Embed Size (px)
Citation preview
Compressed Sensing meets
Information Theory
Dror [email protected]/people/drorb
Duarte
Wakin
Sarvotham
Baraniuk
Guo
Shamai
• Sensing, Computation, Communication– fast, readily available, cheap
• Progress in individual disciplines (computing, networks, comm, DSP, …)
Technology Breakthroughs

The Data Deluge
The Data Deluge• Challenges:
– Exponentially increasing amounts of data myriad different modalities
(audio, image, video, financial, seismic, weather …) global scale acquisition
– Analysis/processing hampered by slowing Moore’s law finding “needle in haystack”
– Energy consumption
• Opportunities (today)
From Sampling to Compressed Sensing
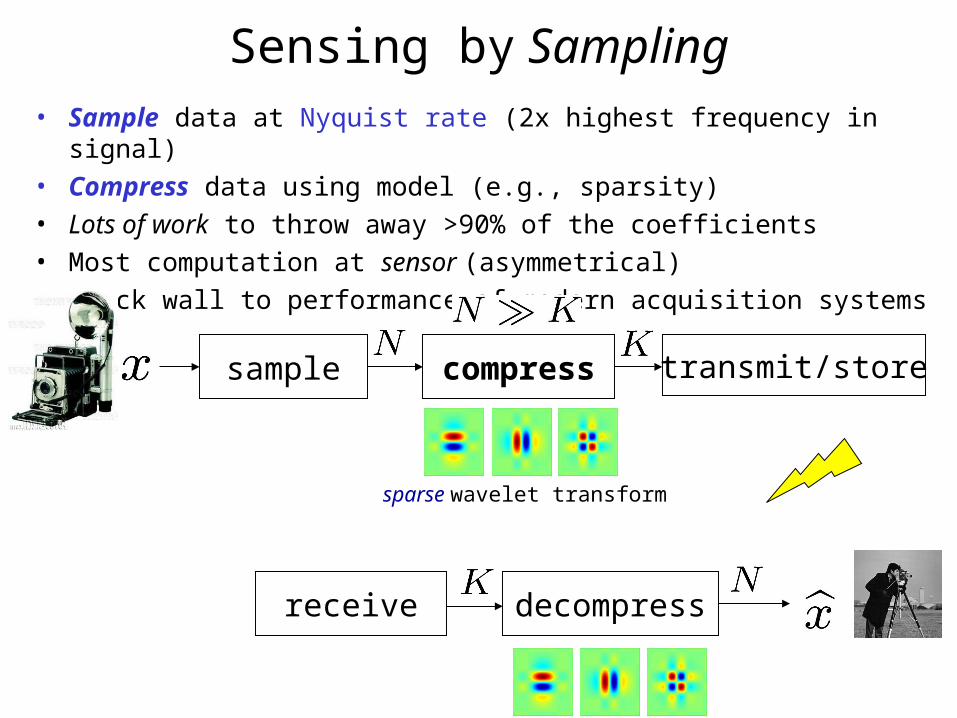
Sensing by Sampling• Sample data at Nyquist rate (2x highest frequency in signal)• Compress data using model (e.g., sparsity)• Lots of work to throw away >90% of the coefficients• Most computation at sensor (asymmetrical)• Brick wall to performance of modern acquisition systems
compress transmit/store
receive decompress
sample
sparse wavelet transform
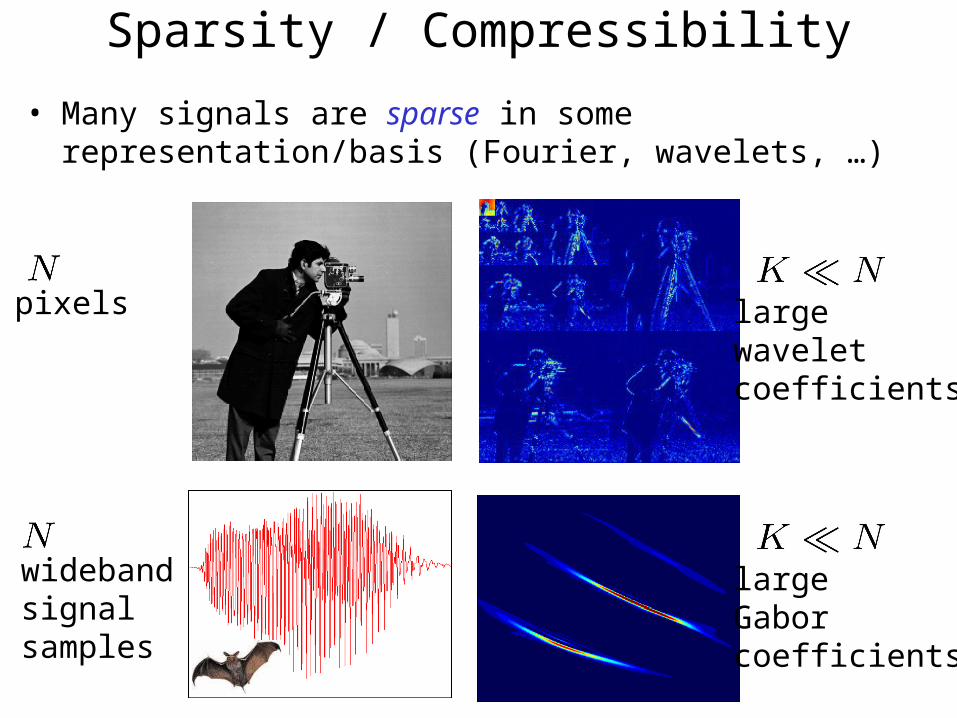
Sparsity / Compressibility
pixels largewaveletcoefficients
widebandsignalsamples
largeGaborcoefficients
• Many signals are sparse in some representation/basis (Fourier, wavelets, …)
Compressed Sensing
• Shannon/Nyquist sampling theorem– must sample at 2x highest frequency in signal– worst case bound for any bandlimited signal– too pessimistic for some classes of signals– does not exploit signal sparsity/compressibility
• Seek direct sensing of compressible information
• Compressed Sensing (CS)– sparse signals can be recovered from a small number
of nonadaptive (fixed) linear measurements– [Candes et al.; Donoho; Rice,…]
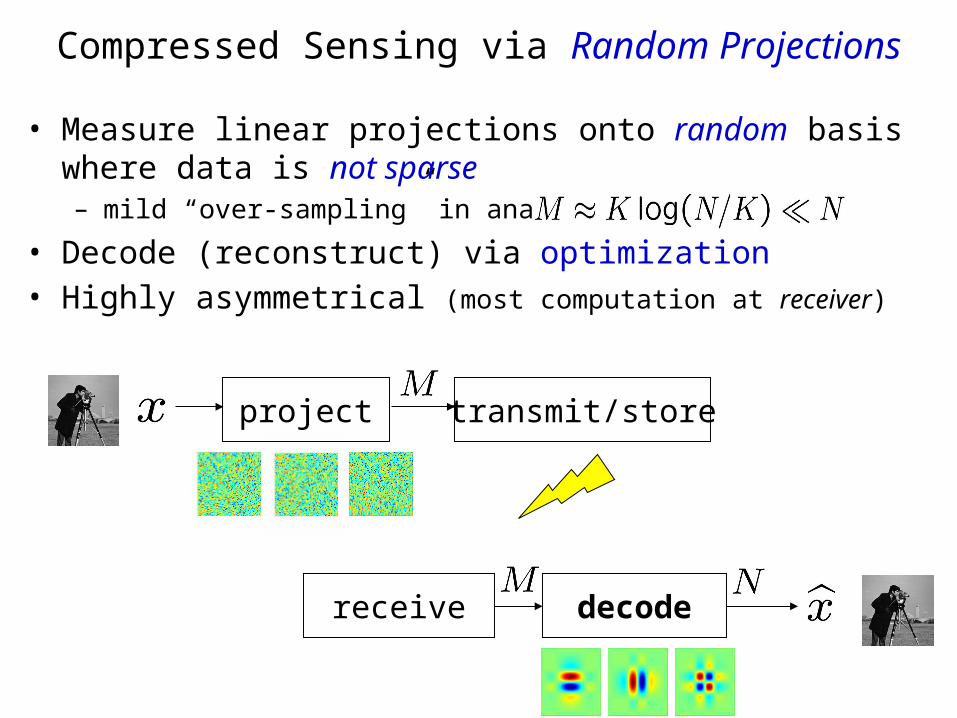
• Measure linear projections onto random basis where data is not sparse– mild “over-sampling” in analog
• Decode (reconstruct) via optimization • Highly asymmetrical (most computation at receiver)
Compressed Sensing via Random Projections
project transmit/store
receive decode
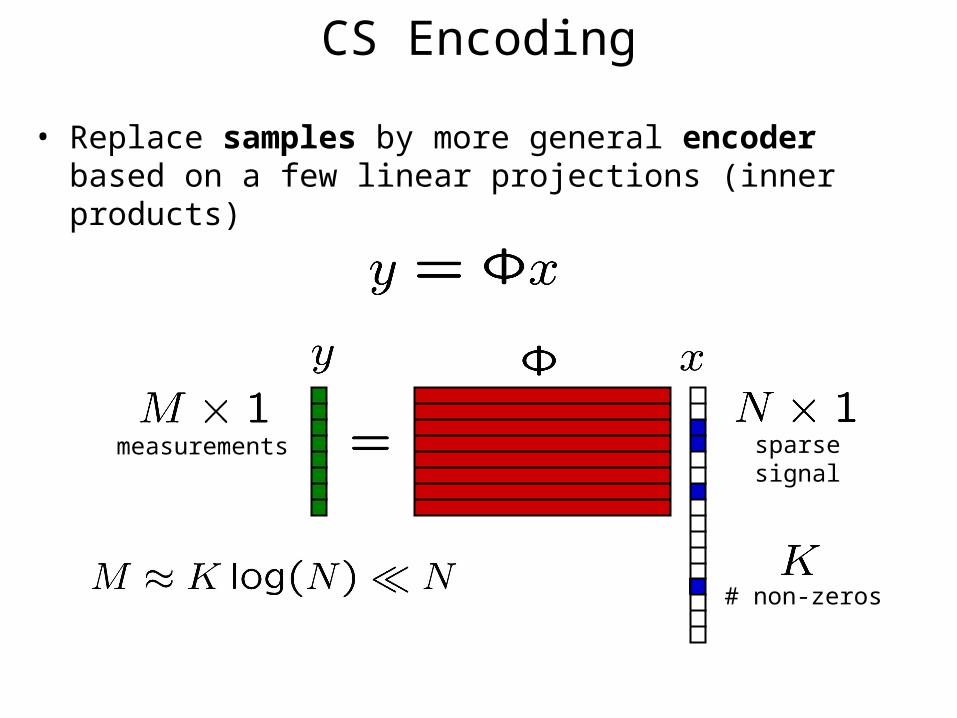
CS Encoding
• Replace samples by more general encoder based on a few linear projections (inner products)
measurements sparsesignal
# non-zeros
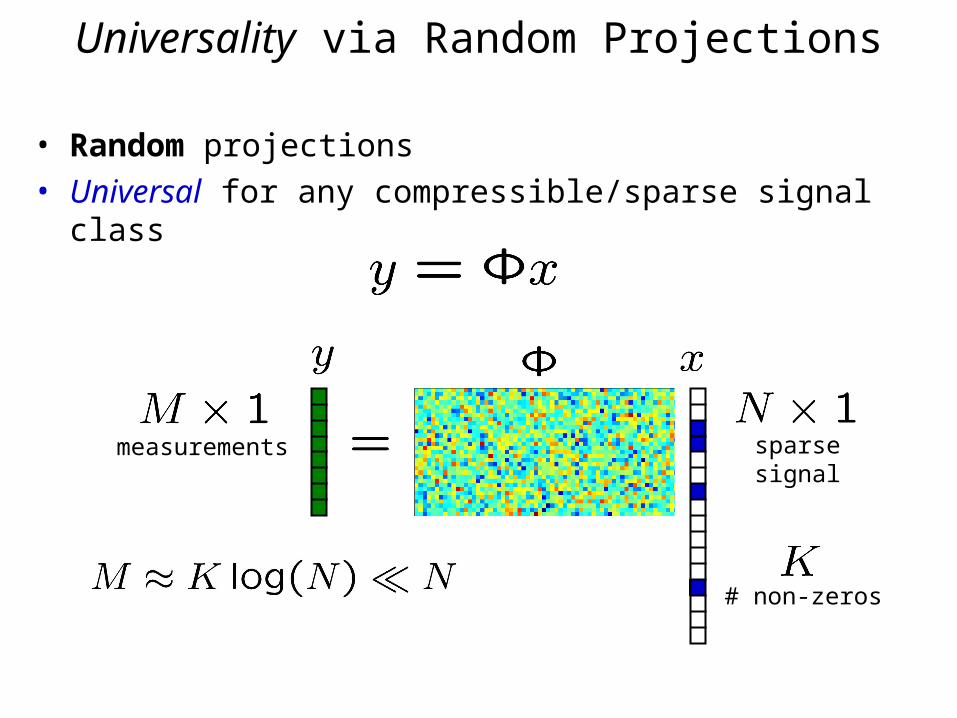
• Random projections• Universal for any compressible/sparse signal class
measurements sparsesignal
Universality via Random Projections
# non-zeros
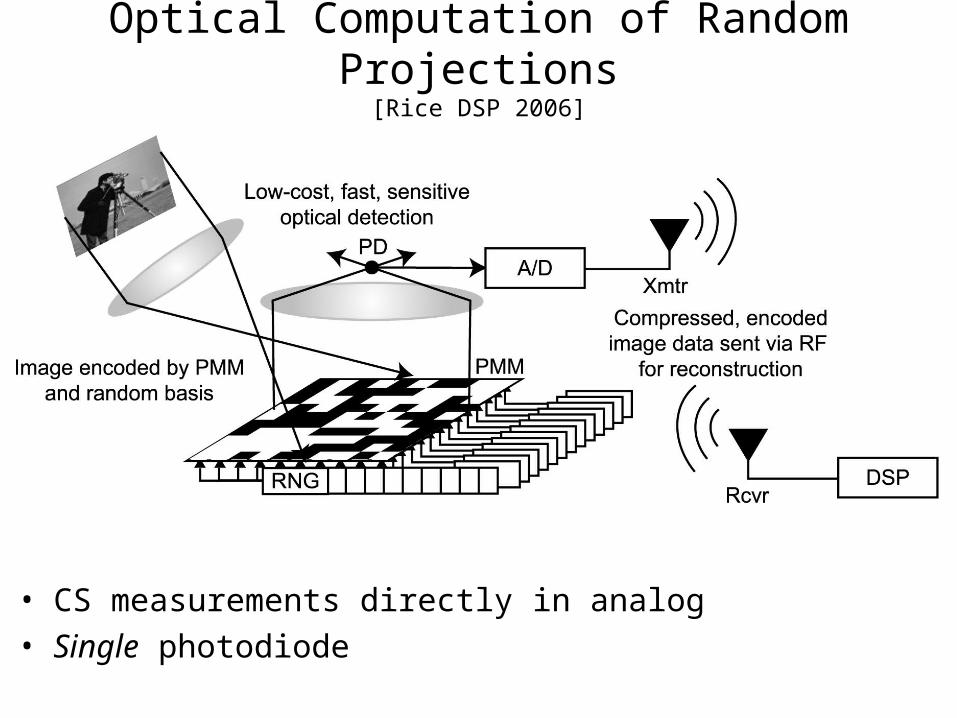
Optical Computation of Random Projections[Rice DSP 2006]
• CS measurements directly in analog• Single photodiode
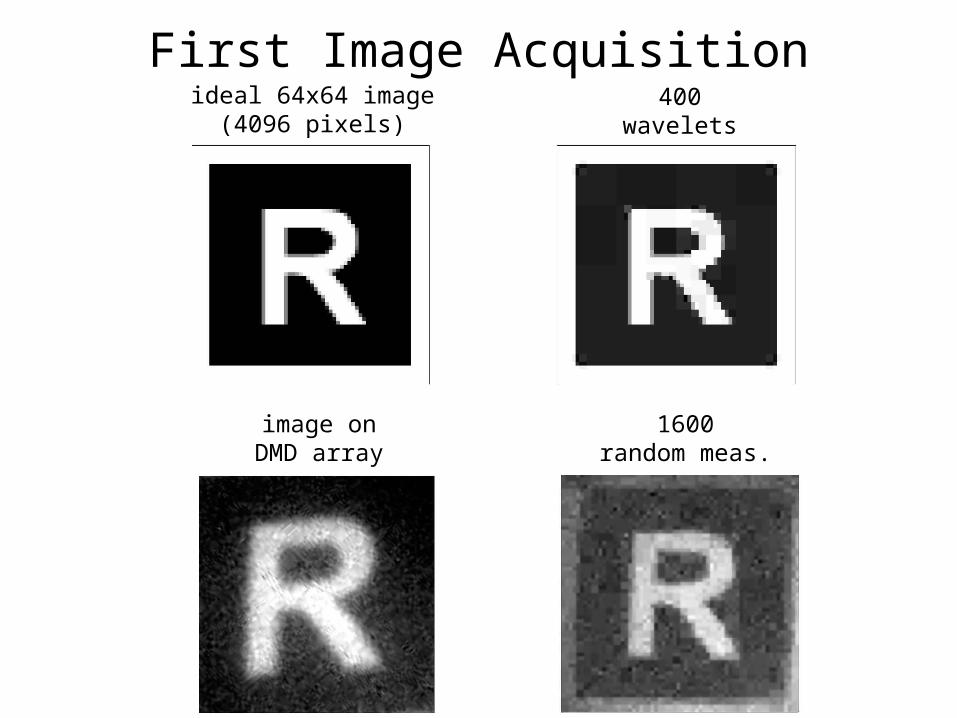
First Image Acquisitionideal 64x64 image
(4096 pixels)400
wavelets
image onDMD array
1600random meas.

• Goal: find x given y• Ill-posed inverse problem
• Decoding approach– search over subspace of explanations to measurements– find “most likely” explanation– universality accounted for during optimization
• Linear program decoding [Candes et al., Donoho] – small number of samples – computationally tractable
• Variations– greedy (matching pursuit) [Tropp et al., Needell et al.,...]
– optimization [Hale et al., Figueiredo et al.]
CS Signal Decoding
CS Hallmarks• CS changes rules of data acquisition game
– exploits a priori sparsity information to reduce #measurements
• Hardware/software: Universality– same random projections for any compressible signal class
– simplifies hardware and algorithm design
• Processing: Information scalability– random projections ~ sufficient statistics– same random projections for range of tasks
decoding > estimation > recognition > detection– far fewer measurements required to detect/recognize
• Next generation data acquisition new imaging devices– new distributed source coding algorithms [Baron et al.]
CS meets Information Theoretic Bounds[Sarvotham, Baron, & Baraniuk 2006][Guo, Baron, & Shamai 2009]
Fundamental Goal: Minimize
• Compressed sensing aims to minimize resource consumption due to measurements
• Donoho: “Why go to so much effort to acquire all the data when most of what we get will be thrown away?”
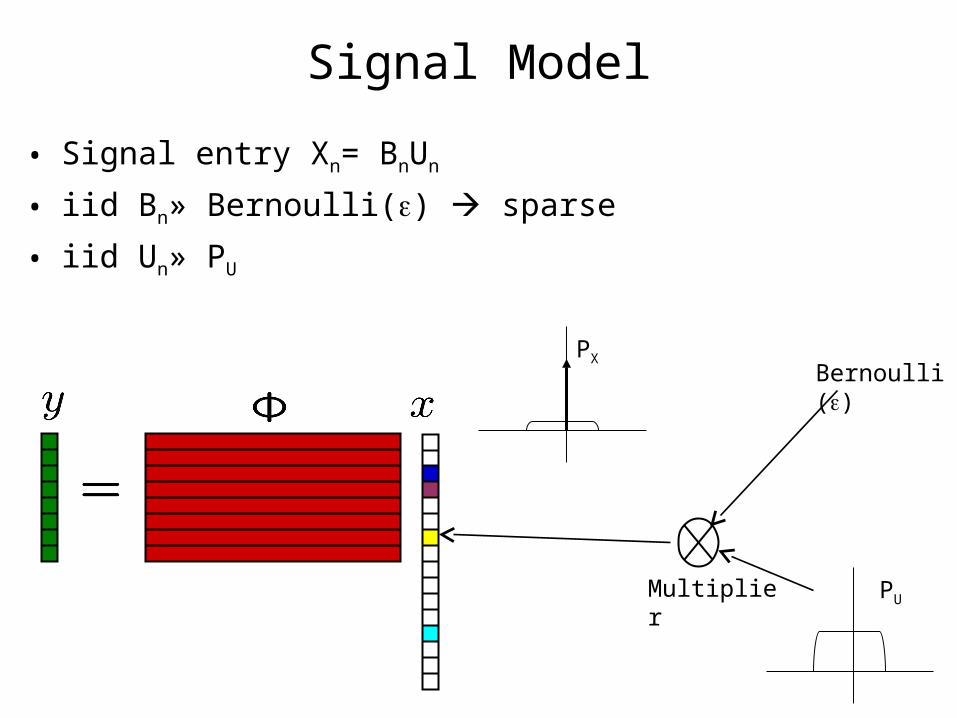
Signal Model
• Signal entry Xn= BnUn
• iid Bn» Bernoulli() sparse
• iid Un» PU
PU
Bernoulli()
Multiplier
PX
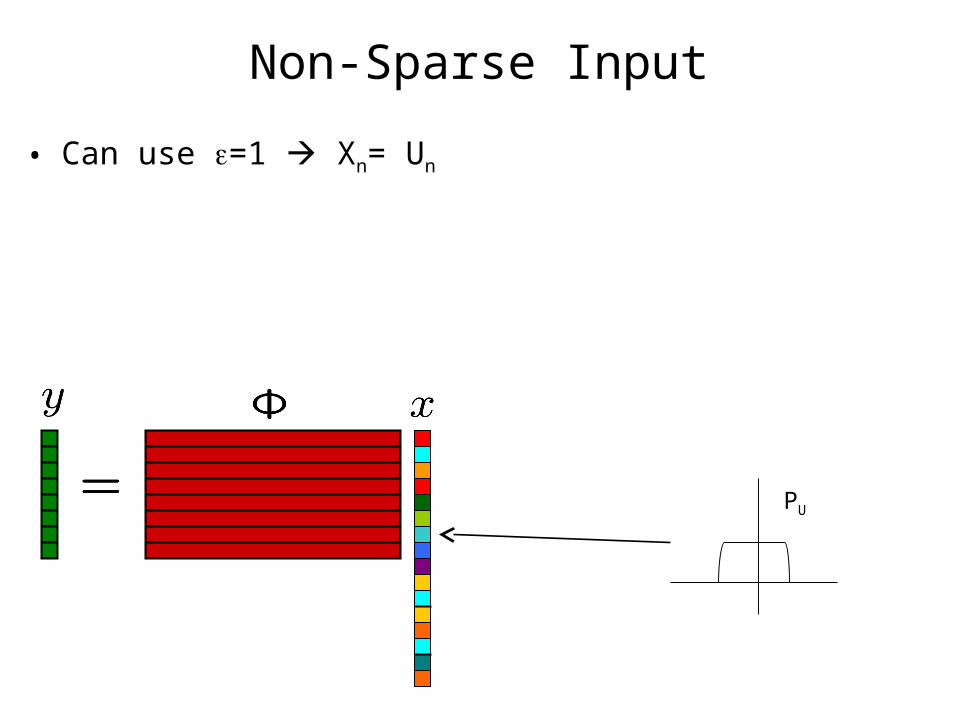
Non-Sparse Input
• Can use =1 Xn= Un
PU
Measurement Noise• Measurement process is typically analog• Analog systems add noise, non-linearities, etc.
• Assume Gaussian noise for ease of analysis
• Can be generalized to non-Gaussian noise
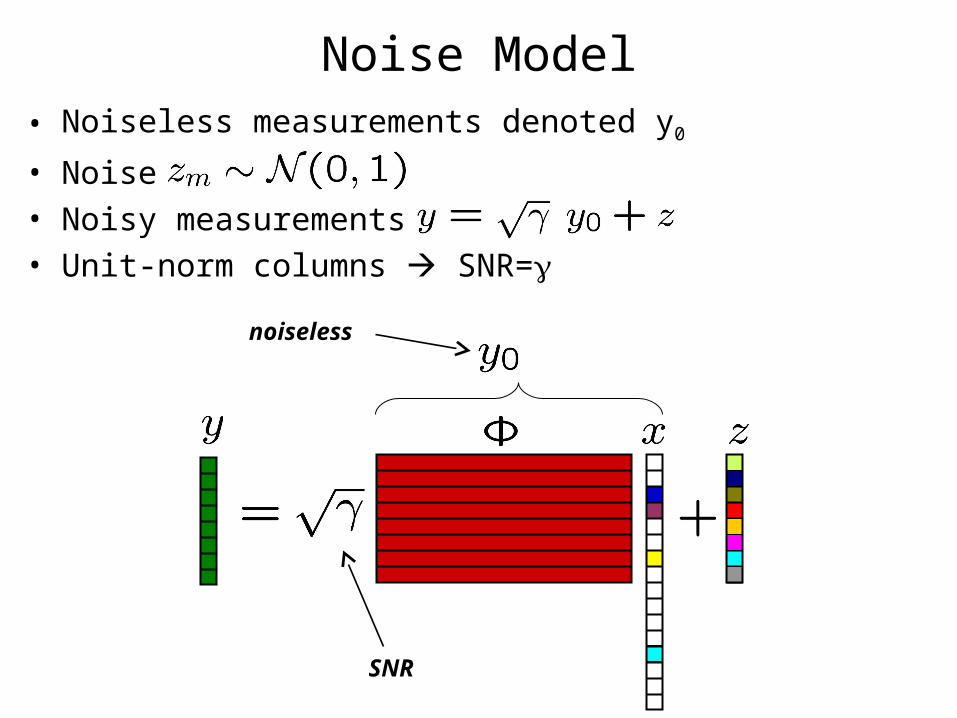
• Noiseless measurements denoted y0
• Noise• Noisy measurements• Unit-norm columns SNR=
Noise Model
noiseless
SNR
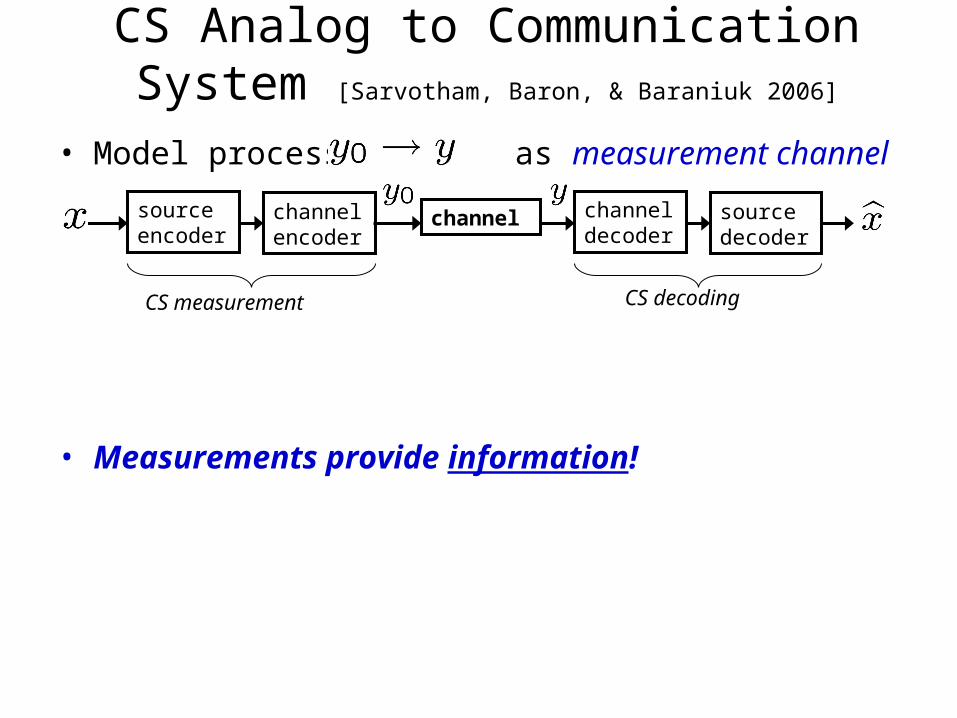
• Model process as measurement channel
• Measurements provide information!
channel
CS measurement CS decoding
source encoder
channel encoder
channel decoder
source decoder
CS Analog to Communication System [Sarvotham, Baron, & Baraniuk 2006]
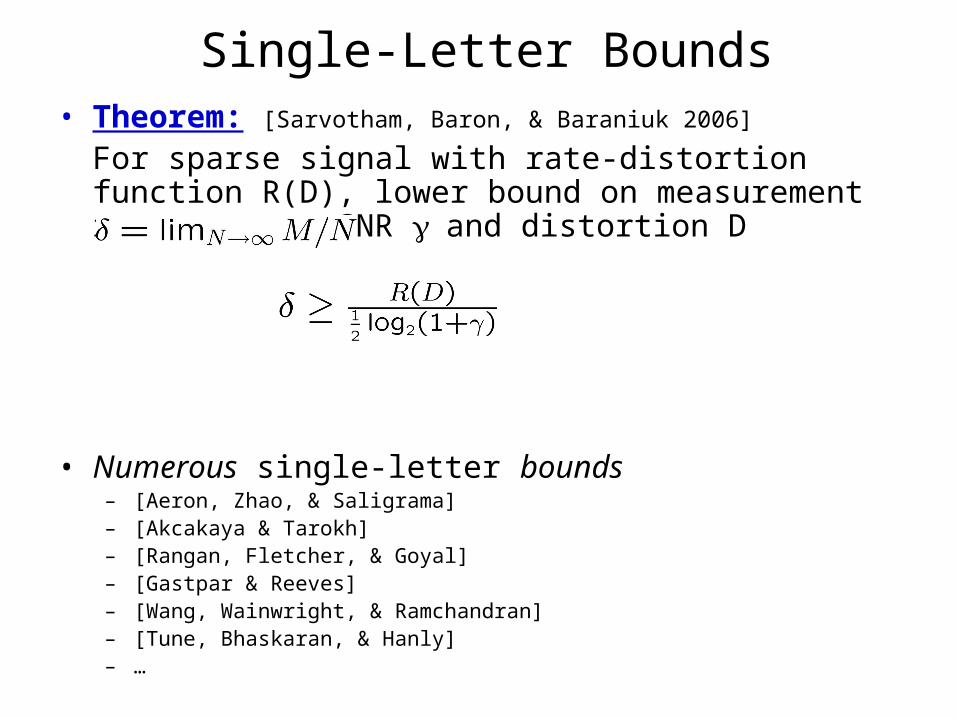
• Theorem: [Sarvotham, Baron, & Baraniuk 2006] For sparse signal with rate-distortion function R(D), lower bound on measurement rate
s.t. SNR and distortion D
• Numerous single-letter bounds – [Aeron, Zhao, & Saligrama]– [Akcakaya & Tarokh]– [Rangan, Fletcher, & Goyal]– [Gastpar & Reeves]– [Wang, Wainwright, & Ramchandran]– [Tune, Bhaskaran, & Hanly]– …
Single-Letter Bounds
Goal: Precise Single-letter Characterization of Optimal CS
[Guo, Baron, & Shamai 2009]
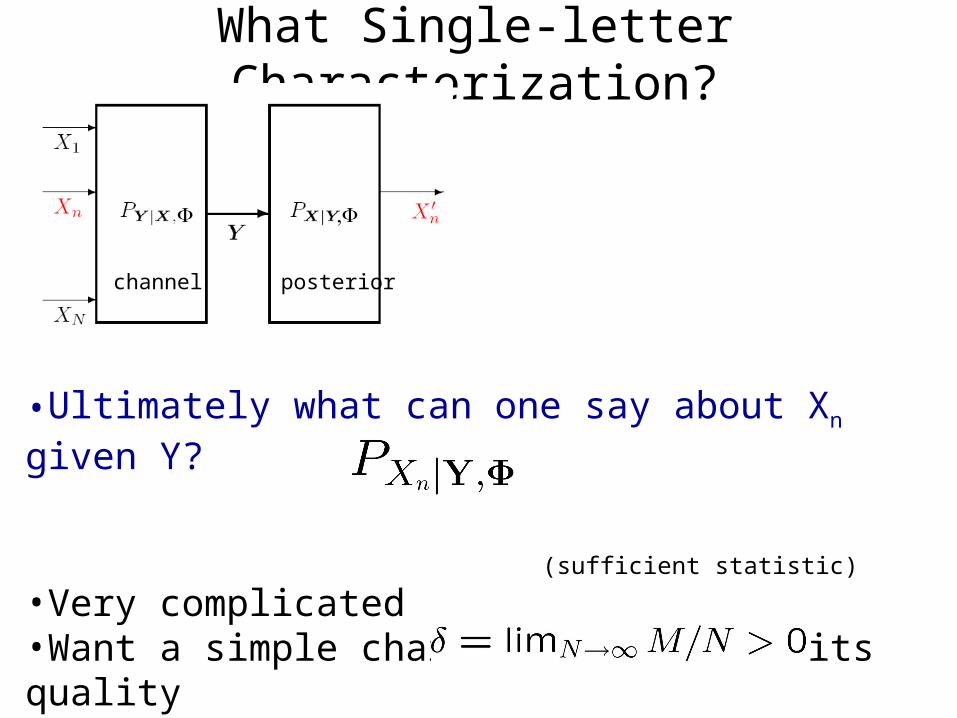
What Single-letter Characterization?
•Ultimately what can one say about Xn given Y?
(sufficient statistic)
•Very complicated•Want a simple characterization of its quality•Large-system limit:
channel posterior
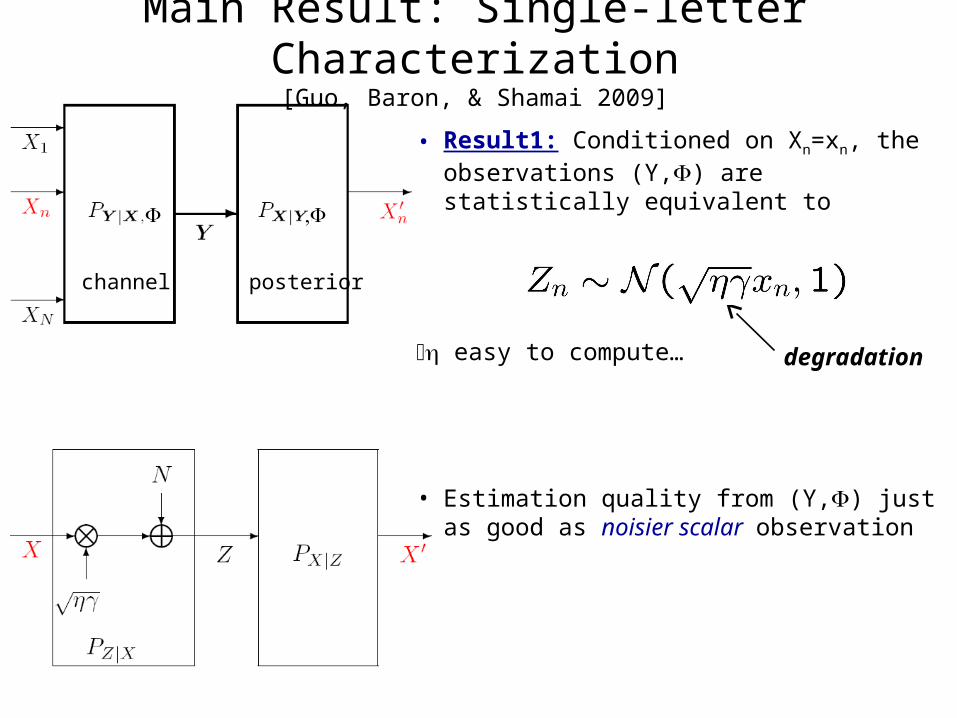
Main Result: Single-letter Characterization[Guo, Baron, & Shamai 2009]
• Result1: Conditioned on Xn=xn, the observations (Y,) are statistically equivalent to
easy to compute…
• Estimation quality from (Y,) just as good as noisier scalar observation
degradation
channel posterior
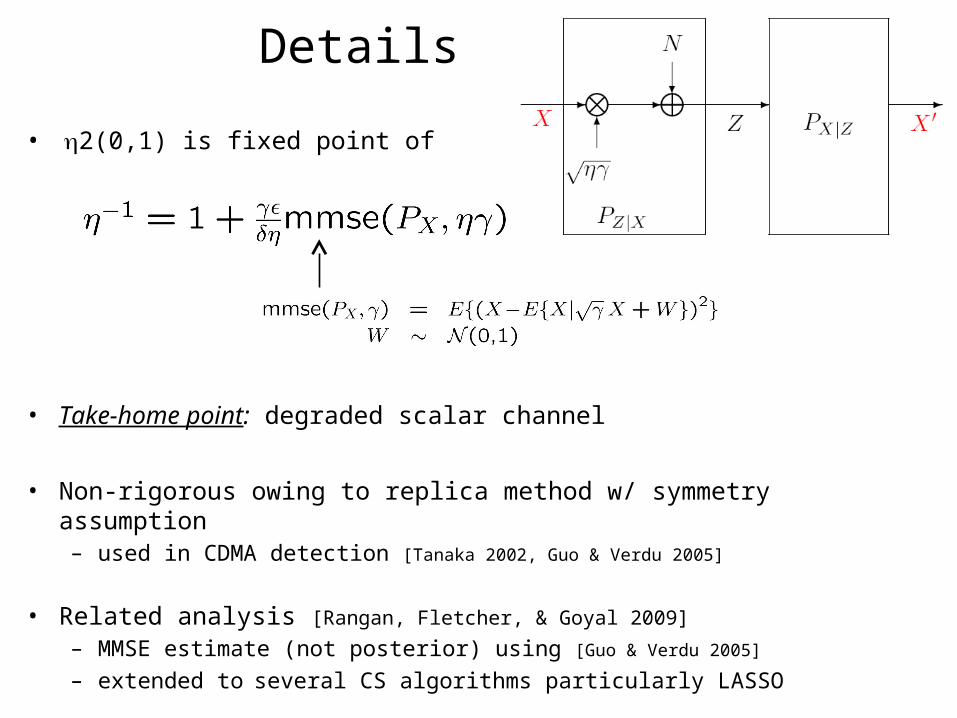
• 2(0,1) is fixed point of
• Take-home point: degraded scalar channel
• Non-rigorous owing to replica method w/ symmetry assumption– used in CDMA detection [Tanaka 2002, Guo & Verdu 2005]
• Related analysis [Rangan, Fletcher, & Goyal 2009] – MMSE estimate (not posterior) using [Guo & Verdu 2005]
– extended to several CS algorithms particularly LASSO
Details
Decoupling
• Result2: Large system limit; any arbitrary (constant) L input elements decouple:
• Take-home point: individual posteriors statistically independent
Decoupling Result[Guo, Baron, & Shamai 2009]

Sparse Measurement Matrices
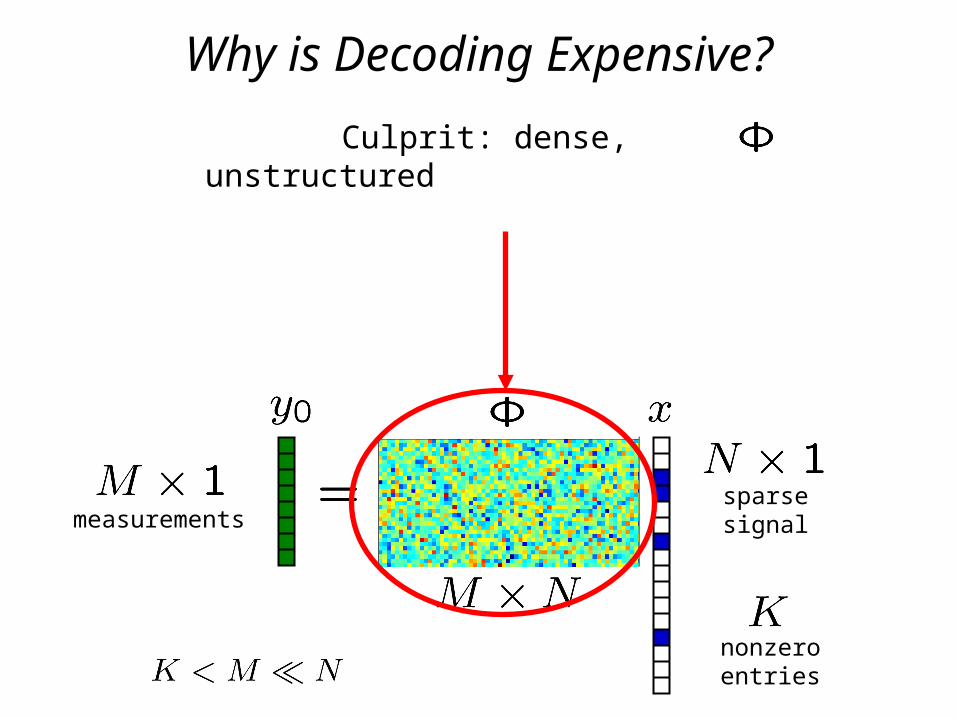
Why is Decoding Expensive?
measurementssparsesignal
nonzeroentries
Culprit: dense, unstructured
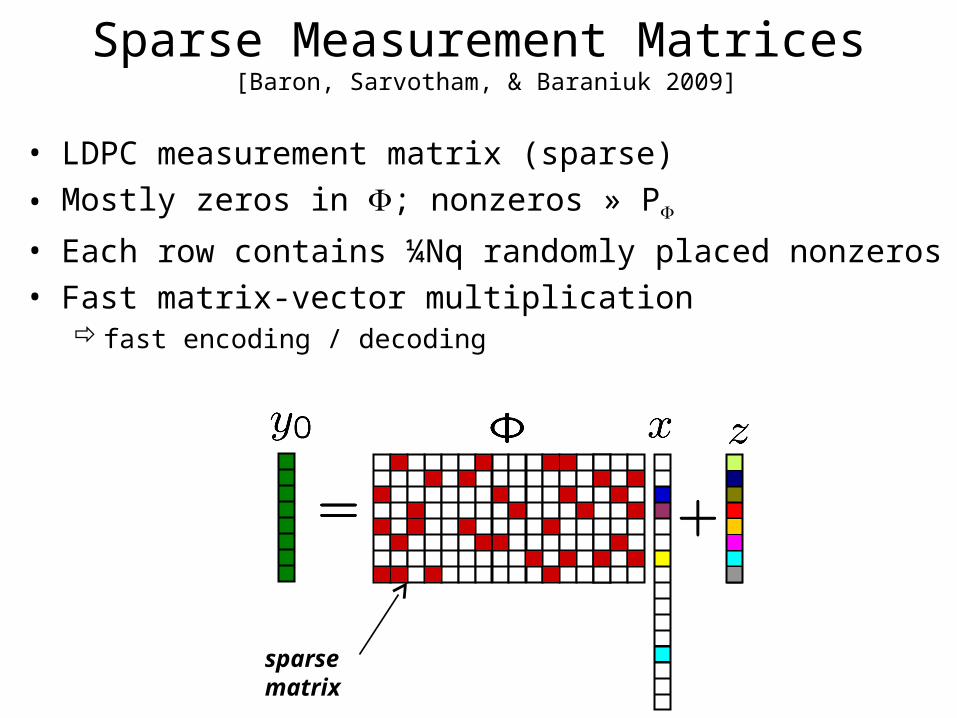
Sparse Measurement Matrices [Baron, Sarvotham, & Baraniuk 2009]
• LDPC measurement matrix (sparse)
• Mostly zeros in ; nonzeros » P
• Each row contains ¼Nq randomly placed nonzeros • Fast matrix-vector multiplication
fast encoding / decoding
sparse matrix
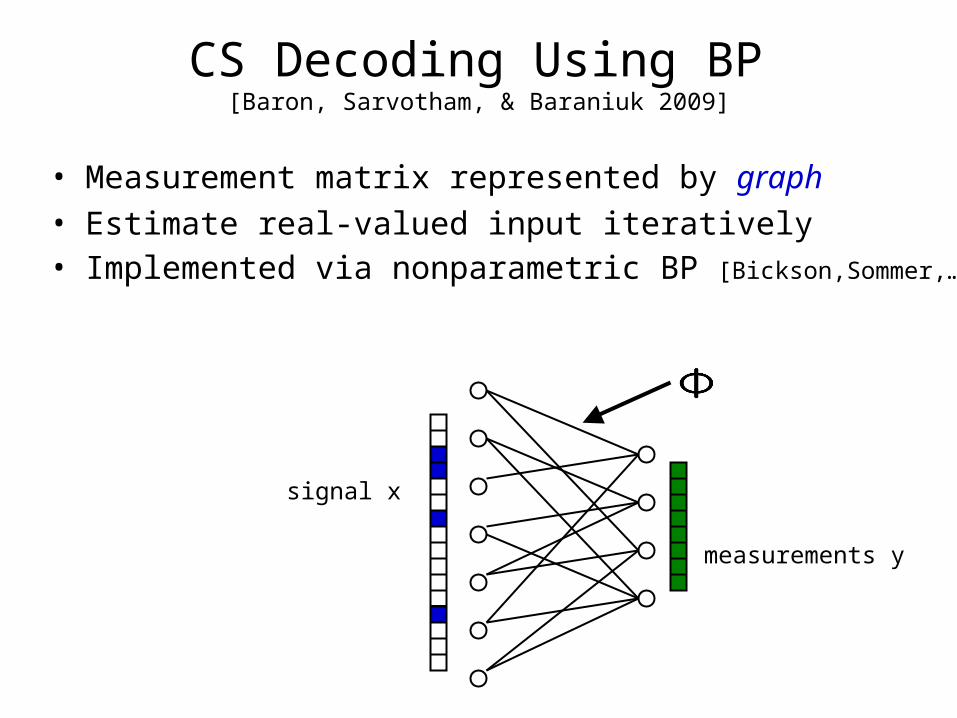
CS Decoding Using BP [Baron, Sarvotham, & Baraniuk 2009]
• Measurement matrix represented by graph • Estimate real-valued input iteratively• Implemented via nonparametric BP [Bickson,Sommer,…]
measurements y
signal x
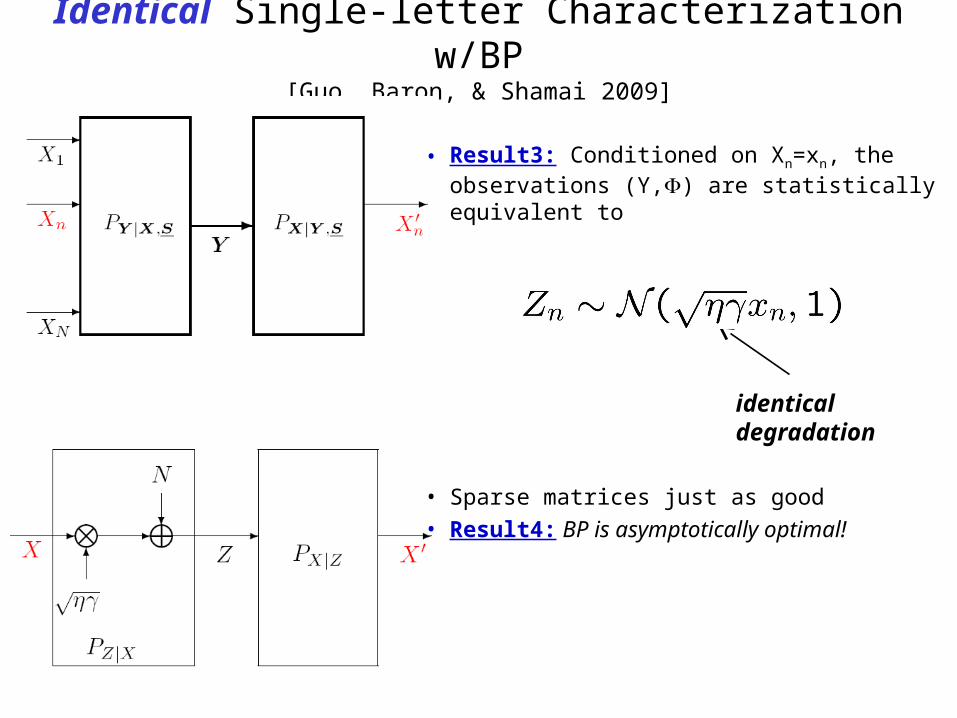
Identical Single-letter Characterization w/BP[Guo, Baron, & Shamai 2009]
• Result3: Conditioned on Xn=xn, the observations (Y,) are statistically equivalent to
• Sparse matrices just as good• Result4: BP is asymptotically optimal!
identical degradation

Decoupling Between Two Input Entries (N=500, M=250, =0.1, =10)
density
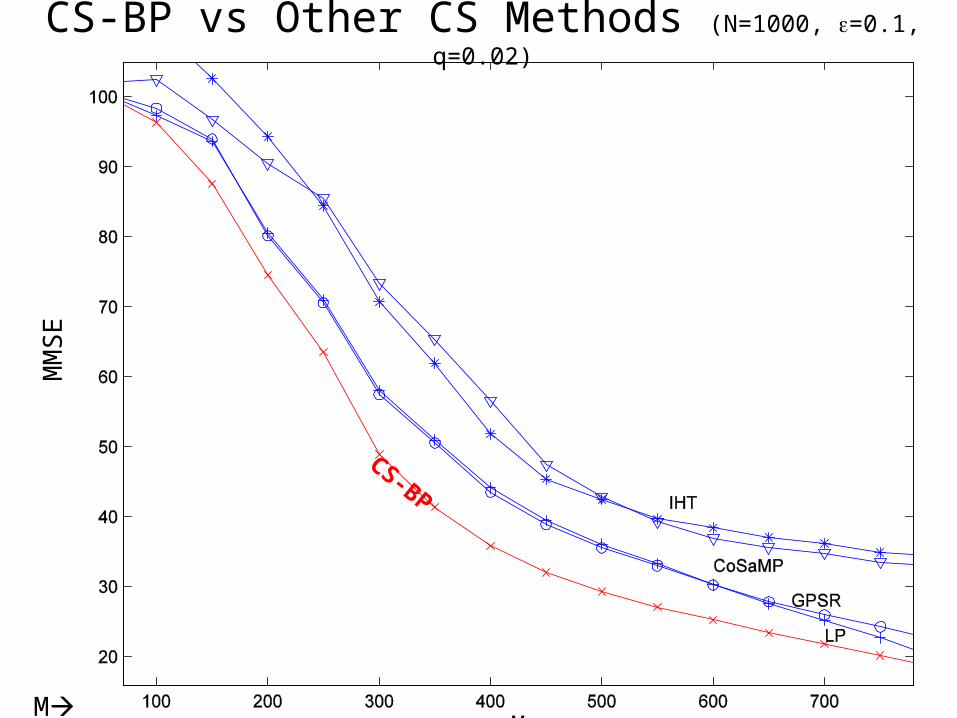
CS-BP vs Other CS Methods (N=1000, =0.1, q=0.02)
M
MM
SE
CS-BP
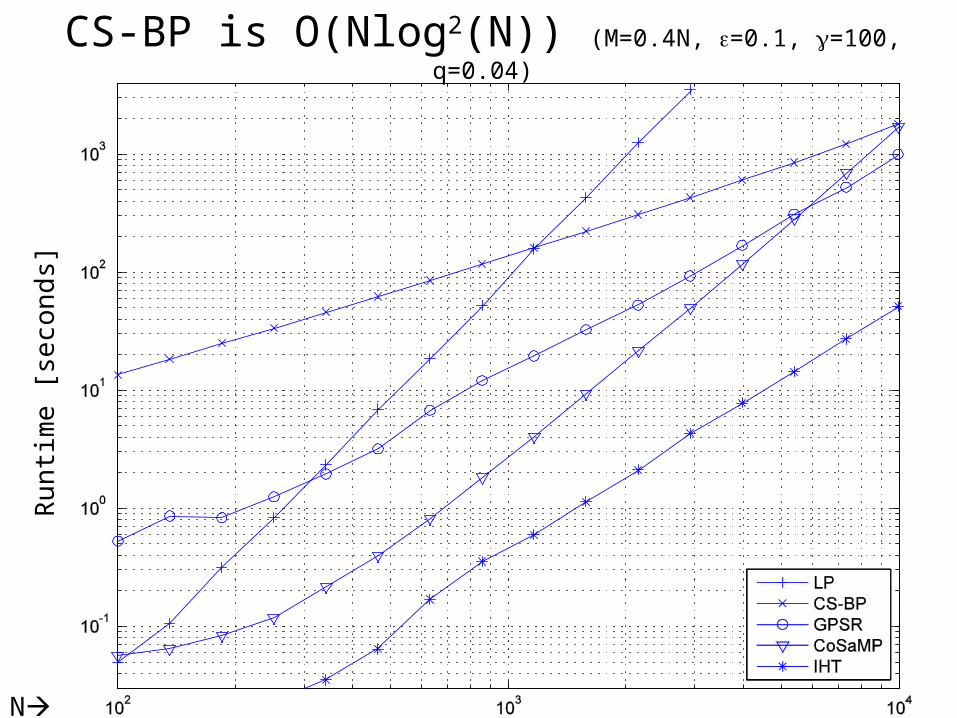
CS-BP is O(Nlog2(N)) (M=0.4N, =0.1, =100, q=0.04)R
un
tim
e [
seco
nd
s]
N

Fast CS Decoding [Sarvotham, Baron, & Baraniuk 2006]

Setting
measurementssparsesignal
nonzeroentries
• LDPC measurement matrix (sparse)• Fast matrix-vector multiplication • Assumptions:
– noiseless measurements– strictly sparse signal
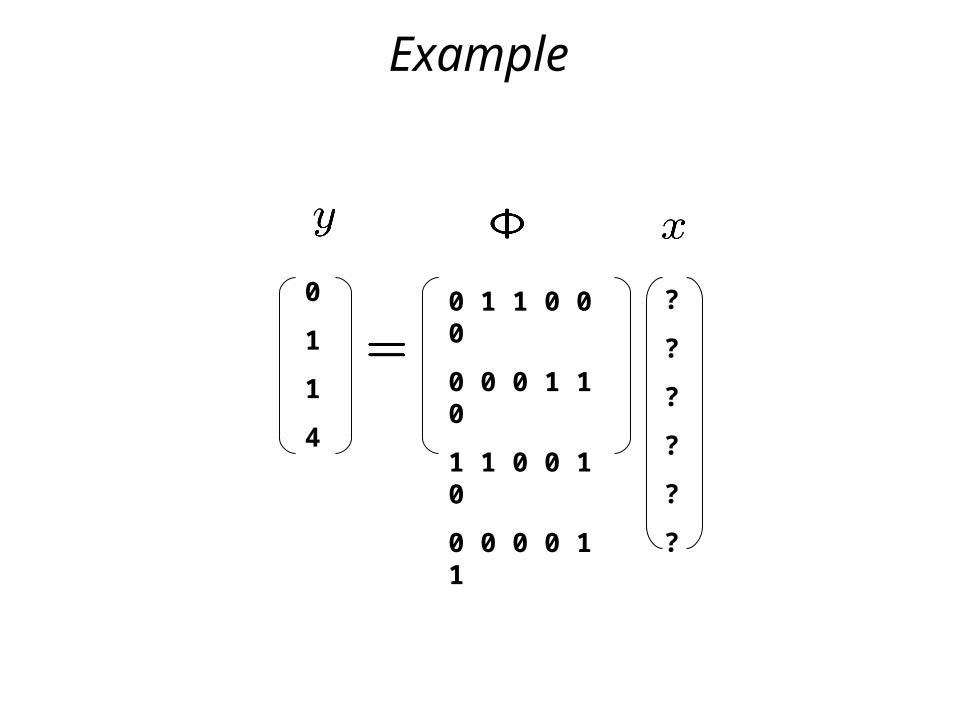
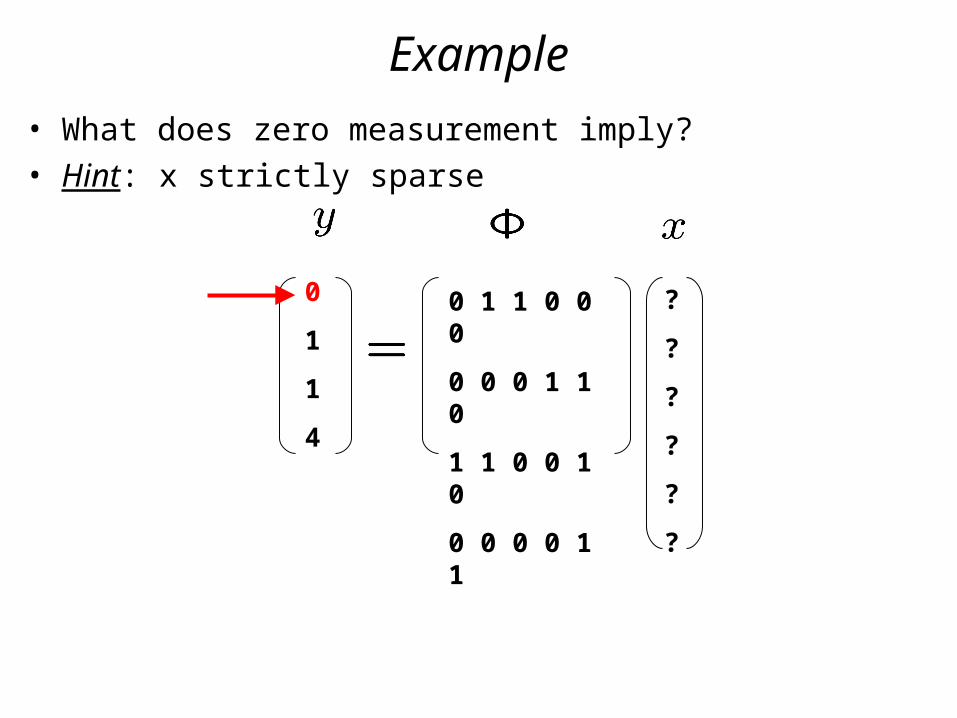
Example
0
1
1
4
0 1 1 0 0 0
0 0 0 1 1 0
1 1 0 0 1 0
0 0 0 0 1 1
?
?
?
?
?
?
Example
0
1
1
4
0 1 1 0 0 0
0 0 0 1 1 0
1 1 0 0 1 0
0 0 0 0 1 1
?
?
?
?
?
?
• What does zero measurement imply?• Hint: x strictly sparse
Example
0
1
1
4
0 1 1 0 0 0
0 0 0 1 1 0
1 1 0 0 1 0
0 0 0 0 1 1
?
0
0
?
?
?
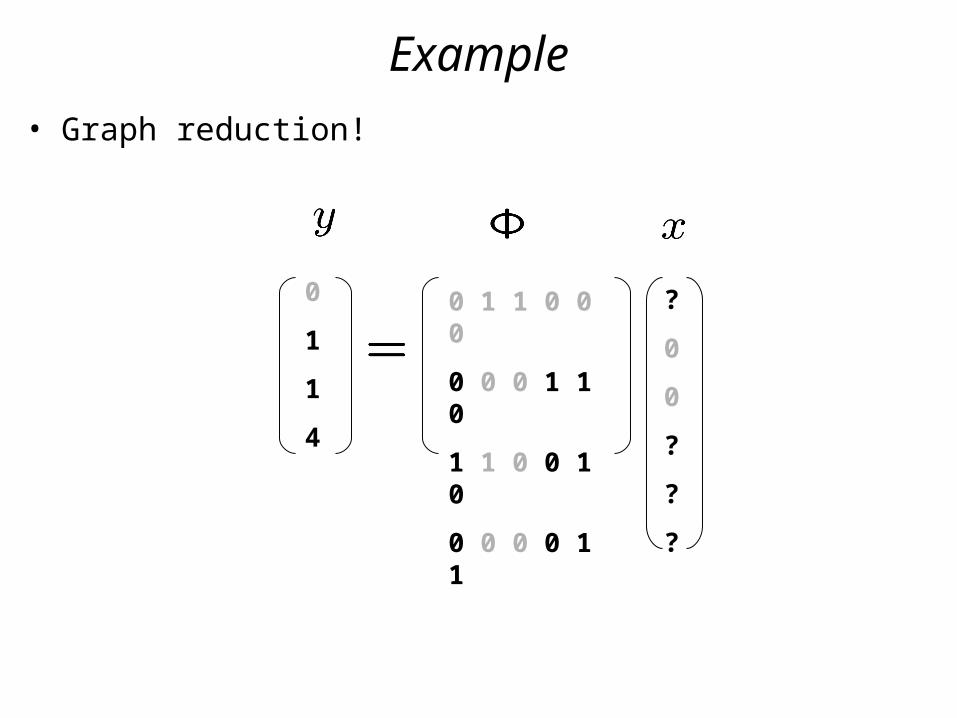
• Graph reduction!
Example
0
1
1
4
0 1 1 0 0 0
0 0 0 1 1 0
1 1 0 0 1 0
0 0 0 0 1 1
?
0
0
?
?
?
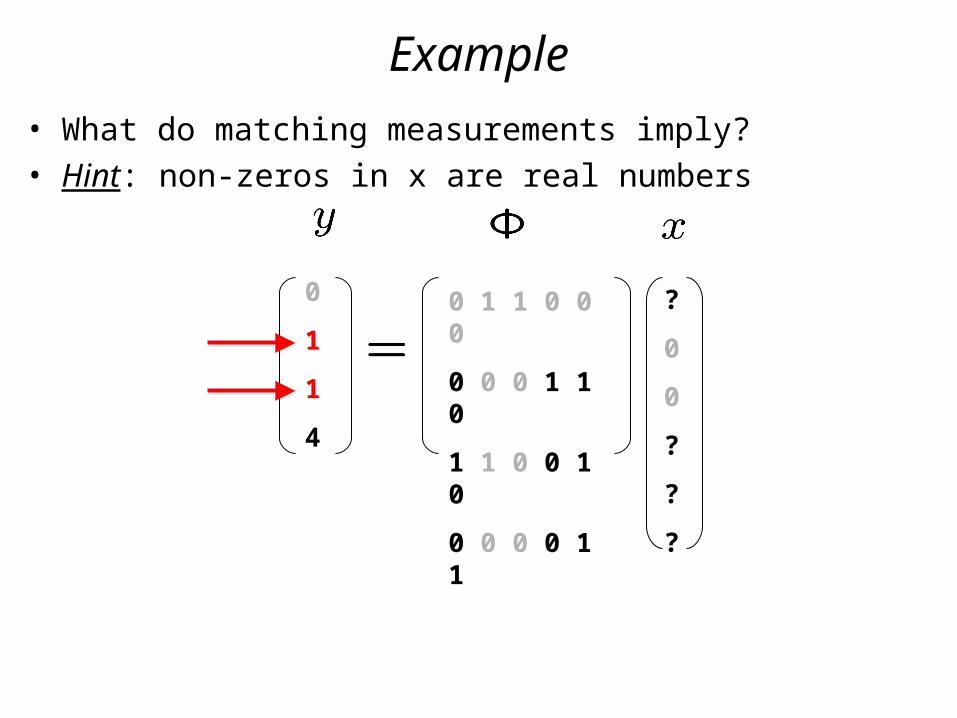
• What do matching measurements imply?• Hint: non-zeros in x are real numbers
Example
0
1
1
4
0 1 1 0 0 0
0 0 0 1 1 0
1 1 0 0 1 0
0 0 0 0 1 1
0
0
0
0
1
?
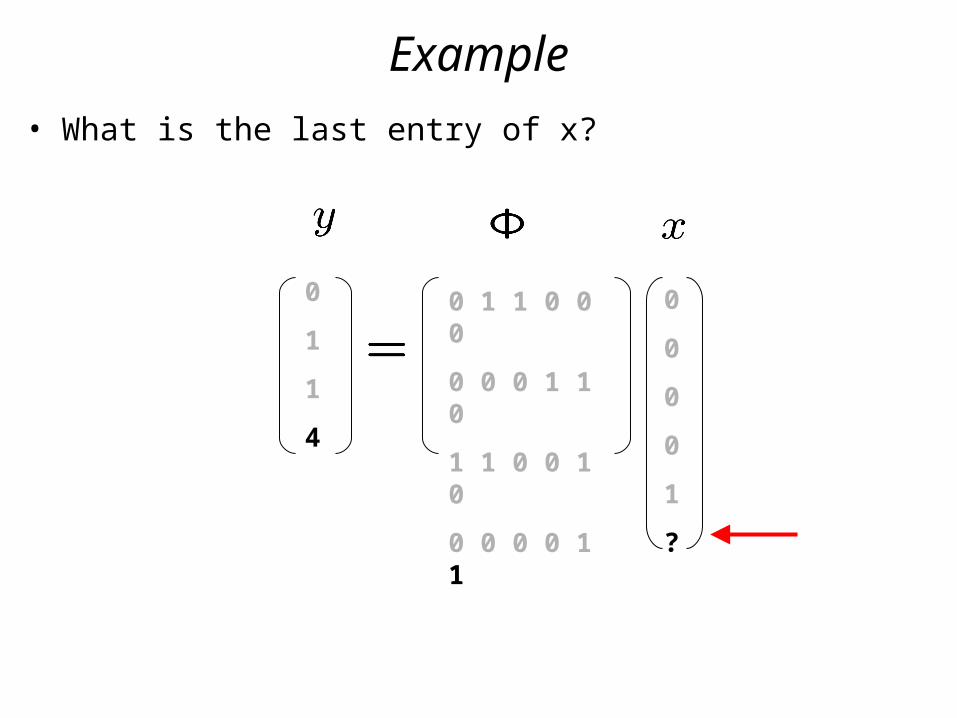
• What is the last entry of x?
Main Results [Sarvotham, Baron, & Baraniuk 2006]
• # nonzeros per row• # measurements• Fast encoder and decoder
– sub-linear decoding complexity
• Can be used for distributed content distribution– measurements stored on different servers– any M measurements suffice
• Strictly sparse signals, noiseless measurements

Related Direction: Linear Measurements
unified theory for linear measurement systems

Linear Measurements in Finance
• Fama and French three factor model (1993)– stock returns explained by linear exposure to factors
e.g., “market” (change in stock market index)– numerous factors can be used (e.g., earnings to price)
• Noisy linear measurements
stock returns unexplained
(typically big)
exposuresfactor returns

Financial Prediction• Explanatory power ¼ prediction (can invest on this)• Goal: estimate x to explain y well
• Financial prediction vs CS: longer y, shorter x• Sounds easy, nonetheless challenging
– NOISY data need lots of measurements– nonlinear, nonstationary
compressed sensing financial prediction
Application Areas for Linear Measurements
• DSP (CS)
• Finance
• Medical imaging (tomography)
• Information retrieval
• Seismic imaging (oil industry)
Unified Theory of Linear Measurement
• Common goals– minimal resources – robustness– computationally tractable
• Inverse problems
• Striving toward theory and efficient processing in linear measurement systems
THE END