Embed Size (px)
Citation preview
39
COMPATIBILIDADE ELETROMAGNÉTICA EM MICROCONTROLADORES CLP
Fabio Jose Santos Pinto¹ [email protected]
Gilberto Luiz de Souza [email protected]
ProfºLaerte Edson Nunes²
Abstract – The constant search to make automated processes more accessible, the
modules industrial microcontrollers PLCs, effective and low cost may compete with the
traditional PLCs, a breakthrough for the industry and households, which justifies the choice
of the theme for the accomplishment of the article electromagnetic compatibility modules
microcontrollers, CLP PIC, for its relevance in the context of science and modern
technologies, and market access. The research for the preparation of the paper is
theoretically grounded in the written and electronic documents and work done before. As
methodology, utilized a prototype, through the microcontroller module, to automate an
aquarium, for its flexibility in accepting language programming and low cost, however, so that
it can replace components already present, which is the case for traditional industrial CLP,
you must enter them in both the industrial and residential environment, with less
electromagnetic disturbance because incompatibility can interfere with equipment
performance, forcing the use of screens or filters, which directly interfere in its cost. The work
aims to automate an aquarium, in the absence of the owners allows the maintenance by a
program developed in ladder language, through LDmicro recorded in CLP PIC Flexis II, with
aletromagnetica compatibility radiated or conducted, checking trust boundaries to an
effectively and safely function.
Keywords: Automation. Electromagnetic Compatibility. Microcontrollers.
Resumo - A constante busca para tornar os processos automatizados mais acessíveis, os módulos microcontroladores industriais CLPs, eficazes e debaixo custo, poderão competir comos CLPs tradicionais, um avanço para as indústrias e residências, o que justifica a escolha do tema para a realização do artigo, compatibilidade eletromagnética dos módulos microcontroladores, CLP PIC, por sua relevância no âmbito da ciência e das tecnologias modernas, e o acesso ao mercado. A pesquisa para a elaboração do artigo está fundamentada teoricamente nos documentos escritos e eletrônicos e em trabalhos realizados anteriormente.Como metodologia, utilizou-se um protótipo,por meio do módulo microcontrolador, para a automação de um aquário, por sua flexibilidade na aceitação de linguagem de programação e baixo custo, porém, para que este possa substituir componentes já consagrados, que é o caso do CLP industrial tradicional, deve-se inseri-los tanto no ambiente industrial como residencial, com menor perturbação eletromagnética, pois a incompatibilidade pode interferir no desempenho dos equipamentos, obrigando a utilização de blindagens ou filtros, os quais interferem diretamente em seu custo. O trabalho objetiva automatizar um aquário, que na ausência dos proprietários possibilita a manutenção, por um programa elaborado em linguagem ladder, através do LDmicro gravado no CLP PIC flexis II, que com a compatibilidade eletromagnética, irradiada ou conduzida, checam limites confiáveis, para o funcionamento com eficácia e segurança.
Palavras-chave: Automação.Compatibilidade Eletromagnética. Microcontroladores.
40
1 INTRODUÇÃO
A evolução da automação está relacionada, principalmente, ao desenvolvimento da microeletrônica que ocorreu nesses ultimo anos. Controlador Lógico Programável (CLPs) com origem nos anos1960, tinham a finalidade de substituir os painéis de cabina de controle com relés,proporcionando economia de energia, simplificando a manutenção e alteração de comandos e de fiação (NATALE 2000).
Com a persistência de alguns problemas, estes foram detectados de forma intensa na indústria automobilística, pois com o lançamento anual de novos modelos, o sucateamento de vários painéis era inevitável, causando assim um aumento de custos, gerando alterações maiores do que a implementação de novos painéis. Nos últimos anos, com a evolução tecnológica nos "hardware" e nos "software", conclui-se que o CLPs avançou para um conceito de controlador universal de processos, pois, com determinadas configurações consegue-se suprir as necessidades de controle de processos acustos mais atraentes.
Na atualidade, pode-se encontrar CLPs utilizados na instalação de controle de malhas, painéis seqüenciais de intertravamento, sistemas de controle de células de manufatura, de controle de estações, de controle estatístico de processo, entre outros. Os CLPs podem ser encontrados nos processos de controle de: transporte e manuseio de materiais, ou seja, diversas tarefas automatizadas, tanto na indústria, como em sistemas de controle predial.
Os microcontroladores PIC pertencem à família de microcontroladores de fabricação da Microchiptechnology, estruturado internamente tipo Havard, e suas instruções são do tipo RISC,possuem barramento de dados de 8 bits e o barramento de instruções são de 12, 14 e 16 bits variando de acordo com o modelo do microcontrolador. Esta arquitetura permite que uma nova instrução seja buscada, no momento que outra instrução estiver sendo executada, realizando o processamento mais rápido. A vantagem de barramento de instruções maior que o barramento de dados é possuir o dado e o endereço onde irá operar, ocupando apenas uma posição na memória, economizando espaço na memória do programa (SOUZA, 2000).
De acordo com Gimenez (2002), o microcontrolador possui um sistema de computador completo em um único circuito integrado, podendo ser considerado como um computador de um único chip, ou seja, comporta um sistema completo, com uma Unidade Central Processamento (CPU), memória de dados e programa, clock, portas de I/O (Input/Output) e periféricos. Módulos de temporizador e conversores A/D e D/A, vários integrados compondo um mesmo componente.
O controle, do ponto de vista da automação, realiza importante papel na elaboração de ações planejadas, por meio de processos, dos mais simples aos mais complexos.
41
Para Kheiret al. (1996), um sistema de controle e automação necessita de uma integração harmoniosa com o meio onde será instalado, para ser bem sucedido.
Segundo Cetinkunt (2008), no sistema elétrico existem dois tipos de campos: elétricos (gerado por cargas estáticas) e os magnéticos, também denominados de campos eletromagnéticos (gerados por cargas em movimento). Em eletromagnetismo a corrente produz o campo magnético.
A lei de Faraday diz que a variação do fluxo magnético induz uma tensão (FEM), força eletro motriz no circuito atingido por ele, ex: transformador corrente CA no primário provoca fluxo magnético variável direcionado para o secundário, através do núcleo de ferro onde induz uma tensão de saída. No momento em que o circuito é ligado à variação do fluxo magnético, vai gerar uma força contra-eletromotriz se opondo à variação (CARRON, GUIMARÃES 2003).
2 JUSTIFICATIVA
A confecção de um aquário automatizado, com a utilização de um Kit de microcontrolador, demandou a necessidade de testes de interferências eletromagnéticas, com a possibilidade de orientar os profissionais da área de mecatrônica, para a utilização deste tipo de controlador com baixo custo em ambiente industrial. O objetivo do experimento é verificar, se o equipamento sofre ou causa interferência eletromagnética no ambiente que foi instalado. O desenvolvimento do aquário automatizado foi para suprir as necessidades básicas de seus usuários, com pouca intervenção do ser humano, justificando sua relevância para o desenvolvimento da pesquisa.
3 PROTÓTIPO FUNCIONAL
O objetivo do procedimento é orientar a utilização dos Kits CLPs PIC, em ambiente industrial, para implementação de controladores industriais, com baixo custo, e imune às interferências inerentes ao processo industrial. O controle CLP PIC é um kit que utiliza um microcontrolador da família PIC, que simula um controlador lógico programável, com custo reduzido.
Originalmente o projeto foi desenvolvido utilizando um CLP. Contudo, para minimizar o custo, utilizou-se um Kit de microcontrolador disponível no mercado, com o objetivo de substituir o CLP, inclusive em aplicações industriais. Apesar do sistema de automação do aquário ser utilizado em ambiente residencial, esta pesquisa efetuou testes com o Kit em ambiente industrial, para verificar se o seu comportamento sofre interferências dos espúrios e também eletromagnéticas, presentes nas instalações industriais.
O controle CLP PIC foi utilizado para automatização de um aquário, que na presença de luz, o sensor óptico aciona o CLP PIC flexis II, trata por dois segundo, aciona uma bomba de ar por 15 segundos e aciona a bomba centrífuga por 20
42
segundos, e logo após inicia-se uma pausa de 15 segundos; repete o ciclo, e caso a temperatura diminua para 20°C, aciona-se o aquecedor e a bomba centrífuga, desliga o ar, ao atingir 30°C, desliga o aquecedor, mantendo a temperatura, e retorna ao ciclo anterior, filtragem e ar; já o tratador é acionado somente quando o sensor de luz for ligado, realizando todas as funções necessárias para a manutenção do aquário, por um período pré-estipulado, enquanto houver alimento no reservatório.
4 MATERIAIS E MÉTODOS
4.1 Sensores ópticos
As fotos resistências, light dependent resistors (LDR) são resistências elétricas, cujo valor de sua resistência depende da intensidade luminosa que nelas incide. As fotoresistências são produzidas com um material fotocondutor. Os materiais fotocondutores, quando na ausência de luz, contêm poucos eletros livres, tornando um mal condutor. Ao serem iluminados, com absorção de luz, os elétrons vão se libertando dos átomos e o material fica mais condutor, conforme figura 1.
Figura 1- Sensor ldr
Fonte: Ebah (2013).
4.1.2 Termostato
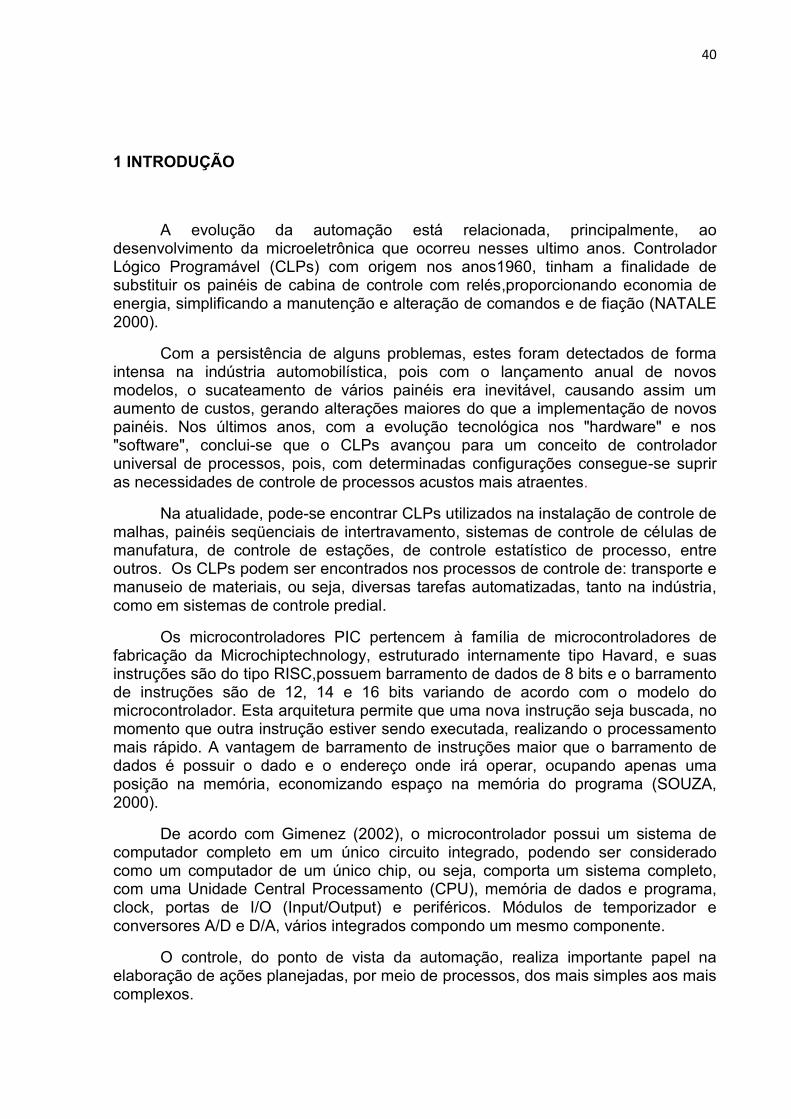
O termostato é um dispositivo desenvolvido para manter a temperatura de um determinado ambiente, por meio de regulação automática. Segundo Ferraz Netto (1999), o bimetal é formado por de duas lâminas de metais, com coeficiente de dilatação diferente, sobreposto e unido em alta temperatura, ou soldado no ponto. Aproveitando o efeito desses coeficientes de dilatação diferentes, ao aquecer as lâminas, expande de forma diferente, provocando uma curvatura nas mesmas, tornando possível sua utilização como chave em circuitos elétricos, conforme ilustrado figura 2.
Figura 2-Termostato

43
Fonte: Mecatronicaatual (2013).
4.1.3 Bomba Centrífuga
Bomba centrífuga é uma máquina muito utilizada para transportar líquidos
para níveis elevados utilizando das leis da física sobre os líquidos: muito utilizada no saneamento básico, na irrigação de lavouras, nos edifícios residenciais, na indústria em geral, conforme figura 3.
.
Figura 3-Bomba centrífuga
Fonte: Aquarioreef (2013).
4.1.4 Compressor de ar
A funçao do compressor de aré impulsionar o ar dentro da água, que absorve parte do oxigenio excencial, para que os peixes sobrevivam.Realiza esse trabalho transfomando frequencia eletromagnética da rede, em movimentos mecânicos, através de eletroimãs.
O compressor possui uma chapa de ferro doce, que é atraída pelo eletroímã e volta à sua posiçao inicial, por uma mola, transformando a frequencia do eletroimã em movimentos mecânicos, conforme figura 4.
Figura 4-Compressor de ar
: Fonte:Aquaking (2013)
44
4.1.5 Aquecedor
São equipamentos elétricos desenvolvidos para aquecer a água, providos de
uma resistência interna, a qual realiza o aquecimento. Localizada dentro de um tubo de vidro, que submerso elevará a temperatura por contato da superfície do vidro com a água, conforme figura 5.
Figura 5- Aquecedor
Fonte: SOSanimal(2013).
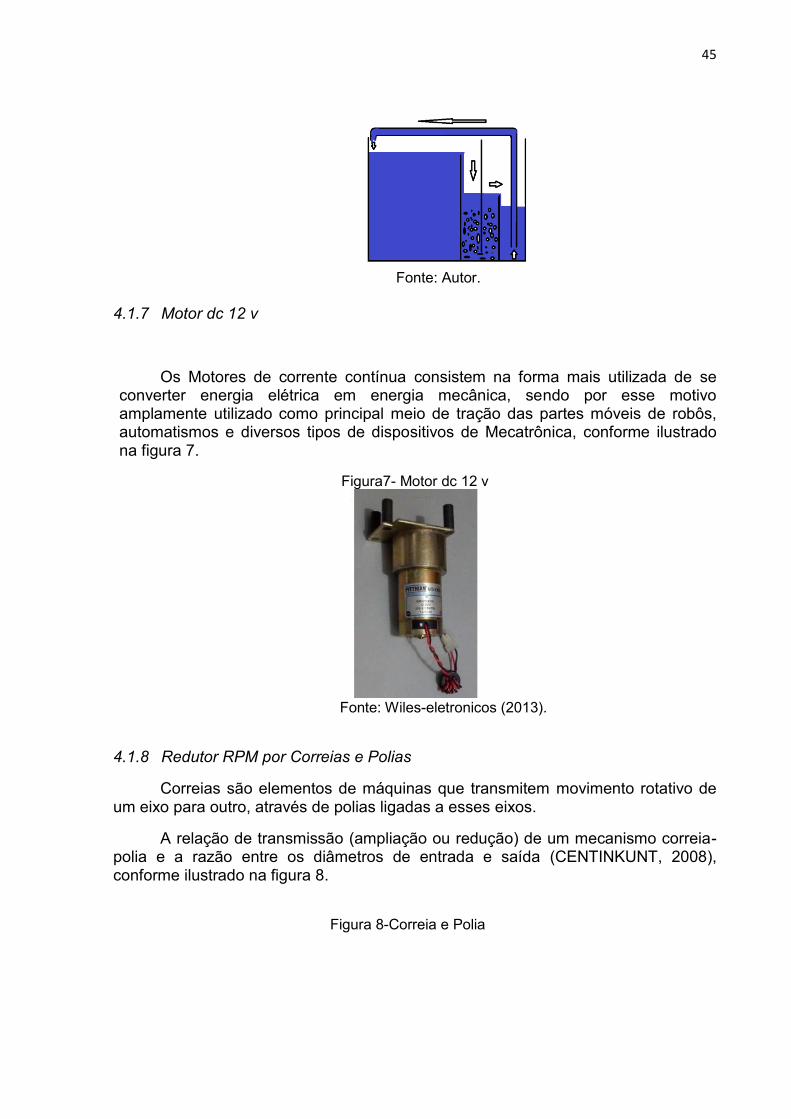
4.1.6 Filtro
A importância de um filtro em um ecossistema, como um aquário, onde são diariamente introduzidos material orgânico (alimentos, plantas, peixes, micro-organismos, etc.), os alimentos e nutrientes consumidos pelos seres vivos, tem a função de retirar os dejetos poluidores que se acumulam ao longo do tempo, o que poderia provocar um desequilíbrio orgânico, físico e químico, poluindo gradativamente a água com substâncias nocivas (nitritos, nitratos, amônia, fosfatos...), povoando com algas indesejáveis, com o pH alterado, conforme ilustrado na figura 6.
Figura 6 - Modelo do Filtro.
45
Fonte: Autor.
4.1.7 Motor dc 12 v
Os Motores de corrente contínua consistem na forma mais utilizada de se converter energia elétrica em energia mecânica, sendo por esse motivo amplamente utilizado como principal meio de tração das partes móveis de robôs, automatismos e diversos tipos de dispositivos de Mecatrônica, conforme ilustrado na figura 7.
Figura7- Motor dc 12 v
Fonte: Wiles-eletronicos (2013).
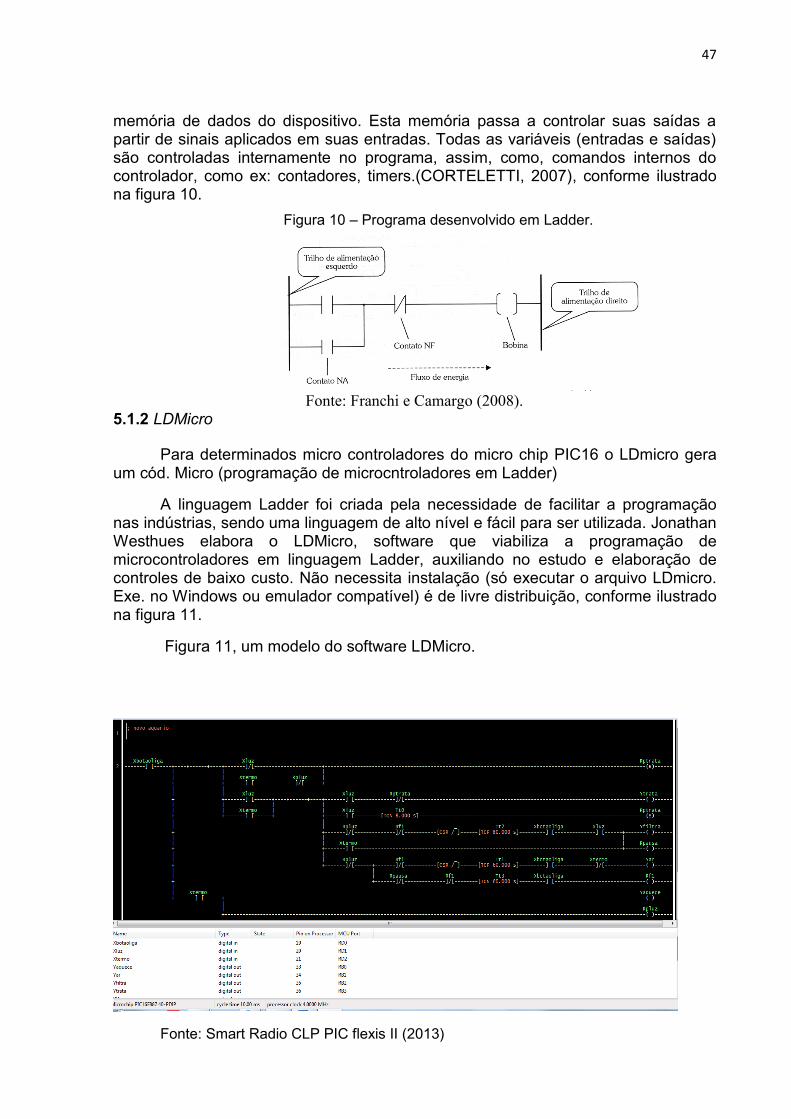
4.1.8 Redutor RPM por Correias e Polias
Correias são elementos de máquinas que transmitem movimento rotativo de um eixo para outro, através de polias ligadas a esses eixos.
A relação de transmissão (ampliação ou redução) de um mecanismo correia-polia e a razão entre os diâmetros de entrada e saída (CENTINKUNT, 2008), conforme ilustrado na figura 8.
Figura 8-Correia e Polia
46
Fonte: UOL Educação (2013).
5 CLP PIC FLEX II
CLP de baixo custo para uso industrial, controle de máquinas e equipamentos, Automação Predial/ Residencial, foram projetados para trabalhar com várias linguagens de programação e compiladores, como: linguagem Ladder do LDMicro.
O Hardware pode ser programado sem a necessidade de gravador dedicado de PIC por meio do software TinyBootLoader e com ao conector Serial RS232 DB9 da placa (ou conversores USB/Serial); com modo de Expansão padrão UEXT, PL15 tem IOsSpi, I2C e serial do PIC possibilitando conexões com placas opcionais extras,disponibilizando conexão com rede e internet, placa de RTC (Real Time Clock), Expansão de IOs, Comunicação via ZigBee, Cartão de Memória, etc. Funções de placas de expansão, só serão ser acessíveis via linguagem C e Assembly, com 8 entradas onde 6 digitais optoacopladas e 2 entradas analógicas configuração (0-5Volts/0-10Volts/4-20mA) e 6 saídas por Relé com LEDs de indicação cada e uma saída tipo PWM, alimentação de 12Volts x 300mA, conforme ilustrado na figura 9.
Figura 9- CLP PIC flexis II
Fonte: Smart Radio (2013).
5.1 Linguagem Ladder
O Ladder (escada) é uma linguagem de programação, que utiliza diagrama elétrico, de fácil compreensão, por estudantes e técnicos que atuam na área da eletricidade. Esta linguagem apresenta as ligações entre os componentes (sensores e atuadores) que são conectados em suas entradas e saídas, que são gravados
47
memória de dados do dispositivo. Esta memória passa a controlar suas saídas a partir de sinais aplicados em suas entradas. Todas as variáveis (entradas e saídas) são controladas internamente no programa, assim, como, comandos internos do controlador, como ex: contadores, timers.(CORTELETTI, 2007), conforme ilustrado na figura 10.
Figura 10 – Programa desenvolvido em Ladder.
Fonte: Franchi e Camargo (2008).
5.1.2 LDMicro
Para determinados micro controladores do micro chip PIC16 o LDmicro gera um cód. Micro (programação de microcntroladores em Ladder)
A linguagem Ladder foi criada pela necessidade de facilitar a programação nas indústrias, sendo uma linguagem de alto nível e fácil para ser utilizada. Jonathan Westhues elabora o LDMicro, software que viabiliza a programação de microcontroladores em linguagem Ladder, auxiliando no estudo e elaboração de controles de baixo custo. Não necessita instalação (só executar o arquivo LDmicro. Exe. no Windows ou emulador compatível) é de livre distribuição, conforme ilustrado na figura 11.
Figura 11, um modelo do software LDMicro.
Fonte: Smart Radio CLP PIC flexis II (2013)
48
6 CAMPO ELETROMAGNÉTICOS
Campos eletromagnéticos (CEM) existem na natureza e esta presente sempre na Terra. Porém, no decorrer do século vinte, devido ao aumento do consumo de energia elétrica, a exposição ambiental de fontes de campo eletromagnético desenvolvidos pelo homem teve um aumento considerável devido à necessidade de energia elétrica, varias tecnologias em constante desenvolvimento e evolução, alterações nas práticas profissionais e no comportamento social. Expondo todos a uma mistura de vários campos elétricos e magnéticos com freqüências diferentes, em casas e indústrias.
O espectro eletromagnético, que inclui toda variação de freqüências existente, pode ser separado em: região ionizante (campos com energia suficiente para danificar o DNA),e outra não ionizante (campos não possuem energia suficiente para danificar o DNA). Os campos da região não ionizante podem-se dividir.
Campos eletromagnéticos estáticos são de baixas-frequências (BF), suas fontes mais comuns são aparelhos eletrodomésticos, computadores e linhas de transmissão, campos de altas freqüências ou de radio freqüências, suas fontes mais comuns são principalmente radares, emissoras de rádio e TV, celulares, estações rádio base, equipamentos indutivos e alarmes.
Campos eletromagnéticos naturais são produzidos pela Terra, por radiação solar e por atividade atmosférica durante relâmpagos.
Campos eletromagnéticos artificiais são produzidos através linhas de transmissão, distribuição de energia, transportes movidos a eletricidade, sistemas de segurança, radio e TV,celulares e estações rádio-base, transmissão de dados por microondas, microondas, radares,demais equipamentos elétricos e eletrônicos.
O eletromagnetismo, gerado naturalmente pela terra, é composto por fontes intencionais e não-intencionais podem interferir no desempenho de vários equipamentos elétricos e eletrônicos. Esta interferência pode ser da forma irradiada pelo espaço ou como de forma conduzida através dos cabos de alimentação, controle de dados. (Pena et al., 2001).
Interferência por condução: este tipo de interferência ocorre nas conexões físicas elétricas diretas entre a fonte (emissor) de energia eletromagnética e o equipamento influenciado por essa energia eletromagnética
Interferência por Indução: este tipo de interferência ocorre através das conexões capacitivas ou indutivas, quando equipamento influenciado se localiza próximo do campo eletromagnético (acoplamento indutivo), ou quando cabos excessivamente longos, colocados em paralelo e conectados à equipamentos diferentes (acoplamento capacitivo).
Interferência por Radiação: este tipo de interferência ocorre através da propagação de ondas eletromagnéticas, através do espaço, ou através do ar.Onde são emitidas pela fonte e recebidas por um cabo ou outro condutor no equipamento influenciado,
49
funcionando como se fosse uma antena e podem estar localizados distantes um do outro (ALMEIDA, 2003, grifo nosso).
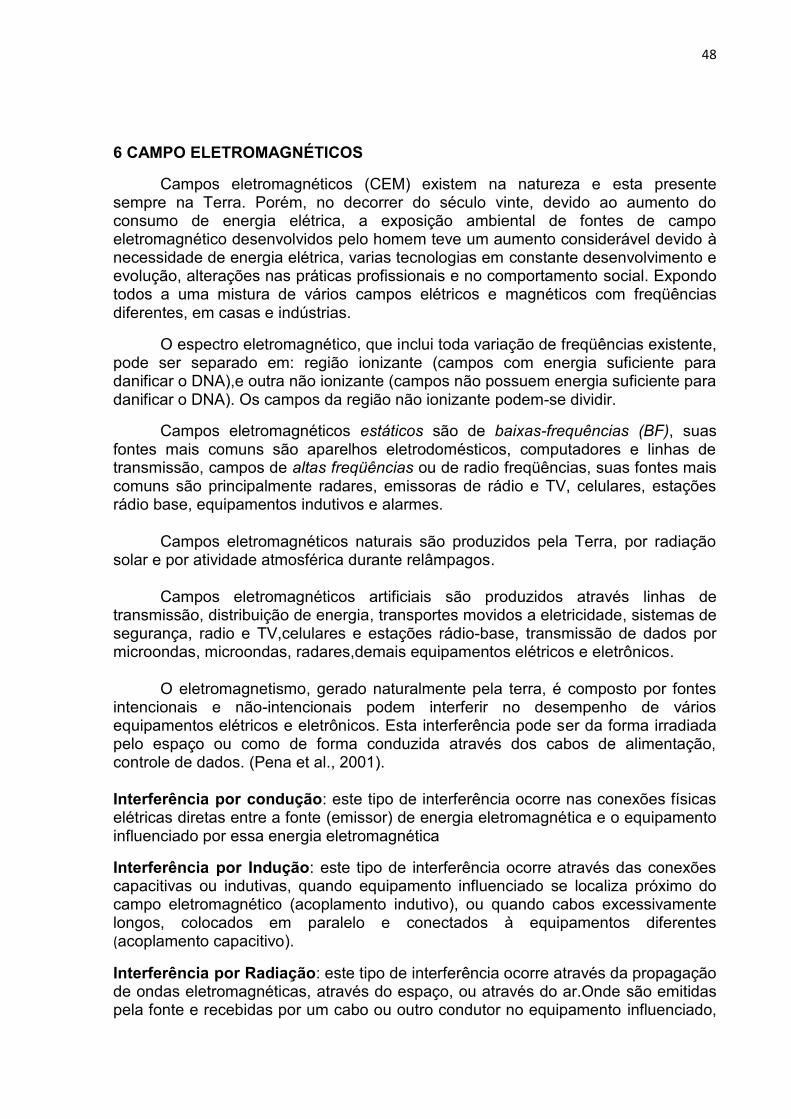
O aumento das rádios transmissões, a evolução de componentes eletrônicos tornando-os mais rápidos e o desenvolvimento de componentes com correntes mais baixas, são fatores que agravam a sensibilidade dos sistemas eletrônicos em relação à poluição eletromagnética, conforme ilustrado na figura 12.
Figura 12 -Interferência por condução
Fonte: Instituto Newton C. Braga (2013).
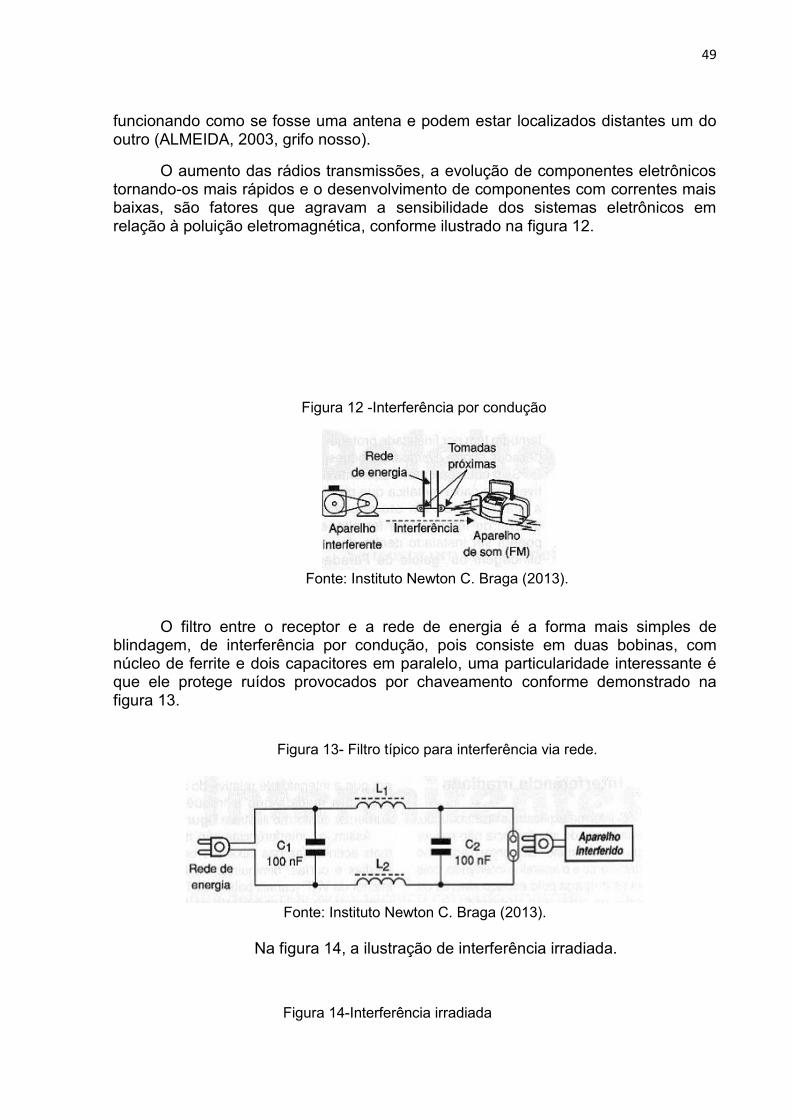
O filtro entre o receptor e a rede de energia é a forma mais simples de blindagem, de interferência por condução, pois consiste em duas bobinas, com núcleo de ferrite e dois capacitores em paralelo, uma particularidade interessante é que ele protege ruídos provocados por chaveamento conforme demonstrado na figura 13.
Figura 13- Filtro típico para interferência via rede.
Fonte: Instituto Newton C. Braga (2013).
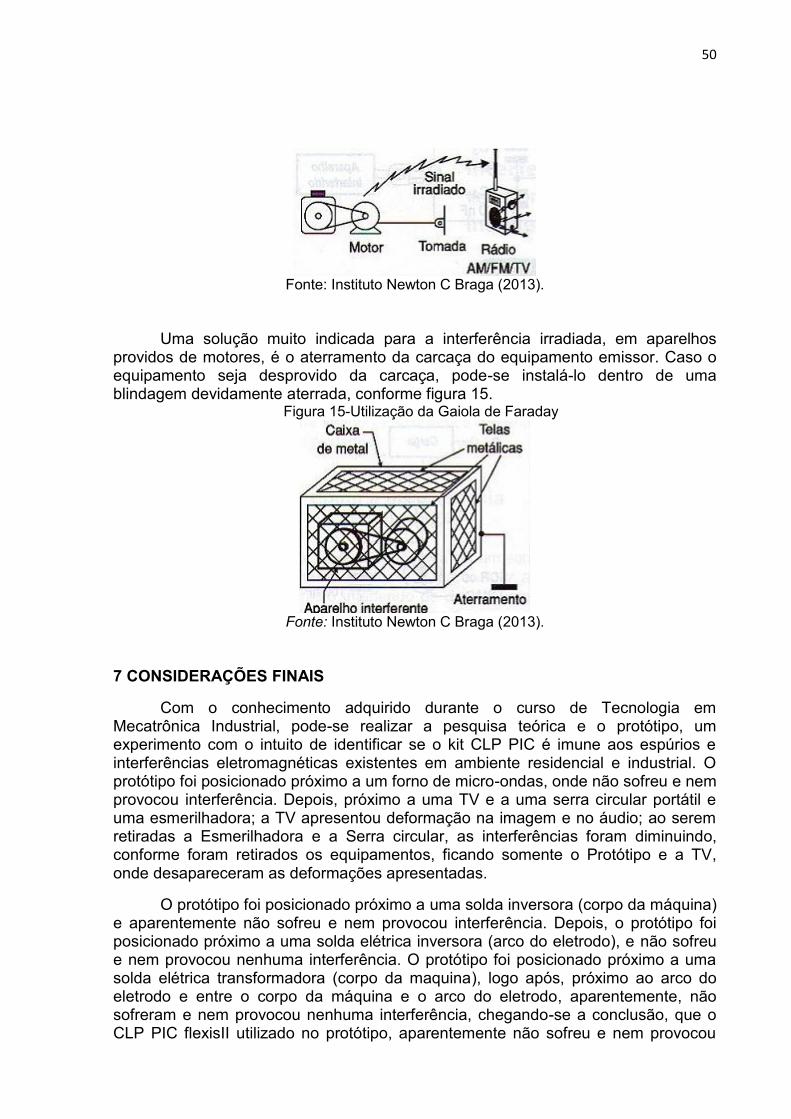
Na figura 14, a ilustração de interferência irradiada.
Figura 14-Interferência irradiada
50
Fonte: Instituto Newton C Braga (2013).
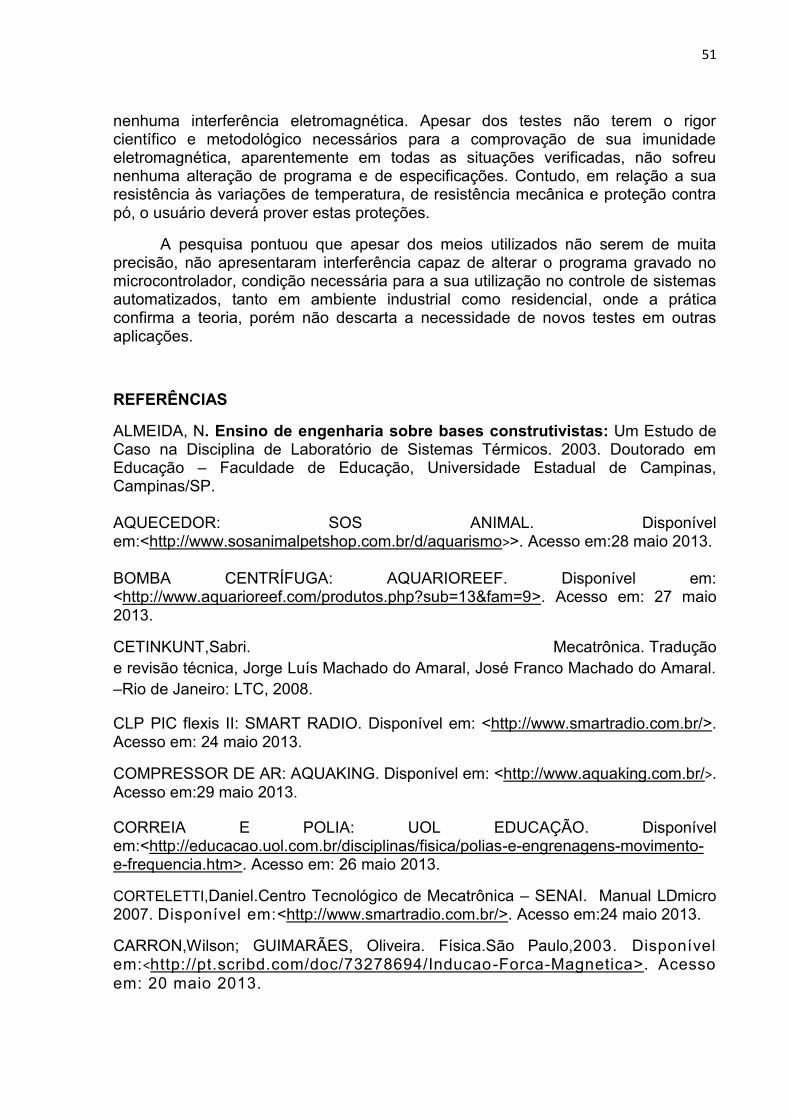
Uma solução muito indicada para a interferência irradiada, em aparelhos providos de motores, é o aterramento da carcaça do equipamento emissor. Caso o equipamento seja desprovido da carcaça, pode-se instalá-lo dentro de uma blindagem devidamente aterrada, conforme figura 15.
Figura 15-Utilização da Gaiola de Faraday
Fonte: Instituto Newton C Braga (2013).
7 CONSIDERAÇÕES FINAIS
Com o conhecimento adquirido durante o curso de Tecnologia em Mecatrônica Industrial, pode-se realizar a pesquisa teórica e o protótipo, um experimento com o intuito de identificar se o kit CLP PIC é imune aos espúrios e interferências eletromagnéticas existentes em ambiente residencial e industrial. O protótipo foi posicionado próximo a um forno de micro-ondas, onde não sofreu e nem provocou interferência. Depois, próximo a uma TV e a uma serra circular portátil e uma esmerilhadora; a TV apresentou deformação na imagem e no áudio; ao serem retiradas a Esmerilhadora e a Serra circular, as interferências foram diminuindo, conforme foram retirados os equipamentos, ficando somente o Protótipo e a TV, onde desapareceram as deformações apresentadas.
O protótipo foi posicionado próximo a uma solda inversora (corpo da máquina) e aparentemente não sofreu e nem provocou interferência. Depois, o protótipo foi posicionado próximo a uma solda elétrica inversora (arco do eletrodo), e não sofreu e nem provocou nenhuma interferência. O protótipo foi posicionado próximo a uma solda elétrica transformadora (corpo da maquina), logo após, próximo ao arco do eletrodo e entre o corpo da máquina e o arco do eletrodo, aparentemente, não sofreram e nem provocou nenhuma interferência, chegando-se a conclusão, que o CLP PIC flexisII utilizado no protótipo, aparentemente não sofreu e nem provocou
51
nenhuma interferência eletromagnética. Apesar dos testes não terem o rigor científico e metodológico necessários para a comprovação de sua imunidade eletromagnética, aparentemente em todas as situações verificadas, não sofreu nenhuma alteração de programa e de especificações. Contudo, em relação a sua resistência às variações de temperatura, de resistência mecânica e proteção contra pó, o usuário deverá prover estas proteções.
A pesquisa pontuou que apesar dos meios utilizados não serem de muita precisão, não apresentaram interferência capaz de alterar o programa gravado no microcontrolador, condição necessária para a sua utilização no controle de sistemas automatizados, tanto em ambiente industrial como residencial, onde a prática confirma a teoria, porém não descarta a necessidade de novos testes em outras aplicações.
REFERÊNCIAS
ALMEIDA, N. Ensino de engenharia sobre bases construtivistas: Um Estudo de Caso na Disciplina de Laboratório de Sistemas Térmicos. 2003. Doutorado em Educação – Faculdade de Educação, Universidade Estadual de Campinas, Campinas/SP. AQUECEDOR: SOS ANIMAL. Disponível em:<http://www.sosanimalpetshop.com.br/d/aquarismo>>. Acesso em:28 maio 2013. BOMBA CENTRÍFUGA: AQUARIOREEF. Disponível em: <http://www.aquarioreef.com/produtos.php?sub=13&fam=9>. Acesso em: 27 maio 2013.
CETINKUNT,Sabri. Mecatrônica. Tradução
e revisão técnica, Jorge Luís Machado do Amaral, José Franco Machado do Amaral.
–Rio de Janeiro: LTC, 2008.
CLP PIC flexis II: SMART RADIO. Disponível em: <http://www.smartradio.com.br/>. Acesso em: 24 maio 2013.
COMPRESSOR DE AR: AQUAKING. Disponível em: <http://www.aquaking.com.br/>. Acesso em:29 maio 2013.
CORREIA E POLIA: UOL EDUCAÇÃO. Disponível em:<http://educacao.uol.com.br/disciplinas/fisica/polias-e-engrenagens-movimento-e-frequencia.htm>. Acesso em: 26 maio 2013.
CORTELETTI,Daniel.Centro Tecnológico de Mecatrônica – SENAI. Manual LDmicro 2007. Disponível em:<http://www.smartradio.com.br/>. Acesso em:24 maio 2013.
CARRON,Wilson; GUIMARÃES, Oliveira. Física.São Paulo,2003. Disponível em:<http://pt.scribd.com/doc/73278694/Inducao-Forca-Magnetica>. Acesso
em: 20 maio 2013.
52
FRANCHI, Claiton Moro; CAMARGO, Valter Luís Arlindo de. Controladores Lógicos
Programáveis - Sistemas Discretos. São Paulo,2008.Disponível em:
<tconline.feevale.br/tc/files/0001 >. Acesso em: 10 maio 2013.
GIMENEZ, Salvador P.Microcontroladores 8051: teoria do hardware e do software /
apli ações em ntr le igital / Lab ratóri e simulaçã ,” PearsonEducation do
Brasil Ltda, São Paulo, 2002. ISBN: 85.87918-28-1. Disponível em:
<http://www.leopoldina.cefetmg.br/moodle/pluginfile.php/2460/mod_resource/content
/1/Notas%20de%20Aula%208085%208086.pdf>. Acesso em: 27 maio 2013.
INSTITUTO NEWTON C. BRAGA. Disponível
em:<http://www.newtoncbraga.com.br/index.php/artigos/54-dicas/567 .Acesso em:
16 maio 2013.
KHEIR,N. A. et al.1996. Control Systems Engineering Education,Automatica, 32(2): 7− 66 Disponívelem:<http://www.labplan.ufsc.br/congressos/CBA2008/textos/CBA_2008_Artigos/42062.pdf>. Acesso em:24 maio 2013.
MOTOR DC 12 V.WILE-ELETRNONICA. Disponível em : <http://wile-eletronicos.mercadoshops.com.br/motor-dc-12v-pittman-com-
reducao_598xJM>. Acesso em:28 maio 2013.
NATALE, Ferdinando.Automação industrial, 2.ed.São Paulo: Érica, 2000.
SENSOR LDR. Ebah. Disponível em: <http://www.ebah.com.br/content/ABAAAAPOMAF/sensores-ldr>. Acesso em: 27 maio 2013. SOUZA, Vitor A. A História e as diferenças entre um microcontrolador e um
microprocessador. 2007.Disponível em:<http://www.cerne-tec.com.br/artigos.htm>.
Acesso em: 24 maio 2013.
TERMOSTATO.Mecatrônicaatual.Disponível em: <http://www.mecatronicaatual.com.br/secoes/leitura/206>. Acesso em:27 maio 2013. .





























