8.61)
kur pasinaudojome (8.51) formule, iš kurios išplaukia, kad cosϕ = ε1/(ε21 +
ε22)1/2 ir cos(π/2−ϕ) = sinϕ = ε2/(ε
21+ε
22)
1/2. Šis bivektorius 8.1a paveikslepavaizduotas pilkaplokštuma. Paskutinė išraiška (8.61) formulėje yra ne kas kita,o šios plokštumos projekcijos į elementarias bivektorines plokštumas.
Minuso ženklas (8.59) lygtyje atitinka priešinga kryptimi nukreiptą vekto-rių −ε. Pakeitimas ε → −ε ekvivalentiškas kampo θ → θ + π pakeitimui(8.60) formulėje. Todėl vektorių −ε atitinkantis rotorius-spinorius yra
ψ− = exp
Ç− σ3 ∧ ε
|σ3 ∧ ε|(θ + π)
2
å= − sin
θ
2− σ3 ∧ ε
|σ3 ∧ ε| cosθ
2. (8.62)
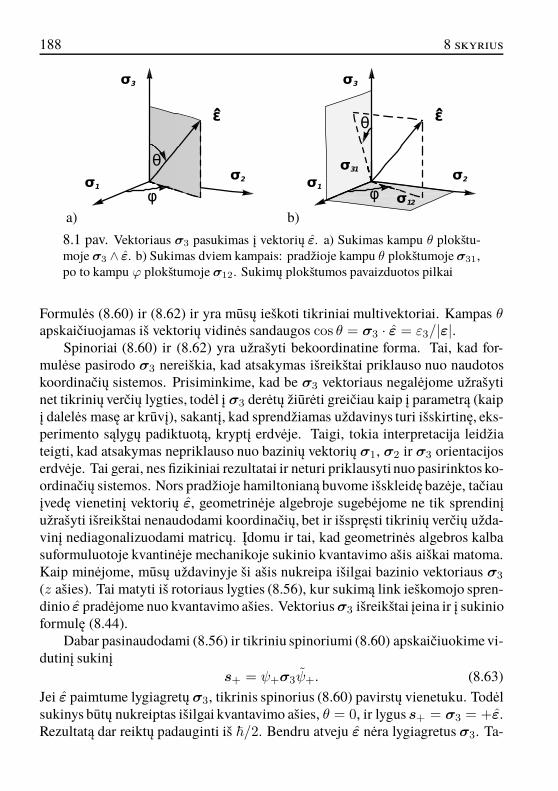
188 8 skyrius
a) b)
8.1 pav. Vektoriaus σ3 pasukimas į vektorių ε. a) Sukimas kampu θ plokštu-moje σ3 ∧ ε. b) Sukimas dviem kampais: pradžioje kampu θ plokštumojeσ31,po to kampu ϕ plokštumoje σ12. Sukimų plokštumos pavaizduotos pilkai
Formulės (8.60) ir (8.62) ir yra mūsų ieškoti tikriniai multivektoriai. Kampas θapskaičiuojamas iš vektorių vidinės sandaugos cos θ = σ3 · ε = ε3/|ε|.
Spinoriai (8.60) ir (8.62) yra užrašyti bekoordinatine forma. Tai, kad for-mulėse pasirodo σ3 nereiškia, kad atsakymas išreikštai priklauso nuo naudotoskoordinačių sistemos. Prisiminkime, kad be σ3 vektoriaus negalėjome užrašytinet tikrinių verčių lygties, todėl į σ3 derėtų žiūrėti greičiau kaip į parametrą (kaipį dalelės masę ar krūvį), sakantį, kad sprendžiamas uždavinys turi išskirtinę, eks-perimento sąlygų padiktuotą, kryptį erdvėje. Taigi, tokia interpretacija leidžiateigti, kad atsakymas nepriklauso nuo bazinių vektorių σ1, σ2 ir σ3 orientacijoserdvėje. Tai gerai, nes fizikiniai rezultatai ir neturi priklausyti nuo pasirinktos ko-ordinačių sistemos. Nors pradžioje hamiltonianą buvome išskleidę bazėje, tačiauįvedę vienetinį vektorių ε, geometrinėje algebroje sugebėjome ne tik sprendinįužrašyti išreikštai nenaudodami koordinačių, bet ir išspręsti tikrinių verčių užda-vinį nediagonalizuodami matricų. Įdomu ir tai, kad geometrinės algebros kalbasuformuluotoje kvantinėje mechanikoje sukinio kvantavimo ašis aiškai matoma.Kaip minėjome, mūsų uždavinyje ši ašis nukreipa išilgai bazinio vektoriaus σ3
(z ašies). Tai matyti iš rotoriaus lygties (8.56), kur sukimą link ieškomojo spren-dinio ε pradėjome nuo kvantavimo ašies. Vektoriusσ3 išreikštai įeina ir į sukinioformulę (8.44).
Dabar pasinaudodami (8.56) ir tikriniu spinoriumi (8.60) apskaičiuokime vi-dutinį sukinį
s+ = ψ+σ3ψ+. (8.63)
Jei ε paimtume lygiagretų σ3, tikrinis spinorius (8.60) pavirstų vienetuku. Todėlsukinys būtų nukreiptas išilgai kvantavimo ašies, θ = 0, ir lygus s+ = σ3 = +ε.Rezultatą dar reiktų padauginti iš ~/2. Bendru atveju ε nėra lygiagretus σ3. Ta-

Schrödingerio-Paulio kvantinė mechanika 189
čiau, prisiminę rotoriaus lygtį (8.59), iš karto galim užrašyti atsakymą
s± = ± ε
|ε| ≡ ±ε . (8.64)
Matome, kad |s| = 1. Tai reiškia, kad sukinio vektoriaus galas guli ant vienetinėssferos. Ši sfera vadinama Blocho (Felix Bloch 1905–1983 m.) sfera. Taigi, ha-miltoninėje funkcijoje (8.47) pasirodantis vektorius ε gali būti suprantamas kaipvidutinis sukinys s. Pastebėsime, kad kvantavimo ašies krypties pasirinkimą le-mia pradinės uždavinio arba eksperimento sąlygos, o ne vektoriaus ε uždavimas.Jei nagrinėjame dviejų lygmenų sistemą, kurią sudaro du sąveikaujantys kvanti-niai šuliniai, vektorius s vadinamas ne sukinio, o poliarizacijos vektoriumi.
Tačiau vieną vektorių į kitą galime pasukti ne vienu, o daugeliu būdų. Pavyz-džiui, pirmiau galėjom σ3 pasukti kampu θ plokštumojeσ31 (tai atlieka rotoriusRθ = exp(−σ31θ/2), o po to kampu ϕ plokštumojeσ12, kaip parodyta 8.1b pa-veiksle. Pastarojo sukimo rotorius yra Rϕ = exp(−σ12ϕ/2). Tada kombinuotąsukimą nusako abiejų rotorių sandauga Rϕθ = RϕRθ . Išreikštai apskaičiavę Rϕθrotorių pamatytume, kad jis skiriasi nuo anksčiau mūsų surasto (8.60) rotoriauspavidalo,Rϕθ 6= ψ+. Tačiau lengva įsitikinti, kad abu rotoriai-spinoriai teisingaipasuka σ3 vektorių į ε, t. y. Rϕθσ3Rϕθ = ψ+σ3ψ+ = ε.
Kur slypi tokio nevienareikšmiškumopriežastis? Ją lengvai suprasime paste-bėję, kad sukant rotoriumi Rϕ′ vektorių σ3 plokštumojeσ12 bet kokiu kampu ϕ′
šis nepasikeičia, Rϕ′σ3Rϕ′ = σ3. Taip ir turi būti, nes vektorius yra statmenassukimo plokštumai. Tai reiškia, kad bet kokį rotorių padauginus iš dešinės iš Rϕ′
rezultatas nuo to nepasikeis. Paties rotoriaus pavidalas, žinoma, pasikeičia. Pa-vyzdžiui, nesunku patikrinti, kad rotoriai ψ+ ir Rϕθ = RϕRθ skiriasi būtent pertokį posūkį. Iš tiesų,
RϕθR−1ϕ = RϕRθRϕ = Rϕe
−σ31θ/2Rϕ = Rϕ
(cos
θ
2− σ31 sin
θ
2
)Rϕ
= cosθ
2− (Rϕσ31Rϕ) sin
θ
2= exp
(−(Rϕσ31Rϕ)
θ2
)
= exp(−(cosϕσ31 + sinϕσ23)
θ2
)= ψ+,
(8.65)
kur pasinaudojome formulėmis (8.61) ir (8.60). Narys Rϕσ31Rϕ eksponentėjepasuka σ31 ten, kur reikia. Pastebėsime, kad nors ekvivalentiškų rotorių, ku-rie pasuka σ3 vektorių į ε, yra be galo daug, mūsų rastieji rotoriai ψ± yra pa-prasčiausi ir todėl neturi perteklinės informacijos. Kitaip tariant, juose nepasi-rodo nereikalingų pasukimų, kurie dingsta skaičiavimo pabaigoje. Matome, kadpanašiai buvo ir su vektoriais bei jų projekcijomis. Perteklinė informacija lėti-

190 8 skyrius
na apskaičiavimus. Tai paaiškina, kodėl geometrinė algebra vis plačiau taikomageometriniame modeliavime, tame tarpe ir animacijoje.
8.2 pavyzdys. Patikrinkime, kad (8.60) spinorius tenkina tikrinių verčių lygtį (8.53).Tuo tikslu lygtį perrašykime patogesniu pavidalu,
ε+ = ψ+H(ψ+) . (8.66)
Įstatę hamiltoniano funkciją (8.52) turime
ε+ = ψ+(ε0ψ+ + εψ+σ3) = ε0 + (ψ+εψ+)σ3. (8.67)
Narį paskutiniuose skliaustuose rasime iš (8.59) formulės, jei kairę ir dešinę jos pusespadauginsime atitinkamai iš ψ+ ir ψ+. Rezultatas yra ψ+εψ+ = σ3|ε|. Įstatę jį į (8.67),gauname anksčiau išvestą dispersijos formulę
ε+ = ε0 + σ3|ε|σ3 = ε0 + |ε|. (8.68)
Patikrinimui galėjome naudoti ir bendrą formulę (8.60), tačiau tada apskaičiavimai būtųbuvę ilgesni.
8.5.2. Elektrono sukinys pastoviame magnetiniame lauke. Tipinis dvie-jų lygmenų pavyzdys yra sukinys (angl. spin). Sukinį turi elektronas ir daugeliselementariųjų dalelių. Paprastai kalbant, dalelės su savimi nešiojasi mažą mag-netuką. Tik ne paprastą, o kvantinį. Magnetuko šiaurinis ir pietinis poliai galibūti tik dviejose padėtyse — kai šiaurinis polius yra viršuje ir pietinis apačiojearba atvirkščiai, kai šiaurinis apačioje ir pietinis viršuje. Čia žodžiai „viršus“ ir„apačia“ reiškia orientaciją išskirtinės ašies (mes visur laikysime, kad ji lygiagre-ti σ3), kuri vadinama sukinio kvantavimo ašimi, atžvilgiu. Ašį galima užduotieksperimente, pavyzdžiui, elektronus greitinant greitintuvu. Tokiu atveju sako-ma, kad išlėkę iš greitintuvo elektronai yra poliarizuoti. Jei elektrono (tiksliau,elektronų pluoštelio) kvantavimo ašies kryptis nežinoma, ją galima nustatyti eks-perimentiškai, pavyzdžiui, su Sterno-Gerlacho įrenginiu, kuriame nevienalyčiomagneto poliai erdvėje užduoda tam tikrą kryptį. Jei pluoštelyje visų elektronųsukiniai nukreipti į viršų, t. y. jų kvantavimo ašis sutampa su magneto užduoda-ma ašimi, pluoštelis atsilenks į vieną pusę, jei yra priešinga šiai krypčiai — į kitą.Jei sukiniai orientuoti statmenai magneto ašiai, tada elektronai bus atlenkiami irį vieną, ir į kitą pusę, todėl pluoštelis suskils į dvi dalis.
Elektrono sukinio kvantinis skaičius s, kuris, kaip minėta, gali įgyti dvi prie-šingas vertes, istoriškai laikomas lygiu ±1/2. Dalelės sukinys yra betarpiškaisusijęs su jos magnetiniu momentu µ,
µ = γs. (8.69)
Proporcingumo koeficientas γ vadinama giromagnetine pastoviąja. Vietoje josdažniau naudojamas kitas dydis — giromagnetinis santykis g. Abi konstantas

Schrödingerio-Paulio kvantinė mechanika 191
sieja sąryšisγ = g
q
2m, (8.70)
kurm yra dalelės masė, o q žymi elementarųjį (elektrono) krūvį. Vidinę struktū-rą turinčios dalelės gali būti elektriškai neutralios ir, nežiūrint to, turėti nenulinįmagnetinį momentą. Toks, pavyzdžiui, yra neutronas. Todėl elementarusis krū-vis (8.70) formulėje tėra istorinė liekana. Svarbi tik γ vertė.
Giromagnetinis santykis įsivaizduojamaskaip dalelės judesiokiekiomomen-to, t. y. mechaninio momento, ir magnetinio momento, kuris atsiranda elektrinįkrūvį turinčiai dalelei sukantis žiedu, santykis. Istoriškai toks įsivaizdavimasatsirado nagrinėjant atomo branduolį ir aplink jį besisukantį elektroną. Taigi, gi-romagnetinis santykis apibūdina magnetuko, kurį nešiojasi dalelė, dydį. Kuo ga-lingesnį magnetuką nešiojasi dalelė, tuo šis santykis didesnis. Eksperimentiškaiišmatuota, kad elektronui g ≈ 2, protonui g = 5,587, o neutronui g = −3,826.Giromagnetinis santykio ženklas lemia ir energijos pokyčio ženklą, kurį dalelėįgytų atsiradus išoriniam magnetiniam laukui. Tai sąlygoja ir priešingas atrankostaisykles apskritimiškai poliarizuotai šviesai, kai sukinys žadinamas iš energe-tiškai žemesnio lygmens į aukštesnį. Toliau mes nagrinėsim elektrono sukinį,kuriam γ = q/m. Ši vertė yra dvigubai didesnė už judančio apskritimu elektro-no giromagnetinį santykį.
Energijos lygmenų suskilimas dėl sukinio yra tiesiogiai proporcingas magne-tinio lauko dydžiui. Todėl dalelės sąveiką su magnetiniu lauku kvantinėje mecha-nikoje aprašo paprasčiausias galimas skaliaras — dalelės magnetinio momento irmagnetinės indukcijos vektoriaus B = B1, B2, B3 skaliarinė sandauga. Už-rašytas per Paulio matricas jis atrodo taip:
HB = µ ·B = −1
2γσ ·B = −1
2γ~(B1σ1 + B2σ2 +B3σ3)
= −1
2γ~
ñ−B3 B1 − iB2
B1 + iB2 B3
ô,
(8.71)
kur σ = (σ1, σ2, σ3) yra iš Paulio matricų sudarytas vektorius. Kaip matyti,gauta matrica turi tokią pat sandarą, kaip dviejų lygmenų hamiltonianas (8.46).Todėl visos formulės ir išvados, kurios buvo gautos dviejų lygmenų modeliui, tiksir sukiniui. Formulėje, kaip visada, dalelės sukiniokvantavimo ašis yra lygiagretiz ašiai. Tai matyti iš to, kad nukreipus magnetinį lauką z kryptimi (B1 = B2 = 0ir B3 = |B|), hamiltonianas tampa diagonaliu, kurio pagrindinėje diagonalėjestovi energijų vertės ±1
2γ~, kurios atitinka viršutinį (sukinys nukreiptas į viršų)ir apatinį (sukinys nukreiptas žemyn) energijos lygmenis. Jei magnetinis laukasnukreiptas bet kuria kita kryptimi, dalelės būsenos su skirtingais sukiniais susi-

192 8 skyrius
maišo. Tai reiškia, kad būsenos nėra stacionarios, o vidutinis sukinys pradedaprecesuoti. Precesijos metu „magnetuko“ ašis sukasi aplink kitą ašį, kuri mūsųatveju lygiagreti magnetiniam laukui.
Precesijos pobūdį aprašo Schrödingerio-Paulio lygtis, kurios pavidalągeomet-rinėje algebroje aptarsime jau kitame skyrelyje. Kai nagrinėjame tik elektronosukinį nuolatiniame magnetiniame lauke, precesijai aprašyti pakanka Paulio pa-siūlytos paprastesnės lygties
i~∂|ψ〉∂t
= −1
2γ~Bkσk, (8.72)
kurioje sumuojama pagal indeksą k = 1, 2, 3. Padauginę abi lygties puses iš me-namojo vieneto ir pasinaudoję 8.1 lentele, užrašome jos atitikmenį geometrinėjealgebroje:
∂ψ
∂t=
1
2γIBψ . (8.73)
Kaip ir buvo galima tikėtis, geometrinėje algebroje magnetinio lauko indukcijapasirodo kaip bivektorius,
B ≡ IB = B1Iσ1 + B2Iσ2 +B3Iσ3 , (8.74)
dualus tradiciniam magnetinės indukcijos vektoriui B. Kadangi (8.73) lygtyjeišvestinė yra parametro (laiko) funkcija, ji išsprendžiama paprastai,
ψ(t) = eγBt/2ψ0 , (8.75)
čia ψ0 ≡ ψ(0). Tarkime, kad pradiniu laiko momentu t = 0 elektronas yra būse-noje |↑〉 (geometrinėje algebroje ją atitinka spinorius ψ0 = 1). Kaip išplaukia iš(8.44) formulės, jo sukinys tada nukreiptas išilgai σ3. Išskleidę spinorių (8.75)trigonometrinėmis funkcijomis turime
ψ(t) = cosωt
2+
B|B| sin
ωt
2, (8.76)
kur ω = γ|B| yra precesijos dažnis. Įstatę šią išraišką į (8.44) randame, kadvidutinis sukinys laikui bėgant keičiasi dėsniu
s(t) = σ3 cos2 ωt
2− Bσ3B
|B|2 sin2ωt
2+
Bσ3 − σ3B2|B| sinωt . (8.77)
Formulė užrašyta bekoordinatiniu pavidalu. Ją dar reiktų padauginti iš ~/2. At-sakyme pasirodęs bazinis vektoriusσ3 reiškia pradinį elektrono sukinį, s0 = σ3,kurį taip pat galima interpretuoti ir kaip elektrono kvantavimo ašį. Dėl šios prie-
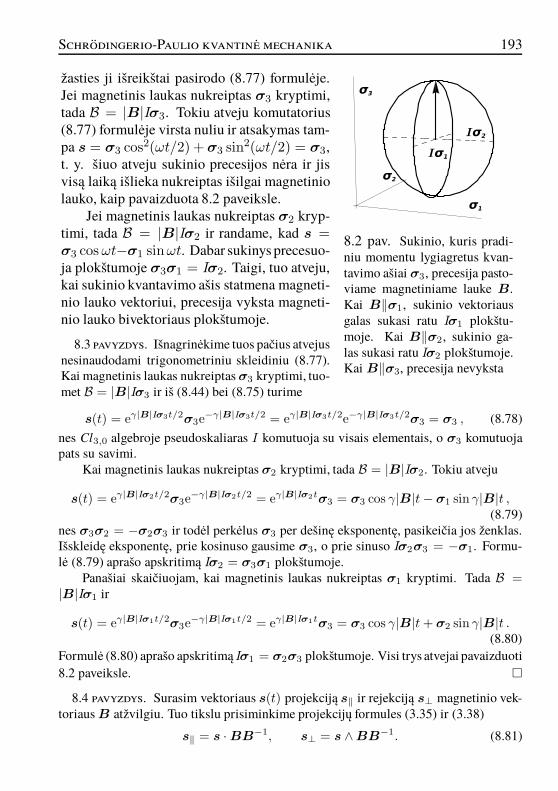
Schrödingerio-Paulio kvantinė mechanika 193
8.2 pav. Sukinio, kuris pradi-niu momentu lygiagretus kvan-tavimo ašiai σ3, precesija pasto-viame magnetiniame lauke B.Kai B‖σ1, sukinio vektoriausgalas sukasi ratu Iσ1 plokštu-moje. Kai B‖σ2, sukinio ga-las sukasi ratu Iσ2 plokštumoje.Kai B‖σ3, precesija nevyksta
žasties ji išreikštai pasirodo (8.77) formulėje.Jei magnetinis laukas nukreiptas σ3 kryptimi,tada B = |B|Iσ3. Tokiu atveju komutatorius(8.77) formulėje virsta nuliu ir atsakymas tam-pa s = σ3 cos
2(ωt/2) +σ3 sin2(ωt/2) = σ3,
t. y. šiuo atveju sukinio precesijos nėra ir jisvisą laiką išlieka nukreiptas išilgai magnetiniolauko, kaip pavaizduota 8.2 paveiksle.
Jei magnetinis laukas nukreiptas σ2 kryp-timi, tada B = |B|Iσ2 ir randame, kad s =σ3 cosωt−σ1 sinωt. Dabar sukinysprecesuo-ja plokštumoje σ3σ1 = Iσ2. Taigi, tuo atveju,kai sukinio kvantavimo ašis statmena magneti-nio lauko vektoriui, precesija vyksta magneti-nio lauko bivektoriaus plokštumoje.
8.3 pavyzdys. Išnagrinėkime tuos pačius atvejusnesinaudodami trigonometriniu skleidiniu (8.77).Kai magnetinis laukas nukreiptasσ3 kryptimi, tuo-met B = |B|Iσ3 ir iš (8.44) bei (8.75) turime
s(t) = eγ|B|Iσ3t/2σ3e−γ|B|Iσ3t/2 = eγ|B|Iσ3t/2e−γ|B|Iσ3t/2σ3 = σ3 , (8.78)
nes Cl3,0 algebroje pseudoskaliaras I komutuoja su visais elementais, o σ3 komutuojapats su savimi.
Kai magnetinis laukas nukreiptas σ2 kryptimi, tada B = |B|Iσ2. Tokiu atveju
s(t) = eγ|B|Iσ2t/2σ3e−γ|B|Iσ2t/2 = eγ|B|Iσ2tσ3 = σ3 cos γ|B|t− σ1 sin γ|B|t ,
(8.79)nes σ3σ2 = −σ2σ3 ir todėl perkėlus σ3 per dešinę eksponentę, pasikeičia jos ženklas.Išskleidę eksponentę, prie kosinuso gausime σ3, o prie sinuso Iσ2σ3 = −σ1. Formu-lė (8.79) aprašo apskritimą Iσ2 = σ3σ1 plokštumoje.
Panašiai skaičiuojam, kai magnetinis laukas nukreiptas σ1 kryptimi. Tada B =|B|Iσ1 ir
s(t) = eγ|B|Iσ1t/2σ3e−γ|B|Iσ1t/2 = eγ|B|Iσ1tσ3 = σ3 cos γ|B|t+ σ2 sin γ|B|t .
(8.80)Formulė (8.80) aprašo apskritimą Iσ1 = σ2σ3 plokštumoje. Visi trys atvejai pavaizduoti8.2 paveiksle.
8.4 pavyzdys. Surasim vektoriaus s(t) projekciją s‖ ir rejekciją s⊥ magnetinio vek-toriaus B atžvilgiu. Tuo tikslu prisiminkime projekcijų formules (3.35) ir (3.38)
s‖ = s ·BB−1, s⊥ = s ∧BB−1. (8.81)

194 8 skyrius
Pirmiausia apskaičiuokime vidinę sandaugą
s·B =sB +Bs
2= eγIBt/2
(σ3B +Bσ3
2
)e−γIBt/2 = eγIBt/2B3e
−γIBt/2 = B3,
(8.82)kur pasinaudojom tuo, kad B komutuoja su eksponentėmis ir skaliaruB3. Taigi, projek-cija į magnetinio lauko vektorių yra
s‖ = B3B−1 =
B3B
|B|2 . (8.83)
Ji rodo, kad vykstant precesijai vektoriauss projekcija į magnetinį lauką nepriklauso nuolaiko. Rejekciją galima apskaičiuoti naudojant antrąją (8.81) formulę arba, paprasčiau,iš sąlygos s⊥ = s− s‖. To nedarysime, tik pastebėsime, kad vektoriaus s⊥ galas sukasiratu plokštumoje B ir visą laiką yra statmenas s‖.
8.5 pavyzdys. Vidutinis sukinys s dar vadinamas ir poliarizacija, kuri labai panaši įšviesos pluoštelio poliarizaciją. Todėl elektronų pluoštelio savybes apibūdina poliariza-cijos vektorius. Jei pluoštelis yra pilnai poliarizuotas, jis tenkina sąlygą s2 = 1. Paro-dysim, kad mūsų rastas s yra pilnai poliarizuotas. Paprasčiausia tai padaryti užrašius seksponentiniu pavidalu:
s2 =(eγBt/2σ3e
−γBt/2)(
eγBt/2σ3e−γBt/2
)= eγBt/2σ2
3e−γBt/2 = 1. (8.84)
Tai reiškia, kad visų s vektorių galai guli ant vienetinės Blocho sferos. Kitaip tariant,precesijos metu brėžiamas apskritimas taip pat guli ant sferos paviršiaus.
8.6. Schrödingerio-Paulio lygtis
Schrödingerio-Paulio lygtis aprašo, kaip elgiasi elektrono sukinys, kai relia-tyvistinės pataisos nėra svarbios. Ši lygtis plačiai taikoma fizikoje. ReliatyvistinėDiraco lygtis, iš kurios betarpiškai išplaukia sukinio egzistavimas, yra gerokai su-dėtingesnė. Bet ar Diraco lygtis yra vienintelė, kuri paaiškina sukinio egzistavi-mą? Šis klausimas iškilo Schrödingerio-Paulio lygtį perrašius Cliffordo algebra.Reikia pabrėžti, kad pati Cliffordo algebra į kvantinę mechaniką neįveda nau-jų fizikinių reiškinių ar fizikinių objektų. Tai tiesiog kitas matematinis aparatas,dažnai palengvinantis ir supaprastinantis skaičiavimus. Ypač supaprastėja skai-čiavimai, liečiantys sukimus. Dar vienas patrauklus šio aparato bruožas, kaipjau turėjome progą įsitikinti, yra geometrinis vaizdumas. Tradiciniame kvanti-nės mechanikos formalizme menamasis vienetas i =
√−1 turi kažkokią mistinę
prasmę. Tiesą sakant, jau pati Hilberto erdvė, nuo kurios pradedamas formu-luoti kvantinės mechanikos matematinis aparatas, yra kompleksinė. Kita vertus,be kompleksinio vieneto kvantinė mechanika sunkiai įsivaizduojama. Pavyz-džiui, elektrono tuneliavimo trukmė apskaičiuojama, tik energijos išraišką pra-

Schrödingerio-Paulio kvantinė mechanika 195
tęsus kompleksinėje plokštumoje į menamas energijas. Ilgainiui prie menamųjųskaičių įprantame ir interpretacijos klausimais domėtis nustojame.
Tačiau ar tikrai kvantinei mechanikai kompleksiniai skaičiai yra būtini? At-siradus geometrinei algebrai buvo suprasta, kad menamojo vieneto mistiškumąfizikoje gana paprasta paaiškinti. Kompleksinis vienetas yra tiesiog bivektorius,t. y. pasižymi savybėmis, reikalingomis objektų sukimui fizikinėje erdvėje ap-rašyti. Kaip visi žinome, Euklido erdvėje du postūmius visada galima sukeistivietomis, t. y. transliacijos visada komutuoja. Tačiau fizikoje dažnai reikia ap-rašyti ne tik postūmius, bet ir sukimus. Šie gi tarpusavyje beveik visada neko-mutuoja. Kitaip tariant, sukeitus vietomis du sukimus posūkio rezultatai skirsis.Paplitusi Dekarto koordinačių sistema nėra pritaikyta sukimams aprašyti, nes josbaziniai vektoriai komutuoja. Todėl tenka sugalvoti nekomutuojančius objektus,pavyzdžiui, matricas, ir sukimus aprašyti jomis. Kitaip yra su geometrinės algeb-ros baziniais vektoriais. Šie tarpusavyje nekomutuoja pagal apibrėžimą. Todėlgeometrinėje algebroje tiek transliacijų, tiek ir posūkių svarbiausios savybės yrapaslėptos pačioje koordinačių sistemoje, arba pasakytume, geometrinės algeb-ros erdvėje. Ir iš tiesų, norint pasakyti, kad dirbame trimatėje Euklido erdvėje,nepakanka popieriaus lape brūkštelėti tris linijas ir paskelbti, kad jos nusako or-togonalias koordinates. Dar reikia nusakyti, kaip šios ašys susijusios tarpusavyje,o taip pat reikia žinoti, kokie yra bazinių vektorių kvadratų ženklai, e2i > 0 are2i < 0, kitaip tariant, nusakyti erdvės metriką. Dėl šios priežasties fizikų gre-tos linksta prie geometrinės algebros. Ir ne vien dėl to, kad būtų galima vienpaprasčiau ir nuosekliau performuluoti žinomą fiziką. Daug kas tikisi, kad toksperformulavimas padės surasti naujų daugiamačių fizikinių erdvių, kuriose galė-tų atsiskleisti nauji fizikos dėsniai. Pastaroji kryptis yra ypač aktuali šiuolaikineireliatyvistinei kosmologijai.
Tačiau grižkime prie paprasčiausios trimatės erdvės modelio, t.y. prie Cl3,0algebros ir kvantinės mechanikos. Lygindami tradicines formules su jų pavidalugeometrinėje algebroje, pavyzdžiui, 8.1 lentelėje, galime pastebėti, kad vietojmenamojo vieneto i =
√−1 dažnai stovi bivektorius Iσ3. Tai yra požymis, kad
turim reikalą su sukimu. Pavyzdžiui, magnetinį lauką nukreipus z ašies kryptimiB‖z, elektrono precesijos lygtį (8.73) galima perrašyti pavidalu (g = 2),
∂ψ
∂tIσ3 = γBψσ3 . (8.85)
Lygtį galima apibendrinti ir atvejui, kai magnetinis laukas priklauso nuo koordi-natės. Tam pasinaudosime pakeitimo taisykle
p|ψ〉 = −i~∇ψ ⇔ −~(∇ψ)Iσ3, (8.86)

196 8 skyrius
kuri apibrėžia impulso operatorių. Dešinėje pusėje užrašytas nabla ∇ jau su-prantamas geometrinės algebros prasme, kaip (6.3) formulėje,
∇ = σ1∂
∂x+ σ2
∂
∂y+ σ3
∂
∂z. (8.87)
Dabar jau galime užrašyti elektrono judėjimo lygtį nevienalyčiame magnetiniamelauke [34],
∂ψ
∂tIσ3 = − ~2
2m∇
2ψ + γBψσ3 . (8.88)
Ši lygtis aprašo Sterno ir Gerlacho eksperimentą geometrinėje algebroje.Jei vietoje magnetinio lauko įvesim vektorinį potencialąA, o vietoje elektri-
nio lauko skaliarinį potencialąϕ, galėsim užrašyti dar bendresnę lygtį elektronuisu sukiniu CGS vienetų sistemoje,
~∂ψ
∂tIσ3 =
1
2m
ÄP − e
cAä2ψ + qϕψ ,
SCHRÖDINGERIO-PAULIO
LYGTIS Cl3,0 ALGEBROJE
(8.89)
kurioje impulso operatorius į spinorių ψ veikia tokiu būdu:
Pψ = −~∇ψIσ3 . (8.90)
Išskleista (8.89) lygtis įgyja pavidalą [35, 36]
∂ψ
∂tIσ3 =
1
2m
(−~
2∇
2+e2
c2A2)ψ+
e~
mcA ·∇ψIσ3+
e~
2mc(∇A)ψIσ3+qϕψ,
(8.91)kur
∇A = ∇ ·A+∇ ∧A = ∇ ·A+ IB (8.92)
ir IB = I∇×A = I rotA. Šių geometrinės algebros terminais perrašytų sudė-tingų lygčių mes nenagrinėsime, o išspręsime paprastesnį, su sukinio elektronika,dabar vadinama spintronika, susijusį uždavinį.
8.6.1. Nuo laiko priklausančios būsenos. Paimkime du magnetinius lau-kus: vieną pastovų, B0 = B0σ3, nukreiptą išilgai z ašies, ir kitą, B1(t), besisu-kantį plokštumoje x–y kampiniu greičiu ω,
B = B0 +B1(t) = B0σ3 +B1
Äσ1 cosωt+ σ2 sinωt
ä. (8.93)
Pasinaudoję rotoriaus S išraiška
S = e−Iσ3ωt/2 (8.94)
užrašysim magnetinį lauką eksponentės pavidalu. Kadangi
Sσ1S = σ1 cosωt+ σ2 sinωt, Sσ3S = σ3, (8.95)

Schrödingerio-Paulio kvantinė mechanika 197
turimeB = S(B1σ1 +B0σ3)S . (8.96)
Todėl sukinio lygtį (8.73) kintamame lauke pakeičia lygtis
dψ
dt=
1
2γS(B1Iσ1 +B0Iσ3)Sψ . (8.97)
Padauginę ją iš kairės iš S ir pastebėję, kad d(Sψ)/dt = (Iσ3ω/2)Sψ + Sψ,perrašome lygtį pavidalu
d
dt(Sψ) =
1
2(ω1Iσ1 + ω0Iσ3 + ωIσ3) (Sψ), (8.98)
kur įvedėm dažnius ω1 = γB1 ir ω0 = γB0. Kadangi laikas — parametras, šioslygties sprendinys Sψ yra eksponentė, iš kurios išreiškę ψ gauname
ψ(t) = e−Iσ3ωt/2eIσ3(ω0+ω)t/2+Iσ1ω1t/2ψ0
= e−Iσ3ωt/2Åcos
Ωt
2+ IB sin
Ωt
2
ãψ0,
(8.99)
kur įvedėme pažymėjimus
B =ω1σ1 + (ω0 + ω)σ3
Ω, Ω =
»(ω0 + ω)2 + ω2
1 . (8.100)
Atsakyme pasirodę trys dažniai aprašo įdomią fiziką. Tarkime, kad pradiniu lai-ko momentu elektronas buvo būsenoje |↑〉 (geometrinėje algebroje jį atitinka spi-norius ψ0 = 1) ir norime sužinoti, kokia yra tikimybė laiko momentu t aptiktielektroną būsenoje su priešingu sukiniu |↓〉 ⇒ −Iσ2. Tam reikia apskaičiuotiamplitudės kvadratą
P↓ =∣∣∣〈↓|ψ(t)〉
∣∣∣2. (8.101)
Įstatę (8.99) į (8.40) formulę randame
−〈Iσ2〉 =ω1Ω
sinωt
2sin
Ωt
2,
〈Iσ1〉 = −ω1Ω
cosωt
2sin
Ωt
2.
(8.102)
Iš gautų išraiškų išplaukia, kad
〈↓|ψ(t)〉 ⇔ −〈Iσ2〉+ 〈Iσ1〉Iσ3 = −ω1Ωe−Iσ3ωt/2 sin
Ωt
2Iσ3 . (8.103)
Taigi, bėgant laikui aptikimo tikimybė keičiasi dėsniu
P↓ =
Åω1Ω
ã2sin2
Ωt
2. (8.104)

198 8 skyrius
8.3 pav. Elektrono sukiniotrajektorija ant Blocho sferos,kai žadinantis magnetinio lau-ko dažnis ω sutampa su ciklot-roniniu dažniu, ω = −ω0 =1,5. ω1 = 0,1 ir t = 0− 60
Formulė sako, kad tikimybė aptikti elektroną suapsivertusiu sukiniu laikui bėgant osciliuoja. To-kio tipo osciliacijos vadinamos Rabio osciliacijo-mis [30]. Jų amplitudę (ω1/Ω)
2 ir dažnį Ω =»(ω0 + ω)2 + ω2
1 lemia magnetinių laukų stip-riai: nuolatinis magnetinis laukas, ω0 = γB0, irbesisukantismagnetinis laukas,ω1 = γB1, bei su-kimosi dažnis ω. Rezonanso metu, ω = −ω0, kaibesisukančio magnetinio lauko dažnis susilyginasu ciklotrininiu elektrono dažniu ω0 = q|B0|/m,šuolio amplitudė (ω1/Ω)2 tampa lygi vienetui.
Įstačius ψ(t) į (8.44) formulę, nesunku surastiir kaip laikui bėgant keičiasi elektrono poliariza-cijos s(t) = s1(t)σ1+ s2(t)σ2+ s3(t)σ3 sandai,
s1(t) =ω1Ω2
(2(ω + ω0) cosωt sin
2 Ωt
2−Ω sinωt sinΩt
),
s2(t) =ω1Ω2
(2(ω + ω0) sinωt sin
2 Ωt
2−Ω cosωt sinΩt
),
s3(t) =1
Ω2
((ω + ω0)
2 −Ä(ω + ω0)
2 −Ω2äcos Ωt
).
(8.105)
Lengva patikrinti, kad s21(t)+s22(t)+s
23(t) = 1, t. y. sukinio s(t) trajektorija visą
laiką guli ant sferos. Kai kintamo magnetinio lauko sukimosi dažnis sutampa suciklotroniniu dažniu, ω = −ω0, trajektorijos formulė labai supaprastėja:
s(t) = sinω1t(sinω0tσ1 + cosω0tσ2)
+ cosω1tσ3 .(8.106)
Šis atvejis pavaizduotas 8.3 paveiksle, iš kurio matyti, kad poliarizacijos vekto-riaus (sukinio) galas periodiškai juda susivyniojančia ir išsivyniojančia spiralenuo šiaurinio link pietinio poliaus, ir atgal. Mažinant amplitudę B1, spiralėsžingsnis mažėja ir B1 → 0 riboje pereina į precesijos apskritimą nuolatiniamemagnetiniame lauke (kad taip atsitiktų, dar reikia pakeisti ir pradines sąlygas).
Baigdami atkreipsime dėmesį į bendrą sukinio-vektoriaus (8.44) ir spinorių(8.75) bei (8.99) lygties sandarą. Šių spinorių eksponentėje, panašiai kaip ir ro-toriuje R, stovi bivektorius, kuris elektrono sukinį suka lygiai taip pat, kaip sukospindulį-vektorių klasikinėje mechanikoje (žr. 5 skyrių). Todėl spinoriui galimasuteikti ir naują fizikinę prasmę. Būtent, spinorius yra rotorius, pasukantis suki-nius iš elektrono kvantavimo ašies σ3 į vektorių s = Rσ3R. Tuo pačiu diferen-cialinę Schrödingerio lygtį (8.97) galima interpretuoti ir kaip rotoriaus judėjimolygtį. Taigi, peršasi išvada, kad Schrödingerio lygtis aprašo ne banginės funkci-

Schrödingerio-Paulio kvantinė mechanika 199
jos, o rotoriaus R ≡ ψ evoliuciją. Maža to, geometrinės algebros interpretacijojekvantavimo ašis yra vidinė elektrono savybė, kurią nusako bazinis vektorius σ3
ir kurio kryptį erdvėje galime laisvai pasirinkti. σ3 kryptį galima pakeisti tik lei-džiant elektronui kurį laiką sąveikauti su kitomis dalelėmis. Matematiškai tokiasąveika teisingai aprašoma tik atsižvelgus į sukinio ir sukinio, sukinio ir orbitosbei pilnojo judesio kiekio momento (orbita + sukinys) tvermės dėsnį. Sąveikapakeičia ne tik judesio kiekio momento dydį, bet ir jo kryptį, t. y. bivektoriausplokštumos padėtį erdvėje. Gi standartinėje kvantinėje mechanikoje kvantavimoašis nėra aiškiai nurodyta. Ji yra paslėpta pačioje matematinėje struktūroje ir pra-dedančiam fizikui sukuria klaidinantį įspūdį, tarsi kvantavimo ašis būtų ne vidinėelektrono, o pačios erdvės, kurioje tas elektronas yra, savybė.
8.7. Sukinys kvantiniame šulinyje
Kvantiniu šuliniu vadinamas elektrostatinis stačiakampės formos potencia-las, kuriame elektronas gali laisvai judėti išilgai šulinio tik dviem kryptimis. Tre-čiąja kryptimi dvi potencinės sienelės elektroną laiko suspaudusios erdvėje, todėlelektrono energija šia kryptimi tampa kvantuota. Likusiomis dviem kryptimiselektronas gali judėti laisvai. Sakoma, kad tokiu atveju turime erdvinį kvanta-vimą. Dėl tokio kvantavimo laisvojo elektrono parabolinis spektras suskyla įenergijų minijuostas, kurių skaičių lemia šulinio gylis. Apie kvantinius šuliniuspuslaidininkiuose ir dvimačius elektronus plačiau rašoma knygose [30, 37]. Mespanagrinėsim elektrono sukinio savybes vienoje, pačioje žemiausioje (pagrindi-nėje) minijuostoje, kai elektrono sukinį ima įtakoti orbitinis elektrono judėjimas(sukinio ir orbitos sąveika). Manysime, kad kvantinis šulinys yra pakankamaigilus. Tai reiškia, kad elektrono energija visada žymiai mažesnė už šulinio gylį.Tokiu atveju hamiltonianas, kuris aprašo dvimatį, suspaustą tarp dviejų plokštu-mų elektroną, įgyja pavidalą
H =µ
2(k21 + k22) + αR(k2σ1 − k1σ2) , (8.107)
kurµ = ~2/m∗ žymi atvirkštinęefektyvinę elektrono masę, k1 irk2 yra 2D elekt-rono bangos vektoriaus k = k1σ1 + k2σ2 sandai, o αR yra sukinio ir orbitossąveikos pastovioji, dar vadinama Rashbos vardu. Ašis σ3 nukreipta statmenaišulinio potencinėms sienelėms, o vektorius k yra joms lygiagretus.
Žiūrėdami į 8.1 lentelę, užrašome hamiltoninę funkciją (8.107) geometrinėjealgebroje,
H(ψ) =µk2
2ψ + αR(k2σ1 − k1σ2)ψσ3 , (8.108)
kur k2 = k21 +k22 . Palyginę (8.108) ir (8.52) išraiškas matome, kad ε0 = µk2/2,
ε1 = αRk2, ε2 = −αRk1, ε3 = 0. Tada, pasinaudoję (8.58) formule, iš karto

200 8 skyrius
+s
-s
¶+
¶-
k-,k+
k
¶
¶+= ¶-
k+k-
8.4 pav. Viršutinė paveikslo da-lis vaizduoja laidumo (mini)juostos,kuri dėl sukinio ir orbitos sąveikosyra suskilusi į dvi pojuostes, ener-gijos ε priklausomybę nuo elektro-no bangos skaičiaus k. Brūkšniuo-ti apskritimai apatinėje dalyje žymipastovios energijos kontūrus k1–k2plokštumoje, kurių energijos ε+ =ε− = const. Vertikalios strėlytės ro-do elektrono sukinį s bangos skai-čiams ±k+ ir ±k−, kur apatinis in-deksas žymi energiją ε+ arba ε−
gauname energijų spektrą, t. y. energijos pri-klausomybę nuo elektrono bangos skaičiaus,
ε± = µk2/2± αRk, k2 = k21 + k22 .(8.109)
Jį vaizduoja 8.4 paveikslo parabolės, ku-rias, kaip matysim, nusako priešingos suki-nio kryptys. Kai αR = 0, juostos susilie-ja. Tokiu atveju sakoma, kad (mini)juostaišsigimsta. Jei elektrono energiją paimsimelygią Fermio energijai εF (eksperimentiškaitai pasiekiama injektuojant elektroną iš fero-magnetiko) ir ε+ = ε− = εF, tada iš disper-sijos formulės (8.109) randame, kad atitin-kami elektrono bangos skaičiai lygūs
k± =(»
2µεF + α2R ± αR
)/µ . (8.110)
8.4 paveiksle parodyti bangos vektoriai k± irpastovios energijos apskritimai, kurie vaiz-duoja bangos vektoriaus ilgio priklausomy-bę nuo kampo, kai elektrono energija yra fik-suota. Taigi, užfiksavus elektrono energiją,jo bangos ilgis įgyja tik dvi reikšmes, λ± =2π/k±. Bangos vektorių skirtumas yra pro-porcingas Rashbos pastoviajai, k+ − k− =2αR/µ, kurią, kaip rodo eksprimentas, gali-ma keisti sukuriant elektrinį lauką statmenaikvantinio šulinio sienelėms. Todėl elektri-niu lauku galima valdyti sukinio ir orbitossąveikos stiprumą (Rashbos pastoviąją). Išformulės (8.64) randame, kad elektrono vi-dutinis sukinys yra
s± = ±(k2σ1 − k1σ2)/k = ±(sin θσ1 − cos θσ2) . (8.111)
Lengva įsitikinti, kad s · k = 0, t. y. sukiniai yra statmeni bangos skaičiams k+
ir k−, kaip pavaizduota 8.5 paveiksle.Jei pasinaudosim (8.60) ir (8.62) išraiškomis ir įstatysime parametrų εi ver-
tes, gausime, kad tikriniai rotoriai-spinoriai yra
ψ± = −(sin θ Iσ1 − cos θ Iσ2 ± Iσ3)/√2 . (8.112)

Schrödingerio-Paulio kvantinė mechanika 201
8.5 pav. Elektronų, turinčių tąpačią energiją, ε+ = ε−, sukiniais (strėlytės). Jie yra statmeni ati-tinkamiems bangos skaičiams k+
ir k− ir turi priešingas kryptis
Dabar apskaičiuosime elektrono šulinyjegreitį. Tradicinėje kvantinėje mechanikojegreičio operatorius apibrėžiamas kaip hamilto-niano ir koordinatės operatoriaus komutatoriusv = i
~[H, r]. Įstačius hamiltonianą (8.107) iš
jo išplaukia tokios matricos greičių sandams:
vx = (µkx − αRσy)/~ , (8.113a)
vy = (µky + αRσx)/~ . (8.113b)
Pasinaudoję 8.1 lentele gauname, kad Cl3,0 al-gebroje šios formulės atrodo taip:
vx(ψ) = (µkxψ − αRσ2ψσ3)/~, (8.114a)
vy(ψ) = (µkyψ + αRσ1ψσ3)/~ . (8.114b)Į šias formules įstačius (8.112) spinorius, nesunku apskaičiuoti vidutines
greičio sandų vertes,
〈vx〉 = 〈ψ±vx(ψ±)〉 = ~−1(kµ ∓ αR) cos θ , (8.115a)
〈vy〉 = 〈ψ±vy(ψ±)〉 = ~−1(kµ ∓ αR) sin θ . (8.115b)
Iš formulių galime matyti, kad greičio sandai nekomutuoja dėl sukinio ir orbitossąveikos. Todėl 〈vx〉2 + 〈vy〉2 6= 〈v2x〉 + 〈v2y〉. Taigi, esant sukinio ir orbitossąveikai vienu metu išmatuoti vienas kitam statmenų greičio sandų jau negalima.
Iki šiol nagrinėjom stacionarias energijos ir sukinio būsenas. Jei elektronasyra maišytoje būsenoje (tradicinėje kvantinėje mechanikoje ją atitinka tikriniųbūsenų superpozicija), tada jo sukinio projekcija laikui bėgant keičiasi. Priklau-somai nuo pradinių sąlygų vidutinis sukinys precesuoja apie vieną ar kitą ašį.Spinoriaus dinamiką šiuo atveju nusako lygtis
∂ψ
∂tIσ3 =
µk2
2ψ + αR(k2σ1 − k1σ2)ψσ3 , (8.116)
kuri gaunama į Schrödingerio-Paulio lygtį įstačius (8.108) hamiltoninę funkciją.Rasime šios multivektorinės diferencialinės lygties sprendinį. Pirmiausia paste-bėkime, kad paėmus bandomąjį sprendinį
ψ = ψSO(t)ψd, kur ψd = e−Iσ3µk2t/2 (8.117)
ir įstačius jį į (8.116) lygtį, susiprastina narys µk2ψ/2. Tada likusius narius pa-dauginę iš dešinės iš Iσ3, gauname evoliucijos lygtį
∂ψSO
∂t= −αR (k2Iσ1 − k1Iσ2)ψSO . (8.118)

202 8 skyrius
a) b)
8.6 pav. Elektrono, esančio kvantiniamešulinyje, sukinio precesijos trajektorijosant Blocho sferos. Abu paveikslai vaiz-duoja tas pačias trajektorijas, tik stebintskirtingais kampais: a) žiūrint iš šonoσ1
kryptimi ir b) žiūrint iš viršaus σ3 kryp-timi (matosi tik apskritimo briauna). Vi-sais atvejais trajektorijos yra apskritimai
Kaip ir anksčiau, tokios lygties sprendinys yra eksponentė, kurios rodiklyje stovibivektorius,
ψSO =e−αR(k2Iσ1−k1Iσ2)t
=cosωst− (sin θIσ1 − cos θIσ2) sinωst .(8.119)
Kampas θ jame apskaičiuojamas iš bangos vektoriaus sandų santykio tg θ =k2/k1. Paskutinėje eilutėje eksponentę išskleidėme trigonometrinėmis funkci-jomis, kad aiškiai matytume, jog sprendinys osciliuoja dažniu ωs = αRk, ku-ris proporcingas sukinio ir orbitos sąveikos stiprumui. Atkreipsim dėmesį, kadeksponentė lygtyje (8.117) irgi osciliuoja, tik kitu, išsigimusios juostos energi-jos dažniu µk2/2. Šios osciliacijos neturi jokios įtakos sukinio precesijai, nesψdσ3ψd = 0. Todėl sukinio evoliuciją aprašo formulė
s(t) =ψSOψ0σ3ψ0ψSO
=e−αR(k2Iσ1−k1Iσ2)tψ0σ3ψ0eαR(k2Iσ1−k1Iσ2)t,
(8.120)
kurioje ψ0 yra pradinis spinorius laiko momentu t = 0. Pastarasis tenkina są-lygą ψ0ψ0 = 1. Formulė (8.120) turi aiškią geometrinę interpretaciją. Rotoriusψ0 pasuka sukinį, kuris nukreiptas išilgai kvantavimo ašies σ3, į pradinę padė-tį. Po to eksponentinis narys jį suka apskritimu, t. y. vyksta sukinio precesija.Praktiniu požiūriu svarbu tai, kad precesijos dažnis priklauso nuo αR, kurį ga-lima keisti statmenu šulinio sienelėms elektriniu lauku. O tai sudaro prielaidassukinio tranzistoriui sukurti.
Iki šiol manėm, kad momentu t = 0 pradinis elektrono sukinys sutampa sukvantavimoašimi. Kitaip tariant, pradinis spinoriusbuvoψ0 = 1. Tuo atveju, kaijis lygus ψ0 = (Iσ1 + Iσ2 + Iσ3)/
√3, precesijos trajektorijos įvairiems bangos
vektoriams (skirtingiems kampams θ) pavaizduotos 8.6 paveiksle. Jei formu-lėje (8.120) eksponentes išreikštume sinusais ir kosinusais ir gautoje išraiškojeišrinktume tik tuos narius, kurie nepriklauso nuo laiko, gautume precesijos ašies

Schrödingerio-Paulio kvantinė mechanika 203
formulę, t. y. ašį, apie kurią precesuoja sukinys1. Galima parodyti, kad precesi-jos ašį nusako vektorius (cos θσ2 − sin θσ1), kuris yra statmenas bangos vekto-riui k = k(cos θσ1 + sin θσ2). Elektrono sukinio elgesys medžiagose, kuriosesvarbi sukinio ir orbitos sąveika, primena fotono poliarizacijos elgseną dvigu-bo šviesos lūžio kristaluose. Jei pagal sukinį poliarizuotas elektronas atsispindiarba prasiskverbia pro potencinį barjerą, kaip ir optikoje, gali atsirasti papildo-ma (ekstraordinarinė) elektroninė banga. Daugiau apie tai rašoma straipsniuo-se [11, 15, 27, 38–41].
1Galima elgtis ir kitaip. Kadangi precesijos trajektorija apskritimas, precesijos ašį galimarasti kaip dviejų vektorių s(t) sumą skirtingais momentais — momentu t = 0 ir momentu, kaifazė trigonometrinėse funcijose pasikeičia per π.


9. Cl1,3 algebra ir reliatyvumo teorija
Specialioji reliatyvumo teorija gimė 1905-siais, kuomet A. Einsteinasstraips-nyje „Apie judančių kūnų elektrodinamiką“ paskelbė savo garsųjį šviesos grei-čio pastovumo principą. Iki tol elektromagnetinių bangų sklidimas, panašiai kaipbangų sklidimas vandens paviršiuje, buvo aiškinamas visur esančios mistinės ter-pės — eterio — osciliacijomis. Kaip dažnai būna fizikoje, pati reliatyvumo idėjajau kurį laiką sklandė ore. Pavyzdžiui, W. Voigtas dar 1887 m. užrašė specialio-sios reliatyvumo teorijos koordinačių transformacijos formules, kurias maždaugtuo pat metu išvedė ir kiti fizikai — G. Fitzgeraldas, J. Larmoras, H. Lorentzas— ir kurios paaiškino 1881 m. A. Michelsono eksperimento rezultą, kad šviesosgreitis Žemės judėjimo ir jai priešinga kryptimi yra toks pats. Šis eksperimentinisfaktas prieštaravo eterio, kurio atžvilgiu juda Žemė, egzistavimui.
Manysime, kad skaitytojas jau turi šiokį tokį supratimą apie specialiąją relia-tyvumo teoriją, kuri lietuvių kalba aprašyta, pavyzdžiui, vadovėlyje [42], ir kuriyra gerokai paprastesnė už gravitaciją aiškinančią bendrąją reliatyvumo teoriją.Šiame skyriuje į specialiąją reliatyvumo teoriją gilinsimės taikydami Cliffordoalgebros matematinį aparatą. Tikimės, kad taip suformuluota teorija pasirodyspaprastesnė ir aiškesnė. Be to, skaitytojas galės įsitikinti, kad geometrinė algeb-ra Minkowskio erdvę leidžia geometrizuoti lygiai taip pat, kaip ir mokyklinėsgeometrijos Euklido erdvę. Skirtumas tik toks, kad Minkowskio edvės metrikajau nėra visur teigiamai apibrėžta, todėl vietoje paprastų trigonometrinių funkcijųdar pasirodo ir hiperbolinės trigonometrinės funkcijos.
9.1. Cl1,3 algebra
Reliatyvumo teoriją mes formuluosime Cl1,3 algebroje, kuri dar vadinamaerdvėlaikio algebra (angl. STA = Space-Time Algebra). Šios algebros vektorinėserdvės bazę sudaro vektoriai e1, e2, e3, e4. Pirmojo iš jų kvadratas yra teigia-mas, e21 = 1, o likusiųjų i = 2, 3, 4 neigiamas, e2i = −1. Todėl bazinis vektoriuse1 rodo laiko kryptį, likusieji sudaro trimatės erdvės bazę, o erdvėlaikio signa-tūra yra maišyta, (+,−,−,−). Tai, kad erdvinių bazinių vektorių kvadratai yra
205

206 9 skyrius
Rangas 0 1 2 2 3 4GA 1 e1, e2, e3, e4 e21, e31, e41 e43, e24, e32 e432, e143, e1234
e124, e132DM 1 γ0, γ1, γ2, γ3 γ10, γ20, γ30 γ32, γ13, γ21 γ321, γ032, γ0123
γ013, γ021Rel. 1 γ0, γ1, γ2, γ3 σ1,σ2,σ3 Iσ1, Iσ2, Iσ3 Iγ0, Iγ1, I =
Iγ2, Iγ3 σ123
9.1 lentelė. Tos pačios Cl1,3 algebros bazinių elementų žymėjimai geometrinėjealgebroje (GA), Diraco matricomis (DM) ir reliatyvistinėje algebroje (Rel.)
neigiami skaičiai, jokios fizikinės prasmės neturi. Reliatyvumo teorijai aprašyti— o taip dažnai daro matematikai — taip pat galėtume naudoti ir Cl3,1 algebrą.Jos signatūra yra (+,+,+,−), kurioje laiko kryptį rodo ketvirtasis vektorius.Nors Cl1,3 ir Cl3,1 algebros, griežtai kalbant, nėra izomorfiškos, tačiau jų fizi-kinių (matuojamų) dydžių poerdviai, pasirodo, yra izomorfiški. Tai reiškia, kadalgebros pasirinkimas fizikinio teorijos turinio nepakeičia.
Cl1,3 algebrą sudaro 21+3 = 16 bazinių elementų: skaliaras, 4 vektoriai ei,6 bivektoriai eij , 4 trivektoriai (pseudovektoriai) eijk ir pseudoskaliaras e1234.Fizikiniuose taikymuose visus juos žymėsime kitais simboliais. Taip, kaip 8 sky-riuje Cl3,0 algebros bazinių vektorių žymėjimui panaudojome Paulio matricų σiraides, dabar bazinius vektorius žymėsime Diraco matricų γi simboliais, t. y.γ0 ≡ e1, γ1 ≡ e2, γ2 ≡ e3 ir γ3 ≡ e4. Šiuos vektorius atitinka tokios stan-dartinės 4× 4 Diraco matricos:
γ1 =
0 0 0 −10 0 −1 00 1 0 01 0 0 0
, γ2 =
0 0 0 i0 0 −i 00 −i 0 0i 0 0 0
, γ3 =
0 0 −1 00 0 0 11 0 0 00 −1 0 0
,
γ0 =
1 0 0 00 1 0 00 0 −1 00 0 0 −1
.
(9.1)
Jų kvadratai dera su algebros signatūra γ20 = 1 ir γ21 = γ22 = γ23 = −1, kur sim-boliu 1 pažymėjome vienetinę 4× 4 matricą. Cl1,3 algebros bivektorius, trivek-torius ir pseudoskaliarą gausime sudauginę atitinkamus bazinius vektorius arbajų atvaizdų (9.1) matricas.

Cl1,3 algebra ir reliatyvumo teorija 207
9.1 pav. Reliatyvistinis bivekto-rių šešiakampis. Punktyrinės li-nijos jungia dualius bivektorius
Knygose dažniausiai naudojami žymėjimai pa-teikti 9.1 lentelėje. Mes naudosime reliatyvis-tinius žymėjimus, iš kurių iš karto matyti, kadalgebroje yra dviejų rūšių bivektoriai. Pirmie-ji trys vadinami laikiškaisiais, nes yra gaunamiγi padauginus iš laiko ašies bazinio vektoriausγ0. Šių bivektorių kvadratas yra teigiamas,
σk = γkγ0, σ2k = 1, k = 1, 2, 3. (9.2)
Kiti trys bivektoriai yra erdviškieji:
Iσ1 =γ3γ2, Iσ2 = γ1γ3, Iσ3 = γ2γ1,
(Iσk)2 =− 1, k = 1, 2, 3.
(9.3)
Jų, kaip ir Cl3,0 algebros bivektorių, kvadrataiyra neigiami. Į Iσi patogu žiūrėti kaip į vieną simbolį. Tačiau kai prireiks, pseu-doskaliarą I = γ0123 ≡ γ0γ1γ2γ3 galėsime iškelti, nes pastarasis komutuoja sulyginiais algebros elementais, t. y. Iσi ≡ Iσi = σiI ir IIσi = IσiI = −σi.Visi šeši keturmatės erdvės bivektoriai, kurie schematiškai pavaizduoti 9.1 pav.,yra svarbūs Lorentzo transformacijai. Kaip netrukus pamatysime, trys iš jų apra-šo paprastą sukimą trimatės erdvės plokštumose Iσi, o likusieji — reliatyvistinestransformacijas, kai stebėtojo koordinačių sistema juda plokštumose σi = γiγ0.
Cl1,3 algebros trivektorius galima užrašyti kaip pseudoskaliaro ir vektoriaussandaugą,
Iγ0 = γ3γ2γ1, Iγ1 = γ0γ3γ2, Iγ2 = γ0γ1γ3, Iγ3 = γ0γ2γ1. (9.4)
Reliatyvumo teorijoje jie svarbesnio vaidmens nevaidina.Aukščiausio ketvirto rango algebros elementas yra pseudoskaliaras. Jį pato-
gu užrašyti dviem pavidalais: kaip vektorių ir kaip bivektorių geometrinę san-daugą,
I = γ0γ1γ2γ3 = σ1σ2σ3, I = γ3γ2γ1γ0 = I, I2 = −1. (9.5)
Cl1,3 pseudoskaliaras komutuoja su lyginio rango multivektoriais (skaliaru ir bi-vektoriais), tačiau antikomutuoja su nelyginio rango multivektoriais (vektoriaisir trivektoriais). Knygos gale, 13.1 lentelėje, rasite Cl1,3 algebros formulių su-vestinę.
9.1 pavyzdys. Įsitikinkime, kad pseudoskaliaro ir vektoriaus sandauga tikrai duo-da (9.4) trivektorius. Iš tiesų, Iγ1 = γ0γ1γ2γ3γ1 = −γ0γ2γ3 = γ0γ3γ2, ir t. t.

208 9 skyrius
Rangas 0 2 2 4
Cl+1,3 1 γ1γ0, γ2γ0, γ3γ0 γ3γ2, γ1γ3, γ2γ1 I = γ0γ1γ2γ3Cl3,0 1 σ1, σ2, σ3 Iσ1, Iσ2, Iσ3 I = σ1σ2σ3
9.2 lentelė. Cl+1,3 poalgebrės ir Cl3,0 algebros atitikmuo
Bazinių elementų žymėjimus pasirinkome neatsitiktinai. Jie pabrėžia faktą,kad reliatyvistinės algebros lyginis poaibis Cl+1,3 sutampa su anksčiau nagrinėtaklasikinėsfizikosCl3,0 algebra. Šį atitikimą iliustruoja9.2 lentelė. Iš jos matome,kad laikiškieji bivektoriai atitinka Cl3,0 algebros vektorius. Todėl priklausomainuo konteksto σi vadinsim arba vektoriumi, arba bivektoriumi.
9.2 pavyzdys. Parodysime, kad σ123 yra pseudoskaliaras. Iš tiesų,
σ123 = σ1σ2σ3 = γ10γ20γ30 = γ1γ0γ2γ0γ3γ0 = −γ1γ0γ2γ0γ0γ3= γ0γ1γ2γ3 = I.
(9.6)
9.3 pavyzdys. Be (9.1) matricų, reliatyvistinėje kvantinėje mechanikoje dažnai sutin-kama dar viena matrica γ5 = −iγ0γ1γ2γ3. Sudauginę randame, kad
γ5 =
0 0 1 00 0 0 1
1 0 0 00 1 0 0
, γ25 = 1. (9.7)
Geometrinės algebros požiūriu γ5 nėra vektorius. Dar daugiau, sudauginę visas įmano-mas matricų kombinacijas galite įsitikinti, kad γ5 matricos neatitinka joks Cl1,3 algebrosbazinis elementas. Tai reiškia, kad γ5 matrica nepriklauso Cl1,3 algebrai.
Reliatyvumo teorijoje dažnai sutinkame eksponentes, kurių rodiklyje stovibivektorius σi arba Iσi. Jas dauginti iš kokio nors kito algebros elemento busdaug patogiau, jei eksponentes užrašysime trigonometrinėmis funkcijomis. Tailengva padaryti, eksponentę išskleidus Tayloro eilute ir surinkus narius prie ska-liarų ir bivektorių, kaip jau esame darę išvesdami (4.67) formulę. Pritaikę baziniųbivektorių savybę σ2
i = 1, gauname
eϕσi =∞∑
k=0
Äϕσiäk
k!=
∞∑
k=0
Äϕσiä2k
2k!+
∞∑
k=0
Äϕσiä2k+1
(2k + 1)!
=∞∑
k=0
ϕ2k
2k!+ σi
∞∑
k=0
ϕ2k+1
(2k + 1)!= chϕ+ σi shϕ.
(9.8)
Paskutiniame žingsnyje pasinaudojome hiperbolinių funkcijų Tayloro eilutės api-brėžimu. Matome, kad dauginant iš kito algebros elemento dabar reikia apskai-

Cl1,3 algebra ir reliatyvumo teorija 209
9.2 pav. Hiperbolinio sinuso,kosinuso, tangento ir kotangentografikai
čiuoti tik dauginamo elemento ir vieno bivek-toriaus, o ne begalinės jų laipsnių sumos san-daugą. Todėl skaičiavimai tampa paprastesni.Jei vietojeσi eksponentėjeyra Iσi, kurių kvad-ratas, kaip žinome, yra neigiamas, Iσ2
i = −1,tuomet atlikus tuos pačius veiksmus, kaip ma-tėme iš (4.67) formulės, vietoje hiperboliniųfunkcijų pasirodo trigonometrinės,
eϕIσi = cosϕ+ Iσi sinϕ . (9.9)
Taigi, Cl1,3 algebroje bivektoriai generuojatiek trigonometrines, tiek hiperbolines funkci-jas. Pastarųjų grafikai pavaizduoti 9.2 pav., kurhiperbolinį tangentą ir kotangentą apibrėžia taspats hiperbolinių funkcijų santykis: thx =
shx/ chx ir cthx = chx/ shx. Kaip matome, hiperbolinės funkcijos, skirtingainuo trigonometrinių,nėra periodinės, tačiau joms irgi būdinga lygiškumosavybė.
Dabar pažvelkime į apgrąžos (reversijos) operaciją Cl1,3 algebroje. Lengvaįsitikinti, kad apgręžus bivektorius jų ženklas pasikeičia,
σi = −σi, Iσi = −Iσi. (9.10)
Reliatyvumo teorijoje naudinga įvesti dar vieną operaciją, kurią pavadinsim erd-
vėlaikio sujungtinumu. Ją žymėsime brūkšneliu ir bangele virš multivektoriaus ˜A.
Nuo 2 skyriuje aptartos Cliffordo involiucijos operacijos ÛA ji skiriasi tuo, kad da-bar vietoje rango inversijos ÛA, kuri pakeičia visų be išimties vektorių ženklus įpriešingus, naudosime operaciją A, kuri pakeičia tik erdvės vektorių ženklą, t. y.laiko vektoriaus krypties brūkšnelisnepakeičia. Taigi, erdvėlaikio sujungtinumasyra apgrąža + trimatės erdvės inversija. Operaciją apibrėžiame tik Cl1,3 algebrosobjektams1. Pritaikę ją Cl1,3 bivektoriams σi ir Iσi gauname
≃σi = γ0σiγ0 = σi,
≃Iσi = γ0Iσiγ0 = −Iσi. (9.11)
Vidurinėse išraiškose erdvėlaikio sujungtinumą užrašėme kaip apgrąžą, iš abie-jų pusių apgaubtą γ0. Toks apgaubimas ir yra erdvinė inversija, nes ji pakeičiakoordinačių γ1, γ2 ir γ3 ženklus multivektoriuose. Pavyzdžiui, γ0γ1γ0 = −γ1,arba γ0σ1γ0 = γ0γ1γ0γ0 = −σ1, arba γ0Iγ0 = γ0γ0γ1γ2γ3γ0 = −I , arba
112 skyriuje matysime, kad tokio tipo involiuciją, kuri dažnaivadinama pseudoautomorfizmu,galima apibrėžti visose maišytos signatūros Cliffordo algebrose, Clp,q , kur p, q ≥ 1.

210 9 skyrius
γ0Iσ1γ0 = γ0γ3γ2γ0 = Iσ1. Pastarąją išraišką galima gauti ir pasinaudojusanksčiau apskaičiuotu rezultatu γ0Iσ1γ0 = γ0Iγ0γ0σ1γ0 = (−I)(−σ1) = Iσ1.
9.2. Erdvėlaikis, įvykiai ir invariantiniai intervalai
Erdvėlaikis yra ne kas kita, kaip mus supančios Visatos matematinis modelis.Tokiu matematiniu modeliu laikysime Cl1,3 algebrą. Kuo modelis paprastenis irtiksliau aprašo eksperimentą, tuo jis geresnis. Tiesa, ryšys tarp teorinio erdvė-laikio modelio ir to, ką matuoja eksperimentatoriai, dažnai yra painus, bet Cl1,3algebra jį padaro paprastesniu ir lengviau suprantamu.
Reliatyvumo teorijos esmę sudaro įžvalga, kad tokie skirtingi fizikiniai dy-džiai kaip laikas t ir erdvinės koordinatės x = (x1, x2, x3), priešingai nei sakovisa mūsų kasdienė patirtis, yra tarpusavyje glaudžiai susiję. Šie keturi dydžiaitraktuojami kaip keturmačio erdvėlaikio taškai (Cl1,3 spinduliai-vektoriai) ir yravadinami reliatyvistiniais įvykiais,
x = x0γ0 + x1γ1 + x2γ2 + x3γ3. RELIATYVISTINIS ĮVYKIS(9.12)
Čia γµ yra algebros baziniai vektoriai, x0 = ct yra laiko, o x1, x2 ir x3 erdvi-nės koordinatės. Raide c įprasta žymėti šviesos greitį, kuris dažnai prilyginamasvienetui. Toks reliatyvistinis įvykis, pavyzdžiui, yra šviesos kvanto išspindulia-vimas x0 laiko momentu erdvės taške (x1, x2, x3). Manysim, kad laikas t yramonotoniškai auganti funkcija, t. y., skirtingai nei erdvinės koordinatės, tas patslaiko momentas niekada nepasikartoja. Todėl nežiūrint, ar dalelė stovi, ar ju-da erdvėje, erdvėlaikyje ji visada brėžia trajektoriją, vadinamą pasauline linija.Postuluojama, kad laisvos, t. y. inertiškai judančios, dalelės trajektorija erdvėlai-kyje yra tiesė. Taigi, dvi pastoviu greičiu viena kitos atžvilgiu judančios dalelėserdvėlaikyje brėžia tieses, besiskiriančias tik savo polinkio kampais. Specialio-ji reliatyvumo teorija tvirtina, kad visi fotonai (arba tiesiog šviesa) erdvėlaikyjesklinda pastoviu greičiu, todėl jų pasaulinės linijos yra tiesės. Šviesos trajektori-jos reliatyvistinėje mechanikoje vaidina išskirtinį vaidmenį. Todėl pirmiausia irišsiaiškinkime, kuo skiriasi masyvios dalelės ir šviesos fotono trajektorijos erd-vėlaikyje.
Sutarkime, kad bazinis vektorius γ0 visada žymės laiko ašį, o γ1, γ2 ir γ3— erdvines ašis. Skirtingai nei Euklido erdvėje, dabar indeksų padėtis (apačiojeγi ar viršuje γi) yra svarbi net ir ortonormuotoje bazėje. Taip yra todėl, kad nevisų keturmačių bazinių vektorių kvadratai yra to paties ženklo, todėl dualiosbazės vektorių ženklai, bendrai paėmus, skiriasi, kaip matyti iš (6.68) formulių6 skyriuje. Apatiniai baziniai vektoriai tenkina sąryšius
γ20 = 1, γ21 = γ22 = γ23 = −1. (9.13)

Cl1,3 algebra ir reliatyvumo teorija 211
Tada specialiosios reliatyvumo teorijos erdvėlaikio metriką apibrėžia šie baziniųvektorių sąryšiai:
12
Äγµγν + γνγµ
ä= γµ · γν = gµν, gµν = diag(1,−1,−1,−1). (9.14)
Čia gµν žymi metrinio tenzoriaus sandus. Kaip matome, ortonormuotoje bazėješis tenzorius yra diagonalus, t. y. gµν = 0, jei µ 6= ν. Tokius pačius algebriniussąryšius (9.14) tenkina ir Diraco γµ matricos (9.1).
9.4 pavyzdys. Cl1,3 algebros metrinį tenzorių gij nusako matrica, kurios elementaiyra vektorių vidinės sandaugos ei · ej ,
gij =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
. (9.15)
Pasinaudoję atvirkštinės bazės apskaičiavimo formule (6.68) parodykite, kad Cl1,3 al-gebros atvirkštinis metrinis tenzorius gij sutampa su gij , t. y. gij = ei · ej = gij .
Siekdami didesnio aiškumo susitarkime dėl indeksų žymėjimų. Būtent grai-kiškus indeksus µ, ν sutarkime rašyti tada, kai turime mintyje visus keturis erd-vėlaikio sandus 0, 1, 2 ir 3. Tačiau jei norėsime pabrėžti, kad dirbame tik su erdvi-niais sandais, indeksus rašysim lotyniškomraidėm. Pavyzdžiui,γµ = γ0, γi,kur i = 1, 2, 3. Reliatyvistinį įvykį šiais žymėjimais galime užrašyti tokiu būdu:x = xµγµ = ctγ0 + xiγi. Taigi, laikykime, kad mus supanti Visata yra ketur-matė. Ji tęsiasi laike, kurio ašies bazinis vektorius yra γ0 ir turi tris erdviniusmatavimus (bazė γi), o jos metrika (+,−,−,−). Toks erdvėlaikis vadinamasKaune gimusio matematiko H. Minkowskio vardu. Fiksuodami konkrečią bazi-nių vektorių γµ sistemą kartu užduodam ir stebėtoją erdvėlaikyje.
Keturmačio vektoriaus kvadratą pavadinsime intervalu:
x2 = (ct)2 − (x1)2 − (x2)2 − (x3)2. INTERVALAS (9.16)
Vektoriaus intervalas gali būti tiek teigiamas, tiek ir neigiamas dydis, t. y. x2 =ǫx|x2|, kur ǫx = ±1. Taigi, pastebėjome principinį skirtumą nuo trimatės Eukli-do erdvės, kurioje atstumo tarp dviejų taškų kvadratas yra visada teigiamas dydis(arba nulis). Dėl šios priežasties Cl4,0 algebra, kuri taip pat keturmatė, nėra tin-kamas modelis, nes joje atstumo kvadratas yra teigiamas dydis. Kita svarbi Cl1,3algebros savybė ta, kad joje egzistuoja nuliniai multivektoriai (angl. null mul-
tivector). Pavyzdžiui, toks yra bivektorius B = (γ0 + γ1)γ2. Apskaičiavę jokvadratą įsitikiname, kad šis lygus nuliui: B2 = (γ0 + γ1)γ2(γ0 + γ1)γ2 =−(γ0 + γ1)(γ0+ γ1) = −(−1+ 1+ γ0γ1 + γ1γ0) = 0. Nuliniai vektoriai labaisvarbūs formuluojant reliatyvumo teoriją.

212 9 skyrius
Intervalą galima apibrėžti ne tik erdvėlaikio spinduliui-vektoriui, kaip (9.16)formulėje, bet ir bet kuriems dviems erdvėlaikio įvykiams,
∆x2 = (c∆t)2 − (∆x1)2 − (∆x2)2 − (∆x3)2. (9.17)
Kaip minėjome, stebėtojus erdvėlaikyje nusako koordinačių sistemos, kurias sa-vo ruožtu apibrėžia jų baziniai vektoriai. Pavyzdžiui, γµ ir γ ′µ žymi du skirtingusstebėtojus. Postuluojame, kad bet koks skirtumas (intervalas) tarp keturmačiųįvykių (kuris geometriškai reiškia atstumą tarp dviejų keturmatės erdvės taškų),nepriklauso nuo to, kuris iš stebėtojų tuos įvykius stebi. Kitaip tariant, visi ste-bėtojai, stebintys fizikinį procesą, prasidėjusį viename erdvėlaikio taške ir pa-sibaigusį kitame, išmatuoja (kaip tai padaryti, dabar mums nesvarbu) vienodąketurmatį atstumą tarp abiejų įvykių. Jei erdvėlaikyje turime du stebėtojus γµ irγ ′µ, pagal šį postulatą galime rašyti, x2 = x′2 arba (∆x)2 = (∆x′)2. Tai jokiubūdu nereiškia, kad abu stebėtojai išmatuos vienodus laikų ar erdvinių koordina-čių skirtumus. Kaip tik atvirkščiai: būtent keturmačio intervalo tvermė sąlygoja,kad skirtingais greičiais judantys stebėtojai nesutars nei dėl laiko skirtumo tarpįvykių, nei dėl įvykius skiriančio trimačio atstumo.
Eksperimentiniai matavimai rodo, kad šviesos greitis yra vienodas visų iner-cinių sistemų stebėtojams. Kitaip tariant, bet kurioje pastoviu greičiu judančioje(ar stovinčioje) koordinačių sistemoje, sakysim, γµ ir γ ′µ, yra išmatuojamas tokspats šviesos greitis c, t. y. turime c = c′. Kadangi greitis apskaičiuojamas nueitąatstumą dalinant iš sugaišto laiko, galime rašyti
c =
»(x1)2 + (x2)2 + (x3)2
t, c′ =
»(x′1)2 + (x′2)2 + (x′3)2
t′. (9.18)
Kadangi c = c′, tai abi lygčių puses pakėlę kvadratu ir viską perkėlę į vieną pusęgauname (ct)2−(x1)2−(x2)2−(x3)2 = 0 ir (ct′)2−(x′1)2−(x′2)2−(x′3)2 = 0.Palyginę su (9.17) matome, kad gavome tą patį postuluotą intervalo tvermės dės-nį. Taigi, pastovus šviesos greitis reiškia intervalo tvermę. Ir atvirkščiai, iš ketur-mačio intervalo tvermės dėsnio išplaukia, kad visiems stebėtojams šviesos greitisyra vienodas2. Intervalai, kurių vertė yra nulis, x2 = 0, vadinami šviesiškaisiais.Tai ir yra minėta šviesos trajektorijos erdvėlaikyje ypatybė: keturmatis atstumastarp įvykių, kuriuos jungia šviesos greičiu sklindanti dalelė, visada yra nulis. Išto išplaukia vienas iš galimų filosofinių paaiškinimų kodėl matome daiktus apie
2Žinoma, tai teisinga tik inerciniams stebėtojams, matuojantiems šviesosgreitį vakuume. Ter-pėje, sakysime, šviesolaidyje, šviesos greitis bus mažesnis nei vakuume, nes medžiagos atomaišviesą sugeria ir vėliau perspinduliuoja. Dėl šios priežasties tam tikrose terpėse šviesos sklidimągalima beveik sustabdyti [30].

Cl1,3 algebra ir reliatyvumo teorija 213
9.3 pav. Šviesos kūgis x2 = 0 erdvėlaikyje. Paro-dytos tik laiko γ0 ir dvi erdvės ašys γ1 ir γ2. Priežas-tingumo ryšiais susieti įvykiai yra kūgio viduje. Taippat pavaizduotos dvi bivektorinės plokštumos, laikiš-koji σ1 = γ1γ0 ir erdviškoji Iσ3 = γ2γ1, iš kuriųkonstruojami atitinkamai stūmio (būsto) ir erdvinio po-sūkio rotoriai. Kadangi erdvėlaikyje nubrėžtos koordi-načių ašys priklauso nuo stebėtojo (čia stebėtojas pa-vaizduotas rimties būsenoje), tai erdvėlaikio suskaidy-mas į bivektorinesplokštumas irgi priklauso nuo stebė-tojo būsenos. Žinoma, čia nupieštą vaizdą galėtų ma-tyti tik išorinis stebėtojas, t. y. toks, kuris mato ne tiktrimatę erdvę, bet ir praeitį bei ateitį tuo pačiu metu
save: tuo momentu, kai nuo daikto, esančio atstumu x, atsispindėjusi šviesa pa-siekia mūsų akį, keturmatis atstumas (intervalas) tarp daikto ir akies virsta nuliu.Tai reiškia, kad momentu t = |x|/c akis ir daiktas (skirtingi erdvėlaikio taškai)tam tikra prasme susitapatina. Tada daiktą ir pamatom.
9.3 paveiksle nupieštas šviesos kūgis, kurio lygtis x2 = 0. Pavaizduoti tiktrys γ0, γ1, γ2 baziniai vektoriai, todėl kūgis yra dvimatis. Tikrasis šviesoskūgis būtų trimatis „paviršius“, patalpintas keturmatėje erdvėje. Išilgai šio kūgiosudaromųjų sklinda šviesos spinduliai. Ašis γ0 atitinka nejudančios dalelės pa-saulinę liniją. Mažesniu už šviesos greitį judančių dalelių trajektorijų (pasauliniųlinijų) polinkis yra mažesnis už kūgio viršūnės kampą. Taigi, visų tokių dale-lių pasaulinės linijos yra kūgio viduje. Kitaip tariant, intervalas tarp stebėtojoir bet kokio kūgio viduje esančio įvykio yra teigiamas x2 > 0, todėl juos galisieti priežastingumo ryšys. Tuo tarpu iš koordinačių centro į kūgio išorėje esantįtašką nubrėžtos tiesės polinkis jau bus didesnis už šviesos signalo, kurio x2 = 0,polinkį. Tai reiškia, kad priežastinį ryšį tarp šių dviejų įvykių galėtume sukurtitik pasiuntę signalą greičiau už šviesą. Kaip netrukus matysime, to padaryti ne-leidžia greičių sudėties taisyklė. Todėl stebėtojo ir kūgio išorėje esančio įvykiopriežastinis ryšys sieti negali.
Netrukus įsitikinsime, kad gerai žinomos reliatyvistinės Lorentzo transfor-macijos yra ne kas kita, o apibendrinti sukimai erdvėlaikio plokštumose. 9.3 pa-veiksle pavaizduotos dvi iš šešių tokių bivektorinių plokštumų. Viena iš jų erd-viškoji Iσ3 = γ2γ1, kita laikiškoji σ1 = γ1γ0. Bendrą laikiškąjį bivektorių išviso nusako trys „koordinatinės“plokštumosσ1,σ2 irσ3. Laikiškųjųbivektorių,į kuriuos įeina bazinis laiko vektorius γ0, kvadratas yra teigiamas,
σi ≡ γiγ0, σ2i = 1 . (9.19)

214 9 skyrius
Jei laikiškoje plokštumoje atliktume sukimą, jis transformuotų ne tik erdvės, betir laiko koordinatę. Sukimus laikiškose plokštumose γiγ0 vadinsime stūmiais(angl. boost augimas, didėjimas).
Trys erdviškieji bivektoriai gaunami dauginant tik erdvės bazinius vektorius,
Iσ1 = γ3γ2, Iσ2 = γ1γ3, Iσ3 = γ2γ1 . (9.20)
Jų kvadratai neigiami (Iσi)2 = −1 , todėl sukimai šių bivektorių plokštumoseniekuo nesiskiria nuo įprastų sukimų, kuriuos aprašo Cl3,0 algebra.
9.3. Lorentzo transformacija arba sukimai erdvėlaikyje
Įsivaizduokime, kad erdvėlaikyje turime du įvykius, kuriuos stebi du stebė-tojai. Klasikinėje, t. y. nereliatyvistinėje mechanikoje laikas ir koordinatės nėratarpusavyje susiję dydžiai, todėl stovinčio t,x ir v greičiu judančio t′,x′stebėtojų išmatuotus įvykių laikus ir atstumus sieja gerai žinomas sąryšis
t′ = t, x′ = x− vt , (9.21)
vadinamas Galilei’aus transformacija. Iš jo matyti, kad skirtingų stebėtojų išma-tuotos erdvinės koordinatės yra pastumtos viena kitos atžvilgiu, tačiau ir laikotarpą, ir erdvinį atstumą tarp įvykių abu stebėtojai išmatuoja tą patį. Paanalizuo-kime tą pačią situaciją manydami, kad abiems stebėtojams reliatyvistinis interva-las (9.16) tarp įvykių išlieka toks pats. Kadangi laiko ir erdvės koordinates dabarsaisto sąryšis (9.16), tai stovinčio ir judančio pastoviu greičiu stebėtojų išmatuotilaiko ir erdvinių koordinačių skirtumai atskiriems stebėtojams neprivalo sutap-ti. Svarbu tik, kad nepasikeistų jų kvadratų skirtumas. Tai kiek primena sukimotransformaciją, kurią atliekant x1 ir y1 koordinatės keičiasi, tačiau jų kvadratųsuma išlieka tokia pati. Panašumas nėra atsitiktinis. Pasirodo, dviejų skirtin-gais greičiais judančių stebėtojų stebinius susieja Lorentzo transformacija, kuriyra Euklido erdvės ortogonaliosios transformacijos analogas erdvėlaikyje. Pa-prasčiau kalbant, Lorentzo transformacija yra tiesiog sukimas, tik ne Euklido, oketurmatėje Minkowskio erdvėje.
Kvadratų skirtumo nekeičia ir keturmatės erdvės atspindžio transformacijos.Tačiau atspindžiai yra diskretinės transformacijos. Jos sunkiai dera su tolydiniaisprocesais, todėl čia jų neaptarinėsime. Toliau nagrinėsim tik tikruosius sukimus,t. y. tokius, kurie vektorių x perveda į kitą vektorių x′ pagal gerai žinomą vek-toriaus sukimo formulę x′ = LxL−1, o rotorius L yra normuotas |L| = 1. Beto, norėdami, kad sukimas erdvėlaikyje nekeistų laiko krypties, pareikalausime,kad pradinio ir pasukto vektoriaus vidinė sandauga išliktų teigiama x ·x′ > 0 (or-tochroniškumo sąlyga). Šiuos reikalavimus tenkinanti transformacija vadinama

Cl1,3 algebra ir reliatyvumo teorija 215
9.4 pav. „Apskritimas“dvimačiame erdvėlaiky-je. Trūkiosios linijos ro-do dvimatį šviesos kūgį
tikrąja ortochronine Lorentzo transformacija, arbatiesiog Lorentzo sukimu. Bus vaizdžiau, jei pirmiau-sia susipažinsime su tokio sukimo geometrine inter-pretacija vienoje koordinatinėje plokštumoje.
9.3.1. Sukimas vienoje erdvės ir laiko plokštu-moje. Gerai žinome, kad Euklido plokštumoje suka-mo vektoriaus galas brėžia apskritimą. Geometrijojeapskritimu vadinama aibė taškų, kurių atstumas nuotaško, vadinamo apskritimo centru, yra vienodas.
O kaip atrodytų Minkowskio plokštumos apskri-timas, jei jį pavaizduotumeEuklidoplokštumoje? Ar-ba paklausus kitaip, kokią trajektoriją Euklido plokš-tumoje brėžia vektoriaus, sukamo erdvės ir laiko plokštumoje, galas?
Norėdami tai išsiaiškinti paimkime pačią paprasčiausią reliatyvistinę algeb-rą Cl1,1. Joje nesunku apskaičiuoti atstumo tarp koordinačių centro ir kito taškokvadratą x2 = (tγ0 + aγ1)
2 = t2 − a2. Kai atstumas fiksuotas, t. y. kai x2 = 1,kreivė pavaizduota 9.4 paveiksle. Matome, kad „apskritimą“ sudaro keturios įhiperboles panašios kreivės, kurias vieną nuo kitos skiria koordinačių pradžiojebesikertantys šviesiškieji intervalai3. Paveiksle taip pat pavaizduoti du stovinčiostebėtojo koordinačių sistemos vektoriai, laikinis γ0 ir erdvinis γ1, kurių galaiguli ant „apskritimo“ x2 = 1. Sukant šių vektorių galai judės „apskritimo“ tra-jektorijomis. Norėdami sukimą plokštumoje γ0γ1 atskirti nuo grynai erdviniosukimo šią Lorentzo transformaciją vadinsime stūmiu. Kaip netrukus įsitikinsi-me, po tokio „pasukimo“ stovinčio stebėtojo sistema ima judėti pastoviu greičiu,tarsi ją kas būtų stumtelėjęs iš rimties būsenos. Lorentzo stūmio transformacija,kurią atlikus iki tol stovėjęs kūnas iš tiesų pradeda judėti, literatūroje vadinama„aktyvia“. Tačiau tą pačią transformaciją galima suprasti ir kaip „pasyvią“. Šiuoatveju turima mintyje du skirtingu greičiu vienas kito atžvilgiu judantys stebė-tojai. Lorentzo stūmis tada yra tiesiog peršokimas nuo vienos koordinačių siste-mos prie kitos, t. y. stebėtojai juda kaip judėję, tik aprašydami stebimus įvykiuspakeičiame vieno stebėtojo atskaitos sistemą kita. Būtent pasyvi Lorentzo trans-formacija padės mums išsiaiškinti sukimų laiko ir erdvės plokštumose ypatumusir suprasti stovinčio bei judančio stebėtojo stebinių sąryšius.
3Jei nereikalautume ortochroniškumo x · x′ > 0, transformacija galėtų vektoriaus galą nuovienos hiperbolės perkelti prie kitos. Tai atitiktų arba laiko apgrąžą (viršutinė/apatinė kreivės),arba erdvės atspindį (kairė/dešinė kreivės). Lengva suprasti, kad kombinuodami laiko apgrąžą(yra/nėra) su erdvės atspindžiu (yra/nėra) gautume keturių tipų Lorentzo transformacijas. Čia nag-rinėjame tik (nėra/nėra) atvejį.

216 9 skyrius
Geometrinėje algebroje visus sukimus, nesvarbu, kokia erdvės dimensija arjos signatūra, aprašo ta pati sukimų formulė (4.102). Nuo erdvės signatūros pri-klauso tik rotoriuje esančių bivektorių savybės, o nuo erdvės dimensijos — šiųbivektorių skaičius. Todėl reliatyvistinėsCl1,1 algebros atveju Euklido erdvės bi-vektorių e12 tereikia pakeisti erdvės-laiko plokštumos bivektoriumi γ10 ≡ γ1γ0.Pačius rotorius, kaip minėjome, skaičiavimams patogiau užrašyti hiperbolinė-mis funkcijomis (9.8). Tolesniems pertvarkymams mums dar prireiks dvigubokampo hiperbolinių funkcijų formulių. Jas nesunku išvesti pasinaudojus tapatybeeαγ10eβγ10 = e(α+β)γ10 , kurioje eksponentines išreiškę per hiperbolines funkci-jas randameÄ
chα + γ10 shαäÄchβ + γ10 sh β
ä=Ächα ch β + shα sh β
ä
+ γ10Äshα ch β + chα shβ
ä= ch(α+ β) + γ10 sh(α+ β).
(9.22)
Sulyginę narius prie skaliaro ir bivektoriaus ir paėmę α = β = ϕ/2 iš kartogauname reikalingas formules:
ch2ϕ
2+ sh2
ϕ
2= chϕ, 2 sh
ϕ
2chϕ
2= shϕ. (9.23)
Pasinaudoję tapatybe eαγ10e−αγ10 = 1, lygiai tokiu pačiu būdu gaunameÄchα + γ10 shα
äÄchα− γ10 shα
ä= ch2 α − sh2 α = 1 , (9.24)
kuri yra trigonometrinės formulės sin2 α+ cos2 α = 1 analogas.Dabar jau nesunku apskaičiuoti, kaip pasisuka laiko ašies bazinis vektorius
γ0 jį sukant γ10 bivektoriaus plokštumoje su pusės kampo rotoriumi e−ϕγ10/2,
eϕγ10/2γ0e−ϕγ10/2 =
Ächϕ
2+ γ10 sh
ϕ
2
äγ0Ächϕ
2− γ10 sh
ϕ
2
ä
=Äch2
ϕ
2+ sh2
ϕ
2
äγ0 + 2γ1 sh
ϕ
2chϕ
2=γ0 chϕ+ γ1 shϕ .
(9.25)
Lygiai taip pat paprasta surasti ir erdvinio vektoriaus γ1 transformacijos formulę
eϕγ10/2γ1e−ϕγ10/2 = γ1 chϕ+ γ0 shϕ . (9.26)
9.5 pavyzdys. Laikiškąjį bivektorių γ10 pasukime jo paties plokštumoje.
eϕγ10/2γ10e−ϕγ10/2 = eϕγ10/2γ1e
−ϕγ10/2eϕγ10/2γ0e−ϕγ10/2
= (γ0 shϕ+ γ1 chϕ)(γ0 chϕ+ γ1 shϕ)
= γ1γ0(ch2 ϕ− sh2 ϕ) + (− chϕ shϕ+ shϕ chϕ)
= γ10 .
(9.27)
Kaip ir turi būti, bivektorių sukant jo paties plokštumoje, jis nesikeičia.

Cl1,3 algebra ir reliatyvumo teorija 217
9.3.2. Sukimai visame Minkowskio erdvėlaikyje ir invariantinis skaidi-nys. Aptarkime bendrą sukimą keturmatėje erdvėje. Nors sukimas visada vykstaplokštumoje, tačiau dabar plokštumą nusakys laisvai paimtas bivektorius B, ne-būtinai sutampantis su viena iš bazinių bivektorinių plokštumų. Kitaip tariant,tegu eksponentėje stovi laikiškųjų ir erdviškųjų bivektorių tiesinė kombinacija.Tokių transformacijų visuma Minkowskio erdvėlaikyje vadinama Lorentzo gru-pe. Lorentzo grupės struktūros išsamiai nenagrinėsime, tik pastebėsim, kad šiosgrupės erdviniai sukimai sudaro atskirą pogrupį, o stūmiai tokio pogrupio nesu-daro. Tai matyti iš to, kad dviejų stūmių nelygiagrečiose plokštumosekombinaci-ja yra stūmis + erdvinis sukimas. Jei abu stūmiai vyksta toje pačioje plokštumoje,erdvinio posūkio neatsiranda, nes tos pačios plokštumos stūmio bivektoriai ko-mutuoja.
9.6 pavyzdys. Patikrinkite, kad trys erdviškieji bivektoriai tenkina komutacinį sąryšį
− 12
(Iσ1Iσ2 − Iσ2Iσ1
)= Iσ3 . (9.28)
Indeksus cikliškai sukeitę vietomis gausime dar du komutacinius sąryšius, analogiškusPaulio matricų komutatoriams. Tokį bivektorių komutatorių galima traktuoti kaip dvie-jų grupės elementų daugybos operaciją. Ši grupė nusako visus galimus erdviškuosiussukimus ir sudaro taip vadinamą SO(3) Lie grupę. Visų šešių bivektorių komutatoriaisudaro didesnę grupę SO(3,1). Šios grupės generatoriai yra visi šeši bivektoriai. Trivek-torių ir bivektorių komutatoriai sudaro dar didesnę SO(4,1) grupę, turinčią 10 elementų(generatorių). Visos šios grupės yra smulkiai išnagrinėtos knygoje [43]. Grupių SO(3),SO(3,1) ir SO(4,1) algebros žymimos simboliais so(3), so(3, 1) ir so(4, 1).
Bendru atveju keturmačio vektoriaus x sukimą, kurį užduoda Lorentzo roto-rius L, aprašo formulė
x′ = LxL, LL = 1 . (9.29)
Kadangi geometrinėje algebroje sukimai nusakomi plokštumoje, eksponentėjestovi pusės posūkio kampo bivektorius B,
L = ±eB/2. (9.30)
Rotorius su minuso ženklu naudojamas retai. Taip yra todėl, kad į sukimo formu-lę rotorius L įeina kartu su apgręžtu rotoriumi L, todėl nuo ženklo pasirinkimopasukto fizikinio dydžio išraiška nepriklauso. Ką galima dar pasakyti apie šį ro-torių? Visų pirma, jo eksponentėje stovintis bivektorius, kai minėjome, jau nėrapaprasta normuota mentė. Todėl pirmiausia rotorių išmoksime sunormuoti. Taipadaryti bus nesunku, jei pastebėsime, kad Cl1,3 algebroje bivektorių keldamikvadratu visada gauname tik skaliaro ir pseudoskaliaro sumą (bivektoriai nepa-sirodo).

218 9 skyrius
9.7 pavyzdys. Parodysim, kad Cl1,3 algebroje bivektoriaus kvadratas yra skaliaro irpseudoskaliaro suma, B2 = 〈B2〉0 + 〈B2〉4. Tuo tikslu užrašykime bendro pavidalobivektorių
B = a1σ1 + a2σ2 + a3σ3 + b1Iσ1 + b2Iσ2 + b3Iσ3 (9.31)
ir padauginkime jį iš savęs. Pastebime, kad dauginant pasirodo tokie nariai:
1) σ2i ir Iσ2
i , kurie yra skaliarai 〈B2〉0,2) σiIσi = Iσiσi. Tai pseudoskaliarai 〈B2〉4.3) Likusieji nariai duoda bivektorius, kurie ateina poromis su priešingais žen-
klais, būtent σiσj = γiγj ir σjσi = −γiγj , kai i 6= j. Šių porų suma visadayra nulis, todėl 〈B2〉2 = 0.
Todėl galime rašyti B2 = 〈B2〉0+ 〈B2〉4. Kitaip tariant, tokio pavidalo sumącharakterizuoja tik du realūs parametrai ρ ir β, kuriais galėtume laikyti koefici-entus prie skirtingo rango narių. Tačiau yra patogiau abu koeficientus sujungtiį vieną eksponentinį daugiklį B2 = ρeIβ = skaliaras + pseudoskaliaras. Tokiuatveju iš jo ištraukę šaknį ir padalinę (laikome, kad ρ 6= 0), galime bet kokį bi-vektorių sunormuoti į vienetą, kaip to reikalauja transformacijos |L| = 1 sąlyga,
B =Äρ−1/2e−Iβ/2
äB . (9.32)
Kadangi vienetinis bivektorius tenkina B2 = 1 ir kadangi pseudoskaliaras I ko-mutuoja su bivektoriais, apskaičiavę B kvadratą gauname B2 = ρ−1e−IβB2 = 1.Kvadratas yra teigiamas, B2 > 0, todėl B galime užrašyti kaip laikiškųjų bivek-torių sumą B = a1σ1+a2σ2+a3σ3. Tada iš (9.32) ir (9.31) išplaukia skaidinys
B = ρ1/2eIβ/2B = aB + bIB , (9.33)
kura ir b yra realūs dydžiai. Formulė (9.33) sako, kad bet kokį bivektorių, t. y. betkokią plokštumą erdvėlaikyje, galima užrašyti kaip laikiškojo B ir erdviškojo IBbivektorių sumą, kurioje B yra tas pats bivektorius (ortochroniškumo sąlyga).Kadangi B ir IB komutuoja ir B(IB) = (IB)B = I , apibendrintą Lorentzorotorių galim išreikšti eksponenčių sandauga
L = eαB/2eθIB/2 = eθIB/2eαB/2 . LORENTZO ROTORIUS (9.34)
Daugiklis su B generuoja stūmį, o IB — įprastą sukimą trimatėje erdvėje. Taigi,(9.34) formulė teigia, kad bet koks erdvėlaikio rotorius faktorizuojasi į daugik-lius, vienas iš kurių yra stūmis (transformacija veikia laiko ašį γ0), o kitas reiškiaposūkį erdvėje. Kadangi abu daugikliai komutuoja, rezultatas nepriklauso nuošių transformacijų eiliškumo. Rotorius (9.34) vadinamas invariantiniu skaidiniu.

Cl1,3 algebra ir reliatyvumo teorija 219
a) b)
9.5 pav. a) Vektorių sukimas erdvės plokštumoje Iσ3 = γ2γ1. b) Vektoriųsukimas laiko-erdvės plokštumoje σ3 = γ3γ0. Brūkšniuotos linijos vaizduojaatitinkamai apskritimo lanką ir hiperbolių šakas
Išskleidus eksponentes jį galima užrašyti tokiu kanoniniu pavidalu:
L = RαRθ = eα2Be
θ2IB =
(chα
2+ B sh
α
2
)(cos
θ
2+ IB sin
θ
2
), (9.35)
kur B yra bet koks normuotas laikiškasis bivektorius B2 = (a1σ1 + a2σ2 +a3σ3)
2 = 1. Erdvėlaikio sujungtinumo transformacija (apgrąža + trimatės erd-
vės atspindys) jo ženklo nepakeičia,≃B = B, todėl
≃Rα = Rα. Pastaroji savybė
yra skiriamasis stūmio rotoriaus požymis.Bivektorius IB yra erdviškųjųbivektorių suma, IB = b1Iσ1+b2Iσ2+b3Iσ3,
kuri tenkina sąlygą (IB)2 = −1. Jis generuoja trigonometrines funkcijas ir at-lieka posūkį trimatės erdvės plokštumoje IB kampu α. Rotoriaus Rθ orientaciją
erdvėlaikio sujungtinumas pakeičia į priešingą,≃Rθ = Rθ .
Iš (9.35) formulės matyti, kad stūmio rotorių paėmę artimą vienetui eα2B ≈ 1,
gauname nereliatyvistinę transformaciją. Tuomet sukimas laiko-erdvės plokštu-moje virsta vienetine transformacija ir lieka tik įprasti erdviniai sukimai. Tai-gi, Lorentzo transformacija Cliffordo Cl1,3 algebroje natūraliai pereina į trimatėsCl3,0 erdvės sukimus.
9.5a pav. pavaizduotas bazinių vektorių sukimas rotoriumi R = eIσ3θ/2.Pasukus erdviniai baziniai vektoriai γ1 ir γ2 pereina į naujus vektorius,
γ ′1 = Rγ1R = γ1 cos θ − γ2 sin θ ,
γ ′2 = Rγ2R = γ2 cos θ + γ1 sin θ .(9.36)
Kaip matome, tai yra mums įprastas sukimas trimatėje Euklido erdvėje.

220 9 skyrius
9.5b pav. iliustruoja laikiškąjį sukimą rotoriumi R = eσ3α/2, pervedantįbazinius vektorius γ0 ir γ3 į naujus vektorius γ ′0 ir γ ′3,
γ ′0 = Rγ0R = γ0 chα+ γ3 shα ,
γ ′3 = Rγ3R = γ3 chα+ γ0 shα .(9.37)
Iš 9.2 pav. matome, kad posūkio kampui α artėjant į +∞ turime shα ≈ chα, oartėjant į −∞ ženklai tampa priešingais, shα ≈ − chα. Tai reiškia, kad posū-kio kampui didėjant vektorius γ ′0 artėja prie šviesos kūgio iš vienos arba iš kitospusės, tačiau niekada jo nepasiekia. Todėl darome išvadą, kad masyvios dalelėstrajektorija visada pasilieka kūgio viduje. Aišku, bendru atveju, kai rotorius vie-nu metu yra ir erdviškasis ir laikiškais, gausime trigonometrinių ir hiperboliniųfunkcijų mišinį. Atkreipkit dėmesį, kad 9.5 pav. bei jį aprašančiose formulėsenaudojame tą patį bivektorių B = σ3, kas dera su (9.34) formule.
9.8 pavyzdys. Parodysime, kad transformacijos (9.36) ir (9.37) nepakeičia intervalodydžio. Tuo tikslu pakanka įsitikinti, kad transformuotų bazinių vektorių kvadratai ne-pasikeičia. Iš tiesų, jei γ21 = γ22 = γ23 = −1 ir γ20 = 1, tai apskaičiavę jų kvadratus(γ′µ)
2 po (9.36) pasukimo gauname
(γ′1)2 = (γ1 cos θ− γ2 sin θ)
2 = − cos2 θ − sin2 θ = −1,
(γ′2)2 = (γ1 cos θ+ γ2 sin θ)
2 = − cos2 θ − sin2 θ = −1.(9.38)
Panašiai iš (9.37) turime
(γ′0)2 = (γ0 chα+ γ3 sh α)
2 = ch2 α− sh2 α = 1,
(γ′3)2 = (γ0 shα+ γ3 ch α)
2 = − ch2 α+ sh2 α = −1.(9.39)
Tiesa, pažvelgę į 9.5b pav. matome, kad pasuktas vektorius vaizduojamas kaip ilgesnis.Deja, tai kaina, kurią mokame už mėginimą Minkowskio plokštumą pavaizduoti Euklidoplokštumoje.
Lorentzo rotoriai tenkina savybę LL = LL = 1, todėl dviejų keturmačiųvektorių sandaugai ab galim rašyti
(ab)′ = L(ab)L= LaLLbL = a′b′. (9.40)
Lengva įsitikinti, kad ši savybė išlieka teisinga ir multivektoriams. Tai reiškia,kad Lorentzo transfomacija išsaugo geometrinę sandaugą.
9.3.3. Rotoriaus konstravimas žinant du vektorius. Bet kokį bivektoriųvisada galime įsivaizduoti kaip dviejų nelygiagrečių vektorių išorinę sandaugą.Tiesa, toks vaizdinys nėra vienareikšmis, nes egzistuoja be galo daug vektoriųporų, kurios visos guli bivektoriaus plokštumoje. 9.6 poskyryje mums prireiks

Cl1,3 algebra ir reliatyvumo teorija 221
per tokių vektorių porą išreikštos rotoriaus formulės. Išveskime ją dabar. Nagri-nėkime atvejį, kai x2 > 0, t. y. kai abu vektoriai yra šviesos kūgio viduje ir todėlgali būti susieti priežastingumo ryšiu. Panašų rotoriaus radimo uždavinį Cl3,0algebrai esame išsprendę 4 skyriuje.
Paimkime keturmatį vektorių u. Laikykime, kad jis normuotas į vienetą,u2 = 1. Mūsų tikslas surasti rotorių L, kuris u pervestų į v, t. y.
v = LuL, u2 = v2 = 1 . (9.41)
Ieškosime optimaliausio rotoriaus, kuris neturėtų jokių kitų sukimo transforma-cijų daugiklių. Akivaizdu, kad tokio rotoriaus sukimo plokštuma turi sutapti suv∧u, nes priešingu atveju statmenų šiai plokštumai vekoriaus sandų toks rotoriusnetransformuotų, t. y. turėtume Lu⊥L = u⊥. Pasinaudoję vektorių normavimosąlyga uu = 1 ir savybe u(u ∧ v) = (uuv − uvu)/2 = (vuu − uvu)/2 =
(v ∧ u)u = −(u ∧ v)u matome, kad uL = Lu. Iš tiesų,
uL = ue−θu∧v = u ch θ − u(u ∧ v) sh θ= ch θ u+ (u ∧ v)u sh θ = eθu∧vu = Lu ,
(9.42)
kur θ yra bet koks skaliaras. Todėl (9.41) transformacijoje rotorius galime sukeltiį vieną pusę, v = L2u. Padauginę iš dešinės iš u gauname ieškomo rotoriauskvadrato išraišką
L2 = vu , (9.43)
iš kurios ištraukę šaknį randame rotorių
L =√vu =
(1 + vu)√vu»
1 + 2vu+ (vu)2=
(1 + vu)√vu»
(uv + 2+ vu)vu=
1 + vu»2(1 + v · u)
,
(9.44)
kur pasinaudojom savybe (1 + vu)2 = 1 + 2vu + (vu)2. Tai ta pati (4.123) iš-raiška, kuri nusako atspindį tarp dviejų plokštumų.
9.4. Ką matuoja skirtingų inercinių koordinačių sistemų stebėtojai?
Iki šiol nagrinėjom Cl1,3 algebros formaliąją pusę, kurios svarbiausia dalisbuvo bazinių vektorių posūkiai keturmačiame erdvėlaikyje. Matėme, kad erd-vėlaikio sukimas nepakeičia vektorių kvadrato, todėl pastarasis yra šių transfor-macijų invariantas. Erdvėlaikį stebėtojo atžvilgiu suskirstėme į dvi sritis, kuriasskiria nulinių vektorių kūgis ir kurio paviršiuje guli visos šviesos trajektorijos.Vidinėje kūgio dalyje esančius įvykius su kūgio pradžioje stovinčiu stebėtoju ga-li sieti priežastingumo ryšys, o esančius kitapus kūgio — ne. Šiame skyriujeišsiaiškinsime, kaip sukimo transformacija susijusi su stebėtojo judėjimo greičiu.

222 9 skyrius
9.6 pav. Dalelės pasauli-nės linijos x(τ ) natūralus pa-rametras yra savasis laikas τ .Jos liestinis vektorius v(τ ) =dx(τ )/dτ vadinamas savuojugreičiu. Jei koordinačių ašį γ0pasuksime taip, kad γ0 pasi-darytų lygiagretus v(τ ), tadasavajam greičiui galėsime su-teikti vertę v(τ ) = cγ0
9.4.1. Savasis laikas ir savasis greitis. Aki-mirkai įsivaizduokime, kad egzistuoja išorinis ste-bėtojas, — toks, kuris vienu metu gali regėti ne tikįprastą trijų dimensijų erdvę, bet tuo pačiu metuir praeitį bei ateitį. Jei šio stebėtojo koordinačiųsistemoje dalelė nejuda, tai bėgant laikui keisis tikjos laiko koordinatė. Todėl dalelės trajektoriją erd-vėlaikyje (pasaulinę liniją) šis išorinis stebėtojasmatys kaip vertikalią, laiko ašies kryptimi γ0 nu-kreiptą tiesę. Kai dalelė pradės greitėti arba lėtėti,pasaulinės linijos polinkis ims keistis, kaip pavaiz-duota 9.6 pav., kur laiko ir koordinačių ašys atitin-ka nejudančio išorinio stebėtojo sistemą. Polin-kį γ0 ašies atžvilgiu nusako pasaulinei linijai x(τ)liestinis vektorius. Žinoma, paprastas stebėtojasnegali vienu metu matyti skirtingų laiko momen-tų. Jis visą laiką gyvena „dabartyje“, kitaip pasa-kius, juda išilgai savo pasaulinės linijos. Tačiauašių krypties prasmė nuo to nepasikeičia. Todėlašių pasirinkimas erdvėlaikyje tuo pačiu yra ir ste-bėtojo koordinačių sistemos uždavimas.
Norėdami apskaičiuoti pasaulinei linijai liestinį vektorių turime susitarti dėlpasaulinės linijos parametrizacijos. Kaip jau esame aptarę 6 skyriuje, teorinėsekonstrukcijosekreivę patogiausianusakyti natūraliu parametru τ , kuriuo tarnaujakreivės ilgis. Žinoma, šviesos trajektorijoms (nuliniams vektoriams) tai netiktų,tačiau dabar nagrinėsime tik masyvias daleles ir masę turinčius stebėtojus. Taigi,kai dalelė stovi, jos parametrizuota pasaulinė linija yra x = ctγ0, kurią atitinkaintervalas x2 = c2t2. Akivaizdu, kad natūralus kreivės parametras šiuo atve-ju ir yra τ = ct, kuris vadinamas savuoju dalelės laiku4. Jei pasaulinė linijayra palinkusi (dalelė juda stovinčio stebėtojo atžvilgiu), tada nukreipę γ0 išilgaišios linijos galėsim galvoti, kad ant jos esantis stebėtojas jau yra ramybės būse-noje. Todėl tiek „stovinčiam“, tiek ir „judančiam“ stebėtojui parametro prasmėyra nejudančio stebėtojo laikas, t. y. tas, kurio kryptį rodo γ0. Tokiu būdu ku-ris iš stebėtojų erdvėlaikyje juda, o kuris nejuda yra susitarimo reikalas. Todėlparametras išilgai pasaulinės trajektorijos tuo pačiu užduoda vieno iš stebėtojų,kurį sąlyginai vadinsim „nejudančiu“, laiko ašies kryptį erdvėlaikyje. Dar kartąpabrėšim, kad erdvėlaikis yra izotropiškas (išimtis yra nuliniai vektoriai), todėl
4Terminą „savasis laikas“ įvedė H. Minkowskis 1908 m. Tai laiko intervalas tarp dviejų įvykiųtame pačiame erdvės taške.

Cl1,3 algebra ir reliatyvumo teorija 223
nėra svarbu, kuriai iš erdvėlaikio krypčių priskiriame laiko ašį, nors vaizdumodėlei ji dažniausiai ir nukreipiama vertikaliai.
Apibrėšime judančio stebėtojo keturmatį greitį „išorinio“ stebėtojo atžvilgiu.Keturmačiu greičiu v vadinsime judančio stebėtojo pasaulinės linijos išvestinępagal natūralų parametrą τ (savąjį laiką), kurią žymėsime tašku virš raidės. Taigi,keturmatis greitis, kurio geometrinė prasmė yra pasaulinės linijos liestinė tametaške, yra v =
dx(τ )dτ = x(τ). Stovinčiam vietoje stebėtojui x(τ) = cτγ0, todėl
jam gauname
v0 =dx(τ)
dτ=
d(cτγ0)
dτ= cγ0. (9.45)
Greičio kvadratas tada yra v20 = c2, kurį toliau dažnai prilyginsime vienetui, lai-kydami, kad c = 1. Dar sykį pabrėšim, kad keturmatis greitis yra tik abstrakcija,skirta inerciniam stebėtojui nusakyti. Mokslinėje literatūroje, kalbant apie skir-tingus stebėtojus, žodis „keturmatis“ dažnai praleidžiamas (taip elgsimės ir mes),todėl gali susidaryti klaidingas įspūdis, kad keturmačiai greičiai realūs. Vėliaupamatysime, kad eksperimente matuojamas tik reliatyvus greitis.
Bendro pobūdžio pasaulinę trajektoriją, kurią parametrizuoja monotoniškaiaugantis τ , patogu užrašyti pavidalu
x(τ) = t(τ)γ0 + x1(τ)γ1 + x2(τ)γ2 + x3(τ)γ3 =Ät(τ) + x(τ)
äγ0 , (9.46)
kur x(τ) yra bivektorius,
x(τ) = x1(τ)γ1γ0 + x2(τ)γ2γ0 + x3(τ)γ3γ0
= x1(τ)σ1 + x2(τ)σ2 + x3(τ)σ3 ,(9.47)
kuris, kaip ir laikas t, yra savojo laiko τ funkcija. Pasinaudoję (9.2) mes jį pa-žymėjom paryškintai kaip Cl3,0 algebros vektorių. Išorinio stebėtojo (jo koordi-načių sistemoje nupiešėme pasaulinę liniją) matuojamas laikas t nesutampa susavuoju laiku τ , kuris čia reiškia judančio pasauline linija stebėtojo laiką.
Išdiferencijavę keturmatį vektorių (9.46) pagal τ , gausime keturmatį greitįv(τ) = dx(τ)/dτ , arba
v = x(τ) =(dt(τ)
dτ+
dx(τ)
dτ
)γ0. (9.48)
Keturmačius greičius vadinsime savaisiais greičiais, nes jie yra pasaulinių trajek-torijų, parametrizuotų natūraliu parametru τ , liestiniai vektoriai. Savųjų greičiųkvadratas visada yra vienetas, v2 = v20 = γ20 = 1, nes kiekvienas toks keturma-tis vektorius gali būti gautas pasukus stovinčios dalelės γ0 vektorių, o sukimasnepakeičia keturmačio vektoriaus kvadrato. Tai reiškia, kad visas inercines sis-temas galima pavaizduoti taškais ant trimatės „sferos“, patalpintos keturmatėje

224 9 skyrius
erdvėje5. Visi taškai ant tokios „sferos“ yra lygiaverčiai, todėl ir visos inercinėssistemos yra ekvivalentiškos. Taigi, apibendrinus galima padaryti tokią išvadą:jei norime „pasigaminti“ dvi inercines sistemas arba stebėtojus, reikia paimti duketurmačius vektorius u ir v ant savųjų greičių „sferos“. Pasirinkę u = γ0 saky-sime, kad būtent šio stebėtojo laikas yra savasis. Jis reiškia „nejudantį“ stebėtoją,o kitas stebėtojas v juda. Nejudantis stebėtojas ypatingas tuo, kad jo laiką gali-ma vienareikšmiškai išmatuoti, nes laikrodis, kuris rodo savajį laiką τ , yra antjo rankos. Jo laikrodžio rodmenys nepriklauso nuo to, ar jūs stovite šalia jo, arlekiate kosminiu greičiu. Į klausimą, kuris iš inercinių stebėtojų yra nejudantis,būtų galima atsakyti taip: tas, pas kurį yra laikrodis. Kaip tuoj pamatysime, kitų(judančių) stebėtojų išmatuotą laiką galima išreikšti per nejudančio stebėtojo lai-ką. Tačiau kuriam iš stebėtojų priklauso savasis laikrodis, arba, tiksliau, kurį išstebėtojų laikysime nejudančiu, yra pasirinkimo reikalas. Matematiškai pasirin-kimą realizuojame bazinį vektorių γ0 nukreipę į pasirinktą tašką (stebėtoją) antsavųjų greičių trimatės „sferos“. (9.48) formulėje tai atitinka pasirinkimą t = τir x = const.
Kaip vieną stebėtoją pakeisti kitu? Tarkime, norime iš stovinčio keturmačiostebėtojo γ0 sistemos patekti į kito inercinio stebėtojo, kuris juda pastoviu greičiuv išilgai γ ′0 ašies, sistemą. Kadangi keturmačio greičio kryptis visada sutampa sustebėtojo koordinačių sistemos laikinio bazinio vektoriaus kryptimi, tai pasukę jįkampu α su stūmio transformacija
v(α) = γ ′0 = eαγ1γ0/2γ0e−αγ1γ0/2 = γ0 chα+ γ1 shα (9.49)
gauname, kad judančio stebėtojo koordinačių sistemoje prie γ0 atsiranda koefi-cientas chα. Palyginę (9.49) su (9.48) matome, kad šis koeficientas yra ne kaskita, kaip išvestinė dt(τ )
dτ . Ją nesunku apskaičiuoti iš stovinčio ir judančio stebė-tojų intervalų invariantiškumo sąlygos (dτ)2 = (dt)2 − (dx)2. Ištraukę šaknįturime
dτ = dt√1− v2 , (9.50)
kur pasinaudojome apibrėžimu, kad reliatyvus greitis yra koordinatės išvestinėv = dx
dt . Plačiau jį aptarsime kitame poskyryje. Vadinasi,
chα =dt
dτ=
1√1− v2
. (9.51)
Šis koeficientas ir yra eksperimente matuojamas laikas, kurį matuoja γ0 ašiessavininkas. Kadangi hiperbolinis kosinusas, priešingai negu paprastas, gali būti
5Žodį „sfera“ rašome kabutėse, nes sąlyga v2 = 1 dar nereiškia, kad maišytos signatūroserdvėje ji apibrėžia objektą, panašų į sferą. Palyginkite 9.5a ir 9.5b paveikslus.

Cl1,3 algebra ir reliatyvumo teorija 225
tik didesnis arba lygus vienetui (žr. 9.2 pav.), tai stebėtojas, kuris stebi pasaulinekreive γ ′0 judančią sistemą, išmatuoja chα kartų ilgesnį laiko tarpą nei toje siste-moje einantis laikrodis (laikome, kad momentu τ = 0 abu stebėtojai prasilenkėtame pačiame erdvėlaikio taške).
Jei nejudančiu laikytume antrąjį stebėtoją, tuomet Lorentzo sukimas vyktų įpriešingą pusę,
e−αγ1γ0/2γ0eαγ1γ0/2 = γ0 chα − γ1 shα. (9.52)
Akivaizdu, kad abiem atvejais laiko intervalas yra trumpiausias (chα=1) neju-dančio stebėtojo sistemoje. Judančioje stebėtojo γ0 atžvilgiu sistemoje jis pail-gėja chα kartų. Kaip netrukus įsitikinsime (žr. (9.63) formulę), koeficientas shαatspindi abiejų stebėtojų reliatyvių (tarpusavio) greičių skirtumą. Tokį spėjimąpatvirtina ir priešingi ženklai prie šio koeficiento (9.49) ir (9.52) formulėse.
Diferencijuojant savąjį greitį pagal savąjį laiką, v = dv/dτ , galima apibrėžtiketurmatį pagreitį. Inercinės sistemos stebėtojui, pagal apibrėžimą, jis lygus nu-liui, v = 0. Išdiferencijavę greičio kvadratą v2 = vv = v · v = 1 randame, kadsavasis greitis ir savasis pagreitis yra vienas kitam statmeni,
dv2
dτ=
d(v · v)dτ
= v · v + v · v = 2v · v = 0 . (9.53)
Tai leidžia apibrėžti bivektorių v ∧ v = vv.
9.4.2. Reliatyvusgreitis. Paimkime dvi viena kitos atžvilgiu judančias iner-cines sistemas, kurių savieji greičiai yra u ir v. Paprastumo dėlei laikykime, kadu = γ0, o stebėtojo v trajektoriją parametrizuoja (9.46) formulė. Nors keturma-čių greičių betarpiškai matuoti negalime, tačiau galime išmatuoti greitį, kuriuovienas stebėtojas juda kito atžvilgiu. Šis greitis vadinamas santykiniu (reliatyviu)greičiu v ir, kaip jau minėjome, apibrėžiamas formule
v =dx
dt. (9.54)
Norėdami surasti v išraišką, sudauginkime abiejų stebėtojų savuosius greičius vir γ0,
vγ0 =d
dτ
Äx(τ)γ0
ä=
d
dτ
Ät+ x
ä, (9.55)
kur t+x žymi įvykį kito stebėtojo koordinačių sistemoje. Kadangi vγ0 yra dviejųvektorių geometrinė sandauga, joje išskirkime skaliarinę ir bivektorinę dalis:
dt
dτ= v · γ0, ir
dx
dτ= v ∧ γ0 . (9.56)

226 9 skyrius
Vadinasi, reliatyvus greitis v, kurį matuoja mūsų stebėtojas, yra
v =dx
dt=
dx
dτ
dτ
dt=v ∧ γ0v · γ0
. (9.57)
Jei stebėtojus v ir γ0 sukeistume vietomis, išraiškos (9.57) ženklas, kaip ir turibūti, pasikeistų į priešingą. Kadangi tie patys vektoriai stovi ir skaitiklyje, irvardiklyje, tai net ir pakeitus kreivių parametrizaciją rezultatas nepasikeis. Todėlreliatyvus greitis nuo trajektorijos parametrizacijos nepriklauso.
Jei stebėtojas u irgi judėtų, lygiai taip pat skaičiuodami išvestume bendresnęformulę, kurioje γ0 tektų pakeisti į u:
v =v ∧ uv · u . RELIATYVUS GREITIS (9.58)
Taigi, reliatyvaus greičio formulė geometrinėje algebra turi labai gražų ir si-metrišką pavidalą. Nors (9.58) išraiška nepriklauso nuo pasirinktos koordinačiųsistemos, tačiau sprendžiant konkrečius uždavinius dažniausiai patogiau naudotismažiau bendra (9.57) formule, kurioje laikoma, kad vienas iš stebėtojų nejuda.
Iš formulių vu = v · u + v ∧ u ir uv = v · u − v ∧ u išreiškę v ∧ u beiprisiminę, kad u2 = v2 = 1, ir apskaičiavę reliatyvaus greičio kvadratą gauname
v2 =(v ∧ u)2(v · u)2 = 1− 1
(v · u)2 < 1 . (9.59)
Kadangi atimame visada teigiamą dydį, tai reliatyvus greitis niekada negali pa-siekti ar viršyti šviesos greičio. Kai du stebėtojai vienas kito atžvilgiu nejuda,v = 0, iš (9.59) formulės išplaukia, kad v · u = 1. Kitaip tariant, abu ketur-mačiai greičiai rodo į tą patį savųjų greičių „sferos“ tašką. Jei stebėtojų greičiųskirtumas artimas šviesos greičiui (c = 1), tada v2 → 1 ir v · u→ ∞, nors abie-jų greičių norma u2 = v2 = 1 nepasikeičia. Tai reiškia, kad pasukto vektoriausprojekcija į pirminio greičio vektoriausu kryptį turi labai padidėti (žr. 9.5b pav.).
9.9 pavyzdys. Parodysime, kad skaliarinė sandauga yra v · u = chα, kur α žymistūmio kampą. Paimkime u = γ0. Tada v apskaičiuojame iš posūkio transformacijos:
v = eασi/2γ0e−ασi/2 =
(chα
2+ σi sh
α
2
)γ0
(chα
2− σi sh
α
2
)
=(ch2
α
2+ sh2 α
2
)γ0 + 2 sh
α
2chα
2γi = chα γ0 + shαγi ,
(9.60)
kur pasinaudojome formulėmis σiγ0 = −γ0σi = γi ir σiγ0σi = −γ0. Padauginęvidine sandauga iš γ0 randame savųjų greičių sandaugos išraišką
v · u = v · γ0 = chα . (9.61)
Iš jos matyti (žr. 9.2 pav.), kad stūmio kampui didėjant, vidinė sandauga neribotai auga.
Cl1,3 algebra ir reliatyvumo teorija 227
Grįžkime prie reliatyvausgreičio formulės (9.58). Jos vardiklįv·u galima už-rašyti panaudojant knygose apie reliatyvumo teoriją dažnai sutinkamą Lorentzodaugiklį γ , kuris, kaip rodo (9.51) formulė, yra ne kas kita, kaip posūkio kampohiperbolinis kosinusas
γ = v · u = chα =1»
1− (v/c)2. (9.62)
Šį kartą išraiškoje išreikštai įrašėme šviesos greitį c, kad skaitytojuibūtų lengviaupalyginti ją su vadovėliuose pateikiamu pavidalu. Kadangi ch2 α− sh2 α = 1, iš(9.62) gauname dar vieną svarbią formulę, kuri stūmio kampą susieja su reliaty-viu greičiu:
shα =|v|cγ. (9.63)
Panašiu būdu apskaičiuojame ir (9.58) skaitiklyje esančią išorinę sandaugą,
v ∧ u =Ächαγ0 + shα γi
ä∧ γ0 = γiγ0 shα = σi shα . (9.64)
Į reliatyvaus greičio apibrėžimą (9.58) įstatę (9.61) ir (9.64) išraiškas matome,kad reliatyvus greitis yra proporcingas stūmio kampo hiperboliniam tangentuivi = σi thα. Formulę nesunku apibendrinti bazinį laikiškąjį bivektorių σi =u∧γ0 pakeitus bendro pavidalodviejų judančių stebėtojųbivektoriumiσ = u∧v,
v = σ thα . RELIATYVUS GREITIS (9.65)
Ši formulė reliatyvų greitį išreiškia per stūmio tarp dviejų keturmačių vektoriųkampą α. Ji svarbi, nes skaičiavimai su kampais α yra daug patogesni negu sutiesiogiai matuojamais reliatyviais greičiais v. Pavyzdžiui, akivaizdu, kad tojepačioje σ plokštumoje vienas po kito atlikus du laikiškuosius sukimus kampaisα ir β, bendras posūkio kampas bus paprasčiausia jų suma α + β. Tuo tarpureliatyvių greičių sudėties formulė, kaip rodo žemiau pateikiamas pavyzdys, yragana sudėtinga.
9.10 pavyzdys. Išvesime reliatyvių greičių sudėties formulę, laikydami, kad nejudan-čio stebėtojo atžvilgiu kiti du stebėtojai, a ir b, γ1 ašies kryptimi juda į priešingas puses.Paimkime u = γ0, ir pasinaudoję (9.60) formule aprašykime du inercinius stebėtojus,kurių keturmačiai greičiai va ir vb:
va = γ0 ch αa + γ1 shαa , vb = γ0 chαb − γ1 sh αb . (9.66)
Tada pagal (9.58) formulę judantys stebėtojai išmatuos tokį vienas kito reliatyvų greitį:
vab =va ∧ vbva · vb
= th(αa + αb)σ1 =sh(αa + αb)
ch(αa + αb)σ1
=sh αa ch αb + chαa sh αb
ch αa ch αb + shαa sh αbσ1 =
thαa + thαb
1 + thαa thαbσ1 .
(9.67)

228 9 skyrius
Išvesdami šį sąryšį pasinaudojome hiperbolinių sinusų ir kosinusų kampų sumos formu-le (9.22). Prisiminę, kad |v| = th α, gauname
|vab| =|va|+ |vb|
1 + |va|vb|/c2. (9.68)
Vėlgi, norėdami kad formulė niekuo nesiskirtų nuo pateikiamų vadovėliuose, į ją įrašėmeir šviesos greitį c. Taigi, sudėtinga kolinearių reliatyvių greičių sudėties formulė yra nekas kita, kaip paprasčiausia hiperbolinio tangento kampų sumos formulė.
Lygiai taip pat nesunku išvesti ir dar vieno gerai žinomo reiškinio, būtentDoplerio reiškinio, formulę.
9.11 pavyzdys. Visi gerai žinom, kad artėjančio (tolstančio) traukinio švilpesys pa-aukštėja (pažemėja). Tai Dopplerio reiškinys, kuris taip pat stebimas ir su šviesa. Šviesosdažnis yra apibrėžiamas kaip stebėtojo greičio v ir keturmačio bangos vektoriaus vidinėsandauga ω = k · v (žr. 9.3 lentelę). Kadangi intervalo tarp bet kurių keturmatės foto-no trajektorijos taškų ilgis yra nulis, tai keturmačio bangos vektoriaus kvadratas taip patlygus nuliui, k2 = ω2 − k2 = 0. Dopplerio dažnio pokytį nusako dažnių santykis
ωa
ωb=k · vak · vb
, (9.69)
kur ωa ir ωb yra dažnis, išmatuotas atitinkamai pirmojo a ir antrojo b inercinio stebėto-jo sistemoje. Laikykime, kad antrasis stebėtojas nejuda, t. y. jo savasis greitis vb = γ0.Tada pirmojo stebėtojo savajį greitį rasime pasukę koordinačių sistemą erdvėlaikyjekam-puα/2 vienoje iš laikiškųjųplokštumų, pavyzdžiui, γ1γ0. Pritaikę (9.25) formulę turime
va = eα
2γ1γ0γ0e
− α
2γ1γ0 = γ0 ch α+ γ1 sh α . (9.70)
Įstatę (9.70) ir vb = γ0 į (9.69), gauname
ωa
ωb=
(k · γ0) chα+ (k · γ1) shαk · γ0
. (9.71)
Šią lygtį galima suprastinti. Pirma, kadangi vb = γ0, tai k · γ0 = ωb. Antra, parodysim,kad ir (k · γ1) = ωb. Ir tikrai, trimačio bangos vektoriaus kvadratas b stebėtojui yrak2b = k2b1+k
2b2+k
2b3. Parinkime tokią bangos vektoriaus kryptį, kad projekcijos tenkintų
sąlygą k2b = k2b1 ir kb2 = kb3 = 0. Kita vertus, keturmatis bangos vektoriusk yra nulinis
vektorius, todėl jam galioja lygybė k2 = ω2b − k2
b = ω2b − k2b1 = 0, iš kurios išplaukia,
kad ωb = kb1. Todėl k · γ1 = k1b = ωb ir (9.71) lygtį galime perrašyti pavidalu
ωa
ωb= ch α+ shα =
1 + th α
1− th α. (9.72)

Cl1,3 algebra ir reliatyvumo teorija 229
Kadangi reliatyvus greitis tarp nejudančio siuntėjo b ir judančio priėmėjo a yra |u| =thα, tai iš jos išplaukia reliatyvistinė Dopplerio formulė šviesos dažnio pokyčiui
ωa
ωb=
1 + |u|1− |u| . (9.73)
Teigiamas greičio |u| ženklas atitinka artėjančius stebėtojus. Kadangi naudojome b ste-bėtojo koordinačių sistemą (nes vb = γ0), dažnį skaičiuojame nuo ωb. Todėl stebėtojas amatys padidėjusį dažnį, ωa > ωb. Kai stebėtojai vienas nuo kito tolsta, |u| ženklas busneigiamas ir tada ωa < ωb. Formulė (9.73) taikoma astronomijoje žvaigždžių greičiamsmatuoti.
9.5. Erdvėlaikio perskėlimas
Labai svarbu suprasti, kaip reliatyvistiniai fizikiniai dydžiai siejasi su savoklasikiniais atitikmenimis. Šį sąryšį geometrinėje algebroje nusako erdvėlaikioperskėlimas. Pavadinimas apeliuoja į tai, kad atlikus minėtą transformaciją Cl1,3algebra perskeliama į dvi dalis, lyginę ir nelyginę. Po perskėlimo lyginės dalieselementus atitinka eksperimentuose matuojami dydžiai. Tai lengva suprasti pri-siminus skyriaus pradžioje aprašytą Cl1,3 algebros struktūrą,¶
1, γµ, σi, I4σi, I4γµ, I4©, (9.74)
kurioje keturmatį pseudoskaliarą I pažymėjome kaip I4. Bivektoriai σi tenkinaantikomutacinius sąryšius
12
Äσjσk + σkσj
ä= 1
2
Äγjγk + γkγj
ä= δjk, (9.75)
kurie sutampa su Cl3,0 algebros, aprašančios klasikinę fiziką, komutaciniais są-ryšiais. Kompaktiškai užrašyta Cl3,0 algebros bazė yra¶
1, σi, I3σi, I3©. (9.76)
Kaip matome, ją sudaro tik lyginiai Cl1,3 algebros elementai σi (nėra γµ). Be to,Cl3,0 algebros pseudoskaliaras I3 sutampa su I4. Iš tikrųjų, I3 = σ1σ2σ3 =γ1γ0γ2γ0γ3γ0 = γ0γ1γ2γ3 = I4. Šis sutapimas labai palengvina skaičiavimusir yra lemiamas faktorius reliatyvumo teorijos aprašymui rinktis Cl1,3, o ne Cl3,1algebrą, kurioje abu pseudoskaliarai jau skiriasi. Toliau abu pseudoskaliarus vėlžymėsime ta pačia raide I . Kurį iš jų turime omenyje, I3 ar I4, suprasime iškonteksto.
Panagrinėkime, kaip keturmačiai reliatyvistiniai dydžiai pereina į trimatėserdvės dydžius. Atidžiai pažvelgę į abiejų geometrinių algebrų bazes (9.74) ir(9.76), o taip pat į 9.2 lentelę, pirmiausia pastebime, kad trys iš šešių keturmačioerdvėlaikio bivektorių trimatėje erdvėje virsta vektoriais, o kiti kaip buvo, taip

230 9 skyrius
ir pasilieka bivektoriais. Tai lengva suprasti. Perėjus į 3D algebrą laikas nustojabūti vektoriumi. Dėl to keturmačių bivektorių Iσi, kurie sudaryti iš erdvinių vek-torių sandaugų, prigimtis nepasikeičia. Tuo tarpu tie bivektoriai, į kuriuos įeinaγ0, natūralu, praranda vieną sandą ir virsta vektoriais. Žinoma, šis reliatyvistiniųdydžių virsmas priklauso nuo erdvėlaikio koordinačių sistemos, nes 3D erdvė irjos Cl3,0 ∼=Cl+1,3 algebra yra „pririštos“ prie konkretaus inercinio stebėtojo.
Erdvėlaikio perskėlimo procedūrą pademonstruosime perskeldami elektro-magnetinį lauką. Kitame skyriuje matysime, kad elektromagnetinio lauko ap-rašymui patogu įvesti elektrinio ir magnetinio laukų sumą, kuri vadinama relia-tyvistiniu Faraday’aus bivektoriumi F . Toks bivektorius turi šešis sandus, t. y.tiek, kiek yra bivektorių Cl1,3 algebroje. Suskaidykim Faraday’aus lauką į trima-tės erdvės elektrinį vektorių ir magnetinį bivektorių. Pasiremsime tuo, kad σi irIσi skirtingai elgiasi, juos apgaubus laikiniu vektoriumi γ0 (žr. (9.11) formulę).Iš tiesų, kadangi
γ0σiγ0 =γ0γiγ0γ0 = γ0γi = −γiγ0 = −σi,
γ0Iσiγ0 =γ0Iγ0γ0σiγ0 = −γ0Iγ0σi = Iσi ,(9.77)
tai tokia transformacija pakeičia σi, bet ne Iσi ženklą. Tai paaiškinama tuo, kadį σi įeina vienas bazinis erdvinis vektorius, o į Iσi, — du. Todėl erdvėlaikiobivektorių F formaliai galime užrašyti kaip lyginės ir nelyginės dalies sumą,
F =1
2
ÄF + γ0Fγ0
ä+
1
2
ÄF − γ0Fγ0
ä. (9.78)
Antrasis narys E ≡ 12
ÄF − γ0Fγ0
äyra elektrinio lauko vektorius, nes ap-
supus γ0, t. y. atlikus trimatės erdvės inversiją, jis kaip ir σi pakeičia ženklą:γ0Eγ0 = 1
2γ0ÄF − γ0Fγ0
äγ0 = 1
2
Äγ0Fγ0 − F
ä= −1
2
ÄF − γ0Fγ0
ä= −E.
Todėl galim rašyti E = E1σ1 + E2σ2 + E3σ3, kur σi jau įsivaizduojam kaiptrimatės erdvės vektoriaus sandus. Kita vertus, žinome, kad trimatėje erdvėjemagnetinis laukas B po erdvinės inversijos ženklo nepakeičia. Būtent taip elgia-si pirmasis (9.78) narys B = 1
2
ÄF + γ0Fγ0
ä. Ir tikrai, apgaubę jį γ0 gauname
γ0Bγ0 = B. Todėl galim rašyti B = IB = 12
ÄF + γ0Fγ0
ä.
9.12 pavyzdys. Įsitikinkite, kad elektrinį ir magnetinį laukus galima iš Faraday’jausbivektoriaus išskirti ir apskaičiavus jo projekciją bei rejekciją (žr. (3.35) ir (3.38) formu-les) į γ0 ašį,
E = F · γ0γ0 , B = F ∧ γ0γ0, (9.79)
kurios atlieka atitinkamai elektrinio ir magnetinio lauko projektoriaus arba filtro vaid-menį.

Cl1,3 algebra ir reliatyvumo teorija 231
Jei bivektorių išskaidėme apgaubę dviem γ0 vektoriais, tai keturmatį vektoriųx = xµγµ = tγ0 + xiγi galima tikėtis perskelti dauginant tik iš vieno γ0,
xγ0 =x · γ0 + x ∧ γ0 = (t0γ0 + xiγi) · γ0 + (t0γ0 + xiγi) ∧ γ0=t0 + xiγiγ0 = t0 + xiσi = t0 + x0 ,
(9.80)
kur t0 interpretuojame kaip savąjį laiką τ . x0 yra bivektorius Cl1,3 algebroje,tačiau jį galima traktuoti ir kaip Cl3,0 algebros vektorių. Panašiai randame, kaddauginant iš kairės pasikeičia tik vektorinės dalies ženklas,
γ0x = t− x0 . (9.81)
Kadangi dešinėje (9.80) ir (9.81) pusėje pasirodė perskeltas keturmatis vektorius,t. y. skaliarinio parametro laiko t ir 3D vektoriaus x0 suma arba skirtumas, jeidauginame iš kitos pusės, tai kairę pusę (geometrinę daugybą iš keturmačio grei-čio v = γ0) galim interpretuoti kaip erdvėlaikio perskėlimo procedūrą. Kitaisžodžiais, daugyba iš keturmačio savojo greičio atskiria erdvę ir laiką taip, kaipjie suprantami klasikinėjeGalilei’aus mechanikoje. Aišku, (9.80) ir (9.81) lygtys,užrašytos Cl1,3 algebroje, matematiniu požiūriu išlieka korektiškos,o erdvėlaikioperskėlimas leidžia suteikti fizikinę prasmę įvairų rangų nariams.
Norėdami tuo įsitikinti atlikime erdvėlaikio perskėlimą (angl. spacetime sp-
lit) invariantiniam intervalui:
x2 = xγ0γ0x = (t0 + x0)(t0 − x0) = t20 − x20. (9.82)
Jei vektorių γ0 Lorentzo transformacija pasuktume link v, invariantas x2 nepa-sikeistų. Kadangi v2 = 1, tai formulė išlieka teisinga ir γ0 pakeitus bet kurioinercinio stebėtojo keturmačiu greičiu,
x2 = xvvx = (t+ x)(t− x) = t2 − x2. (9.83)
Todėl erdvėlaikio perskėlimą galima atlikti ne tik ramybės būsenoje esančiamstebėtojui (jo savasis greitis γ0), bet ir judančiam stebėtojui, kurio savasis grei-tis v. Pavyzdžiui, dar vienas stebėtojas, kurio savasis greitis v′, tą patį invariantąperskels skirtingu būdu,
x2 = xv′v′x = (t′ + x′)(t′ − x′) = (t′)2 − (x′)2. (9.84)
Taigi, kaip ir turi būti, formulės (9.82) ir (9.83) rodo, kad jo išmatuotas laikasir trimatis atstumas skirsis nuo stebėtojų γ0 ir v išmatuotų verčių. Matematiš-kai erdvėlaikio perskėlimą, t. y. daugybą iš γ0, v arba v′, galima traktuoti kaipprojekciją į atitinkamą Cl+1,3 poalgebrį: skaliarinė projekcijos dalis duoda relia-tyvų laiką, o bivektorinė — reliatyvias koordinates (Cl3,0 algebros vektorius).Kadangi įvairių stebėtojų baziniai keturmačiai vektoriai yra pasukti vienas kito

232 9 skyrius
Savasis multivektorius Multivektorius po perskėlimoKoordinatė x xγ0 = t+ x
Greitis v vγ0 = γ(1 + v)Impulsas p pγ0 = E + p
Fotono banginis vektorius k kγ0 = ω + k
Vektorinė išvestinė ∇ ∇γ0 = ∂t −∇
Potencialas A Aγ0 = ϕ+A
Srovė J Jγ0 = ρ− J
Faraday’aus bivektorius F (F · γ0)γ0 = E; (F ∧ γ0)γ0 = BJudesio kiekio momento p ∧ x
Ä(pγ0)(γ0x)− (xγ0)(γ0p)
ä/2
bivektorius = (pt− Ex) + p ∧ x
9.3 lentelė. Reliatyvistinių erdvėlaikio vektorių ir bivektorių perskėlimas ne-judančio stebėtojo koordinačių sistemoje
atžvilgiu, tai ir projekcijos, kurios atitinka vieną ir tą patį fizikinį objektą, saky-sim, pasaulinę trajektoriją, skiriasi (žr. 9.5 pav.).
Reliatyvistinių fizikinių dydžių perskėlimą apibendrina 9.3 lentelė, kuriojesurinktos dažnai sutinkamų mechaninių ir elektrodinaminių dydžių perskėlimoišraiškos nejudančio stebėtojo γ0 koordinačių sistemoje.
Iš lentelės matyti, kad γ0 stebėtojui keturmatis impulsas p skyla tokiu būdu:
pγ0 = p · γ0 + p ∧ γ0 = E + p, (9.85)
kur E ir p yra to stebėtojo matuojama dalelės energija bei judesio kiekio vek-torius. Išskaidymą (9.85) taip pat galima laikyti keturmačio energijos-impulsoapibrėžimu. Iš tiesų, apskaičiavę jo kvadratą gauname reliatyvumo teorijoje ge-rai žinomą sąryšį
p2 = (pγ0)(γ0p) = (pv)(vp) = (E + p)(E − p) = E2 − p2 ≡ m2 , (9.86)
kuris yra ne kas kita, kaip keturmačio intervalo tvermės dėsnis, tik užrašytasne laikui ir koordinatei, o jų sujungtiniams6 dydžiams — energijai ir trimačiamimpulsui. Skaliarinis dydism vadinamas dalelės mase. Jei dalelė mūsų atžvilgiunejuda, tada p = 0, ir įrašę tikrąją šviesos greičio vertę gauname visiems žinomąformulę E = mc2.
6Minėtus dydžius sieja simetrijos operacija ir ją atitinkantis tvarus fizikinis dydis (E. Noetherteorema). Kitaip tariant, impulsą galime apibrėžti todėl, kad fizikinė sistema yra invariantiškatransliacijoms erdvėjex → x
′, o energijos tvermė išplaukia iš to, kad fizikinė sistema nepasikeičiają pastūmus laike.

Cl1,3 algebra ir reliatyvumo teorija 233
Neturinčiai masės dalelei, pavyzdžiui, fotonui, intervalas lygus nuliui, todėl
k2 = (kγ0)(γ0k) = (ω + k)(ω − k) = ω2 − k2 = 0 , (9.87)
kur pasinaudojome tuo, kad bemasės dalelės impulsas yra proporcingas bangosvektoriui p = ~k, o energija — dažniui E = ~ω (naudojame ~ = 1 vienetųsistemą). Iš (9.87) iš karto išplaukia šviesos dispersijos dėsnis vakuume,ω = |k|,galiojantis visose inercinėse koordinačių sistemose.
Iš (9.55) jau žinome, kad keturmačio greičio perskėlimas duoda Lorentzodaugiklį γ ir reliatyvų greitį v. Greičio kvadrato vertė po perskėlimo išlieka lygivienetui,
v2 = vγ0γ0v = γ(1 + v)γ(1− v) =1− v2
(√1− v2
)2 = 1 , (9.88)
kur atlikdami skaičiavimus pasinaudojom (9.62) formule.Perskelti galima ne tik keturmačius fizikinius dydžius, bet ir diferencijavimo
operatorių. Skirtumas tik toks, kad, kaip žinom iš 6 skyriaus, diferencijavimooperatoriai užrašomi dualioje bazėje. Todėl skeldami erdvėlaikį (nes indeksusreikia nuleisti) prie erdvinių sandų gauname kitus ženklus,
∇γ0 = (γ0∂t + γi∂i)γ0 = ∂t − σi∂i = ∂i −∇. (9.89)
Čia ∇ jau žymi trimatę erdvinę vektorinę išvestinę ∇ = σk∂k , k = 1, 2, 3.Panašiai kaip ir (9.80) formulėje, dauginant iš γ0 iš kitos pusės ženklai keičiasi,
γ0∇ = ∂t +∇ . (9.90)
9.5.1. Lorenzo transformacija. Knygų apie reliatyvumo teoriją skyriuosevisada rasite Lorenzo transformacijų formules [42, 44],
t′ =t+ x1v/c
2»1− (v/c)2
= γ(t+ x1v/c2), (9.91a)
x′1 =x1 + vt»1− (v/c)2
= γ(x1 + vt), (9.91b)
susiejančias dviejų inercinių stebėtojų koordinates ir laikus po stūmio γ10 plokš-tumoje. Čia reliatyvus greitis v = |v| nukreiptas išilgai x1 ir x′1 ašių. Iš-vesime šias formules atlikę sukimą erdvėlaikyje. Iš 9.3 lentelės matome, kadperskėlę keturmatį įvykio vektorių, t. y. xγ0 = ct + x ir x′γ0 = ct′ + x′,gauname laiką t ir koordinatę x, kurią matuoja tas stebėtojas. Pažymėję x =ctγ0+x1γ1+x2γ2+x3γ3 ir jį pasukę, t. y. atlikę Lorentzo transformaciją, gau-

234 9 skyrius
name naują keturmatį vektorių,
x′ =eγ10α/2xe−γ10α/2
=(ct chα+ x1 shα)γ0 + (x1 chα+ ct shα)γ1 + x2γ2 + x3γ3 .(9.92)
Pasinaudoję (9.62) ir (9.63) formulėmis ir išreiškę hiperbolines funkcijas per Lo-rentzo daugiklį γ = (1− v2/c2)−1/2, po perskėlimo randame
x′γ0 = cγ(t+ x1v/c2) + (x1 + vt)γσ1 + x2σ2 + x2σ3 . (9.93)
Sulyginę narius prie atitinkamų bazinių elementų gautoje formulėje ir palyginęsu x′γ0 = ct′+(x′1σ1+x
′2σ2+x
′3σ3) gauname (9.91) lygtis. Taip pat randame,
kad x′2 = x2 ir x′3 = x3, t. y. statmeni stūmio krypčiai sandai nepasikeičia.Kaip šias koordinačių transformacijų formules taikyti eksperimente matuo-
jamiems ilgiams ir laikų intervalams? Norėdami išreikšti laiko intervalą ∆t′ ju-dančioje sistemoje per nejudančios sistemos savąjį intervalą T , fiksuojame ko-ordinatę, pavyzdžiui, x1 = 0. Tada iš (9.91a) formulės randame ∆t′ =
Ät′(t =
T )−t′(t = 0)ä= γT−0 = γT . Panašiai, norėdami surasti ilgį∆x′1, (9.91b) for-
mulėje fiksuojame laiką, pavyzdžiui, t′ = 0. Tam pradžioje iš (9.91a) surandamelaiką, t = (t′/γ)− (x1v/c
2), ir įstatome jį į (9.91b),
x′1 = γ
Çx1(1− v2
c2
)+t′vγ
å=x1γ
+ t′v. (9.94)
Tada iš (9.94) gauname, kad momentu t′ = 0 turime ∆x′1 =Äx′1(x1 = X) −
x′1(x1 = 0)ä= (X/γ)− 0 = X/γ , kur X yra ilgis nejudančioje koordinačių
sistemoje (savasis ilgis). Tai reiškia, kad judančioje koordinačių sistemoje strypoilgis sumažėja, ∆x′1 = X/γ , nes γ ≥ 1. Taigi, Lorentzo transformacija ilgio irlaiko intervalų ilgius padaugina iš atvirkštinių daugiklių,
∆t′ = γT, ∆x′1 = X/γ . (9.95)
Sudauginus abu dydžius jie vienas kitą kompensuoja, ∆x′1∆t′ = TX . Tai reiš-
kia, kad erdvėlaikio pasukimas ploto TX nepakeičia. Kitais žodžiais, jei erdvė-laikį padalintume į elementarias ląsteles, jų skaičius po Lorentzo transfomacijosnepasikeistų (žr. 3.5c pav.). Jei rotoriaus eksponentėje (9.92) vietoje γ10 įrašytu-me bendro pavidalo laikiškąjį bivektorių σ, gautume bendresnę bekoordinatinęformulę. Aišku, kad ir kitų keturmačiais vektoriais aprašomų fizikinių dydžiųporos tansformuosis lygiai taip pat, kaip koordinatės t ir x ar jų intervalai T irX .

Cl1,3 algebra ir reliatyvumo teorija 235
Laiko intervalo pailgėjimo7 reiškinys eksperimentiškai buvo įrodytas lygi-nant dėl kosminių spindulių poveikio atmosferoje susidariusių miuonų srautą ant1,9 km aukščio kalno ir jo papėdėje. Tokie miuonai juda dideliu 0,993 c greičiu.Jų vidutinė savoji gyvavimo trukmė yra T = 2,2 µs. Tačiau laboratorijoje esan-čiam stebėtojui trukmė pailgėja iki ∆t′ = 18,6 µs, t. y. 8,5 karto. Kaip buvoišmatuotas laiko pailgėjimas stovinčiam stebėtojui demonstruojama istoriniamefilme “Time dilation — an experiment with mu-mesons“, kurį rasite internetosvetainėje http://www.scivee.tv/node/2415.
9.13 pavyzdys. Eksperimentiškai išmatuota, kad miuono, į elektroną panašios masy-vios elementariosios dalelės, vidutinėgyvavimo trukmė yra T ≈ 10−6 s. Jei iš palydovo,kuris skrenda 100 km aukštyje, nukreiptume miuonų srautą į Žemę, kokiu greičiu šiosdalelės turėtų lėkti, kad dauguma jų pasiektų paviršių?
Jei palydovo orbitos aukštį padalinsime iš vidutinės šių dalelių gyvavimo trukmės,gausime 105/10−6 = 1011 m/s. Tai greitis, kuris gerokai viršija šviesos greitį c ≈3·108 m/s. Todėl net judant didžiausiu leistinu šviesos greičiu paviršių galėtų pasiekti tiknykstamai maža pradinio šių dalelių srauto dalis. Aišku, toks apskaičiavimas nėra teisin-gas, nes sumaišėm skirtingų stebėtojų dydžius. Miuonų greitis, kurį matuoja stebėtojas,esantis ant Žemės ar palydove (į Žemės paviršiuje ir palydove esančių stebėtojų greičiųskirtumą, kuris yra mažas palyginus su šviesos greičiu, galime nekreipti dėmesio), yra
v = ∆y′/∆t′ = ∆y′/(γT ) = ∆y′»1− v2
c2 /T . Išsprendę v atžvilgiu randame miuonų
greitį v/c =(1+(cT/∆y′)2
)−1/2=(1+(3 ·108 ·10−6/105)2
)−1/2= 0,999 996. Tai-
gi, norint, kad daugelis miuonų pasiektų Žemės paviršių, jų greitis turi būti labai artimasšviesos greičiui.
9.6. Reliatyvistinės dalelės kinematika⋆
Reliatyvistinės dalelės judėjimą galima aprašyti Lorenzo rotoriumi L. Lai-kant, kad rotorius priklauso nuo parametro, pavyzdžiui, nuo savojo laiko τ , ir juosukant γ0, nusakoma visa dalelės pasaulinė trajekorija x(τ) = L(τ)γ0L(τ). Pa-našiai galima elgtis aprašant keturmačio impulso dinamiką p = L(τ)mγ0L(τ),kur m = E/c2 yra dalelės masė. Šiame skyriuje išspręsime tolygiai apskritimubesisukančios reliatyvistinės dalelės uždavinį.
Paimkime be galo mažą standų kūną, kurio padėtį nusako taškas erdvėje.Jo keturmatė trajektorija yra x(τ), o savasis greitis v(τ) = x(τ). Keturmačio
7Populiarioje literatūroje sakoma, kad judančio kūno laikas sulėtėja. Tai kiek klaidinantisišsireiškimas. Iš tikrųjų mezono savasis laikas, kaip ir jo savoji masė, nepasikeičia, nepriklausomainuo to, ar jis juda, ar stovi. Ne veltui fizikos žinynai būtent tokius dalelių parametrus ir pateikia.Reliatyvumo teorija tik tvirtina, kad išmatuotos vertės priklauso nuo to, ar eksperimentatoriusmatuojamo objekto atžvilgiu juda, ar ne.

236 9 skyrius
greičio v(τ) kryptį erdvėlaikyje keičia Lorentzo sukimai
v(τ) = R(τ)γ0R(τ) , (9.96)
kuriuos aprašo rotorius R(τ). Jei dalelę veiktų jėga, jos veikimą taip pat būtųgalima aprašyti rotoriumi ir suvesti į lygtį, kuri nusakytų to rotoriaus evoliuciją.Toks požiūris į reliatyvistinės dalelės judėjimą gali gerokai palengvinti uždavi-nio sprendimą, nes lygtis rotoriui dažnai yra paprastesnė. Kai rotorius jau yražinomas, pasinaudoję Lorentzo transformacija lengvai rasime dalelės trajektorijąir kitus dydžius.
Pirmiausia pagreitį užrašysime per rotorių. Savąjį pagreitį nusako lygtis
v =∂
∂τ
ÄR(τ)γ0R(τ)
ä= Rγ0R+ Rγ0
˙R = RRv + vR ˙
R , (9.97)
kur paskutiniame žingsnyje pasinaudojome (9.96) sąryšiu. Rotorių sudaro tik ly-ginio rango elementai (skaliaras, bivektorius ir pseudoskaliaras), todėl sandaugą
R˙R taip pat sudarys tik lyginio rango elementai. Kadangi kairėje pusėje stovi vek-
torius v, tai ir dešinėje (9.97) lygybės pusėje turi būti vektorius. Išdiferencijavę
tapatybę RR = 1 gauname RR + R˙R = 0, arba R
˙R = −RR. Pasinaudoję ja
lygtį (9.97) perrašome pavidalu
v = RRv − vRR = 2(RR) · v , (9.98)
nes dešinėje (9.98) pusėje vektorių galime gauti tik tada, jei RR yra grynas bi-vektorius. Nesunku patikrinti, kad užrašytas pagreitis yra statmenas greičiui. Iriš tiesų, apskaičiavę abiejų dydžių vidinę sandaugą matome, kad ji lygi nuliui,
2v · v = vv + vv = vRRv − v2RR+ RRv2 − vRRv = 0 , (9.99)
kur reiškinio suprastinimui pasinaudojom savojo greičio savybe v2 = 1.Iš (9.98) išplaukia, kad sandauga vv yra grynas bivektorius vv = v ∧ v. Su
rotoriumi R jį sieja lygtis
vv = 2Ä(RR) · v
äv , (9.100)
kuri nusako pagreičio vv dydį ir orientaciją stebėtojo v koordinačių sistemoje lai-ko momentu τ . Kai vektorius v yra laikiškasis, (9.100) formulę galime supapras-tinti, nes tada rotorius R yra apibendrintas stūmis, t. y. rotoriaus eksponentėjestovi laikiškasis bivektorius B. Tokiu atveju kvadratas B2 > 0 yra teigiamas,todėl apibendrintai sakysim, kad turim Lorentzo pernašą (žr. 9.14 pavyzdį). Pri-minsime, kad B2 = 1 atvejis atitinka grynąjį Lorentzo stūmį.
Supaprastintą išraišką Lorentzo pernašai gausim pasinaudoję (9.44) formule,kuri stūmį išreiškia per dviejų inercinių sistemų greičius. Iš formulės išplaukia,

Cl1,3 algebra ir reliatyvumo teorija 237
kad tarp dviejų artimų savųjų greičių, v(τ) ir v(τ + δτ) ≈ v(τ) + δτ v, rotoriųgerai aproksimuoja formulė
R =1 + v(τ + δτ)v(τ)√
2Ä1 + v(τ + δτ) · v(τ)
ä ≈ 1 +1
2δτ vv . (9.101)
Tačiau rotorių galima išskleisti ir kitaip,
R(τ + δτ) ≈ R(τ) + δτ R = (1 + δτ RR)R(τ) . (9.102)
Paėmę ribą R(τ → 0) = 1 ir sulyginę abi formules, randame
vv = 2RR . (9.103)
Taigi, Lorentzo pernašos atveju (9.100) virsta į (9.103). Ją galima palyginti su4 skyriaus išraiška (5.121) rotoriaus dinamikai, kurią gavome spręsdami stan-džiojo kūno sukimosi Euklido erdvėje uždavinį. Formule (9.103) pasinaudosimspręsdami apskritimu judančios reliatyvistinės dalelės uždavinį. Jei narį vv gali-ma užrašyti kaip rotorių ar jų sandaugą, panašiai kaip (9.103) formulėje, sakysi-me, kad turime Fermio tipo pernašą.
9.14 pavyzdys. Iki šiol hiperbolinėmis funkcijomis skleidėme Lorentzo rotorius, ku-rių eksponentėje bivektorius tenkino sąlygą B2 = 1. Dabar apskaičiuosim e±Bα, kaiB2 ≥ 0, t. y. Lorentzo pernašą. Reikalingą skleidinį galima gauti eksponentę užra-šius eilute, pergrupavus narius ir juos susumavus. Tačiau skaičiavimus galima atlikti irpaprasčiau. Tuo tikslu užrašykime B kaip skaliaro ξ =
√B2 = |B| ir normuoto bivekto-
riaus B2 = 1 sandaugą B = ξB. Sandaugą ξα laikydami nauju stūmio parametru galim
rašyti eB(ξα) = ch(ξα) + B sh(ξα). Iš čia išplaukia, kad
e±Bα = ch(|B|α)± B|B| sh(|B|α). (9.104)
Tokiu pačiu būdu galima išskleisti eksponentę ir kai B2 < 0,
e±Bα = cos(|B|α)± B|B| sin(|B|α), (9.105)
kur dabar |B| =√−B2.
9.6.1. Thomo precesija. Plokštumoje γ1γ2 nubrėžkime apskritimą, kuriospindulys a. Tegu juo juda taškas, su kuriuo susiesime koordinačių sistemą,sudarytą iš bazinių vektorių e0 ir e1, kaip pavaizduota 9.7 paveiksle. Kadangitrajektorija kreiva, dalelė juda su pagreičiu. Koordinačių sistemoje γ0, γ1, γ2kryptis γ3 pašalinta kaip triviali, nes ji yra statmena sukimosi plokštumai. Siste-moje γ0, γ1, γ2 laikui bėgant dalelės trajektorija brėš kažką panašaus į spiralę.Nustatykime tikslią trajektorijos formą stovinčio stebėtojo u = γ0 atžvilgiu.

238 9 skyrius
Pirmiausia užrašykime dalelės pasaulinę trajektoriją,
x(τ) =t(τ)γ0 + aÄγ1 cosωt(τ) + γ2 sinωt(τ)
ä, (9.106)
kur τ žymi savąjį laiką besisukančio taškinio kūno koordinačių sistemoje, o t =t(τ) yra laikas koordinatinėje sistemoje, kurioje u = γ0. Išdiferencijavę pagal τapskaičiuojame dalelės savąjį greitį,
v = x = t(τ)îγ0 + aω
Ä− γ1 sinωt(τ) + γ2 cosωt(τ)
äó. (9.107)
Reliatyvus greitis, kurį matuoja γ0 sistemos stebėtojas, yra u = (v ∧ γ0)/v · γ0arba
u = aωÄσ1 sinωt(τ)− σ2 cosωt(τ)
ä. (9.108)
Tuomet iš (9.49) ir (9.51) formulių išplaukia, kad greičio amplitudė yra |u| = aω.Laiko išvestinę t(τ) pakeiskime monotoniškai augančiu hiperbolinio kosinu-
so kampuα, t. y. t(τ) = chα. Savo ruožtu sąlygą v2 = 1 patenkinsime tik paėmęaω = thα. Tada greitį (9.107) galime užrašyti kaip γ0 pasukimą erdvėlaikyje,
v = γ0 chα+ shαÄ− γ1 sinωt+ γ2 cosωt
ä= eαn/2γ0e
−αn/2, (9.109)
9.7 pav. x(τ ) trajektorijaerdvėlaikyje, kurios baziniaivektoriai eµ = R(τ )γµR(τ )priklauso nuo savojo laiko τ .Savieji greičiai bet kuriuomomentu tenkina sąryšįv2(τ ) = 1. Po stūmio greičiopokytis guli plokštumoje v ∧ v
kur e±αn/2 = ch(α/2) ± n sh(α/2) ir n =−σ1 sinωt+σ2 cosωt. Trimatį vektoriųn taippat patogu išreikšti eksponentėmis
n = Rωσ2Rω , (9.110)
kur
Rω = e−Iσ3ωt/2 = cosωt
2− Iσ3 sin
ωt
2.
(9.111)Tada eksponentę enα/2 galime užrašyti kaip tri-jų rotorių sandaugą,
enα/2 = eαRωσ2Rω/2 = RωRαRω , (9.112)
kur
Rα = eσ2α/2 = chα
2+ σ2 sh
α
2. (9.113)
Visų šių manipuliacijų rezultatas yra tas, kad sa-vąjį greitį užrašėme vien per rotorių sandaugą,
v = RωRαRωγ0RωRαRω = RωRαγ0RαRω ,
(9.114)

Cl1,3 algebra ir reliatyvumo teorija 239
kur paskutiniame žingsnyje pritaikėme komutacinį sąryšį [γ0,Rω] = 0 ir kurioteisingumą nesunku patikrinti pasinaudojus (9.110) formule. Padarykime prie-laidą, kad sandaugą vv galima užrašyti kaip Fermio tipo pernašą. Kitaip tariant,jos ieškosime rotorių sandaugos pavidalu,
R = RωRαΦ , (9.115)
kuriojeΦ kol kas yra nežinomas rotorius. Norėdami jį surasti pirmiausia apskai-čiuokime bivektorių vv. Apibrėžę naują vektorių vα = Rαγ0Rα = chαγ0 +
shα γ2, greitį (9.114) užrašykim pavidalu v = RωvαRω. Jo išvestinė yra v =
RωvαRω + Rω vαRω + Rωvα˙Rω . Pasinaudoję dar kartą bendra normuotų roto-
rių savybe RωRω = − ˙RωRω = −Iσ3
ω2 ir tuo, kad vα = 0, bei įdėję šiek tiek
pastangų gauname rezultatą vv,
vv = RωvαvαRω + Rωvα˙RωRωvαRω = Rω
Ä2(RωRω) · vαvα
äRω
= −ωRωÄ(Iσ3) · vαvα
äRω
= ω shαRωÄ− σ1 chα + Iσ3 shα
äRω .
(9.116)
Dabar apskaičiuokime sandaugą 2RR, sudarytą iš rotorių (9.115),
2RR =2RωRω + 2RωRαΦΦRαRω = −Iσ3ω + 2RωRαΦΦRαRω . (9.117)
Pasinaudoję (9.103) sąlyga ir sulyginę (9.116) ir (9.117) išraiškas, randame 2ΦΦ,
2ΦΦ = ω chαRαÄ− σ1 shα+ Iσ3 chα
äRα = Iσ3ω chα . (9.118)
Gautos diferencialinės lygties sprendinys, kai pradinė sąlyga Φ(t = 0) = 1, yra
Φ = eIσ3 chαωt/2. (9.119)
Įstatę jį į (9.115) formulę pagaliau gauname atsakymą:
R = e−Iσ3ωt/2eσ2α/2eIσ3 chαωt/2. (9.120)
Žinant rotorių jau nesunku apskaičiuoti, kaip keičiasi apskritimu judantys bazi-niai vektoriai, eµ = RγµR. Atsakyme (9.120) rotoriuje pasirodė naujas svarbusnarys ch α. Jis yra atsakingas už Thomo precesiją. Jei šio nario nebūtų, t. y. jeipaimtume ch α = 1, tai po kiekvieno n-ojo periodo baziniai vektoriai ei grįžtųį pirminę padėtį,
e1(0) = e1(n2π/ω) = γ1,
e2(0) = e2(n2π/ω) = γ2 chα+ γ0 shα .(9.121)

240 9 skyrius
Tačiau dėl chα jau po pirmo periodo T = 2π/ω bazinis vektorius e1 į pradinępadėtį negrįžta,
e1(T ) = γ1 cos(2π chα)− (γ2 chα+ γ0 shα) sinÄ2π chα
ä. (9.122)
Tai aiškiai matome paėmę mažą stūmio kampą α ir išraišką išskleidę eilute,
e1(T ) ≈ γ1 − πα2γ2 . (9.123)
Todėl galima daryti išvadą, kad reliatyvistinėje mechanikoje standus kūnas nesi-suka ratu, kaip yra klasikinėje mechanikoje, nes e1(T ) 6= e1(0). Atsiranda pa-pildomas, periodiškumą suardantis judėjimas. Jis vadinamas Thomo precesija.Thomo precesija nėra susijusi su jokia išorine jėga. Ją lemia paties erdvėlaikio sa-vybės. Deja, reiškinys labai mažas, α2 eilės (kadangi thα = aω, taiα2 ≈ a2ω2),todėl norint jį pastebėti reikalingi milžiniški sukimosi greičiai. Eksperimentiš-kai Thomo precesijos iki šiol niekam tiesiogiai nepavyko užregistruoti. Daugybęstraipsnių apie Thomo precesiją ir jų analizę rasite apžvalgoje [45]. Puslaidinin-kių fizikos kontekste ji išsamiai aptarta [46] straipsnyje.
Plačiau ir giliau reliatyvumo teorija geometrinės algebros kalba nagrinėjamaknygose [13, 32, 47] ir apžvalgoje [48].

10. Reliatyvistinė elektrodinamika
Elektrodinamikos, su kurios matematiniu aparatu susipažinome 7 skyriu-je, negalima taikyti greitai judantiems kūnams ir krūviams, nes Maxwello lyg-tis užrašėme klasikinėje Cl3,0 algebroje. Reliatyvistiniais greičiais judančiomselektringoms dalelėms ši algebra netinka. Judančių kūnų ir dalelių sąveiką suelektromagnetiniu lauku teisingai aprašysime tik tuo atveju, jei Maxwello lygtystransformuosis kaip Minkowskio erdvės baziniai vektoriai. Šiame skyriuje lygtisperrašysime Cl1,3 algebroje. Pamatysime, kad tuomet keturias Maxwello lyg-tis vakuume labai kompaktiškai galima užrašyti vos viena diferencialine lygtimi.Įdomu tai, kad pačios Maxwello lygtys buvo užrašytos anksčiau negu išaiškėjoreliatyvistinis jų pobūdis, t. y. dar gerokai prieš reliatyvumo teorijos atsiradi-mą. Pademonstruosime, kaip su reliatyvistine Maxwello lygtimi apskaičiuoti supagreičiu judančio krūvio išspinduliuojamą elektromagnetinį lauką.
10.1. Maxwello lygtys Cl1,3 algebroje
7 skyriuje užrašytose Maxwello lygtyse laiko ir erdvės kintamieji, panašiaikaip ir Galilei’aus transformacijoje, nėra lygiaverčiai. Todėl atlikus Lorentzotransformaciją lygtys neatpažįstamai pasikeičia. Tai nėra gerai. Iš tiesų, jei elekt-romagnetinį lauką laikomefizikinės realybės dalimi, tai pereinant iš vienos judan-čios koordinačių sistemos į kitą leistinų pasikeitimų forma yra griežtai apribota,— juos nusako Lorentzo transformacija. Kitaip tariant, lygtyse esantys fiziki-niai dydžiai turi transformuotis kaip Minkowskio erdvės vektoriai, arba bendriau,kaip šios erdvės bivektoriai, trivektoriai ir t. t. Kaip netrukus pamatysime, to gali-ma pasiekti, jei iš Euklido erdvės Cl3,0 algebros dydžių sudarysime kombinacijas,kurios transformuosis pagal reliatyvistinės Cl1,3 algebros taisykles.
Tokias kombinacijas sukonstruoti mums padės ankstesniame skyriuje aptar-ta erdvėlaikio perskėlimo procedūra. Kaip jau žinome, ji pagrįsta tuo, kad Cl3,0algebra sudaro lyginį Cl1,3 algebros poaibį, Cl3,0 ∼=Cl+1,3. Todėl pirmiausia su-jungsime Maxwello lygties išvestines pagal laiką ∂t ir koordinatę, t. y. nablaoperatorių ∇, į vieną erdvėlaikio diferencijavimo operatorių. Gautą operato-
241

242 10 skyrius
rių vadinsime keturmate nabla, o jos simbolio ∇, kaip darėme rašydami ir ki-tus keturmačius dydžius, juodžiau neparyškinsime. Šio operatorius koordinatinisskleidinys yra
∇ = γµ∂µ, ∂µ =∂
∂xµ. (10.1)
Iš 9 skyriaus (9.89) formulės jau žinome, kaip suskyla šis operatorius atlikuserdvėlaikio perskėlimą iš dešinės. Skeldami jį iš kairės, t. y, padauginę nablą išγ0 iš kairės, gausime priešingą erdvinės dalies ženklą, nes pakeliant ir nuleidžiantindeksus ženklą keičia tik erdviniai vektoriai, tuo tarpu laiko ašies vektoriausženklas dualioje bazėje išlieka tas pats,
γ0∇ = γ0(γ0∂t + γi
∂
∂xi
)= ∂t + σi
∂
∂xi= ∂t +∇ . (10.2)
Primename, kad trys laikiškieji bivektoriai σi = γiγ0 sudaro lyginio poerdvioCl+1,3 ortonormuotą bazę σ1,σ2,σ3, kurioje skleidėme trimatį nabla operato-rių,
∇ = σ1∂/∂x1 + σ2∂/∂x2 + σ3∂/∂x3 . (10.3)
Maxwello lygtis pervedant į Cl1,3 pasinaudosime 7.1 skyriaus lentele, kurio-je surašytos įprastos Maxwello lygtys ir jų atitikmenys Cl3,0 algebroje. Imsimevakuumą ir patogumo dėlei naudosime natūralių vienetų (c = ǫ0 = µ0 = 1)sistemą, kurioje šias Maxwello lygtys perrašysim šiek tiek kitaip:
∇ ·E = ρ, ∇ · B = − J − ∂tE, (10.4a)
∇ ∧E =− ∂tB, ∇ ∧ B =0 . (10.4b)
Dabar, pritaikę formulę ∇a = ∇ ·a+∇∧a, divergenciją ir rotorių sujungsimeį vieną geometrinės algebros operatorių. Sudėję lygtis, į kurias įeina elektrinislaukas, ∇ ·E ir ∇ ∧E, gauname
∇E = ρ− ∂tB . (10.5)
Likusių dviejų lygčių suma duoda
∇B = −J − ∂tE . (10.6)
Taigi, pirmoji lygtis, (10.5), yra skaliaro ∇ · E ir bivektoriaus ∇ ∧ E suma, oantroji, (10.6), — vektoriaus ∇ · B ir pseudoskaliaro ∇ ∧ B, kuris šiuo atvejuyra nulis, suma. Todėl galime eiti toliau ir abi lygtis sujungti į vieną,
∇(E + B) + ∂t(E + B) = ρ− J . (10.7)
Gautoji lygtis, į kurią įeina 0, 1, 2 ir 4 rangų multivektoriai, atstoja visas keturiasMaxwello lygtis. Atskirą Maxwello lygtį iš jos nesunku išskirti paėmus norimorango projekciją.

Reliatyvistinė elektrodinamika 243
Lygties (10.7) struktūra rodo, kad paranku įvesti naują fizikinį dydį, lygųelektrinio lauko vektoriaus ir magnetinio lauko bivektoriaus sumai1,
F → F = E + B = E + IB. FARADAY’AUS LAUKAS (10.8)
Tai multivektorius, su kuriuo jau esame susidūrę 7 skyriuje. Faraday’aus laukas(10.8) formulėje yra vektoriaus ir bivektoriaus suma, todėl jį užrašėme multivek-toriaus šriftu F. Perėjus į Cl1,3 algebrą, kaip matėme 9 skyriuje, Faraday’auslaukas tampa dviejų bivektorių — laikiškojo E ir erdviškojo B — suma. Todėltoliau Faraday’aus lauką žymėsime rašytiniu šriftuF . Panašiai yra ir su keturma-te srove J . Cl3,0 algebroje ji yra skaliaro (tankio) ir trimačio vektoriaus (srovės)suma, o Cl1,3 algebroje tai grynas keturmatis vektorius. Perėjimą iš Cl1,3 į Cl3,0algebrą realizuoja erdvėlaikio perskėlimas (žr. 9.3 lent.). Kadangi Faraday’auslauko diferencialinė lygtis Ä
∇+ ∂täF = ρ− J (10.9)
atstoja visas keturias Maxwello lygtis, tai vienas Faraday’aus laukas vakuumeapibendrina visą turimą informaciją apie elektromagnetinį lauką. Dėl šios prie-žasties reliatyvistinę teoriją pilnai sukonstruosime suradę šios vienintelės lyg-ties Lorentzo kovariantinį atitikmenį. Tai lengva padaryti: pakanka Cl3,0 algeb-ros elementus pervadinti Cl1,3 algebros elementais. Užduotį labai palengvinair tai, kad, kaip parodėme 9 skyriuje, abiejų algebrų pseudoskaliarai sutampa,I = σ1σ2σ3 = γ0γ1γ2γ3.
Pradėkime nuo dešinėje (10.9) lygties pusėje užrašytos trimatės srovės ir krū-vio tankių sumos. Vietoje jos įveskime reliatyvistinį keturmatės srovės tankį J(toliau jį trumpumo dėlei dažnai vadinsime tiesiog srove), kurį perskėlę, kaip9.3 lentelėje, gautume elektrinio krūvio tankį ρ ir srovės tankį J (trimatės srovėsvektorių) Euklido erdvėje,
ρ− J = γ0 · J + γ0 ∧ J = γ0J, kur ρ = J · γ0, J = J ∧ γ0 . (10.10)
Pritaikę nabla operatoriaus perskėlimo formulę (9.89), t. y. (∂t + ∇) = γ0∇,Maxwello lygtį (10.9) laukui F galime perrašyti paprasčiau,
γ0∇F = γ0J , (10.11)
o iš kairės padauginę ją iš γ0 gauname ypač kompaktišką pavidalą:
∇F = J .RELIATYVISTINĖ
MAXWELLO LYGTIS(10.12)
1Šiuolaikiniu supratimu pirminė elektromagnetinio lauko pora yra (E,B). Kita pora (D,H)yra tik išvestinė, priklausanti nuo terpės, kurioje sklinda banga, savybių. Todėl šią porą siūlomavadinti ne lauku, o sužadinimu (angl. excitation). Žr. taip pat pastabą 154 psl.

244 10 skyrius
Tai bekoordinatinė lygtisCl1,3 algebroje. Kadangi bivektoriųF galim įsivaizduo-ti kaip orientuotą plokštumą, kurios abi pusės nudažytos skirtingomis spalvomis,tai geometriškai (10.12) lygtis aprašo, kaip ši plokštuma vartosi keturmatėje erd-vėje. Jei erdvėje nėra nei srovių, nei laisvų krūvių, tada J = 0, ir lygtis nusakoelektromagnetinės bangos sklidimą erdvėlaikyje.
Elektrinį ir magnetinį laukus galima išskleisti tiek Cl3,0, tiek ir Cl1,3 algebrųbaziniais elementais,
E = E1σ1 +E2σ2 + E3σ3 = E1γ1γ0 +E2γ2γ0 + E3γ3γ0,
B = B1Iσ1 + B2Iσ2 + B3Iσ3 = B1γ3γ2 +B2γ1γ3 + B3γ2γ1, (10.13)
B = B1σ1 +B2σ2 + B3σ3 = B1γ1γ0 +B2γ2γ0 + B3γ3γ0,
kur B = IB ir B = −IB. Atkreipkite dėmesį, kad Cl1,3 algebroje abu lau-kai, elektrinis ir magnetinis (kraštinė dešinioji pusė), yra bivektoriai. Todėl Lo-rentzo sukimai šiuos laukus permaišo tarpusavyje. Visai kitokį vaizdą matomeCl3,0 algebroje (kairioji pusė), kurioje elektrinis laukas yra vektorius (sandaiσi), o magnetinis laukas — bivektorius (sandai Iσi). Sukimai Euklido erdvėjeskirtingo rango laukų vieno į kitą transformuoti negali. Elektromagnetinį laukąF = E+B galima užrašyti ir matriciniu pavidalu, jei Cl1,3 algebros bazinius bi-vektorius pakeisime atitinkančiomis matricomis, kurias rasime sudauginę Diracomatricas (9.1):
F =
iB3 B2 + iB1 E3 E1 − iE2
−B2 + iB1 −iB3 E1 + iE2 −E3
E3 E1 − iE2 iB3 B2 + iB1
E1 + iE2 −E3 −B2 + iB1 −iB3
. (10.14)
10.1 pavyzdys. Diraco matricos taip pat leidžia atlikti atvirkščią transformaciją: per-eiti iš matricinio į Cl1,3 algebros atvaizdį. Pavyzdžiui, tarkime, kad turime matricinį lau-ką (10.14). Tuomet į geometrinės algebros pavidalą galėtume pereiti pritaikę universaliąprojekcijų skaičiavimo išraišką (8.11). Šiuo atveju bivektorių koeficientus apskaičiuo-tume pagal formulę Tr(F B†)/4, kur Tr žymi matricos pėdsaką (diagonalinių elementųsumą), o B† yra bazinės bivektoriaus matricos kompleksinis sujungtinis elementas. Su-dauginkitematricas ir suradę pėdsaką įsitikinkite, kad elektrinio lauko projekcijąE1 prieelementaraus bivektoriaus γ1γ0 gauname apskaičiavę išraišką
E1 = Tr(F (γ1γ0)
†)/4 . (10.15)
Lygiai taip pat surandami ir visi kiti bivektoriniai sandai. Patikrinkite, kad skaičiuodamikoeficientus prie vektorių, trivektorių, pseudoskaliaro ir skaliaro gauname nulį.
Matrica (10.14) yra pilnateisis geometrinės algebros objektas (bivektorius),tik užrašytas matricinėje formoje. Deja, tokia forma jau nieko neleidžia pasakyti

Reliatyvistinė elektrodinamika 245
apie laukų rangus, o tuo pačiu ir apie laikiškąją ir erdviškąją elektromagnetiniolauko sandarą. Taigi, dingsta labai aiškus ir lengvai įsimenamas elektromagne-tiniu lauku užpildyto erdvėlaikio geometrinis vaizdinys. Tuo tarpu bivektoriausforma (10.8) yra kur kas patogesnė. Pavyzdžiui, pritaikęs jai erdvėlaikio perskėli-mo procedūrą, stebėtojas visada gali pasakyti, kokiądalį EM lauko jo koordinačiųsistemoje sudaro elektrinis ir kokią magnetinis laukas.
Kadangi Maxwello lygtyje (10.12) stovi keturmačiai multivektoriai, tai at-liekant Lorentzo transformaciją (sukimą erdvėlaikyje) jie transformuojasi kova-riantiškai, t. y. kaip Minkowskio erdvės vektoriai. Todėl šis lygties pavidalasmėgstamas elementarių dalelių teorijoje ir kosmologijoje, — visur, kur reliatyvis-tiniai reiškiniai vaidina pirmaeilį vaidmenį. Teoriniu požiūriu Maxwello lygties(10.12) pavidalas labai svarbus dar ir tuo, kad keturmačiam geometrinės algebrosnabla ∇ operatoriui visada egzistuoja atvirkštinis integralinis operatorius, vadi-namas Greeno funkcija. Tuo tarpu nei divergencijai, nei rotoriui atskirai (iš kuriųsudarytas∇) tokių atvirkštinių operatorių užrašyti negalima dėl anksčiau aptartovidinės ir išorinės sandaugų nevienareikšmiškumo. Todėl (10.12) lygčiai galimeiš karto užrašyti formalų Maxwello lygties sprendinį,
F = ∇−1J , (10.16)
kur ∇−1 yra interpretuojamas kaip integralinis operatorius. Šios lygties dešinė-je pusėje stovi dviejų vektorinių dydžių sandauga, todėl neperskelta integralinė(10.16) lygtis aprašo visą klasę naujų analizinių Maxwello lygties sprendinių.
Iš Maxwello lygties geometrinėje algebroje labai paprasta išvesti krūvio tver-mės dėsnį. Tuo tikslu (10.12) lygtį padauginkime iš kairės iš keturmačio nabla,
∇2F = ∇J = ∇ · J +∇∧ J . (10.17)
Algebros požiūriu ∇ elgiasi kaip vektorius, todėl jo kvadratas ∇2 = ∂2t − ∂2x1 −∂2x2 − ∂2x3 yra skaliarinis operatorius, kuris nekeičia multivektoriaus rango. Taireiškia, kad narys∇2F yra grynas bivektorius. Tuo tarpu dešinėje (10.17) lygtiespusėje matome ir skaliarą, ir bivektorių. Vadinasi, skaliaras ∇ · J privalo būtilygus nuliui,
∇ · J =∂ρ
∂t+∇ · J = 0 . (10.18)
Tai gerai fizikoje žinoma tolydumo lygtis, sakanti, kad be galo mažame tūryjekrūvis keičiasi tik į tūrį įtekant ar iš jo ištekant srovei. Kitais žodžiais, tai klasiki-nis krūvio tvermės dėsnis, kuris, kaip matome, taip pat yra reliatyvumo teorijosišdava.
Į reliatyvistinęMaxwello lygtį (10.12) labai paprasta įvesti ir magnetinį krūvįbei su juo susijusią magnetinę srovę. Tiesa, iki šiol visos pastangos eksperimen-

246 10 skyrius
tiškai aptikti elementarų magnetinį krūvį arba taip vadinamą magnetinį mono-polį buvo bevaisės. Tuo tarpu teoriją juo papildyti labai paprasta. Pakanka prieįprastos elektrinės srovės tankio vektoriaus pridėti magnetinės srovės tankį IK ,kuris yra trivektorius,
∇F = J + IK . (10.19)
Srovę IK sukelia judantys magnetiniai krūviai. Kaip visada, suskaidę geomet-rinę daugybą į vidinę ir išorinę sandaugas, ∇F = ∇ · F + ∇ ∧ F , matome,kad trivektorinė dalis ∇ ∧ F = IK yra Poissono lygties magnetiniam krūviuianalogas. Taigi, magnetinio krūvio lygtis jau paruošta, belieka tik atrasti patįmagnetinį monopolį.
10.2 pavyzdys. Suskaidysime reliatyvistinę Maxwello lygtį ∇F = J į keturias tra-dicines Maxwello lygtis. Tai lengva padaryti perskeliant erdvėlaikį, t. y. lygtį reikia iškairės padauginti iš γ0, o F užrašyti per elektrinį ir magnetinį laukus (žr. 9.3 lentelę),
γ0∇F = (∂t +∇)(E + IB)
= ∇ ·E + I∇ ·B +∂E
∂t+ I
∂B
∂t+∇ ∧E + I∇ ∧B
= γ0J = ρ− J .
(10.20)
Išrinkę to paties rango narius iš abiejų pusių, juos sulyginę ir prisiminę divergencijos,gradiento ir rotoriaus apibrėžimus, gauname Maxwello lygtis (10.4a) ir (10.4b).
10.2. Lauko F savybės ir keturmatis potencialas
9 skyriuje Faraday’aus F bivekorių (9.78) buvom išskaidę į nelyginę ir lyginędalis,
E = (F − F)/2, B = (F + F)/2, kur F = γ0Fγ0 . (10.21)
Atspindėjus trimatę erdvę ¯ operacija, jos atitinkamai pakeičia ženklą arba ne.Matėme, kad elektrinis laukas E ≡ 1
2
ÄF − F
äapsupus jį γ0 vektoriais pakeičia
ženklą: E = γ0Eγ0 = 12γ0ÄF − γ0Fγ0
äγ0 = 1
2
Äγ0Fγ0 − F
ä= −1
2
ÄF −
γ0Fγ0ä= −E. Taigi, tokia transformacija pakeičia bazinių vektorių σi ženklą.
Kita vertus, narys IB = B = 12
ÄF + F
äatlikus trimatės erdvės inversiją ženklo
nepakeičia, kaip ir keturmačiai erdviškieji bivektoriai γiγj = Iσk.Abu skleidiniusnesunku gauti kitaip, apskaičiavusFaraday’jaus bivektoriaus
projekciją ir rejekciją į stebėtojo koordinačių sistemą γ0, t. y. F = Fγ0γ0 =(F · γ0)γ0 + (F ∧ γ0)γ0, kur
(F · γ0)γ0 = E1γ1γ0 +E2γ2γ0 +E3γ3γ0
= E1σ1 + E2σ2 +E3σ3
= E, ir
(10.22a)

Reliatyvistinė elektrodinamika 247
(F ∧ γ0)γ0 =ÄB1γ3γ2γ0 +B2γ1γ3γ0 + B3γ2γ1γ0
äγ0
= B1Iσ1 +B2Iσ2 +B3Iσ3
= B .(10.22b)
10.3 pavyzdys. Įsitikinkime, kad Faraday’aus bivektoriaus kvadratas F2 = (E+B)2yra reliatyvistinis invariantas. Lorentzo transformacija yra tiesiog sukimas Minkowskioerdvėje rotoriumi L, todėl pasuktam bivektoriuiF ′ = LF L galime rašyti
F ′2 = (LF L)(LF L) = LF2L = F2 . (10.23)
Paskutiniame žingsnyje pasinaudojome tuo, kad keturmačio bivektoriauskvadratas, kaipparodėme 9.7 pavyzdyje, visada yra tik skaliaro ir pseudoskaliaro suma, todėl komutuojasu rotoriumi L, kurį taip pat sudaro tik lyginio rango elementai.
Jei Faraday’aus bivektoriaus kvadratą apskaičiuosim išreikštai, gausim
F 2 = (E + IB)(E + IB) = E2 −B2 + 2IE ·B = α+ Iβ, (10.24)
kur α = E2 − B2 ir β = 2E · B. Todėl skaliaras E2 − B2 ir prie pseudo-vektoriaus stovintis koeficientas 2E ·B (irgi skaliaras) yra reliatyvistinės elekt-rodinamikos invariantai. Tuo tarpu anksčiau (7.62) formulėje rastas pilnos ener-gijos tankis (E2 +B2)/2 reliatyvumo teorijoje jau nėra invariantas, nes skirtin-gu greičiu judantys stebėtojai išmatuos skirtingas jos vertes. Nereliatyvistinėjeelektromagnetinio lauko teorijoje, kurią formulavome Cl3,0 algebroje, be laukoenergijos tankio, tvarus buvo ir Poyntingo vektorius, žr. (7.62) formulę. Pastara-sis Cl1,3 algebroje taip pat nėra tvarus, todėl darome išvadą, kad tvermės dėsniuslemia algebros, į kurią įdedame Maxwello lygtis, savybės. Eksperimentai rodo,kad elektromagnetinį lauką tiksliai aprašo reliatyvistinė Cl1,3 algebra.
10.4 pavyzdys. Įsitikinkime,kad dydisFF taip pat nėra Cl1,3 invariantas. Jį perskėlę,
FF = (E + IB)(−E + IB) = −(E2 +B2) + 2IE ∧B, (10.25)
matome, kad pirmasis narys yra nereliatyvistinis elektromagnetinės energijos tankis, oantrasis — Poyntingo vektorius. Tačiau antrasis narys nėra nei skaliaras, nei pseudoska-liaras, todėl nekomutuoja su rotoriumi (9.35), t. y. R(FF)R 6= FF . Tai reiškia, kaddydis FF negali būti invariantas.
Faraday’aus bivektorius sujungia eksperimentiškai matuojamus dydžius: triselektrinio ir tris magnetinio lauko sandus. Taigi, struktūros požiūriu turi 3+3 = 6nepriklausomus parametrus. Atrodytų, kad matematinio aprašymo daugiau su-paprastinti jau neįmanoma, tačiau taip nėra. Matematiškai gražesnę teoriją gau-sime, jei vietoje Faraday’aus lauko įvesime keturmatį potencialą. Šis potencialasreliatyvistinėje teorijoje vaidina net svarbesnį vaidmenį negu elektrinis ir mag-netinis laukai. Jo nauda paaiškėja pažvelgus į Maxwello lygties formą (10.12),

248 10 skyrius
kurios dešinėje pusėje stovi grynas vektorius. Tuo tarpu kairėje pusėje turimevektorinį operatorių, kuris veikdamas į bivektorių gali pagaminti ne tik vekto-rių, bet ir trivektorių, kurio dešinėje pusėje paprasčiausiai nėra. Šio nereikalingotrivektoriaus neatsiras, jei apibrėšime vektorinį lauką,
A = A0γ0 + A1γ1 +A2γ2 +A3γ3 , (10.26)
ir jį parinksime taip, kad operatoriaus∇ ir vektoriausA vidinė sandauga būtų nu-lis∇·A = 0. Šį keturmatį vektorinį laukąA pavadinsime keturmačiu potencialu.Faraday’aus lauko bivektorių per jį užrašysim tokiu būdu:
F = ∇A = ∇ ·A+∇∧A = ∇∧A . (10.27)
Kadangi ∇ ∧ ∇ = 0, tai ∇ ∧ F = ∇ ∧ ∇ ∧ A = 0, ir nereikalingas trivekto-rius nepasirodo. Maxwello lygties kairėje pusėje tada svarbi tik vidinė sandauga∇F = ∇ · F + ∇ ∧ F = ∇ · F = J , nes keturmatis vektorius yra tik dydis∇ · F . Tai reiškia, kad Maxwello lygties kairę pusę galime pakeisti keturmačiuvektoriniu potencialu ∇F = ∇∇A = ∇2A, o visą lygtį užrašyti pavidalu
∇2A = J. MAXWELLO LYGTIS Cl1,3 (10.28)
Ši lygtis teisinga tik vakuume. Nors diferencialinės lygties laipsnis ir vienetu iš-augo, tačiau kairėje pusėje dabar neatsiranda jokio papildomo trivektoriaus, nesoperatorius∇2 yra skaliaras. Kaina, kurią sumokame už pavidalo pakeitimą, yrabūtinybė užduoti kraštines sąlygas laukoA išvestinėms. Tačiau laimėjimas nepa-lyginamai svaresnis. Pirmiausia, žinoma, kvantinės lygtys su potencialu A įgyjapaprastesnį ir aiškesnį pavidalą. Bet nepalyginamai svarbiau tai, kad potencialasA nėra vien matematinė fikcija. Kvantinės mechanikos eksperimentai rodo, kadtai realus fizikinis laukas, kurio poveikį įmanoma užregistruoti. Pavyzdžiui, kei-čiant A galima erdvėje stumdyti elektronų sukurtą interferencinį paveikslą [49].
Išvesdami (10.28) lygtį panaudojome papildomą sąlygą∇·A = 0. Ji vadina-ma Lorentzo sąlyga, arba istoriškai susiformavusiu nevykusiu terminu „Lorentzokalibruote“ (angl. Lorentz gauge). Kadangi vidinė sandauga, kaip jau ne kar-tą akcentavome, neapibrėžia dydžių vienareikšmiškai, tai jei prie A pridėsimelaisvai parinktos skaliarinės funkcijos λ gradientą ∇λ, dėl savybės ∇ ∧ ∇ = 0rezultatas nepasikeis, t. y. galime rašyti
∇∧ (A+∇λ) = 0 . (10.29)
Ši vektoriausA savybė vadinama potencialokalibruotiniuinvariantiškumu. Tiks-lingai parinkus skaliarinę funkciją λ ji leidžia supaprastinti kvantmechaninį už-davinį arba jo kraštines sąlygas.

Reliatyvistinė elektrodinamika 249
10.5 pavyzdys. Išreiškime elektrinį ir magnetinį laukus per potencialą A. Tuo tikslupasinaudokime erdvėlaikio perskėlimo procedūra. Perskėlę keturmatį nabla ir vektorinįpotencialą turime
∇γ0 = ∇ · γ0 +∇ ∧ γ0 =∂
∂t+∇, (10.30)
γ0A(x) = γ0 · A(x) + γ0 ∧ A(x) = ϕ(x) −A(x), (10.31)
kur Minkowskio erdvės skaliaras γ0 · A(x) ir erdvinis bivektorius γ0 ∧ A(x) atitinkaįprastą skaliarinį ir vektorinį potencialą trimatėje Euklido erdvėje. Tada galime rašyti
∇A(x) = ∇γ0γ0A(x) =( ∂∂t
+∇
)(ϕ(x)−A(x)
)
=(− ∂A(x)
∂t+∇ϕ(x)
)+(∂ϕ∂t
−∇A(x)).
(10.32)
Iš Lorentzo sąlygos turime∇·A = ∂tϕ−∂xAx−∂yAy −∂zAz = ∂ϕ/∂t−∇ ·A = 0,todėl paskutinis apskliaustas (10.32) narys supaprastėja iki −∇ ∧ A = −[∇,A], kurišorinę sandaugą užrašėm kaip tradicinį komutatorių, [a, b] = 1
2(ab− ba). Taigi,
∇A(x) =(− ∂A(x)
∂t+∇ϕ(x)
)−∇ ∧A(x) . (10.33)
Pirmasis narys (vektorius) atitinka elektrinį, o antrasis (bivektorius) — magnetinį lauką,
E = −∂A(x)
∂t+∇ϕ(x), B = ∇ ∧A(x) . (10.34)
Užrašytą (10.34) pavidalu elektromagnetinį lauką galima sutikti beveik vi-suose nereliatyvistinės elektrodinamikos vadovėliuose. Tačiau juose skaliarinisϕ ir vektorinisA potencialai yra veikiau pagalbinė priemonė, kuri tik palengvinauždavinio sprendimą. Tuo tarpu reliatyvistinėje teorijoje keturmačio potencialovaidmuo iš esmės pasikeičia. Jis virsta vienu iš svarbiausiųdydžių, nes būtent ke-turmatis potencialas ir kalibruotės teorija (angl. gauge theory) įgalina nuosekliaiįvesti elektromagnetinę sąveiką į Diraco ir kitas reliatyvistines lygtis.
10.3. Elektrinio ir magnetinio lauko priklausomybė nuo greičio
Reliatyvumo teorija sako, kad elektrinio ir magnetinio laukų sandai Fara-dy’aus bivektoriuje F priklauso nuo inercinio stebėtojo greičio. Todėl skirtingistebėtojai juos išmatuos nevienodus. Suraskime šią priklausomybę.
Kaip žinom iš 9 skyriaus, į reliatyviu greičiu v stebėtojo γ0 atžvilgiu ju-dančio kito stebėtojo atskaitos sistemą galima peršokti atlikus Lorentzo stūmįrotoriumi R, kuris pasuka laikiškąjį γ0 vektorių erdvėlaikyje,
γ ′0 = Rγ0R . (10.35)

250 10 skyrius
Naujasis laikiškasis vektorius γ ′0 ≡ v = Rγ0R vadinamas savuoju greičiu. Jokryptis sutampa su tuo greičiu erdvėlaikyje judančio stebėtojo laiko ašimi. At-skirai paėmus nei elektrinis, nei magnetinis laukai nėra Minkowskio erdvės vek-toriai, o tuo pačiu ir reliatyvistiniai dydžiai. Reliatyvistinės elektrodinamikosobjektas yra tik Farady’aus bivektorius, į kurį įeina abu šie laukai. Todėl tik jisir transformuojasi pagal tą pačią (10.35) visiems Cl1,3 multivektoriams bendrątaisyklę,
F ′ = RF R . (10.36)
Tačiau žinant, kaip transformuojasi bendras Farady’aus bivektorius, jau nėra sun-ku surasti ir atskirų jo sandų, o kitame poskyryje ir klasikinės Lorentzo jėgostransformacijas.
Pirmiausia išveskime Farady’aus bivektorius sandų transformacijos formu-les. Tarkime, kad turime du stebėtojus, vienas kito atžvilgiu judančius reliatyviugreičiu v. Laikykime, kad pirmojo stebėtojo koordinačių sistemą nusako γ0, oantrojo (10.35) laikinis vektorius γ ′0. Tiek savasis greitis, v2 = 1, tiek ir roto-rius, RR = 1, yra normuoti. Domėsimės tik stūmio transformacijomis, todėl įrotorių (9.34) įtrauksim tik reliatyvų greitį v (9.65),
R = eαB/2, v = B thα . (10.37)
Kitaip tariant, rotoriuje paimame tik (9.34) formulės eksponentę su laikiškuojubivektoriumi2 B, kuris nusako grynojo stūmio vienetinę plokštumą B2 = 1 erd-vėlaikyje. Tuo pačiu jis užduoda ir reliatyvaus greičio kryptį3 v = v/|v| ≡ B.Tangentas parametro α, kurio vertė yra iš intervalo [0,∞), nusako normuotą įvienetą (c = 1) stebėtojo greičio modulį |v|.
Elektromagnetinį lauką išskaidykime į du sandus, F = F|| +F⊥. Vienas išjų yra projekcija (3.35), o kitas — rejekcija (3.38),
F|| = (F v+ vF )v/2 , ir F⊥ = (F v − vF )v/2 . (10.38)
Iš skaidinio išplaukia, kad lygiagretusis sandas F|| komutuoja, o statmenasis F⊥antikomutuoja su reliatyviu greičiu v,
vF|| = F||v, vF⊥ = −F⊥v . (10.39)
2Tikimės, kad skaitytojas laikiškojo bivektoriaus B nesupainios su magnetinės indukcijosbivektoriumi B.
3Primename, kad reliatyvus greitis yra matuojamas dydis, kuris buvo gautas perskėlus ke-turmatį greitį v stebėtojo (šiuo atveju stovinčio) sistemoje. Todėl kairėje pusėje jį žymime kaipEuklido vektorių, nors Minkowskio erdvėje, kaip rodo dešinė pusė, tai yra laikiškasis bivektorius.

Reliatyvistinė elektrodinamika 251
Išskleidę narį F⊥ = (F − vF v)/2 išreikštai gauname
F⊥ = (E − vEv)/2 + (B − vBv)/2 , (10.40)
kur pirmuose skliaustuose yra laikiškasis, o antruose — erdviškasis bivektorius.Iš komutavimo sąryšių (10.39) išplaukia, kad atliekant Lorentzo transformacijąlygiagretusis ir statmenasis sandai transformuojasi pagal taisykles
F ′||= RF||R = eαv/2F||e
−αv/2 = F|| , (10.41a)
F ′⊥= RF⊥R = eαv/2F⊥e
−αv/2 = eαv F⊥ = (chα + v shα)F⊥ . (10.41b)
Taigi, lygiagretusis sandas po stūmio nepasikeičia, kai tuo tarpu stūmiui stat-menas patiria Lorentzo transfomaciją. Tiesa, pasinaudojus (10.41b) bei (10.39)formulėmis nesunku patikrinti, kad statmenas greičiui v sandas išlieka to patiesilgio, t. y. jo kvadratas nepasikeičia (F ′
⊥)2 = F 2
⊥. Tai reiškia, kad statmenas re-liatyviam greičiui Faraday’aus bivektoriaus sandas, kaip ir pats bivektorius, yrateorijos invariantas.
Pasinaudoję (9.62) bei (9.63) išraiškomis, kuriose šviesos greitį laikome vie-netu c = 1, ir pritaikę tapatybę chα+v shα = γ+v|v|γ = (1+v)γ , statmenąjįsandą galime perrašyti glausčiau,
F ′⊥ = γ(1 + v)F⊥ . (10.42)
Taigi, Lorenzo transformacija tik padaugina F⊥ iš daugiklio γ(1 + v). Jei vek-torių v išskleisime bazėje v = v1σ1 + v2σ2 + v3σ3 ir panašiai, pagal (10.13)formulę, pasielgsime su elektriniuE bei magnetiniu B laukais, tada pasinaudoję(10.38) formule dviejų bivektorių sandaugą vF⊥ galėsime perrašyti tokiu pavi-dalu:vF⊥ =|v|(vE −Ev)/2 + |v|(vB − Bv)/2 = vE + vB − v ·E − v ∧ B
=− Iσ1(E2v3 −E3v2)− Iσ2(E3v1 −E1v3)− Iσ3(E1v2 − E2v1)
+ σ1(B2v3 −B3v2) + σ2(B3v1 − B1v3) + σ3(B1v2 −B2v1) ,
(10.43)
kurio paskutinės dvi eilutės parodo sandaugos skleidinį baziniais elementais.Gauta formulė leidžia išreikštai užrašyti, kaip po Lorentzo transformacijos pa-sikeičia elektrinis ir magnetinis laukai, nes tik šis narys juos ir permaišo. Mato-me, kad prie erdviškųjų bivektorių Iσi, kurie aprašo magnetinį lauką (žr. (10.22)formulę), dabar atsiranda elektrinio lauko sandai, ir atvirkščiai, prie laikiškųjųbi-vektorių σi prisideda nariai, aprašantys magnetinį lauką. Panagrinėkime atvejį,kai stebėtojas juda išilgai x ašies v‖σ1. Tada v = v1γ10 ir (10.43) virsta į
vF⊥ = v1(Iσ3E2 − Iσ2E3 + σ2B3 − σ3B2), (10.44)

252 10 skyrius
iš kur aiškiai matyti, kad transformuojami tik tie elektromagnetinio lauko sandai,kurie yra statmeni reliatyviam greičiui. Jei reliatyvus greitis v = 0, tada F ′
⊥ =F⊥, ir abu stebėtojai išmatuos tuos pačius elektrinį ir magnetinį laukus. Kaireliatyvus greitis mažas, Lorentzo daugiklį galima prilyginti vienetui, γ ≈ 1.Tada iš (10.42) matyti, kad reliatyvistiškai transformuotų laukų dydis yra tiesiogproporcingas reliatyvaus greičio moduliui |v|.
10.4. Elementaraus krūvio reliatyvistinės judėjimo trajektorijos
Klasikinėje elektrodinamikoje Lorentzo jėga nusako, kaip elektrinis ir mag-netinis laukai veikia mažais greičiais judantį taškinį krūvį. Išsiaiškinkime, kaipiš bendros Lorentzo transformacijos surasti šios jėgos atitikmenį reliatyvistinėjeelektrodinamikoje, kurią būtina žinoti, norint aprašyti įelektrintos reliatyvistinėsdalelės dinamiką.
10.4.1. Lorentzo jėga ir reliatyvistinio rotoriaus lygtis. Su Lorentzo jėgaCl3,0 algebroje,
FL = q(E + v ×B) = q(E − Iv ∧B) , (10.45)
kuri veikia nejudantį arba judantį v greičiu elektrinį krūvį q, jau esame susipa-žinę 5 skyriuje, (žr. (5.43) ir (5.41) formules). Priminsime, kad (10.45) formulėyra labai svarbi konstruojantelektroniniusprietaisus, kuriuoseelektromagnetiniulauku yra valdomas elektronų srautas. Ten pat esame užrašę ir antrąjį Newtonodėsnį (5.37), kurį čia perrašysime krūviui q, įvedę judesio kiekio p = mv pažy-mėjimą
p = FL . (10.46)
Abi formulės nustoja galioti, kai judėjimo greičiai pasidaro palyginami su šviesosgreičiu. Taigi, mūsų tikslas yra surasti (10.45) ir (10.46) formulių atitikmenisreliatyvistinėje Cl1,3 teorijoje.
Nagrinėsime reliatyvistinę kinematiką be galo mažo objekto (faktiškai taš-ko), kuriam galima taikyti pasaulinės trajektorijos x = x(τ) savoką. Tokio kūnotrajektoriją parametrizuoja savasis laikas τ . Manysime, kad objektą veikiantisLorentzo transformacijos rotoriusR = R(τ) taip pat priklauso tik nuo τ . Dalelėskinematiką aprašo rotorius, kuris kiekviename Minkowskio erdvės taške neju-dančio stebėtojo koordinačių sistemą pasuka taip, kad ji pradeda sutapti su begalo mažo judančio kūno koordinačių sistema, γ ′µ(τ) = R(τ)γµR(τ). Tiksliau,kadangi nagrinėjame ne pavidalą turintį kūną, o tašką, kuriam erdviniai posūkiai

Reliatyvistinė elektrodinamika 253
nėra svarbūs (pasukus tašką apie savo „centrą“ niekas nepasikeičia), pakanka nu-statyti tik rotorių R(τ), kuris sutapatina tik laiko vektorius,
dx
dτ= x = γ ′0(τ) = R(τ)γ0R(τ) . (10.47)
Ieškomasis rotorius kiekvienu laiko momentu turi išlikti normuotas R(τ)R(τ) =R(τ)R(τ) = 1. Sutrumpinę pažymėjimą R ≡ R(τ) ir išdiferencijavę šią lygybępagal judančio stebėtojo savąjį laiką (jo pasaulinės linijos parametrą) randame
γ ′0(τ)1= Rγ0R+ Rγ0
˙R
2= RRRγ0R − Rγ0RRR
= RRγ ′0(τ)− γ ′0(τ)RR =îRR, γ ′0(τ)
ó,
(10.48)
kur antrajame žingsnyje pasinaudojome tapatybe ˙R = −RRR, kurią nesunku
gauti išdiferencijavus rotoriaus normavimo sąlygą RR = 1. Kokiomis savybė-mis pasižymi (10.48) formulėje pasirodęs narys RR? Lengva matyti, kad ap-
grąžos operacija pakeičia tik jo ženklą:flÄRRä=
˜R˙R = R
Ä−RRR
ä= −RR.
Tai reiškia, kad apgrąžos operacija paveikus kairę ir dešinę (10.48) lygties puses,lygtis nepasikeis. Dabar prisiminkime (žr. (9.35) formulę), kad Cl1,3 algebrosrotorių sudaro tik lyginio rango elementai: skaliaras + bivektoriai + pseudoska-liaras. Skaliaras dešinėje (10.48) lygties pusėje susiprastina. PseudoskaliarasMinkowskio erdvėje antikomutuoja su vektoriais, todėl nesusiprastina, o duodatrivektorių Iγ0 − γ0I = −2γ123. Tačiau mes nagrinėjame per daug bendro pa-vidalo rotorių: tokį, kuris atlieka ir erdvinius sukimus, ir stūmius R = RαRβ(žr. (9.35) formulę). Rotorius Rβ suka tik erdvėje, todėl nagrinėjant taškinio kū-no kinematiką jo galima nepaisyti. Taigi, apsiriboję vien stūmio Rα rotoriumi,kurį sudaro tik skaliaras + bivektorius, matome, kad sandaugoje RαRα pseudo-skaliaro neatsiras. Vadinasi (10.48) išraiškoje taško kinematiką aprašančią laikofunkciją RαRα galime laikyti bivektoriumi. Tada pasinaudojęvektoriaus ir bivek-toriaus vidinės sandaugos formule (2.9) rezultatą (10.48) galime supaprastinti,
γ ′0(τ) = Ω · γ ′0(τ), kur Ω = 2RαRα . (10.49)
Dydis Ω = 2RαRα vadinamas sistemos sukimosi greičio bivektoriumi. Toliauindekso α nerašysime, tačiau būtina atsiminti, kad rotorių sandaugą RR laiko-me bivektoriumi, t. y. nenagrinėjame bendriausio atvejo. Kaip matome, Ω yrabetarpiškai susijęs su rotoriaus R lygtimi,
R =1
2ΩR . ROTORIAUS LYGTIS Cl1,3 (10.50)

254 10 skyrius
Tokiu būdu, uždavus bivektorių Ω, taško judėjimo kinematinis aprašymas galibūti pakeistas pirmos eilės diferencialine lygtimi rotoriui R = R(τ). Iš pirmožvilgsnio gali pasirodyti, kad nieko svarbaus nepadarėme — viso labo vienusnežinomuosius išreiškėm per kitus. Tačiau, kaip tuoj pamatysim, bivektorius Ωyra tiesiogiai susijęs su materialų tašką veikiančia jėga, t. y. taško dinamika.Uždavus veikiančią jėgą, o tuo pačiu Ω, ir išsprendus (10.50) lygtį rotoriaus Ratžvilgiu, jau nesunku apskaičiuoti keturmatį greitį x = v = Rγ0R ir suintegra-vus pastarąją bei perskėlus erdvėlaikį rasti dalelės judėjimo trajektoriją trimatėjeerdvėje. Beje, tokios formos rotoriaus lygtį (5.134) jau buvome gavę 5 skyriuje,kai nagrinėjome dalelių trajektorijas klasikinėjemechanikoje. Taigi, diferenciali-nės lygties rotoriui sukonstravimas ir jos sprendimas yra bendras metodas dalelėstrajektorijai aprašyti. Pažiūrėkime, kaip šis metodas veikia sprendžiant reliaty-vistinės įelektrintos dalelės judėjimo uždavinį.
Perrašykime (10.49) lygtį, γ ′0 pakeitę įprastu keturmačio greičio simboliu v,
v = Ω · v . (10.51)
Vietoje Ω įstatykime tokio pavidalo bivektorių Ω = qF/m, kur F yra Fara-day’aus laukas. Tada (10.51) lygtis virsta
mv = qF · v . (10.52)
Reliatyvumo teoriją studijavęs skaitytojas pastebės, kad ši formulė labai panaši įanalogišką tenzorinę formulę mvµ = qFµνvν , kur Fµν yra antisimetrinis antrorango elektromagnetinis tenzorius. Tai reiškia, kad Lorentzo jėgą reliatyvistinėjeelektrodinamikoje galima užrašyti tokiu gana paprastu bekoordinatiniu pavidalu:
FL = qF · v. LORENTZO JĖGA Cl1,3 (10.53)
Įsitikinkime, kad parinktas Ω tikrai duoda klasikinę (nereliatyvistinę) Lo-rentzo jėgą. Tuo tikslu padauginkime abi (10.52) puses iš γ0,
dÄmv(τ)γ0
ädτ
= qF · v(τ) γ0, (10.54)
kur masęm ir γ0 iš karto įkėlėme į diferencijavimo pagal savąjį judančio stebėtojolaiką τ operatorių. Pertvarkę kairiąją lygties pusę turime
dÄmv(τ)γ0
ädτ
=dt
dτ
d(mv(τ)γ0)
dt= γ
d(p(t)γ0)
dt= γÄE(t) + p(t)
ä, (10.55)
kur p žymi dalelės keturmatį judesio kiekį, kurį perskėlėme pasinaudoję (9.85)formule. Dabar, prisiminę (9.56) bei (9.58) apibrėžimus ir pritaikę formules

Reliatyvistinė elektrodinamika 255
vγ0 = (γ + γv) ir F = (E + B), dešinę (10.54) lygties pusę perskeliametokiu būdu:
qF · v(τ)γ0 =q
2
ÄFv − vF
äγ0 =
q
2
ÄF (γ + γv)− vγ0γ0Fγ0
ä
=qγ
2
Ä(E + IB)(1 + v)− (1 + v)γ0(E + B)γ0
ä
=qγ
2
Ä(E + IB)(1 + v)− (1 + v)(−E + IB)
ä
= qγÄE · v +E + IB ∧ v
ä.
(10.56)
Pasinaudoję (10.8) formule priešpaskutinėje eilutėje pabaigėme erdvėlaikio per-skėlimo procedūrą, o paskutinę eilutę perrašėme taip, kad rezultatą būtų galimainterpretuoti Cl3,0 algebros terminais. Sulyginę abi puses turime
γÄE(t) + p(t)
ä= qγ
ÄE · v +E − Iv ∧B
ä. (10.57)
Gavome dviejų rangų narius — skaliarus ir vektorius. Vektoriniai lygties nariaisutampa su (10.46), kurFL = q(E−Iv∧B), nariais. Skaliariniai nariai nerelia-tyvistinėje teorijoje nepasirodo. Juos galima interpretuoti kaip dalelės energijosE kitimo greitį (galią),
E(t) = qE · v, (10.58)
t. y. darbą, kurį atlieka elektrinis laukas per laiko vienetą greitindamas arba stab-dydamas įelektrintą dalelę.
10.4.2. Judėjimas pastoviameelektriniame ir magnetiniame lauke. ŠiuoatvejuF nepriklausonuo laiko, todėlΩ = qF/m yra pastovus ir rotoriaus (10.50)lygtį lengva išspręsti,
R(τ) = eqFτ/2mR0 , (10.59)
kur R0 yra rotoriaus vertė pradiniu laiko momentu. Dabar pasinaudokime tuo,kad Cl1,3 algebros bivektoriaus kvadratą, kaip įsitikinome 9.7 pavyzdyje, sudarotik skaliaras ir pseudoskaliaras. Todėl bivektorių F galima išreikšti per vienetinįbivektorių F ,
F = ηF + IξF , F 2 = (η2 − ξ2) + 2ηξI, (10.60)
kur η ir ξ yra skaliarai, kuriuos dar reikia rasti, ir F 2 = 1. Apskaičiavę multi-vektoriaus η+ Iξ atvirkštinį (η+ Iξ)−1 = (η− Iξ)/(η2+ ξ2) ir prisiminę, kadCl1,3 pseudoskaliaras komutuoja su lyginio rango elementais, iš (10.60) nesun-kiai randame vienetinį bivektorių,
F =η − Iξ
η2 + ξ2F = F η − Iξ
η2 + ξ2. (10.61)

256 10 skyrius
Tada, pasinaudoję (10.21) formule, elektrinį ir magnetinį laukus galime išreikštiper F ,
E =Äη(F − ¯F ) + Iξ(F +
¯F )ä/2 , (10.62a)
B = IB =Äη(F +
¯F ) + Iξ(F − ¯F )ä/2 . (10.62b)
Taigi, vienetinis bivektorius F nurodo laukų kryptį, o jų dydį nusako paramet-rai η ir ξ. Apskaičiavę elektrinio ir magnetinio laukų (10.62) vidinę sandaugągauname E · B = ηξ. Todėl bent vieną iš parametrų paėmus lygų nuliui laukaitampa ortogonalūs, E ⊥ B.
10.6 pavyzdys. Apskaičiuokime minėtą sandaugą E ·B. Įstatę (10.62) išraiškas gau-name
E ·B =ηξ
4(F − ¯F) · (F − ¯F) +
ηξ
4
(I(F +
¯F))·((−I)(F +
¯F))
+η2
4(F − F) ·
((−I)(F +
¯F))+ξ2
4
(I(F +
¯F))· (F − ¯F)
=ηξ
4
(2− F ¯F − ¯FF + 2 + F ¯F +
¯FF)= ηξ ,
(10.63)
kur pseudoskaliarą I iš vidinės sandaugos iškėlėme pagal (4.26) taisykles. Taip pat pasi-
naudojome savybe F2 = 1 ir tuo, kad ¯F ∧F = F ∧ ¯F , nes abu dauginamieji yra lyginiorango multivektoriai.
Norėdami surasti ryšį tarp F ir F abu bivektorius išskleiskime baziniais bi-vektoriais,
F = a1σ1 + a2σ2 + a3σ3 + b1Iσ1 + b2Iσ2 + b3Iσ3 , (10.64a)
F = E1σ1 +E2σ2 + E3σ3 + B1Iσ1 + B2Iσ2 +B3Iσ3 . (10.64b)
Tada, pasinaudoję (10.60) sąryšiu, nesunkiai išreiškiame vienus sandus per kitus,
ai =Eiη +Biξ
η2 + ξ2, bi =
Biη − Eiξ
η2 + ξ2, (10.65)
kur η ir ξ surandame iš lygčių η2 − ξ2 = 〈F 2〉 ir 2ηξI = 〈F 2〉4 .Daugelį skaičiavimų paprasčiau ir lengviau atlikti bekoordinatiniu metodu.
Pavyzdžiui, vienetinį bivektorių pakėlus bet kuriuo laipsniu n, gauname arbaFn = 1, arba Fn = F , priklausomai nuo to, ar n yra lyginis, ar nelyginis. Būtentdėl to eksponentę nuo vienetinio bivektoriaus labai paprastai galime užrašyti perhiperbolines ir trigonometrines funkcijas,
esF = ch s + F sh s, esIF = cos s+ IF sin s , (10.66)
kur s yra skaliaras. Aišku, jei bivektorius nėra vienetinis, šios formulės netinka.

Reliatyvistinė elektrodinamika 257
Kaip rodo (10.66) formulės, vienetinė plokštuma F yra patogi sukimams tieklaikiškoje, tiek erdviškoje plokštumose aprašyti. Kadangi F ir IF komutuoja,rotoriaus (10.59) eksponentę galima suskaidyti į atskirų eksponenčių sandaugą,
R = eq
2mηFτ e
q2m
ξIFτR0 . (10.67)
Jei žinom bivektorinę sukimo plokštumą, tai visada patogu vektorių a, kurį nori-me pasukti, suskaidyti į dvi dalis — statmeną ir lygiagrečią sukimo plokštumai.Suskaidžius vektorių a = a‖ + a⊥, sukimo formulėje R a R bus galima perkeltirotoriaus eksponentes į vieną pusę kiekvienam iš sandų atskirai. Šia gudrybe mesne kartą naudojomės ir anksčiau. Todėl pradinį dalelės greitį v0 suskaidykime įvienetinio bivektoriaus F plokštumai statmeną ir lygiagretų sandus,
v0 = F 2v0 = F(F · v0) + F (F ∧ v0) ≡ v0‖ + v0⊥ . (10.68)
Kadangi ˜F = −F ir IF =˜F I = −IF , tai laiko momentu τ greitis bus
x = v = Rγ0R = eq
2mηFτ e
q
2mξIFτ (v0‖ + v0⊥)e
− q
2mξIFτ e−
q
2mηFτ . (10.69)
Dabar išreikštai pasinaudoję sandų savybėmis v0‖F = −Fv0‖ ir v0⊥F = Fv0⊥per juos perkelkime abi eksponentes. Suprastinę gauname
x = eη′Fτv0‖ + eξ
′IFτv0⊥ , (10.70)
kur η′ = qη/m ir ξ′ = qξ/m. Suintegravę pagal laiką, randam dalelės pasaulinėslinijos erdvėlaikyje išraišką,
x− x0 =eη
′Fτ − 1
η′F · v0 −
eξ′IFτ − 1
ξ′(IF) · v0 . (10.71)
Tai ir yra mūsų uždavinio atsakymas. Kai τ = 0, formulė atsižvelgia į sąlygą, kadpradiniu laiko momentu dalelė buvo erdvėlaikio taške x0. Iš (10.71) matome, kadpasaulinė trajektorija turi tiek osciliuojančius, tiek ir neosciliuojančius narius.Tai matysime aiškiau, jei pasinaudoję (10.66) formulėmis taško x0 = 0 aplinkojeišskleisime eksponentes,
x =ch η′τ + F sh η′τ − 1
η′F · v0 −
cos ξ′τ + IF sin ξ′τ − 1
ξ′(IF) · v0
=ch η′τ − 1
η′F · v0 +
sh η′τη′
F (F · v0)
− cos ξ′τ − 1
ξ′(IF) · v0 −
sin ξ′τξ′
IFÄ(IF) · v0
ä.
(10.72)
Kiekvienas iš sumos narių yra vektorius.

258 10 skyrius
a) b)
10.1 pav. a) Įelektrintos dalelės reliatyvaus greičio priklausomybė nuo laiko,kai laiko momentu τ = 0 greičiu v01 = 0 ir 0,4 bei 0,7 judančią dalelę pradedaveikti tos pačios krypties elektrinis laukas. b) Dalelės trajektorija plokštumojeσ1σ2, kai pradiniu momentu stovinčią dalelę vienu metu ima veikti elektrinisE‖σ1 ir magnetinis B‖σ3 laukai
10.1 paveikslas vaizduoja keletą charakteringų (10.72) sprendinių. 10.1a pav.rodo, kaip laikui bėgant auga dalelės reliatyvus greitis vr = x/t = x∧γ0/x ·γ0,kai dalelę veikia greitinantis elektrinis laukas E = E1σ1, o magnetinio laukonėra, B = 0. Šią laukų konfigūraciją atitinka parametrų vertės η = E1, ξ = 0,a1 = 1, a2 = a3 = 0, bk = 0. Kiti fiktyvios dalelės q = m = 1 greičiosandai pradiniu laiko momentu buvo lygūs nuliui, v02 = v03 = 0. Perskėlę erd-vėlaikį iš (10.72) formulės gauname laiko (skaliaro) ir koordinatės (vektoriaus)priklausomybę nuo savojo laiko,
t = x · γ0 = (−v01 + v01 ch η′τ + sh η′τ)/η′ , (10.73a)
x = x ∧ γ0 = σ1(−1 + ch η′τ + v01 sh η′τ)/η′ . (10.73b)
Greitis pradiniu laiko momentu yra vr(0) = limτ→0x∧γ0x·γ0 = v01σ1. Riboje
τ → ∞, t. y. praėjus be galo ilgam laiko tarpui, greitis tampa lygus vr(∞) =limτ→∞
x∧γ0x·γ0 = σ1 (žr. 9.2 paveikslą). Kitaip tariant, jo dydis prilygsta šviesos
greičiui. Taigi, pastovus elektrinis laukas visą laiką greitina dalelę, bet jos greitisniekada neviršija šviesos greičio, |vr| < 1.
10.1b paveikslas vaizduoja dalelės trajektorijąσ1–σ2 plokštumoje, kai ją vei-kia tarpusavyje statmeni elektrinis E = E1σ1 ir magnetinis B = B3σ3 laukai.Šią laukų konfigūraciją atitinka parametrai a1 = a2 = 0, a3 = B3/
»B2
3 − E21,
b1 = −E1/»B2
3 −E21 , b2 = b3 = 0, ξ =
»B2
3 − E21 ir η = 0. Kai dalelė pra-
diniu laiko momentu stovi, v0 = γ0, perskėlę erdvėlaikį gauname jos trajektorijostrimatėje erdvėje parametrinę išraišką,
x(τ) = x ∧ γ0 = σ1
E1(1− cos»B2
3 −E21 τ)
B23 − E2
1
+ σ2
B3E1
Äsin»B2
3 − E21 τ − τ
»B2
3 −E21
ä(B2
3 −E21)
3/2.
(10.74)

Reliatyvistinė elektrodinamika 259
Kaip matome iš 10.1b pav., elektronas, panašiai kaip ir klasikiniu atveju, osci-liuodamas ir stabčiodamas kryptingai juda išilgai σ2 ašies, t. y. elektronas vidu-tiniškai juda statmenai tiek elektriniam, tiek magnetiniam laukui.
10.5. Plokščia elektromagnetinė banga ir jos poliarizacija
Vakuume, kur nėra laisvų krūvių, Maxwello lygties ∇F = 0 sprendinys yraplokščia elektromagnetinė banga,
F = F0eIk·x . (10.75)
Amplitudė F0 čia žymi pastovų bivektorių, kuris, kaip pamatysim vėliau, nu-sako ne tik bangos dydį, bet ir bangos poliarizaciją. Eksponentėje esanti erd-vėlaikio įvykio x = tγ0 + x1γ1 + x2γ2 + x3γ3 ir bangos vektoriaus k =ωγ0 + k1γ1 + k2γ2 + k3γ3 vidinė sandauga k · x = ωt− (k1x1 + k2x2 + k3x3)labai primena tradicinę plokščios bangos kompleksinę eksponentę eik·x, kur pa-ryškintas šriftas primena, kad turime mintyje trimačius vektorius. Kaip matomeiš (10.75) formulės, dabar eksponentėje vietoje menamo vieneto i stovi pseu-doskaliaras I , kurio kvadratas taip pat lygus −1. Mes domėsimės šešis sandusturinčios amplitudės F0 savybėmis. Įstatę (10.75) bangą į Maxwello lygtį gau-name
∇F = ∇(F0eIk·x) = ∇(eIk·xF0) = IkF = 0 . (10.76)
Šią algebrinę sąlygą galime pakeisti jai ekvivalentiška,
kF0 = 0 , (10.77)
nes eksponentėniekada nėra lygi nuliui. Iš kairės padauginę (10.77) iš k gaunamek2F0 = 0. Taigi, norint gauti nenulinės amplitudės bangą skaliaras turi paten-kinti sąlygą k2 = 0 arba k2 = kγ0γ0k = (ω + k)(ω − k) = ω2 − k2 = 0, iškurios išplaukia gerai žinomas šviesos dispersijos dėsnis (dimensiniais vienetais)
ω = ±c|k| . (10.78)
Sąlygą (10.77) automatiškai patenkinsime, jei tarsime, kad bivektorių F0 gali-ma užrašyti pavidalu F0 = k ∧ n, kur nežinomas vektorius n yra ortogonalusketurmačiam bangos vektoriui, k · n = 0. Parinkus tokį vektorių išorinė k ir nsandauga sutaps su geometrine,
F0 = k ∧ n = kn . (10.79)
Sąlyga (10.79) nepasikeis, jei prie pasirinkto n pridėsime bet kokį kitą vektorių,lygiagretų vektoriui k,
F0 = k(n+ λk) = kn + λk2 = k ∧ n , (10.80)

260 10 skyrius
nes šviesiškojo vektoriaus kvadratas lygus nuliui, k2 = 0. Šia vektoriaus n pa-rinkimo laisve pasinaudosime, kai norėsime šviesos poliarizaciją padaryti orto-gonalią banginiam vektoriui pasirinktoje inercinėje sistemoje.
Paimkime dažnio ω bangą, kuri sklinda γ3 ašies kryptimi. Tokios bangosbanginis vektorius yra k = ωγ0 + k3γ3, o dispersija ω = k3, todėl
k = ω(γ0 + γ3), ir k · x = ω(t− z). (10.81)
Parinkę pradinę bangos fazę, kuri iš eksponentės skleidinio palieka tik kosinusą,ir plokštumoje γ1–γ2 paėmę statmeną bangos sklidimo krypčiai γ3 vektorių n =−α1γ1 − α2γ2, kur α1 ir α2 žymi laisvus parametrus, į kuriuos glaustumo dėleiįtraukėme ir dažnį ω, galim rašyti
F = kn cos(k · x) = −(γ0 + γ3)γ0γ0(α1γ1 + α2γ2) cos(k · x)= (1 + σ3)(α1σ1 + α2σ2) cos(k · x) ≡ F0 cos(k · x) .
(10.82)
Perskėlę (10.82) bivektorių stebėtojo γ0 sistemoje surandam elektrinio ir magne-tinio laukų amplitudes,
E0 = (F0 − γ0F0γ0)/2 = α1σ1 + α2σ2 , (10.83a)
IB0 = (F0 + γ0F0γ0/2 = α1Iσ2 − α2Iσ1 . (10.83b)
Kadangi vidinė sandauga E0 · B0 = 0, tai amplitudės E0 ir B0 lygtyje (10.82)yra viena kitai statmenos.
Jei pradinę bangos fazę paimtume bet kokią, tai (10.82) lygtyje prie F darturėtume pridėti narį su sinuso funkcija, kuri taip pat turės du laisvai parenka-mus skaliarinius parametrus β1 ir β2. Todėl pačią bendriausią elektromagnetiniolauko poliarizaciją nusako keturių realių parametrų lygtis,
F = (1+σ3)Ä(α1σ1+α2σ2) cos(k ·x)+(β1σ1+β2σ2) sin(k ·x)
ä. (10.84)
Daugelį fizikinių uždavinių lengviau suformuluoti ir išspręsti nagrinėjant nebet kokią poliarizaciją, o pasirinkus dvi apskritimines, prieš ir pagal laikrodžiorodyklę orientuotas bazines būsenas. Tokias būsenas gausime (10.84) formulėjeparinkę tam tikras pastoviųjų αi ir βi vertes, būtent, α1 = −β2 = E0 ir α2 =β1 = 0, kur E0 žymi elektrinio lauko amplitudę. Tuomet elektromagnetiniolauko bivektorius įgyja pavidalą
F (−) = E0(1 + σ3)Äσ1 cos(k · x)− σ2 sin(k · x)
ä
= E0(1 + σ3)σ1e−Iσ3k·x,
(10.85)
kuris aprašo besisukančios pagal laikrodžio rodyklę poliarizacijos bangą. Pa-žvelgę į (10.22) matome, kad sklindant tokiai bangai E(x, t) = (F (−) · γ0)γ0 =

Reliatyvistinė elektrodinamika 261
E0
Äσ1 cos(k ·x)−σ2 sin(k ·x)
ä, kur k ·x = ωt−k3x3, vektoriaus galas trimatėje
erdvėje (t = 0) sukasi apie bangos sklidimo krypties vektorių σ3 kaip dešininisįsukamas medvaržtis. Priešingos poliarizacijos (besisukančios prieš laikrodžiorodyklę) lauką gausime pakeitę eksponentės rodiklio ženklą į priešingą,
F (+) = E0(1 + σ3)σ1eIσ3k·x . (10.86)
Apskritiminės poliarizacijos bangos yra ortogonalios ta prasme, kad jų geomet-rinė sandauga lygi nuliui, F (−)F (+) = 0. Kitokių poliarizacijų bangas gausimesudėję šių priešingų poliarizacijų bangas, padaugintas iš įvairių svorių,
F = lF (+) + rF (−). (10.87)
Pavyzdžiui, kai l = r = 1/2, gauname tiesiškai σ1 kryptimi poliarizuotą bangą.Verta atkreipti dėmesį į visose su poliarizacija susijusiose formulėse pasiro-
dantį daugiklį (1+σ3), kuriam būdinga viena svarbi savybė, o būtent, padauginęjį iš 1/2 ir pakėlę kvadratu matome, kad daugiklio kvadratas lygus jam pačiam,
(12(1 + σ3)
)2=
1
4
Ä1 + 2σ3 + σ2
3
ä=
1
2(1 + σ3) . (10.88)
Iš 4 skyriaus žinome, kad šia savybe pasižymintys multivektoriai neturi atvirkš-tinio ir vadinami idempotentiniais. Jie vaidina svarbų vaidmenį klasifikuojantCliffordo algebras bei konstruojant įvairius projekcinius operatorius. Minkow-skio idempotentai betarpiškai susiję su nuliniais (šviesiškaisiais) vektoriais. Pa-vyzdžiui, mūsų atveju multivektorius 1 + σ3 atsirado iš vektoriaus γ0 + γ3, šįpadauginus iš dešinės iš γ0. Tačiau γ0 + γ3 yra šviesiškasis vektorius, kuriokvadratas yra nulis, (γ0 + γ3)
2 = 0.Šiame ir 7 skyriuje bėgančias bangas aprašėme eksponentėmis su pseudo-
skaliaru I laipsnio rodiklyje. Kadangi I daug kuo panašus į menamąjį viene-tą i =
√−1, tai eksponentė su I rodiklyje yra labai patogi atliekant skaičiavi-
mus. Tačiau Cl1,3 algebros idempotentiniomultivektoriaus savybė (1+σ3)σ3 =σ3+σ2
3 = 1+σ3 leidžia pseudoskaliarą eksponentėje pakeisti bivektoriumi Iσ3.Tuo nesunku įsitikinti atlikus šiuos pertvarkymus:
(1 + σ3)eIσ3ϕ = (1 + σ3)(cosϕ+ Iσ3 sinϕ)
= (1 + σ3) cosϕ+ I(1 + σ3)σ3 sinϕ
= (1 + σ3)(cosϕ+ I sinϕ) = (1 + σ3)eIϕ .
(10.89)
Taigi, eIσ3ϕ ∼= eIϕ, ir tuo pasinaudosime kitame skyriuje, skirtame reliatyvisti-niams spinoriams.

262 10 skyrius
10.7 pavyzdys. Comptono sklaida. Iki šiol į elektromagnetinį lauką žiūrėjom kaip įbangą. Tačiau kvantinė elektrodinamika elektromagnetinį lauką interpretuoja ir kaip da-lelių — fotonų, kurių trajektorijos driekiasi ant šviesos kūgio, srautą. de Broglie bangosir dalelės dualumo principas tvirtina, kad kiekvieną bangą galima įsivaizduoti kaip dale-lę, turinčią tam tikrą energiją ir impulsą. Ir atvirkščiai, kiekvieną dalelę galima aprašytibanga, kurią charakterizuoja jos dažnis ir banginis vektorius. Todėl fotonų kaip daleliųenergiją galime apskaičiuoti bangos dažnį ir vektorių padauginę iš Plancko pastoviosios,E = ~ω ir p = ~k. Tai, kad fotonas iš tiesų turi impulsą, rodo Comptono sklaida, kuriyra ne kas kita, kaip tamprus elektrono ir fotono susidūrimas. Po tokio susidūrimo kiek-vienos iš dalelių kryptis ir energija pasikeičia, tačiau suminis abiejų dalelių impulsas irenergija, kaip to reikalauja tvermės dėsniai, nepasikeičia.
Fotonų srautui galioja tas pats dispersijos dėsnis, kaip ir bangai (žr. (9.3) lentelę),todėl galime rašyti ~2k2 = ~2(ω2 − k2) = 0. Comptono sklaidos formulę išvesime išketurmačio impulso tvermės dėsnio,
~kin + pe = ~kout + qe , (10.90)
kur ~kin ir ~kout žymi atitinkamai krintančio ir išsklaidyto fotono, o pe ir qe krintančio irišsklaidyto elektrono keturmačius impulsus. Manysime, kad prieš susidūrimą elektronasbuvo ramybės būsenoje, o fotonas sklido γ3 kryptimi. Po susidūrimo elektronas buvoišsklaidytas γ2γ3 plokštumoje. Tai leidžia užrašyti tokias reliatyvistines lygtis:
1) elektronas nejuda, todėl pe = mecγ0,2) γ3 kryptimi sklindančio fotono keturmatis impulsas yra ~kin = ~(ωγ0 +
|kin|γ3) = ~|kin|(γ0 + γ3),3) fotonas išsklaidomasγ2−γ3 plokštumojeθ kampu, todėl~kout = ~|kout|
(γ0+
sin θγ2 + cos θγ3),
4) po sklaidos elektrono vidinė būsena nepasikeičia, t. y. jis ir pasilieka elektronuq2e = m2
ec2.
Keturmačio impulso tvermės formulėje (10.90) narį ~kout perkėlę į kairę pusę ir abi pusespakėlę kvadratu sudarome skaliarinę lygtį išsklaidyto fotono bangos skaičiui |kout|,
(~kin + pe − ~kout)2 = q2e . (10.91)
Išsprendę ją |kout| atžvilgiu randame, kaip išsklaidyto fotono energija priklauso nuo|kin|, elektrono, su kuriuo jis susidūrė, masės me ir sklaidos kampo θ,
|kout| =|kin|
1 + λc|kin|(1− cos θ). (10.92)
Formulėje λc = ~/mec = 3,86159× 10−11 cm žymi Comptono bangos ilgį. Po susi-dūrimo fotono bangos ilgis yra lygus λout = 2π
|kout| .
10.6. Elektromagnetinį lauką spinduliuojantis krūvis⋆
Nagrinėdami įelektrintos dalelės judėjimą manėme, kad dalelė judėjo išori-niame lauke, kuriam pačios dalelės judėjimas jokios įtakos neturėjo. Tačiau gerai

Reliatyvistinė elektrodinamika 263
10.2 pav. Taškinio krūviotrajektorija x0(τ ) ir šviesoskūgiai (punktyrinės linijos)stebėtojo koordinačių siste-moje. Keturmačių vektoriųskirtumasX = x−x0(τ ) yravėluojantis nulinis vektorius
žinoma, kad su pagreičiu judantis elektrinis krūvisspinduliuoja elektromagnetines bangas, t. y. patskuria EM lauką. Panagrinėkime šį klausimą pla-čiau ir išsiaiškinkime, kokį gi lauką generuoja supagreičiu judantis taškinis krūvis.
Tegu, kaip pavaizduota 10.2 paveiksle, krūvisq juda pasauline trajektorija x0(τ), kur τ žymi josavąjį laiką, o stebėtojas erdvėlaikio taške x regist-ruoja šviesos signalą, kurį krūvis išspinduliavo bū-damas savo trajektorijos taške x0(τ). Aišku, kadkrūvio išspinduliuotas signalas kerta stebėtojo, ku-rį visada laikysime stovinčiu ir kurio koordinačiųsistemoje atliksime skaičiavimus, vertikalią pasau-linę liniją išilgai šviesos kūgio linijos (žr. tekstą popiešiniu 213 psl.). Kitaip tariant, krūvio trajekto-rijos tašką x0(τ) ir stebėtoją x jungia šviesiškasisvektoriusX ,
X = x− x0(τ), (10.93)
kurio kvadratas lygus nuliui,
X2 = 0 . (10.94)
Reliatyvistinėje elektrodinamikoje X yra vadinamas vėliuojančiu nuliniu vek-toriumi, nes krūvis lauką išspinduliuoja anksčiau (piešinyje jis pavaizduotas že-miau) negu jį užregistruoja stebėtojas. Kaip matyti iš 10.2 paveikslo, kiekvienamtaškui, kuriame tuo metu yra stebėtojas x, atitinka vienintelė savojo laiko vertė,τ tokia, kad X2 = 0. Šis abipusis vienareikšmiškumas leidžia apversti funkcinępriklausomybę ir laikyti, kad taškinio krūvio savasis laikas τ yra stebėtojo taškox funkcija, τ = τ(x). Taigi, apibrėžėme skaliarinę funkciją, kurios argumentasyra keturmatis vektorius ir kurios mums prireiks sprendžiant uždavinį.
Apskaičiuokime Liénardo ir Wiecherto potencialą, kuris nusako, kaip kei-čiasi judančio taškinio krūvio q kuriamas keturmatis elektromagnetinio laukopotencialas A = (A0,A), kurį stebėtojas registruoja erdvėlaikio taške x. Jeikrūvis stebėtojo atžvilgiu nejuda, Liénardo ir Wiecherto potencialas turi sutaptisu gerai žinomu klasikiniu Coulombo dėsniu, kuris Cl1,3 algebros erdvėlaikyje,kai vakuumo skvarba ε0 = 1, užrašomas formule
A =q
4π
γ0|r| =
q
4π
γ0X · γ0
. (10.95)

264 10 skyrius
Krūvį ir stebėtoją joje skiria trimatis atstumas |r| = X ·γ0. Lengva matyti, kad poperskėlimo skaliarinė (10.95) dalis A · γ0 duoda įprastinę Coulombo potencialoišraišką q/(4π|r|). Nejudantį stebėtojo koordinačių sistemoje krūvį parametri-zuoja pasaulinė linija x0(τ) = τγ0 = (t− |r|)γ0, kurioje laikome, kad c = 1.Kai |r| = 0, tada t = τ . Tačiau kai tarp krūvio ir stebėtojo yra atstumas |r|, dėlbaigtinio šviesos greičio laiko momentai bus pasislinkę t = τ + |r|. Stebėtojoatžvilgiu nejudančiam krūviui tada galime rašyti
X · γ0 = x · γ0 − x0(τ) · γ0 = t− τ = t− (t− |r|) = |r| . (10.96)
Todėl potencialas (10.95), kaip ir turi būti, krenta kaip |r|−1.Kaip pasikeičia Liénardo ir Wiecherto potencialas krūviui judant? Pažvel-
gę į Coulombo formulę (10.95), joje matome du γ0 vektorius, būdingus sto-vinčiam šaltiniui. Natūralu tikėtis, kad pakeitę juos keturmačiu greičiu v =∂x0/∂τ = x0, kurio prasmė yra krūvio pasaulinės trajektorijos liestinė, gausimejudančio krūvio arba Liénardo ir Wiecherto keturmatį potencialą,
A =q
4π
v
X · v . (10.97)
Žinoma, greitis (10.97) formulėje atsiranda dėl pasukimo erdvėlaikyje, kuris ba-zinį laiko vektorių γ0 Coulombo formulėje (10.95) pagal transformacijų (9.49) ir(9.52) taisykles perveda į v. Laikykime, kad šis greitis nėra pastovus, o priklausonuo savojo laiko, v = v(τ), t. y. pasukimo kampas keičiasi kiekviename pasau-linės trajektorijos, kurią nusako parametras τ , taške. Tradicinėje elektrodinami-koje Liénardo ir Wiecherto potencialas gaunamas iš banginės lygties ∇2A = J .Tam pasitelkiamosvėluojančios Greeno funkcijos [50], todėl jį išvesti yra kur kassudėtingiau.
Judančio krūvio Faraday’aus lauką gausime keturmačiu nabla (10.27) ope-ratoriumi paveikę Liénardo ir Wiecherto potencialą (10.97), F = ∇A. Todėlformulėse atsiras antra išvestinė pagal laiką (pagreitis). Diferencijuodami nau-dosime 6 skyriaus formules, kurias taikant svarbu nepamiršti, kad keturmačiame∇ operatoriuje baziniai vektoriai prie dalinių išvestinių ir pačios išvestinės veikianepriklausomai. Todėl, kaip rodo žemiau pateiktas pavyzdys,∇ nekomutuojanetsu pastoviais vektoriais, nors joje esančios išvestinės jų ir neveikia.
10.8 pavyzdys. Įsitikinkite, kad jei a yra pastovus vektorius, tai ∇ax = −2a, bet∇xa = 4a. Primename, kad taškų virš operatoriaus ∇ ir diferencijuojamo dydžio po-ra tik parodo, kurį iš narių diferencialinis operatorius veikia. Šių taškų poros nereiktųpainioti su diferencijavimu pagal parametrą (laiką), kuris taip pat žymimas tašku, tačiauveikia vienas. Diferencijavimas pagal parametrą yra skaliarinė operacija, todėl taško-partnerio jai nereikia.

Reliatyvistinė elektrodinamika 265
Pirmiausia išdiferencijuokime lygtįX2 = 0,
0 = ∇X2 = ∇XX + ∇XX = (γν∂νX)X + γνX∂νX
= γνÄ(∂νX)X +X(∂νX)
ä= γν2
Ä(∂νX) ·X
ä.
(10.98)
Kadangi ∂µX = ∂µx− ∂µx0, galime rašyti
∇X2 = 2∇(x ·X)− 2∇τÄ(∂τx0(τ)) ·X
ä, (10.99)
kur pasinaudojome sudėtinės funkcijos diferencijavimo taisykle,
∇ = γν∂ν = γν(∂ντ)Ä ∂∂τ
ä≡ (∇τ)(∂τ), (10.100)
kurią galima taikyti tik tada, jei τ yra skaliaras (šiuo atveju taip ir yra, nes τyra pasaulinės linijos parametras). Taisyklė (10.100) judančio krūvio išvestinesstovinčio stebėtojo sistemoje pakeičia išvestinėmis savoje judančio krūvio ko-ordinačių sistemoje. Priminsime, kad gradientas ∇τ = γν(∂ντ) jau yra vek-torius, todėl jo taip paprastai iškelti iš išraiškų negalima. Pastebėję, kad dy-dis ∂τx0(τ) = v yra krūvio greitis ir pasinaudoję tapatybe (žr. 10.8 pavyzdį)∇(x ·X) = 1
2∇(Xx+ xX) = 12 (−2X + 4X) = X , turim
0 = ∇X2 = 2ÄX −∇τ(v ·X)
ä. (10.101)
Iš čia išreikštai surandame gradiento ∇τ pavidalą,
∇τ =X
X · v . (10.102)
Šis laukas neturi fizikinės interpretacijos, todėl vadinamas „papildančiu lauku“arba „šmėkliniu lauku“ (angl. adjunct field, ghost field), tačiau jo mums prireiksieškant fizikinę prasmę turinčio Faraday’aus lauko. Formulė (10.102) rodo, kadτ gradientas yra nukreiptas išilgai vektoriausX . Pažvelgę į Liénardo ir Wiecher-to potencialo išraišką (10.97) matome, kad norėdami surasti lauką F = ∇A,pirmiausia turime išmokti apskaičiuoti gradientą
∇(X · v) = ∇(X · v) + ∇(X · v) . (10.103)
Pertvarkę pirmąjį narį turime ∇(X · v) = ∇Ä(x − x0) · v
ä= v − ∇(x0 · v) =
v−∇τ(∂τx0·v) = v−∇τv2 = v−∇τ , kur pasinaudojomeformulėmis (10.100),v2 = 1 ir ∇(x · v) = v. Vėlgi turėdami mintyje, kad τ yra skaliarinis laukas,galime pasinaudoti (10.100) formule ir antrajį narį perrašyti pavidalu ∇(X · v) =∇τ ∂τ (X · v) = ∇τ(X · (∂τv)). Kadangi keturmatis pagreitis yra keturmačio

266 10 skyrius
greičio išvestinė pagal savąjį laiką, v = ∂τv, tai (10.103) išraišką galime užrašytitokiu patogiu pavidalu:
∇(X · v) = v −∇τ +∇τX · v
= v − X
X · v +X
X · vX · v .(10.104)
Iš (10.102) taip pat išplaukia, kad ∇v = ∇τ v = Xv¿(X · v). Pasinaudo-
ję šiuo rezultatu, o taip pat formulėmis (10.97) ir (10.104), jau galime užrašytiFaraday’aus bivektoriaus išraišką,
F = ∇A =q
4π
Ç∇vX · v − 1
(X · v)2∇(X · v)vå
=q
4π
ÇXv
(X · v)2 − 1
(X · v)2 − (X(X · v)−X)v
(X · v)3å
=q
4π
ÇX ∧ v(X · v)2 +
X ∧ v −X · v X ∧ v(X · v)3
å.
(10.105)
Paskutiniame žingsnyje geometrinę daugybą pakeitėme vidinėmis ir išorinėmissandaugomis. Kaip matome iš paskutinės eilutės, atsakymas yra grynasis bivek-torius. Tai reiškia, kad ∇ · A = 0, todėl laukas F yra Lorentzo kalibruotėje.Gautą išraišką dar galima pertvarkyti pasinaudojus tapatybėmisX2 = 0 ir
X · v X ∧ v −X · v X ∧ v = −XÄX · (v ∧ v)
ä=
1
2Xv ∧ vX , (10.106)
kurią nesunku patikrinti pirmiausia pritaikius (4.63) formulę, o po to geometrinęsandaugą išskaidžius į vidinę ir išorinę sandaugas.
Iš (10.106) išreiškę narįX ·v X∧v ir įstatę jį į (10.105) bei įvedę pažymėjimą
Ωv = v ∧ v , (10.107)
pagaliau gauname kompaktišką judančio krūvio generuojamą Faraday’aus laukoišraišką [13],
F = FC +FR =q
4π
X ∧ v(X · v)3 +
q
8π
XΩvX
(X · v)3 .JUDANČIO KRŪVIO
FARADAY’AUS LAUKAS
(10.108)Tai pagrindinė formulė, kuri nusako judančio krūvio kuriamą elektromagnetinįlauką. Pirmasis narys FC didėjant atstumui mažėja kaip (X · v)−2, t. y. lau-ko silpnėjimas yra atvirkščiai proporcingas atstumo X · v kvadratui. Jis aprašostatinius laukus. Tuo tarpu antrasis, radiacinis, narys FR silpsta lėčiau. Jis yraatvirkščiai proporcingas atstumui, t. y. FR ∼ (X · v)−1. Šis toliveikis narysyra susijęs su spinduliuote. Tuo būtų galima įsitikinti apskaičiavus jo energijos

Reliatyvistinė elektrodinamika 267
srautą per be galo didelį uždarą paviršių ir parodžius, kad šis nėra lygus nuliui.Atkreipkit dėmesį, kad pagreitis stovi tik toliveikio nario bivektoriuje Ωv. Taireiškia, kad spinduliuoja tik krūviai, kurie juda su pagreičiu. Norėdami geriausuprasti (10.108) formulę, išnagrinėkim dalinius jos atvejus.
10.6.1. Pastoviu greičiu judantis krūvis. Pastoviu greičiu trimatėje erdvė-je judantį krūvį parametrizuoja pasaulinė linija
x0(τ) = vτ, v2 = 1 , (10.109)
kurioje vektorių v gauname pasukę stovintį krūvio šaltinį Lorentzo rotoriumi v =
Rγ0R. ŠviesiškasisX vektorius (10.93) tokiu atveju yra
X = x− x0(τ) = x− vτ, X2 = 0 . (10.110)
Iš kvadratinės lygtiesX2 = 0 rasime savąjį laiką. Išsprendę gauname
τ = v · x −»(v · x)2 − x2 . (10.111)
Iš dviejų kvadratinės lygties sprendinių paėmėme tą, kurio ženklas prieš kvad-ratinę šaknį yra neigiamas, nes, kaip rodo 10.2 pav., krūvio pasaulinės linijostaškas x0(τ) yra žemiau stebėtojo taško x. Kvadratinė šaknis nėra patogi skai-čiavimams, todėl pasinaudojus tapatybe
X · v = (x− vτ) · v = v · x− τ =»(v · x)2 − x2 , (10.112)
šaknį galėtume pakeisti skaliaruX · v.Dar patogesnį pavidalą gausime, jei pastebėsime, kad dviejų žemiau užrašytų
išraiškų suma lygi nuliui,
(v · x)2 − x2 = (xvxv + vxvx+ xvvx+ vxxv)/4− x2, (10.113a)
|x ∧ v|2 = (xvvx− xvxv − vxvx+ vxxv)/4. (10.113b)
Tuo visai nesunku įsitikinti sudėjus jų dešines puses ir prisiminus, kad v2 = 1, obet kokio vektoriaus kvadratas visada yra skaliaras,
(v · x)2 − x2 + |x ∧ v|2 = (x2 + vx2v)/2− x2 = 0 . (10.114)
Tada pasinaudoję (10.112) ir (10.114) formulėmis narįX ·v galim perrašyti taip4:
X · v =»−|x ∧ v|2 =
»−(x ∧ v)(v ∧ x) =
»(x∧ v)2 = |x ∧ v| . (10.115)
4Šį pertvarkymą lengviau suprasti iš paprastesnio pavyzdžio:√
−|σ1|2 =√−σ1σ1 =√
σ21 = |σ1|. Taip yra todėl, kad |σ1|2 = −1.

268 10 skyrius
Kai judama pastoviu greičiu, tiek krūvio, tiek ir stebėtojo pasaulinės linijos yratiesės (žr. 10.2 pav.), todėl įvykių skirtumo vektoriusX nuo laiko irgi turi priklau-syti tiesiškai. Tokiu atveju formulėse vietoje sandaugosX ∧ v = (x− vτ)∧v =x∧ v (žr. (10.110) formulę) galime rašyti tiesiog x∧ v . Be to, kadangi pagreitisv = 0, tai Ωv = 0, ir formulė (10.108) labai supaprastėja,
F = FC =q
4π
x ∧ v|x ∧ v|3 . (10.116)
Užrašykime koordinatės ir greičio išorinę sandaugą x ∧ v Euklido erdvės termi-nais — per trimatį atstumą r ir reliatyvų šaltinio greitį v. Tai bus paprasta pada-ryti, jei išorinę sandaugą išreikšime geometrinėmis sandaugomis, o tada tarp šiųvektorių įterpsime vienetą, 1 = γ20 . Jis perskelia keturmatį įvykį ir greitį, todėlgauname
x ∧ v =1
2
(xγ0γ0v − vγ0γ0x
)=γ
2(t+ r)(1− v)− γ
2(1 + v)(t− r)
=γ(r − vt)− γr ∧ v , (10.117)
kur v yra reliatyvus taškiniokrūvio greitis stovinčio stebėtojo atžvilgiu, o r atstu-mas tarp jų laiko momentu t. Pirmasis (10.117) išskaidymo narys yra vektorius,todėl jis susijęs su elektriniu lauku E. Antrasis narys yra bivektorius, todėl galibūti užrašytas kaip magnetinis laukas, B = IB. Taigi, iš (10.116) ir (10.117)formulių išplaukia, kad
E =qγ
4πd3(r − vt), B =
qγ
4πd3Ir ∧ v , (10.118)
kur d2 = |x∧ v|2 = (x∧ v)(flx∧ v) = r2 − (r·v)2v2 + γ2
Ät|v| − r·v
|v|ä2
yra taškinįkrūvį ir stebėtoją skiriantis atstumas trimatėje erdvėje. Jo išraišką nesunku išvestipasinaudojus (10.117) formule ir pastebėjus, kad (r∧v)(flr ∧ v) = v2r2−(r·v)2bei γ2 = 1
¿(1− v2). Taigi, visi pastoviu greičiu judančio krūvio sukurti laukai
yra atvirkščiai proporcingi atstumo kvadratui. Svarbiausia, kad judantis krūvis,kaip rodo (10.118) antroji formulė, ima generuoti ir magnetinį lauką, kurio dydisyra proporcingas greičiui. Šis laukas maksimalus kai v⊥r ir lygus nuliui kaiv‖r, t. y. kai taškinis krūvis lekia tiesiai į stebėtoją.
10.9 pavyzdys. Parodysime, kad vieneto γ0γ0 = 1 įterpimas (10.117) lygtyje tarpvektoriųx ir v realizuoja tokį patį erdvėlaikio perskėlimą, kaip (10.22) lygtyje. Tai matytiiš šių apskaičiavimų:
x ∧ v = (x ∧ v)γ0γ0 =((x ∧ v) · γ0 + (x ∧ v) ∧ γ0
)γ0
=((x ∧ v) · γ0
)γ0 +
((x ∧ v) ∧ γ0
)γ0 = E + B,
(10.119)

Reliatyvistinė elektrodinamika 269
kur E yra laikiškasis (E2 > 0), o B erdviškasis (B2 < 0) bivektoriai, kuriuos Cl3,0algebroje interpretuojame kaip elektrinio lauko vektorių ir magnetinio lauko bivektorių.
Atkreipkite dėmesį, kad paskutinį (10.117) formulės narį r ∧ v reikia interpretuotikaip dviejų Cl3,0 algebros vektorių išorinę sandaugą, nes x ir v jau buvom perskėlę:xγ0 = x0 + x1γ1γ0 + x2γ2γ0 + x3γ3γ0 ≡ t + r ir vγ0 = xγ0 = dx
dτ γ0 = γ(1 +v1γ1γ0 + v2γ2γ0 + v3γ3γ0) ≡ γ(t + v), kur γ = dt/dτ yra Lorentzo daugiklis, ov = dr
dt . Ir tik po to rezultatą užrašėme kaip išorinę trimačių vektorių sandaugą.
10.6.2. Su pagreičiu judantis krūvis. Išilgai γ3 ašies greitėjantį kūną para-metrizuoja pasaulinė linija, kurios polinkis, o tuo pačiu ir Lorentzo stūmio kam-pas (žr. (9.37) formulę), yra, pavyzdžiui, tiesiog proporcingas savajam laikuiατ ,
x0(τ) = R(ατ)γ3R(ατ) = α−1Äγ3 ch(ατ) + γ0 sh(ατ)
ä
= α−1Äch(ατ) + γ3γ0 sh(ατ)
äγ3
= α−1eατσ3γ3 = α−1γ3e−ατσ3 .
(10.120)
Daugikliai formulėje parinkti taip, kad pradiniu laiko momentu krūvis būtų ko-ordinačių pradžioje. Kreivė aprašo vieną hiperbolės šaką γ0–γ3 plokštumoje.Krūvio savasis greitis yra (10.120) kreivės išvestinė pagal savąjį laiką,
v(τ) = x0(τ) =Äch(ατ) + σ3 sh(ατ)
äγ0 = eατσ3γ0 = γ0e
−ατσ3 . (10.121)
Jo kvadratas, kaip ir turi būti, nepriklauso nuo parametro τ vertės v2(τ) = 1.Reliatyvų krūvio judėjimo greitį randam iš (9.57) formulės,
v ∧ γ0v · γ0
= γ3 ∧ γ0sh(ατ)
ch(ατ)= σ3 th(ατ) . (10.122)
Taigi, trimatėje erdvėje stebimas krūvio greitis yra proporcingas stūmio kampohiperboliniamtangentui. Pastebėsime, kad su pagreičiu judančiam kūnui sandau-ga vv jau nėra lygi nuliui, t. y. keturmatis pagreitis ir greitis nėra vienas kitamortogonalūs,
vv = ασ3 . (10.123)
Skaičiavimus atlikti yra patogiau cilindrinėje stebėtojo koordinačių sistemoje,
x = tγ0 + ρ(cosφ γ1 + sinφ γ2) + zγ3 , (10.124)
kurios Euklido erdvės atitikmenis randame perskėlę erdvėlaikį,
t = x · γ0, r = x ∧ γ0 = ρ(cosφσ1 + sinφσ2) + zσ3 , (10.125)
kur r2 = |r|2 = ρ2 + z2. Keturmatį intervalą šioje koordinačių sistemoje skai-čiuojame pagal formulę
x2 = (xγ0)(γ0x) = t2 − r2 = t2 − ρ2 − z2 . (10.126)

270 10 skyrius
Pritaikius (10.120) ir (10.121) išraiškas nesunkuapskaičiuoti vėluojantį švie-sinį įvykių skirtumo vektorių,
X = x− x0(τ) =x− α−1eατσ3γ3 = x− α−1γ3e−ατσ3
=x− α−1v(τ)γ0γ3 = x− α−1γ3γ0v(τ) .(10.127)
Kaip žinome, šviesiniai vektoriai tenkina sąlygą X2 = 0, iš kurios, pasinaudoję(10.125) ir (10.126) sąryšiais, gauname
0 = X2 = XX
= (x− α−1vγ0γ3)(x− α−1γ3γ0v) = x2 − α−2 + α−1(vγ3γ0x+ xγ0γ3v)
= x2 − α−2 + α−1t(vγ3 + γ3v) + α−1r(γ3v − vγ3)
= t2 − ρ2 − z2 − α−2 + 2zα−1 ch(ατ)− 2tα−1 sh(ατ) , (10.128)
kur z = r · σ3 (žr. (10.125) formulę). Gauta lygtis susieja judančio krūviosavąjį laiką τ su stebėtojo erdvine koordinate ir laiku t. Iš jos galima išreikštihiperbolines funkcijas ch(ατ) ir sh(ατ), o tada jau apskaičiuotiketurmatį greitį vir pagreitį v, kurie betarpiškai įeina į Faraday’aus bivektoriaus (10.108) išraišką.Galutinius atsakymus skaitytojas ras puikioje knygoje [13].
10.3 paveiksle pavaizdavome elektrinio lauko pasiskirstymą aplink taškinįkrūvį praėjus tam tikram laiko tarpui po staigaus krūvio stumtelėjimo pagreičiu v.Toks stumtelėjimas sukėlė tolyn nuo krūvio šviesos greičiu sklindančią bangą,kurios priežastis yra atsiradęs ir vėl dingęs pagreitis.
10.3 pav. Elektrinio lauko linijųpasiskirstymas z–ρ plokštumoje stai-giai stumtelėjus taškinį krūvį vertika-lia z kryptimi. Kryželis rodo pradinękrūvio padėtį
Prieš ir po stumtelėjimo lauką nusako(10.118) formulė. Geriau įsižiūrėjus įpaveikslą galima pastebėti, kad išoriniailauko linijų spinduliai sueina į tašką centre,kuris vaizduoja pradinę krūvio padėtį.Tuo tarpu vėliau sugeneruotos vidinėscoulombinio lauko linijos sueina į naująkrūvio vietą. Atkreipkite dėmesį, kadišilgai z ašies (postūmio kryptimi) laukasvisai nepakito, o daugiausia pasikeitėstatmena z ašiai kryptimi. Jei pastoviupagreičiu krūvį vėl stumteltume į pra-dinę padėtį, lauko pokytis statmena zašies kryptimi įgytų priešingą ženklą, —išeitų apversta raidė „V“ arba pusė zigzago.

Reliatyvistinė elektrodinamika 271
Žinoma, jei pagreitis neatsirastų akimirksniu, o didėtų ir po to mažėtų palaips-niui, aštrus zigzago kampas virstų sinusoidės lanku. Taigi, krūviui judant z ašimiaukštyn-žemyn, statmena kryptimi susidaro ir nubėga banga. Tai leidžia supras-ti sunkiai paaiškinamą, bet visiems labai gerai žinomą rezultatą, būtent, kodėlelektrinio dipolio ašimi osciliuojantis krūvis elektromagnetinį lauką stipriausiaispinduliuoja statmena dipolio ašiai kryptimi ir visai nespinduliuoja išilgai krūviojudėjimo linijos.
10.10 pavyzdys. Jei dvi lygiagrečias metalines plokšteles įelektrinsimepriešingoženk-lo krūviais, gausime gerai žinomą elektrinių grandinių elementą — kondensatorių. Norstarp plokštelių sudarėme tik elektrinį lauką, dideliu greičiu išilgai begalinių plokštelių le-kianti neutrali, bet nenulinį magnetinį momentą turinti dalelė, pavyzdžiui, neutronas imsjausti magnetinį lauką. Apskaičiuokime, kokio gi stiprumo magnetinis laukas atsirandakartu su dalele lekiančio stebėtojo sistemoje.
Uždaviniui išspręsti pakanka žinoti tik tai, kad elektromagnetinį lauką aprašo relia-tyvumo teorija. Pirmiausia pastebėsime, kad tarp (begalinių) kondensatoriaus plokšte-lių susidarantis elektrinis laukas yra vienalytis. Laikykime, kad jis nukreiptas σ1 ašieskryptimi, E‖σ1. Tada reliatyvumo teorijoje jį galima užrašyti kaip laikiškąjį bivektoriųE = E1γ0γ1. v greičiu tarp σ3 plokštelių v‖σ3 kryptimi judančią dalelę „pasigaminsi-me“ stovinčią dalelę paveikę stūmio eksponente exp(γ3γ0α/2), kur α reiškia stūmiokampą. Tada judančios dalelės koordinačių sistemoje Faraday’aus laukas, kuris stovin-čioje kondensatoriaus sistemoje turėjo tik elektrinio lauko sandą E1, irgi bus pasuktastuo pačiu stūmio rotoriumi,
F = eγ3γ0α/2(E1γ0γ1)e−γ3γ0α/2 = E1(γ0γ1 chα+ γ3γ1 shα). (10.129)
Tai ir yra mūsų atsakymas. Jis įdomus štai kuo. Kai dalelė stovi,α = 0, gauname pradinįlauką, kuris yra laikiškasis bivektorius. Kai dalelė pradeda judėti, α 6= 0, prie laikiško-jo bivektoriaus prisideda erdviškasis bivektorius γ31 = γ3γ1 , kuris rodo, kad stebėtojosistemoje atsirado magnetinis laukas. Prisiminę ryšį tarp kampo α ir reliatyvaus greičio
v, shα = |v|γ/c (žr. (9.63) formulę), ir tapatybę shα =√1 + ch2 α magnetinį lauką
galime užrašyti per dalelės greitį. Kadangi γ3γ1 = −Iσ2 , tai magnetinio lauko vekto-rius yra B nukreiptas −σ2 kryptimi, B‖σ3. Taigi, elektrinio lauko, dalelės greičio irmagnetinio lauko vektoriai yra vienas kitam ortogonalūs. Jei dalelė turi vidinį sukinį (jįturi ir neutronas, ir elektronas), tai pastarasis pradeda sąveikauti su magnetiniu lauku,t. y. ima aplink jį precesuoti. Todėl stacionariu atveju, kai sukinys nukreiptas pagal arprieš vektoriųB, gausime energijos termo (o tuo pačiu ir neutronų puoštelio) suskilimą.Kvantinėje mechanikoje ši reliatyvistinė sąveika vadinama sukinio ir orbitos sąveika (ar-ba sukinys-orbita sąveika), nes dalelės sukinys sąveikauja su elektriniu lauku tik tada,kai jis juda (kokia nors) orbita. Ta pati sąveika pasireiškia ir atomuose, tik ten klasikiniupožiūriu įsivaizduojame, kad elektronai juda apskritiminėmis orbitomis.


11. Diraco lygtis
Reliatyvistinė elektrono lygtis, dar vadinama ją užrašiusio anglų fizikoP. A. M. Diraco vardu, yra svarbiausia iš visų kvantinių lygčių. Be jos neįmanomatiksliai aprašyti atomo sandaros ar sukonstruotidalelių greitintuvo, kur elektronaijuda artimais šviesai greičiais. Deja, Diraco lygtis yra ir pakankamai sudėtinga,todėl paskaitose studentai su ja beveik nesusipažįsta. Geometrinė algebra leidžiareliatyvistinę kvantinę mechaniką suformuluoti paprasčiau ir suprantamiau.
Kaip sužinojome 8 skyriuje, Paulio-Schrödingerio lygties sprendiniai yra va-dinami spinoriais. Tai ne kas kita, kaip rotoriai trimatėje Euklido erdvėje, kurievektorių ar bivektorių gali pasukti bet kuria norima kryptimi. Spinoriai-rotoriaigali priklausyti nuo laiko, todėl jie tinka ir stebimų fizikinių reiškinių dinami-kai aprašyti. Tačiau Paulio-Schrödingerio lygtis yra teisinga tik daug lėčiau užšviesą judančiam elektronui. Tuo tarpu Diraco lygtis tinka ir elektronui, judan-čiam šviesai artimu greičiu. Iš Diraco lygties automatiškai išplaukia tiek sukinio,tiek ir antidalelės (pozitrono) egzistavimas bei orbitinio judesio kiekio momentoir sukinio sąveika. Skyriuje parodysim, kad Diraco lygtį užrašius geometrinėsalgebros kalba, reliatyvistinę banginę funkciją vėlgi galima interpretuoti kaip ro-torių, tik ne R3,0, o didesnėje, R1,3 Minkowskio erdvėje. Pati Diraco lygtis, kaiptai 1967 metais pirmą kartą parodė D. Hestenes [51], tada virsta rotoriaus lyg-timi erdvėlaikyje. Pabrėžiant tokios interpretacijos svarbą geometrinės algeb-ros simboliais perrašyta Diraco lygtis dar vadinama Diraco-Hestenes lygtimi. Jaremdamiesi panagrinėsime plokščią reliatyvistinę elektroninę bangą, kuri aprašolaisvai judantį elektroną, o po to išspręsime reliatyvistinio elektrono atspindžionuo potencinio laiptelio uždavinį.
11.1. Spinoriai Cl1,3 algebroje
Fizikoje spinoriumi vadinama banginė funkcija, kurios ženklas pasikeičia josargumentą erdvėje apsukus pilnu 2π kampu. Tokios funkcijos dažnai pasitelkia-mos elektrono vidiniam sukiniui aprašyti. Tačiau spinorių galima suprasti ir kaipabstraktų matematinį objektą — kompleksinių skaičių stulpelį ar eilutę, nesie-
273

274 11 skyrius
jant jo su kokia nors konkrečia elementaria fizikos dalele. Pavyzdžiui, Paulio-Schrödingerio lygties spinorių aprašo dviejų kompleksiniųskaičių stulpelis, kurispasižymi savybėmis
|ψ〉 =ñψ1
ψ2
ô, 〈ψ|ψ〉= [ψ∗
1, ψ∗2] ·ñψ1
ψ2
ô= |ψ1|2 + |ψ2|2 = 1 . (11.1)
Spinorių galima nusakyti ir kitokiais būdais. Pavyzdžiui, 8 skyriuje Cl3,0 algeb-roje spinoriumi ψ vadinome skaliaro ir trijų bivektorių su realiais koeficientaisak sumą,
ψ = a0 + akIσk, ψψ = 1 . (11.2)
Spinoriai sudaro taip vadinamą Spin(p, q) grupę, į kurią įeina visi lyginiai geo-metrinės algebros elementai ψ, tenkinantys sąlygą ψψ = 1. Toks apibrėžimasdera su (11.2) formule, kurią, kaip matome, ir sudaro tik lyginio rango baziniaielementai: ψ ∈ Spin(3, 0), ψψ = 1.
Diraco lygtis iš karto aprašo dvi daleles, elektroną ir pozitroną, todėl relia-tyvistinės banginės funkcijos (spinoriaus) stulpelį sudaro keturi kompleksiniaiskaičiai ψi:
|ψ〉 =
ψ1
ψ2
ψ3
ψ4
, 〈ψ|ψ〉= |ψ1|2 + |ψ2|2 + |ψ3|2 + |ψ4|2 = 1 . (11.3)
Juos atitinka aštuoni realieji skaičiai (koordinatės). Suskaičiavę Cl1,3 algebroselementus matome, kad lyginio rango bazinių elementų (skaliaras + šeši bivekto-riai + pseudoskaliaras)būtent tiek ir yra. Jie sudaro lyginįCl1,3 algebros poalgeb-rį Cl+1,3. Todėl galima užrašyti tokį atitikmenį tarp Hilberto erdvės ir Cliffordo
algebros spinorių1:
|ψ〉 =
a0 + ia3
−a2 + ia1
b0 + ib3
−b2 + ib1
⇔ ψ = a0 + akIσk + (b0 + bkIσk)σ3 .
SPINORIUS Cl1,3
(11.5)
1Tai nėra vienintelis galimas atitikmuo. Vietoje šio galėtume, pavyzdžiui, naudoti [52] tokį:
|ψ〉 =[
a0+ib3
−b2+ib1
a3+ib0
a1+ia2
]⇔ ψ = a0 + akσk + I(b0 + bkσk) . (11.4)
Svarbu tik, kad konstruojant atitikmenį būtų panaudoti visi lyginio rango baziniai elementai.

Diraco lygtis 275
Užrašę (11.5) spinoriaus skleidinį išreikštai turime
ψ = a0 − a1γ23 − a2γ31 − a3γ12 − b0γ03 − b1γ02 + b2γ01 + b3γ0123
= (a0 + a1Iσ1 + a2Iσ2 + a3Iσ3) + (b0σ3 + b1σ2 − b2σ1 + b3I).(11.6)
Jo modulio kvadratas yra2
|ψ|2 = 〈ψψ〉0 = 〈ψψ〉= a20 + a21 + a22 + a23 − b20 − b21 − b22 − b23 .
(11.7)
Matome, kad erdviškieji bivektoriai duoda pliuso, o laikiškieji — minuso ženk-lą. Norint gauti lygiai tokius pačius ženklus tradiciniams Hilberto erdvės spino-riams, reliatyvistinėje kvantinėje mechanikoje apibrėžiamas sujungtinis Diracospinorius [53, 54],
〈ψ| = [ ξ∗1, ξ∗2,−ξ∗3,−ξ∗4 ] . (11.8)
Todėl galime iš karto parašyti taisyklę tarp atitinkamų Hilberto erdvės ir geomet-rinės algebros spinorių sandaugų
〈ψ|ψ〉 ⇔ 〈ψψ〉0 = 〈ψψ〉 . (11.9)
Tuo tarpu spinoriaus normą (11.3) nusako taisyklė
〈ψ|ψ〉= 1 ⇔ 〈ψγ0ψγ0〉0 ≡ 〈ψ≃ψ〉 = 1 , (11.10)
kurioje narys≃ψ = γ0ψγ0 reiškia apgręžtą multivektorių su atspindėtom erdvi-
nėm koordinatėm, γi → −γi, i = 1, 2, 3 (žr. (9.11) formulę).Užrašykime atitikmenį apgręžtam ψ bei apgręžtam ir su atspindėtom erdvi-
nėm koordinatėm (erdvėlaikio sujungtinumas)≃ψ spinoriui. Tuo tikslu paimkime
du laikiškuosiusbivektoriusc = c1σ1+c2σ2+c3σ3 beid = d1σ1+d2σ2+d3σ3
ir iš jų sudarykime bendriausio pavidalo spinorių,
ψcd = c+ Id = (c0 + c) + I(d0 + d) . (11.11)
Kadangi d komutuoja su I , tai galėjom rašyti irψcd = c+dI . Nesunku patikrinti,kad po apgrąžos ir erdvėlaikio sujungtinumo spinoriai tampa
ψcd = (c0 − c) + I(d0 − d) , (11.12a)≃ψcd = (c0 + c)− I(d0 + d) . (11.12b)
2Formulėje (11.3) skliaustai 〈. . . 〉 žymi spinoriaus-eilutės ir spinoriaus-stulpelio sandaugą(juos viduryje atskiria vertikalus skiriamasis brūkšnelis), tačiau (11.7) tie patys skliaustai jau reiš-kia tik rango išskyrimo operaciją, todėl svarbu sekti, kokie objektai stovi skliaustuose.

276 11 skyrius
Sudėjus bei atėmus (11.11) ir (11.12) lygtis nesunku išskirti reikiamas spinorių
dalis, pavyzdžiui, (ψcd+≃ψcd)/2 = c0+c = c ar (ψcd−
≃ψcd)/2 = d0+d = Id.
11.1 pavyzdys. Parodysime, kad multivektoriaus apgaubimas iš kairės ir iš dešinės suγ0 yra ekvivalentiškas erdvinių bazinių vektorių atspindžiui γi → −γi , i = 1, 2, 3.
Pirmiausia patikrinkime, kaip šis apgaubimas veikia erdvinius vektorius: γ0γiγ0 =−γ0γ0γi = −γi . Laiko ašies bazinis vektorius γ0 nepasikeičia, nes γ0γ0γ0 = γ0. Norė-dami apskaičiuoti, kaip toks apgaubimas veikia n-ojo rango mentę An, įsivaizduokime,kad ji yra užrašyta kaip skaliarinio daugiklio ir bazinių vektorių geometrinė sandauga.Tuomet rezultatas γ0Anγ0 nepasikeis, jei tarp visų vektorių įterpsime vienetą, γ0γ0 = 1.Taip padarius visi baziniai vektoriai bus apgaubti γ0, todėl erdviniai vektoriai pakeis sa-vo ženklą, o laikinis — ne. Kadangi multivektorių sudaro įvairaus rango menčių suma,M =
∑n An, tai šią taisyklę galima pritaikyti kiekvienam sumos nariui. Apgaubimo γ0
vektoriais transformacija leidžia bet kokį multivektoriųsuskaidyti į lyginę (+) ir nelyginę(−) dalis,
M+ = (M + γ0Mγ0)/2 ,
M− = (M − γ0Mγ0)/2 ,(11.13)
kurios, kaip įsitikinome 9 skyriuje (žr. (9.78) formulę), skirtingai elgiasi trimatės erdvėsinversijos metu.
Dabar išmoksime geometrinėje algebroje užrašyti Diraco matricų veikimą įspinorius-stulpelius (ket vektorius). Kaip ir Cl3,0 atveju, mūsų tikslas yra rastioperatorių ir jo veikimą į spinorių nenaudojant matricų. Pritaikius (11.5) taisyk-lę nesunku patikrinti, kad yra teisingi šie atitikmenys tarp Diraco matricų γµ irbazinių Cl1,3 algebros vektorių γµ:
γµ|ψ〉 ⇔ γµψγ0 , γ5|ψ〉 ⇔ ψσ3 , (11.14a)
1|ψ〉 ⇔ ψ , i1|ψ〉 ⇔ ψIσ3 . (11.14b)
Čia 1 yra vienetinė 4× 4 matrica, o i =√−1 žymi menamąjį vienetą. Priminsi-
me, kad Cl3,0 algebroje dešinėje spinoriaus pusėje stovėjo σ3 elementas (8.29),kuris nusakė sukinio kvantavimo ašį. Pažvelgę į pirmąją (11.14a) formulę ma-tome, kad dabar pasirodo dar ir laiko ašies vektorius γ0, kuris rodo laiko tėkmėskryptį erdvėlaikyje.
11.1 lentelėje surašėme daugiau tradicinės reliatyvistinės kvantinėsmechani-kos atitikmenų Cl1,3 algebroje, kuriais toliau ir naudosimės. Juos nesunku išvestiiš (11.5), (11.9), (11.10) ir (11.14) formulių. Pastebėsime, kad nors γ5 matrica,kaip išsiaiškinome 9.3 pavyzdyje (žr. (9.7) formulę), nepriklauso Cl1,3 algebrai,tačiau jos veikimą į spinorių galima užrašyti, kaip tai matyti iš 11.1 lentelės.

Diraco lygtis 277
Erdvė ErdvėHilberto Cl1,3 Hilberto Cl1,3
|ψ〉 ψ γµ|ψ〉 γµψγ0i|ψ〉 ψIσ3 iγµ|ψ〉 γµψγ0Iσ3 = γµψIγ3γ5|ψ〉 ψσ3 iγ5|ψ〉 ψI|ψ〉∗ −γ2ψγ2 i∂k|ψ〉 ∂kψIσ3
〈ψ| γ0ψγ0 γµ∂µ|ψ〉 ∇ψγ0〈ψ| ψ ∂|ψ〉/∂t ψ
〈ψ|ψ〉 〈γ0ψγ0ψ〉 = 〈γ0ψγ0ψ〉 i ∂|ψ〉/∂t ψIσ3
〈ψ|ψ〉 〈ψψ〉 = 〈ψψ〉 γµγ5|ψ〉 γµψγ3〈ψ|φ〉 〈ψφ〉 − 〈ψφIσ3〉Iσ3 γµγν|ψ〉 γµγνψ
11.1 lentelė. Operatorių veikimo į Hilberto erdvės būsenų vektorius atitikme-nys Cl1,3 algebroje. Spinoriai ψ ir φ komutuoja su pseudoskaliaru, ψI = Iψ.Indeksų reikšmės yra µ, ν = 0, 1, 2, 3 ir k = 1, 2, 3
11.2 pavyzdys. Pasinaudoję 8 skyriuje pateiktais bazinių vektorių γk matriciniais at-vaizdais parodysime, kad atitikmuo γµ|ψ〉 ⇔ γµψγ0 dera su ket vektoriaus keitimotaisykle |ψ〉 ⇔ ψ (žr. (11.5) formulę). Apskaičiavimus atliksime γµ = γ3 vektoriui:
γ3|ψ〉 =
0 0 −1 00 0 0 11 0 0 00 −1 0 0
a0 + ia3
−a2 + ia1
b0 + ib3
−b2 − ib1
=
−b0 − ib3
−b2 + ib1
a0 + ia3
a2 − ia2
. (11.15)
Pagal (11.5) taisyklę apskaičiavę paskutinio stulpelio atitikmenį Cl1,3 algebroje, turim
γ3|ψ〉 ⇔ −b0 − b1γ23 − b2γ31 + b3γ12 − a0γ03 + a1γ02 − a2γ01 + a3γ0123 . (11.16)
Kita vertus, išskleidę γ3ψγ0 gauname tą patį rezultatą,
γ3ψγ0 = γ3(a0 − a1γ23 − a2γ31 − a3γ12 − b0γ03 − b1γ02 + b2γ01 + b3γ0123
)γ0
= −b0 − b1γ23 − b2γ31 + b3γ12 − a0γ03 + a1γ02 − a2γ01 + a3γ0123 .
(11.17)
11.3 pavyzdys. Parodysime, kad operatorių i1 ≡ i ir γµ sandaugai galima taikytipakeitimo taisyklę iγµ|ψ〉 ⇔ γµψIγ3 . Iš tiesų, jei turime atskirų operatorių veikimo
atitikmenis a|ψ〉 ⇔ alψar ir b|ψ〉 ⇔ blψbr , tai operatorių sandaugos keitimo taisyklęgausime tiesiog atlikę pakeitimus vieną po kito,
ab|ψ〉 = a(b|ψ〉
)⇔ al(blψbr)ar = alblψbrar . (11.18)
Apskaičiavę randame
i(γµ|ψ〉
)⇔ (γµψγ0)Iσ3 = γµψIγ3 . (11.19)

278 11 skyrius
Pasinaudoję (11.1) lentelės atitikmenimis, kitame poskyryje matricinę Di-raco lygtį perrašysime multivektoriniu pavidalu. Tačiau prieš tai aptarkime darvieną labai svarbų klausimą — teorijos invariantus.
11.2. Invariantai ir stebiniai
Invariantiškumasyra viena iš fundamentaliųjų fizikos sąvokų, reiškianti, kadišmatuotas fizikinis dydis nepriklauso nuo kokių nors konkrečių aplinkybių, pa-vyzdžiui, nuo vietos, kur atliekamas matavimas, ar matuojamo objekto formos.Matematiškai invariantiškumąapibūdinamatavimo rezultatų nekeičiančios trans-formacijos. Jas išsamiai nagrinėja grupių teorija. Pavyzdžiui, erdvėlaikio vek-toriaus kvadratas nepasikeičia (yra invariantas) atlikus Lorentzo transformaciją.Kita vertus, vektoriaus projekcija į laiko ašį (irgi skaliaras) invariantiškumo sa-vybe nepasižymi.
Dažnai invariantiškumą galima aprašyti paprasčiau, tiesiog nusakant, kokiudėsniu turi transformuotis objektą aprašančios koordinatės arba baziniai vekto-riai. Pavyzdžiui, geometriniu požiūriu vektorius yra invariantas, nors jo koordi-natės ir transformuojasi pasukus koordinačių sistemą3. Kiekvienoje iš Cliffordoalgebrų galima užrašyti baigtinį skaičių invariantų, kurių kiekis, bendrai kalbant,auga didėjant algebros bazinių vektorių skaičiui. Invariantai glaudžiai susiję sueksperimente matuojamais dydžiais, todėl jie yra svarbūs tikrinant, ar teorija tei-singai aprašo eksperimentą.
Invariantai, kuriuos įmanoma sudaryti iš Cl1,3 algebros spinorių, yra pateikti11.2 lentelėje [13]. Matome, kad invariantų, o tuo pačiu ir stebinių, yra lygiaitiek, kiek skirtingų rangų. Taigi, algebros Cl1,3 atveju stebiniai yra skaliariniai,vektoriniai, bivektoriniai, pseudovektoriniai (trivektoriniai) ir pseudoskaliariniailaukai. Trečiame stulpelyje užrašėme atitinkamų laukų projekcijas. Kaip mato-me, jos išsireiškia per lauko ir to paties rango bazinių elementų vidines sandau-gas. Pavyzdžiui, jei laukas yra bivektorius, kaip elektromagnetinis Faraday’auslaukas, jis turi šešis sandus. Paskutiniame 11.2 stulpelyje surašėme invariantusiš kvantinės mechanikos vadovėlių, kurie yra užrašyti naudojant Diraco matricasir todėl neturi aiškios geometrinės interpretacijos.
Skaliariniai ir pseudoskaliariniai laukai turi tik po vieną sandą, kurį užrašėmper du nepriklausomus parametrus, ρ > 0 ir β. Tokio užrašymo patogumasišplaukia iš to, kad spinoriaus modulį, t. y. sandaugą ψψ, visada galima užrašyti
3Tenzoriniame skaičiavime sakoma,kad vektoriai transformuojasi kaip kovariantiniai ar kont-ravariantiniai dydžiai, nes šiame skaičiavime jų neįmanoma aprašyti nenaudojantkoordinačių. Ta-čiau vektorius kaip geometrinis objektas visada yra invariantas — jo dydis bei kryptis nepriklausonuo naudojamos koordinačių sistemos.

Diraco lygtis 279
Bazinis Bekoord. Bazinio elemento Tradicinė bra-ketinvariantas GA forma projekcija forma
Skaliaras ρ cosβ 〈ψψ〉 〈ψ|ψ〉Vektorius ψγ0ψ γµ · (ψγ0ψ) 〈ψ|γµ|ψ〉Bivektorius ψIσ3ψ (γµ ∧ γν) · (ψIσ3ψ) 〈ψ|i 12(γµγν − γν γµ)|ψ〉Pseudovektorius ψIγ3ψ (Iγµ) · (ψIγ3ψ) 〈ψ|γµγ5|ψ〉Pseudoskaliaras Iρ sinβ 〈ψIψ〉 〈ψ|iγ5|ψ〉
11.2 lentelė. Cl1,3 algebros invariantai užrašyti bekoordinatiniu ir koordinatiniupavidalu. Palyginimui paskutiniame stulpelyje užrašėme jų atitikmenis per bra irket vektorius tradicinėje reliatyvistinėje mechanikoje
kaip skaliaro ir pseudoskaliaro sumą,
ψψ = ρ cosβ + Iρ sinβ = ρeIβ , (11.20)
kur dydis ρ yra interpretuojamas kaip tikimybė surasti Diraco reliatyvistinę da-lelę erdvėlaikio taško x = (t,x) aplinkoje. Tuo tarpu fazinis daugiklis β nurododalelės-antidalelės būsenos įnašą [13, 54]. Kai β = 0, turim dalelę (elektroną), okai β = π — antidalelę (pozitroną). Tarpiniai atvejai atitinka dalelės ir antidale-lės superpoziciją Diraco dalelėje. Fizikoje svarbiu atveju, kai turime tik elektroną(arba tik pozitroną), ψ spinorių (11.20) formulėje galima sunormuoti į vienetą,ψψ = 1. Tokiu atveju spinorius yra grynas Lorentzo rotorius keturmatėje erdvė-je. Būtent tokios kvantinės būsenos įdomiausios.
Kitas paprastas invariantas yra apibendrintas srovės vektorius. Tradicinėjereliatyvumo teorijoje jo sandai, kurie priklauso nuo pasirinktos koordinačių sis-temos, užrašomi Diraco matricomis tokiu būdu:
Jµ = 〈ψ|γµ|ψ〉 . (11.21)
Pasinaudoję 11.1 lentelės eilute 〈ψ|φ〉, rodančia, kad dviejų spinorių sandaugosrezultatas yra skaliaro ir bivektoriaus suma, bei tuo, kad |φ〉 = γµ|ψ〉, šią formulęnesunkiai pervedame į geometrinės algebros kalbą,
Jµ = 〈ψγµψγ0〉 − 〈ψγµψγ0Iσ3〉Iσ3 . (11.22)
Kadangi γ0Iσ3 = γ0γ1γ2 = Iγ3, o skaičiuojant skaliarinę dalį narius galimacikliškai perstatyti, tai skaliarinį koeficientą prie bivektoriaus Iσ3 galima užrašy-ti paprasčiau, 〈ψγµψIγ3〉 = 〈γµψIγ3ψ〉. Parodysime, kad jis lygus nuliui. Pasi-naudosimtuo, kad I bet kokioje algebrojekomutuoja su lyginiaiselementais, taigi

280 11 skyrius
ir su ψ: ψI = Iψ. Tuo lengva įsitikinti vietoje ψ paėmus bivektorių ir išreikš-tai jį perkėlus per Cl1,3 algebros psudoskaliarą I , γµγνI = −γµIγν = Iγµγν .Pertvarkę multivektorių, kurio skaliarinė dalis ir yra koeficientas prie (11.22) bi-vektoriaus, turime 〈γµψIγ3ψ〉 = 〈γµIψγ3ψ〉 = −〈Iγµψγ3ψ〉 = −〈Iγµw〉 =−〈I(γµ · w +w ∧ γµ)〉 = 〈pseudoskaliaras+ bivektorius〉 = 0, kur w = ψγ3ψpažymėjome vektorių, pasuktą rotoriumi-spinoriumi ψ. Taigi, (11.22) išraiš-koje antrasis narys yra lygus nuliui, nes skaliarinės dalies sudaryti nepavyks-ta. Tuo tarpu (11.22) formulės pirmojo nario dalis ψγµψ yra nelyginio rangoir po apgrąžos ženklo nepakeičia. Tokias savybes Cl1,3 algebroje turi tik vek-torius. Todėl 〈ψγµψγ0〉 galima užrašyti kaip dviejų vektorių vidinę sandaugą,〈ψγµψγ0〉 = 〈γµψγ0ψ〉 = γµ · (ψγ0ψ). Iš čia matome, kad dydis Jµ yra ne kaskita, kaip Cl1,3 vektoriaus,
J = ψγ0ψ , Cl1,3 4-SROVĖ (11.23)
projekcija į γµ ašį, t. y. Jµ = γµ ·J . Pats vektoriusJ vadinamas pilnaCl1,3 srove.Žodis „srovė“ čia labai tinka, nes pasuktas bazinis laiko vektorius γ0, kaip matė-me 9 skyriuje, yra ne kas kita kaip, keturmatis greitis v. Į srovės formulę (11.23)įstatę bendro pavidalo ψ spinorių (11.6) gauname vektorių,
J = 2(−a0b2 + a1b3 + a2b0 − a3b1)γ0
+ (a20 + a21 − a22 − a23 − b20 − b21 + b22 + b23)γ1
+ 2(a1a2 − a0a3 − b1b2 + b0b3)γ2
+ 2(a0a2 + a1a3 − b0b2 − b1b3)γ3 .
(11.24)
Jei spinorius pagal taisyklę (11.10) normuotas į vienetą, tada apibrėžtas dydissuprantamas kaip keturmatės srovės (ar kito atitinkamo dydžio) tankis. Euk-lido erdvėje krūvio tankį ir trimatės srovės tankio vektorių J rasime perskėlęketurmatės srovės tankį J . Padauginę (11.24) išraišką iš γ0 matome, kad to-kiu atveju krūvio tankį atitinka koeficientas prie γ0, o trimatės srovės vektoriausJ = j1σ1 + j2σ2 + j3σ3 sandus — likę suskliausti (11.24) nariai.
Panašiai apskaičiuojame bivektoriaus invariantą. Reliatyvistinėje elektrodi-namikoje toks yra (žr. (9.78) formulę) šešių sandų elektromagnetinio lauko bi-vektorius F . Reliatyvistinėje kvantinėje mechanikoje invariantinio bivektoriausvaidmenį atlieka elektrono sukinys. Kaip matome iš 11.2 lentelės, jo matricinispavidalas yra
Sµν = 〈ψ|i 12(γµγν − γν γµ)|ψ〉 . (11.25)
Sukinio atitikmenį geometrinėje algebroje randame pasinaudoję 11.1 lentele,
Sµν = 〈ψγµ ∧ γνψIσ3〉 = 〈γµ ∧ γνψIσ3ψ〉 = (γµ ∧ γν) · (ψIσ3ψ) . (11.26)

Diraco lygtis 281
Iš (11.26) iš karto išplaukia bivektoriaus išraiška bekoordinatiniame atvaizde
S = 〈ψIσ3ψ〉2 . (11.27)
Dimensinius sukinio vienetus, kaip visada, gauname padauginę šią formulę iš~/2. Aišku, kad (11.27) formulė geometriškai daug aiškesnė už matricinę išraiš-ką (11.25). Ji rodo, kad sukinio kvantavimo ašį (tiksliau, kvantavimo plokštumąIσ3 = γ21) iš pradinės padėties į galinę pasuka spinorius ψ. Nauja (11.26) for-mulėje tai, kad jei nereliatyvistinėjekvantinėjemechanikoje turėjome tik trimatėserdvės bivektorius4, tai dabar turime erdviškųjų ir laikiškųjų keturmatės erdvėsbivektorių superpoziciją γµγν , kur µ, ν = 0, 1, 2, 3. Laikiškųjų bivektorių pa-sirodymas reiškia, kad sukinys priklauso ir nuo elektrono greičio, taigi, vaidinasvarbų vaidmenį reliatyvistiniuose reiškiniuose.
Įstatę bendro spinoriaus išraišką (11.6) į sukinio formulę (11.27) apskaičiuo-jame jo išreikštinį pavidalą,
S =2(−a0b1 + a1b0 + a2b3 − a3b2)σ1
+ 2(−a0b2 − a1b3 + a2b0 + a3b1)σ2
+ 2(−a0b3 + a1b2 − a2b1 + a3b0)σ3
+ 2(−a0a2 + a1a3 + b0b2 − b1b3)Iσ1
+ 2(a0a1 + a2a3 − b0b1 − b2b3)Iσ2
+ 2(a20 − a21 − a22 + a23 − b20 + b21 + b22 − b23)Iσ3 .
(11.28)
8 skyriuje išsiaiškinome, kad nereliatyvistinėje kvantinėje mechanikoje spi-norių galima interpretuoti ir kaip rotorių. Tai aiškiausiai matyti iš (8.44) formu-lės, kurioje išilgai kvantavimo ašies σ3 nukreiptas sukinys pasukamas į galinępadėtį. Užrašysime panašią formulę Cl1,3 algebroje. Pradžioje prisiminkime,kad spinoriai priklauso lyginiam poalgebriui Cl+1,3, tam pačiam, kuriam priklau-
so ir visi rotoriai. Be to, Cl+1,3 poalgebris yra izomorfiškas Paulio algebrai Cl3,0.Todėl reliatyvistinęψ funkciją galima susieti su Cl3,0 algebros klasikiniais stebi-niais.
Pradėkime nuo pastebėjimo, kad ψ spinoriaus kvadratą sudaro skaliaro irpseudoskaliaro suma (11.20). Prisiminę, kad tokią savybę turėjo B bivektorius(9.32), kaip ir 9 skyriuje, reliatyvistinį spinorių ψ galime užrašyti per normuotą
4Iš tiesų (žr. (8.44) formulę), Cl3,0 sukinio bivektoriausS (kurį čia, skirtingai negu 8 skyriuje,nenorėdami supainioti su keturmatės erdvės bivektoriumi, pažymėjome pajuodintu šriftu) mes netneapibrėžėme, o sukinį aprašėme jam dualiu sukinio vektoriumi s = −I3S. Tai nekeičia teiginioesmės — sukinys tėra erdvės vektorių konstrukcija.
282 11 skyrius
vienetinį rotorių R,
ψ =ÄρeIβ
ä 12 R . Cl1,3 SPINORIUS (11.29)
Taigi, reliatyvistinėje kvantinėje mechanikoje, panašiai kaip Paulio-Schrödinge-rio lygtyje, spinorius yra rotorius, tik dabar jau keturmatėje erdvėje. Tokį relia-tyvistinį rotorių R galima suskaidyti į stūmio Rα ir sukimo 3D erdvėje Rθ , kurisnepaliečia γ0 ašies, sandaugą R = RαRθ , kaip tai išplaukia iš (9.34) formulės.Erdvėlaikio sujungtinumo ir apgrąžos transformacijų atžvilgiu abu daugikliai el-
giasi skirtingai. Stūmis orientacijos nekeičia,≃Rα = Rα, o sukimas trimatėje erd-
vėje ją pakeičia į priešingą,≃Rθ = Rθ = −Rθ . Be to, visada RαRα = RθRθ = 1.
8 skyriuje Cl3,0 algebroje sukinį interpretavome kaip vektorių (8.44),
s =~
2ψσ3ψ, (11.30)
kur σ3 nusakė erdvinę kvantavimo ašį. Iš tikrųjų sukinys, kaip ir klasikinis ju-desio kiekio momentas, yra bivektorius. Tiesa, Cl3,0 algebroje, kaip jau žinome,egzistuoja vienareikšmis atitikmuo tarp bivektorių ir jiems (t. y. atitinkamomsplokštumoms) statmenų vektorių. Jei nenagrinėjame atspindžių, toks vektoriusleidžia formulėse sukinio bivektorių pakeisti skaičiavimams patogesniu objek-tu — vektoriumi, ir sukinio projekciją į σk kryptį skaičiuoti labai paprastai,sk = σk · s = 〈σks〉.
Užrašysime panašią į (11.30) formulę reliatyvistiniu atveju. Dabar tai pada-ryti sunkiau, nes Minkowskio erdvės bazinių vektorių, kurių yra keturi, ir bivek-torių, kurių yra šeši, skaičius nesutampa. Laikykime, kad bazinis vektorius γ3yra lygiagretus kvantavimo ašiai. Apgaubę jį keturmatės erdvės rotoriais R pagalanalogiją su Cl3,0 sukinio vektoriumi (11.30) galime rašyti
s = Rγ3R . SUKINIO VEKTORIUS Cl1,3 (11.31)
Šis rotorius veikia ir kitus bazinius vektorius, tarp jų ir savojo laiko bazinį vek-torių: Rγ0R = v, kuris lygus stebėtojo keturmačiam greičiui. Sudauginę vek-torius s ir v gauname bivektorių sv. Skaliaro nepasirodo, nes kvantavimo ašiesγ3 ir laiko γ0 vektoriai yra ortogonalūs, o sukimai ortogonalumo savybę išlaiko.Kadangi matavimus galime atlikti tik koordinačių sistemoje, judančioje kartu sustebėtoju, tai galime įsivaizduoti, kad vektorius v stebėtojui yra fiksuotas. Kitaiptariant, tų bivektorių, į kuriuos įeina stebėtojo keturmačio greičio v ir kvantavi-mo ašies s vektoriai, laisvės laipsniai yra panaudoti arba „įšaldyti“. Todėl iš šešiųbivektorių tik vienas, būtent γ21, neturės „įšaldytų“ γ0 ir γ3 laisvės laipsnių ir jį

Diraco lygtis 283
bus galima sukinėti rotoriais. Kadangi sv tipo bivektoriai „įšaldyti“, tai laisvi irfizikinę prasmę turi tik jiems dualūs bivektoriai Isv, būtent,
S3 = Isv = I(Rγ3R)(Rγ0R) = RIγ3γ0R = RIσ3R = Rγ2γ1R . (11.32)
Taigi S3 yra keturmatės erdvės bivektorius, gautas Lorentzo transformacija pa-sukus statmeną γ3 ašiai erdvinę plokštumą γ2γ1.
Keturmačio sukinio vektorių (11.31) padauginę iš γ0, t. y. perskėlę erdvė-laikį, sγ0 = Rγ3Rγ0 = s0 + s, bendru atveju gauname Cl3,0 algebros (Euklidoerdvės) skaliarą s0 ir vektorių s. Jei rotorius R = RαRθ realizuoja vien erd-vinį sukimą, t. y. jei Rα = 1 ir R = Rθ = eIσiθ, tada pasuktas vektorius s =eIσiθγ3e
−Iσiθ neturi γ0, todėl skaliarinė dalis nepasirodo, s0 = 0, o vektorinė da-lis sutampa su Cl3,0 algebros sukinios vektoriumi. JeiR realizuoja grynąjį stūmį,t. y. jei Rθ = 1 ir R = Rα = eσiα, tada s = eσiαγ3e
−σiα = sh 2αγ0+ch 2αγ3.Šiuo atveju erdvėlaikio perskėlimo rezultatas yra sγ0 = sh 2α + σ3 ch 2α. Tai-gi, išmatuotas sukinio dydis priklauso nuo stūmio α. Iš čia darome išvadą, kadbendru atveju matuojamas reliatyvistinis sukinys (taip pat ir elektrono) priklausonuo stebėtojo.
11.3. Diraco ir Diraco-Hestenes lygtis elektronui
Reliatyvistinėje mechanikoje laisvos dalelės pilnos energijos kvadrato for-mulė yra ne kas kita, kaip keturmačio intervalo tvermės dėsnis, tik užrašytas nelaikui ir koordinatei, o jų sujungtiniams dydžiams (9.86), t. y. judesio kiekiui(impulsui) p ir energijai E ,
E2 − (pc)2 = (mc2)2, RELIATYVISTINĖ ENERGIJA (11.33)
kur m žymi dalelės masę. Lygtis (11.33) yra kvadratinė, todėl pereinant į kvan-tinės mechanikos formalizmą ją tektų pakeisti antros eilės diferencialiniu opera-toriumi (antrąja išvestine), o judėjimo lygtį gautume visus narius sukėlę į vienąpusę ir prilyginę nuliui. Istoriškai taip ir buvo elgiamasi. Tačiau netruko paaiškė-ti, kad reliatyvistinėjeMinkowskio metrikoje, kitaip negu Euklido erdvėje, antroseilės diferencialinė lygtis negali užtikrinti, kad banginės funkcijos tikimybė visa-da išliks teigiama. Visada teigiamą tikimybę turėsime tik tuo atveju, jei diferen-cialinė lygtis bus ne antro, o pirmo laipsnio. Tokio pavidalo lygtį ir tikėjosi surastiP. A. M. Diracas. Jam kilo mintis reliatyvistinį energijos tvermės dėsnį (11.33),panašiai kaip išraišką a2 − b2 = (a+ b)(a− b), išskaidyti daugikliais,
ÄE + c
∑
µ
γµpµ +mc2äÄE − c
∑
µ
γµpµ −mc2äψ = 0 . (11.34)

284 11 skyrius
Lygtis tuomet būtų tenkinama, jei bent vienas iš daugiklių, veikdamas į ψ, duotųnulį, t. y. lygties laipsnis sumažėtų. Pasirodė, kad tokį skaidinį galima surastitik tada, jei koeficientus γµ laikysime 4× 4 matricomis, kurios dabar vadinamosDiraco vardu. Gauta pirmojo laipsnio lygtis (tiksliau, lygčių sistema, nes γµ yramatricos) aprašo reliatyvistinį elektroną ir pozitroną,Ä
E − c∑
µ
γµpµ −mc2äψ = 0 . (11.35)
Jei energiją pakeisime diferencijavimo pagal laiką E → i~∂/∂t, o pµ — dife-rencijavimo pagal koordinatę operatoriais, gausime Diraco lygčių sistemą, kuriužrašyta išskleistu pavidalu atrodo taip5:
i~∂ψ1
∂t+ i~c
(− ∂ψ4
∂x+ i
∂ψ4
∂y− ∂ψ3
∂z
)−mc2ψ1 = 0, (11.36a)
i~∂ψ2
∂t+ i~c
(− ∂ψ3
∂x− i
∂ψ3
∂y+∂ψ4
∂z
)−mc2ψ2 = 0, (11.36b)
i~∂ψ3
∂t+ i~c
(− ∂ψ2
∂x+ i
∂ψ2
∂y− ∂ψ1
∂z
)+mc2ψ3 = 0, (11.36c)
i~∂ψ4
∂t+ i~c
(− ∂ψ1
∂x− i
∂ψ1
∂y+∂ψ2
∂z
)+mc2ψ4 = 0. (11.36d)
Toliau, kaip įprasta, skaičiavimus atliksime natūralių vienetų sistemoje, c = 1 ir~ = 1. Pirmiausia, pasinaudoję Diraco matricomis (9.1), lygčių sistemą (11.36)užrašykime kompaktišku pavidalu,
iγµ∂µ|ψ〉 = m|ψ〉, kur |ψ〉 =
ψ1
ψ2
ψ3
ψ4
. (11.37)
Jei nagrinėjame ne laisvą, o su elektromagnetiniu lauku sąveikaujantį elektroną,judesiokiekiooperatorių ∂µDiraco lygtyjereikia pakeisti operatoriumi∂µ−eAµ,kur Aµ = (ϕ,A) žymi keturmatį elektromagnetinio lauko potencialą. Pastara-sis sujungia skaliarinį ϕ ir vektorinį A potencialus į vieną Minkowskio erdvėsvektorių. Taigi, standartinė Diraco lygtis elektronui elektromagnetiniame laukeyra
γµ(i∂µ − eAµ)|ψ〉 = m|ψ〉 . (11.38)
5Kaip dabar žinom, Diraco matricos yra viso labo bazinių vektorių γµ matriciniai atvaizdai.Bazinių vektorių (matricų) pasirinkimas nėra vienareikšmis, todėl knygose galima sutikti (11.36)lygčių ir su kitokiais ženklais.

Diraco lygtis 285
Lygtį (11.38) į geometrinės algebros kalbą nesunkiai pervesime pasitelkę 11.1 len-telę,
γµ∂µψIσ3γ0 − eAµγµψγ0 = mψ . (11.39)
Padauginę abi (11.39) puses iš γ0 ir pažymėję γµ∂µ = ∇ bei Aµγµ = A užrašo-me gražų Diraco lygties pavidalą Cl1,3 geometrinėje algebroje:
Ä∇ψäIσ3 − eAψ = mψγ0 . DIRACO LYGTIS Cl1,3 (11.40)
Matome, kad į ją įeina du iš anksto užduoti algebros elementai: savojo laikokryp-ties vektorius γ0 ir su juo komutuojanti išskirtinė erdviškoji plokštuma Iσ3, kuri,kaip matėme, nusako sukiniokvantavimoašį. Atkreipkitedėmesį, kad diferencia-liniai operatoriai dabar yra pakeisti geometrinės algebros vektoriniu nabla opera-toriumi∇ = γ0∂t+γ
i∂i. Lygties (11.40) pavidalas nepasikeičia atlikusLorentzotransformaciją. Jei spinoriųψ padaugintume iš fazinio daugiklio,ψ → ψeIσ3ϕ0 ,nesunku patikrinti, kad naujasis spinorius taip pat tenkintų (11.40) lygtį. Tai reiš-kia, kad Diraco lygties sprendiniai gali skirtis faziniu daugikliu. Toks Diracolygties invariantiškumas vadinamas kalibruotės invariantiškumu.
Diraco lygtis aprašo ne tik elektroną, bet ir jo antidalelę — pozitroną. Pozit-rono krūvis yra priešingo ženklo, e→ −e, todėl jį aprašo lygtis
∇ψIσ3 + eAψ = mψγ0 . (11.41)
Tokį pavidalą gautume, jei (11.40) lygtyje atliktume pakeitimą ψ → ψσ2, o poto, norėdami supaprastinti σ2, gautą lygybę iš dešinės dar padaugintume iš −σ2.Šių pertvarkymų rezultatas yra (11.41) lygtis, kuri tik krūvio ženklu skiriasi nuo(11.40), taigi, aprašo dalelę su priešingu krūviu. Tokiu būdu suradome krūviosujungtinumo transformacijos, kuri tradiciškai žymima simboliu C, atitikmenįgeometrinėje algebroje,
C|ψ〉 ⇔ ψσ2 . (11.42)
Panašiai surandamos laiko inversijos (T), lygiškumo(P) bei jų kombinacijos (CPTsimetrijos) transformacijos [51].
Kaip jau ne kartą minėjome, Diraco spinoriai ψ priklauso lyginiam erdvėlai-kio poalgebriui Cl+1,3, kurį sudaro skaliaras, šeši bivektoriai ir pseudoskaliaras.Jei spinorių paveiksim vektoriniu nabla operatoriumi ir rezultatą prilyginsim nu-liui, gausim taip vadinamą monogeninę diferencialinę lygtį ∇ψ = 0. Išskleistupavidalu ji atrodo taip:
γ0∂ψ
∂x0+ γ1
∂ψ
∂x1+ γ2
∂ψ
∂x2+ γ3
∂ψ
∂x3= 0 . (11.43)

286 11 skyrius
Ši lygtis yra klasikinės vektorinės lygties ∇f(x, y, z) = 0, kur ∇ = i∂/∂x +j∂/∂y + k∂/∂z yra tradicinis gradiento operatorius, analogas. Tik dabar vie-toje tradicinių ortų stovi γµ baziniai vektoriai. Multivektorinės funkcijos, kuriostenkina (11.43) lygtį, vadinamos monogeninėmis. Jos labai svarbios sprendžiantpraktinius geometrinės algebros uždavinius [7]. Šių klausimų mes neliesime, tikpastebėsim, kad masės ir potencialo nariai, kuriuos pridedam prie monogeninėslygties, kaip, pavyzdžiui, Diraco lygtyje (11.40), atlieka šaltinių vaidmenį. Taigi,tiek elektromagnetinis laukas, tiek ir elektrono masė yra šaltiniai.
11.4 pavyzdys. Iš Diraco lygties (11.40) išvesime nereliatyvistinę Schrödingerio irPaulio lygtį elektronui. Laikykime, kad elektromagnetinio lauko nėra, A = 0. TadaDiraco lygtis pavirsta į ∇ψIσ3 = mψγ0 . Norėdami gauti nereliatyvistinę lygtį, turimeperskelti erdvėlaikį. Tuo tikslu Diraco lygtį vieną kartą padauginkime iš kairės, o kitąkartą iš dešinės iš γ0. Gauname dvi lygtis
γ0∇ψIσ3 = mγ0ψγ0 , (11.44a)
∇ψIσ3γ0 = mψ . (11.44b)
Perskėlę nabla operatorių ∇γ0 = ∂t − ∇ ir γ0∇ = ∂t + ∇, pažymėję ψ = γ0ψγ0 irpastebėję, kad Iσ3γ0 = γ0Iσ3 , galime rašyti
∂tψIσ3 +∇ψIσ3 = mψ , (11.45a)
∂tψIσ3 −∇ψIσ3 = mψ . (11.45b)
Apibrėžkime lyginę ir nelyginę funkcijas ψ± = (ψ ± ψ)/2, iš kur ψ = (ψ+ + ψ−)/2 irψ = (ψ+ − ψ−)/2. Įstatę jas į (11.45) turime
∂t(ψ+ + ψ−)Iσ3 +∇(ψ+ + ψ−)Iσ3 =m(ψ+ − ψ−) , (11.46a)
∂t(ψ+ − ψ−)Iσ3 −∇(ψ+ − ψ−)Iσ3 =m(ψ+ + ψ−) . (11.46b)
Sudėję ir atėmę gauname
∂tψ+Iσ3 +∇ψ−Iσ3 = mψ+ , (11.47a)
∂tψ−Iσ3 +∇ψ+Iσ3 = −mψ− . (11.47b)
Banginės funkcijos laikinių osciliacijų dažnį lemia energijos dydis. Kadangi ieškomenereliatyvistinės lygties, manysime, kad didžiausią energijos dalį sudaro elektrono masėm, o ne jo kinetinė energija. Todėl spinorių užrašysim kaip lėtos φ± ir greitos e−Iσ3mt,kuri reiškia sukimąsi apie kvantavimo ašį, dalies sandaugą,
ψ±(t,x) = φ±e−Iσ3mt, ∂tψ± = (∂tφ± − φ±Iσ3m)e−Iσ3mt. (11.48)
Įstatę gauname
∂tφ+Iσ3 + φ+m+∇φ−Iσ3 = mφ+ , (11.49a)
∂tφ−Iσ3 + φ−m+∇φ+Iσ3 = −mφ− . (11.49b)

Diraco lygtis 287
Energijos nariai ∂tφ± yra nereliatyvistiniai, taigi, daug mažesni už masės narius. Dėlšios priežasties (11.49b) lygtį apytiksliai galim pakeisti tokia:
∇φ+Iσ3 ≈ −2mφ− . (11.50)
Išreiškę iš jos φ− ir įstatę į (11.49a), galutinai gauname
∂tφ+Iσ3 −1
2m∇
2φ+ = 0 . (11.51)
Tai ir yra Schrödingerio-Paulio lygtis laisvajam elektronui su sukiniu. Tokiu pačiu bū-du išvedama ir Schrödingerio-Paulio lygtis elektronui su sukiniu elektromagnetiniamelauke [55].
Menamojo vieneto reikšmė kvantinėje mechanikoje
Ilgai buvo manoma, kad kvantinės mechanikos lygčių neimanoma užrašyti bekompleksinio vieneto i =
√−1. Dabar jau žinome, kad taip nėra. Kvantinė
mechanika (bent jau didžioji jos dalis) gali būti suformuluota naudojant vienrealius skaičius. Todėl D. Hestenes, kuris pirmasis geometrinę algebrą pritaikėkvantinėje mechanikoje, siūlo ją vadinti tiesiog realiąja Diraco teorija. Geomet-rinė algebra paaiškina ir kam menamasis vienetas buvo reikalingas: menamomiseksponentėmis iš abiejų pusių apgaubus spinorių šis atlieka 4π apsisukimą, norseksponenčių argumentai keičiasi tik nuo 0 iki 2π. Tai, kad kvantinė sistema su-grįžta į pradinę padėtį tik pasukus ją 4π kampu, patvirtina eksperimentai [56].Geometrinėje algebroje sukimą 4π kampu realizuoja pusės kampo rotoriai, ku-rių eksponentėje stovi baziniai bivektoriai. Kaip žinome, tokių bivektorių kvad-ratas visada neigiamas, todėl geometrinės algebros kalba suformuluotai kvanti-nei mechanikai menami vienetai visai nereikalingi.
11.4. Plokščia elektroninė banga
Reliatyvistinėje kvantinėje mechanikoje ypatingas dėmesys skiriamas ketur-mačiam energijos ir impulso (judesio kiekio) operatoriui p, kuris yra ne kas kita,kaip dešinioji Diraco (11.40) lygties pusė,
p(ψ) ≡ (∇ψ)Iσ3 − eAψ . (11.52)
Operatoriaus p veikimą į spinoriųψmes užrašėm6 kaip funkcijąp(ψ), nes (11.52)išraiškos dešinėje stovintis bivektorius Iσ3 su spinoriumi nekomutuoja, ψIσ3 6=Iσ3ψ. Geometrinėje algebroje formulė (11.52) suprantama kaip vektorinė funk-cija nuo bivektorinio argumento ψ. Kadangi nabla operatorius diferencijuoja
6Kai kurie autoriai [13, 57], norėdami formulėms suteikti įprastą pavidalą, kuriame operato-rius visada rašomas kairėje, o spinorius, į kurį jis veikia, dešinėje, įveda specialius pažymėjimus.Pavyzdžiui, simbolį , kurio veikimas reiškia ψ ≡ ψIσ3, arba simbolį γµ, suprantamą kaipγµψ ≡ γµψγ0.

288 11 skyrius
pagal Minkowskio erdvės koordinates, operatorinė funkcija (11.52) yra impul-so operatoriaus veikimo į spinorių koordinatinis atvaizdis. Kaip ir tradicinia-me formalizme, uždavinius dažnai yra paprasčiau spręsti impulsiniame atvaizde,kuriame laisvos dalelės ψ funkcija užrašoma kaip paprasčiausia plokščia elekt-roninė banga su tam tikru fiksuotu impulsu. Į impulsinį vaizdavimą pereinamaoperatoriui∇ = γµ∂
µ pritaikius Fourier tansformaciją. Tokia transformacija eg-zistuoja ir geometrinėje algebroje [7, 58, 59]. Jos čia neaptarsime, o prie impul-sinio vaizdavimo pereisime tradicinę bėgančią elektroninę bangą e±ipµxµ pagal11.1 lentelės taisykles pervedę į geometrinės algebros pavidalą e±Iσ3p·x, kur pyra keturmatis vektorius p = γ0p
0+γ1p1+γ2p
2+γ3p3 ≡ γµp
µ = γµpµ. Taigi,plokščia erdvėlaikyje sklindanti elektroninė bangą yra
ψ = ψ0e±Iσ3p·x, (11.53)
kur ψ0 žymi nekintantį erdvėlaikyje spinorių.Už energijos ir impulso operatorių p ne ką mažiau svarbus yra kitas erdvė-
laikio vektorius — keturmatės srovės (11.23) tankis,
J = ψγ0ψ . (11.54)
Pasinaudoję Diraco lygtimi (11.40) ir komutaciniu sąryšiu [Iσ3, γ0] = 0, lengvaiapskaičiuojame jos divergenciją,
∇ · J = 〈∇J〉 = 〈∇ψγ0ψ〉 = 〈∇ψγ0ψ〉+ 〈∇ψγ0 ˙ψ〉
= −〈(eAψ +mψγ0)Iσ3γ0ψ〉+ 〈ψγ0 ˙ψ∇〉 .(11.55)
Kadangi 〈ψγ0 ˙ψ∇〉 = 〈ψγ0 ˙
ψ ˙∇〉 = 〈ψγ0(∇ψ)〉 = 〈ψγ0Iσ3(eAψ + mγ0ψ)〉,tai paskutinis narys lygus pirmajam, tik su priešingu ženklu. Todėl, keturmatėssrovės divergencija yra nulis,
∇ · J = 0 . (11.56)
Tai reiškia, kad net ir esant elektromagnetiniam laukui, Diraco srovė negali neiatsirasti, nei išnykti. Kadangi srovę suprantame kaip dalelių srautą, tai (11.56)lygtis ekvivalentiška teiginiui, kad Diraco lygties dalelė (fermionas) negali būtinei sukurta, nei sunaikinta. Deja, eksperimentai rodo, kad netoli stipraus elektro-magnetinio lauko šaltinio, pavyzdžiui, atomo branduolio, gali susikurti elektronoir pozitrono pora. Šio reiškinio Diraco lygtis negali nei paaiškinti, nei aprašyti,nes tai viendalelė lygtis. Porų susidarymą paaiškina daugiadalelė kvantinė laukoteorija, pavyzdžiui, kvantinė elektrodinamika.
Žinant keturmatę Diraco srovę nesunku apskaičiuoti tikimybės tankį. Jį ra-sime paėmę perskeltos srovės skaliarinę dalį (žr. 9.3 lentelę). Įstatę bendriausio

Diraco lygtis 289
pavidalo keturmatį spinorių (11.6) turime
J0 ≡J · γ0 = 〈Jγ0〉 = 〈ψγ0ψγ0〉 = 〈ψ≃ψ〉 = 〈
≃ψψ〉
=a20 + a21 + a22 + a23 + b20 + b21 + b22 + b23 ≥ 0 .(11.57)
Kaip matyti, šis dydis visada yra teigiamas. Jis nusako reliatyvistinės dalelėsaptikimo tikimybę kiekvieno erdvės taško aplinkoje. Bėgančių bangų atveju jisyra vienodas visuose erdvės taškuose.
Dabar išspręsime Diraco lygtį laisvai dalelei vakuume, t. y., kai elektromag-netinio lauko nėra, A = 0. Gautieji sprendiniai aprašo elektroną (dalelę) beipozitroną (antidalelę) ir vaidina svarbų vaidmenį daugelyje reliatyvistinės kvan-tinės mechanikos uždavinių.
11.4.1. Dalelės sprendinys. Laisvą dalelę aprašo plokščia banga (11.53) suneigiama eksponente. Įstatę ją į Diraco lygtį (11.40) ir pastebėję, kad
(∇ψ)Iσ3 = ∇(ψ0e−Iσ3p·x)Iσ3 = pψ0(−Iσ3)e
−Iσ3p·xIσ3 = pψ0e−Iσ3p·x
= pψ , (11.58)
matome, kad impulsiniame atvaizde Diraco lygtis virsta paprasčiausia algebrinelygtimi, į kurią įeina dalelės apibendrintas impulsas p = (E, p),
pψ0 = mψ0γ0 . (11.59)
Šią lygtį perrašę pavidalu p/m = ψ0γ0ψ0, spinorių ψ galėsime interpetuoti kaipstūmio rotorių, kuris nejudančiam elektronui suteikia keturmatį greitį v = p/m.
Suraskime (11.59) lygties sprendinius. Padauginę lygtį iš dešinės iš apgręžtospinoriaus turime
pψ0ψ0 = mψ0γ0ψ0 ≡ mJ , (11.60)
kur J yra keturmatė srovė (11.54). Perskeltos srovės skaliarinė dalis interpretuo-
jama kaip dalelių tankis J ·γ0 = 〈ψ0γ0ψ0γ0〉 = 〈ψ≃ψ〉 = 〈
≃ψψ〉 ≥ 0, kuris visada
yra teigiamai apibrėžtas dydis ir plokščios bangos atveju nuo koordinatės nepri-klauso. Kita vertus, dalelės atveju β = 0, todėl sandauga ψ0ψ0 yra skaliaras,kuris nuo koordinatės nepriklauso ir kurį galima prilyginti vienetui, ψ0ψ0 = 1(normavimas bėgančios bangos atveju). Žinodami, kad tiek p, tiek ir J yra vek-toriai, matome, kad lygtis (11.60) tokiu atveju bus suderinta. Išsprendę iš (11.60)dalelės impulsą gauname
p = mJ = mψ0γ0ψ0 . (11.61)
Kaip jau žinome, reliatyvumo teorijoje vektoriųψ0γ0ψ0 galima interpretuoti kaipketurmatį elektrono greitį (žr. 11.2 lentelę), kuris gaunamas laiko ašies bazinį

290 11 skyrius
vektorių γ0 pasukus rotoriumi ψ0 ≡ S(+). Kitaip tariant, nejudančiai daleleistūmiu suteikus keturmatį greitį v, kaip tai aptarėme 9 skyriuje. Stūmis S(+)
yra laikiškasis rotorius, todėl tenkina sąlygą γ0S(+) = S(+)γ0. Pasinaudoję ja irtuo, kad γ−1
0 = γ0, perrašome (11.61) taip, kad lygtyje susidarytų rotoriaus S(+)
kvadratas:p = m
ÄS(+)ä2γ0, arba
ÄS(+)ä2
= pγ0/m . (11.62)
Su tokio tipo lygtimi jau esame susidūrę anksčiau (žr. (9.44) lygtį), todėl iš kartogalime užrašyti jos sprendinį,
S(+) =m+ pγ0»
2m(m+ p · γ0). (11.63)
Narys pγ0 reiškia impulso perskėlimą, kurio rezultatas yra energija ir trimatisimpulsas: pγ0 = p · γ0+ p∧ γ0 = E+ p. Todėl gautą sprendinį galim perrašytiir taip:
S(+) =E +m+ p»2m(E +m)
. (11.64)
Šis pavidalas leidžia lengvai surasti dispersijos dėsnį, t. y. dalelės energijos pri-klausomybęnuo jos impulso. Iš tiesų, pasinaudojęnormavimo salygaS(+)S(+) =1 bei (11.64) lygtimi randame energiją ir judesio kiekį siejantį sąryšį,
E± = ±»m2 + |p|2 . (11.65)
Dispersijos dėsnis, kaip ir galima buvo tikėtis, sutampa su dalelės energijos tver-mės dėsniu (11.33). Kokį ženklą reika paimti (11.65) lygtyje, nustatysime pasi-naudoję anksčiau aptarta sąlyga dalelių tankui J · γ0 ≥ 0. (11.61) lygtį vidinesandauga padauginę iš γ0 matome, kad turi būtiE ≡ p0 = p ·γ0 ≥ 0, t. y. dalelėsenergija turi būti teigiama. Todėl (11.65) atsakyme turime imti teigiamą šaknį, odalelės dispersijos dėsnis yra
E(+) =»m2 + |p|2 . (11.66)
Kai dalelė juda lėtai, t. y. kai jos impulsas mažas palyginus su dalelės mase(|p|2 ≪ m), iškleidę (11.66) eilute, gauname gerai žinomą nereliatyvistinės da-lelės energijos formulę
E(+) ≈ m+|p|22m
, (11.67)
kurioje, tiesa, energiją pradedame skaičiuoti ne nuo nulio, o nuo dalelės masėsm.Kitu kraštiniu atveju, kai |p|2 ≫ m2, t. y. kai elektronas juda greičiu, artimu
šviesai, iš (11.66) lygties išplaukia, kad E(+) ≈ |p|, t. y. dispersinė lygtis tampapanaši į bemasės dalelės — fotono — dispersijos dėsnį. Toks spektras vadinamas

Diraco lygtis 291
ultrareliatyvistiniu. Įdomu tai, kad šis egzotiškas spektras stebimas grafene —vieno anglies atomų sluoksnio lakšte, kuris, kaip manoma, ateityje taps kvantiniųnanoprietaisų gamybos pamatu.
Jei ψ0 yra Diraco lygties (11.59) sprendinys, tai spinorius −ψ0Iσ2 taip patyra jos sprendinys. Tuo lengva įsitikinti pastebėjus, kad Iσ2 ir γ0 komutuoja.Todėl įstatę −ψ0Iσ2 į Diraco lygtį gausime lygiai tokį patį atsakymą. Tačiau jeiapskaičiuosime tokio spinoriaus sukinį, pamatysime, kad jis nukreiptas priešingakryptimi,
ψ0γ3ψ0 = −(ψ0Iσ2)γ3(‡ψ0Iσ2) . (11.68)
Taigi, Diraco lygtis turi du sprendinius su ta pačia energija, bet jų sukiniai yranukreipti į priešingas puses. Tokie sprendiniai vadinami išsigimusiais.
11.4.2. Antidalelės sprendinys. Laisvą antidalelę atitinka plokščia banga(11.53) su teigiama eksponente. Impulsiniame atvaizde ją aprašo Diraco lygtis
pψ0 = −mψ0γ0 , (11.69)
kurią spręsdami turime atsižvelgti į tai, kad dabar spinoriaus norma yra neigiama,ψ0ψ0 = −1, nes antidalelę atitinka kampas β = π. Tuomet
p = mψ0γ0ψ0 ≡ mJ , (11.70)
ir, išskyrus sąlygąψ0ψ0 = −1, ji visiškai sutampa su (11.61) lygtimi. Padauginęabi jos puses vidine sandauga iš γ0, perrašykime lygtį pavidalu
p · γ0 = (−m)(−J · γ0) . (11.71)
Kadangi J · γ0 > 0, ši lygtis bus teisinga tik tada, jei antidalelės masę ir energijąlaikysime neigiamais dydžiais, t. y. imsime m < 0 ir p · γ0 = E < 0. Pažymėjęψ0 = S(−)I ir vėl pasinaudoję tuo, kad S(−) yra stūmis, γ0S(−) = S(−)γ0, beipatogumo dėlei peržymėję m → −m (tada masė visur bus teigiama), kaip iranksčiau galime rašyti
p = −mÄS(−)I
ä2γ0, arba
ÄS(−)ä2
= pγ0/m . (11.72)
Sprendinys, kaip ir anksčiau, yra lygiai toks pat, S(−) = S(+) ≡ S(±). Tačiau,kadangi sprendinio normavo sąlyga nepasikeitė, S(±)S(±) = 1, o energija taponeigiama, tai norėdami gauti lygybę dabar dispersijos dėsnyje turime pasirinktineigiamą šaknį,
E(−) = −»m2 + |p|2 . (11.73)
Kitą išsigimusį sprendinį, su sukiniu nukreiptu į priešingą pusę, vėl gaunamepaėmę −ψ0Iσ2.

292 11 skyrius
11.1 pav. Laisvojo elektrono irpozitronoenergijos priklausomybėnuo impulso. Draustinės juostostarpas ties |p| = 0 yra 2m, t. y. dvielektrono masės. Elektrono ir po-zitrono dispersijos šakos yra dvi-gubai išsigimusios, nes kiekvienaiš jų vaizduoja dvi sukinio būse-nas. Punktyrinės linijos vaizduojaultrareliatyvistinį spektrą
Rotorius S(±) užrašysime eksponentiniupavidalu. Tai nesunku padaryti prisiminus im-pulsoperskėlimo rezultatąp·γ0 = E ir p∧γ0 =p = p1σ1 + p2σ2 + p3σ3. Todėl p/|p| ≡ σ,
kur |p| =√p2 =
»p21 + p22 + p23, elgiasi
kaip vienetinis laikiškasis bivektorius, t. y. jokvadratas yra σ2 = 1. Pasinaudoję šiomis sa-vybėmis bei dispersijos formulėmis (11.66) ir(11.73) gauname
S(±) =
E +m
2m+ σ
E −m
2m, (11.74)
kur E > m ir E laikome teigiama tiek dale-lėms, tiek ir antidalelėms. Kadangiσ2 > 0, tairotorių S(±) galima užrašyti eksponentiniu pa-vidalu, kurio rodiklyje stovi laikiškasis bivek-torius,
S(±) = exp
(σArth
E −m
E +m
). (11.75)
Dalelės ir antidalelės dispersijos, kurios dar vadinamos lygties spektru, pavaiz-duotos 11.1 paveiksle. Keturias galimas būsenas nusako keturi spinoriai,
ψ(+)↑,↓ (x) =S(±)U↑,↓e
−Iσ3p·x, (11.76a)
ψ(−)↑,↓ (x) =S(±)U↑,↓Ie
Iσ3p·x, (11.76b)
tenkinantys savybes
ψ(+)↑,↓ ψ
(+)↑,↓ =1, (11.77a)
ψ(−)↑,↓ ψ
(−)↑,↓ =− 1 . (11.77b)
Formulėse (11.76) įvedėme pažymėjimus U↑ = 1 ir U↓ = −Iσ2.Sudarę spinorių ψ(+)
↑ ir ψ(+)↓ superpoziciją, gausime dalelę, kurios sukinys
bus nukreiptas bet kuria pageidaujama kryptimi. Iš gautų lygčių matome, kadstūmis S(±) nusako banginės funkcijos evoliuciją, o išraiška S(±)γµS
(±) dalelėsir jos sukiniokinematiką. Kadangi erdvėlaikyje galime sukonstruoti šešias nepri-klausomas plokštumas, bendras rotorius turi šešis realius parametrus. Eksponen-tė ρeIβ prideda dar du: tikimybinį daugiklį ρ (žr. tekstą po (11.20) formulės) irsuperpozicijos dalelė-antidalelė santykį erdvėlaikio taške x. Taigi, iš viso turime

Diraco lygtis 293
aštuonis parametrus: tiek nepriklausomų parametrų turi reliatyvistinis spinorius.Dalelės ir antidalelės atveju turime β = 0 arba π, todėl dalelės spinorių galimasunormuoti į vienetą.
Išreikštines spinorių formules (11.76) dalelei bei antidalelei galima apibend-rinti ir tuo atveju, kai dalelės greitis ir sukinys nukreipti iš anksto užduotomiskryptims,
ψ =ÄρeIβ
ä1/2S(±)(v) R(θ, φ, χ) .
Normavimo Stūmis Rotoriusamplitudė greičiui v sukiniui
pasiekti nukreipti
(11.78)
Čia, kaip ir anksčiau, ρ nusako tikimybę surasti dalelę taško x aplinkoje. Dalelęatitinka β = 0, o antidalelę β = π vertės. Stūmio S(±) ir sukinio R rotoriai yranormuoti į vienetą, S(±)S(±) = 1 ir RR = 1.
11.5 pavyzdys. Pasinaudoję užrašytais spinoriais apskaičiuokime keturmatę Diracosrovę (11.54). Po nesudėtingos aritmetikos gauname
J = ψ(+)↑,↓ γ0ψ
(+)↑,↓ = γ0
1 +
p21 + p22 + p23m2
+p1γ1 + p2γ2 + p3γ3
m. (11.79)
Perskėlus srovę narys su kvadratine šaknim duos tikimybės tankį J0 = J · γ0 , o kitasnarys — dalelės greitį, v ≡ J ∧ γ0 = (p1σ1 + p2σ2 + p3σ3)/m = p/m. AntidaleleiJ0 išliks toks pat, tačiau greičio ženklas pasikeis į priešingą. Taigi, antidalelę galimaįsivaizduoti kaip dalelę, kuri pasauline trajektorija juda priešinga kryptimi, t. y. priešlaiko tėkmės kryptį.
11.6 pavyzdys. Apskaičiuokime dalelės sukinį (11.31), kai R = ψ(+)↑ . Po perskėlimo
turime
s · γ0 = p3/m ,
s ∧ γ0 ≡ s =(σ1p1p3 + σ2p2p3 + σ3(p
23 +mµ)
)/(mµ) ,
(11.80)
kur µ = m +√m2 + |p|2. Jei impulsas yra statmenas kvantavimo ašiai γ3, t. y. jei
p3 = 0, tada sukiniui gauname s = σ3, kurį dar reiktų padauginti iš ~/2. Kitaip tariant,šiuo atveju sukinys trimatėje erdvėje yra lygiagretus σ3 ašiai.
Jei norime sukinį nukreipti kita pageidaujama kryptimi, reikia imti būsenų su prie-
šingais sukiniais superpoziciją aψ(+)↑ + bψ
(+)↓ , kurioje parenkant koeficientus a ir b ga-
lime keisti sukinio kryptį. Koeficientai a ir b nebūtinai turi būti gryni skaliarai. Jie galiturėti ir pseudoskaliarinę dalį. Tokie koeficientai atitiktų kompleksinius koeficientus tra-diciniame Diraco matricų formalizme.

294 11 skyrius
Krintanti (i) Atsispindėjusi (r) Praėjusi (t)
ψi↑ = ρpS(+)(p3)1e
−Iσ3p3z ψr↑ = ρpS(+)(p3)1e
Iσ3p3zr↑ ψt↑ = ρqS(+)(q3)1e
−Iσ3q3zt↑ψr↓ = −ρpS(+)(p3)Iσ2e
−Iσ3p3zr↓ ψt↓ = −ρqS(+)(q3)Iσ2eIσ3q3zt↓
pi = Epγ0 + p3γ3 pr = Epγ0 − p3γ3 qt = Eqγ0 + q3γ3
11.3 lentelė. Krintanti į barjerą, atsispindėjusi ir praėjusi bangos. Paskutinėje ei-lutėje įrašyti jų keturmačiai impulsai. ρp,q =
√Ep,q/(Ep,q +m) yra normavimo
amplitudė
11.5. Atspindys nuo potencinio laiptelio
Sprendinys (11.76) aprašo Diraco elektroną tuo atveju, kai elektromagneti-nių šaltinių nėra, t. y. kai keturmatis vektorinis potencialas lygus nuliui, eA =eAµγµ = 0. Dabar laikysime, kad vektorinis potencialas turi nenulinę skalia-rinę dalį, A0γ0 6= 0. Šio nario pavidalas yra toks pats, kaip masės nario Di-raco (11.59) lygtyje. Todėl modifikuotos lygties sprendimo būdas nė trupučionepasikeis. Toliau dydį A0 = A0 žymėsim kaip eV , kur V yra elektrostatinispotencialas. Diraco lygtį tada galima užrašyti taip:
(E − eV )ψ = −∇ψIσ3 +mγ0ψγ0, ∇ = γk∂k , k = 1, 2, 3 . (11.81)
Ją išsprendę gautume tą patį (11.76) atsakymą, kuriame energijaE būtų pakeistadydžiuE−eV . Pasinaudosime šiuo sprendiniu elektrono atspindžiui nuo poten-cinio barjero apskaičiuoti.
Paimkime aukščio V potencinį laiptelį, kuris pavaizduotas 11.2 paveiksle.Tegu elektronas, kurio impulsas p3 yra lygiagretus z ≡ x3 ašiai, krinta statmenailaipteliui. Kiti elektrono impulso sandai tuomet lygūs nuliui,p1 = p2 = 0. Mūsųtikslas yra apskaičiuoti elektrono atspindžio ir prasiskverbimo pro barjerą, kuris
11.2 pav. Elektrono, kurio pilnaenergija Ep, o impulsas p, prasi-skverbimas ir atspindys nuo V dy-džio potencinio barjero
yra taške z = 0, tikimybes. Prieš barjerą,z < 0, elektrono impulsas yra p = p3σ3, okinetinė energijaEp−m > V . Kitoje barje-ro pusėje, z > 0, impulsas yra q ir kinetinėenergija Eq −m, kaip parodyta 11.2 pav.
Kaip jau žinome, laisvo elektrono ener-gija yra išsigimusi pagal sukinio kvantinįskaičių. Laikykime, kad sukinys nukreiptasarba išilgai z ašies ↑, arba jai priešinga kryp-timi ↓. Šias kryptis atitinka rotoriai R = 1ir R = −Iσ2. Tegu krintančios (i) (nuoangl. incident) vienetinės amplidudės elekt-roninės bangos sukinys yra ↑. Atsispindėju-

Diraco lygtis 295
sios ir praėjusios bangų amplitudes pažymėsim raidėmis r↑,↓ (nuo angl. reflec-
ted) ir t↑,↓ (transmitted). Kaip matome iš 11.1 lentelės, ieškomus kompleksi-nius koeficientus prie tradicinių spinorių keičiame pagal taisyklę (a+ ib)|ψ〉 ⇔ψ(a+bIσ3). Čia a ir b yra realieji skaičiai, kuriuos reikia surasti. Todėl geomet-rinės algebros kalba užrašyti atspindžio ir praėjimo koeficientai atitinkamai yrar↑,↓ = r′↑,↓ + Iσ3r
′′↑,↓ ir t↑,↓ = t′↑,↓ + Iσ3t
′′↑,↓. Kaip matome iš keitimo taisyk-
lės, koeficientus reikia rašyti spinoriaus gale. Taigi, iš viso egzistuoja penkios11.3 lentelėje surašytos bangos. Stūmis S(+) visoms joms suteikia atitinkamątrimatį impulsą, kurio sandai yra ±p3 ir +q3, o taip pat pakeičia jų energijas įE2p = m2+p2 irE2
q = m2+q2. Pastebėsim, kad lentelėje 11.3 užrašyti reliaty-vistiniai spinoriai nėra ortogonalūs (jų vidinė sandauga nelygi nuliui), kaip tai yraįprasta tradiciniame kvantinės mechanikos formalizme. Po erdvėlaikio perskėli-mo jie aprašo į priešingas puses nukreiptus sukinius (11.68) trimatėje erdvėje.Pavyzdžiui, perskėlę keturmatį sukinį ψt↑,↓γ3ψt↑,↓ gauname tokį 3D erdvės vek-torių:
〈ψt↑,↓γ3ψt↑,↓γ0〉1 = ±EpEq(t
′2↑,↓ + t′′2↑,↓)
m(Eq +m)σ3 . (11.82)
Diraco lygtis yra pirmos eilės diferencialinė lygtis, todėl nežinomus koefici-entus galime surasti vien iš spinoriaus tolydumo barjere salygos,
ψi↑ + ψr↑ + ψr↓ = ψt↑ + ψt↓, kai z = 0 , (11.83)
kuri sulygina vienoje ir kitoje barjero pusėje pasirodančius spinorius. Kadangilyginame koeficientus atskirai prie kiekvieno iš bazinių elementų, multivektori-nė (11.83) lygtis yra ekvivalentiška aštuonioms realioms lygtims, t. y. lygčių yratiek, kiek ir nežinomų reliatyvistinio spinoriaus koeficientų. Spinoriaus tolydu-mo (11.83) lygtis dar kartą akivaizdžiai parodo, koks matematiškai glaustas yrafizikinių savybių aprašymas geometrinėje algebroje. Pavyzdžiui, sulyginę ska-liarines (11.83) multivektoriaus dalis ir koeficientus prie σ3 bei Iσ3 gaunametokias tris algebrines lygtis:
1 + r′↑ − t′i↑ = 0 , (11.84a)
(1− r′↑)
√Ep −m√Ep +m
− t′↑
√Eq −m√Eq +m
= 0 , (11.84b)
√Ep −m√Ep +m
r′′↑ +
√Eq −m√Eq +m
t′′↑ = 0 . (11.84c)
Likusios penkios lygtys yra panašios į (11.84c). Išsprendę šią lygčių sistemą ma-tome, kad daugelis koeficientų yra tiesiog nuliai. Nenulinius sprendinius duoda

296 11 skyrius
tik dvi sukabintos lygtys, (11.84a) ir (11.84b), kurių sprendiniai yra
1 + r′↑ = t′↑ , (11.85a)
t′↑ = 2(1 +
√Ep +m√Ep −m
√Eq −m√Eq +m
)−1= 2
(1 +
Ep +m
|p||q|
Eq +m
)−1.
(11.85b)
Iš jų matome, kad elektronui statmenai krintant į potencinį barjerą tiek praėjusios,tiek ir atsispindėjusios bangos sukinys nepasikeičia. Tačiau galima parodyti, kadelektronui krintant į barjerą kampu, atsiranda ir priešingo sukinio atsispindėjusiir praėjusi bangos. Kai elektrono kinetinė energija maža, |p|, |q| ≪ m, tuometpilna energija apytiksliai lygi elektrono rimties masei ir galime rašytiEp,q+m ≈2m. Tokiu atveju atspindžio ir praėjimo koeficientai, (11.85a) ir (11.85b), pereinaį gerai žinomas Schrödingerio kvantinės mechanikos formules,
r↑ ≈|p| − |q||p|+ |q| , t↑ ≈ 2|p|
|p|+ |q| . (11.86)
Kitu kraštiniu atveju, kai Ep,q ≫ m, matome, kad r↑ → 0 ir t↑ → 1, t. y. tokselektronas, kaip ir reikėjo tikėtis, net nepajunta, kad jo kelyje buvo sukurtas po-tencinis barjeras. Ultrareliatyvistiniu atveju, kai |p|2 ≫ m (žr. 11.1 pav.), Diracolygtis numato labai neįprastą reiškinį. Būtent, įgreitintas iki artimo šviesai grei-čio ultrareliatyvistinis elektronas pralekia kiaurai pro bet kokio aukščio barjerą.Net ir tada, kai barjeras yra aiškiai aukštesnis už pilną elektrono energiją! Įdomutai, kad šiam reiškiniui stebėti nereikia jokių didžiulių greitintuvų. Pakanka pasi-gaminti grafeno lakštą, kuriame, kaip yra žinoma, elektronų ir pozitronų (kietojokūno fizikoje jie vadinami skylėmis) spektras yra ultrareliatyvistinis. Taigi, pra-ėjimo kiaurai barjerą reiškiniui stebėti eksperimente pakanka vos elektronvoltodydžio energijos elektronų.
11.6. Kitos reliatyvistinės lygtys
Be Diraco lygties, kuri fizikoje vaidina išskirtinį vaidmenį, yra naudojamos irkitokios reliatyvistinės lygtys. Šių lygčių kairės pusės vienaip ar kitaip susijusiossu Diraco operatoriumi lygtyje (11.40), o dešinėje lygčių pusėje stovi kokio norslauko šaltinis. Užrašysime jų pavidalus geometrinėje algebroje.
11.6.1. Kleino ir Gordono lygtis. Tai yra Schrödingerio lygties reliatyvisti-nis variantas, kuriame svarbiausią vaidmenį vaidina skaliarinis operatorius∇2 =∂2/∂t2 − ∂2/∂x2 − ∂2/∂x2 − ∂2/∂z2,
∇2ψ = −mψ , KLEINO-GORDONO LYGTIS (11.87)

Diraco lygtis 297
Schrödingerio Paulio-Schrödingerio DiracoTvistoriailygtis lygtis lygtis
Cl0,1 ⊂ Cl3,0 ⊂ Cl1,3 ⊂ Cl2,4
11.4 lentelė. Svarbiausių kvantinės mechanikos lygčių klasifikacija pagal Clif-fordo algebras
ir kuriojem žymi dalelės masę. Ji aprašo skaliarinius ir pseudoskaliarinius lau-kus, t. y. tokius, kurių kvantai neturi sukinio.
11.6.2. Maxwello lygtis. Priminsime, kad reliatyvistinis jos pavidalas yra
∇F = J , (11.88)
į kurį įeina bivektorinis laukas F . Vektorinio operatoriaus ir bivektoriaus san-dauga kairėje pusėje sako, kad dešinėje pusėje esantis šaltinis J turėtų būti vek-toriaus ir trivektoriaus suma. Kadangi magnetinių monopolių gamtoje kol kasneaptikta, tai J Maxwello lygtyje laikomas keturmačiu vektoriumi. Jei įvesimeelektromagnetinį potencialą (vektorių)
A = A0γ0 + A1γ1 +A2γ2 +A3γ3 , (11.89)
ir papildomai pareikalausime, kad vektorių ∇ ir A vidinė sandauga būtų lyginuliui,
∇ ·A = ∂0A0 + divA = 0 , (11.90)
tada sandauga ∇A, kaip ir laukas F , bus grynas bivektorius. Sąlyga (11.90) yravadinama Lorentzo kalibruote. Maxwello lygtis Lorentzo kalibruotėje užrašomataip:
∇A = −F , ∇F = J . (11.91)
Abi šias lygtys smulkiai aptarėme 10 skyriuje.
11.6.3. Proca lygtys. Proca lygtys aprašo erdvėlaikyje šviesos greičiu sklin-dančias daleles, kurių masė m, o sukinys vienetas. Proca lygtys gaunamos išMaxwello lygčių (11.91), dešinėje pusėje pridėjus masės m šaltinį,
∇A = −F , ∇F = m2A+ J . PROCA LYGTYS (11.92)
Tokia konstrukcija remiasi dviem kvantinės mechanikos idėjomis. Pirma, dalelėsmasė padauginta iš potencialo veikia kaip naujas šaltinis. Antra, išreikštai įvestamasė (skaliaras) pažeidžia lokalų (kalibruotinį) invariantiškumą (broken gauge
symmetry), todėl dabar Faraday’jaus bivektorius F potencialą A nusako pilnai(nelieka pasirinkimo laisvės). Iš lygčių (11.92) eliminavus F , Proca lygtį galimaužrašyti viena lygtimi, ∇2(A+m2) = −J .
298 11 skyrius
11.4 lentelėje surašėme svarbiausias geometrines algebras, skirtas kvantineimechanikai aprašyti. Paprasčiausia iš jų yra Cl0,1, kuri aprašo elektroną be su-kinio. Ji turi vieną bazinį elementą e1, kurio kvadratas e21 = −1 ir kuris atliekamenamojo vieneto i =
√−1 vaidmenį. Schrödingerio lygtis ir ją nusakanti al-
gebra Cl0,1 geba aprašyti tik erdvinį elektrono kvantavimą.Cl3,0 algebra jau gali aprašyti ir elektrono sukinį, o šios algebros lygtis vadi-
nama Schrödingerio-Paulio lygtimi. Mes ją nagrinėjom 8 skyriuje. Ši lygtis turivieną išskirtinę ašį σ3, kurios atžvilgiu kvantuojame elektrono sukinį. Erdviniskvantavimas išlieka toks, kaip ir Cl0,1 algebroje.
Cl1,3 algebra aprašo reliatyvistinį elektroną ir pozitroną. Šios algebros lygtisyra Diraco lygtis, kurią nagrinėjome 11 skyriuje. Jos sprendiniai yra spinoriai,kurie turi dvi išskirtines erdvėlaikio kryptis, γ0 ir γ3. Pirmoji, po Lorentzo stū-mio, nusako elektrono/pozitrono judėjimo greitįRγ0R, o antroji — sukiniokryptįRγ3R.
Cl2,4 algebra aprašo persuktą šešiamatį erdvėlaikį, kurio baziniai vektoriaivadinami tvistoriais. Tvistorius 1967 metais įvedė R. Penrose’as. Jie gali būtisvarbūs kuriant kvantinės gravitacijos teoriją.

12. Clp,q algebros
Ankstesniuose skyriuose susipažinome su fizikoje plačiausiai taikomomisgeometrinėmis algebromis, būtent Cl3,0 ir Cl1,3. Tačiau tikrąsias geometrinėsalgebros taikymo fizikoje ir kitose srityse galimybes galėsime suprasti tik susida-rę bendresnį vaizdą. Todėl skyriuje glaustai aptarsime bendrąsias Clp,q Cliffordoalgebras, paaiškinsime, kaip dauginti bendro pavidalo multivektorius ir sufor-muluosime keletą svarbių teoremų, — tarp jų geometrinių algebrų periodiškumoteoremą, kuri parodo, kaip šias algebras taikyti įvairių dimensijų erdvėse.
12.1. Multivektorius ir jo dalys
Visas geometrines algebras galima suklasifikuoti bent dviem būdais. Vienaklasifikacija remiasi taip vadinama Cliffordo algebrų periodiškumo teorema, ku-rią aptarsime truputį vėliau. Kiek paprastesnis yra algebrų skirstymas pagal jųpseudoskaliarų savybes, kuris dar vadinamas struktūriniu periodiškumu. Nuo joir pradėkime pažintį su bendromis geometrinėmis algebromis.
12.1.1. Pseudoskaliaras. Pirmuose knygos skyriuose geometrinę algebrąkonstravome iš tiesinės erdvės bazinių vektoriųe1, e2, . . . , en, kurn žymėjo vek-torinės erdvės dimensiją. Kadangi baziniai vektoriai yra nepriklausomi, tai visųjų išorinė sandauga yra algebros pseudoskaliaras I = e1∧e2∧· · ·∧en, kurį lai-kysime normuotu į vienetą, I2 = ±1 (išsigimusio atvejo, kai I2 = 0, neaptarinė-sime). Jei be šios išorinės sandaugos dar nurodysime, kam lygūs bazinių vektoriųkvadratai (užduosime metriką), tuo pačiu pilnai nusakysime ir geometrinę algeb-rą. Visada galime manyti, kad pseudoskaliarą sudaro ortogonalūs ir normuoti,arba trumpiau — ortonormuoti, baziniai vektoriai. Jei būtų kitaip, tokius vek-torius pasigamintume pritaikę Grammo-Schmidto ortogonalizavimo procedūrą,kurią aptarsime kiek vėliau. Ortonormuotus bazinius vektorius ej sutarta išri-kiuoti tokia tvarka, kad indeksai j = 1, . . . , p žymėtų vektorius, kurių kvadratasyra teigiamas, o nuo p+ 1 iki p+ q = n — tuos, kurių šis kvadratas neigiamas:
e2j =
1 kai j = 1, . . . , p
−1 kai j = p+ 1, . . . , p+ q .(12.1)
299

300 12 skyrius
Atitinkamarealios vektorinės erdvėsRp,q geometrinė algebra žymima Clp,q. Vek-toriaus kvadrato ženklas, plius arba minus (nulinio kvadrato vektorių neaptarinė-sime), vadinamas vektoriaus signatūra, o skirtumas (p−q) — algebros signatūra.Pavyzdžiui, Minkowskio erdvėlaikį aprašėme Cl1,3 algebra, kurios signatūra ly-gi −2. Algebra Clp,0, kurios visų vektorių signatūros yra teigiamos, vadinamaeuklidine, o jei visų neigiama, Cl0,q, — antieuklidine. Bendru atveju algebraClp,q yra neeuklidinė.
Pseudoskaliaro kvadratas ir tai, ar jis komutuoja ar antikomutuoja su laisvaiparinktu vektoriumi a, visas algebras, kurių realios vektorinės erdvės Rp,q di-mensija n = p + q ir signatūra p − q, leidžia suskirstyti į keturias grupes arbastruktūrinius tipus (p− q) (mod 4) remiantis šiais pastebėjimais:
aI =− Ia ⇔ n = p+ q yra lyginis, (12.2a)
aI = Ia ⇔ n = p+ q yra nelyginis, (12.2b)
I2 =1 ⇔ p− q ≡ 0 (mod 4) arba p− q ≡ 1 (mod 4), (12.2c)
I2 =− 1 ⇔ p− q ≡ 2 (mod 4) arba p− q ≡ 3 (mod 4). (12.2d)
Užrašas p−q ≡ k (mod 4) čia reiškia dalybą moduliu4, kuris ir yra struktūrinėsklasifikacijos periodas. Dalybos liekana k, kuri gali būti 0, 1, 2 arba 3, nusakoalgebros struktūrinį tipą. Kaip vėliau matysime, pačių Cliffordo algebrų periodasyra ne 4, o 8.
12.1 pavyzdys. Apskaičiuokime Cl1,3 ir Cl3,1 algebrų struktūrinį tipą. Cl1,3 atvejuturime (1 − 3) (mod 4) = (5 − 3) (mod 4) = 2. Tą patį atsakymą gauname ir Cl3,1algebrai: (3 − 1) (mod 4) = 2. Be to, abiems algebroms n = 1 + 3 = 3 + 1 = 4,todėl struktūriniuarba pseudoskaliaro savybiųpožiūriu abi algebros yra vienodos. Pačiosgeometrinės algebros Cl1,3 ir Cl3,1, kaip vėliau matysime, nėra izomorfiškos, t. y. jųelementų daugybos lentelės nesutampa, bet kadangi abiejų algebrų struktūrinis tipas yratas pats, tai abi jos naudojamos reliatyvumo teorijai aprašyti. Palyginimui, Cl3,0 ir Cl0,3algebroms turimen = 3+0 = 0+3 = 3, tačiau algebrų struktūriniai tipai yra atitinkamai3 ir 1, taigi, skiriasi.
Žinant vektorinės erdvės dimensiją n = p+ q ir vektorių su neigiama signa-tūra skaičių q, nesunku išvesti pseudoskaliaro kvadrato formulę
I2 = (−1)n(n−1)/2(−1)q. (12.3)
Čia pirmasis daugiklis atsižvelgia į bazinių vektorių perstatymų skaičių, o antra-sis įskaito neigiamos signatūros vektorių ženklus. Padauginę (12.3) iš I−1 ne-sunkiai surandame atvirkštinio pseudoskaliaro išraišką
I−1 = (−1)n(n−1)/2(−1)qI. (12.4)

Clp,q algebros 301
12.1.2. Homogeninis ir dualus multivektorius. Vektorinėje n = p+ q di-mensijų erdvėje galima išskirti atskirus poerdvius: vienmatį, kurį sudaro vekto-riai arba pirmojo rango elementai, dvimatį, kuriame „gyvena“ orientuoti paviršiai(bivektoriai) arba antrojo rango elementai, trimatį, kuriam priklauso orientuotitūriai (trivektoriai) arba trečiojo rango elementai ir t. t. Pseudoskaliaras I yraaukščiausio rango elementas, kurio rangas lygus n = p+ q.
Bendras multivektorius A yra įvairaus rango elementų suma,
A = 〈A〉0 + 〈A〉1 + · · · =n∑
r=0
〈A〉r, (12.5)
kur sumuojama per visus galimus rangus nuo skaliaro iki pseudoskaliaro. Šisuma yra formali, nes skirtingo rango elementai sumoje nesimaišo. Kampiniaiskliaustai su rango indeksais apačioje interpretuojami kaip filtrai, kurie išskiriaar išprojektuoja nurodyto rango elementus. Todėl dažnai jie vadinami tiesiogrango projektoriais. Praktikoje tokie rango filtrai arba projektoriai dažnai su-konstruojami sudarius tam tikrą multivektoriaus sumų ir sandaugų kombinaciją.Postuluojama, kad 〈A〉m = 0, jei m viršija vektorinės erdvės dimensiją n.
Homogeninį multivektorių 〈A〉k (paprastai sakome k-tojo rango multivekto-rių) sudaro to paties rango sandai, kurių skaičių nusako darinių iš n po k formulė
n!k!(n−k)! . Iš jos matyti, kad R
p,q erdvėje turim n vektorių (k = 1), n(n−1)2 bivek-
torių (k = 2) ir t. t.Iš skirtingo rango elementų sudarytas multivektorius vadinamas nehomoge-
niniu. Bendriausias Clp,q algebros nehomogeninis multivektorius turin∑
k=0
n!
k!(n− k)!= 2n (12.6)
sandų arba bazinių elementų.
12.2 pavyzdys. Bendriausias reliatyvumo teorijos Cl1,3 algebros multivektoriaus pa-vidalas yra
A = 〈A〉0 + 〈A〉1 + 〈A〉2 + 〈A〉3 + 〈A〉4 , (12.7)
kur skaliaras 〈A〉0 ir pseudoskaliaras 〈A〉4 turi tik po vieną narį. Vektorius 〈A〉1 ir pseu-dovektorius 〈A〉3 daugiausia gali turėti keturis, o bivektorius 〈A〉2 (antro rango elemen-tas) net šešis sandus. Taigi, didžiausias bet kokio rango sandų arba bazinių algebroselementų skaičius šioje algebroje yra 1 + 4 + 6 + 4 + 1 = 16 = 24.
12.3 pavyzdys. Cl3,0 algebros bendro pavidalo nehomogeninis multivektorius yraA = 〈A〉0 + 〈A〉1 + 〈A〉2 + 〈A〉3. Paėmę multivektorių A = a0 + a1e1 + a2e2 +a3e3 + b1e12 + b2e23 + b3e31 + ce123, parodykite, kad rango projektorius šioje algeb-roje apibrėžia, pavyzdžiui, tokios sumų ir sandaugų kombinacijos: 〈A〉0 = −I(A ∧ I),〈A〉4 = −I ∧ (A · I), 〈A〉1 = 1
2(A+ A)− 〈A〉0, 〈A〉2 = 1
2(A− A)− 〈A〉4.

302 12 skyrius
12.1 pav. Dualumo schemaCliffordo algebroje
Aptarkime multivektoriaus ir pseudoskalia-ro geometrinę sandaugą. Pseudoskaliarą I irhomogeninį k rango multivektorių 〈A〉k galimaperstatyti vietomis pagal taisyklę
I〈A〉k = (−1)k(n−1)〈A〉kI, (12.8)
nes kiekvienas 〈A〉k bazinis vektorius, perkel-tas per n − 1 kitų pseudoskaliarą sudarančiųvektorių (išskyrus save patį), pakeičia ženklą.Kadangi atliekame k tokių perkėlimų, tai žen-klas pasikeičia k(n−1) kartų. Todėl (12.8) for-mulė leidžia daryti bendrą išvadą, kad nelygi-nės dimensijos erdvėse (tuomet n − 1 yra lygi-nis) pseudoskaliaras komutuoja su visais algeb-ros elementais, o kai dimensija lyginė, jis komu-tuoja su lyginio ir antikomutuoja su nelyginio
rango elementais. Atvirkštinis pseudoskaliaras yra svarbus apibrėžiant dualiusalgebros elementus. Multivektoriui A dualiu vadinamas multivektorius ⋆A, gau-namas jį iš dešinės padauginus iš I−1,
⋆A = AI−1 . DUALUS MULTIVEKTORIUS (12.9)
Pavyzdžiui, Cl3,0 algebroje bivektoriui e12 dualus yra ⋆e12 = (e1e2)I−1 =
(e1e2)(e3e2e1) = e3 vektorius. Ką daro dualumo transformacija Cliffordo al-gebroje vaizdžiai parodo 12.1 paveikslo diagrama. Iš jos matome, kad teoriškaivisus apskaičiavimus galima atlikti naudojant tik pusę geometrinės algebros ran-gų. Kitą pusę galima pasigaminti padauginus iš I−1. Taip, pavyzdžiui, ir daromap formų algebroje, kuri yra gimininga geometrinei algebrai. Joje naudojama tikapatinė 12.1 diagramos pusė , o viršutinė (duali) gaunama prie apatinės pridėjusžvaigždutę, kuri vadinama Hodge’o žvaigždute (angl. Hodge star).
12.4 pavyzdys. Parodysime, kad dualumo operacija nėra involiucija. Iš tiesų, du kar-tus pritaikę dualumo operaciją multivektoriuiA gauname
⋆⋆A = ⋆(AI−1) = AI−1I−1 = A(II)−1 = AI2 = ±A. (12.10)
Jei pseudoskaliaro kvadratas neigiamas, gauname priešingo ženklo multivektorių, todėlHodge’o dualumo operacija, apskritai kalbant, nėra involiucija.
12.1.3. Mentė. Prisiminkime ir apibendrinkime dar vieną labai svarbią geo-metrinės algebros sąvoką — mentę (angl. blade). k-tojo rango mente vadinsimek vektorių išorinę sandaugą ir žymėsime simboliu Ak,
Ak = a1 ∧ a2 ∧ · · · ∧ ak . MENTĖ (12.11)

Clp,q algebros 303
Pavyzdžiui,A3 = a∧b∧c yra mentė nepriklausomai nuo erdvės dydžio (n ≥ 3)ir algebros signatūros. Tačiau mentę nebūtinai visada sudaro tik viena išorinėsandauga. Tai gali būti ir išorinių sandaugų suma, kurią įmanoma „sutraukti“ įvieną išorinę sandaugą. Pavyzdžiui, trijų tarpusavyje ortogonalių vektorių a, bir c kombinacija a ∧ b + a ∧ c + b ∧ c yra mentė, nes ją galima užrašyti kaipneortogonalių vektorių (a+ b) ir (b+ c) išorinę sandaugą: (a+ b) ∧ (b+ c) =a ∧ b + a ∧ c + b ∧ b + b ∧ c = ab + ac + bc. Kadangi, griežtai kalbant,ne kiekvienas homogeninis multivektorius 〈A〉k yra mentė, tai mentėms žymėtitenka įvesti anksčiau paminėtą atskirą simbolį Ak .
12.5 pavyzdys. Parodysime, kad keturmatėse ir aukštesnių dimensijų erdvėse homo-geninis multivektorius ne visada yra mentė. Paimkime keturmatės euklidinės erdvės al-gebrą Cl4,0, kurioje iš šešių bivektorių, arba nelygiagrečių plokštumų, galima sudarytihomogeninį antro rango multivektorių
B = αe1 ∧ e2 + βe3 ∧ e4, (12.12)
kur α ir β yra skaliarai. Užrašytas bivektorius B nėra mentė. Kitaip tariant, B nėraorientuotaplokštumos sritis, nes neįmanoma surasti tokių dviejų tiesiškai nepriklausomųvektorių a ir b, kuriuos išoriškai sudauginę gautume bivektorių B = a ∧ b. Tačiaukaip žinome iš 4 skyriaus (žr. 4.1 pav.), tokį bivektorių visada galime rasti trimatėjeerdvėje. Keturmatėje erdvėje, skirtingai negu trimatėje, plokštumos e1 ∧ e2 ir e3 ∧ e4kertasi vieninteliame taške. Tai matyti iš to, kad (12.12) formulėje baziniai vektoriaineturi bendrų indeksų. Trimatėje erdvėje niekada taip neatsitiks, nes dviejų nelygiagrečiųbivektorinių plokštumų sankirta visada yra tiesė.
Geometriškai ai vektorių išorinė sandauga (12.11) reiškia ne ką kitą, kaiphiperplokštumos gabalą. Todėl mentė geometriškai reiškia vieną vientisą orien-tuotą hiperplokštumos dalį. Kita vertus, homogeninis multivektorius gali būtisuprantamas kaip nelygiagrečių ir nesikertančių hiperplokštumų (jų dalių) rinki-nys. Taigi, mentė visada yra homogeninis multivektorius, tačiau ne kiekvienashomogeninis multivektorius yra mentė.
Kam reikalingos mentės? Tuo atveju, kai nežinome (ar nenorime naudo-ti) ortonormuotų bazinių vektorių, erdvėje galime įvesti tiesiškai nepriklausomųvektorių a1, a2, a3, . . ., kurie nebūtinai vienas kitam ortogonalūs ir normuo-ti, bazę. Tada visus orientuotus erdvės objektus patogu užrašyti mentėmis, neskitaip homogeninių vektorių, skirtingai negu ortogonalioje bazėje, sudaryti jaunemokame. Pavyzdžiui, bivektorių A galime užrašyti kaip sandaugų a1 ∧ a2,a2∧a3, a3∧a1 ir t. t. sumą, trivektorių 〈A〉3 išreikšti sandaugomis a1∧a2∧a3 irt. t. Tarp įvairaus rango menčių egzistuoja sąryšiai, leidžiantys suprastintimenčiųkombinacijas ar jas pakeisti paprastesnėmis. Pavyzdžiui, knygos priedo 350 psl.pateikiamos daugybos formulės tarp įvairių menčių tuo atveju, kai užduotas vie-netinis pseudoskaliaras I . Taigi mentės atstoja apibendrintus bazinius elementus.

304 12 skyrius
12.6 pavyzdys. Parodysime, kad jei multivektoriusA yra mentė, tai ir jam dualus mul-tivektorius ⋆A yra mentė. Ir tikrai, kadangi multivektoriaus savybė, ar yra jis mentė arne, nepriklauso nuo pasirinktos koordinačių sistemos, tai visuomet galime paimti orto-normuotus vektorius e1, e2, . . ., kurie multivektorių leidžia užrašyti kaip geometrinęsandaugą A = ke1e2 · · · Papildę ortonormuotų vektorių rinkinį iki visos erdvės bazėsir apskaičiavę šioje bazėje dualų multivektorių gauname
⋆A = AI−1 = ±AI = ±(ke1e2 · · ·ej)(e1e2 · · ·en) = ±(kej+1 · · ·en) . (12.13)
Taigi, dualus multivektorius yra ortonormuotų vektorių sandauga, t. y. mentė. Kadangivektorius pagal apibrėžimą visada yra mentė, tai vektoriams dualūs elementai (pseudo-vektoriai) taip pat visada yra mentės. Trimatėje erdvėje, pavyzdžiui, Cl3,0 algebroje,vektoriams dualūs elementai yra bivektoriai, taigi, trimatėse erdvėse bivektoriai visadayra mentės. Tuo tarpu keturmatėje ervėje, kaip matėme, bivektorius gali ir nebūti mentė,tačiau trivektorius visada yra mentė.
12.7 pavyzdys. Cl1,3 algebros bivektoriausB1 = α1γ10 + α2γ20 + α3γ30 visi bazi-niai bivektoriai turi bendrą indeksą 0. Taigi, akivaizdu, kad jis yra mentė, kurią galimaužrašyti kaip dviejų vektorių išorinę sandaugą: B1 = B1 = (α1γ1+α2γ2+α3γ3)∧γ0.Tuo tarpu bivektoriusB2 = β1γ32+β2γ13+β3γ21, nors iš pirmo žvilgsnio ir nepanašusį mentę, tačiau jį galima užrašyti kaip pseudoskaliaro ir mentės B3 sandaugą: B2 = IB3,kur B3 = β1γ01 + β2γ02 + β3γ03. Taigi, B2 taip pat yra mentė. Todėl Cl1,3 algebrojerotorių R galima sukonstruoti iš dviejų skirtingų laikiškųjų B2
1 > 0 ir B23 > 0 menčių:
R = B1 + IB3.
12.1.4. Versorius. Versorius yra vektorių ai geometrinė sandauga
V = a1a2 · · ·ar . VERSORIUS (12.14)
Ji ypatinga tuo, kad jei sandaugoje nėra nulinio ilgio vektorių, t. y. tokių, kuriųkvadratas yra nulis,a2i = 0, tai versoriuiV visada egzistuoja atvirkštinisversorius
V−1 =V
VV. (12.15)
Kitais žodžiais, versorius tai faktorizuojamas multivektorius, turintis atvirkšti-nį. Todėl versoriai sudaro taip vadinamą algebrą su dalyba (angl. algebra with
division). Pavyzdžiui, dviejų vienetinių vektorių sandauga yra versorius, kurįanksčiau užrašydavome kaip rotorių
V = ab = a · b+ a ∧ b = cos θ +a ∧ b|a ∧ b|
sin θ = exp
Ça ∧ b|a∧ b|
θ
å, (12.16)
kur θ žymi kampą tarp vektorių a ir b. Iš čia matome, kad rotorių kompozicijągalima užrašyti ir kaip lyginio skaičiaus r = 2k, kur k = 1, 2, . . . , vektorių san-daugą. Panašiai yra ir su atspindžiais, kurie užrašomi kaip nelyginio skaičiaus

Clp,q algebros 305
vektorių sandauga. Akivaizdu, kad mentė kartu yra ir versorius, nes kai vekto-riai ai ortogonalūs, išorinė sandauga niekuo nesiskiria nuo geometrinės. Tačiaupriešingas teiginys nėra teisingas. Kaip rodo (12.16) pavyzdys, versorius nėrahomogeninis multivektorius.
Paveikę versoriumiVmultivektoriųX gauname kitą multivektoriųX′ = VXV.Versoriaus pavidalą turi bendriausias ortogonalių transformacijų operatorius, ku-rio atskiri atvejai realizuoja atspindžius, sukimus, stūmius, sraigtinius sukimus,deformacijas bei visas kitas nekeičiančias objekto topologijos transformacijas. Iščia ir jo pavadinimas, nes lotyniškai versāti reiškia sukimąsi, judėjimą. Jei šiastransformacijas realizuotume daugindami ortogonalias matricas, skaičiavimai,ypač daugiamatėse erdvėse, būtų labai neefektyvūs, nes matriciniame skaičia-vime kiekviena tam tikroje bazėje išskleista vektoriaus koordinatė transformuo-jama atskirai. Minėtus apskaičiavimus labai patogu aprašyti versoriais, kurie jautaikomi kompiuterinėje grafikoje ir animacijoje [60].
12.8 pavyzdys. Paimkime euklidinę geometrinę algebrą, pavyzdžiui, Cl4,0, kuriojenėra nulinių vektorių, t. y. tokių, kurių kvadratas nulis, ir raskime sudėtingo multivekto-riaus V = 40e1 +60e2 +9e3 +31e4 + e123 − e124+ 10e134+16e234 atvirkštinį. Jeimėgintume išvesti bendrą atvirkštinio multivektoriaus formulę, panašią į (4.59a), kuriąužrašėme Cl3,0 algebroje, ji būtų labai sudėtinga ir todėl skaičiavimams nepatogi. At-virkštinio multivektoriaus apskaičiavimas labai supaprastėtų, jei pavyktų paminėtą mul-tivektoriųužrašyti kaip versorių. Toks uždavinys vadinamas multivektoriaus faktorizavi-mu. Būdai kaip tai padaryti aptarti, pavyzdžiui, straipsniuose [61, 62] ir knygose [60, 63].Pasinaudojus ten aprašytais algoritmais šį multivektoriųpavyksta faktorizuoti, t. y. užra-šyti kaip versoriųV = a1a2a3 = (2e1+3e2+e3+e4)(e1+e2+4e3+2e4)(e1+e2+3e3+3e4). Kadangi atvirkštiniai vektoriai skaičiuojami labai paprastai, a−1
i = ai/|ai|2,iš karto užrašome atskirų daugiklių atvirkštinius, a−1
1 = 115(2e1 + 3e2 + e3 + e4),
a−12 = 1
22 (e1 + e2 + 4e3 + 2e4) bei a−13 = 1
20(e1 + e2 + 3e3 + 3e4). Sudau-ginę juos priešinga tvarka, lengvai apskaičiuojame multivektoriui V atvirkštinį V−1 =a−13 a−1
2 a−11 = 1
6600(40e1+60e2+9e3+31e4−e123+e124−10e134−16e234).
12.2. Involiucijos
Kaip jau žinome iš 2 skyriaus, involiucija yra vidinė algebros transformacija,kurią pritaikę du kartus gauname identišką (vienetinę) transformaciją. Paprasčiausakant, du kartus ja paveiktas algebros elementas nepasikeičia. Žinoma, kiekvie-nai algebrai tokių transformacijų galima sugalvoti ganėtinai daug, tačiau ne visosinvoliucijos yra universalios ar vienodai svarbios. Apibendrinkime involiucijasbet kokio dydžio ir signatūros geometrinėms algebroms.
12.2.1. Pagrindinės involiucijos. Pagrindines involiucijas, kurių yra trys,būtent, rango inversija, apgrąža ir Cliffordo involiucija, ir kurias galima apibrėž-

306 12 skyrius
InvoliucijaVeikimas į sandaugą Veikimas į mentę Transformacijos
A,B ∈ Clp,q Ck ∈ Clkp,q fizikinė prasmė
Rango inversijos AB = ÛAÛB ÙCk = (−1)kCk Erdvės inversija, P
Apgrąžos AB = BA‹Ck = (−1)
k(k−1)2 Ck Laiko apgrąža, T‹Ck = (−1)dICkI
−1
Cliffordo˜AB = ÛB ÛA ‹ÙCk = (−1)
k(k+1)2 Ck PT
Veikimas įp ir q poerdvius
Kompleksinio Krūviosujungtinumo AB = AB Ap + Aq = Ap − Aq sujungtinumas, C(kai q ≥ 1)
12.1 lentelė. Geometrinės algebros involiucijos ir jų savybės
ti visoms geometrinėms algebroms, surašėme 12.1 lentelėje. Ten pateiktos ir jųveikimo į elementų sandaugą ir homogeninį multivektorių taisyklės, kurias ap-tarėme dar 2 skyriuje. Iš lentelės matome, kad rango inversija daugiklių tvarkąpalieka tą pačią, nors atskirų daugiklių ženklai gali keistis. Tokia algebros trans-formacija į save pačią vadinama automorfizmu. Tuo tarpu apgrąža ir Cliffordoinvoliucija daugiklius išrikiuoja atvirkščia tvarka, todėl šios involiucijos yra al-gebros antiautomorfizmai. Fizikos požiūriu involiucijosaprašo diskretines simet-rijas [64]. Pavyzdžiui, rango inversija yra ne kas kita, kaip erdvės inversija P, oapgrąžos involiucija aprašo laiko apgrąžą T. Tuo tarpu Cliffordo involiucija, kaiprodo jos žymėjimas, yra šių dviejų transformacijų sandauga ir reiškia PT trans-formaciją.
9 skyriuje, aiškindamiesi kaip reliatyvumo teorijos fizikiniai dydžiai susiję suEuklido erdvės atitikmenimis, įvedėme dar vieną involiuciją, kurią pavadinomeerdvėlaikio sujungtinumu. Ji realizuojama keturmatį dydį (vektorių) padauginusarba (bivektorių) apgaubus γ0 baziniais vektoriais. Kadangi γ20 = 1, tai akivaiz-du, jog ši transformacija yra involiucija, vaidinanti svarbų vaidmenį reliativysti-nėje Cl1,3 algebroje. Aptarkime, kaip būtų galima ją apibendrinti bet kokiai Clp,qalgebrai.
12.2.2. Pseudoautomorfizmas arba kompleksinis sujungtinumas. Tradi-ciškai elektrinį krūvį turintys laukai fizikoje aprašomi kompleksinėmis funkcijo-mis. Priešingo krūvio dalelės (antidalelės) tada aprašomos kompleksiškai su-jungtiniu lauku, kurio menamos dalies, o tuo pačiu ir dalelės krūvio ženklas, yra

Clp,q algebros 307
priešingas. Taigi, kitaip negu diskretinės lygiškumo P ir laiko inversijos T simet-rijos, krūvio sujungtinumas nėra erdvėlaikio simetrija.
Kaipgi kompleksinio sujungtinumo transformaciją aprašyti Cliffordo algeb-roje, kurioje visai nėra kompleksinių skaičių? Pasirodo, kad tokią transformacijąnesunku gauti kompleksifikavus Cliffordo algebrą, o po to ją atgal suprojektavusį realią algebrą. Akivaizdu, kad šiuo būdu sukonstruota transformacija jau nėraįprasta algebros transformacija į save pačią, t. y. automorfizmas arba antiauto-morfizmas, todėl vadinama pseudoautomorfizmu.
Paaiškinsime išsamiau. Nors knygoje nagrinėjome tik realias Cliffordo al-gebras, matematikams yra įdomios ir Cliffordo algebros, kurių bazinius elemen-tus ei, kur i = 1, . . . , n, galima dauginti ne tik iš realių, bet ir iš kompleksiniųskaičių. Neprarandant bendrumo galima laikyti, kad visų šių bazinių vektoriųnorma yra teigiama1 e2i = 1, kur i = 1, 2, . . . , n. Paimkime pirmus p vektoriustokius, kokie ir buvo, o likusius q vektorius padauginkime iš tradicinio mena-mojo vieneto. Gausime naują bazę, kurioje neigiamus ženklus pasirinkome dėlpatogumo:
e′1, . . . , e′p, e′p+1, . . . , e′p+q = e1, . . . , ep,−iep+1, . . . ,−iep+q . (12.17)
Skaičių lauko menamas vienetas i komutuoja su baziniais vektoriais, iej = ej i.Bendras tokios algebros vektorius yra
x′ = x1e′1 + · · ·+ xpe
′p + xp+1e
′p+1 + · · ·+ xne
′n . (12.18)
Kadangi bazinių vektorių skaičius nepasikeitė, tai iš kompleksinės Cn erdvėsgalime išprojektuoti realų jos poerdvį Rn. Kompleksifikuotą Cliffordo algeb-rą žymėsim ta pačia raide, kaip ir kompleksinę erdvę, tik su indeksu apačio-je, Cn. Skirtumas toks, kad naujosios bazės (12.17) vektorių kvadratai jau nėravien teigiami, bet ir neigiami, būtent, e′2i = 1, kai 1 ≤ i ≤ p ir e′2i = −1,kai p + 1 ≤ i ≤ p + q. Taigi, jie elgiasi kaip realios Clp,q algebros bazi-niai vektoriai. Raskime (12.18) vektoriaus kvadratą (x′)2. Jį apskaičiuodamigausime tik realius skaičius, nes visos kryžminės sandaugos duos nulį, kadangixixj(eiej + ejei) = 0, kai i 6= j. Taigi, (12.18) vektorius generuoja realiąkvadratinę formą (x′)2 = x21 + x22 + · · ·+ x2p − x2p+1 − · · · − x2p+q , — tokiąpačią, kaip ir reali Clp,q Cliffordo algebra.
Iš čia išplaukia, kad kiekvieną kompleksinės Cliffordo algebros Cn elemen-tą A ∈ Cn galime vienareikšmiškai suskaidyti į realią ir menamą dalis, A =Ap+iAq, kur Ap ir Aq yra realios Cliffordo algebros elementai Ap,Aq ∈ Clp,q.
1Jei būtų kitaip, vietoje tokio bazinio vektoriaus apibrėžtume kitą, padaugintą iš įprasto me-namo vieneto, kurio kvadratas jau būtų teigiamas.

308 12 skyrius
Tuomet abipus vienareikšmis atvaizdis A → A = Ap− iAq transformuoja komp-leksinę Cliffordo algebrą į save pačią. Akivaizdu, kad ši transformacija nekeičiabazinių elementų sumos ir sandaugos. Skiriasi tik daugybos iš skaičiaus ope-racija, kurią pakeitėme daugyba iš kompleksiškai jungtinio skaičiaus. Tokiomissavybėmis pasižymintis Cn algebros atvaizdis į save pačią vadinamas pseudo-automorfizmu, o jo projekcija į realią Cliffordo algebrą ir yra krūvio sujungti-numo involiucija. Kaip matėme 9 skyriuje, pavadinime esantis žodis „krūvis“visai nereiškia, kad transformacija visada privalo būti taikoma vien antidaleliųlaukams gauti. Pavadinimas apeliuoja tik į jos sąsają su kompleksinių dydžių su-jungtinumo transformacija, kuri yra kitokios, nesusijusios su erdvės savybėmis,prigimties, diskretinė simetrijos operacija.
12.3. Sandaugos geometrinėje algebroje
Kaip matėme, geometrinėje algebroje apibrėžiama visa eilė sandaugų. Begeometrinės, svarbiausios iš jų yra mums jau žinomos išorinė ir vidinė sandau-gos. Kai kada vietoje vidinės sandaugos naudojama sandaugų, kurios vadinamoskairine ir dešinine santraukomis, pora. Su jomis netrukus šiame skyriuje ir susi-pažinsime. Be paminėtų operacijų, atskirai išskiriamos dar trys —- skaliarinė ir„storo taško“ (angl. fat dot) sandaugos bei algebros elementų komutatorius. Jųšioje knygoje iki šiol nenaudojome. Apibendrinimą pradėkime nuo svarbios irgerai žinomos išorinės sandaugos.
12.3.1. Apibendrinta išorinė sandauga. Prisiminkime, kad dviejų vekto-rių a1 ir a2 išorinę sandaugą buvome apibrėžę kaip antisimetrizuotą dviejų vek-torių geometrinę sandaugą,
a1 ∧ a2 =1
2!(a1a2 − a2a1). (12.19)
Panašiai galima antisimetrizuoti trijų vektorių geometrinę sandaugą,
a1 ∧ a2 ∧ a3 =1
3!(a1a2a3 + a3a1a2 + a2a3a1 − a1a3a2 − a3a2a1 − a2a1a3).
(12.20)Antisimetrizavimo procedūrą lengva apibendrinti ir kai turime daugiau vektorių.Taigi, p vektorių išorine sandauga vadinsime antisimetrizuotą vektorių geomet-rinių sandaugų sumą,
Ap = a1 ∧ a2 ∧ · · · ∧ ap=
1
p!
∑sgn(k1, k2, . . . , kp)ak1ak2 · · ·akp ,
p MENTĖ (12.21)

Clp,q algebros 309
kur p rango mentę pažymėjome simboliuAp. Dešinėje pusėje pasirodo visi gali-mi vektorių aki perstatymai. Simbolis sgn reiškia skliaustuose surašytų indeksųperstatymo ženklą. Jei sumos naryje įprastą standartinę didėjančių indeksų tvarkągauname perstatę indeksus lyginį skaičių kartų, narys rašomas su pliuso ženklu,priešingu atveju — su minuso. Taip sukonstruota išorinė sandauga, kaip žinome,yra nes kas kita, o mentė.
Jei išoriškai dauginame ne vektorius, o r ir s rangų mentes Ar ir Bs, antisi-metrizacijos rezultatas yra r + s ≤ n mentė:
Ar ∧Bs =〈ArBs〉r+s, jei r + s ≤ n,
0, jei r + s > n .(12.22)
Iš čia aišku, kad išorinė sandauga automatiškai pavirsta nuliu, jei abiejuose dau-gikliuose pasitaiko bent vienas toks pats vektorius. Akivaizdu, kad dviejų mul-tivektorių išorinę sandaugą visada galima užrašyti kaip atskirų rangų sandaugųsumą
A ∧ B =∑
r
〈A〉r ∧ B =∑
s
A ∧ 〈B〉s =∑
r,s
〈A〉r ∧ 〈B〉s. (12.23)
12.3.2. Multivektorių geometrinė sandauga. Norėdami apibendrinti geo-metrinę sandaugą multivektoriams elgsimės lygiai taip, kaip ir konstruodami an-tisimetrinę sandaugą, — sandaugose perstatinėsime gretimus vektorius. Pro-cedūrą įsivaizduoti bus paprasčiau, jei paimsime fiksuotų rangų r ir s homo-geninius multivektorius 〈A〉r ir 〈B〉s arba, dar geriau, mentes Ar ir Bs. Pa-vyzdžiui, paimkime Cl3,1 algebrą ir geometrine sandauga sudauginkime mentesA2 = (e1+2e3)∧(3e2) irB2 = e3∧(e2+e4), kurios čia užrašytos ortonormuo-toje bazėje e21 = e22 = e23 = 1 ir e24 = −1. Mentes sudauginkime geometrinesandauga ir, pasinaudoję sandaugos distributyvumo savybe, atskliauskime visusskliaustus. Po to kiekvieną narį pertvarkykime taip, kad visi baziniai vektoriai,kaip esame sutarę, būtų išrikiuoti standartine didėjimo tvarka. Stengiantis iš-rikiuoti bazinius vektorius eilės tvarka kiekvienas bazinių vektorių perstatymasatneša daugiklį −1, išskyrus tuos atvejus, kai greta atsiduria du tokie patys ba-ziniai vektoriai. Taip atsitikus, priklausomai nuo jų tipo sandauga pavirsta arba+1, arba −1, kitaip tariant, rangas sumažėja dvejetu. Apskaičiavę gauname
A2B2 =Ä(e1+2e3)∧(3e2)
äÄe3∧(e2+e4)
ä= −6−3(e13+2e24)+3e1234 .
(12.24)Taigi, matome, kad bazinių vektorių rikiavimo metu nario rangas, žiūrint kokiebaziniai vektoriai jį sudaro, gali nepakisti (kai abu daugikliai sudaryti iš skirtingųvektorių), sumažėti dviem (kai jie turi vieną bendrą bazinį vektorių), keturiais

310 12 skyrius
(kai yra du bendri baziniai vektoriai) ir t. t. Daugiausia rangas sumažėja tada,kai sutampa visi abiejų dauginamų narių vektoriai. Tokio nario rangas yra lygus|r − s|. Mūsų konkrečiu atveju (12.24) šis narys yra skaliaras, |2 − 2| = 0.Kadangi geometrinės sandaugos rezultatas, kaip žinome, negali priklausyti nuokonkrečios pasirinktos bazės, tai akivaizdu, kad menčių Ar ir Bs geometrinęsandaugą apibendrina formulė
ArBs = 〈ArBs〉|r−s| + 〈ArBs〉|r−s|+2 + · · ·+ 〈ArBs〉r+s
=m∑
k=0
〈ArBs〉|r−s|+2k ,(12.25)
kurm = 12 (r+s−|r−s|). Šios formulės griežtas ir sąlyginai paprastas įrodymas
remiantis geometrinės algebros aksiomomis yra pateiktas, pavyzdžiui, [65] ap-žvalgoje.
Kaip žinome, multivektorių A ir B sandaugą visada galima užrašyti kaip ho-mogeniniųmultivektorių sandaugų sumą. Savo ruožtu homogeniniusmultivekto-rius išreiškus menčių sumomis, multivektorių sandauga virsta menčių sandaugųsuma AB =
∑r,sArBs. Todėl menčių sandaugos formulė automatiškai leidžia
apskaičiuoti ir bet kokių multivektorių geometrinę sandaugą.Nesunku pastebėti, kad paskutinis (12.25) formulės narys yra ne kas kita,
kaip anksčiau aptarta išorinė bet kokio rango menčių sandauga,
Ar ∧Bs = 〈ArBs〉r+s , (12.26)
kurios rezultatas visada yra kita (ir vienintelė) mentė arba nulinis multivektorius.Tai esmingai skiriasi nuo dviejų menčių geometrinės sandaugos (12.25), kuri netnėra homogeninis multivektorius.
12.3.3. Apibendrinta vidinė sandauga. Sumoje (12.25) be išorinės san-daugos (12.26) nario, kuris yra didžiausio rango geometrinės sandaugos narys,yra ir mažiausio rango |r − s| narys
Ar · Bs = 〈ArBs〉|r−s| , (12.27)
kuris, kaip nesunku atspėti, yra vidinės multivektorių sandaugos atitikmuo ir,tuo pačiu, jos apibrėžimas. Paprasčiausioje dviejų menčių Ar ir Bs geometri-nėje sandaugoje, kaip rodo (12.25) formulė, rangas gali mažėti iki r − s arba ikis − r, priklausomai nuo to, kurios iš menčių rangas yra didesnis. Primename,kad geometrinėje algebroje neigiamo rango narių nėra. Tačiau čia atskirai deraaptarti vieną atskirą atvejį, būtent, multivektoriaus daugybą iš skaliaro. Kadangiskaliaras yra nulinio rango multivektorius, iš jo dauginant rangas nei padidėja,nei sumažėja, todėl tokios sandaugos negalima atskirti nuo išorinės sandaugos.

Clp,q algebros 311
Kad neatsirastų šio dviprasmiškumo (yra ir kitų priežasčių), turime nuspręsti,kuo laikyti geometrinės daugybos iš skaliaro narį, — išorine ar vidine sandau-ga. Pasirodo, kad daug patogiau ir nuosekliau [25] tokią sandaugą interpretuotikaip išorinę, o ne vidinę sandaugą. Todėl menčių vidinės sandaugos apibrėžimepadarysime išimtį, būtent,
Ar ·Bs =〈ArBs〉|r−s|, jei r, s > 0,
0, jei r = 0 arba s = 0,(12.28)
t. y. laikysime, kad skaliaro ir bet kokio multivektoriaus vidinė sandauga visadalygi nuliui. Poskyryje 12.4.3 netrukus pamatysime, kad šios praktiniuose skai-čiavimuose labai nepatogios išimties galima išvengti apibrėžus dvi kitas, labai įvidinę sandaugą panašias operacijas, — kairinę ir dešininę santraukas.
12.9 pavyzdys. 9 skyriujeplačiai taikėme Cl1,3 algebros bivektorių savybes σi ·σj =δij ir Iσi · Iσj = −δij . Parodysime, kad jos išplaukia iš (12.28) formulės. Kadangiσi = γiγ0, kur i = 1, 2, 3 yra bivektorius, turime
σi · σj = 〈σiσj〉2−2 = 〈γiγ0γjγ0〉 = −〈γiγjγ0γ0〉 = −〈γiγj〉 , (12.29)
todėl σi · σj = 0, jei i 6= j. Kai i = j 6= 0, tada σi · σi = −〈γiγi〉 = −1〈−1〉 = +1.Panašiai apskaičiuojam antrąją sandaugą
Iσi · Iσj = 〈IσiIσj〉2−2 = 〈I2σiσj〉 = −〈σiσj〉, (12.30)
iš kurios išplaukia, kad Iσi · Iσj = −δij .
Bet kokio rango multivektorių vidinė sandauga skaičiuojama pagal formulę
A · B =∑
r 6=0,s6=0
¨〈A〉r〈B〉s
∂|s−r| , (12.31)
kurioje, atkreipkitedėmesį, skirtingainegu skaičiuojant išorinę sandaugą (12.23),dėl ką tik aptartų išimčių negalima sumuoti pagal nulinius rangus.
12.3.4. Pagrindinių sandaugų savybės. Dabar trumpai aptarkime trijų api-bendrintų sandaugų savybes. Kadangi geometrinei sandaugai galima taikyti dist-ributyvumo sumos atžvilgiu taisyklę
Ar(Bs +Ct) = ArBs +ArCt , (12.32)
tai iš (12.25) formulės išplaukia, kad šia savybe pasižymi tiek vidinė, tiek ir iš-orinė sandaugos. Todėl dviejų bet kokių multivektorių vidinę sandaugą apskai-čiuojame juos išskaidę į rangus ir pasinaudoję distributyvumu:
A · B =∑
r
〈A〉r · B =∑
s
A · 〈B〉s =∑
r,s
〈A〉r · 〈B〉s . (12.33)

312 12 skyrius
Iš (12.25) formulės taip pat akivaizdu, kad asociatyvumo savybe (žr. (2.5) ak-siomas) pasižymi tik geometrinė ir išorinė sandaugos. Vidinė sandauga nėra aso-ciatyvi, t. y. (Ar ·Bs)·Ct 6= Ar ·(Bs·Ct). Tuo nesunku įsitikintivien apskaičiavus
abiejų menčių rangus, kurie yra atitinkamai∣∣∣|r− s| − t
∣∣∣ ir∣∣∣r − |s− t|
∣∣∣. Pavyz-džiui, paėmę r = 5, s = 3 ir t = 1, gauname 1 6= 3. Išorinės sandaugos rangai,
akivaizdu, sutampa∣∣∣|r + s|+ t
∣∣∣ =∣∣∣r + |s + t|
∣∣∣ = |r + s + t|.Jei išorinėje sandaugoje mentes sukeisime vietomis, rezultatas skirsis tik
ženklu:Ar ∧ Bs = (−1)rsBs ∧Ar . (12.34)
Tai lengva suprasti, jei įsivaizduosime, kad mentė yra tarpusavyje statmenų vek-torių išorinė sandauga. Vieną tokį vektorių perkėlus per kitą pasikeičia ženklas,o sukeitus mentes tokių ženklo pasikeitimų yra lygiai rs.
Vidinėje sandaugoje mentes sukeisti vietomis taip pat galima [66]. Iš tiesų,
paėmę, pavyzdžiui, r ≥ s ir prisiminę, kad 〈A〉r = (−1)r(r−1)
2 〈A〉r (nes pertvar-kant reikia atlikti 1
2r(r− 1) gretimų indeksų sukeitimų), bei atidžiai skaičiuoda-mi, kiek kartų indeksus sukeičiame vietomis (žr. 12.1 lentelę), galime rašyti:
Ar · Bs = 〈ArBs〉|r−s| =(−1)(r−s)(r−s−1)
2 〈flArBs〉|r−s|=(−1)
(r−s)(r−s−1)2 〈BsAr〉|r−s|
=(−1)(r−s)(r−s−1)
2 (−1)s(s−1)
2 (−1)r(r−1)
2 〈BsAr〉|r−s|=(−1)(r
2−r+s2−rs)〈BsAr〉|r−s| = (−1)s(s−r)Bs · Ar=(−1)s(r+1)Bs · Ar, kai r ≥ s .
(12.35)
Priešpaskutiniame pertvarkymo žingsnyje pasinaudojome tuo, kad daugindamidu gretimus skaičius r(r − 1) = r2 − r visada gauname lyginį skaičių, kurisženklo nepakeičia, t. y. (−1)r
2−r = 1. Tą pačią savybę pritaikėme ir paskutinia-me žingsnyje, kuriame s(s − r) pakeitėme į −s(s − r) ir pridėję lyginį skaičiųs(s + 1) rodiklį supaprastinome −s(s − r) + s(s + 1) = s(r + 1). Kaip mato-me, ženklai (12.34) ir (12.35) formulėje skiriasi daugikliu (−1)s, todėl r rangomentę perkėlus per nelyginio rango mentę, pavyzdžiui, vektorių s = 1, išorinėsir vidinės sandaugos įgyja priešingus ženklus.
Atskiras menčių daugybos atvejis yra daugyba iš vektoriaus:
Ak ∧ a = 〈Aka〉k+1 , a ∧ Ak = 〈aAk〉k+1 (12.36a)
Ak · a = 〈Aka〉k−1 , a · Ak = 〈aAk〉k−1 . (12.36b)

Clp,q algebros 313
Taisyklė Aprašymas
Ar · Bs = 〈ArBs〉|r−s|Ar ∧ Bs = 〈ArBs〉r+s
Ar =(−1)r(r−1)/2ArIAr =(−1)r(n−1)ArI⋆Ar =ArI
−1 = A′n−r
(Ar ∧Bs)I =Ar · (BsI)〈Ar · · ·Bs〉 = 〈BsAr · · · 〉
Vidinė menčių sandaugaIšorinė menčių sandaugaApgrąžaKomutavimas su pseudoskaliaruDuali mentėr ≤ sCiklinis perstatymas skaliarinėje dalyje
12.2 lentelė. Svarbiausios taisyklės mentėms. Ar ir Bs menčių rangai r ir stenkina sąlygą r, s ≤ n, kur n žymi vektorinės erdvės dimensiją
Iš (12.36) matome, kad išorinė daugyba iš vektoriaus yra ne kas kita, kaip vieneturangą didinantis, o vidinė daugyba iš vektoriaus — rangą žeminantis opratorius.
Svarbiausias pagrindinių daugybos operacijų taisykles mentėms apibendri-nome 12.2 lentelėje. Jos priešpaskutinėje eilutėje esanti formulė vidinę sandaugąleidžia pakeisti išorine, arba atvirkščiai. Vektoriaus ir bivektoriaus atveju ji virstadažnai mūsų taikyta taisykle a ∧ BI = a · (BI).
12.10 pavyzdys. Paimkim du Cl1,3 algebros bivektorius A2 = γ10 ir B2 = γ23.Pagal (12.25) formulę jų geometrinė sandauga yra neigiamo ženklo pseudoskaliaras, t. y.A2B2 = γ10γ23 = −I4. Todėl pasinaudoję 12.2 lentele galime rašyti γ10 ∧ γ23 =〈A2B2〉4 = −I4. Kita vertus, paėmę A2 = γ23 ir B2 = γ23 turime A2B2 = γ23γ23 =−1. Todėl γ23 · γ23 = 〈A2B2〉0 = −1.
12.3.5. Grammo-Schmidto ortogonalizacija. Skaičiuoti dažnai patogiau-sia ortonormuotoje vektorių bazėje. Jei mentę sudarantys vektoriai nėra tarpu-savyje ortogonalūs, juos galima tokiais padaryti pritaikius Grammo-Schmidtoortogonalizacijos procedūrą. Jos esmė paprasta. Pasirinkę kokį nors vektoriųa′1 = a1, kitą vektorių a′2, o bendru atveju a′k+1, gaminame atimdami iš ak+1
visų prieš tai apskaičiuotų atvirkštinių (a′k)−1 ≡ a′−1
k ir šiuo metu „perdirbamo“vektoriaus ak+1 vidines sandaugas,
a′k+1 = ak+1 −k∑
j=1
Äa′−1j · ak+1
äa′j . (12.37)
Atvirkštinis vektorius, kaip žinome dar iš 1 skyriaus, yra visada lygiagretus pra-diniam, tik jo ilgis pakeistas taip, kad abu vektorius sudauginę gautume vienetą.Kitaip tariant, sandauga
Äa′−1j · ak+1
äa′j nepakeičia ak+1 normos. Pavyzdžiui,
a′2 apskaičiuotume pagal tokią formulę: a′2 = a2 − (a′−11 · a2)a′1. Akivaizdu,
kad aprašytu būdu atimdami sandus, lygiagrečius anksčiau apskaičiuotiems vek-

314 12 skyrius
toriams, galų gale sukonstruosime ortogonalių vektorių sistemą. Ortonormuotąbazę gausime šiuos vektorius sunormavę.
12.3.6. Garsiosios formulės. Pirmame skyriujematėme, kad suskaidędvie-jų vektorių geometrinę sandaugą į skaliarinę ir bivektorinę dalis, abi jas galėjomeprasmingai interpretuoti. Kita vertus, kaip ne kartą įsitikinome vėliau, toks su-skaidymas yra patogus pertvarkant bei prastinant formules. Paminėtą išskaidymągalime apibendrinti ir vektoriaus sandaugai iš bet kokio homogeninio multivek-toriaus. Išveskime šią labai svarbią formulę. Tuo tikslu pirmiausia panagrinėki-me vektoriaus a ir bet kokio versoriaus pavidalu užrašyto (todėl nehomogeninio)multivektoriaus A = a1a2 · · ·ar geometrinę sandaugą. Prisiminę, kad dviejųvektorių vidinė sandauga apibrėžiama per geometrinę sandaugą,
ab = 2a · b− ba , (12.38)
pritaikykime formulę sukeisdami vektorius a ir ai sandaugojeaA = aa1a2 · · ·artiek kartų, kad vektorius a atsidurtų gale. Tai atlikę randame
aA = (aa1)a2 · · ·ar= (2a · a1)a2 · · ·ar − (a1a)a2 · · ·ar = (2a · a1)a2 · · ·ar − a1(aa2) · · ·ar= (2a · a1)a2 · · ·ar − (2a · a2)a1a3 · · ·ar + a1(a2a)a3 · · ·ar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
= 2r∑
k=1
(−1)k+1a · aka1a2 · · · ak · · ·ar + (−1)ra1a2 · · ·ara , (12.39)
kur paukščiuku pažymėjome vektorius ak, kuriuos sandaugoje reikia praleisti.Primename, kad užrašytose išraiškose pirmiausia apskaičiuojame vidinę, o jaupo to geometrinę sandaugą. Dabar bendro pavidalo versoriuje A = a1a2 · · ·arvektorius ai pakeiskim antikomutuojančiais ortonormuotais baziniais vektoriaisA → Ar = e1e2 · · ·er. Tai reiškia, kad vietoje nehomogeninio multivektoriausAr toliau nagrinėsime r rango mentę Ar. Perkėlę (12.39) formulėje paskutinįnarį į kitą pusę ir padalinę pusiau gauname
1
2
Äae1e2 · · ·er − (−1)re1e2 · · ·era
ä=
r∑
k=1
(−1)k+1a · eke1e2 · · · ek · · ·er.
(12.40)Kairę formulės pusę galim perrašyti pavidalu 1
2 (aAr − (−1)−rAra). Tuo tarpudešinėje lygties pusėje pasistengus galima pamatyti vektoriaus a ir mentės Arvidinę sandaugą a·Ar, nes ją sudaro visi įmanomi vienetu mažesnio rango (r−1)

Clp,q algebros 315
nariai. Todėl (12.40) formulę galima užrašyti glaustai:
1
2
(aAr − (−1)rAra
)= a · Ar . (12.41)
Kai Ar yra vektorius, A1 = b, arba bivektorius,A2 = B, išraiška (12.41) virstaanksčiau gautomis formulėmis a · b = (ab+ ba)/2 ir a · B = (aB − Ba)/2.
Jei vietoje vidinės sandaugos (12.38) paimtume išorinės vektorių sandaugosapibrėžimą
ab = 2a∧ b+ ba (12.42)
ir atliktume tuos pačius veiksmus, išvestume labai panašią formulę
1
2
(aAr + (−1)rAra
)= a ∧ Ar . (12.43)
Griežtesnius išvedimus ir bendresnes formules skaitytojas ras knygoje [13].Iš (12.41) ir (12.43) formulių išplaukia labai svarbi vektoriaus a ir r-tojo
rango mentės Ar arba tokio pat rango homogeninio multivektoriaus 〈A〉r geo-metrinės sandaugos išskaidymo formulė
aAr = 〈aAr〉r−1 + 〈aAr〉r+1 = a · Ar + a ∧Ar . (12.44)
Ji rodo, kad vektoriaus ir homogeninio multivektoriaus geometrinę sandaugą ga-lima užrašyti kaip multivektorių su vienetu mažesniu ir didesniu rangu sumą.Pirmasis narys atitinka vidinę 〈aAr〉r−1 ≡ a ·Ar, o antrasis — išorinę sandaugą〈aAr〉r+1 ≡ a∧Ar . Perrašykime šias labai svarbias ir plačiai taikomas formulesdar kartą,
a · Ar = 12
ÄaAr − (−1)rAra
ä, (12.45a)
a ∧ Ar = 12
ÄaAr + (−1)rAra
ä, (12.45b)
aAr = a ·Ar + a ∧Ar . (12.45c)
Jas dar derėtų papildyti formulėmis, kuriose vektorius yra padaugintas iš kitospusės:
Ar · a = 〈Ara〉r−1 =12
ÄAra− (−1)raAr
ä, (12.46a)
Ar ∧ a = 〈Ara〉r+1 =12
ÄAra+ (−1)raAr
ä, (12.46b)
Ara = Ar · a+Ar ∧ a . (12.46c)
Šios formulės yra teisingos bet kuriai algebrai, nepriklausomai nuo jos dimensi-jos ir signatūros. Žinoma, tai, kad multivektorių daugindami iš vektoriaus galimegauti tik vidines ir išorines sandaugas (kurių rangai skiriasi dvejetu), išplaukiair iš bendros geometrinės sandaugos formulės (12.25). Daugelį kitų svarbių irskaičiavimus palengvinančių formulių bei jų išvedimus skaitytojas ras knygo-se [8, 13, 47, 60, 67] ir internetiniame straipsnyje [66].

316 12 skyrius
12.4. Kitos geometrinėje algebroje naudojamos sandaugos
Knygoje iki šio poskyrio naudojome tik tris sandaugas: išorinę, geometrinęir vidinę. Pirmųjų dviejų sandaugų apibrėžimas yra visuotinai pripažintas. Tiesa,mokslinėje literatūroje antisimetrizuojant vektorius išorinės sandaugos apibrėži-me (12.21) galima sutikti kitokį normavimo daugiklį2. Tačiau toks pernormavi-mas tik pakeičia kai kurių formulių koeficientus, todėl yra susitarimo reikalas. Suvidine sandauga viskas kur kas painiau: vietoje jos galima sutikti dvi panašias,bet mažiau išimčių reikalaujančias operacijas, kurios vadinamos kairine ir dešini-ne santraukomis. Be to, mokslinėje literatūroje naudojama dar keletas operacijų,kurios irgi turi savo vardus. Jas visas čia ir aptarsime.
12.4.1. Multivektorių skaliarinė sandauga. Ši sandauga yra tiesiog atski-ru simboliu ∗ pažymėta skaliarinės dalies išskyrimo iš multivektorių sandaugosoperacija:
A ∗ B =∑
r,s
¨〈A〉r〈B〉s
∂0. SKALIARINĖ SANDAUGA (12.47)
Skaliarinėje sandaugoje argumentus galima cikliškai keisti vietomis, be to, jągalima apgręžti, nes nuo to skaliaras nepasikeičia:
A ∗ B = B ∗ A, A ∗ B = B ∗ A = A ∗ B . (12.48)
Jei vietoje bendrų multivektorių A ir B paimsime homogeninius multivektorius,skaliarinė sandauga nebus lygi nuliui tik tada, kai jų abiejų rangai lygūs. Tokiuatveju skaliaras 〈B〉r ∗ 〈A〉r gali būti interpretuojamas kaip metrikos plėtinys, osandauga 〈A〉r ∗ 〈A〉r — kaip homogeninio multivektoriaus normos kvadratas.
12.4.2. Komutatorius. Tai dar viena plačiai naudojama operacija, kuri li-teratūroje žymima tuo pačiu simboliu, kaip tradicinė vektorinė sandauga× ir yrapaprasčiausias multivektorių A ir B geometrinių sandaugų skirtumas:
A× B =1
2(AB− BA) . KOMUTATORIUS (12.49)
Komutatorius (12.49) patogus tuo, kad, panašiai kaip garsiosios vektoriaus irmentės formulės (12.45c) ir (12.46c), leidžia glaustai užrašyti bivektoriaus B irmentės Ar (kai r 6= 1) sandaugą [66]:
BAr = B ·Ar + B ∧ Ar + B ×Ar . (12.50)
2Išoriškai dauginant dvi r ir s laipsnio formas literatūroje naudojami skirtingi normavimokoeficientai, būtent r!s!, (r + s)!, arba (r+s)!
r!s!. Tai sąlygoja dažną klaidą dualios formos apibrėži-
me [68].

Clp,q algebros 317
Komutatoriaus (12.49) operacija ypač praverčia, kai abu daugikliai yra bivek-toriai. Jei pasinaudoję bendra multvektorių sandaugos formule (12.25) apskai-čiuotume dviejų bivektorių komutatorių B × A, pamatytume, kad jos rezultatastaip pat yra bivektorius B × A =
∑i Ci. Tai lengva suprasti, nes geometrinėse
sandaugose pasirodžiusių skaliarų skirtumas yra nulis. Išsiprastina ir pasirodan-tys keturvektoriai, nes vieną bivektorių keliant per kitą ženklas nepasikeičia. To-dėl skirtume gali pasirodyti tik antro rango nariai. Priminsime, kad, pavyzdžiui,sukimų grupės elementus galima nusakyti Lie algebros infinitezimaliaisiais (begalo mažų posūkių) operatoriais. Trimatėje Euklido erdvėje jų vaidmenį atlieka,pavyzdžiui, iš menamojo vieneto i =
√−1 padaugintos Paulio matricos. Tokių
operatorių komutatoriai visada išsireiškia per tos pačios grupės infinitizimaliųjųoperatorių tiesines kombinacijas, panašiai kaip formulėje Bi ×Aj =
∑k c
ki,jCk,
kur koeficientai cki,j vadinami Lie algebros struktūrinėmis konstantomis. Geo-metrinės algebros požiūriu infinitezimalieji operatoriai yra ne kas kita, kaip bi-vektoriai. Būtent todėl sukimo transformacijų operatorių eksponentėse, t. y. roto-rių eksponentėse, stovi ne bet kokio rango multivektoriai, o bivektoriai, kuriuostaip pat būtų galima vadinti infinitezimaliaisiais grupės operatoriais.
12.4.3. Kairinė ir dešininė santraukos. Šioje knygoje naudota vidinė san-dauga, kuri dar kartais vadinama Hestenes vidine sandauga, mokslininko, kurisją ėmė plačiai taikyti, vardu, yra tik vienas iš galimų pasirinkimų. Literatūroje,ypač skirtoje matematikams, sutinkamas kitoks vidinės sandaugos apibrėžimas,kai vietoje vienos vidinės · sandaugos įvedamos dvi operacijos, vadinamos kairi-ne ir dešinine santraukomis (angl. left and right contraction). Jos žymimos sim-boliais y ir x. Norėdami pamatyti šių operacijų panašumus ir skirtumus, šiameskyriuje formules užrašysime dviem skirtingais būdais, — naudodami įprastą vi-dinę sandaugą ir kairinę/dešininę santraukas. Plačiau apie santraukos operacijasrašoma knygoje [60] ir kompiuterinės bei matematinės pakraipos straipsniuose,pavyzdžiui, [65]. Pabrėšim, kad skirtingų vidinių sandaugų apibrėžimas nė kieknekeičia geometrinės algebros esmės, o yra tik formulių užrašymo patogumo irbendrumo klausimas.
Prisiminkim, kad mentės ir skaliaroλ vidinę sandaugą laikėme nuliu,Ar ·λ =λ ·Ar = 0, o skaliaro ir mentės išorinę sandaugą interpretavome kaip tos mentėsdaugybą iš skaičiaus,Ar ∧λ = λ∧Ar = λAr. Tačiau jei vietoje simetrinio dau-giklių rangų atžvilgiu apibrėžimo (12.28) įvestume žemiau užrašytas kairiosios yir dešiniosios x menčių santraukos operacijas
Ar y Bs =
〈ArBs〉s−r, jei s ≥ r,
0, jei s < r ,(12.51a)

318 12 skyrius
Ar x Bs =
〈ArBs〉r−s, jei r ≥ s,
0, jei r < s, ,(12.51b)
pamatytume, kad menčių daugybai iš skaliaro nebereikia daryti jokių išimčių. Iriš tiesų, formulėmis (12.51) apibrėžta sandauga nelygi nuliui tik tada, kai ran-gų skirtumas yra teigiamas. Kitaip tariant, nenulį gauname tik tuo atveju, kaisantraukos simbolio vertikali linija glaudžiasi prie daugiklio su didesniu rangu.Tuomet įprastinę vektoriaus daugybą iš skaliaro λ ·a keičia dvi skirtingos taisyk-lės, kuriose jau svarbu, kurioje vietoje skaliaras λ stovi vektoriaus a atžvilgiu —prie vertikalaus ar prie horizintalaus brūkšnelio
a · λ = 0 ⇒ a y λ = λ x a = 0,
aλ = λa ⇒ a x λ = λ y a.(12.52)
Dviejų a ir b vektorių, kurių rangai yra tokie patys, vidinė sandauga, žinoma,išlieka simetrinė
a · b = b · a ⇒ a y b = b x a, (12.53)
todėl vektoriaus santrauka su vektoriumi arba, bendriau, dviejų vienodo rangomultivektorių santrauka nepriklauso nuo to, kurią iš dviejų santraukų naudosi-me. Tai reiškia, kad svarbias (12.45c) ir (12.46c) formules nesunku perrašyti pertinkamai pasirinktą santraukos operaciją, būtent
aAr = a · Ar + a ∧ Ar ⇒ aAr = a y Ar + a ∧Ar,Ara = Ar · a+Ar ∧ a ⇒ Ara = Ar x a+ Ar ∧ a.
(12.54)
Vektoriaus a ir bivektoriausB vidinė sandauga duoda vektorių a · B = d. JeiB užrašysime kaip dviejų vektorių išorinę sandaugą, B = b ∧ c, turėsime
a · B = a · (b ∧ c) ⇒ a y (b ∧ c) = a y B, (12.55)
t. y. tokios vidinės sandaugos atitikmenį galima užrašyti naudojant kairinę san-trauką
a · B ⇒ a y B. (12.56)
Panašiai randame, kad
B · a ⇒ B x a = −a y B , (12.57)
nes vektoriaus ir bivektoriaus vidinė sandauga yra antisimetrinė. Matome, kadvisais atvejais vertikali linija liečiasi su aukštesnio rango mente.

Clp,q algebros 319
Formules (12.45a)–(12.46c) galima apibendrinti bet kokiam homogeniniammutivektoriui 〈A〉r,
a y 〈A〉r = 12
Äa〈A〉r − (−1)r〈A〉ra
ä, (12.58a)
〈A〉r x a = 12
Ä〈A〉ra− (−1)ra〈A〉r
ä
= (−1)r−1a y 〈A〉r .(12.58b)
Jos gali pasitarnauti kaip atspirties taškas išvedant kitas formules. Pavyzdžiui,iš jų lengva užrašyti, kam lygi geometrinė vektoriaus ir homogeninio mutivekto-riaus 〈A〉r sandauga,
a〈A〉r = a y 〈A〉r + a ∧ 〈A〉r , (12.59a)
〈A〉ra = 〈A〉r x a + 〈A〉r ∧ a . (12.59b)
Pasitelkus indukcijos metodą šių išraiškų, pavyzdžiui, jau pakanka multivektoriųgeometrinės sandaugos formulei (12.25) įrodyti. Bendru atveju menčių santrau-kos operacijas ir vidinę sandaugą sieja tokios taisyklės:
k < l; Ak yBl =Ak · Bl, Ak xBl = 0, (12.60a)
k = l; Ak yBl =Ak xBl = Ak · Bl, (12.60b)
k > l; Ak yBl =0, Ak xBl = Ak ·Bl . (12.60c)
Jas būtų galima pavadinti „aukštesnio rango taisyklėmis“, nes, kaip jau ne kar-tą pabrėžėme, nenulinį rezultatą gauname tik tada, kai vertikali linija glaudžiasiprie aukštesnio rango mentės. Iš (12.60) taisyklių išplaukia, kad apibendrintąbivektoriaus ir mentės (12.50) sandaugą dabar galime užrašyti formule
BAr = B yAr + B ∧ Ar + B ×Ar . (12.61)
Pastebėsime, kad šioje formulėje jau nereikia rašyti išimties sąlygos r 6= 1, nesformulė automatiškai galioja visiems rangams. Taigi, ją galima užrašyti ir neho-mogeninio rango multivektoriui
BA = B y A + B ∧ A+ B × A . (12.62)
Tai reiškia, kad santraukų operacijos leidžia užrašyti bendresnes formules, neguHestenes vidinė sandauga.
Kita vertus, kadangi tiek kairinė y, tiek ir dešininė x santrauka yra asimetri-nės, joms reikia nustatyti papildomas taisykles involiucijoms apskaičiuoti ir ki-toms operacijoms, kurias atliekant skirtingų rangų nariai sukeičiami vietomis.Pavyzdžiui, atliekant apgražą būtina sukeisti vietomis ne tik mentes, bet ir vieną
santrauką pakeisti kita, fla y B = B x a, arba bendriau ‚As yBr = Br x As, kais < r. To nepadarius reiškinys pavirstų nuliu. Kadangi sudėtingoje formulėje iš

320 12 skyrius
anksto nežinome, kurioje vidinės sandaugos taško pusėje stovi mažesnio rangomentė, tai naudojant santraukas visas formules tenka išsivesti iš naujo [60, 65].
Kairinė ir dešininė santraukos nėra nepriklausomos operacijos. Lengviau-sia tuo įsitikinti pažvelgus į menčių sukeitimo taisyklę (12.35) vidinėje (taško)sandaugoje. Prisiminę, kad vertikalus brūkšnelis glaudžiasi prie didesnio rangomentės ir perrašę (12.35) formulę santraukoms, turime
Ar xBs = (−1)(r+1)sBs y Ar, kai r ≥ s . (12.63)
Sąlygos r ≥ s galima ir nerašyti, nes ji tik parodo, kada rezultatas nebus nulis.Todėl matematikai dažnai išsiverčia naudodami tik vieną iš santraukų — kairinęarba dešininę. (12.63) formulė apibendrina anksčiau išnagrinėtus dalinius atve-jus.
Dviejų multivektorių vidinės sandaugos (12.35) skleidinį dabar keičia for-mulės
A y B =∑
kl
〈AkBl〉l−k, l ≥ k,
A x B =∑
kl
〈AkBl〉k−l, k ≥ l,(12.64)
kuriose sąlygas l ≥ k ir k ≥ l vėl užrašėme tik todėl, kad aiškiau matytume, kadarezultatas nėra nulis. Jas galima praleisti, nes pačių santraukų apibrėžimai auto-matiškai užtikrina, kad nereikalingų narių neatsiras. Tuo tarpu (12.35) formulėjetai pasiekiama tik išreikštai kontroliuojant, kad nepasirodytųAs ·λ pavidalo, kurλ yra skaliaras, nariai. Tai ne taip svarbu skaičiuojant popieriuje, tačiau gali labaikomplikuoti kompiuterinę programą [65].
12.4.4. Riebaus taško arba Dorsto vidinė sandauga. Jei apibrėžtume darvieną sandaugos operaciją [60], kuri pasižymėtų tiksliai tomis pačiomis savybė-mis, kaip ir įprasta vidinė sandauga (12.31), tik neturėtų daugybos iš skaliaroišimčių,
A • B =∑
r,s
¨〈A〉r〈B〉s
∂|s−r| , (12.65)
galėtume užrašyti dar vieną gražią formulę, susiejančią skaliarinę ir Dorsto vidi-nes sandaugas bei abi santraukas,
A y B+ A x B = A ∗ B+ A • B . (12.66)
Ši formulė rodo, kad kairinė ir dešininė santraukos bei skaliarinė ir vidinės san-daugos yra tiesiog skirtingi būdai tai pačiai informacijai (savybei) nusakyti.

Clp,q algebros 321
12.5. Cliffordo algebrų klasifikacija
2 skyriuje nustatėme, kad Cl0,1 algebra yra ne kas kita, kaip kompleksiniųskaičių C algebra. Kitos dvi algebros, Cl2,0 ir Cl1,1, yra izomorfiškos dvimačių2×2 realiųjų matricų algebrai R(2). Tuo tarpu Cl0,2 pasirodė esanti kvaternionųalgebra H. Šiame poskyryje šią seką pratęsime ir išsiaiškinsime, kokias matri-cas atitinka bet kokia Cliffordo algebra Clp,q. Pamatysime, kad tokį atitikimąvisada galima surasti, ir jis pasižymi įdomia periodiškumo savybe, kurią nusakoCliffordo algebrų 8× 8 periodiškumo lentelė.
12.5.1. Cliffordoalgebrų izomorfizmai. Pradžioje prisiminkimeerdvių tie-sioginės sumos ⊕ ir sandaugos ⊗ operacijas.
Dviejų tiesinių erdvių U ir V tiesiogine suma vadinama tiesinė erdvė W =U ⊕ V , pasižyminti tokiomis savybėmis: 1) U ∩ V = 0, t. y. pirminės erdvėsnesikerta ir 2) erdvių dimensijos tenkina sąlygą dimW = dimU + dimV . Jeibaziniai erdvių vektoriai yra ei ∈ U ir fi ∈ V , tada tiesioginės erdvių sumosbazinius vektorius galime užrašyti kaip ei ⊕ fj ∈ W . Jei bazinius vektoriusvaizduojame matricomis, tada W = diagU, V . Pavyzdžiui, paėmę 1 × 1 ir2× 2 elementų matricinius atvaizdus,
e1 = a11, f2 =
ñb11 b12b21 b22
ô, (12.67)
jų tiesioginę sumą galime užrašyti taip:
e1 ⊕ f2 =
a11 0 00 b11 b120 b21 b22
. (12.68)
Dviejų tiesinių erdvių U ir V tiesioginė sandauga taip pat yra tiesinė erdvėW = U ⊗ V . Jei atskirų erdvių baziniai vektoriai yra ei ∈ U (i = 1, . . . , n) irfj ∈ V (j = 1, . . . , m), tada W erdvės elementus sudaro visos galimos sandau-gos wij = ei ⊗ fj ∈ W , kurių yra dimU dimV = nm. Jei baziniai vektoriaivaizduojami matricomis, pavyzdžiui,2×2 matrica A ∈ U ir 3×3matrica B ∈ V ,tada tiesioginė matricų sandauga C ∈W yra
C = A⊗ B =
ña11B a12B
a21B a22B
ô. (12.69)
Koeficientusaij padauginę iš matricos B, gausime 6×6matricą. Jei paimsime duW = U⊗V erdvės elementus, pavyzdžiui, ei⊗fj ir ek⊗fl, tada jų geometrinėsandauga yra suprantama kaip (ei ⊗ fj)(ek ⊗ fl) = (eiek)⊗ (fjfl).

322 12 skyrius
Kad būtų aiškiau, pirmiausia paprastu pavyzdžiu išsiaiškinkime, kaip supras-ti dviejų Cliffordo algebrų tiesioginę sandaugą. Paimkime dviejų algebrų ele-mentų bazes Cl0,1 = 1, e1 ir Cl2,0 = 1, f1, f2, f12. Šių algebrų tiesioginėsandauga pagamina visas galimas elementų sandaugų poras
Cl0,1 ⊗ Cl2,0 =
1⊗ 1, 1⊗ f1, 1⊗ f2,−1⊗ f21, e1 ⊗ 1, e1 ⊗ f1, e1 ⊗ f2, e1 ⊗ f12.(12.70)
Įsitikinkime, kad gauta aibė sutampa su Cl3,0 algebros elementais, išdėstytaistokia tvarka: 1,σ1,σ3,−Iσ2, I, Iσ1, Iσ3,σ2. Tam būtina įsitikinti, kad už-rašytų elementų daugybos lentelė sutampa su Cl3,0 algebros daugybos lente-le. Patikrinsime tik keletą elementų, o likusį darbą paliksime skaitytojui. Bi-vektorius σ3σ1 yra (1 ⊗ f2)(1 ⊗ f1) = 1 ⊗ f21. Gautas narys sutampa suIσ2 = 1⊗ f21. Tiesioginės sandaugos pseudoskaliaras yra σ1σ2σ3 = I . Iš tik-rųjų, σ1σ2σ3 = (1⊗f1)(e1⊗f12)(1⊗f2) = (e1⊗f2)(1⊗f2) = e1⊗1 = I .Taigi, galim rašyti, kad Cl3,0 = Cl0,1 ⊗ Cl2,0.
Norėdami išvesti realių Cliffordo algebrų periodiškumo savybę, aukštesnėsdimensijos Cliffordo algebrą stengsimės užrašyti kaip mažesnės dimensijos Clif-fordo algebrų tiesioginę sandaugą. Laikantis tokios strategijos labai svarbų vaid-menį vaidina algebrų izomorfizmai. Priminsime, kad dvi algebrosA irB vadina-mos izomorfiškomis (žymima A ∼= B), jei jų elementų daugybos lentelės (atitin-kamai peržymėjus elementus) visiškai sutampa. Pavyzdžiui, 4 skyriuje buvome
parodę, kad kvaternionų algebra yra izomorfiška Cl(+)3,0 algebrai, H ∼=Cl
(+)3,0 .
Analizuodami realias Cliffordo algebras matematikai nustatė [69] tokius mū-sų tikslui svarbius izomorfizmus:
Clp,q ⊗ Cl2,0 ∼=Clq+2,p, (12.71a)
Clp,q ⊗ Cl1,1 ∼=Clp+1,q+1, (12.71b)
Clp,q ⊗ Cl0,2 ∼=Clq,p+2. (12.71c)
Juos nesunku patikrinti pastebėjus, kad, pavyzdžiui, Clq+2,p bazinius vektorius,kurių yra p+q+2, nesunkupasigaminti iš p+q baziniųClp,q vektorių e1, . . . , ep,ep+1, . . . , ep+q ir dviejų Cl2,0 algebros bazinių vektorių f1, f2, iš visų ele-mentų tiesioginių sandaugų išrinkus tokias:
e1⊗f12, . . . , ep⊗f12, ep+1⊗f12, . . . , ep+q⊗f12, 1⊗f1, 1⊗f2 , (12.72)
kur f12 = f1f2. Ir iš tiesų, tikrindami bendros Cliffordo algebros Clp,q baziniųvektorių sąryšius
eiej + ejei = 2ηij, kur ηi,i =
+1 jei 1 ≤ i ≤ p,
−1 jei p < i ≤ p+ q,(12.73)

Clp,q algebros 323
ir ηi,j = 0, jei i 6= j, naujai apibrėžtoje bazėje (12.72), pavyzdžiui, sandaugosvektoriui ei = ej = ep⊗f12, kurio pirmajam daugikliuiClp,q algebroje turėjomee2p = +1, dabar gauname priešingą ženklą:
(ep ⊗ f12)(ep ⊗ f12) + (ep ⊗ f12)(ep ⊗ f12) = 2(e2p ⊗ f212)
= 2(1⊗ (−1)) = −2.(12.74)
Kitaip tariant, ei⊗f12 tipo vektoriai, kurių yra p+ q, susikeičia signatūromis: pvektoriai tampa q vektoriais, ir atvirkščiai. Likusiųdviejų bazinių vektorių 1⊗f1ir 1⊗f2, signatūra, akivaizdu, sutampa su pradinės algebros Cl2,0 vektorių signa-tūra. Tai reiškia, kad naujai sukonstruotabazė (12.72) priklauso Clq+2,p algebrai.Įrodymas baigiamas įsitikinant, kad visi naujos bazės vektoriai yra tiesiškai ne-priklausomi.
Panašiai patikrinami ir likę du izomorfizmai. Matome, kad dėl bivektoriausf212 = −1 savybės Clp,q ⊗ Cl0,2 atveju dešinėje pusėje p ir q vektorių vaidmuo
vėl susikeičia, tačiau paėmę Clp,q ⊗ Cl1,1 matome, kad f212 = +1, todėl p ir q
vietomis nesusikeičia.Algebrų izomorfizmai (12.71a) ir (12.71c) mums leidžia palaipsniui mažinti
euklidinių Cln,0 ir antieuklinidniųCl0,n algebrų dimensijas pakeičiant jas mažes-nės dimensijos algebrų tiesioginėmis sandaugomis. Tuo tarpu pritaikius (12.71b)izomorfizmus bet kurią neuklidinę algebrą galima paversti euklidinės arba anti-euklidinės algebros ir Cl1,1 algebrų tiesiogine sandauga. Pavyzdžiui, jei p > q,tai q kartų pasinaudoję šia formule gauname, kad
Clp,q ∼= Clp−q,0 ⊗ Cl1,1 ⊗ · · · ⊗ Cl1,1︸ ︷︷ ︸q kartų
. (12.75)
12.11 pavyzdys. Užrašykime Cl0,7 algebrą mažesnių dimensijų algebrų tiesioginėmissandaugomis. Pasinaudoję (12.71) formulėmis turime
Cl0,7 ∼= Cl5,0⊗Cl0,2 ∼= Cl0,3⊗Cl2,0⊗Cl0,2 ∼= Cl1,0⊗Cl0,2⊗Cl2,0⊗Cl0,2 . (12.76)
Todėl Cl0,7 algebra yra izomorfiška Cl1,0,Cl2,0 ir dviejų Cl0,2 algebrų kopijų tiesiogineisandaugai (nes Cl0,3 ⊗ Cl2,0 ∼= Cl5,0 ir Cl1,0 ⊗ Cl0,2 ∼= Cl0,3).
Taigi, bet kokią Cliffordo algebrą visada galime užrašyti kaip vienmačių irdvimačių algebrų tiesioginę sandaugą.
Kaip buvo parodyta 2 skyriuje, Cliffordo algebros elementus galima atvaiz-duoti matricomis, kurių atitinkamas rinkinys yra izomorfiškas Cliffordo algeb-rai. Ten parodėme, kad Cl0,1 algebra yra kompleksinių skaičių C algebra, t. y.Cl0,1
∼= C, algebros Cl2,0 ir Cl1,1 yra izomorfiškos dvimačių 2× 2 realiųjų mat-ricų algebrai R(2), t. y. Cl2,0
∼= R(2) ir Cl1,1 ∼= R(2), o Cl0,2 algebra yra

324 12 skyrius
kvaternionų algebra, Cl0,2 ∼= H. Kita vertus, 4 skyriuje parodėme, kad Cl3,0 yraizomorfiška dvimačių kompleksinių matricų algebrai C(2). Prie šių atitikmenųdar galime pridėti du akivaizdžius atvejus: Cl0,0 ∼= R ir Cl1,0 ∼= R⊕ R. Žinantpaprastų algebrų matricinius atvaizdus nesunku juos gauti ir sudėtingesnėmsgeo-metrinėms algebroms. Užrašysime keleto fizikams svarbesnių Cliffordo algebrųišskaidymus tiesioginėmis sandaugomis:
Cl3,0∼= Cl0,1 ⊗Cl2,0
∼= C⊗R(2) ∼= C(2),
Cl1,3∼= Cl0,2 ⊗Cl1,1
∼= H ⊗R(2) ∼= H(2),
Cl3,1∼= Cl2,0 ⊗Cl1,1
∼= R(2)⊗ R(2) ∼= R(4),
Cl4,1∼= Cl0,1 ⊗Cl2,0 ⊗Cl1,1 = C⊗R(2)⊗ R(2) ∼= C⊗R(4) ∼= C(4).
(12.77)
12.5.2. Realiųjų Cliffordo algebrų periodiškumas. 1907 metais J. Wed-derburnas (1882–1948) įrodė svarbų matematinį teiginį, dabar žinomą Wedder-burno ir Artino teoremos vardu. Ji tvirtina, kad kiekvieną baigtinę asociatyviąir paprastą algebrą3 atitinka tam tikros (vienareikšmiškai nustatomos) dimensijosrealiųjų R, kompleksiniųC arba kvaternionų H matricų algebra.
Paprastų Cliffordo algebrų atitikmenis jau užrašėme (12.77) formulėje. Ta-čiau kokios gi matricos atitinka aukštesnių dimensijų Cliffordo algebras? Norė-dami tai nustatyti pasinaudokime gerai žinomais matricų algebrų Mm(F) izo-morfizmais [69], kur m žymi matricos dimensiją, o F — vieną iš skaičių laukų,R, C arba H,
(1) Mm(R)⊗Mn(R) ∼= Mmn(R), (5) C⊗C ∼= C⊕ C,
(2) Mm(R)⊗R ∼= Mm(R), (6) C⊗H ∼= M2(C), (12.78)
(3) Mm(R)⊗C ∼= Mm(C), (7) H⊗ H ∼= M4(R).
(4) Mm(R)⊗H ∼= Mm(H),
Iš jų neakivaizdūs tik (6) ir (7) izomorfizmai — tie, į kuriuos įeina kvaternionai.Tačiau 3 skyriuje matėme (žr. (3.91) formulę), kad kvaternionus galima atvaiz-duoti 2×2 kompleksinėmis matricomis. Tai atitinka (6) izomorfizmą. Tuo tarputen pat (3.90) formulėje pateiktas kvaternionų algebros realizavimas 4 × 4 rea-liomis matricomis pagrindžia (7) sąryšį.
Cliffordo algebros (12.71) ir matricų algebros (12.78) izomorfizmų visiškaipakanka nustatyti, kokiomis matricomis galima atvaizduoti bet kokią Cliffordoalgebrą.
3Algebra vadinama paprasta, jei bet kokių dviejų nenulinių elementų a 6= 0 ir b 6= 0 sandauganiekada nevirsta nuliu, ab 6= 0.
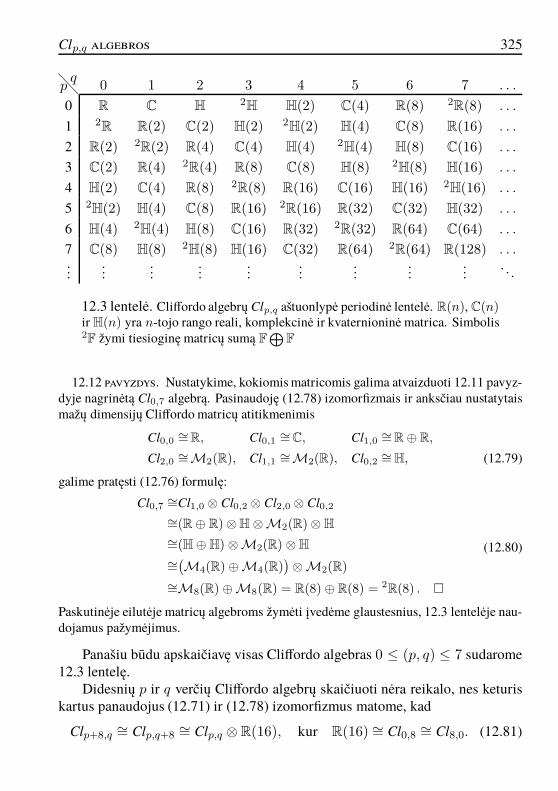
Clp,q algebros 325
pq
0 1 2 3 4 5 6 7 . . .
0 R C H 2H H(2) C(4) R(8) 2R(8) . . .
1 2R R(2) C(2) H(2) 2
H(2) H(4) C(8) R(16) . . .
2 R(2) 2R(2) R(4) C(4) H(4) 2
H(4) H(8) C(16) . . .
3 C(2) R(4) 2R(4) R(8) C(8) H(8) 2H(8) H(16) . . .
4 H(2) C(4) R(8) 2R(8) R(16) C(16) H(16) 2H(16) . . .
5 2H(2) H(4) C(8) R(16) 2
R(16) R(32) C(32) H(32) . . .
6 H(4) 2H(4) H(8) C(16) R(32) 2
R(32) R(64) C(64) . . .
7 C(8) H(8) 2H(8) H(16) C(32) R(64) 2R(64) R(128) . . ....
......
......
......
......
. . .
12.3 lentelė. Cliffordo algebrų Clp,q aštuonlypė periodinė lentelė. R(n), C(n)ir H(n) yra n-tojo rango reali, komplekcinė ir kvaternioninė matrica. Simbolis2F žymi tiesioginę matricų sumą F
⊕F
12.12 pavyzdys. Nustatykime, kokiomis matricomis galima atvaizduoti 12.11 pavyz-dyje nagrinėtą Cl0,7 algebrą. Pasinaudoję (12.78) izomorfizmais ir anksčiau nustatytaismažų dimensijų Cliffordo matricų atitikmenimis
Cl0,0 ∼=R, Cl0,1 ∼=C, Cl1,0 ∼=R⊕R,
Cl2,0 ∼=M2(R), Cl1,1 ∼=M2(R), Cl0,2 ∼=H, (12.79)
galime pratęsti (12.76) formulę:
Cl0,7 ∼=Cl1,0 ⊗ Cl0,2 ⊗ Cl2,0 ⊗ Cl0,2∼=(R⊕ R)⊗H ⊗M2(R)⊗ H
∼=(H⊕ H) ⊗M2(R) ⊗H
∼=(M4(R) ⊕M4(R)
)⊗M2(R)
∼=M8(R) ⊕M8(R) = R(8) ⊕R(8) = 2R(8) .
(12.80)
Paskutinėje eilutėje matricų algebroms žymėti įvedėme glaustesnius, 12.3 lentelėje nau-dojamus pažymėjimus.
Panašiu būdu apskaičiavę visas Cliffordo algebras 0 ≤ (p, q) ≤ 7 sudarome12.3 lentelę.
Didesnių p ir q verčių Cliffordo algebrų skaičiuoti nėra reikalo, nes keturiskartus panaudojus (12.71) ir (12.78) izomorfizmus matome, kad
Clp+8,q∼= Clp,q+8
∼= Clp,q ⊗R(16), kur R(16) ∼= Cl0,8 ∼= Cl8,0. (12.81)

326 12 skyrius
p− q (mod 8) I2Clp,q p− q (mod 8) I2
Clp,qp+q=2m p+q=2m+1
0 +1 R(2m) 1 +1 R(2m)⊕ R(2m)
2 −1 R(2m) 3 −1 C(2m)
4 +1 H(2m−1) 5 +1 H(2m−1)⊕ H(2m−1)
6 −1 H(2m−1) 7 −1 C(2m)
12.4 lentelė. Aštuonlypė Cliffordo algebrų Clp,q periodinė lentelė suskirstytapagal p− q (mod 8) dalybos liekaną. Pusiau paprastos matricų grupės gauna-mos tik tada, kai vektorinės erdvės dimensija nelyginė (pseudoskaliaras komu-tuoja su visais algebros elementais), o jo kvadratas teigiamas. Tokios savybėsatitinka tą patį struktūrinio periodiškumo tipą p − q (mod 4) ≡ 1
Taigi, apskaičiavimai ima kartotis. Fizikams, kuriantiems naujus fizikinius mo-delius, tai yra požymis, kad naujų savybių, kurių nebūtų žemesnės dimensijosalgebrose, tikėtis jau neverta.
Suskirsčius algebras pagal p − q (mod 8) liekaną, 12.3 lentelę galima per-rašyti kitokiu pavidalu [70]. Taip perrašytoje lentelėje 12.4 jau matosi ne tikperiodiškumas, bet ir algebros struktūra. Šioje lentelėje pirmiausia krinta įakis dviejų tipų algebros, kurių dalybos iš 8 liekanos yra 1 ir 5. Šio tipo algebrų,izomorfiškų dviejų algebrų tiesioginei sumai, vektorinės erdvės dimensijos yranelyginės. Tai reiškia, kad algebrų pseudoskaliaras komutuoja su visais algebroselementais, o jo kvadratas yra teigiamas, I2 = 1. Taip pat nesunku pastebėti, kadabiejų rūšių algebrų struktūrinis tipas (t. y. periodiškumas p − q (mod 4)) yratas pats ir lygus vienetui. Pasirodo, abi paminėtos savybės ir nulemia pastebėtąišskirtinumą. Paaiškinsime kiek plačiau.
Matematinėse teorijose, kurios tiria grupes ir algebras, su visais kitais ele-mentais komutuojančių elementų rinkinys vadinamas centru. Jis, kaip ir sveikiejiskaičiai, žymimas simboliu Z. Centras vadinamas trivialiu, o tokį centrą turintialgebra — paprasta, jei jį sudaro vienintelis vienetinis elementas, ir netrivialiu,jei jis turi daugiau elementų. Abiejų išskirtinių algebrų dimensijos yra nelygi-nės, todėl šių algebrų centrą sudaro du elementai — skaliaras ir pseudoskaliaras,kurie abu komutuoja su visais algebros elementais. Kita svarbi savybė, būtent,I2 = 1, šiose algebrose leidžia apibrėžti du operatorius P± = 1
2 (1 ± I). Abuoperatoriai yra projektoriai, nes, kaip nesunku patikrinti, P 2
± = P±. Be to, ka-dangi P+P− = P−P+ = 0, tai operatoriai projektuoja į ortogonalius poerdvius,kurių tiesioginė suma yra visa pradinė erdvė P+ ⊕ P− = 1. Veikdami šiais

Clp,q algebros 327
Erdvė Algebra Taikymo sritis
R0,1 Cl0,1 ∼= C 1D erdvė, kompleksinių skaičių algebra
R0,2 Cl0,2 ∼= H 2D erdvė, kvaternionų algebra
R3,0 Cl3,0 ∼= C(2) 3D erdvė, Paulio matricos
R1,3 Cl1,3 ∼= H(2)
4D erdvė, reliatyvistinis erdvėlaikis,kvaternioninės matricos
R2,3 Cl2,3 ∼= C(4) Kvantinė mechanika, Diraco matricos
R4,1 Cl4,1 ∼= C(4) Majorana algebra, konforminė geometrija
12.5 lentelė. Svarbiausios fizikinės erdvės Rp,q, jų Cliffordo algebros Clp,q irjas reprezentuojančios matricos
projektoriais į algebros elementus juos visus suskirstome į dvi grupes, kurių tie-sioginė suma ir sudaro visą algebrą. Kadangi P+P− = P−P+ = 0, šio tipoalgebros jau nėra paprastos, nes paėmę nenulinius idempotentinius elementus,pavyzdžiui, P+ = 1
2 (1 + I) ir P− = 12(1− I) ir juos sudauginę gauname nulį.
Cliffordo algebrų periodine 12.3 lentele galima naudotis dvejopai. Pirma,jei žinome geometrinę algebrą, lentelė rodo, kokiomis mažiausiomis matricomisgalime pakeisti jos bazinius elementus. Kita vertus, jei jau turime matriciniu pa-vidalu užrašytą tiesinių algebrinių ar diferencialinių lygčių sistemą, tuomet galimnustatyti, kurioje mažiausios dimensijos Cliffordo algebroje šią sistemą galėtumeužrašyti. Įdomu, kad aštuonlypė periodinė lentelė taikoma ir fizikoje. Neseniai jaremiantis pavyko suklasifikuoti topologinius izoliatorius ir superlaidininkus [71].
Svarbesnes Cliffordo algebras ir joms izomorfiškas matricas, kurios sutinka-mos fizikoje, surašėme 12.5 lentelėje. Iš jos matyti, kad mus supančią trimatęerdvę — kaip ne keistai tai gali atrodyti — paprasčiausiai aprašo trys komplek-sinės 2 × 2 Paulio matricos, o ne 3 × 3 realios matricos, taip paplitusios vado-vėliuose. Taip yra todėl, kad realios trimatės matricos negali aprašyti elektronosukinio. Mažiausio rango matricos, kurios aprašo reliatyvistinį erdvėlaikį, yra2 × 2 kvaternioninės matricos, o ne visuotinai taikomos 4 × 4 kompleksinėsDiraco matricos. Deja, ankstesniuose skyriuose mes tradiciškai irgi naudojomeDiraco matricas, tačiau Cliffordo algebra mums bado „pirštu“ ir rodo, kad tainėra pačios mažiausios matricos, todėl ir pasirinktas aprašymo būdas nėra opti-maliausias. Pasiteisinti galima tik tuo, kad reliatyvistinės kvantinės mechanikosteorija vystėsi nepriklausomai nuo Cliffordo algebros, kuri tuo metu dar nebuvosusiformavusi. Todėl joje nusistovėjo neoptimalus matematinis aparatas. Galbūtkada nors tai pasikeis.

328 12 skyrius
a) b) c)
12.2 pav. Daugdaros M ir jos krašto ∂M tarpusavio orientacijos pagrindinėjeanalizės teoremoje vienmačiu, dvimačiu ir trimačiu atvejais. a) Kreivė C ir josgaliniai taškai ∂C = ±1. b) Dvimačio paviršiaus S pseudoskaliaras kontūre∂S indukuoja priešingos krypties orientaciją. c) Rutulio V pseudoskaliaro in-dukuotaorientacija ant jį gaubiančio krašto, t. y. sferos ∂V , yra to paties ženklo.Vektoriai e1 ir e2 yra liestinės, o n statmenas sferos paviršiui
12.6. Pagrindinė analizės teorema. Orientuotasis integralas⋆
Suformuluosime bendrą pagrindinės analizės teoremą. Ji skamba taip: to-lydaus multivektorinio lauko F(x), apibrėžto orientuojamoje daugdaroje4 M irturinčio tolydines išvestines visur, išskyrus galbūt jos kraštą5 ∂M , integralamsgalioja lygybė
ˆ
M
dmx∂F =
ˆ
∂M
dm−1x F. (12.82)
Lygybėje pasirodžiusi vektorinė išvestinė ∂ reiškia, kad formulė galioja ir krei-voms erdvėms. Jei erdvė plokščia, tada ∂ galima pakeisti į tokio pat mato ∇. Čiadmx ir dm−1x žymi orientuotus abiejų daugdarų tūrio elementus. Pavyzdžiui,dx3 ir dx2 bus orientuoto 3D tūrio ir jį gaubiančio orientuoto 2D paviršiaus ele-mentai, kaippavaizduota12.2c paveiksle. Orientaciją nusakom-matės ir (m−1)-matės daugdaros pseudoskaliarai Im ir Im−1. Todėl dmx = Imd
mx, kur dmxdabar žymi tradicinį (neorientuotą) elementarų daugdaros tūrio elementą. Ati-tinkamai dm−1x = Im−1d
m−1x. Atkreipkite dėmesį, kad skirtingai nuo (6.95),
4Daugdarą įsivaizduosime kaip „kreivą“ erdvę, lokaliai panašią į Euklido erdvę, t. y. tokią,kurioje galima apibrėžti visur teigiamą atstumo tarp gretimų taškų sąvoką. Nors laikantis tokioapibrėžimo Minkowskio erdvė jau nėra tradicinė daugdara, daugelis (bet ne visos) Riemanno geo-metrijos teoremų galioja ir šioms, taip vadinamoms pseudo-Riemanno daugdaroms.
5Topologijoje simboliu ∂ įprasta žymėti daugdaros kraštą. Su vektorine išvestine, žinoma, taineturi nieko bendra.

Clp,q algebros 329
bendroje (12.82) formulėje šie daugdarų orientuotų tūrių elementai dabar stoviprie integralo ženklo. Taip užrašius teoremos formulė supaprastėja, nes orien-tuoti tūrio elementai bendru atveju su bet kokio rango multivektoriaisF nekomu-tuoja.
Atskirai būtina paaiškinti, kaip susijusios daugdaros ir jos paviršiaus orien-tacijos. Akivaizdu, kad (12.82) formulėje abiejų orientacijų laisvai pasirinkti ne-galima, nes nuo to priklauso integralų ženklai. Todėl susitarta jas parinkti taip,kad abu orientuotus tūrio elementus sietų ryšys Im = Im−1 ∧ n, kur n žymikiekviename taške statmeną m − 1 daugdaros paviršiui ir nukreiptą išorėn vie-netinį vektorių. Šį sąryšį lengviausia suprasti pažvelgus į 12.2 paveikslą, kurisvaizduoja daugdaros M ir jos krašto ∂M orientacijas vienmačiu, dvimačiu irtrimačiu atvejais. Matome, kad trimačio rutulio V paviršiui ∂V statmenas vie-netinis vektorius n paimtas taip, kad paviršiui liestinėje plokštumoje pasirinkusI2 = e1 ∧ e2, 3D tūryje turime imti I3 = I2 ∧ n = e1 ∧ e2 ∧ n. Panašiai pa-viršiaus S kontūrą ribojančią liestinę nukreipę e1 kryptimi, I1 = e1, paviršiauselementą turime orientuoti kaip I2 = e1 ∧ n. Šią orientaciją vaizduoja riestarodyklė jo centre. Kaip matome iš paveikslo, paviršiaus ir jį gaubiančio kontūroorientacijų rodyklės šiuo atveju yra priešingų krypčių. Vienmatis atvejis irgi pa-klūsta bendrai susitarimo taisyklei. Kadangi linijos kraštą sudaro du ekstremalūstaškai (skaliarai), kuriuos galime pavadinti pradžia −1 ir pabaiga +1, tai taškeI0 = +1 irgi galime laikyti, kad kreivės orientacija yra I1 = (+1)n.
Pažvelgę į 12.2 paveikslą matome, kad taškui judant daugdaros kraštu lies-tinio paviršiaus pseudoskaliarą Im−1 sudarantys vektoriai keičia savo kryptį irdydį. Todėl kyla klausimas, ar susitarimas dėl pseudoskaliarų orientacijos san-daugoje Im = Im−1 ∧ n, kurios kairėje pusėje stovi nekintantis plokščios erdvėspseudoskaliaras Im, o dešinėje pusėje kiekviename taške besikeičiantis liestinėserdvės pseudoskaliaras Im−1 ir vektorius n, yra neprieštaringas. Iš tiesų jokiosprieštaros čia nėra. Kaip išsiaiškinome dar pirmame skyriuje, mentė — tametarpe ir pseudoskaliaras — neturi jokios konkrečios geometrinės formos, norspatogumo dėlei ją dažniausiai ir vaizduojame lygiagretainiais, gretasieniais arpanašiais iš vektorių sudarytais orientuotais objektais. Iš tikrųjų svarbus yra tikpseudoskaliaro dydis ir jo vidinė orientacija (plius arba minus), nes pseudoska-liaro padėtis erdvėje fiksuota — jis ją visą užpildo. Pavyzdžiui, 12.2b paveiksleprie dviejų elipsės pavidalo disko krašto taškų pavaizduoti baziniai vektoriai su-daro po bivektorių, t. y. plokštumos pseudoskaliarą. Tačiau tą patį pseudoska-liarą vaizduoja ir šalia pavaizduoti skrituliai, kurie abiejuose taškuose atrodo jauvienodai.
Kita vertus, jei paimtume uždarą kreivę, pavyzdžiui, elipsę, gautume vienma-tę kreivą erdvę. Šios vienmatės erdvės pseudoskaliaras I1(x) yra kreivės liestinė.

330 12 skyrius
Didesnės dvimatės erdvės stebėtojo požiūriu šios liestinės orientacija taškui ju-dant ratu elipse keičiasi. Tačiau vienmatės erdvės stebėtojui ji kaip vienmatėserdvės pseudoskaliaras visoje elipsėje yra orientuota ta pačia kryptimi. Todėlpseudoskaliaro ženklas (orientacija) priklauso tik nuo judėjimo elipse krypties(prieš ar pagal laikrodžio rodyklę). Pseudoskaliaro dydis judant kreive apskritaikalbant gali keistis, nebent naudotume kiekviename taške ortonormuotą (neko-ordinatinę) bazę. Taigi, uždavus 1D erdvės orientaciją, taškui judant elipse I1nesikeičia. Tačiau 2D erdvės, į kurią įdėjome uždarą vienmatę kreivę, požiūriutaškui judant I1 keičia savo kryptį. Tai kreivos vienmatės erdvės požymis6. Ži-noma, taip vaizdžiai jį pamatyti gali tik didesnės dimensijos erdvėje gyvenantisstebėtojas. Šiam stebėtojui netgi atrodo, kad tam tikruose taškuose liestinės kryp-tis pasikeičia į priešingą, nes uždaroje kreivėje į pradinį tašką galime sugrįžti tikkada nors pradėję judėti priešinga kryptimi.
Panašiai yra ir su paviršiais, pavyzdžiui, sfera, kurią galima įdėti7 į 3D erdvę.Orientuotą 2D paviršių irgi nusako vienas I2(x) pseudoskaliaras (judant pavir-šiumi gali keistis tik jo dydis), nepriklausomai nuo to, ar paviršius plokščias, arkreivas. Tačiau sferą įdėjus į 3D erdvę bivektorius I2 trimatės erdvės požiūriuvėlgi jau nėra pastovus — liestinė sferai I2 plokštuma 3D erdvėje keičia savopadėtį. Šioje knygoje skaičiavimus vykdėme tik plokščioje erdvėje, į kurią talpi-nome mažesnio mato plokščias ar kreivas daugdaras. Nors knygoje nagrinėdamielektrodinamiką ir Diraco lygtį visur manėme, kad mus supantis erdvėlaikis yraplokščias, šiuolaikiniai kosmologiniai tyrimai rodo, kad jis yra šiek tiek krei-vas [72]. Todėl kreivų erdvių geometrija ir analizė, kurioje įdėtis iš anksto nėrapostuluota (arba jei įdėjimas įmanomas tik į dviem arba daugiau dimensijų di-desnę erdvę, kuomet įprastiniai apskaičiavimų metodai neveikia), išlieka svarbi.
6Paviršiaus kreivumas yra daugialypė savoka. Jis gali būti suprantamas kaip paviršiaus išori-nė arba vidinė savybė. Išorinio kreivumo sąvoka remiasi paviršiaus įdėjimo (angl. embedding) įdidesnės dimensijos Euklido erdvę koncepcija. Vidinis kreivumas grindžiamas ant paviršiaus „gy-venančio“ stebėtojo galimybėmis aptikti, pavyzdžiui, matuojant trikampio kampų sumą, nuokrypįnuo Euklido erdvės savybių. Laikantis tokio požiūrio cilindro paviršius, kurio kreivumas trimatėjeerdvėje yra akivaizdus, vidinio stebėtojo požiūriu yra neatskiriamas nuo plokštumos, nes cilindropaviršiaus vidinis kreivumas yra nulis.
7Įdėjimas (angl. embedding) reiškia, kad aukštesnės dimensijos Euklido erdvėje galime apra-šyti paviršiaus jungumą ir visas jo savybes. Paviršiaus patalpinimas į erdvę, kurioje jį galima kaipnors pavaizduoti, vadinamas panarinimu arba įmerkimu (angl. immersion). Pavyzdžiui, dvimatėMöbiuso juosta (neorientuotas 2D paviršius su kraštu) patalpinta į 3D erdvę išsaugos visas topo-logines savybes ir savęs niekur nekirs. Taigi, tai įdėtis. Tačiau norint pavaizduoti Kleino butelį(neorientuotą 2D paviršių, bet be krašto) taip, kad jis savęs niekur nekirstų, būtina 4D erdvė. Pa-talpinus Kleino butelį 3D erdvėje jį galima pavaizduoti tik kaip save kertantį paviršių, tačiau tadakai kurios topologinės savybės skirsis. Taigi, turėsime įmerktį. Kita vertus 3D erdvėje patalpinędvimatę sferą (uždarą ir orientuotą 2D paviršių) jau turėsime ne tik įmerktį, bet ir įdėtį.

Clp,q algebros 331
Geometrinės algebros knygose įrodoma, kad pagrindinę analizės (12.82) teoremągalima taikyti ir daugdaroms su skylėmis, pavyzdžiui, torui. Iš jos kaip atskiriatvejai išplaukia tradicinės analizės Gausso ir Stokes’o teoremos. Pademonstruo-sime, kaip jos gaunamos.
12.6.1. Gausso teorema. 3D erdvėje Gausso teorema teigia, kad vektori-nio lauko divergenciją tūryje V galima apskaičiuoti integruojant vektorinį laukąišilgai tą tūrį gaubiančio paviršiaus S = S(V ), žr. 12.2c pav.,
˚
V
div f dV =
¨
S(V )
f · dσ. (12.83)
Dešinėje pusėje po integralu stovi vektorių vidinė sandauga, kurσ žymi kiekvie-name taške paviršiui S statmeną ir išorėn orientuotą vienetinį vektorių, kuriuotradicinėje analizėje nusakomas elementarus paviršiaus plotelis, dσ = n dS.
Pirmiausia pastebėsime, kad plokščioje3D Euklidoerdvėje apibendrintavek-torinė išvestinė∂ sutampa su nabla, t. y. ∂ = ∇, kaip 6.20 pavyzdyje, o pseudo-skaliaras I3 kiekviename tūrio elemente yra tas pats. Kadangi n2 = 1, pseudo-skaliarą I2 užrašysim taip: I2 = I2n
2 = I3n. Todėl d2x = I2d2x = I3n d2x.
Kadangi Cl3,0 algebroje pseudoskaliaras I3 komutuoja su visais algebros elemen-tais, iš (12.82) formulės gauname
˚
V
I3∇f d3x =
¨
S
I3nf d2x. (12.84)
Suprastinę iš I3 bei prisiminę, kad geometrinė dviejų vektorių sandauga duodaskaliarą ir bivektorių, sulyginame abiejų (12.84) pusių skaliarines dalis. Rezultasyra ˚
V
∇ · f d3x =
¨
S
f · n d2x. (12.85)
Tai ir yra klasikinė Gausso teorema, užrašyta geometrinės algebros terminais.Kadangi tradicinėje algebroje tokio objekto kaip bivektorius nėra, tai paviršiauselementą galime nusakyti tik jam statmenu vektoriumi n. Kitaip tariant, turim ra-šyti n d2x = dσ. Geometrinėje algebroje jį atitinka n d2x = ⋆Bd2x = ⋆(dS),t. y. be galo mažas vektorius, dualus paviršiaus elementui S . Todėl integralas˜
S f ·dσ dar vadinamas srauto integralu. Jei sulygintume (12.84) lygybės bivek-torines dalis, gautume retai tradicinėje analizėje sutinkamą tapatybę f rotoriui
˚
V
∇× f dV =
¨
S
dσ × f , (12.86)
kur kryžiukas žymi vektorinę sandaugą.

332 12 skyrius
12.3 pav. Tūrį ribojantys paviršiaiS2: z = 4−x2−y2 ir S1: z = 0. Išparaboloidinio S2 paviršiaus kyšotrimačio lauko f (x) vektoriai, kuriepaviršiuje S1 yra lygiagretūs dugnoplokštumai
12.13 pavyzdys. Paimkime tūrį, kurį iš vir-šaus riboja paviršius z(x, y) = 4 − x2 − y2,o iš apačios z = 0 plokštuma. Tegu visa-me tūryje apibrėžtas vektorinis laukas f (x) =−ye1 + xe2 + z2e3. Prie koordinačių ne-rašome nei apatinių, nei viršutinių indeksų,nes nagrinėjamu atveju dualūs vektoriai su-tampa, ei = ei. Tūrį gaubiantis paviršiusir iš jo kyšantis vektorinis laukas pavaizduoti12.3 paveiksle. Patikrinsime Gausso teoremągeometrinėje algebroje (12.85) šiuo konkrečiuatveju.
Pirmiausia randame, kad ∇ ·f =(e1 ∂
∂x+
e2 ∂∂y + e3 ∂
∂z
)·(−ye1 + xe2 + z2e3
)= 2z.
Ties pagrindu, kur z = 0, paviršių susikirti-mas duoda kreivę,x2+y2 = 4, todėl nesunkiaiapskaičiuojame kairę (12.85) lygybės pusę:
˚
V
∇ · f d3x =
ˆ 2
−2
dx
ˆ
√4−x2
−√4−x2
dy
ˆ 4−x2−y2
0
2zdz =64π
3. (12.87)
Norint apskaičiuoti dešinę (12.85) pusę, reikia surasti paviršių S1 ir S2 elementus irjiems statmenus vektorius. Plokštumos S1(z = 0) statmuo, akivaizdu, yra n = −e3(minusas, nes n nukreiptas į išorę, t. y. žemyn nuo uždaro paviršiaus). Šiam paviršiausgabalui dešinės (12.85) pusės pointegrinis reiškinys virsta f · n = f · (−e3) = −z2.Kadangi visuose dugno taškuose pointegrinė funkcija lygi nuliui, z = 0, tai paviršiausdugnas įnašo į dešinės (12.85) pusės integralą neduoda. Tai matyti ir iš to, kad dugne f
ir n yra visur vienas kitam statmeni.Paraboloidinio paviršiausS2 = xe1+ ye2 +(4−x2− y2)e3 orientuotą plotelį dσ
apskaičiuosime kaip dviejų paviršiui liestinių vektorių išorinę sandaugą: dσ = ∂S2
∂x∧
∂S2
∂y =(e1−2xe3
)∧(e2−2ye3
)= e12−2ye13+2xe23. Statmuo šiam paviršiui yra
n = dσI−1 =(e12−2ye13+2xe23
)e3e2e1 = 2xe1+2ye2+e3, todėl dešinės (12.85)
pusės pointegrinis reiškinysvirsta f ·n =(−ye1+xe2+z2e3
)·(2xe1+2ye2+e3
)= z2.
Taigi, viskas susiveda į paprastą dvigubą integralą, kuriame d2x reiškia dxdy:
¨
S2
z2d2x =
ˆ 2
−2
dx
ˆ
√4−x2
−√4−x2
dy(4− x2 − y2
)2=
64π
3. (12.88)
Kaip ir turi būti, abu rezultatai — integralinis vektorinio lauko srautas per paviršių ir topaties lauko divergencijos integralas visu tūriu — sutampa.

Clp,q algebros 333
12.6.2. Stokes’o teorema. Tradicinė jos formuluotė sako, kad vektoriniolauko rotoriaus integralą išilgai paviršiaus S galima pakeisti vektorinio lauko li-nijiniu integralu išilgai tą paviršių ribojančio kontūro, kaip pavaizduota 12.2bpaveiksle,
¨
S
(∇× f) · dσ =
˛
C(S)
f · ds. (12.89)
Kitaip sakant, apie sūkurio stiprį paviršiuje S galima spręsti iš sūkurio linijų antpaviršiaus krašto C. Paėmę dešinę pagrindinės teoremos (12.82) pusę, kai F = f
ir d2−1x = ds, ir iš jos išskyrę skaliarinę dalį matome, kad ji iš karto sutampa su(12.89) dešine puse. Tuo tarpu kairėje (12.82) lygybės pusėje esančią geometrinęsandaugą pirmiausia geriau suskaidyti į skirtingų rangų narius
¨
S
d2x∂f =
¨
S
d2xÄ∂ · f + ∂ ∧ f
ä, (12.90)
kur ∂ · f yra skaliaras, o ∂ ∧ f bivektorius. Kadangi dešinėje pusėje buvome iš-skyrę skaliarą, tai, kaip matyti iš (12.90) išraiškos, kairėje (12.82) lygybės pusėjestovintį skaliarą galima gauti tik iš sandaugos d2x(∂ ∧ f) išskyrus simetriškąvidinę dalį d2x · (∂ ∧ f). Tačiau tradicinį pavidalą bus surasti paprasčiau, jeiprieš tai pasinaudosime dualizacijos metodu (3D erdvėje) ir į geometrinę san-daugą įterpsime minus vienetą −1 = (−I3)(−I3). Tada pertvarkę d2x (∂ ∧ f
äišraišką paskutiname etape skaliarinę sandaugą išskirsime tokiu būdu:¨
S
d2x (∂ ∧ f) = −¨
S
(−I3d2x)Ä−I3(∂ ∧ f)
ä= −
¨
S
(⋆B)d2x (∂ × f)
= −¨
S
nd2x (∂ × f)skaliaras⇒ −
¨
S
(∂ × f) · dσ . (12.91)
Norėdami sulyginti išraiškas, kreivo paviršiaus vektorinę išvestinę ∂ dar turi-me pakeisti 3D nabla ∇. Prisiminę, kad ∂ yra išvestinė išilgai 2D paviršiaus,galime rašyti ∇ = ∂ + ∇⊥, kur ∇⊥ = n∂n yra statmenas paviršiui vekto-rius, o ∂n = n · ∇ yra kryptinės išvestinės statmena paviršiui kryptimi ope-ratorius. Taigi, jis lygiagretus vektoriui dσ = nd2x, todėl (∇ × f) · dσ =((∂ + n∂n)× f) · dσ = (∂ × f) · dσ, kur pertvarkydami pasinaudojome vek-torių savybe (a × b) · a = 0. Deja, bet minuso ženklo pakeisti negalime. Taireiškia, kad tradicinėje analizėje paviršius ir jį ribojanti kreivė turi būti orien-tuoti priešingai negu pavaizduota 12.2b paveiksle. Jau minėjome, kad geomet-rinės algebros susitarimas leidžia suformuluoti pagrindinę analizės teoremą bet

334 12 skyrius
kokioms dimensijoms. Tradicinėje Stokes’o teoremoje paviršiaus ir kreivės tar-pusavio orientacija yra priešinga universaliam geometrinės algebros susitarimui.
12.14 pavyzdys. Apskaičiuosime sūkurio dydį tame pačiame 12.3 paveikslo para-boloidiniame paviršiuje S2: z = 4 − x2 − y2 , bet be dugno. Vektorinis laukas f =−ye1 + xe2 + z2e3 dabar yra apibrėžtas tik ant paraboloido paviršiaus, kurio kraštąplokštumoje z = 0 nusako lygtis x2+y2 = 4. Tuo pačiu patikrinsim, kaip šioje kreivoje2D erdvėje veikia Stokes’o teorema
¨
S
d2x · (∂ ∧ f ) =
˛
C(S)
f · ds. (12.92)
Dešinę (12.92) lygybės pusę apskaičiuoti nesunku. Kadangi paviršių z = 4−x2−y2ribojantis kontūrasC guli x-y plokštumoje, tai įvedus kampą ϕ kontūrą parametrizuojaapskritimas s = 2
(cosϕe1 + sinϕe2
). Jo lanko elementas yra ds = 2
(− sinϕe1 +
cosϕe2). Tada vektorinį lauką ant kontūrogalima užrašyti pavidalu fC = −ye1+xe2 =
2(− sinϕe1 + cosϕe2
), nes pats kontūras guli z = 0 plokštumoje. Lauko fC ir lanko
elemento ds vidinės sandaugos integralą išilgai kontūroC skaičiuojame pagal laikrodžiorodyklę, kaip to reikalauja 12.2b paveikslo susitarimas,˛
x2+y2=4
fC · ds =
ˆ 0
2π
2(− sinϕe1 + cosϕe2
)· 2(− sinϕe1 + cosϕe2
)dϕ
= 4
ˆ 0
2π
dϕ = −8π .
(12.93)
Kairę Stokes’o formulės (12.92) pusę apskaičiuoti kiek sudėtingiau. Nors orientuotą pa-viršiaus elementą d2x = dσ jau esame apskaičiavę 12.13 pavyzdyje,dσ = ∂S2
∂x∧ ∂S2
∂y=
e12 − 2ye13 + 2xe23, dar reikia apskaičiuoti lauko f vektorinės išvestinės antisimetri-
nę dalį ∂ ∧ f = 12
((tx ∂f
∂x + ty ∂f∂y
)−(∂f∂x t
x + ∂f∂y t
y))
, kur tx ir ty žymi dualios
bazės vektorius. Kadangi paviršiuiS2 liestinė erdvė yra dvimatė, šiuos vektorius apskai-čiuosime, pasinaudoję 6.19 pavyzdžio formulėmis (6.74), būtent, tx = −∂S2
∂ydσ
|dσ|2 ir
ty = ∂S2
∂xdσ
|dσ|2 . Pirmiausia apskaičiuojame |dσ|2 = dσdσ = 1 + 4x2 + 4y2. Tadaliestiniams vektoriams tx ir ty išreikštai gauname
tx =(1 + 4y2)e1 − 2x(2ye2 + e3)
1 + 4x2 + 4y2, ty =
−4xye1 + (1 + 4x2)e2 − 2ye31 + 4x2 + 4y2
.
(12.94)
Tokiu būdu
∂ ∧ f =(1 +
1
1 + 4x2 + 4y2
)e12 +
(x− 17x+ 2y
1 + 4x2 + 4y2
)e13
+(y +
2x− 17y
1 + 4x2 + 4y2
)e23 .
(12.95)

Clp,q algebros 335
Padauginę (12.95) vidine sandauga iš kairės iš paviršiaus elemento dσ turime dσ · (∂ ∧f ) = −2, o jį suintegravę vėl gauname jau žinomą rezultatą
−2
¨
S2
d2x = −2
ˆ 2
−2
dx
ˆ
√4−x2
−√4−x2
dy = −8π . (12.96)
12.7. Fundamentalusis vektorinis diferencialinis operatorius ∇6 skyriuje apibrėžėme trimatį nabla operatorių, kurį dabar apibendrinsime
bet kokioms n-matėms erdvėms:
∇ =n∑
i=1
ei∂
∂xi≡ ei
∂
∂xi≡ ei∂i . (12.97)
Kaip ir anksčiau, pasikartojantis indeksas rodo, kad sumuojama pagal visus bazi-nius vektorius. Dėl savo svarbos operatorius (12.97) geometrinėje algebroje darvadinamas fundamentaliu vektoriniu diferencialiniu operatoriumi. Kitaip negutrimatėje erdvėje, dabar nabla simbolio ∇ neparyškiname. Atliekant algebriniusveiksmus ∇ operatorius elgiasi kaip vektorius. Ir tikrai, jei šiuo operatoriumi pa-veiktume skaliarinę funkciją f(x), kurios argumentas yra vektorius x, gautumevektorinę funkciją. Pavyzdžiui, paveikę juo atvirkštinę koordinatę xi gaunamebazinį vektorių,
∇xi =∑
j
ej∂xi
∂xj=∑
j
ejδij = ei. (12.98)
Kita vertus, jei paimtume vektorinę funkciją f(x), tuomet apskaičiavę ∇ · f gau-tume skaliarą, o ∇∧ f — bivektorių. Todėl ∇f yra skaliaras + bivektorius.
Padauginę vektorinį (12.97) operatorių iš dualaus bazinio vektoriaus iš jo ne-sunkiai sukonstruojame skaliarinį diferencialinį operatorių, panašų į (6.40). Pa-vyzdžiui, išvestinės ei kryptimi operatorius yra ne kas kita, kaip ∇ projekcija įei kryptį. Jį gauname padauginę ej ∂
∂xjvidine sandauga iš ei
ei · ∇ =∑
j
ei · ej∂
∂xj=
∂
∂xi≡ ∂i . (12.99)
Todėl šis operatorius ir vadinamas kryptine išvestine (directional derivative) išil-gai vektoriaus, kuris šiuo atveju yra ei. Kryptinė išvestinė yra artimiausias įpras-tos išvestinės analogas, o jį suprantame (6.34) ribos prasme. Jei skaliariniu ope-ratoriumi (12.99) paveiktume atvirkštinę koordinatęxj , gautume jau ne vektorių,o skaliarą ∂ixj = δ
ji .

336 12 skyrius
Tačiau nei kryptinė išvestinė išilgai vektoriaus, nei fundamentalusis ∇ ope-ratorius nėra bendriausi geometrinės algebros diferencialiniai operatoriai. Kryp-tinę išvestinę išilgai vektoriaus galima apibendrinti multivektorinei funkcijai Fnuo multivektorinio argumento X „išilgai“ multivektoriaus A
∂AF(X) = limτ→0
F(X+ τA)− F(X)
τ, (12.100)
kur τ , kaip ir (6.34) apibrėžime, yra skaliaras. Jei multivektorius A skaičiuo-jamas pagal rangą, kuriam multivektorinė funkcija F nėra apibrėžta, tuomet iš-vestinę prilyginame nuliui, ∂AF(X) = 0. Pavyzdžiui, jei F yra funkcija tik nuovektorinio argumento x, o diferencijuojame pagal bivektorių A = e1e2, tuomet∂e1e2F(x) = 0.
Bendriausias multivektorinės išvestinės operatorius, kuris yra multivekto-rius plokščioje erdvėje, tuomet gali būti apibrėžtas taip:
=∑
J
e−1J ∂eJ , (12.101)
kur dabar J žymi bet kokių bazinių indeksų rinkinį. Taigi, J jau reiškia ne vienvektorius, kaip (12.97) formulėje, bet ir bivektorius, trivektorius ir t. t. Pavyz-džiui, jei J = 2, 4, tada eJ = e2e4 ir e−1
J = ±eJ , kur ženklas priklausonuo vektorių e2 ir e4 signatūrų. Vidine sandauga daugindami (12.101) operato-riaus sandus iš atitinkamų bazinių elementų galime išskirti įvairius skaliariniusoperatorius, kuriuos susumavę su atitinkamais baziniais elementais galime užra-šyti operatoriaus skleidinį. Toks skleidinys yra vadinamas operatoriaus Fourierskleidiniu,
=∑
J
e−1J 〈eJ〉0 . (12.102)
Žinoma, Fourier skleidiniu(nepainiokite su Fourier transformacija, kurią geomet-rinėje algebroje irgi nesunku apibrėžti [59]) galima išskleisti ne tik diferencijavi-mo, bet ir bet kokį kitą operatorių. Kai yra vektorius ∇, jam išskleisti užtenkavektorių sandų, panašiai kaip skleidžiant paprastą vektorių (2.10) formulėje,
∇ = ek(ek · ∇) ≡ ekek · ∇ , (12.103)
kur ek∂k vadinama nablos ∇ dekompozicija ei bazėje. Toliau apsiribosimetik vektoriniu fundamentaliuoju diferencialiniu operatoriumi ir jo savybėmis.
12.7.1. Skaliarinis laukas. Operatoriumi ∇ paveikę skaliarinį lauką φ(x),t. y. skaliarinę n-mačio vektoriaus x funkciją, gauname n-matį vektorinį lauką

Clp,q algebros 337
∇φ(x), kuris apibendrintai vadinamas gradientu. Pavyzdžiui, kai φ(x) = a · x,kur a pastovus vektorius, randame
∇(x · a) = ei∂i(xjaj) = eiδji aj = eiai = a . (12.104)
Taigi, atsakymas yra vektorius a. Svarbu tai, kad atsakymas nepriklauso nuovektorinės erdvės dydžio ir jos metrikos.
Lygiai tokiu pačiu būdu apskaičiuojame ir vektoriaus kvadrato išvestinę,
∇x2 = (ei∂i)(xjxj) = ei2xjδ
ji = 2eixi = 2x . (12.105)
12.15 pavyzdys. Pakartokime (12.105) apskaičiavimus bekoordinatiniu būdu:
∇x2 = ∇(x·x) = ∇(x·x)+∇(x·x) = ∇(x·x)+∇(x·x) = 2∇(x·x) = 2x , (12.106)
kur pasinaudojom tuo, kad skaliarinė sandauga komutuoja, o taip pat (12.104) formule,nes nabla veikia tik į vieną iš x-ų.
12.16 pavyzdys. Vektoriaus normayra |x| = √x · x =
√x2. Pasinaudoję (12.106) fo-
mule rasim normos gradientą
∇|x| = ∇√x2 =
1
2√x2
∇x2 =2x
2√x2
=x
|x| . (12.107)
12.7.2. Vektorinis laukas. Kaip minėta, fundamentalusis ∇ algebriniu po-žiūriu elgiasi kaip vektorius. Todėl, paveikę operatoriumi ∇ vektorių a(x), t. y.vektorinę vektoriaus x funkciją, gauname skaliarą ir bivektorių,
∇a(x) = ∇ · a(x) +∇∧ a(x) . (12.108)
Pirmąjį narį (skaliarą) galima pavadinti apibendrinta divergencija, o antrąjį (bi-vektorių) — apibendrintu rotoriumi. Koordinatinis jų pavidalas yra
∇ · a(x) =Äek∂k
ä· a(x) = ∂k(e
k · a(x)) = ∂kak(x), (12.109a)
∇∧ a(x) = (ei∂i) ∧ a(x) = ei ∧Ä∂ia(x)
ä
= ei ∧Ä∂ie
jaj(x)ä= ei ∧ ej∂iaj(x).
(12.109b)
Kadangi paskutinė išraiška yra bivektorius, todėl i 6= j. Pavyzdžiui, paėmę vek-torinį lauką a(x) = x randame, kad ∇x yra skaliaras, kurio vertė lygi erdvėsdimensijai
∇x = (ei∂i)(ejxj) = eiejδ
ji = n , (12.110)
nes eiei = n, kurią gauname susumavę pagal visus bazinius vektorius. Iš čia ma-tome, kad bet kokioje, nebūtinai ortogonalioje ar normuotoje bazėje ej, kuriosatvirkštinė bazė ej apibrėžiama lygtimi ej · ek = δkj , nabla apibendrinamastokiu būdu:
∇ ≡ ej(ej · ∇). (12.111)

338 12 skyrius
Funkcija Vektorinė išvestinė Kryptinė išvestinėf1 = x ∇f1 = n a · ∇f1 = a
f2 = x2 ∇f2 = 2x a · ∇f2 = 2a · xf3 = |x| ∇f3 = x/|x| a · ∇f3 = a · x/|x|f4 = x · 〈A〉k ∇f4 = k〈A〉k a · ∇f4 = a · 〈A〉kf5 = ln r ∇f5 = r−1 = r/|r|2 a · ∇f5 = a · r/|r|2r = x − x0
12.6 lentelė. Vektorinės ir kryptinės (skaliarinės) išvestinės veikimo į multi-vektorines funkcijas fi pavyzdžiai
12.17 pavyzdys. Įsitikinsime, kad ∇x = n. Iš tiesų,
∇x = ∇ · x+∇ ∧ x = n+ 0 = n, (12.112)
nes vidinėje sandaugoje vektorių projekcijos yra vienodos, o išorinėje — skirtingos. Dėlšios priežasties į vidinę sandaugą įeina tuos pačius indeksus turintys nariai ∂xi/∂xi, o įišorinę — skirtingus, kurie visi lygūs nuliui ∂xi/∂xj = 0.
12.7.3. Multivektorinis laukas. Fundamentaliuoju nabla operatoriumi ga-lima veikti ir multivektorinius laukus, pavyzdžiui, bivektorinį. Paimkime r-ojorango multivektorinį lauką Ar(x), kuris priklauso nuo vektoriaus x. Lauką pa-veikę ∇ operatoriumi gauname
∇Ar(x) = ek∂kAr(x) . (12.113)
Geometrinė sandauga tarp ek ir ei bazinių vektorių multivektoriujeAr(x) duosarba vienu rangu žemesnį r − 1, arba rangu aukštesnį r + 1 multivektoriniuslaukus
∇Ar(x) = 〈∇Ar〉r−1 + 〈∇Ar〉r+1 ≡ ∇ · Ar +∇∧ Ar , (12.114)
kuriuos pavadinsime apibendrinta divergencija (vidine išvestine) ir rotoriumi (iš-orine išvestine). Taigi, geometrinė algebra rodo, kad apibendrinta divergencija∇ · Ar ir apibendrintas rotorius ∇ ∧Ar yra susiję operatoriai. Tai labai svarbu,nes geometrinės algebros ∇ operatorius turi atvirkštinį operatorių, kai tuo tarpuatskirai divergencijos ir rotoriaus operatoriams atvirkštiniai neegzistuoja. Todėlgeometrinė algebra leidžia spręsti sudėtingesnius uždavinius ir rasti jų diferen-cialinių lygčių Greeno funkcijas. Kaip tai padaryti, rašoma knygose [5, 13].
12.6 lentelėje pateikėme keletą multivektorinių funkcijų fi išvestinių pavyz-džių. Daugiau jų rasite darbuose [73–75]. Paskutiniame stulpelyjeužrašyta kryp-

Clp,q algebros 339
tinė išvestinė (12.99) išilgai laisvai pasirinkto vektoriaus a,
a · ∇ =n∑
i=1
ai∂i . (12.115)
(12.115) išraiška dar vadinama skaliarine išvestine. Jei a pakeisime į ek , gausimetą pačią (12.99) formulę. Paveikę operatoriumi a · ∇ multivektorinį lauką A,randame jo kitimo greitį išilgai vektoriaus a krypties. Todėl dydis (a · ∇)A,panašiai kaip f ′dx, dar vadinamas multivektorinio lauko diferencialu.
12.8. Holomorfiškumo savybė ir bekoordinatinis išvestinės apibrėžimas⋆
Iš kompleksinių funkcijų teorijos žinome, kad kompleksinio kintamojo z =x + iy funkcija f(z) = u(x, y) + i(x, y) yra analizinė, t. y. jos išvestinės vertėdf(z)/dz nepriklauso nuo to, kokį argumento pokytį dz (realų, menamą ar jųtiesinę kombinaciją) paimsime tik tuo atveju, kai realiojiu ≡ u(x, y) ir menamojiv ≡ v(x, y) dalys tenkina Cauchy-Riemanno sąlygas
∂xu− ∂yv = 0, ∂xv + ∂yu = 0. (12.116)
Pavyzdžiui, f(z) = z2 = (x+ iy)2 = x2 − y2 + i2xy = u + iv yra analizinė,nes ∂xu− ∂yv = 2x− 2x = 0 ir ∂xv + ∂yu = 2y − 2y = 0.
12.8.1. Holomorfinės funkcijos. Vienas iš paprasčiausiųbūdų apibendrintianaliziškumo sąlygą bet kokiai geometrinės algebros multivektorinei F funkcijaiyra pareikalauti, kad jos vektorinė išvestinė virstų nuliu:
∂F = 0 . (12.117)
Jei erdvė plokščia, vektorinę išvestinę galima pakeisti nabla operatoriumi, t. y.sąlyga ∇F = 0. Šią sąlygą tenkinančios funkcijos vadinamos holomorfinėmisarba monogeninėmis [17]. Parodysim, kad Cauchy-Riemanno sąlyga (12.116)yra dalinis (12.117) apibrėžimo atvejis. Kompleksinius skaičius, kaip 3.1 len-telėje, aprašysime Cl2,0 algebra (kompleksinė Cl0,1 algebra yra komutatyvi, to-dėl neįdomi), kurią sudaro elementai 1, e1, e2, e12 ir kurios lyginis poalgebrisyra 1, e12 ∈ Cl+2,0. Pseudoskaliaro, kaip ir menamojo vieneto, kvadratas yraneigiamas skaičius, t. y. e212 = −1. Patikrinkime, kad multivektorinė funkcijaF = u(x, y)+v(x, y)e12 yra monogeninė. Iš tiesų, paveikę ją nabla operatoriumi
∇F = (e1∂x + e2∂y)(u+ ve12) = (∂xu− ∂yv)e1 + (∂xv + ∂yv)e2(12.118)
matome, kad sąlyga ∇F = 0 bus patenkinama tik tada, jei (∂xu − ∂yv) = 0 ir(∂xv + ∂yv) = 0. Tai ir yra Cauchy-Riemanno analiziškumo sąlygos (12.116).

340 12 skyrius
12.18 pavyzdys. Cl3,0 algebroje funkcija F (x) = xa + 3ax yra monogeninė. Ištikrųjų,
∇F (x) = ∇(xa) +∇(3ax) = na+ 3(2− n)a. (12.119)
Kai n = 3, randame, kad ∇F (x) = 0.
12.19 pavyzdys. Parodysime, kad sferinėje koordinačių sistemoje (r, θ, ϕ) apibrėžtafunkcija
ψ(r, θ, ϕ) = rl sinl θelϕIσ3 = rl sinl θ(cos(lϕ) + Iσ3 sin(lϕ)
), (12.120)
kur l yra sveikasis skaičius, yra monogeninė. Tuo įsitikinti galima Cl3,0 vektorinį dife-rencialinį operatorių išreiškus sferinės koordinačių sistemos baziniais vektoriais
∇ = er∂
∂r+ eθ
1
r
∂
∂θ+ eϕ
1
r sin θ
∂
∂ϕ, (12.121)
ir funkciją išdiferencijavus. Per sferinius bazinius vektorius užrašę bivektorių Iσ3 gau-name Iσ3 = e12 = eθϕ cos θ − eϕr sin θ. Monogeninė funkcija ψ(r, θ, ϕ) pasirodojudesio kiekio momento tikrinių verčių lygtyje.
Praktiniuose uždaviniuose monogeninės funkcijos svarbios dėl keleto prie-žasčių. Viena vertus, funkcijos išvestinė neturi priklausyti nuo krypties, kuriąpasirenkame šią išvestinę skaičiuodami. Jei būtų kitaip, tokia išvestinė nebūtųnaudinga. Vienas iš būdų, užtikrinantis šią savybę, yra (12.117) sąlyga. Kitapriežastis yra ta, kad nabla operatoriaus tikrinėmis funkcijomis galima išskleistibet kokią funkciją ir taip daugiamatį uždavinį su vektoriniu diferencialiniu opera-toriumi pakeisti algebrinių lygčių sistema. Paveikę Laplace’o operatoriumi mo-nogeninę funkciją F gauname ∇(∇F ) = 0. Jei šaltinių nėra, ši lygtis apra-šo elektromagnetinių bangų skleidinį monogeninėmis funkcijomis daugiamatėseerdvėse.
12.8.2. Bekoordinatinis išvestinės apibrėžimas. Iki šiol operatorių∇ api-brėžėme arba per bazinius skleidinius, kaip (6.75), arba skaičiuodami ribą išilgaivektoriaus A = a, kaip (12.100) formulėje. Naudojant tiek vieną, tiek ir kitą api-brėžimą būtina įvesti konkrečią bazę. Tačiau egzistuoja dar vienas būdas išvesti-nei apibrėžti, kuriam konkreti bazė nebūtina. Šis būdas galimas tik geometrinėjealgebroje, o jis pagrįstas pagrindine analizės teorema (12.82). Apibrėžkime iš-vestinę naujuoju bekoordinatiniu būdu.
Tradiciniovektorinio skaičiavimovadovėliuose, nagrinėjančiuose tik 3D euk-lidinę erdvę, galima rasti formulių, kuriose gradiento, divergencijos ar rotoriausoperatoriai užrašomi pasitelkiant integralus. Pavyzdžiui, vektorinio lauko f di-vergencija apibrėžiama kaip srauto per be galo mažą uždarą paviršių S ir jo

Clp,q algebros 341
gaubiamo tūrio V santykis
div f = limV→0
¸
S f · dSV , (12.122)
kur dS = n dS yra elementarus orientuotas plotelis. Geometrinėje algebrojepanašiu būdu galima apibrėžti vektorinę išvestinę daugiamatėje bet kokios sig-natūros erdvėje.
Norėdami užrašyti panašią į (12.122) formulę, apskaičiuokimekairės (12.82)pusės integralą arti taško xi ∈ Mi, priklausančio labai mažam daugdaros MgabaliukuiMi. Kadangi vektorinė išvestinė taškexi tolydi, tai∂F(x) ≈ ∂F(xi).PseudoskaliarasMi daugdaros lopinėlyje irgi beveik pastovus Im(x) ≈ Im(xi).Todėlˆ
Mi
dmx∂F(x) =
ˆ
Mi
Im(x)dmx∂F(x) ≈
ˆ
Mi
Im(xi)dmx∂F(xi)
=Im(xi)∂F(xi)
ˆ
Mi
dmx = |Mi|Im(xi)∂F(xi) ,(12.123)
kur |Mi| žymi daugdaros gabaliukoMi tūrį. Dabar pasinaudokimedešine (12.82)puse ir apskaičiuokime ribą |Mi| → 0, išlaikydami tašką xi pasirinktame daug-daros gabaliuke xi ∈Mi. Turime
∂F(xi) = lim|Mi|→0
I−1m (xi)
|Mi|
˛
∂Mi
dm−1xF(x) . (12.124)
Ši formulė ir yra bekoordinatinis išvestinės apibrėžimas, kurio neįmanoma užra-šyti pasitelkus tradicinės analizės formalizmą. Jis apibendrina ne tik (12.122) for-mulę, bet ir daugelį kitų diferencialinės geometrijos formulių.
12.9. Vietoje pabaigos
Skaitytojas turėjo progą įsitikinti, kad daugiamačių erdvių geometriją ir al-gebrą galima patogiai aprašyti viena kalba. Todėl nieko nuostabaus, kad šiosteorijos pavadinimą „geometrinė algebra“ sugalvojo ir pasiūlė jos pradininkasW. K. Cliffordas. Tačiau geometrinė algebra susijusi ne tik su šiomis dviem ma-tematikos sritimis. Jos ryšį su kitomis taikomosiosmatematikos šakomis bendraisbruožais pavaizdavome Cliffordo geometrinės algebros genealoginiame medyje(12.4 paveikslas). Iš jo matome, kad geometrinė algebra betarpiškai siejasi sudaugeliu fizikams svarbių matematikos šakų — vektoriniu skaičiavimu, matri-cų teorija, tenzoriniu skaičiavimu ir kvantinės mechanikos sukinių algebra. Ji

342 12 skyrius
12.4 pav. Genealoginis geometrinės algebros medis pagal D. Hestenes. Storos strėlėsvaizduoja pagrindinę šaką. Nurodytas pirmtakas ir matematinės šakos gimimo metai
glaudžiai persipynusi ir su išorinių diferencialinių formų, dar vadinamų p formų(p forma iš esmės yra p rango mentė) algebra, kuri daug kuo panaši į geometrinęalgebrą. Perpratus vieną, nėra sunku suprasti ir kitą. Svarbiausias abiejų teorijųskirtumas slypi požiūryje į erdvės metriką: geometrinėje algebroje erdvės metri-ka atsiranda (postuluojama) automatiškai, pasirinkus vieną ar kitą konkrečią al-gebrą. Tuo tarpu išorinių formų algebroje metrika neapibrėžiama. Fizikoje labaiplačiai naudojamos abi algebros, tačiau kituose moksluose, pavyzdžiui, informa-tikoje, kompiuterinėjegrafikoje ar animacijoje, praktiškai taikoma tik geometrinėalgebra.

Clp,q algebros 343
Nors geometrinė (Cliffordo) algebra buvo atrasta dar XIX a., tačiau intensy-viai vystyti ją pradėta tik po 100 metų. Šiuolaikinės geometrinės algebros pavi-dalas siejamas su matematikų E. Artin [76], I. R. Porteous [77, 78] ir kt. darbais.Ypač didelį vaidmenį suvaidino D. Hestenes knygos [5, 12, 28], kurios parodė,kad ši teorija turi daugybę taikymų fizikoje. Šiuo vėlesniu geometrinės algeb-ros vystymosi laikotarpiu buvo išnagrinėtos ortogonalios transformacijos, tokioskaip sukimai, atspindžiai ir t. t., kurias aptarėme šioje knygoje, o taip pat visa ei-lė nepaliestų klausimų: bendresnės tiesinės transformacijos, tokios kaip išorinismorfizmas (angl. outermorphism), determinantai, simetrinės ir antisimetrinėstransformacijos, įvairūs projektoriai, sąsaja su grupių teorija. Be šioje knygojeaprašytos geometrinės algebros modelio, kuris dar vadinamas vektorinės erdvėsmodeliu, buvo pasiūlyta ir visa eilė išplėstinių geometrinės algebros modelių to-kių kaip homogeninis, projektyvinės erdvės, konforminis (nehomogeninis) ir darkeletas kitų. Šiuose modeliuose įvedus vieną ar kelis papildomus bazinius vek-torius atsiranda visa eilė naujų naudingų savybių. Pavyzdžiui, vektorinės erd-vės modelyje pridėję vieną papildomą bazinį vektorių gauname homogeninį geo-metrinės algebros modelį, kuriame transliacijas, kaip ir sukimus, aprašo ta patimultiplikatyvinė rotoriaus formulė. Mes knygoje transliacijas galėjome aprašy-ti tik adityviai. Atsiranda ir kitų svarbių skirtumų. Pavyzdžiui, skirtingai ne-gu vektorinės erdvės modelyje, homogeniniame modelyje spinduliai-vektoriai irposlinkių vektoriai jau vaizduojami skirtingai. Spinduliai-vektoriai nusako taš-ko padėtį, todėl, kaip ir anksčiau, vaizduojami vektoriais. Tuo tarpu poslinkiovektoriai (kryptinės atkarpos) homogeniniame modelyje jau vaizduojami bivek-toriais, orientuotos plokštumos — trivektoriais ir t. t. Pridėjus antrą papildomąbazinį vektorių gaunamas dar „galingesnis“ geometrinės algebros modelis. Ja-me mentės gali aprašyti ne tik hiperplokštumas, bet ir apskritimus, sferas ir pan.Nenuostabu, kad šios galimybės ypač vilioja robotų kūrėjus ir trimačių kompiu-terinių scenarijų programuotojus, kurie šiuos modelius daugiausia ir taiko.
Plėtojosi ir geometrinė analizė, kuri intensyviai vystosi ir dabar. Be hiper-kompleksinių funkcijų analizės, kuri apibendrina žinomas kompleksines funkci-jas bei integralinį-diferencialinį skaičiavimą (Cauchy teorema, rezidiumų teorija,Teodorescu tranformacija, vektorinės daugdaros ir pan.) daugiamatėms erdvėms,į geometrinę analizę buvo perkeltos integralinės transformacijos, tokios kaip Lap-lace’o ir Fourier, Z-transformacija, bangelių (angl. wavelets) teorija, kurios prak-tikoje yra labai svarbios apdorojant vaizdus ir atpažįstant objektus. Geometrinėsalgebros transformacijos šį darbą atlieka ne tik geriau už tradicines, bet ir grei-čiau, todėl jomis domisi daugelio taikomųjų sričių specialistai. Knygos priede

344 12 skyrius
skaitytojas ras rekomendojamų knygų sąrašą, kuris jam padės įsigilinti į vieną arkitą sritį.
Apibendrinant galėtume teigti, kad geometrinė algebra ir geometrinė analizėyra universali matematinė kalba, kuri savo paprastumo, aiškumo ir efektyvumodėka jau plačiai taikoma pačiose įvairiausiose srityse, kuriose iki šiol karaliavobendras ir universalus, tačiau visiškai neakivaizdus tenzorių (matricų) metodas,apie kurį seras A. Eddingtonas — vienas iš XX a. specialiosios reliatyvumo teo-rijos kūrėjų — dar kvantinės mechanikos aušroje atsiliepė taip:8 „...negaliu pati-kėti, kad kažkas tokio bjauraus kaip matricų daugyba vaidintų esminį vaidmenįgamtos sandaroje“ [79, p. 39].
Na, o šiuo metu visus vadovėlius persunkusią ir nenuoseklią polinių ir ak-sialinių vektorių koncepciją, paremtą vektorinės sandaugos apibrėžimu, reikėtųkuo greičiau užmiršti (šių skirtingų tipų vektorių negalima net sudėti, nes atspin-džio metu toks vektorius suskyla į du). Taigi, tradicinis vektorinis skaičiavimasjau yra istorijos dalis. Tai pripažįsta, pavyzdžiui, tokie buvę jos entuziastai kaipkompiuterinės grafikos specialistas J. A. Vince, kuris sužinojęs apie geometri-nę algebrą atšaukė iš leidėjo ką tik savo parašytą knygą apie vektorių taikymąkompiuterinėje grafikoje ir nedelsdamas parašė kitą — tik jau apie geometrinėsalgebros taikymą kompiuterinėje grafikoje [80, p. VII].
8Angliškai tai skamba taip: „...for I cannot believe that anything so ugly as the multiplicationof matrices is an essential part of the scheme of nature“.

13. Priedas
13.1. Cl3,0 ir Cl1,3 algebrų savybės
Cl3,0 algebros baziniai elementai ir savybės
σi yra baziniai vektoriai, λ — skaliaras, a, b — vektoriai, A,B — bivektoriai
σiσj = −σjσi, i 6= j Iσ1 = σ23, Iσ2 = σ31, Iσ3 = σ12
σ21 = σ2
2 = σ23 = 1 (Iσ1)
2 = (Iσ2)2 = (Iσ3)
2 = −1
σi = σi, σij = σji = −σij Iσi = −Iσi
I = σ1σ2σ3 = σ123 I2 = −1, I = −I, I−1 = −III = II = 1 Iσi = σiI, (Iσi)I = −σi
a · I = I · a = aI a ∧ I = 0
B · I = I · B = BI B ∧ I = 0
|a| =√a2 a−1 = a/|a|2
a · b = (ab+ ba)/2 a ∧ b = (ab− ba)/2
B · a = (Ba− aB)/2 B ∧ a = (Ba+ aB)/2
λ · σi = λ · Iσi = λ · I = 0a× b = −Iab
B = Ib
345

346 13 skyrius
Bivektorinės sandaugos Cl3,0 algebroje
a ir b yra vektoriai,A ir B — bivektoriai
A = Ia, B = Ib AB = 〈AB〉0 + 〈AB〉2〈AB〉0 = −a · b 〈AB〉2 = −a ∧ bA · B = 〈AB〉0 A∧ B = 0
|B| =√BB B−1 = −B/|B|2
eB =cos |B|+ B|B| sin |B|,
jei B2 < 0
eB =ch |B|+ B|B| sh |B|,
jei B2 > 0
Cl1,3 algebros baziniai elementai ir savybės
M yra multivektorius,α — skaliaras
γ20 = 1 γ21 = γ22 = γ23 = −1
σk ≡ γkγ0, σ2k = 1 σ1 = γ1γ0, σ2 = γ2γ0, σ3 = γ3γ0
(Iσk)2 = −1 Iσ1 = γ3γ2, Iσ2 = γ1γ3, Iσ3 = γ2γ1
Iσµ = σµI I(Iσµ) = (Iσµ)I
σk = −σk Iσk = −Iσk
Iγ0 = γ3γ2γ1, Iγ1 = γ0γ3γ2 Iγ2 = γ0γ1γ3, Iγ3 = γ0γ2γ1
Iγµ = −γµI I(Iγµ) = −(Iγµ)I
Iγµ = −Iγµ (Iγ0)2 = 1, (Iγk)
2 = −1
I = γ0γ1γ2γ3 = σ1σ2σ3 I2 = −1, I = I, I−1 = −I(γµ ·M) = −γµ ∧ (MI)I (γµ ∧M) = −γµ · (MI)I
eασk = chα + σk shα eαIσk = cosα + Iσk sinα

Priedas 347
13.2. Bendrieji vektoriai ir bivektoriai
Vektorių savybės
a yra vektorius, λ — skaliaras
a = |a|a a2 = aa = |a|2a · a = a2 a ∧ a = 0
|a| =√a2 a = a/|a|, a2 = 1
a−1 = a/|a|2 = a/|a| a−1a = aa−1 = 1
a = a Ûa = −a, a = −aa · λ = λ · a = 0 a ∧ λ = λ ∧ a = aλ
sin(λa) = a sinλ jei a2 = 1
cos(λa) = cos λ jei a2 = 1
sin(λa) = a shλ jei a2 = −1
cos(λa) = chλ jei a2 = −1
sin2(λa) + cos2(λa) = 1 jei a2 = ±1
eaλ = cos λ+ a sinλ jei a2 = −1
eaλ = chλ+ a shλ jei a2 = 1
Bivektorių savybės
Jei |B| = 0, bivektorius vadinamas nuliniu
|B|2 = B · B modulio kvadratas
B = B/|B| vienetinis
B = −B apgrąža
B−1 = B/|B|2 tik Cln,0 algebroje
B · λ = λ · B = 0jei λ yra skaliaras
B ∧ λ = λ ∧ B = BλeBλ = cos |B|λ+ B sin |B|λ jei B2 < 0
eBλ = ch |B|λ+ B sh |B|λ jei B2 > 0

348 13 skyrius
13.3. Vektorių sandaugos
Vektorių sandaugos savybės
a ir b yra vektoriai, θ — kampas (skaliaras) nuo vektoriaus a link vektoriaus b
Geometrinė sandaugaab = a · b+ a ∧ bba = a · b− a ∧ bab = eθa∧b = cos θ + a ∧ b sin θ
Vidinė (taškinė) sandauga
a · b ≡ 〈ab〉0 ≡ 〈ab〉a · b = 1
2 (ab+ ba)
a · b = b · a = |a||b| cosθ〈ab〉 = cos θ
Išorinė (pleištinė) sandauga
a ∧ b ≡ 〈ab〉2a ∧ b = 1
2 (ab− ba)
a ∧ b = −b ∧ a〈ab〉2 = a ∧ b sin θ
Sandaugų pirmumo taisyklė
Pradžioje atliekama vidinė, po to išorinė ir galiausiai geometrinė sandauga
Pavyzdžiaia · b c ≡ (a · b)ca ∧ b c ≡ (a ∧ b)ca · b ∧ c ≡ (a · b) ∧ c
Dviejų vektorių sandaugos
a ir b yra vektoriai
(ab)2 = (a · b)2 − a2b2
a2b2 = (a · b)2 − (a ∧ b)2aba = (a · b)a+ (a ∧ b) · a
(aba)2 = a4b2
a(a ∧ b) = (b ∧ a)aa ∧ b ∧ a =0

Priedas 349
Trijų vektorių sandaugos
a, b ir c yra vektoriai
abc = 〈abc〉1 + 〈abc〉3 = a(b · c) + a · (b ∧ c) + a ∧ b ∧ c〈abc〉0 ≡ 〈abc〉 = 〈abc〉2 = 0
〈abc〉3 = a ∧ b ∧ c = (abc− cba)/2
〈abc〉3 = 〈bca〉3 = 〈cab〉3(a · b) · c = a · (b · c) = 0
a · (b ∧ c) + b · (c ∧ a) + c · (a ∧ b) = 0, Jacobio tapatybė
a · (b ∧ c) = (a · b)c− (a · c)b(a ∧ b) · c = (c · b)a− (a · c)ba(b ∧ c) = a · (b ∧ c) + a ∧ b ∧ ca(b ∧ c) = (a · b)c− (a · c)b+ a ∧ b ∧ c(b ∧ c)a = (a · c)b− (a · b)c+ a ∧ b ∧ c
Keturių vektorių sandauga
a, b, c ir d yra vektoriai
(a ∧ b) · (c ∧ d) = a · d b · c− a · c b · d
13.4. Sandaugos su bivektoriais
Vektorių sandaugos su bivektoriais
a ir b yra vektoriai, B — bivektorius
aB = a · B + a ∧ BBa = B · a+ B ∧ a
a · B = 〈aB〉1 = (aB − Ba)/2vektorius
B · a = −a · B
a ∧ B = 〈aB〉3 = (aB + Ba)/2trivektorius
B ∧ a = a ∧ B
a · (b · B) = (a∧ b) · Bskaliaras
a · (BI) = a ∧ B I
a ∧ B ∧ b = −b ∧ B ∧ aa ∧ B ∧ a = 0

350 13 skyrius
Dviejų bivektorių sandauga
A ir B yra bivektoriai
AB = 〈AB〉+ 〈AB〉2 + 〈AB〉4A · B = 〈AB〉B · A =A · BA ∧ B = 〈AB〉4B ∧A =A∧ BA ∧A =0
13.5. Bendrosios menčių savybės
Ar žymi r-tojo rango mentę, kuri gaunama išorine sandauga sudauginus rtiesiškai nepriklausomų vektorių, pavyzdžiui,A3 = a∧ b∧ c arba (a+ b)∧ (b+c) = a ∧ b + a ∧ c + b ∧ b + b ∧ c = ab + ac + bc. Ortonormuotoje bazėjee1, e2, . . . , e3 galime užrašyti 2n menčių, kurias sudaro skaliaras, visi baziniaivektoriai, visos galimos bivektorių eiej , trivektorių eiejek ir t. t. sandaugos.
Jei erdvėje (ar jos poerdvyje) egzistuoja tiesiškai nepriklausomi vektoriaia, b, c, . . ., kurie nebūtinai yra vienas kitam ortogonalūs ar normuoti, tada visusgeometrinės algebros objektus galima užrašyti kaip menčių sumas. Pavyzdžiui,bet kokį bivektorių 〈A〉2 galima išreikšti dviejų vektorių išorinėmis sandaugomisa∧ b, b∧ c, c∧ a ir t. t., trivektorių 〈A〉3 — trijų vektorių sandaugomis a∧ b∧ cir t. t. Multivektorius užrašius kaip menčių sumas, formulėms prastinti galimapasinaudoti žemiau pateiktomis bendromis formulėmis.
Vektoriaus ir r mentės sandauga
Ar yra r rango mentė, a — vektorius
aAr = a · Ar + a ∧Ara · Ar = 1
2
ÄaAr − (−1)rAra
äa ∧Ar = 1
2
ÄaAr + (−1)rAra
äa · (ArI) = a ∧ ArIa ∧ (ArI) = a · ArI

Priedas 351
Vidinė ir išorinė menčių sandauga
Ar irBs yra r ir s rango mentės, λ — skaliaras
Ar · Bs = 〈ArBs〉|r−s| žemiausio rango mentė
Ar ∧Bs = 〈ArBs〉r+s aukščiausio rango mentė
Ar · λ = 0
Dviejų menčių sandaugos Clp,q algebroje, p+ q = n
Ar ir Bs yra mentės, λ — skaliaras
ArBs = 〈ArBs〉|r−s| + 〈ArBs〉|r−s|+2 + · · ·+ 〈ArBs〉r+sAr · (BsI) =Ar ∧BsI, kai r + s ≤ n
Ar ∧ (BsI) =Ar ·BsI, kai s ≤ n
Ar ·Bs = 〈ArBs〉|r−s|Ar · λ =0
Ar ∧Bs = 〈ArBs〉r+sAr ∧Bs = (−1)rsBs ∧ ArAr ∧ λ =Arλ
〈ArBs〉 = 〈BsAr〉
Trijų menčių sandaugos Clp,q algebroje, p+ q = n
Ar, Bs ir Ct yra mentės, a, b— vektoriai, λ — skaliaras
Ar · (Bs · Ct) = (Ar ∧ Bs) · Ct, kai r + s ≤ t
Ar · (Bs · Ct) = (Ar · Bs) ·Ct, kai r + t ≤ s
a ∧Ar ∧ b =−b ∧ Ar ∧ aa ∧ Ar ∧ a =0
a · (ArBs) = (a · Ar)Bs + (−1)rAr(a · Bs)a · (Ar ∧ Bs) = (a · Ar) ∧Bs + (−1)rAr ∧ (a · Bs)a ∧ (Ar · Bs) = (a · Ar) · Bs + (−1)rAr · (a ∧Bs)

352 13 skyrius
13.6. Kvaternionai
Svarbiausios kvaternionų q, p ir r savybės
Sc žymi skaliarinę, Vec — vektorinę kvaterniono dalį
i2 = j2 = k2 = −1 ijk = −1
q = q0 + iq1 + jq2 + kq3 q = q0 + q, q = iq1 + jq2 + kq3
q∗ = q0 − q |q|2 = q20 − q2 = q20 + q21 + q22 + q23q0 = Sc(q) = (q + q∗)/2 q = Vec(q) = (q − q∗)/2
q · p = −(qp+ pq)/2 = −Sc(qp) q × p = (qp− pq)/2 = Vec(qp)
Sc(qpr) = Sc(prq) = Sc(rqp) eqϕ = cosϕ+ q|q| sinϕ, −π ≤ ϕ ≤ π
qq∗ = q∗q = |q|2 q−1 = q∗/|q|2, q 6= 0
(q + p)∗ = q∗ + p∗ (qp)∗ = p∗q∗
(q∗)∗ = q |qp| = |q||p||q∗| = | − q| = |q| (qp)−1 = p−1q−1, qp 6= 0
13.7. ∇ savybės
Vektorinio diferencialinio operatoriaus ∇ savybės Clp,q algebroje, p+ q = n
x yra kintamas, a ir b — pastovūs vektoriai
∇ =∑nk=1 e
k ∂∂xk
∇(ArBs) = ∇ArBs + ∇ArBs Leibnitzo taisyklė
∇∧∇ = 0
∇x = n ∇(a ∧ x) = (1− n)a
∇x−1 = (n− 2)x−2 ∇(a · x) = a
∇x2 = 2x ∇(ax) = (2− n)a
∇xx = (2− n)x ∇(xa) = na
∇x3 = (2 + n)x2 ∇|x| = x
a · ∇x = a a · ∇|x| = a · xa · ∇x2 = 2a · x a · ∇(bx) = ba
∇ea·x = aea·x ∇e|x| = xe|x|/|x|∇eax = a n−2
|a∧x|ea·x sin |a ∧ x|

Priedas 353
13.8. Formulių prastinimas ir pertvarkymas
Prastinant ir pertvarkant geometrinės algebros formules galima vadovautistokiomis taisyklėmis:
1. Pirmiausia nustatome formulėje pasirodančių narių rangus. Dažnai įformules įeina, pavyzdžiui, skaliaras 〈M〉 ar bivektorius 〈M〉2. To-kiais atvejais galioja ciklinio daugiklių perstatymo taisyklė, leidžiantisukeisti daugiklių tvarką ir taip suprastinti formulę.
2. Kadangi skirtingorango nariai multivektoriujenesimaišo, skirtingųran-gų dalis galima prastinti nepriklausomai.
3. Verta pamėginti vidinę ir išorinę sandaugas užrašyti geometrinėmis san-daugomis. Taip perrašius galima pasinaudoti asociatyvumo savybe irtikėtis, kad dalis sumos narių susiprastins. Likę nariai gali duoti kito-kio pavidalo vidinę ir išorinę sandaugas.
4. Galima pridėti ar atimti vienodus narius. Prieš skliaustus iškėlus bend-rą daugiklį arba pergrupavus narius, likusiųjų narių vidinė ir išorinėsandaugos gali pasikeisti į paprastesnį pavidalą.
5. Į multivektorių galima įterpti vienetą, pavyzdžiui, 1 = ±I2, ir po topertvarkyti kairę ir/arba dešinę multivektoriaus puses. Pavyzdžiui, taipdaugybą iš pseudoskaliaro I vidinėje sandaugojegalima pakeisti išorinesandauga, arba atvirkščiai (žr. menčių sandaugų formules).
13.1 pavyzdys. Parodysime, kad −B ·(a ∧ (a · B)
)= (a · B)2 . Ir tikrai,
−B ·(a ∧ (a · B)
)daugiklis
(a∧(a ·B)
)yra bivektorius, todėl rezultatas yra
skaliaras
= B ·((a · B) ∧ a
)sukeitus a · B ir a vektorius keičiasi ženklas
= 〈B (aB) ∧ a〉0 vidinę sandaugą pakeičiam į geometrinę ir projektuojamį skaliarą
= 〈B(aB)a〉0 išorinę sandaugą keičiam į geometrinę, nes tik išorinė san-dauga projektoriuje duoda skaliarą
= 〈aBaB〉0 asociatyvumo savybė ir ciklinis perstatymas
= 〈(aB)(aB)〉0 asociatyvumo savybė
= 〈(aB)2〉0 aB =vektorius+trivektorius
= 〈(a · B)2〉0 nes skaliarinė dalis nepasikeičia
= (a · B)2 kadangi skaliarą projektuojam į skaliarą, projektoriaussimbolį praleidžiam
Šis pavyzdys rodo, kad iš anksto žinant atsakymo rangą, atitinkamo projektoriaus vidujegalima atlikti daugiau veiksmų nei bendro pavidalo multivektoriuje.

354 13 skyrius
13.2 pavyzdys. Reiškinį (a · b)2 − (a∧ b)2 suprastinsime vidinę ir išorinę sandaugaspakeitę geometrinėmis sandaugomis. Iš tiesų, perrašę matome, kad išraiška
(a · b)2 − (a ∧ b)2 =1
4
((ab+ ba)2 − (ab− ba)2
)
=1
4
((ab)2 + abba+ baab+ (ba)2 − (ab)2 + abba+ baab− (ba)2
)
=1
2(abba+ baab) =
1
2(a2b2 + a2b2) = a2b2 = (a · a)(b · b),
yra tiesiog vektorių modulių kvadratų sandauga.
13.3 pavyzdys. Parodysime, kad Cl1,3 algebroje multivektoriausγµψIγ3 ψ skaliarinėdalis lygi nuliui, jei multivektoriųψ sudaro tik lyginio rango nariai.
〈γµψIγ3ψ〉 skaliarinė dalis
= 〈γµIψγ3ψ〉 nes I komutuoja su lyginio rango elementais
= −〈Iγµψγ3ψ〉 nes I antikomutuoja su baziniais vektoriaisγµ= −〈Iγµw〉 kur w = ψγ3ψ yra keturmatis vektorius, nes
Cl1,3 rotoriusyra sudarytas tik iš lyginiorangoelementų
= −〈I(γµ ·w + γµ ∧ w)〉 γµw pakeičiam skaliaro ir bivektoriaus suma
= −〈I(γµ ·w)〉 − 〈I(γµ ∧ w)〉= 〈A4〉+ 〈B2〉 nes skliaustuose 〈. . . 〉 nepasirodo skaliaras:
pirmuose yra pseudoskaliaras A4, o antruose— bivektoriusB2
Kadangi naudojome tik bendrus geometrinės algebros veiksmus, šis pavyzdys rodo, kaipgalima sužinoti, iš kokio rango menčių susideda multivektorius γµψIγ3ψ. Tai, kad jįsudaro tik lyginio rango mentės, galima pamatyti ir iš to, kad I ir ψ rangai yra lyginiai,o γµ ir γ3 sandauga taip pat yra lyginio rango. Todėl lyginio rango menčių sandauga yralyginio rango multivektorius.
Jei turite kokį nors geometrinės algebros paketą, skaičiuojant verta išvestas formulespatikrinti įstačius konkrečius koeficientus. Pavyzdžiui, paėmę ψ = b0 + b1σ1 + b2σ2 +
b3σ3 + b4Iσ1 + b5Iσ2 + b6Iσ3 + biI ir γµ = γ0 ir įstatę į pradinę formulę γµψIγ3ψrandame, kad A4 = −2(b0b3 + b2b4 − b1b5 + b6bi)I ir B2 = 2(b1b3 − b0b5 + b4b6 +b2bi)Iσ1 + 2(b2b3 + b0b4 + b5b6 − b1bi)Iσ2 + (b20 − b21 − b22 + b23 − b24 − b25 + b26 +b2i )Iσ3 . Aišku, koordinatiniu pavidalu užrašytą formulę geometriškai interpretuoti yralabai sunku.

Priedas 355
13.9. Rekomenduojama literatūra
D. Hestenes monografija „New Foundations for Classical Mechanics“[12] yra įvadas į geometrinės algebros taikymą klasikinėjemechanikoje ir robotikoje. Pateikiama daug konkrečių geometrinėsalgebros taikymo pavyzdžių, kurie padeda nuosekliai pereiti nuostandartinio mechanikos dėstymo prie geometrinės algebrosformuluočių.
C. Dorano ir A. Lasenby knyga „Geometric Algebra for Physicists“[13] yra pagrindinis vadovas fizikams apie Cliffordo geometrinęalgebrą. Po trumpo įvado į geometrinę algebrą demonstruojami jostaikymai klasikinėje ir reliatyvistinėje mechanikoje, elektrodinamikojebei kvantinėje mechanikoje. Vėliau supažindinama su Lagrange’oformalizmu, o knygos pabaigoje nagrinėjami šiuolaikinės gravitacijosir kosmologijos klausimai.
J. A. Vince nedidelės apimties knyga „Geometric Algebra for Computer
Graphics“ [80] skirta pirmajai pažinčiai su geometrinės algebrostaikymu kompiuterinėje grafikoje. Joje smulkiai išnagrinėtiskaičiavimo pavyzdžiai 2D ir 3D euklidinėse erdvėse. Knyga taip patgali būti naudinga visiems, norintiems susipažinti su moderniaisskaičiavimais planimetrijoje ir stereometrijoje bei formuliųgeometrine interpretacija.
L. Dorsto ir kt. daugiau nei 600 puslapių knyga „Geometric Algebra
for Computer Science“ [60] skirta geometrinei algebrai bei rimtiemstaikymams kompiuterinėje grafikoje ir automatiniame valdyme(robotikoje). Daug vietos skiriama ortogonalioms transformacijoms irkonforminiam modeliui. Pateikti programavimo pavyzdžiai.
J. W. Arthur „Understanding Geometric Algebra for Electromagnetic
Theory“ [81]. Knyga skirta radijo inžinieriams. Joje nagrinėjama tiekklasikinė, tiek reliatyvistinė elektrodinamika. Daug vietos skirtapirmajai pažinčiai su geometrine algebra, deja, knygoje naudojaminetradiciniai multivektorių žymėjimai, pavyzdžiui,x, xy, . . . vietojeįprastų e1, e12, . . . Knygos iniciatorius ir sponsorius IEEE Antenna
Propagation Society (JAV).

356 13 skyrius
W. E. Baylis knygoje „Electrodynamics: A Modern Geometric
Approach“ [9] naudojamas netradicinis elektrodinamikos dėstymaspasitelkiant geometrinės algebros paravektorius (skaliaras+vektorius).Naudojant Cl3,0 algebrą ir taikant ribotą Lorentzo transformacijąaptariama klasikinė ir kovariantinė elektrodinamika.
J. Snygg knygoje „Clifford Algebra (A Computational Tool for
Physicists)“ [47] aptarti geometrinės algebros taikymai reliatyvumoteorijoje ir kosmologijoje. Panašūs klausimai aptariami irP. R. Girard knygoje „Quaternions, Clifford Algebras and Relativistic
Physics“ [32].
A. Macdonald’o du puikūs vadovėliai „Linear and Geometric
Algebra“ ir „Vector and Geometric Calculus“ [16, 82] pateikiaišsamius geometrinės algebros ir analizės matematinius pagrindus.Abu vadovėliai gausiai iliustruoti pavyzdžiais ir užduočių sprendimais.
D. Hestenes, G. Sobczyk „Clifford Algebra to Geometric Calculus“[5] ir K. Gürlebeck, Sprössing „Quaternionic and Clifford Calculus
for Physicists and Engineers“ [7] knygos skirtos jau susipažinusiam sugeometrine algebra skaitytojui. Kaip sako pavadinimai, jos išsamiaiaptaria integralinį ir diferencialinį skaičiavimą.
D. J. H. Garling „Clifford Algebras: An Introduction“ [83] nedidelėsapimties (200 psl.) vadovėlis skirtas matematikos specialybėsstudentams. Jis bus naudingas ir būsimiems fizikams-teoretikams.
P. Lounesto „Clifford Algebras and Spinors“ [8] yra dažnai cituojama,giliomis įžvalgomis pasižyminti knyga. Ji nėra perkrauta abstrakčiaisišvedimais, aprėpia daug fizikams svarbių temų, tačiau naudingiausiabus jau geometrinės algebros pradmenis įsisavinusiam skaitytojui.
J. Snygg knygoje „A New Approach to Differential Geometry Using
Clifford’s Geometric Algebra“ [84] geometrinės algebros kalbasuprantamai ir įdomiai formuluojami kreivų erdvių bei paviršiųaprašymo klausimai. Aptariama nekoordinatinė bazė ir įvedamavidinės išvestinės koncepcija. Skyrių pabaigose pateikiami labaiįdomūs istoriniai intarpai.

Žymenys
Skaičių aibės:
R realiųjų skaičių aibėC kompleksinių skaičių aibėH kvaternioninių skaičių aibėO oktanioninių skaičių aibėZ sveikųjų skaičių aibė
Erdvės:
V, U vektorinė erdvėV (p, q) vektorinė erdvė, kurios metrika (p, q)Gn n-matė geometrinės algebros erdvėgµν metrinis tenzorius
Geometrinės algebros:
Clp,q geometrinė algebra kurios metrika (p, q)Cl3,0 3D Euklido erdvės algebraCl1,3 Minkowskio erdvėlaikio algebraCl± lyginė/nelyginė algebraA,B konkrečiai neįvardyta algebra
Skaliarai, pseudoskaliarai:
α, β, λ graikiškos raidės žymi skaliarus〈A〉 multivektoriaus A skaliarinė dalis
IClp,q algebros vienetinis pseudoskaliaras.Pavyzdžiui, Cl3,0 algebroje I = σ1σ2σ3, o Cl1,3 algebrojeI = γ0γ1γ2γ3
Ir r-ojo rango poerdvio pseudoskaliaras
357

358
Vektoriai:
a, b,x 2D arba 3D erdvėsea, b, x bendrieji vektoriaia, a vienetinis vektoriusei bazinių vektorių ei aibėei atvirkštinės erdvės bazinių vektorių aibėσi Cl3,0 algebros baziniai vektoriaiγi Cl1,3 algebros baziniai vektoriai
Bivektoriai:
eiej, eij baziniai bivektoriaiσij, Iσi Cl3,0 algebros baziniai bivektoriaiγij Cl1,3 algebros baziniai bivektoriaiσk Cl1,3 algebros laikiškasis bivektorius γkγ0Iσk Cl1,3 algebros erdviškasis bivektorius γiγj, i 6= j 6= 0A,B bendrieji bivektoriaiB vienetinis bivektorius〈M〉2 multivektoriaus bivektorinė dalis arba projektorius
Trivektoriai:
eiejek baziniai trivektoriaieijk baziniai trivektoriaiT bendrasis trivektoriusIγi Cl1,3 algebros baziniai trivektoriai〈M〉3 multivektoriaus trivektorinė dalis arba projektorius
Multivektoriai ir jų dalys:
A,B,M bendrieji multivektoriai〈A〉, 〈A〉0 multivektoriaus skaliarinė dalis〈A〉1 multivektoriaus vektorinė dalis〈A〉2 multivektoriaus bivektorinė dalis〈A〉r multivektoriaus r-ojo rango dalis arba r-asis projektoriusAr r mentė

Žymenys 359
Sandaugos:
a b vektorių a ir b geometrinė sandaugaAB multivektorių A ir B geometrinė sandaugaA ∧ B išorinė (pleištinė) sandaugaA · B vidinė (taškinė) sandaugaDC∧A·B Sandaugų prioritetai: vidinė→ išorinė→ geometrinė,
D(C∧ (A · B))A× B komutatorius, geometrinėje algebrojeA ∗ B multivektorių skaliarinė sandaugaa b skaliarinė sandauga, vektoriniame skaičiavimea× b vektorinė sandauga, vektoriniame skaičiavime
Norma, atvirkštinis, involiucijos ir pan.
|A| multivektoriaus A norma (magnitudė)|a|, |A| vektoriaus ir bivektoriaus normaA−1 atvirkštinis multivektoriusA apgrąža (reversija)ÛA rango inversijaA kompleksinis sujungtinumasÛA Cliffordo involiucija⋆A dualusis multivektorius, ⋆A = AI−1
Nabla operatorius
∇ vektorinė išvestinė 3D erdvėje: ∇ = σ1∂1 + σ2∂2 + σ3∂3∇ vektorinė išvestinė n-matėje erdvėje∇a išvestinė pagal vektorių aa · ∇ skaliarinė išvestinė, diferencialas∇ · A multivektoriaus divergencija∇∧ A multivektoriaus rotorius
Kompleksiniai skaičiai ir kvaternionai:
i, i tradicinis menamasis vienetas, i =√−1
i, j, k kvaternioniniai menamieji vienetaiz kompleksinis skaičius, z = α+ iβ, z∗ = α− iβq kvaternionas, q = q0 + iq1 + jq2 + kq3 = [q0, q]q∗ kompleksiškai jungtinis kvaternionas, q∗ = [q0,−q]

360
Varia:
σi i-oji Paulio matricaγi i-oji Diraco matricaA ∼= B A yra izomorfiška Bx ∈ A . . . x yra A elementas . . .2 pavyzdžio pabaiga

361

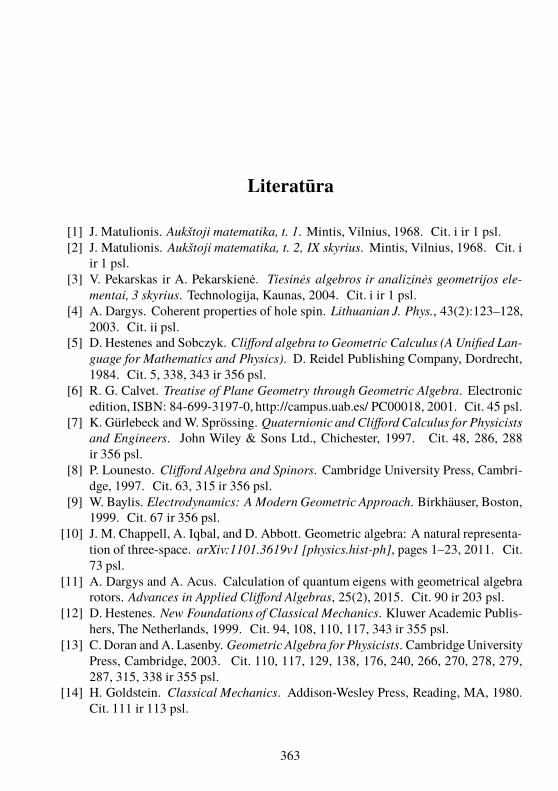
Literatūra
[1] J. Matulionis. Aukštoji matematika, t. 1. Mintis, Vilnius, 1968. Cit. i ir 1 psl.[2] J. Matulionis. Aukštoji matematika, t. 2, IX skyrius. Mintis, Vilnius, 1968. Cit. i
ir 1 psl.[3] V. Pekarskas ir A. Pekarskienė. Tiesinės algebros ir analizinės geometrijos ele-
mentai, 3 skyrius. Technologija, Kaunas, 2004. Cit. i ir 1 psl.[4] A. Dargys. Coherent properties of hole spin. Lithuanian J. Phys., 43(2):123–128,
2003. Cit. ii psl.[5] D. Hestenes and Sobczyk. Clifford algebra to Geometric Calculus (A Unified Lan-
guage for Mathematics and Physics). D. Reidel Publishing Company, Dordrecht,1984. Cit. 5, 338, 343 ir 356 psl.
[6] R. G. Calvet. Treatise of Plane Geometry through Geometric Algebra. Electronicedition, ISBN: 84-699-3197-0, http://campus.uab.es/ PC00018, 2001. Cit. 45 psl.
[7] K. Gürlebeck and W. Sprössing. Quaternionic and Clifford Calculus for Physicists
and Engineers. John Wiley & Sons Ltd., Chichester, 1997. Cit. 48, 286, 288ir 356 psl.
[8] P. Lounesto. Clifford Algebra and Spinors. Cambridge University Press, Cambri-dge, 1997. Cit. 63, 315 ir 356 psl.
[9] W. Baylis. Electrodynamics: A Modern Geometric Approach. Birkhäuser, Boston,1999. Cit. 67 ir 356 psl.
[10] J. M. Chappell, A. Iqbal, and D. Abbott. Geometric algebra: A natural representa-tion of three-space. arXiv:1101.3619v1 [physics.hist-ph], pages 1–23, 2011. Cit.73 psl.
[11] A. Dargys and A. Acus. Calculation of quantum eigens with geometrical algebrarotors. Advances in Applied Clifford Algebras, 25(2), 2015. Cit. 90 ir 203 psl.
[12] D. Hestenes. New Foundations of Classical Mechanics. Kluwer Academic Publis-hers, The Netherlands, 1999. Cit. 94, 108, 110, 117, 343 ir 355 psl.
[13] C. Doran and A. Lasenby. Geometric Algebra for Physicists. Cambridge UniversityPress, Cambridge, 2003. Cit. 110, 117, 129, 138, 176, 240, 266, 270, 278, 279,287, 315, 338 ir 355 psl.
[14] H. Goldstein. Classical Mechanics. Addison-Wesley Press, Reading, MA, 1980.Cit. 111 ir 113 psl.
363

364
[15] A. Dargys. Analysis of electron spin in semiconductors using geometric algebra.Physica Scripta, 79(5):055702–1–6, 2009. Cit. 117 ir 203 psl.
[16] A. Macdonald. Vector and Geometric Calculus. Luther College, San Bernardino,CA, 2012. Cit. 119, 129, 133 ir 356 psl.
[17] K. Gürlebeck, K. Habetha, and W. Sprössing. Holomorphic Functions in the Plane
and n-dimensional Space. Birkhäuser, Basel, 2008. Cit. 119 ir 339 psl.[18] V. Kybartas ir V. Šugurovas. Elektrodinamika. Mokslas, Vilnius, 1977. Cit. 149
ir 168 psl.[19] A. Matulis. Elektrodinamika. UAB Ciklonas, Vilnius, 2001. Cit. 149 psl.[20] C. N. Yang. The conceptual originsof Maxwell’s equations and gauge theory. Phys.
Today, 67(11):45–51, 2014. Cit. 154 psl.[21] T. G. Mackay and A. Lakhtakia. Electromagnetic Anisotropy and Bianisotropy: A
Field Guide. World Scientific Publishing, Singapore, 2010. Cit. 154 psl.[22] F. W. Hehl and Y. N. Obukhov. Foundationsof Classical Electrodynamics: Charge,
Flux and Metric. Birkhäuser, Boston, 2003. Cit. 154 psl.[23] F. W. Hehl and Y. N Obukhov. Linear media in classical electrodynamics and the
Post constraint. arXiv:physics/0411038v1, [physics.class-ph]:1–15, 2004. Cit.154 psl.
[24] B. Jancewicz. Multivectors and Clifford Algebra in Electrodynamics. World Sci-entific, Singapore, 1988. Cit. 156 ir 168 psl.
[25] T. G. Vold. An introduction to geometric algebra with an application in rigid bodymechanics. Am. J. Phys., 61(6):491–504, 1993. Cit. 158 ir 311 psl.
[26] T. G. Vold. An introduction to geometric calculus and its application to electrody-namics. Am. J. Phys., 61(6):505–513, 1993. Cit. 158 psl.
[27] A. Dargys. Optical Mueller matrices in terms of geometric algebra. Opt. Commun.,285:4785–4792, 2012. Cit. 166 ir 203 psl.
[28] D. Hestenes. Space-Time Algebra. Gordon and Breach, New York, 1966. Cit. 175ir 343 psl.
[29] E. H. Gombrich. Meno istorija. Alma littera, Vilnius, 2014. Cit. 178 psl.[30] A. Dargys ir A. Acus. Dviejų ir trijų lygmenų atomai ir sistemos kvantinėje me-
chanikoje. Petro ofsetas, Vilnius, 2011. Cit. 178, 185, 198, 199 ir 212 psl.[31] S. L. Adler. Quaternionic Quantum Mechanics and Quantum Fields. Oxford Uni-
versity Press, New York, 1995. Cit. 181 psl.[32] P. R. Girard. Quaternions, Clifford Algebras and Relativistic Physics. Birkhäuser
Verlag AG, Basel, 2007. Cit. 181, 240 ir 356 psl.[33] A. Dargys. Double reflection of electron spin in semiconductors. Acta Phys. Pol.
A, 119(2):161–163, 2011. Cit. 185 psl.[34] D. Hestenes. Oersted medal lecture 2002: Reforming the mathematical language
of physics. Am. J. Phys., 71(2):104–121, 2003. Cit. 196 psl.[35] R. Gurtler and D. Hestenes. Consistency in the formulation of the Dirac, Pauli, and
Schrödinger theories. J. Math. Phys., 16(3):573–584, 1975. Cit. 196 psl.

365
[36] C. Doran, A. Lasenby, and S. Gull. States and operators in the spacetime algebra.Found. Phys., 23(9):1239, 1993. Cit. 196 psl.
[37] V. Karpus. Dvimačiai elektronai. Virtuali leidykla-knygynas, Vilnius, 2004. Cit.199 psl.
[38] A. Dargys. Double reflection of electron spin in 2D semiconductors. Superlattices
and Microstructures, 48(2):221–229, 2010. Cit. 203 psl.[39] A. Dargys. Quantum ring in the eyes of geometric (Clifford) algebra. Physica E,
47(1):47–50, 2013. Cit. 203 psl.[40] A. Dargys. Spin and pseudospin in monolayer graphene: I. representation by geo-
metric algebra and simple cases. Physica Scripta, 90(2):025807–1–10, 2015. Cit.203 psl.
[41] A. Dargys and A. Acus. Pseudospin, velocityand Berry phase in a bilayer graphene.arXiv, 1410.2038v1(cond-mat.mes-hall):1–18, 2014. Cit. 203 psl.
[42] K. Pyragas ir A. Lozdienė. Specialioji reliatyvumo teorija. Baltic ECO, Vilnius,1996. Cit. 205 ir 233 psl.
[43] R. Gilmore. Lie Groups, Lie Algebras and Some of their Applications. John Wileyand Sons, New York, 1974. Cit. 217 psl.
[44] L. D. Landau i E. M. Lifxic. Teori pol. Nauka, Moskva, 1973.Cit. 233 psl.
[45] G. B Malykin. Precessi Tomasa: korrektnye i nekorrektnye res-heni. Uspehi Fiziqeskih Nauk, 176(8):865–882, 2006. Cit. 240 psl.
[46] W. Zawadzki and T. M. Rusin. Zitterbewegung (trembling motion) of electrons insemiconductors: a review. J. Phys.: Condens. Matter, 23(14):143201–1–19, 2011.Cit. 240 psl.
[47] J. Snygg. Clifford Algebra (A Computational Tool for Physicists). Oxford Univer-sity Press, NewYork, Oxford, 1997. Cit. 240, 315 ir 356 psl.
[48] M. R. Francis and A. Kosowsky. Geometric algebra techniques for general relati-vity. arXiv:gr-qc/0311007v1, pages 1–34, 2003. Cit. 240 psl.
[49] F. Hasselbach. Progress in electron- and ion-interferometry. Rep. Progr. Phys., 73(1):016101–1–43, 2010. Cit. 248 psl.
[50] J. D. Jackson. Classical Electrodynamics. John Wiley & Sons, New York, 1962.Cit. 264 psl.
[51] D. Hestenes. Real spinor fields. J. Math. Phys., 8(4):798–808, 1967. Cit. 273ir 285 psl.
[52] S. F. Gull. Charged particles at potential steps. In D. Hestenes and A. Weingart-shofer, editors, The Electron, pages 37–48. Kluwer Academic, Dordrecht, 1991.Cit. 274 psl.
[53] P. A. M. Dirac. The Principles of Quantum Mechanics. Clarendon Press, Oxford,1958. Cit. 275 psl.
[54] J. M. Bjorken and S. D. Drell. Relativistic quantum mechanics. McCraw-Hill, NewYork, 1964. Cit. 275 ir 279 psl.
366
[55] S. Gull, A. Lasenby, and C. Doran. Electron paths, tunnelling and difraction in thespacetime algebra. Found. Phys., 23(10):1329, 1993. Cit. 287 psl.
[56] D. M. Greenberger. The neutron interferometer as a device for illustrating thestrange behavior of quantum systems. Rev. Mod. Phys., 55(4):875–905, 1983. Cit.287 psl.
[57] D. Hestenes. Spacetime physics with geometric algebra. Am. J. Phys., 71(7):691–714, 2003. Cit. 287 psl.
[58] B. Mawardi and E. C. M. Hitzer. Uncertainty principle for the Clifford geometricalgebra Cl3,0 based on Clifford Fourier transform. Advances in Applied Clifford
Algebras, 2005. Cit. 288 psl.[59] H. De Bie and F. Sommen. Vector and bivector Fourier transforms in Clifford
analysis. In K. Gürlebeck and C. Könke, editors, 18-th Int. Conf. Appl. Comp. Sci.
and Math.in Architecture and Civil Engineering. Universiteit Gent, 2009. Cit. 288ir 336 psl.
[60] L. Dorst, D. Fontijne, and S. Mann. Geometric Algebra for Computer Science.Elsevier, Amsterdam, 2007. Cit. 305, 315, 317, 320 ir 355 psl.
[61] G. Aragon-Gonzalez, J. L. Aragon, M. A. Rodriguez-Andrade, and L. Verde-Star.Reflections, rotations, and pythagorean numbers. Advances in Applied Clifford
Algebras, 19(1):1–14, 2009. Cit. 305 psl.[62] G. S. Staples and D. Wylie. Clifford algebra decompositions of conformal ortho-
gonal transformations. Advances in Applied Clifford Algebras, (In press), 2015.Cit. 305 psl.
[63] D. Fontijne. Efficient Implementation of Geometric Algebra. BOX Press, Univer-siteit van Amsterdam, 2007. Cit. 305 psl.
[64] V. V. Varlamov. Universal coverings of orthogonal groups. Advances in Applied
Clifford Algebras, 14(1):81–168, 2004. Cit. 306 psl.[65] E. Chisolm. Geometric algebra. arXiv:1205.5935v1 [math-ph], pages 1–92, 2012.
Cit. 310, 317 ir 320 psl.[66] R. E. Harke. An introductionto the mathematics of the space-time algebra. Internet,
1998. Cit. 312, 315 ir 316 psl.[67] G. Casanova. L’algebre Vectorielle. Presses Universitaire de France, Paris, 1976.
(G. Kazanova ”Vektorna algebra”, Mir, Moskva (1979)). Cit.315 psl.
[68] V. V. Fernandez, A. M. Moya, and W. A. Rodrigues Jr. Multivector and extensorcalculus. Advances in Applied Clifford Algebras, 11(3):1–103, 2001. Cit. 316 psl.
[69] Michel Rausch de Traubenberg. Clifford algebras in physics. Advances in Applied
Clifford Algebras, 19:869–908, 2009. Cit. 322 ir 324 psl.[70] I. Todorov. Clifford algebras and spinors. Bulg. J. Phys., 38(3), 2011. Cit. 326 psl.[71] A. LeClair and D. Bernard. Holographic classification of topological insulators
and its 8-fold periodicity. arXiv:, 1205.3810v1([cond-mat.str-el]):1–20, 2012. Cit.327 psl.

367
[72] L. M. Krauss. Visata iš nieko — kitoks požiūris į visatos atsiradimą. Alma littera,Vilnius, 2013. Cit. 330 psl.
[73] E. Hitzer. Basic multivector calculus. Proc FAN, Hiroshima, Japan, 2008. Cit.338 psl.
[74] E. M. S. Hitzer. Vector differential calculus. Mem. Fac. Eng. Fukui Univ., 50(1),2002. Cit. 338 psl.
[75] E. M. S. Hitzer. Multivector differential calculus. Advances in Applied Clifford
Algebras, 12(2):135–182, 2002. Cit. 338 psl.[76] E. Artin. Geometric algebra. Interscience tracts in pure and applied mathematics.
Interscience Publishers, 1957. Cit. 343 psl.[77] I. R. Porteous. Topological Geometry. Cambridge University Press, 1981. ISBN
9780521298391. Cit. 343 psl.[78] I. R. Porteous. Clifford Algebras and the Classical Groups. Cambridge University
Press, Cambridge, 2009. Cit. 343 psl.[79] A. Eddington. Relativity Theory Of Protons And Electrons. Interscience Tracts in
Pure & Appl. Math. Cambridge University Press, 1936. Cit. 344 psl.[80] J. A. Vince. Geometric Algebra for Computer Graphics. Springer-Verlag, London,
2008. Cit. 344 ir 355 psl.[81] J. W. Arthur. Understanding Geometric Algebra for Electromagnetic Theory. Wi-
ley and Sons, New Jersey, 2011. Cit. 355 psl.[82] A. Macdonald. Linear and Geometric Algebra. Luther College, San Bernardino,
CA, 2010. Cit. 356 psl.[83] D. J. H. Garling. Clifford Algebras: An Introduction. Cambridge University Press,
Cambridge, 2011. Cit. 356 psl.[84] J. Snygg. A New Approach to Differential Geometry Using Clifford’s Geometrical
Algebra. Springer, NewYork, 2012. Cit. 356 psl.


369
Rodyklė
Aaksialinis vektorius, 62algebra, 20
antieuklidinė, 300diferencialinių formų, 21,
342erdvėlaikio, 205euklidinė, 300kvaternionų, 30, 47, 49oktonionų, 30paprasta, 326reliatyvistinė, 215struktūrinis tipas, 300su dalyba, 30, 304
algebros centras, 66, 326Ampere’o dėsnis, 151, 154antiautomorfizmas, 306antidalelė, 273, 285, 291, 306antikomutacija, 12, 175antisimetrizacija, 308apgrąža, 209, 282, 305, 313
laiko, 306asociatyvumas, 16, 20, 22, 30ašis
kvantavimo, 178, 179, 188,281, 282
atspindys, 304bivektoriaus, 84erdvinis, 276kombinuotas, 43pseudoskaliaro, 84vektoriaus, 43, 80
atspindžio koeficientas, 172,173
atvaizdisimpulsinis, 288
atvirkštinis multivektorius, 72aukštesnio rango taisyklė, 319automorfizmas, 85, 306
Bbanga
apskritimiškai poliarizuota,161
atsispindėjusi, 294bėganti, 153, 158, 288bėganti elektromagnetinė,
259cilindrinė, 159plokščia, 158praėjusi, 294tiesiškai poliarizuota, 163
bangos skaičius, 160bangos vektorius, 158, 199bazė, 206
atvirkštinė, 135bivektorinė, 26duali, 136, 142erdvės, 25ortonormuota, 136, 299vaizdavimas matricomis, 56vektorinė, 25
bazėsdualios, 135
bemetrinė elektrodinamika,155
bėganti bangaelektromagnetinė, 158, 259elektrono, 288, 294
bikvaternionas, 53bivektoriaus sukimas, 85bivektorius, 59, 217, 218
atvirkštinis, 12, 73erdviškasis, 207, 214Faraday’aus, 230laikiškasis, 207, 213magnetinės indukcijos, 154sukimosi greičio, 253tikrinis, 89žymėjimas, 358
Bloch F., 189Blocho sfera, 189, 194
Bourbaki N., 82Brewsterio kampas, 174būsena
dalelė-antidalelė, 279superpozicijos, 179, 201
CCartan É.J., 16, 82Cauchy-Riemanno sąlyga,
119, 339centras, 326ciklinis perstatymas, 65, 184,
313Clifford W.K., 11, 16, 22, 341Cliffordo involiucija, 28, 305Comptono ilgis, 262Comptono sklaida, 262Coulombo dėsnis, 263Coulombo formulė, 263
Ddarbas, 105daugdara, 145, 328
jos kraštas, 328daugyba
multivektorių, 37daugybos lentelė
Cl0,2, 48Cl1,1, 54Cl2,0, 36Cl3,0, 60Cl+3,0, 71kvaternionų, 48
dažnisciklotroninis, 101kampinis, 103, 116precesijos, 192
de Broglie L., 262dekompozicija, 336del Ferro, 57Descartes R., 178determinantas, 38, 64dėsnis
antrasis Newtono, 99Coulombo, 263Hooke’o, 99

370
impulso tvermės, 262krūvio tvermės, 245pirmasis Newtono, 99Snellio, 170
dydis, 34Dieudonné J., 82diferencialas, 339diferencialinė lygtis
multivektorinė, 102diferencialinis operatorius
Cl0,2 algebros, 49kvaternioninis, 49
dinamika, 98dipolis, 271Dirac P.A.M., 175, 273, 283Diraco lygtis, 283
Cl1,3 algebroje, 285standartinėje formoje, 284
Diraco matricos, 206Diraco-Hestenes lygtis, 283diskretinė simetrija, 307dispersijos dėsnis
reliatyvistinės dalelės, 290šviesos, 233, 259
distributyvumas, 16, 20, 22,311
divergencija, 121, 125, 340apibendrinta, 337, 338
Doplerio reiškinys, 228draustinė juosta, 292dualumas, 66, 149, 302
Hodge’o, 63dualus multivektorius, 302dvimentė, 32
EEinstein A., 205ekscentricitetas, 94, 109, 112eksponentė
bivektoriaus, 76, 237erdviškojo, 209laikiškojo, 208
multivektoriaus, 76vektoriaus, 76
elektrinė indukcija, 150
elektrinė skverbtis, 154elektrinis laukas, 230
Cl1,3 algebroje, 244judančiam stebėtojui, 251
elektronaspoliarizuotas, 190reliatyvistinis, 284
elektrovaros jėga, 150energija, 232
kinetinė, 105, 115reliatyvistinė, 283tikrinė, 186vidutinė, 186
energijos tankis, 165energijų spektras, 200erdvė
Cliffordo, 22Euklido, 11, 211Grassmanno, 22jos perklojimas, 25kreiva, 138, 330liestinė, 143Minkowskio, 9neigiamos metrikos, 48plokščia, 138, 330žymėjimas, 357vektorinė, 19
erdvėlaikio perskėlimas, 229,231, 241, 242, 246
erdvėlaikio sujungtinumas,209
erdvėlaikis, 54, 205erdvės dimensija, 300erdvės lygiškumas, 85erdvinė inversija, 209, 230,
306erdvinis kvantavimas, 199eteris, 205Euler L., 57Eulerio formulė, 112Eulerio lygtis, 115
Ffaktorizacijos uždavinys
multivektoriaus, 305
Faraday M., 154Faraday’aus bivektorius, 230Faraday’aus dėsnis, 150Faraday’aus laukas, 154, 230,
243, 266matricinis pavidalas, 244
fazė, 159Fermio energija, 200Fermio pernaša, 237fermionas, 288Fitzgerald G., 205Fizeau A., 149formulė
Coulombo, 263Dopplerio, 229jos prastinimas, 353Snellio, 170
fotonas, 233, 262, 290Fresnelio formulės, 172Fresnelio lygtys, 170funkcija
analizinė, 119, 339bivektorinė, 89Greeno, 338hamiltoninė, 185hiperbolinė, 54hiperkompleksinė, 119holomorfinė, 119, 339monogeninė, 339, 340multivektoriaus, 26, 75, 338tiesinė, 26vektorinė, 27
Ggalia, 255garsiosios formulės, 314, 315Gausso dėsnis
elektros krūviui, 151monopoliui, 152
Gausso teorema, 331, 332generatorius
kvaternioninis, 53geometrinė algebra, 2, 11
Cl0,1, 56Cl0,2, 47

371
Cl0,7 , 323Cl1,1 , 54Cl1,3 , 346Cl2,0 , 35Cl3,0 , 59, 345Cl4,0 , 303, 305Clp,q , 299kompleksifikuota, 307literatūra, 355
geometrinė sandaugamenčių, 310multivektorių, 309vektorių, 348
Gibbs J.W., 16, 149giromagnetinė pastovioji, 190giromagnetinis santykis, 190gradientas, 121, 337grafenas, 291, 296Grassmann H.G., 16, 21Greeno funkcija, 245greičio operatorius, 201greičių sudėtis, 227greitis, 1, 96, 98, 115
kampinis, 61, 104keturmatis, 223, 289reliatyvusis, 225, 250savasis, 222, 223, 235, 250šviesos, 212, 235
grupėSpin(p, q), 274Lie, 217Lorentzo, 217
HHaidingerio šepetėlis, 174Hamilton W.R., 16, 47, 127hamiltonianas
dviejų lygmenų, 185, 199Heaviside O., 16, 149Hestenes D., 16, 108, 175, 273,
317hiperplokštuma, 2Hodge’o dualumas, 63Hodge’o žvaigždutė, 302holograma, 119
holomorfiškumas, 339
Iidempotentas, 261ilgis
savasis, 234impedansas, 171impulsas, 115
keturmatis, 232impulsinis atvaizdis, 288impulso operatorius, 196, 287indeksai
kanoninė tvarka, 33, 64pavidalai, 33žymėjimas, 211
inercijos momentas, 117integralas
antros rūšies, 130, 145bivektorinis, 133išilgai kreivės, 130, 131judėjimo, 107, 109, 112,
118pirmos rūšies, 130srauto, 331
integravimasorientuotas, 130pagal parametrą, 97
intervalas, 211šviesiškasis, 212
invariantaiCl1,3 algebros, 279elektrodinamikos, 247Keplerio, 110reliatyvistiniai, 247
invariantas, 221, 251judesio kiekio momento,
111invariantinis intervalas, 54
jo perskėlimas, 231invariantinis skaidinys, 218invariantiškumas, 158, 278
kalibruotės, 248, 285laike, 232transliacijoms, 232
inversija, 28
erdvinė, 209, 230, 246, 306involiucija, 305
apgrąžos, 154, 305Cliffordo, 305rango inversijos, 305
involiucijos, 306išorinė sandauga, 308
vektorių, 6, 348išsigimęs sprendinys, 291išsigimimas, 200išvestinė
bekoordinatinis apibrėži-mas, 341
bivektorinio lauko, 125dalinė, 129daugiamatėje erdvėje, 340kompleksinės funkcijos,
128kryptinė, 128, 335, 339multivektorinio lauko, 126multivektorių sandaugos,97pagal parametrą, 96, 97pseudoskaliarinio lauko,
126skaliarinė, 339skaliarinio lauko, 122vektorinė, 143, 333vektorinio lauko, 124
izomorfiškumas, 49, 322Cliffordo algebrų, 322
Įįdėtis, 138, 330įmerktis, 330įvykis
reliatyvistinis, 210, 211
JJacobio tapatybė, 92, 93jėga, 115
gravitacinė, 99konservatyvi, 105, 107Lorentzo, 99, 101, 152oro pasipriešinimo, 100
jėgos momentas, 117judantis krūvis, 267, 269

372
judesio kiekio momentas, 24,107, 115, 118
judesio kiekis, 107judėjimo integralas, 118
Kkalibruotė, 248, 285
Lorentzo, 297kalibruotės teorija, 249kampas, 16, 115
Brewsterio, 174Eulerio, 112, 114orientuotas, 61sklaidos, 111stūmio, 226
kampinis greitis, 61, 115kampinis pagreitis, 115keitimo taisyklės
Cl1,3 algebros, 277kelias, 115Keplerio
dėsniai, 108invariantai, 110uždavinys, 94
keturmatis potencialas, 248keturvektorius, 3kinematika, 98kinetinė energija, 115Kleino butelis, 140, 330Kleino-Gordono lygtis, 296koeficientas
atspindžio, 172, 173pralaidumo, 172, 173
kompleksifikacijakvaternionų, 53
kompleksinis sujungtinumas,307
kompozicijaatspindžių, 43
komutaciniai sąryšiai, 176komutatyvumas, 20, 22, 30komutatorius, 316kondensatorius, 271konforminė geometrija, 11konstanta
gravitacinė, 108stangrumo, 106
konstituciniai sąryšiai, 167kontravariantinis dydis, 278koordinačių sistema, 178
sferinė, 340koordinatės, 178
kreivalinijinės, 139kosmologija, 195kovariantinis dydis, 278kraštinės sąlygos, 167
elektriniam laukui, 167Faraday’aus laukui, 168magnetiniam laukui, 168
kryptinė išvestinė, 129Kroneckerio delta, 35
apibendrinta, 136krūvio sujungtinumas, 308krūvis
magnetinis, 245paviršinis, 167
kvadratasmultivektoriaus, 75
kvadratinė forma, 307kvadratinė šaknis
iš −1, 287iš bivektoriaus, 77iš Laplace’o operatoriaus,
127iš multivektoriaus, 76iš trivektoriaus, 76
kvantavimo ašis, 178, 179, 188kvantavimo plokštuma, 281kvantinė elektrodinamika, 288kvantinis šulinys, 199kvaternionai, 11, 49
baziniai, 49daugybos lentelė, 48
kvaternionas, 30, 114, 181,352
atvirkštinis, 51jo norma, 51kompleksiškai jungtinis, 51matricinis vaizdavimas, 52nulinis, 50
skaliarinė dalis, 50vektorinė dalis, 50vienetinis, 51
kūginiai pjūviai, 94kūgis, 213
Llaikas, 210
savasis, 222laiko apgrąža, 306laiko sulėtėjimas, 235Laplace’o operatorius, 126Larmor J., 205laukai
multivektoriniai, 338pseudoskaliariniai, 278, 297skaliariniai, 278, 297, 336vektoriniai, 337
laukas, 20bivektorinis, 120, 125Coulombo elektrostatinis,
132elektrinis, 230, 244, 249elektromagnetinis, 154Faraday’aus, 230, 266gravitacinis, 100, 132jo projekcija, 278konservatyvusis, 132magnetinis, 120, 230, 244,
249papildantis, 265skaliarinis, 120spinorinis, 120šmėklinis, 265trivektorinis, 126vektorinis, 120, 122, 125
lentelėaštuonlypė algebrų, 325,
326Lie algebra, 317lygiagretumas
vektorių, 6lygiškumas, 29lygtis
apskritimo, 94

373
charakteringoji, 106Diraco, 283, 285Diraco-Hestenes, 283dispersijos, 160elipsės, 94Eulerio, 115hiperbolės, 94homogeninė, 89judėjimo
rotoriaus, 104Kleino-Gordono, 296monogeninė, 285Newtono, 115parabolės, 94plokštumos, 93precesijos, 195rotoriaus, 116Schrödingerio-Paulio, 192,
194, 287sferos, 94tiesės, 91
lygtysEM bangos sklidimo, 157Fresnelio, 170kvantinės mechanikos, 297Maxwello, 1medžiagos, 167Proca, 297tiesinės, 26
linijapasaulinė, 213
Lorentz H., 205Lorentzo daugiklis, 227, 233,
234Lorentzo grupė, 217Lorentzo jėga, 152
Cl1,3 algebroje, 254Cl3,0 algebroje, 252
Lorentzo kalibruotė, 266, 297Lorentzo rotorius, 217, 218,
235Lorentzo sąlyga, 248Lorentzo stūmis, 55Lorentzo transformacija, 207,
214, 233
lūžio rodiklis, 171
MMöbiuso juosta, 146Möbiuso juosta, 330magnetinė indukcija, 150magnetinė skverbtis, 154magnetinis krūvis, 245magnetinis laukas, 1, 230
Cl1,3 algebroje, 244judančiam stebėtojui, 251
magnetinis momentas, 190magnitudė, 34, 40Maple, 50masės centras, 115Mathematica, 50matrica
Diraco, 278, 284sukimo, 44
matricinis elementas, 183matricos
Diraco, 206Paulio, 8, 53
Maxwell J.C., 127, 154, 174Maxwello lygtis, 157, 297
reliatyvistinė, 244, 248Maxwello lygtys, 1
integraliniame pavidale,152
medžiagos įmagnetinimas,150
menamas vienetas, 287menčių sandaugos, 313mentė, 32, 302, 309, 329, 350,
351k-ojo rango, 302duali, 313
metodasdualizacijos, 71
metrika, 195, 299metrinis tenzorius, 136
Cl1,3 algebros, 211Michelson A, 205minijuosta, 199, 200Minkowski H., 211, 222, 241
Minkowskio plokštuma, 54,215
miuonas, 235moda, 118modelis
dviejų lygmenų, 185modulis, 34, 40
spinoriaus, 275, 278vektoriaus, 17
momentasjudesio kiekio, 24, 90, 191,
232, 282magnetinis, 190
monopolis, 246jo lygtis, 246
Muellerio matrica, 166multivektoriaus diferencialas,
339multivektoriaus išvestinė
skaliarinė, 96multivektoriaus tolydumas, 96multivektorinės lygtys, 77multivektorius, 2, 3, 10, 31,
60, 299, 301r rango, 28Cl3,0 algebros, 66atvirkštinis, 72, 73, 305faktorizuojamas, 304homogeninis, 24, 31, 32,
301, 303idempotentinis, 72, 261jo prastinimas, 33, 74nulinis, 211tikrinis, 188žymėjimas, 358unitarinis, 83
Nnabla, 126, 352, 359n-matės erdvės, 142Cl1,3 algebros, 242Cl3,0 algebros, 122, 242keturmatė, 242kvaternioninis, 49skaliarinis, 129, 140

374
neutronas, 191, 271Newtono lygtis, 115
Cl3,0 algebroje, 252Noether E., 169, 232Noether teorema, 169norma, 24, 34, 39, 40, 291
kvaterniono, 51vektoriaus, 17
nulio daliklis, 162
Ooktonionas, 30operatorius
atvirkštinis, 245d’Alamberto, 127del, 127diferencijavimo vektorinis,
233dualus, 157ermitinis, 177fundamentalusis diferencia-
linis, 335greičio, 201Hilberto erdvės, 277idempotentinis, 162impulso, 196, 287infinitezimalusis, 317Laplace’o, 126, 157, 340nabla, 121, 142, 285pėdsako, 177projekcinis, 162skaliarinis diferencialinis,
335sukimo, 317sukinio, 179
orientacijadaugdaros, 329kubo, 9paviršiaus, 329
orientuotas sektorius, 61ortai, 8ortochroniškumo sąlyga, 214,
215, 218ortogonalizacija
Grammo-Schmidto, 313
osciliacijosRabio, 198
osciliatoriusdvimatis, 105
Ppagreitis, 96, 98, 115, 236
keturmatis, 225pagrindinė analizės teorema,
328parametrai
Stokes’o, 165paravektorius, 67pasaulinė linija, 210, 213, 222,
257, 264, 267, 269pastovioji
giromagnetinė, 190Rashbos, 199
Pauli W., 175, 192Paulio matricos, 175Penrose R., 298perskėlimas
bivektoriaus, 232erdvėlaikio, 242, 286vektoriaus, 232vektorinio operatoriaus, 233
perspektyva, 178pėdsakas, 177, 244Pitagoro teorema, 12planimetrija, 11, 12, 35plokščia banga, 259plokštuma, 93
bangos kritimo, 172euklidinė, 55Minkowskio, 55, 215poliarizacijos, 163
plotaslygiagretainio, 16, 40trikampio, 46, 91
poerdvis, 19Poincaré H., 165Poincaré sfera, 165Poyntingo vektorius, 165, 247poliarizacija, 150, 163, 194,
198
apskritiminė, 161, 260bangos, 259elektrinė, 167elipsinė, 164magnetinė, 167šviesos, 166tiesinė, 163, 261
poliarizacinis filtras, 163polinis vektorius, 62posūkis, 218potencialas
elektromagnetinis, 297keturmatis, 248, 263, 284Liénardo-Wiecherto, 263,
264skaliarinis, 196, 249, 284vektorinis, 196, 249, 284
potencinis laiptelis, 294pozitronas, 273, 274, 284, 285pralaidumo koeficientas, 172,
173precesija, 102, 103, 192, 202
Thomo, 237precesijos lygtis, 195principas
superpozicijos, 157Proca lygtys, 297projekcija, 193, 231, 246
bivektoriaus, 85srovės, 280sukinio, 179, 184vektoriaus, 42
projektorius, 326rango, 28, 64, 301
pseudoautomorfizmas, 307,308
pseudoskaliaras, 67, 138, 357Cl1,3 algebros, 206, 207Cl3,0 algebros, 65, 176Clp,q algebros, 299atvirkštinis, 72, 300daugdaros, 328
PT tranformacija, 306

375
RRabio osciliacijos, 198rangas, 11
mechaninių dydžių, 115rango inversija, 28, 305rango projektorius, 301Rashbos konstanta, 199rejekcija, 193, 246
vektoriaus, 42reliatyvistinis įvykis, 210, 211reliatyvumo teorija, 54, 205reliatyvus greitis, 225reliatyvusis greitis, 225reversija, 28, 209Riemann B., 57robotika, 355rotorius, 41, 44, 55, 81, 112,
115, 121apibendrintas, 337, 338bendras pavidalas, 82eksponentės pavidalas, 86,
292jo judėjimo lygtis, 253jo konstravimas, 86judėjimo lygtis, 118Lorentzo, 217, 218, 279trigonometrinis pavidalas,
83Rutherfordo sklaida, 111
Ssandauga
bivektoriaus ir bivektoriaus,350
Cliffordo, 3Cliffordo algebrų, 322Dorsto vidinė, 320dviejų bivektorių, 70dviejų vektorių, 62, 348geometrinė, 3, 62iš skaliaro, 317išorinė, 5, 15, 67, 74, 308,
309keturių vektorių, 349kvaternionų, 50
multivektorių, 48pleištinė, 5santraukos, 317skaliarinė, 4skaliarinė multivektorių,
308, 316skaliaro ir mentės, 24tiesioginė, 321trijų vektorių, 64, 349vektoriaus ir bivektoriaus,
23, 67, 349interpretacija, 69
vektoriaus ir mentės, 350,351
vektorinė, 5, 15, 20, 62vidinė, 4, 67, 74
sandaugosmenčių, 351
sandaugųtvarka, 32žymėjimas, 359
savasis greitis, 222, 250savasis laikas, 222sąlyga
Cauchy-Riemanno, 339kraštinė, 167ortochroniškumo, 214
sąveikasukinio ir orbitos, 199, 200,
271Schrödinger E., 175Schrödingerio-Paulio lygtis,
194sfera
Blocho, 189, 194vienetinė, 180
signatūra, 59algebros, 300erdvėlaikio, 205vektoriaus, 300
simetrijakalibruotinė, 158Larmoro ir Reinicho, 158Maxwello lygčių, 158
skaičiai
Cliffordo, 30kompleksiniai, 11
skaičių aibės, 357skaičių algebros, 30skaliarinė sandauga, 4skaliarinis dydis, 1skaliarinis potencialas, 196slinkties srovė, 154Snellio formulė, 170spektras, 292
ultrareliatyvistinis, 291spindulys-vektorius, 105spinorius, 179, 198, 273
Cl1,3 algebros, 275, 282Cl3,0 algebros, 180, 274jo norma, 275jo parametrizacija, 180Paulio-Schrödingerio, 274reliatyvistinis, 292sujungtinis, 275tikrinis, 200
spintronika, 196srautas, 150
magnetinės indukcijos, 150srovė
keturmatė, 243, 280, 288,293
paviršinė, 167slinkties, 154
standusis kūnas, 115statmenumas
vektorių, 6, 12stebiniai, 278
klasikiniai, 281Stokes’o teorema, 333stūmio kampas, 226, 227stūmio parametras, 226stūmis, 55, 215, 218, 289sujungtinumas
erdvėlaikio, 209, 275, 282krūvio, 29, 308
sukimasbivektoriaus, 85erdvėje, 81erdvėlaikyje, 214

376
Lorentzo, 215Minkowskio erdvėlaikyje,
217plokštumoje, 44pseudoskaliaro, 85tikrasis, 214veleno, 88
sukinys, 175, 178, 181, 271Cl1,3 algebroje, 280, 282,
293Cl3,0 algebroje, 185elektrono, 280jo precesija, 193vidutinis, 184, 188
sukinys-orbitasąveika, 271
sumamultivektorių, 26tiesioginė, 321vektorių, 18
sumavimasmultivektorių, 26
superpozicija, 281spinorių, 292
Ššaltinis, 286šviesos kūgis, 213šviesos poliarizacija, 166
Ttankis
elektrinio krūvio, 120energijos, 165tikimybės, 288
tapatybėJacobio, 92, 93
Tartaglia, 57taškas virš nablos, 123tenzorinis skaičiavimas, 15,
278tenzorius
metrinis, 136teorema
Cauchy, 119Gausso, 331
Noether, 157, 232pagrindinė analizės, 148,
328Pitagoro, 12sinusų, 45Stokes’o, 148, 333Wedderburno-Artino, 324
terpėhomogeniška, 157
Thomo precesija, 237, 240tiesinė nepriklausomybė
bivektorių, 26vektorių, 25
trajektorija, 96, 98, 104apskritiminė, 110elektriniame lauke, 258elipsinė, 105, 106, 110hiperbolinė, 110, 111magnetiniame lauke, 258parabolinė, 110pasaulinė, 223, 238
transformacija, 27aktyvi, 215bivektoriaus-bivektoriaus,
89dualumo, 66, 137Galilei’aus, 214, 241krūvio sujungtinumo, 285Lorentzo, 214, 233, 241ortogonali, 305pasyvi, 215stūmio, 250vektoriaus-vektoriaus, 88
transliacija, 178trikampis, 45trivektorius, 2, 59, 207
dydis, 3orientacija, 3, 65žymėjimas, 358
tvermės dėsnisenergijos, 290
tvistorius, 298tūris
cilindro, 65gretasienio, 9, 16, 64
rutulio išpjovos, 65vienetinis, 61
Uuždavinys
faktorizacijos, 305tikrinių verčių, 186
Vvaizdavimas matricomis
Cl0,2 algebros, 58Cl1,1 algebros, 58Cl1,3 algebros, 206Cl2,0 algebros, 57Cl3,0 algebros, 175bazės, 56kompleksinių skaičių, 56kvaternionų, 52
vakuumas, 241vektoriai
jų savybės, 347komplanariniai, 47tiesiškai nepriklausomi, 303
vektorinė išvestinė, 122, 352bivektorinio lauko, 125multivektorinio lauko, 126pseudoskaliarinio lauko,
126skaliarinio lauko, 122vektorinio lauko, 124
vektorinis potencialas, 196vektorinis skaičiavimas, 15, 85vektorius, 1, 2
aksialinis, 30, 62, 107, 116,149, 178
atvirkštinis, 12, 19, 73bangos, 158bazinis, 8bra, 179dualus, 114, 138, 176ket, 179liestinis, 140magnetinio lauko, 120nulinis, 261, 304nulinis vėluojantis, 263Poyntingo, 165

377
poliarizacijos, 189polinis, 62savybės, 347spindulys, 105srovės, 279tikrinis, 186žymėjimas, 358
versorius, 304atvirkštinis, 304
vidinė sandauga, 4bivektorių, 311multivektorių, 310, 311skaliaro ir multivektoriaus,
311vektorių, 6, 348
vienmentė, 32Voigt W., 205

378
CLIFFORD GEOMETRIC ALGEBRAAND ITS APPLICATIONS
(in Lithuanian language)
Adolfas DARGYS, Center of Physical Sciences and Technology, SemiconductorPhysics Institute, Vilnius
andArtūras ACUS, Vilnius University, Theoretical Physics and Astronomy
Institute, Vilnius
Geometric or Clifford algebra is a powerfull mathematical language which has a widerange of diverse applications in physics, engineering and computer science (graphics, ro-botics and computer vision). The book provides the first acquaintance with this new andexciting mathematical language and primary is devoted to students of natural sciences.Topics covered here demonstrate its usage in solving problems of classical and quantummechanics, special relativity as well as classical and relativistics electrodynamics. Geo-metric algebra has significant advantages over traditional approaches. In particular, it iscoordinate-free and has direct geometrical interpretation. The overhelming novelty andscope of this mathematical language lets us to believe that geometric algebra will becomeuniversal tool for physicists and engineers of the XXI century.
CONTENTSIntroduction i1. The first encounter with geometric algebra 12. Main concepts and axioms of geometric algebra 173. Two dimensional space. Cl2,0, Cl0,2 and Cl1,1 algebras 354. Three dimensional space. Cl3,0 algebra 595. Classical mechanics. Trajectories and rotations 916. The fields, how to differentiate and integrate 1197. Electromagnetic field in Cl3,0 algebra 1498. Schrödinger-Pauli quantum mechanics 1759. Cl1,3 algebra and relativity theory 20510. Relativistic electrodynamics 24111. Dirac equation 27312. Clp,q algebras 29913. Supplement 345


Adolfas DargysArtūras Acus
CLIFFORDO GEOMETRINĖ ALGEBRA IR JOS TAIKYMAI
Spausdino:UAB „Petro ofsetas“, Naujoji Riovonių g. 25C, LT-03153, Vilniusurl. http://www.petroofsetas.lt
tel. (+370 5) 273 33 47
Tiražas: 200 vnt.
Internete: http://mokslasplius.lt/files/GA.html
El. paštas: [email protected]



















