Embed Size (px)
Citation preview
Full Terms & Conditions of access and use can be found athttp://www.tandfonline.com/action/journalInformation?journalCode=uaty20
Download by: [The University of British Columbia] Date: 04 December 2016, At: 09:27
Assistive TechnologyThe Official Journal of RESNA
ISSN: 1040-0435 (Print) 1949-3614 (Online) Journal homepage: http://www.tandfonline.com/loi/uaty20
Comparison of the inertial properties and forcesrequired to initiate movement for three gaittrainers
Ginny Paleg PT, DScPT, MPT, Morris Huang BSME, Stephanie C. VasquezGabela BSME, Stephen Sprigle PhD & Roslyn Livingstone OT MSc(RS)
To cite this article: Ginny Paleg PT, DScPT, MPT, Morris Huang BSME, Stephanie C. VasquezGabela BSME, Stephen Sprigle PhD & Roslyn Livingstone OT MSc(RS) (2016) Comparison of theinertial properties and forces required to initiate movement for three gait trainers, AssistiveTechnology, 28:3, 137-143, DOI: 10.1080/10400435.2015.1123780
To link to this article: http://dx.doi.org/10.1080/10400435.2015.1123780
Accepted author version posted online: 28Jan 2016.Published online: 28 Jan 2016.
Submit your article to this journal
Article views: 114
View related articles
View Crossmark data

Comparison of the inertial properties and forces required to initiate movement forthree gait trainersGinny Paleg, PT, DScPT, MPTa, Morris Huang, BSMEb, Stephanie C. Vasquez Gabela, BSMEb, Stephen Sprigle, PhD b,and Roslyn Livingstone, OT MSc(RS)c
aMontgomery County Infants and Toddlers Program, Rockville, Maryland, USA; bRehabilitation Engineering & Applied Research Laboratory, GeorgiaInstitute of Technology, Atlanta, Georgia, USA; cSunny Hill Health Centre for Children, Vancouver, BC, Canada
ABSTRACTThe purpose of this study was to evaluate the inertial properties and forces required to initiatemovement ontwo different surfaces in a sample of three commonly prescribed gait trainers. Tests were conducted in alaboratory setting to compare the Prime Engineering KidWalk, Rifton Pacer, and Snug Seat Mustangwith andwithout a weighted anthropometric test dummy configured to the weight and proportions of a 4-year-oldchild. The Pacer was the lightest and the KidWalk the heaviest while footprints of the three gait trainers weresimilar. Weight was borne fairly evenly on the four casters of the Pacer andMustang while 85% of the weightwas borne on the large wheels of the mid-wheel drive KidWalk. These differences in frame style, wheel, andcaster style and overall mass impact inertial properties and forces required to initiate movement. Test resultssuggest that initiation forces on tile were equivalent for the Pacer and KidWalk while the Mustang had thehighest initiation force. Initiation forces on carpet were lowest for the KidWalk and highest for the Mustang.This initial study of inertia and movement initiation forces may provide added information for clinicians toconsider when selecting a gait trainer for their clients.
ARTICLE HISTORYAccepted 16 November 2015
KEYWORDSassistive devices; childrenwith physical disabilities;mobility; neuromotordisorder; physical disability
Introduction
The ability to move around independently impacts psychologi-cal development throughout the lifespan (Anderson et al.,2013). Ambulatory status has been linked to level of self-careand social participation for children with cerebral palsy (CP)(Lepage, Noreau, & Bernard, 1998) and use of supportivewalking equipment to foster independent mobility has alsobeen recommended for children with other complex develop-mental delays and severe to profound intellectual impairment(Lancioni et al., 2009). Children with CP may be classifiedaccording to their gross motor function and need for assistivetechnologies using the Gross Motor Function ClassificationSystem (GMFCS; Palisano et al., 2008). Children classified aslevel III use handheld walkers in childhood, although walkingability may decrease in adolescence (Hanna et al., 2009).Children in levels IV and V typically use walking devices thatprovide body-weight support along with additional trunk andpelvic stabilization and control. These devices are commonlyknown as gait trainers. Children with other multiple and com-plex disabilities or developmental delays may exhibit similarlevels of ability and also benefit from use of gait trainers.
Gait trainers are devices that provide body weight supportthrough a fabric or solid seat and have components that helpto stabilize and support the trunk, pelvis, and (in some cases)the head. Clinicians have been modifying walkers to provideadditional support for more complex clients for over 40 years(Brown, 1979; Mathis, 1975; Munroe, 1973) and gait trainers
have been commercially available for over 30 years (Eve, 1982;Meadows, Meyerink, Farley, & Gilmour, 1992).
A recently published systematic review (Paleg & Livingstone,2015) found mainly descriptive evidence supporting positiveimpact of gait trainer interventions on a range of activity out-comes, with some studies reporting impact on affect, motivation,and participation. Two non-randomized two-group studies(Eisenberg, Zuk, Carmeli, & Katz-Leurer, 2009; Van DerPutten, Vlaskamp, Reynders, & Nakken, 2005) reported statisti-cally significant impact on mobility level with one (Eisenberget al., 2009) finding significant impact on bowel function. Nostudies evaluating the effectiveness of different types of gaittrainers, describing equipment parameters or the effort requiredto move about using these devices were identified. Survey evi-dence (Low, McCoy, Beling, & Adams, 2011) suggests that gaittrainer choice often relates to familiarity and availability ofdevices and there are no published guidelines to support thera-pists’ clinical reasoning around choosing between differentmod-els depending on individual children’s needs and environmentalconsiderations. While many factors need to be considered whenselecting a gait trainer for individual children, physical para-meters such as wheel configuration and forces required to initi-ate movement may be overlooked. The purpose of this study wasto evaluate the inertial properties and forces required to initiatemovement of a sample of three commonly prescribed gait trai-ners, and to relate these results to relevant product features ofweight, footprint, type, and location of wheels.
CONTACT Roslyn Livingstone, OT MSc(RS) [email protected] Sunnyhill Health Centre for Children, 3644 Slocan St., Vancouver, BC V 5 M3E8, Canada.Color versions of one or more of the figures in the article can be found online at www.tandfonline.com/UATY.
ASSISTIVE TECHNOLOGY2016, VOL. 28, NO. 3, 137–143http://dx.doi.org/10.1080/10400435.2015.1123780
© 2016 RESNA

Methods and materials
Three gait trainers, the Prime Engineering KidWalk (www.primeengineering.com), Rifton Pacer (www.rifton.com),and Snug Seat Mustang (www.snugseat.com) were chosenas a convenience sample (see Figure 1). These are threecommonly used models for individuals with motor impair-ment functioning at GMFCS Levels IV and V. All threeoffer circumferential trunk support and fabric or solidpelvic supports.
For this study similarly sized models were selected, the size2 models for the KidWalk and Mustang, and the medium size(K502) Pacer. The KidWalk was configured with standard hipand flip down trunk supports and standard dynamic swivelseat. The Pacer was configured with chest prompt, soft pelvicsupport, ankle, and arm prompts. The Mustang was config-ured with chest support, anterior arm supports, sacral sup-port, and solid seat.
The three gait trainers were tested to compare inertia andthe force needed to initiate gait trainer movement in a for-ward direction on tile and carpet. As shown in Table 1, amounting ring was added to the frame of each gait trainer toattach the cable used to induce motion.
Simulated use of the gait trainers by a child was accom-plished by use of a test dummy set up according to thedimensions and weight distribution of a 4-year-old child(Jensen, 1986; Yokoi & Shibukawa, 1986): head 16.4% (2.31kg); torso 47.3% (6.66 kg); upper extremity 4.6% (0.65 kg perarm); lower extremity 13.6% (1.91 kg per leg) for a totalweight of 43.74 lb (19.86 kg). Weights were attached withVelcro to the relevant body segments to achieve the weightdistribution described above. To prevent the dummy movingwhile tests were in progress, the legs and knees were maderigid with a small wooden stanchion.
Gait trainers were tested on tile and carpeted surfaces in astraight trajectory to determine the effects of surface frictionon initiation force. The coefficients of friction for each surfacewere determined via a testing protocol consistent with wheel-chair ISO 7176–13. A steel block with a standard mass andrubber bottom surface was pulled across the testing surfaces ata fixed speed for a distance of 10 cm, during which the forcegauge connected to the steel block logged the pull force. Thetest was repeated with the block pulled in the opposite
direction over the same surface area and measured forces ofboth trials averaged. The average pull force was then dividedby the weight of the block to obtain the coefficient of kineticfriction for each surface. At 0° angle of inclination, the coeffi-cient of friction was determined to be 0.54 on the tile surfaceand 0.99 on carpet.
It was necessary to obtain the inertia (resistance of anobject to any change in its current state of motion) of thegait trainers under loaded and unloaded conditions. Inertiamust be overcome whenever changing speed and/or directionand is most noticeable when movement is initiated, eitherstraight forward or starting a turn. Two inertia measurementswere made to reflect different types of movement, mass andturning moment of inertia. As an inertial quantity, mass is ameasure of resistance to change in velocity (speed and direc-tion) during translational movements, including movementsforward and/or sideways and/or diagonally in a rectilinearfashion without rotation. Turning or yaw moment of inertiareflects the resistance to change in direction when the gaittrainer rotates. A custom device, the “iMachine” (Eicholtz,Caspall, Dao, Sprigle, & Ferri, 2012) was used to measurethe center of mass (CoM), and turning inertia for each gaittrainer with and without the dummy. The iMachine consistedof three load cells spaced 120° apart on a circular turntable,which allowed for measurement of mass and mass distribu-tion. The rotation of the turntable was damped by springs andits angular position measured by an encoder. During mea-surement, the gait trainer was placed atop a platform thatspanned the load cells and the turntable was perturbed torotate (see Figure 2). The resultant measured natural fre-quency was then combined with the known spring constantand turntable radius to determine turning inertia.
A motorized system was configured to measure the forcerequired to initiate movement of the gait trainers. The systemwas composed of a motor which rotated cable around a 4.5″spindle. The 24V DC motor (Currie Technologies Inc., modelXYD-15A1) was controlled by an Invacare MK IVA controllervia a joystick. The spindle cable was attached to a force gauge(Shimpo FG-3008), which, when pulled, slid smoothly along aseries of linear bearings. A second cable connected the forcegauge to the gait trainers. Real-time force data was transferredto a computer via USB connection.
Figure 1. Gait trainer models (left: Prime engineering KidWalk Size II; center: Rifton Pacer size Medium K502; right: Snug Seat/R82 Mustang Size 2).
138 G. PALEG ET AL.

Prior to each trial, the cable connecting the force gaugewith the gait trainer was pulled taut. The connecting cableswere aligned horizontally to ensure that the gauge measuredthe tension force required to initiate the movement. Gait
trainer casters were aligned in a straight, forward positionfor the pulling tests. Forward alignment was achieved withthe help of caster directional locks that were disengaged priorto each trial. For each trial, the joystick was immediately
Table 1. Anchoring points of the gait trainers.
Gait Trainer Pulling object Comments
Prime Engineering KidWalk Size 2 A horizontal bar was added across the frameso an anchor point could be attached on it; aplastic ring secured with a zip-tie serves asthe anchor point
Rifton Pacer Size Medium K502 A plastic ring secured with a zip-tie to thefront frame bar serves as the anchor point
Snug Seat/R82 Mustang Size 2 A plastic ring secured with a zip-tie to thefront frame bar serves as the anchor point
Figure 2. The “Imachine” (left: KidWalk; center: Pacer; right: Mustang).
ASSISTIVE TECHNOLOGY 139

throttled to the maximum speed and the motor pulled theforce gauge platform for a distance of approximately 58 cm.As assessed by image processing, the acceleration for thesesettings was 0.243 m/s2, and reached a speed of 0.250 m/s.
As shown in Figure 4, for the straight pull-test, the gaittrainer was set up facing the pulling system.
The force gauge data were collected in real-time via a USBconnection to a laptop. The force data were sampled at 10-Hzand stored as both a CSV file and a bitmap image of the time-force plot. The outcome measures of interest were the peakforce and the peak duration. These values were determined bymeans of a MATLAB (Mathworks, Inc.) code, where theapparent span of the peak duration was manually and visuallyselected on the plot. Using this selected time span, the max-imum force magnitude was determined via a native MATLABfunction. In trials where more than one distinct force peakwas measured, only the first peak was selected for data ana-lysis since it is representative of the initiation force of the gaittrainers.
Results
Gait trainer dimensional specifications demonstrate that thegait trainers cover a similar footprint (distance between thewheels from side to side and front to back) while wheel andcaster sizes are distinctly different (see Table 2). The three gaittrainers represent two distinct designs; the Pacer and Mustanghave four casters that can be free-wheeling or directionallyfixed in any combination, while the KidWalk has two smallcasters in the rear, two small “anti-tip” wheels in the front(typically not in contact with the floor), and two large wheelson either side of the child.
Gait trainer load distribution and inertia measurements(see Table 3) indicate that the KidWalk is the heaviest andthe Pacer is the lightest. When unloaded, the distance fromCoM to the front wheels was similar in the three gait trainers,but CoM to front wheel distance was reduced significantly inthe KidWalk when loaded, although it had almost a thirdgreater turning inertia compared with the Pacer andMustang. When loaded, the weight distributions of the Pacerand Mustang were similar with about 60% of the weight onthe front casters. In distinction, in the KidWalk over 85% ofthe weight was on the large wheels.
Overall, the forces required to initiate movement in theloaded gait trainers were fairly low (<45 N) for all conditions(see Table 4). The acceleration phase characterizes the dura-tion over which initiation force was applied. This accelerationphase ranged from 1.2 to 1.349 seconds for straight motion ontile and from 1.446 to 1.518 seconds for straight motion oncarpet. The tight variance of values suggests that forces wereapplied at a consistent acceleration amongst gait trainersacross surfaces. The forces measured on carpet were, onaverage, 34% greater than those on tile. For straight motionon tile, the Mustang required about 20% greater force com-pared with the Pacer and KidWalk. For straight motion oncarpet, both the Mustang and Pacer had similar initiationforces and were around 25% greater than the KidWalk.
Discussion
When choosing a gait trainer for an individual child manyfactors must be considered, including the physical parametersof the device. Inertia and ease of forward movement are justtwo factors in the clinical decision process. Overall the threegait trainers had similar footprints, masses, and support com-ponents, but differed with respect to their frame design,wheels, and casters.
The occupied mass, rotational inertia, weight distribution,and tire design contribute to inertial and frictional
Table 2. Gait trainer dimensional specifications.
Gait trainerDistance between
front and rear wheelsDistance between frontwheels (contact point)
Distance between backwheels (contact point) Diameter of wheel Width of the wheel
Prime EngineeringKidwalk Size 2
27.6 in. (70 cm) 21.6 in. (54.8 cm) 21.9 in. (55.6 cm) Casters: 5 in. (12.7 cm); drivewheels:24 in. (61 cm)
Casters: 1 in. (2.5 cm); drivewheels: 1.5 in. (3.9 cm)
Snug Seat/R82Mustang Size 2
27.3 in. (69.3 cm) 20.3 in. (51.5 cm) 20.9 in. (53 cm) 7.6 in. (19.4 cm) 1.8 in. (4.6 cm)
Rifton Pacer SizeMedium K502
26.1 in. (66.2 cm) 23.6 in. (60 cm) 23.3 in. (59.2 cm) 5.7 in. (14.5 cm) 1.4 in. (3.5 cm)
Figure 3. Pull-test assembly including pulley system for alignment (Pulley A:thread going through pulley A was at the same levels as the force gauge; pulleyB: thread going through pulley A was at the same levels as the pulling object(black ring) at the gait trainer).
Figure 4. Setup of straight pull-test trial.
140 G. PALEG ET AL.

parameters that influence how much force will be requiredto initiate movement. This study measured two inertialproperties, mass and rotational inertia. Rotational inertia isreflective of the distribution of mass around the center of itsbase of support and reflects the resistance to turning aboutthis axis. The wheelbases of the gait trainers were within4 cm of each other and the masses differed by about 6 kg(13 lbs). The Pacer and Mustang are designed with fourcasters while the KidWalk has mid-wheel design. This dif-ference in frame design is manifested by differences inweight distribution and turning inertia. For the Mustangand Pacer designs, the child is placed near the middle ofthe base of support resulting in a fairly balanced weightdistribution of about 60–40. In distinction, the KidWalkwas designed to place the child between the large wheelsresulting in over 85% of weight on these wheels. The greatermass of the KidWalk II and its distribution of mass resultedin a much higher rotational inertia compared to the othertwo models. The force required to initiate a straight trajec-tory was measured experimentally. For all gait trainers underall conditions, initiation forces were less than 45 N. This wasa fairly low force of initiation (around 10 lbs) using a lowacceleration rate. Forces required for maintenance of move-ment would be even lower since inertial influences willdiminish after acceleration. When initiating movement, onemust overcome friction and inertia whereas only frictionmust be overcome once steady-state motion is achieved.The impact of friction was evidenced by the greater forcesrequired to traverse carpet compared to tile floors. Somegeneral inferences can be made concerning how differencesin designs resulted in differences in movement initiationforce.
The medium Pacer and Mustang have similar framedesigns and weight distributions between the front and rearcasters. The medium Pacer has a lower mass and uses smallercaster wheels compared to the Mustang. The initiation forceof the Mustang was 22% greater than the Pacer on tile, but thedifference was only 5% on carpet. The greater mass of theMustang impacts both inertia and friction so can explain thediscrepancy on the tile surface. However, on carpet, the smal-ler and narrower casters of the Pacer increased its rollingresistance a greater amount compared to the Mustang withits larger and wider casters.
The size two KidWalk had two small casters and two fixed24-inch-diameter wheels. These larger wheels accommodatedthe majority of the mass and their large diameter is consistentwith a lower rolling resistance. Despite its greater mass, thisconfiguration led to relatively low forces required to initiatemovement on both surfaces. While all three gait trainersrequired low force to initiate movement, differences existeddepending on surface. Differences in force initiation are dueto the influences in the inertia and friction of the respectivesystems. Mass, frame design, weight distribution, and wheeland caster sizes impact these inertial and frictional parametersand, in combination, accounted for differences in effort forinitiation of movement and maneuverability of the gait trai-ners. The amount of body weight supported by the gait trainerand the location of the trunk support will also impact theforce required for maneuvering. Children that require moresupport from the trainer will, unfortunately, add friction atthe wheels. Positioning the trunk support close to the centerof the gait trainer may reduce the effort required to turnbecause it will reduce the rotational inertia of the occupiedtrainer.
Study limitations and suggestions for future research
This study was limited by the small number of gait trainermodels evaluated, and by the experimental setup. A conve-nience sample of only three gait trainers was selected from acohort of around 15 commercially available options due tofunding and time constraints. Each of the companies offers arange of gait trainer sizes. This study evaluated only one sizefrom each and while they targeted similarly sized children,differences in weight capacity exist. Testing the force requiredto initiate movement necessitated loading the gait trainerswith a dummy. This differs from a clinical setup as thedummy was elevated off the ground whereas gait trainersallow for a wide range of body weight to be borne by thedevice or loaded onto the ground. Because all the dummy’smass was borne by the gait trainer, rolling resistance andinertia were maximized, and the results represent that sce-nario. Finally, tension forces were applied to the gait trainersat a single frame location differing from how forces areapplied by children to initiate movement when in a gaittrainer. The experimental setup did not permit measurement
Table 3. Load distribution and inertia measurements of gait trainers.
Unloaded Loaded
Gait Trainer
Perpendiculardistance betweenfront and rear
wheels MassTurninginertia
Distance fromCoM to front
wheels
Loaddistributionbetween
front and rearwheels (%)
MassTurninginertia
Distance fromCoM to front
wheels
Loaddistributionbetween
front and rearwheels (%)
Front Rear Front Rear
Rifton PacerMedium Size502
2.17 ft (0.66 m) 34.50 lbs(15.63 kg)
0.34 lbft2
(1.65 gm2)9.45 in. (0.24 m) 63.7% 36.3% 78.90 lbs
(35.81 kg)0.41 lbft2
(1.99 kgm2)10.20 in. (0.26 m) 60.7% 39.3%
Snug SeatMustangSize 2
2.26 ft (0.69 m) 41.20 lbs(18.69 kg)
0.34 lbft2
(1.68 kgm2)9.45 in. (0.24 m) 65.4% 34.6% 86.00 lbs
(39.01 kg)lbft2
(1.99 kgm2)11.00 in. (0.28 m) 59.3% 40.7%
PrimeEngineeringKidwalk II
2.30 ft (0.70 m) 25.20 lbs(25.22 kg)
0.43 lbft2
(2.10 kgm2)7.87 in. (0.20 m) 71.1% 28.9% 99.30 lbs
(45.06 kg)0.57 lbft2
(2.79 kgm2)3.94 in. (0.10 m) 85.9% 14.1%
ASSISTIVE TECHNOLOGY 141
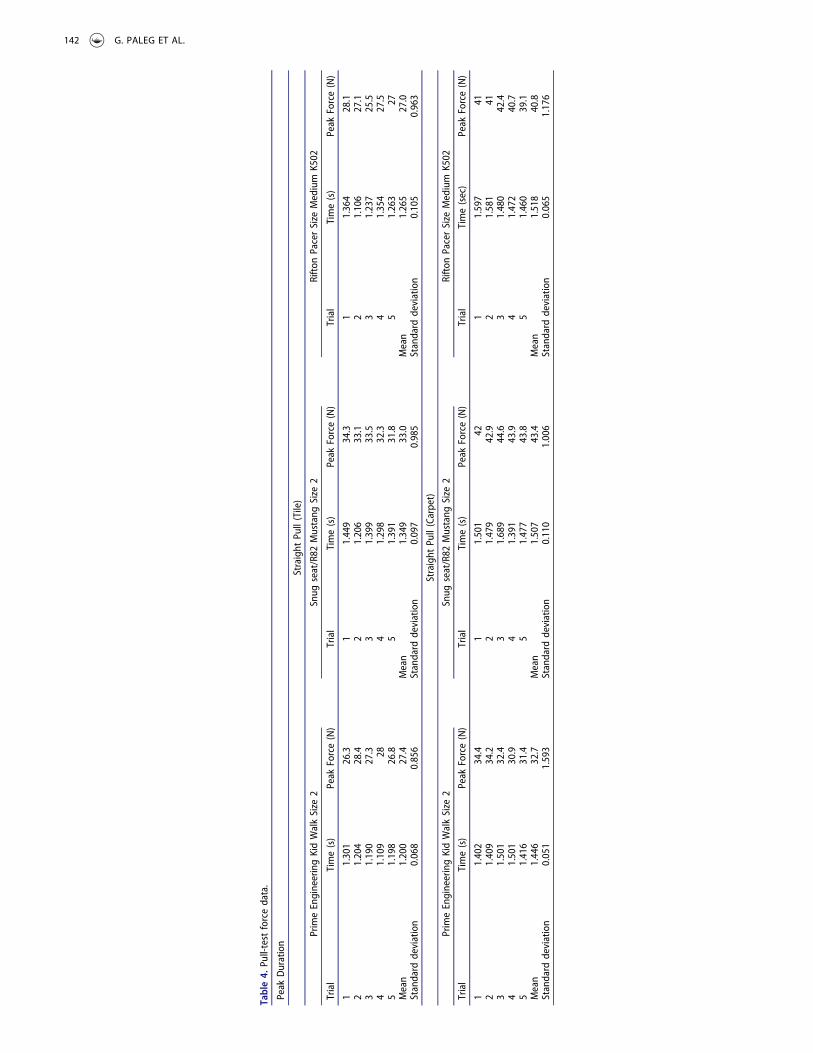
Table4.
Pull-test
forcedata.
Peak
Duration
Straight
Pull(Tile)
PrimeEngineeringKidWalkSize
2Snug
seat/R82
Mustang
Size
2Rifton
PacerSize
Medium
K502
Trial
Time(s)
Peak
Force(N)
Trial
Time(s)
Peak
Force(N)
Trial
Time(s)
Peak
Force(N)
11.301
26.3
11.449
34.3
11.364
28.1
21.204
28.4
21.206
33.1
21.106
27.1
31.190
27.3
31.399
33.5
31.237
25.5
41.109
284
1.298
32.3
41.354
27.5
51.198
26.8
51.391
31.8
51.263
27Mean
1.200
27.4
Mean
1.349
33.0
Mean
1.265
27.0
Standard
deviation
0.068
0.856
Standard
deviation
0.097
0.985
Standard
deviation
0.105
0.963
Straight
Pull(Carpet)
PrimeEngineeringKidWalkSize
2Snug
seat/R82
Mustang
Size
2Rifton
PacerSize
Medium
K502
Trial
Time(s)
Peak
Force(N)
Trial
Time(s)
Peak
Force(N)
Trial
Time(sec)
Peak
Force(N)
11.402
34.4
11.501
421
1.597
412
1.409
34.2
21.479
42.9
21.581
413
1.501
32.4
31.689
44.6
31.480
42.4
41.501
30.9
41.391
43.9
41.472
40.7
51.416
31.4
51.477
43.8
51.460
39.1
Mean
1.446
32.7
Mean
1.507
43.4
Mean
1.518
40.8
Standard
deviation
0.051
1.593
Standard
deviation
0.110
1.006
Standard
deviation
0.065
1.176
142 G. PALEG ET AL.

of turning initiation forces. Measuring this force in a standar-dized fashion is complicated by the need to raise the dummyoff the ground and the need to generate a turning torque in amanner that reflects clinical use.
In a home or limited space environment, maneuvering agait trainer involves backing up, turning in multiple direc-tions, and curving turns. The forward pull-tests completed donot address these trajectories. Future research should includeadditional tests of maneuverability that can be completed for alarger sample of gait trainer models, and a greater variety ofdirections and surfaces. Studies that compare results for thesame child in different devices would also be beneficial.
Conclusion
This study compared a convenience sample of three gait trainerscommonly used with children functioning at GMFCS levels IVand V. The Prime Engineering KidWalk, Rifton Pacer, and SnugSeat Mustang were compared in a laboratory setting. Tests werecompleted with and without a weighted dummy to compareinertial forces required to initiate movement on tile or carpet.On testing, the Pacer and KidWalk moved most easily on a tiledsurface, whereas the KidWalk moved most easily on carpet. Thisinitial study comparing initiation forces and inertia of com-monly prescribed gait trainers may provide added informationfor clinicians to consider when selecting a device for their clients.
Disclosure
Author 1 (GP) is a paid educational consultant for PrimeEngineering (manufacturer of the KidWalk). Over the last 20years she has also been a paid consultant for Rifton (manufacturerof the Pacer) and Snug Seat (manufacturer of the Mustang). Theremaining authors have no conflicts of interest to disclose.
Acknowledgments
GP initiated the idea and designed and conducted the study with theassistance of SVG and MH at the Rehabilitation Engineering and AppliedResearch Laboratory at Georgia Institute of Technology. MH wrote theinitial draft of the methods and results while SS clarified technical detailand helped refine these sections. RL wrote the initial draft of the introduc-tion and GP wrote the initial draft of the discussion. GP and RL edited andrefined the paper and converted it to a form suitable for publication.
ORCID
Stephen Sprigle http://orcid.org/0000-0003-0462-0138
References
Anderson, D. I., Campos, J. J., Witherington, D. C., Dahl, A., Rivera, M.,He, M., & Barbu-Roth, M. (2013). The role of locomotion in
psychological development. Frontiers in Psychology, 4, 440.doi:10.3389/fpsyg.2013.00440
Brown, D. (1979). Standing walker for the weak, ataxic, or cerebralpalsied adult. Physical Therapy, 59(3), 296–301. Retrieved fromhttp://www.ncbi.nlm.nih.gov/pubmed/419175
Eicholtz, M., Caspall, J., Dao, P., Sprigle, S., & Ferri, A. (2012). Testmethod for empirically determining inertial properties of manualwheelchairs. The Journal of Rehabilitation Research andDevelopment, 49(1), 51–62. doi:10.1682/JRRD.2011.03.0045
Eisenberg, S., Zuk, L., Carmeli, E., & Katz-Leurer, M. (2009).Contribution of stepping while standing to function and secondaryconditions among children with cerebral palsy. Pediatric PhysicalTherapy, 21(1), 79–85. doi:10.1097/PEP.0b013e31818f57f2
Eve, L. (1982). The Cheyne Walker. Physiotherapy, 68(3), 76.Hanna, S. E., Rosenbaum, P. L., Bartlett, D. J., Palisano, R. J., Walter, S.
D., Avery, L., & Russell, D. J. (2009). Stability and decline in grossmotor function among children and youth with cerebral palsy aged 2to 21 years. Developmental Medicine & Child Neurology, 51(4), 295–302. doi:10.1111/j.1469-8749.2008.03196.x
Jensen, R. K. (1986). Body segment mass, radius and radius of gyrationproportions of children. Journal of Biomechanics, 19(5), 359–368.doi:10.1016/0021-9290(86)90012-6 Retrieved from http://www.ncbi.nlm.nih.gov/pubmed/3733761
Lancioni, G. E., Singh, N. N., O’Reilly, M. F., Sigafoos, J., Didden, R.,Manfredi, F., & Basili, G. (2009). Fostering locomotor behavior ofchildren with developmental disabilities: An overview of studiesusing treadmills and walkers with microswitches. Research inDevelopmental Disabilities, 30(2), 308–322. doi:10.1016/j.ridd.2008.05.002
Lepage, C., Noreau, L., & Bernard, P. (1998). Association between char-acteristics of locomotion and accomplishment of life habits in childrenwith cerebral palsy. Physical Therapy, 78(5), 458–469. Retrieved fromhttp://www.ncbi.nlm.nih.gov/pubmed/9597060
Low, S. A., McCoy, S. W., Beling, J., & Adams, J. (2011). Pediatricphysical therapists’ use of support walkers for children with disabil-ities: A nationwide survey. Pediatric Physical Therapy, 23(4), 381–389.doi:10.1097/PEP.0b013e318235257c
Mathis, H. (1975). Adaptive walker for child with cerebral palsy. PhysicalTherapy, 55(12), 1344–1345.
Meadows, C., Meyerink, J., Farley, R., & Gilmour, A. (1992). The ArrowWalker. Physiotherapy, 78(9), 679–680. doi:10.1016/S0031-9406(10)61578-7
Munroe, J. (1973). Walkers adapted for the handicapped child. PhysicalTherapy, 53(8), 868–870.
Paleg, G., & Livingstone, R. (2015). Outcomes of gait trainer use in homeand school settings for children with motor impairments : A systema-tic review. Clinical Rehabilitation, 29, 1077–1091. doi:10.1177/0269215514565947
Palisano, R., Rosenbaum, P., Walter, S., Russell, D., Wood, E., & Galuppi,B. (2008). Development and reliability of a system to classify grossmotor function in children with cerebral palsy. DevelopmentalMedicine & Child Neurology, 39(4), 214–223. doi:10.1111/dmcn.1997.39.issue-4. Retrieved from http://onlinelibrary.wiley.com/doi/10.1111/j.1469-8749.1997.tb07414.x/abstract
Van Der Putten, A., Vlaskamp, C., Reynders, K., & Nakken, H. (2005).Children with profound intellectual and multiple disabilities: Theeffects of functional movement activities. Clinical Rehabilitation, 19(6), 613–620. doi:10.1191/0269215505cr899oa
Yokoi, T., & Shibukawa, M. (1986). Body segment parameters ofJapanese children. Japanese Journal of Special Education, 31(1), 53–66. Retrieved from http://dsa.htc.nagoya-u.ac.jp/reference/yokoi_85.pdf
ASSISTIVE TECHNOLOGY 143

![Robust Gait Recognition by Integrating Inertial and RGBD ...gait features can be derived for gait recognition [12]–[14]. However, in practice depth data may contain noise and errors,](https://img.pdfslide.net/doc/110x75/602a568ec673175d0b65fff4/robust-gait-recognition-by-integrating-inertial-and-rgbd-gait-features-can-be.jpg)


























