Embed Size (px)
Citation preview
CME 345: MODEL REDUCTION - Balanced Truncation
CME 345: MODEL REDUCTIONBalanced Truncation
Charbel Farhat & David AmsallemStanford University
These slides are based on the recommended textbook: A.C. Antoulas, “Approximation ofLarge-Scale Dynamical Systems,” Advances in Design and Control, SIAM,
ISBN-0-89871-529-6
1 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Outline
1 Reachability and Observability
2 Balancing
3 Balanced Truncation Method
4 Error Analysis
5 Stability Analysis
6 Computational Complexity
7 Comparison with the POD Method
8 Application
9 Balanced POD Method
2 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Systems Considered
Consider the following stable LTI high-dimensional system
d
dtw(t) = Aw(t) + Bu(t)
y(t) = Cw(t)
w(0) = w0
w ∈ RN : State variablesu ∈ Rp: Input variables, typically p � Ny ∈ Rq: Output variables, typically q � N
Recall that the solution w(t) of the above linear ODE can bewritten as
w(t) = φ(t,u; t0,w0) = eA(t−t0)w(t0)+
∫ t
t0
eA(t−τ)Bu(τ)dτ, ∀t ≥ t0
3 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Reachability, Controllability and Observability
Definition (1)
A state w ∈ RN is reachable if there exists an input function u(.) offinite energy and a time T <∞ such that under this input and zeroinitial condition, the state of the system is w
Definition (2)
A state w ∈ RN is controllable to the zero state if there exist an inputfunction u(.) and a time T <∞ such that
φ(T ,u; 0,w) = 0N
Definition (3)
A state w ∈ RN is unobservable if for all t ≥ 0,
y(t) = Cφ(t, 0; 0,w) = 0q
4 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Completely Controllable Dynamical System
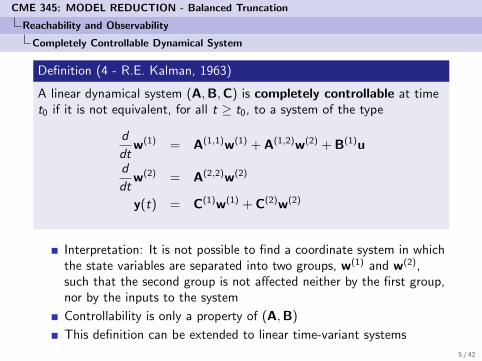
Definition (4 - R.E. Kalman, 1963)
A linear dynamical system (A,B,C) is completely controllable at timet0 if it is not equivalent, for all t ≥ t0, to a system of the type
d
dtw(1) = A(1,1)w(1) + A(1,2)w(2) + B(1)u
d
dtw(2) = A(2,2)w(2)
y(t) = C(1)w(1) + C(2)w(2)
Interpretation: It is not possible to find a coordinate system in whichthe state variables are separated into two groups, w(1) and w(2),such that the second group is not affected neither by the first group,nor by the inputs to the system
Controllability is only a property of (A,B)
This definition can be extended to linear time-variant systems
5 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Completely Observable Dynamical System
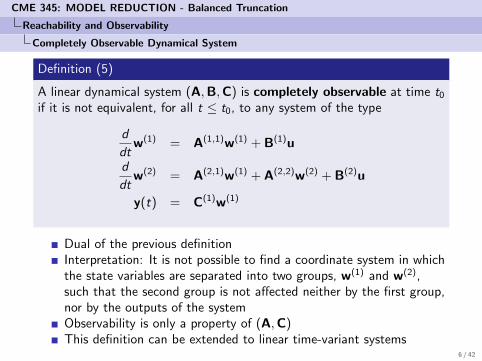
Definition (5)
A linear dynamical system (A,B,C) is completely observable at time t0if it is not equivalent, for all t ≤ t0, to any system of the type
d
dtw(1) = A(1,1)w(1) + B(1)u
d
dtw(2) = A(2,1)w(1) + A(2,2)w(2) + B(2)u
y(t) = C(1)w(1)
Dual of the previous definitionInterpretation: It is not possible to find a coordinate system in whichthe state variables are separated into two groups, w(1) and w(2),such that the second group is not affected neither by the first group,nor by the outputs of the systemObservability is only a property of (A,C)This definition can be extended to linear time-variant systems
6 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Example: Simple RLC Circuit
_
+
u1
y1
w1
w2
R = 1 R = 1
L
C
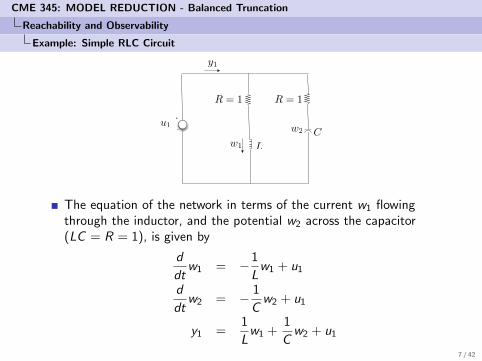
The equation of the network in terms of the current w1 flowingthrough the inductor, and the potential w2 across the capacitor(LC = R = 1), is given by
d
dtw1 = −1
Lw1 + u1
d
dtw2 = − 1
Cw2 + u1
y1 =1
Lw1 +
1
Cw2 + u1
7 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Example: Simple RLC Circuit
Under the change of variable w1 = 0.5(w1 + w2) andw2 = 0.5(w1 − w2), the system becomes
d
dtw1 = −1
Lw1 + u1
d
dtw2 = −1
Lw2
y1 =2
Lw2 + u1
w1 is controllable but not observable
w2 is observable but not controllable
8 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Canonical Structure Theorem
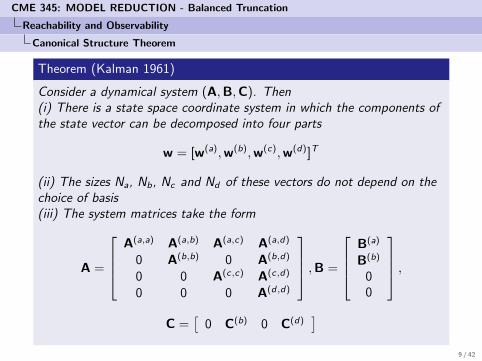
Theorem (Kalman 1961)
Consider a dynamical system (A,B,C). Then(i) There is a state space coordinate system in which the components ofthe state vector can be decomposed into four parts
w = [w(a),w(b),w(c),w(d)]T
(ii) The sizes Na, Nb, Nc and Nd of these vectors do not depend on thechoice of basis(iii) The system matrices take the form
A =
A(a,a) A(a,b) A(a,c) A(a,d)
0 A(b,b) 0 A(b,d)
0 0 A(c,c) A(c,d)
0 0 0 A(d,d)
,B =
B(a)
B(b)
00
,C =
[0 C(b) 0 C(d)
]9 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Canonical Structure Theorem
The four parts of w can be interpreted as follows
Part (a) is completely controllable but unobservablePart (b) is completely controllable and completely observablePart (c) is uncontrollable and unobservablePart (d) is uncontrollable and completely observable
This theorem can be extended to linear time-variant systems
10 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Reachable and Controllable Subspaces
Definition (6)
The reachable subspace Wreach ⊂ RN of a system (A,B,C) is the setcontaining all of the reachable states of the system.
R(A,B) = [B,AB, · · · ,AN−1B, · · · ]
is the reachability matrix of the system.
Definition (7)
The controllable subspace Wcontr ⊂ RN of a system (A,B,C) is the setcontaining all of the controllable states of the system
11 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Reachable and Controllable Subspaces
Theorem
Consider the system (A,B,C). Then
Wreach = im R(A,B)
Corollary
(i) AWreach ⊂Wreach
(ii) The system is completely reachable if and only if rank R(A,B) = N(iii) Reachability is basis independent
12 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Reachability and Observability Gramians
Definition
The reachability (controllability) Gramian at time t <∞ is defined asthe N × N symmetric positive semi-definite matrix
P(t) =
∫ t
0
eAτBB∗eA∗τdτ
Definition
The observability Gramian at time t <∞ is defined as the N × Nsymmetric positive semi-definite matrix
Q(t) =
∫ t
0
eA∗τC∗CeAτdτ
13 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Reachability and Observability Gramians
Proposition
The columns of P(t) span the reachability subspaceWreach = im R(A,B)
Corollary
A system (A,B,C) is reachable if and only if P(t) is symmetric positivedefinite at some time t > 0
14 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Equivalence Between Reachability and Controllability
Theorem
For continuous linear dynamical systems, the notions of controllabilityand reachability are equivalent – that is,
Wreach = Wcontr
15 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Unobservability Subspace
Definition
The unobservability subspace Wunobs ⊂ RN is the set of allunobservable states of the system.
O(C,A) = [C∗,A∗C∗, · · · , (A∗)iC∗, · · · ]∗
is the observability matrix of the system.
16 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Unobservability Subspace
Theorem
Consider the system (A,B,C). Then
Wunobs = ker O(C,A)
Corollary
(i) AWunobs ⊂Wunobs
(ii) The system is completely observable if and only if rank O(C,A) = N(iii) Observability is basis independent
17 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Infinite Gramians
Definition
The infinite reachability (controllability) Gramian is defined for astable LTI system as the N × N symmetric positive semi-definite matrix
P =
∫ ∞0
eAtBB∗eA∗tdt
Definition
The infinite observability Gramian is defined for a stable LTI systemas the N × N symmetric positive semi-definite matrix
Q =
∫ ∞0
eA∗tC∗CeAtdt
18 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Infinite Gramians
Using the Parseval theorem, the two previously defined Gramianscan be written in the frequency domain as follows
infinite reachability Gramian
P =1
2π
∫ ∞−∞
(jωIN − A)−1BB∗(−jωIN − A∗)−1dω
infinite observability Gramian
Q =1
2π
∫ ∞−∞
(−jωIN − A∗)−1C∗C(jωIN − A)−1dω
19 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Infinite Gramians
The two infinite Gramians are solution of the following Lyapunovequations
infinite reachability Gramian
AP + PA∗ + BB∗ = 0N
infinite observability Gramian
A∗Q+QA + C∗C = 0N
20 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Reachability and Observability
Energetic Interpretation
P and Q are respective bases for the reachable and observablesubspaces
‖ ‖P−1 and ‖ ‖Q are semi-norms
For a reachable system, the inner product based on P−1characterizes the minimal energy required to steer the state from 0to w as t →∞
‖w‖2P−1 = wTP−1w
The inner product based on Q indicates the maximal energyproduced by observing the output of the system corresponding to aninitial state w0 when no input is applied
‖w0‖2Q = wT0 Qw0
21 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balancing
Model Order Reduction Based on Balancing
Model order reduction strategy: Eliminate the states w that are atthe same time
difficult to reach, i.e., require a large energy ‖w‖2P−1 to be reacheddifficult to observe, i.e., produce a small observation energy ‖w‖2Q
The above notions are basis dependent
One would like to consider a basis where both concepts areequivalent, i.e., where the system is balanced
22 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balancing
The Effect of Basis Change on the Gramians
Balancing requires changing the basis for the state using atransformation T ∈ GL(N)
w = Tw
Then
eAtB⇒ TeAtT−1TB = TeAtBB∗eA∗t ⇒ B∗T∗T−∗eA∗tT∗ = B∗eA∗tT∗
the reachability Gramian becomes
P = TPT∗
CeAt ⇒ CT−1TeAtT−1 = CeAtT−1
eA∗tC∗ ⇒ T−∗eA∗tT∗T−∗C∗ = T−∗eA∗tC∗
the observability Gramian becomes
Q = T−∗QT−1
23 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balancing
Balancing Transformation
The balancing transformations Tbal and T−1bal can be computed asfollows
1 compute the Cholesky factorization P = UU∗
2 compute the eigenvalue decomposition of U∗QU
U∗QU = KΣ2K∗
where the entries in Σ are ordered decreasingly3 compute the transformations
Tbal = Σ12 K∗U−1
T−1bal = UKΣ−
12
One can then check that
TbalPT∗bal = T−∗balQT−1bal = Σ
Definition (Hankel Singular Values)
Σ = diag(σ1, · · · , σN) contains the N Hankel singular values of thesystem
24 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balancing
Variational Interpretation
Computing the balancing transformation Tbal is equivalent tominimizing the following function
minT∈GL(N)
f (T) = minT∈GL(N)
trace(TPT∗ + T−∗QT−1)
For the optimal transformation Tbal, the function takes the value
f (Tbal) = 2tr(Σ) = 2N∑i=1
σi
where {σi}Ni=1 are the Hankel singular values
25 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balanced Truncation Method
Block Partitioning of the System
Applying the change of variable w = Tbalw transforms the givendynamical system into (A, B, C) where
TbalAT−1bal = A, TbalB = B, CT−1bal = C
Let 1 ≤ k ≤ N; the system can be partitioned in blocks as
A =
[A11 A12
A21 A22
], B =
[B1
B2
], C =
[C1 C2
]The subscripts 1 and 2 denote the dimensions k and N − k,respectively
26 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balanced Truncation Method
Block Partitioning of the System
The blocks with the subscript 1 correspond to the most observableand reachable states
The blocks with the subscript 2 correspond to the least observableand reachable states
The ROM of size k obtained by Balanced Truncation is then thesystem
(Ar ,Br ,Cr ) = (A11, B1, C1) ∈ Rk×k × Rk×p × Rq×k
The left and right ROBs are
W = T∗bal(:, 1 : k) and V = Sbal(:, 1 : k), respectively
where Sbal = T−1bal
27 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Error Analysis
Error Criterion
Definition (The Hardy space H∞)
The H∞-norm associated with a system characterized by a transferfunction G(·) is defined as
‖G‖H∞ = supz∈C+
‖G(z)‖∞ = supz∈C+
σmax (G(z))
Proposition
(i) ‖G‖H∞ = supω∈R‖G(iω)‖∞ = sup
ω∈Rσmax (G(iω))
(ii) ‖G‖H∞ = supu6=0
‖y(·)‖2‖u(·)‖2
= supu6=0
√∫∞0‖y(t)‖22dt∫∞
0‖u(t)‖22dt
The H∞ norm of the error system between the high-dimensional andreduced-order models can (and will) be used as an error criterion
28 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Error Analysis
Theorem
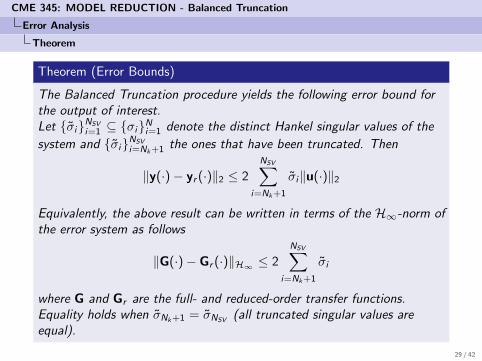
Theorem (Error Bounds)
The Balanced Truncation procedure yields the following error bound forthe output of interest.Let {σi}NSV
i=1 ⊆ {σi}Ni=1 denote the distinct Hankel singular values of the
system and {σi}NSV
i=Nk+1 the ones that have been truncated. Then
‖y(·)− yr (·)‖2 ≤ 2
NSV∑i=Nk+1
σi‖u(·)‖2
Equivalently, the above result can be written in terms of the H∞-norm ofthe error system as follows
‖G(·)− Gr (·)‖H∞ ≤ 2
NSV∑i=Nk+1
σi
where G and Gr are the full- and reduced-order transfer functions.Equality holds when σNk+1 = σNSV
(all truncated singular values areequal).
29 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Error Analysis
Theorem
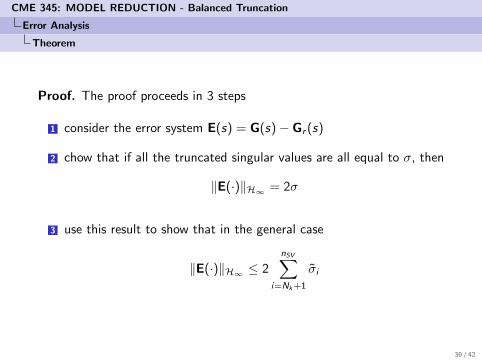
Proof. The proof proceeds in 3 steps
1 consider the error system E(s) = G(s)− Gr (s)
2 chow that if all the truncated singular values are all equal to σ, then
‖E(·)‖H∞ = 2σ
3 use this result to show that in the general case
‖E(·)‖H∞ ≤ 2
nSV∑i=Nk+1
σi
30 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Stability Analysis
Theorem
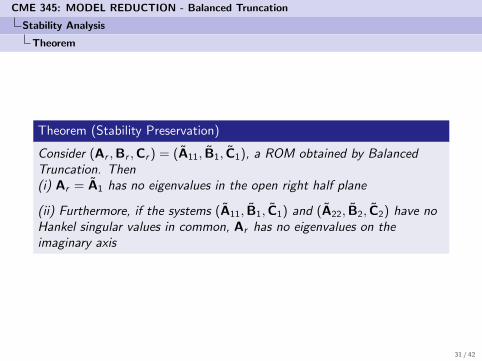
Theorem (Stability Preservation)
Consider (Ar ,Br ,Cr ) = (A11, B1, C1), a ROM obtained by BalancedTruncation. Then(i) Ar = A1 has no eigenvalues in the open right half plane
(ii) Furthermore, if the systems (A11, B1, C1) and (A22, B2, C2) have noHankel singular values in common, Ar has no eigenvalues on theimaginary axis
31 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Computational Complexity
Numerical Methods
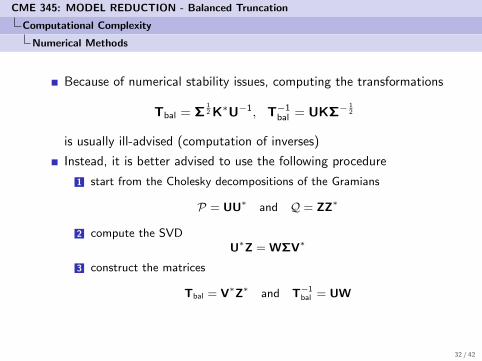
Because of numerical stability issues, computing the transformations
Tbal = Σ12 K∗U−1, T−1bal = UKΣ−
12
is usually ill-advised (computation of inverses)
Instead, it is better advised to use the following procedure
1 start from the Cholesky decompositions of the Gramians
P = UU∗ and Q = ZZ∗
2 compute the SVDU∗Z = WΣV∗
3 construct the matrices
Tbal = V∗Z∗ and T−1bal = UW
32 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Computational Complexity
Cost and Limitations
Balanced Truncation leads to ROMs with quality and stabilityguarantees; however
the computation of the Gramians is expensive as it requires thesolution of a Lyapunov equation (O(N3) operations)
for this reason, Balanced Truncation is in general impractical forlarge systems of size N & 105
33 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Comparison with the POD Method
POD
Recall the theorem underlying the construction of a POD basis
Theorem
Let K ∈ RN×N be the real symmetric semi-definite positive matrixdefined as
K =
∫ T0
w(t)w(t)Tdt
Let λ1 ≥ λ2 ≥ · · · ≥ λN ≥ 0 denote the ordered eigenvalues of K, and letφi ∈ RN , i = 1, · · · ,N denote the associated eigenvectors
Kφi = λi φi , i = 1, · · · ,N.
The subspace V = range(V) of dimension k minimizing J(ΠV,V) is the
invariant subspace of K associated with the eigenvalues λ1, · · · , λk
34 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Comparison with the POD Method
POD for an Impulse Response
The response of an LTI system to a single impulse input with a zeroinitial condition is
w(t) = eAtB
Consequently, the reachability Gramian is
K =
∫ T0
w(t)w(t)Tdt =
∫ T0
eAtBBT eAT tdt = P
Unlike the Balanced Truncation method, the POD method does nottake into account the observability Gramian to determine the ROM,and therefore every observable state may be truncated
35 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Application
CD Player System
The goal is to model the position of the lens controlled by a swingarm
2-inputs/2-outputs system
36 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Application
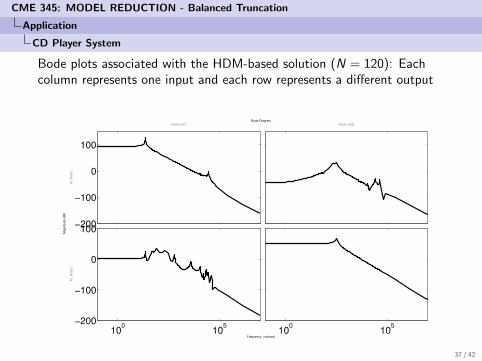
CD Player System
Bode plots associated with the HDM-based solution (N = 120): Eachcolumn represents one input and each row represents a different output
−200
−100
0
100
From: In(1)
To: O
ut(
1)
100
105
−200
−100
0
100
To: O
ut(
2)
From: In(2)
100
105
Bode Diagram
Frequency (rad/sec)
Magnitude (
dB
)
37 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Application
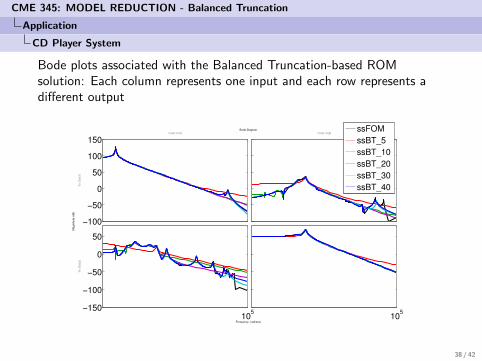
CD Player System
Bode plots associated with the Balanced Truncation-based ROMsolution: Each column represents one input and each row represents adifferent output
−100
−50
0
50
100
150From: In(1)
To: O
ut(
1)
105
−150
−100
−50
0
50
To: O
ut(
2)
From: In(2)
105
Bode Diagram
Frequency (rad/sec)
Magnitude (
dB
)
ssFOM
ssBT_5
ssBT_10
ssBT_20
ssBT_30
ssBT_40
38 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balanced POD Method
The Balanced POD Method
The Balanced POD (BPOD) method generates snapshots for thedual system in addition to the POD snapshots
S =[(jω1I− A)−1B, · · · , (jωNsnap I− A)−1B
]Sdual =
[(−jω1I− A∗)−1C∗, · · · , (−jωNsnap I− A∗)−1C∗
]Then, right and left ROBs can be computed as follows
STdualS = UΣZT (SVD)
V = SZkΣ−1/2k
W = SdualUkΣ−1/2k
where the subscript k designates the first k terms of the singularvalue decomposition
If no truncation occurs, the result is equivalent to two-sided momentmatching at si ∈ {ω1, · · · , ωNsnap}
39 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balanced POD Method
Balanced Truncation and POD in the Time Domain
The POD method in the time domain is based solely on thereachability concept
However, the BPOD method
introduces also the notion of observability in the construction of aROMis tractable for very large-scale systemsprovides an approximation to the Balanced Truncation methoddoes not however guarantee in general the stability of the resultingROM
40 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balanced POD Method
Application
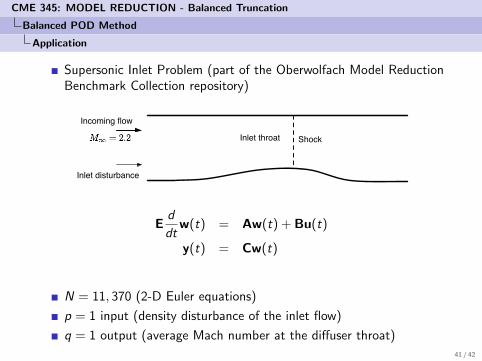
Supersonic Inlet Problem (part of the Oberwolfach Model ReductionBenchmark Collection repository)
Shock
Incoming flow
Inlet disturbance
Inlet throat
Ed
dtw(t) = Aw(t) + Bu(t)
y(t) = Cw(t)
N = 11, 370 (2-D Euler equations)
p = 1 input (density disturbance of the inlet flow)
q = 1 output (average Mach number at the diffuser throat)
41 / 42
CME 345: MODEL REDUCTION - Balanced Truncation
Balanced POD Method
Application
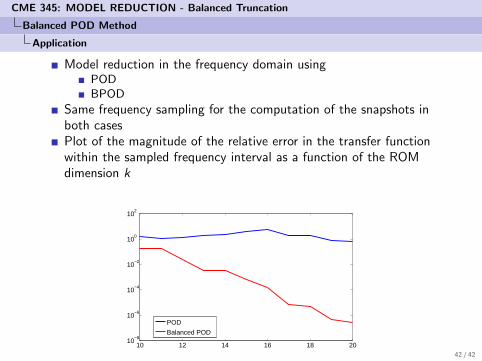
Model reduction in the frequency domain usingPODBPOD
Same frequency sampling for the computation of the snapshots inboth casesPlot of the magnitude of the relative error in the transfer functionwithin the sampled frequency interval as a function of the ROMdimension k
10 12 14 16 18 2010
−8
10−6
10−4
10−2
100
102
POD
Balanced POD
42 / 42





























